
測位装置

【課題】スリップフォーム成型機の施工時にセンサロープの張設を不要とする測位装置を提供する。
【解決手段】スリップフォーム成型機におけるモールドの施工位置を測位する測位装置は、モールドの施工高さ及び施工方向の基準として、上下に並行して延設された2本の導線11bと、給電により導線11bからそれぞれ生じる磁界によって誘導電流I1,I2を発生する磁界検知回路13と、誘導電流I1,I2に基づいて上下位置を測位する上下方向測位回路14と、誘導電流I1,I2に係る電圧に基づいて左右位置を測位する左右方向測位回路15と、を含んで構成される。
【解決手段】スリップフォーム成型機におけるモールドの施工位置を測位する測位装置は、モールドの施工高さ及び施工方向の基準として、上下に並行して延設された2本の導線11bと、給電により導線11bからそれぞれ生じる磁界によって誘導電流I1,I2を発生する磁界検知回路13と、誘導電流I1,I2に基づいて上下位置を測位する上下方向測位回路14と、誘導電流I1,I2に係る電圧に基づいて左右位置を測位する左右方向測位回路15と、を含んで構成される。
【発明の詳細な説明】
【技術分野】
【0001】
舗装又は道路構造物などを施工するための装置に関する技術が以下に開示される。
【背景技術】
【0002】
例えば、道路舗装を舗設する場合や道路端の縁石などのコンクリート構造物を施工する場合、スリップフォーム成型機と呼ばれる施工機械を使用したスリップフォーム工法が用いられる。一例としてコンクリート構造物を施工するスリップフォーム工法は、スリップフォーム成型機の有するモールド内に施工材料としてコンクリートを投入し、該モールド内部で締固め及び成型を行いつつスリップフォーム成型機を前進させることにより、コンクリート構造物を連続して施工していく工法である(非特許文献1)。
【0003】
構造物施工用のスリップフォーム成型機は、クローラやタイヤ式の走行装置に、施工材料を運搬車から供給するベルトコンベア等の搬送装置と、搬送装置により供給される施工材料を成型するための成型装置と、を組み付けた自走式の施工機械である。その成型装置として、モールド及びモールド内の締固め手段を備え、締固め手段には油圧や電動式バイブレータが主に使用される。当該成型装置は、締固め手段の振動により、モールド内でコンクリートの締固め、成型を行う。
【0004】
施工時のスリップフォーム成型機は、センサ制御に従って、成型装置であるモールドの施工高さ及び施工方向を制御する。すなわち、施工高さ及び施工方向の基準線となるセンサロープが施工現場に張設され、鉤形等の高さ制御用センサがセンサロープ上を這うことでモールドの上下方向の施工位置が測位される一方、垂下する棒状の方向制御用センサがセンサロープ横に接触することでモールドの左右方向の施工位置が測位される。そして、その測位結果に従って、モールドの施工高さが制御されると共に走行装置の操舵によりモールドの施工方向が制御される(特許文献1、非特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−290922号公報
【非特許文献】
【0006】
【非特許文献1】「スリップフォーム工法施工マニュアル(構造物編)」,平成20年3月,日本スリップフォーム工法協会(http://www.nsfa.jp/kyokai/manual.htmlからダウンロード可)
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記のように、スリップフォーム成型機等の施工機械による施工時には、センサロープを基準線として成型装置の施工位置が測位されるので、このセンサロープのたるみが大きいと測位の基準が狂う。したがって、センサロープは、高張力で真っ直ぐに張設する必要があるが、まったくたるみの無い状態に緊張させるのは難しい。現状では、なるべくたるみを少なくするため、数十センチから数メートル程度の定間隔でセンサピン、クランプ、ロッドを設置し、これによりセンサロープを張設している。この張設作業の手間が、人手を要したり、施工時間が長くなる原因の一つとなっている。
【0008】
また、橋梁やトンネル内の縁石施工などの場合、縁石の外側に余裕が無いので、高欄やトンネルの壁面に穿孔して専用ステイを設置し、該ステイによりセンサロープを張設することが行われている。この場合、穿孔した壁面の孔を施工後に埋め戻す作業も必要となるので、さらに不利益を被る。
【0009】
以上の背景に鑑みると、センサロープを張設する必要のない測位装置が望まれる。
【課題を解決するための手段】
【0010】
上記課題に対して提案する測位装置は、施工材料を成型するための成型装置を走行装置に組み付けた自走式の施工機械において前記成型装置の施工位置を測位する測位装置であって、
施工高さ及び施工方向の基準として、上下に並行して延設された2本の導線と、
給電により前記2本の導線からそれぞれ生じる磁界によって、第1及び第2の誘導電流を発生する磁界検知回路と、
前記第1及び第2の誘導電流に基づいて上下位置を測位する上下方向測位回路と、
前記第1及び第2の誘導電流に係る電圧に基づいて左右位置を測位する左右方向測位回路と、
を含んで構成される。
【発明の効果】
【0011】
上記提案の測位装置は、施工高さ及び施工方向の基準として導線を使用し、該導線に生じる磁界によって、非接触で施工位置を測位する。橋梁やトンネル内での施工を例にすれば、導線の延設作業は、高欄やトンネルの壁面に施工高さの線をけがき、このけがき線に沿って、接着剤や粘着テープ等により導線を貼り付けるという簡単な作業でよい。すなわち、センサロープ等の張設は不要である。
したがって、従来技術のように、高さを測量しながら一定間隔でクランプを設置して緊張させつつセンサロープを張設しなければならない作業に比べれば、作業の手間も時間も格段に少なくてすむ。また、導線の延設にあたって高欄やトンネルの壁面に穿孔する必要がないので、その埋め戻し作業も不要となる。
【図面の簡単な説明】
【0012】
【図1】スリップフォーム成型機における測位装置の実施形態を示したモールド部分の斜視図。
【図2】図1のモールド部分を後方から見た図。
【図3】実施形態に係る測位装置の構造を概略的に説明した図。
【図4】実施形態に係る測位装置の回路図。
【図5】アスファルトフィニッシャの伸縮式スクリードにおける測位装置の実施形態を示した端部スクリード部分の斜視図。
【図6】図5の端部スクリード部分を後方から見た図。
【発明を実施するための形態】
【0013】
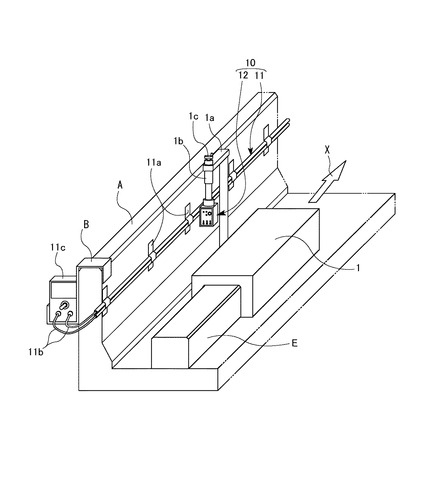
図1は、自走式施工機械の一例としてスリップフォーム成型機に測位装置を適用した実施形態を示す。ただし、スリップフォーム成型機に関しては、要部であるモールドの部分のみ図示してある。スリップフォーム成型機の図示せぬ部分は周知であり、ここでの詳しい説明は省く。
【0014】
図示のスリップフォーム成型機は、簡単に説明すると、クローラやタイヤ式の走行装置に搬送装置及び成型装置を組み付けた施工機械であり、そのうちの成型装置としてのモールド1が図示されている。モールド1は、一例として橋梁の路面端に縁石を施工するものであり、走行装置の左側に組み付けられる。このモールド1には、走行装置に組み付けられた搬送装置、例えばベルトコンベアにより、アジテータ車から施工材料としてコンクリートが供給される。モールド1は、締固め手段として油圧式バイブレータを内部に備え、該バイブレータの振動により、モールド1内でコンクリートの締固め、成型が行われ、コンクリート製の縁石Eが施工されていく。
【0015】
このようなスリップフォーム成型機においてモールド1の施工位置を測位する測位装置10が、モールド1の側方に設置されている。測位装置10は、基準電線11と、該基準電線11に給電することにより生じる磁界に基づいて測位を行う測位器12と、を含んで構成される。
【0016】
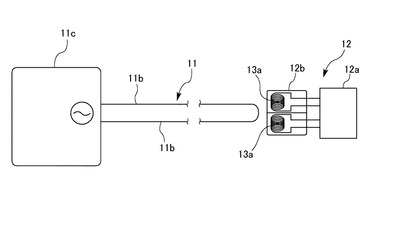
基準電線11は、モールド1の施工高さ(上下の位置)及び施工方向(左右の位置)の基準として、モールド1を移動させる方向(図中の矢示X)へ延設される。図1に示す場合は、施工面となる床版の側縁に沿って設けられている高欄Aの壁面に、粘着テープ11aによって貼り付けられ延設されている。施工高さ及び施工方向の基準となる基準電線11は、高欄Aの壁面に、測量してけがいた線の上をなぞるようにして延設することができる。本実施形態における基準電線11は、1本の導線11bを折り返したものを(図3参照)、互いに平行に樹脂被覆した2芯のフィーダ線である。したがって、施工部位において、当該フィーダ線における導線11bは、上下に並行して延設された2本の導線として機能する。導線11bの端部は、高欄AにフックBで設置した給電器11cに接続されている。給電器11cは、施工の邪魔にならないように、高欄Aの外側に設置する。
【0017】
給電器11cは、一例として周波数2kHzの交流電流を基準電線11に供給する。したがって、基準電線11において、給電器11cの交流電流によりその大きさと向きの変わる磁界が、上下に並行した導線11bの周りにそれぞれ発生する。2本の導線11bは、1本の導線を折曲げて形成してあるので、2本の導線11bから生じる磁界の強さは同レベルである。
【0018】
測位器12は、筐体12aの中に主回路を収めてあり、図2に示すように、この筐体12aにおいて基準電線11の側に、磁界検知部12bが突設されている。磁界検知部12bの中には、導線11bの磁界によって誘導電流を生じる磁界検知回路13が収納される。測位器12のモールド1への取り付けには、モールド1の側部に固定されて上方へ延伸する鉤形の支柱1aが利用され、この支柱1aから下方へ垂下された伸縮支持具1bの下端に、測位器12が固定される。伸縮支持具1bの上端には、該伸縮支持具1bを伸縮させるハンドル1cがあり、このハンドル1cを回転させて測位器12を上下させ、高さを微調整できるようになっている。基準電線11に対する初期の位置出しなどの微調整は、このハンドル1cにより行うことができる。また、鉤形の支柱1a自身も軸周りに回転可能にしてあり、鉤形の先端部分が水平方向に揺動することで、測位器12の左右方向の位置も、微調整できるようになっている。
【0019】
測位器12は、上記のようにしてモールド1に取り付けられているので、高欄Aの壁面に延設した基準電線11に近接して移動する。そして、測位器12がモールド1と共に移動しつつ、2本の導線11bを流れる電流により生じる磁界に応じて、磁界検知回路13に誘導電流が発生する。その誘導電流を生じる仕組みについて、図3に概略を示している。
【0020】
磁界検知部12bの中には、磁界検知回路13のコイル13aが配置される。コイル13aは、基準電線11の互いに並行する上下2本の導線11bに対応させて上下に2個、配置される。2本の導線11bは1本の導線を折り返して形成されているので、交流電流を流した場合、互いに逆向きの磁界を生じる。そして、2個のコイル13aは互いに逆巻きにしてあり、それぞれが、上下2本の導線11bの一方に生じる磁界の変化に主に応じて誘導電流を発生する。なお、コイルではなくホール素子等を使って磁界を検出するものもあり得るが、コイルの電磁誘導を利用する方が精度が高く且つ安価にすませられる。
【0021】
2個のコイル13aにそれぞれ生じる第1の誘導電流と第2の誘導電流は、筐体12aに収容された測位用の電気回路に入力され、上下位置及び左右位置の測位に利用される。測位用電気回路の詳細を、図4に示してある。
【0022】
磁界検知回路13において、上下の導線11bからそれぞれ生じる磁界によって、対応するコイル13aに誘導電流が生じ、各コイル13aに対応するアンプ13bによりその誘導電流を増幅して、第1及び第2の誘導電流I1,I2が出力される。磁界検知回路13から出力される誘導電流I1,I2は上下方向測位回路14に入力され、この上下方向測位回路14が、誘導電流I1,I2に基づいてモールド1の上下位置を測位する。上下方向測位回路14は、第1の誘導電流I1と第2の誘導電流I2とを比較し、両者の大きさ(振幅)が釣り合っているか否かを判断することにより測位を行う。
【0023】
すなわち、2本の導線11bは1本の導線を折り返したものなので、両者に生じる磁界はほぼ同じ強さをもつ。したがって、2個のコイル13aの間の上下中央と2本の導線11bの間の上下中央とがほぼ一致していれば、2個のコイル13aによる誘導電流I1,I2の大きさは釣り合う(差分=0)。一方、床版面の凹凸等によってモールド1の施工高さが変化する場合、基準電線11に対する測位器12の上下位置が変動するので、2個のコイル13aの間の上下中央と2本の導線11bの間の上下中央とにずれが生じる。すると、2個のコイル13aの誘導電流I1,I2の大きさに変化が生じ、釣り合わなくなる(差分が生じる)。例えば、施工高さが高くなって、基準電線11に対し測位器12が上にずれた場合、上側のコイル13aが上側の導線11bから離れるので第1の誘導電流I1が弱くなる一方、下側のコイル13aは、それまでなかった上側の導線11bによる磁界の影響も受けることになるので、該下側のコイル13aによる誘導電流I2はそれまでと違う波形となり、大きさが変化する。
【0024】
上下方向測位回路14は、このような第1の誘導電流I1及び第2の誘導電流I2の変化に基づいて、すなわち、2本の導線11bからそれぞれ生じる磁界によって2個のコイル13aに発生する誘導電流I1,I2の大きさを比較することにより、その差分から、基準電線11に対する測位器12の上下位置を測位する。例えば、差分「I1−I2」を算出すれば、I1−I2=0のときは上下位置が正確、I1−I2の結果が正(+)の値になれば下にずれ、負(−)の値になれば上にずれている、という判断を行うことができる。測位結果の信号は、上下方向測位回路14からスリップフォーム成型機の施工高さ制御機構へ送られ、2本の導線11bと2個のコイル13aとが一致するように、モールド1の施工高さ制御が実行される。このようにして、測位器12が基準電線11を一定の上下位置でトレースするように制御することによって、施工高さが極力一定になるように、モールド1が制御される。
【0025】
なお、このように測位器12が基準電線11を一定の上下位置でトレースするように施工機械を姿勢制御するだけでなく、基準電線11による磁界の強さを基にして、作為的に、例えば施工した縁石の表面が波打って仕上がるように、わざと測位器12を上下にずらすような制御とすることも可能である。
【0026】
磁界検知回路13から出力される誘導電流I1,I2は、左右方向測位回路15における左右位置の測位にも使用される。すなわち、左右方向測位回路15は、誘導電流I1,I2を直流変換して得られる直流電圧に基づいて、モールド1の左右位置を測位する。特に、本実施形態の左右方向測位回路15は、誘導電流I1,I2を直流変換すると共に両者を合成して得られる合成直流電圧Vdcに基づいて測位を行う。上述のように、誘導電流I1,I2の個々の値は測位器12の上下の位置ずれに従って変化してしまうが、これらの合成値をとってみると、上下位置が変わってもほぼ一定であり、基準電線11に対する測位器12の間隔Dが変わる(つまり左右方向にずれる)と変化する。そこで、測位器12の上下方向の位置ずれに左右されることなくモールド1の左右位置を測位するために、左右方向測位回路15では合成直流電圧を使用する。
【0027】
このために左右方向測位回路15は、合成回路16と、リニアアナライザ回路17と、比較回路18とを備えている。合成回路16は、第1の誘導電流I1及び第2の誘導電流I2を直流変換してその直流電圧を合成し、そして、合成した電圧数の2で合成値を除算して平均化する。平均化することにより、ノイズの影響を抑えることができる。リニアアナライザ回路17は、線形性改善回路であり、合成回路16の出力の線形性を改善し、直線化して比較回路18へ出力する。比較回路18は、リニアアナライザ回路17から入力される電圧を基準電圧と比較し、該基準電圧に対する大小に従いモールド1の左右位置を測位する。測位結果の信号は、左右方向測位回路15からスリップフォーム成型機の施工方向を制御する操舵機構へ送られ、基準電線11と測位器12との間隔Dが一定となるように、モールド1の施工方向制御が実行される。このようにして、測位器12が一定の間隔Dで基準電線11をトレースするように制御することによって、縁石Eの施工位置が極力一定になるように、モールド1が制御される。
【0028】
比較回路18において比較に使用される基準電圧は、一定に維持する目標間隔Dを決定する要素である。したがって、比較回路18には、例えば可変抵抗を使用した可変基準電圧発生手段を設ける。ツマミ等によりその可変抵抗値を変更できるようにしてあれば、ツマミを回すことで基準電圧を変更し、目標間隔Dを適宜決定することができる。一例として、この基準電圧設定により、本実施形態の測位装置10は、30mm〜200mmの範囲で目標間隔Dを変えることが可能である。
【0029】
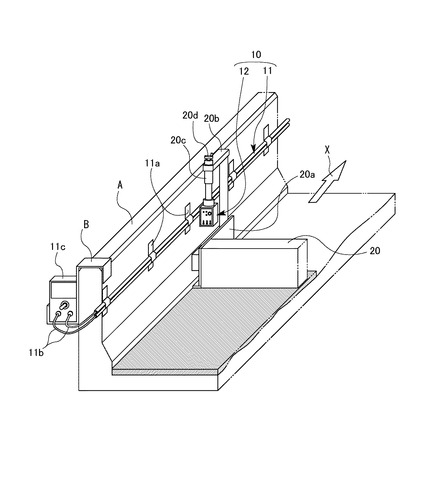
図5及び図6は、施工(舗設)材料としてのアスファルト混合物を敷均して締固めるアスファルトフィニッシャで使用されるスクリード装置に、測位装置10を適用した実施形態である。この場合の成型装置としてのスクリード装置は、例えば、施工幅に合わせて2つのスクリードが互いに伸縮する構造、又は、中央の固定スクリードに対して左右端部の補助スクリードが伸縮する構造のスクリード装置で、図5及び図6には、伸縮するスクリード20の左端部分が図示されている。なお、図5及び図6では、スクリード装置の左端部分のみを図示し、これ以外の部分は省略してある。スクリード装置は、走行車両の後方に、レベリングシリンダ及びレベリングアームを含んで構成された姿勢調整機構によって装備される。
【0030】
図5及び図6には、アスファルトフィニッシャを使用して、橋梁の床版上にアスファルト舗装を舗設する場合を示している。本実施形態に係る測位装置10は、上記図1及び図2に示す実施形態と同じもので、基準電線11と、スクリード20の側端に取り付けられた測位器12と、を含んで構成されている。
【0031】
基準電線11は、スクリード20の施工高さ及び施工幅(幅員)の基準として延設される。図1の場合と同じく、基準電線11は、施工面となる床版の側縁に沿って設けられている高欄Aの壁面に、測量してけがいた線の上をなぞるようにして粘着テープ11aによって貼り付けられる。図1の実施形態と同様の基準電線11は、施工部位において、上下に並行して延設された2本の導線11bとして機能する。導線11bには、高欄AにフックBで設置した給電器11cから、一例として周波数2kHzの交流電流が給電される。
【0032】
測位器12も、図1及び図2の実施形態と同じで、主回路を収めた筐体12aと、この筐体12aに突設された磁界検知部12bと、を備え、磁界検知部12bの中に磁界検知回路13が収納される。測位器12のスクリード20への取り付けは、スクリード20の側端にあるエンドプレート20aに固定されて上方へ延伸する鉤形の支柱20bが利用され、この支柱20bから下方へ垂下された伸縮支持具20cの下端に、測位器12が固定される。伸縮支持具20cの上端には、該伸縮支持具20cを伸縮させるハンドル20dがあり、このハンドル20dを回転させて測位器12を上下させ、高さを微調整することができる。基準電線11に対する初期の位置出しなどの微調整は、このハンドル20dにより行う。また、鉤形の支柱20b自身も軸周りに回転可能にしてあり、鉤形の先端部分が水平方向に揺動することで、測位器12の左右方向の位置も、微調整することができる。
【0033】
測位器12は、上記のようにしてスクリード20に取り付けられているので、施工時、高欄Aの壁面に延設した基準電線11に近接して移動する。そして、測位器12は、スクリード20と共に移動しつつ、2本の導線11bを流れる電流により生じる磁界に応じて、上述の仕組みに従い、スクリード20の上下位置及び左右位置を測位する。この測位結果に従って、スクリード20の施工高さ及び施工幅が適切に制御される。すなわち、上下方向の測位結果に従い姿勢調整機構が制御されてスクリード20が上下し、また、左右方向の測位結果に従い伸縮機構が制御されてスクリード20が伸縮する。
【0034】
以上、コンクリート構造物を施工するスリップフォーム成型機とアスファルト舗装を舗設するアスファルトフィニッシャを例にして測位装置を説明したが、測位装置は、これ以外の成型装置を備えた施工機械にも適用可能である。
【符号の説明】
【0035】
10 測位装置
11 基準電線
11b 導線
11c 給電器
12 測位器
12a 磁界検知部
13 磁界検知回路
13a コイル
14 上下方向測位回路
15 左右方向測位回路
16 合成回路
17 リニアアナライザ回路
18 比較回路
【技術分野】
【0001】
舗装又は道路構造物などを施工するための装置に関する技術が以下に開示される。
【背景技術】
【0002】
例えば、道路舗装を舗設する場合や道路端の縁石などのコンクリート構造物を施工する場合、スリップフォーム成型機と呼ばれる施工機械を使用したスリップフォーム工法が用いられる。一例としてコンクリート構造物を施工するスリップフォーム工法は、スリップフォーム成型機の有するモールド内に施工材料としてコンクリートを投入し、該モールド内部で締固め及び成型を行いつつスリップフォーム成型機を前進させることにより、コンクリート構造物を連続して施工していく工法である(非特許文献1)。
【0003】
構造物施工用のスリップフォーム成型機は、クローラやタイヤ式の走行装置に、施工材料を運搬車から供給するベルトコンベア等の搬送装置と、搬送装置により供給される施工材料を成型するための成型装置と、を組み付けた自走式の施工機械である。その成型装置として、モールド及びモールド内の締固め手段を備え、締固め手段には油圧や電動式バイブレータが主に使用される。当該成型装置は、締固め手段の振動により、モールド内でコンクリートの締固め、成型を行う。
【0004】
施工時のスリップフォーム成型機は、センサ制御に従って、成型装置であるモールドの施工高さ及び施工方向を制御する。すなわち、施工高さ及び施工方向の基準線となるセンサロープが施工現場に張設され、鉤形等の高さ制御用センサがセンサロープ上を這うことでモールドの上下方向の施工位置が測位される一方、垂下する棒状の方向制御用センサがセンサロープ横に接触することでモールドの左右方向の施工位置が測位される。そして、その測位結果に従って、モールドの施工高さが制御されると共に走行装置の操舵によりモールドの施工方向が制御される(特許文献1、非特許文献1参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2000−290922号公報
【非特許文献】
【0006】
【非特許文献1】「スリップフォーム工法施工マニュアル(構造物編)」,平成20年3月,日本スリップフォーム工法協会(http://www.nsfa.jp/kyokai/manual.htmlからダウンロード可)
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記のように、スリップフォーム成型機等の施工機械による施工時には、センサロープを基準線として成型装置の施工位置が測位されるので、このセンサロープのたるみが大きいと測位の基準が狂う。したがって、センサロープは、高張力で真っ直ぐに張設する必要があるが、まったくたるみの無い状態に緊張させるのは難しい。現状では、なるべくたるみを少なくするため、数十センチから数メートル程度の定間隔でセンサピン、クランプ、ロッドを設置し、これによりセンサロープを張設している。この張設作業の手間が、人手を要したり、施工時間が長くなる原因の一つとなっている。
【0008】
また、橋梁やトンネル内の縁石施工などの場合、縁石の外側に余裕が無いので、高欄やトンネルの壁面に穿孔して専用ステイを設置し、該ステイによりセンサロープを張設することが行われている。この場合、穿孔した壁面の孔を施工後に埋め戻す作業も必要となるので、さらに不利益を被る。
【0009】
以上の背景に鑑みると、センサロープを張設する必要のない測位装置が望まれる。
【課題を解決するための手段】
【0010】
上記課題に対して提案する測位装置は、施工材料を成型するための成型装置を走行装置に組み付けた自走式の施工機械において前記成型装置の施工位置を測位する測位装置であって、
施工高さ及び施工方向の基準として、上下に並行して延設された2本の導線と、
給電により前記2本の導線からそれぞれ生じる磁界によって、第1及び第2の誘導電流を発生する磁界検知回路と、
前記第1及び第2の誘導電流に基づいて上下位置を測位する上下方向測位回路と、
前記第1及び第2の誘導電流に係る電圧に基づいて左右位置を測位する左右方向測位回路と、
を含んで構成される。
【発明の効果】
【0011】
上記提案の測位装置は、施工高さ及び施工方向の基準として導線を使用し、該導線に生じる磁界によって、非接触で施工位置を測位する。橋梁やトンネル内での施工を例にすれば、導線の延設作業は、高欄やトンネルの壁面に施工高さの線をけがき、このけがき線に沿って、接着剤や粘着テープ等により導線を貼り付けるという簡単な作業でよい。すなわち、センサロープ等の張設は不要である。
したがって、従来技術のように、高さを測量しながら一定間隔でクランプを設置して緊張させつつセンサロープを張設しなければならない作業に比べれば、作業の手間も時間も格段に少なくてすむ。また、導線の延設にあたって高欄やトンネルの壁面に穿孔する必要がないので、その埋め戻し作業も不要となる。
【図面の簡単な説明】
【0012】
【図1】スリップフォーム成型機における測位装置の実施形態を示したモールド部分の斜視図。
【図2】図1のモールド部分を後方から見た図。
【図3】実施形態に係る測位装置の構造を概略的に説明した図。
【図4】実施形態に係る測位装置の回路図。
【図5】アスファルトフィニッシャの伸縮式スクリードにおける測位装置の実施形態を示した端部スクリード部分の斜視図。
【図6】図5の端部スクリード部分を後方から見た図。
【発明を実施するための形態】
【0013】
図1は、自走式施工機械の一例としてスリップフォーム成型機に測位装置を適用した実施形態を示す。ただし、スリップフォーム成型機に関しては、要部であるモールドの部分のみ図示してある。スリップフォーム成型機の図示せぬ部分は周知であり、ここでの詳しい説明は省く。
【0014】
図示のスリップフォーム成型機は、簡単に説明すると、クローラやタイヤ式の走行装置に搬送装置及び成型装置を組み付けた施工機械であり、そのうちの成型装置としてのモールド1が図示されている。モールド1は、一例として橋梁の路面端に縁石を施工するものであり、走行装置の左側に組み付けられる。このモールド1には、走行装置に組み付けられた搬送装置、例えばベルトコンベアにより、アジテータ車から施工材料としてコンクリートが供給される。モールド1は、締固め手段として油圧式バイブレータを内部に備え、該バイブレータの振動により、モールド1内でコンクリートの締固め、成型が行われ、コンクリート製の縁石Eが施工されていく。
【0015】
このようなスリップフォーム成型機においてモールド1の施工位置を測位する測位装置10が、モールド1の側方に設置されている。測位装置10は、基準電線11と、該基準電線11に給電することにより生じる磁界に基づいて測位を行う測位器12と、を含んで構成される。
【0016】
基準電線11は、モールド1の施工高さ(上下の位置)及び施工方向(左右の位置)の基準として、モールド1を移動させる方向(図中の矢示X)へ延設される。図1に示す場合は、施工面となる床版の側縁に沿って設けられている高欄Aの壁面に、粘着テープ11aによって貼り付けられ延設されている。施工高さ及び施工方向の基準となる基準電線11は、高欄Aの壁面に、測量してけがいた線の上をなぞるようにして延設することができる。本実施形態における基準電線11は、1本の導線11bを折り返したものを(図3参照)、互いに平行に樹脂被覆した2芯のフィーダ線である。したがって、施工部位において、当該フィーダ線における導線11bは、上下に並行して延設された2本の導線として機能する。導線11bの端部は、高欄AにフックBで設置した給電器11cに接続されている。給電器11cは、施工の邪魔にならないように、高欄Aの外側に設置する。
【0017】
給電器11cは、一例として周波数2kHzの交流電流を基準電線11に供給する。したがって、基準電線11において、給電器11cの交流電流によりその大きさと向きの変わる磁界が、上下に並行した導線11bの周りにそれぞれ発生する。2本の導線11bは、1本の導線を折曲げて形成してあるので、2本の導線11bから生じる磁界の強さは同レベルである。
【0018】
測位器12は、筐体12aの中に主回路を収めてあり、図2に示すように、この筐体12aにおいて基準電線11の側に、磁界検知部12bが突設されている。磁界検知部12bの中には、導線11bの磁界によって誘導電流を生じる磁界検知回路13が収納される。測位器12のモールド1への取り付けには、モールド1の側部に固定されて上方へ延伸する鉤形の支柱1aが利用され、この支柱1aから下方へ垂下された伸縮支持具1bの下端に、測位器12が固定される。伸縮支持具1bの上端には、該伸縮支持具1bを伸縮させるハンドル1cがあり、このハンドル1cを回転させて測位器12を上下させ、高さを微調整できるようになっている。基準電線11に対する初期の位置出しなどの微調整は、このハンドル1cにより行うことができる。また、鉤形の支柱1a自身も軸周りに回転可能にしてあり、鉤形の先端部分が水平方向に揺動することで、測位器12の左右方向の位置も、微調整できるようになっている。
【0019】
測位器12は、上記のようにしてモールド1に取り付けられているので、高欄Aの壁面に延設した基準電線11に近接して移動する。そして、測位器12がモールド1と共に移動しつつ、2本の導線11bを流れる電流により生じる磁界に応じて、磁界検知回路13に誘導電流が発生する。その誘導電流を生じる仕組みについて、図3に概略を示している。
【0020】
磁界検知部12bの中には、磁界検知回路13のコイル13aが配置される。コイル13aは、基準電線11の互いに並行する上下2本の導線11bに対応させて上下に2個、配置される。2本の導線11bは1本の導線を折り返して形成されているので、交流電流を流した場合、互いに逆向きの磁界を生じる。そして、2個のコイル13aは互いに逆巻きにしてあり、それぞれが、上下2本の導線11bの一方に生じる磁界の変化に主に応じて誘導電流を発生する。なお、コイルではなくホール素子等を使って磁界を検出するものもあり得るが、コイルの電磁誘導を利用する方が精度が高く且つ安価にすませられる。
【0021】
2個のコイル13aにそれぞれ生じる第1の誘導電流と第2の誘導電流は、筐体12aに収容された測位用の電気回路に入力され、上下位置及び左右位置の測位に利用される。測位用電気回路の詳細を、図4に示してある。
【0022】
磁界検知回路13において、上下の導線11bからそれぞれ生じる磁界によって、対応するコイル13aに誘導電流が生じ、各コイル13aに対応するアンプ13bによりその誘導電流を増幅して、第1及び第2の誘導電流I1,I2が出力される。磁界検知回路13から出力される誘導電流I1,I2は上下方向測位回路14に入力され、この上下方向測位回路14が、誘導電流I1,I2に基づいてモールド1の上下位置を測位する。上下方向測位回路14は、第1の誘導電流I1と第2の誘導電流I2とを比較し、両者の大きさ(振幅)が釣り合っているか否かを判断することにより測位を行う。
【0023】
すなわち、2本の導線11bは1本の導線を折り返したものなので、両者に生じる磁界はほぼ同じ強さをもつ。したがって、2個のコイル13aの間の上下中央と2本の導線11bの間の上下中央とがほぼ一致していれば、2個のコイル13aによる誘導電流I1,I2の大きさは釣り合う(差分=0)。一方、床版面の凹凸等によってモールド1の施工高さが変化する場合、基準電線11に対する測位器12の上下位置が変動するので、2個のコイル13aの間の上下中央と2本の導線11bの間の上下中央とにずれが生じる。すると、2個のコイル13aの誘導電流I1,I2の大きさに変化が生じ、釣り合わなくなる(差分が生じる)。例えば、施工高さが高くなって、基準電線11に対し測位器12が上にずれた場合、上側のコイル13aが上側の導線11bから離れるので第1の誘導電流I1が弱くなる一方、下側のコイル13aは、それまでなかった上側の導線11bによる磁界の影響も受けることになるので、該下側のコイル13aによる誘導電流I2はそれまでと違う波形となり、大きさが変化する。
【0024】
上下方向測位回路14は、このような第1の誘導電流I1及び第2の誘導電流I2の変化に基づいて、すなわち、2本の導線11bからそれぞれ生じる磁界によって2個のコイル13aに発生する誘導電流I1,I2の大きさを比較することにより、その差分から、基準電線11に対する測位器12の上下位置を測位する。例えば、差分「I1−I2」を算出すれば、I1−I2=0のときは上下位置が正確、I1−I2の結果が正(+)の値になれば下にずれ、負(−)の値になれば上にずれている、という判断を行うことができる。測位結果の信号は、上下方向測位回路14からスリップフォーム成型機の施工高さ制御機構へ送られ、2本の導線11bと2個のコイル13aとが一致するように、モールド1の施工高さ制御が実行される。このようにして、測位器12が基準電線11を一定の上下位置でトレースするように制御することによって、施工高さが極力一定になるように、モールド1が制御される。
【0025】
なお、このように測位器12が基準電線11を一定の上下位置でトレースするように施工機械を姿勢制御するだけでなく、基準電線11による磁界の強さを基にして、作為的に、例えば施工した縁石の表面が波打って仕上がるように、わざと測位器12を上下にずらすような制御とすることも可能である。
【0026】
磁界検知回路13から出力される誘導電流I1,I2は、左右方向測位回路15における左右位置の測位にも使用される。すなわち、左右方向測位回路15は、誘導電流I1,I2を直流変換して得られる直流電圧に基づいて、モールド1の左右位置を測位する。特に、本実施形態の左右方向測位回路15は、誘導電流I1,I2を直流変換すると共に両者を合成して得られる合成直流電圧Vdcに基づいて測位を行う。上述のように、誘導電流I1,I2の個々の値は測位器12の上下の位置ずれに従って変化してしまうが、これらの合成値をとってみると、上下位置が変わってもほぼ一定であり、基準電線11に対する測位器12の間隔Dが変わる(つまり左右方向にずれる)と変化する。そこで、測位器12の上下方向の位置ずれに左右されることなくモールド1の左右位置を測位するために、左右方向測位回路15では合成直流電圧を使用する。
【0027】
このために左右方向測位回路15は、合成回路16と、リニアアナライザ回路17と、比較回路18とを備えている。合成回路16は、第1の誘導電流I1及び第2の誘導電流I2を直流変換してその直流電圧を合成し、そして、合成した電圧数の2で合成値を除算して平均化する。平均化することにより、ノイズの影響を抑えることができる。リニアアナライザ回路17は、線形性改善回路であり、合成回路16の出力の線形性を改善し、直線化して比較回路18へ出力する。比較回路18は、リニアアナライザ回路17から入力される電圧を基準電圧と比較し、該基準電圧に対する大小に従いモールド1の左右位置を測位する。測位結果の信号は、左右方向測位回路15からスリップフォーム成型機の施工方向を制御する操舵機構へ送られ、基準電線11と測位器12との間隔Dが一定となるように、モールド1の施工方向制御が実行される。このようにして、測位器12が一定の間隔Dで基準電線11をトレースするように制御することによって、縁石Eの施工位置が極力一定になるように、モールド1が制御される。
【0028】
比較回路18において比較に使用される基準電圧は、一定に維持する目標間隔Dを決定する要素である。したがって、比較回路18には、例えば可変抵抗を使用した可変基準電圧発生手段を設ける。ツマミ等によりその可変抵抗値を変更できるようにしてあれば、ツマミを回すことで基準電圧を変更し、目標間隔Dを適宜決定することができる。一例として、この基準電圧設定により、本実施形態の測位装置10は、30mm〜200mmの範囲で目標間隔Dを変えることが可能である。
【0029】
図5及び図6は、施工(舗設)材料としてのアスファルト混合物を敷均して締固めるアスファルトフィニッシャで使用されるスクリード装置に、測位装置10を適用した実施形態である。この場合の成型装置としてのスクリード装置は、例えば、施工幅に合わせて2つのスクリードが互いに伸縮する構造、又は、中央の固定スクリードに対して左右端部の補助スクリードが伸縮する構造のスクリード装置で、図5及び図6には、伸縮するスクリード20の左端部分が図示されている。なお、図5及び図6では、スクリード装置の左端部分のみを図示し、これ以外の部分は省略してある。スクリード装置は、走行車両の後方に、レベリングシリンダ及びレベリングアームを含んで構成された姿勢調整機構によって装備される。
【0030】
図5及び図6には、アスファルトフィニッシャを使用して、橋梁の床版上にアスファルト舗装を舗設する場合を示している。本実施形態に係る測位装置10は、上記図1及び図2に示す実施形態と同じもので、基準電線11と、スクリード20の側端に取り付けられた測位器12と、を含んで構成されている。
【0031】
基準電線11は、スクリード20の施工高さ及び施工幅(幅員)の基準として延設される。図1の場合と同じく、基準電線11は、施工面となる床版の側縁に沿って設けられている高欄Aの壁面に、測量してけがいた線の上をなぞるようにして粘着テープ11aによって貼り付けられる。図1の実施形態と同様の基準電線11は、施工部位において、上下に並行して延設された2本の導線11bとして機能する。導線11bには、高欄AにフックBで設置した給電器11cから、一例として周波数2kHzの交流電流が給電される。
【0032】
測位器12も、図1及び図2の実施形態と同じで、主回路を収めた筐体12aと、この筐体12aに突設された磁界検知部12bと、を備え、磁界検知部12bの中に磁界検知回路13が収納される。測位器12のスクリード20への取り付けは、スクリード20の側端にあるエンドプレート20aに固定されて上方へ延伸する鉤形の支柱20bが利用され、この支柱20bから下方へ垂下された伸縮支持具20cの下端に、測位器12が固定される。伸縮支持具20cの上端には、該伸縮支持具20cを伸縮させるハンドル20dがあり、このハンドル20dを回転させて測位器12を上下させ、高さを微調整することができる。基準電線11に対する初期の位置出しなどの微調整は、このハンドル20dにより行う。また、鉤形の支柱20b自身も軸周りに回転可能にしてあり、鉤形の先端部分が水平方向に揺動することで、測位器12の左右方向の位置も、微調整することができる。
【0033】
測位器12は、上記のようにしてスクリード20に取り付けられているので、施工時、高欄Aの壁面に延設した基準電線11に近接して移動する。そして、測位器12は、スクリード20と共に移動しつつ、2本の導線11bを流れる電流により生じる磁界に応じて、上述の仕組みに従い、スクリード20の上下位置及び左右位置を測位する。この測位結果に従って、スクリード20の施工高さ及び施工幅が適切に制御される。すなわち、上下方向の測位結果に従い姿勢調整機構が制御されてスクリード20が上下し、また、左右方向の測位結果に従い伸縮機構が制御されてスクリード20が伸縮する。
【0034】
以上、コンクリート構造物を施工するスリップフォーム成型機とアスファルト舗装を舗設するアスファルトフィニッシャを例にして測位装置を説明したが、測位装置は、これ以外の成型装置を備えた施工機械にも適用可能である。
【符号の説明】
【0035】
10 測位装置
11 基準電線
11b 導線
11c 給電器
12 測位器
12a 磁界検知部
13 磁界検知回路
13a コイル
14 上下方向測位回路
15 左右方向測位回路
16 合成回路
17 リニアアナライザ回路
18 比較回路
【特許請求の範囲】
【請求項1】
施工材料を成型するための成型装置を走行装置に組み付けた自走式の施工機械において前記成型装置の施工位置を測位する測位装置であって、
施工高さ及び施工方向の基準として、上下に並行して延設された2本の導線と、
給電により前記2本の導線からそれぞれ生じる磁界によって、第1及び第2の誘導電流を発生する磁界検知回路と、
前記第1及び第2の誘導電流に基づいて上下位置を測位する上下方向測位回路と、
前記第1及び第2の誘導電流に係る電圧に基づいて左右位置を測位する左右方向測位回路と、
を含んで構成される、測位装置。
【請求項2】
前記上下方向測位回路は、
前記第1の誘導電流と前記第2の誘導電流との差分に基づいて上下位置を測位する、
請求項1記載の測位装置。
【請求項3】
前記左右方向測位回路は、
前記第1及び第2の誘導電流を直流変換すると共に両者を合成して得られる合成直流電圧に基づいて左右位置を測位する、
請求項1又は請求項2記載の測位装置。
【請求項4】
前記左右方向測位回路は、
前記第1及び第2の誘導電流を直流変換すると共に両者を合成して平均化した合成直流電圧を出力する合成回路と、
該合成回路の出力を所定の基準電圧と比較することにより左右位置を測位する比較回路と、
を含んで構成される、請求項3記載の測位装置。
【請求項5】
前記左右方向測位回路は、
前記合成回路と前記比較回路との間に、前記合成回路の出力の線形性を改善して前記比較回路へ提供するリニアアナライザ回路をさらに含む、
請求項4記載の測位装置。
【請求項1】
施工材料を成型するための成型装置を走行装置に組み付けた自走式の施工機械において前記成型装置の施工位置を測位する測位装置であって、
施工高さ及び施工方向の基準として、上下に並行して延設された2本の導線と、
給電により前記2本の導線からそれぞれ生じる磁界によって、第1及び第2の誘導電流を発生する磁界検知回路と、
前記第1及び第2の誘導電流に基づいて上下位置を測位する上下方向測位回路と、
前記第1及び第2の誘導電流に係る電圧に基づいて左右位置を測位する左右方向測位回路と、
を含んで構成される、測位装置。
【請求項2】
前記上下方向測位回路は、
前記第1の誘導電流と前記第2の誘導電流との差分に基づいて上下位置を測位する、
請求項1記載の測位装置。
【請求項3】
前記左右方向測位回路は、
前記第1及び第2の誘導電流を直流変換すると共に両者を合成して得られる合成直流電圧に基づいて左右位置を測位する、
請求項1又は請求項2記載の測位装置。
【請求項4】
前記左右方向測位回路は、
前記第1及び第2の誘導電流を直流変換すると共に両者を合成して平均化した合成直流電圧を出力する合成回路と、
該合成回路の出力を所定の基準電圧と比較することにより左右位置を測位する比較回路と、
を含んで構成される、請求項3記載の測位装置。
【請求項5】
前記左右方向測位回路は、
前記合成回路と前記比較回路との間に、前記合成回路の出力の線形性を改善して前記比較回路へ提供するリニアアナライザ回路をさらに含む、
請求項4記載の測位装置。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2011−208967(P2011−208967A)
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願番号】特願2010−74393(P2010−74393)
【出願日】平成22年3月29日(2010.3.29)
【出願人】(590002482)株式会社NIPPO (130)
【Fターム(参考)】
【公開日】平成23年10月20日(2011.10.20)
【国際特許分類】
【出願日】平成22年3月29日(2010.3.29)
【出願人】(590002482)株式会社NIPPO (130)
【Fターム(参考)】
[ Back to top ]