
測位装置
【課題】比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供する。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
【解決手段】測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備え、カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化を検出する時計異常変化検出部43と、を備え、状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を修正する状態予測値修正部41bと、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、カルマンフィルタを用いた衛星航法システムの測位装置に関する。
【背景技術】
【0002】
GPSといった衛星航法システムにおける測位装置は、衛星の送信電波に付加されている情報から得られる電波の送信時刻(以下「衛星送信時刻」)、衛星位置、衛星速度、受信電波の搬送波の測定により得られる利用者位置変化、衛星位置変化、受信機発振器の周波数ずれに起因するドップラシフト等から、利用者位置、利用者速度及び受信機における衛星航法システム系の時刻(以下「受信機時刻」)を推定する装置である。
【0003】
この測位装置において、利用者位置、利用者速度及び受信機時刻の推定には、前回の状態から今回の状態への変化、及び今回状態と観測値の関係をモデル化し、そのモデル方程式をカルマンフィルタによって解く方法が一般的である。
【0004】
カルマンフィルタにおいては、利用者位置、利用者速度及び受信機時刻を状態変数とおき、1エポック前の状態変数値とその誤差の共分散行列から予測モデルを用いて現在の状態変数値及びその共分散行列を予測する処理と、現在の観測量と状態推定値の関係式を用いて予測した状態変数値及び共分散行列から現在の状態変数値及び共分散行列を推定する処理が行われる。なお、エポックは観測データの取得時を意味している。
【0005】
通常、カルマンフィルタを用いて利用者位置、利用者速度及び受信機時刻を推定する場合、状態変数ベクトルxは、[数1]で表すのが一般的である。
【0006】
【数1】

【0007】
ここで、pは利用者位置(3次元ベクトル)、Δtは受信機時計の時刻と衛星航法システムにおける時刻との差(以下「受信機時計オフセット」)、vは利用者速度(3次元ベクトル)、ΔTは受信機時計における単位時間当たりの受信機時計オフセットのずれ(以下「受信機時計ドリフト」)、上付の"T"は転置行列を示す。なお、利用者位置とは受信機を利用する利用者の位置をいい、利用者速度とは利用者の移動速度をいう。
【0008】
カルマンフィルタを用いた衛星航法システムの測位装置では、発振器を備えた受信機時計において、受信機時計ドリフトの1エポック当たりの変化量は、ガウス分布に従うと仮定することができ、その分散量は発振器の周波数安定度によって決まる。予測モデルに前記仮定を組み入れることで、受信機時計ドリフトの推定精度を向上させることが可能であり、周波数安定度の高い発振器を用いるほど推定精度は向上する。
【0009】
通常の安価な衛星航法システムの測位装置においては、発振器に温度補償型水晶発振器(以下「TCXO」)が用いられる。この発振器では、温度が安定している環境では周波数安定度は比較的高いが、その一方で、急激な温度変化が発生した場合や衝撃を受けた場合には、受信機時計ドリフトが大きく変化してしまう。このような状態下でも安定した測位を行うには、受信機時計ドリフトの1エポック当たりの変化量の大きさ(分散)を大きめに設定する必要があった。しかしながら、上記分散を大きめに設定すると、受信機時計ドリフトが安定した状況下において精度が悪化してしまうという問題があった。
【0010】
このような問題を解決する技術として、適応カルマンフィルタが用いられている(例えば、非特許文献1参照)。非特許文献1に示された適応カルマンフィルタは、観測雑音の分散に基づき与えられたシステム雑音モデルのパラメータが妥当かどうかを判断して妥当でなければ調整することができ、また、連続する数エポックにおいて平均化処理を行って状態推定の信頼性を高めることができるようになっている。
【先行技術文献】
【非特許文献】
【0011】
【非特許文献1】Y. Bar-Shalom, X. R. Li, and T. Kirubarajan, Estimation with Applications to Tracking and Navigation: Theory, Algorithms, and Software, Wiley, New York, 2001, pp. 424-425.
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、従来の適応カルマンフィルタでは、受信機時計ドリフトの変化が安定しているにもかかわらず、観測値に大きな観測誤差が含まれている場合に受信機時計ドリフトに大きな変化が発生していると誤判断する可能性があり、測位精度の劣化をもたらすという課題があった。また、従来の適応カルマンフィルタでは、状態推定の信頼性を高めるため平均化処理を行う構成となっているので、受信機時計ドリフトの変化をリアルタイムに検出できなくなり、測位精度が劣化するという課題があった。
【0013】
この発明は、上述した課題を解決するためのもので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
本発明の測位装置は、衛星航法システムにおいて衛星からの測位信号を受信する受信機の利用者の位置を測位する測位装置であって、前記利用者の位置を示す利用者位置と、前記利用者の移動速度を示す利用者速度と、前記受信機が有する受信機時計の時刻と前記衛星航法システムにおける時刻との差を示す受信機時計オフセットと、前記受信機時計における単位時間当たりの前記受信機時計オフセットのずれを示す受信機時計ドリフトとを状態変数として含む状態変数ベクトルに基づき、前記衛星航法システムに関する状態予測及び状態推定を行うカルマンフィルタと、前記衛星からの測位信号を受信して前記衛星の状態を示す観測データを取得する観測データ取得手段と、を備え、前記カルマンフィルタは、前記状態変数ベクトルの予測値及び予測誤差の共分散行列を算出する状態予測手段と、前記状態予測手段の算出結果及び前記観測データに基づいて前記状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新する状態推定更新手段と、前記状態予測手段が算出した状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、前記状態推定更新手段が算出した状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分を算出する差分算出手段と、前記差分が予め定められた閾値を超えたとき、前記予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する分散修正手段と、を備え、前記状態推定更新手段は、前記分散修正手段が前記受信機時計ドリフトの分散を修正したとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を修正された受信機時計ドリフトの分散に置き換えて前記状態変数ベクトルの推定値及び推定誤差の共分散行列を再計算するものである構成を有している。
【0015】
この構成により、本発明の測位装置は、受信機時計ドリフト予測値と受信機時計ドリフト推定値との差分が予め定められた閾値を超えたとき、予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正するので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる。
【0016】
また、本発明の測位装置は、衛星航法システムにおいて衛星からの測位信号を受信する受信機の利用者の位置を測位する測位装置であって、前記利用者の位置を示す利用者位置と、前記利用者の移動速度を示す利用者速度と、前記受信機が有する受信機時計の時刻と前記衛星航法システムにおける時刻との差を示す受信機時計オフセットと、前記受信機時計における単位時間当たりの前記受信機時計オフセットのずれを示す受信機時計ドリフトとを状態変数として含む第1の状態変数ベクトルに基づき、前記衛星航法システムに関する状態予測及び状態推定を行うカルマンフィルタと、前記衛星からの測位信号を受信して前記衛星の状態を示す観測データを取得する観測データ取得手段と、を備え、前記カルマンフィルタは、前記第1の状態変数ベクトルの予測値及び予測誤差の共分散行列を算出する状態予測手段と、前記状態予測手段の算出結果の内の前記利用者速度及び前記受信機時計ドリフトのみを状態変数として含む第2の状態変数ベクトルの予測値及び予測誤差の共分散行列と前記観測データとに基づいて前記第2の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出する状態推定手段と、前記状態予測手段が算出した前記第1の状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、前記状態推定手段が算出した前記第2の状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分を算出する差分算出手段と、前記差分が予め定められた閾値を超えたとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する分散修正手段と、前記分散修正手段が前記受信機時計ドリフトの分散を修正したとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を修正された受信機時計ドリフトの分散に置き換えて前記第1の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新するとともに、前記分散修正手段が前記受信機時計ドリフトの分散を修正しなかったとき、前記状態予測手段の算出結果及び前記観測データに基づいて前記第1の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新する状態推定更新手段と、を備えた構成を有している。
【0017】
この構成により、本発明の測位装置は、利用者速度及び受信機時計ドリフトのみを状態変数として含む第2の状態変数ベクトルの推定値及び推定誤差の共分散行列を状態推定手段が算出し、状態予測手段が算出した第1の状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、状態推定手段が算出した第2の状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分が予め定められた閾値を超えたとき、状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正するので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる。
【0018】
さらに、本発明の測位装置は、前記受信機時計が、前記衛星に搭載された時計が有する発振器よりも安定度が低い発振器を備え、前記分散修正手段が、前記受信機時計の発振器の周波数短期安定度により見積もられた値を前記閾値とするものである構成を有している。
【0019】
この構成により、本発明の測位装置は、温度補償型水晶発振器を代表とする安定度の低い発振器を用いても、高精度でリアルタイムに現在位置を測位することができ、製造コストの低減化を図ることができる。
【発明の効果】
【0020】
本発明は、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができるという効果を有する測位装置を提供することができるものである。
【図面の簡単な説明】
【0021】
【図1】本発明に係る測位信号受信機の第1実施形態におけるブロック構成図である。
【図2】本発明に係る測位装置の第1実施形態におけるブロック構成図である。
【図3】本発明に係る測位装置の第1実施形態におけるフローチャートである。
【図4】本発明に係る測位装置の第2実施形態におけるブロック構成図である。
【図5】本発明に係る測位装置の第2実施形態におけるフローチャートである。
【発明を実施するための形態】
【0022】
まず、本発明の実施形態を説明する前にカルマンフィルタ処理について説明する。
【0023】
(カルマンフィルタ処理)
前述の[数1]において、利用者位置p、利用者速度vは、ECEF座標系のx軸、y軸、z軸を用いると、それぞれ、利用者位置p=[px,py,pz]T、利用者速度v=[vx,vy,vz]Tと表される。したがって、[数1]に示した状態変数ベクトルxは8変数を含むものとなる。よって、その状態推定値^xの誤差の共分散行列は、[数2]で表される。なお、"^x"は、xの上部に推定値を示すハット(^)が付されたものを表すものとする。
【0024】
【数2】
【0025】
ここで、上式の行列内の各成分は[数3]で示される。但し、[数3]において、epは利用者位置pに関する誤差、eΔtは受信機時計オフセットΔtに関する誤差、evは利用者速度vに関する誤差、eΔTは受信機時計ドリフトΔTに関する誤差であり、E{}は期待値を意味する。
【0026】
【数3】
【0027】
(k−1)エポックの状態推定値からkエポックの状態を予測するモデル式(状態方程式)は、[数4]で表される。但し、ここで、eΔp(k)、eΔΔt(k)、eΔv(k)、eΔΔT(k)は、(k−1)エポックの状態推定値からkエポックでの状態を行列Aで予測した値と、実際の値との不確定性を表すシステム雑音ベクトルである。また、Iは単位行列である。
【0028】
【数4】
【0029】
カルマンフィルタによる予測処理は、[数5]で表される。但し、QΔp(k)、QΔv(k)はそれぞれeΔp(k)、eΔv(k)についての共分散行列であり、σΔΔt(k)2、σΔΔT(k)2はそれぞれeΔΔt(k)、eΔΔT(k)についての分散である。また、上付(−)は予測処理で得られた値であることを意味する。
【0030】
【数5】
【0031】
観測量と状態推定値の関係式(観測方程式)は、[数6]で表される。但し、各変数の上付のi(i=1、2、・・・n)は衛星の番号を示す。また、tsvは衛星の衛星送信時刻、tuserは受信機時刻、φdopplerはドップラ観測値、psat(tsv)は利用者位置pにおいて衛星送信時刻tsvの信号を取得したときの衛星位置、Ionは電離層遅延誤差、Trは対流圏遅延量、eρは擬似距離ρ(ρ=c(tsv−tuser))の観測誤差、edopplerはドップラ観測値の観測誤差である。
【0032】
【数6】
【0033】
カルマンフィルタによる推定処理は、[数7]で表される。但し、Kはカルマンゲイン、Pは推定誤差の共分散行列、Rは観測雑音ekの共分散行列である。
【0034】
【数7】
【0035】
[数7]において、デザイン行列Hは、hk(^xk−,0)をxkで微分したヤコビアン行列であり、[数8]で表される。
【0036】
【数8】
【0037】
ここで、cは光速である。また、hiAOAは衛星iから受信機への単位方向ベクトルであり、[数9]で表される。
【0038】
【数9】
【0039】
システムの状態を精確に推定するため、予測処理と推定処理のそれぞれに対して、システム特性に合致するようなシステム雑音の共分散行列QΔp(k)、QΔv(k)及び分散値σΔΔt(k)2、σΔΔT(k)2と、観測雑音の共分散行列Rkを与えることで、推定の精度を向上させることができる。
【0040】
(第1実施形態)
次に、本発明に係る測位装置の第1実施形態における構成について説明する。
【0041】
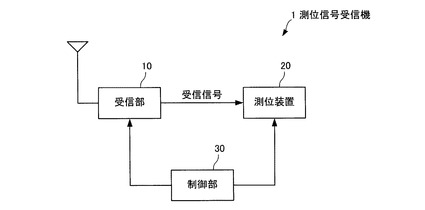
図1に示すように、本実施形態における測位信号受信機1は、受信部10、測位装置20、制御部30を備えている。この測位信号受信機1は、例えば、車両に搭載されるものである。
【0042】
受信部10は、所定の個数(例えば4個)のGPS衛星からの無線周波数(RF)帯の電波を受信するアンテナ、RF帯の信号を中間周波数帯の信号にダウンコンバートする変換回路等を備え、ダウンコンバートした受信信号を測位装置20に出力するようになっている。
【0043】
測位装置20は、例えばマイクロコンピュータで構成され、入力した受信信号を解析し、車両の現在位置(利用者位置)を測位するようになっている。
【0044】
制御部30は、例えばマイクロコンピュータで構成され、予めメモリに記憶されたプログラムに基づいて受信部10及び測位装置20の動作を制御するようになっている。
【0045】
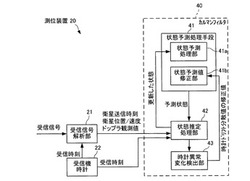
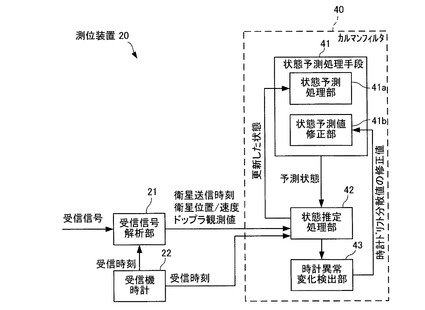
図2は、第1実施形態における測位装置20のブロック構成図である。図2に示すように、測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21及び状態推定処理部42(後述)に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備えている。本実施形態における受信機時計22は、発振器としてTCXOを備えたものであるが、これに限定されず、他の発振器を備えた構成としてもよい。なお、受信信号解析部21は、本発明に係る観測データ取得手段を構成する。
【0046】
カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化をリアルタイムに検出する時計異常変化検出部43と、を備えている。なお、時計異常変化検出部43は、本発明に係る差分算出手段を構成する。
【0047】
状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を動的に修正する状態予測値修正部41bと、を備えている。なお、状態予測処理部41a及び状態予測値修正部41bは、それぞれ、本発明に係る状態予測手段及び分散修正手段を構成する。
【0048】
状態推定処理部42は、衛星に関する観測データを受信信号解析部21から入力するとともに、状態予測処理手段41から現エポックでの状態変数ベクトル、予測誤差の共分散行列を入力し、状態変数ベクトルを更新して状態予測処理部41aに出力するようになっている。なお、状態推定処理部42は、本発明に係る状態推定更新手段を構成する。
【0049】
次に、本実施形態における測位装置20のカルマンフィルタ40の動作について説明する。
【0050】
受信信号解析部21は、入力した受信信号を解析し、各衛星の衛星送信時刻、衛星位置、衛星速度の情報を得る。また、受信信号解析部21は、受信した電波の搬送波に基づいてドップラ観測値を算出する。そして、受信信号解析部21は、算出した結果を状態推定処理部42に渡す。
【0051】
以下、カルマンフィルタ40の動作を図3に基づき説明する。
【0052】
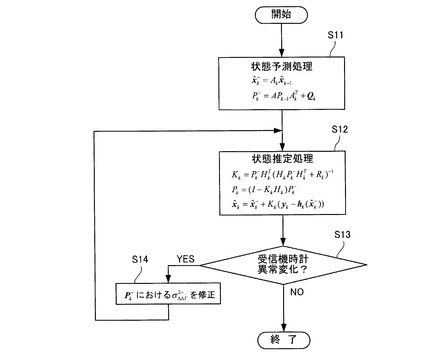
状態予測処理手段41の状態予測処理部41aは、状態推定処理部42から得る1エポック前(k−1)の利用者位置及び利用者速度、推定誤差の共分散行列から、現エポックの利用者位置及び利用者速度を予測し、予測誤差の共分散行列Pk−を[数5]を用いて算出する(ステップS11)。
【0053】
ここで、モデルにおける受信機時計ドリフトの変化量は、受信機時計ドリフトの安定時におけるTCXOの周波数短期安定度で見積もった値程度とする。なお、周波数短期安定度とは、比較的短い時間周期内におけるTCXOの出力周波数の揺らぎ(不規則変動)を表したものをいう。
【0054】
状態推定処理部42は、受信信号解析部21から衛星送信時刻、衛星位置、衛星速度、ドップラ観測値、受信時刻等の各データを入力する。また、状態推定処理部42は、状態予測処理手段41が予測した現エポックの状態変数ベクトルxk−、共分散行列Pk−のデータを入力する。そして、状態推定処理部42は、入力したこれらのデータを用いて、[数7]により、カルマンゲインを求め、状態変数ベクトル及び共分散行列を推定する(ステップS12)。但し、状態推定処理部42は、状態予測値修正部41bによる修正があった場合は、受信機時計ドリフトの分散値が修正された共分散行列Pk−のデータを状態予測値修正部41bから入力する。
【0055】
時計異常変化検出部43は、状態推定処理部42が推定した状態変数ベクトル^xkに含まれる受信機時計ドリフトΔ^Tkと、状態予測処理部41aが予測した状態変数ベクトル^xk−に含まれる受信機時計ドリフトΔ^Tk−とを状態推定処理部42から入力する。また、時計異常変化検出部43は、両者の変化分の差(|Δ^Tk−Δ^Tk−|)を計算し、[数10]により、TCXOの周波数短期安定度により見積もった受信機時計ドリフトの標準偏差σΔΔTと比較することにより、受信機時計22に異常な変化があったか否かを判断する(ステップS13)。なお、αは、許容量範囲を決めるスレッショルド係数である。
【0056】
【数10】
【0057】
時計異常変化検出部43は、受信機時計ドリフトの変化分が数[10]を満たさない場合は、受信機時計22の異常変化が発生していると判断し、σΔT2−より大きい値σnewΔT2−を受信機時計ドリフトの分散の修正値として状態予測値修正部41bに出力する。なお、上記のα及びσnewΔT2−は、例えば実験やシミュレーション等の結果に基づいて予め定められるものである。
【0058】
一方、時計異常変化検出部43は、受信機時計ドリフトの変化分が数[10]を満たす場合は、受信機時計22の異常変化が発生していないと判断し、処理を終了する。
【0059】
状態予測値修正部41bは、時計異常変化検出部43から受信機時計ドリフトの分散の修正値σnewΔT2−を受け取る。そして、状態予測値修正部41bは、状態予測処理部41aから受け取った予測誤差の共分散行列Pk−における受信機時計ドリフトの分散σΔT(k)2−を、時計異常変化検出部43から受け取った受信機時計ドリフトの分散の修正値σnewΔT2−に置き換えることにより、予測誤差の共分散行列Pk−を修正する(ステップS14)。
【0060】
そして、ステップS12に進み、状態推定処理部42は、修正された予測誤差の共分散行列Pk−に基づいて推定処理を再度行う。
【0061】
以上のように、本実施形態における測位装置20によれば、受信機時計ドリフト予測値と受信機時計ドリフト推定値との差分が予め定められた閾値を超えたとき、予測誤差の共分散行列に含まれる受信機時計ドリフトの分散をより大きな値に動的に修正する構成としたので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる。
【0062】
(第2実施形態)
本発明に係る測位装置の第2実施形態について説明する。
【0063】
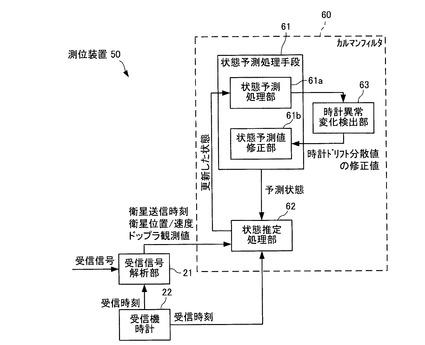
図4に示すように、本実施形態における測位装置50は、第1実施形態における測位装置20(図2参照)のカルマンフィルタ40をカルマンフィルタ60に変更したものである。したがって、カルマンフィルタ60に係る構成について説明し、第1実施形態の説明と重複する構成の説明は省略する。
【0064】
カルマンフィルタ60は、状態予測を行う状態予測処理手段61と、受信機時計22から受信時刻情報を取得するとともに状態推定を行う状態推定処理部62と、受信機時計22の異常変化を検出する時計異常変化検出部63と、を備えている。状態予測処理手段61は、状態を予測する状態予測処理部61aと、時計異常変化検出部63の検出結果に基づいて状態予測値を修正する状態予測値修正部61bと、を備えている。
【0065】
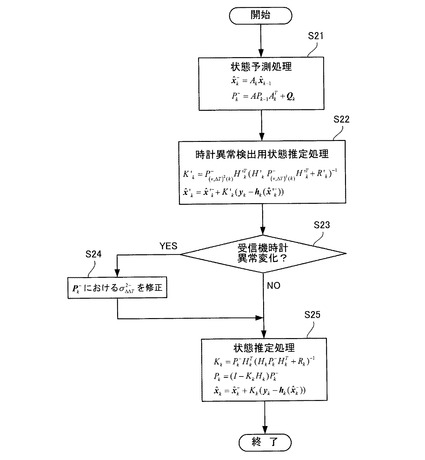
次に、本実施形態における測位装置50のカルマンフィルタ60の動作について図5に基づき説明する。
【0066】
状態予測処理部61aは、状態推定処理部62から得る1エポック前の利用者位置及び利用者速度、推定誤差の共分散行列から、現エポックの利用者位置及び利用者速度を予測し、予測誤差の共分散行列を、[数5]を用いて算出する(ステップS21)。ここで、モデルにおける受信機時計ドリフトの変動量は、受信機時計ドリフトの安定時におけるTCXOの周波数短期安定度で見積もった値程度とする。
【0067】
時計異常変化検出部63は、状態予測処理部61aから、予測された状態変数ベクトルxk―1に含まれる状態変数の内、利用者速度及び受信機時計ドリフト(vx、vy、vz、ΔT)と、予測誤差の共分散行列Pk―1−の部分行列である利用者速度、受信機時計ドリフトの状態変数ベクトルに関する共分散行列を受け取る。この共分散行列を[数11]に示す。
【0068】
【数11】
【0069】
また、時計異常変化検出部63は、状態変数ベクトルを[数12]とおき、観測方程式を[数13]とおいて[数14]により、時計異常検出用の状態推定処理を状態推定処理部62に行わせる(ステップS22)。この場合、状態推定処理部62は、本発明に係る状態推定手段を構成する。
【0070】
【数12】
【0071】
【数13】
【0072】
【数14】
【0073】
時計異常変化検出部63は、ステップS22において推定した受信機時計ドリフトΔ^Tkと、状態予測処理部61aが予測した受信機時計ドリフトΔ^Tk−とに基づき、両者の変化分の差(|Δ^Tk−Δ^Tk−|)を計算し、[数15]により、TCXOの周波数短期安定度により見積もった受信機時計ドリフトの標準偏差σΔΔTと比較することにより、受信機時計22に異常な変化があったか否かを判断する(ステップS23)。
【0074】
【数15】
【0075】
時計異常変化検出部63は、受信機時計ドリフトの変化分が[数15]を満たさない場合は、受信機時計22の異常変化が発生していると判断し、σΔT2−より大きい値σnewΔT2−を受信機時計ドリフトの分散の修正値として状態予測値修正部61bに出力する。
【0076】
状態予測値修正部61bは、状態予測処理部61aから受け取った予測誤差の共分散行列Pk−における受信機時計ドリフトの分散σΔT(k)2−を、時計異常変化検出部63から受け取った受信機時計ドリフトの分散の修正値σnewΔT2−に置き換えることにより、予測誤差の共分散行列Pk−を修正する(ステップS24)。
【0077】
一方、時計異常変化検出部63は、受信機時計ドリフトの変化分が[数15]を満たす場合は、受信機時計22の異常変化が発生していないと判断し、ステップS21で予測された値で状態推定処理部62に[数7]により状態推定を行わせる(ステップS25)。また、状態推定処理部62は、ステップS24において予測誤差の共分散行列Pk−が修正された場合は、修正された予測誤差の共分散行列Pk−による推定処理をステップS25において行う。この場合、状態推定処理部62は、本発明に係る状態推定更新手段を構成する。
【0078】
なお、前述の受信機時計ドリフトの分散の修正に代えて、例えば、[数11]においてσΔT2−の項目をσnewΔT2−に変更して予測誤差の共分散行列を[数16]とし、[数17]を満たすような値を割り出す手法を用いてもよい。この場合、σnewΔT2−がσnewΔΔT2を用いて[数18]により算出される。
【0079】
【数16】
【0080】
【数17】
【0081】
【数18】
【0082】
ここで、[数16]の右辺の行列においてPk−の部分行列である速度v、受信機時計ドリフトΔTの状態変数ベクトルに関する共分散行列について、kエポックでの予測値をそのまま用いるのではなく、必要に応じて変更してもかまわない。
【0083】
以上のように、本実施形態における測位装置50によれば、利用者速度及び受信機時計ドリフトのみを状態変数として含む状態変数ベクトルの推定値及び推定誤差の共分散行列を算出し、この算出した状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値と、状態予測処理手段61が算出した状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値との差分が予め定められた閾値を超えたとき、状態予測処理手段61が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する構成としたので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる。
【産業上の利用可能性】
【0084】
以上のように、本発明に係る測位装置は、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができるという効果を有し、カルマンフィルタを用いた衛星航法システムの測位装置等として有用である。
【符号の説明】
【0085】
10 受信部
20、50 測位装置
21 受信信号解析部(観測データ取得手段)
22 受信機時計
30 制御部
40、60 カルマンフィルタ
41、61 状態予測処理手段
41a、61a 状態予測処理部(状態予測手段)
41b、61b 状態予測値修正部(分散修正手段)
42 状態推定処理部(状態推定更新手段)
43、63 時計異常変化検出部(差分算出手段)
62 状態推定処理部(状態推定手段、状態推定更新手段)
【技術分野】
【0001】
本発明は、カルマンフィルタを用いた衛星航法システムの測位装置に関する。
【背景技術】
【0002】
GPSといった衛星航法システムにおける測位装置は、衛星の送信電波に付加されている情報から得られる電波の送信時刻(以下「衛星送信時刻」)、衛星位置、衛星速度、受信電波の搬送波の測定により得られる利用者位置変化、衛星位置変化、受信機発振器の周波数ずれに起因するドップラシフト等から、利用者位置、利用者速度及び受信機における衛星航法システム系の時刻(以下「受信機時刻」)を推定する装置である。
【0003】
この測位装置において、利用者位置、利用者速度及び受信機時刻の推定には、前回の状態から今回の状態への変化、及び今回状態と観測値の関係をモデル化し、そのモデル方程式をカルマンフィルタによって解く方法が一般的である。
【0004】
カルマンフィルタにおいては、利用者位置、利用者速度及び受信機時刻を状態変数とおき、1エポック前の状態変数値とその誤差の共分散行列から予測モデルを用いて現在の状態変数値及びその共分散行列を予測する処理と、現在の観測量と状態推定値の関係式を用いて予測した状態変数値及び共分散行列から現在の状態変数値及び共分散行列を推定する処理が行われる。なお、エポックは観測データの取得時を意味している。
【0005】
通常、カルマンフィルタを用いて利用者位置、利用者速度及び受信機時刻を推定する場合、状態変数ベクトルxは、[数1]で表すのが一般的である。
【0006】
【数1】
【0007】
ここで、pは利用者位置(3次元ベクトル)、Δtは受信機時計の時刻と衛星航法システムにおける時刻との差(以下「受信機時計オフセット」)、vは利用者速度(3次元ベクトル)、ΔTは受信機時計における単位時間当たりの受信機時計オフセットのずれ(以下「受信機時計ドリフト」)、上付の"T"は転置行列を示す。なお、利用者位置とは受信機を利用する利用者の位置をいい、利用者速度とは利用者の移動速度をいう。
【0008】
カルマンフィルタを用いた衛星航法システムの測位装置では、発振器を備えた受信機時計において、受信機時計ドリフトの1エポック当たりの変化量は、ガウス分布に従うと仮定することができ、その分散量は発振器の周波数安定度によって決まる。予測モデルに前記仮定を組み入れることで、受信機時計ドリフトの推定精度を向上させることが可能であり、周波数安定度の高い発振器を用いるほど推定精度は向上する。
【0009】
通常の安価な衛星航法システムの測位装置においては、発振器に温度補償型水晶発振器(以下「TCXO」)が用いられる。この発振器では、温度が安定している環境では周波数安定度は比較的高いが、その一方で、急激な温度変化が発生した場合や衝撃を受けた場合には、受信機時計ドリフトが大きく変化してしまう。このような状態下でも安定した測位を行うには、受信機時計ドリフトの1エポック当たりの変化量の大きさ(分散)を大きめに設定する必要があった。しかしながら、上記分散を大きめに設定すると、受信機時計ドリフトが安定した状況下において精度が悪化してしまうという問題があった。
【0010】
このような問題を解決する技術として、適応カルマンフィルタが用いられている(例えば、非特許文献1参照)。非特許文献1に示された適応カルマンフィルタは、観測雑音の分散に基づき与えられたシステム雑音モデルのパラメータが妥当かどうかを判断して妥当でなければ調整することができ、また、連続する数エポックにおいて平均化処理を行って状態推定の信頼性を高めることができるようになっている。
【先行技術文献】
【非特許文献】
【0011】
【非特許文献1】Y. Bar-Shalom, X. R. Li, and T. Kirubarajan, Estimation with Applications to Tracking and Navigation: Theory, Algorithms, and Software, Wiley, New York, 2001, pp. 424-425.
【発明の概要】
【発明が解決しようとする課題】
【0012】
しかしながら、従来の適応カルマンフィルタでは、受信機時計ドリフトの変化が安定しているにもかかわらず、観測値に大きな観測誤差が含まれている場合に受信機時計ドリフトに大きな変化が発生していると誤判断する可能性があり、測位精度の劣化をもたらすという課題があった。また、従来の適応カルマンフィルタでは、状態推定の信頼性を高めるため平均化処理を行う構成となっているので、受信機時計ドリフトの変化をリアルタイムに検出できなくなり、測位精度が劣化するという課題があった。
【0013】
この発明は、上述した課題を解決するためのもので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる測位装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
本発明の測位装置は、衛星航法システムにおいて衛星からの測位信号を受信する受信機の利用者の位置を測位する測位装置であって、前記利用者の位置を示す利用者位置と、前記利用者の移動速度を示す利用者速度と、前記受信機が有する受信機時計の時刻と前記衛星航法システムにおける時刻との差を示す受信機時計オフセットと、前記受信機時計における単位時間当たりの前記受信機時計オフセットのずれを示す受信機時計ドリフトとを状態変数として含む状態変数ベクトルに基づき、前記衛星航法システムに関する状態予測及び状態推定を行うカルマンフィルタと、前記衛星からの測位信号を受信して前記衛星の状態を示す観測データを取得する観測データ取得手段と、を備え、前記カルマンフィルタは、前記状態変数ベクトルの予測値及び予測誤差の共分散行列を算出する状態予測手段と、前記状態予測手段の算出結果及び前記観測データに基づいて前記状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新する状態推定更新手段と、前記状態予測手段が算出した状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、前記状態推定更新手段が算出した状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分を算出する差分算出手段と、前記差分が予め定められた閾値を超えたとき、前記予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する分散修正手段と、を備え、前記状態推定更新手段は、前記分散修正手段が前記受信機時計ドリフトの分散を修正したとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を修正された受信機時計ドリフトの分散に置き換えて前記状態変数ベクトルの推定値及び推定誤差の共分散行列を再計算するものである構成を有している。
【0015】
この構成により、本発明の測位装置は、受信機時計ドリフト予測値と受信機時計ドリフト推定値との差分が予め定められた閾値を超えたとき、予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正するので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる。
【0016】
また、本発明の測位装置は、衛星航法システムにおいて衛星からの測位信号を受信する受信機の利用者の位置を測位する測位装置であって、前記利用者の位置を示す利用者位置と、前記利用者の移動速度を示す利用者速度と、前記受信機が有する受信機時計の時刻と前記衛星航法システムにおける時刻との差を示す受信機時計オフセットと、前記受信機時計における単位時間当たりの前記受信機時計オフセットのずれを示す受信機時計ドリフトとを状態変数として含む第1の状態変数ベクトルに基づき、前記衛星航法システムに関する状態予測及び状態推定を行うカルマンフィルタと、前記衛星からの測位信号を受信して前記衛星の状態を示す観測データを取得する観測データ取得手段と、を備え、前記カルマンフィルタは、前記第1の状態変数ベクトルの予測値及び予測誤差の共分散行列を算出する状態予測手段と、前記状態予測手段の算出結果の内の前記利用者速度及び前記受信機時計ドリフトのみを状態変数として含む第2の状態変数ベクトルの予測値及び予測誤差の共分散行列と前記観測データとに基づいて前記第2の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出する状態推定手段と、前記状態予測手段が算出した前記第1の状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、前記状態推定手段が算出した前記第2の状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分を算出する差分算出手段と、前記差分が予め定められた閾値を超えたとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する分散修正手段と、前記分散修正手段が前記受信機時計ドリフトの分散を修正したとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を修正された受信機時計ドリフトの分散に置き換えて前記第1の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新するとともに、前記分散修正手段が前記受信機時計ドリフトの分散を修正しなかったとき、前記状態予測手段の算出結果及び前記観測データに基づいて前記第1の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新する状態推定更新手段と、を備えた構成を有している。
【0017】
この構成により、本発明の測位装置は、利用者速度及び受信機時計ドリフトのみを状態変数として含む第2の状態変数ベクトルの推定値及び推定誤差の共分散行列を状態推定手段が算出し、状態予測手段が算出した第1の状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、状態推定手段が算出した第2の状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分が予め定められた閾値を超えたとき、状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正するので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる。
【0018】
さらに、本発明の測位装置は、前記受信機時計が、前記衛星に搭載された時計が有する発振器よりも安定度が低い発振器を備え、前記分散修正手段が、前記受信機時計の発振器の周波数短期安定度により見積もられた値を前記閾値とするものである構成を有している。
【0019】
この構成により、本発明の測位装置は、温度補償型水晶発振器を代表とする安定度の低い発振器を用いても、高精度でリアルタイムに現在位置を測位することができ、製造コストの低減化を図ることができる。
【発明の効果】
【0020】
本発明は、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができるという効果を有する測位装置を提供することができるものである。
【図面の簡単な説明】
【0021】
【図1】本発明に係る測位信号受信機の第1実施形態におけるブロック構成図である。
【図2】本発明に係る測位装置の第1実施形態におけるブロック構成図である。
【図3】本発明に係る測位装置の第1実施形態におけるフローチャートである。
【図4】本発明に係る測位装置の第2実施形態におけるブロック構成図である。
【図5】本発明に係る測位装置の第2実施形態におけるフローチャートである。
【発明を実施するための形態】
【0022】
まず、本発明の実施形態を説明する前にカルマンフィルタ処理について説明する。
【0023】
(カルマンフィルタ処理)
前述の[数1]において、利用者位置p、利用者速度vは、ECEF座標系のx軸、y軸、z軸を用いると、それぞれ、利用者位置p=[px,py,pz]T、利用者速度v=[vx,vy,vz]Tと表される。したがって、[数1]に示した状態変数ベクトルxは8変数を含むものとなる。よって、その状態推定値^xの誤差の共分散行列は、[数2]で表される。なお、"^x"は、xの上部に推定値を示すハット(^)が付されたものを表すものとする。
【0024】
【数2】
【0025】
ここで、上式の行列内の各成分は[数3]で示される。但し、[数3]において、epは利用者位置pに関する誤差、eΔtは受信機時計オフセットΔtに関する誤差、evは利用者速度vに関する誤差、eΔTは受信機時計ドリフトΔTに関する誤差であり、E{}は期待値を意味する。
【0026】
【数3】
【0027】
(k−1)エポックの状態推定値からkエポックの状態を予測するモデル式(状態方程式)は、[数4]で表される。但し、ここで、eΔp(k)、eΔΔt(k)、eΔv(k)、eΔΔT(k)は、(k−1)エポックの状態推定値からkエポックでの状態を行列Aで予測した値と、実際の値との不確定性を表すシステム雑音ベクトルである。また、Iは単位行列である。
【0028】
【数4】
【0029】
カルマンフィルタによる予測処理は、[数5]で表される。但し、QΔp(k)、QΔv(k)はそれぞれeΔp(k)、eΔv(k)についての共分散行列であり、σΔΔt(k)2、σΔΔT(k)2はそれぞれeΔΔt(k)、eΔΔT(k)についての分散である。また、上付(−)は予測処理で得られた値であることを意味する。
【0030】
【数5】
【0031】
観測量と状態推定値の関係式(観測方程式)は、[数6]で表される。但し、各変数の上付のi(i=1、2、・・・n)は衛星の番号を示す。また、tsvは衛星の衛星送信時刻、tuserは受信機時刻、φdopplerはドップラ観測値、psat(tsv)は利用者位置pにおいて衛星送信時刻tsvの信号を取得したときの衛星位置、Ionは電離層遅延誤差、Trは対流圏遅延量、eρは擬似距離ρ(ρ=c(tsv−tuser))の観測誤差、edopplerはドップラ観測値の観測誤差である。
【0032】
【数6】
【0033】
カルマンフィルタによる推定処理は、[数7]で表される。但し、Kはカルマンゲイン、Pは推定誤差の共分散行列、Rは観測雑音ekの共分散行列である。
【0034】
【数7】
【0035】
[数7]において、デザイン行列Hは、hk(^xk−,0)をxkで微分したヤコビアン行列であり、[数8]で表される。
【0036】
【数8】
【0037】
ここで、cは光速である。また、hiAOAは衛星iから受信機への単位方向ベクトルであり、[数9]で表される。
【0038】
【数9】
【0039】
システムの状態を精確に推定するため、予測処理と推定処理のそれぞれに対して、システム特性に合致するようなシステム雑音の共分散行列QΔp(k)、QΔv(k)及び分散値σΔΔt(k)2、σΔΔT(k)2と、観測雑音の共分散行列Rkを与えることで、推定の精度を向上させることができる。
【0040】
(第1実施形態)
次に、本発明に係る測位装置の第1実施形態における構成について説明する。
【0041】
図1に示すように、本実施形態における測位信号受信機1は、受信部10、測位装置20、制御部30を備えている。この測位信号受信機1は、例えば、車両に搭載されるものである。
【0042】
受信部10は、所定の個数(例えば4個)のGPS衛星からの無線周波数(RF)帯の電波を受信するアンテナ、RF帯の信号を中間周波数帯の信号にダウンコンバートする変換回路等を備え、ダウンコンバートした受信信号を測位装置20に出力するようになっている。
【0043】
測位装置20は、例えばマイクロコンピュータで構成され、入力した受信信号を解析し、車両の現在位置(利用者位置)を測位するようになっている。
【0044】
制御部30は、例えばマイクロコンピュータで構成され、予めメモリに記憶されたプログラムに基づいて受信部10及び測位装置20の動作を制御するようになっている。
【0045】
図2は、第1実施形態における測位装置20のブロック構成図である。図2に示すように、測位装置20は、受信信号を解析する受信信号解析部21と、受信時刻情報を受信信号解析部21及び状態推定処理部42(後述)に提供する受信機時計22と、利用者位置、利用者速度及び受信機時刻を推定するカルマンフィルタ40と、を備えている。本実施形態における受信機時計22は、発振器としてTCXOを備えたものであるが、これに限定されず、他の発振器を備えた構成としてもよい。なお、受信信号解析部21は、本発明に係る観測データ取得手段を構成する。
【0046】
カルマンフィルタ40は、状態予測を行う状態予測処理手段41と、状態推定を行う状態推定処理部42と、受信機時計22の異常変化をリアルタイムに検出する時計異常変化検出部43と、を備えている。なお、時計異常変化検出部43は、本発明に係る差分算出手段を構成する。
【0047】
状態予測処理手段41は、状態推定処理部42から得る1エポック前の状態変数ベクトルに基づいて現エポックの状態変数ベクトルを予測する状態予測処理部41aと、時計異常変化検出部43の検出結果に基づいて状態予測値を動的に修正する状態予測値修正部41bと、を備えている。なお、状態予測処理部41a及び状態予測値修正部41bは、それぞれ、本発明に係る状態予測手段及び分散修正手段を構成する。
【0048】
状態推定処理部42は、衛星に関する観測データを受信信号解析部21から入力するとともに、状態予測処理手段41から現エポックでの状態変数ベクトル、予測誤差の共分散行列を入力し、状態変数ベクトルを更新して状態予測処理部41aに出力するようになっている。なお、状態推定処理部42は、本発明に係る状態推定更新手段を構成する。
【0049】
次に、本実施形態における測位装置20のカルマンフィルタ40の動作について説明する。
【0050】
受信信号解析部21は、入力した受信信号を解析し、各衛星の衛星送信時刻、衛星位置、衛星速度の情報を得る。また、受信信号解析部21は、受信した電波の搬送波に基づいてドップラ観測値を算出する。そして、受信信号解析部21は、算出した結果を状態推定処理部42に渡す。
【0051】
以下、カルマンフィルタ40の動作を図3に基づき説明する。
【0052】
状態予測処理手段41の状態予測処理部41aは、状態推定処理部42から得る1エポック前(k−1)の利用者位置及び利用者速度、推定誤差の共分散行列から、現エポックの利用者位置及び利用者速度を予測し、予測誤差の共分散行列Pk−を[数5]を用いて算出する(ステップS11)。
【0053】
ここで、モデルにおける受信機時計ドリフトの変化量は、受信機時計ドリフトの安定時におけるTCXOの周波数短期安定度で見積もった値程度とする。なお、周波数短期安定度とは、比較的短い時間周期内におけるTCXOの出力周波数の揺らぎ(不規則変動)を表したものをいう。
【0054】
状態推定処理部42は、受信信号解析部21から衛星送信時刻、衛星位置、衛星速度、ドップラ観測値、受信時刻等の各データを入力する。また、状態推定処理部42は、状態予測処理手段41が予測した現エポックの状態変数ベクトルxk−、共分散行列Pk−のデータを入力する。そして、状態推定処理部42は、入力したこれらのデータを用いて、[数7]により、カルマンゲインを求め、状態変数ベクトル及び共分散行列を推定する(ステップS12)。但し、状態推定処理部42は、状態予測値修正部41bによる修正があった場合は、受信機時計ドリフトの分散値が修正された共分散行列Pk−のデータを状態予測値修正部41bから入力する。
【0055】
時計異常変化検出部43は、状態推定処理部42が推定した状態変数ベクトル^xkに含まれる受信機時計ドリフトΔ^Tkと、状態予測処理部41aが予測した状態変数ベクトル^xk−に含まれる受信機時計ドリフトΔ^Tk−とを状態推定処理部42から入力する。また、時計異常変化検出部43は、両者の変化分の差(|Δ^Tk−Δ^Tk−|)を計算し、[数10]により、TCXOの周波数短期安定度により見積もった受信機時計ドリフトの標準偏差σΔΔTと比較することにより、受信機時計22に異常な変化があったか否かを判断する(ステップS13)。なお、αは、許容量範囲を決めるスレッショルド係数である。
【0056】
【数10】
【0057】
時計異常変化検出部43は、受信機時計ドリフトの変化分が数[10]を満たさない場合は、受信機時計22の異常変化が発生していると判断し、σΔT2−より大きい値σnewΔT2−を受信機時計ドリフトの分散の修正値として状態予測値修正部41bに出力する。なお、上記のα及びσnewΔT2−は、例えば実験やシミュレーション等の結果に基づいて予め定められるものである。
【0058】
一方、時計異常変化検出部43は、受信機時計ドリフトの変化分が数[10]を満たす場合は、受信機時計22の異常変化が発生していないと判断し、処理を終了する。
【0059】
状態予測値修正部41bは、時計異常変化検出部43から受信機時計ドリフトの分散の修正値σnewΔT2−を受け取る。そして、状態予測値修正部41bは、状態予測処理部41aから受け取った予測誤差の共分散行列Pk−における受信機時計ドリフトの分散σΔT(k)2−を、時計異常変化検出部43から受け取った受信機時計ドリフトの分散の修正値σnewΔT2−に置き換えることにより、予測誤差の共分散行列Pk−を修正する(ステップS14)。
【0060】
そして、ステップS12に進み、状態推定処理部42は、修正された予測誤差の共分散行列Pk−に基づいて推定処理を再度行う。
【0061】
以上のように、本実施形態における測位装置20によれば、受信機時計ドリフト予測値と受信機時計ドリフト推定値との差分が予め定められた閾値を超えたとき、予測誤差の共分散行列に含まれる受信機時計ドリフトの分散をより大きな値に動的に修正する構成としたので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる。
【0062】
(第2実施形態)
本発明に係る測位装置の第2実施形態について説明する。
【0063】
図4に示すように、本実施形態における測位装置50は、第1実施形態における測位装置20(図2参照)のカルマンフィルタ40をカルマンフィルタ60に変更したものである。したがって、カルマンフィルタ60に係る構成について説明し、第1実施形態の説明と重複する構成の説明は省略する。
【0064】
カルマンフィルタ60は、状態予測を行う状態予測処理手段61と、受信機時計22から受信時刻情報を取得するとともに状態推定を行う状態推定処理部62と、受信機時計22の異常変化を検出する時計異常変化検出部63と、を備えている。状態予測処理手段61は、状態を予測する状態予測処理部61aと、時計異常変化検出部63の検出結果に基づいて状態予測値を修正する状態予測値修正部61bと、を備えている。
【0065】
次に、本実施形態における測位装置50のカルマンフィルタ60の動作について図5に基づき説明する。
【0066】
状態予測処理部61aは、状態推定処理部62から得る1エポック前の利用者位置及び利用者速度、推定誤差の共分散行列から、現エポックの利用者位置及び利用者速度を予測し、予測誤差の共分散行列を、[数5]を用いて算出する(ステップS21)。ここで、モデルにおける受信機時計ドリフトの変動量は、受信機時計ドリフトの安定時におけるTCXOの周波数短期安定度で見積もった値程度とする。
【0067】
時計異常変化検出部63は、状態予測処理部61aから、予測された状態変数ベクトルxk―1に含まれる状態変数の内、利用者速度及び受信機時計ドリフト(vx、vy、vz、ΔT)と、予測誤差の共分散行列Pk―1−の部分行列である利用者速度、受信機時計ドリフトの状態変数ベクトルに関する共分散行列を受け取る。この共分散行列を[数11]に示す。
【0068】
【数11】
【0069】
また、時計異常変化検出部63は、状態変数ベクトルを[数12]とおき、観測方程式を[数13]とおいて[数14]により、時計異常検出用の状態推定処理を状態推定処理部62に行わせる(ステップS22)。この場合、状態推定処理部62は、本発明に係る状態推定手段を構成する。
【0070】
【数12】
【0071】
【数13】
【0072】
【数14】
【0073】
時計異常変化検出部63は、ステップS22において推定した受信機時計ドリフトΔ^Tkと、状態予測処理部61aが予測した受信機時計ドリフトΔ^Tk−とに基づき、両者の変化分の差(|Δ^Tk−Δ^Tk−|)を計算し、[数15]により、TCXOの周波数短期安定度により見積もった受信機時計ドリフトの標準偏差σΔΔTと比較することにより、受信機時計22に異常な変化があったか否かを判断する(ステップS23)。
【0074】
【数15】
【0075】
時計異常変化検出部63は、受信機時計ドリフトの変化分が[数15]を満たさない場合は、受信機時計22の異常変化が発生していると判断し、σΔT2−より大きい値σnewΔT2−を受信機時計ドリフトの分散の修正値として状態予測値修正部61bに出力する。
【0076】
状態予測値修正部61bは、状態予測処理部61aから受け取った予測誤差の共分散行列Pk−における受信機時計ドリフトの分散σΔT(k)2−を、時計異常変化検出部63から受け取った受信機時計ドリフトの分散の修正値σnewΔT2−に置き換えることにより、予測誤差の共分散行列Pk−を修正する(ステップS24)。
【0077】
一方、時計異常変化検出部63は、受信機時計ドリフトの変化分が[数15]を満たす場合は、受信機時計22の異常変化が発生していないと判断し、ステップS21で予測された値で状態推定処理部62に[数7]により状態推定を行わせる(ステップS25)。また、状態推定処理部62は、ステップS24において予測誤差の共分散行列Pk−が修正された場合は、修正された予測誤差の共分散行列Pk−による推定処理をステップS25において行う。この場合、状態推定処理部62は、本発明に係る状態推定更新手段を構成する。
【0078】
なお、前述の受信機時計ドリフトの分散の修正に代えて、例えば、[数11]においてσΔT2−の項目をσnewΔT2−に変更して予測誤差の共分散行列を[数16]とし、[数17]を満たすような値を割り出す手法を用いてもよい。この場合、σnewΔT2−がσnewΔΔT2を用いて[数18]により算出される。
【0079】
【数16】
【0080】
【数17】
【0081】
【数18】
【0082】
ここで、[数16]の右辺の行列においてPk−の部分行列である速度v、受信機時計ドリフトΔTの状態変数ベクトルに関する共分散行列について、kエポックでの予測値をそのまま用いるのではなく、必要に応じて変更してもかまわない。
【0083】
以上のように、本実施形態における測位装置50によれば、利用者速度及び受信機時計ドリフトのみを状態変数として含む状態変数ベクトルの推定値及び推定誤差の共分散行列を算出し、この算出した状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値と、状態予測処理手段61が算出した状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値との差分が予め定められた閾値を超えたとき、状態予測処理手段61が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する構成としたので、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができる。
【産業上の利用可能性】
【0084】
以上のように、本発明に係る測位装置は、比較的大きな受信機時計ドリフトが発生した場合でも高精度でリアルタイムに現在位置を測位することができるという効果を有し、カルマンフィルタを用いた衛星航法システムの測位装置等として有用である。
【符号の説明】
【0085】
10 受信部
20、50 測位装置
21 受信信号解析部(観測データ取得手段)
22 受信機時計
30 制御部
40、60 カルマンフィルタ
41、61 状態予測処理手段
41a、61a 状態予測処理部(状態予測手段)
41b、61b 状態予測値修正部(分散修正手段)
42 状態推定処理部(状態推定更新手段)
43、63 時計異常変化検出部(差分算出手段)
62 状態推定処理部(状態推定手段、状態推定更新手段)
【特許請求の範囲】
【請求項1】
衛星航法システムにおいて衛星からの測位信号を受信する受信機の利用者の位置を測位する測位装置であって、
前記利用者の位置を示す利用者位置と、前記利用者の移動速度を示す利用者速度と、前記受信機が有する受信機時計の時刻と前記衛星航法システムにおける時刻との差を示す受信機時計オフセットと、前記受信機時計における単位時間当たりの前記受信機時計オフセットのずれを示す受信機時計ドリフトとを状態変数として含む状態変数ベクトルに基づき、前記衛星航法システムに関する状態予測及び状態推定を行うカルマンフィルタと、
前記衛星からの測位信号を受信して前記衛星の状態を示す観測データを取得する観測データ取得手段と、を備え、
前記カルマンフィルタは、
前記状態変数ベクトルの予測値及び予測誤差の共分散行列を算出する状態予測手段と、
前記状態予測手段の算出結果及び前記観測データに基づいて前記状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新する状態推定更新手段と、
前記状態予測手段が算出した状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、前記状態推定更新手段が算出した状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分を算出する差分算出手段と、
前記差分が予め定められた閾値を超えたとき、前記予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する分散修正手段と、を備え、
前記状態推定更新手段は、前記分散修正手段が前記受信機時計ドリフトの分散を修正したとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を修正された受信機時計ドリフトの分散に置き換えて前記状態変数ベクトルの推定値及び推定誤差の共分散行列を再計算するものであることを特徴とする測位装置。
【請求項2】
衛星航法システムにおいて衛星からの測位信号を受信する受信機の利用者の位置を測位する測位装置であって、
前記利用者の位置を示す利用者位置と、前記利用者の移動速度を示す利用者速度と、前記受信機が有する受信機時計の時刻と前記衛星航法システムにおける時刻との差を示す受信機時計オフセットと、前記受信機時計における単位時間当たりの前記受信機時計オフセットのずれを示す受信機時計ドリフトとを状態変数として含む第1の状態変数ベクトルに基づき、前記衛星航法システムに関する状態予測及び状態推定を行うカルマンフィルタと、
前記衛星からの測位信号を受信して前記衛星の状態を示す観測データを取得する観測データ取得手段と、を備え、
前記カルマンフィルタは、
前記第1の状態変数ベクトルの予測値及び予測誤差の共分散行列を算出する状態予測手段と、
前記状態予測手段の算出結果の内の前記利用者速度及び前記受信機時計ドリフトのみを状態変数として含む第2の状態変数ベクトルの予測値及び予測誤差の共分散行列と前記観測データとに基づいて前記第2の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出する状態推定手段と、
前記状態予測手段が算出した前記第1の状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、前記状態推定手段が算出した前記第2の状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分を算出する差分算出手段と、
前記差分が予め定められた閾値を超えたとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する分散修正手段と、
前記分散修正手段が前記受信機時計ドリフトの分散を修正したとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を修正された受信機時計ドリフトの分散に置き換えて前記第1の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新するとともに、前記分散修正手段が前記受信機時計ドリフトの分散を修正しなかったとき、前記状態予測手段の算出結果及び前記観測データに基づいて前記第1の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新する状態推定更新手段と、を備えたことを特徴とする測位装置。
【請求項3】
前記受信機時計は、前記衛星に搭載された時計が有する発振器よりも安定度が低い発振器を備え、
前記分散修正手段は、前記受信機時計の発振器の周波数短期安定度により見積もられた値を前記閾値とするものであることを特徴とする請求項1又は請求項2に記載の測位装置。
【請求項1】
衛星航法システムにおいて衛星からの測位信号を受信する受信機の利用者の位置を測位する測位装置であって、
前記利用者の位置を示す利用者位置と、前記利用者の移動速度を示す利用者速度と、前記受信機が有する受信機時計の時刻と前記衛星航法システムにおける時刻との差を示す受信機時計オフセットと、前記受信機時計における単位時間当たりの前記受信機時計オフセットのずれを示す受信機時計ドリフトとを状態変数として含む状態変数ベクトルに基づき、前記衛星航法システムに関する状態予測及び状態推定を行うカルマンフィルタと、
前記衛星からの測位信号を受信して前記衛星の状態を示す観測データを取得する観測データ取得手段と、を備え、
前記カルマンフィルタは、
前記状態変数ベクトルの予測値及び予測誤差の共分散行列を算出する状態予測手段と、
前記状態予測手段の算出結果及び前記観測データに基づいて前記状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新する状態推定更新手段と、
前記状態予測手段が算出した状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、前記状態推定更新手段が算出した状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分を算出する差分算出手段と、
前記差分が予め定められた閾値を超えたとき、前記予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する分散修正手段と、を備え、
前記状態推定更新手段は、前記分散修正手段が前記受信機時計ドリフトの分散を修正したとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を修正された受信機時計ドリフトの分散に置き換えて前記状態変数ベクトルの推定値及び推定誤差の共分散行列を再計算するものであることを特徴とする測位装置。
【請求項2】
衛星航法システムにおいて衛星からの測位信号を受信する受信機の利用者の位置を測位する測位装置であって、
前記利用者の位置を示す利用者位置と、前記利用者の移動速度を示す利用者速度と、前記受信機が有する受信機時計の時刻と前記衛星航法システムにおける時刻との差を示す受信機時計オフセットと、前記受信機時計における単位時間当たりの前記受信機時計オフセットのずれを示す受信機時計ドリフトとを状態変数として含む第1の状態変数ベクトルに基づき、前記衛星航法システムに関する状態予測及び状態推定を行うカルマンフィルタと、
前記衛星からの測位信号を受信して前記衛星の状態を示す観測データを取得する観測データ取得手段と、を備え、
前記カルマンフィルタは、
前記第1の状態変数ベクトルの予測値及び予測誤差の共分散行列を算出する状態予測手段と、
前記状態予測手段の算出結果の内の前記利用者速度及び前記受信機時計ドリフトのみを状態変数として含む第2の状態変数ベクトルの予測値及び予測誤差の共分散行列と前記観測データとに基づいて前記第2の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出する状態推定手段と、
前記状態予測手段が算出した前記第1の状態変数ベクトルの予測値に含まれる受信機時計ドリフト予測値と、前記状態推定手段が算出した前記第2の状態変数ベクトルの推定値に含まれる受信機時計ドリフト推定値との差分を算出する差分算出手段と、
前記差分が予め定められた閾値を超えたとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を、より大きい値に修正する分散修正手段と、
前記分散修正手段が前記受信機時計ドリフトの分散を修正したとき、前記状態予測手段が算出した予測誤差の共分散行列に含まれる受信機時計ドリフトの分散を修正された受信機時計ドリフトの分散に置き換えて前記第1の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新するとともに、前記分散修正手段が前記受信機時計ドリフトの分散を修正しなかったとき、前記状態予測手段の算出結果及び前記観測データに基づいて前記第1の状態変数ベクトルの推定値及び推定誤差の共分散行列を算出して前記状態予測手段の算出結果を更新する状態推定更新手段と、を備えたことを特徴とする測位装置。
【請求項3】
前記受信機時計は、前記衛星に搭載された時計が有する発振器よりも安定度が低い発振器を備え、
前記分散修正手段は、前記受信機時計の発振器の周波数短期安定度により見積もられた値を前記閾値とするものであることを特徴とする請求項1又は請求項2に記載の測位装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−52954(P2012−52954A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−196795(P2010−196795)
【出願日】平成22年9月2日(2010.9.2)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年9月2日(2010.9.2)
【出願人】(000004330)日本無線株式会社 (1,186)
【Fターム(参考)】
[ Back to top ]