
測位装置
【課題】衛星の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができるようにする。
【解決手段】複数の候補位置pc毎に、電波が衛星#1,#2に到来する時間τ1(t),τ2(t)を算出する移動補償量計算部2と、到来時間τ1(t),τ2(t)を用いて、衛星#1,#2の受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、補償後の受信信号間の内積値cor(pc)を算出する内積値計算部4とを設け、複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
【解決手段】複数の候補位置pc毎に、電波が衛星#1,#2に到来する時間τ1(t),τ2(t)を算出する移動補償量計算部2と、到来時間τ1(t),τ2(t)を用いて、衛星#1,#2の受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、補償後の受信信号間の内積値cor(pc)を算出する内積値計算部4とを設け、複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、例えば、不法電波を発信している地上の送信局などの電波源の位置を測位する測位装置に関するものである。
【背景技術】
【0002】
例えば、以下の非特許文献1には、位置が未知である電波源から発信された電波が2機の衛星に到来する時間の差である到来時間差(TDOA:Time Difference of Arrival)の情報と、2機の衛星に到来する電波のドップラー周波数差(FDOA:Frequency Difference of Arrival)の情報とを用いて、その電波源の位置を測位する技術が開示されている。
【0003】
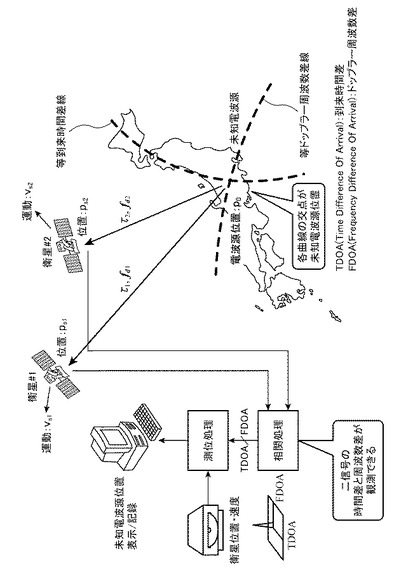
図5は非特許文献1に開示されている電波源の位置の測位処理を示す概念図である。
図5の例では、位置が未知である電波源から電波が送信されており、その電波は、メインローブの他にサイドローブなど、空間的に幅を持っているので、2機の衛星#1,#2により受信される。
2機の衛星#1,#2により受信された電波に係る受信信号に対する2次元相関処理を行うことにより、電波の到来時間差TDOA及びドップラー周波数差FDOAが計算される。
そして、電波の到来時間差TDOA及びドップラー周波数差FDOAから電波源の位置が測位される。
【0004】
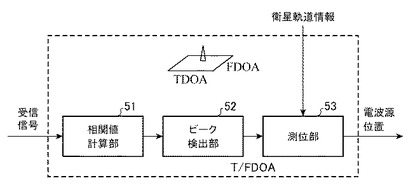
図6は従来の測位装置を示す構成図である。
相関値計算部51は、2機の衛星#1,#2により受信された電波に係る受信信号に対する2次元相関処理を行うことにより、電波の到来時間差TDOA及びドップラー周波数差FDOAを計算する。
具体的には、以下のようにして、電波の到来時間差TDOA及びドップラー周波数差FDOAを計算する。
実際に、到来時間差TDOA及びドップラー周波数差FDOAを計算する前に、各変数を下記のように定義する。
位置が未知である電波源から発信された電波が2機の衛星#1,#2に到来する時間である到来時間(TOA:Time of Arrival)τ1,τ2は、下記の式(1),(2)で表される。

ただし、p0は電波源の3次元位置ベクトル、ps1は衛星#1の3次元位置ベクトル、ps2は衛星#2の3次元位置ベクトルである。
【0005】
また、衛星#1,#2の速度の影響によるドップラー周波数FOA(Frequency Of Arrival)fd1,fd2は、下記の式(3),(4)で表される。
ただし、vs1は衛星#1の3次元速度ベクトル、vs2は衛星#2の3次元速度ベクトルである。
また、λ=c/fcは波長であり、fcは受信信号のキャリア周波数である。
【0006】
これにより、到来時間差TDOAは、下記の式(5)で表され、ドップラー周波数差FDOAは、下記の式(6)で表される。
ここでは、位置が未知である電波源は、地表面にあると仮定するので、
である。ただし、Reは地球の半径である。
【0007】
なお、到来時間差TDOA及びドップラー周波数差FDOAの値が得られれば、後述する測位部53が、式(5),(6),(7)の連立方程式を、電波源の3次元位置ベクトルp0について解くことで、電波源の3次元位置を測位することができる。
このとき、3次元位置ベクトルps1,ps2と3次元速度ベクトルvs1,vs2は、衛星の軌道情報として入手可能であるため、未知変数は電波源の3次元位置ベクトルp0のみである。
p0の次元は3次元であるため、未知数が3であり、式の数が3であるため、連立方程式を解くことができる。
【0008】
まず、相関値計算部51は、電波源から発信された電波に係る送信信号s(t)を下記の式(8)のように定義する。
ただし、a(t)は帯域を有する成分であり、ωc=2πfcである。
【0009】
この場合、2機の衛星#1,#2の受信信号s1(t),s2(t)は、下記の式(9),(10)で表される。
式(9),(10)において、τ1,τ2は電波の到来時間TOAであり、式(9),(10)は、ドップラー周波数FOAであるfd1,fd2を用いると、下記の式(11),(12)で表される。
ただし、ωd=2πfdである。
【0010】
相関値計算部51は、式(11),(12)で表される受信信号s1(t),s2(t)から到来時間差TDOA及びドップラー周波数差FDOAを算出するために、下記の式(13)で表される2次元相関を計算する。
この2次元相関は、下記の式(14)において、τがTDOA、fがFDOAであるときにピークを有し、その他の場合は、低い値をとる。
よって、相関ピークにおけるτがTDOA、fがFDOAとなる。
【0011】
なお、実際には、A/Dコンバータにより離散化された信号によって、以下の離散相関演算を用いる。離散化された信号を、次式で表記しなおす。
ただし、Δt=1/fsは時間方向のサンプル周期、Δf=1/Tは周波数方向のサンプル周期、Kはサンプル総数である。
【0012】
このとき、fsをサンプリング周波数、Tをサンプル時間長であるとすると、離散化2次元相関演算は、下記の式(17)で表される。
式(17)は、式(13)と同様に、相関ピークを持つn(τ=Δtn)がTDOAの値となり、相関ピークを持つm(f=Δfm)がFDOAの値となる。
【0013】
ピーク検出部52は、相関値計算部51が到来時間差TDOA及びドップラー周波数差FDOAを算出すると、相関値が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出する。
測位部53は、ピーク検出部52が、相関値が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出すると、その到来時間差TDOA及びドップラー周波数差FDOAを式(5),(6)に代入して、式(5),(6),(7)の連立方程式を電波源の3次元位置ベクトルp0について解くことにより、電波源の3次元位置を測位する。
【先行技術文献】
【非特許文献】
【0014】
【非特許文献1】D. P. Haworth, et.al,“Interference Localization For Eutelsat Satellites -The First European Transmitter Location System,” International Journal ff Satellite Communications, Vol.15, 155-183, 1997
【発明の概要】
【発明が解決しようとする課題】
【0015】
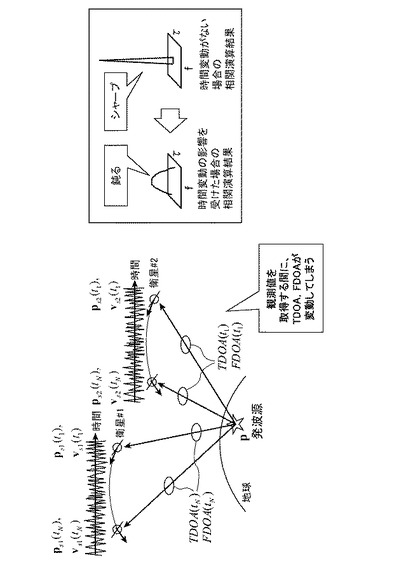
従来の測位装置は以上のように構成されているので、2次元相関のピークを算出する必要があるが、相関演算では、観測時間内のTDOA及びFDOAの値が一定であり、かつ、ピークは1つのみ立つと仮定しており、これらの仮定が成立しない場合には、以下の問題を生じる。
まず、衛星#1,#2は高速に移動するため、観測時間内でのTDOA及びFDOAの値の変動を無視することができない。観測時間内でのTDOA及びFDOAの時間変動を無視することができない場合(図7を参照)、相関ピークが積み上がらないため、TDOA及びFDOAの精度が劣化して、測位精度が劣化してしまう課題があった。
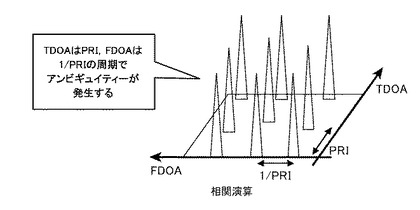
また、レーダパルス信号などの周期的な信号を受信する場合、パルス周期PRI(Pulse Repetition Interval)に相当する分のアンビギュイティーが発生する(図8を参照)。アンビギュイティーが発生すると、相関演算で複数のピークが検出されてしまうため、複数の測位位置の候補が得られてしまって、電波源の3次元位置を特定することができない課題があった。
【0016】
この発明は上記のような課題を解決するためになされたもので、衛星の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができる測位装置を得ることを目的とする。
また、この発明は、レーダパルス信号などの周期的な信号を受信する場合に、パルス周期PRIに相当する分のアンビギュイティーが発生しても、電波源の正確な位置を測位することができる測位装置を得ることを目的とする。
【課題を解決するための手段】
【0017】
この発明に係る測位装置は、位置が未知の電波源が存在している可能性がある複数の候補位置を設定する候補位置設定手段と、候補位置設定手段により設定された各々の候補位置に電波源が存在しているとして、その電波源から発信された電波が複数の衛星に到来する時間を算出する到来時間算出手段と、到来時間算出手段により算出された到来時間を用いて、複数の衛星により受信された電波に係る受信信号を補償する受信信号補償手段と、受信信号補償手段により補償された複数の受信信号間の内積値を算出する内積値算出手段とを設け、測位結果出力手段が、候補位置設定手段により設定された複数の候補位置の中で、内積値算出手段により算出された内積値が最大になる候補位置を特定し、その候補位置を電波源の測位結果として出力するようにしたものである。
【発明の効果】
【0018】
この発明によれば、位置が未知の電波源が存在している可能性がある複数の候補位置を設定する候補位置設定手段と、候補位置設定手段により設定された各々の候補位置に電波源が存在しているとして、その電波源から発信された電波が複数の衛星に到来する時間を算出する到来時間算出手段と、到来時間算出手段により算出された到来時間を用いて、複数の衛星により受信された電波に係る受信信号を補償する受信信号補償手段と、受信信号補償手段により補償された複数の受信信号間の内積値を算出する内積値算出手段とを設け、測位結果出力手段が、候補位置設定手段により設定された複数の候補位置の中で、内積値算出手段により算出された内積値が最大になる候補位置を特定し、その候補位置を電波源の測位結果として出力するように構成したので、衛星の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができる効果がある。
【図面の簡単な説明】
【0019】
【図1】この発明の実施の形態1による測位装置を示す構成図である。
【図2】この発明の実施の形態1による測位装置の補償処理を示す説明図である。
【図3】この発明の実施の形態3による測位装置を示す構成図である。
【図4】この発明の実施の形態4による測位装置を示す構成図である。
【図5】非特許文献1に開示されている電波源の位置の測位処理を示す概念図である。
【図6】従来の測位装置を示す構成図である。
【図7】衛星の高速移動によるTDOA/FDOAの時間変動を示す説明図である。
【図8】パルス周期PRIに相当する分のアンビギュイティーの発生を示す説明図である。
【発明を実施するための形態】
【0020】
実施の形態1.
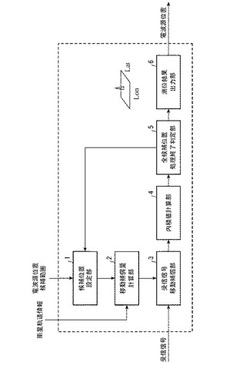
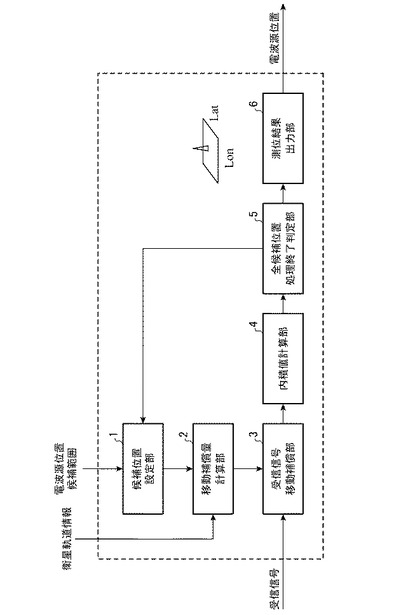
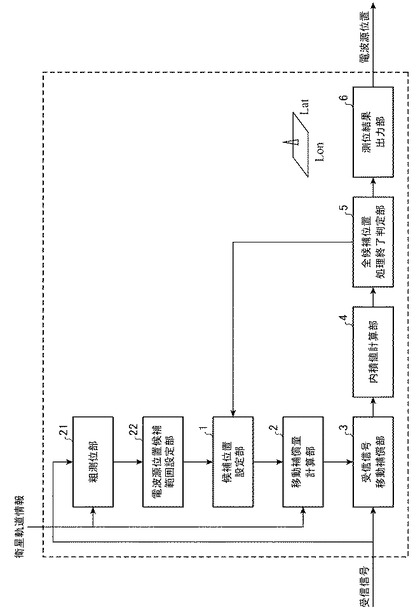
図1はこの発明の実施の形態1による測位装置を示す構成図である。
図1において、候補位置設定部1は電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する処理を実施する。なお、候補位置設定部1は候補位置設定手段を構成している。
移動補償量計算部2は2機の衛星#1,#2の軌道情報(例えば、衛星#1,#2の3次元位置ベクトルps1,ps2)を参照して、候補位置設定部1により設定された各々の候補位置pcに電波源が存在しているとして、その電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する処理を実施する。なお、移動補償量計算部2は到来時間算出手段を構成している。
【0021】
受信信号移動補償部3は移動補償量計算部2により算出された到来時間τc1(t),τc2(t)を用いて、衛星#1,衛星#2により受信された電波に係る受信信号s1(t),s2(t)を補償する処理を実施する。なお、受信信号移動補償部3は受信信号補償手段を構成している。
内積値計算部4は受信信号移動補償部3による補償後の受信信号c1(t),c2(t)間の内積値cor(pc)を算出する処理を実施する。なお、内積値計算部4は内積値算出手段を構成している。
【0022】
全候補位置処理終了判定部5は候補位置設定部1により設定された全ての候補位置pcについて、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理が終了しているか否かを判定し、全ての候補位置pcについて処理が終了するまで、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理を繰り返し実施させる。
測位結果出力部6は候補位置設定部1により設定された複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する処理を実施する。なお、測位結果出力部6は測位結果出力手段を構成している。
【0023】
図1の例では、測位装置の構成要素である候補位置設定部1、移動補償量計算部2、受信信号移動補償部3、内積値計算部4、全候補位置処理終了判定部5及び測位結果出力部6のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、測位装置がコンピュータで構成されていてもよい。
測位装置がコンピュータで構成されている場合、候補位置設定部1、移動補償量計算部2、受信信号移動補償部3、内積値計算部4、全候補位置処理終了判定部5及び測位結果出力部6の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
【0024】
次に動作について説明する。
図1の測位装置の概要としては、電波源が存在している可能性がある複数の候補位置pc毎に、当該候補位置pcに存在している可能性がある電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出し、その到来時間τc1(t),τc2(t)を用いて、衛星#1,衛星#2の受信信号s1(t),s2(t)を補償する(衛星#1,衛星#2の高速移動に伴う受信信号s1(t),s2(t)の影響を補償する)。そして、補償後の受信信号c1(t),c2(t)間の内積値cor(pc)を算出するが、内積値が高いことは、類似性が高いことを意味するので、全ての候補位置pcの中で、内積値が最も高くなる候補位置pcを最終的な測位結果として選択する。
これにより、測位精度の向上が図られる。また、レーダパルス等の周期信号であれば、アンビギュイティー位置に基づく補償値を用いても、相関ピークが高くならないため、結果的に、アンビギュイティーの排除も可能となる。
【0025】
以下、図1の測位装置の処理内容を具体的に説明する。
まず、未知の電波源から発信された電波に係る送信信号s(t)を下記の式(18)のように定義する。式(18)は、背景技術に記載している式(8)と同様である。
ただし、a(t)は帯域を有する成分であり、ωc=2πfcである。
【0026】
この場合、2機の衛星#1,#2の受信信号s1(t),s2(t)は、下記の式(19),(20)で表される。
ここで、式(19),(20)と背景技術に記載している式(8),(9)との違いは、電波の到来時間TOAであるτ1(t),τ2(t)が時間の関数になっている点である。
【0027】
この場合、時刻tにおけるτ1(t),τ2(t)は、下記の式(21),(22)で表される。
【0028】
以下、2機の衛星#1,#2の受信信号s1(t),s2(t)は、受信側の処理でωhだけダウンコンバートされているものとして考える。
【0029】
衛星#1,#2の移動の影響で、観測時間内で到来時間差TDOA及びドップラー周波数差FDOAが大きく時間変動する場合、背景技術に記載している式(13)または式(17)で、受信信号s1(t),s2(t)の相関演算を実施しても、相関が積み上がらないため、シャープな相関ピークが得られない。
そこで、この実施の形態1では、受信信号s1(t),s2(t)を移動補償してから内積値を算出する方法を採用する。
即ち、ある測位位置の候補をpcと仮定し、その候補位置pcを用いて、衛星#1,#2の受信信号s1(t),s2(t)が同じなるように補償し、補償後の受信信号c1(t),c2(t)間の内積値を算出する。
この内積値が高ければ、受信信号間の類似度が高いことを意味するので、候補位置pcが正解であれば、正しく補償ができていることになり、高い内積値が得られる。
【0030】
まず、候補位置設定部1は、電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する。
そして、複数の候補位置pcの中から、未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
【0031】
移動補償量計算部2は、候補位置設定部1から1つの候補位置pcを受けると、その候補位置pcに電波源が存在していると仮定し、衛星#1,#2の軌道情報(衛星#1,#2の3次元位置ベクトルps1,ps2)を用いて、その候補位置pcに存在している電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する。
【0032】
受信信号移動補償部3は、移動補償量計算部2が到来時間τc1(t),τc2(t)を算出すると、その到来時間τc1(t),τc2(t)を用いて、衛星#1,衛星#2により受信された電波に係る受信信号s1(t),s2(t)を補償する。
ここでは、キャリア周波数ωcが未知の場合を仮定する。
ダウンコンバート周波数ωhは既知であるが、ωh≠ωcであるため、キャリア成分が残っている。
そのため、受信信号移動補償部3は、下記の式(27),(28)のように受信信号s1(t),s2(t)を補償して、補償後の受信信号である補償信号c1(t),c2(t)を出力する。
【0033】
内積値計算部4は、受信信号移動補償部3から補償信号c1(t),c2(t)を受けると、その補償信号c1(t)と補償信号c2(t)の類似度を評価するため、下記の式(29)に示すように、補償信号c1(t),c2(t)間の内積値cor(pc)を算出する。
【0034】
このとき、候補位置pcが正解であれば、τc1(t)=τ1(t),τc2(t)=τ2(t)となり、式(27)は、下記の式(30)のように表される。同様に、式(28)は、下記の式(31)のように表される。
この場合、式(29)の内積値は最大値をとる。
【0035】
全候補位置処理終了判定部5は、候補位置設定部1により設定された全ての候補位置pcについて、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理が終了(内積値cor(pc)の算出処理が終了)しているか否かを判定し、全ての候補位置pcについて処理が終了するまで、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理を繰り返し実施させる。
なお、全候補位置処理終了判定部5の指示の下、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理を繰り返し実施する場合、候補位置設定部1が未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
【0036】
測位結果出力部6は、候補位置設定部1により設定された全ての候補位置pcについて、内積値cor(pc)の算出処理が終了すると、候補位置設定部1により設定された全ての候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
なお、アンビギュイティー位置の補償値は、真の補償値と異なるため、アンビギュイティー位置では、相関ピークが立たず、正解の位置でのみ、相関ピークが立つようになる。
よって、アンビギュイティー位置を排除して、正解の位置のみを測位結果として出力することができる。
【0037】
ここまでは、ωh≠ωcである例を説明したが、ωh=ωcである場合、候補位置pcが正解であれば、τc1(t)=τ1(t),τc2(t)=τ2(t)となり、式(30)は下記の式(33)のように表され、式(31)は下記の式(34)のように表される。
また、信号が正弦波である場合、式(30)は下記の式(35)のように表され、式(31)は下記の式(36)のように表される。
また、ωh=ωcであり、かつ、信号が正弦波である場合、式(30)は下記の式(37)のように表され、式(31)は下記の式(38)のように表される。
【0038】
この実施の形態1及び後述する実施の形態に共通する事項として、電波源から送信される信号が連続信号であるものとして説明しているが、実際の信号処理では、A/D変換器によりサンプル化された離散信号を扱うので、それぞれの式を以下のように置き換えて、用いる。
(1)受信信号は、s1(k)=s1(t)|t=Δtk,s2(k)=s2(t)|t=Δtk
というように、サンプル周期Δtで離散的に得られる。
(2)補償信号c1(k),c2(k)を生成する際、離散信号では、サンプルの間の情
報が得られないので、例えば、スプライン補間など、何らかの補間処理を用いる。
(3)内積値を演算する式(29)は、下記の式(39)に置き換える。
実際の処理は、以上を置き換えて行えばよく、式(32)に示す内積値の最大値は、下記の式(40)となる。
【0039】
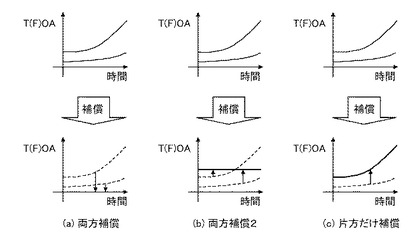
ただし、以下の点にも留意する必要がある。
(1)式(27)及び式(28)では、図2(a)に示すように、
補償信号c1(t),c2(t)として、TOA及びFOAが零となるような補償を
行っている。
(2)式(27)及び式(28)では、受信信号s1(t),s2(t)から
補償信号c1(t),c2(t)を計算しているが、大事なのは、到来時間τ1(t)
,τ2(t)の差(Δτ12(t)=τ1(t)−τ2(t))のみであるので、
補間処理における時間シフト量を小さく済ませる必要があれば、バイアス成分を除去
して、シフト量を設定すればよい(図2(b)を参照)。
即ち、実際のシフト量は、τ1(t)−b,τ2(t)−bでよい。
(3)式(27)及び式(28)では、受信信号s1(t),s2(t)から
補償信号c1(t),c2(t)を計算しているが、大事なのは、到来時間τ1(t)
,τ2(t)の差(Δτ12(t)=τ1(t)−τ2(t))のみであるので、片方
だけ、Δτ12(t)シフトすればよい(図2(c)を参照)。
例えば、S/Nのより高い信号のみ、補間処理を行えばよい。
【0040】
以上で明らかなように、この実施の形態1によれば、電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する候補位置設定部1と、候補位置設定部1により設定された各々の候補位置pcに電波源が存在しているとして、その電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する移動補償量計算部2と、移動補償量計算部2により算出された到来時間τ1(t),τ2(t)を用いて、衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、受信信号移動補償部3による補償後の受信信号である補償信号c1(t),c2(t)間の内積値cor(pc)を算出する内積値計算部4とを設け、測位結果出力部6が、候補位置設定部1により設定された複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力するように構成したので、衛星#1,#2の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができる効果を奏する。
【0041】
なお、この実施の形態1では、2機の衛星#1,#2が電波源から発信された電波を受信するものを示したが、3機以上の衛星が電波源から発信された電波を受信するようにしてもよい。
例えば、3機の衛星#1,#2,#3が電波源から発信された電波を受信する場合、電波が衛星#1,#2,#3に到来する時間τ1(t),τ2(t),τ3(t)を算出するとともに、その到来時間τ1(t),τ2(t),τ3(t)を用いて、衛星#1,#2,#3の受信信号s1(t),s2(t),s3(t)を補償し、補償信号c1(t),c2(t)間の内積値cor1(pc)と、補償信号c2(t),c3(t)間の内積値cor2(pc)と、補償信号c3(t),c1(t)間の内積値cor3(pc)とを算出する。
そして、複数の候補位置pcの中で、例えば、内積値の総和(cor1(pc)+cor2(pc)+cor3(pc))が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力するようにする。
【0042】
実施の形態2.
この実施の形態2の測位装置の構成は、上記実施の形態1の測位装置と同様であるが、移動補償の方法が異なっている。
ここでは、キャリア周波数fcが既知であるとして、受信信号移動補償部3が、そのキャリア周波数fcを用いて、移動補償を行う方法を説明する。
【0043】
以下、衛星#1,#2の受信信号s1(t),s2(t)は、ある周波数帯でωhだけダウンコンバートされているものとする。
【0044】
衛星#1,#2の受信信号s1(t),s2(t)が同じ信号となるように補償すると、補償信号c1(t),c2(t)は、下記の式(43),(44)のようになる。
式(43),(44)では、キャリア周波数ωcが既知であるとして、キャリア成分を除去するためのe-j(ωc-ωd)t項による乗算を加えている。
【0045】
式(43),(44)において、補償項が正しい場合、pc=p0であるため、式(43)は下記の式(45)となり、式(44)は下記の式(46)となる。
この場合、内積値cor(pc)は、下記の式(47)となり、最大値をとる。
【0046】
逆に補償項が正しくない場合、式(29)は低い値をとる。この性質を利用し、電波源の候補位置pcについて、式(43)及び式(44)を計算して内積値cor(pc)を評価し、その内積値cor(pc)が最大になる候補位置pcを測位位置として出力する。
なお、信号が無変調連続波(CW)である場合、式(45),(46)は、下記の式(48),(49)となる。
【0047】
実施の形態3.
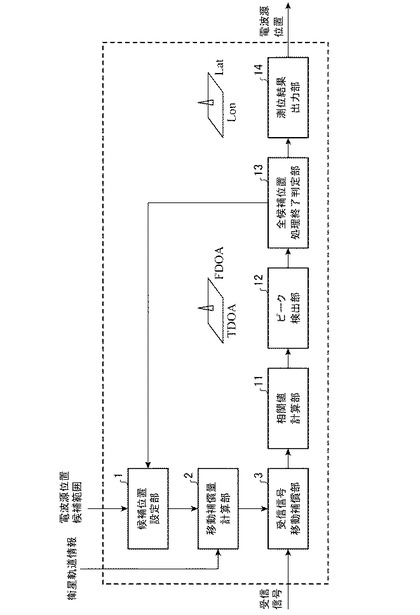
図3はこの発明の実施の形態3による測位装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
相関値計算部11は受信信号移動補償部3による補償後の受信信号c1(t),c2(t)間の2次元相関値ccf(τ,f)を算出する処理を実施する。なお、相関値計算部11は2次元相関値算出手段を構成している。
ピーク検出部12は相関値計算部11により算出された2次元相関値ccf(τ,f)が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出する処理を実施する。
【0048】
全候補位置処理終了判定部13は候補位置設定部1により設定された全ての候補位置pcについて、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理が終了しているか否かを判定し、全ての候補位置pcについて処理が終了するまで、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理を繰り返し実施させる。
測位結果出力部14は候補位置設定部1により設定された複数の候補位置pcの中で、ピーク検出部12により検出された到来時間差TDOA及びドップラー周波数差FDOAが最も高い候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する処理を実施する。なお、測位結果出力部14は測位結果出力手段を構成している。
【0049】
図3の例では、測位装置の構成要素である候補位置設定部1、移動補償量計算部2、受信信号移動補償部3、相関値計算部11、ピーク検出部12、全候補位置処理終了判定部13及び測位結果出力部14のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、測位装置がコンピュータで構成されていてもよい。
測位装置がコンピュータで構成されている場合、候補位置設定部1、移動補償量計算部2、受信信号移動補償部3、相関値計算部11、ピーク検出部12、全候補位置処理終了判定部13及び測位結果出力部14の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
【0050】
次に動作について説明する。
候補位置設定部1は、上記実施の形態1と同様に、電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する。
そして、複数の候補位置pcの中から、未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
【0051】
移動補償量計算部2は、候補位置設定部1から1つの候補位置pcを受けると、上記実施の形態1と同様に、その候補位置pcに電波源が存在していると仮定し、衛星#1,#2の軌道情報(衛星#1,#2の3次元位置ベクトルps1,ps2)を用いて、その候補位置pcに存在している電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する(式(25),(26)を参照)。
【0052】
受信信号移動補償部3は、移動補償量計算部2が到来時間τc1(t),τc2(t)を算出すると、上記実施の形態1と同様に、その到来時間τc1(t),τc2(t)を用いて、衛星#1,衛星#2により受信された電波に係る受信信号s1(t),s2(t)を補償して、補償後の受信信号である補償信号c1(t),c2(t)を出力する(式(27),(28)を参照)。
【0053】
相関値計算部11は、受信信号移動補償部3から補償信号c1(t),c2(t)を受けると、下記の式(50)に示すように、その補償信号c1(t),c2(t)間の2次元相関値ccf(τ,f)を算出する。
この2次元相関は、下記の式(51)において、τがTDOA、fがFDOAであるときにピークを有し、その他の場合は、低い値をとる。
よって、相関ピークにおけるτがTDOA、fがFDOAとなる。
【0054】
ピーク検出部12は、相関値計算部11が2次元相関値ccf(τ,f)を算出すると、その2次元相関値ccf(τ,f)が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出する。即ち、相関ピークにおけるτを到来時間差TDOAとして検出し、相関ピークにおけるfをドップラー周波数差FDOAとして検出する。
この実施の形態1では、補償信号c1(t),c2(t)を計算してから、その補償信号c1(t),c2(t)間の2次元相関値ccf(τ,f)を算出して、相関ピークを検出しているが、この場合、相関ピークが原点に立つので、相関ピークを検出することは、上記実施の形態1のように、補償信号c1(t),c2(t)間の内積値を計算することに相当する。
【0055】
全候補位置処理終了判定部13は、候補位置設定部1により設定された全ての候補位置pcについて、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理が終了(相関ピークの検出処理が終了)しているか否かを判定し、全ての候補位置pcについて処理が終了するまで、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理を繰り返し実施させる。
なお、全候補位置処理終了判定部13の指示の下、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理を繰り返し実施する場合、候補位置設定部1が未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
【0056】
測位結果出力部14は、候補位置設定部1により設定された全ての候補位置pcについて、相関ピークの検出処理が終了すると、候補位置設定部1により設定された全ての候補位置pcの中で、ピーク検出部12により検出された到来時間差TDOA及びドップラー周波数差FDOAが最も高い候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
なお、アンビギュイティー位置の補償値は、真の補償値と異なるため、アンビギュイティー位置では、相関ピークが立たず、正解の位置でのみ、相関ピークが立つようになる。
よって、アンビギュイティー位置を排除して、正解の位置のみを測位結果として出力することができる。
【0057】
以上で明らかなように、この実施の形態3によれば、電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する候補位置設定部1と、候補位置設定部1により設定された各々の候補位置pcに電波源が存在しているとして、その電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する移動補償量計算部2と、移動補償量計算部2により算出された到来時間τ1(t),τ2(t)を用いて、衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、受信信号移動補償部3による補償後の受信信号である補償信号c1(t),c2(t)間の2次元相関値ccf(τ,f)を算出する相関値計算部11と、相関値計算部11により算出された2次元相関値ccf(τ,f)が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出するピーク検出部12とを設け、測位結果出力部14が、候補位置設定部1により設定された複数の候補位置pcの中で、ピーク検出部12により検出された到来時間差TDOA及びドップラー周波数差FDOAが最も高い候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力するように構成したので、衛星#1,#2の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができる効果を奏する。
【0058】
なお、この実施の形態3では、2機の衛星#1,#2が電波源から発信された電波を受信するものを示したが、上記実施の形態1と同様に、3機以上の衛星が電波源から発信された電波を受信するようにしてもよい。
例えば、3機の衛星#1,#2,#3が電波源から発信された電波を受信する場合、電波が衛星#1,#2,#3に到来する時間τ1(t),τ2(t),τ3(t)を算出するとともに、その到来時間τ1(t),τ2(t),τ3(t)を用いて、衛星#1,#2,#3の受信信号s1(t),s2(t),s3(t)を補償し、補償信号c1(t),c2(t)間の2次元相関値ccf1(τ,f)が最大となる到来時間差TDOA1及びドップラー周波数差FDOA1、補償信号c2(t),c3(t)間の2次元相関値ccf2(τ,f)が最大となる到来時間差TDOA2及びドップラー周波数差FDOA2、及び補償信号c3(t),c1(t)間の2次元相関値ccf3(τ,f)が最大となる到来時間差TDOA3及びドップラー周波数差FDOA3を検出する。
そして、複数の候補位置pcの中で、例えば、到来時間差TDOA及びドップラー周波数差FDOAの総和(TDOA1+TDOA2+TDOA3,FDOA1+FDOA2+FDOA3)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力するようにする。
【0059】
実施の形態4.
図4はこの発明の実施の形態4による測位装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
粗測位部21は衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)と衛星#1,#2の軌道情報を用いて、その受信信号s1(t),s2(t)間の2次元相関値を算出し、2次元相関値のピークを検出することで、電波源が存在している位置の粗測位を実施する。なお、粗測位部21は粗測位手段を構成している。
【0060】
電波源位置候補範囲設定部22は粗測位部21により粗測位された位置の周辺の範囲を電波源位置候補範囲(電波源が存在している可能性がある地表面)に設定し、その電波源位置候補範囲を候補位置設定部1に出力する処理を実施する。
なお、候補位置設定部1及び電波源位置候補範囲設定部22から候補位置設定手段が構成されている。
【0061】
図4では、粗測位部21及び電波源位置候補範囲設定部22が図1の測位装置に適用されている例を示しているが、粗測位部21及び電波源位置候補範囲設定部22が図3の測位装置に適用されていてもよい。
【0062】
次に動作について説明する。
粗測位部21は、衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)と衛星#1,#2の軌道情報を用いて、その受信信号s1(t),s2(t)間の2次元相関値を算出する。即ち、背景技術に記載している式(13)で表される2次元相関値ccf(τ,f)を算出する。
粗測位部21は、2次元相関値ccf(τ,f)を算出すると、その2次元相関値ccf(τ,f)のピークを検出して、2次元相関値ccf(τ,f)が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出する。
【0063】
粗測位部21は、到来時間差TDOA及びドップラー周波数差FDOAを検出すると、その到来時間差TDOA及びドップラー周波数差FDOAを背景技術に記載している式(5),(6)に代入して、式(5),(6),(7)の連立方程式を電波源の3次元位置ベクトルp0について解くことにより、電波源の3次元位置を粗測位する。
なお、2次元相関値ccf(τ,f)のピークは、上述したように、低い可能性があるが、この2次元相関値ccf(τ,f)から正確な位置を測位するのではなく、電波源位置候補範囲を限定する目的で、3次元位置の粗測位に利用する分には、ピークが立っていれば、測位精度の劣化を招くことはない。
【0064】
電波源位置候補範囲設定部22は、粗測位部21が電波源の3次元位置を粗測位すると、その3次元位置を含む周辺の範囲を電波源位置候補範囲(電波源が存在している可能性がある地表面)に設定し、その電波源位置候補範囲を候補位置設定部1に出力する。
候補位置設定部1は、電波源位置候補範囲設定部22から電波源位置候補範囲を受けると、その電波源位置候補範囲が示す領域をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する。
そして、複数の候補位置pcの中から、未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
以下の処理内容は、上記実施の形態1〜3と同様であるため説明を省略する。
【0065】
以上で明らかなように、この実施の形態4によれば、衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)と衛星#1,#2の軌道情報を用いて、その受信信号s1(t),s2(t)間の2次元相関値を算出し、2次元相関値のピークを検出することで、電波源が存在している位置を粗測位する粗測位部21を設け、電波源位置候補範囲設定部22が、粗測位部21により粗測位された位置の周辺の範囲を電波源位置候補範囲に設定し、その電波源位置候補範囲を候補位置設定部1に出力するように構成したので、電波源の位置の探索範囲が制限されて、測位装置の演算負荷が軽減される効果が得られる。
【0066】
実施の形態5.
上記実施の形態4では、粗測位部21により粗測位された位置の周辺の範囲を電波源位置候補範囲に設定するものを示したが、アンビギュイティーの影響で2次元相関値のピークが複数検出されて、電波源が存在している位置が複数粗測位される場合がある。
このように複数の位置が粗測位される場合、電波源位置候補範囲設定部22が、粗測位部21により粗測位された各位置の周辺の範囲をそれぞれ電波源位置候補範囲に設定するようにする。
この場合、候補位置設定部1は、電波源位置候補範囲設定部22により設定された複数の電波源位置候補範囲が示す領域をそれぞれグリッド状に分割し、それぞれの各分割領域を電波源が存在している可能性がある候補位置pcに設定する。
これにより、上記実施の形態4よりも、電波源の位置の探索範囲が広がってしまうが、上記実施の形態1〜3よりは、電波源の位置の探索範囲を制限することができる。また、アンビギュイティー位置を排除することができる。
【0067】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0068】
1 候補位置設定部(候補位置設定手段)、2 移動補償量計算部(到来時間算出手段)、3 受信信号移動補償部(受信信号補償手段)、4 内積値計算部(内積値算出手段)、5 全候補位置処理終了判定部、6 測位結果出力部(測位結果出力手段)、11 相関値計算部(2次元相関値算出手段)、12 ピーク検出部、13 全候補位置処理終了判定部、14 測位結果出力部(測位結果出力手段)、21 粗測位部(粗測位手段)、22 電波源位置候補範囲設定部(候補位置設定手段)、51 相関値計算部、52 ピーク検出部、53 測位部。
【技術分野】
【0001】
この発明は、例えば、不法電波を発信している地上の送信局などの電波源の位置を測位する測位装置に関するものである。
【背景技術】
【0002】
例えば、以下の非特許文献1には、位置が未知である電波源から発信された電波が2機の衛星に到来する時間の差である到来時間差(TDOA:Time Difference of Arrival)の情報と、2機の衛星に到来する電波のドップラー周波数差(FDOA:Frequency Difference of Arrival)の情報とを用いて、その電波源の位置を測位する技術が開示されている。
【0003】
図5は非特許文献1に開示されている電波源の位置の測位処理を示す概念図である。
図5の例では、位置が未知である電波源から電波が送信されており、その電波は、メインローブの他にサイドローブなど、空間的に幅を持っているので、2機の衛星#1,#2により受信される。
2機の衛星#1,#2により受信された電波に係る受信信号に対する2次元相関処理を行うことにより、電波の到来時間差TDOA及びドップラー周波数差FDOAが計算される。
そして、電波の到来時間差TDOA及びドップラー周波数差FDOAから電波源の位置が測位される。
【0004】
図6は従来の測位装置を示す構成図である。
相関値計算部51は、2機の衛星#1,#2により受信された電波に係る受信信号に対する2次元相関処理を行うことにより、電波の到来時間差TDOA及びドップラー周波数差FDOAを計算する。
具体的には、以下のようにして、電波の到来時間差TDOA及びドップラー周波数差FDOAを計算する。
実際に、到来時間差TDOA及びドップラー周波数差FDOAを計算する前に、各変数を下記のように定義する。
位置が未知である電波源から発信された電波が2機の衛星#1,#2に到来する時間である到来時間(TOA:Time of Arrival)τ1,τ2は、下記の式(1),(2)で表される。
ただし、p0は電波源の3次元位置ベクトル、ps1は衛星#1の3次元位置ベクトル、ps2は衛星#2の3次元位置ベクトルである。
【0005】
また、衛星#1,#2の速度の影響によるドップラー周波数FOA(Frequency Of Arrival)fd1,fd2は、下記の式(3),(4)で表される。
ただし、vs1は衛星#1の3次元速度ベクトル、vs2は衛星#2の3次元速度ベクトルである。
また、λ=c/fcは波長であり、fcは受信信号のキャリア周波数である。
【0006】
これにより、到来時間差TDOAは、下記の式(5)で表され、ドップラー周波数差FDOAは、下記の式(6)で表される。
ここでは、位置が未知である電波源は、地表面にあると仮定するので、
である。ただし、Reは地球の半径である。
【0007】
なお、到来時間差TDOA及びドップラー周波数差FDOAの値が得られれば、後述する測位部53が、式(5),(6),(7)の連立方程式を、電波源の3次元位置ベクトルp0について解くことで、電波源の3次元位置を測位することができる。
このとき、3次元位置ベクトルps1,ps2と3次元速度ベクトルvs1,vs2は、衛星の軌道情報として入手可能であるため、未知変数は電波源の3次元位置ベクトルp0のみである。
p0の次元は3次元であるため、未知数が3であり、式の数が3であるため、連立方程式を解くことができる。
【0008】
まず、相関値計算部51は、電波源から発信された電波に係る送信信号s(t)を下記の式(8)のように定義する。
ただし、a(t)は帯域を有する成分であり、ωc=2πfcである。
【0009】
この場合、2機の衛星#1,#2の受信信号s1(t),s2(t)は、下記の式(9),(10)で表される。
式(9),(10)において、τ1,τ2は電波の到来時間TOAであり、式(9),(10)は、ドップラー周波数FOAであるfd1,fd2を用いると、下記の式(11),(12)で表される。
ただし、ωd=2πfdである。
【0010】
相関値計算部51は、式(11),(12)で表される受信信号s1(t),s2(t)から到来時間差TDOA及びドップラー周波数差FDOAを算出するために、下記の式(13)で表される2次元相関を計算する。
この2次元相関は、下記の式(14)において、τがTDOA、fがFDOAであるときにピークを有し、その他の場合は、低い値をとる。
よって、相関ピークにおけるτがTDOA、fがFDOAとなる。
【0011】
なお、実際には、A/Dコンバータにより離散化された信号によって、以下の離散相関演算を用いる。離散化された信号を、次式で表記しなおす。
ただし、Δt=1/fsは時間方向のサンプル周期、Δf=1/Tは周波数方向のサンプル周期、Kはサンプル総数である。
【0012】
このとき、fsをサンプリング周波数、Tをサンプル時間長であるとすると、離散化2次元相関演算は、下記の式(17)で表される。
式(17)は、式(13)と同様に、相関ピークを持つn(τ=Δtn)がTDOAの値となり、相関ピークを持つm(f=Δfm)がFDOAの値となる。
【0013】
ピーク検出部52は、相関値計算部51が到来時間差TDOA及びドップラー周波数差FDOAを算出すると、相関値が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出する。
測位部53は、ピーク検出部52が、相関値が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出すると、その到来時間差TDOA及びドップラー周波数差FDOAを式(5),(6)に代入して、式(5),(6),(7)の連立方程式を電波源の3次元位置ベクトルp0について解くことにより、電波源の3次元位置を測位する。
【先行技術文献】
【非特許文献】
【0014】
【非特許文献1】D. P. Haworth, et.al,“Interference Localization For Eutelsat Satellites -The First European Transmitter Location System,” International Journal ff Satellite Communications, Vol.15, 155-183, 1997
【発明の概要】
【発明が解決しようとする課題】
【0015】
従来の測位装置は以上のように構成されているので、2次元相関のピークを算出する必要があるが、相関演算では、観測時間内のTDOA及びFDOAの値が一定であり、かつ、ピークは1つのみ立つと仮定しており、これらの仮定が成立しない場合には、以下の問題を生じる。
まず、衛星#1,#2は高速に移動するため、観測時間内でのTDOA及びFDOAの値の変動を無視することができない。観測時間内でのTDOA及びFDOAの時間変動を無視することができない場合(図7を参照)、相関ピークが積み上がらないため、TDOA及びFDOAの精度が劣化して、測位精度が劣化してしまう課題があった。
また、レーダパルス信号などの周期的な信号を受信する場合、パルス周期PRI(Pulse Repetition Interval)に相当する分のアンビギュイティーが発生する(図8を参照)。アンビギュイティーが発生すると、相関演算で複数のピークが検出されてしまうため、複数の測位位置の候補が得られてしまって、電波源の3次元位置を特定することができない課題があった。
【0016】
この発明は上記のような課題を解決するためになされたもので、衛星の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができる測位装置を得ることを目的とする。
また、この発明は、レーダパルス信号などの周期的な信号を受信する場合に、パルス周期PRIに相当する分のアンビギュイティーが発生しても、電波源の正確な位置を測位することができる測位装置を得ることを目的とする。
【課題を解決するための手段】
【0017】
この発明に係る測位装置は、位置が未知の電波源が存在している可能性がある複数の候補位置を設定する候補位置設定手段と、候補位置設定手段により設定された各々の候補位置に電波源が存在しているとして、その電波源から発信された電波が複数の衛星に到来する時間を算出する到来時間算出手段と、到来時間算出手段により算出された到来時間を用いて、複数の衛星により受信された電波に係る受信信号を補償する受信信号補償手段と、受信信号補償手段により補償された複数の受信信号間の内積値を算出する内積値算出手段とを設け、測位結果出力手段が、候補位置設定手段により設定された複数の候補位置の中で、内積値算出手段により算出された内積値が最大になる候補位置を特定し、その候補位置を電波源の測位結果として出力するようにしたものである。
【発明の効果】
【0018】
この発明によれば、位置が未知の電波源が存在している可能性がある複数の候補位置を設定する候補位置設定手段と、候補位置設定手段により設定された各々の候補位置に電波源が存在しているとして、その電波源から発信された電波が複数の衛星に到来する時間を算出する到来時間算出手段と、到来時間算出手段により算出された到来時間を用いて、複数の衛星により受信された電波に係る受信信号を補償する受信信号補償手段と、受信信号補償手段により補償された複数の受信信号間の内積値を算出する内積値算出手段とを設け、測位結果出力手段が、候補位置設定手段により設定された複数の候補位置の中で、内積値算出手段により算出された内積値が最大になる候補位置を特定し、その候補位置を電波源の測位結果として出力するように構成したので、衛星の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができる効果がある。
【図面の簡単な説明】
【0019】
【図1】この発明の実施の形態1による測位装置を示す構成図である。
【図2】この発明の実施の形態1による測位装置の補償処理を示す説明図である。
【図3】この発明の実施の形態3による測位装置を示す構成図である。
【図4】この発明の実施の形態4による測位装置を示す構成図である。
【図5】非特許文献1に開示されている電波源の位置の測位処理を示す概念図である。
【図6】従来の測位装置を示す構成図である。
【図7】衛星の高速移動によるTDOA/FDOAの時間変動を示す説明図である。
【図8】パルス周期PRIに相当する分のアンビギュイティーの発生を示す説明図である。
【発明を実施するための形態】
【0020】
実施の形態1.
図1はこの発明の実施の形態1による測位装置を示す構成図である。
図1において、候補位置設定部1は電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する処理を実施する。なお、候補位置設定部1は候補位置設定手段を構成している。
移動補償量計算部2は2機の衛星#1,#2の軌道情報(例えば、衛星#1,#2の3次元位置ベクトルps1,ps2)を参照して、候補位置設定部1により設定された各々の候補位置pcに電波源が存在しているとして、その電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する処理を実施する。なお、移動補償量計算部2は到来時間算出手段を構成している。
【0021】
受信信号移動補償部3は移動補償量計算部2により算出された到来時間τc1(t),τc2(t)を用いて、衛星#1,衛星#2により受信された電波に係る受信信号s1(t),s2(t)を補償する処理を実施する。なお、受信信号移動補償部3は受信信号補償手段を構成している。
内積値計算部4は受信信号移動補償部3による補償後の受信信号c1(t),c2(t)間の内積値cor(pc)を算出する処理を実施する。なお、内積値計算部4は内積値算出手段を構成している。
【0022】
全候補位置処理終了判定部5は候補位置設定部1により設定された全ての候補位置pcについて、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理が終了しているか否かを判定し、全ての候補位置pcについて処理が終了するまで、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理を繰り返し実施させる。
測位結果出力部6は候補位置設定部1により設定された複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する処理を実施する。なお、測位結果出力部6は測位結果出力手段を構成している。
【0023】
図1の例では、測位装置の構成要素である候補位置設定部1、移動補償量計算部2、受信信号移動補償部3、内積値計算部4、全候補位置処理終了判定部5及び測位結果出力部6のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、測位装置がコンピュータで構成されていてもよい。
測位装置がコンピュータで構成されている場合、候補位置設定部1、移動補償量計算部2、受信信号移動補償部3、内積値計算部4、全候補位置処理終了判定部5及び測位結果出力部6の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
【0024】
次に動作について説明する。
図1の測位装置の概要としては、電波源が存在している可能性がある複数の候補位置pc毎に、当該候補位置pcに存在している可能性がある電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出し、その到来時間τc1(t),τc2(t)を用いて、衛星#1,衛星#2の受信信号s1(t),s2(t)を補償する(衛星#1,衛星#2の高速移動に伴う受信信号s1(t),s2(t)の影響を補償する)。そして、補償後の受信信号c1(t),c2(t)間の内積値cor(pc)を算出するが、内積値が高いことは、類似性が高いことを意味するので、全ての候補位置pcの中で、内積値が最も高くなる候補位置pcを最終的な測位結果として選択する。
これにより、測位精度の向上が図られる。また、レーダパルス等の周期信号であれば、アンビギュイティー位置に基づく補償値を用いても、相関ピークが高くならないため、結果的に、アンビギュイティーの排除も可能となる。
【0025】
以下、図1の測位装置の処理内容を具体的に説明する。
まず、未知の電波源から発信された電波に係る送信信号s(t)を下記の式(18)のように定義する。式(18)は、背景技術に記載している式(8)と同様である。
ただし、a(t)は帯域を有する成分であり、ωc=2πfcである。
【0026】
この場合、2機の衛星#1,#2の受信信号s1(t),s2(t)は、下記の式(19),(20)で表される。
ここで、式(19),(20)と背景技術に記載している式(8),(9)との違いは、電波の到来時間TOAであるτ1(t),τ2(t)が時間の関数になっている点である。
【0027】
この場合、時刻tにおけるτ1(t),τ2(t)は、下記の式(21),(22)で表される。
【0028】
以下、2機の衛星#1,#2の受信信号s1(t),s2(t)は、受信側の処理でωhだけダウンコンバートされているものとして考える。
【0029】
衛星#1,#2の移動の影響で、観測時間内で到来時間差TDOA及びドップラー周波数差FDOAが大きく時間変動する場合、背景技術に記載している式(13)または式(17)で、受信信号s1(t),s2(t)の相関演算を実施しても、相関が積み上がらないため、シャープな相関ピークが得られない。
そこで、この実施の形態1では、受信信号s1(t),s2(t)を移動補償してから内積値を算出する方法を採用する。
即ち、ある測位位置の候補をpcと仮定し、その候補位置pcを用いて、衛星#1,#2の受信信号s1(t),s2(t)が同じなるように補償し、補償後の受信信号c1(t),c2(t)間の内積値を算出する。
この内積値が高ければ、受信信号間の類似度が高いことを意味するので、候補位置pcが正解であれば、正しく補償ができていることになり、高い内積値が得られる。
【0030】
まず、候補位置設定部1は、電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する。
そして、複数の候補位置pcの中から、未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
【0031】
移動補償量計算部2は、候補位置設定部1から1つの候補位置pcを受けると、その候補位置pcに電波源が存在していると仮定し、衛星#1,#2の軌道情報(衛星#1,#2の3次元位置ベクトルps1,ps2)を用いて、その候補位置pcに存在している電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する。
【0032】
受信信号移動補償部3は、移動補償量計算部2が到来時間τc1(t),τc2(t)を算出すると、その到来時間τc1(t),τc2(t)を用いて、衛星#1,衛星#2により受信された電波に係る受信信号s1(t),s2(t)を補償する。
ここでは、キャリア周波数ωcが未知の場合を仮定する。
ダウンコンバート周波数ωhは既知であるが、ωh≠ωcであるため、キャリア成分が残っている。
そのため、受信信号移動補償部3は、下記の式(27),(28)のように受信信号s1(t),s2(t)を補償して、補償後の受信信号である補償信号c1(t),c2(t)を出力する。
【0033】
内積値計算部4は、受信信号移動補償部3から補償信号c1(t),c2(t)を受けると、その補償信号c1(t)と補償信号c2(t)の類似度を評価するため、下記の式(29)に示すように、補償信号c1(t),c2(t)間の内積値cor(pc)を算出する。
【0034】
このとき、候補位置pcが正解であれば、τc1(t)=τ1(t),τc2(t)=τ2(t)となり、式(27)は、下記の式(30)のように表される。同様に、式(28)は、下記の式(31)のように表される。
この場合、式(29)の内積値は最大値をとる。
【0035】
全候補位置処理終了判定部5は、候補位置設定部1により設定された全ての候補位置pcについて、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理が終了(内積値cor(pc)の算出処理が終了)しているか否かを判定し、全ての候補位置pcについて処理が終了するまで、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理を繰り返し実施させる。
なお、全候補位置処理終了判定部5の指示の下、移動補償量計算部2、受信信号移動補償部3及び内積値計算部4の処理を繰り返し実施する場合、候補位置設定部1が未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
【0036】
測位結果出力部6は、候補位置設定部1により設定された全ての候補位置pcについて、内積値cor(pc)の算出処理が終了すると、候補位置設定部1により設定された全ての候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
なお、アンビギュイティー位置の補償値は、真の補償値と異なるため、アンビギュイティー位置では、相関ピークが立たず、正解の位置でのみ、相関ピークが立つようになる。
よって、アンビギュイティー位置を排除して、正解の位置のみを測位結果として出力することができる。
【0037】
ここまでは、ωh≠ωcである例を説明したが、ωh=ωcである場合、候補位置pcが正解であれば、τc1(t)=τ1(t),τc2(t)=τ2(t)となり、式(30)は下記の式(33)のように表され、式(31)は下記の式(34)のように表される。
また、信号が正弦波である場合、式(30)は下記の式(35)のように表され、式(31)は下記の式(36)のように表される。
また、ωh=ωcであり、かつ、信号が正弦波である場合、式(30)は下記の式(37)のように表され、式(31)は下記の式(38)のように表される。
【0038】
この実施の形態1及び後述する実施の形態に共通する事項として、電波源から送信される信号が連続信号であるものとして説明しているが、実際の信号処理では、A/D変換器によりサンプル化された離散信号を扱うので、それぞれの式を以下のように置き換えて、用いる。
(1)受信信号は、s1(k)=s1(t)|t=Δtk,s2(k)=s2(t)|t=Δtk
というように、サンプル周期Δtで離散的に得られる。
(2)補償信号c1(k),c2(k)を生成する際、離散信号では、サンプルの間の情
報が得られないので、例えば、スプライン補間など、何らかの補間処理を用いる。
(3)内積値を演算する式(29)は、下記の式(39)に置き換える。
実際の処理は、以上を置き換えて行えばよく、式(32)に示す内積値の最大値は、下記の式(40)となる。
【0039】
ただし、以下の点にも留意する必要がある。
(1)式(27)及び式(28)では、図2(a)に示すように、
補償信号c1(t),c2(t)として、TOA及びFOAが零となるような補償を
行っている。
(2)式(27)及び式(28)では、受信信号s1(t),s2(t)から
補償信号c1(t),c2(t)を計算しているが、大事なのは、到来時間τ1(t)
,τ2(t)の差(Δτ12(t)=τ1(t)−τ2(t))のみであるので、
補間処理における時間シフト量を小さく済ませる必要があれば、バイアス成分を除去
して、シフト量を設定すればよい(図2(b)を参照)。
即ち、実際のシフト量は、τ1(t)−b,τ2(t)−bでよい。
(3)式(27)及び式(28)では、受信信号s1(t),s2(t)から
補償信号c1(t),c2(t)を計算しているが、大事なのは、到来時間τ1(t)
,τ2(t)の差(Δτ12(t)=τ1(t)−τ2(t))のみであるので、片方
だけ、Δτ12(t)シフトすればよい(図2(c)を参照)。
例えば、S/Nのより高い信号のみ、補間処理を行えばよい。
【0040】
以上で明らかなように、この実施の形態1によれば、電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する候補位置設定部1と、候補位置設定部1により設定された各々の候補位置pcに電波源が存在しているとして、その電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する移動補償量計算部2と、移動補償量計算部2により算出された到来時間τ1(t),τ2(t)を用いて、衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、受信信号移動補償部3による補償後の受信信号である補償信号c1(t),c2(t)間の内積値cor(pc)を算出する内積値計算部4とを設け、測位結果出力部6が、候補位置設定部1により設定された複数の候補位置pcの中で、内積値計算部4により算出された内積値cor(pc)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力するように構成したので、衛星#1,#2の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができる効果を奏する。
【0041】
なお、この実施の形態1では、2機の衛星#1,#2が電波源から発信された電波を受信するものを示したが、3機以上の衛星が電波源から発信された電波を受信するようにしてもよい。
例えば、3機の衛星#1,#2,#3が電波源から発信された電波を受信する場合、電波が衛星#1,#2,#3に到来する時間τ1(t),τ2(t),τ3(t)を算出するとともに、その到来時間τ1(t),τ2(t),τ3(t)を用いて、衛星#1,#2,#3の受信信号s1(t),s2(t),s3(t)を補償し、補償信号c1(t),c2(t)間の内積値cor1(pc)と、補償信号c2(t),c3(t)間の内積値cor2(pc)と、補償信号c3(t),c1(t)間の内積値cor3(pc)とを算出する。
そして、複数の候補位置pcの中で、例えば、内積値の総和(cor1(pc)+cor2(pc)+cor3(pc))が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力するようにする。
【0042】
実施の形態2.
この実施の形態2の測位装置の構成は、上記実施の形態1の測位装置と同様であるが、移動補償の方法が異なっている。
ここでは、キャリア周波数fcが既知であるとして、受信信号移動補償部3が、そのキャリア周波数fcを用いて、移動補償を行う方法を説明する。
【0043】
以下、衛星#1,#2の受信信号s1(t),s2(t)は、ある周波数帯でωhだけダウンコンバートされているものとする。
【0044】
衛星#1,#2の受信信号s1(t),s2(t)が同じ信号となるように補償すると、補償信号c1(t),c2(t)は、下記の式(43),(44)のようになる。
式(43),(44)では、キャリア周波数ωcが既知であるとして、キャリア成分を除去するためのe-j(ωc-ωd)t項による乗算を加えている。
【0045】
式(43),(44)において、補償項が正しい場合、pc=p0であるため、式(43)は下記の式(45)となり、式(44)は下記の式(46)となる。
この場合、内積値cor(pc)は、下記の式(47)となり、最大値をとる。
【0046】
逆に補償項が正しくない場合、式(29)は低い値をとる。この性質を利用し、電波源の候補位置pcについて、式(43)及び式(44)を計算して内積値cor(pc)を評価し、その内積値cor(pc)が最大になる候補位置pcを測位位置として出力する。
なお、信号が無変調連続波(CW)である場合、式(45),(46)は、下記の式(48),(49)となる。
【0047】
実施の形態3.
図3はこの発明の実施の形態3による測位装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
相関値計算部11は受信信号移動補償部3による補償後の受信信号c1(t),c2(t)間の2次元相関値ccf(τ,f)を算出する処理を実施する。なお、相関値計算部11は2次元相関値算出手段を構成している。
ピーク検出部12は相関値計算部11により算出された2次元相関値ccf(τ,f)が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出する処理を実施する。
【0048】
全候補位置処理終了判定部13は候補位置設定部1により設定された全ての候補位置pcについて、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理が終了しているか否かを判定し、全ての候補位置pcについて処理が終了するまで、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理を繰り返し実施させる。
測位結果出力部14は候補位置設定部1により設定された複数の候補位置pcの中で、ピーク検出部12により検出された到来時間差TDOA及びドップラー周波数差FDOAが最も高い候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する処理を実施する。なお、測位結果出力部14は測位結果出力手段を構成している。
【0049】
図3の例では、測位装置の構成要素である候補位置設定部1、移動補償量計算部2、受信信号移動補償部3、相関値計算部11、ピーク検出部12、全候補位置処理終了判定部13及び測位結果出力部14のそれぞれが専用のハードウェア(例えば、CPUを実装している半導体集積回路、あるいは、ワンチップマイコンなど)で構成されているものを想定しているが、測位装置がコンピュータで構成されていてもよい。
測位装置がコンピュータで構成されている場合、候補位置設定部1、移動補償量計算部2、受信信号移動補償部3、相関値計算部11、ピーク検出部12、全候補位置処理終了判定部13及び測位結果出力部14の処理内容を記述しているプログラムをコンピュータのメモリに格納し、当該コンピュータのCPUが当該メモリに格納されているプログラムを実行するようにすればよい。
【0050】
次に動作について説明する。
候補位置設定部1は、上記実施の形態1と同様に、電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する。
そして、複数の候補位置pcの中から、未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
【0051】
移動補償量計算部2は、候補位置設定部1から1つの候補位置pcを受けると、上記実施の形態1と同様に、その候補位置pcに電波源が存在していると仮定し、衛星#1,#2の軌道情報(衛星#1,#2の3次元位置ベクトルps1,ps2)を用いて、その候補位置pcに存在している電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する(式(25),(26)を参照)。
【0052】
受信信号移動補償部3は、移動補償量計算部2が到来時間τc1(t),τc2(t)を算出すると、上記実施の形態1と同様に、その到来時間τc1(t),τc2(t)を用いて、衛星#1,衛星#2により受信された電波に係る受信信号s1(t),s2(t)を補償して、補償後の受信信号である補償信号c1(t),c2(t)を出力する(式(27),(28)を参照)。
【0053】
相関値計算部11は、受信信号移動補償部3から補償信号c1(t),c2(t)を受けると、下記の式(50)に示すように、その補償信号c1(t),c2(t)間の2次元相関値ccf(τ,f)を算出する。
この2次元相関は、下記の式(51)において、τがTDOA、fがFDOAであるときにピークを有し、その他の場合は、低い値をとる。
よって、相関ピークにおけるτがTDOA、fがFDOAとなる。
【0054】
ピーク検出部12は、相関値計算部11が2次元相関値ccf(τ,f)を算出すると、その2次元相関値ccf(τ,f)が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出する。即ち、相関ピークにおけるτを到来時間差TDOAとして検出し、相関ピークにおけるfをドップラー周波数差FDOAとして検出する。
この実施の形態1では、補償信号c1(t),c2(t)を計算してから、その補償信号c1(t),c2(t)間の2次元相関値ccf(τ,f)を算出して、相関ピークを検出しているが、この場合、相関ピークが原点に立つので、相関ピークを検出することは、上記実施の形態1のように、補償信号c1(t),c2(t)間の内積値を計算することに相当する。
【0055】
全候補位置処理終了判定部13は、候補位置設定部1により設定された全ての候補位置pcについて、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理が終了(相関ピークの検出処理が終了)しているか否かを判定し、全ての候補位置pcについて処理が終了するまで、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理を繰り返し実施させる。
なお、全候補位置処理終了判定部13の指示の下、移動補償量計算部2、受信信号移動補償部3、相関値計算部11及びピーク検出部12の処理を繰り返し実施する場合、候補位置設定部1が未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
【0056】
測位結果出力部14は、候補位置設定部1により設定された全ての候補位置pcについて、相関ピークの検出処理が終了すると、候補位置設定部1により設定された全ての候補位置pcの中で、ピーク検出部12により検出された到来時間差TDOA及びドップラー周波数差FDOAが最も高い候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力する。
なお、アンビギュイティー位置の補償値は、真の補償値と異なるため、アンビギュイティー位置では、相関ピークが立たず、正解の位置でのみ、相関ピークが立つようになる。
よって、アンビギュイティー位置を排除して、正解の位置のみを測位結果として出力することができる。
【0057】
以上で明らかなように、この実施の形態3によれば、電波源が存在している可能性がある地表面(外部から与えられる電波源位置候補範囲が示す領域)をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する候補位置設定部1と、候補位置設定部1により設定された各々の候補位置pcに電波源が存在しているとして、その電波源から発信された電波が衛星#1,#2に到来する時間τc1(t),τc2(t)を算出する移動補償量計算部2と、移動補償量計算部2により算出された到来時間τ1(t),τ2(t)を用いて、衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)を補償する受信信号移動補償部3と、受信信号移動補償部3による補償後の受信信号である補償信号c1(t),c2(t)間の2次元相関値ccf(τ,f)を算出する相関値計算部11と、相関値計算部11により算出された2次元相関値ccf(τ,f)が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出するピーク検出部12とを設け、測位結果出力部14が、候補位置設定部1により設定された複数の候補位置pcの中で、ピーク検出部12により検出された到来時間差TDOA及びドップラー周波数差FDOAが最も高い候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力するように構成したので、衛星#1,#2の高速移動に伴う測位精度の劣化を招くことなく、電波源の正確な位置を測位することができる効果を奏する。
【0058】
なお、この実施の形態3では、2機の衛星#1,#2が電波源から発信された電波を受信するものを示したが、上記実施の形態1と同様に、3機以上の衛星が電波源から発信された電波を受信するようにしてもよい。
例えば、3機の衛星#1,#2,#3が電波源から発信された電波を受信する場合、電波が衛星#1,#2,#3に到来する時間τ1(t),τ2(t),τ3(t)を算出するとともに、その到来時間τ1(t),τ2(t),τ3(t)を用いて、衛星#1,#2,#3の受信信号s1(t),s2(t),s3(t)を補償し、補償信号c1(t),c2(t)間の2次元相関値ccf1(τ,f)が最大となる到来時間差TDOA1及びドップラー周波数差FDOA1、補償信号c2(t),c3(t)間の2次元相関値ccf2(τ,f)が最大となる到来時間差TDOA2及びドップラー周波数差FDOA2、及び補償信号c3(t),c1(t)間の2次元相関値ccf3(τ,f)が最大となる到来時間差TDOA3及びドップラー周波数差FDOA3を検出する。
そして、複数の候補位置pcの中で、例えば、到来時間差TDOA及びドップラー周波数差FDOAの総和(TDOA1+TDOA2+TDOA3,FDOA1+FDOA2+FDOA3)が最大になる候補位置pcを特定し、その候補位置pcを電波源の測位結果として出力するようにする。
【0059】
実施の形態4.
図4はこの発明の実施の形態4による測位装置を示す構成図であり、図において、図1と同一符号は同一または相当部分を示すので説明を省略する。
粗測位部21は衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)と衛星#1,#2の軌道情報を用いて、その受信信号s1(t),s2(t)間の2次元相関値を算出し、2次元相関値のピークを検出することで、電波源が存在している位置の粗測位を実施する。なお、粗測位部21は粗測位手段を構成している。
【0060】
電波源位置候補範囲設定部22は粗測位部21により粗測位された位置の周辺の範囲を電波源位置候補範囲(電波源が存在している可能性がある地表面)に設定し、その電波源位置候補範囲を候補位置設定部1に出力する処理を実施する。
なお、候補位置設定部1及び電波源位置候補範囲設定部22から候補位置設定手段が構成されている。
【0061】
図4では、粗測位部21及び電波源位置候補範囲設定部22が図1の測位装置に適用されている例を示しているが、粗測位部21及び電波源位置候補範囲設定部22が図3の測位装置に適用されていてもよい。
【0062】
次に動作について説明する。
粗測位部21は、衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)と衛星#1,#2の軌道情報を用いて、その受信信号s1(t),s2(t)間の2次元相関値を算出する。即ち、背景技術に記載している式(13)で表される2次元相関値ccf(τ,f)を算出する。
粗測位部21は、2次元相関値ccf(τ,f)を算出すると、その2次元相関値ccf(τ,f)のピークを検出して、2次元相関値ccf(τ,f)が最大となる到来時間差TDOA及びドップラー周波数差FDOAを検出する。
【0063】
粗測位部21は、到来時間差TDOA及びドップラー周波数差FDOAを検出すると、その到来時間差TDOA及びドップラー周波数差FDOAを背景技術に記載している式(5),(6)に代入して、式(5),(6),(7)の連立方程式を電波源の3次元位置ベクトルp0について解くことにより、電波源の3次元位置を粗測位する。
なお、2次元相関値ccf(τ,f)のピークは、上述したように、低い可能性があるが、この2次元相関値ccf(τ,f)から正確な位置を測位するのではなく、電波源位置候補範囲を限定する目的で、3次元位置の粗測位に利用する分には、ピークが立っていれば、測位精度の劣化を招くことはない。
【0064】
電波源位置候補範囲設定部22は、粗測位部21が電波源の3次元位置を粗測位すると、その3次元位置を含む周辺の範囲を電波源位置候補範囲(電波源が存在している可能性がある地表面)に設定し、その電波源位置候補範囲を候補位置設定部1に出力する。
候補位置設定部1は、電波源位置候補範囲設定部22から電波源位置候補範囲を受けると、その電波源位置候補範囲が示す領域をグリッド状に分割し、各分割領域を電波源が存在している可能性がある候補位置pcに設定する。
そして、複数の候補位置pcの中から、未だ選択していない任意の候補位置pcを1つ選択して移動補償量計算部2に出力する。
以下の処理内容は、上記実施の形態1〜3と同様であるため説明を省略する。
【0065】
以上で明らかなように、この実施の形態4によれば、衛星#1,#2により受信された電波に係る受信信号s1(t),s2(t)と衛星#1,#2の軌道情報を用いて、その受信信号s1(t),s2(t)間の2次元相関値を算出し、2次元相関値のピークを検出することで、電波源が存在している位置を粗測位する粗測位部21を設け、電波源位置候補範囲設定部22が、粗測位部21により粗測位された位置の周辺の範囲を電波源位置候補範囲に設定し、その電波源位置候補範囲を候補位置設定部1に出力するように構成したので、電波源の位置の探索範囲が制限されて、測位装置の演算負荷が軽減される効果が得られる。
【0066】
実施の形態5.
上記実施の形態4では、粗測位部21により粗測位された位置の周辺の範囲を電波源位置候補範囲に設定するものを示したが、アンビギュイティーの影響で2次元相関値のピークが複数検出されて、電波源が存在している位置が複数粗測位される場合がある。
このように複数の位置が粗測位される場合、電波源位置候補範囲設定部22が、粗測位部21により粗測位された各位置の周辺の範囲をそれぞれ電波源位置候補範囲に設定するようにする。
この場合、候補位置設定部1は、電波源位置候補範囲設定部22により設定された複数の電波源位置候補範囲が示す領域をそれぞれグリッド状に分割し、それぞれの各分割領域を電波源が存在している可能性がある候補位置pcに設定する。
これにより、上記実施の形態4よりも、電波源の位置の探索範囲が広がってしまうが、上記実施の形態1〜3よりは、電波源の位置の探索範囲を制限することができる。また、アンビギュイティー位置を排除することができる。
【0067】
なお、本願発明はその発明の範囲内において、各実施の形態の自由な組み合わせ、あるいは各実施の形態の任意の構成要素の変形、もしくは各実施の形態において任意の構成要素の省略が可能である。
【符号の説明】
【0068】
1 候補位置設定部(候補位置設定手段)、2 移動補償量計算部(到来時間算出手段)、3 受信信号移動補償部(受信信号補償手段)、4 内積値計算部(内積値算出手段)、5 全候補位置処理終了判定部、6 測位結果出力部(測位結果出力手段)、11 相関値計算部(2次元相関値算出手段)、12 ピーク検出部、13 全候補位置処理終了判定部、14 測位結果出力部(測位結果出力手段)、21 粗測位部(粗測位手段)、22 電波源位置候補範囲設定部(候補位置設定手段)、51 相関値計算部、52 ピーク検出部、53 測位部。
【特許請求の範囲】
【請求項1】
位置が未知の電波源が存在している可能性がある複数の候補位置を設定する候補位置設定手段と、上記候補位置設定手段により設定された各々の候補位置に上記電波源が存在しているとして、上記電波源から発信された電波が複数の衛星に到来する時間を算出する到来時間算出手段と、上記到来時間算出手段により算出された到来時間を用いて、上記複数の衛星により受信された電波に係る受信信号を補償する受信信号補償手段と、上記受信信号補償手段により補償された複数の受信信号間の内積値を算出する内積値算出手段と、上記候補位置設定手段により設定された複数の候補位置の中で、上記内積値算出手段により算出された内積値が最大になる候補位置を特定し、上記候補位置を上記電波源の測位結果として出力する測位結果出力手段とを備えた測位装置。
【請求項2】
位置が未知の電波源が存在している可能性がある複数の候補位置を設定する候補位置設定手段と、上記候補位置設定手段により設定された各々の候補位置に上記電波源が存在しているとして、上記電波源から発信された電波が複数の衛星に到来する時間を算出する到来時間算出手段と、上記到来時間算出手段により算出された到来時間を用いて、上記複数の衛星により受信された電波に係る受信信号を補償する受信信号補償手段と、上記受信信号補償手段により補償された複数の受信信号間の2次元相関値を算出する2次元相関値算出手段と、上記候補位置設定手段により設定された複数の候補位置の中で、上記2次元相関値算出手段により算出された2次元相関値が最大になる候補位置を特定し、上記候補位置を上記電波源の測位結果として出力する測位結果出力手段とを備えた測位装置。
【請求項3】
複数の衛星により受信された電波に係る受信信号と衛星の軌道情報を用いて、複数の受信信号間の2次元相関値を算出し、上記2次元相関値のピークを検出することで、電波源が存在している位置を粗測位する粗測位手段を設け、
候補位置設定手段は、上記粗測位手段により粗測位された位置の周辺の領域を分割して、各分割領域を上記電波源が存在している可能性がある複数の候補位置に設定することを特徴とする請求項1または請求項2記載の測位装置。
【請求項4】
アンビギュイティーの影響で2次元相関値のピークが複数検出されて、粗測位手段により電波源が存在している位置が複数粗測位された場合、
候補位置設定手段は、上記粗測位手段により粗測位された複数の位置の周辺の領域をそれぞれ分割して、それぞれの各分割領域を上記電波源が存在している可能性がある複数の候補位置に設定することを特徴とする請求項3記載の測位装置。
【請求項1】
位置が未知の電波源が存在している可能性がある複数の候補位置を設定する候補位置設定手段と、上記候補位置設定手段により設定された各々の候補位置に上記電波源が存在しているとして、上記電波源から発信された電波が複数の衛星に到来する時間を算出する到来時間算出手段と、上記到来時間算出手段により算出された到来時間を用いて、上記複数の衛星により受信された電波に係る受信信号を補償する受信信号補償手段と、上記受信信号補償手段により補償された複数の受信信号間の内積値を算出する内積値算出手段と、上記候補位置設定手段により設定された複数の候補位置の中で、上記内積値算出手段により算出された内積値が最大になる候補位置を特定し、上記候補位置を上記電波源の測位結果として出力する測位結果出力手段とを備えた測位装置。
【請求項2】
位置が未知の電波源が存在している可能性がある複数の候補位置を設定する候補位置設定手段と、上記候補位置設定手段により設定された各々の候補位置に上記電波源が存在しているとして、上記電波源から発信された電波が複数の衛星に到来する時間を算出する到来時間算出手段と、上記到来時間算出手段により算出された到来時間を用いて、上記複数の衛星により受信された電波に係る受信信号を補償する受信信号補償手段と、上記受信信号補償手段により補償された複数の受信信号間の2次元相関値を算出する2次元相関値算出手段と、上記候補位置設定手段により設定された複数の候補位置の中で、上記2次元相関値算出手段により算出された2次元相関値が最大になる候補位置を特定し、上記候補位置を上記電波源の測位結果として出力する測位結果出力手段とを備えた測位装置。
【請求項3】
複数の衛星により受信された電波に係る受信信号と衛星の軌道情報を用いて、複数の受信信号間の2次元相関値を算出し、上記2次元相関値のピークを検出することで、電波源が存在している位置を粗測位する粗測位手段を設け、
候補位置設定手段は、上記粗測位手段により粗測位された位置の周辺の領域を分割して、各分割領域を上記電波源が存在している可能性がある複数の候補位置に設定することを特徴とする請求項1または請求項2記載の測位装置。
【請求項4】
アンビギュイティーの影響で2次元相関値のピークが複数検出されて、粗測位手段により電波源が存在している位置が複数粗測位された場合、
候補位置設定手段は、上記粗測位手段により粗測位された複数の位置の周辺の領域をそれぞれ分割して、それぞれの各分割領域を上記電波源が存在している可能性がある複数の候補位置に設定することを特徴とする請求項3記載の測位装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−29419(P2013−29419A)
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願番号】特願2011−165572(P2011−165572)
【出願日】平成23年7月28日(2011.7.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年2月7日(2013.2.7)
【国際特許分類】
【出願日】平成23年7月28日(2011.7.28)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]