
測地参照データベースを生成する方法
測地参照データベースを生成する方法が開示される。方法は、地表を走行する車両に取り付けられたデジタルカメラ、レンジセンサ、並びにGPS及びIMUを含む位置判定手段により取り込まれたモバイルマッピングデータを取得するステップを含む。モバイルマッピングデータは、同時に取り込まれた画像データ、レンジデータ及び地理座標系における関連する位置データを含む。線形静止地表特徴は、画像データ、レンジデータ及び関連する位置データを処理することによりモバイルマッピングデータから導出される。3Dモデルは、画像データ、レンジデータ及び関連する位置データから地理座標系における線形静止地表特徴に対して生成され、測地参照データベースを取得するためにデータベースに格納される。3Dモデルは、3Dモデルの表面の色を表す画像又はモデルに沿う写真識別可能なオブジェクトを表すより小さい画像の集合を含んでもよい。3Dモデルは、空中画像を補正するため、数値標高モデルを修正するため及び数値標高モデルの三角形分割を向上するために使用されてもよい。

【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測地参照データベースを生成する分野に関する。
【0002】
更に本発明は、測地参照データベースを生成するコンピュータにより実現されるシステム、測地参照データベース、コンピュータプログラム、並びにコンピュータプログラム又は測地参照データベースを備えるプロセッサ可読媒体に関する。測地参照データベースは、同一の地理的領域の異なる画像をオルソ補正する際に有用である。
【背景技術】
【0003】
地上基準点(GCP:Ground Control Points)は、衛星画像、空中画像又は航空測量画像を標準的な地図投影にオルソ補正する際に使用される。地上基準点は、遠隔検知された画像、地図又は空中写真上で認識可能であり且つそれらの各々において正確に配置可能である地表上の何らかの点であってもよい。地上基準点は、座標参照系における既定の関連座標を有する。地上基準点は、既知の場所の地表上の点である(すなわち、確立された座標参照系内で固定される)。GCPは、遠隔検知された画像又は走査された地図等の画像データソース及び地理物理学的測量中に生成される分離された測量格子を地理参照するために使用される。GCPは以下のいずれであってもよい。
・選択点及びその周辺を示す紙の地図の一部のコピー
・選択点及びその周辺を示す走査された地図からの画像チップ
・選択点及びその周辺を示すデジタル地図からの画像チップ
・選択点の文書による記述又はスケッチ
・選択点及びその周辺を示す空中/衛星写真又は地上写真からの画像
・空中/衛星画像又は平面地図において認識可能であるように文書化された適切な特定の場所の他の何らかの表現。
【0004】
GCPは、座標参照系における関連する正確なX、Y及びZ座標を有する1つの点を識別するための何らかの写真認識可能な特徴であってもよい。GCPは、衛星又は空中画像において明確に識別可能な地表特徴を記述する。GCPの最も重要な条件は、オルソ補正される画像における視認性である。第2の特徴は耐久性である。理想的には、GCPはオルソ補正される画像における画素の少なくとも4倍のサイズを有する必要がある。GCPを定義するために使用される地表特徴は、文化的特徴、線特徴及び自然特徴であってもよい。
【0005】
通常、文化的(人工)特徴はGCPとして使用するのに最適な点である。それは、道路の交点、道路及び線路の交点、道路及び森林と農地との間の境界線の交点等の道路及び可視である生物地理学的境界の交点、交差点、河川橋、大きな低層の建物(格納庫、工業用建物等)、空港等を範囲に含む。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本出願において、線特徴は、画像において明確に定義されたエッジを有する場合に使用されてもよい。通常、GCPは2つの線特徴の交点の中心として選択される。交点を形成する2つの線特徴は、60度より大きい角度で交差する必要がある。
【0007】
一般に、自然特徴は形状が不規則であるため好ましくない。しかし、適切な文化的特徴が存在しない領域においては自然特徴を使用する必要がある。自然特徴が明確に定義されたエッジを有する場合、それはGCPとして使用されてもよい。それは、森林の境界、森林の小道、森林内の開墾地、河川の合流点等であってもよい。そのような点を選択する場合、特定の境界(森林、水塊)はいずれ変化する可能性があることを考慮する必要がある。適切な特徴が不十分である状況において、測量士はGCPを識別するために観測可能な特徴を作成できる。
【0008】
空中又は衛星画像を地理参照又は補正するために、画像毎にGCPの集合を選択する必要がある。集合のGCPは、画像において均一に選択される必要がある。好ましくは画像において均等な分布で画像のエッジ付近の点を選択する必要がある。また、GCPの集合は、シーンにおける地形の変化を更に考慮するのが好ましい。すなわち、標高が最も高い点及び最も低い点の双方を選択するのが好ましい。
【0009】
GCPは、人間が現地に赴き、GCPの画像又は対応する記述、並びに、例えば、GPS受信機の位置判定手段により座標参照系における対応するX、Y及びZ座標の双方を収集することにより生成されてもよい。Jed Gregory他による「Accurate mapping of Ground Control Point for Image Rectification and Holistic Planned Grazing Preparation」、GIS Training and Research Center、Idaho State University Pocatello、ID 83209−8130、2006年10月において、画像の正確な地理補正を保証するために、GCPを確立し且つそれらの正確な空間的配置を記録する必要があった。GCPは、地理補正される領域全体にわたり戦略的に設定された。GCPは、十字(+)の形状に重ね合わせた幅6インチ及び長さ6フィートの2つのプラスチックの薄板を使用して設定された。全てのGCPは、十字の各辺が4方位(北、南、東、西)のうちの1つを指すように方向付けられた。各GCPの配置後、GPSの場所がTrimble GeoXT GPSユニットを使用して十字の中心において記録された。前記文献は、正確なGCPを収集するために必要な膨大な時間及び労力を不要にする。
【0010】
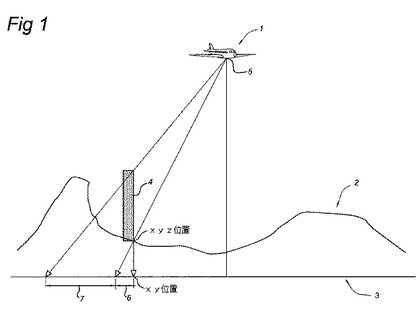
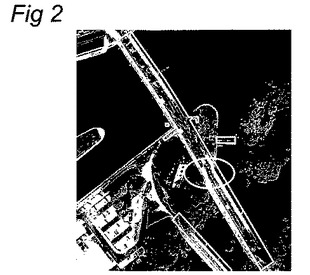
基本的には、オルソ補正処理において行われる2つの修正が存在する。オルソ補正は、各画素が地表を記述するジオイド上の既知のXY位置を有し且つ各画素が前記XY位置において地表に対して垂直視されると考えられる画像に透視投影画像を変換することである。最初に何らかの偏移(平行移動及び回転誤差)、傾き又は変倍の問題が修正され、次に標高の変化による歪み現象が修正される。画像に適用される現在のオルソ補正処理において、標高の歪みは水平誤差の主要な原因である。これを図1に示す。航空機1に取り付けられたカメラは、地表2(図1では断面で示す)の透視投影画像を記録する。しかし、画像内の1つの画素のみが地表を垂直視した図を表すことができ、他の全ての画素は地表を斜めから見た図を表す。図1は、所定のy座標に対する地表の断面を示す。水平な線3は、例えばWGS84である座標参照系における所定のy座標に対する地球の基準面又は座標参照系における地表を記述する他の何らかのジオイドの断面を表すと仮定される。地表2におけるxyz位置及び高さが既知である地表上の例えば橋である建造物4が示される。更に、空中画像の取り込み点5の座標参照系における位置及び姿勢は既知である(例えば、正確なGPS及び/又は他の位置/姿勢判定手段により)。幾何学により、建造物の上側の画素及び対応するxy位置を判定できる。しかし、基準面3に対する地表の高さ、すなわちz座標が既知ではない場合、第1の地形誘引誤差6がオルソ画像において発生する。同様に、建造物の高さも既知ではない場合、建造物の高さに誘引される更なる誤差7が最終オルソ画像において発生する。その場合、上側又は建造物はオルソ画像において正確なxy位置から数メートル離れて投影される場合がある。建造物が橋である例において、基準面に対する標高情報が(正確に)わからない場合、橋上の道路は不正確に投影される。図2は、この種の誤差を示す。
【0011】
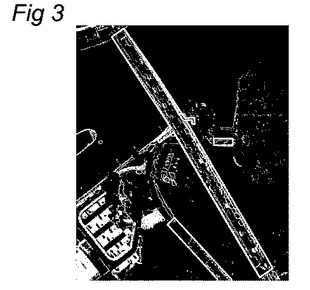
図2は、数値標高モデル(DEM)が空中画像をオルソ補正するために使用されるオルソ画像を示す。DEMは「裸の地球」と呼ばれることが多く、下層の地形を露呈することで数値表面モデルDSMに伴う全ての文化的特徴及び生物地理学的特徴をデジタル処理で除去することにより作成される。DSMは、座標参照系における場所及び標高情報の双方を含む地球の第1表面図である。DEMは、ラスタ(複数の正方形から成る格子)、等値線又は等高線の集合、あるいは不規則三角メッシュ網として表されてもよい。USGS 10m National Elevation Data Set(NED)はコスト効率の高い利用可能なDEMであるが、図2に示すように橋、建物及び高架構造物を正確にオルソ補正できない。橋の高さを考慮しないことにより、橋の上側は橋の実際の場所に対して移動される。オルソ画像に重ね合わせた白線により図2における橋の実際の場所を示す。図3は、正確にジオコーディングされたDSMが空中画像をオルソ補正するために使用されるオルソ画像を示す。建造物の正確な高さを使用することにより、建造物がオルソ画像空間上に正確に投影されることがわかる。建造物の輪郭を示す白線がオルソ画像において見られる輪郭と一致する場合、建造物は正確に投影される。
【0012】
尚、DEM及びDSMの双方は地表のモデルのみを提供する。それらは、検知された画像、地図及び空中写真上で容易に認識可能な情報を含まない。GCPがDEM又はDSMに関連付けられない場合、そのような画像をオルソ補正するためにGCPを使用できない。使用されるGCPの精度、GCPの数(総数)及び補正される画像にわたる分布/密度は、結果として得られる画像又はオルソ補正処理の精度を判定する。基礎となる標高の変化の特徴は、必要なGCPの分布/密度を判定する。例えばKansasの平坦部は、平坦部のエッジにおけるいくつかのGCPのみを必要とする。小川に架かる小さい橋は多くのGCPを必要としない。大渓谷に架かる巨大な橋は、橋のエッジを正確に記述するために密度の高いGCPを必要とする場合がある。同様に、起伏のある丘陵地は平坦地より多くのGCPを必要とする。
【0013】
多くの場合、地理情報システムはデジタル地図情報及びオルソ画像の双方を1つのビューにおいて組み合わせる。デジタル地図情報に追加するか、あるいはデジタル地図情報を修正又は検査するために、画像からの情報が抽出又は解析されてもよい。同様に、オルソ画像は、ナビゲーション装置において使用するためのデジタル地図情報を抽出するために使用されてもよい。双方の状況において、オルソ画像における特徴の場所が地上での実際の場所に対応することが重要である。最初の例において、高さが不正確であるため、オルソ画像における路面の位置はデジタル地図から得られる対応する路面と一致しない。例えば図2を参照。この場合、ナビゲーション装置は、不適切にオルソ補正された画像から抽出された自身の地図データベースにおける位置と異なる位置を測定する可能性があり、ナビゲーション装置のユーザに危険な走行状態を誤って通知する警報を提供する可能性がある。
【0014】
空中画像又は衛星画像から正確なオルソ画像を生成するための条件は、充分なGCPがオルソ画像により表される領域内に存在することである。現在、オルソ補正のコストは人間により取り込まれるGCPの数に比例して増加する。オルソ画像の必要な精度を得るために必要とされるGCPが増加するほど、より多くの人的労力が必要とされる。
【0015】
位置が正確なナビゲーション及びマッピングアプリケーションの制御を補助する安価で正確であり(精度が既知であり)且つ適切に分布する地上基準点は不足している。更に、先進運転支援システム(ADAS)は、そのようなシステムを制御するために道路に関する正確な3D位置情報を必要とする。これは、空中又は衛星画像を充分に正確に補正するために路面に沿うGCPの非常に密なネットワークを必要とする。これらのアプリケーションの場合、路面がオルソ画像において正確に位置決めされることが重要である。そのためには、路面に関する標高情報が必要とされ、特に、橋、堤防、高架幹線道路及び高架道路に関する路面情報が必要とされる。
【0016】
ジオ空間画像を校正及び補正するための地上基準製品の現状は、地球のほぼ全ての領域においてまばらであり且つ一貫性がない。以下のデータソースがジオ空間データの校正及び補正のために存在する。
【0017】
a)政府の地勢データセットから導出されたDEM/DTMデータ。しかし、これらのデータは精度が低く且つ古い場合が多い。更に、それらの品質は領域により大幅に異なる。
【0018】
b)航空機搭載/衛星レーダプラットフォームから導出されたDEM/DTM。これらは高価であり、多くの民間マッピング企業が興味を示さない広大な領域を範囲に含むことが多い。更に、これらは独自の正確なソースからの位置校正を依然として必要とする。現在、衛星プラットフォームはADASレベルの動作に対する精度条件を一貫して満たすデータを提供しない。
【0019】
c)高品質な測量グレードのGPSの地上基準点。これらは、1つの点当りのコストが高く、いくつかの国においては取得するために特別な許可を必要とする。更に、繰り返し実行する機会が極めて少ない。
【0020】
d)低品質なGPSの地上基準点(特定の目的向け/非測量グレード)。これらは、写真識別が不可能な場合が多く、すぐに使われなくなると考えられる。測地メタデータは、一貫性がなく且つ明確に定義されない場合がある。更に、点の場所は一般に適切に計画されていない。
【0021】
e)車両からのGPSの「軌道線」。これらは写真識別がほぼ不可能であり、車道の幅より高い精度を提供しない。第1に、それらを他の軌道線と相関させることは困難であり、特に交差点における微妙な走行パターンに基づいて異なる位置を与えるため、交通ノードを相関させられない。
【0022】
f)既存の空中画像製品。これらは、低品質の出力を検査/補正するのに有用であってもよい。しかし、ジオ空間データの生成において、これらは適切ではない。更に、これらは2D画像において容易に検出できない多くの局所誤差を有する。
【0023】
g)既存の政府又は民間のセンターライン地図。これらの地図は、抽象モデル化規格又はセンターラインデータである。そのようなデータ集合の精度プロファイルは一貫性がなく、標高データの品質が不十分である。
【0024】
少なくとも路面に適用する場合にGIS応用例に対する信頼性の高いデータソースとして測地参照データベースを使用するために、3次元における充分な精度で空中又は衛星画像をオルソ補正するための充分なGCP又は地上基準情報を含む測地参照データベースが必要とされる。
【0025】
本発明は、画像のオルソ補正、ベースマッピング、場所に基づくシステム、3D視覚化、地形マッピング、車両ナビゲーション、高度車両システム、ADAS、フライトシミュレーション、操縦室における状況認識等の多くのGIS応用例において使用されてもよい測地参照データベースを生成する代替の方法を提供することを目的とする。
【課題を解決するための手段】
【0026】
本発明によると、方法は、
地表を走行する車両に取り付けられたデジタルカメラ、レンジセンサ、並びにGPS及びIMUを含む位置判定手段により取り込まれ且つ同時に取り込まれた画像データ、レンジデータ及び地理座標系における関連する位置データを含むモバイルマッピングデータを取得するステップと、
画像データ、レンジデータ及び関連する位置データを処理することによりモバイルマッピングデータから線形静止地表特徴を判定するステップと、
画像データ、レンジデータ及び関連する位置データから地理座標系における線形静止地表特徴に対する3Dモデルを生成するステップと、
測地参照データベースを取得するためにデータベースに3Dモデルを格納するステップとを含む。
【0027】
本発明は、検知された空中画像及び衛星画像を正確にオルソ補正するためには位置が正確な地表の3Dモデルが必要であるという認識に基づく。更に、検知された画像と3Dモデルとの関係が判定される必要がある。DSM及びDEM等の現在の3Dモデルは、3D座標に関して地表を記述する。これらの3D座標は、上方から見た場合の地表に対応する関連する色値を有さない。従って、3Dモデル及び検知された画像を位置合わせできない。更に、市販の画像は画素サイズが5.0mであり、水平精度RSMEが2.0mであり、垂直精度RMSEが1.0mである。これらの解像度及び精度は、オルソ補正処理による更に精度の高いオルソ画像の生成を制限する。
【0028】
モバイルマッピング車両は、道路に基づく地表を走行する車両に取り付けられたデジタルカメラ、レーザ/レーダセンサ等のレンジセンサ、並びにGPS及びIMUを含む位置判定手段により取り込まれ且つ同時に取り込まれた画像データ、レーザ/レーダデータ及び地理座標系における関連する位置データを含むモバイルマッピングデータを取り込む。位置判定手段により、50cmの絶対水平精度及び1.5mの垂直精度で位置を判定できる。判定された関連する位置データと組み合わせたレーザ/レーダセンサにより、100mに対して50cmの相対水平精度及び100mに対して35cmの相対垂直精度で表面モデルを作成できる。より適切なハードウェア、すなわち更に密なレーザ群を提供する更に高速のレンジセンサを用いる場合、1cmの精度が達成可能である。
【0029】
モバイルマッピングデータの画像から線形静止地表特徴を判定できる。線形静止地表特徴は、道路区分、橋の上側、高架等であってもよい。本発明に係る線形静止地表特徴の特徴は、視覚的に検出可能なエッジ及び平滑な表面、すなわち不連続ではない表面を有するため表面がエッジ間の平坦面により近似可能であることである。これにより、地表特徴の平坦な表面の左側及び右側に対応する2つのポリラインにより線形地表特徴を記述する3Dモデルを使用できる。
【0030】
表面モデルは、画素サイズが2cmであり且つ100mに対する相対水平精度が50cmである地表のオルソ画像に画像データを変換するために使用されてもよい。表面モデルから得られる高さ情報は、100mに対して35cmの相対垂直精度を有する3Dオルソ画像を取得するためにオルソ画像の各画素に追加されてもよい。線形静止地表特徴、あるいは路面等の地上基準オブジェクトGCOが画像データから抽出され、画像のオルソ補正用データベースに3Dモデルとして格納されてもよい。静止地表特徴の特徴は、形状及びサイズを有するため、補正される画像において認識及び識別されることである。
【0031】
本発明に係る3D表面モデルの別の利点は、3Dモデルが表面及びエッジの双方を定義することである。エッジは、既存のDTM及びDSMの品質を向上するのに有用である。エッジを使用することにより、DEMの通常の格子パターンに限定されない位置に表面モデルにおける切断線を配置できる。表面モデルにおいて、現実の最適な近似を提供するために4つの隣接する測量点を三角形分割する方法は明確ではない。4つの点の三角形分割には、各々が異なる表面を定義する2つの可能な結果が存在する。ドロネー三角形分割において、三角形分割における三角形の全ての角度のうちの最小角が最大にされる結果が選択される。しかし、この結果は必ずしも現実の表面を表すのに最適な結果ではない。本発明に係る線形静止地表特徴の3Dモデル、すなわちエッジは、三角形分割を制御するための切断線として使用されてもよく、すなわち現実を最適に近似する4つの測量点の三角形分割の結果を選択するための切断線として使用されてもよい。3Dモデルは、GIS応用例においてそのような表面モデルを使用する場合又は空中画像を補正するために表面モデルを使用する場合に品質及び信頼性を向上するために既存のDTM又はDSMにおける更なる測量点として更に使用されてもよい。
【0032】
座標参照系における3Dモデルの位置情報が正確に既知であるため、画像の対応部分は正確に補正される。本発明により、GCOとして使用されてもよい大量の3Dモデルを容易に且つ短期間で生成できる。GCPを用いるデータベースより3Dモデルが有利である点は、3Dモデルが地表の一部をモデル化するのに対して、GCPが1つのXYZ座標のみを示す点である。GCPを用いるデータベースを使用する場合、GCP間の場所の標高情報を推測する必要があり、その結果、マッピングが不正確になる場合がある。方法は、地表の3Dモデルの取り込みを補助する。これらの点オブジェクトは、人間が地表を測定し且つモデル化するための標準的な測量方法を使用して手動でのみ収集されてもよく、それにより図2に示すような誤差を修正する。
【0033】
本発明に係る方法は、3つの分野、すなわち正確な位置判定、高解像度レーザ/レーダ又は地上ライダデータの処理及び高解像度画像の処理のうち最適なものを組み合わせる。レーザ/レーダデータ及び画像データの双方は、記録された表面からの距離が空中画像と比較して相対的に近い位置で取り込まれたデータを表すため、解像度及び精度が高い。そのため、より安価なデジタルカメラ及びレーザセンサを使用できる。
【0034】
線形静止地表特徴は、道路区分の路面、水路、陸橋等の明確に定義されたエッジを有する何らかの物理的特徴、橋、モバイルマッピングデータから3Dモデルを導出可能であり且つ空中又は衛星画像において写真識別可能な建造物の基線のうちの少なくとも1つを含むグループから選択された地球の表面における何らかの物理的視覚的線形特徴であってもよい。
【0035】
更なる一実施形態において、道路区分に対応する3Dモデルは連続線形基準ネットワークを取得するために連結され、連続線形基準ネットワークは測地参照データベースに格納される。連続線形基準ネットワークは地表の連続するシームレスな3Dモデルを提供し、これにより、道路区分に対応する画像領域を正確に補正できる。道路網は世界の大部分に沿って延在するため、本発明により、世界のほぼ全域の空中画像及び衛星画像をより正確に補正するために使用されてもよい正確な道路標高モデルを生成できる。特に、連続線形基準ネットワークにより画像内の道路のオルソ補正を大幅に向上できる。連続線形基準ネットワークは、市販のDSM及びDEMより最大で5倍高い解像度を有する道路及び道路構造の表面の非常に正確なDEM又はDSMを提供する。
【0036】
一実施形態において、線形静止地表特徴は、道路のセンターライン、道路の左エッジ、道路の右エッジ、道路の幅を含む特徴のグループから選択された道路区分の線形特徴に対応する。これらの特徴は、3Dモデルを記述するために使用される。3Dモデルは、道路のセンターライン、道路の左エッジ又は道路の右エッジであってもよく、オプションとしてそれらは道路の幅と組み合わされてもよい。路面を記述する3Dモデルは、道路の左エッジ及び道路の右エッジに基づいてもよい。3Dモデルは、空中又は衛星画像において識別されてもよい道路の形状を記述する。3Dモデルは、画像において識別可能な道路のエッジ及び線形塗装に対応するのが好ましい。3Dモデルに関連付けられた座標は、画像を補正するために使用可能である。更に、3Dモデルが表面、すなわち標高の偏差を正確に記述する場合、3Dモデルに対応する画像内の領域は非常に正確に補正可能である。更に、3DモデルはDTMの改良/向上に使用されてもよい。
【0037】
本発明の一実施形態において、線形静止地表特徴を判定する処理は、画像データにおいて路面を検出するステップと、画像データ、レンジデータ及び関連する位置データを組み合わせることにより地理座標系における路面のエッジ及びそれに関連する線形塗装の位置を抽出するステップと、路面の位置から線形静止地表特徴を算出するステップとを含む。3Dモデルは、座標参照系における線形静止地表特徴の大きさ及び位置を記述するベクトルに基づいてもよい。これは、空間構造を記述する効率的な方法である。
【0038】
一実施形態において、方法は、
画像データ及びレンジデータを組み合わせることにより3Dモデルに対するオルソ画像を生成するステップと、
オルソ画像の各画素に対して地理座標系における標高情報を判定するステップと、
3Dオルソ画像を取得するためにオルソ画像と標高情報とをリンクするステップと、
3Dオルソ画像を格納し且つ測地データベース内の各3Dモデルに画像をリンクするステップとを更に含む。これらの特徴により、3Dモデルの地表の可視特徴を用いて3Dモデルを向上できる。特徴は、3Dモデルの領域内の特定の点に関連する更なる正確な地上基準情報を提供する。可視特徴は静止地表特徴でもある。静止地表特徴又は道路区分の例は、「直前の『一時停止』の警告」等の道路標示、停止線、誘導矢印、横断歩道、幹線道路の出口における狭くなる道路のエッジライン、斜線標示、逆V字形標示等である。これらの道路標示は、補正される画像において対応する道路標示を検出するために使用可能な更なる地上基準情報として使用可能である。例えば3Dモデルにより表される長い直線道路区分は、3Dオルソ画像を用いずに道路区分の始点、終点及び経路に関する位置情報を提供する。道路が直線であるため、3Dモデルは補正される画像において道路区分に沿う画素の位置を検査するための道路区分に沿う充分な地上基準情報を提供しない。路面及び/又は道路標示を視覚化する3Dオルソ画像により、双方のソースから得られる写真識するために3Dオルソ画像に関連付けられた位置情報を使用する補正処理が可能になる。更に3Dオルソ画像により、道路標示の画像を用いることで、ナビゲーション及びマッピングアプリケーションの位置精度を向上するための適切に分布する地上基準点のネットワークを有することができる。本実施形態において、3Dモデルは、3Dモデルのオルソ補正された表面領域全体の色を表す1つの画像、オルソ画像のモザイク又はモデルに沿う写真識別可能なオブジェクトを表すより小さいオルソ画像の集合を含むことができる。
【0039】
本発明の更なる目的は、地上基準データベースに格納される内容をコンピュータにより実現されるシステムに生成させる方法を提供することである。
【0040】
本発明の更なる目的は、数値標高モデルの地理座標を修正する方法を提供することである。
【0041】
本発明の更なる目的は、空中又は衛星画像を補正する方法であって、
空中又は衛星画像を取得するステップと、
3Dモデルを含む測地参照データベースを取得するステップと、
測地参照データベースから1つ以上の3Dモデル及び対応する座標を検索するステップと、
画像において1つ以上の3Dモデルが空中又は衛星画像とマッチングする場所を見つけるステップと、
空中又は衛星画像を補正するために座標参照系における3Dモデルの位置を使用するステップとを含む方法を提供することである。例えば、道路区分の3Dモデルが地上基準点の集合より詳細且つ広範囲に地表を記述するため、3Dモデルにより補正処理を向上できる。方法は、オルソ補正された空中又は衛星画像を検査するため及びマッチングするが座標参照系において異なる座標を有する画像の部分を補正するために更に使用されてもよく、すなわちそのような部分を修正するために使用されてもよい。
【図面の簡単な説明】
【0042】
【図1】オルソ補正処理における歪みの原因を概略的に示す図である。
【図2】DEMを使用したオルソ画像を示す図である。
【図3】DSMを使用したオルソ画像を示す図である。
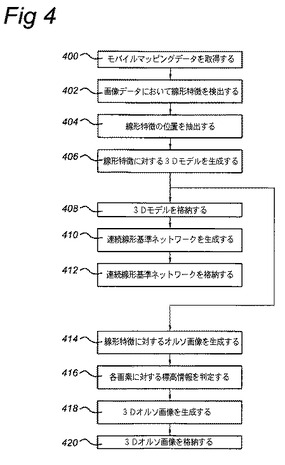
【図4】本発明に係る方法を示すフローチャートである。
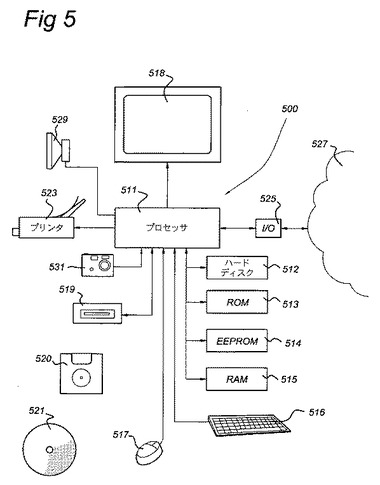
【図5】本発明に係る方法を実現するコンピュータシステムの一例を示すブロック図である。
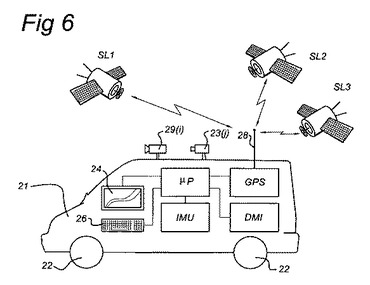
【図6】カメラ及びレーザスキャナを有するMMSシステムを示す図である。
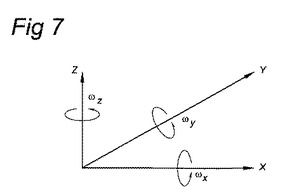
【図7】場所及び姿勢パラメータを示す図である。
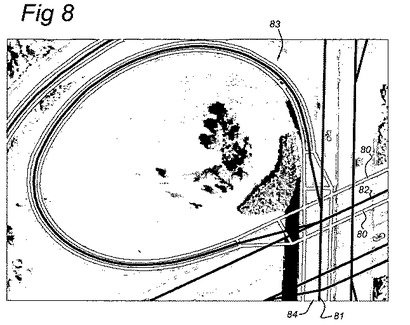
【図8】線形静止路面特徴の例を示す図である。
【図9】線形静止路面特徴をモデル化するための道路の特徴を示す図である。
【図10】更なる地上基準情報の例を示す図である。
【図11】空中又は衛星画像を補正する方法を示すフローチャートである。
【図12】DEMを修正する方法を示すフローチャートである。
【発明を実施するための形態】
【0043】
多くの好適な実施形態を使用し且つ添付の図面を参照して、本発明を以下により詳細に説明する。
【0044】
図4は、本発明に係る方法を概略的に示すフローチャートである。方法は動作400から開始し、モバイルマッピングデータを取得する。モバイルマッピングデータは、地表を走行する車両に取り付けられたデジタルカメラ、例えば、レーザスキャナであるレーザセンサ、並びにGPS及びIMUを含む位置判定手段により取り込まれ、同時に取り込まれた画像データ、レーザデータ及び地理座標系における関連する位置データを含む。モバイルマッピングデータを収集するための位置判定手段、レーザセンサ及びデジタルカメラを備える車両はモバイルマッピングシステムMMSと呼ばれる。位置判定手段は、少なくとも座標参照系における車両の位置を判定し且つオプションで車両の姿勢を判定するように構成される。尚、3Dモデル又は3D画像を生成するために使用可能なデータを取り込むために、レーザセンサの代わりにレイダ、ライダ及びレーダ等の他の何らかのレンジセンサが使用されてもよい。原則的に、データが6自由度の関連する正確な位置及び姿勢データを含む限り、どんな画像データ及びレンジデータが使用されてもよい。
【0045】
図6は、自動車20の形態をとるMMSシステムを示す。自動車20は、1つ以上のカメラ29(i)及び1つ以上のレーザスキャナ23(j)を備える。i=1、2、3、...Iであり、j=1、2、3、...Jである。1つ以上のカメラ29(i)の画角は、自動車21の走行方向に対してどの方向にあってもよく、従って、前方観察用カメラ、側方観察用カメラ又は後方観察用カメラ等であってもよい。カメラ29(i)の観察ウィンドウは車両前方の路面全体を範囲に含む。自動車21の走行方向とカメラの画角との間の角度は、両側において−45度〜+45度の範囲内にあるのが好ましい。自動車21は、運転者により関心道路に沿って運転される。
【0046】
自動車21は複数の車輪22を備える。更に、自動車21は高精度位置判定装置を備える。図6に示すように、位置判定装置は以下の構成要素を備える。
・アンテナ28に接続され、複数の衛星SLi(i=1、2、3、...)と通信し且つ衛星SLiから受信した信号から位置信号を算出するように構成されたGPS(全地球測位システム)ユニット。GPSユニットはマイクロプロセッサμPに接続される。GPSユニットから受信した信号に基づいて、マイクロプロセッサμPは、自動車1内のモニタ24に表示され且つ運転者に自動車が位置する場所及び場合によっては自動車が移動している方向を通知する適切な表示信号を判定してもよい。GPSユニットの代わりに、差動GPSユニットが使用されてもよい。差動全地球測位システム(DGPS)は全地球測位システム(GPS)の改良版であり、固定地上基準局のネットワークを使用して、衛星システムにより示された位置と既知の固定位置との間の差分を同報通信する。これらの局は、測定された衛星の擬似距離と実際の(内部で計算された)擬似距離との間の差分を同報通信し、受信局は自身の擬似距離を同一量分修正してもよい。
・DMI(距離測定計器)。この計器は、車輪22のうちの1つ以上の車輪の回転数を検知することにより、自動車21が移動した距離を測定する走行距離計である。GPSユニットからの出力信号から表示信号を算出する際にマイクロプロセッサμPがDMIにより測定された距離を考慮できるようにするために、DMIもマイクロプロセッサμPに接続される。
・IMU(慣性測定ユニット)。そのようなIMUは、3つの直交方向に沿う回転加速度及び並進加速度を測定するように構成される3つのジャイロユニットとして実現可能である。GPSユニットからの出力信号から表示信号を算出する際にマイクロプロセッサμPがDMIによる測定値を考慮できるようにするために、IMUもマイクロプロセッサμPに接続される。IMUは、推測航法センサを更に含んでもよい。
【0047】
尚、車両及び機器(これらは、車両の基準位置及び姿勢を参照して既知の位置及び姿勢を用いて取り付けられる)の正確な場所及び姿勢を提供するためのグローバルナビゲーション衛星システム、車載慣性システム及び車載推測航法システムの多くの組み合わせが当業者により見つけられる。
【0048】
図21に示すようなシステムは、例えば自動車21に取り付けられた1つ以上のカメラ29(i)を用いて写真を撮影することにより地理データを収集するいわゆる「モバイルマッピングシステム」である。カメラ29(i)はマイクロプロセッサμPに接続される。自動車前方のカメラ29(i)は立体カメラであってもよい。カメラは、画像が既定のフレーム速度で取り込まれた画像シーケンスを生成するように構成されてもよい。好適な一実施形態において、カメラの1つ以上は、自動車21の既定の変位毎又は時間間隔毎に写真を取り込むように構成されたスチルカメラである。カメラ29(i)はμPに画像を送出する。一実施形態において、モバイルマッピング車両は3つのカメラを備える。そのうちの1つは前方観察用カメラであり、両側のカメラは、車両の進行方向に対して30〜60度の範囲にあり好ましくは45度である観察軸を有する。その場合、前方観察用カメラは路面上方の道路指示を検出するのに特に適した画像を取り込み、側方観察用カメラは道路に沿った道路標識等のオブジェクトを検出するのに特に適した画像を取り込む。
【0049】
更にレーザスキャナ23(j)は、自動車21が関心道路に沿って走行している間にレーザサンプルを取得する。従って、レーザサンプルはそれらの関心道路に関連する環境に関するデータを含み、路面、建物群、樹木、交通標識、駐車車両、人間、方向案内標識、道路の側部等に関するデータを含んでもよい。レーザスキャナ23(j)もマイクロプロセッサμPに接続され、それらのレーザサンプルをマイクロプロセッサμPに送出する。
【0050】
一般に、3つの測定ユニット、すなわちGPS、IMU及びDMIから可能な限り正確な場所及び姿勢の測定値を提供することが望まれる。これらの場所及び姿勢データは、カメラ29(i)が写真を撮影し且つレーザスキャナ23(j)がレーザサンプルを取得する間に測定される。写真及びレーザサンプルの双方は、後で使用するために、これらの写真が撮影されたのと同時に収集された自動車21の対応する場所及び姿勢データと関連付けてμPの適切なメモリに格納される。写真は、例えば路面、建物群、樹木、交通標識、駐車車両、人間、方向案内標識、記念碑等に関する視覚情報を含む。レーザスキャナ23(j)は、道路情報に沿う3D表現において視覚化するのに充分な密度のレーザスキャナ点群を提供する。一実施形態において、レーザスキャナ23(j)は、方法に対して充分な密度の出力を生成するために、最小35Hz及び1度の解像度を有する出力を生成するように構成される。SICKにより製造されるMODEL LMS291−S05等のレーザスキャナは、そのような出力を生成できる。レーザスキャナの最小限の構成は、自動車21の前方又は後方を見下ろし且つ自動車が走行している路面を検知する1つのレーザスキャナを有することである。最適な構成は、自動車21の左側又は右側の領域を走査する1つ又は2つのレーザスキャナ及び自動車21の後方又は前方を見下ろす1つのレーザスキャナを有することである。後者のレーザスキャナは、自動車21の走行方向に対して平行な回転走査軸を有する。他のレーザスキャナは、自動車21の走行方向に対して45度の角度の回転軸を有する。未公開の国際出願第PCT/NL2007/050541号において、2つのレーザスキャナが異なる瞬間に同一の表面を走査する構成を使用することの更なる利点が開示される。尚、レーザスキャナの代わりに、距離情報又は密な点群を提供する他の何らかのレンジセンサが使用されてもよい。
【0051】
図7は、図6に示す3つの測定ユニットであるGPS、DMI及びIMUから取得可能な位置信号を示す。図7は、マイクロプロセッサμPが6つの異なるパラメータ、すなわち所定の座標系における原点に関する3つの距離パラメータx、y、z、並びにx軸、y軸及びz軸に関する回転をそれぞれ示す3つの角度パラメータωx、ωy及びωzを算出するように構成されることを示す。z方向は重力ベクトルの方向と一致するのが好ましい。グローバルUTM又はWGS84座標系が所定の座標参照系として使用されてもよい。尚、本発明に係る方法は、NAD83及び他のナショナルグリッドシステム等のローカル座標参照系と共に使用可能である。6つの異なるパラメータは、車両の位置及び姿勢を同時に追跡するために必要なMMSプラットフォームの6つ(x、y、標高、進行方向、横揺れ、縦揺れ)の位置決め及び姿勢を提供する。カメラ及びレーザスキャナは、自動車21に対して固定された位置及び姿勢を有する。これにより、画像又はレーザサンプルを取得した時点での座標参照系における各レーザサンプルの位置、並びに座標参照系におけるカメラの位置及び姿勢を6つのパラメータから正確に判定できる。
【0052】
動作402において、線形地表特徴が画像データにおいて検出される。線形静止地表特徴は、例えば、道路区分の路面のエッジ、2つの領域間に明確に定義された視覚的エッジを有する何らかの物理的特徴、並びに3Dモデルがモバイルマッピングデータから導出可能であり且つ空中又は衛星画像において写真識別可能である他の何らかの地表特徴である地表におけるどんな物理的視覚的線形特徴であってもよい。
【0053】
動作404において、選択された線形静止地表特徴の座標参照系における位置がMMSデータの画像データ、レーザデータ及び位置データから抽出される。動作406において、3Dモデルが選択された線形地表特徴に対して生成され、動作408において、3Dモデルは測地参照データベースに格納される。
【0054】
動作402、404及び406を実現できる多くの実現例が存在する。対応する動作を実行するための適切な方法及びアルゴリズムは当業者には既知である。1つの手法は、MMSデータからの画像を個別に処理し、画像データ、レーザデータ及び位置データを組み合わせることにより特徴の3D位置情報を抽出することである。同一の線形特徴が2つ以上の画像に延在する場合、線形特徴をモデル化するために対応する画像の3D位置情報を組み合わせる必要がある。
【0055】
本発明によると、MMSデータからの画像はオルソモザイクを取得するために処理される。オルソモザイクは、モバイルマッピングシステムの軌道線の一部に沿う地表のオルソ補正図を視覚化する。大部分の例において、オルソモザイクは、路面、舗道及び道路に沿う道路の側部の一部を表す。埠頭及び堤防等の建造物により定義された水涯を取り込むために、モバイルマッピングシステムは水路を航行する船舶であってもよい。
【0056】
国際出願第WO08044927号において、モバイルマッピング画像からオルソタイル及びモザイクを生成する方法が開示される。画像は、モバイルマッピング車両の前方の路面を表す仮想平面上に投影される。路面の実表面モデルは、レーザデータから容易に導出可能である。当業者は、オルソ画像を生成するために、仮想平面の代わりにレンジデータを処理することにより取得された実表面モデル上に画像を投影するために第WO08044927号において開示された方法を容易に適用できる。実表面モデルの位置が既知であるため、地理参照系におけるXY位置の次に、各画素に対する標高情報も画像データ及びレーザデータから容易に導出され、オルソモザイクにリンクされる。尚、本出願において、オルソ画像は、各画素に対して座標参照系におけるxy座標を定義するメタデータを含む画像を意味する。xy座標は、地球の3Dモデルを定義するジオイド上の位置である。更に、各画素値は、xy位置における地表の姿勢に対して垂直視した場合の地表、すなわち地表モデルの地表を表すと考えられる。
【0057】
標高情報は、「実世界」の表面のxy位置の高さと前記xy位置における地球の3Dモデルを定義するジオイドにより仮定される高さとの間の差分を定義する。
【0058】
上述のように取得されたオルソ画像は、道路区分等の線形特徴を検出し且つ前記線形特徴の座標参照系における位置を抽出するのに非常に適している。オルソ画像から線形参照画像を生成できる。線形参照画像は、特定の列がモバイルマッピング車両の軌道線に対応し且つ画素の各行が軌道線に対して垂直な線に沿う地表を表す画像である。未公開の国際出願第PCT/NL2007/050477号において、モバイルマッピングデータから線形参照画像を生成する方法が開示される。線形参照画像において、湾曲道路は直線道路として視覚化される。直線道路の場合、センターライン、道路の左エッジ、道路の右エッジ、道路の幅及び線形道路標示等の道路区分の特徴の判定はより容易である。未公開の国際出願第PCT/NL2007/050159号において、オルソ画像から道路の幅及びセンターラインのデータを生成するシステム及び方法が開示され、これは使用するのに適している。未公開の国際出願第PCT/NL2007/050569号において、道路が画像において既知の姿勢を有する画像から線形車線情報データを生成するシステム及び方法が開示される。前記出願により、線形参照画像において線形道路標示を正確に検出できる。
【0059】
前段落から、画像において対応する位置を判定するため及び座標参照系における対応するXY位置を算出するためにモバイルマッピングデータから線形特徴を検出するために複数の方法が使用可能であることは明らかである。リンクされた標高情報と組み合わせることにより、線形特徴の3Dモデルを容易に生成できる。3Dモデルはベクトルに基づくモデルであるのが好ましい。
【0060】
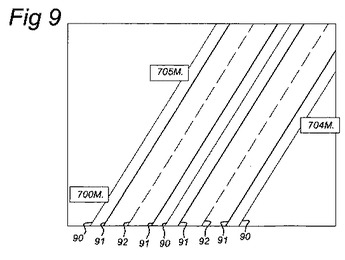
道路区分は異なる方法でモデル化可能である。図9はいくつかの例を示す。3Dモデルは、道路のセンターライン92、舗装のエッジ90、法定エッジ91、すなわち車道線の左エッジ及び右エッジ又はそれらの何らかの組み合わせに関して道路区分を記述してもよい。尚、道路のセンターラインは道路のエッジ間の中間点又は道路のセンターラインを示す道路標示であってもよい。アプリケーションにおいて3Dモデルを使用する場合、使用される定義が既知である必要がある。一実施形態において、線形特徴はポリラインにより記述される。コンピュータグラフィックスにおいて、ポリラインは1つ以上の線分から成る連続した線である。ポリラインは各線分の端点により指定される。一実施形態において、1つのポリラインは道路区分を記述するために使用される。更に、xy平面における道路区分の方向に対して垂直な道路の幅及び傾斜が路面のサイズ/幅及び形状を記述するために追加されてもよい。別の実施形態において、道路区分は、舗装されたエッジに対応する2つのポリラインにより記述される。更に、道路のセンターラインに対応するポリラインが追加されてもよい。道路区分の路面の形状は、道路区分を記述する道路のセンターライン、舗装されたエッジ又はエッジラインを記述するために使用された線のいずれかを介する僅かに隆起した表面により定義されてもよい。一般に、路面は、例えば左エッジライン及び右エッジラインである2つのポリライン間の最短線により近似可能である。
【0061】
図8は、例として道路のセンターライン81及びエッジライン80に対応する線を示す。更に、図8は第1の道路区分82、第2の道路区分83及び第3の道路区分84を示す。第1の道路区分82は、幹線道路の道路区分の出口までの最後の部分に対応する。第2の道路区分83は2つの幹線道路の間の相互連結に対応し、第3の道路区分84は別の幹線道路の区分の開始部分に対応する。3Dモデルが標高情報を含むため、第1の道路区分82は第3の道路区分84の下側になり、第2の道路区分83は第1の道路区分82の高さから第3の道路区分84の高さまで徐々に高さが変化する。これは、空中又は衛星画像を正確に補正するのに有用な情報である。更に、第2の道路区分の傾斜及び曲率はADASアプリケーションに対する重要な情報を提供する。
【0062】
3Dモデルは、レーザデータから導出されるDSMによりエッジライン間の路面の表面を更に記述してもよい。このDSMは、航空機搭載又は衛星プラットフォームから導出される現在のDSM又はDEMよりはるかに密なレーザ点格子を有する。そのようにして取得されたDSMは、より正確で密な標高情報を用いて航空機搭載又は衛星プラットフォームからのDSM/DEMを局所的に強化するために使用されてもよい。
【0063】
道路区分の3Dモデルはデータベースに格納される。動作410において、道路区分の3Dモデルは、連続基準ネットワークを形成するために互いに連結される。ネットワークのノードは分岐点に対応し、ネットワークのブランチは分岐点の間の道路区分又は分岐点に接続される道路区分に対応する。動作412において、連続線形基準ネットワークは地理参照データベースに格納される。ネットワークは、データベースからある地域の路面のDSMを容易に抽出する手段を提供する。ネットワークの特徴は、複数の道路区分が道路網の連続するシームレスなDSMからの分岐点において接触することである。これは、道路区分が同一のデータソース、すなわち同一のモバイルマッピングセッションから導出される場合に保証される。
【0064】
画像データは主に、最初に画像において路面の場所を判定するために使用され、画像における場所及びレーザデータを組み合わせることにより座標参照系における路面の位置を判定するために使用される。しかし、画像データは、道路標示、路面のテクスチャ及び色、舗装の種類、路肩等を示す路面の「実世界」の外観を用いて3Dモデルを向上するために更に使用可能である。更に、それらの標示は、道路区分の完全な位置決め及び/又は補正を可能にするための密なGCPアレイを形成できる。動作414において、オルソ画像が線形特徴に対して生成される。上述のように、動作402〜406において、路面のオルソ画像又はモザイクは既に生成されている。従って、動作414は3Dモデルに対するオルソ画像を構成するためにオルソ画像の対応する領域又は画素を選択することに限定される。オプションとして、動作416において、標高情報が3Dモデルに対するオルソ画像の各画素に関連付けられる。線形特徴が道路区分である場合、路面はエッジライン間の平坦な表面により近似可能である。標高情報はエッジライン間の補間技術により導出可能である。動作418において、オルソ画像と標高情報とをリンクすることにより、3Dオルソ画像が生成される。動作420において、3Dオルソ画像は対応する3Dモデルへのリンクと共に地理参照データベースに格納される。
【0065】
従って、一実施形態において、3Dモデルは、ポリラインにより記述された対応する道路区分のオルソ画像を更に含む。オルソ画像は、画像データ、レンジデータ及び位置/姿勢データから正確に導出可能である。上述の処理から作成されたオルソ画像は、空中又は衛星画像の補正処理を向上するため及び補正済みの空中又は衛星画像を修正/向上するための参照画像として使用可能である。道路のセンターライン、破線、停止線等の道路標示は、補正/修正される画像においてマッチングするものを見つけるために使用可能である。これは、道路区分に沿う画像を補正/修正するための更なる地上基準点を提供する。レーザデータは、3Dモデルに関連付けられるオルソ画像の各画素に標高情報を割り当てるために更に使用されてもよい。標高情報は、補正される画像が取り込まれる位置から見た視界に対応する画像においてオルソ画像を変換するために使用されてもよい。これにより、補正処理におけるマッチング処理の精度が向上し、誤ったマッチングの可能性が低下する。
【0066】
尚、標高情報を含む3Dオルソ画像のサイズは路面の領域に限定されるべきではない。それは、画像データ及びレンジデータから導出可能な道路回廊内の地表全体のオルソ補正図を表してもよい。
【0067】
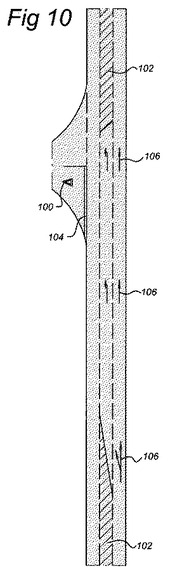
尚、道路区分に対する3Dオルソ画像の代わりに、画像チップが生成されてもよい。画像チップは静止地表特徴の表現である。静止路面特徴の例は、停止線、「直前の『一時停止』の警告」、誘導矢印、下水道の鉄格子、制限速度、横断歩道、出口における狭くなる道路のエッジライン、急峻な湾曲エッジ、マンホールの鉄蓋及び図9の他の何らかの方向指示90である。他の路面特徴は、斜線標示又は逆V字形標示、折り返し矢印、分岐矢印である。Traffic Signs Manual 2003、第5章、Road Markings、ISBN 0 11 552479 7は、使用可能な道路標示の概要を提供する。図10は、「直前の『一時停止』の警告」100、斜線標示102、停止線104及び方向指示106を示す。更に、他の何らかの道路の塗装、舗装の種類の明確な変化、記念碑の台座、低部に位置する特有の地質学的特徴が画像チップを生成するために使用されてもよい。
【0068】
画像チップは、オルソ画像から取得された静止地表特徴のスナップショット画像と、座標参照系におけるXY位置を表すメタデータと、高さ情報の標高とを含む。画像チップの少なくとも1つの画素は、座標参照系における画像チップの位置を定義するための関連する位置情報を有する必要がある。これは、関連付けられる3Dモデルに対する相対位置であってもよい。オプションとして、画像チップは、画像チップの手動検査を可能にするために元のオルソ画像、タイル又はモバイルマッピングセッションの画像に対する参照を有してもよい。画像チップの各画素は、座標参照系における関連する標高情報を含んでもよい。その場合、画像チップは3Dオルソ画像でもある。画像チップのサイズは、静止路面特徴のサイズ及び画素のサイズに依存する。1つの画素は3〜15cm×3〜15cmの領域を表し且つ座標参照系において50cmより高い絶対水平解像度及び1.5mより高い絶対垂直解像度を有するのが好ましい。データベースにおける解像度は、画像データ、レンジデータ及び位置/姿勢データの精度/解像度、並びにデータベースが意図される適用例に依存する。
【0069】
画像チップは対応する3Dモデルへのリンクを与えられ、測地参照データベースに格納される。画像チップは、空中又は衛星画像において見つけられるGCPとして使用可能であり、空中又は衛星画像において3Dモデルとマッチングする場所を見つける直接処理に使用可能である。
【0070】
本発明に係る方法は、相対的に安価なデジタルカメラ、レーザセンサ及び位置判定手段を備えてもよい相対的な安価な車両により取り込まれたデータから測地参照データベースを生成する。方法は、オルソ補正処理において地上基準オブジェクトとして使用可能である写真識別可能なデータの集合を作成する。本発明により、従来の地上基準製品より数桁多い地上基準オブジェクト及びGCPの大量収集が可能である。方法は、全ての測地次元において一貫性があり且つ検査可能な精度プロファイルを有する。方法は、今後の空中画像のオルソ補正に使用するために最初に現場において特定の写真識別可能な地表の印を作成する必要がない。更に、データベースは今後長期間存在すると考えられる写真識別可能な物質を多く含む。データベースが3D情報を含むため、これは3D表面モデルを修正するために更に使用可能である。
【0071】
MMSデータを使用することの別の利点は、1つのモバイルマッピングセッションにおいて、画像データ及びレーザデータが分岐点を2回以上横断するか又は道路区分を2回以上移動する場合に地表の領域を2回以上記録することである。これらの領域は、地上基準オブジェクトとして使用可能な静止路面特徴を含んでもよい。実際、静止路面特徴は座標参照系において同一の場所を有する。しかし、位置決め判定は1つのモバイルマッピングセッションにおいて何らかの絶対的及び相対的な誤りを有する場合がある。本発明に係る方法はこれらの線形静止路面特徴を2回以上選択し、対応するXY位置及び標高情報であるZ座標は毎回判定される。判定された各線形静止路面特徴に対して、3Dモデルと、XYZ位置を記述するメタデータと、オプションで元のオルソ画像に対する参照とがデータベースに記録される。同一の線形地表特徴に関する記録を解析することにより、重複する情報がデータベースから除去される。例えば、同一の線形静止路面特徴の画像及びメタデータを組み合わせることにより、すなわちそれらを平均するか又は異常を排除することにより、重複する情報が除去される。XY位置及び標高情報を平均することにより、XYZ座標に対する平均値を有するメタデータが3Dモデルに対して算出可能である。一般に、平均値は座標参照系における3Dモデルの位置を更に正確に定義する。
【0072】
図5において、本発明を実現するのに適したコンピュータ構成500の概略が示される。コンピュータ構成500は、算術演算を実行するプロセッサ511を備える。プロセッサ511は、ハードディスク512、読み出し専用メモリ(ROM)513、電気的消去可能プログラマブル読み出し専用メモリ(EEPROM)514及びランダムアクセスメモリ(RAM)515を含む複数のメモリ構成要素に接続される。メモリ構成要素は、本発明に従って空間データ変更メッセージを生成する方法又は空間データ変更メッセージを処理する方法をプロセッサ511に実行させるように構成されたデータ、すなわち命令を含むコンピュータプログラムを含む。必ずしもこれらメモリの種類の全てを設ける必要はない。更に、これらのメモリ構成要素はプロセッサ511に物理的に近接して配置される必要がなく、プロセッサ511から離れて配置されてもよい。方法に関連する入力データ及び出力データは、コンピュータ構成500の一部として格納されてもよく、あるいはそのように格納されなくてもよい。例えば、入力データはウェブサービスを介してアクセスされてもよい。別のプロセッサ上で実行中の処理により動作を実行することも可能である。
【0073】
プロセッサ511は、ユーザにより命令、データ等を入力する手段、例えばキーボード516及びマウス517に更に接続される。当業者には既知であるタッチスクリーン、トラックボール及び/又は音声変換器等の他の入力手段が更に設けられてもよい。
【0074】
プロセッサ511に接続された読み取りユニット519が設けられてもよい。読み取りユニット519は、フロッピディスク520又はCDROM521等の取り外し可能なデータ記憶媒体又は取り外し可能な記憶媒体からデータを読み取り且つ場合によってはそれらにデータを書き込むように構成される。当業者には既知であるように、他の取り外し可能なデータ記憶媒体は、テープ、DVD、CD−R、DVD−R、メモリスティック、固体メモリ(SDカード、USBスティック)コンパクトフラッシュ(登録商標)カード、HD DVD、ブルーレイ等であってもよい。
【0075】
プロセッサ511は、紙上に出力データを印刷するためのプリンタ523及びディスプレイ518、例えばモニタ又はLCD(液晶ディスプレイ)画面、ヘッドアップディスプレイ(フロントガラスに投影される)、あるいは当業者には既知である他の何らかの種類のディスプレイに更に接続されてもよい。
【0076】
プロセッサ511は、スピーカ529に接続され且つ/あるいはグラフィック文書及び他の文書を走査するように構成されたデジタルカメラ/ウェブカム又はスキャナ等の光学読取り装置531に接続されてもよい。
【0077】
更にプロセッサ511は、I/O手段525により例えば公衆交換電話網(PSTN)、ローカルエリアネットワーク(LAN)、ワイドエリアネットワーク(WAN)、無線LAN(WLAN)、GPRS、UMTS、インターネット等である通信ネットワーク527に接続されてもよい。プロセッサ511は、ネットワーク527を介して他の通信構成と通信するように構成されてもよい。
【0078】
データ記憶媒体520、521は、本発明に従って方法を実行する能力をプロセッサに提供するように構成されたデータ及び命令の形態のコンピュータプログラムを含んでもよい。しかし、そのようなコンピュータプログラムは電気通信ネットワーク527を介してメモリ構成要素にダウンロードされてもよい。
【0079】
プロセッサ511は、独立型システムとして実現されてもよく、各々がより大きなコンピュータプログラムのサブタスクを実行するように構成された複数の並列プロセッサとして実現されてもよく、あるいは複数のサブプロセッサを有する1つ以上のメインプロセッサとして実現されてもよい。本発明の機能性の一部は、電気通信ネットワーク527を介してプロセッサ511と通信するリモートプロセッサによって実行されてもよい。
【0080】
図5のコンピュータシステムに含まれる構成要素は、汎用コンピュータシステムにおいて通常見られる構成要素であり、当業界において既知であるそのようなコンピュータ構成要素の広範な種類を表すことを意図する。
【0081】
従って、図5のコンピュータシステムは、パーソナルコンピュータ、ワークステーション、ミニコンピュータ、メインフレームコンピュータ等であってもよい。コンピュータは、異なるバス構成、ネットワーク化プラットフォーム、マルチプロセッサプラットフォーム等を更に含むことができる。UNIX(登録商標)、Solaris、Linux、Windows(登録商標)、Macintosh OS及び他の適切なオペレーティングシステムを含む種々のオペレーティングシステムが使用可能である。
【0082】
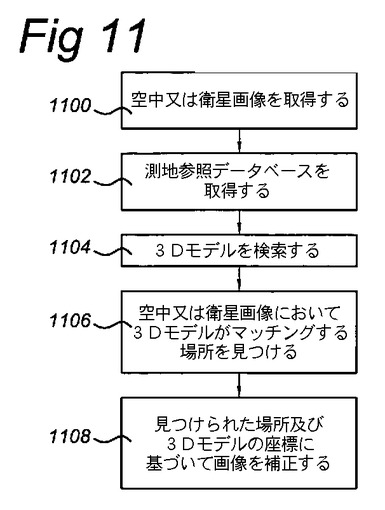
図11は、空中又は衛星画像を補正する方法を示すフローチャートである。動作1100において、空中又は衛星画像が取得される。オルソ画像は実行されたオルソ補正処理により生じた修正不能な歪みを含むか又は補正処理の実行時に更なる歪みを生じさせる場合があるため、画像は透視投影画像のオルソ画像ではなく透視投影画像であるのが好ましい。動作1102において、本発明により取得された3Dモデルを含む測地参照データベースが取得される。動作1104において、3Dモデルが測地参照データベースから検索される。補正される画像の範囲に含まれると予測される3Dモデルのみが選択されるのが好ましい。動作1106において、3Dモデルとマッチングする場所が画像において探索される。3Dモデルは、写真識別可能な領域の境界を記述する。従って、対応するマッチング領域が画像において見つけられてもよい。3Dモデルのオルソ補正図がマッチング領域を見つけるために使用されてもよい。
【0083】
通常、空中又は衛星画像を取得するデジタルカメラの位置は座標参照系において既知である。そのため、3Dモデルをデジタルカメラの位置から見た場合の透視投影画像に変換でき、画像において対応する場所を見つけることができる。この変換により、画像において正確な場所を見つける成功率が向上する。場所を見つけた後、隣接する3Dモデルは画像において対応する場所を見つけるために使用される。この処理は、隣接する3Dモデルが画像の範囲外になるまで繰り返される。このように、3Dモデルと画像内の対応する場所との間の関係は、動作1108において画像を補正するための入力を提供する。マッチングする各3Dモデルは地上基準オブジェクトとして使用される。ここで、透視投影画像により視覚化された地表の仮定された領域の範囲内に含まれる場所を有する全ての3Dモデルは、画像が投影されるDSMとして使用される。対応する3Dモデルと組み合わされた画像内のマッチングする場所により、前記マッチングする場所に対応する画像の部分を正確にオルソ補正できる。ネットワークを形成する3Dモデルの範囲に含まれない領域は、周知の補正アルゴリズムにより補正可能である。
【0084】
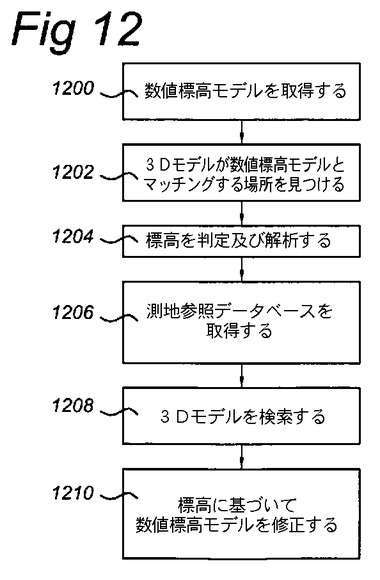
図12は、DEMを修正する方法を示すフローチャートである。動作1200において、修正される数値標高モデル又は数値表面モデルが取得される。動作1202において、測地参照データベースが取得される。動作1204において、1つ以上の3Dモデルが測地参照データベースから検索される。動作1206において、1つ以上の3Dモデルが数値標高モデルとマッチングする場所を探索する。動作1208において、3Dモデルの座標参照系における座標とDEMにおける場所との間の偏差が判定される。偏差は、誤差の種類を判定するために解析される。誤差は、平行移動誤差、変倍誤差、局所誤差であってもよい。動作1210において、数値標高モデルは解析結果、すなわち誤差の種類に基づいて修正される。DEMを修正する方法は、地表を表す色情報を含むDEMの三角形分割を向上するように更に構成されてもよい。DEMはラスタ(複数の正方形から成る格子)又は不規則三角網として表現されてもよい。ドロネー三角形分割を使用する場合、三角形分割における全ての角度のうちの最小角が最大にされる。それらは、鋭角三角形を回避する傾向がある。しかし、4つの点により形成される四角形は2つの三角形分割が可能である。動作1210は、三角形分割を制御する切断線として平坦であるか又は僅かに隆起した表面を有する道路区分の外エッジを記述する3Dモデルを使用するように更に構成される。道路区分を表す3Dモデルは、僅かに隆起した表面領域の外エッジを記述する。一実施形態において、切断線はDEMに更なる標高を追加するために使用され、三角形分割は前記更なる点を使用する。別の実施形態において、動作1210は、2つの可能な三角形分割のうち3Dモデルにより定義された表面に最適に対応する一方を選択するように構成される。
【0085】
本発明に係る測地データベースは、道路区分を表す3Dモデルに対応する密な点ネットワークをDEM/DSMに追加することにより、前記DEM/DSMを局所的に向上するために更に使用されてもよい。3Dモデルは、DEM/DSMの対応部分を置き換えるために更に使用されてもよい。これは、ADASアプリケーション等のナビゲーションアプリケーションにおいて使用されてもよいDEM/DSMを提供する。
【0086】
本発明の上述の詳細な説明は、例示及び説明のために与えられた。これは、全ての実施形態を含むこと又は本発明を開示される形態に限定することを意図せず、上記の教示を鑑みて多くの変更及び変形が可能であることは明らかである。説明された実施形態は、本発明の原理及びその実際の用途を最適に説明し、それによって他の当業者が考えられる特定の使用に適した種々の変形例を伴い且つ種々の実施形態において本発明を最適に利用できるようにするために選択された。本発明の範囲は、添付の請求の範囲により定義されることが意図される。
【技術分野】
【0001】
本発明は、測地参照データベースを生成する分野に関する。
【0002】
更に本発明は、測地参照データベースを生成するコンピュータにより実現されるシステム、測地参照データベース、コンピュータプログラム、並びにコンピュータプログラム又は測地参照データベースを備えるプロセッサ可読媒体に関する。測地参照データベースは、同一の地理的領域の異なる画像をオルソ補正する際に有用である。
【背景技術】
【0003】
地上基準点(GCP:Ground Control Points)は、衛星画像、空中画像又は航空測量画像を標準的な地図投影にオルソ補正する際に使用される。地上基準点は、遠隔検知された画像、地図又は空中写真上で認識可能であり且つそれらの各々において正確に配置可能である地表上の何らかの点であってもよい。地上基準点は、座標参照系における既定の関連座標を有する。地上基準点は、既知の場所の地表上の点である(すなわち、確立された座標参照系内で固定される)。GCPは、遠隔検知された画像又は走査された地図等の画像データソース及び地理物理学的測量中に生成される分離された測量格子を地理参照するために使用される。GCPは以下のいずれであってもよい。
・選択点及びその周辺を示す紙の地図の一部のコピー
・選択点及びその周辺を示す走査された地図からの画像チップ
・選択点及びその周辺を示すデジタル地図からの画像チップ
・選択点の文書による記述又はスケッチ
・選択点及びその周辺を示す空中/衛星写真又は地上写真からの画像
・空中/衛星画像又は平面地図において認識可能であるように文書化された適切な特定の場所の他の何らかの表現。
【0004】
GCPは、座標参照系における関連する正確なX、Y及びZ座標を有する1つの点を識別するための何らかの写真認識可能な特徴であってもよい。GCPは、衛星又は空中画像において明確に識別可能な地表特徴を記述する。GCPの最も重要な条件は、オルソ補正される画像における視認性である。第2の特徴は耐久性である。理想的には、GCPはオルソ補正される画像における画素の少なくとも4倍のサイズを有する必要がある。GCPを定義するために使用される地表特徴は、文化的特徴、線特徴及び自然特徴であってもよい。
【0005】
通常、文化的(人工)特徴はGCPとして使用するのに最適な点である。それは、道路の交点、道路及び線路の交点、道路及び森林と農地との間の境界線の交点等の道路及び可視である生物地理学的境界の交点、交差点、河川橋、大きな低層の建物(格納庫、工業用建物等)、空港等を範囲に含む。
【発明の概要】
【発明が解決しようとする課題】
【0006】
本出願において、線特徴は、画像において明確に定義されたエッジを有する場合に使用されてもよい。通常、GCPは2つの線特徴の交点の中心として選択される。交点を形成する2つの線特徴は、60度より大きい角度で交差する必要がある。
【0007】
一般に、自然特徴は形状が不規則であるため好ましくない。しかし、適切な文化的特徴が存在しない領域においては自然特徴を使用する必要がある。自然特徴が明確に定義されたエッジを有する場合、それはGCPとして使用されてもよい。それは、森林の境界、森林の小道、森林内の開墾地、河川の合流点等であってもよい。そのような点を選択する場合、特定の境界(森林、水塊)はいずれ変化する可能性があることを考慮する必要がある。適切な特徴が不十分である状況において、測量士はGCPを識別するために観測可能な特徴を作成できる。
【0008】
空中又は衛星画像を地理参照又は補正するために、画像毎にGCPの集合を選択する必要がある。集合のGCPは、画像において均一に選択される必要がある。好ましくは画像において均等な分布で画像のエッジ付近の点を選択する必要がある。また、GCPの集合は、シーンにおける地形の変化を更に考慮するのが好ましい。すなわち、標高が最も高い点及び最も低い点の双方を選択するのが好ましい。
【0009】
GCPは、人間が現地に赴き、GCPの画像又は対応する記述、並びに、例えば、GPS受信機の位置判定手段により座標参照系における対応するX、Y及びZ座標の双方を収集することにより生成されてもよい。Jed Gregory他による「Accurate mapping of Ground Control Point for Image Rectification and Holistic Planned Grazing Preparation」、GIS Training and Research Center、Idaho State University Pocatello、ID 83209−8130、2006年10月において、画像の正確な地理補正を保証するために、GCPを確立し且つそれらの正確な空間的配置を記録する必要があった。GCPは、地理補正される領域全体にわたり戦略的に設定された。GCPは、十字(+)の形状に重ね合わせた幅6インチ及び長さ6フィートの2つのプラスチックの薄板を使用して設定された。全てのGCPは、十字の各辺が4方位(北、南、東、西)のうちの1つを指すように方向付けられた。各GCPの配置後、GPSの場所がTrimble GeoXT GPSユニットを使用して十字の中心において記録された。前記文献は、正確なGCPを収集するために必要な膨大な時間及び労力を不要にする。
【0010】
基本的には、オルソ補正処理において行われる2つの修正が存在する。オルソ補正は、各画素が地表を記述するジオイド上の既知のXY位置を有し且つ各画素が前記XY位置において地表に対して垂直視されると考えられる画像に透視投影画像を変換することである。最初に何らかの偏移(平行移動及び回転誤差)、傾き又は変倍の問題が修正され、次に標高の変化による歪み現象が修正される。画像に適用される現在のオルソ補正処理において、標高の歪みは水平誤差の主要な原因である。これを図1に示す。航空機1に取り付けられたカメラは、地表2(図1では断面で示す)の透視投影画像を記録する。しかし、画像内の1つの画素のみが地表を垂直視した図を表すことができ、他の全ての画素は地表を斜めから見た図を表す。図1は、所定のy座標に対する地表の断面を示す。水平な線3は、例えばWGS84である座標参照系における所定のy座標に対する地球の基準面又は座標参照系における地表を記述する他の何らかのジオイドの断面を表すと仮定される。地表2におけるxyz位置及び高さが既知である地表上の例えば橋である建造物4が示される。更に、空中画像の取り込み点5の座標参照系における位置及び姿勢は既知である(例えば、正確なGPS及び/又は他の位置/姿勢判定手段により)。幾何学により、建造物の上側の画素及び対応するxy位置を判定できる。しかし、基準面3に対する地表の高さ、すなわちz座標が既知ではない場合、第1の地形誘引誤差6がオルソ画像において発生する。同様に、建造物の高さも既知ではない場合、建造物の高さに誘引される更なる誤差7が最終オルソ画像において発生する。その場合、上側又は建造物はオルソ画像において正確なxy位置から数メートル離れて投影される場合がある。建造物が橋である例において、基準面に対する標高情報が(正確に)わからない場合、橋上の道路は不正確に投影される。図2は、この種の誤差を示す。
【0011】
図2は、数値標高モデル(DEM)が空中画像をオルソ補正するために使用されるオルソ画像を示す。DEMは「裸の地球」と呼ばれることが多く、下層の地形を露呈することで数値表面モデルDSMに伴う全ての文化的特徴及び生物地理学的特徴をデジタル処理で除去することにより作成される。DSMは、座標参照系における場所及び標高情報の双方を含む地球の第1表面図である。DEMは、ラスタ(複数の正方形から成る格子)、等値線又は等高線の集合、あるいは不規則三角メッシュ網として表されてもよい。USGS 10m National Elevation Data Set(NED)はコスト効率の高い利用可能なDEMであるが、図2に示すように橋、建物及び高架構造物を正確にオルソ補正できない。橋の高さを考慮しないことにより、橋の上側は橋の実際の場所に対して移動される。オルソ画像に重ね合わせた白線により図2における橋の実際の場所を示す。図3は、正確にジオコーディングされたDSMが空中画像をオルソ補正するために使用されるオルソ画像を示す。建造物の正確な高さを使用することにより、建造物がオルソ画像空間上に正確に投影されることがわかる。建造物の輪郭を示す白線がオルソ画像において見られる輪郭と一致する場合、建造物は正確に投影される。
【0012】
尚、DEM及びDSMの双方は地表のモデルのみを提供する。それらは、検知された画像、地図及び空中写真上で容易に認識可能な情報を含まない。GCPがDEM又はDSMに関連付けられない場合、そのような画像をオルソ補正するためにGCPを使用できない。使用されるGCPの精度、GCPの数(総数)及び補正される画像にわたる分布/密度は、結果として得られる画像又はオルソ補正処理の精度を判定する。基礎となる標高の変化の特徴は、必要なGCPの分布/密度を判定する。例えばKansasの平坦部は、平坦部のエッジにおけるいくつかのGCPのみを必要とする。小川に架かる小さい橋は多くのGCPを必要としない。大渓谷に架かる巨大な橋は、橋のエッジを正確に記述するために密度の高いGCPを必要とする場合がある。同様に、起伏のある丘陵地は平坦地より多くのGCPを必要とする。
【0013】
多くの場合、地理情報システムはデジタル地図情報及びオルソ画像の双方を1つのビューにおいて組み合わせる。デジタル地図情報に追加するか、あるいはデジタル地図情報を修正又は検査するために、画像からの情報が抽出又は解析されてもよい。同様に、オルソ画像は、ナビゲーション装置において使用するためのデジタル地図情報を抽出するために使用されてもよい。双方の状況において、オルソ画像における特徴の場所が地上での実際の場所に対応することが重要である。最初の例において、高さが不正確であるため、オルソ画像における路面の位置はデジタル地図から得られる対応する路面と一致しない。例えば図2を参照。この場合、ナビゲーション装置は、不適切にオルソ補正された画像から抽出された自身の地図データベースにおける位置と異なる位置を測定する可能性があり、ナビゲーション装置のユーザに危険な走行状態を誤って通知する警報を提供する可能性がある。
【0014】
空中画像又は衛星画像から正確なオルソ画像を生成するための条件は、充分なGCPがオルソ画像により表される領域内に存在することである。現在、オルソ補正のコストは人間により取り込まれるGCPの数に比例して増加する。オルソ画像の必要な精度を得るために必要とされるGCPが増加するほど、より多くの人的労力が必要とされる。
【0015】
位置が正確なナビゲーション及びマッピングアプリケーションの制御を補助する安価で正確であり(精度が既知であり)且つ適切に分布する地上基準点は不足している。更に、先進運転支援システム(ADAS)は、そのようなシステムを制御するために道路に関する正確な3D位置情報を必要とする。これは、空中又は衛星画像を充分に正確に補正するために路面に沿うGCPの非常に密なネットワークを必要とする。これらのアプリケーションの場合、路面がオルソ画像において正確に位置決めされることが重要である。そのためには、路面に関する標高情報が必要とされ、特に、橋、堤防、高架幹線道路及び高架道路に関する路面情報が必要とされる。
【0016】
ジオ空間画像を校正及び補正するための地上基準製品の現状は、地球のほぼ全ての領域においてまばらであり且つ一貫性がない。以下のデータソースがジオ空間データの校正及び補正のために存在する。
【0017】
a)政府の地勢データセットから導出されたDEM/DTMデータ。しかし、これらのデータは精度が低く且つ古い場合が多い。更に、それらの品質は領域により大幅に異なる。
【0018】
b)航空機搭載/衛星レーダプラットフォームから導出されたDEM/DTM。これらは高価であり、多くの民間マッピング企業が興味を示さない広大な領域を範囲に含むことが多い。更に、これらは独自の正確なソースからの位置校正を依然として必要とする。現在、衛星プラットフォームはADASレベルの動作に対する精度条件を一貫して満たすデータを提供しない。
【0019】
c)高品質な測量グレードのGPSの地上基準点。これらは、1つの点当りのコストが高く、いくつかの国においては取得するために特別な許可を必要とする。更に、繰り返し実行する機会が極めて少ない。
【0020】
d)低品質なGPSの地上基準点(特定の目的向け/非測量グレード)。これらは、写真識別が不可能な場合が多く、すぐに使われなくなると考えられる。測地メタデータは、一貫性がなく且つ明確に定義されない場合がある。更に、点の場所は一般に適切に計画されていない。
【0021】
e)車両からのGPSの「軌道線」。これらは写真識別がほぼ不可能であり、車道の幅より高い精度を提供しない。第1に、それらを他の軌道線と相関させることは困難であり、特に交差点における微妙な走行パターンに基づいて異なる位置を与えるため、交通ノードを相関させられない。
【0022】
f)既存の空中画像製品。これらは、低品質の出力を検査/補正するのに有用であってもよい。しかし、ジオ空間データの生成において、これらは適切ではない。更に、これらは2D画像において容易に検出できない多くの局所誤差を有する。
【0023】
g)既存の政府又は民間のセンターライン地図。これらの地図は、抽象モデル化規格又はセンターラインデータである。そのようなデータ集合の精度プロファイルは一貫性がなく、標高データの品質が不十分である。
【0024】
少なくとも路面に適用する場合にGIS応用例に対する信頼性の高いデータソースとして測地参照データベースを使用するために、3次元における充分な精度で空中又は衛星画像をオルソ補正するための充分なGCP又は地上基準情報を含む測地参照データベースが必要とされる。
【0025】
本発明は、画像のオルソ補正、ベースマッピング、場所に基づくシステム、3D視覚化、地形マッピング、車両ナビゲーション、高度車両システム、ADAS、フライトシミュレーション、操縦室における状況認識等の多くのGIS応用例において使用されてもよい測地参照データベースを生成する代替の方法を提供することを目的とする。
【課題を解決するための手段】
【0026】
本発明によると、方法は、
地表を走行する車両に取り付けられたデジタルカメラ、レンジセンサ、並びにGPS及びIMUを含む位置判定手段により取り込まれ且つ同時に取り込まれた画像データ、レンジデータ及び地理座標系における関連する位置データを含むモバイルマッピングデータを取得するステップと、
画像データ、レンジデータ及び関連する位置データを処理することによりモバイルマッピングデータから線形静止地表特徴を判定するステップと、
画像データ、レンジデータ及び関連する位置データから地理座標系における線形静止地表特徴に対する3Dモデルを生成するステップと、
測地参照データベースを取得するためにデータベースに3Dモデルを格納するステップとを含む。
【0027】
本発明は、検知された空中画像及び衛星画像を正確にオルソ補正するためには位置が正確な地表の3Dモデルが必要であるという認識に基づく。更に、検知された画像と3Dモデルとの関係が判定される必要がある。DSM及びDEM等の現在の3Dモデルは、3D座標に関して地表を記述する。これらの3D座標は、上方から見た場合の地表に対応する関連する色値を有さない。従って、3Dモデル及び検知された画像を位置合わせできない。更に、市販の画像は画素サイズが5.0mであり、水平精度RSMEが2.0mであり、垂直精度RMSEが1.0mである。これらの解像度及び精度は、オルソ補正処理による更に精度の高いオルソ画像の生成を制限する。
【0028】
モバイルマッピング車両は、道路に基づく地表を走行する車両に取り付けられたデジタルカメラ、レーザ/レーダセンサ等のレンジセンサ、並びにGPS及びIMUを含む位置判定手段により取り込まれ且つ同時に取り込まれた画像データ、レーザ/レーダデータ及び地理座標系における関連する位置データを含むモバイルマッピングデータを取り込む。位置判定手段により、50cmの絶対水平精度及び1.5mの垂直精度で位置を判定できる。判定された関連する位置データと組み合わせたレーザ/レーダセンサにより、100mに対して50cmの相対水平精度及び100mに対して35cmの相対垂直精度で表面モデルを作成できる。より適切なハードウェア、すなわち更に密なレーザ群を提供する更に高速のレンジセンサを用いる場合、1cmの精度が達成可能である。
【0029】
モバイルマッピングデータの画像から線形静止地表特徴を判定できる。線形静止地表特徴は、道路区分、橋の上側、高架等であってもよい。本発明に係る線形静止地表特徴の特徴は、視覚的に検出可能なエッジ及び平滑な表面、すなわち不連続ではない表面を有するため表面がエッジ間の平坦面により近似可能であることである。これにより、地表特徴の平坦な表面の左側及び右側に対応する2つのポリラインにより線形地表特徴を記述する3Dモデルを使用できる。
【0030】
表面モデルは、画素サイズが2cmであり且つ100mに対する相対水平精度が50cmである地表のオルソ画像に画像データを変換するために使用されてもよい。表面モデルから得られる高さ情報は、100mに対して35cmの相対垂直精度を有する3Dオルソ画像を取得するためにオルソ画像の各画素に追加されてもよい。線形静止地表特徴、あるいは路面等の地上基準オブジェクトGCOが画像データから抽出され、画像のオルソ補正用データベースに3Dモデルとして格納されてもよい。静止地表特徴の特徴は、形状及びサイズを有するため、補正される画像において認識及び識別されることである。
【0031】
本発明に係る3D表面モデルの別の利点は、3Dモデルが表面及びエッジの双方を定義することである。エッジは、既存のDTM及びDSMの品質を向上するのに有用である。エッジを使用することにより、DEMの通常の格子パターンに限定されない位置に表面モデルにおける切断線を配置できる。表面モデルにおいて、現実の最適な近似を提供するために4つの隣接する測量点を三角形分割する方法は明確ではない。4つの点の三角形分割には、各々が異なる表面を定義する2つの可能な結果が存在する。ドロネー三角形分割において、三角形分割における三角形の全ての角度のうちの最小角が最大にされる結果が選択される。しかし、この結果は必ずしも現実の表面を表すのに最適な結果ではない。本発明に係る線形静止地表特徴の3Dモデル、すなわちエッジは、三角形分割を制御するための切断線として使用されてもよく、すなわち現実を最適に近似する4つの測量点の三角形分割の結果を選択するための切断線として使用されてもよい。3Dモデルは、GIS応用例においてそのような表面モデルを使用する場合又は空中画像を補正するために表面モデルを使用する場合に品質及び信頼性を向上するために既存のDTM又はDSMにおける更なる測量点として更に使用されてもよい。
【0032】
座標参照系における3Dモデルの位置情報が正確に既知であるため、画像の対応部分は正確に補正される。本発明により、GCOとして使用されてもよい大量の3Dモデルを容易に且つ短期間で生成できる。GCPを用いるデータベースより3Dモデルが有利である点は、3Dモデルが地表の一部をモデル化するのに対して、GCPが1つのXYZ座標のみを示す点である。GCPを用いるデータベースを使用する場合、GCP間の場所の標高情報を推測する必要があり、その結果、マッピングが不正確になる場合がある。方法は、地表の3Dモデルの取り込みを補助する。これらの点オブジェクトは、人間が地表を測定し且つモデル化するための標準的な測量方法を使用して手動でのみ収集されてもよく、それにより図2に示すような誤差を修正する。
【0033】
本発明に係る方法は、3つの分野、すなわち正確な位置判定、高解像度レーザ/レーダ又は地上ライダデータの処理及び高解像度画像の処理のうち最適なものを組み合わせる。レーザ/レーダデータ及び画像データの双方は、記録された表面からの距離が空中画像と比較して相対的に近い位置で取り込まれたデータを表すため、解像度及び精度が高い。そのため、より安価なデジタルカメラ及びレーザセンサを使用できる。
【0034】
線形静止地表特徴は、道路区分の路面、水路、陸橋等の明確に定義されたエッジを有する何らかの物理的特徴、橋、モバイルマッピングデータから3Dモデルを導出可能であり且つ空中又は衛星画像において写真識別可能な建造物の基線のうちの少なくとも1つを含むグループから選択された地球の表面における何らかの物理的視覚的線形特徴であってもよい。
【0035】
更なる一実施形態において、道路区分に対応する3Dモデルは連続線形基準ネットワークを取得するために連結され、連続線形基準ネットワークは測地参照データベースに格納される。連続線形基準ネットワークは地表の連続するシームレスな3Dモデルを提供し、これにより、道路区分に対応する画像領域を正確に補正できる。道路網は世界の大部分に沿って延在するため、本発明により、世界のほぼ全域の空中画像及び衛星画像をより正確に補正するために使用されてもよい正確な道路標高モデルを生成できる。特に、連続線形基準ネットワークにより画像内の道路のオルソ補正を大幅に向上できる。連続線形基準ネットワークは、市販のDSM及びDEMより最大で5倍高い解像度を有する道路及び道路構造の表面の非常に正確なDEM又はDSMを提供する。
【0036】
一実施形態において、線形静止地表特徴は、道路のセンターライン、道路の左エッジ、道路の右エッジ、道路の幅を含む特徴のグループから選択された道路区分の線形特徴に対応する。これらの特徴は、3Dモデルを記述するために使用される。3Dモデルは、道路のセンターライン、道路の左エッジ又は道路の右エッジであってもよく、オプションとしてそれらは道路の幅と組み合わされてもよい。路面を記述する3Dモデルは、道路の左エッジ及び道路の右エッジに基づいてもよい。3Dモデルは、空中又は衛星画像において識別されてもよい道路の形状を記述する。3Dモデルは、画像において識別可能な道路のエッジ及び線形塗装に対応するのが好ましい。3Dモデルに関連付けられた座標は、画像を補正するために使用可能である。更に、3Dモデルが表面、すなわち標高の偏差を正確に記述する場合、3Dモデルに対応する画像内の領域は非常に正確に補正可能である。更に、3DモデルはDTMの改良/向上に使用されてもよい。
【0037】
本発明の一実施形態において、線形静止地表特徴を判定する処理は、画像データにおいて路面を検出するステップと、画像データ、レンジデータ及び関連する位置データを組み合わせることにより地理座標系における路面のエッジ及びそれに関連する線形塗装の位置を抽出するステップと、路面の位置から線形静止地表特徴を算出するステップとを含む。3Dモデルは、座標参照系における線形静止地表特徴の大きさ及び位置を記述するベクトルに基づいてもよい。これは、空間構造を記述する効率的な方法である。
【0038】
一実施形態において、方法は、
画像データ及びレンジデータを組み合わせることにより3Dモデルに対するオルソ画像を生成するステップと、
オルソ画像の各画素に対して地理座標系における標高情報を判定するステップと、
3Dオルソ画像を取得するためにオルソ画像と標高情報とをリンクするステップと、
3Dオルソ画像を格納し且つ測地データベース内の各3Dモデルに画像をリンクするステップとを更に含む。これらの特徴により、3Dモデルの地表の可視特徴を用いて3Dモデルを向上できる。特徴は、3Dモデルの領域内の特定の点に関連する更なる正確な地上基準情報を提供する。可視特徴は静止地表特徴でもある。静止地表特徴又は道路区分の例は、「直前の『一時停止』の警告」等の道路標示、停止線、誘導矢印、横断歩道、幹線道路の出口における狭くなる道路のエッジライン、斜線標示、逆V字形標示等である。これらの道路標示は、補正される画像において対応する道路標示を検出するために使用可能な更なる地上基準情報として使用可能である。例えば3Dモデルにより表される長い直線道路区分は、3Dオルソ画像を用いずに道路区分の始点、終点及び経路に関する位置情報を提供する。道路が直線であるため、3Dモデルは補正される画像において道路区分に沿う画素の位置を検査するための道路区分に沿う充分な地上基準情報を提供しない。路面及び/又は道路標示を視覚化する3Dオルソ画像により、双方のソースから得られる写真識するために3Dオルソ画像に関連付けられた位置情報を使用する補正処理が可能になる。更に3Dオルソ画像により、道路標示の画像を用いることで、ナビゲーション及びマッピングアプリケーションの位置精度を向上するための適切に分布する地上基準点のネットワークを有することができる。本実施形態において、3Dモデルは、3Dモデルのオルソ補正された表面領域全体の色を表す1つの画像、オルソ画像のモザイク又はモデルに沿う写真識別可能なオブジェクトを表すより小さいオルソ画像の集合を含むことができる。
【0039】
本発明の更なる目的は、地上基準データベースに格納される内容をコンピュータにより実現されるシステムに生成させる方法を提供することである。
【0040】
本発明の更なる目的は、数値標高モデルの地理座標を修正する方法を提供することである。
【0041】
本発明の更なる目的は、空中又は衛星画像を補正する方法であって、
空中又は衛星画像を取得するステップと、
3Dモデルを含む測地参照データベースを取得するステップと、
測地参照データベースから1つ以上の3Dモデル及び対応する座標を検索するステップと、
画像において1つ以上の3Dモデルが空中又は衛星画像とマッチングする場所を見つけるステップと、
空中又は衛星画像を補正するために座標参照系における3Dモデルの位置を使用するステップとを含む方法を提供することである。例えば、道路区分の3Dモデルが地上基準点の集合より詳細且つ広範囲に地表を記述するため、3Dモデルにより補正処理を向上できる。方法は、オルソ補正された空中又は衛星画像を検査するため及びマッチングするが座標参照系において異なる座標を有する画像の部分を補正するために更に使用されてもよく、すなわちそのような部分を修正するために使用されてもよい。
【図面の簡単な説明】
【0042】
【図1】オルソ補正処理における歪みの原因を概略的に示す図である。
【図2】DEMを使用したオルソ画像を示す図である。
【図3】DSMを使用したオルソ画像を示す図である。
【図4】本発明に係る方法を示すフローチャートである。
【図5】本発明に係る方法を実現するコンピュータシステムの一例を示すブロック図である。
【図6】カメラ及びレーザスキャナを有するMMSシステムを示す図である。
【図7】場所及び姿勢パラメータを示す図である。
【図8】線形静止路面特徴の例を示す図である。
【図9】線形静止路面特徴をモデル化するための道路の特徴を示す図である。
【図10】更なる地上基準情報の例を示す図である。
【図11】空中又は衛星画像を補正する方法を示すフローチャートである。
【図12】DEMを修正する方法を示すフローチャートである。
【発明を実施するための形態】
【0043】
多くの好適な実施形態を使用し且つ添付の図面を参照して、本発明を以下により詳細に説明する。
【0044】
図4は、本発明に係る方法を概略的に示すフローチャートである。方法は動作400から開始し、モバイルマッピングデータを取得する。モバイルマッピングデータは、地表を走行する車両に取り付けられたデジタルカメラ、例えば、レーザスキャナであるレーザセンサ、並びにGPS及びIMUを含む位置判定手段により取り込まれ、同時に取り込まれた画像データ、レーザデータ及び地理座標系における関連する位置データを含む。モバイルマッピングデータを収集するための位置判定手段、レーザセンサ及びデジタルカメラを備える車両はモバイルマッピングシステムMMSと呼ばれる。位置判定手段は、少なくとも座標参照系における車両の位置を判定し且つオプションで車両の姿勢を判定するように構成される。尚、3Dモデル又は3D画像を生成するために使用可能なデータを取り込むために、レーザセンサの代わりにレイダ、ライダ及びレーダ等の他の何らかのレンジセンサが使用されてもよい。原則的に、データが6自由度の関連する正確な位置及び姿勢データを含む限り、どんな画像データ及びレンジデータが使用されてもよい。
【0045】
図6は、自動車20の形態をとるMMSシステムを示す。自動車20は、1つ以上のカメラ29(i)及び1つ以上のレーザスキャナ23(j)を備える。i=1、2、3、...Iであり、j=1、2、3、...Jである。1つ以上のカメラ29(i)の画角は、自動車21の走行方向に対してどの方向にあってもよく、従って、前方観察用カメラ、側方観察用カメラ又は後方観察用カメラ等であってもよい。カメラ29(i)の観察ウィンドウは車両前方の路面全体を範囲に含む。自動車21の走行方向とカメラの画角との間の角度は、両側において−45度〜+45度の範囲内にあるのが好ましい。自動車21は、運転者により関心道路に沿って運転される。
【0046】
自動車21は複数の車輪22を備える。更に、自動車21は高精度位置判定装置を備える。図6に示すように、位置判定装置は以下の構成要素を備える。
・アンテナ28に接続され、複数の衛星SLi(i=1、2、3、...)と通信し且つ衛星SLiから受信した信号から位置信号を算出するように構成されたGPS(全地球測位システム)ユニット。GPSユニットはマイクロプロセッサμPに接続される。GPSユニットから受信した信号に基づいて、マイクロプロセッサμPは、自動車1内のモニタ24に表示され且つ運転者に自動車が位置する場所及び場合によっては自動車が移動している方向を通知する適切な表示信号を判定してもよい。GPSユニットの代わりに、差動GPSユニットが使用されてもよい。差動全地球測位システム(DGPS)は全地球測位システム(GPS)の改良版であり、固定地上基準局のネットワークを使用して、衛星システムにより示された位置と既知の固定位置との間の差分を同報通信する。これらの局は、測定された衛星の擬似距離と実際の(内部で計算された)擬似距離との間の差分を同報通信し、受信局は自身の擬似距離を同一量分修正してもよい。
・DMI(距離測定計器)。この計器は、車輪22のうちの1つ以上の車輪の回転数を検知することにより、自動車21が移動した距離を測定する走行距離計である。GPSユニットからの出力信号から表示信号を算出する際にマイクロプロセッサμPがDMIにより測定された距離を考慮できるようにするために、DMIもマイクロプロセッサμPに接続される。
・IMU(慣性測定ユニット)。そのようなIMUは、3つの直交方向に沿う回転加速度及び並進加速度を測定するように構成される3つのジャイロユニットとして実現可能である。GPSユニットからの出力信号から表示信号を算出する際にマイクロプロセッサμPがDMIによる測定値を考慮できるようにするために、IMUもマイクロプロセッサμPに接続される。IMUは、推測航法センサを更に含んでもよい。
【0047】
尚、車両及び機器(これらは、車両の基準位置及び姿勢を参照して既知の位置及び姿勢を用いて取り付けられる)の正確な場所及び姿勢を提供するためのグローバルナビゲーション衛星システム、車載慣性システム及び車載推測航法システムの多くの組み合わせが当業者により見つけられる。
【0048】
図21に示すようなシステムは、例えば自動車21に取り付けられた1つ以上のカメラ29(i)を用いて写真を撮影することにより地理データを収集するいわゆる「モバイルマッピングシステム」である。カメラ29(i)はマイクロプロセッサμPに接続される。自動車前方のカメラ29(i)は立体カメラであってもよい。カメラは、画像が既定のフレーム速度で取り込まれた画像シーケンスを生成するように構成されてもよい。好適な一実施形態において、カメラの1つ以上は、自動車21の既定の変位毎又は時間間隔毎に写真を取り込むように構成されたスチルカメラである。カメラ29(i)はμPに画像を送出する。一実施形態において、モバイルマッピング車両は3つのカメラを備える。そのうちの1つは前方観察用カメラであり、両側のカメラは、車両の進行方向に対して30〜60度の範囲にあり好ましくは45度である観察軸を有する。その場合、前方観察用カメラは路面上方の道路指示を検出するのに特に適した画像を取り込み、側方観察用カメラは道路に沿った道路標識等のオブジェクトを検出するのに特に適した画像を取り込む。
【0049】
更にレーザスキャナ23(j)は、自動車21が関心道路に沿って走行している間にレーザサンプルを取得する。従って、レーザサンプルはそれらの関心道路に関連する環境に関するデータを含み、路面、建物群、樹木、交通標識、駐車車両、人間、方向案内標識、道路の側部等に関するデータを含んでもよい。レーザスキャナ23(j)もマイクロプロセッサμPに接続され、それらのレーザサンプルをマイクロプロセッサμPに送出する。
【0050】
一般に、3つの測定ユニット、すなわちGPS、IMU及びDMIから可能な限り正確な場所及び姿勢の測定値を提供することが望まれる。これらの場所及び姿勢データは、カメラ29(i)が写真を撮影し且つレーザスキャナ23(j)がレーザサンプルを取得する間に測定される。写真及びレーザサンプルの双方は、後で使用するために、これらの写真が撮影されたのと同時に収集された自動車21の対応する場所及び姿勢データと関連付けてμPの適切なメモリに格納される。写真は、例えば路面、建物群、樹木、交通標識、駐車車両、人間、方向案内標識、記念碑等に関する視覚情報を含む。レーザスキャナ23(j)は、道路情報に沿う3D表現において視覚化するのに充分な密度のレーザスキャナ点群を提供する。一実施形態において、レーザスキャナ23(j)は、方法に対して充分な密度の出力を生成するために、最小35Hz及び1度の解像度を有する出力を生成するように構成される。SICKにより製造されるMODEL LMS291−S05等のレーザスキャナは、そのような出力を生成できる。レーザスキャナの最小限の構成は、自動車21の前方又は後方を見下ろし且つ自動車が走行している路面を検知する1つのレーザスキャナを有することである。最適な構成は、自動車21の左側又は右側の領域を走査する1つ又は2つのレーザスキャナ及び自動車21の後方又は前方を見下ろす1つのレーザスキャナを有することである。後者のレーザスキャナは、自動車21の走行方向に対して平行な回転走査軸を有する。他のレーザスキャナは、自動車21の走行方向に対して45度の角度の回転軸を有する。未公開の国際出願第PCT/NL2007/050541号において、2つのレーザスキャナが異なる瞬間に同一の表面を走査する構成を使用することの更なる利点が開示される。尚、レーザスキャナの代わりに、距離情報又は密な点群を提供する他の何らかのレンジセンサが使用されてもよい。
【0051】
図7は、図6に示す3つの測定ユニットであるGPS、DMI及びIMUから取得可能な位置信号を示す。図7は、マイクロプロセッサμPが6つの異なるパラメータ、すなわち所定の座標系における原点に関する3つの距離パラメータx、y、z、並びにx軸、y軸及びz軸に関する回転をそれぞれ示す3つの角度パラメータωx、ωy及びωzを算出するように構成されることを示す。z方向は重力ベクトルの方向と一致するのが好ましい。グローバルUTM又はWGS84座標系が所定の座標参照系として使用されてもよい。尚、本発明に係る方法は、NAD83及び他のナショナルグリッドシステム等のローカル座標参照系と共に使用可能である。6つの異なるパラメータは、車両の位置及び姿勢を同時に追跡するために必要なMMSプラットフォームの6つ(x、y、標高、進行方向、横揺れ、縦揺れ)の位置決め及び姿勢を提供する。カメラ及びレーザスキャナは、自動車21に対して固定された位置及び姿勢を有する。これにより、画像又はレーザサンプルを取得した時点での座標参照系における各レーザサンプルの位置、並びに座標参照系におけるカメラの位置及び姿勢を6つのパラメータから正確に判定できる。
【0052】
動作402において、線形地表特徴が画像データにおいて検出される。線形静止地表特徴は、例えば、道路区分の路面のエッジ、2つの領域間に明確に定義された視覚的エッジを有する何らかの物理的特徴、並びに3Dモデルがモバイルマッピングデータから導出可能であり且つ空中又は衛星画像において写真識別可能である他の何らかの地表特徴である地表におけるどんな物理的視覚的線形特徴であってもよい。
【0053】
動作404において、選択された線形静止地表特徴の座標参照系における位置がMMSデータの画像データ、レーザデータ及び位置データから抽出される。動作406において、3Dモデルが選択された線形地表特徴に対して生成され、動作408において、3Dモデルは測地参照データベースに格納される。
【0054】
動作402、404及び406を実現できる多くの実現例が存在する。対応する動作を実行するための適切な方法及びアルゴリズムは当業者には既知である。1つの手法は、MMSデータからの画像を個別に処理し、画像データ、レーザデータ及び位置データを組み合わせることにより特徴の3D位置情報を抽出することである。同一の線形特徴が2つ以上の画像に延在する場合、線形特徴をモデル化するために対応する画像の3D位置情報を組み合わせる必要がある。
【0055】
本発明によると、MMSデータからの画像はオルソモザイクを取得するために処理される。オルソモザイクは、モバイルマッピングシステムの軌道線の一部に沿う地表のオルソ補正図を視覚化する。大部分の例において、オルソモザイクは、路面、舗道及び道路に沿う道路の側部の一部を表す。埠頭及び堤防等の建造物により定義された水涯を取り込むために、モバイルマッピングシステムは水路を航行する船舶であってもよい。
【0056】
国際出願第WO08044927号において、モバイルマッピング画像からオルソタイル及びモザイクを生成する方法が開示される。画像は、モバイルマッピング車両の前方の路面を表す仮想平面上に投影される。路面の実表面モデルは、レーザデータから容易に導出可能である。当業者は、オルソ画像を生成するために、仮想平面の代わりにレンジデータを処理することにより取得された実表面モデル上に画像を投影するために第WO08044927号において開示された方法を容易に適用できる。実表面モデルの位置が既知であるため、地理参照系におけるXY位置の次に、各画素に対する標高情報も画像データ及びレーザデータから容易に導出され、オルソモザイクにリンクされる。尚、本出願において、オルソ画像は、各画素に対して座標参照系におけるxy座標を定義するメタデータを含む画像を意味する。xy座標は、地球の3Dモデルを定義するジオイド上の位置である。更に、各画素値は、xy位置における地表の姿勢に対して垂直視した場合の地表、すなわち地表モデルの地表を表すと考えられる。
【0057】
標高情報は、「実世界」の表面のxy位置の高さと前記xy位置における地球の3Dモデルを定義するジオイドにより仮定される高さとの間の差分を定義する。
【0058】
上述のように取得されたオルソ画像は、道路区分等の線形特徴を検出し且つ前記線形特徴の座標参照系における位置を抽出するのに非常に適している。オルソ画像から線形参照画像を生成できる。線形参照画像は、特定の列がモバイルマッピング車両の軌道線に対応し且つ画素の各行が軌道線に対して垂直な線に沿う地表を表す画像である。未公開の国際出願第PCT/NL2007/050477号において、モバイルマッピングデータから線形参照画像を生成する方法が開示される。線形参照画像において、湾曲道路は直線道路として視覚化される。直線道路の場合、センターライン、道路の左エッジ、道路の右エッジ、道路の幅及び線形道路標示等の道路区分の特徴の判定はより容易である。未公開の国際出願第PCT/NL2007/050159号において、オルソ画像から道路の幅及びセンターラインのデータを生成するシステム及び方法が開示され、これは使用するのに適している。未公開の国際出願第PCT/NL2007/050569号において、道路が画像において既知の姿勢を有する画像から線形車線情報データを生成するシステム及び方法が開示される。前記出願により、線形参照画像において線形道路標示を正確に検出できる。
【0059】
前段落から、画像において対応する位置を判定するため及び座標参照系における対応するXY位置を算出するためにモバイルマッピングデータから線形特徴を検出するために複数の方法が使用可能であることは明らかである。リンクされた標高情報と組み合わせることにより、線形特徴の3Dモデルを容易に生成できる。3Dモデルはベクトルに基づくモデルであるのが好ましい。
【0060】
道路区分は異なる方法でモデル化可能である。図9はいくつかの例を示す。3Dモデルは、道路のセンターライン92、舗装のエッジ90、法定エッジ91、すなわち車道線の左エッジ及び右エッジ又はそれらの何らかの組み合わせに関して道路区分を記述してもよい。尚、道路のセンターラインは道路のエッジ間の中間点又は道路のセンターラインを示す道路標示であってもよい。アプリケーションにおいて3Dモデルを使用する場合、使用される定義が既知である必要がある。一実施形態において、線形特徴はポリラインにより記述される。コンピュータグラフィックスにおいて、ポリラインは1つ以上の線分から成る連続した線である。ポリラインは各線分の端点により指定される。一実施形態において、1つのポリラインは道路区分を記述するために使用される。更に、xy平面における道路区分の方向に対して垂直な道路の幅及び傾斜が路面のサイズ/幅及び形状を記述するために追加されてもよい。別の実施形態において、道路区分は、舗装されたエッジに対応する2つのポリラインにより記述される。更に、道路のセンターラインに対応するポリラインが追加されてもよい。道路区分の路面の形状は、道路区分を記述する道路のセンターライン、舗装されたエッジ又はエッジラインを記述するために使用された線のいずれかを介する僅かに隆起した表面により定義されてもよい。一般に、路面は、例えば左エッジライン及び右エッジラインである2つのポリライン間の最短線により近似可能である。
【0061】
図8は、例として道路のセンターライン81及びエッジライン80に対応する線を示す。更に、図8は第1の道路区分82、第2の道路区分83及び第3の道路区分84を示す。第1の道路区分82は、幹線道路の道路区分の出口までの最後の部分に対応する。第2の道路区分83は2つの幹線道路の間の相互連結に対応し、第3の道路区分84は別の幹線道路の区分の開始部分に対応する。3Dモデルが標高情報を含むため、第1の道路区分82は第3の道路区分84の下側になり、第2の道路区分83は第1の道路区分82の高さから第3の道路区分84の高さまで徐々に高さが変化する。これは、空中又は衛星画像を正確に補正するのに有用な情報である。更に、第2の道路区分の傾斜及び曲率はADASアプリケーションに対する重要な情報を提供する。
【0062】
3Dモデルは、レーザデータから導出されるDSMによりエッジライン間の路面の表面を更に記述してもよい。このDSMは、航空機搭載又は衛星プラットフォームから導出される現在のDSM又はDEMよりはるかに密なレーザ点格子を有する。そのようにして取得されたDSMは、より正確で密な標高情報を用いて航空機搭載又は衛星プラットフォームからのDSM/DEMを局所的に強化するために使用されてもよい。
【0063】
道路区分の3Dモデルはデータベースに格納される。動作410において、道路区分の3Dモデルは、連続基準ネットワークを形成するために互いに連結される。ネットワークのノードは分岐点に対応し、ネットワークのブランチは分岐点の間の道路区分又は分岐点に接続される道路区分に対応する。動作412において、連続線形基準ネットワークは地理参照データベースに格納される。ネットワークは、データベースからある地域の路面のDSMを容易に抽出する手段を提供する。ネットワークの特徴は、複数の道路区分が道路網の連続するシームレスなDSMからの分岐点において接触することである。これは、道路区分が同一のデータソース、すなわち同一のモバイルマッピングセッションから導出される場合に保証される。
【0064】
画像データは主に、最初に画像において路面の場所を判定するために使用され、画像における場所及びレーザデータを組み合わせることにより座標参照系における路面の位置を判定するために使用される。しかし、画像データは、道路標示、路面のテクスチャ及び色、舗装の種類、路肩等を示す路面の「実世界」の外観を用いて3Dモデルを向上するために更に使用可能である。更に、それらの標示は、道路区分の完全な位置決め及び/又は補正を可能にするための密なGCPアレイを形成できる。動作414において、オルソ画像が線形特徴に対して生成される。上述のように、動作402〜406において、路面のオルソ画像又はモザイクは既に生成されている。従って、動作414は3Dモデルに対するオルソ画像を構成するためにオルソ画像の対応する領域又は画素を選択することに限定される。オプションとして、動作416において、標高情報が3Dモデルに対するオルソ画像の各画素に関連付けられる。線形特徴が道路区分である場合、路面はエッジライン間の平坦な表面により近似可能である。標高情報はエッジライン間の補間技術により導出可能である。動作418において、オルソ画像と標高情報とをリンクすることにより、3Dオルソ画像が生成される。動作420において、3Dオルソ画像は対応する3Dモデルへのリンクと共に地理参照データベースに格納される。
【0065】
従って、一実施形態において、3Dモデルは、ポリラインにより記述された対応する道路区分のオルソ画像を更に含む。オルソ画像は、画像データ、レンジデータ及び位置/姿勢データから正確に導出可能である。上述の処理から作成されたオルソ画像は、空中又は衛星画像の補正処理を向上するため及び補正済みの空中又は衛星画像を修正/向上するための参照画像として使用可能である。道路のセンターライン、破線、停止線等の道路標示は、補正/修正される画像においてマッチングするものを見つけるために使用可能である。これは、道路区分に沿う画像を補正/修正するための更なる地上基準点を提供する。レーザデータは、3Dモデルに関連付けられるオルソ画像の各画素に標高情報を割り当てるために更に使用されてもよい。標高情報は、補正される画像が取り込まれる位置から見た視界に対応する画像においてオルソ画像を変換するために使用されてもよい。これにより、補正処理におけるマッチング処理の精度が向上し、誤ったマッチングの可能性が低下する。
【0066】
尚、標高情報を含む3Dオルソ画像のサイズは路面の領域に限定されるべきではない。それは、画像データ及びレンジデータから導出可能な道路回廊内の地表全体のオルソ補正図を表してもよい。
【0067】
尚、道路区分に対する3Dオルソ画像の代わりに、画像チップが生成されてもよい。画像チップは静止地表特徴の表現である。静止路面特徴の例は、停止線、「直前の『一時停止』の警告」、誘導矢印、下水道の鉄格子、制限速度、横断歩道、出口における狭くなる道路のエッジライン、急峻な湾曲エッジ、マンホールの鉄蓋及び図9の他の何らかの方向指示90である。他の路面特徴は、斜線標示又は逆V字形標示、折り返し矢印、分岐矢印である。Traffic Signs Manual 2003、第5章、Road Markings、ISBN 0 11 552479 7は、使用可能な道路標示の概要を提供する。図10は、「直前の『一時停止』の警告」100、斜線標示102、停止線104及び方向指示106を示す。更に、他の何らかの道路の塗装、舗装の種類の明確な変化、記念碑の台座、低部に位置する特有の地質学的特徴が画像チップを生成するために使用されてもよい。
【0068】
画像チップは、オルソ画像から取得された静止地表特徴のスナップショット画像と、座標参照系におけるXY位置を表すメタデータと、高さ情報の標高とを含む。画像チップの少なくとも1つの画素は、座標参照系における画像チップの位置を定義するための関連する位置情報を有する必要がある。これは、関連付けられる3Dモデルに対する相対位置であってもよい。オプションとして、画像チップは、画像チップの手動検査を可能にするために元のオルソ画像、タイル又はモバイルマッピングセッションの画像に対する参照を有してもよい。画像チップの各画素は、座標参照系における関連する標高情報を含んでもよい。その場合、画像チップは3Dオルソ画像でもある。画像チップのサイズは、静止路面特徴のサイズ及び画素のサイズに依存する。1つの画素は3〜15cm×3〜15cmの領域を表し且つ座標参照系において50cmより高い絶対水平解像度及び1.5mより高い絶対垂直解像度を有するのが好ましい。データベースにおける解像度は、画像データ、レンジデータ及び位置/姿勢データの精度/解像度、並びにデータベースが意図される適用例に依存する。
【0069】
画像チップは対応する3Dモデルへのリンクを与えられ、測地参照データベースに格納される。画像チップは、空中又は衛星画像において見つけられるGCPとして使用可能であり、空中又は衛星画像において3Dモデルとマッチングする場所を見つける直接処理に使用可能である。
【0070】
本発明に係る方法は、相対的に安価なデジタルカメラ、レーザセンサ及び位置判定手段を備えてもよい相対的な安価な車両により取り込まれたデータから測地参照データベースを生成する。方法は、オルソ補正処理において地上基準オブジェクトとして使用可能である写真識別可能なデータの集合を作成する。本発明により、従来の地上基準製品より数桁多い地上基準オブジェクト及びGCPの大量収集が可能である。方法は、全ての測地次元において一貫性があり且つ検査可能な精度プロファイルを有する。方法は、今後の空中画像のオルソ補正に使用するために最初に現場において特定の写真識別可能な地表の印を作成する必要がない。更に、データベースは今後長期間存在すると考えられる写真識別可能な物質を多く含む。データベースが3D情報を含むため、これは3D表面モデルを修正するために更に使用可能である。
【0071】
MMSデータを使用することの別の利点は、1つのモバイルマッピングセッションにおいて、画像データ及びレーザデータが分岐点を2回以上横断するか又は道路区分を2回以上移動する場合に地表の領域を2回以上記録することである。これらの領域は、地上基準オブジェクトとして使用可能な静止路面特徴を含んでもよい。実際、静止路面特徴は座標参照系において同一の場所を有する。しかし、位置決め判定は1つのモバイルマッピングセッションにおいて何らかの絶対的及び相対的な誤りを有する場合がある。本発明に係る方法はこれらの線形静止路面特徴を2回以上選択し、対応するXY位置及び標高情報であるZ座標は毎回判定される。判定された各線形静止路面特徴に対して、3Dモデルと、XYZ位置を記述するメタデータと、オプションで元のオルソ画像に対する参照とがデータベースに記録される。同一の線形地表特徴に関する記録を解析することにより、重複する情報がデータベースから除去される。例えば、同一の線形静止路面特徴の画像及びメタデータを組み合わせることにより、すなわちそれらを平均するか又は異常を排除することにより、重複する情報が除去される。XY位置及び標高情報を平均することにより、XYZ座標に対する平均値を有するメタデータが3Dモデルに対して算出可能である。一般に、平均値は座標参照系における3Dモデルの位置を更に正確に定義する。
【0072】
図5において、本発明を実現するのに適したコンピュータ構成500の概略が示される。コンピュータ構成500は、算術演算を実行するプロセッサ511を備える。プロセッサ511は、ハードディスク512、読み出し専用メモリ(ROM)513、電気的消去可能プログラマブル読み出し専用メモリ(EEPROM)514及びランダムアクセスメモリ(RAM)515を含む複数のメモリ構成要素に接続される。メモリ構成要素は、本発明に従って空間データ変更メッセージを生成する方法又は空間データ変更メッセージを処理する方法をプロセッサ511に実行させるように構成されたデータ、すなわち命令を含むコンピュータプログラムを含む。必ずしもこれらメモリの種類の全てを設ける必要はない。更に、これらのメモリ構成要素はプロセッサ511に物理的に近接して配置される必要がなく、プロセッサ511から離れて配置されてもよい。方法に関連する入力データ及び出力データは、コンピュータ構成500の一部として格納されてもよく、あるいはそのように格納されなくてもよい。例えば、入力データはウェブサービスを介してアクセスされてもよい。別のプロセッサ上で実行中の処理により動作を実行することも可能である。
【0073】
プロセッサ511は、ユーザにより命令、データ等を入力する手段、例えばキーボード516及びマウス517に更に接続される。当業者には既知であるタッチスクリーン、トラックボール及び/又は音声変換器等の他の入力手段が更に設けられてもよい。
【0074】
プロセッサ511に接続された読み取りユニット519が設けられてもよい。読み取りユニット519は、フロッピディスク520又はCDROM521等の取り外し可能なデータ記憶媒体又は取り外し可能な記憶媒体からデータを読み取り且つ場合によってはそれらにデータを書き込むように構成される。当業者には既知であるように、他の取り外し可能なデータ記憶媒体は、テープ、DVD、CD−R、DVD−R、メモリスティック、固体メモリ(SDカード、USBスティック)コンパクトフラッシュ(登録商標)カード、HD DVD、ブルーレイ等であってもよい。
【0075】
プロセッサ511は、紙上に出力データを印刷するためのプリンタ523及びディスプレイ518、例えばモニタ又はLCD(液晶ディスプレイ)画面、ヘッドアップディスプレイ(フロントガラスに投影される)、あるいは当業者には既知である他の何らかの種類のディスプレイに更に接続されてもよい。
【0076】
プロセッサ511は、スピーカ529に接続され且つ/あるいはグラフィック文書及び他の文書を走査するように構成されたデジタルカメラ/ウェブカム又はスキャナ等の光学読取り装置531に接続されてもよい。
【0077】
更にプロセッサ511は、I/O手段525により例えば公衆交換電話網(PSTN)、ローカルエリアネットワーク(LAN)、ワイドエリアネットワーク(WAN)、無線LAN(WLAN)、GPRS、UMTS、インターネット等である通信ネットワーク527に接続されてもよい。プロセッサ511は、ネットワーク527を介して他の通信構成と通信するように構成されてもよい。
【0078】
データ記憶媒体520、521は、本発明に従って方法を実行する能力をプロセッサに提供するように構成されたデータ及び命令の形態のコンピュータプログラムを含んでもよい。しかし、そのようなコンピュータプログラムは電気通信ネットワーク527を介してメモリ構成要素にダウンロードされてもよい。
【0079】
プロセッサ511は、独立型システムとして実現されてもよく、各々がより大きなコンピュータプログラムのサブタスクを実行するように構成された複数の並列プロセッサとして実現されてもよく、あるいは複数のサブプロセッサを有する1つ以上のメインプロセッサとして実現されてもよい。本発明の機能性の一部は、電気通信ネットワーク527を介してプロセッサ511と通信するリモートプロセッサによって実行されてもよい。
【0080】
図5のコンピュータシステムに含まれる構成要素は、汎用コンピュータシステムにおいて通常見られる構成要素であり、当業界において既知であるそのようなコンピュータ構成要素の広範な種類を表すことを意図する。
【0081】
従って、図5のコンピュータシステムは、パーソナルコンピュータ、ワークステーション、ミニコンピュータ、メインフレームコンピュータ等であってもよい。コンピュータは、異なるバス構成、ネットワーク化プラットフォーム、マルチプロセッサプラットフォーム等を更に含むことができる。UNIX(登録商標)、Solaris、Linux、Windows(登録商標)、Macintosh OS及び他の適切なオペレーティングシステムを含む種々のオペレーティングシステムが使用可能である。
【0082】
図11は、空中又は衛星画像を補正する方法を示すフローチャートである。動作1100において、空中又は衛星画像が取得される。オルソ画像は実行されたオルソ補正処理により生じた修正不能な歪みを含むか又は補正処理の実行時に更なる歪みを生じさせる場合があるため、画像は透視投影画像のオルソ画像ではなく透視投影画像であるのが好ましい。動作1102において、本発明により取得された3Dモデルを含む測地参照データベースが取得される。動作1104において、3Dモデルが測地参照データベースから検索される。補正される画像の範囲に含まれると予測される3Dモデルのみが選択されるのが好ましい。動作1106において、3Dモデルとマッチングする場所が画像において探索される。3Dモデルは、写真識別可能な領域の境界を記述する。従って、対応するマッチング領域が画像において見つけられてもよい。3Dモデルのオルソ補正図がマッチング領域を見つけるために使用されてもよい。
【0083】
通常、空中又は衛星画像を取得するデジタルカメラの位置は座標参照系において既知である。そのため、3Dモデルをデジタルカメラの位置から見た場合の透視投影画像に変換でき、画像において対応する場所を見つけることができる。この変換により、画像において正確な場所を見つける成功率が向上する。場所を見つけた後、隣接する3Dモデルは画像において対応する場所を見つけるために使用される。この処理は、隣接する3Dモデルが画像の範囲外になるまで繰り返される。このように、3Dモデルと画像内の対応する場所との間の関係は、動作1108において画像を補正するための入力を提供する。マッチングする各3Dモデルは地上基準オブジェクトとして使用される。ここで、透視投影画像により視覚化された地表の仮定された領域の範囲内に含まれる場所を有する全ての3Dモデルは、画像が投影されるDSMとして使用される。対応する3Dモデルと組み合わされた画像内のマッチングする場所により、前記マッチングする場所に対応する画像の部分を正確にオルソ補正できる。ネットワークを形成する3Dモデルの範囲に含まれない領域は、周知の補正アルゴリズムにより補正可能である。
【0084】
図12は、DEMを修正する方法を示すフローチャートである。動作1200において、修正される数値標高モデル又は数値表面モデルが取得される。動作1202において、測地参照データベースが取得される。動作1204において、1つ以上の3Dモデルが測地参照データベースから検索される。動作1206において、1つ以上の3Dモデルが数値標高モデルとマッチングする場所を探索する。動作1208において、3Dモデルの座標参照系における座標とDEMにおける場所との間の偏差が判定される。偏差は、誤差の種類を判定するために解析される。誤差は、平行移動誤差、変倍誤差、局所誤差であってもよい。動作1210において、数値標高モデルは解析結果、すなわち誤差の種類に基づいて修正される。DEMを修正する方法は、地表を表す色情報を含むDEMの三角形分割を向上するように更に構成されてもよい。DEMはラスタ(複数の正方形から成る格子)又は不規則三角網として表現されてもよい。ドロネー三角形分割を使用する場合、三角形分割における全ての角度のうちの最小角が最大にされる。それらは、鋭角三角形を回避する傾向がある。しかし、4つの点により形成される四角形は2つの三角形分割が可能である。動作1210は、三角形分割を制御する切断線として平坦であるか又は僅かに隆起した表面を有する道路区分の外エッジを記述する3Dモデルを使用するように更に構成される。道路区分を表す3Dモデルは、僅かに隆起した表面領域の外エッジを記述する。一実施形態において、切断線はDEMに更なる標高を追加するために使用され、三角形分割は前記更なる点を使用する。別の実施形態において、動作1210は、2つの可能な三角形分割のうち3Dモデルにより定義された表面に最適に対応する一方を選択するように構成される。
【0085】
本発明に係る測地データベースは、道路区分を表す3Dモデルに対応する密な点ネットワークをDEM/DSMに追加することにより、前記DEM/DSMを局所的に向上するために更に使用されてもよい。3Dモデルは、DEM/DSMの対応部分を置き換えるために更に使用されてもよい。これは、ADASアプリケーション等のナビゲーションアプリケーションにおいて使用されてもよいDEM/DSMを提供する。
【0086】
本発明の上述の詳細な説明は、例示及び説明のために与えられた。これは、全ての実施形態を含むこと又は本発明を開示される形態に限定することを意図せず、上記の教示を鑑みて多くの変更及び変形が可能であることは明らかである。説明された実施形態は、本発明の原理及びその実際の用途を最適に説明し、それによって他の当業者が考えられる特定の使用に適した種々の変形例を伴い且つ種々の実施形態において本発明を最適に利用できるようにするために選択された。本発明の範囲は、添付の請求の範囲により定義されることが意図される。
【特許請求の範囲】
【請求項1】
測地参照データベースを生成する方法であって、
地表を走行する車両に取り付けられたデジタルカメラ、レンジセンサ及び位置判定手段により取り込まれ且つ同時に取り込まれた画像データ、レンジデータ及び地理座標系における関連する位置データを含むモバイルマッピングデータを取得するステップと、
前記画像データ、前記レンジデータ及び前記関連する位置データを処理することにより前記モバイルマッピングデータから線形静止地表特徴を判定するステップと、
前記画像データ、前記レンジデータ及び前記関連する位置データから前記地理座標系における前記線形静止地表特徴に対する3Dモデルを生成するステップと、
前記測地参照データベースを取得するためにデータベースに前記3Dモデルを格納するステップとを含むことを特徴とする方法。
【請求項2】
連続線形基準ネットワークを取得するために前記3Dモデルを連結するステップと、
前記測地参照データベースに前記連続線形基準ネットワークを格納するステップと
を更に含むことを特徴とする請求項1記載の方法。
【請求項3】
前記線形静止地表特徴は、
道路のセンターライン、道路の左エッジ、道路の右エッジ、道路の幅を含む特徴のグループから選択された道路区分の線形特徴に対応する
ことを特徴とする請求項1又は2記載の方法。
【請求項4】
線形静止地表特徴を判定するステップは、
前記画像データにおいて路面を検出するステップと、
前記画像データ、前記レンジデータ及び前記関連する位置データを組み合わせることにより前記地理座標系における前記路面の位置を抽出するステップと、
前記路面の前記位置から前記線形静止地表特徴を表す1つ以上のポリラインを算出するステップと
を含むことを特徴とする請求項1から3のいずれか1項に記載の方法。
【請求項5】
前記3Dモデルは、ベクトルに基づく
ことを特徴とする請求項1から4のいずれか1項に記載の方法。
【請求項6】
画像データ及びレンジデータを組み合わせることにより前記3Dモデルに対するオルソ画像を生成するステップと、
前記オルソ画像の各画素に対して前記地理座標系における標高情報を判定するステップと、
3Dオルソ画像を取得するために前記オルソ画像と前記標高情報とをリンクするステップと、
前記3Dオルソ画像を格納し且つ前記測地データベース内の各3Dモデルに前記画像をリンクするステップと
を更に含むことを特徴とする請求項1から5のいずれか1項に記載の方法。
【請求項7】
線形静止地表特徴を表す3Dモデルを含む測地参照データベースであって、前記3Dモデルは、請求項1から6のいずれか1項に記載の方法により生成されたものである測地参照データベース。
【請求項8】
前記3Dモデルを連結することにより構成された連続線形基準ネットワーク
を更に含むことを特徴とする請求項7記載の測地参照データベース。
【請求項9】
各々が3Dモデルにより表現される前記地表の少なくとも一部を表す複数のオルソ画像を更に含み、オルソ画像の各画素は関連する標高情報を含む
ことを特徴とする請求項7又は8記載の測地参照データベース。
【請求項10】
数値標高モデルの三角形分割を向上する方法であって、
前記数値標高モデルを取得するステップと、
請求項7記載の測地参照データベースを取得するステップと、
前記測地参照データベースから僅かに隆起した表面領域の外エッジを記述する3Dモデルを検索するステップと、
前記数値標高モデルにおいて前記3Dモデルがマッチングする場所を見つけるステップと、
前記三角形分割を制御するための切断線として前記僅かに隆起した表面領域の前記外エッジを使用するステップと
を含むことを特徴とする方法。
【請求項11】
数値標高モデルの地理座標を修正する方法であって、
前記数値標高モデルを取得するステップと、
請求項7記載の測地参照データベースを取得するステップと、
前記測地参照データベースから1つ以上の3Dモデルを検索するステップと、
前記3Dモデルが前記数値標高モデルとマッチングする場所を見つけるステップと、
前記数値標高モデルにおける前記見つけられた場所の位置と前記1つ以上のブランチに関連する前記座標との間の位置偏差を判定するステップと、
前記数値標高モデルの前記地理座標を修正するために前記位置偏差を使用するステップと
を含むことを特徴とする方法。
【請求項12】
空中又は衛星画像を補正する方法であって、
空中又は衛星画像を取得するステップと、
請求項8記載の測地参照データベースを取得するステップと、
前記測地参照データベースから1つ以上の3Dモデル及び対応する座標を検索するステップと、
前記画像において前記1つ以上の3Dモデルが前記空中又は衛星画像とマッチングする場所を見つけるステップと、
前記空中又は衛星画像を補正するために前記座標参照系における前記3Dモデルの位置及び対応する見つけられた場所を使用するステップと
を含むことを特徴とする方法。
【請求項13】
プロセッサ(511)と、前記プロセッサに接続され且つ請求項1から6及び10から12のいずれか1項に記載の方法を前記プロセッサ(511)に実行させるように構成されたデータ及び命令を含むコンピュータプログラムを含むメモリ(512、513、514、515)とを備えるコンピュータにより実現されるシステム。
【請求項14】
コンピュータ構成によりロード可能であり且つ請求項1から6及び10から12のいずれか1項に記載の方法を前記コンピュータ構成に実行させる前記データ及び命令を含むコンピュータプログラム。
【請求項15】
コンピュータ構成によりロード可能であり且つ請求項1から6及び10から12のいずれか1項に記載の方法を前記コンピュータ構成に実行させるデータ及び命令を含むコンピュータプログラムを備えるプロセッサ可読媒体。
【請求項1】
測地参照データベースを生成する方法であって、
地表を走行する車両に取り付けられたデジタルカメラ、レンジセンサ及び位置判定手段により取り込まれ且つ同時に取り込まれた画像データ、レンジデータ及び地理座標系における関連する位置データを含むモバイルマッピングデータを取得するステップと、
前記画像データ、前記レンジデータ及び前記関連する位置データを処理することにより前記モバイルマッピングデータから線形静止地表特徴を判定するステップと、
前記画像データ、前記レンジデータ及び前記関連する位置データから前記地理座標系における前記線形静止地表特徴に対する3Dモデルを生成するステップと、
前記測地参照データベースを取得するためにデータベースに前記3Dモデルを格納するステップとを含むことを特徴とする方法。
【請求項2】
連続線形基準ネットワークを取得するために前記3Dモデルを連結するステップと、
前記測地参照データベースに前記連続線形基準ネットワークを格納するステップと
を更に含むことを特徴とする請求項1記載の方法。
【請求項3】
前記線形静止地表特徴は、
道路のセンターライン、道路の左エッジ、道路の右エッジ、道路の幅を含む特徴のグループから選択された道路区分の線形特徴に対応する
ことを特徴とする請求項1又は2記載の方法。
【請求項4】
線形静止地表特徴を判定するステップは、
前記画像データにおいて路面を検出するステップと、
前記画像データ、前記レンジデータ及び前記関連する位置データを組み合わせることにより前記地理座標系における前記路面の位置を抽出するステップと、
前記路面の前記位置から前記線形静止地表特徴を表す1つ以上のポリラインを算出するステップと
を含むことを特徴とする請求項1から3のいずれか1項に記載の方法。
【請求項5】
前記3Dモデルは、ベクトルに基づく
ことを特徴とする請求項1から4のいずれか1項に記載の方法。
【請求項6】
画像データ及びレンジデータを組み合わせることにより前記3Dモデルに対するオルソ画像を生成するステップと、
前記オルソ画像の各画素に対して前記地理座標系における標高情報を判定するステップと、
3Dオルソ画像を取得するために前記オルソ画像と前記標高情報とをリンクするステップと、
前記3Dオルソ画像を格納し且つ前記測地データベース内の各3Dモデルに前記画像をリンクするステップと
を更に含むことを特徴とする請求項1から5のいずれか1項に記載の方法。
【請求項7】
線形静止地表特徴を表す3Dモデルを含む測地参照データベースであって、前記3Dモデルは、請求項1から6のいずれか1項に記載の方法により生成されたものである測地参照データベース。
【請求項8】
前記3Dモデルを連結することにより構成された連続線形基準ネットワーク
を更に含むことを特徴とする請求項7記載の測地参照データベース。
【請求項9】
各々が3Dモデルにより表現される前記地表の少なくとも一部を表す複数のオルソ画像を更に含み、オルソ画像の各画素は関連する標高情報を含む
ことを特徴とする請求項7又は8記載の測地参照データベース。
【請求項10】
数値標高モデルの三角形分割を向上する方法であって、
前記数値標高モデルを取得するステップと、
請求項7記載の測地参照データベースを取得するステップと、
前記測地参照データベースから僅かに隆起した表面領域の外エッジを記述する3Dモデルを検索するステップと、
前記数値標高モデルにおいて前記3Dモデルがマッチングする場所を見つけるステップと、
前記三角形分割を制御するための切断線として前記僅かに隆起した表面領域の前記外エッジを使用するステップと
を含むことを特徴とする方法。
【請求項11】
数値標高モデルの地理座標を修正する方法であって、
前記数値標高モデルを取得するステップと、
請求項7記載の測地参照データベースを取得するステップと、
前記測地参照データベースから1つ以上の3Dモデルを検索するステップと、
前記3Dモデルが前記数値標高モデルとマッチングする場所を見つけるステップと、
前記数値標高モデルにおける前記見つけられた場所の位置と前記1つ以上のブランチに関連する前記座標との間の位置偏差を判定するステップと、
前記数値標高モデルの前記地理座標を修正するために前記位置偏差を使用するステップと
を含むことを特徴とする方法。
【請求項12】
空中又は衛星画像を補正する方法であって、
空中又は衛星画像を取得するステップと、
請求項8記載の測地参照データベースを取得するステップと、
前記測地参照データベースから1つ以上の3Dモデル及び対応する座標を検索するステップと、
前記画像において前記1つ以上の3Dモデルが前記空中又は衛星画像とマッチングする場所を見つけるステップと、
前記空中又は衛星画像を補正するために前記座標参照系における前記3Dモデルの位置及び対応する見つけられた場所を使用するステップと
を含むことを特徴とする方法。
【請求項13】
プロセッサ(511)と、前記プロセッサに接続され且つ請求項1から6及び10から12のいずれか1項に記載の方法を前記プロセッサ(511)に実行させるように構成されたデータ及び命令を含むコンピュータプログラムを含むメモリ(512、513、514、515)とを備えるコンピュータにより実現されるシステム。
【請求項14】
コンピュータ構成によりロード可能であり且つ請求項1から6及び10から12のいずれか1項に記載の方法を前記コンピュータ構成に実行させる前記データ及び命令を含むコンピュータプログラム。
【請求項15】
コンピュータ構成によりロード可能であり且つ請求項1から6及び10から12のいずれか1項に記載の方法を前記コンピュータ構成に実行させるデータ及び命令を含むコンピュータプログラムを備えるプロセッサ可読媒体。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公表番号】特表2012−511697(P2012−511697A)
【公表日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2011−539485(P2011−539485)
【出願日】平成20年12月9日(2008.12.9)
【国際出願番号】PCT/US2008/013502
【国際公開番号】WO2010/068186
【国際公開日】平成22年6月17日(2010.6.17)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Linux
【出願人】(511137275)トムトム ノース アメリカ インコーポレイテッド (2)
【氏名又は名称原語表記】TomTom North America, Inc.
【住所又は居所原語表記】11 Lafayette Street Lebanon, NH 03766 U.S.A.
【出願人】(511137323)
【氏名又は名称原語表記】TomTom Polska Sp.z.o.o.
【住所又は居所原語表記】Ul Ludna 2 PL 00−406 Warszawa Poland
【公表日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成20年12月9日(2008.12.9)
【国際出願番号】PCT/US2008/013502
【国際公開番号】WO2010/068186
【国際公開日】平成22年6月17日(2010.6.17)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.Linux
【出願人】(511137275)トムトム ノース アメリカ インコーポレイテッド (2)
【氏名又は名称原語表記】TomTom North America, Inc.
【住所又は居所原語表記】11 Lafayette Street Lebanon, NH 03766 U.S.A.
【出願人】(511137323)
【氏名又は名称原語表記】TomTom Polska Sp.z.o.o.
【住所又は居所原語表記】Ul Ludna 2 PL 00−406 Warszawa Poland
[ Back to top ]