
測定値のサブセットを識別する方法および装置、対象物の位置を特定する方法およびシステム、これらの方法のための記録媒体
磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別する方法であって、a)磁界を放射するステップ、およびN個の実際の測定値のセットを求めるために、N組の単軸磁界源/単軸磁気変換器の対を用いてこれらの磁界を測定するステップ(70)と、b)N個の測定値の中のサブセットMiに基づいて、対象物の位置の推定値Piを算出するステップ(72)と、c)推定位置Piと、対象物の位置をN個の測定値から成るセットに関連付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定するステップ(74)と、d)ステップc)中に推定された測定値をステップa)中に求められた実際の測定値と比較することによって、この測定値サブセットMiが擾乱測定値を含むか否かを判定するステップ(76)とを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別するための方法および装置に関する。また本発明は、この識別方法を実施して、基準フレームにおける対象物の位置を特定するための方法およびシステムにも関する。さらに、本発明は、これらの方法を実施するための、情報を記録するための媒体にも関する。
【背景技術】
【0002】
本明細書においては、磁気擾乱素子を、放射されている磁界を、この素子の近傍において変化または変形させるあらゆる物体であると定義する。例えば、磁気擾乱素子は、導電体でもよい。この場合、磁界は、導電体に発生する渦電流によって変更されることになる。導電体は、例えば金属である。また、磁気擾乱素子は、常磁性体、強磁性体、または反磁性体などの磁性体でもよい。強磁性体の場合における磁界の変化は、この磁性体が磁力線を変形させることによるものである。
【0003】
磁気擾乱素子が、磁界源および磁気変換器の近くに存在する場合に、磁気変換器が測定する磁界は、この磁気擾乱素子が存在しない状態で測定する磁界とは異なる。この場合、測定値は、磁気擾乱素子によって「擾乱されている」。
【0004】
本明細書においては、磁気擾乱素子によって擾乱されている測定値を少なくとも1つは含んでいる測定値サブセットを、「擾乱サブセット」と呼ぶ。逆に、磁気擾乱素子によって擾乱されている測定値を少しも含んでいない測定値サブセットを、「正常サブセット」または「非擾乱サブセット」と呼ぶ。
【0005】
磁気擾乱素子によって擾乱されているサブセットを識別する方法は、通常、基準フレームにおける対象物の位置を特定する際に使用されている。
【0006】
基準フレームにおける対象物の位置を特定する公知の方法は、次のステップを有する。
−実際の測定値が、
・磁界を放射するために使用する単軸磁界源の位置、または
・放射された磁界を測定するために使用する単軸磁気変換器の位置、または
・磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値から成るセットを取得するために、N組の単軸磁界源/単軸磁気変換器の対を用いて、磁界を放射するステップおよび放射された磁界を測定するステップと、
−単軸磁界源/単軸磁気変換器の対によって測定された測定値に基づいて、基準フレームにおける対象物の位置を特定するステップ。
【0007】
単軸磁界源は、単一軸に沿って磁界を放射することが好ましい磁界源である。例えば、巻線が同一軸の周りに巻かれているコイルは、単軸磁界源であり、優先放射軸は、巻線の巻軸と一致する。
【0008】
同様に、単軸磁気変換器は、単一の測定軸における磁界強度を測定できる変換器である。
【0009】
磁界に基づいて対象物の位置を特定することには、多くの利点がある。しかし、実際のところ、対象物の周囲には、磁界の測定を邪魔して対象物の位置を誤らせそうな、多くの磁気擾乱素子が存在している。
【0010】
磁気擾乱素子の存在にもかかわらず、対象物の位置を正しく特定するために、測定に冗長性を持たせることが既に提案されている。実際のところ、磁気擾乱範囲の狭さを考慮すると、磁気擾乱素子の存在は、測定値のサブセットだけを擾乱すると想定してもよい。従って、測定値が余分にあると、少なくとも1つの非擾乱測定値サブセットが存在することが多い。測定を冗長にするためには、基準フレームにおける対象物の位置を計算するために必要な最小測定数Nminより多くの、単軸磁界源/単軸磁気変換器の対が必要である。
【0011】
その後の対象物の位置の特定中に、磁気擾乱素子の存在にもかかわらず、対象物の正しい位置を得るために、擾乱測定値より非擾乱測定値により大きい重みを付与することができる。例えば、対象物の位置を、非擾乱測定値サブセットだけに基づいて計算している。
【0012】
しかし、この前に、1つ以上の擾乱測定値サブセットを識別する方法を実施する必要がある。
【0013】
従来、擾乱サブセットの判定は、先行する較正ステップ中に行われている(例えば、特許文献1であるUS2008/0033282参照)。この従来の較正ステップでは、N個の測定値の中のサブセットMiだけが関わる観測器Oiに基づいて、基準フレームにおける対象物の位置の推定値Piを算出している。
【0014】
次いで、推定値Piを、サブセットMiが擾乱測定値を含んでいるか否かを判定するために、対象物の既知の位置と比較している。
【0015】
この方法は、磁気擾乱素子が断続的にだけ存在する場合、または磁気擾乱素子が基準フレーム内を移動する場合に、正しく機能しない。さらに、先行する較正ステップに頼るのは、面倒である。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】米国特許出願公開第2008/0033282号明細書
【特許文献2】米国特許第6528989号明細書
【特許文献3】仏国特許出願公開第0953462号明細書
【非特許文献】
【0017】
【非特許文献1】Tarentola、A.Siam(Ed.)共著、「逆問題理論(Inverse problem theory)」、2005年
【非特許文献2】Aster Elsevier(Ed.)著、「パラメータ推定および逆問題(Parameter estimation and inverse problems)」、Elsevier、2005年
【非特許文献3】S.Lesecq、S.Gentil、N.Daraoui共著、「データ損失のある方形位置推定(Quadrator attitude estimation with data losses)」、European Control Conference, ECC09、ハンガリー、2009年
【非特許文献4】S.Lesecq、S.Gentil、C.Berbra共著、「データ損失のあるフィルタバンクに基づく状態監視(Condition monitoring based on filter bank in the presence of data loss)」、Condition monitoring conference、CM2009/MFPT2009、2009年
【非特許文献5】V.Sircoulond、G.Hoblos、H.Chafouk、J.Ragot共著、「センサ損失の関数としての推定品質の評価(Evaluation of estimation quality as a function of the loss of sensors)」、Diagnostic des systemes complexes、2008年版、p9〜26
【非特許文献6】J.Ragot著、「データの検証および調整、従来のやり方、困難および開発(Validation and reconciliation of data, conventional approach, difficulties and development)」、Les techniques de l’industrie minerale,(2006)29、p22〜30
【発明の概要】
【発明が解決しようとする課題】
【0018】
本発明は、擾乱測定値サブセットを識別する簡単な方法を提供することにより、上記の欠点の少なくとも1つを改善することを目的としている。
【課題を解決するための手段】
【0019】
そのために、本発明の主題は、次のステップを有する方法である。
−推定位置Piと、対象物の位置をN個の測定値から成るセットに結び付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定するステップと、
−推定の測定値を実際の測定値と比較することによって、測定値のサブセットが擾乱測定値を含んでいるか否かを決定するステップ。
【0020】
上記の方法において、サブセットMiが、磁気擾乱素子によって擾乱されている測定値を含んでいる場合、対象物の実際の位置の推定値Piは、間違っていることとなる。必然的に、この間違った位置Piに対応する測定値を推定すると、その推定の測定値は、実際に測定されるものとは非常に異なるものになる。推定の測定値と実際の測定値とのこの差により、サブセットMiが擾乱されているか否かを判定することができる。
【0021】
実施に当たって、上記の方法は、対象物の位置が前もって分かっている必要がある、先行する較正ステップを必要としない。さらに、この方法は、N個の測定値を更新するたびに、繰り返すことができる。従って、この方法は、磁気擾乱素子が断続的にだけ存在する場合、または擾乱の発生が時間とともに変化する場合でさえ、うまく働く。
【0022】
この識別方法の実施形態は、次の特徴の1つ以上を備えているのがよい。
・この方法は、次のステップも有する。
−サブセットMjおよびMiが、少なくとも1つの測定値を共通に有し、かつ他の少なくとも1つの測定値が互いに異なる状況において、N個の測定値の中のサブセットMjだけに関わる観測器Ojに基づいて、基準フレームにおける対象物の同じ位置についての、少なくとも別の推定値Pjを算出するステップと、
−推定位置Pjと、対象物の位置をN個の測定値から成るセットに結び付ける直接モデルとに基づいて、N個の測定値を推定するステップと、
−推定の測定値を実際の測定値と比較することによって、このサブセットMjが擾乱測定値を含んでいるか否かを判定するステップと、
−1つ以上の擾乱測定値をより正確に特定するために、サブセットMiおよびMjの中に擾乱測定値が存在するか否かについての情報を別の方法で確認するステップ。
・またこの方法は、次のステップを有する。
−推定の測定値と実際の測定値との差によって決まる少なくとも1つの残余を計算するステップと、
−この残余が所定の閾値を超える場合に、サブセットが少なくとも1つの擾乱測定値を含んでいるかどうかを判定するステップ。
【0023】
識別方法の上記の実施形態は、さらに次の利点を有する。
−複数の異なるサブセットMiについての情報を別の方法で確認することにより、磁気擾乱素子によって、どの測定値が擾乱されているかを特定することができる。
【0024】
また、本発明の主題は、基準フレームにおける対象物の位置を特定する方法に関し、この方法は、次のステップを備えている。
−擾乱測定値を少しも含まない少なくとも1つの測定値サブセットを見つけるまで、N個の実際の測定値からの複数の測定値サブセットMiに関して、擾乱測定値サブセットを識別するために、上記の方法を繰り返すステップと、
−対象物の位置の特定中に、擾乱測定値を少しも含まない測定値サブセットが見つかった場合、対象物の位置の特定に関して、このサブセットに属する非擾乱測定値に対する、このサブセットに属さない測定値の影響を限定するために、このサブセットに属さない測定値に重みを付けるステップ。
【0025】
この位置を特定する方法の実施形態は、次の特徴の1つ以上を備えているのがよい。
・複数の測定値サブセットが擾乱測定値を少しも含まないと識別される場合、この方法は、擾乱測定値を少しも含まないこれらの測定値サブセットに基づいて求められる、同じ位置の推定値Piの組み合わせに基づいて、対象物の位置を特定するステップを有する。
・対象物の位置の特定中に、擾乱測定値を少しも含まないと識別されているサブセットに基づいて求められる非擾乱推定値によって、擾乱していると識別されている少なくとも1つの測定値を置換するステップを有する。
【0026】
位置特定方法の上記の実施形態は、さらに次の利点を有する。
−対象物の位置の最終推定値を算出するために、複数の非擾乱測定値サブセットに基づいて求められる推定値Piを組み合わせて使用することにより、対象物の位置特定の精度を向上させることができる。
−擾乱測定値を、これらの擾乱測定値の非擾乱推定値で置換することにより、対象物の位置特定の精度を向上させることができる。
【0027】
また、本発明の主題は、電子計算機が命令を実行するとき、上記の方法の1つを実行するための命令を有する情報を記録する媒体に関する。
【0028】
また、本発明の主題は、磁気擾乱素子によって擾乱されている測定値を含むサブセットを識別する識別装置に関する。この識別装置は、次のものを備えている。
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・磁界を測定するために使用する単軸磁気変換器の位置、または
・磁界の周波数により、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値のセットを取得するための、N組の単軸磁界源/単軸磁気変換器の対と、
−N個の測定値の中のサブセットMiだけに基づいて、対象物の位置の推定値Piを算出することができる少なくとも1つの観測器Oiと、
−推定位置Piと、対象物の位置をN個の測定値から成るセットに結び付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定する推定器と、
−推定の測定値を実際の測定値と比較することによって、測定値サブセットが擾乱測定値を含んでいるか否かを判定することができるブロック。
【0029】
最後に、本発明の主題は、基準フレームにおける対象物の位置を特定するシステムでもある。このシステムは、次のものを備えている。
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・磁界を測定するために使用する単軸磁気変換器の位置、または
・磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値から成るセットを取得するための、N組の単軸磁界源/単軸磁気変換器の対と、
−単軸磁界源/単軸磁気変換器の対によって測定された測定値に基づいて、基準フレームにおける対象物の位置を特定するための位置特定モジュールと、
−擾乱測定値を含む測定値サブセットを識別するための識別装置。
【0030】
位置特定モジュールは、次のことができる。
・複数の測定値サブセットMiの中から非擾乱測定値サブセットを少なくとも1つ見つけるために、識別装置の使用と、
・擾乱測定値を少しも含まない測定値サブセットが見つかった場合だけ、対象物の位置に関して、このサブセットに属する非擾乱測定値に対する、このサブセットに属さない測定値の影響を限定するために、このサブセットに属さない測定値への重み付け。
【0031】
本発明は、図面を参照して、限定しない単なる例として挙げる、以下の説明を読むことにより、より良く理解しうると思う。
【図面の簡単な説明】
【0032】
【図1】擾乱測定値サブセットを識別するための装置を備え、基準フレームにおける対象物の位置を特定するシステムの概略図である。
【図2】図1のシステムで使用されている対象物の位置特定モジュールの概略図である。
【図3】図1のシステムにおける対象物の位置を特定する方法のフロー図である。
【発明を実施するための形態】
【0033】
全ての図において、同じ要素には同じ符号を付してある。
【0034】
以下の説明において、当業者に公知の特徴および機能については、詳細には記述しない。
【0035】
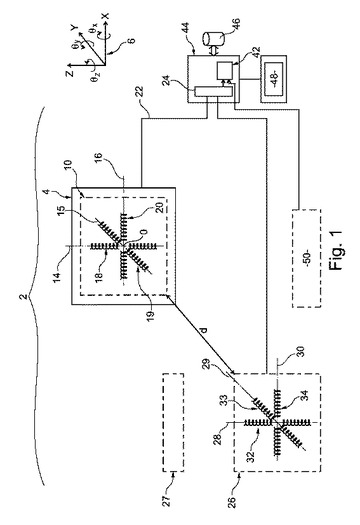
図1は、基準フレーム6における対象物4の位置を特定するシステム2を示している。対象物4は、例えば、人体に導入されている測定用電極またはカテーテルである。対象物4は、基準フレーム6内を6つの自由度で移動できる。
【0036】
基準フレーム6は、3つの直交する軸X、Y、Zを有する固定基準フレームである。
【0037】
基準フレーム6において対象物4の位置を特定するということは、その位置Pを見つけることである。ここで、位置Pは、座標(x,y,z)および座標(θx,θy,θz)で表される。座標x、y、zは、基準フレーム6における対象物4の位置を示している。座標θx、θy、θzは、それぞれ基準フレーム6の軸X、Y、Zに対する対象物4の角方向を示している。
【0038】
基準フレーム6における対象物4の位置を特定するために、対象物4は、3軸磁界源10を備えている。
【0039】
3軸磁界源10は、同一線上にない3つの軸14〜16に沿った磁界を生成できる。ここで、これらの軸14〜16は、相互に直交している。これらの軸は、対象物4に関係している。
【0040】
このために、3軸磁界源10は、ここでは3つの単軸磁界源18〜20から構成されている。単軸磁界源18〜20は、軸14、15、16に沿ってそれぞれ磁界B1j、B2j、B3jを放射する。添え字1、2または3は、単軸磁界源の識別子であり、添え字jは、この単軸磁界源が放射する磁界の周波数fjの識別子である。
【0041】
単軸磁界源18〜20のそれぞれは、点状の磁界源でモデル化することができる。単軸磁界源18〜20は、それぞれの点状の磁界源が基準フレーム6において、全く同じ場所を占有するように配置されているのが好ましい。ここでは、この場所を点Oと呼ぶ。点Oは、軸14〜16の交点である。
【0042】
例えば、各単軸磁界源18〜20は、それぞれ軸14〜16の周りに巻かれた単一のコイルから成っている。ここで、これらのコイルのそれぞれは、巻軸に沿って点Oの両側に対称に分散された2つのほぼ同一の巻線グループに分割されている。各巻線グループは、巻軸に沿って同じ方向に巻かれている。
【0043】
これらの単軸磁界源18〜20のそれぞれは、可撓線のリンク22を介して、処理部24に接続されている。
【0044】
処理部24は、測定の幾何学的冗長性を有するように、2つの3軸磁気センサ26および27にも接続されている。これらの3軸磁気センサ26および27は、距離dだけ離れている。例えば、3軸磁気センサ26および27は、同一であり、3軸磁気センサ26についてだけ、詳細に図示し説明する。
【0045】
3軸磁気センサ26は、基準フレーム6に固定されている。この3軸磁気センサ26は、3つの直交軸28〜30に沿って磁界を測定することができる。ここで、軸28〜30は、それぞれ基準フレーム6の軸Z、Y、Xに平行している。
【0046】
このために、3軸磁気センサ26は、3つの単軸磁気変換器32〜34を組み込んでいる。これらの変換器のそれぞれは、磁界に対するその感度が最大の軸に沿った測定方向を有する。ここで、単軸磁気変換器32、33、34の測定方向は、それぞれ軸28、29、30に一致する。
【0047】
例えば、単軸磁気変換器32、33、34は、それぞれ軸28、29、30の周りに巻かれているコイルである。
【0048】
3軸磁界源10から各3軸磁気センサ26または27までの最短距離dは、3軸磁界源10の最大寸法より少なくとも3倍大きい。3軸磁界源10の最大寸法は、単軸磁界源18〜20の中の最大の単軸磁界源の長さである。これらの条件のもとに、3軸磁界源10は、磁気双極子としてモデル化することができる。
【0049】
同じ動作周波数で動作する1つの単軸磁界源と、1つの単軸磁気変換器とが連携することにより、単軸磁界源/単軸磁気変換器の対を形成する。例えば、単軸磁界源18および単軸磁気変換器32は、周波数f1で動作するとき、第1の単軸磁界源/単軸磁気変換器の対を形成し、周波数f2で動作するとき、第2の単軸磁界源/単軸磁気変換器の対を形成する。単軸磁界源19と連携するこの同じ単軸磁気変換器32は、周波数f1およびf2で動作するとき、それぞれ第3および第4の単軸磁界源/単軸磁気変換器の対を形成する。
【0050】
単軸磁界源/単軸磁気変換器の対のそれぞれは、他の対とは異なる周波数で動作することができる。しかし、ここでは、単なる例として、各単軸磁界源は、周波数f1だけで動作すると想定する。従って、18の単軸磁界源/単軸磁気変換器の対が存在することになる。単軸磁界源/単軸磁気変換器の対のそれぞれは、それぞれの対に固有の物理量の測定値maiに対応する。測定値maiは、単軸磁気変換器の測定軸上に、単軸磁界源によって放射される磁界の大きさである。各対の測定値maiは、磁気擾乱素子がこれらの測定値の1つを擾乱するが、他の測定値を擾乱しないことがあるという意味において、別の対の測定値majから独立している。
【0051】
従って、この実施形態においては、18の独立の測定値ma1〜ma18が存在し、これらの測定値は、同時にまたは順次に、測定されてもよい。これら18の測定値ma1〜ma18は、同時に測定され、一定の間隔で繰り返されることが好ましい。一定の間隔は、測定間隔に相当する。測定間隔ごとに、18の測定値は、18の単軸磁界源/単軸磁気変換器の対によって更新される。例えば、測定間隔は、単軸磁気変換器の信号のサンプリング周期に等しい。
【0052】
これら18の測定値ma1〜ma18のセットをMで表し、セットMの測定値の数をNで表す。ここでは、Nが18である特定の場合について説明する。
【0053】
処理部24は、磁界Bi1を生成するように、3軸磁界源10にAC電流を供給し、3軸磁気センサ26および27の単軸磁気変換器32〜34が測定した磁界を取得する。
【0054】
例えば、処理部24は、同期検出器である。このような同期検出器の一例は、特許文献2(US6,528,989)において、その中の図16に関して説明されている。従って、処理部24については、ここでは詳細に説明しない。
【0055】
処理部24は、擾乱測定値サブセットを識別しており、基準フレーム6における対象物4の位置を特定する位置特定モジュール42に接続されている。
【0056】
例えば、処理部24が、電子カードの形態を取っているのに対して、位置特定モジュール42は、ソフトウェアモジュールの形態を取っている。このため、システム2は、プログラム可能電子計算機44を備えており、この電子計算機44は、処理部24を組み込んでおり、情報記録媒体に記録されている命令を実行できる。このため、電子計算機44は、電子計算機44が命令を実行するとき、図3の方法を実行するための命令を有するメモリ46に、接続されている。電子計算機44は、マンマシンインタフェース48にも接続されている。例えば、マンマシンインタフェースは、基準フレーム6における対象物4の位置を示すスクリーンを備えている。
【0057】
また、システム2は、基準フレーム6における対象物4の位置を示す、磁界以外の物理量を測定するための他の装置も備えていてもよい。例えば、システム2は、放射線写真装置またはカメラなどの装置50を備えている。装置50の測定値は、磁気擾乱素子が存在するか、または不在であるかの影響を受けない。
【0058】
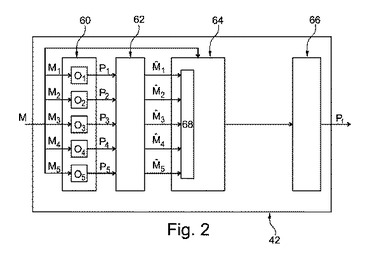
図2は、位置特定モジュール42の例示的実施形態を詳細に示している。
【0059】
位置特定モジュール42は、次のものを連続して備えている。
・観測器Oiのバンク60と、
・測定値を推定する推定器62と、
・擾乱測定値サブセットMiを判定するためのブロック64と、
・基準フレーム6における対象物4の位置を特定する位置特定器66。
【0060】
測定間隔ごとに、位置特定モジュール42は、入力として、セットMのN個の測定値を受け取る。このセットMは、観測器のバンク60に入力として伝達される。
【0061】
各観測器Oiは、基準フレーム6における対象物4の位置の推定値Piを求めるために、連立方程式を解くことができる。各観測器Oiは、このために、測定値ma1〜ma18の中からサブセットMiだけを使用する。サブセットMiは、セットMの中から選択されるR個の測定値を含んでいる。ここで、Rは、厳格に、N未満で、かつ閾値Nmin以上の整数である。閾値Nminは、基準フレーム6において対象物4の位置を推定するために必要な測定値の最小数である。ここで、対象物4の位置が6つの座標x、y、z、θx、θy、θzで決定されることを考慮すると、閾値Nminの値は8である。
【0062】
観測器Oiの連立方程式は、例えば、磁気擾乱素子の存在を考慮せずに、サブセットMiのR個の測定値の測定を行うために使用する、単軸磁界源と単軸磁気変換器との磁気相互作用をモデル化することによって求められる。この連立方程式においては、対象物4の座標x、y、z、θx、θy、θzが未知数である。
【0063】
観測器の構成についての情報は、非特許文献1および2を参照することができる。
【0064】
ここで、この連立方程式は、カルマンフィルタの形態で表現されるのが好ましい。
【0065】
観測器Oiは、これらの観測器の1つが、非擾乱測定値サブセットMiだけを使用する確率を最大にするように選択されるようになっている。
【0066】
例えば、この実施形態において、5つの観測器O1〜O5は、観測器のバンク60に組み込まれている。
【0067】
観測器O1は、3軸磁気センサ26の測定値だけを使用する。従って、サブセットM1は、9つの測定値maiだけを含んでいる。この測定値サブセットM1は、磁気擾乱素子が3軸磁気センサ27の測定値だけに影響を及ぼす場合に、擾乱されない。
【0068】
観測器O2は、3軸磁気センサ27が測定した測定値だけを使用する。従って、測定値サブセットM2は、9つの測定値maiだけを含んでいる。このサブセットM2は、磁気擾乱素子が3軸磁気センサ26の測定値だけに影響を及ぼす場合、擾乱されない。
【0069】
観測器O3、O4、O5は、それぞれ次の単軸磁気変換器が測定した測定値だけを使用している。
・3軸磁気センサ26および27の単軸磁気変換器33および34と、
・3軸磁気センサ26および27の単軸磁気変換器32および34と、
・3軸磁気センサ26および27の単軸磁気変換器32および33。
【0070】
従って、サブセットM3、M4、M5は、それぞれ12の測定値maiを含んでいる。これらのサブセットM3、M4、M5は、それぞれ単軸磁気変換器32、33、34が測定した測定値だけに、磁気擾乱素子が影響を及ぼす場合に、擾乱測定値を少しも含まない。換言すると、磁気擾乱素子が方向X、YまたはZの1つの方向に平行な磁界だけに影響を及ぼす場合に、サブセットM3、M4、M5の中の少なくとも2つは正常である。
【0071】
推定器62は、推定位置Piに置かれている対象物に関して、システム2の単軸磁界源/単軸磁気変換器の対のそれぞれが測定する実際の測定値のN個の推定値
【数1】

〜
【数2】
を含むセット
【数3】
を算出する。表記
【数4】
において、jは、測定値の識別子であり、iは、推定値Piを得るために使用されている測定値サブセットMiの識別子である。ここで、添え字jは、1〜18の間にある。
【0072】
通常、推定器62は、対象物4の位置Pの6つの座標をN個の推定値
【数1】
〜
【数2】
に結び付ける連立方程式を解く。この連立方程式は、例えば磁気擾乱素子が存在する可能性などを考慮せずに、例えば、システム2の各単軸磁界源と各単軸磁気変換器との間の磁気相互作用をモデル化することによって得られる。この連立方程式は、直接的な問題、すなわち対象物4の所与の位置に対応する測定値の値を決定する問題を、解くことができる直接モデルである。
【0073】
ブロック64は、測定値サブセットMiが擾乱されているか否かを判定する。このために、ブロック64は、推定値
【数4】
を実際の測定値majと比較することができる比較器68を備えている。
【0074】
ここで、推定の測定値
【数4】
と本当の測定値majとの比較は、各観測器Oiに関する残余RjiのセットRiと、各観測器Oiに関する判定用値Ciとを使用して行われる。
【0075】
残余Rjiは、例えば、推定の測定値
【数4】
と対応する本当の測定値majとの差に等しい。
【0076】
ここで、判定用値Ciは、平均M_diと平均M_uiとの差に等しい。
【0077】
平均M_diは、観測器Oiが使用しなかった測定値に関して求められる残余Rjiの平均である。使用しなかった測定値は、サブセットMiに属しない測定値である。
【0078】
平均M_uiは、観測器Oiによって使用された測定値に関して求められる残余Rjiの平均である。使用された測定値は、サブセットMiに属する測定値である。
【0079】
位置特定器66は、対象物4の位置の最終推定値Pfを出力する。この推定値は、擾乱サブセットより非擾乱サブセットMiに大きな重みを付与することによって求められる。
【0080】
位置特定モジュール42の種々の要素およびそれら要素の動作について、図3を参照してより詳細に説明する。
【0081】
3軸磁界源10と、3軸磁気センサ26および27と、処理部24と、観測器のバンク60と、推定器62と、ブロック64とが連携することにより、磁気擾乱素子によって擾乱されたサブセットを識別する装置を形成している。
【0082】
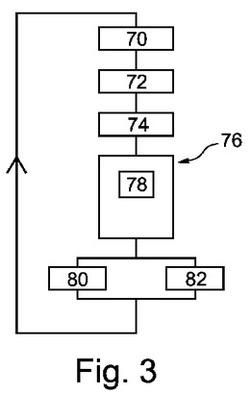
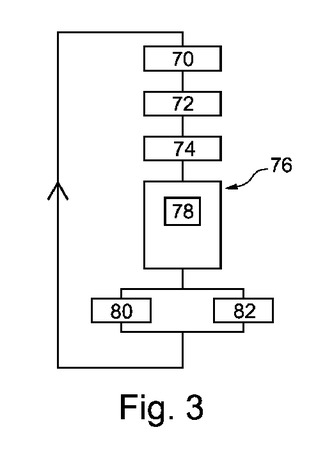
次に、システム2の動作について、図3を参照して説明する。
【0083】
最初に、測定間隔ごとのステップ70中に、システム2の単軸磁界源/単軸磁気変換器の対のそれぞれが、N個の測定値majの測定を行う。
【0084】
次のステップ72中に、これらの測定値は、入力として観測器のバンク60に伝達される。これらの測定値に基づいて、ステップ72中に、各観測器Oiは、対応する測定値サブセットMiに基づいて、対象物4の位置の推定値Piを算出する。こうして、ステップ72の完了時に、観測器のバンク60は、5つの推定値Piを算出している。
【0085】
ステップ74中に、推定値Piに基づいて、セット
【数3】
を構成する。このため、N個の実際の測定値の推定値
【数1】
〜
【数2】
から成る対応するセット
【数3】
を求めるために、各推定値Piが推定器62に入力される。
【0086】
ステップ74の完了時には、5つのセット
【数3】
が求められている。
【0087】
次のステップ76中に、ブロック64は、サブセットMiが擾乱されているか否かを判定する。このため、動作78中に、各サブセット
【数3】
に関して、比較器68は、各推定の測定値
【数4】
を、同じ測定間隔中に測定された対応する実際の測定値majと比較する。
【0088】
より正確には、比較器68は、各サブセット
【数3】
に関して、残余Rjiを計算する。その後、比較器68は、平均M_diおよび平均M_uiを計算する。最後に、判定用値Ciを計算する。
【0089】
使用しなかった測定値だけが擾乱されている場合、平均M_diは、大きい値を取るのに対して、平均M_uiは逆に低い値を取る。その結果、平均M_diと平均M_uiとの差は、大きくなる。従って、この場合の判定用値Ciの値は大きい。従って、判定用値Ciの大きい値は、擾乱測定値が存在するが、擾乱測定値は、サブセットMiには含まれていないことを示している。
【0090】
使用されなかった測定値、および使用された測定値の両方ともが擾乱されている場合、または擾乱された測定値がない場合、平均M_diと平均M_uiとの差は、前の例よりも小さくなる。この場合、判定用値Ciは小さい。
【0091】
従って、動作78中に、判定用値Ciは、所定の閾値S1と比較される。判定用値Ciの値がこの閾値S1を超える場合、サブセットMiは、正常なサブセットであると識別される。
【0092】
逆に、判定用値Ciが閾値S1より小さい場合、測定値の全てが擾乱されている場合と、測定値のどれも擾乱されていない場合とを区別するために、さらに比較を行う。例えば、この追加の比較は、平均M_diを所定の閾値S2と比較することから成っている。平均M_diがこの閾値S2より小さい場合、どの測定値も擾乱されていないことを示している。従って、サブセットMiおよび他のサブセットのセットは、正常である。逆の場合は、全てのサブセットMiが擾乱されていることを示している。
【0093】
次のステップ80中に、磁気擾乱素子が引き起こしている擾乱について、より正確に特徴を求める。そのため、ステップ76中に取得した種々のサブセットMiについての情報を、どの測定値が擾乱されているかをより正確に特定するために、さらに確認を進める。
【0094】
例えば、サブセットMiが正常であるのに対して、サブセットM2が擾乱されている場合、磁気擾乱素子は、3軸磁気センサ27の近くにあることを示している。さらに、測定値サブセットM3が擾乱されていない場合、3軸磁気センサ27の単軸磁気変換器32だけが、この磁気擾乱素子によって擾乱されていることを示している。
【0095】
別の例においては、サブセットM3は正常である。この場合は、磁気擾乱素子がZ軸に沿った測定値だけを擾乱していることを示している。さらに、サブセットM1もM2も擾乱されている場合は、3軸磁気センサ26および27の単軸磁気変換器32だけが、磁気擾乱素子の影響を受けている変換器であることを示している。
【0096】
ステップ80と並行してステップ82中に、位置特定器66は、対象物4の位置特定の精度に対する擾乱測定値の影響を限定するために、擾乱測定値に重みを付けることによって対象物4の位置の最終推定値Pfを確定している。
【0097】
このステップ中に、種々の推定方式を使用できる。例えば、磁気擾乱素子が存在しないと判定されている場合は、N個の測定値から成るセットMのセットを、推定値Pfに結び付ける観測器Otを使用する。
【0098】
磁気擾乱素子と、少なくとも1つの非擾乱測定値サブセットとが存在すると判定されている場合、判定用値Ciが最大であるサブセットMiを選択する。その後のステップ72中に、推定値Pfは、観測器Oiによって算出された推定値Piに等しくなるように選択されてもよい。
【0099】
別の解決手段は、擾乱測定値を補償するものである。それに応じて、N個の測定値を最終推定値Pfに結び付ける全部がそろった観測器Otが使用される。この全部がそろったモデルにおいて、未知数は、測定値majである。正常なサブセットMiの測定値majは、全部そろった観測器Otによって直接使用される。他方、サブセットMiに属さない擾乱測定値または潜在的な擾乱測定値は、それらの値の非擾乱値の推定値で置換される。この推定値は、ステップ74中に、正常なサブセットMiの測定値に基づいて求められる推定値
【数4】
である。その後、観測器Otは、実際の測定値と推定の測定値とのこの組み合わせを使用して、推定値Pfを求める。
【0100】
正常な測定値サブセットが複数存在する場合に最終推定値Pfを求めるために、これらの正常なサブセットに基づいて求められている対象物4の位置の推定値Piを、組み合わせることもできる。例えば、ここで測定値サブセットMkおよびMlが正常であると想定する。この場合、最終推定値Pfは、次の関係を用いて求めることができる。Pf=αRk+(1−α)Pl、ここでαは、重み係数である。通常、重み係数αは、次の式で与えられる。α=ek/(ek+el)、ここで、ekおよびelは、対象物4の本当の位置と、対象物4の位置のそれぞれの推定値PkおよびPlとの誤差を表している。
【0101】
例えば、誤差ekおよびelは、推定の測定値
【数4】
と実際の測定値majとの差に基づいて計算される。例えば、非常に簡略化した場合において、誤差ekおよびelは、それぞれ平均M_ukおよび平均M_ulに等しくとされる。
【0102】
測定間隔ごとに、ステップ70〜82を繰り返す。従って、間欠的な磁気擾乱素子の存在を識別することができ、その存在を考慮に入れるために、推定値Pfの計算をリアルタイムに適応させることができる。
【0103】
多数の他の実施形態も可能である。例えば、観測器Oiは、他のやり方で構成されてもよい。観測器Oiは、対象物4の位置の6つの座標をセットNの18の測定値に結び付ける単一のモデルに基づいて求めてもよい。このモデルでは、各観測器Oiの連立方程式は、サブセットMiの構成要素でない測定値を無視することにより求められる。例えば、これらの測定値を無視する1つのやり方は、サブセットMiに属さない測定値の不確実性が、サブセットMiに属する測定値の不確実性よりはるかに大きいことを活用する。観測器Oiを構成するためのこのような方式についての情報については、さらに非特許文献3および4に記載されている。
【0104】
残余および他の判定用値を計算する他の方式も使用することができる。例えば、他の方式は、非特許文献5および6に記載されている。
【0105】
変形形態として、直接モデルの連立方程式は、例えば位置などが分かっている、1つ以上の磁気擾乱素子の存在を考慮に入れている。
【0106】
図3の方法の前に、特許文献3(FR0,953,462)に記載されているような、擾乱測定値を検出するステップが来てもよい。
【0107】
上述のことは、1次元または2次元の基準フレームにおいて対象物4の位置を特定するシステムにも適用できるものである。さらに、システム2は、対象物4の場所または角方向の測定を望まない場合、あるいは対象物4の自由度が少ない場合、簡略化することができる。これらの場合においては、単軸磁界源/単軸磁気変換器の対の数を減少してもよい。さらに、観測器および推定器は、それに応じて簡易化される。
【0108】
3軸磁気センサおよび3軸磁界源の数は、変更されてもよい。例えば、別の実施形態におけるシステム2は、1つの3軸磁気センサおよび1つの3軸磁界源だけを備えている。3軸磁気センサおよび3軸磁界源は、それぞれ8つの測定値から成るサブセットMiの、9つのサブセットMiに対応する。また、3軸磁気センサまたは単軸磁界源の数を増加することもできる。例えば、特定の実施形態におけるシステム2は、3つの3軸磁気センサおよび1つの3軸磁界源を備え、それによって、27の測定値サブセットMiを取得することができる。
【0109】
また、単軸磁界源/単軸磁気変換器の対の数を増加して、複数の異なる周波数でこれらの対の1つ以上を動作させることもできる。例えば、各対は、2つの周波数f1およびf2で動作する。
【0110】
磁界は、連続的に、パルス的に、または周期的に放射されてもよい。
【0111】
磁気擾乱素子の位置の特定および検出について、固定の基準フレーム6に対して対象物4が移動するという特定の場合について述べている。しかし、上述のことは、固定しているのが対象物4で、移動するのが基準フレーム6という逆の状況にも適用することができる。この場合、対象物4が固定され、対象物4に対して単軸磁気変換器が移動する。
【0112】
また、磁界源と磁気センサの位置を逆にすることもできる。例えば、1つ以上の3軸磁気センサが対象物4に組み込まれ、1つ以上の3軸磁界源が、基準フレーム6に何らの自由度もなく固定される。
【0113】
磁気擾乱素子を検出すると、擾乱測定値を、装置50によって得られた測定値で置換するか、または装置50によって得られた測定値を考慮することができる。
【0114】
位置を特定する対象物の方向は、オイラー角または四元数などの他の方式で定めてもよい。
【0115】
これまで述べたことは、医療部門だけに適用が限定されるものではなく、磁気擾乱素子を検出するか、または磁界を用いて対象物の位置を特定する必要がある、あらゆる部門に適用することができるものである。
【符号の説明】
【0116】
2 システム
4 対象物
6 基準フレーム
10 3軸磁界源
14、15、16、28、29、30 軸
18、19、20 単軸磁界源
22 リンク
24 処理部
26、27 3軸磁気センサ
32、33、34 単軸磁気変換器
42 位置特定モジュール
44 電子計算機
46 メモリ
48 マンマシンインタフェース
50 装置
60 バンク
62 推定器
64 ブロック
66 位置特定器
68 比較器
70〜76、80、82 ステップ
78 動作
d 距離
M (測定値の)セット
M1〜M5 (測定値)サブセット
(推定値の)セット、サブセット
O 点O
P1〜P5 推定値
Pf 最終推定値
【技術分野】
【0001】
本発明は、磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別するための方法および装置に関する。また本発明は、この識別方法を実施して、基準フレームにおける対象物の位置を特定するための方法およびシステムにも関する。さらに、本発明は、これらの方法を実施するための、情報を記録するための媒体にも関する。
【背景技術】
【0002】
本明細書においては、磁気擾乱素子を、放射されている磁界を、この素子の近傍において変化または変形させるあらゆる物体であると定義する。例えば、磁気擾乱素子は、導電体でもよい。この場合、磁界は、導電体に発生する渦電流によって変更されることになる。導電体は、例えば金属である。また、磁気擾乱素子は、常磁性体、強磁性体、または反磁性体などの磁性体でもよい。強磁性体の場合における磁界の変化は、この磁性体が磁力線を変形させることによるものである。
【0003】
磁気擾乱素子が、磁界源および磁気変換器の近くに存在する場合に、磁気変換器が測定する磁界は、この磁気擾乱素子が存在しない状態で測定する磁界とは異なる。この場合、測定値は、磁気擾乱素子によって「擾乱されている」。
【0004】
本明細書においては、磁気擾乱素子によって擾乱されている測定値を少なくとも1つは含んでいる測定値サブセットを、「擾乱サブセット」と呼ぶ。逆に、磁気擾乱素子によって擾乱されている測定値を少しも含んでいない測定値サブセットを、「正常サブセット」または「非擾乱サブセット」と呼ぶ。
【0005】
磁気擾乱素子によって擾乱されているサブセットを識別する方法は、通常、基準フレームにおける対象物の位置を特定する際に使用されている。
【0006】
基準フレームにおける対象物の位置を特定する公知の方法は、次のステップを有する。
−実際の測定値が、
・磁界を放射するために使用する単軸磁界源の位置、または
・放射された磁界を測定するために使用する単軸磁気変換器の位置、または
・磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値から成るセットを取得するために、N組の単軸磁界源/単軸磁気変換器の対を用いて、磁界を放射するステップおよび放射された磁界を測定するステップと、
−単軸磁界源/単軸磁気変換器の対によって測定された測定値に基づいて、基準フレームにおける対象物の位置を特定するステップ。
【0007】
単軸磁界源は、単一軸に沿って磁界を放射することが好ましい磁界源である。例えば、巻線が同一軸の周りに巻かれているコイルは、単軸磁界源であり、優先放射軸は、巻線の巻軸と一致する。
【0008】
同様に、単軸磁気変換器は、単一の測定軸における磁界強度を測定できる変換器である。
【0009】
磁界に基づいて対象物の位置を特定することには、多くの利点がある。しかし、実際のところ、対象物の周囲には、磁界の測定を邪魔して対象物の位置を誤らせそうな、多くの磁気擾乱素子が存在している。
【0010】
磁気擾乱素子の存在にもかかわらず、対象物の位置を正しく特定するために、測定に冗長性を持たせることが既に提案されている。実際のところ、磁気擾乱範囲の狭さを考慮すると、磁気擾乱素子の存在は、測定値のサブセットだけを擾乱すると想定してもよい。従って、測定値が余分にあると、少なくとも1つの非擾乱測定値サブセットが存在することが多い。測定を冗長にするためには、基準フレームにおける対象物の位置を計算するために必要な最小測定数Nminより多くの、単軸磁界源/単軸磁気変換器の対が必要である。
【0011】
その後の対象物の位置の特定中に、磁気擾乱素子の存在にもかかわらず、対象物の正しい位置を得るために、擾乱測定値より非擾乱測定値により大きい重みを付与することができる。例えば、対象物の位置を、非擾乱測定値サブセットだけに基づいて計算している。
【0012】
しかし、この前に、1つ以上の擾乱測定値サブセットを識別する方法を実施する必要がある。
【0013】
従来、擾乱サブセットの判定は、先行する較正ステップ中に行われている(例えば、特許文献1であるUS2008/0033282参照)。この従来の較正ステップでは、N個の測定値の中のサブセットMiだけが関わる観測器Oiに基づいて、基準フレームにおける対象物の位置の推定値Piを算出している。
【0014】
次いで、推定値Piを、サブセットMiが擾乱測定値を含んでいるか否かを判定するために、対象物の既知の位置と比較している。
【0015】
この方法は、磁気擾乱素子が断続的にだけ存在する場合、または磁気擾乱素子が基準フレーム内を移動する場合に、正しく機能しない。さらに、先行する較正ステップに頼るのは、面倒である。
【先行技術文献】
【特許文献】
【0016】
【特許文献1】米国特許出願公開第2008/0033282号明細書
【特許文献2】米国特許第6528989号明細書
【特許文献3】仏国特許出願公開第0953462号明細書
【非特許文献】
【0017】
【非特許文献1】Tarentola、A.Siam(Ed.)共著、「逆問題理論(Inverse problem theory)」、2005年
【非特許文献2】Aster Elsevier(Ed.)著、「パラメータ推定および逆問題(Parameter estimation and inverse problems)」、Elsevier、2005年
【非特許文献3】S.Lesecq、S.Gentil、N.Daraoui共著、「データ損失のある方形位置推定(Quadrator attitude estimation with data losses)」、European Control Conference, ECC09、ハンガリー、2009年
【非特許文献4】S.Lesecq、S.Gentil、C.Berbra共著、「データ損失のあるフィルタバンクに基づく状態監視(Condition monitoring based on filter bank in the presence of data loss)」、Condition monitoring conference、CM2009/MFPT2009、2009年
【非特許文献5】V.Sircoulond、G.Hoblos、H.Chafouk、J.Ragot共著、「センサ損失の関数としての推定品質の評価(Evaluation of estimation quality as a function of the loss of sensors)」、Diagnostic des systemes complexes、2008年版、p9〜26
【非特許文献6】J.Ragot著、「データの検証および調整、従来のやり方、困難および開発(Validation and reconciliation of data, conventional approach, difficulties and development)」、Les techniques de l’industrie minerale,(2006)29、p22〜30
【発明の概要】
【発明が解決しようとする課題】
【0018】
本発明は、擾乱測定値サブセットを識別する簡単な方法を提供することにより、上記の欠点の少なくとも1つを改善することを目的としている。
【課題を解決するための手段】
【0019】
そのために、本発明の主題は、次のステップを有する方法である。
−推定位置Piと、対象物の位置をN個の測定値から成るセットに結び付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定するステップと、
−推定の測定値を実際の測定値と比較することによって、測定値のサブセットが擾乱測定値を含んでいるか否かを決定するステップ。
【0020】
上記の方法において、サブセットMiが、磁気擾乱素子によって擾乱されている測定値を含んでいる場合、対象物の実際の位置の推定値Piは、間違っていることとなる。必然的に、この間違った位置Piに対応する測定値を推定すると、その推定の測定値は、実際に測定されるものとは非常に異なるものになる。推定の測定値と実際の測定値とのこの差により、サブセットMiが擾乱されているか否かを判定することができる。
【0021】
実施に当たって、上記の方法は、対象物の位置が前もって分かっている必要がある、先行する較正ステップを必要としない。さらに、この方法は、N個の測定値を更新するたびに、繰り返すことができる。従って、この方法は、磁気擾乱素子が断続的にだけ存在する場合、または擾乱の発生が時間とともに変化する場合でさえ、うまく働く。
【0022】
この識別方法の実施形態は、次の特徴の1つ以上を備えているのがよい。
・この方法は、次のステップも有する。
−サブセットMjおよびMiが、少なくとも1つの測定値を共通に有し、かつ他の少なくとも1つの測定値が互いに異なる状況において、N個の測定値の中のサブセットMjだけに関わる観測器Ojに基づいて、基準フレームにおける対象物の同じ位置についての、少なくとも別の推定値Pjを算出するステップと、
−推定位置Pjと、対象物の位置をN個の測定値から成るセットに結び付ける直接モデルとに基づいて、N個の測定値を推定するステップと、
−推定の測定値を実際の測定値と比較することによって、このサブセットMjが擾乱測定値を含んでいるか否かを判定するステップと、
−1つ以上の擾乱測定値をより正確に特定するために、サブセットMiおよびMjの中に擾乱測定値が存在するか否かについての情報を別の方法で確認するステップ。
・またこの方法は、次のステップを有する。
−推定の測定値と実際の測定値との差によって決まる少なくとも1つの残余を計算するステップと、
−この残余が所定の閾値を超える場合に、サブセットが少なくとも1つの擾乱測定値を含んでいるかどうかを判定するステップ。
【0023】
識別方法の上記の実施形態は、さらに次の利点を有する。
−複数の異なるサブセットMiについての情報を別の方法で確認することにより、磁気擾乱素子によって、どの測定値が擾乱されているかを特定することができる。
【0024】
また、本発明の主題は、基準フレームにおける対象物の位置を特定する方法に関し、この方法は、次のステップを備えている。
−擾乱測定値を少しも含まない少なくとも1つの測定値サブセットを見つけるまで、N個の実際の測定値からの複数の測定値サブセットMiに関して、擾乱測定値サブセットを識別するために、上記の方法を繰り返すステップと、
−対象物の位置の特定中に、擾乱測定値を少しも含まない測定値サブセットが見つかった場合、対象物の位置の特定に関して、このサブセットに属する非擾乱測定値に対する、このサブセットに属さない測定値の影響を限定するために、このサブセットに属さない測定値に重みを付けるステップ。
【0025】
この位置を特定する方法の実施形態は、次の特徴の1つ以上を備えているのがよい。
・複数の測定値サブセットが擾乱測定値を少しも含まないと識別される場合、この方法は、擾乱測定値を少しも含まないこれらの測定値サブセットに基づいて求められる、同じ位置の推定値Piの組み合わせに基づいて、対象物の位置を特定するステップを有する。
・対象物の位置の特定中に、擾乱測定値を少しも含まないと識別されているサブセットに基づいて求められる非擾乱推定値によって、擾乱していると識別されている少なくとも1つの測定値を置換するステップを有する。
【0026】
位置特定方法の上記の実施形態は、さらに次の利点を有する。
−対象物の位置の最終推定値を算出するために、複数の非擾乱測定値サブセットに基づいて求められる推定値Piを組み合わせて使用することにより、対象物の位置特定の精度を向上させることができる。
−擾乱測定値を、これらの擾乱測定値の非擾乱推定値で置換することにより、対象物の位置特定の精度を向上させることができる。
【0027】
また、本発明の主題は、電子計算機が命令を実行するとき、上記の方法の1つを実行するための命令を有する情報を記録する媒体に関する。
【0028】
また、本発明の主題は、磁気擾乱素子によって擾乱されている測定値を含むサブセットを識別する識別装置に関する。この識別装置は、次のものを備えている。
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・磁界を測定するために使用する単軸磁気変換器の位置、または
・磁界の周波数により、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値のセットを取得するための、N組の単軸磁界源/単軸磁気変換器の対と、
−N個の測定値の中のサブセットMiだけに基づいて、対象物の位置の推定値Piを算出することができる少なくとも1つの観測器Oiと、
−推定位置Piと、対象物の位置をN個の測定値から成るセットに結び付ける少なくとも1つの直接モデルとに基づいて、N個の測定値を推定する推定器と、
−推定の測定値を実際の測定値と比較することによって、測定値サブセットが擾乱測定値を含んでいるか否かを判定することができるブロック。
【0029】
最後に、本発明の主題は、基準フレームにおける対象物の位置を特定するシステムでもある。このシステムは、次のものを備えている。
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・磁界を測定するために使用する単軸磁気変換器の位置、または
・磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値から成るセットを取得するための、N組の単軸磁界源/単軸磁気変換器の対と、
−単軸磁界源/単軸磁気変換器の対によって測定された測定値に基づいて、基準フレームにおける対象物の位置を特定するための位置特定モジュールと、
−擾乱測定値を含む測定値サブセットを識別するための識別装置。
【0030】
位置特定モジュールは、次のことができる。
・複数の測定値サブセットMiの中から非擾乱測定値サブセットを少なくとも1つ見つけるために、識別装置の使用と、
・擾乱測定値を少しも含まない測定値サブセットが見つかった場合だけ、対象物の位置に関して、このサブセットに属する非擾乱測定値に対する、このサブセットに属さない測定値の影響を限定するために、このサブセットに属さない測定値への重み付け。
【0031】
本発明は、図面を参照して、限定しない単なる例として挙げる、以下の説明を読むことにより、より良く理解しうると思う。
【図面の簡単な説明】
【0032】
【図1】擾乱測定値サブセットを識別するための装置を備え、基準フレームにおける対象物の位置を特定するシステムの概略図である。
【図2】図1のシステムで使用されている対象物の位置特定モジュールの概略図である。
【図3】図1のシステムにおける対象物の位置を特定する方法のフロー図である。
【発明を実施するための形態】
【0033】
全ての図において、同じ要素には同じ符号を付してある。
【0034】
以下の説明において、当業者に公知の特徴および機能については、詳細には記述しない。
【0035】
図1は、基準フレーム6における対象物4の位置を特定するシステム2を示している。対象物4は、例えば、人体に導入されている測定用電極またはカテーテルである。対象物4は、基準フレーム6内を6つの自由度で移動できる。
【0036】
基準フレーム6は、3つの直交する軸X、Y、Zを有する固定基準フレームである。
【0037】
基準フレーム6において対象物4の位置を特定するということは、その位置Pを見つけることである。ここで、位置Pは、座標(x,y,z)および座標(θx,θy,θz)で表される。座標x、y、zは、基準フレーム6における対象物4の位置を示している。座標θx、θy、θzは、それぞれ基準フレーム6の軸X、Y、Zに対する対象物4の角方向を示している。
【0038】
基準フレーム6における対象物4の位置を特定するために、対象物4は、3軸磁界源10を備えている。
【0039】
3軸磁界源10は、同一線上にない3つの軸14〜16に沿った磁界を生成できる。ここで、これらの軸14〜16は、相互に直交している。これらの軸は、対象物4に関係している。
【0040】
このために、3軸磁界源10は、ここでは3つの単軸磁界源18〜20から構成されている。単軸磁界源18〜20は、軸14、15、16に沿ってそれぞれ磁界B1j、B2j、B3jを放射する。添え字1、2または3は、単軸磁界源の識別子であり、添え字jは、この単軸磁界源が放射する磁界の周波数fjの識別子である。
【0041】
単軸磁界源18〜20のそれぞれは、点状の磁界源でモデル化することができる。単軸磁界源18〜20は、それぞれの点状の磁界源が基準フレーム6において、全く同じ場所を占有するように配置されているのが好ましい。ここでは、この場所を点Oと呼ぶ。点Oは、軸14〜16の交点である。
【0042】
例えば、各単軸磁界源18〜20は、それぞれ軸14〜16の周りに巻かれた単一のコイルから成っている。ここで、これらのコイルのそれぞれは、巻軸に沿って点Oの両側に対称に分散された2つのほぼ同一の巻線グループに分割されている。各巻線グループは、巻軸に沿って同じ方向に巻かれている。
【0043】
これらの単軸磁界源18〜20のそれぞれは、可撓線のリンク22を介して、処理部24に接続されている。
【0044】
処理部24は、測定の幾何学的冗長性を有するように、2つの3軸磁気センサ26および27にも接続されている。これらの3軸磁気センサ26および27は、距離dだけ離れている。例えば、3軸磁気センサ26および27は、同一であり、3軸磁気センサ26についてだけ、詳細に図示し説明する。
【0045】
3軸磁気センサ26は、基準フレーム6に固定されている。この3軸磁気センサ26は、3つの直交軸28〜30に沿って磁界を測定することができる。ここで、軸28〜30は、それぞれ基準フレーム6の軸Z、Y、Xに平行している。
【0046】
このために、3軸磁気センサ26は、3つの単軸磁気変換器32〜34を組み込んでいる。これらの変換器のそれぞれは、磁界に対するその感度が最大の軸に沿った測定方向を有する。ここで、単軸磁気変換器32、33、34の測定方向は、それぞれ軸28、29、30に一致する。
【0047】
例えば、単軸磁気変換器32、33、34は、それぞれ軸28、29、30の周りに巻かれているコイルである。
【0048】
3軸磁界源10から各3軸磁気センサ26または27までの最短距離dは、3軸磁界源10の最大寸法より少なくとも3倍大きい。3軸磁界源10の最大寸法は、単軸磁界源18〜20の中の最大の単軸磁界源の長さである。これらの条件のもとに、3軸磁界源10は、磁気双極子としてモデル化することができる。
【0049】
同じ動作周波数で動作する1つの単軸磁界源と、1つの単軸磁気変換器とが連携することにより、単軸磁界源/単軸磁気変換器の対を形成する。例えば、単軸磁界源18および単軸磁気変換器32は、周波数f1で動作するとき、第1の単軸磁界源/単軸磁気変換器の対を形成し、周波数f2で動作するとき、第2の単軸磁界源/単軸磁気変換器の対を形成する。単軸磁界源19と連携するこの同じ単軸磁気変換器32は、周波数f1およびf2で動作するとき、それぞれ第3および第4の単軸磁界源/単軸磁気変換器の対を形成する。
【0050】
単軸磁界源/単軸磁気変換器の対のそれぞれは、他の対とは異なる周波数で動作することができる。しかし、ここでは、単なる例として、各単軸磁界源は、周波数f1だけで動作すると想定する。従って、18の単軸磁界源/単軸磁気変換器の対が存在することになる。単軸磁界源/単軸磁気変換器の対のそれぞれは、それぞれの対に固有の物理量の測定値maiに対応する。測定値maiは、単軸磁気変換器の測定軸上に、単軸磁界源によって放射される磁界の大きさである。各対の測定値maiは、磁気擾乱素子がこれらの測定値の1つを擾乱するが、他の測定値を擾乱しないことがあるという意味において、別の対の測定値majから独立している。
【0051】
従って、この実施形態においては、18の独立の測定値ma1〜ma18が存在し、これらの測定値は、同時にまたは順次に、測定されてもよい。これら18の測定値ma1〜ma18は、同時に測定され、一定の間隔で繰り返されることが好ましい。一定の間隔は、測定間隔に相当する。測定間隔ごとに、18の測定値は、18の単軸磁界源/単軸磁気変換器の対によって更新される。例えば、測定間隔は、単軸磁気変換器の信号のサンプリング周期に等しい。
【0052】
これら18の測定値ma1〜ma18のセットをMで表し、セットMの測定値の数をNで表す。ここでは、Nが18である特定の場合について説明する。
【0053】
処理部24は、磁界Bi1を生成するように、3軸磁界源10にAC電流を供給し、3軸磁気センサ26および27の単軸磁気変換器32〜34が測定した磁界を取得する。
【0054】
例えば、処理部24は、同期検出器である。このような同期検出器の一例は、特許文献2(US6,528,989)において、その中の図16に関して説明されている。従って、処理部24については、ここでは詳細に説明しない。
【0055】
処理部24は、擾乱測定値サブセットを識別しており、基準フレーム6における対象物4の位置を特定する位置特定モジュール42に接続されている。
【0056】
例えば、処理部24が、電子カードの形態を取っているのに対して、位置特定モジュール42は、ソフトウェアモジュールの形態を取っている。このため、システム2は、プログラム可能電子計算機44を備えており、この電子計算機44は、処理部24を組み込んでおり、情報記録媒体に記録されている命令を実行できる。このため、電子計算機44は、電子計算機44が命令を実行するとき、図3の方法を実行するための命令を有するメモリ46に、接続されている。電子計算機44は、マンマシンインタフェース48にも接続されている。例えば、マンマシンインタフェースは、基準フレーム6における対象物4の位置を示すスクリーンを備えている。
【0057】
また、システム2は、基準フレーム6における対象物4の位置を示す、磁界以外の物理量を測定するための他の装置も備えていてもよい。例えば、システム2は、放射線写真装置またはカメラなどの装置50を備えている。装置50の測定値は、磁気擾乱素子が存在するか、または不在であるかの影響を受けない。
【0058】
図2は、位置特定モジュール42の例示的実施形態を詳細に示している。
【0059】
位置特定モジュール42は、次のものを連続して備えている。
・観測器Oiのバンク60と、
・測定値を推定する推定器62と、
・擾乱測定値サブセットMiを判定するためのブロック64と、
・基準フレーム6における対象物4の位置を特定する位置特定器66。
【0060】
測定間隔ごとに、位置特定モジュール42は、入力として、セットMのN個の測定値を受け取る。このセットMは、観測器のバンク60に入力として伝達される。
【0061】
各観測器Oiは、基準フレーム6における対象物4の位置の推定値Piを求めるために、連立方程式を解くことができる。各観測器Oiは、このために、測定値ma1〜ma18の中からサブセットMiだけを使用する。サブセットMiは、セットMの中から選択されるR個の測定値を含んでいる。ここで、Rは、厳格に、N未満で、かつ閾値Nmin以上の整数である。閾値Nminは、基準フレーム6において対象物4の位置を推定するために必要な測定値の最小数である。ここで、対象物4の位置が6つの座標x、y、z、θx、θy、θzで決定されることを考慮すると、閾値Nminの値は8である。
【0062】
観測器Oiの連立方程式は、例えば、磁気擾乱素子の存在を考慮せずに、サブセットMiのR個の測定値の測定を行うために使用する、単軸磁界源と単軸磁気変換器との磁気相互作用をモデル化することによって求められる。この連立方程式においては、対象物4の座標x、y、z、θx、θy、θzが未知数である。
【0063】
観測器の構成についての情報は、非特許文献1および2を参照することができる。
【0064】
ここで、この連立方程式は、カルマンフィルタの形態で表現されるのが好ましい。
【0065】
観測器Oiは、これらの観測器の1つが、非擾乱測定値サブセットMiだけを使用する確率を最大にするように選択されるようになっている。
【0066】
例えば、この実施形態において、5つの観測器O1〜O5は、観測器のバンク60に組み込まれている。
【0067】
観測器O1は、3軸磁気センサ26の測定値だけを使用する。従って、サブセットM1は、9つの測定値maiだけを含んでいる。この測定値サブセットM1は、磁気擾乱素子が3軸磁気センサ27の測定値だけに影響を及ぼす場合に、擾乱されない。
【0068】
観測器O2は、3軸磁気センサ27が測定した測定値だけを使用する。従って、測定値サブセットM2は、9つの測定値maiだけを含んでいる。このサブセットM2は、磁気擾乱素子が3軸磁気センサ26の測定値だけに影響を及ぼす場合、擾乱されない。
【0069】
観測器O3、O4、O5は、それぞれ次の単軸磁気変換器が測定した測定値だけを使用している。
・3軸磁気センサ26および27の単軸磁気変換器33および34と、
・3軸磁気センサ26および27の単軸磁気変換器32および34と、
・3軸磁気センサ26および27の単軸磁気変換器32および33。
【0070】
従って、サブセットM3、M4、M5は、それぞれ12の測定値maiを含んでいる。これらのサブセットM3、M4、M5は、それぞれ単軸磁気変換器32、33、34が測定した測定値だけに、磁気擾乱素子が影響を及ぼす場合に、擾乱測定値を少しも含まない。換言すると、磁気擾乱素子が方向X、YまたはZの1つの方向に平行な磁界だけに影響を及ぼす場合に、サブセットM3、M4、M5の中の少なくとも2つは正常である。
【0071】
推定器62は、推定位置Piに置かれている対象物に関して、システム2の単軸磁界源/単軸磁気変換器の対のそれぞれが測定する実際の測定値のN個の推定値
【数1】
〜
【数2】
を含むセット
【数3】
を算出する。表記
【数4】
において、jは、測定値の識別子であり、iは、推定値Piを得るために使用されている測定値サブセットMiの識別子である。ここで、添え字jは、1〜18の間にある。
【0072】
通常、推定器62は、対象物4の位置Pの6つの座標をN個の推定値
【数1】
〜
【数2】
に結び付ける連立方程式を解く。この連立方程式は、例えば磁気擾乱素子が存在する可能性などを考慮せずに、例えば、システム2の各単軸磁界源と各単軸磁気変換器との間の磁気相互作用をモデル化することによって得られる。この連立方程式は、直接的な問題、すなわち対象物4の所与の位置に対応する測定値の値を決定する問題を、解くことができる直接モデルである。
【0073】
ブロック64は、測定値サブセットMiが擾乱されているか否かを判定する。このために、ブロック64は、推定値
【数4】
を実際の測定値majと比較することができる比較器68を備えている。
【0074】
ここで、推定の測定値
【数4】
と本当の測定値majとの比較は、各観測器Oiに関する残余RjiのセットRiと、各観測器Oiに関する判定用値Ciとを使用して行われる。
【0075】
残余Rjiは、例えば、推定の測定値
【数4】
と対応する本当の測定値majとの差に等しい。
【0076】
ここで、判定用値Ciは、平均M_diと平均M_uiとの差に等しい。
【0077】
平均M_diは、観測器Oiが使用しなかった測定値に関して求められる残余Rjiの平均である。使用しなかった測定値は、サブセットMiに属しない測定値である。
【0078】
平均M_uiは、観測器Oiによって使用された測定値に関して求められる残余Rjiの平均である。使用された測定値は、サブセットMiに属する測定値である。
【0079】
位置特定器66は、対象物4の位置の最終推定値Pfを出力する。この推定値は、擾乱サブセットより非擾乱サブセットMiに大きな重みを付与することによって求められる。
【0080】
位置特定モジュール42の種々の要素およびそれら要素の動作について、図3を参照してより詳細に説明する。
【0081】
3軸磁界源10と、3軸磁気センサ26および27と、処理部24と、観測器のバンク60と、推定器62と、ブロック64とが連携することにより、磁気擾乱素子によって擾乱されたサブセットを識別する装置を形成している。
【0082】
次に、システム2の動作について、図3を参照して説明する。
【0083】
最初に、測定間隔ごとのステップ70中に、システム2の単軸磁界源/単軸磁気変換器の対のそれぞれが、N個の測定値majの測定を行う。
【0084】
次のステップ72中に、これらの測定値は、入力として観測器のバンク60に伝達される。これらの測定値に基づいて、ステップ72中に、各観測器Oiは、対応する測定値サブセットMiに基づいて、対象物4の位置の推定値Piを算出する。こうして、ステップ72の完了時に、観測器のバンク60は、5つの推定値Piを算出している。
【0085】
ステップ74中に、推定値Piに基づいて、セット
【数3】
を構成する。このため、N個の実際の測定値の推定値
【数1】
〜
【数2】
から成る対応するセット
【数3】
を求めるために、各推定値Piが推定器62に入力される。
【0086】
ステップ74の完了時には、5つのセット
【数3】
が求められている。
【0087】
次のステップ76中に、ブロック64は、サブセットMiが擾乱されているか否かを判定する。このため、動作78中に、各サブセット
【数3】
に関して、比較器68は、各推定の測定値
【数4】
を、同じ測定間隔中に測定された対応する実際の測定値majと比較する。
【0088】
より正確には、比較器68は、各サブセット
【数3】
に関して、残余Rjiを計算する。その後、比較器68は、平均M_diおよび平均M_uiを計算する。最後に、判定用値Ciを計算する。
【0089】
使用しなかった測定値だけが擾乱されている場合、平均M_diは、大きい値を取るのに対して、平均M_uiは逆に低い値を取る。その結果、平均M_diと平均M_uiとの差は、大きくなる。従って、この場合の判定用値Ciの値は大きい。従って、判定用値Ciの大きい値は、擾乱測定値が存在するが、擾乱測定値は、サブセットMiには含まれていないことを示している。
【0090】
使用されなかった測定値、および使用された測定値の両方ともが擾乱されている場合、または擾乱された測定値がない場合、平均M_diと平均M_uiとの差は、前の例よりも小さくなる。この場合、判定用値Ciは小さい。
【0091】
従って、動作78中に、判定用値Ciは、所定の閾値S1と比較される。判定用値Ciの値がこの閾値S1を超える場合、サブセットMiは、正常なサブセットであると識別される。
【0092】
逆に、判定用値Ciが閾値S1より小さい場合、測定値の全てが擾乱されている場合と、測定値のどれも擾乱されていない場合とを区別するために、さらに比較を行う。例えば、この追加の比較は、平均M_diを所定の閾値S2と比較することから成っている。平均M_diがこの閾値S2より小さい場合、どの測定値も擾乱されていないことを示している。従って、サブセットMiおよび他のサブセットのセットは、正常である。逆の場合は、全てのサブセットMiが擾乱されていることを示している。
【0093】
次のステップ80中に、磁気擾乱素子が引き起こしている擾乱について、より正確に特徴を求める。そのため、ステップ76中に取得した種々のサブセットMiについての情報を、どの測定値が擾乱されているかをより正確に特定するために、さらに確認を進める。
【0094】
例えば、サブセットMiが正常であるのに対して、サブセットM2が擾乱されている場合、磁気擾乱素子は、3軸磁気センサ27の近くにあることを示している。さらに、測定値サブセットM3が擾乱されていない場合、3軸磁気センサ27の単軸磁気変換器32だけが、この磁気擾乱素子によって擾乱されていることを示している。
【0095】
別の例においては、サブセットM3は正常である。この場合は、磁気擾乱素子がZ軸に沿った測定値だけを擾乱していることを示している。さらに、サブセットM1もM2も擾乱されている場合は、3軸磁気センサ26および27の単軸磁気変換器32だけが、磁気擾乱素子の影響を受けている変換器であることを示している。
【0096】
ステップ80と並行してステップ82中に、位置特定器66は、対象物4の位置特定の精度に対する擾乱測定値の影響を限定するために、擾乱測定値に重みを付けることによって対象物4の位置の最終推定値Pfを確定している。
【0097】
このステップ中に、種々の推定方式を使用できる。例えば、磁気擾乱素子が存在しないと判定されている場合は、N個の測定値から成るセットMのセットを、推定値Pfに結び付ける観測器Otを使用する。
【0098】
磁気擾乱素子と、少なくとも1つの非擾乱測定値サブセットとが存在すると判定されている場合、判定用値Ciが最大であるサブセットMiを選択する。その後のステップ72中に、推定値Pfは、観測器Oiによって算出された推定値Piに等しくなるように選択されてもよい。
【0099】
別の解決手段は、擾乱測定値を補償するものである。それに応じて、N個の測定値を最終推定値Pfに結び付ける全部がそろった観測器Otが使用される。この全部がそろったモデルにおいて、未知数は、測定値majである。正常なサブセットMiの測定値majは、全部そろった観測器Otによって直接使用される。他方、サブセットMiに属さない擾乱測定値または潜在的な擾乱測定値は、それらの値の非擾乱値の推定値で置換される。この推定値は、ステップ74中に、正常なサブセットMiの測定値に基づいて求められる推定値
【数4】
である。その後、観測器Otは、実際の測定値と推定の測定値とのこの組み合わせを使用して、推定値Pfを求める。
【0100】
正常な測定値サブセットが複数存在する場合に最終推定値Pfを求めるために、これらの正常なサブセットに基づいて求められている対象物4の位置の推定値Piを、組み合わせることもできる。例えば、ここで測定値サブセットMkおよびMlが正常であると想定する。この場合、最終推定値Pfは、次の関係を用いて求めることができる。Pf=αRk+(1−α)Pl、ここでαは、重み係数である。通常、重み係数αは、次の式で与えられる。α=ek/(ek+el)、ここで、ekおよびelは、対象物4の本当の位置と、対象物4の位置のそれぞれの推定値PkおよびPlとの誤差を表している。
【0101】
例えば、誤差ekおよびelは、推定の測定値
【数4】
と実際の測定値majとの差に基づいて計算される。例えば、非常に簡略化した場合において、誤差ekおよびelは、それぞれ平均M_ukおよび平均M_ulに等しくとされる。
【0102】
測定間隔ごとに、ステップ70〜82を繰り返す。従って、間欠的な磁気擾乱素子の存在を識別することができ、その存在を考慮に入れるために、推定値Pfの計算をリアルタイムに適応させることができる。
【0103】
多数の他の実施形態も可能である。例えば、観測器Oiは、他のやり方で構成されてもよい。観測器Oiは、対象物4の位置の6つの座標をセットNの18の測定値に結び付ける単一のモデルに基づいて求めてもよい。このモデルでは、各観測器Oiの連立方程式は、サブセットMiの構成要素でない測定値を無視することにより求められる。例えば、これらの測定値を無視する1つのやり方は、サブセットMiに属さない測定値の不確実性が、サブセットMiに属する測定値の不確実性よりはるかに大きいことを活用する。観測器Oiを構成するためのこのような方式についての情報については、さらに非特許文献3および4に記載されている。
【0104】
残余および他の判定用値を計算する他の方式も使用することができる。例えば、他の方式は、非特許文献5および6に記載されている。
【0105】
変形形態として、直接モデルの連立方程式は、例えば位置などが分かっている、1つ以上の磁気擾乱素子の存在を考慮に入れている。
【0106】
図3の方法の前に、特許文献3(FR0,953,462)に記載されているような、擾乱測定値を検出するステップが来てもよい。
【0107】
上述のことは、1次元または2次元の基準フレームにおいて対象物4の位置を特定するシステムにも適用できるものである。さらに、システム2は、対象物4の場所または角方向の測定を望まない場合、あるいは対象物4の自由度が少ない場合、簡略化することができる。これらの場合においては、単軸磁界源/単軸磁気変換器の対の数を減少してもよい。さらに、観測器および推定器は、それに応じて簡易化される。
【0108】
3軸磁気センサおよび3軸磁界源の数は、変更されてもよい。例えば、別の実施形態におけるシステム2は、1つの3軸磁気センサおよび1つの3軸磁界源だけを備えている。3軸磁気センサおよび3軸磁界源は、それぞれ8つの測定値から成るサブセットMiの、9つのサブセットMiに対応する。また、3軸磁気センサまたは単軸磁界源の数を増加することもできる。例えば、特定の実施形態におけるシステム2は、3つの3軸磁気センサおよび1つの3軸磁界源を備え、それによって、27の測定値サブセットMiを取得することができる。
【0109】
また、単軸磁界源/単軸磁気変換器の対の数を増加して、複数の異なる周波数でこれらの対の1つ以上を動作させることもできる。例えば、各対は、2つの周波数f1およびf2で動作する。
【0110】
磁界は、連続的に、パルス的に、または周期的に放射されてもよい。
【0111】
磁気擾乱素子の位置の特定および検出について、固定の基準フレーム6に対して対象物4が移動するという特定の場合について述べている。しかし、上述のことは、固定しているのが対象物4で、移動するのが基準フレーム6という逆の状況にも適用することができる。この場合、対象物4が固定され、対象物4に対して単軸磁気変換器が移動する。
【0112】
また、磁界源と磁気センサの位置を逆にすることもできる。例えば、1つ以上の3軸磁気センサが対象物4に組み込まれ、1つ以上の3軸磁界源が、基準フレーム6に何らの自由度もなく固定される。
【0113】
磁気擾乱素子を検出すると、擾乱測定値を、装置50によって得られた測定値で置換するか、または装置50によって得られた測定値を考慮することができる。
【0114】
位置を特定する対象物の方向は、オイラー角または四元数などの他の方式で定めてもよい。
【0115】
これまで述べたことは、医療部門だけに適用が限定されるものではなく、磁気擾乱素子を検出するか、または磁界を用いて対象物の位置を特定する必要がある、あらゆる部門に適用することができるものである。
【符号の説明】
【0116】
2 システム
4 対象物
6 基準フレーム
10 3軸磁界源
14、15、16、28、29、30 軸
18、19、20 単軸磁界源
22 リンク
24 処理部
26、27 3軸磁気センサ
32、33、34 単軸磁気変換器
42 位置特定モジュール
44 電子計算機
46 メモリ
48 マンマシンインタフェース
50 装置
60 バンク
62 推定器
64 ブロック
66 位置特定器
68 比較器
70〜76、80、82 ステップ
78 動作
d 距離
M (測定値の)セット
M1〜M5 (測定値)サブセット
(推定値の)セット、サブセット
O 点O
P1〜P5 推定値
Pf 最終推定値
【特許請求の範囲】
【請求項1】
磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別する方法であって、
a)セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・前記磁界を測定するために使用する単軸磁気変換器の位置、または
・前記磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値から成る前記セットを求めるために、前記単軸磁界源および前記単軸磁気変換器の一方は、移動対象物に関係し、他方は、前記対象物の位置が表される基準フレームに関係している、N組の単軸磁界源/単軸磁気変換器の対を用いて、磁界を放射するステップおよび前記磁界を測定するステップ(70)と、
b)前記N個の測定値の中のサブセットMiだけに関わる観測器Oiに基づいて、前記基準フレームにおける前記対象物の位置の推定値Piを計算するステップ(72)とを有し、さらに
c)前記推定位置Piと、前記対象物の位置をN個の測定値から成る前記セットと結び付ける少なくとも1つの直接モデルとに基づいて、前記N個の測定値を推定するステップ(74)と、
d)ステップc)中に求めた前記推定の測定値を、ステップa)中に求めた前記実際の測定値と比較することによって、前記測定値サブセットMiが擾乱測定値を含むか否かを判定するステップ(76)も有することを特徴とする方法。
【請求項2】
前記方法は、
−前記N個の測定値の中のサブセットMjだけが関わる測定器Ojに基づいて、前記基準フレームにおける、前記対象物の同じ位置についての、少なくとも別の推定値Pjを算出するステップ(72)と、
−前記推定位置Pjと、前記対象物の位置をN個の測定値から成る前記セットに結び付ける前記直接モデルとに基づいて、前記N個の測定値を推定するステップ(74)と、
−前記推定の測定値を前記実際の測定値と比較することによって、このサブセットMjが擾乱測定値を含むか否かを判定するステップ(76)と、
−前記1つ以上擾乱測定値をより正確に特定するために、前記サブセットMiおよびMjの中に擾乱測定値が存在するか、または不在かについての情報を別の方法で確認するステップ(80)も有することを特徴とする請求項1に記載の方法。
【請求項3】
ステップd)は、
−前記推定の測定値と前記実際の測定値との差に応じて、少なくとも1つの残余を計算するステップと、
−前記残余が所定の閾値を超える場合に、前記サブセットが、少なくとも1つの擾乱測定値を含んでいるかどうかを判定するステップとを有することを特徴とする請求項1または2に記載の方法。
【請求項4】
基準フレームにおける対象物の位置を特定する方法であって、
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・前記放射された磁界を測定するために使用する単軸磁気変換器の位置、または
・前記磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値の前記セットを求めるために、N組の単軸磁界源/単軸磁気変換器の対を用いて、磁界を放射するステップおよび前記磁界を測定するステップ(70)と、
−単軸磁界源/単軸磁気変換器の前記対によって測定された前記測定値に基づいて、前記基準フレームにおける前記対象物の位置を特定するステップ(82)とを有し、さらに
−擾乱測定値を少しも含まない少なくとも1つの測定値サブセットを見つけるまで、前記N個の実際の測定値の中の複数の測定値サブセットMiに関して、請求項1〜3のいずれか1項に従って、擾乱測定値を含む測定値サブセットを識別する方法を繰り返すステップと、
−前記対象物の前記位置の特定(82)中に、擾乱測定値を少しも含まない測定値サブセットが見つかった場合だけ、前記対象物の位置に関して、このサブセットに属する前記非擾乱測定値に対する擾乱測定値の影響を限定するために、このサブセットに属さない測定値に重みを付けるステップも有することを特徴とする方法。
【請求項5】
複数の測定値サブセットが擾乱測定値を少しも含まないと識別される場合、前記方法は、擾乱測定値を少しも含まない前記複数の測定値サブセットに基づいて求められる、同じ位置についての推定値Piの組み合わせに基づいて、前記対象物の位置を特定するステップ(82)を有することを特徴とする請求項4に記載の方法。
【請求項6】
前記対象物の前記位置の特定(82)中に、前記方法は、擾乱されていると識別された少なくとも1つの測定値を、擾乱測定値を少しも含まないと識別されているサブセットに基づいて求められるその非擾乱値の推定値によって置換するステップを有することを特徴とする請求項4または5に記載の方法。
【請求項7】
電子計算機が命令を実行するとき、請求項1〜6のいずれか1項に記載の方法を実行するための前記命令を備えていることを特徴とする情報を記録するための媒体(46)。
【請求項8】
磁気擾乱素子によって擾乱されている測定値を含むサブセットを識別するための識別装置であって、
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・前記磁界を測定するために使用する単軸磁気変換器の位置、または
・前記磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値の前記セットを求めるための、N組の単軸磁界源/単軸磁気変換器の対(18〜20、32〜34)と、
−前記N個の測定値の中のサブセットMiだけに基づいて、前記対象物の位置の推定値Piを算出することができる少なくとも1つの観測器Oiとを備え、さらに
−前記推定位置Piと、前記対象物の位置をN個の測定値から成る前記セットに結び付ける少なくとも1つの直接モデルとに基づく、前記N個の測定値の推定器(62)と、
−前記推定の測定値を前記実際の測定値と比較することによって、前記測定値サブセットが擾乱測定値を含むか否かを判定することができるブロック(64)も備えていることを特徴とする識別装置。
【請求項9】
基準フレームにおける対象物の位置を特定するシステムであって、
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・前記磁界を測定するために使用する単軸磁気変換器の位置、または前記磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値から成る前記セットを求めるための、N組の単軸磁界源/単軸磁気変換器の対(18〜20、32〜34)と、
−前記単軸磁界源/単軸磁気変換器の対によって測定される前記測定値に基づいて、前記基準フレームにおける前記対象物の位置を特定する位置特定モジュール(42)とを備え、さらに
−請求項8に記載の、擾乱測定値を含む測定値サブセットを識別するための識別装置を備え、
−前記位置特定モジュール(42)は、
・複数の測定値サブセットMiの中から非擾乱測定値サブセットを少なくとも1つ見つけるために前記識別装置を使用でき、かつ
・擾乱測定値を少しも含まない測定値サブセットが見つかった場合だけ、前記対象物の前記位置に関して、このサブセットに属する非擾乱測定値に対する、このサブセットに属さない測定値の影響を限定するために、このサブセットに属さない測定値に重みを付けることができることを特徴とするシステム。
【請求項1】
磁気擾乱素子によって擾乱されている測定値を含む測定値サブセットを識別する方法であって、
a)セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・前記磁界を測定するために使用する単軸磁気変換器の位置、または
・前記磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値から成る前記セットを求めるために、前記単軸磁界源および前記単軸磁気変換器の一方は、移動対象物に関係し、他方は、前記対象物の位置が表される基準フレームに関係している、N組の単軸磁界源/単軸磁気変換器の対を用いて、磁界を放射するステップおよび前記磁界を測定するステップ(70)と、
b)前記N個の測定値の中のサブセットMiだけに関わる観測器Oiに基づいて、前記基準フレームにおける前記対象物の位置の推定値Piを計算するステップ(72)とを有し、さらに
c)前記推定位置Piと、前記対象物の位置をN個の測定値から成る前記セットと結び付ける少なくとも1つの直接モデルとに基づいて、前記N個の測定値を推定するステップ(74)と、
d)ステップc)中に求めた前記推定の測定値を、ステップa)中に求めた前記実際の測定値と比較することによって、前記測定値サブセットMiが擾乱測定値を含むか否かを判定するステップ(76)も有することを特徴とする方法。
【請求項2】
前記方法は、
−前記N個の測定値の中のサブセットMjだけが関わる測定器Ojに基づいて、前記基準フレームにおける、前記対象物の同じ位置についての、少なくとも別の推定値Pjを算出するステップ(72)と、
−前記推定位置Pjと、前記対象物の位置をN個の測定値から成る前記セットに結び付ける前記直接モデルとに基づいて、前記N個の測定値を推定するステップ(74)と、
−前記推定の測定値を前記実際の測定値と比較することによって、このサブセットMjが擾乱測定値を含むか否かを判定するステップ(76)と、
−前記1つ以上擾乱測定値をより正確に特定するために、前記サブセットMiおよびMjの中に擾乱測定値が存在するか、または不在かについての情報を別の方法で確認するステップ(80)も有することを特徴とする請求項1に記載の方法。
【請求項3】
ステップd)は、
−前記推定の測定値と前記実際の測定値との差に応じて、少なくとも1つの残余を計算するステップと、
−前記残余が所定の閾値を超える場合に、前記サブセットが、少なくとも1つの擾乱測定値を含んでいるかどうかを判定するステップとを有することを特徴とする請求項1または2に記載の方法。
【請求項4】
基準フレームにおける対象物の位置を特定する方法であって、
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・前記放射された磁界を測定するために使用する単軸磁気変換器の位置、または
・前記磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値の前記セットを求めるために、N組の単軸磁界源/単軸磁気変換器の対を用いて、磁界を放射するステップおよび前記磁界を測定するステップ(70)と、
−単軸磁界源/単軸磁気変換器の前記対によって測定された前記測定値に基づいて、前記基準フレームにおける前記対象物の位置を特定するステップ(82)とを有し、さらに
−擾乱測定値を少しも含まない少なくとも1つの測定値サブセットを見つけるまで、前記N個の実際の測定値の中の複数の測定値サブセットMiに関して、請求項1〜3のいずれか1項に従って、擾乱測定値を含む測定値サブセットを識別する方法を繰り返すステップと、
−前記対象物の前記位置の特定(82)中に、擾乱測定値を少しも含まない測定値サブセットが見つかった場合だけ、前記対象物の位置に関して、このサブセットに属する前記非擾乱測定値に対する擾乱測定値の影響を限定するために、このサブセットに属さない測定値に重みを付けるステップも有することを特徴とする方法。
【請求項5】
複数の測定値サブセットが擾乱測定値を少しも含まないと識別される場合、前記方法は、擾乱測定値を少しも含まない前記複数の測定値サブセットに基づいて求められる、同じ位置についての推定値Piの組み合わせに基づいて、前記対象物の位置を特定するステップ(82)を有することを特徴とする請求項4に記載の方法。
【請求項6】
前記対象物の前記位置の特定(82)中に、前記方法は、擾乱されていると識別された少なくとも1つの測定値を、擾乱測定値を少しも含まないと識別されているサブセットに基づいて求められるその非擾乱値の推定値によって置換するステップを有することを特徴とする請求項4または5に記載の方法。
【請求項7】
電子計算機が命令を実行するとき、請求項1〜6のいずれか1項に記載の方法を実行するための前記命令を備えていることを特徴とする情報を記録するための媒体(46)。
【請求項8】
磁気擾乱素子によって擾乱されている測定値を含むサブセットを識別するための識別装置であって、
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・前記磁界を測定するために使用する単軸磁気変換器の位置、または
・前記磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値の前記セットを求めるための、N組の単軸磁界源/単軸磁気変換器の対(18〜20、32〜34)と、
−前記N個の測定値の中のサブセットMiだけに基づいて、前記対象物の位置の推定値Piを算出することができる少なくとも1つの観測器Oiとを備え、さらに
−前記推定位置Piと、前記対象物の位置をN個の測定値から成る前記セットに結び付ける少なくとも1つの直接モデルとに基づく、前記N個の測定値の推定器(62)と、
−前記推定の測定値を前記実際の測定値と比較することによって、前記測定値サブセットが擾乱測定値を含むか否かを判定することができるブロック(64)も備えていることを特徴とする識別装置。
【請求項9】
基準フレームにおける対象物の位置を特定するシステムであって、
−セットの実際の測定値のそれぞれが、
・磁界を放射するために使用する単軸磁界源の位置、または
・前記磁界を測定するために使用する単軸磁気変換器の位置、または前記磁界の周波数によって、他から区別される単軸磁界源/単軸磁気変換器の対を用いて求められる、N個の実際の測定値から成る前記セットを求めるための、N組の単軸磁界源/単軸磁気変換器の対(18〜20、32〜34)と、
−前記単軸磁界源/単軸磁気変換器の対によって測定される前記測定値に基づいて、前記基準フレームにおける前記対象物の位置を特定する位置特定モジュール(42)とを備え、さらに
−請求項8に記載の、擾乱測定値を含む測定値サブセットを識別するための識別装置を備え、
−前記位置特定モジュール(42)は、
・複数の測定値サブセットMiの中から非擾乱測定値サブセットを少なくとも1つ見つけるために前記識別装置を使用でき、かつ
・擾乱測定値を少しも含まない測定値サブセットが見つかった場合だけ、前記対象物の前記位置に関して、このサブセットに属する非擾乱測定値に対する、このサブセットに属さない測定値の影響を限定するために、このサブセットに属さない測定値に重みを付けることができることを特徴とするシステム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2013−515253(P2013−515253A)
【公表日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願番号】特願2012−545283(P2012−545283)
【出願日】平成22年12月20日(2010.12.20)
【国際出願番号】PCT/EP2010/070317
【国際公開番号】WO2011/076767
【国際公開日】平成23年6月30日(2011.6.30)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
【公表日】平成25年5月2日(2013.5.2)
【国際特許分類】
【出願日】平成22年12月20日(2010.12.20)
【国際出願番号】PCT/EP2010/070317
【国際公開番号】WO2011/076767
【国際公開日】平成23年6月30日(2011.6.30)
【出願人】(510132347)コミサリア ア レネルジ アトミク エ オウ エネルジ アルタナティヴ (51)
【Fターム(参考)】
[ Back to top ]