
測定及び記憶された重力傾度を用いて慣性航法測定値の精度を改善する方法及びシステム
【課題】 重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するシステムを提供する。
【解決手段】 一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。その方法の一実施形態は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
【解決手段】 一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。その方法の一実施形態は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は概括的には慣性航法に関し、詳細には、重力データベースを用いて、非連続的な原子干渉計の慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理することに関する。
関連出願の相互参照
本願は、米国仮特許出願第60/485,050号(James R. Huddleによって、2003年7月3日に出願された、タイトル「A METHOD FOR THE PROCESSING OF NON-CONTINUOUS ATOM INTERFEROMETER INERTIAL INSTRUMENT MEASUREMENTS AND CONTINUOUS WIDE BANDWIDTH INSTRUMENT MEASUREMENTS WITH A GRAVITY DATABASE」)の優先権を主張するものである。
【背景技術】
【0002】
ジャイロスコープ及び加速度計だけを利用する従来技術の受動型航法システムは、そのようなシステムが長期にわたって動作するために一般的に必要とされる、連続した速度、位置及び姿勢精度を提供するものではない。これらの慣性センサがドリフト及び重力の影響によって位置、速度及び姿勢に誤差が生じるため、長期にわたって動作するための航法システムでは、それらのセンサしか使用しないことは許容できないものであった。これらの従来技術の慣性航法システムが長期にわたって動作するには、位置を周期的に更新する必要があった。これらの更新は一般的には、グローバル・ポジショニング・システム(GPS)、レーダ航法システム或いはソナーシステムからの位置決定によって実施された。
【0003】
ジャイロスコープ及び加速度計のような慣性計測器において大幅な改善がなされてきた。ドリフトは問題にならないレベルまで低減されており、誤差の主な発生源として重力の影響だけが残されている。慣性センサの性能を補正するために重量測定マップを利用することはできるが、輸送手段(乗物)の位置が正確にわかっており、且つマップが誤差を含まない場合にのみ、これらのマップを用いて、極めて正確に補正を行うことができる。さらに、コリオリの効果によって歪められる垂直重力場は、乗物が動くことによってさらに歪められる。垂直方向において歪められることにより、水平重力異常として知られている水平方向の成分が生み出される。これらの異常は、加速度計誤差のように、慣性航法システムに影響を及ぼす。乗物が異常な重力場の中を横断するとき、シューラーループが引き起こされ、速度及び位置の誤差が生成され、それが時間とともに増加する。結果として、慣性航法システムが完全に、長期にわたって十分な精度を提供すべきである場合には、異常な重力場によって引き起こされる慣性センサ誤差がリアルタイムに補正されなければならない。
【0004】
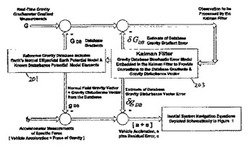
既知の受動型航法システムは、放射技術に頼ることなく、或いは外部航法の助けを借りることなく、乗物の位置、速度及び姿勢情報を連続して更新している。そのような従来技術のシステムは、重力センサ、重量測定マップ、垂直位置及び速度測定値を利用して航法情報を計算する。センサ及びマップデータはリアルタイムフィルタリングによって処理され、乗物の最良の位置、速度及び姿勢が計算される。測定された重力傾度と乗物の速度との積が時間積分され、北、東、下方重力ベクトル成分が求められ、これらの成分が、相補的なフィルタにおいて、垂直偏差マップから求められる対応する成分と合成される。その合成の北成分及び東成分は垂直偏差マップからの対応する成分と比較され、一方、重力の下方成分は重力計から求められる下方値と比較される。これらの比較からの残差(誤差)がカルマンフィルタにおいて用いられ、システム内の慣性測定ユニットを垂直偏差及び重力異常とは無関係にする補正値が与えられる。測定された重力傾度が基準マップ傾度と比較され、その残差をカルマンフィルタにおいて用いて、長期的な位置の誤差が推定され、グラジオメータのバイアス及びドリフトのための補正値が与えられる。垂直位置ループが、重力計から求められる重力下方データ及び積分器から求められる重力下方データを混合して、垂直位置が与えられ、それが、測定される乗物の高度と、ジオイドマップから求められる地形高度との間の差から導出される基準値と比較される。この比較の残差をカルマンフィルタにおいて用いて、東方向速度の推定値が改善される。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、当該技術分野において、依然として改善された航法システムが必要とされている。たとえば、地球の標準的な楕円重力モデルに対応する情報を提供する重力データベースを用いるだけでは、正確な航法には不十分な場合もある。また従来技術の装置は、標準的な方法において生じるグラジオメータ(傾度測定器)白色雑音(ホワイトノイズ)が積分されることに起因して、計算される重力擾乱ベクトル内に際限のない誤差が生じるという実用上の問題を抱えている。
【課題を解決するための手段】
【0006】
本発明は一実施態様において、重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するためのシステムを包含する。このシステムの一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備えることができ、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。
【0007】
本発明の別の実施態様は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
【0008】
本発明の例示的な実施態様の特徴は、以下の説明、特許請求の範囲及び添付の図面から明らかになるであろう。
【発明を実施するための最良の形態】
【0009】
ここで説明する特定の値及び構成は、変更することができ、単に本発明の一実施形態を例示するために記載されており、本発明の範囲を制限することは意図していない。
【0010】
原子干渉計慣性力センサは、回転、加速度及び重力傾度を測定するために、これまでに例のない性能を提供することが見込まれる。原子干渉計は既に、重力加速度に対する極めて高い感度を実証しており、回転運動に対して予測される感度は、実験室レベルの最良のリングレーザジャイロスコープの感度を超えている。これは、干渉する粒子の全質量エネルギーに比例する、そのサニャック効果による位相のずれが、光子が同じ形状を横断する場合よりも、原子の場合に1010倍大きいためである。
【0011】
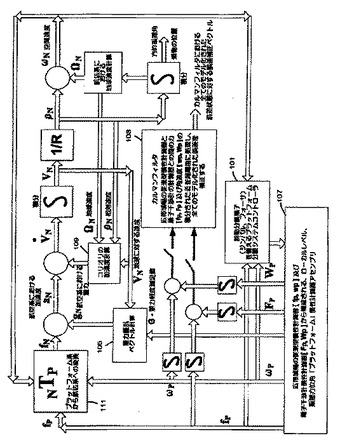
より広帯域幅の従来のジャイロ及び加速度計慣性センサを用いる原子干渉計(AI)慣性センサの標準的な積分のための信号の流れが図1に示される。従来型慣性(CI)センサが、数百ヘルツのサンプリングレートでの連続ストラップダウン航法手段を提供するために用いられ、AI慣性センサと共通の構成要素上に配置される。広帯域幅CIセンサは、プラットフォーム分離システムコントローラ101に力[fP]及び角速度[ωP]測定値を与え、システムコントローラ101は、それらの力[fP]及び角速度[ωP]測定値の連続性及び精度を最大にするためにAIセンサによって必要とされる動的な環境を提供する。図1に示されるように、CIセンサ及びAIセンサはサブシステム107の一部である。慣性計測器のための共通の構成要素は、北に対して「振揺のある方位」角において名目上「ローカルレベル」であり、地球の極において航法システム手段内に特異点が生じるのを避ける。しかしながら、「ストラップダウン」航法システムはCIセンサの連続した測定値を用いて機械化され、慣性計測器の小さな偏差がローカルレベルに対して調和するので、振揺方位角座標フレーム(系)は、極めて精度が高いことで知られている。
【0012】
同じ時間間隔にわたってAIセンサによって与えられる積分された角速度測定値及び積分された力測定値をCIセンサからの類似の積分された測定値と比較することにより、CIセンサ測定値内の誤差の観測値が与えられる。連続したCI測定値を用いて、観測されたCIセンサ誤差と、航法手段において生成された誤差との相関をとることにより、図示されたカルマンフィルタ機械化部103を用いて、CI測定値に起因する、その航法手段内の誤差を除去することができる。CI慣性センサとAI慣性センサとの間の測定値の差を観測することは、連続して行われる必要がないことに留意されたい。これらの観測値は、カルマンフィルタ103によって処理される前に、完全を期するためにモニタされる。
【0013】
一般的に、カルマンフィルタ103は、或る形態のフィードバック制御を用いることにより、或る過程を推定する。そのフィルタは、或る時点において、その過程の状態を推定し、その後、測定値(雑音を含む)の形でフィードバックを得る。その場合に、カルマンフィルタのための方程式は2つのグループ、すなわち、時間更新方程式及び測定値更新方程式に分かれる。時間更新方程式は、現在の状態及び誤差共分散推定値を(時間的に)先行して算出し、次の時間ステップのための事前推定値を求めるための役割を担う。測定値更新方程式は、フィードバックのための役割、すなわち、新たな測定値を事前推定値に取り込み、改善された事後推定値を求めるための役割を担う。時間更新方程式は、予測方程式と見なすことができ、一方、測定値更新方程式は、補正方程式と見なすことができる。
【0014】
AIセンサの力及び速度測定値に加えて、重力傾度[G]の測定値が与えられ、もし補償されなければ、CIセンサによって与えられる航法ソルーション(解法)に悪影響を及ぼすことになっていた、重力擾乱ベクトルを補償する。測定された傾度から、地球の標準的なポテンシャル場に関連する重力ベクトルの傾度[U]を引いて、ローカルレベル航法系においてシステムによって計算された乗物の速度[VN]を掛けて、「重力擾乱ベクトル計算」モジュール105において積分することにより、航法系内の重力擾乱ベクトルの変化[gN]が求められる。その後、CI加速度計の変換された力測定値から、その重力擾乱ベクトルが除去されて、ローカルレベル航法座標系内の慣性空間に対する乗物の加速度[aN]が求められる。計算されたコリオリの加速度(コリオリ加速度計算モジュール109)が除去されて、地球に対する乗物の速度の導関数が与えられ、その後、その導関数が積分されて、航法系において地球に対する乗物の速度[VN]が求められる。その後、システムによって計算された乗物の速度を積分することにより、地球に対する乗物の位置の変化、及び航法系の振揺方位角の変化が生成される。
【0015】
慣性計測器/プラットフォーム座標系[P]と航法座標系[N]との間の変換(プラットフォーム/航法座標変換モジュール111)は、慣性空間に対する角速度の連続したCIジャイロ測定値[ωP]から、慣性空間に対する航法座標のシステムによって計算された空間角速度[ωN]を引くことにより得られ、その空間角速度[ωN]は、地球に対する、システムによって計算された速度と、北及び地球角速度ベクトルの垂直成分を計算するために必要とされる、システムによって計算された緯度とから導出される。
【0016】
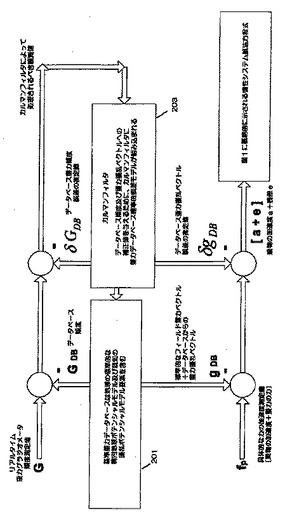
本発明の方法及びシステムの一実施形態は、上記のアーキテクチャよりも最適な航法システムアーキテクチャを提供する。この実施形態は、地球の重力場についての全ての事前に入手可能なデータと、グラジオメータから与えられる重力傾度のリアルタイム測定値とを処理する。このシステムは、NIMAによる世界的な重力擾乱ベクトルデータベースを利用しており、図2に示される。このデータベース201は、慣性航法システムシューラーループの帯域幅内の誤差の主な発生源である異常な重力場の長い波長を取り入れる。それゆえ、その機密扱いにされていないデータベースは、重力擾乱ベクトルに起因する誤差を低減する際に非常に有効である。
【0017】
以下に説明する処理のための概念はさらに、NIMA重力データベースが用いられない場合の、リアルタイムグラジオメータ測定の処理に関する。しかしながら、航法性能は、地球の標準的な楕円重力モデルに対応するものよりも多くの情報を提供する重力データベースを用いることにより改善される。またこの処理は、標準的な方法において生じるグラジオメータ白色雑音が積分されることに起因して、計算される重力擾乱ベクトル内に際限のない誤差が生じるという実用上の問題も回避する。
【0018】
図2に示すように、リアルタイム重力グラジオメータ傾度測定値(G)が、重力データベース201から入手可能な傾度(GDB)と比較され、モデル化された誤差状態ベクトルを補正するためのカルマンフィルタ203に観測値が与えられる。カルマンフィルタ203は、異常な重力傾度及び重力擾乱ベクトル内の誤差を取り入れる重力データベース内の誤差のための確率的(推計学的)モデルを含むことに留意されたい。傾度情報のカルマンフィルタ203における観測値の主な項は、リアルタイムグラジオメータ測定値内のランダムな誤差及びバイアスと、データベース内の傾度誤差とを含む。
【0019】
重力データベース201から入手可能な重力擾乱ベクトルを用いて、広帯域幅の従来型慣性(CI)加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去される。地球の標準的な重力モデルに対応する重力ベクトルも当然除去される。カルマンフィルタ203による重力データベース内の誤差のモデル化によって、慣性航法システム方程式において用いられるCI加速度計の力測定値から導出される乗物の加速度の誤差を低減するために、重力データベース擾乱ベクトルへの補正値も入手できることに留意されたい。この後者の重力擾乱ベクトル補正値は主に、測定された傾度と、カルマンフィルタ203によって処理された推定傾度との間の差をリアルタイムに観測することから導出される。
【0020】
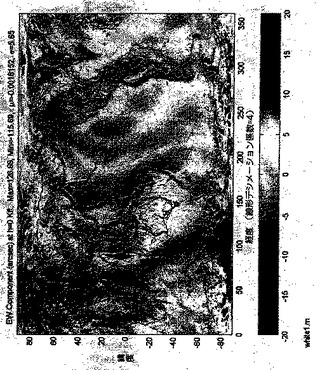
NIMAによって提供される重力データベースの一部の実例が図3及び図4に示されており、図3及び図4はそれぞれ、地球の表面における世界的な東−西偏差及び北−南偏差を示す。
【0021】
本発明の方法及びシステムの実施形態は、従来技術の航法システムより優れた改善形態を提供する。地球の標準的な楕円重力モデルに対応するものよりも多くの情報を提供する重力データベースを用いて、航法性能が改善される。この処理は、標準的な方法において生じるグラジオメータ白色雑音が積分されることに起因して、計算される重力擾乱ベクトル内に際限のない誤差が生じるという実用上の問題も回避する。
【0022】
本発明のシステム及び方法は、先に記載された具体的な例において説明した構成要素以外の種々のタイプの航法用の構成要素とともに用いることができる。
【0023】
本明細書に記載するステップ或いは動作は例示にすぎない。本発明の精神から逸脱することのない、これらのステップ或いは動作に対する数多くの変形形態が可能である。たとえば、それらのステップは異なる順序で実行することができるか、或いは複数のステップを追加、削除或いは変更することができる。
【0024】
本明細書において本発明の例示的な実施態様を詳細に図示及び説明したが、本発明の精神から逸脱することなく、種々の変更、追加、置換などを行うことができ、それゆえ、これらは特許請求の範囲に規定される本発明の範囲内に包含されることは当業者には明らかであろう。
【図面の簡単な説明】
【0025】
【図1】従来技術の航法システムの構成要素を示すブロック図である。
【図2】本発明の方法及びシステムの一実施形態による航法システムの構成要素を示すブロック図である。
【図3】本発明の方法及びシステムの一実施形態で用いるための重力データベースの一部を示す図である。
【図4】本発明の方法及びシステムの一実施形態で用いるための重力データベースの一部を示す図である。
【技術分野】
【0001】
本発明は概括的には慣性航法に関し、詳細には、重力データベースを用いて、非連続的な原子干渉計の慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理することに関する。
関連出願の相互参照
本願は、米国仮特許出願第60/485,050号(James R. Huddleによって、2003年7月3日に出願された、タイトル「A METHOD FOR THE PROCESSING OF NON-CONTINUOUS ATOM INTERFEROMETER INERTIAL INSTRUMENT MEASUREMENTS AND CONTINUOUS WIDE BANDWIDTH INSTRUMENT MEASUREMENTS WITH A GRAVITY DATABASE」)の優先権を主張するものである。
【背景技術】
【0002】
ジャイロスコープ及び加速度計だけを利用する従来技術の受動型航法システムは、そのようなシステムが長期にわたって動作するために一般的に必要とされる、連続した速度、位置及び姿勢精度を提供するものではない。これらの慣性センサがドリフト及び重力の影響によって位置、速度及び姿勢に誤差が生じるため、長期にわたって動作するための航法システムでは、それらのセンサしか使用しないことは許容できないものであった。これらの従来技術の慣性航法システムが長期にわたって動作するには、位置を周期的に更新する必要があった。これらの更新は一般的には、グローバル・ポジショニング・システム(GPS)、レーダ航法システム或いはソナーシステムからの位置決定によって実施された。
【0003】
ジャイロスコープ及び加速度計のような慣性計測器において大幅な改善がなされてきた。ドリフトは問題にならないレベルまで低減されており、誤差の主な発生源として重力の影響だけが残されている。慣性センサの性能を補正するために重量測定マップを利用することはできるが、輸送手段(乗物)の位置が正確にわかっており、且つマップが誤差を含まない場合にのみ、これらのマップを用いて、極めて正確に補正を行うことができる。さらに、コリオリの効果によって歪められる垂直重力場は、乗物が動くことによってさらに歪められる。垂直方向において歪められることにより、水平重力異常として知られている水平方向の成分が生み出される。これらの異常は、加速度計誤差のように、慣性航法システムに影響を及ぼす。乗物が異常な重力場の中を横断するとき、シューラーループが引き起こされ、速度及び位置の誤差が生成され、それが時間とともに増加する。結果として、慣性航法システムが完全に、長期にわたって十分な精度を提供すべきである場合には、異常な重力場によって引き起こされる慣性センサ誤差がリアルタイムに補正されなければならない。
【0004】
既知の受動型航法システムは、放射技術に頼ることなく、或いは外部航法の助けを借りることなく、乗物の位置、速度及び姿勢情報を連続して更新している。そのような従来技術のシステムは、重力センサ、重量測定マップ、垂直位置及び速度測定値を利用して航法情報を計算する。センサ及びマップデータはリアルタイムフィルタリングによって処理され、乗物の最良の位置、速度及び姿勢が計算される。測定された重力傾度と乗物の速度との積が時間積分され、北、東、下方重力ベクトル成分が求められ、これらの成分が、相補的なフィルタにおいて、垂直偏差マップから求められる対応する成分と合成される。その合成の北成分及び東成分は垂直偏差マップからの対応する成分と比較され、一方、重力の下方成分は重力計から求められる下方値と比較される。これらの比較からの残差(誤差)がカルマンフィルタにおいて用いられ、システム内の慣性測定ユニットを垂直偏差及び重力異常とは無関係にする補正値が与えられる。測定された重力傾度が基準マップ傾度と比較され、その残差をカルマンフィルタにおいて用いて、長期的な位置の誤差が推定され、グラジオメータのバイアス及びドリフトのための補正値が与えられる。垂直位置ループが、重力計から求められる重力下方データ及び積分器から求められる重力下方データを混合して、垂直位置が与えられ、それが、測定される乗物の高度と、ジオイドマップから求められる地形高度との間の差から導出される基準値と比較される。この比較の残差をカルマンフィルタにおいて用いて、東方向速度の推定値が改善される。
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、当該技術分野において、依然として改善された航法システムが必要とされている。たとえば、地球の標準的な楕円重力モデルに対応する情報を提供する重力データベースを用いるだけでは、正確な航法には不十分な場合もある。また従来技術の装置は、標準的な方法において生じるグラジオメータ(傾度測定器)白色雑音(ホワイトノイズ)が積分されることに起因して、計算される重力擾乱ベクトル内に際限のない誤差が生じるという実用上の問題を抱えている。
【課題を解決するための手段】
【0006】
本発明は一実施態様において、重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するためのシステムを包含する。このシステムの一実施形態は、傾度を有する重力擾乱ベクトルデータベースと、リアルタイム重力グラジオメータ傾度測定値とデータベースからの傾度とを比較して、観測値を与えるコンパレータと、入力において観測値を受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備えることができ、重力データベースからの重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される。
【0007】
本発明の別の実施態様は、記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、重力傾度のリアルタイム測定値を与えるステップと、記憶された傾度及び重力傾度を処理して、航法用データを形成するステップとを有することができる。
【0008】
本発明の例示的な実施態様の特徴は、以下の説明、特許請求の範囲及び添付の図面から明らかになるであろう。
【発明を実施するための最良の形態】
【0009】
ここで説明する特定の値及び構成は、変更することができ、単に本発明の一実施形態を例示するために記載されており、本発明の範囲を制限することは意図していない。
【0010】
原子干渉計慣性力センサは、回転、加速度及び重力傾度を測定するために、これまでに例のない性能を提供することが見込まれる。原子干渉計は既に、重力加速度に対する極めて高い感度を実証しており、回転運動に対して予測される感度は、実験室レベルの最良のリングレーザジャイロスコープの感度を超えている。これは、干渉する粒子の全質量エネルギーに比例する、そのサニャック効果による位相のずれが、光子が同じ形状を横断する場合よりも、原子の場合に1010倍大きいためである。
【0011】
より広帯域幅の従来のジャイロ及び加速度計慣性センサを用いる原子干渉計(AI)慣性センサの標準的な積分のための信号の流れが図1に示される。従来型慣性(CI)センサが、数百ヘルツのサンプリングレートでの連続ストラップダウン航法手段を提供するために用いられ、AI慣性センサと共通の構成要素上に配置される。広帯域幅CIセンサは、プラットフォーム分離システムコントローラ101に力[fP]及び角速度[ωP]測定値を与え、システムコントローラ101は、それらの力[fP]及び角速度[ωP]測定値の連続性及び精度を最大にするためにAIセンサによって必要とされる動的な環境を提供する。図1に示されるように、CIセンサ及びAIセンサはサブシステム107の一部である。慣性計測器のための共通の構成要素は、北に対して「振揺のある方位」角において名目上「ローカルレベル」であり、地球の極において航法システム手段内に特異点が生じるのを避ける。しかしながら、「ストラップダウン」航法システムはCIセンサの連続した測定値を用いて機械化され、慣性計測器の小さな偏差がローカルレベルに対して調和するので、振揺方位角座標フレーム(系)は、極めて精度が高いことで知られている。
【0012】
同じ時間間隔にわたってAIセンサによって与えられる積分された角速度測定値及び積分された力測定値をCIセンサからの類似の積分された測定値と比較することにより、CIセンサ測定値内の誤差の観測値が与えられる。連続したCI測定値を用いて、観測されたCIセンサ誤差と、航法手段において生成された誤差との相関をとることにより、図示されたカルマンフィルタ機械化部103を用いて、CI測定値に起因する、その航法手段内の誤差を除去することができる。CI慣性センサとAI慣性センサとの間の測定値の差を観測することは、連続して行われる必要がないことに留意されたい。これらの観測値は、カルマンフィルタ103によって処理される前に、完全を期するためにモニタされる。
【0013】
一般的に、カルマンフィルタ103は、或る形態のフィードバック制御を用いることにより、或る過程を推定する。そのフィルタは、或る時点において、その過程の状態を推定し、その後、測定値(雑音を含む)の形でフィードバックを得る。その場合に、カルマンフィルタのための方程式は2つのグループ、すなわち、時間更新方程式及び測定値更新方程式に分かれる。時間更新方程式は、現在の状態及び誤差共分散推定値を(時間的に)先行して算出し、次の時間ステップのための事前推定値を求めるための役割を担う。測定値更新方程式は、フィードバックのための役割、すなわち、新たな測定値を事前推定値に取り込み、改善された事後推定値を求めるための役割を担う。時間更新方程式は、予測方程式と見なすことができ、一方、測定値更新方程式は、補正方程式と見なすことができる。
【0014】
AIセンサの力及び速度測定値に加えて、重力傾度[G]の測定値が与えられ、もし補償されなければ、CIセンサによって与えられる航法ソルーション(解法)に悪影響を及ぼすことになっていた、重力擾乱ベクトルを補償する。測定された傾度から、地球の標準的なポテンシャル場に関連する重力ベクトルの傾度[U]を引いて、ローカルレベル航法系においてシステムによって計算された乗物の速度[VN]を掛けて、「重力擾乱ベクトル計算」モジュール105において積分することにより、航法系内の重力擾乱ベクトルの変化[gN]が求められる。その後、CI加速度計の変換された力測定値から、その重力擾乱ベクトルが除去されて、ローカルレベル航法座標系内の慣性空間に対する乗物の加速度[aN]が求められる。計算されたコリオリの加速度(コリオリ加速度計算モジュール109)が除去されて、地球に対する乗物の速度の導関数が与えられ、その後、その導関数が積分されて、航法系において地球に対する乗物の速度[VN]が求められる。その後、システムによって計算された乗物の速度を積分することにより、地球に対する乗物の位置の変化、及び航法系の振揺方位角の変化が生成される。
【0015】
慣性計測器/プラットフォーム座標系[P]と航法座標系[N]との間の変換(プラットフォーム/航法座標変換モジュール111)は、慣性空間に対する角速度の連続したCIジャイロ測定値[ωP]から、慣性空間に対する航法座標のシステムによって計算された空間角速度[ωN]を引くことにより得られ、その空間角速度[ωN]は、地球に対する、システムによって計算された速度と、北及び地球角速度ベクトルの垂直成分を計算するために必要とされる、システムによって計算された緯度とから導出される。
【0016】
本発明の方法及びシステムの一実施形態は、上記のアーキテクチャよりも最適な航法システムアーキテクチャを提供する。この実施形態は、地球の重力場についての全ての事前に入手可能なデータと、グラジオメータから与えられる重力傾度のリアルタイム測定値とを処理する。このシステムは、NIMAによる世界的な重力擾乱ベクトルデータベースを利用しており、図2に示される。このデータベース201は、慣性航法システムシューラーループの帯域幅内の誤差の主な発生源である異常な重力場の長い波長を取り入れる。それゆえ、その機密扱いにされていないデータベースは、重力擾乱ベクトルに起因する誤差を低減する際に非常に有効である。
【0017】
以下に説明する処理のための概念はさらに、NIMA重力データベースが用いられない場合の、リアルタイムグラジオメータ測定の処理に関する。しかしながら、航法性能は、地球の標準的な楕円重力モデルに対応するものよりも多くの情報を提供する重力データベースを用いることにより改善される。またこの処理は、標準的な方法において生じるグラジオメータ白色雑音が積分されることに起因して、計算される重力擾乱ベクトル内に際限のない誤差が生じるという実用上の問題も回避する。
【0018】
図2に示すように、リアルタイム重力グラジオメータ傾度測定値(G)が、重力データベース201から入手可能な傾度(GDB)と比較され、モデル化された誤差状態ベクトルを補正するためのカルマンフィルタ203に観測値が与えられる。カルマンフィルタ203は、異常な重力傾度及び重力擾乱ベクトル内の誤差を取り入れる重力データベース内の誤差のための確率的(推計学的)モデルを含むことに留意されたい。傾度情報のカルマンフィルタ203における観測値の主な項は、リアルタイムグラジオメータ測定値内のランダムな誤差及びバイアスと、データベース内の傾度誤差とを含む。
【0019】
重力データベース201から入手可能な重力擾乱ベクトルを用いて、広帯域幅の従来型慣性(CI)加速度計の具体的な力測定値から、実際の重力擾乱ベクトルの既知の部分が除去される。地球の標準的な重力モデルに対応する重力ベクトルも当然除去される。カルマンフィルタ203による重力データベース内の誤差のモデル化によって、慣性航法システム方程式において用いられるCI加速度計の力測定値から導出される乗物の加速度の誤差を低減するために、重力データベース擾乱ベクトルへの補正値も入手できることに留意されたい。この後者の重力擾乱ベクトル補正値は主に、測定された傾度と、カルマンフィルタ203によって処理された推定傾度との間の差をリアルタイムに観測することから導出される。
【0020】
NIMAによって提供される重力データベースの一部の実例が図3及び図4に示されており、図3及び図4はそれぞれ、地球の表面における世界的な東−西偏差及び北−南偏差を示す。
【0021】
本発明の方法及びシステムの実施形態は、従来技術の航法システムより優れた改善形態を提供する。地球の標準的な楕円重力モデルに対応するものよりも多くの情報を提供する重力データベースを用いて、航法性能が改善される。この処理は、標準的な方法において生じるグラジオメータ白色雑音が積分されることに起因して、計算される重力擾乱ベクトル内に際限のない誤差が生じるという実用上の問題も回避する。
【0022】
本発明のシステム及び方法は、先に記載された具体的な例において説明した構成要素以外の種々のタイプの航法用の構成要素とともに用いることができる。
【0023】
本明細書に記載するステップ或いは動作は例示にすぎない。本発明の精神から逸脱することのない、これらのステップ或いは動作に対する数多くの変形形態が可能である。たとえば、それらのステップは異なる順序で実行することができるか、或いは複数のステップを追加、削除或いは変更することができる。
【0024】
本明細書において本発明の例示的な実施態様を詳細に図示及び説明したが、本発明の精神から逸脱することなく、種々の変更、追加、置換などを行うことができ、それゆえ、これらは特許請求の範囲に規定される本発明の範囲内に包含されることは当業者には明らかであろう。
【図面の簡単な説明】
【0025】
【図1】従来技術の航法システムの構成要素を示すブロック図である。
【図2】本発明の方法及びシステムの一実施形態による航法システムの構成要素を示すブロック図である。
【図3】本発明の方法及びシステムの一実施形態で用いるための重力データベースの一部を示す図である。
【図4】本発明の方法及びシステムの一実施形態で用いるための重力データベースの一部を示す図である。
【特許請求の範囲】
【請求項1】
重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理する方法であって、
記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、
重力傾度のリアルタイム測定値を提供するステップと、
前記記憶された傾度及び前記重力傾度を処理して、航法用データを形成するステップと、
を含む方法。
【請求項2】
請求項1記載の方法において、さらに、
リアルタイム重力グラジオメータ傾度測定値を前記データベースからの傾度と比較して、観測値を与えるステップと、
前記観測値を、モデル化された誤差状態ベクトルを補正するためのカルマンフィルタに供給するステップと、
前記重力データベースからの前記重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の特定の力測定値から、実際の重力擾乱ベクトルの既知の部分を除去するステップと、
を含む方法。
【請求項3】
請求項2記載の方法において、前記カルマンフィルタは、異常な重力傾度及び前記重力擾乱ベクトルの誤差を組み入れる前記データベース内の誤差のための確率的モデルを有する、方法。
【請求項4】
請求項2記載の方法において、傾度情報のカルマンフィルタ観測値は、前記リアルタイム重力グラジオメータ傾度測定値内の少なくともランダムな誤差及びバイアス、並びに前記データベース内の前記傾度誤差を有する、方法。
【請求項5】
請求項2記載の方法において、さらに、地球の標準的な重力モデルに対応する重力ベクトルを除去することを含む、方法。
【請求項6】
請求項2記載の方法において、前記カルマンフィルタによる前記重力データベース内の誤差のモデル化によって、前記重力データベース擾乱ベクトルへの補正値を用いて、慣性航法システム方程式において用いられる従来型慣性加速度計の力測定値から導出される加速度の誤差が低減される、方法。
【請求項7】
請求項6記載の方法において、前記重力擾乱ベクトルへの補正値は主に、測定された傾度と前記カルマンフィルタによって処理された推定傾度との間の差をリアルタイムに観測することから導出される、方法。
【請求項8】
重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理する方法であって、
傾度を有する重力擾乱ベクトルデータベースを設けるステップと、
リアルタイム重力グラジオメータ傾度測定値を前記データベースからの傾度と比較して、観測値を提供するステップと、
前記観測値をモデル化された誤差状態ベクトルを補正するためのカルマンフィルタに供給するステップと、
前記重力データベースからの前記重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の特定の力測定値から、実際の重力擾乱ベクトルの既知の部分を除去し、それにより航法データを形成するステップと、
を含む、方法。
【請求項9】
請求項8記載の方法において、前記カルマンフィルタは、異常な重力傾度及び前記重力擾乱ベクトルの誤差を組み入れる前記データベース内の誤差のための確率的モデルを有する、方法。
【請求項10】
請求項8記載の方法において、傾度情報のカルマンフィルタ観測値は、前記リアルタイム重力グラジオメータ傾度測定値内の少なくともランダムな誤差及びバイアス、並びに前記データベース内の前記傾度誤差を有する、方法。
【請求項11】
請求項8記載の方法において、さらに、地球の標準的な重力モデルに対応する重力ベクトルを除去することを含む、方法。
【請求項12】
請求項8記載の方法において、前記カルマンフィルタによる前記重力データベース内の誤差のモデル化によって、前記重力データベース擾乱ベクトルへの補正値を用いて、慣性航法システム方程式において用いられる従来型慣性加速度計の力測定値から導出される加速度の誤差が低減される、方法。
【請求項13】
請求項12記載の方法において、前記重力擾乱ベクトルへの補正値は主に、測定された傾度と前記カルマンフィルタによって処理された推定傾度との間の差をリアルタイムに観測することから導出される、方法。
【請求項14】
重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するシステムであって、
傾度を有する重力擾乱ベクトルデータベースと、
リアルタイム重力グラジオメータ傾度測定値と、前記データベースからの傾度とを比較して、観測値を与えるコンパレータと、
前記観測値を入力において受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、
前記重力データベースからの前記重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の特定の力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される、システム。
【請求項15】
請求項14記載のシステムにおいて、前記カルマンフィルタは、異常な重力傾度及び前記重力擾乱ベクトルの誤差を組み入れる前記データベース内の誤差のための確率的モデルを有する、システム。
【請求項16】
請求項14記載のシステムにおいて、傾度情報のカルマンフィルタ観測値は、前記リアルタイム重力グラジオメータ傾度測定値内の少なくともランダムな誤差及びバイアス、並びに前記データベース内の傾度誤差を有する、システム。
【請求項17】
請求項14記載のシステムにおいて、地球の標準的な重力モデルに対応する重力ベクトルが除去される、システム。
【請求項18】
請求項14記載のシステムにおいて、前記カルマンフィルタによる前記重力データベース内の誤差のモデル化によって、前記重力データベース擾乱ベクトルへの補正値を用いて、慣性航法システム方程式において用いられる従来型慣性加速度計の力測定値から導出される加速度の誤差が低減される、システム。
【請求項19】
請求項18記載のシステムにおいて、前記重力擾乱ベクトルへの補正値は主に、測定された傾度と前記カルマンフィルタによって処理された推定傾度との間の差をリアルタイムに観測することから導出される、システム。
【請求項20】
請求項18記載のシステムにおいて、前記重力擾乱ベクトルデータベースは、地球の表面の少なくとも一部を表す、システム。
【請求項1】
重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理する方法であって、
記憶された傾度を有する重力擾乱ベクトルデータベースを設けるステップと、
重力傾度のリアルタイム測定値を提供するステップと、
前記記憶された傾度及び前記重力傾度を処理して、航法用データを形成するステップと、
を含む方法。
【請求項2】
請求項1記載の方法において、さらに、
リアルタイム重力グラジオメータ傾度測定値を前記データベースからの傾度と比較して、観測値を与えるステップと、
前記観測値を、モデル化された誤差状態ベクトルを補正するためのカルマンフィルタに供給するステップと、
前記重力データベースからの前記重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の特定の力測定値から、実際の重力擾乱ベクトルの既知の部分を除去するステップと、
を含む方法。
【請求項3】
請求項2記載の方法において、前記カルマンフィルタは、異常な重力傾度及び前記重力擾乱ベクトルの誤差を組み入れる前記データベース内の誤差のための確率的モデルを有する、方法。
【請求項4】
請求項2記載の方法において、傾度情報のカルマンフィルタ観測値は、前記リアルタイム重力グラジオメータ傾度測定値内の少なくともランダムな誤差及びバイアス、並びに前記データベース内の前記傾度誤差を有する、方法。
【請求項5】
請求項2記載の方法において、さらに、地球の標準的な重力モデルに対応する重力ベクトルを除去することを含む、方法。
【請求項6】
請求項2記載の方法において、前記カルマンフィルタによる前記重力データベース内の誤差のモデル化によって、前記重力データベース擾乱ベクトルへの補正値を用いて、慣性航法システム方程式において用いられる従来型慣性加速度計の力測定値から導出される加速度の誤差が低減される、方法。
【請求項7】
請求項6記載の方法において、前記重力擾乱ベクトルへの補正値は主に、測定された傾度と前記カルマンフィルタによって処理された推定傾度との間の差をリアルタイムに観測することから導出される、方法。
【請求項8】
重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理する方法であって、
傾度を有する重力擾乱ベクトルデータベースを設けるステップと、
リアルタイム重力グラジオメータ傾度測定値を前記データベースからの傾度と比較して、観測値を提供するステップと、
前記観測値をモデル化された誤差状態ベクトルを補正するためのカルマンフィルタに供給するステップと、
前記重力データベースからの前記重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の特定の力測定値から、実際の重力擾乱ベクトルの既知の部分を除去し、それにより航法データを形成するステップと、
を含む、方法。
【請求項9】
請求項8記載の方法において、前記カルマンフィルタは、異常な重力傾度及び前記重力擾乱ベクトルの誤差を組み入れる前記データベース内の誤差のための確率的モデルを有する、方法。
【請求項10】
請求項8記載の方法において、傾度情報のカルマンフィルタ観測値は、前記リアルタイム重力グラジオメータ傾度測定値内の少なくともランダムな誤差及びバイアス、並びに前記データベース内の前記傾度誤差を有する、方法。
【請求項11】
請求項8記載の方法において、さらに、地球の標準的な重力モデルに対応する重力ベクトルを除去することを含む、方法。
【請求項12】
請求項8記載の方法において、前記カルマンフィルタによる前記重力データベース内の誤差のモデル化によって、前記重力データベース擾乱ベクトルへの補正値を用いて、慣性航法システム方程式において用いられる従来型慣性加速度計の力測定値から導出される加速度の誤差が低減される、方法。
【請求項13】
請求項12記載の方法において、前記重力擾乱ベクトルへの補正値は主に、測定された傾度と前記カルマンフィルタによって処理された推定傾度との間の差をリアルタイムに観測することから導出される、方法。
【請求項14】
重力データベースを用いて、非連続的な原子干渉計慣性計測器測定値及び連続的な広帯域幅計測器測定値を処理するシステムであって、
傾度を有する重力擾乱ベクトルデータベースと、
リアルタイム重力グラジオメータ傾度測定値と、前記データベースからの傾度とを比較して、観測値を与えるコンパレータと、
前記観測値を入力において受信し、モデル化された誤差状態ベクトルを出力するカルマンフィルタとを備え、
前記重力データベースからの前記重力擾乱ベクトルを用いて、広帯域幅の従来型慣性加速度計の特定の力測定値から、実際の重力擾乱ベクトルの既知の部分が除去され、それにより航法データが形成される、システム。
【請求項15】
請求項14記載のシステムにおいて、前記カルマンフィルタは、異常な重力傾度及び前記重力擾乱ベクトルの誤差を組み入れる前記データベース内の誤差のための確率的モデルを有する、システム。
【請求項16】
請求項14記載のシステムにおいて、傾度情報のカルマンフィルタ観測値は、前記リアルタイム重力グラジオメータ傾度測定値内の少なくともランダムな誤差及びバイアス、並びに前記データベース内の傾度誤差を有する、システム。
【請求項17】
請求項14記載のシステムにおいて、地球の標準的な重力モデルに対応する重力ベクトルが除去される、システム。
【請求項18】
請求項14記載のシステムにおいて、前記カルマンフィルタによる前記重力データベース内の誤差のモデル化によって、前記重力データベース擾乱ベクトルへの補正値を用いて、慣性航法システム方程式において用いられる従来型慣性加速度計の力測定値から導出される加速度の誤差が低減される、システム。
【請求項19】
請求項18記載のシステムにおいて、前記重力擾乱ベクトルへの補正値は主に、測定された傾度と前記カルマンフィルタによって処理された推定傾度との間の差をリアルタイムに観測することから導出される、システム。
【請求項20】
請求項18記載のシステムにおいて、前記重力擾乱ベクトルデータベースは、地球の表面の少なくとも一部を表す、システム。
【図1】


【図2】
【図3】

【図4】
【図2】
【図3】
【図4】
【公表番号】特表2007−536499(P2007−536499A)
【公表日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願番号】特願2006−518807(P2006−518807)
【出願日】平成16年7月2日(2004.7.2)
【国際出願番号】PCT/US2004/021406
【国際公開番号】WO2005/008180
【国際公開日】平成17年1月27日(2005.1.27)
【出願人】(503123152)ノースロップ・グラマン・コーポレーション (31)
【氏名又は名称原語表記】NORTHROP GRUMMAN CORPORATION
【Fターム(参考)】
【公表日】平成19年12月13日(2007.12.13)
【国際特許分類】
【出願日】平成16年7月2日(2004.7.2)
【国際出願番号】PCT/US2004/021406
【国際公開番号】WO2005/008180
【国際公開日】平成17年1月27日(2005.1.27)
【出願人】(503123152)ノースロップ・グラマン・コーポレーション (31)
【氏名又は名称原語表記】NORTHROP GRUMMAN CORPORATION
【Fターム(参考)】
[ Back to top ]