
測定装置、測定方法、及び、測定プログラム
【課題】歩行機能の低下を的確に評価するための情報を取得する測定装置、測定方法、測定プログラムを提供する。
【解決手段】人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサー110からの出力を取得する変換部120と、センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を測定する制御手段140とを備える測定装置100を利用者の腰背部中央に設置する。これにより、測定装置100は、歩行機能の低下を的確に評価するための情報である両足接地時間を取得する。
【解決手段】人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサー110からの出力を取得する変換部120と、センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を測定する制御手段140とを備える測定装置100を利用者の腰背部中央に設置する。これにより、測定装置100は、歩行機能の低下を的確に評価するための情報である両足接地時間を取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定装置、測定方法、及び、測定プログラムに関する。
【背景技術】
【0002】
大腿骨頚部を骨折して歩けなくなった高齢者の5年生存率は50%である。歩行機能の低下は高齢者の寿命に大きな影響を与える。特許文献1には、歩数センサーで計測した歩数情報を基に、歩行距離や消費カロリー等の健康管理指標を表示する歩数計が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−258042号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の歩数計は歩行距離等の運動量の大小を指標としているために、例えば、冬場の寒さのために一日中家から出ない場合等、運動量がもともと少ない場合は、歩行機能の低下を的確に評価できないという問題がある。
【0005】
本発明はこのような問題に鑑みてなされたものであり、歩行機能の低下を的確に評価するための情報を取得する測定装置、測定方法、及び、測定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の第1の観点にかかる測定装置は、
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得手段と、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を測定する両足接地時間測定手段と、を備える、
ことを特徴とする。
【0007】
前記センサー出力取得手段は、
2以上の方向の加速度の計測出力をそれぞれ取得する手段、を備え、
前記両足接地時間測定手段は、
2以上の方向の加速度を基に両足接地時間を測定する手段、を備えていてもよい。
【0008】
前記センサー出力取得手段は、
進行方向への加速度である前後加速度の計測出力を取得する手段と、
鉛直方向への加速度である上下加速度の計測出力を取得する手段と、を備え、
前記両足接地時間測定手段は、
前記前後加速度が増加から減少もしくは減少から増加に転じるタイミングを基に踵接地時を判別する手段と、
前記上下加速度が増加から減少もしくは減少から増加に転じるタイミングを基に爪先離地時を判別する手段と、
踵接地から踵接地直後の爪先離地までに要した時間を測定する手段と、を備えていてもよい。
【0009】
前記センサー出力取得手段は、
進行方向への加速度である前後加速度の計測出力を取得する手段、を備え、
前記両足接地時間測定手段は、
2以上の方向の加速度をベクトル合成して合成加速度を取得する手段と、
前記前後加速度が増加から減少もしくは減少から増加に転じるタイミングを基に踵接地時を判別する手段と、
前記合成加速度が増加から減少に転じるタイミングを基に爪先離地時を判別する手段と、
踵接地から踵接地直後の爪先離地までに要した時間を測定する手段と、備えていてもよい。
【0010】
1歩行周期にかかる時間を取得する1歩行周期時間取得手段と、
1歩行周期にかかる時間と1歩行周期あたりの両足接地時間とを基に、1歩行周期に占める両足接地時間の割合を算出する算出手段と、
両足接地時間の割合が所定の閾値以上であるか否かを判別する判別手段と、を備えていてもよい。
【0011】
前記センサー出力取得手段は、
左右方向への加速度である左右加速度の計測出力を取得する手段、を備え、
1歩行周期時間取得手段は、
前記左右加速度の計測出力を基に、1歩行周期にかかる時間を取得する手段、を備えていてもよい。
【0012】
歩行者の年齢、性別、身長、体重、または歩幅の情報を入力する情報入力手段と、
前記情報入力手段に入力された情報を基に、前記閾値を取得する閾値取得手段と、を備えていてもよい。
【0013】
上記目的を達成するため、本発明の第2の観点にかかる測定方法は、
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得ステップと、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を取得する両足接地時間取得ステップと、を有する、
ことを特徴とする。
【0014】
上記目的を達成するため、本発明の第3の観点にかかる測定プログラムは、
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得ステップと、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を取得する両足接地時間取得ステップと、をコンピュータに実行させる、
ことを特徴とする。
【発明の効果】
【0015】
歩行機能の低下を的確に評価するための情報を取得する測定装置、測定方法、及び、測定プログラムを提供できる。
【図面の簡単な説明】
【0016】
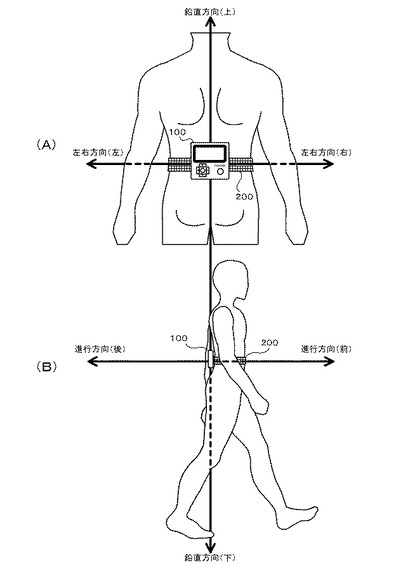
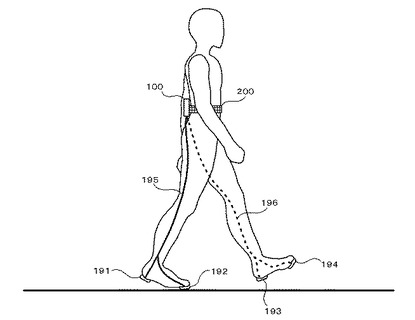
【図1】実施形態1に係る測定装置を人に取り付けた様子を示す図であり、(A)は測定装置を取り付けた人を背面から見た図であり、(B)は測定装置を取り付けた人を右側面から見た図である。
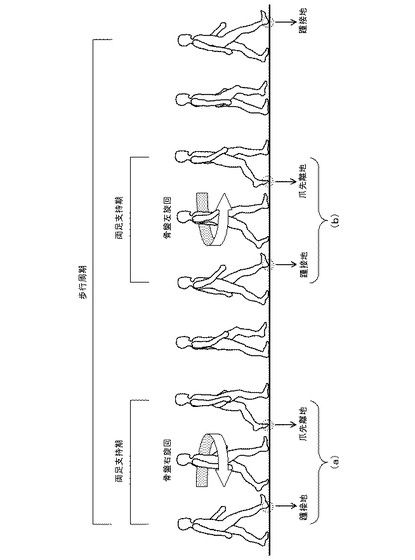
【図2】歩行周期および両足接地時間を説明するための図である。
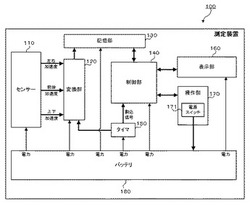
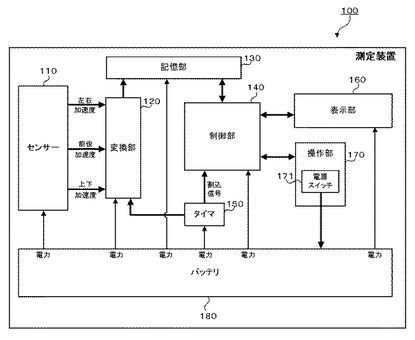
【図3】実施形態1および2に係る測定装置の構成を示すブロック図である。
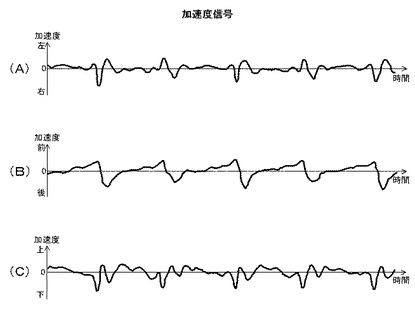
【図4】測定装置のセンサーから出力される電気信号からノイズを除去して生成される加速度信号を示す図であり、(A)は左右加速度を示す加速度信号、(B)は前後加速度を示す加速度信号、(C)は上下加速度を示す加速度信号である。
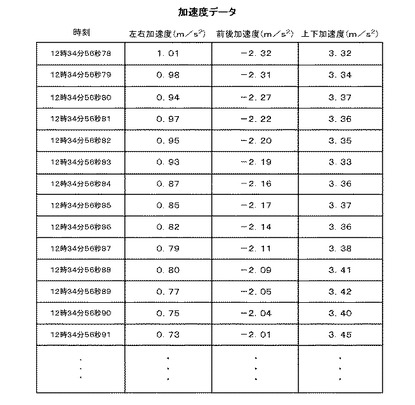
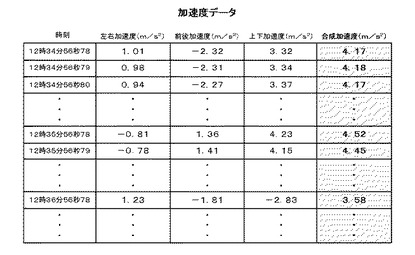
【図5】加速度信号を所定周期でサンプリングすることによって生成されるデジタルデータ(加速度データ)を示す図である。
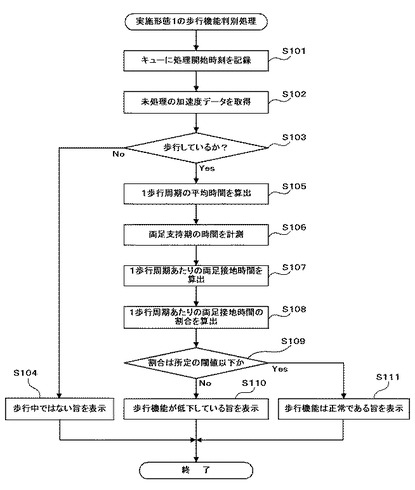
【図6】実施形態1に係る歩行機能判別処理を説明するためのフローチャートである。
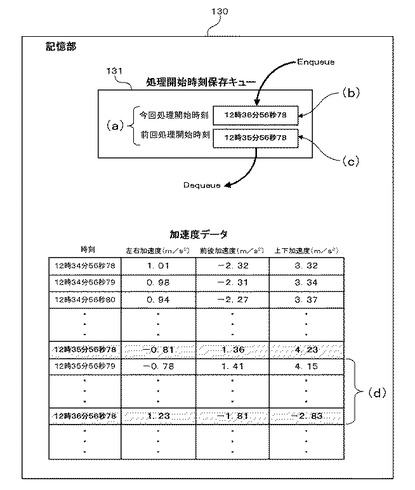
【図7】歩行機能判別処理の開始時刻を保存するための処理開始時刻保存キューと、記憶部に保存された加速度データとを示す図である。
【図8】骨盤の旋回方向が変わるタイミング付近で左右加速度に現れるS字波形を説明するための図である。
【図9】利用者が歩行中ではないと判別した際に、測定装置の表示部に表示される、歩行中ではない旨が表示を示す図である。
【図10】骨盤の旋回方向の変化を示すS字波形が1歩行周期中に2回現れる様子を示す図である。
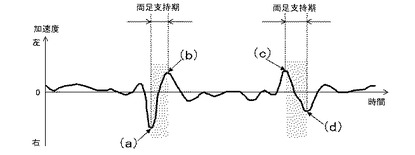
【図11】前後加速度および上下加速度から「踵接地」時および「爪先離地」時を判別する様子を説明するための図であり、(A)は前後加速度が「踵接地」時に前方向から後方向への変曲点を示すことを説明するための図であり、(B)は上下加速度が「爪先離地」時に上方向から下方向への変曲点を示すことを説明するための図である。
【図12】前後加速度の「前後変曲点」から上下加速度の「上下変曲点」までをそれぞれ両足支持期に要した時間として、1歩行周期に占める両足接地時間を算出する様子を示す図である。
【図13】表示部に表示された判別結果を示す図であり、(A)は利用者の歩行機能が低下している旨を表示した様子を示す図であり、(B)は利用者の歩行機能が正常である旨を表示した様子を示す図である。
【図14】上下加速度の上下変曲点から次の下方向から上方向への変曲点までを両足支持期と判別する様子を示す図である。
【図15】前後加速度の前後変曲点から次の後方向から前方向への変曲点までを両足支持期と判別する様子を示す図である。
【図16】左右加速度のS字波形の最初の変曲点から次の変曲点までを両足支持期と判別する様子を示す図である。
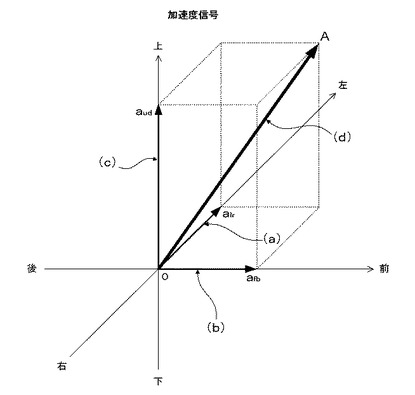
【図17】歩行時のある時点における左右加速度の大きさと方向を示すベクトル(a)と、前後加速度の大きさと方向を示すベクトル(b)と、上下加速度の大きさと方向を示すベクトル(c)とをベクトル合成して生成される合成加速度(d)を説明するための図である。
【図18】図5に示す加速度データの各データに対し、合成加速度のデータを加えた図である。
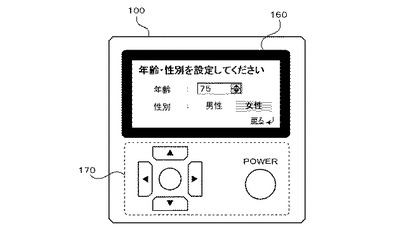
【図19】測定装置に歩行者の年齢や性別を設定するためのメニュー画面を示す図である。
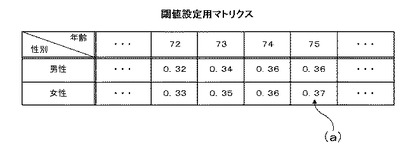
【図20】歩行者の年齢や性別の情報を基に、歩行機能の低下を判別するための閾値を設定するための閾値設定用マトリクスを説明するための図である。
【図21】圧力センサーを両足の踵と爪先に取り付け、それらを信号線で測定装置の本体と接続した様子を示す図である。
【図22】実施形態2に係る歩行機能判別処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0017】
(実施形態1)
本実施形態の測定装置100は、人体に加わる加速度を加速度センサーで計測し、その計測値を基に両足接地時間を測定するための装置である。また、測定装置100は、測定した両足接地時間を基に、利用者の歩行機能が低下しているか否かを判別するための装置である。この測定装置100は、例えば、身体重心がある第3腰椎付近(例えば、図1に示すように、ベルト200の腰背部中央付近)に取り付けて使用される。
【0018】
なお、本実施形態では、歩行周期に占める両足接地時間の割合を基に、歩行機能の低下を判別する。これは、高齢や障害等により脚力や関節機能等が低下すると、片脚でバランスをとるのが困難になり、おのずと歩行中の両足接地時間が長くなることに着目したものである。なお、「歩行周期」とは、人の歩行サイクルのことであり、例えば、図2に示すように、右足(または左足)の踵が接地してから次に右足(または左足)の踵が接地するまでの期間のことをいう。また、「両足接地時間」とは、歩行中の両足支持期(ダブルサポート)に要する時間のことであり、例えば、右足の「踵接地」から直後の左足の「爪先離地」までの時間(図2に示す(a))、および、左足の「踵接地」から直後の右足の「爪先離地」までの時間(図2に示す(b))ことをいう。
【0019】
以下、測定装置100の構成について、図面を参照しながら説明する。測定装置100は、図3に示すように、センサー110と、変換部120と、記憶部130と、制御部140と、タイマ150と、表示部160と、操作部170と、バッテリ180から構成される。
【0020】
センサー110は、MEMS(Micro Electro Mechanical Systems)センサー等の3軸加速度センサーであり、歩行時の進行方向、左右方向、および鉛直方向への加速度を計測する。なお、以下の説明では、進行方向への加速度を「前後加速度」、左右方向への加速度を「左右加速度」、鉛直方向への加速度を「上下加速度」と呼ぶ。計測された加速度は、順次、変換部120に出力される。
【0021】
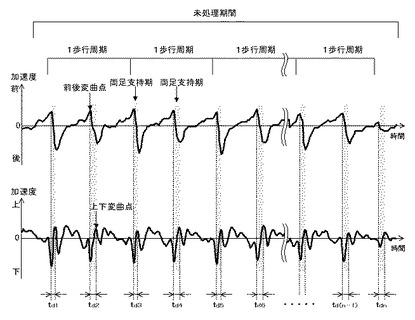
変換部120は、ノイズ除去用のフィルタやA/D(Analog/Digital)コンバータ等から構成され、センサー110から出力された電気信号からノイズを除去して図4(A)〜(C)に示すような「加速度信号」を生成する。また、変換部120は、加速度信号を所定周期でサンプリングして、図5に示すような「加速度データ」を生成する。変換部120は、生成した加速度データを、順次、記憶部130に格納する。
【0022】
記憶部130は、RAM(Random Access Memory)等の記憶装置から構成され、プログラムや加速度データ等の各種データを記憶する。
【0023】
制御部140は、CPU(Central Processing Unit)等のプロセッサから構成され、記憶部130に格納されているプログラムに従って動作し、後述の「歩行機能判別処理」を含む種々の動作を実行する。
【0024】
タイマ150は、水晶発振子等の計時装置から構成され、現在時刻を計時して変換部120および制御部140に送信する。また、タイマ150は、制御部140に対し、所定時間毎に(例えば1分毎に)、歩行機能判別処理の開始トリガとなる「割込信号」を送信する。
【0025】
表示部160は、液晶パネル等の表示装置から構成され、制御部140の制御に従って判別結果等の各種情報を表示する。
【0026】
操作部170は、各種操作用のスイッチから構成され、その中には、測定装置100の駆動を開始するための電源スイッチ171が含まれる。
【0027】
バッテリ180は、リチウムイオン電池等の蓄電装置から構成され、利用者等により電源スイッチ171が押されると、各部に電力の供給を開始する。
【0028】
次に、このような構成を有する測定装置100の動作について説明する。
センサー110は、バッテリ180から電力の供給が開始されると、上下加速度、左右加速度、および前後加速度を計測して電気信号として変換部120に出力する。センサー110から出力された電気信号は、変換部120で加速度データに変換され、逐次、記憶部130に保存される。
【0029】
一方、タイマ150は、バッテリ180から電力の供給が開始されると、制御部140に対して割込信号の送信を開始する。制御部140は、タイマ150から割込信号を受信すると、その度に、図6に示す「歩行機能判別処理」を実行する。以下、図6のフローチャートを参照して「歩行機能判別処理」について説明する。
【0030】
処理が開始されると、制御部140は、タイマ150から現在時刻を取得し、処理開始時刻保存キュー131に格納する(ステップS101)。処理開始時刻保存キュー131は記憶部130に確保されたFIFO(First In First Out)形式の記憶領域であり、図7に示す(a)のように、一度に2つの時刻(「今回処理開始時刻」と「前回処理開始時刻」)を蓄積できる。
【0031】
制御部140は、処理開始時刻保存キュー131から前回の割込処理で記録した処理開始時刻を取得する。そして、取得した時刻と、ステップS101で取得した処理開始時刻とを基に、前回の割込処理から今回の割込処理までに記憶部130に蓄積された加速度データ(以下、「未処理の加速度データ」という)特定する(ステップS102)。例えば、前回の割込処理で記録した時刻が“12時35分56秒78”(図7に示す(c))であり、今回の処理開始時刻が“12時36分56秒78”(図7に示す(b))であれば、“12時35分56秒79”から“12時36分56秒78”までの加速度データ(図7に示す(d))が「未処理の加速度データ」である。
【0032】
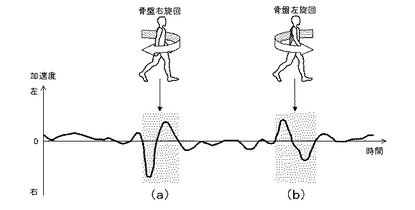
次に、制御部140は、特定した「未処理の加速度データ」を基に、未処理期間中に利用者の歩行が有ったか否かを判別する(ステップS103)。例えば、左右加速度は、図8に示す(a)、(b)のように、骨盤の旋回方向が変わるタイミング付近で正弦波状の波形を示すので、制御部140は、所定振幅以上の正弦波状の波形(以下、「S字波形」という)が一定数以上(例えば、定常歩行と判断される4個以上)現れる場合を“歩行あり”と判別する(ステップS103:Yes)。これに対して、S字波形が一定数未満の場合を“歩行なし”と判別する(ステップS103:No)。
【0033】
“歩行なし”と判別した場合(ステップS103:No)、制御部140は、図9に示すように、歩行中ではない旨を表示部160に表示し(ステップS104)、処理を終了する。一方、“歩行あり”と判別した場合(ステップS103:Yes)、ステップS105に処理を進める。
【0034】
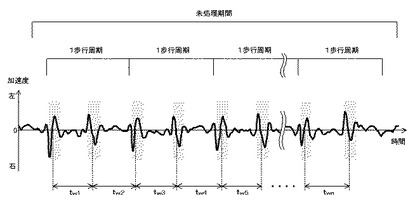
制御部140は、左右の加速度データを基に、1歩行周期あたりの平均時間Twcを算出する(ステップS105)。例えば、骨盤の旋回方向の変化は、図10に示すように、1歩行周期中に2回現れるので、制御部140は、旋回方向の変化を示す「S字波形」の間隔(tw1〜twn)をそれぞれ求め、それらを平均して2倍した値を1歩行周期あたりの平均時間Twcとして算出する(下記(式1))。
【0035】
【数1】

【0036】
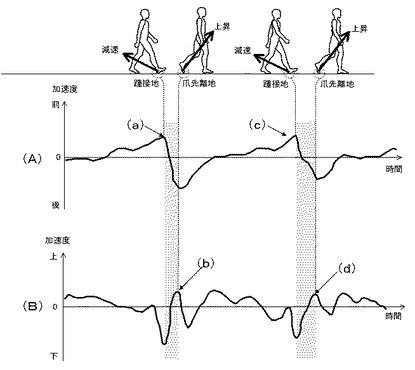
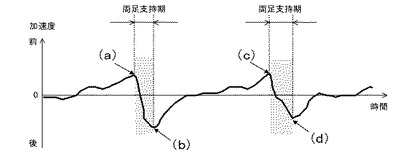
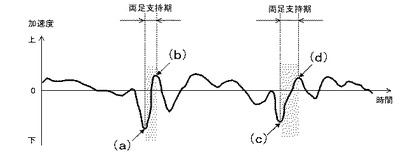
次に、制御部140は、両足支持期に要した時間、すなわち、一方の足の踵接地から他方の足の爪先離地までの時間を取得する(ステップS106)。例えば、歩行時の身体重心は、踵の接地によって減速するので、前後加速度は、図11(A)に示す(a)、(c)のように、「踵接地」時に前方向から後方向への変曲点(以下、「前後変曲点」という)を示す。また、歩行時の身体重心は、爪先で地面を蹴り上げることによって上昇するので、上下加速度は、図11(B)に示す(b)、(d)のように、「爪先離地」時に上方向から下方向への変曲点(以下、「上下変曲点」という)を示す。そこで、制御部140は、図12に示すように、前後加速度の「前後変曲点」から直後の上下加速度の「上下変曲点」までをそれぞれ両足支持期に要した時間(td1〜tdn)として取得する。
【0037】
次に、制御部140は、両足支持期に要した時間(td1〜tdn)から、1歩行周期あたりの両足接地時間Tdsを算出する(ステップS107)。例えば、両足支持期は1歩行周期中に2回現れるので、制御部140は、両足支持期に要した時間(td1〜tdn)を平均して2倍した値を1歩行周期あたりの両足接地時間Tdsとして算出する(下記(式2))。
【0038】
【数2】
【0039】
制御部140は、ステップS105で算出した1歩行周期あたりの平均時間Twc、および、ステップS107で算出した1歩行周期あたりの両足接地時間Tdsから、1歩行周期に占める両足接地時間の割合R(下記(式3))を算出する(ステップS108)。
【0040】
【数3】
【0041】
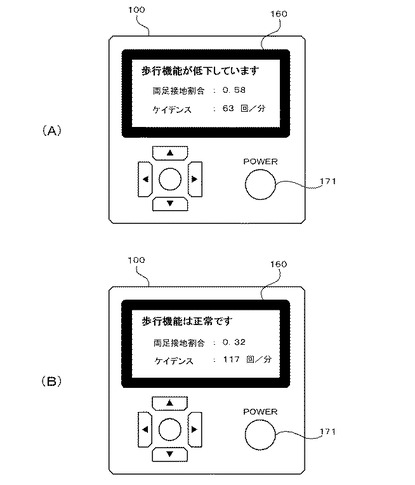
制御部140は、両足接地時間の割合Rが所定の閾値(例えば0.5)以下か否かを判別する(ステップS109)。割合Rが所定閾値を越えている場合(ステップS109:No)、図13(A)に示すように、歩行機能が低下している旨を表示部160に表示する。このとき、歩行機能の低下の程度が分かるように、両足接地時間の割合Rや、下記(式4)で算出されるケイデンスK(1分あたりの歩行周期の回数)も表示部160に表示する(ステップS110)。
【0042】
【数4】
【0043】
一方、割合Rが所定閾値以下の場合(ステップS109:Yes)、図13(B)に示すように、歩行機能が正常である旨を表示部160に表示する。ステップS110と同様に、両足接地時間の割合RやケイデンスKも表示部160に表示する(ステップS111)。
【0044】
表示部160への表示が完了したら、制御部140は、歩行機能判別処理を終了し、タイマ150から再び割込信号が送信されるのを待機する。タイマ150から割込信号を受信したら、制御部140は再びステップS101から歩行機能判別処理を実行する。
【0045】
本実施形態によれば、両足接地時間の割合Rを基に歩行機能の低下を判別しているので、利用者の運動量が少ない場合であっても、的確に歩行機能の低下を判別できる。
【0046】
また、判別結果に加え、両足接地時間の割合RやケイデンスKも表示部160に表示しているので、利用者は判別結果のみならず、歩行機能の低下の程度を数値として容易に確認できる。また、歩行機能の改善に向けてリハビリ等している患者も、歩行機能の改善の様子を数値として確認できるので、効率的な歩行訓練が可能になる。特に、無理なく歩けるケイデンスKは100〜130程度であると知られているので、ケイデンスKが100〜130の範囲に収まるように歩行訓練を重ねることで、早期の歩行機能の回復が可能になる。
【0047】
また、加速度を使用して両足接地時間を計測しているので、例えば、圧力センサーを爪先と踵に設置して両足接地時間を計測する場合等、他のセンシング情報を使って両足接地時間を計測するのとは違い、センサー110と制御部140とを一体の装置として提供できる。そのため、測定装置100を容易に人体に取り付けることが可能になるとともに、さまざまなセンサーを人体に取り付ける煩わしさから利用者を解放することができる。
【0048】
また、複数軸の加速度の計測結果を組み合わせて両足接地時間を測定しているので、1軸の加速度のみで両足接地時間を測定するのと比べ、高い測定精度を実現できる。特に、前後変曲点は踵接地と、上下変曲点は爪先離地と高い相関を示すので、前後加速度の計測結果と上下加速度の計測結果とを組み合わせることによって、より精度の高い両足接地時間の測定が可能になる。
【0049】
なお、本実施形態のS106では複数軸の加速度の計測結果を組み合わせて両足支持期に要する時間(すなわち、両足接地時間)を測定したが、1軸の加速度のみで両足接地時間を測定することも可能である。例えば、図14に示すように、上下加速度の上下変曲点(図14に示す(a)、(c))から直後の下方向から上方向への変曲点(図14に示す(b)、(d))までを両足支持期として両足接地時間を測定してもよいし、図15に示すように、前後加速度の前後変曲点(図15に示す(a)、(c))から直後の後方向から前方向への変曲点(図15に示す(b)、(d))までを両足支持期として両足接地時間を測定してもよい。また、図16に示すように、左右加速度のS字波形の最初の変曲点(図16に示す(a)または(c))から直後の変曲点(図16に示す(b)または(d))までを両足支持期として両足接地時間を測定してもよい。複数軸の加速度を計測可能な高価な加速度センサーを使用する必要がないので、測定装置100のコストを低減できる。
【0050】
また、両足接地時間は、歩行時に身体に加わる加速度の大きさを基に測定してもよい。例えば、歩行時のある時点における左右加速度alr(図17のベクトル(a))、前後加速度afb(図17のベクトル(b))、上下加速度aud(図17のベクトル(c))に対し、下記(式5)を適用することによってベクトル合成した、図17(d)に示す合成加速度Aを算出する。
【0051】
【数5】
【0052】
これを、ステップS102で特定した「未処理の加速度データ」の全データに適用する。そして、左右加速度、前後加速度、上下加速度に合成加速度を加えた、例えば、図18に示すような「加速度データ」を生成する。人体に加わる加速度は、地面を蹴り上げる際に最も大きくなるので、合成加速度は、「爪先離地」時に山なり(増加から減少)の変曲点を示す。そこで、制御部140は、前後加速度の前後変曲点と合成加速度の山なりの変曲点までを両足支持期として両足接地時間を測定する。人体に加わる加速度と爪先離地との間には高い相関があるので、これにより、より精度の高い両足接地時間の測定が可能になる。
【0053】
なお、変換部120は、図4(A)〜(C)に示すように、左方向、前方向、上方向をそれぞれプラス(正)方向としているが、右方向、後方向、下方向をそれぞれプラス(正)方向としてもよい。この場合、ステップS106で説明した「前後変曲点」は、図11(A)に示すような増加から減少に転じる点ではなく、減少から増加に転じる点となり、「上下変曲点」は、図11(B)に示すような増加から減少に転じる点ではなく、減少から増加に転じる点となる。また、ステップS103で説明した図8の「S字波形」は、それぞれ上下が逆転した波形となる。
【0054】
また、ステップS109で使用した、歩行機能の低下を判別するための閾値は、利用者の性別や体重等を基に決定してもよい。例えば、歩行者の年齢や性別を、図19に示すようなメニュー画面から入力できるようにしておき、制御部140は、歩行機能判別処理を実行する前に、利用者により入力された年齢・性別を記憶部130等から取得する。記憶部130は、あらかじめ「歩行者の年齢・性別」と、それらの者の標準的な「1歩行周期に占める両足接地時間の割合R」とを関連付けた情報を、図20に示すようなマトリクスとして記憶していて、制御部140は、そのマトリクスと歩行者の年齢・性別とを基に、ステップS109の実行前に、歩行機能の低下を判別するための閾値を設定する。例えば、75歳女性であれば、マトリクスから“0.37”(図20に示す(a))を取得し、それを閾値として設定する。頻繁に「歩行機が低下している」と判別されないようにするため、0.37に所定の値、例えば、1.3を乗じて“0.48”を閾値としてもよい。また、閾値を設定するための情報として、年齢や性別の他に、身長、体重、歩幅の情報を使用してもよい。これにより、歩行者の年齢や性別等に応じた、より精度の高い判別が可能になる。
【0055】
また、ステップS103では左右加速度の加速度データを使って歩行の有無を判別したが、例えば、上下加速度に現れる正弦波状の波形(図15)が、ステップS103と同様に、所定の回数以下か否かを判別することによって歩行の有無を判別してもよい。また、前後加速度に現れる鋸波状の波形(図14)が、ステップS103と同様に、所定の回数以下か否かを判別することによって歩行の有無を判別してもよい。
【0056】
また、ステップS103では加速度センサーからのセンサー情報を使って歩行の有無を判別したが、加速度センサー以外のセンサー情報を使って歩行の有無を判別してもよい。例えば、ジャイロセンサーを測定装置100に備えておき、ジャイロセンサーの検出する角速度により骨盤の旋回方向の変化を検出し(例えば、角速度の検出値がプラスからマイナスに変化するタイミング、またはプラスからマイナスに変化するタイミングを骨盤の旋回方向の変化として検出し)、その骨盤の旋回方向の変化が、ステップS103と同様に、所定の回数以下か否かを判別することによって歩行の有無を判別してもよい。また、磁気センサーを測定装置100に備えておき、磁気センサーの検出する歩行者の進行速度が、所定の歩行速度以下か否かを判別することによって歩行の有無を判別してもよい。加速度センサーから出力される信号レベルが小さい場合でも、確実に歩行の有無を判別できる。
【0057】
また、ステップS106では加速度センサーからのセンサー情報を基に両足接地時間を測定したが、圧力センサーからのセンサー情報を基に両足接地時間を測定してもよい。例えば、図21に示すように、パッド状の圧力センサー191〜194を両足の踵と爪先に取り付け、それらを信号線195、196で測定装置100と接続する。そして、制御部140は、左足踵の圧力センサー193が圧力を検知してから右足爪先の圧力センサー192が圧力を検知するまで、または、右足踵の圧力センサー191が圧力を検知してから左足爪先の圧力センサー194が圧力を検知するまでを両足支持期として両足接地時間を測定する。実験データを取得する場合等、精度の高い測定結果が必要なときに、容易に正確な両足接地時間の測定が可能になる。
【0058】
(実施形態2)
以上、実施形態1では、両足接地時間を測定し、その測定値を基に歩行機能の低下を判別したが、両足接地時間を使用せずに歩行機能の低下を判別することも可能である。以下、一例として、歩行者の身体に加わる加速度の大きさを基に、歩行機能の低下を判別する装置について説明する。なお、本実施形態の測定装置100の構成は、図3に示す実施形態1の測定装置100の構成と同一であるので、説明を省略する。以下、測定装置100の動作について説明する。
【0059】
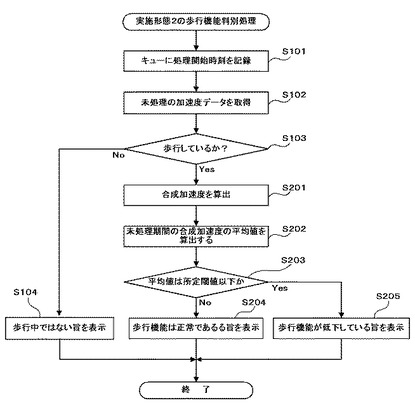
センサー110は、バッテリ180から電力の供給が開始されると、上下加速度、左右加速度、および前後加速度を計測して電気信号として変換部120に出力する。センサー110から出力された電気信号は、変換部120で加速度データに変換され、逐次、記憶部130に保存される。また、タイマ150は、バッテリ180から電力の供給が開始されると、制御部140に対して割込信号の送信を開始する。制御部140は、タイマ150から割込信号を受信すると、その度に、図22に示す「歩行機能判別処理」を実行する。以下、図22のフローチャートを参照して「歩行機能判別処理」について説明する。なお、図22に示すステップS101〜S104は、図6に示す実施形態1のステップS101〜S104と同一であるので、説明を省略する。以下、ステップS201から説明を開始する。
【0060】
制御部140は、ステップS102で特定した「未処理の加速度データ」の全データに対し、上述の(式5)を適用して、それぞれ合成加速度を算出する。そして、図7に示す加速度データに、上記で算出した合成加速度を加えた、例えば、図18に示すような「加速度データ」を生成する(ステップS201)。
【0061】
次に、制御部140は、ステップS201で算出した複数の合成加速度の平均値を算出する(ステップS202)。そして、制御部140は、その算出した平均値が所定の閾値以下か否かを判別する(ステップS203)。平均値が所定の閾値を越えている場合(ステップS203:No)、歩行機能が正常である旨を表示部160に表示する(ステップS204)。これに対して、平均値が所定の閾値以下の場合(ステップS203:Yes)、歩行機能が低下している旨を表示部160に表示する(ステップS205)。表示が完了したら、制御部140は、歩行機能判別処理を終了する。
【0062】
歩行機能が低下すると、地面を蹴り上げる力が弱くなり、身体に加わる加速度が小さくなるので、合成加速度を使用して歩行機能の低下を判別することによって、より精度の高い判別が可能になる。
【0063】
また、加速度センサーの3軸の計測軸方向と、歩行者の左右方向、前後方向、上下方向とを合致させる必要がなくなるので、利用者はより容易に測定装置100を人体に取り付けることが可能になる。
【0064】
なお、実施形態1および2の測定装置100は、専用のシステムによらず、通常のコンピュータシステムを用いても実現可能である。例えば、上述の動作を実行するためのプログラムをコンピュータ読み取り可能な記録媒体に格納して配布し、該プログラムをコンピュータにインストールして、上述の処理を実行することによって測定装置100を構成してもよい。また、インターネット等のネットワーク上のサーバ装置が備えるディスク装置に格納しておき、例えばコンピュータにダウンロード等できるようにしてもよい。また、上述の機能を、OSとアプリケーションソフトとの共同により実現してもよい。この場合には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータにダウンロード等してもよい。
【0065】
上記プログラムを記録する記録媒体としては、USBメモリ、フレキシブルディスク、CD、DVD、Blu−ray Disc(登録商標)、MO、SDカード、メモリースティック(登録商標)、その他、磁気ディスク、光ディスク、光磁気ディスク、半導体メモリ、磁気テープ等のコンピュータ読取可能な記録媒体を使用することができる。また、HDD(ハードディスク)やSSD(ソリッドステートドライブ)等、通常、システム又は装置に固定して使用する記録媒体を使用することもできる。
【符号の説明】
【0066】
100 測定装置
110 センサー
120 変換部
130 記憶部
131 処理開始時刻保存キュー
140 制御部
150 タイマ
160 表示部
170 操作部
171 電源スイッチ
180 バッテリ
191〜194 圧力センサー
195、196 信号線
200 ベルト
【技術分野】
【0001】
本発明は、測定装置、測定方法、及び、測定プログラムに関する。
【背景技術】
【0002】
大腿骨頚部を骨折して歩けなくなった高齢者の5年生存率は50%である。歩行機能の低下は高齢者の寿命に大きな影響を与える。特許文献1には、歩数センサーで計測した歩数情報を基に、歩行距離や消費カロリー等の健康管理指標を表示する歩数計が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−258042号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1の歩数計は歩行距離等の運動量の大小を指標としているために、例えば、冬場の寒さのために一日中家から出ない場合等、運動量がもともと少ない場合は、歩行機能の低下を的確に評価できないという問題がある。
【0005】
本発明はこのような問題に鑑みてなされたものであり、歩行機能の低下を的確に評価するための情報を取得する測定装置、測定方法、及び、測定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の第1の観点にかかる測定装置は、
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得手段と、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を測定する両足接地時間測定手段と、を備える、
ことを特徴とする。
【0007】
前記センサー出力取得手段は、
2以上の方向の加速度の計測出力をそれぞれ取得する手段、を備え、
前記両足接地時間測定手段は、
2以上の方向の加速度を基に両足接地時間を測定する手段、を備えていてもよい。
【0008】
前記センサー出力取得手段は、
進行方向への加速度である前後加速度の計測出力を取得する手段と、
鉛直方向への加速度である上下加速度の計測出力を取得する手段と、を備え、
前記両足接地時間測定手段は、
前記前後加速度が増加から減少もしくは減少から増加に転じるタイミングを基に踵接地時を判別する手段と、
前記上下加速度が増加から減少もしくは減少から増加に転じるタイミングを基に爪先離地時を判別する手段と、
踵接地から踵接地直後の爪先離地までに要した時間を測定する手段と、を備えていてもよい。
【0009】
前記センサー出力取得手段は、
進行方向への加速度である前後加速度の計測出力を取得する手段、を備え、
前記両足接地時間測定手段は、
2以上の方向の加速度をベクトル合成して合成加速度を取得する手段と、
前記前後加速度が増加から減少もしくは減少から増加に転じるタイミングを基に踵接地時を判別する手段と、
前記合成加速度が増加から減少に転じるタイミングを基に爪先離地時を判別する手段と、
踵接地から踵接地直後の爪先離地までに要した時間を測定する手段と、備えていてもよい。
【0010】
1歩行周期にかかる時間を取得する1歩行周期時間取得手段と、
1歩行周期にかかる時間と1歩行周期あたりの両足接地時間とを基に、1歩行周期に占める両足接地時間の割合を算出する算出手段と、
両足接地時間の割合が所定の閾値以上であるか否かを判別する判別手段と、を備えていてもよい。
【0011】
前記センサー出力取得手段は、
左右方向への加速度である左右加速度の計測出力を取得する手段、を備え、
1歩行周期時間取得手段は、
前記左右加速度の計測出力を基に、1歩行周期にかかる時間を取得する手段、を備えていてもよい。
【0012】
歩行者の年齢、性別、身長、体重、または歩幅の情報を入力する情報入力手段と、
前記情報入力手段に入力された情報を基に、前記閾値を取得する閾値取得手段と、を備えていてもよい。
【0013】
上記目的を達成するため、本発明の第2の観点にかかる測定方法は、
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得ステップと、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を取得する両足接地時間取得ステップと、を有する、
ことを特徴とする。
【0014】
上記目的を達成するため、本発明の第3の観点にかかる測定プログラムは、
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得ステップと、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を取得する両足接地時間取得ステップと、をコンピュータに実行させる、
ことを特徴とする。
【発明の効果】
【0015】
歩行機能の低下を的確に評価するための情報を取得する測定装置、測定方法、及び、測定プログラムを提供できる。
【図面の簡単な説明】
【0016】
【図1】実施形態1に係る測定装置を人に取り付けた様子を示す図であり、(A)は測定装置を取り付けた人を背面から見た図であり、(B)は測定装置を取り付けた人を右側面から見た図である。
【図2】歩行周期および両足接地時間を説明するための図である。
【図3】実施形態1および2に係る測定装置の構成を示すブロック図である。
【図4】測定装置のセンサーから出力される電気信号からノイズを除去して生成される加速度信号を示す図であり、(A)は左右加速度を示す加速度信号、(B)は前後加速度を示す加速度信号、(C)は上下加速度を示す加速度信号である。
【図5】加速度信号を所定周期でサンプリングすることによって生成されるデジタルデータ(加速度データ)を示す図である。
【図6】実施形態1に係る歩行機能判別処理を説明するためのフローチャートである。
【図7】歩行機能判別処理の開始時刻を保存するための処理開始時刻保存キューと、記憶部に保存された加速度データとを示す図である。
【図8】骨盤の旋回方向が変わるタイミング付近で左右加速度に現れるS字波形を説明するための図である。
【図9】利用者が歩行中ではないと判別した際に、測定装置の表示部に表示される、歩行中ではない旨が表示を示す図である。
【図10】骨盤の旋回方向の変化を示すS字波形が1歩行周期中に2回現れる様子を示す図である。
【図11】前後加速度および上下加速度から「踵接地」時および「爪先離地」時を判別する様子を説明するための図であり、(A)は前後加速度が「踵接地」時に前方向から後方向への変曲点を示すことを説明するための図であり、(B)は上下加速度が「爪先離地」時に上方向から下方向への変曲点を示すことを説明するための図である。
【図12】前後加速度の「前後変曲点」から上下加速度の「上下変曲点」までをそれぞれ両足支持期に要した時間として、1歩行周期に占める両足接地時間を算出する様子を示す図である。
【図13】表示部に表示された判別結果を示す図であり、(A)は利用者の歩行機能が低下している旨を表示した様子を示す図であり、(B)は利用者の歩行機能が正常である旨を表示した様子を示す図である。
【図14】上下加速度の上下変曲点から次の下方向から上方向への変曲点までを両足支持期と判別する様子を示す図である。
【図15】前後加速度の前後変曲点から次の後方向から前方向への変曲点までを両足支持期と判別する様子を示す図である。
【図16】左右加速度のS字波形の最初の変曲点から次の変曲点までを両足支持期と判別する様子を示す図である。
【図17】歩行時のある時点における左右加速度の大きさと方向を示すベクトル(a)と、前後加速度の大きさと方向を示すベクトル(b)と、上下加速度の大きさと方向を示すベクトル(c)とをベクトル合成して生成される合成加速度(d)を説明するための図である。
【図18】図5に示す加速度データの各データに対し、合成加速度のデータを加えた図である。
【図19】測定装置に歩行者の年齢や性別を設定するためのメニュー画面を示す図である。
【図20】歩行者の年齢や性別の情報を基に、歩行機能の低下を判別するための閾値を設定するための閾値設定用マトリクスを説明するための図である。
【図21】圧力センサーを両足の踵と爪先に取り付け、それらを信号線で測定装置の本体と接続した様子を示す図である。
【図22】実施形態2に係る歩行機能判別処理を説明するためのフローチャートである。
【発明を実施するための形態】
【0017】
(実施形態1)
本実施形態の測定装置100は、人体に加わる加速度を加速度センサーで計測し、その計測値を基に両足接地時間を測定するための装置である。また、測定装置100は、測定した両足接地時間を基に、利用者の歩行機能が低下しているか否かを判別するための装置である。この測定装置100は、例えば、身体重心がある第3腰椎付近(例えば、図1に示すように、ベルト200の腰背部中央付近)に取り付けて使用される。
【0018】
なお、本実施形態では、歩行周期に占める両足接地時間の割合を基に、歩行機能の低下を判別する。これは、高齢や障害等により脚力や関節機能等が低下すると、片脚でバランスをとるのが困難になり、おのずと歩行中の両足接地時間が長くなることに着目したものである。なお、「歩行周期」とは、人の歩行サイクルのことであり、例えば、図2に示すように、右足(または左足)の踵が接地してから次に右足(または左足)の踵が接地するまでの期間のことをいう。また、「両足接地時間」とは、歩行中の両足支持期(ダブルサポート)に要する時間のことであり、例えば、右足の「踵接地」から直後の左足の「爪先離地」までの時間(図2に示す(a))、および、左足の「踵接地」から直後の右足の「爪先離地」までの時間(図2に示す(b))ことをいう。
【0019】
以下、測定装置100の構成について、図面を参照しながら説明する。測定装置100は、図3に示すように、センサー110と、変換部120と、記憶部130と、制御部140と、タイマ150と、表示部160と、操作部170と、バッテリ180から構成される。
【0020】
センサー110は、MEMS(Micro Electro Mechanical Systems)センサー等の3軸加速度センサーであり、歩行時の進行方向、左右方向、および鉛直方向への加速度を計測する。なお、以下の説明では、進行方向への加速度を「前後加速度」、左右方向への加速度を「左右加速度」、鉛直方向への加速度を「上下加速度」と呼ぶ。計測された加速度は、順次、変換部120に出力される。
【0021】
変換部120は、ノイズ除去用のフィルタやA/D(Analog/Digital)コンバータ等から構成され、センサー110から出力された電気信号からノイズを除去して図4(A)〜(C)に示すような「加速度信号」を生成する。また、変換部120は、加速度信号を所定周期でサンプリングして、図5に示すような「加速度データ」を生成する。変換部120は、生成した加速度データを、順次、記憶部130に格納する。
【0022】
記憶部130は、RAM(Random Access Memory)等の記憶装置から構成され、プログラムや加速度データ等の各種データを記憶する。
【0023】
制御部140は、CPU(Central Processing Unit)等のプロセッサから構成され、記憶部130に格納されているプログラムに従って動作し、後述の「歩行機能判別処理」を含む種々の動作を実行する。
【0024】
タイマ150は、水晶発振子等の計時装置から構成され、現在時刻を計時して変換部120および制御部140に送信する。また、タイマ150は、制御部140に対し、所定時間毎に(例えば1分毎に)、歩行機能判別処理の開始トリガとなる「割込信号」を送信する。
【0025】
表示部160は、液晶パネル等の表示装置から構成され、制御部140の制御に従って判別結果等の各種情報を表示する。
【0026】
操作部170は、各種操作用のスイッチから構成され、その中には、測定装置100の駆動を開始するための電源スイッチ171が含まれる。
【0027】
バッテリ180は、リチウムイオン電池等の蓄電装置から構成され、利用者等により電源スイッチ171が押されると、各部に電力の供給を開始する。
【0028】
次に、このような構成を有する測定装置100の動作について説明する。
センサー110は、バッテリ180から電力の供給が開始されると、上下加速度、左右加速度、および前後加速度を計測して電気信号として変換部120に出力する。センサー110から出力された電気信号は、変換部120で加速度データに変換され、逐次、記憶部130に保存される。
【0029】
一方、タイマ150は、バッテリ180から電力の供給が開始されると、制御部140に対して割込信号の送信を開始する。制御部140は、タイマ150から割込信号を受信すると、その度に、図6に示す「歩行機能判別処理」を実行する。以下、図6のフローチャートを参照して「歩行機能判別処理」について説明する。
【0030】
処理が開始されると、制御部140は、タイマ150から現在時刻を取得し、処理開始時刻保存キュー131に格納する(ステップS101)。処理開始時刻保存キュー131は記憶部130に確保されたFIFO(First In First Out)形式の記憶領域であり、図7に示す(a)のように、一度に2つの時刻(「今回処理開始時刻」と「前回処理開始時刻」)を蓄積できる。
【0031】
制御部140は、処理開始時刻保存キュー131から前回の割込処理で記録した処理開始時刻を取得する。そして、取得した時刻と、ステップS101で取得した処理開始時刻とを基に、前回の割込処理から今回の割込処理までに記憶部130に蓄積された加速度データ(以下、「未処理の加速度データ」という)特定する(ステップS102)。例えば、前回の割込処理で記録した時刻が“12時35分56秒78”(図7に示す(c))であり、今回の処理開始時刻が“12時36分56秒78”(図7に示す(b))であれば、“12時35分56秒79”から“12時36分56秒78”までの加速度データ(図7に示す(d))が「未処理の加速度データ」である。
【0032】
次に、制御部140は、特定した「未処理の加速度データ」を基に、未処理期間中に利用者の歩行が有ったか否かを判別する(ステップS103)。例えば、左右加速度は、図8に示す(a)、(b)のように、骨盤の旋回方向が変わるタイミング付近で正弦波状の波形を示すので、制御部140は、所定振幅以上の正弦波状の波形(以下、「S字波形」という)が一定数以上(例えば、定常歩行と判断される4個以上)現れる場合を“歩行あり”と判別する(ステップS103:Yes)。これに対して、S字波形が一定数未満の場合を“歩行なし”と判別する(ステップS103:No)。
【0033】
“歩行なし”と判別した場合(ステップS103:No)、制御部140は、図9に示すように、歩行中ではない旨を表示部160に表示し(ステップS104)、処理を終了する。一方、“歩行あり”と判別した場合(ステップS103:Yes)、ステップS105に処理を進める。
【0034】
制御部140は、左右の加速度データを基に、1歩行周期あたりの平均時間Twcを算出する(ステップS105)。例えば、骨盤の旋回方向の変化は、図10に示すように、1歩行周期中に2回現れるので、制御部140は、旋回方向の変化を示す「S字波形」の間隔(tw1〜twn)をそれぞれ求め、それらを平均して2倍した値を1歩行周期あたりの平均時間Twcとして算出する(下記(式1))。
【0035】
【数1】
【0036】
次に、制御部140は、両足支持期に要した時間、すなわち、一方の足の踵接地から他方の足の爪先離地までの時間を取得する(ステップS106)。例えば、歩行時の身体重心は、踵の接地によって減速するので、前後加速度は、図11(A)に示す(a)、(c)のように、「踵接地」時に前方向から後方向への変曲点(以下、「前後変曲点」という)を示す。また、歩行時の身体重心は、爪先で地面を蹴り上げることによって上昇するので、上下加速度は、図11(B)に示す(b)、(d)のように、「爪先離地」時に上方向から下方向への変曲点(以下、「上下変曲点」という)を示す。そこで、制御部140は、図12に示すように、前後加速度の「前後変曲点」から直後の上下加速度の「上下変曲点」までをそれぞれ両足支持期に要した時間(td1〜tdn)として取得する。
【0037】
次に、制御部140は、両足支持期に要した時間(td1〜tdn)から、1歩行周期あたりの両足接地時間Tdsを算出する(ステップS107)。例えば、両足支持期は1歩行周期中に2回現れるので、制御部140は、両足支持期に要した時間(td1〜tdn)を平均して2倍した値を1歩行周期あたりの両足接地時間Tdsとして算出する(下記(式2))。
【0038】
【数2】
【0039】
制御部140は、ステップS105で算出した1歩行周期あたりの平均時間Twc、および、ステップS107で算出した1歩行周期あたりの両足接地時間Tdsから、1歩行周期に占める両足接地時間の割合R(下記(式3))を算出する(ステップS108)。
【0040】
【数3】
【0041】
制御部140は、両足接地時間の割合Rが所定の閾値(例えば0.5)以下か否かを判別する(ステップS109)。割合Rが所定閾値を越えている場合(ステップS109:No)、図13(A)に示すように、歩行機能が低下している旨を表示部160に表示する。このとき、歩行機能の低下の程度が分かるように、両足接地時間の割合Rや、下記(式4)で算出されるケイデンスK(1分あたりの歩行周期の回数)も表示部160に表示する(ステップS110)。
【0042】
【数4】
【0043】
一方、割合Rが所定閾値以下の場合(ステップS109:Yes)、図13(B)に示すように、歩行機能が正常である旨を表示部160に表示する。ステップS110と同様に、両足接地時間の割合RやケイデンスKも表示部160に表示する(ステップS111)。
【0044】
表示部160への表示が完了したら、制御部140は、歩行機能判別処理を終了し、タイマ150から再び割込信号が送信されるのを待機する。タイマ150から割込信号を受信したら、制御部140は再びステップS101から歩行機能判別処理を実行する。
【0045】
本実施形態によれば、両足接地時間の割合Rを基に歩行機能の低下を判別しているので、利用者の運動量が少ない場合であっても、的確に歩行機能の低下を判別できる。
【0046】
また、判別結果に加え、両足接地時間の割合RやケイデンスKも表示部160に表示しているので、利用者は判別結果のみならず、歩行機能の低下の程度を数値として容易に確認できる。また、歩行機能の改善に向けてリハビリ等している患者も、歩行機能の改善の様子を数値として確認できるので、効率的な歩行訓練が可能になる。特に、無理なく歩けるケイデンスKは100〜130程度であると知られているので、ケイデンスKが100〜130の範囲に収まるように歩行訓練を重ねることで、早期の歩行機能の回復が可能になる。
【0047】
また、加速度を使用して両足接地時間を計測しているので、例えば、圧力センサーを爪先と踵に設置して両足接地時間を計測する場合等、他のセンシング情報を使って両足接地時間を計測するのとは違い、センサー110と制御部140とを一体の装置として提供できる。そのため、測定装置100を容易に人体に取り付けることが可能になるとともに、さまざまなセンサーを人体に取り付ける煩わしさから利用者を解放することができる。
【0048】
また、複数軸の加速度の計測結果を組み合わせて両足接地時間を測定しているので、1軸の加速度のみで両足接地時間を測定するのと比べ、高い測定精度を実現できる。特に、前後変曲点は踵接地と、上下変曲点は爪先離地と高い相関を示すので、前後加速度の計測結果と上下加速度の計測結果とを組み合わせることによって、より精度の高い両足接地時間の測定が可能になる。
【0049】
なお、本実施形態のS106では複数軸の加速度の計測結果を組み合わせて両足支持期に要する時間(すなわち、両足接地時間)を測定したが、1軸の加速度のみで両足接地時間を測定することも可能である。例えば、図14に示すように、上下加速度の上下変曲点(図14に示す(a)、(c))から直後の下方向から上方向への変曲点(図14に示す(b)、(d))までを両足支持期として両足接地時間を測定してもよいし、図15に示すように、前後加速度の前後変曲点(図15に示す(a)、(c))から直後の後方向から前方向への変曲点(図15に示す(b)、(d))までを両足支持期として両足接地時間を測定してもよい。また、図16に示すように、左右加速度のS字波形の最初の変曲点(図16に示す(a)または(c))から直後の変曲点(図16に示す(b)または(d))までを両足支持期として両足接地時間を測定してもよい。複数軸の加速度を計測可能な高価な加速度センサーを使用する必要がないので、測定装置100のコストを低減できる。
【0050】
また、両足接地時間は、歩行時に身体に加わる加速度の大きさを基に測定してもよい。例えば、歩行時のある時点における左右加速度alr(図17のベクトル(a))、前後加速度afb(図17のベクトル(b))、上下加速度aud(図17のベクトル(c))に対し、下記(式5)を適用することによってベクトル合成した、図17(d)に示す合成加速度Aを算出する。
【0051】
【数5】
【0052】
これを、ステップS102で特定した「未処理の加速度データ」の全データに適用する。そして、左右加速度、前後加速度、上下加速度に合成加速度を加えた、例えば、図18に示すような「加速度データ」を生成する。人体に加わる加速度は、地面を蹴り上げる際に最も大きくなるので、合成加速度は、「爪先離地」時に山なり(増加から減少)の変曲点を示す。そこで、制御部140は、前後加速度の前後変曲点と合成加速度の山なりの変曲点までを両足支持期として両足接地時間を測定する。人体に加わる加速度と爪先離地との間には高い相関があるので、これにより、より精度の高い両足接地時間の測定が可能になる。
【0053】
なお、変換部120は、図4(A)〜(C)に示すように、左方向、前方向、上方向をそれぞれプラス(正)方向としているが、右方向、後方向、下方向をそれぞれプラス(正)方向としてもよい。この場合、ステップS106で説明した「前後変曲点」は、図11(A)に示すような増加から減少に転じる点ではなく、減少から増加に転じる点となり、「上下変曲点」は、図11(B)に示すような増加から減少に転じる点ではなく、減少から増加に転じる点となる。また、ステップS103で説明した図8の「S字波形」は、それぞれ上下が逆転した波形となる。
【0054】
また、ステップS109で使用した、歩行機能の低下を判別するための閾値は、利用者の性別や体重等を基に決定してもよい。例えば、歩行者の年齢や性別を、図19に示すようなメニュー画面から入力できるようにしておき、制御部140は、歩行機能判別処理を実行する前に、利用者により入力された年齢・性別を記憶部130等から取得する。記憶部130は、あらかじめ「歩行者の年齢・性別」と、それらの者の標準的な「1歩行周期に占める両足接地時間の割合R」とを関連付けた情報を、図20に示すようなマトリクスとして記憶していて、制御部140は、そのマトリクスと歩行者の年齢・性別とを基に、ステップS109の実行前に、歩行機能の低下を判別するための閾値を設定する。例えば、75歳女性であれば、マトリクスから“0.37”(図20に示す(a))を取得し、それを閾値として設定する。頻繁に「歩行機が低下している」と判別されないようにするため、0.37に所定の値、例えば、1.3を乗じて“0.48”を閾値としてもよい。また、閾値を設定するための情報として、年齢や性別の他に、身長、体重、歩幅の情報を使用してもよい。これにより、歩行者の年齢や性別等に応じた、より精度の高い判別が可能になる。
【0055】
また、ステップS103では左右加速度の加速度データを使って歩行の有無を判別したが、例えば、上下加速度に現れる正弦波状の波形(図15)が、ステップS103と同様に、所定の回数以下か否かを判別することによって歩行の有無を判別してもよい。また、前後加速度に現れる鋸波状の波形(図14)が、ステップS103と同様に、所定の回数以下か否かを判別することによって歩行の有無を判別してもよい。
【0056】
また、ステップS103では加速度センサーからのセンサー情報を使って歩行の有無を判別したが、加速度センサー以外のセンサー情報を使って歩行の有無を判別してもよい。例えば、ジャイロセンサーを測定装置100に備えておき、ジャイロセンサーの検出する角速度により骨盤の旋回方向の変化を検出し(例えば、角速度の検出値がプラスからマイナスに変化するタイミング、またはプラスからマイナスに変化するタイミングを骨盤の旋回方向の変化として検出し)、その骨盤の旋回方向の変化が、ステップS103と同様に、所定の回数以下か否かを判別することによって歩行の有無を判別してもよい。また、磁気センサーを測定装置100に備えておき、磁気センサーの検出する歩行者の進行速度が、所定の歩行速度以下か否かを判別することによって歩行の有無を判別してもよい。加速度センサーから出力される信号レベルが小さい場合でも、確実に歩行の有無を判別できる。
【0057】
また、ステップS106では加速度センサーからのセンサー情報を基に両足接地時間を測定したが、圧力センサーからのセンサー情報を基に両足接地時間を測定してもよい。例えば、図21に示すように、パッド状の圧力センサー191〜194を両足の踵と爪先に取り付け、それらを信号線195、196で測定装置100と接続する。そして、制御部140は、左足踵の圧力センサー193が圧力を検知してから右足爪先の圧力センサー192が圧力を検知するまで、または、右足踵の圧力センサー191が圧力を検知してから左足爪先の圧力センサー194が圧力を検知するまでを両足支持期として両足接地時間を測定する。実験データを取得する場合等、精度の高い測定結果が必要なときに、容易に正確な両足接地時間の測定が可能になる。
【0058】
(実施形態2)
以上、実施形態1では、両足接地時間を測定し、その測定値を基に歩行機能の低下を判別したが、両足接地時間を使用せずに歩行機能の低下を判別することも可能である。以下、一例として、歩行者の身体に加わる加速度の大きさを基に、歩行機能の低下を判別する装置について説明する。なお、本実施形態の測定装置100の構成は、図3に示す実施形態1の測定装置100の構成と同一であるので、説明を省略する。以下、測定装置100の動作について説明する。
【0059】
センサー110は、バッテリ180から電力の供給が開始されると、上下加速度、左右加速度、および前後加速度を計測して電気信号として変換部120に出力する。センサー110から出力された電気信号は、変換部120で加速度データに変換され、逐次、記憶部130に保存される。また、タイマ150は、バッテリ180から電力の供給が開始されると、制御部140に対して割込信号の送信を開始する。制御部140は、タイマ150から割込信号を受信すると、その度に、図22に示す「歩行機能判別処理」を実行する。以下、図22のフローチャートを参照して「歩行機能判別処理」について説明する。なお、図22に示すステップS101〜S104は、図6に示す実施形態1のステップS101〜S104と同一であるので、説明を省略する。以下、ステップS201から説明を開始する。
【0060】
制御部140は、ステップS102で特定した「未処理の加速度データ」の全データに対し、上述の(式5)を適用して、それぞれ合成加速度を算出する。そして、図7に示す加速度データに、上記で算出した合成加速度を加えた、例えば、図18に示すような「加速度データ」を生成する(ステップS201)。
【0061】
次に、制御部140は、ステップS201で算出した複数の合成加速度の平均値を算出する(ステップS202)。そして、制御部140は、その算出した平均値が所定の閾値以下か否かを判別する(ステップS203)。平均値が所定の閾値を越えている場合(ステップS203:No)、歩行機能が正常である旨を表示部160に表示する(ステップS204)。これに対して、平均値が所定の閾値以下の場合(ステップS203:Yes)、歩行機能が低下している旨を表示部160に表示する(ステップS205)。表示が完了したら、制御部140は、歩行機能判別処理を終了する。
【0062】
歩行機能が低下すると、地面を蹴り上げる力が弱くなり、身体に加わる加速度が小さくなるので、合成加速度を使用して歩行機能の低下を判別することによって、より精度の高い判別が可能になる。
【0063】
また、加速度センサーの3軸の計測軸方向と、歩行者の左右方向、前後方向、上下方向とを合致させる必要がなくなるので、利用者はより容易に測定装置100を人体に取り付けることが可能になる。
【0064】
なお、実施形態1および2の測定装置100は、専用のシステムによらず、通常のコンピュータシステムを用いても実現可能である。例えば、上述の動作を実行するためのプログラムをコンピュータ読み取り可能な記録媒体に格納して配布し、該プログラムをコンピュータにインストールして、上述の処理を実行することによって測定装置100を構成してもよい。また、インターネット等のネットワーク上のサーバ装置が備えるディスク装置に格納しておき、例えばコンピュータにダウンロード等できるようにしてもよい。また、上述の機能を、OSとアプリケーションソフトとの共同により実現してもよい。この場合には、OS以外の部分のみを媒体に格納して配布してもよく、また、コンピュータにダウンロード等してもよい。
【0065】
上記プログラムを記録する記録媒体としては、USBメモリ、フレキシブルディスク、CD、DVD、Blu−ray Disc(登録商標)、MO、SDカード、メモリースティック(登録商標)、その他、磁気ディスク、光ディスク、光磁気ディスク、半導体メモリ、磁気テープ等のコンピュータ読取可能な記録媒体を使用することができる。また、HDD(ハードディスク)やSSD(ソリッドステートドライブ)等、通常、システム又は装置に固定して使用する記録媒体を使用することもできる。
【符号の説明】
【0066】
100 測定装置
110 センサー
120 変換部
130 記憶部
131 処理開始時刻保存キュー
140 制御部
150 タイマ
160 表示部
170 操作部
171 電源スイッチ
180 バッテリ
191〜194 圧力センサー
195、196 信号線
200 ベルト
【特許請求の範囲】
【請求項1】
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得手段と、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する両足接地時間を測定する両足接地時間測定手段と、を備える、
ことを特徴とする測定装置。
【請求項2】
前記センサー出力取得手段は、
2以上の方向の加速度の計測出力をそれぞれ取得する手段、を備え、
前記両足接地時間測定手段は、
2以上の方向の加速度を基に両足接地時間を測定する手段、を備える、
ことを特徴とする請求項1に記載の測定装置。
【請求項3】
前記センサー出力取得手段は、
進行方向への加速度である前後加速度の計測出力を取得する手段と、
鉛直方向への加速度である上下加速度の計測出力を取得する手段と、を備え、
前記両足接地時間測定手段は、
前記前後加速度が増加から減少もしくは減少から増加に転じるタイミングを基に踵接地時を判別する手段と、
前記上下加速度が増加から減少もしくは減少から増加に転じるタイミングを基に爪先離地時を判別する手段と、
踵接地から踵接地直後の爪先離地までに要した時間を測定する手段と、を備える、
ことを特徴とする請求項2に記載の測定装置。
【請求項4】
前記センサー出力取得手段は、
進行方向への加速度である前後加速度の計測出力を取得する手段、を備え、
前記両足接地時間測定手段は、
2以上の方向の加速度をベクトル合成して合成加速度を取得する手段と、
前記前後加速度が増加から減少もしくは減少から増加に転じるタイミングを基に踵接地時を判別する手段と、
前記合成加速度が増加から減少に転じるタイミングを基に爪先離地時を判別する手段と、
踵接地から踵接地直後の爪先離地までに要した時間を測定する手段と、備える、
ことを特徴とする請求項2に記載の測定装置。
【請求項5】
1歩行周期にかかる時間を取得する1歩行周期時間取得手段と、
1歩行周期にかかる時間と1歩行周期あたりの両足接地時間とを基に、1歩行周期に占める両足接地時間の割合を算出する算出手段と、
両足接地時間の割合が所定の閾値以上であるか否かを判別する判別手段と、を備える、
ことを特徴とする請求項1乃至4のいずれか1項に記載の測定装置。
【請求項6】
前記センサー出力取得手段は、
左右方向への加速度である左右加速度の計測出力を取得する手段、を備え、
1歩行周期時間取得手段は、
前記左右加速度の計測出力を基に、1歩行周期にかかる時間を取得する手段、を備える、
ことを特徴とする請求項5に記載の測定装置。
【請求項7】
歩行者の年齢、性別、身長、体重、または歩幅の情報を入力する情報入力手段と、
前記情報入力手段に入力された情報を基に、前記閾値を取得する閾値取得手段と、を備える、
ことを特徴とする請求項5または6に記載の測定装置。
【請求項8】
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得ステップと、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を取得する両足接地時間取得ステップと、を有する、
ことを特徴とする測定方法。
【請求項9】
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得ステップと、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を取得する両足接地時間取得ステップと、をコンピュータに実行させる、
ことを特徴とする測定プログラム。
【請求項1】
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得手段と、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する両足接地時間を測定する両足接地時間測定手段と、を備える、
ことを特徴とする測定装置。
【請求項2】
前記センサー出力取得手段は、
2以上の方向の加速度の計測出力をそれぞれ取得する手段、を備え、
前記両足接地時間測定手段は、
2以上の方向の加速度を基に両足接地時間を測定する手段、を備える、
ことを特徴とする請求項1に記載の測定装置。
【請求項3】
前記センサー出力取得手段は、
進行方向への加速度である前後加速度の計測出力を取得する手段と、
鉛直方向への加速度である上下加速度の計測出力を取得する手段と、を備え、
前記両足接地時間測定手段は、
前記前後加速度が増加から減少もしくは減少から増加に転じるタイミングを基に踵接地時を判別する手段と、
前記上下加速度が増加から減少もしくは減少から増加に転じるタイミングを基に爪先離地時を判別する手段と、
踵接地から踵接地直後の爪先離地までに要した時間を測定する手段と、を備える、
ことを特徴とする請求項2に記載の測定装置。
【請求項4】
前記センサー出力取得手段は、
進行方向への加速度である前後加速度の計測出力を取得する手段、を備え、
前記両足接地時間測定手段は、
2以上の方向の加速度をベクトル合成して合成加速度を取得する手段と、
前記前後加速度が増加から減少もしくは減少から増加に転じるタイミングを基に踵接地時を判別する手段と、
前記合成加速度が増加から減少に転じるタイミングを基に爪先離地時を判別する手段と、
踵接地から踵接地直後の爪先離地までに要した時間を測定する手段と、備える、
ことを特徴とする請求項2に記載の測定装置。
【請求項5】
1歩行周期にかかる時間を取得する1歩行周期時間取得手段と、
1歩行周期にかかる時間と1歩行周期あたりの両足接地時間とを基に、1歩行周期に占める両足接地時間の割合を算出する算出手段と、
両足接地時間の割合が所定の閾値以上であるか否かを判別する判別手段と、を備える、
ことを特徴とする請求項1乃至4のいずれか1項に記載の測定装置。
【請求項6】
前記センサー出力取得手段は、
左右方向への加速度である左右加速度の計測出力を取得する手段、を備え、
1歩行周期時間取得手段は、
前記左右加速度の計測出力を基に、1歩行周期にかかる時間を取得する手段、を備える、
ことを特徴とする請求項5に記載の測定装置。
【請求項7】
歩行者の年齢、性別、身長、体重、または歩幅の情報を入力する情報入力手段と、
前記情報入力手段に入力された情報を基に、前記閾値を取得する閾値取得手段と、を備える、
ことを特徴とする請求項5または6に記載の測定装置。
【請求項8】
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得ステップと、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を取得する両足接地時間取得ステップと、を有する、
ことを特徴とする測定方法。
【請求項9】
人体に設置され、人体に加わる加速度もしくは圧力を計測するセンサーからの出力を取得するセンサー出力取得ステップと、
センサー出力を基に、歩行時の一方の足の踵接地から他方の足の爪先離地までに要する時間である両足接地時間を取得する両足接地時間取得ステップと、をコンピュータに実行させる、
ことを特徴とする測定プログラム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2012−179114(P2012−179114A)
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願番号】特願2011−42722(P2011−42722)
【出願日】平成23年2月28日(2011.2.28)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
【公開日】平成24年9月20日(2012.9.20)
【国際特許分類】
【出願日】平成23年2月28日(2011.2.28)
【出願人】(504136568)国立大学法人広島大学 (924)
【Fターム(参考)】
[ Back to top ]