
測定装置および方法

【課題】より少ない演算量で対象物に関係する情報を演算する。
【解決手段】2周波CWレーダ1は、自車の後方あるいは側方にある対象物を認識し(S11)、認識された対象物群を、自車に接近する対象物と、自車から離反する対象物とに判別し(S12)、接近離反の判別結果に基づいて、認識された対象物群の中から、自車に接近すると判別された対象物のみを抽出し(S13)、抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出し(S14)、測定結果sを出力する(S15)ことで、より少ない演算量で対象物に関係する情報を演算できる。本発明は、対象物を測定する測定装置に適用できる。
【解決手段】2周波CWレーダ1は、自車の後方あるいは側方にある対象物を認識し(S11)、認識された対象物群を、自車に接近する対象物と、自車から離反する対象物とに判別し(S12)、接近離反の判別結果に基づいて、認識された対象物群の中から、自車に接近すると判別された対象物のみを抽出し(S13)、抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出し(S14)、測定結果sを出力する(S15)ことで、より少ない演算量で対象物に関係する情報を演算できる。本発明は、対象物を測定する測定装置に適用できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定装置および方法に関し、特に、より少ない演算量で対象物に関係する情報を演算することができるようになった測定装置および方法に関する。
【背景技術】
【0002】
従来、自車と他車との間の相対速度や距離を測定するセンサとして、2周波CW(Continuous Wave)方式のセンサ(以下、2周波CWレーダと称する)が知られている(例えば特許文献1,2参照)。即ち、この2周波CWレーダは、送信信号の対象物での反射信号についてのドップラ信号の周波数(以下、ドップラ周波数と称する)や位相を検出し、その検出結果を用いて他車の相対速度や距離を測定する。
【0003】
自動車(自車)には、このような2周波CWレーダ等のセンサを用いて先行車(他車)との車間距離を一定に保ちながら自動追従できるACC(アダプティブ・クルーズ・コントロール)システムが搭載されている。また、近年では、このような2周波CWレーダ等のセンサを用いて自車と他車に衝突しそうであること(プリクラッシュ)を検知して衝突時に衝撃を軽減するためのプリクラッシュシステムが搭載されてきた。
【0004】
このように、自動車にはセンサからの信号を利用した用途の異なるシステムが複数搭載されるようになってきている。
【特許文献1】特許第3203600号公報
【特許文献2】特開2004−69693号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のレーダでは検知範囲内の対象物の全てを検知し、その中から目的に応じた対象物を演算によって抽出する処理を行っていた。
【0006】
例えば、自車前方に搭載する車載レーダをACCに用いる場合について考えると、前方を走行する他車を特定するために、路側のガードレールや操舵角より道路形状を推定し、その形状から道路前方に存在する他車を特定する、といった具合である。
【0007】
即ち、この場合、電波の届く全ての物体からの反射波を受信するため、その中から用途に応じて必要な対象物を抽出するための処理が必要となっていた。そのため、必要な対象物を抽出するための処理の演算量が増えてしまうという問題があった。
【0008】
このことは、例えば、衝突防止といった危険防止を目的とする車載レーダであっても同様のことが言え、その場合には、検出される対象物群より、自車にとって危険な対象物を抽出し、追跡する処理が行われている。
【0009】
本発明はこのような状況に鑑みてなされたものであり、より少ない演算量で対象物に関係する情報を演算することができるようにするものである。
【課題を解決するための手段】
【0010】
本発明の一側面の測定装置は、車両の後方または側方に設置され、所定の周波数にて送信された送信信号の対象物での反射信号を用いて、前記対象物を測定する測定装置において、前記車両の後方あるいは側方にある対象物を認識する認識手段と、認識された前記対象物を、前記車両に接近する対象物と、前記車両から離反する対象物とに判別する判別手段と、接近離反の判別結果に基づいて、認識された前記対象物から、前記車両に接近すると判別された対象物のみを抽出する抽出手段と、抽出された前記対象物との距離または相対速度の少なくとも一方を算出する算出手段とを備える。
【0011】
これにより、例えば、トラッキング処理等の危険度判定を行うための処理の演算量を低減することができ、より安価な演算部品でレーダを構成することが可能となる。
【0012】
つまり、算出手段は、自車の後方あるいは側方にあると識別された対象物のうち、自車に近接する対象物との距離や相対速度等を算出できる。このことは、衝突の可能性のある他車を予め絞り込むことができることを意味する。
【0013】
各手段は、例えば、マイクロコンピュータにより、あるいは、演算制御回路により、またはそれらの組み合わせにより構成される。換言すると、各手段は、1つの単位(例えば回路基板等の単位)で構成する必要もなく、幾つかの単位に分割して構成するようにしてもよい。また、各部は個別に構成する必要もなく、複数の手段を組み合わせて、即ち、複数の手段を1つの単位として構成するようにしてもよい。
【0014】
前記送信信号は、第1の周波数を有する第1の送信信号と、第2の周波数を有する第2の送信信号を含み、前記送信信号と前記反射信号とから生成される混合信号は、前記第1の送信信号を基に生成された第1のドップラ信号と前記第2の送信信号を基に生成された第2のドップラ信号を含み、前記認識手段は、前記第1のドップラ信号と前記第2のドップラ信号とに対してFFT解析処理を施すことで得られたドップラ周波数に基づいて、前記車両の後方あるいは側方にある対象物を認識し、前記判別手段は、前記FFT解析処理により得られた位相に基づいて、識別された前記対象物を、接近または離反の対象物に判別する。
【0015】
これにより、例えば、測定装置として、2周波CWレーダを採用することが容易にできるようになる。この場合、異なる周波数の2種類の連続波が送信信号として送信されるので、混合信号は各々の周波数について生成されるので2種類生成される。
【0016】
前記算出手段は、前記FFT解析処理により得られたドップラ周波数または前記第1のドップラ信号と前記第2のドップラ信号の位相差に基づいて、前記距離または前記相対速度を算出する。
【0017】
例えば、ひとつの混合信号を用いれば、そこに含まれるドップラ周波数から対象物との相対速度が測定される。また、2種類の混合信号を利用すれば、それらの位相差が求まるので、この位相差により対象物との距離が測定できる。
【0018】
前記測定装置は、2周波CW方式のレーダである。
【0019】
前記算出手段による演算結果を、前記算出手段によって求められた演算結果を利用する所定の処理を行う情報処理装置に出力する出力手段をさらに備える。
【0020】
これにより、例えば、情報処理装置として用いられる処理演算装置では、自車に接近してくる他車についてのみ、演算処理を行えばよいことなる。その結果、危険度判定のための演算量を低減することができる。
【0021】
前記算出手段よって求められた演算結果を利用する所定の処理を行う処理手段をさらに備える。
【0022】
これにより、例えば、処理手段としての演算処理部では、自車に接近してくる他車についてのみ、演算処理を行えばよく、危険度判定のための演算量を低減することができる。
【0023】
本発明の一側面の測定方法は、上述した本発明の一側面の測定装置に対応する方法である。
【発明の効果】
【0024】
以上の如く、本発明の一側面によれば、より少ない演算量で対象物に関係する情報を演算することができる。特に、より少ない演算量で危険度の判定を行うことができる。
【発明を実施するための最良の形態】
【0025】
以下、図面を参照しながら本発明の実施の形態について説明する。
【0026】
本発明は、レーダが危険防止に用いられる場合、抽出対象は、「接近する対象物」に限られることに着目し、レーダでの演算において速度が接近方向の対象物のみを、「危険性のある対象物」として抽出する点に特徴がある。これは、特に、かかるレーダが車両後方に設置される場合に効果的となる。
【0027】
そこで、まず、図1および図2を参照して、本発明における「危険性のある対象物」を抽出する原理について説明する。
【0028】
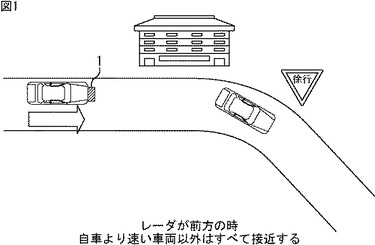
図1においては、図中の左から右方向に向かって2台の車両が走行している。2台の車両のうちの左側の車両(自車)の前方にはレーダ1が設置されており、そのレーダ1により、もう一方の車両であって、自車の前方を走行している右側の車両(他車)や建物、道路標識等が検知される。
【0029】
この場合、自車よりも速い車両以外、即ち、自車よりも遅い車両、建物、道路標識、壁面、看板等が、「接近する対象物」として抽出されることになる。
【0030】
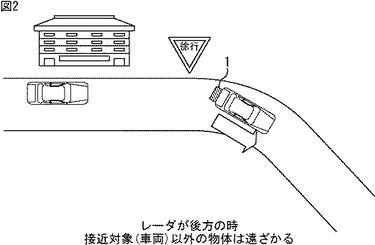
それに対して、図2に示すように、2台の車両のうちの右側の車両(自車)の後方にレーダ1が設定されている場合、そのレーダ1によって、自車の後方を走行している左側の車両(他車)が検知される。
【0031】
この場合、接近対象物(他車)以外の対象物は遠ざかるので、他車のみが、「接近する対象物」として抽出されることになる。
【0032】
即ち、図1のように、レーダ1を自車前方に設置した場合には、自車よりも速い車両以外は全て「接近する対象物」として抽出する必要があるが、図2のように、レーダ1を自車後方に設置した場合には、接近対象物(他車)以外のものは遠ざかるので、自車に接近してくる他車のみを、「接近する対象物」として抽出すればよいことになる。その結果、離れていく他車のみならず、(自車の進行方向の後方に)相対的に遠ざかる建物、道路標識、壁面、看板等といった対象物については、危険判定処理を行う必要がなくなるので、より少ない演算量で危険度の判定を行うことが可能となる。
【0033】
次に、上述した原理によって、接近対象物である自車の後方あるいは側方を走行する他車のみを、「接近する対象物」として抽出する処理を行う測定システムについて説明する。
【0034】
なお、かかる測定システムにおいて用いられるレーダ1としては、様々なレーダを用いることが可能であるが、本実施の形態では、2周波CW方式による測定を行うレーダ(以下、2周波CWレーダ1という)を採用した場合について説明する。その他のレーダの方式としては、例えば、FMCW(Frequency Modulated Continuous Wave)やUWB(Ultra Wide Band)等を採用することも可能である。
【0035】
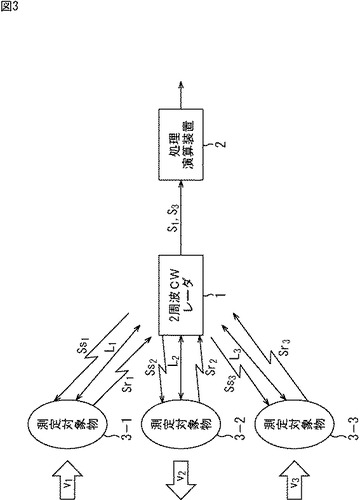
図3は、本発明を適用した測定システムの一実施の形態の構成例を示している。
【0036】
図3の測定システムは、請求項記載の測定装置としての2周波CWレーダ1と、処理演算装置2とから構成されている。この処理演算装置2は、例えばマイクロコンピュータ等で構成することができる。
【0037】
2周波CWレーダ1は、その名称の如く、2周波CW方式による測定を行うことができる。2周波CWレーダ1は、自車後方または側方に設置される。
【0038】
ここで、2周波CW方式による測定の概略について説明する。
【0039】
2周波CWレーダ1は、周波数f1のCW(Continuous Wave)と、周波数f2のCWとを時分割で切り替えた結果得られる信号(以下、2周波CWと称する)を生成し、その2周波CWを送信信号Ssとして出力する。
【0040】
この送信信号Ssは測定対象物3において反射し、その反射信号が受信信号Srとして2周波CWレーダ1に受信される。
【0041】
このとき、2周波CWレーダ1と測定対象物3との間に相対速度vが存在すれば、送信信号Ssの周波数f1,f2のそれぞれに対してドップラ周波数△f1,△f2のそれぞれが発生し、その結果、受信信号Srの周波数は、周波数f1+△f1,f2+△f2となる。換言すると、2つの周波数f1+△f1,f2+△f2を有する2周波CWが、受信信号Srと等価な信号となる。
【0042】
そこで、2周波CWレーダ1は、この受信信号Srからドップラ周波数△f1または△f2を検出して、次の式(1)または式(2)の演算を行うことで、2周波CWレーダ1に対する測定対象物3の相対速度vを求めることができる。
【0043】
v = c × △f1 / (2 × f1) ・・・(1)
v = c × △f2 / (2 × f2) ・・・(2)
なお、cは光速を表している。
【0044】
また、2周波CWレーダ1は、ドップラ周波数△f1であるドップラ信号の位相φ1と、ドップラ周波数△f2であるドップラ信号の位相φ2とを、受信信号Srから検出して、次の式(3)の演算を行うことで、2周波CWレーダ1と測定対象物3との間の距離Lを求めることができる。
【0045】
L = c × (φ1 − φ2) / (4π × (f1 − f2)) ・・・(3)
【0046】
このような一連の処理により行われる測定が、2周波CW方式による測定である。
【0047】
また、上述したように、本実施の形態において、2周波CWレーダ1は、検知範囲内の全ての対象物ではなく、自車に接近する対象物のみを危険可能性のあるターゲット(対象物)として抽出する処理を行う。
【0048】
具体的には、図3に示すように、2周波CWレーダ1によって、測定対象物3−1乃至測定対象物3−3の3つの測定対象物が測定されているとすると、それらの測定対象物に対して、それぞれ、送信信号Ss1乃至送信信号Ss3が出力され、それらの送信信号Ss1乃至送信信号Ss3が各測定対象物において反射され、その反射信号が受信信号Sr1乃至受信信号Sr3として2周波CWレーダ1に受信される。
【0049】
2周波CWレーダ1は、受信した受信信号Sr1乃至受信信号Sr3に対して所定の解析処理を施すことで、測定対象物3−1乃至測定対象物3−3のそれぞれを、自車に接近する対象物と、自車から離反する対象物とに判別する。図3の例の場合、図中の各測定対象物の左側の矢印の方向が示すように、測定対象物3−1および測定対象物3−3が自車に接近する対象物、測定対象物3−2が自車から離反する対象物としてそれぞれ判別される。
【0050】
続いて、2周波CWレーダ1は、自車に接近する対象物、即ち、測定対象物3−1および測定対象物3−3について、それらの測定対象物との相対速度vや距離L等を算出し、処理演算装置2に出力する。相対速度vや距離Lの算出方法は上述した通りである。
【0051】
処理演算装置2は、2周波CWレーダ1から提供される測定結果s1,s3(自車に接近する測定対象物3−1と測定対象物3−3の測定結果)に基づいて、例えば、危険度判定処理を行うためのトラッキング処理等の所定の処理を行う。
【0052】
以上のようにして、測定システムは構成される。
【0053】
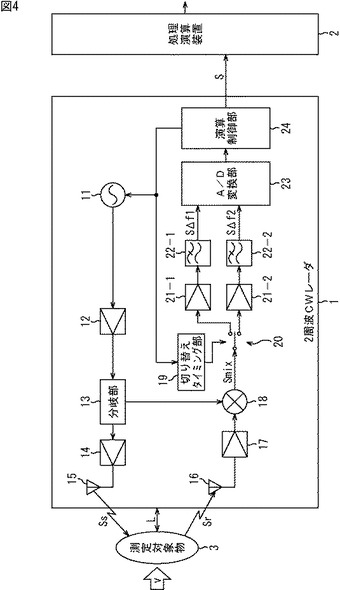
次に、図4を参照して、2周波CWレーダ1の詳細な構成について説明する。
【0054】
なお、図4においては、説明を簡略にするために、図3の測定対象物3−1乃至測定対象物3−3の代わりに、自車に接近する測定対象物3のみを図示している。
【0055】
図4の例の2周波CWレーダ1は、発振部11乃至演算制御部24を含むように構成されている。
【0056】
発振部11は、演算制御部24の制御に基づいて、周波数f1のCWと周波数f2のCWとを交互に切り替えて発振する。即ち、周波数f1,f2を有する2周波CWが発振部11から出力され、増幅部12に提供される。
【0057】
増幅部12は、この2周波CWに対して増幅処理等の各種処理を適宜施して、分岐部13に提供する。
【0058】
分岐部13は、増幅部12からの2周波CW、即ち、周波数f1,f2を有する2周波CWを、増幅部14と混合部18とのそれぞれに提供する。
【0059】
増幅部14は、分岐部13からの2周波CW、即ち、周波数f1,f2を有する2周波CWを、増幅処理等の各種処理を適宜施し、その結果得られる信号を出力信号としてアンテナ部15に提供する。この増幅部14の出力信号が送信信号Ssとして、電波の形態でアンテナ部15から出力される。
【0060】
なお、2周波CWは、必要に応じて、所定の変調方式により変調された上で、送信信号Ssとして、アンテナ部15から出力される。この変調処理は、例えば増幅部14において実行されるとする。
【0061】
送信信号Ssは測定対象物3で反射し、その反射信号が受信信号Srとしてアンテナ部16に受信される。
【0062】
なお、図4の例では、送信用のアンテナ部15と受信用のアンテナ部16とが別個に設けられているが、送信用と受信用とを併用する1つのアンテナ部を設けるようにしてもよい。
【0063】
増幅部17は、アンテナ部16に受信された受信信号Srに対して、増幅処理等の各種処理を適宜施し、その結果得られる2周波CWを出力信号として混合部18に提供する。なお、増幅部14が変調処理を実行している場合には、増幅部17は、さらに、上述した2周波CWを得るために、その変調処理に対応する復調処理を実行する。
【0064】
この増幅部17から出力される2周波CW、即ち、受信信号Srから得られた2周波CWは、上述したように、周波数f1+△f1と、周波数f2+△f2とを有する。即ち、増幅部17からは、あたかも、周波数f1+△f1のCWと、周波数f2+△f2のCWとが時分割で交互に切り替えられて順次出力されることになる。
【0065】
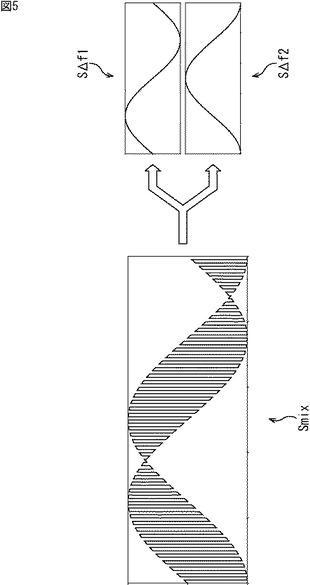
混合部18は、この増幅部17から出力される2周波CW(周波数f1+△f1,f2+△f2を有する2周波CW)と、分岐部13から出力される2周波CW(周波数f1,f2を有する2周波CW)とを混合し、その結果得られる混合信号Smix、具体的には例えば図5に示される波形を有する混合信号Smixを、スイッチ部20に出力する。
【0066】
スイッチ部20は、切り替えタイミング部19の制御に基づいて、その出力先を、増幅部21−1と増幅部21−2とのうちの一方から他方へ切り替える。即ち、切り替えタイミング部19は、演算制御部24による発振部11の発振周波数f1,f2の切り替えタイミングを監視し、周波数がf2からf1に切り替えられるタイミングで、スイッチ部20の出力先を増幅部21−1側に切り替え、また、周波数がf1からf2に切り替えられるタイミングで、スイッチ部20の出力先を増幅部21−2側に切り替える。
【0067】
即ち、混合信号Smixのうちの、発振部11が周波数f1のCWを発振している間に混合部18から出力された信号は、スイッチ部20を介して増幅部21−1に提供されて増幅処理等の各種処理が適宜施され、さらに、ローパスフィルタ部22−1により高域成分(ノイズ等)が除去された上で、信号S△f1としてA/D変換部23に提供される。この信号S△f1が、ドップラ周波数△f1を有するドップラ信号である。
【0068】
一方、混合信号Smixのうちの、発振部11が周波数f2のCWを発振している間に混合部18から出力された信号は、スイッチ部20を介して増幅部21−2に提供されて増幅処理等の各種処理が適宜施され、さらに、ローパスフィルタ部22−2により高域成分(ノイズ等)が除去された上で、信号S△f2としてA/D変換部23に提供される。この信号S△f2が、ドップラ周波数△f2を有するドップラ信号である。
【0069】
即ち、図5に示されるように、混合部18から出力された混合信号Smixは、切り替えタイミング部19乃至ローパスフィルタ部22−2により、ドップラ周波数△f1を有するドップラ信号S△f1と、ドップラ周波数△f2を有するドップラ信号S△f2とのそれぞれに分離されて、A/D変換部23にそれぞれ提供される。
【0070】
A/D変換部23は、ドップラ周波数△f1を有するドップラ信号S△f1と、ドップラ周波数△f2を有するドップラ信号S△f2とのそれぞれに対して、A/D変換(Analog to Digital変換)処理を施し、その結果得られるデジタルのドップラ信号S△f1とドップラ信号S△f2とのそれぞれを演算制御部24に提供する。
【0071】
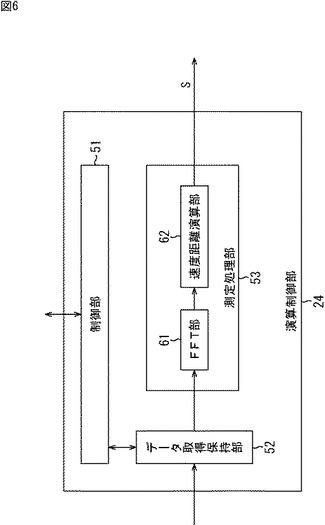
この演算制御部24の詳細な構成例が図6に示されている。図6の例では、演算制御部24は、制御部51乃至測定処理部53を含むように構成されている。
【0072】
制御部51は、演算制御部24内の制御を行う他、2周波CWレーダ1全体の制御、例えば上述したように、発振部11が発振するCWの周波数をf1とf2のうちの一方から他方へ切り替える制御等を行う。
【0073】
データ取得保持部52は、A/D変換部23からデジタルデータの形態で順次提供されてくる、ドップラ周波数△f1を有するドップラ信号S△f1と、ドップラ周波数△f2を有するドップラ信号S△f2とのそれぞれを個別に取得して保持する。なお、データ取得保持部52におけるデータの保持量は、後述する測定処理部53の1回の測定処理に必要なデータ量以上であれば、特に限定されない。
【0074】
測定処理部53は、FFT部61および速度距離演算部62を含むように構成される。
【0075】
FFT部61は、データ取得保持部52に保持されたデータを採取する。すると、次のような測定処理が、FFT部61および速度距離演算部62により実行される。
【0076】
即ち、FFT部61は、この採取データに対して例えば、FFT(Fast Fourier Transform)解析処理等を施すことで、ドップラ周波数△f1とその位相φ1を検出するとともに、ドップラ周波数△f2とその位相φ2を検出し、それらの検出結果(以下、FFT解析結果と称する)を、速度距離演算部62に提供する。
【0077】
速度距離演算部62は、FFT部61からのFFT解析結果に基づいて、検知範囲内の全ての対象物群から、自車に接近する測定対象物3のみを抽出し、抽出された測定対象物3の相対速度vや距離L等を算出する。そして、速度距離演算部62は、相対速度vと距離Lを含む測定結果sを生成して、処理演算装置2に出力する。
【0078】
次に、図4の2周波CWレーダ1の動作例について説明する。
【0079】
ただし、発振部11乃至A/D変換部23までが実行する動作については、従来の動作と基本的に同様であり、また、上述した発振部11乃至A/D変換部23の構成の説明を参照することで容易に理解可能であるため、ここではその説明については省略する。
【0080】
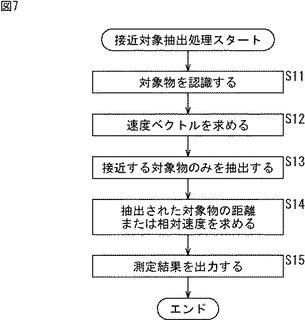
そこで、以下、図7のフローチャートを参照して、2周波CWレーダ1のうちの、特に本発明の特徴的なブロックである、図6の構成を有する演算制御部24の測定処理部53の動作例について説明する。
【0081】
ステップS11において、速度距離演算部62は、FFT部61から提供されるFFT解析結果に基づいて、ドップラ周波数のピークを検出することで、自車の後方あるいは側方にある対象物群(図3の例では、測定対象物3−1乃至測定対象物3−3)を認識する。なお、ここでいう対象物群には、複数の測定対象物に限らず、1つの測定対象物という意味も含まれる。
【0082】
ステップS12において、速度距離演算部62は、FFT部61から提供されるFFT解析結果に基づいて、認識された対象物群の速度ベクトルを求める。即ち、この速度ベクトルにより、認識された対象物が接近しているか、離反しているかを判別できる。具体的には、FFT部61において、FFT解析処理が行われると実数と虚数が求められ、その実数と虚数の比から位相が算出されるので、その位相によって、接近または離反を判別する。
【0083】
ステップS13において、速度距離演算部62は、速度ベクトルに基づいて、認識された対象物群から、自車に接近する対象物のみを抽出する。
【0084】
ステップS14において、速度距離演算部62は、自車に接近するとして抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出する。
【0085】
例えば、図3においては、測定対象物3−1乃至測定対象物3−3のうち、測定対象物3−1および測定対象物3−3が、接近する対象物として抽出されるので、速度距離演算部62は、測定対象物3−1との距離L1と相対速度v1および測定対象物3−3との距離L3と相対速度v3をそれぞれ算出する。
【0086】
より具体的には、速度距離演算部62は、FFT部61からのドップラ周波数△f1を用いて、上述した式(1)を演算するか、または、FFT部61からのドップラ周波数△f2を用いて、上述した式(2)を演算し、その演算結果を、測定対象物3−1の相対速度v1および測定対象物3−3の相対速度v3とする。
【0087】
また、速度距離演算部62は、FFT部61からの位相φ1と位相φ2との差、即ち、位相差φ1−φ2を算出し、この位相差φ1−φ2を用いて、上述した式(3)を演算し、その演算結果を、測定対象物3−1の距離L1および測定対象物3−3の距離L3とする。
【0088】
ステップS15において、速度距離演算部62は、相対速度vと距離Lを含む測定結果sを生成して、処理演算装置2に出力し、接近対象抽出処理は終了する。
【0089】
例えば、図3の例の場合、測定対象物3−1の相対速度v1および距離L1を含む測定結果s1と、測定対象物3−3の相対速度v3と距離L3を含む測定結果s3が、処理演算装置2に出力される。そして、処理演算装置2は、その測定結果s1,s3を用いて、例えばトラッキング処理等の、2周波CW方式の測定結果を利用する所定の処理を行う。
【0090】
なお、処理演算装置2が実行する処理は、2周波CW方式の測定処理結果を利用する処理であれば特に限定されない。
【0091】
以上のようにして、速度距離演算部62においては、認識された自車の後方あるいは側方にある対象物群の中から、自車に接近する対象物のみが抽出され、抽出された対象物との距離や相対速度等が算出される。
【0092】
即ち、本実施の形態において、自車後方に搭載される危険防止レーダの一例である2周波CWレーダ1では、自車が前方に進むとき、自車よりも速い速度で自車方向に進むもの以外は、相対的に自車よりも離れる方向に移動するので、このことを利用し、レーダ出力よりそもそも自車に接近する対象のみを危険可能性のあるターゲット(対象物)として抽出し、その抽出したターゲットにのみ危険度を判定する処理を施すようにしている。
【0093】
その結果、例えば、処理演算装置2によって実行される、トラッキング処理等の危険度判定を行うための処理の演算量を低減することができ、より安価な演算部品でレーダを構築することが可能となる。
【0094】
なお、本実施の形態では、2周波CW方式による測定を例にして説明したが、上述したように、FMCWやUWB等の方式を採用することも可能である。FMCW方式を採用した場合、2周波CW方式と同様に、図7の接近対象抽出処理を行うことで、接近する対象物を抽出できる。一方、UWB方式を採用した場合には、2周波CW方式のように速度ベクトルを直接求めることができないので、識別した対象物との距離を求めてから時間的な前後の距離関係に基づいて速度ベクトルを求めることになる。速度ベクトルを求めた後の処理は、2周波CW方式による、図7の接近対象抽出処理(図7のステップS13乃至ステップS15)と同様である。
【0095】
また、上述した例では、接近する対象物の全てを抽出するとして説明したが、例えば、危険度判定処理を行う場合には、接近してくる他車であっても、自車からある程度離れている他車であれば、必ずしも危険であるとは言いきれない。そこで、接近する対象物であっても距離Lが基準値を下回る場合には、その対象物は無視するなどしてもよい。
【0096】
ところで、上述した本発明の構成は、図3や図4の構成のシステムのみならず、様々な構成の装置やシステムに適用可能である。
【0097】
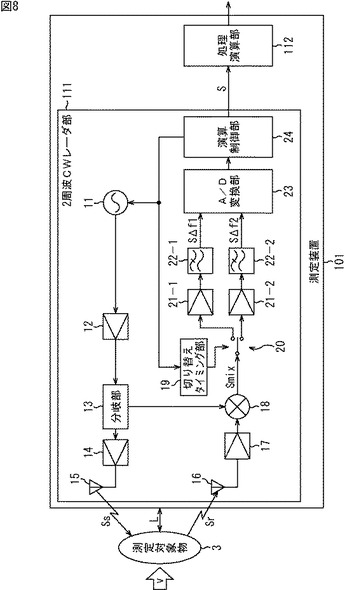
なお、ここに、システムとは、複数の処理装置や処理部により構成される装置全体を表すものである。換言すると、図4のシステムは、図8に示されるように、1つの測定装置101であると捉えることもできる。即ち、図8の例の測定装置101とは、2周波CWレーダ1に対応する一処理部としての2周波CWレーダ部111と、処理演算装置2に対応する一処理部としての処理演算部112とからなる1つの装置である。
【0098】
また、上述した例では、2周波CWレーダ1は、測定対象物3の相対速度vと距離Lとのみを測定したが、さらに別の物理量、例えば測定対象物3の角度等を測定するようにしてもよい。この場合の角度の測定手法も、特に限定されず、例えば、図4の受信用のアンテナ部16を2つのアンテナで構成することで、それらの2つのアンテナの受信信号の和と差の振幅比を用いて角度を算出する手法、即ち、いわゆるモノパルス方式を採用することもできる。
【0099】
さらに、本実施の形態では、位相差を求める方法の一例として、FFT解析処理によって位相差を求める態様について説明したが、これ以外の方法で位相差を求めても良い。例えば、タイムインターバル方式によって位相差を求めても良い。タイムインターバル方式とは、ドップラ信号S△f1,S△f2の立ち上がり時間と立ち下がり時間を観察することで、ドップラ周波数△f1,△f2の検出や、それらに対応する位相差φ1−φ2の検出を行う方式をいう。
【0100】
なお、ここでいう立ち上がり時間や立ち下り時間とは、信号電圧が変化するのに要する時間を意味するのではない。即ち、ドップラ信号S△f1,S△f2の波形が所定電圧値(例えば0V)を横切るタイミング(時刻)のうち、波形の変化状態が所定電圧値を境に上昇している状態のタイミングを、立ち上がり時間と称し、所定電圧値(例えば0V)を横切るタイミング(時刻)のうち、波形の変化状態が所定電圧値を境に下降している状態のタイミングを、立ち下り時間と称している。
【0101】
また、立ち上がり時間や立ち下り時間(位置)を正確に観察するため、ドップラ信号S△f1,S△f2自体を利用するのではなく、それをさらに増幅させた信号を利用すると好適である。“
【0102】
ところで、上述した一連の処理(或いはそのうちの一部分の処理)は、ハードウエアにより実行させることもできるが、ソフトウエアにより実行させることもできる。
【0103】
この場合、その一連の処理を実行する装置(上述した定義のシステム)またはその一部分は、例えば、図9に示されるようなコンピュータで構成することができる。
【0104】
図9において、CPU(Central Processing Unit)201は、ROM(Read Only Memory)202に記録されているプログラム、または記憶部208からRAM(Random Access Memory)203にロードされたプログラムに従って各種の処理を実行する。RAM203にはまた、CPU201が各種の処理を実行する上において必要なデータなども適宜記憶される。
【0105】
CPU201、ROM202、およびRAM203は、バス204を介して相互に接続されている。このバス204にはまた、入出力インタフェース205も接続されている。
【0106】
入出力インタフェース205には、キーボード、マウスなどよりなる入力部206、ディスプレイなどよりなる出力部207、ハードディスクなどより構成される記憶部208、および、モデム、ターミナルアダプタなどより構成される通信部209が接続されている。通信部209は、インターネットを含むネットワークを介して他の装置との通信処理を行う。さらにまた、通信部209は、必要に応じて、図3等でいう測定対象物3を測定するための送信信号Ssや受信信号Srの送受信処理も行う。
【0107】
入出力インタフェース205にはまた、必要に応じてドライブ210が接続され、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリなどよりなるリムーバブルメディア211が適宜装着され、それらから読み出されたコンピュータプログラムが、必要に応じて記憶部208にインストールされる。
【0108】
一連の処理をソフトウエアにより実行させる場合には、そのソフトウエアを構成するプログラムが、専用のハードウエアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどに、ネットワークや記録媒体からインストールされる。
【0109】
このようなプログラムを含む記録媒体は、図9に示されるように、装置本体とは別に、ユーザにプログラムを提供するために配布される、プログラムが記録されている磁気ディスク(フロッピディスクを含む)、光ディスク(CD−ROM(Compact Disk-Read Only Memory),DVD(Digital Versatile Disk)を含む)、光磁気ディスク(MD(Mini-Disk)を含む)、もしくは半導体メモリなどよりなるリムーバブルメディア(パッケージメディア)211により構成されるだけでなく、装置本体に予め組み込まれた状態でユーザに提供される、プログラムが記録されているROM202や、記憶部208に含まれるハードディスクなどで構成される。
【0110】
なお、本明細書において、記録媒体に格納されるプログラムを記述するステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0111】
また、本明細書において、システムとは、複数の装置により構成される装置全体を表すものである。
【0112】
さらに、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【図面の簡単な説明】
【0113】
【図1】レーダを自車前方に設置した場合について説明する図である。
【図2】レーダを自車後方に設置した場合について説明する図である。
【図3】本発明が適用される測定システムの構成例を示すブロック図である。
【図4】図3の2周波CWレーダの詳細な構成例を示すブロック図である。
【図5】2つのドップラ周波数△f1,△f2を有するドップラ信号の分離手法の一例を説明する図である。
【図6】図4の演算制御部の詳細な構成例を示すブロック図である。
【図7】接近対象抽出処理について説明するフローチャートである。
【図8】本発明が適用される測定装置の構成例を示すブロック図である。
【図9】本発明が適用される測定システムや測定装置の全部または一部の構成の別の例を示すブロック図である。
【符号の説明】
【0114】
1 2周波CWレーダ
2 処理演算装置
3,3−1乃至3−3 測定対象物
11 発振部
12 増幅部
13 分岐部
14 増幅部
15 アンテナ部
16 アンテナ部
17 増幅部
18 混合部
19 切り替えタイミング部
20 スイッチ部
21−1,21−2 増幅部
22−1,22−2 ローパスフィルタ
23 A/D変換部
24 演算制御部
51 制御部
52 データ取得保持部
53 測定処理部
61 FFT部
62 速度距離演算部
101 測定装置
111 2周波CWレーダ部
112 処理演算部
201 CPU
202 ROM
203 RAM
204 バス
205 入出力インタフェース
206 入力部
207 出力部
208 記憶部
209 通信部
210 ドライブ
211 リムーバブルメディア
【技術分野】
【0001】
本発明は、測定装置および方法に関し、特に、より少ない演算量で対象物に関係する情報を演算することができるようになった測定装置および方法に関する。
【背景技術】
【0002】
従来、自車と他車との間の相対速度や距離を測定するセンサとして、2周波CW(Continuous Wave)方式のセンサ(以下、2周波CWレーダと称する)が知られている(例えば特許文献1,2参照)。即ち、この2周波CWレーダは、送信信号の対象物での反射信号についてのドップラ信号の周波数(以下、ドップラ周波数と称する)や位相を検出し、その検出結果を用いて他車の相対速度や距離を測定する。
【0003】
自動車(自車)には、このような2周波CWレーダ等のセンサを用いて先行車(他車)との車間距離を一定に保ちながら自動追従できるACC(アダプティブ・クルーズ・コントロール)システムが搭載されている。また、近年では、このような2周波CWレーダ等のセンサを用いて自車と他車に衝突しそうであること(プリクラッシュ)を検知して衝突時に衝撃を軽減するためのプリクラッシュシステムが搭載されてきた。
【0004】
このように、自動車にはセンサからの信号を利用した用途の異なるシステムが複数搭載されるようになってきている。
【特許文献1】特許第3203600号公報
【特許文献2】特開2004−69693号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来のレーダでは検知範囲内の対象物の全てを検知し、その中から目的に応じた対象物を演算によって抽出する処理を行っていた。
【0006】
例えば、自車前方に搭載する車載レーダをACCに用いる場合について考えると、前方を走行する他車を特定するために、路側のガードレールや操舵角より道路形状を推定し、その形状から道路前方に存在する他車を特定する、といった具合である。
【0007】
即ち、この場合、電波の届く全ての物体からの反射波を受信するため、その中から用途に応じて必要な対象物を抽出するための処理が必要となっていた。そのため、必要な対象物を抽出するための処理の演算量が増えてしまうという問題があった。
【0008】
このことは、例えば、衝突防止といった危険防止を目的とする車載レーダであっても同様のことが言え、その場合には、検出される対象物群より、自車にとって危険な対象物を抽出し、追跡する処理が行われている。
【0009】
本発明はこのような状況に鑑みてなされたものであり、より少ない演算量で対象物に関係する情報を演算することができるようにするものである。
【課題を解決するための手段】
【0010】
本発明の一側面の測定装置は、車両の後方または側方に設置され、所定の周波数にて送信された送信信号の対象物での反射信号を用いて、前記対象物を測定する測定装置において、前記車両の後方あるいは側方にある対象物を認識する認識手段と、認識された前記対象物を、前記車両に接近する対象物と、前記車両から離反する対象物とに判別する判別手段と、接近離反の判別結果に基づいて、認識された前記対象物から、前記車両に接近すると判別された対象物のみを抽出する抽出手段と、抽出された前記対象物との距離または相対速度の少なくとも一方を算出する算出手段とを備える。
【0011】
これにより、例えば、トラッキング処理等の危険度判定を行うための処理の演算量を低減することができ、より安価な演算部品でレーダを構成することが可能となる。
【0012】
つまり、算出手段は、自車の後方あるいは側方にあると識別された対象物のうち、自車に近接する対象物との距離や相対速度等を算出できる。このことは、衝突の可能性のある他車を予め絞り込むことができることを意味する。
【0013】
各手段は、例えば、マイクロコンピュータにより、あるいは、演算制御回路により、またはそれらの組み合わせにより構成される。換言すると、各手段は、1つの単位(例えば回路基板等の単位)で構成する必要もなく、幾つかの単位に分割して構成するようにしてもよい。また、各部は個別に構成する必要もなく、複数の手段を組み合わせて、即ち、複数の手段を1つの単位として構成するようにしてもよい。
【0014】
前記送信信号は、第1の周波数を有する第1の送信信号と、第2の周波数を有する第2の送信信号を含み、前記送信信号と前記反射信号とから生成される混合信号は、前記第1の送信信号を基に生成された第1のドップラ信号と前記第2の送信信号を基に生成された第2のドップラ信号を含み、前記認識手段は、前記第1のドップラ信号と前記第2のドップラ信号とに対してFFT解析処理を施すことで得られたドップラ周波数に基づいて、前記車両の後方あるいは側方にある対象物を認識し、前記判別手段は、前記FFT解析処理により得られた位相に基づいて、識別された前記対象物を、接近または離反の対象物に判別する。
【0015】
これにより、例えば、測定装置として、2周波CWレーダを採用することが容易にできるようになる。この場合、異なる周波数の2種類の連続波が送信信号として送信されるので、混合信号は各々の周波数について生成されるので2種類生成される。
【0016】
前記算出手段は、前記FFT解析処理により得られたドップラ周波数または前記第1のドップラ信号と前記第2のドップラ信号の位相差に基づいて、前記距離または前記相対速度を算出する。
【0017】
例えば、ひとつの混合信号を用いれば、そこに含まれるドップラ周波数から対象物との相対速度が測定される。また、2種類の混合信号を利用すれば、それらの位相差が求まるので、この位相差により対象物との距離が測定できる。
【0018】
前記測定装置は、2周波CW方式のレーダである。
【0019】
前記算出手段による演算結果を、前記算出手段によって求められた演算結果を利用する所定の処理を行う情報処理装置に出力する出力手段をさらに備える。
【0020】
これにより、例えば、情報処理装置として用いられる処理演算装置では、自車に接近してくる他車についてのみ、演算処理を行えばよいことなる。その結果、危険度判定のための演算量を低減することができる。
【0021】
前記算出手段よって求められた演算結果を利用する所定の処理を行う処理手段をさらに備える。
【0022】
これにより、例えば、処理手段としての演算処理部では、自車に接近してくる他車についてのみ、演算処理を行えばよく、危険度判定のための演算量を低減することができる。
【0023】
本発明の一側面の測定方法は、上述した本発明の一側面の測定装置に対応する方法である。
【発明の効果】
【0024】
以上の如く、本発明の一側面によれば、より少ない演算量で対象物に関係する情報を演算することができる。特に、より少ない演算量で危険度の判定を行うことができる。
【発明を実施するための最良の形態】
【0025】
以下、図面を参照しながら本発明の実施の形態について説明する。
【0026】
本発明は、レーダが危険防止に用いられる場合、抽出対象は、「接近する対象物」に限られることに着目し、レーダでの演算において速度が接近方向の対象物のみを、「危険性のある対象物」として抽出する点に特徴がある。これは、特に、かかるレーダが車両後方に設置される場合に効果的となる。
【0027】
そこで、まず、図1および図2を参照して、本発明における「危険性のある対象物」を抽出する原理について説明する。
【0028】
図1においては、図中の左から右方向に向かって2台の車両が走行している。2台の車両のうちの左側の車両(自車)の前方にはレーダ1が設置されており、そのレーダ1により、もう一方の車両であって、自車の前方を走行している右側の車両(他車)や建物、道路標識等が検知される。
【0029】
この場合、自車よりも速い車両以外、即ち、自車よりも遅い車両、建物、道路標識、壁面、看板等が、「接近する対象物」として抽出されることになる。
【0030】
それに対して、図2に示すように、2台の車両のうちの右側の車両(自車)の後方にレーダ1が設定されている場合、そのレーダ1によって、自車の後方を走行している左側の車両(他車)が検知される。
【0031】
この場合、接近対象物(他車)以外の対象物は遠ざかるので、他車のみが、「接近する対象物」として抽出されることになる。
【0032】
即ち、図1のように、レーダ1を自車前方に設置した場合には、自車よりも速い車両以外は全て「接近する対象物」として抽出する必要があるが、図2のように、レーダ1を自車後方に設置した場合には、接近対象物(他車)以外のものは遠ざかるので、自車に接近してくる他車のみを、「接近する対象物」として抽出すればよいことになる。その結果、離れていく他車のみならず、(自車の進行方向の後方に)相対的に遠ざかる建物、道路標識、壁面、看板等といった対象物については、危険判定処理を行う必要がなくなるので、より少ない演算量で危険度の判定を行うことが可能となる。
【0033】
次に、上述した原理によって、接近対象物である自車の後方あるいは側方を走行する他車のみを、「接近する対象物」として抽出する処理を行う測定システムについて説明する。
【0034】
なお、かかる測定システムにおいて用いられるレーダ1としては、様々なレーダを用いることが可能であるが、本実施の形態では、2周波CW方式による測定を行うレーダ(以下、2周波CWレーダ1という)を採用した場合について説明する。その他のレーダの方式としては、例えば、FMCW(Frequency Modulated Continuous Wave)やUWB(Ultra Wide Band)等を採用することも可能である。
【0035】
図3は、本発明を適用した測定システムの一実施の形態の構成例を示している。
【0036】
図3の測定システムは、請求項記載の測定装置としての2周波CWレーダ1と、処理演算装置2とから構成されている。この処理演算装置2は、例えばマイクロコンピュータ等で構成することができる。
【0037】
2周波CWレーダ1は、その名称の如く、2周波CW方式による測定を行うことができる。2周波CWレーダ1は、自車後方または側方に設置される。
【0038】
ここで、2周波CW方式による測定の概略について説明する。
【0039】
2周波CWレーダ1は、周波数f1のCW(Continuous Wave)と、周波数f2のCWとを時分割で切り替えた結果得られる信号(以下、2周波CWと称する)を生成し、その2周波CWを送信信号Ssとして出力する。
【0040】
この送信信号Ssは測定対象物3において反射し、その反射信号が受信信号Srとして2周波CWレーダ1に受信される。
【0041】
このとき、2周波CWレーダ1と測定対象物3との間に相対速度vが存在すれば、送信信号Ssの周波数f1,f2のそれぞれに対してドップラ周波数△f1,△f2のそれぞれが発生し、その結果、受信信号Srの周波数は、周波数f1+△f1,f2+△f2となる。換言すると、2つの周波数f1+△f1,f2+△f2を有する2周波CWが、受信信号Srと等価な信号となる。
【0042】
そこで、2周波CWレーダ1は、この受信信号Srからドップラ周波数△f1または△f2を検出して、次の式(1)または式(2)の演算を行うことで、2周波CWレーダ1に対する測定対象物3の相対速度vを求めることができる。
【0043】
v = c × △f1 / (2 × f1) ・・・(1)
v = c × △f2 / (2 × f2) ・・・(2)
なお、cは光速を表している。
【0044】
また、2周波CWレーダ1は、ドップラ周波数△f1であるドップラ信号の位相φ1と、ドップラ周波数△f2であるドップラ信号の位相φ2とを、受信信号Srから検出して、次の式(3)の演算を行うことで、2周波CWレーダ1と測定対象物3との間の距離Lを求めることができる。
【0045】
L = c × (φ1 − φ2) / (4π × (f1 − f2)) ・・・(3)
【0046】
このような一連の処理により行われる測定が、2周波CW方式による測定である。
【0047】
また、上述したように、本実施の形態において、2周波CWレーダ1は、検知範囲内の全ての対象物ではなく、自車に接近する対象物のみを危険可能性のあるターゲット(対象物)として抽出する処理を行う。
【0048】
具体的には、図3に示すように、2周波CWレーダ1によって、測定対象物3−1乃至測定対象物3−3の3つの測定対象物が測定されているとすると、それらの測定対象物に対して、それぞれ、送信信号Ss1乃至送信信号Ss3が出力され、それらの送信信号Ss1乃至送信信号Ss3が各測定対象物において反射され、その反射信号が受信信号Sr1乃至受信信号Sr3として2周波CWレーダ1に受信される。
【0049】
2周波CWレーダ1は、受信した受信信号Sr1乃至受信信号Sr3に対して所定の解析処理を施すことで、測定対象物3−1乃至測定対象物3−3のそれぞれを、自車に接近する対象物と、自車から離反する対象物とに判別する。図3の例の場合、図中の各測定対象物の左側の矢印の方向が示すように、測定対象物3−1および測定対象物3−3が自車に接近する対象物、測定対象物3−2が自車から離反する対象物としてそれぞれ判別される。
【0050】
続いて、2周波CWレーダ1は、自車に接近する対象物、即ち、測定対象物3−1および測定対象物3−3について、それらの測定対象物との相対速度vや距離L等を算出し、処理演算装置2に出力する。相対速度vや距離Lの算出方法は上述した通りである。
【0051】
処理演算装置2は、2周波CWレーダ1から提供される測定結果s1,s3(自車に接近する測定対象物3−1と測定対象物3−3の測定結果)に基づいて、例えば、危険度判定処理を行うためのトラッキング処理等の所定の処理を行う。
【0052】
以上のようにして、測定システムは構成される。
【0053】
次に、図4を参照して、2周波CWレーダ1の詳細な構成について説明する。
【0054】
なお、図4においては、説明を簡略にするために、図3の測定対象物3−1乃至測定対象物3−3の代わりに、自車に接近する測定対象物3のみを図示している。
【0055】
図4の例の2周波CWレーダ1は、発振部11乃至演算制御部24を含むように構成されている。
【0056】
発振部11は、演算制御部24の制御に基づいて、周波数f1のCWと周波数f2のCWとを交互に切り替えて発振する。即ち、周波数f1,f2を有する2周波CWが発振部11から出力され、増幅部12に提供される。
【0057】
増幅部12は、この2周波CWに対して増幅処理等の各種処理を適宜施して、分岐部13に提供する。
【0058】
分岐部13は、増幅部12からの2周波CW、即ち、周波数f1,f2を有する2周波CWを、増幅部14と混合部18とのそれぞれに提供する。
【0059】
増幅部14は、分岐部13からの2周波CW、即ち、周波数f1,f2を有する2周波CWを、増幅処理等の各種処理を適宜施し、その結果得られる信号を出力信号としてアンテナ部15に提供する。この増幅部14の出力信号が送信信号Ssとして、電波の形態でアンテナ部15から出力される。
【0060】
なお、2周波CWは、必要に応じて、所定の変調方式により変調された上で、送信信号Ssとして、アンテナ部15から出力される。この変調処理は、例えば増幅部14において実行されるとする。
【0061】
送信信号Ssは測定対象物3で反射し、その反射信号が受信信号Srとしてアンテナ部16に受信される。
【0062】
なお、図4の例では、送信用のアンテナ部15と受信用のアンテナ部16とが別個に設けられているが、送信用と受信用とを併用する1つのアンテナ部を設けるようにしてもよい。
【0063】
増幅部17は、アンテナ部16に受信された受信信号Srに対して、増幅処理等の各種処理を適宜施し、その結果得られる2周波CWを出力信号として混合部18に提供する。なお、増幅部14が変調処理を実行している場合には、増幅部17は、さらに、上述した2周波CWを得るために、その変調処理に対応する復調処理を実行する。
【0064】
この増幅部17から出力される2周波CW、即ち、受信信号Srから得られた2周波CWは、上述したように、周波数f1+△f1と、周波数f2+△f2とを有する。即ち、増幅部17からは、あたかも、周波数f1+△f1のCWと、周波数f2+△f2のCWとが時分割で交互に切り替えられて順次出力されることになる。
【0065】
混合部18は、この増幅部17から出力される2周波CW(周波数f1+△f1,f2+△f2を有する2周波CW)と、分岐部13から出力される2周波CW(周波数f1,f2を有する2周波CW)とを混合し、その結果得られる混合信号Smix、具体的には例えば図5に示される波形を有する混合信号Smixを、スイッチ部20に出力する。
【0066】
スイッチ部20は、切り替えタイミング部19の制御に基づいて、その出力先を、増幅部21−1と増幅部21−2とのうちの一方から他方へ切り替える。即ち、切り替えタイミング部19は、演算制御部24による発振部11の発振周波数f1,f2の切り替えタイミングを監視し、周波数がf2からf1に切り替えられるタイミングで、スイッチ部20の出力先を増幅部21−1側に切り替え、また、周波数がf1からf2に切り替えられるタイミングで、スイッチ部20の出力先を増幅部21−2側に切り替える。
【0067】
即ち、混合信号Smixのうちの、発振部11が周波数f1のCWを発振している間に混合部18から出力された信号は、スイッチ部20を介して増幅部21−1に提供されて増幅処理等の各種処理が適宜施され、さらに、ローパスフィルタ部22−1により高域成分(ノイズ等)が除去された上で、信号S△f1としてA/D変換部23に提供される。この信号S△f1が、ドップラ周波数△f1を有するドップラ信号である。
【0068】
一方、混合信号Smixのうちの、発振部11が周波数f2のCWを発振している間に混合部18から出力された信号は、スイッチ部20を介して増幅部21−2に提供されて増幅処理等の各種処理が適宜施され、さらに、ローパスフィルタ部22−2により高域成分(ノイズ等)が除去された上で、信号S△f2としてA/D変換部23に提供される。この信号S△f2が、ドップラ周波数△f2を有するドップラ信号である。
【0069】
即ち、図5に示されるように、混合部18から出力された混合信号Smixは、切り替えタイミング部19乃至ローパスフィルタ部22−2により、ドップラ周波数△f1を有するドップラ信号S△f1と、ドップラ周波数△f2を有するドップラ信号S△f2とのそれぞれに分離されて、A/D変換部23にそれぞれ提供される。
【0070】
A/D変換部23は、ドップラ周波数△f1を有するドップラ信号S△f1と、ドップラ周波数△f2を有するドップラ信号S△f2とのそれぞれに対して、A/D変換(Analog to Digital変換)処理を施し、その結果得られるデジタルのドップラ信号S△f1とドップラ信号S△f2とのそれぞれを演算制御部24に提供する。
【0071】
この演算制御部24の詳細な構成例が図6に示されている。図6の例では、演算制御部24は、制御部51乃至測定処理部53を含むように構成されている。
【0072】
制御部51は、演算制御部24内の制御を行う他、2周波CWレーダ1全体の制御、例えば上述したように、発振部11が発振するCWの周波数をf1とf2のうちの一方から他方へ切り替える制御等を行う。
【0073】
データ取得保持部52は、A/D変換部23からデジタルデータの形態で順次提供されてくる、ドップラ周波数△f1を有するドップラ信号S△f1と、ドップラ周波数△f2を有するドップラ信号S△f2とのそれぞれを個別に取得して保持する。なお、データ取得保持部52におけるデータの保持量は、後述する測定処理部53の1回の測定処理に必要なデータ量以上であれば、特に限定されない。
【0074】
測定処理部53は、FFT部61および速度距離演算部62を含むように構成される。
【0075】
FFT部61は、データ取得保持部52に保持されたデータを採取する。すると、次のような測定処理が、FFT部61および速度距離演算部62により実行される。
【0076】
即ち、FFT部61は、この採取データに対して例えば、FFT(Fast Fourier Transform)解析処理等を施すことで、ドップラ周波数△f1とその位相φ1を検出するとともに、ドップラ周波数△f2とその位相φ2を検出し、それらの検出結果(以下、FFT解析結果と称する)を、速度距離演算部62に提供する。
【0077】
速度距離演算部62は、FFT部61からのFFT解析結果に基づいて、検知範囲内の全ての対象物群から、自車に接近する測定対象物3のみを抽出し、抽出された測定対象物3の相対速度vや距離L等を算出する。そして、速度距離演算部62は、相対速度vと距離Lを含む測定結果sを生成して、処理演算装置2に出力する。
【0078】
次に、図4の2周波CWレーダ1の動作例について説明する。
【0079】
ただし、発振部11乃至A/D変換部23までが実行する動作については、従来の動作と基本的に同様であり、また、上述した発振部11乃至A/D変換部23の構成の説明を参照することで容易に理解可能であるため、ここではその説明については省略する。
【0080】
そこで、以下、図7のフローチャートを参照して、2周波CWレーダ1のうちの、特に本発明の特徴的なブロックである、図6の構成を有する演算制御部24の測定処理部53の動作例について説明する。
【0081】
ステップS11において、速度距離演算部62は、FFT部61から提供されるFFT解析結果に基づいて、ドップラ周波数のピークを検出することで、自車の後方あるいは側方にある対象物群(図3の例では、測定対象物3−1乃至測定対象物3−3)を認識する。なお、ここでいう対象物群には、複数の測定対象物に限らず、1つの測定対象物という意味も含まれる。
【0082】
ステップS12において、速度距離演算部62は、FFT部61から提供されるFFT解析結果に基づいて、認識された対象物群の速度ベクトルを求める。即ち、この速度ベクトルにより、認識された対象物が接近しているか、離反しているかを判別できる。具体的には、FFT部61において、FFT解析処理が行われると実数と虚数が求められ、その実数と虚数の比から位相が算出されるので、その位相によって、接近または離反を判別する。
【0083】
ステップS13において、速度距離演算部62は、速度ベクトルに基づいて、認識された対象物群から、自車に接近する対象物のみを抽出する。
【0084】
ステップS14において、速度距離演算部62は、自車に接近するとして抽出された対象物との距離Lまたは相対速度vの少なくとも一方を算出する。
【0085】
例えば、図3においては、測定対象物3−1乃至測定対象物3−3のうち、測定対象物3−1および測定対象物3−3が、接近する対象物として抽出されるので、速度距離演算部62は、測定対象物3−1との距離L1と相対速度v1および測定対象物3−3との距離L3と相対速度v3をそれぞれ算出する。
【0086】
より具体的には、速度距離演算部62は、FFT部61からのドップラ周波数△f1を用いて、上述した式(1)を演算するか、または、FFT部61からのドップラ周波数△f2を用いて、上述した式(2)を演算し、その演算結果を、測定対象物3−1の相対速度v1および測定対象物3−3の相対速度v3とする。
【0087】
また、速度距離演算部62は、FFT部61からの位相φ1と位相φ2との差、即ち、位相差φ1−φ2を算出し、この位相差φ1−φ2を用いて、上述した式(3)を演算し、その演算結果を、測定対象物3−1の距離L1および測定対象物3−3の距離L3とする。
【0088】
ステップS15において、速度距離演算部62は、相対速度vと距離Lを含む測定結果sを生成して、処理演算装置2に出力し、接近対象抽出処理は終了する。
【0089】
例えば、図3の例の場合、測定対象物3−1の相対速度v1および距離L1を含む測定結果s1と、測定対象物3−3の相対速度v3と距離L3を含む測定結果s3が、処理演算装置2に出力される。そして、処理演算装置2は、その測定結果s1,s3を用いて、例えばトラッキング処理等の、2周波CW方式の測定結果を利用する所定の処理を行う。
【0090】
なお、処理演算装置2が実行する処理は、2周波CW方式の測定処理結果を利用する処理であれば特に限定されない。
【0091】
以上のようにして、速度距離演算部62においては、認識された自車の後方あるいは側方にある対象物群の中から、自車に接近する対象物のみが抽出され、抽出された対象物との距離や相対速度等が算出される。
【0092】
即ち、本実施の形態において、自車後方に搭載される危険防止レーダの一例である2周波CWレーダ1では、自車が前方に進むとき、自車よりも速い速度で自車方向に進むもの以外は、相対的に自車よりも離れる方向に移動するので、このことを利用し、レーダ出力よりそもそも自車に接近する対象のみを危険可能性のあるターゲット(対象物)として抽出し、その抽出したターゲットにのみ危険度を判定する処理を施すようにしている。
【0093】
その結果、例えば、処理演算装置2によって実行される、トラッキング処理等の危険度判定を行うための処理の演算量を低減することができ、より安価な演算部品でレーダを構築することが可能となる。
【0094】
なお、本実施の形態では、2周波CW方式による測定を例にして説明したが、上述したように、FMCWやUWB等の方式を採用することも可能である。FMCW方式を採用した場合、2周波CW方式と同様に、図7の接近対象抽出処理を行うことで、接近する対象物を抽出できる。一方、UWB方式を採用した場合には、2周波CW方式のように速度ベクトルを直接求めることができないので、識別した対象物との距離を求めてから時間的な前後の距離関係に基づいて速度ベクトルを求めることになる。速度ベクトルを求めた後の処理は、2周波CW方式による、図7の接近対象抽出処理(図7のステップS13乃至ステップS15)と同様である。
【0095】
また、上述した例では、接近する対象物の全てを抽出するとして説明したが、例えば、危険度判定処理を行う場合には、接近してくる他車であっても、自車からある程度離れている他車であれば、必ずしも危険であるとは言いきれない。そこで、接近する対象物であっても距離Lが基準値を下回る場合には、その対象物は無視するなどしてもよい。
【0096】
ところで、上述した本発明の構成は、図3や図4の構成のシステムのみならず、様々な構成の装置やシステムに適用可能である。
【0097】
なお、ここに、システムとは、複数の処理装置や処理部により構成される装置全体を表すものである。換言すると、図4のシステムは、図8に示されるように、1つの測定装置101であると捉えることもできる。即ち、図8の例の測定装置101とは、2周波CWレーダ1に対応する一処理部としての2周波CWレーダ部111と、処理演算装置2に対応する一処理部としての処理演算部112とからなる1つの装置である。
【0098】
また、上述した例では、2周波CWレーダ1は、測定対象物3の相対速度vと距離Lとのみを測定したが、さらに別の物理量、例えば測定対象物3の角度等を測定するようにしてもよい。この場合の角度の測定手法も、特に限定されず、例えば、図4の受信用のアンテナ部16を2つのアンテナで構成することで、それらの2つのアンテナの受信信号の和と差の振幅比を用いて角度を算出する手法、即ち、いわゆるモノパルス方式を採用することもできる。
【0099】
さらに、本実施の形態では、位相差を求める方法の一例として、FFT解析処理によって位相差を求める態様について説明したが、これ以外の方法で位相差を求めても良い。例えば、タイムインターバル方式によって位相差を求めても良い。タイムインターバル方式とは、ドップラ信号S△f1,S△f2の立ち上がり時間と立ち下がり時間を観察することで、ドップラ周波数△f1,△f2の検出や、それらに対応する位相差φ1−φ2の検出を行う方式をいう。
【0100】
なお、ここでいう立ち上がり時間や立ち下り時間とは、信号電圧が変化するのに要する時間を意味するのではない。即ち、ドップラ信号S△f1,S△f2の波形が所定電圧値(例えば0V)を横切るタイミング(時刻)のうち、波形の変化状態が所定電圧値を境に上昇している状態のタイミングを、立ち上がり時間と称し、所定電圧値(例えば0V)を横切るタイミング(時刻)のうち、波形の変化状態が所定電圧値を境に下降している状態のタイミングを、立ち下り時間と称している。
【0101】
また、立ち上がり時間や立ち下り時間(位置)を正確に観察するため、ドップラ信号S△f1,S△f2自体を利用するのではなく、それをさらに増幅させた信号を利用すると好適である。“
【0102】
ところで、上述した一連の処理(或いはそのうちの一部分の処理)は、ハードウエアにより実行させることもできるが、ソフトウエアにより実行させることもできる。
【0103】
この場合、その一連の処理を実行する装置(上述した定義のシステム)またはその一部分は、例えば、図9に示されるようなコンピュータで構成することができる。
【0104】
図9において、CPU(Central Processing Unit)201は、ROM(Read Only Memory)202に記録されているプログラム、または記憶部208からRAM(Random Access Memory)203にロードされたプログラムに従って各種の処理を実行する。RAM203にはまた、CPU201が各種の処理を実行する上において必要なデータなども適宜記憶される。
【0105】
CPU201、ROM202、およびRAM203は、バス204を介して相互に接続されている。このバス204にはまた、入出力インタフェース205も接続されている。
【0106】
入出力インタフェース205には、キーボード、マウスなどよりなる入力部206、ディスプレイなどよりなる出力部207、ハードディスクなどより構成される記憶部208、および、モデム、ターミナルアダプタなどより構成される通信部209が接続されている。通信部209は、インターネットを含むネットワークを介して他の装置との通信処理を行う。さらにまた、通信部209は、必要に応じて、図3等でいう測定対象物3を測定するための送信信号Ssや受信信号Srの送受信処理も行う。
【0107】
入出力インタフェース205にはまた、必要に応じてドライブ210が接続され、磁気ディスク、光ディスク、光磁気ディスク、或いは半導体メモリなどよりなるリムーバブルメディア211が適宜装着され、それらから読み出されたコンピュータプログラムが、必要に応じて記憶部208にインストールされる。
【0108】
一連の処理をソフトウエアにより実行させる場合には、そのソフトウエアを構成するプログラムが、専用のハードウエアに組み込まれているコンピュータ、または、各種のプログラムをインストールすることで、各種の機能を実行することが可能な、例えば汎用のパーソナルコンピュータなどに、ネットワークや記録媒体からインストールされる。
【0109】
このようなプログラムを含む記録媒体は、図9に示されるように、装置本体とは別に、ユーザにプログラムを提供するために配布される、プログラムが記録されている磁気ディスク(フロッピディスクを含む)、光ディスク(CD−ROM(Compact Disk-Read Only Memory),DVD(Digital Versatile Disk)を含む)、光磁気ディスク(MD(Mini-Disk)を含む)、もしくは半導体メモリなどよりなるリムーバブルメディア(パッケージメディア)211により構成されるだけでなく、装置本体に予め組み込まれた状態でユーザに提供される、プログラムが記録されているROM202や、記憶部208に含まれるハードディスクなどで構成される。
【0110】
なお、本明細書において、記録媒体に格納されるプログラムを記述するステップは、記載された順序に沿って時系列的に行われる処理はもちろん、必ずしも時系列的に処理されなくとも、並列的あるいは個別に実行される処理をも含むものである。
【0111】
また、本明細書において、システムとは、複数の装置により構成される装置全体を表すものである。
【0112】
さらに、本発明の実施の形態は、上述した実施の形態に限定されるものではなく、本発明の要旨を逸脱しない範囲において種々の変更が可能である。
【図面の簡単な説明】
【0113】
【図1】レーダを自車前方に設置した場合について説明する図である。
【図2】レーダを自車後方に設置した場合について説明する図である。
【図3】本発明が適用される測定システムの構成例を示すブロック図である。
【図4】図3の2周波CWレーダの詳細な構成例を示すブロック図である。
【図5】2つのドップラ周波数△f1,△f2を有するドップラ信号の分離手法の一例を説明する図である。
【図6】図4の演算制御部の詳細な構成例を示すブロック図である。
【図7】接近対象抽出処理について説明するフローチャートである。
【図8】本発明が適用される測定装置の構成例を示すブロック図である。
【図9】本発明が適用される測定システムや測定装置の全部または一部の構成の別の例を示すブロック図である。
【符号の説明】
【0114】
1 2周波CWレーダ
2 処理演算装置
3,3−1乃至3−3 測定対象物
11 発振部
12 増幅部
13 分岐部
14 増幅部
15 アンテナ部
16 アンテナ部
17 増幅部
18 混合部
19 切り替えタイミング部
20 スイッチ部
21−1,21−2 増幅部
22−1,22−2 ローパスフィルタ
23 A/D変換部
24 演算制御部
51 制御部
52 データ取得保持部
53 測定処理部
61 FFT部
62 速度距離演算部
101 測定装置
111 2周波CWレーダ部
112 処理演算部
201 CPU
202 ROM
203 RAM
204 バス
205 入出力インタフェース
206 入力部
207 出力部
208 記憶部
209 通信部
210 ドライブ
211 リムーバブルメディア
【特許請求の範囲】
【請求項1】
車両の後方または側方に設置され、所定の周波数にて送信された送信信号の対象物での反射信号を用いて、前記対象物を測定する測定装置において、
前記車両の後方あるいは側方にある対象物を認識する認識手段と、
認識された前記対象物を、前記車両に接近する対象物と、前記車両から離反する対象物とに判別する判別手段と、
接近離反の判別結果に基づいて、認識された前記対象物から、前記車両に接近すると判別された対象物のみを抽出する抽出手段と、
抽出された前記対象物との距離または相対速度の少なくとも一方を算出する算出手段と
を備える測定装置。
【請求項2】
前記送信信号は、第1の周波数を有する第1の送信信号と、第2の周波数を有する第2の送信信号を含み、
前記送信信号と前記反射信号とから生成される混合信号は、前記第1の送信信号を基に生成された第1のドップラ信号と前記第2の送信信号を基に生成された第2のドップラ信号を含み、
前記認識手段は、前記第1のドップラ信号と前記第2のドップラ信号とに対してFFT(Fast Fourier Transform)解析処理を施すことで得られたドップラ周波数に基づいて、前記車両の後方あるいは側方にある対象物を認識し、
前記判別手段は、前記FFT解析処理により得られた位相に基づいて、識別された前記対象物を、接近または離反の対象物に判別する
請求項1に記載の測定装置。
【請求項3】
前記算出手段は、前記FFT解析処理により得られたドップラ周波数または前記第1のドップラ信号と前記第2のドップラ信号の位相差に基づいて、前記距離または前記相対速度を算出する
請求項2に記載の測定装置。
【請求項4】
前記測定装置は、2周波CW(Continuous Wave)方式のレーダである
請求項3に記載の測定装置。
【請求項5】
前記算出手段による演算結果を、前記算出手段によって求められた演算結果を利用する所定の処理を行う情報処理装置に出力する出力手段をさらに備える
請求項1に記載の測定装置。
【請求項6】
前記算出手段よって求められた演算結果を利用する所定の処理を行う処理手段をさらに備える
請求項1に記載の測定装置。
【請求項7】
車両の後方または側方に設置され、所定の周波数にて送信された送信信号の対象物での反射信号を用いて、前記対象物を測定する測定装置の測定方法において、
前記車両の後方あるいは側方にある対象物を認識し、
認識された前記対象物を、前記車両に接近する対象物と、前記車両から離反する対象物とに判別し、
接近離反の判別結果に基づいて、認識された前記対象物から、前記車両に接近すると判別された対象物のみを抽出し、
抽出された前記対象物との距離または相対速度の少なくとも一方を算出する
ステップを含む測定方法。
【請求項1】
車両の後方または側方に設置され、所定の周波数にて送信された送信信号の対象物での反射信号を用いて、前記対象物を測定する測定装置において、
前記車両の後方あるいは側方にある対象物を認識する認識手段と、
認識された前記対象物を、前記車両に接近する対象物と、前記車両から離反する対象物とに判別する判別手段と、
接近離反の判別結果に基づいて、認識された前記対象物から、前記車両に接近すると判別された対象物のみを抽出する抽出手段と、
抽出された前記対象物との距離または相対速度の少なくとも一方を算出する算出手段と
を備える測定装置。
【請求項2】
前記送信信号は、第1の周波数を有する第1の送信信号と、第2の周波数を有する第2の送信信号を含み、
前記送信信号と前記反射信号とから生成される混合信号は、前記第1の送信信号を基に生成された第1のドップラ信号と前記第2の送信信号を基に生成された第2のドップラ信号を含み、
前記認識手段は、前記第1のドップラ信号と前記第2のドップラ信号とに対してFFT(Fast Fourier Transform)解析処理を施すことで得られたドップラ周波数に基づいて、前記車両の後方あるいは側方にある対象物を認識し、
前記判別手段は、前記FFT解析処理により得られた位相に基づいて、識別された前記対象物を、接近または離反の対象物に判別する
請求項1に記載の測定装置。
【請求項3】
前記算出手段は、前記FFT解析処理により得られたドップラ周波数または前記第1のドップラ信号と前記第2のドップラ信号の位相差に基づいて、前記距離または前記相対速度を算出する
請求項2に記載の測定装置。
【請求項4】
前記測定装置は、2周波CW(Continuous Wave)方式のレーダである
請求項3に記載の測定装置。
【請求項5】
前記算出手段による演算結果を、前記算出手段によって求められた演算結果を利用する所定の処理を行う情報処理装置に出力する出力手段をさらに備える
請求項1に記載の測定装置。
【請求項6】
前記算出手段よって求められた演算結果を利用する所定の処理を行う処理手段をさらに備える
請求項1に記載の測定装置。
【請求項7】
車両の後方または側方に設置され、所定の周波数にて送信された送信信号の対象物での反射信号を用いて、前記対象物を測定する測定装置の測定方法において、
前記車両の後方あるいは側方にある対象物を認識し、
認識された前記対象物を、前記車両に接近する対象物と、前記車両から離反する対象物とに判別し、
接近離反の判別結果に基づいて、認識された前記対象物から、前記車両に接近すると判別された対象物のみを抽出し、
抽出された前記対象物との距離または相対速度の少なくとも一方を算出する
ステップを含む測定方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−103565(P2009−103565A)
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願番号】特願2007−275156(P2007−275156)
【出願日】平成19年10月23日(2007.10.23)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
【公開日】平成21年5月14日(2009.5.14)
【国際特許分類】
【出願日】平成19年10月23日(2007.10.23)
【出願人】(000002945)オムロン株式会社 (3,542)
【Fターム(参考)】
[ Back to top ]