
測定装置及びセンサユニットの保持方法
【課題】ピペットの挿抜時に生じるセンサユニットの位置ズレを防止する。
【解決手段】センサユニット11が載置される載置台43には、基準面77aを持つ位置決め部材77と、押圧面81aを持つ押さえ部材81が設けられる。基準面77aは、載置面43aに向けて45度の角度で傾斜しており、プリズム23の凸部23bと当接する。押圧面81aは、前記基準面77aと対称をなす角度で傾斜している。押さえ部材81は、載置面43aと垂直なZ軸方向に昇降自在に設けられており、押さえ部材81が下降すると、押圧面81aとプリズム23の凸部23bとが当接し、これを押圧することにより、プリズム23の他方の凸部23bを基準面77aに押し付ける。これにより、プリズム23が、押圧面81aと基準面77aとによって挟み込まれて、Y軸方向の位置決めがなされるとともに、Z軸方向に作用する力によって、載置面43aに押し付けられる。
【解決手段】センサユニット11が載置される載置台43には、基準面77aを持つ位置決め部材77と、押圧面81aを持つ押さえ部材81が設けられる。基準面77aは、載置面43aに向けて45度の角度で傾斜しており、プリズム23の凸部23bと当接する。押圧面81aは、前記基準面77aと対称をなす角度で傾斜している。押さえ部材81は、載置面43aと垂直なZ軸方向に昇降自在に設けられており、押さえ部材81が下降すると、押圧面81aとプリズム23の凸部23bとが当接し、これを押圧することにより、プリズム23の他方の凸部23bを基準面77aに押し付ける。これにより、プリズム23が、押圧面81aと基準面77aとによって挟み込まれて、Y軸方向の位置決めがなされるとともに、Z軸方向に作用する力によって、載置面43aに押し付けられる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、光学ブロックを有するセンサユニットを用いて、試料の反応を光学的に測定する測定装置及びセンサユニットの保持方法に関するものである。
【背景技術】
【0002】
タンパク質やDNAなどの生化学物質間における相互作用の測定や、薬品のスクリーニングなどを行うために、光学的に試料の反応を測定する測定装置が知られている。
【0003】
このような測定装置の1つに、表面プラズモン共鳴(Surface Plasmon Resonance)現象を利用した測定装置(以下、SPR測定装置と称す)がある。なお、表面プラズモンとは、金属中の自由電子が集団的に振動することによって生じ、その金属の表面に沿って進む自由電子の粗密波である。
【0004】
例えば、特許文献1などで知られるKretschmann配置を採用したSPR測定装置では、光学ブロックとして透明な誘電体ブロック(以下、プリズムと称す)を使用し、このプリズム上に形成された金属膜の表面をセンサ面として、このセンサ面上で試料を反応させながら、プリズムを介してセンサ面の裏面側から全反射条件を満たすように金属膜を照射し、その反射光を測定している。
【0005】
全反射条件を満たすように金属膜に照射された光のうち、エバネッセント波と呼ばれるわずかな光は、反射せずに金属膜内を透過してセンサ面側に染み出す。この際、エバネッセント波の振動数と表面プラズモンの振動数とが一致するとSPRが発生し、反射光の強度を大きく減衰させる。また、この減衰が発生する光の入射角度(共鳴角)は、金属膜上の屈折率に応じて変化する。すなわち、SPR測定装置は、金属膜からの反射光を捉えて共鳴角を検出することにより、センサ面上の試料の反応状況を測定する。
【0006】
ところで、タンパク質やDNAなどの生体試料は、乾燥による変性や失活を防ぐため、生理的食塩水や純水、または各種のバッファ液などの溶媒に溶かされた試料溶液として扱われることが多い。特許文献1記載のSPR測定装置は、こうした生体試料の相互作用などを調べるものであり、センサ面の上には試料溶液を送液するための流路が設けられている。なお、この流路とプリズムは、装置本体に設けられた測定ステージに配置されており、ガラス基板上に金属膜を形成したチップ型のセンサユニットを測定ステージに装着することで、前述の測定が行われる。
【0007】
特許文献1では、ポンプやバルブなどに接続された配管(チューブ)を介して、試料溶液を保管する容器から直接流路に試料溶液を送り込むようにしているが、この方法では、配管内に付着した試料が後に注入する試料溶液中に混入してしまう、いわゆるコンタミネーションが生じやすいという問題があった。
【0008】
この問題を解決するため、本出願人は、先端に小孔が形成された略円錐筒状のピペットチップと、このピペットチップを着脱自在に保持するヘッド部とからなるピペットを用いて、容器に保管された試料溶液などの液体を流路に分注するSPR測定装置の開発を検討している。このSPR測定装置では、分注する液体毎にピペットチップを交換することで、流路に液体を送り込む際に生じるコンタミネーションを防止することができる。
【0009】
また、このSPR測定装置では、流路が形成された流路部材と、上面に金属膜が形成されたプリズムと、流路部材の底面とプリズムの上面とを接合させた状態(流路と金属膜とを対面させた状態)で保持する保持部材とからなるセンサユニットを用いている。流路は、流路部材を略U字状に刳り貫いて形成される送液管であり、その両端を流路部材の上面に露呈させている。また、流路の底部は開放されており、この底部が金属膜で塞がれる。これにより、流路に液体を送り込むことで流路内に位置した金属膜に液体を接触させることができる。ピペットで流路内に液体を送り込む際には、露呈した流路の端部にピペットの先端を挿し込み、吸引した液体を吐出することによって行われる。
【特許文献1】特許第3294605号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかしながら、ピペットを流路に挿し込む際や、挿し込まれたピペットを流路から引き抜く際に、ピペットからセンサユニットへ力が加わりセンサユニットを動かして、その姿勢変化や位置ズレを引き起こすという問題があった。SPRによる検出信号は、非常に微細なものであるため、センサユニットのわずかな姿勢変化や位置ズレも測定誤差の要因となってしまう。
【0011】
こうした問題は、センサユニットに複数個のセンサ面とそれぞれに対応する流路を設け、複数のセンサ面の試料の反応を同時に測定しようとする場合には、流路の数に応じて当然にピペットの本数も増えるので、ピペットの挿抜時にセンサユニットへ働く力がより大きくなるため、特に深刻である。
【0012】
本発明は、上記課題を鑑みてなされたものであって、その目的は、ピペット挿抜時に生じるセンサユニットの姿勢変化や位置ズレを防止することができる測定装置及びセンサユニットの保持方法を提供することである。
【課題を解決するための手段】
【0013】
本発明の測定装置は、上面に試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなるセンサユニットを用い、前記光学ブロックに光を照射してその反射光を受光することにより前記センサ面上の前記試料の反応を光学的に測定する測定装置において、前記光学ブロックの下面と当接して前記センサユニットが載置される載置面を持ち、前記センサユニットが着脱自在にセットされる測定ステージと、前記光学ブロックの両側面の下端にそれぞれ形成され前記載置面と略平行なY軸方向に突出した第1及び第2の各凸部を、両側から挟み込んで前記センサユニットを所定の姿勢に保持する光学ブロック保持機構とが設けられており、前記光学ブロック保持機構は、前記載置面の側端に固定され前記第1の凸部と当接して前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部と、前記第2の凸部と当接して押圧する押圧面を持ち、この押圧面によって前記基準面に前記第1の凸部を押し付ける押し付け位置と、この押し付け位置から退避して前記押し付けを解除する解除位置との間で変位自在な押さえ部とを備えていることを特徴とする。
【0014】
前記測定装置は、前記センサユニットの上方から前記Z軸方向に沿って前記流路部材にアクセスして先端が前記流路に挿抜されるピペットを持ち、このピペットによって前記流路内に前記試料溶液を注入する分注器を備えている。また、前記センサユニットには、その長手方向に沿って複数の前記センサ面とそれに対応する複数の流路が配列されており、これらの流路に対して、前記分注器に設けられた複数のピペットが同時にアクセスする。このような場合には、ピペットの挿抜時にセンサユニットに加わる力が大きいので、前記光学ブロック保持機構のように保持することで、センサユニットを安定した姿勢で確実に保持することができる。
【0015】
前記基準面の傾斜角は、20度〜70度の範囲であることが好ましい。また、前記押圧面は、前記載置面を挟んで前記基準面と対称をなす角度で傾斜していることが好ましい。
【0016】
前記押さえ部は、例えば、バネによって前記押し付け位置に向けて付勢されている。これによれば、バネの付勢力を調節することで、保持力を簡単に調節することができる。また、前記押さえ部は、前記光学ブロックの長手方向に沿って複数個配列されており、前記光学ブロックの長手方向の両端部付近に少なくとも1つずつ配置されることが好ましい。さらに、前記各押さえ部は、それぞれ独立に変位可能なことが好ましい。これにより、光学ブロックの係合面が平坦でない場合でも、保持力を分散させることができる。前記押さえ部は、例えば、前記Z軸方向に沿って昇降して前記押し付け位置と前記解除位置との間を変位する。
【0017】
前記押さえ部にはカムフォロワーが設けられており、前記押さえ部は、このカムフォロワーに対して原節となるカム面を持つカム部材によって駆動されることが好ましい。前記カム部材としては、例えば、軸の周面に前記カム面が形成されたカムシャフトを使用して、このカムシャフトを回転させることにより、前記押さえ部を変位させる。このカムシャフトには、例えば、軸の断面が略D字形状になるように軸の周面の一部をカットして前記カム面が形成される。
【0018】
また、前記カム部材としては、平面上に凸部を形成することによって前記カム面を形成したカムプレートを使用して、このカムプレートをスライドさせることにより、前記Z軸方向押さえ部を変位させるようにしてもよい。前記凸部は、例えば、断面が略くさび形状である。
【0019】
前記押さえ部が前記押し付け位置に達したときに、前記カム面と前記カムフォロワーとの間にクリアランスが確保されるように、前記カム面と前記カムフォロワーとを配置することが好ましい。これにより、押さえ部がバネ付勢されている場合には、その付勢力をロスなく保持力に変換することができる。
【0020】
前記カムフォロワーは、ボールベアリングであることが好ましい。これにより、カム面との摩擦が低減される。
【0021】
前記センサユニットは、例えば、前記Y軸方向及び前記Z軸方向のそれぞれと直交するX軸方向とその長手方向とを合わせて、前記X軸方向に沿って前記測定ステージへ搬送される。
【0022】
前記測定ステージへ進入した前記センサユニットと当接して前記X軸方向の位置を位置決めするストッパを前記載置面に設けることが好ましい。
【0023】
前記基準面は、前記測定ステージ内で前記センサユニットのX軸方向の進路を案内するガイド面として機能する。
【0024】
前記載置面上の前記センサユニットの上方から前記流路部材にアクセスして、その上面を押圧することにより、前記流路部材を前記光学ブロックに押し付ける流路押し付け機構を設けることが好ましい。
【0025】
前記流路押し付け機構は、例えば、前記流路部材を押し付ける押し付け位置と、この押し付け位置から上昇して退避する退避位置との間で移動自在な押圧部を備えていることが好ましい。前記押圧部は、前記流路部材の上面の全域を覆う大きさを持つ押圧プレートであり、この押圧プレートには、前記ピペットが挿通する挿通穴が形成されていることが好ましい。
【0026】
前記押圧プレートには、前記流路部材の上面と対向する押圧面に複数個のプランジャが設けられており、これらのプランジャを介して前記流路部材に押圧力を与えることが好ましい。また、前記複数個のプランジャは、前記押圧プレートの長手方向に沿って略等間隔で配置されていることが好ましい。前記プランジャは、ボールプランジャ又はスプリングプランジャであることが好ましい。
【0027】
前記押圧プレートは、前記プランジャと前記流路部材との間に薄板を挟んで前記流路部材を押圧することが好ましい。前記薄板は、前記押圧プレートに吊り下げられており、前記押圧プレートとともに昇降することが好ましい。
【0028】
前記光学ブロック保持機構による保持及び前記流路押し付け機構による押し付けは、前記測定ステージへの前記センサユニットの搬送が停止した後に開始されることが好ましい。
【0029】
前記光学ブロック保持機構が保持を開始した後、前記流路押し付け機構による押し付けが開始されることが好ましい。前記光学ブロック保持機構による保持を解除した後に、前記流路押し付け機構による押し付けを解除することが好ましい。
【0030】
本発明のセンサユニットの保持方法は、試料の反応を光学的に測定する測定装置に着脱自在にセットされ、上面に試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなるセンサユニットを、測定装置の測定ステージに保持するセンサユニットの保持方法において、前記光学ブロックには、その両側面の下端にそれぞれ形成され前記載置面と略平行なY軸方向に突出した第1及び第2の凸部が設けられており、この光学ブロックを下にして前記センサユニットを前記測定ステージの載置面にセットするセットステップと、前記載置面の側端に固定され前記第1の凸部と当接することにより前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部に対して、前記第2の凸部を押圧して前記第1の凸部を前記基準面に押し付けることにより前記各凸部を両側から挟み込む挟持ステップとからなることを特徴とする。
【0031】
前記載置面を挟んで前記基準面と対称をなす角度で傾斜した押圧面を持つ押さえ部によって、前記第2の凸部を押圧することが好ましい。
【発明の効果】
【0032】
本発明によれば、試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなり、前記光学ブロックの両側面の下端にそれぞれ形成された第1及び第2の凸部を持つセンサユニットを、この光学ブロックを下にして前記センサユニットを前記測定ステージの載置面にセットして、前記載置面の側端に固定され前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部に対して、前記第2の凸部を押圧して前記第1の凸部を前記基準面に押し付けることにより前記各凸部を両側から挟み込むようにしたから、ピペット挿抜時に生じるセンサユニットの姿勢変化や位置ズレを防止することができる。
【発明を実施するための最良の形態】
【0033】
図1に示すように、SPR測定装置10には、試料となるアナライトの反応を検知するためのセンサユニット11が着脱自在にセットされる。SPR装置10は、センサユニット11がセットされる測定ステージ14と、センサユニット11に光を照射してその反射光を受光することにより試料の反応を測定する測定部と、センサユニット11へ液体の注入と排出とを行うピペット16を複数本備えた分注ヘッド17とが設けられている。測定部は、光を照射する照明部18と、センサユニット11で反射した反射光を受光して測定信号(SPR信号)を出力する検出器19とからなる。
【0034】
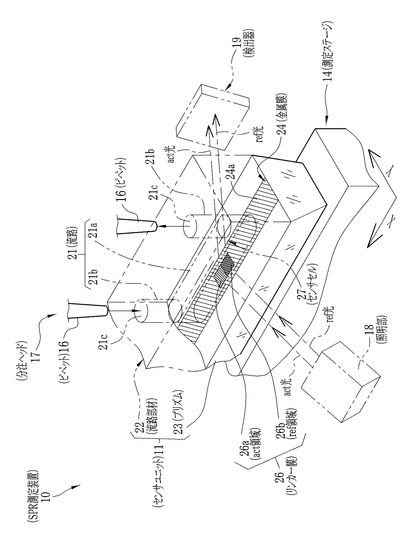
センサユニット11は、液体を送液する流路21が形成された流路部材22と、照明部18からの光が照射され、その光を反射して反射光を検出器19に出射する光学ブロックであるプリズム23とからなる。流路部材22の底面は、プリズム23の上面と対面して圧接される。流路21は、略U字形をした送液管であり、プリズム23の上面と対向して注入された液体をプリズム23の上面に沿って流す対向部分21aと、この対向部分21aの両端から流路部材22の上面に向けて流路部材22を縦方向に貫通する貫通部分21bとからなる。各貫通部分21bの上端には、それぞれピペット16の先端が挿入され液体の注入口及び排出口となる出入口21cが形成される。
【0035】
2本のピペット16は、一方が注入動作を行っているときには、他方が吸い出し動作を行うというように、互いに連動する。一方の出入口21cに挿入されたピペット16から注入された液体は、他方の出入口21cに挿入されたピペット16から排出される。
【0036】
流路21の管径は、例えば、約1mm程度であり、各出入口21cの間隔は、例えば、約10mm程度である。対向部分21aは、流路部材22の底面に形成された溝であり、その底面に圧接されるプリズム23の上面によってその開放部位が覆われる。流路部材22は、弾性部材で形成されており、圧接によって弾性変形して、開放部位が封止される。
【0037】
プリズム23には、その上面に、表面がセンサ面24aとなる金属膜24が蒸着によって形成される。この金属膜24は、短冊状をしており、流路部材22に形成された流路21と対向する位置に配置される。センサ面24a上には、リンカー膜26が形成される。リンカー膜26は、流路21へ注入されるアナライトと接触させるリガンドを固定するリガンド固定膜であり、センサユニット11の製造時に金属膜24上に製膜される。このリンカー膜26を含むセンサ面24aと、流路21とによってセンサセル27が構成される。
【0038】
リンカー膜26上には、リガンドが固定されアナライトとリガンドとの結合反応が生じる測定領域(act領域)26aと、リガンドが固定されず、前記測定領域の信号測定に際しての参照信号を得るための参照領域(ref領域)26bとが形成される。ref領域26bは、リンカー膜26を製膜する際に形成される。形成方法としては、例えば、リンカー膜26に対して表面処理を施して、リンカー膜26の半分程度の領域について、リガンドと結合する結合基を失活させる。これにより、リンカー膜26の半分がact領域26aとなり、残りの半分がref領域26bとなる。
【0039】
このリンカー膜26には、流路21を通じて、まず、リガンドを含むリガンド溶液が送液されて、act領域26aにリガンドが固定される。こうした固定処理は、センサユニット11を測定ステージ14にセットする前に行われる。アナライトとリガンドの結合反応は、リガンドを固定した後、流路21を通じて、アナライトを含むアナライト溶液がリンカー膜26に送液されて、アナライトが固定済みのリガンドと接触する。その際の測定信号を検出することによりリガンドとアナライトの結合反応が測定される。
【0040】
アナライトとリガンドの結合反応の測定処理では、まず、流路21へ測定用バッファ液が注入される。この後、アナライトを溶媒に溶かしたアナライト溶液を注入し、その後、再び測定用バッファ液が注入される。なお、最初に測定用バッファ液を注入する前に、いったん流路16の洗浄を行ってもよい。SPR信号の検出は、基準となる信号レベルを検出するために、最初に測定用バッファ液を注入した直後から開始され、アナライト溶液の注入後、再び測定用バッファ液が注入されるまでの間行われる。これにより、SPR信号の基準レベル(ベースライン)の検出、アナライトとリガンドの反応状況(結合状況)、測定用バッファ液の注入による結合したアナライトとリガンドとの脱離までのSPR信号を測定することができる。測定用バッファ及びアナライト溶液の注入及び排出は、ピペット16の流路21への挿抜を繰り返すことにより行われる。
【0041】
照明部18は、プリズム23を通じて、プリズム23と金属膜24との界面に向けて光を照射する。上述したとおり、リガンドとアナライトの反応状況は、共鳴角の変化として顕れるため、照明部26は、全反射条件を満足する様々な入射角の光ビームを界面に入射させる。照明部26は、光源と、光学系からなり、光源としては、例えば、LED(Light Emitting Diode),LD(Laser Diode),SLD(Super Luminescent Diode)などの発光素子が使用される。
【0042】
光学系は、光源が発光する光をコリメートするコリメータレンズ、このコリメータレンズから入力された平行光を発散光として出射する光ファイバー,この光ファイバーから出射する発散光を界面の特定位置に収束させる集光レンズなどからなる。これにより、様々な入射角の光ビームが界面に照射される。また、act領域26aとref領域26bには、それぞれの領域に光ビーム(act光及びref光)が照射されるが、act光及びref光は、例えば、1つの光源からの光を分光して生成される。もちろん、それぞれの光ビーム用の専用の光源を設けてもよい。
【0043】
検出器19は、例えば、CCDエリアセンサやフォトダイオードアレイからなり、界面で反射した反射光を受光してその反射光の光強度に応じたレベルの電気信号を測定信号として出力する。界面では、様々な入射角で入射した光ビームが反射するので、検出器19は、それらに対応する様々な反射角の光ビームを受光する。検出器19で出力された測定信号は、図示しないデータ解析装置に送信される。データ解析装置が測定信号に基づいてデータ処理を行うことで、光の減衰状況が解析されて、結合反応が調べられる。
【0044】
図2に示すように、センサユニット11は、長尺状をしており、6つのセンサセル27が設けられている。このように1つのユニットに複数のセンサセル27を設けることで、測定処理の処理効率を向上させている。というのは、1つのユニットに複数のセンサセル27を設けておけば、1つのユニットを測定ステージ14にセットした状態で、複数のセンサセル27に対する測定処理が可能となる。このため、1つのユニットに1つのセンサセル27が設けられている場合に比べて、測定ステージ14へのユニットの着脱動作が減るので測定処理の効率が向上する。なお、本例では、センサセル27の数を6つとしているが、その数は、6つ以外でもよく、これ以下でもこれ以上でもよい。
【0045】
SPR測定装置10は、測定ステージ14にセンサユニット11をセットした状態で、それら6つのセンサセル27に対して同時に測定処理を行う。照明部18は、各センサセル27に対して、測定用の光ビーム(act光及びref光)を同時に入力する。検出器19は、各センサセル27からの反射光を同時に受光して、センサセル27毎のSPR信号を出力する。
【0046】
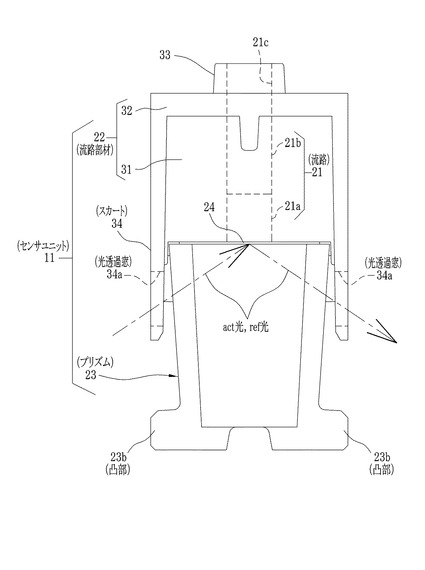
流路部材22は、断面が四角形の長尺の角柱状をしており、弾性部材で形成されている。流路部材22は、流路21が形成された本体部31と、この本体部31と一体成形されたカバー部32とからなる。本体部31には、6つの流路21が形成されており、それらは、本体部31の長手方向に沿って略等間隔で配置されている。この本体部31の底面がプリズム23の上面と圧接する。
【0047】
図3に示すように、カバー部32は、本体部31の上面及び両側面を覆うように略コの字状に形成されている。カバー部32の上面には、流路21の出入口21cが形成され、上方に突出した略円筒形状のボス33が形成されている。1つのセンサセル27は、2つの出入口21cを持っているので、カバー部32の上面には、合計12個のボス33が長手方向に沿って配列されている。分注ヘッド17には、センサセル27の数に応じて、2本1組のピペット16が6セット、合計12本のピペット16(図4参照)が設けられている。分注ヘッド17は、センサユニット11の上方から、これらのボス33にアクセスして、その先端が流路21の出入口21cに差し込まれる。
【0048】
カバー部32の両側端部には、それぞれ下方に延設されたスカート34が形成されている。スカート34は、プリズム23の両側面の上部を覆う。プリズム23の両側面の上部は光路となるので、そこに傷、埃、指紋などが付くと光の乱反射が生じて測定精度の悪化につながる。スカート34は、こうした傷、埃、指紋などがプリズム23に付かないように保護する。このスカート34には、各センサセル27に対する光路となる位置に、光透過窓34aが形成されており、その間には、プリズム23と係合するための係合穴34bが形成されている。
【0049】
プリズム23は、例えば、断面が台形の棒状をしている。プリズム23の素材としては、例えば、ホウケイクラウン(BK7)やバリウムクラウン(Bak4)などに代表される光学ガラスや、ポリメチルメタクリレート(PMMA)、ポリカーボネイト(PC)、非晶性ポリオレフィン(APO)などに代表される光学プラスチックなどが用いられる。金属膜24は、プリズム23の上面に長手方向に沿って細長く形成される。リンカー膜26は、各流路21の位置に対応して形成される。
【0050】
プリズム23の両側面には、流路部材22の係合穴34bと係合する係合突起23aが形成されている。係合突起23aは、各係合穴34bと対応する位置に配置される。この係合突起23aと係合穴34bとが係合して、プリズム23に流路部材22が取り付けられる。また、プリズム23には、その両側面の下端から略水平方向に突出した凸部23bが形成されている。各凸部23bは、プリズム23の長手方向に延びた長板状をしている。後述するように、SPR測定装置10には、センサユニット11を測定ステージ14の所定位置に保持するセンサユニット保持機構が設けられており、凸部23bは、このセンサユニット保持機構と係合する係合部として機能する。また、プリズム23の底面には、幅方向の中央に長手方向に延びた溝が形成されている。この溝は、センサユニット11を測定ステージ14に搬送する際に、SPR測定装置10に設けられた搬送レール(図示せず)と係合して、センサユニット11の進行方向をガイドする。
【0051】
図4において、SPR測定装置10は、装置各部を制御するコントローラ40を備えている。このコントローラ40によって、分注ヘッド17,ハンドリング機構,後述するセンサユニット保持機構などの動作及びそのタイミングが制御される。
【0052】
ハンドリング機構は、センサユニット11を測定ステージ14へ搬送する搬送機構である。ハンドリング機構は、ピペット16の流路21へのアクセス方向と平行なZ軸方向に対して垂直なX軸方向にセンサユニット11の長手方向を一致させて搬送する。ハンドリング機構は、センサユニット11の長手方向の両端部を挟み込んで把持する一対のアーム41aを有するハンドリングヘッド41を備えている。センサユニット11は、このハンドリングヘッド41に把持された状態で測定ステージ14まで搬送されてセットされ、その状態で測定処理が行われる。そして、測定処理が終了した後、ハンドリングヘッド41によって搬送されて測定ステージ14から退避する。
【0053】
測定ステージ14には、ステージ本体となる基台42と、この基台42に設けられ、センサユニット11を載置する長尺の載置面43aを持つ載置台43が設けられている。載置面43aには、センサユニット11の長手方向の端部と当接して、X軸方向の進入量を規制するストッパ44が設けられている。このストッパ44によって、センサユニット11のX軸方向の位置決めがなされる。また、基台42には、載置面43a上のセンサユニット11を所定の姿勢及び位置に保持する保持力を発生して、センサユニット11の位置ズレや姿勢変化を防ぐセンサユニット保持機構が設けられている。
【0054】
分注ヘッド17は、Z軸方向に沿って昇降して、ピペット16の流路21に対する挿抜を行うため、この挿抜時にセンサユニット11に対してZ軸方向の外力が作用する。こうしたZ軸方向の外力によってセンサユニット11の位置ズレや姿勢変化が生じると、測定精度が悪化するばかりでなく、測定終了後、センサユニット11を測定ステージ14から退避させる際のハンドリングにも影響を及ぼす。本例のSPR測定装置10は、複数のセンサセル27の測定を同時に行うために、複数のセンサセル27へのピペット16の挿抜も同時に行われるので、Z軸方向の外力は、センサセル27を1つずつ測定する場合と比べて、非常に大きくなる。そのため、その外力に抗するための十分な保持力が必要とされる。
【0055】
センサユニット保持機構は、プリズム23と係合してこれを押さえることによりセンサユニット11を所定の姿勢及び位置に保持するプリズム保持機構46と、流路部材22をZ軸方向から押圧することによりこれをプリズム23に押しつける流路押し付け機構47とからなる。プリズム保持機構46は、プリズム23の凸部23bと係合することにより、Z軸方向の保持力を発生して、プリズム23の底面を載置面43aに押さえつけるとともに、X軸及びZ軸のそれぞれと直交するY軸方向(プリズム23の幅方向)の保持力を発生して、プリズム23の幅方向の位置決めをする。
【0056】
コントローラ40は、センサユニット11が測定ステージ14に搬送された後、プリズム保持機構46を動作させて、プリズム23の保持を行い、プリズム23が保持された後に、流路押し付け機構47を動作させて、流路部材22の押し付けを行う。センサユニット11が測定ステージ14に送られた際には、例えば、センサユニット11がX軸回りに傾くなど、センサユニット11の姿勢が適正に保たれていないおそれがある。プリズム23の底面が載置面43aに対して傾いた状態で、流路部材22の押し付けを行うと、センサユニット11がさらに傾いてしまったり、ひどい場合には転倒してしまうおそれもある。そのため、プリズム23の保持を先に行って、センサユニット11の姿勢を適正な姿勢に矯正した後、流路押し付け機構47による押し付けを行うようにしている。
【0057】
また、コントローラ40は、測定が終了した後は、プリズム保持機構46による保持を解除した後に、流路押し付け機構47の押圧を解除する。後述するとおり、プリズム保持機構46による保持を解除する際には、センサユニット11をX軸回りに傾ける方向にプリズム23に力が働く。この力が作用する間、流路押し付け機構47による押圧を継続することで、センサユニット11の姿勢変化を防止するようにしている。
【0058】
プリズム保持機構46は、モータユニット51とカムシャフト52とからなる駆動機構によって駆動される。モータユニット51は、その回転力をカムシャフト52に伝達して、プリズム保持機構46を駆動する。カムシャフト52は、載置台43の下方部分に形成された軸受け部に回転自在に取り付けられる。
【0059】
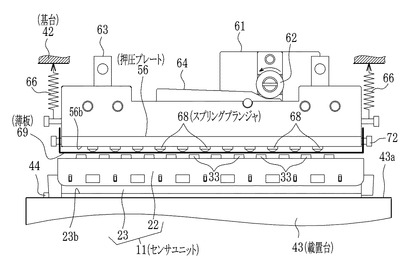
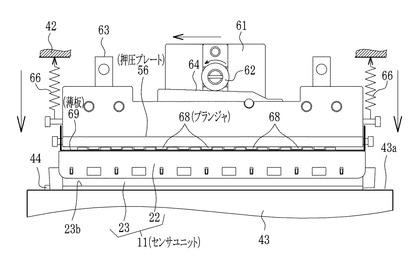
流路押し付け機構47は、流路部材22をZ軸方向に押圧することにより、流路部材22の底面をプリズム23の上面に押し付ける押圧プレート56を備えている。押圧プレート56は、Z軸方向に昇降自在に設けられており、流路部材22をプリズム23に押し付ける押し付け位置と、この押し付け位置から退避する退避位置との間で移動する。押圧プレート56は、流路部材22の上面の全域を覆う大きさを持っている。そのため、押圧プレート56には、ピペット16を挿通させる挿通穴56aが形成されており、この挿通穴56aを通じて、ピペット16が流路21へアクセスできるようにしている。
【0060】
押圧プレート56は、モータユニット58、伝達シャフト59,駆動部材61とからなる駆動機構によって駆動される。伝達シャフト59は、図示しないギヤトレインを介して、モータユニット58の回転力を駆動部材61に伝達する。駆動部材61は、その前面に後述するカム面64と係合するカムフォロワー62が取り付けられており、伝達シャフト59から回転力が伝達されると、このカムフォロワー62とともに水平方向(X軸方向)にスライドする。カムフォロワー62は、カム面64との摩擦抵抗を軽減するため、駆動部材61に回転自在に取り付けられている。
【0061】
押圧プレート56は、保持部材63によって保持される。保持部材63は、基台42に昇降自在に取り付けられており、押圧プレート56とともに昇降する。保持部材63と押圧プレート56は、押圧プレート56の両端部に取り付けられた引っ張りバネ66によって、上方向、すなわち、流路部材22から離れる方向に付勢されている。押圧プレート56は、この付勢により、初期状態では、上記退避位置に保たれる。
【0062】
図5及び図6に示すように、保持部材63には、カムフォロワー62と係合するカム面64が設けられている。カム面64は、引っ張りバネ66の付勢力によって、その上方のカムフォロワー62に押し当てられる。カム面64は傾斜面になっており、カムフォロワー62が水平方向にスライドすると、カム面64の傾斜分だけ保持部材63が昇降する。カム面64は、正面右方向から左方向に向かって高くなっているので、図6に示すように、カムフォロワー62が左方向にスライドすると、引っ張りバネ66の付勢力に抗して、保持部材63がZ軸方向に沿って押し下げられる。保持部材63の押し下げに伴って、押圧プレート56が押し付け位置へ移動する。他方、カムフォロワー62が右方向へスライドすると、引っ張りバネ66の付勢力によって保持部材63がZ軸方向に沿って上昇して、押圧プレート56が、図5に示す初期位置(退避位置)へ復帰する。
【0063】
押圧プレート56は、流路部材22の上面と対向する下面56bに複数のスプリングプランジャ68が設けられており、このスプリングプランジャ68と流路部材22との間に薄板69を挟み込んで流路部材22を押圧する。複数のスプリングプランジャ68は、押圧プレート56に形成された取り付け穴56cに嵌め込まれて、その下面56bから先端が突き出るように取り付けられる。各取り付け穴56cは、各挿入穴56aの配列方向に沿って、その両脇に2列に配列されている。これにより、各取り付け穴56cに取り付けられた複数のスプリングプランジャ68は、流路部材22の幅方向の両端部分と対向する。また、これら複数のスプリングプランジャ68の押圧力が長手方向に沿って均等に付与されるように、それらの配列間隔は、略等間隔にされている。
【0064】
スプリングプランジャ68は、周知のように、プランジャ本体と、このプランジャ本体を付勢するスプリングと、これらを収納してプランジャ本体をスプリングの付勢方向と平行に変位自在に保持する有底円筒状のケースとからなる。プランジャ本体は、初期位置ではスプリングの付勢によってケースから繰り出す方向に付勢されており、その先端はケースから突出している。プランジャ本体は、この初期位置からケース内に沈み込む沈胴方向へ所定のストロークの範囲で変位する。プランジャ本体は、例えば、略弾丸形状をしておいる。なお、スプリングプランジャの中には、このプランジャ本体の形状が球形のボールプランジャがあり、こうしたボールプランジャを使用してもよい。
【0065】
流路部材22の上面は、成型精度に起因して平坦度が低く、緩やかな歪みが生じる。そのため、押圧プレート56の下面56bを流路部材22の上面に直接接触させて押圧すると、歪みに応じて押圧力が一部に集中してしまうので、流路部材22に対して平均的に押圧力をかけることができない。そこで、各スプリングプランジャ68を介して流路部材22を押圧することで、プランジャ本体のストロークによって流路部材22の上面の歪みを吸収している。これにより、歪みに起因する押圧力の集中が防止されて、流路部材22の幅方向(短手方向)の両端部分が、長手方向に沿って平均的に押圧される。
【0066】
しかし、複数のスプリングプランジャ68を流路部材22に対して直接接触させると、各スプリングプランジャ68と流路部材22とが点接触になってしまうため、それぞれの押圧ポイントへの押圧力の集中が避けられない。そのため、スプリングプランジャ68と流路部材22との間に薄板69を挟み込んで押圧している。
【0067】
薄板69は、例えば、弾性を有する金属製の板である。この薄板69の下面を流路部材22の上面に接触させて、その薄板69の上面からプランジャ69によって流路部材22を押圧するため、各プランジャ69の押圧力を分散させることができる。こうすることで、流路部材22の上面の歪みを吸収しつつ、各スプリングプランジャ68の押圧ポイントへの押圧力を分散させて、流路部材22の長手方向に沿って均等な押圧が可能になる。
【0068】
図7に示すように、薄板69は、各スプリングプランジャ68と対向する両端部の間が長手方向に沿って細長い開口69aになっており、これにより、ピペット16の流路部材22へのアクセス経路が確保される。
【0069】
また、薄板69の長手方向の両端部は、押圧プレート56の両端部に向けて屈曲しており、この屈曲部分には矩形状の係合穴69bが形成されている。薄板69は、押圧プレート56が退避位置にあるときには、その係合穴69bが押圧プレート56の両端部に取り付けられるボルト72に引っ掛かり、押圧プレート56に吊り下げられる。これにより、薄板69は、押圧プレート56とともに昇降する。
【0070】
また、係合穴69bにボルト72を挿入した状態でも、薄板69が上下方向に変位できるように、係合穴69bは、ボルト72の直径よりも口径が大きな縦に長い長穴で形成されている。これにより、押圧プレート56が退避位置にあるとき(図5参照)と、押圧プレート56が押し付け位置にあるとき(図6参照)とで、薄板69と押圧プレート56の下面56bとの間隔が変化するので、薄板69によってスプリングプランジャ68の伸縮が阻害されることがない。
【0071】
すなわち、図5に示すように、押圧プレート56が退避位置にある状態では、薄板69は、ボルト72と係合して吊り下がるので、押圧プレート56の下面56bとの間隔が広がる。これにより、スプリングプランジャ68の先端の変位スペースが確保されるので、先端が薄板69に邪魔されることなく繰り出し方向へ変位して、沈胴方向へのストロークが確保される。この退避位置から押圧プレート56が押し付け位置に向けて下降を開始すると、まず、薄板69が流路部材22と当接する。この時点で薄板69の下降は終了するが、係合穴69bの大きさはボルト72の直径よりも大きいので、薄板69の変位が終了した後も、押圧プレート56は薄板69との間隔を狭めながら、下降を続ける。これに応じて、スプリングプランジャ68の先端がケース内に沈み込みながら薄板69を介して流路部材22を押圧する。
【0072】
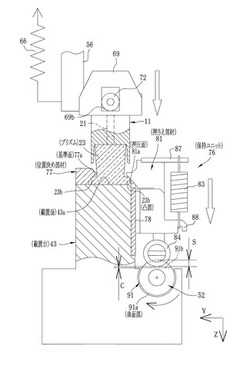
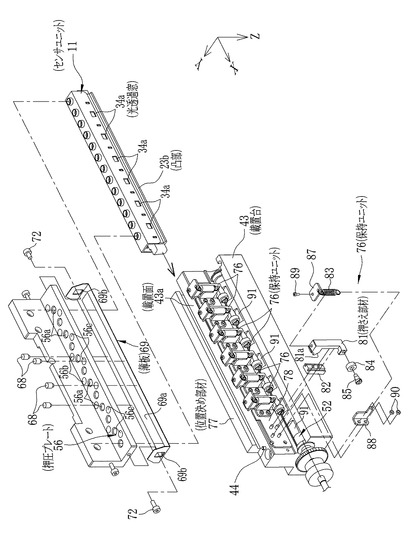
プリズム保持機構46は、載置面43aを挟んでその両脇にそれぞれ配置される保持ユニット76と、位置決め部材77とからなる。位置決め部材77は、プリズム23の側面と対面するように、載置面43aの一方の側端に固定されている。位置決め部材77には、プリズム23の一方の凸部23bと当接して、プリズム23のY軸方向の位置決めをする基準面77aが形成されている。位置決め部材77は、載置面43aの長手方向に沿って長尺状をしており、基準面77aは、センサユニット11がX軸方向に搬送される際に、プリズム23の凸部23bと当接して、センサユニット11の進行方向をガイドするガイドレールとして機能する。
【0073】
保持ユニット76は、位置決め部材77と対向する位置に配置されている。保持ユニット76は、プリズム23の他方の凸部23bと当接してこれを押圧することにより、プリズム23を前記位置決め部材77に押し付ける。こうしてプリズム23がその両側から挟み込まれることで、センサユニット11のY軸方向の位置決めがなされるとともに、載置面43aへ所定の姿勢で保持される。
【0074】
保持ユニット76は、複数個あり、載置面43aの長手方向に沿って略等間隔で配列されている。これらの保持ユニット76は、取り付けプレート78を介して載置台43の側面に取り付けられる。上述したとおり、センサユニット11には、6つのセンサセル27が設けられているので、各センサセル27に対する光路を確保するために、各保持ユニット76は、各光透過窓34aを避けるように、それらと対面しない位置に配置される。本例では、各保持ユニット76は、7個設けられており、各光透過窓34aの間に5つ、両端の各光透過窓34aの脇にそれぞれ1つずつ配置される。
【0075】
各保持ユニット76は、それぞれ独立に変位可能に設けられている。これにより、プリズム23の凸部23bに長手方向に歪みが生じている場合でも、上述したスプリングプランジャ68と同様に、各保持ユニット76が持つストロークによって歪みが吸収されるようにしている。各保持ユニット76の数は、7個でなくてもよく、少なくとも両端に1個ずつ合計2個あればよい。その数は、各光透過窓34aの数や、センサユニット11の長さなどを考慮して適宜決められる。
【0076】
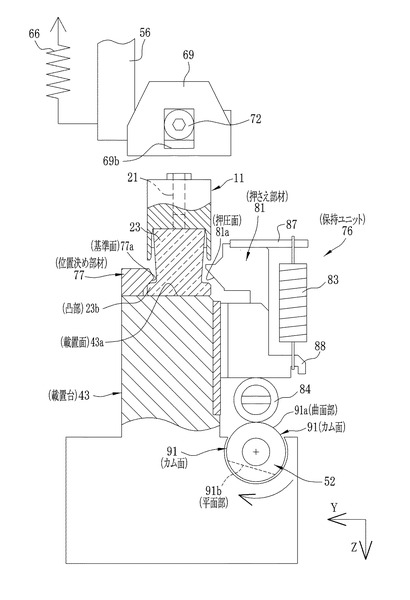
保持ユニット76は、凸部23bと当接して押圧する押圧面81aが上部に形成された押さえ部材81と、取り付けプレート78に取り付けられて固定され、この押さえ部材81をZ軸方向に昇降自在に保持する保持部材82と、押さえ部材81をZ軸方向の下方に向けて付勢するバネ83とを備えている。押さえ部材81は、押し付け位置と、この押し付け位置から上昇して押し付けを解除する解除位置との間で昇降する。
【0077】
押さえ部材81の下部には、カムシャフト52と接触するカムフォロワー84がボルト85によって取り付けられている。カムフォロワー84は、例えば、ボールベアリングが使用されており、その回転方向とカムシャフト52の回転方向とが一致する向きで取り付けられる。押さえ部材81は、保持部材82にリジッドに固定されているわけではなく、スライド自在に取り付けられるので、外力によって姿勢が変化しやすい。カムフォロワー84にボールベアリングを使用することで、カムシャフト52とカムフォロワー84との摩擦力が低減するため、カムシャフト52の回転につられて押さえ部材81の姿勢が変化することが抑えられる。これにより、押さえ部材81の押圧面81aとプリズム23の凸部23bとの適正な相対位置関係が保たれる。また、摩擦力が低減することにより、カムシャフト52の駆動トルクを軽減させることができる。
【0078】
バネ83は、留め金87に一端を引っ掛けて、他端を留め金88に引っ掛けて取り付けられる。留め金87は、押さえ部材81の上面にボルト89によって固定される。留め金88は、取り付けプレート78のボルトに挿通されナット90で締め付けられて固定される。
【0079】
カムシャフト52は、その軸の周面に複数のカム面91が形成されており、各カム面91は、複数の保持ユニット76のそれぞれのカムフォロワー84と対応する位置に配置されている。カム面91は、カムフォロワー84に対する原節となり、カムシャフト52が回転すると、各カム面91によって複数の保持ユニット76が駆動される。
【0080】
図8及び図9に示すように、カム面91は、軸の断面が略D字形になるように、軸の周面の一部をカットして形成されたものであり、Dカットカムなどと呼ばれる。なお、本例では、Dカットカムを使用しているが、Dカットカムでなくてもよく、軸の断面がおむすび形状のものなど他の形状のカムを使用してもよい。カム面91は、曲面部91aと平面部91bとからなる。このカム面91がカムフォロワー84と摺接して、各押さえ部材81をZ軸方向に変位させる。図8に示すように、曲面部91aとカムフォロワー84とが対向している間は、カム面91が、バネ83の付勢力に抗して、各押さえ部材81を解除位置に保つ。
【0081】
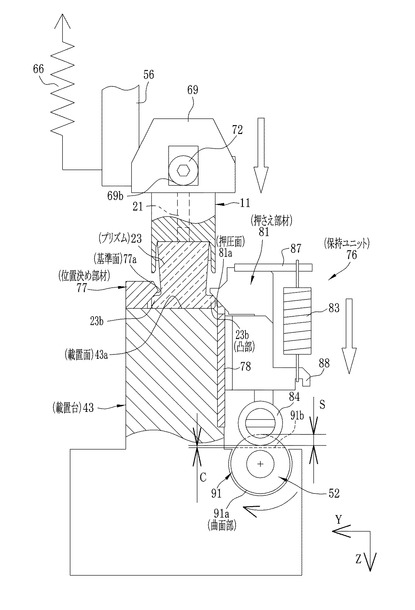
そして、カムシャフト52が時計方向に回転して、カム面91の平面部(カットされた部分)91bの一端とカムフォロワー84とが対向を開始すると、押さえ部材81は、バネ83の付勢力によってZ軸方向に沿って下降を開始する。そして、平面部91bが略水平状態になると、押さえ部材81が下限(押し付け位置)に達する。さらに、カムシャフト52が時計方向に回転すると、カムフォロワー84と曲面部91aとが対向して、押さえ部材81が図8に示す解除位置に復帰する。
【0082】
押し付け位置では、カムフォロワー84と平面部91bとが接触することがないように、両者の間にはクリアランスCが確保されている。これにより、押し付け位置では、押さえ部材81がバネ83に吊り下がる格好になるので、バネ83の付勢力を押圧力にロスなく変換できる。1つのバネ83の付勢力は、例えば、約500gfである。バネ83の付勢力によって押さえ部材81が変位するストローク量(解除位置と押し付け位置との距離)Sは、例えば、1.5mm程度である。クリアランスCは、例えば、0.2mm〜0.3mm程度である。
【0083】
位置決め部材77の基準面77aは、載置面43aに向けて傾斜している。そして、載置面43aを挟んで基準面77aと対向する対向位置には、押さえ部材81の押圧面81aが配置されており、この押圧面81は、それと基準面77aがハの字状に向き合うように、基準面77aと対称をなす角度で傾斜している。このため、押さえ部材81が下降して、プリズム23の一方の凸部23bと当接すると、プリズム23に対してY軸方向とZ軸方向の両方に作用する力が発生する。そして、Y軸方向に作用する力によって、プリズム23の他方の凸部23bが基準面77aに押し付けられて、Y軸方向の位置決めがなされる。また、この押し付けの反力によって、基準面77aからZ軸方向の力がプリズム23に作用して、その下面が載置面43aに押し付けられる。こうして、ハの字状に互いに向かい合う一対の斜面(基準面77aと押圧面81a)によってプリズム23が挟み込まれて、Y軸方向とZ軸方向の保持が行われる。
【0084】
また、センサユニット11は、ハンドリングヘッド41によって載置面43aに搬送されるが、この搬送直後において姿勢が傾いている場合がある。このような場合でも、基準面77aと押圧面81aとによって挟みこまれることで、プリズム23に対してY軸方向とZ軸方向の両方向の保持力が同時に作用するので、センサユニット11は、その姿勢が矯正されて適正な姿勢で保持される。
【0085】
基準面77aと押圧面81aの傾斜角(載置面との挟み角)は、それぞれ45度である。これにより、Y軸方向とZ軸方向に均等に力が分散する。もちろん、この傾斜角は一例であり、45度でなくてもよく、20度〜70度の範囲であればよい。好ましい範囲としては、30度〜60度の範囲であり、より好ましくは、40度〜50度の範囲である。また、基準面77aと押圧面81aのそれぞれの傾斜角は、必ずしも同じでなくてもよい。
【0086】
このようにセンサユニット保持機構は、流路押し付け機構47とプリズム保持機構46とによってセンサユニット11を保持する。流路押し付け機構47は、弾性を持ちプリズム23よりも軟質な流路部材22を介して押さえつけるため、流路押し付け機構47だけでは、ピペット16の挿抜によってセンサユニット11に加わる力が大きいと、流路部材22の変形によってセンサユニット11の姿勢変化や位置ズレが生じてしまうおそれがある。この流路押し付け機構47に加えて、流路部材22よりも硬質なプリズム23と直接係合するプリズム保持機構46によってセンサユニット11を保持するので、センサユニット11を確実に保持することができる。
【0087】
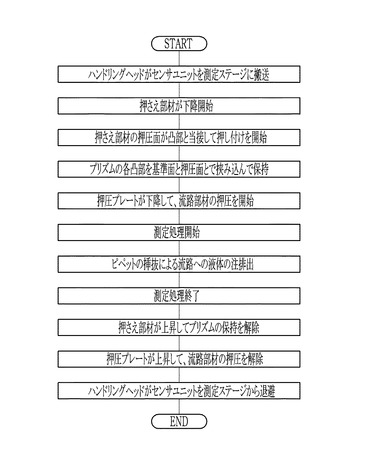
以下、上記構成による作用について、図10に示すフローチャートを参照しながら説明する。測定処理が未処理のセンサユニット11は、ハンドリングヘッド41によってX方向に搬送されて測定ステージ14にセットされる。測定ステージ14に進入したセンサユニット11は、片側の凸部23bが基準面77aに当接して進行方向がガイドされる。このセンサユニット11の搬送時には、プリズム保持機構46及び流路押し付け機構47は、図8に示す初期位置にあるので、押圧面81aとの摩擦がなく、センサユニット11はスムーズに搬送される。センサユニット11の端部がストッパ44に当接する位置まで送られると、X方向の搬送が停止する。
【0088】
コントローラ40は、センサユニット11が載置面43aにセットされた後、それぞれ図8に示す初期位置にある、プリズム保持機構46及び流路押し付け機構47を動作させて、センサユニット11を所定の位置及び姿勢に保持する。
【0089】
まず、コントローラ40は、モータユニット51を通じてカムシャフト52の回転を開始させて、押さえ部材81の駆動を開始する。カム面91が回転して、カムフォロワー84と曲面部91aとの接触が終了してカムフォロワー84と平面部91bとの接触が開始すると、押さえ部材81がバネ83の付勢力によって押し付け位置に向けて下降を開始する。カムフォロワー84にボールベアリングを使用しているので、カムフォロワー84とカム面91との摩擦抵抗が少なく、押さえ部材81が安定した姿勢で下降することができる。
【0090】
押さえ部材81がZ軸方向に下降を開始すると、押圧面81aがプリズム23の凸部23bの角と当接して、斜面の傾斜により、Y軸方向の押圧力を発生する。この押圧により、プリズム23の姿勢が矯正されながら、プリズム23の反対側の凸部23bが基準面77aに押し付けられて、Y軸方向の位置決めがなされる。そして、プリズム23は、押圧面81aと基準面77aとの1対の傾斜面によって両側から挟みこまれることで、Y軸方向とZ軸方向に保持される。
【0091】
こうして、プリズム保持機構46によるプリズム23の保持が完了した後、コントローラ40は、モータユニット58を回転させて、押圧プレート56を押し付け位置に向けて下降させる。押圧プレート56が下降すると、薄板69が流路部材22と当接して、流路部材22をプリズム23の上面に圧接させる。押圧プレート56は、複数のプランジャ68と薄板69とを介して流路部材22を押圧するので、流路部材22の上面を均等に押圧することができる。また、流路押し付け機構47による押圧は、プリズム保持機構46による保持が行われた後に行われるので、その押圧によって、センサユニット11が傾いたり、転倒するようなことはない。
【0092】
こうしてセンサユニット11が保持された後、測定処理が開始される。測定処理では、複数のピペット16が各流路21へ同時にアクセスして、各流路21へ液体の注排出を行い、各センサセル27のSPR信号が同時に検出される。複数のピペット16は同時に挿抜されるので、センサユニット11に対しては大きな力が働くが、流路押し付け機構47とプリズム保持機構46によってセンサユニット11を保持しているので、センサユニット11の姿勢変化や位置ズレが生じることはない。
【0093】
また、SPR信号の取得は、ピペット16が挿入される前から開始され、ピペット16が引き抜かれた後もしばらくの間継続する。この間、センサユニット11が適正な姿勢に保たれるので、精度の高い測定を行うことができる。
【0094】
測定処理が終了した後、コントローラ40は、まず、モータユニット51を回転させて、プリズム保持機構46の保持を解除する。この解除時には、流路押し付け機構47による押圧が継続しているので、プリズム保持機構46の解除時にセンサユニット11の姿勢が乱れることはない。プリズム保持機構46が解除された後、押圧プレート56が上昇して、流路押し付け機構47による押圧が解除される。この後、センサユニット11はハンドリングヘッド41によって搬送されて測定ステージ14から退避される。センサユニット11は、保持が解除された後も適正な姿勢が保たれるから、ハンドリングヘッド41によって確実に把持された状態が維持される。このため、搬送の際にセンサユニット11がハンドリングヘッド41から抜け落ちるなどの搬送不良が生じることもない。
【0095】
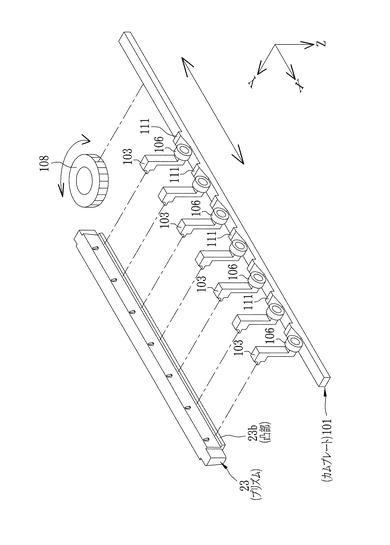
上記実施形態では、押さえ部材を駆動する駆動部材として、カムシャフトを使用した例で示したが、カムシャフトに代えて、図11及び図12に示すようなカムプレート101を使用してもよい。押さえ部材103は、プリズム23の側面に長手方向に沿って配列されており、上記位置決め部材77と対向して配置される。押さえ部材103の上部には、凸部23bと係合する舌片が形成されており、下部には、カムプレート101と係合するカムフォロワー106が設けられている。
【0096】
カムプレート101は、長手方向を押さえ部材103の配列方向に合わせて配置されており、長手方向と平行なX軸方向にスライドすることで、各押さえ部材103を駆動して、Z軸方向に昇降させる。カムプレート101の一方の端部には、ピニオンギヤ108と噛合するラックギヤ109が形成されている。ピニオンギヤ108が回転すると、カムプレート101は、X軸方向に沿ってスライドする。ピニオンギヤ108は、モータによって駆動される。カムプレート101には、各カムフォロワー106と接触するカム面111が形成されている。
【0097】
図12に示すように、カムプレート101には、カムフォロワー106に対応する位置に、断面が略くさび形状の複数の凸部が形成されており、この凸部の表面がカム面111となる。カム面111には、傾斜した斜面部と平らな平坦部とが形成されている。押さえ部材103は、バネ83によって下方に付勢されており、カム面111のスライドによって昇降する。二点鎖線で示すように、カム面111の平坦部とカムフォロワー106とが接しているときが、初期位置(解除位置)であり、この初期位置からカムプレート101が右方向にスライドすると、斜面部の傾斜に従って、押さえ部材103が押し付け位置に向けて下降する。そして、カムプレート101を右方向にスライドさせると、カム面111がバネ83の付勢に抗して押さえ部材103を押し上げて、押し付け位置から初期位置へ復帰させる。
【0098】
なお、押し付け位置において、押さえ部材103に対してバネ83の付勢力を100%かけるためには、上述したとおり、カムフォロワー106と、カム面111との間に、クリアランスが確保されるように、それぞれを配置するとよい。
【0099】
カムフォロワー106には、例えば、ボールベアリングが使用されており、その回転方向がカムプレート101のスライド方向に合う向きで取り付けられている。これにより、カムフォロワー106とカムプレート101との摩擦抵抗が減るため、押さえ部材103の姿勢安定化、及びカムプレート101の駆動力の軽減に寄与する。
【0100】
上述のカムシャフトを使用して駆動する場合と比較して、カムプレートを使用して押さえ部材を駆動する場合の方が、計算上では駆動力が低減する効果が認められている。具体的には、500gfの付勢力でバネ付勢された押さえ部材を、上述したストローク量で変位させるという条件の下では、カムプレートで駆動する場合の駆動力が、カムシャフトで駆動する場合の駆動力の半分程度で済むという計算結果が出ている。
【0101】
また、上記実施形態では、押さえ部材をZ軸方向に昇降させて、押し付け位置と解除位置との間で変位させる例で説明したが、Z軸方向でなくてもよく、Y軸方向に変位させてもよい。この場合には、押さえ部材は、横方向からプリズムの凸部と当接することになる。また、Z軸方向やY軸方向のスライドではなく、押さえ部材の下部を基点にしてこれを回転させることにより、押圧面を凸部に当てるようにしてもよい。
【0102】
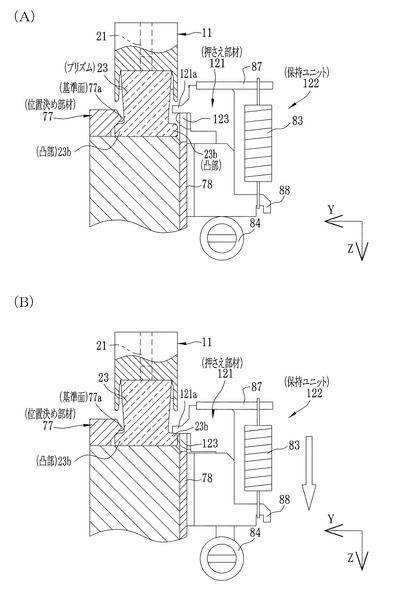
また、上記実施形態では、傾斜した基準面に対してプリズムを押し付ける押さえ部材に基準面と対称をなすように傾斜した押圧面を形成し、それら1対の傾斜面でプリズムを挟み込む例で説明したが、例えば、図13に示すように押さえ部材121を構成すれば、押圧部材に傾斜した押圧面を設けなくてもよい。なお、上記実施形態と同一の部材については便宜上同一の符合を付す。
【0103】
保持ユニット122には、上記実施形態の押さえ部材81に相当する押さえ部材121が設けられている。押さえ部材121には、凸部23の上面と当接してこれをZ軸方向に押圧する舌片121aと、この舌片121aの下方には、凸部23bの側面をY軸方向に押圧するY軸方向押圧部材としてボールプランジャ123が取り付けられている。この押さえ部材121をZ軸方向に下降させることにより、凸部23aに対してZ軸方向とY軸方向の2方向に押圧力を与えて、プリズム23の反対側の凸部23bを基準面77aに押し付けることができる。
【0104】
ボールプランジャ123は、上述したように、球形のプランジャ本体(ボール)を持ち、これを付勢するスプリングと、これらを収容するケースとからなる。プランジャ本体は、ボールの中心を回転中心として回転自在に保持される。
【0105】
ボールプランジャ123は、その可動部分であるボールが凸部23bの側面と対面する向きで、舌片121aの下方に形成された取り付け穴に埋め込まれるようにして取り付けられる。図13(A)に示すように、ボールプランジャ123は、押さえ部材121が解除位置にあるときには、ボールが、凸部23bの上方にわずかに突出するように配置される。
【0106】
そして、図13(B)に示すように、押さえ部材121が押し付け位置に向けて下降すると、まず、ボールは、凸部23bの角に当接し、さらに下降すると、凸部23bの形状に沿ってその周面と摺接しながらケース内に沈み込み、凸部23bの側面と当接する。これにより、ボールプランジャ123のスプリングの付勢力によってY軸方向の押圧を開始する。このように、押さえ部材121を構成すれば、Z軸方向の押圧力とY軸方向の押圧力を発生させることができるので、傾斜した押圧面と同様な効果が得られる。
【0107】
また、Y軸方向押さえ部材としてボールプランジャ123を使用したことで、ボールプランジャ123と凸部23bとが擦れて凸部23bが削られることが防止される。というのは、ボールは、凸部23bと摺接しながら変位するが、その摺接時には回転するため、凸部23bとボールとの摩擦抵抗が小さい。このため、凸部23bが削られにくく、削りかすなどの発生も抑えられる。なお、Y軸方向押さえ部材としてボールプランジャを使用することには、このようなメリットがあるが、Y軸方向押さえ部材として、ボールプランジャの代わりに、プランジャ本体が回転しないスプリングプランジャを使用してもよい。
【0108】
上記実施形態では、押さえ部材と係合させる部位を、プリズムの側面から突き出した凸部としているが、この凸部には、プリズムに溝を形成することに形成された凹凸も含まれる。また、上記実施形態では、プリズムの凸部が、略水平な上面とこれと直交する側面とを持つように断面が略矩形状をしているが、凸部の形状はこれに限られず、例えば、上面に傾斜がついていてもよいし、先端がドーム型になっていてもよい。
【0109】
また、上記実施形態では、測定装置の一例として全反射減衰を利用したSPR測定装置を例に説明したが、SPR測定装置に限らず他の測定装置に適用してもよい。全反射減衰を利用した測定装置としては、SPR測定装置の他に、例えば、漏洩モードセンサが知られている。漏洩モードセンサは、誘電体と、この上に順に層設されたクラッド層と光導波層とによって構成された薄膜とからなり、この薄膜の一方の面がセンサ面となり、他方の面が光入射面となる。光入射面に全反射条件を満たすように光を入射させると、その一部が前記クラッド層を透過して前記光導波層に取り込まれる。そして、この光導波層において、導波モードが励起されると、前記光入射面における反射光が大きく減衰する。導波モードが励起される入射角は、SPRの共鳴角と同様に、センサ面上の媒質の屈折率に応じて変化する。この反射角の減衰を検出することにより、前記センサ面上の化学反応が測定される。
【0110】
また、本発明は、全反射減衰を利用した測定装置に限らず、センサ面の反応を光学的に測定する他の測定装置にも適用することができる。測定装置の種類に応じて、光学ブロックの形状等も適宜変更される。例えば、光学ブロックとしてプリズムを例に説明したが、光学ブロックはプリズムでなくてもよく、プレート状のものでもよい。また、光学ブロックの材質は、プラスチックに限らずガラスでもよい。
【図面の簡単な説明】
【0111】
【図1】SPR測定方法の説明図である。
【図2】センサユニットの概略構成を示す分解斜視図である。
【図3】センサユニットの側面図である。
【図4】測定ステージの構成図である。
【図5】退避位置にある流路押し付け機構の説明図である。
【図6】押し付け位置にある流路押し付け機構の説明図である。
【図7】プリズム保持機構の構成図である。
【図8】解除位置にあるプリズム保持機構の説明図である。
【図9】押し付け位置にあるプリズム保持機構の説明図である。
【図10】保持及び解除手順を示すフローチャートである。
【図11】カムプレートを使用した押さえ部材の駆動機構の説明図である。
【図12】図11の駆動機構の側面図である。
【図13】押さえ部材にY軸方向押さえ部材を設けた例の説明図である。
【符号の説明】
【0112】
10 SPR測定装置
11 センサユニット
14 測定ステージ
16 ピペット
21 流路
22 流路部材
23 プリズム
23 凸部
43 載置台
43a 載置面
46 プリズム保持機構
47 流路押し付け機構
51 モータユニット
52 カムシャフト
56 押圧プレート
68 スプリングプランジャ
69 薄板
76 保持ユニット
77 位置決め部材
77a 基準面
78 取り付けプレート
81 押さえ部材
81a 押圧面
83 バネ
84,106 カムフォロワー
91 カム面
101 カムプレート
【技術分野】
【0001】
本発明は、光学ブロックを有するセンサユニットを用いて、試料の反応を光学的に測定する測定装置及びセンサユニットの保持方法に関するものである。
【背景技術】
【0002】
タンパク質やDNAなどの生化学物質間における相互作用の測定や、薬品のスクリーニングなどを行うために、光学的に試料の反応を測定する測定装置が知られている。
【0003】
このような測定装置の1つに、表面プラズモン共鳴(Surface Plasmon Resonance)現象を利用した測定装置(以下、SPR測定装置と称す)がある。なお、表面プラズモンとは、金属中の自由電子が集団的に振動することによって生じ、その金属の表面に沿って進む自由電子の粗密波である。
【0004】
例えば、特許文献1などで知られるKretschmann配置を採用したSPR測定装置では、光学ブロックとして透明な誘電体ブロック(以下、プリズムと称す)を使用し、このプリズム上に形成された金属膜の表面をセンサ面として、このセンサ面上で試料を反応させながら、プリズムを介してセンサ面の裏面側から全反射条件を満たすように金属膜を照射し、その反射光を測定している。
【0005】
全反射条件を満たすように金属膜に照射された光のうち、エバネッセント波と呼ばれるわずかな光は、反射せずに金属膜内を透過してセンサ面側に染み出す。この際、エバネッセント波の振動数と表面プラズモンの振動数とが一致するとSPRが発生し、反射光の強度を大きく減衰させる。また、この減衰が発生する光の入射角度(共鳴角)は、金属膜上の屈折率に応じて変化する。すなわち、SPR測定装置は、金属膜からの反射光を捉えて共鳴角を検出することにより、センサ面上の試料の反応状況を測定する。
【0006】
ところで、タンパク質やDNAなどの生体試料は、乾燥による変性や失活を防ぐため、生理的食塩水や純水、または各種のバッファ液などの溶媒に溶かされた試料溶液として扱われることが多い。特許文献1記載のSPR測定装置は、こうした生体試料の相互作用などを調べるものであり、センサ面の上には試料溶液を送液するための流路が設けられている。なお、この流路とプリズムは、装置本体に設けられた測定ステージに配置されており、ガラス基板上に金属膜を形成したチップ型のセンサユニットを測定ステージに装着することで、前述の測定が行われる。
【0007】
特許文献1では、ポンプやバルブなどに接続された配管(チューブ)を介して、試料溶液を保管する容器から直接流路に試料溶液を送り込むようにしているが、この方法では、配管内に付着した試料が後に注入する試料溶液中に混入してしまう、いわゆるコンタミネーションが生じやすいという問題があった。
【0008】
この問題を解決するため、本出願人は、先端に小孔が形成された略円錐筒状のピペットチップと、このピペットチップを着脱自在に保持するヘッド部とからなるピペットを用いて、容器に保管された試料溶液などの液体を流路に分注するSPR測定装置の開発を検討している。このSPR測定装置では、分注する液体毎にピペットチップを交換することで、流路に液体を送り込む際に生じるコンタミネーションを防止することができる。
【0009】
また、このSPR測定装置では、流路が形成された流路部材と、上面に金属膜が形成されたプリズムと、流路部材の底面とプリズムの上面とを接合させた状態(流路と金属膜とを対面させた状態)で保持する保持部材とからなるセンサユニットを用いている。流路は、流路部材を略U字状に刳り貫いて形成される送液管であり、その両端を流路部材の上面に露呈させている。また、流路の底部は開放されており、この底部が金属膜で塞がれる。これにより、流路に液体を送り込むことで流路内に位置した金属膜に液体を接触させることができる。ピペットで流路内に液体を送り込む際には、露呈した流路の端部にピペットの先端を挿し込み、吸引した液体を吐出することによって行われる。
【特許文献1】特許第3294605号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかしながら、ピペットを流路に挿し込む際や、挿し込まれたピペットを流路から引き抜く際に、ピペットからセンサユニットへ力が加わりセンサユニットを動かして、その姿勢変化や位置ズレを引き起こすという問題があった。SPRによる検出信号は、非常に微細なものであるため、センサユニットのわずかな姿勢変化や位置ズレも測定誤差の要因となってしまう。
【0011】
こうした問題は、センサユニットに複数個のセンサ面とそれぞれに対応する流路を設け、複数のセンサ面の試料の反応を同時に測定しようとする場合には、流路の数に応じて当然にピペットの本数も増えるので、ピペットの挿抜時にセンサユニットへ働く力がより大きくなるため、特に深刻である。
【0012】
本発明は、上記課題を鑑みてなされたものであって、その目的は、ピペット挿抜時に生じるセンサユニットの姿勢変化や位置ズレを防止することができる測定装置及びセンサユニットの保持方法を提供することである。
【課題を解決するための手段】
【0013】
本発明の測定装置は、上面に試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなるセンサユニットを用い、前記光学ブロックに光を照射してその反射光を受光することにより前記センサ面上の前記試料の反応を光学的に測定する測定装置において、前記光学ブロックの下面と当接して前記センサユニットが載置される載置面を持ち、前記センサユニットが着脱自在にセットされる測定ステージと、前記光学ブロックの両側面の下端にそれぞれ形成され前記載置面と略平行なY軸方向に突出した第1及び第2の各凸部を、両側から挟み込んで前記センサユニットを所定の姿勢に保持する光学ブロック保持機構とが設けられており、前記光学ブロック保持機構は、前記載置面の側端に固定され前記第1の凸部と当接して前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部と、前記第2の凸部と当接して押圧する押圧面を持ち、この押圧面によって前記基準面に前記第1の凸部を押し付ける押し付け位置と、この押し付け位置から退避して前記押し付けを解除する解除位置との間で変位自在な押さえ部とを備えていることを特徴とする。
【0014】
前記測定装置は、前記センサユニットの上方から前記Z軸方向に沿って前記流路部材にアクセスして先端が前記流路に挿抜されるピペットを持ち、このピペットによって前記流路内に前記試料溶液を注入する分注器を備えている。また、前記センサユニットには、その長手方向に沿って複数の前記センサ面とそれに対応する複数の流路が配列されており、これらの流路に対して、前記分注器に設けられた複数のピペットが同時にアクセスする。このような場合には、ピペットの挿抜時にセンサユニットに加わる力が大きいので、前記光学ブロック保持機構のように保持することで、センサユニットを安定した姿勢で確実に保持することができる。
【0015】
前記基準面の傾斜角は、20度〜70度の範囲であることが好ましい。また、前記押圧面は、前記載置面を挟んで前記基準面と対称をなす角度で傾斜していることが好ましい。
【0016】
前記押さえ部は、例えば、バネによって前記押し付け位置に向けて付勢されている。これによれば、バネの付勢力を調節することで、保持力を簡単に調節することができる。また、前記押さえ部は、前記光学ブロックの長手方向に沿って複数個配列されており、前記光学ブロックの長手方向の両端部付近に少なくとも1つずつ配置されることが好ましい。さらに、前記各押さえ部は、それぞれ独立に変位可能なことが好ましい。これにより、光学ブロックの係合面が平坦でない場合でも、保持力を分散させることができる。前記押さえ部は、例えば、前記Z軸方向に沿って昇降して前記押し付け位置と前記解除位置との間を変位する。
【0017】
前記押さえ部にはカムフォロワーが設けられており、前記押さえ部は、このカムフォロワーに対して原節となるカム面を持つカム部材によって駆動されることが好ましい。前記カム部材としては、例えば、軸の周面に前記カム面が形成されたカムシャフトを使用して、このカムシャフトを回転させることにより、前記押さえ部を変位させる。このカムシャフトには、例えば、軸の断面が略D字形状になるように軸の周面の一部をカットして前記カム面が形成される。
【0018】
また、前記カム部材としては、平面上に凸部を形成することによって前記カム面を形成したカムプレートを使用して、このカムプレートをスライドさせることにより、前記Z軸方向押さえ部を変位させるようにしてもよい。前記凸部は、例えば、断面が略くさび形状である。
【0019】
前記押さえ部が前記押し付け位置に達したときに、前記カム面と前記カムフォロワーとの間にクリアランスが確保されるように、前記カム面と前記カムフォロワーとを配置することが好ましい。これにより、押さえ部がバネ付勢されている場合には、その付勢力をロスなく保持力に変換することができる。
【0020】
前記カムフォロワーは、ボールベアリングであることが好ましい。これにより、カム面との摩擦が低減される。
【0021】
前記センサユニットは、例えば、前記Y軸方向及び前記Z軸方向のそれぞれと直交するX軸方向とその長手方向とを合わせて、前記X軸方向に沿って前記測定ステージへ搬送される。
【0022】
前記測定ステージへ進入した前記センサユニットと当接して前記X軸方向の位置を位置決めするストッパを前記載置面に設けることが好ましい。
【0023】
前記基準面は、前記測定ステージ内で前記センサユニットのX軸方向の進路を案内するガイド面として機能する。
【0024】
前記載置面上の前記センサユニットの上方から前記流路部材にアクセスして、その上面を押圧することにより、前記流路部材を前記光学ブロックに押し付ける流路押し付け機構を設けることが好ましい。
【0025】
前記流路押し付け機構は、例えば、前記流路部材を押し付ける押し付け位置と、この押し付け位置から上昇して退避する退避位置との間で移動自在な押圧部を備えていることが好ましい。前記押圧部は、前記流路部材の上面の全域を覆う大きさを持つ押圧プレートであり、この押圧プレートには、前記ピペットが挿通する挿通穴が形成されていることが好ましい。
【0026】
前記押圧プレートには、前記流路部材の上面と対向する押圧面に複数個のプランジャが設けられており、これらのプランジャを介して前記流路部材に押圧力を与えることが好ましい。また、前記複数個のプランジャは、前記押圧プレートの長手方向に沿って略等間隔で配置されていることが好ましい。前記プランジャは、ボールプランジャ又はスプリングプランジャであることが好ましい。
【0027】
前記押圧プレートは、前記プランジャと前記流路部材との間に薄板を挟んで前記流路部材を押圧することが好ましい。前記薄板は、前記押圧プレートに吊り下げられており、前記押圧プレートとともに昇降することが好ましい。
【0028】
前記光学ブロック保持機構による保持及び前記流路押し付け機構による押し付けは、前記測定ステージへの前記センサユニットの搬送が停止した後に開始されることが好ましい。
【0029】
前記光学ブロック保持機構が保持を開始した後、前記流路押し付け機構による押し付けが開始されることが好ましい。前記光学ブロック保持機構による保持を解除した後に、前記流路押し付け機構による押し付けを解除することが好ましい。
【0030】
本発明のセンサユニットの保持方法は、試料の反応を光学的に測定する測定装置に着脱自在にセットされ、上面に試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなるセンサユニットを、測定装置の測定ステージに保持するセンサユニットの保持方法において、前記光学ブロックには、その両側面の下端にそれぞれ形成され前記載置面と略平行なY軸方向に突出した第1及び第2の凸部が設けられており、この光学ブロックを下にして前記センサユニットを前記測定ステージの載置面にセットするセットステップと、前記載置面の側端に固定され前記第1の凸部と当接することにより前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部に対して、前記第2の凸部を押圧して前記第1の凸部を前記基準面に押し付けることにより前記各凸部を両側から挟み込む挟持ステップとからなることを特徴とする。
【0031】
前記載置面を挟んで前記基準面と対称をなす角度で傾斜した押圧面を持つ押さえ部によって、前記第2の凸部を押圧することが好ましい。
【発明の効果】
【0032】
本発明によれば、試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなり、前記光学ブロックの両側面の下端にそれぞれ形成された第1及び第2の凸部を持つセンサユニットを、この光学ブロックを下にして前記センサユニットを前記測定ステージの載置面にセットして、前記載置面の側端に固定され前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部に対して、前記第2の凸部を押圧して前記第1の凸部を前記基準面に押し付けることにより前記各凸部を両側から挟み込むようにしたから、ピペット挿抜時に生じるセンサユニットの姿勢変化や位置ズレを防止することができる。
【発明を実施するための最良の形態】
【0033】
図1に示すように、SPR測定装置10には、試料となるアナライトの反応を検知するためのセンサユニット11が着脱自在にセットされる。SPR装置10は、センサユニット11がセットされる測定ステージ14と、センサユニット11に光を照射してその反射光を受光することにより試料の反応を測定する測定部と、センサユニット11へ液体の注入と排出とを行うピペット16を複数本備えた分注ヘッド17とが設けられている。測定部は、光を照射する照明部18と、センサユニット11で反射した反射光を受光して測定信号(SPR信号)を出力する検出器19とからなる。
【0034】
センサユニット11は、液体を送液する流路21が形成された流路部材22と、照明部18からの光が照射され、その光を反射して反射光を検出器19に出射する光学ブロックであるプリズム23とからなる。流路部材22の底面は、プリズム23の上面と対面して圧接される。流路21は、略U字形をした送液管であり、プリズム23の上面と対向して注入された液体をプリズム23の上面に沿って流す対向部分21aと、この対向部分21aの両端から流路部材22の上面に向けて流路部材22を縦方向に貫通する貫通部分21bとからなる。各貫通部分21bの上端には、それぞれピペット16の先端が挿入され液体の注入口及び排出口となる出入口21cが形成される。
【0035】
2本のピペット16は、一方が注入動作を行っているときには、他方が吸い出し動作を行うというように、互いに連動する。一方の出入口21cに挿入されたピペット16から注入された液体は、他方の出入口21cに挿入されたピペット16から排出される。
【0036】
流路21の管径は、例えば、約1mm程度であり、各出入口21cの間隔は、例えば、約10mm程度である。対向部分21aは、流路部材22の底面に形成された溝であり、その底面に圧接されるプリズム23の上面によってその開放部位が覆われる。流路部材22は、弾性部材で形成されており、圧接によって弾性変形して、開放部位が封止される。
【0037】
プリズム23には、その上面に、表面がセンサ面24aとなる金属膜24が蒸着によって形成される。この金属膜24は、短冊状をしており、流路部材22に形成された流路21と対向する位置に配置される。センサ面24a上には、リンカー膜26が形成される。リンカー膜26は、流路21へ注入されるアナライトと接触させるリガンドを固定するリガンド固定膜であり、センサユニット11の製造時に金属膜24上に製膜される。このリンカー膜26を含むセンサ面24aと、流路21とによってセンサセル27が構成される。
【0038】
リンカー膜26上には、リガンドが固定されアナライトとリガンドとの結合反応が生じる測定領域(act領域)26aと、リガンドが固定されず、前記測定領域の信号測定に際しての参照信号を得るための参照領域(ref領域)26bとが形成される。ref領域26bは、リンカー膜26を製膜する際に形成される。形成方法としては、例えば、リンカー膜26に対して表面処理を施して、リンカー膜26の半分程度の領域について、リガンドと結合する結合基を失活させる。これにより、リンカー膜26の半分がact領域26aとなり、残りの半分がref領域26bとなる。
【0039】
このリンカー膜26には、流路21を通じて、まず、リガンドを含むリガンド溶液が送液されて、act領域26aにリガンドが固定される。こうした固定処理は、センサユニット11を測定ステージ14にセットする前に行われる。アナライトとリガンドの結合反応は、リガンドを固定した後、流路21を通じて、アナライトを含むアナライト溶液がリンカー膜26に送液されて、アナライトが固定済みのリガンドと接触する。その際の測定信号を検出することによりリガンドとアナライトの結合反応が測定される。
【0040】
アナライトとリガンドの結合反応の測定処理では、まず、流路21へ測定用バッファ液が注入される。この後、アナライトを溶媒に溶かしたアナライト溶液を注入し、その後、再び測定用バッファ液が注入される。なお、最初に測定用バッファ液を注入する前に、いったん流路16の洗浄を行ってもよい。SPR信号の検出は、基準となる信号レベルを検出するために、最初に測定用バッファ液を注入した直後から開始され、アナライト溶液の注入後、再び測定用バッファ液が注入されるまでの間行われる。これにより、SPR信号の基準レベル(ベースライン)の検出、アナライトとリガンドの反応状況(結合状況)、測定用バッファ液の注入による結合したアナライトとリガンドとの脱離までのSPR信号を測定することができる。測定用バッファ及びアナライト溶液の注入及び排出は、ピペット16の流路21への挿抜を繰り返すことにより行われる。
【0041】
照明部18は、プリズム23を通じて、プリズム23と金属膜24との界面に向けて光を照射する。上述したとおり、リガンドとアナライトの反応状況は、共鳴角の変化として顕れるため、照明部26は、全反射条件を満足する様々な入射角の光ビームを界面に入射させる。照明部26は、光源と、光学系からなり、光源としては、例えば、LED(Light Emitting Diode),LD(Laser Diode),SLD(Super Luminescent Diode)などの発光素子が使用される。
【0042】
光学系は、光源が発光する光をコリメートするコリメータレンズ、このコリメータレンズから入力された平行光を発散光として出射する光ファイバー,この光ファイバーから出射する発散光を界面の特定位置に収束させる集光レンズなどからなる。これにより、様々な入射角の光ビームが界面に照射される。また、act領域26aとref領域26bには、それぞれの領域に光ビーム(act光及びref光)が照射されるが、act光及びref光は、例えば、1つの光源からの光を分光して生成される。もちろん、それぞれの光ビーム用の専用の光源を設けてもよい。
【0043】
検出器19は、例えば、CCDエリアセンサやフォトダイオードアレイからなり、界面で反射した反射光を受光してその反射光の光強度に応じたレベルの電気信号を測定信号として出力する。界面では、様々な入射角で入射した光ビームが反射するので、検出器19は、それらに対応する様々な反射角の光ビームを受光する。検出器19で出力された測定信号は、図示しないデータ解析装置に送信される。データ解析装置が測定信号に基づいてデータ処理を行うことで、光の減衰状況が解析されて、結合反応が調べられる。
【0044】
図2に示すように、センサユニット11は、長尺状をしており、6つのセンサセル27が設けられている。このように1つのユニットに複数のセンサセル27を設けることで、測定処理の処理効率を向上させている。というのは、1つのユニットに複数のセンサセル27を設けておけば、1つのユニットを測定ステージ14にセットした状態で、複数のセンサセル27に対する測定処理が可能となる。このため、1つのユニットに1つのセンサセル27が設けられている場合に比べて、測定ステージ14へのユニットの着脱動作が減るので測定処理の効率が向上する。なお、本例では、センサセル27の数を6つとしているが、その数は、6つ以外でもよく、これ以下でもこれ以上でもよい。
【0045】
SPR測定装置10は、測定ステージ14にセンサユニット11をセットした状態で、それら6つのセンサセル27に対して同時に測定処理を行う。照明部18は、各センサセル27に対して、測定用の光ビーム(act光及びref光)を同時に入力する。検出器19は、各センサセル27からの反射光を同時に受光して、センサセル27毎のSPR信号を出力する。
【0046】
流路部材22は、断面が四角形の長尺の角柱状をしており、弾性部材で形成されている。流路部材22は、流路21が形成された本体部31と、この本体部31と一体成形されたカバー部32とからなる。本体部31には、6つの流路21が形成されており、それらは、本体部31の長手方向に沿って略等間隔で配置されている。この本体部31の底面がプリズム23の上面と圧接する。
【0047】
図3に示すように、カバー部32は、本体部31の上面及び両側面を覆うように略コの字状に形成されている。カバー部32の上面には、流路21の出入口21cが形成され、上方に突出した略円筒形状のボス33が形成されている。1つのセンサセル27は、2つの出入口21cを持っているので、カバー部32の上面には、合計12個のボス33が長手方向に沿って配列されている。分注ヘッド17には、センサセル27の数に応じて、2本1組のピペット16が6セット、合計12本のピペット16(図4参照)が設けられている。分注ヘッド17は、センサユニット11の上方から、これらのボス33にアクセスして、その先端が流路21の出入口21cに差し込まれる。
【0048】
カバー部32の両側端部には、それぞれ下方に延設されたスカート34が形成されている。スカート34は、プリズム23の両側面の上部を覆う。プリズム23の両側面の上部は光路となるので、そこに傷、埃、指紋などが付くと光の乱反射が生じて測定精度の悪化につながる。スカート34は、こうした傷、埃、指紋などがプリズム23に付かないように保護する。このスカート34には、各センサセル27に対する光路となる位置に、光透過窓34aが形成されており、その間には、プリズム23と係合するための係合穴34bが形成されている。
【0049】
プリズム23は、例えば、断面が台形の棒状をしている。プリズム23の素材としては、例えば、ホウケイクラウン(BK7)やバリウムクラウン(Bak4)などに代表される光学ガラスや、ポリメチルメタクリレート(PMMA)、ポリカーボネイト(PC)、非晶性ポリオレフィン(APO)などに代表される光学プラスチックなどが用いられる。金属膜24は、プリズム23の上面に長手方向に沿って細長く形成される。リンカー膜26は、各流路21の位置に対応して形成される。
【0050】
プリズム23の両側面には、流路部材22の係合穴34bと係合する係合突起23aが形成されている。係合突起23aは、各係合穴34bと対応する位置に配置される。この係合突起23aと係合穴34bとが係合して、プリズム23に流路部材22が取り付けられる。また、プリズム23には、その両側面の下端から略水平方向に突出した凸部23bが形成されている。各凸部23bは、プリズム23の長手方向に延びた長板状をしている。後述するように、SPR測定装置10には、センサユニット11を測定ステージ14の所定位置に保持するセンサユニット保持機構が設けられており、凸部23bは、このセンサユニット保持機構と係合する係合部として機能する。また、プリズム23の底面には、幅方向の中央に長手方向に延びた溝が形成されている。この溝は、センサユニット11を測定ステージ14に搬送する際に、SPR測定装置10に設けられた搬送レール(図示せず)と係合して、センサユニット11の進行方向をガイドする。
【0051】
図4において、SPR測定装置10は、装置各部を制御するコントローラ40を備えている。このコントローラ40によって、分注ヘッド17,ハンドリング機構,後述するセンサユニット保持機構などの動作及びそのタイミングが制御される。
【0052】
ハンドリング機構は、センサユニット11を測定ステージ14へ搬送する搬送機構である。ハンドリング機構は、ピペット16の流路21へのアクセス方向と平行なZ軸方向に対して垂直なX軸方向にセンサユニット11の長手方向を一致させて搬送する。ハンドリング機構は、センサユニット11の長手方向の両端部を挟み込んで把持する一対のアーム41aを有するハンドリングヘッド41を備えている。センサユニット11は、このハンドリングヘッド41に把持された状態で測定ステージ14まで搬送されてセットされ、その状態で測定処理が行われる。そして、測定処理が終了した後、ハンドリングヘッド41によって搬送されて測定ステージ14から退避する。
【0053】
測定ステージ14には、ステージ本体となる基台42と、この基台42に設けられ、センサユニット11を載置する長尺の載置面43aを持つ載置台43が設けられている。載置面43aには、センサユニット11の長手方向の端部と当接して、X軸方向の進入量を規制するストッパ44が設けられている。このストッパ44によって、センサユニット11のX軸方向の位置決めがなされる。また、基台42には、載置面43a上のセンサユニット11を所定の姿勢及び位置に保持する保持力を発生して、センサユニット11の位置ズレや姿勢変化を防ぐセンサユニット保持機構が設けられている。
【0054】
分注ヘッド17は、Z軸方向に沿って昇降して、ピペット16の流路21に対する挿抜を行うため、この挿抜時にセンサユニット11に対してZ軸方向の外力が作用する。こうしたZ軸方向の外力によってセンサユニット11の位置ズレや姿勢変化が生じると、測定精度が悪化するばかりでなく、測定終了後、センサユニット11を測定ステージ14から退避させる際のハンドリングにも影響を及ぼす。本例のSPR測定装置10は、複数のセンサセル27の測定を同時に行うために、複数のセンサセル27へのピペット16の挿抜も同時に行われるので、Z軸方向の外力は、センサセル27を1つずつ測定する場合と比べて、非常に大きくなる。そのため、その外力に抗するための十分な保持力が必要とされる。
【0055】
センサユニット保持機構は、プリズム23と係合してこれを押さえることによりセンサユニット11を所定の姿勢及び位置に保持するプリズム保持機構46と、流路部材22をZ軸方向から押圧することによりこれをプリズム23に押しつける流路押し付け機構47とからなる。プリズム保持機構46は、プリズム23の凸部23bと係合することにより、Z軸方向の保持力を発生して、プリズム23の底面を載置面43aに押さえつけるとともに、X軸及びZ軸のそれぞれと直交するY軸方向(プリズム23の幅方向)の保持力を発生して、プリズム23の幅方向の位置決めをする。
【0056】
コントローラ40は、センサユニット11が測定ステージ14に搬送された後、プリズム保持機構46を動作させて、プリズム23の保持を行い、プリズム23が保持された後に、流路押し付け機構47を動作させて、流路部材22の押し付けを行う。センサユニット11が測定ステージ14に送られた際には、例えば、センサユニット11がX軸回りに傾くなど、センサユニット11の姿勢が適正に保たれていないおそれがある。プリズム23の底面が載置面43aに対して傾いた状態で、流路部材22の押し付けを行うと、センサユニット11がさらに傾いてしまったり、ひどい場合には転倒してしまうおそれもある。そのため、プリズム23の保持を先に行って、センサユニット11の姿勢を適正な姿勢に矯正した後、流路押し付け機構47による押し付けを行うようにしている。
【0057】
また、コントローラ40は、測定が終了した後は、プリズム保持機構46による保持を解除した後に、流路押し付け機構47の押圧を解除する。後述するとおり、プリズム保持機構46による保持を解除する際には、センサユニット11をX軸回りに傾ける方向にプリズム23に力が働く。この力が作用する間、流路押し付け機構47による押圧を継続することで、センサユニット11の姿勢変化を防止するようにしている。
【0058】
プリズム保持機構46は、モータユニット51とカムシャフト52とからなる駆動機構によって駆動される。モータユニット51は、その回転力をカムシャフト52に伝達して、プリズム保持機構46を駆動する。カムシャフト52は、載置台43の下方部分に形成された軸受け部に回転自在に取り付けられる。
【0059】
流路押し付け機構47は、流路部材22をZ軸方向に押圧することにより、流路部材22の底面をプリズム23の上面に押し付ける押圧プレート56を備えている。押圧プレート56は、Z軸方向に昇降自在に設けられており、流路部材22をプリズム23に押し付ける押し付け位置と、この押し付け位置から退避する退避位置との間で移動する。押圧プレート56は、流路部材22の上面の全域を覆う大きさを持っている。そのため、押圧プレート56には、ピペット16を挿通させる挿通穴56aが形成されており、この挿通穴56aを通じて、ピペット16が流路21へアクセスできるようにしている。
【0060】
押圧プレート56は、モータユニット58、伝達シャフト59,駆動部材61とからなる駆動機構によって駆動される。伝達シャフト59は、図示しないギヤトレインを介して、モータユニット58の回転力を駆動部材61に伝達する。駆動部材61は、その前面に後述するカム面64と係合するカムフォロワー62が取り付けられており、伝達シャフト59から回転力が伝達されると、このカムフォロワー62とともに水平方向(X軸方向)にスライドする。カムフォロワー62は、カム面64との摩擦抵抗を軽減するため、駆動部材61に回転自在に取り付けられている。
【0061】
押圧プレート56は、保持部材63によって保持される。保持部材63は、基台42に昇降自在に取り付けられており、押圧プレート56とともに昇降する。保持部材63と押圧プレート56は、押圧プレート56の両端部に取り付けられた引っ張りバネ66によって、上方向、すなわち、流路部材22から離れる方向に付勢されている。押圧プレート56は、この付勢により、初期状態では、上記退避位置に保たれる。
【0062】
図5及び図6に示すように、保持部材63には、カムフォロワー62と係合するカム面64が設けられている。カム面64は、引っ張りバネ66の付勢力によって、その上方のカムフォロワー62に押し当てられる。カム面64は傾斜面になっており、カムフォロワー62が水平方向にスライドすると、カム面64の傾斜分だけ保持部材63が昇降する。カム面64は、正面右方向から左方向に向かって高くなっているので、図6に示すように、カムフォロワー62が左方向にスライドすると、引っ張りバネ66の付勢力に抗して、保持部材63がZ軸方向に沿って押し下げられる。保持部材63の押し下げに伴って、押圧プレート56が押し付け位置へ移動する。他方、カムフォロワー62が右方向へスライドすると、引っ張りバネ66の付勢力によって保持部材63がZ軸方向に沿って上昇して、押圧プレート56が、図5に示す初期位置(退避位置)へ復帰する。
【0063】
押圧プレート56は、流路部材22の上面と対向する下面56bに複数のスプリングプランジャ68が設けられており、このスプリングプランジャ68と流路部材22との間に薄板69を挟み込んで流路部材22を押圧する。複数のスプリングプランジャ68は、押圧プレート56に形成された取り付け穴56cに嵌め込まれて、その下面56bから先端が突き出るように取り付けられる。各取り付け穴56cは、各挿入穴56aの配列方向に沿って、その両脇に2列に配列されている。これにより、各取り付け穴56cに取り付けられた複数のスプリングプランジャ68は、流路部材22の幅方向の両端部分と対向する。また、これら複数のスプリングプランジャ68の押圧力が長手方向に沿って均等に付与されるように、それらの配列間隔は、略等間隔にされている。
【0064】
スプリングプランジャ68は、周知のように、プランジャ本体と、このプランジャ本体を付勢するスプリングと、これらを収納してプランジャ本体をスプリングの付勢方向と平行に変位自在に保持する有底円筒状のケースとからなる。プランジャ本体は、初期位置ではスプリングの付勢によってケースから繰り出す方向に付勢されており、その先端はケースから突出している。プランジャ本体は、この初期位置からケース内に沈み込む沈胴方向へ所定のストロークの範囲で変位する。プランジャ本体は、例えば、略弾丸形状をしておいる。なお、スプリングプランジャの中には、このプランジャ本体の形状が球形のボールプランジャがあり、こうしたボールプランジャを使用してもよい。
【0065】
流路部材22の上面は、成型精度に起因して平坦度が低く、緩やかな歪みが生じる。そのため、押圧プレート56の下面56bを流路部材22の上面に直接接触させて押圧すると、歪みに応じて押圧力が一部に集中してしまうので、流路部材22に対して平均的に押圧力をかけることができない。そこで、各スプリングプランジャ68を介して流路部材22を押圧することで、プランジャ本体のストロークによって流路部材22の上面の歪みを吸収している。これにより、歪みに起因する押圧力の集中が防止されて、流路部材22の幅方向(短手方向)の両端部分が、長手方向に沿って平均的に押圧される。
【0066】
しかし、複数のスプリングプランジャ68を流路部材22に対して直接接触させると、各スプリングプランジャ68と流路部材22とが点接触になってしまうため、それぞれの押圧ポイントへの押圧力の集中が避けられない。そのため、スプリングプランジャ68と流路部材22との間に薄板69を挟み込んで押圧している。
【0067】
薄板69は、例えば、弾性を有する金属製の板である。この薄板69の下面を流路部材22の上面に接触させて、その薄板69の上面からプランジャ69によって流路部材22を押圧するため、各プランジャ69の押圧力を分散させることができる。こうすることで、流路部材22の上面の歪みを吸収しつつ、各スプリングプランジャ68の押圧ポイントへの押圧力を分散させて、流路部材22の長手方向に沿って均等な押圧が可能になる。
【0068】
図7に示すように、薄板69は、各スプリングプランジャ68と対向する両端部の間が長手方向に沿って細長い開口69aになっており、これにより、ピペット16の流路部材22へのアクセス経路が確保される。
【0069】
また、薄板69の長手方向の両端部は、押圧プレート56の両端部に向けて屈曲しており、この屈曲部分には矩形状の係合穴69bが形成されている。薄板69は、押圧プレート56が退避位置にあるときには、その係合穴69bが押圧プレート56の両端部に取り付けられるボルト72に引っ掛かり、押圧プレート56に吊り下げられる。これにより、薄板69は、押圧プレート56とともに昇降する。
【0070】
また、係合穴69bにボルト72を挿入した状態でも、薄板69が上下方向に変位できるように、係合穴69bは、ボルト72の直径よりも口径が大きな縦に長い長穴で形成されている。これにより、押圧プレート56が退避位置にあるとき(図5参照)と、押圧プレート56が押し付け位置にあるとき(図6参照)とで、薄板69と押圧プレート56の下面56bとの間隔が変化するので、薄板69によってスプリングプランジャ68の伸縮が阻害されることがない。
【0071】
すなわち、図5に示すように、押圧プレート56が退避位置にある状態では、薄板69は、ボルト72と係合して吊り下がるので、押圧プレート56の下面56bとの間隔が広がる。これにより、スプリングプランジャ68の先端の変位スペースが確保されるので、先端が薄板69に邪魔されることなく繰り出し方向へ変位して、沈胴方向へのストロークが確保される。この退避位置から押圧プレート56が押し付け位置に向けて下降を開始すると、まず、薄板69が流路部材22と当接する。この時点で薄板69の下降は終了するが、係合穴69bの大きさはボルト72の直径よりも大きいので、薄板69の変位が終了した後も、押圧プレート56は薄板69との間隔を狭めながら、下降を続ける。これに応じて、スプリングプランジャ68の先端がケース内に沈み込みながら薄板69を介して流路部材22を押圧する。
【0072】
プリズム保持機構46は、載置面43aを挟んでその両脇にそれぞれ配置される保持ユニット76と、位置決め部材77とからなる。位置決め部材77は、プリズム23の側面と対面するように、載置面43aの一方の側端に固定されている。位置決め部材77には、プリズム23の一方の凸部23bと当接して、プリズム23のY軸方向の位置決めをする基準面77aが形成されている。位置決め部材77は、載置面43aの長手方向に沿って長尺状をしており、基準面77aは、センサユニット11がX軸方向に搬送される際に、プリズム23の凸部23bと当接して、センサユニット11の進行方向をガイドするガイドレールとして機能する。
【0073】
保持ユニット76は、位置決め部材77と対向する位置に配置されている。保持ユニット76は、プリズム23の他方の凸部23bと当接してこれを押圧することにより、プリズム23を前記位置決め部材77に押し付ける。こうしてプリズム23がその両側から挟み込まれることで、センサユニット11のY軸方向の位置決めがなされるとともに、載置面43aへ所定の姿勢で保持される。
【0074】
保持ユニット76は、複数個あり、載置面43aの長手方向に沿って略等間隔で配列されている。これらの保持ユニット76は、取り付けプレート78を介して載置台43の側面に取り付けられる。上述したとおり、センサユニット11には、6つのセンサセル27が設けられているので、各センサセル27に対する光路を確保するために、各保持ユニット76は、各光透過窓34aを避けるように、それらと対面しない位置に配置される。本例では、各保持ユニット76は、7個設けられており、各光透過窓34aの間に5つ、両端の各光透過窓34aの脇にそれぞれ1つずつ配置される。
【0075】
各保持ユニット76は、それぞれ独立に変位可能に設けられている。これにより、プリズム23の凸部23bに長手方向に歪みが生じている場合でも、上述したスプリングプランジャ68と同様に、各保持ユニット76が持つストロークによって歪みが吸収されるようにしている。各保持ユニット76の数は、7個でなくてもよく、少なくとも両端に1個ずつ合計2個あればよい。その数は、各光透過窓34aの数や、センサユニット11の長さなどを考慮して適宜決められる。
【0076】
保持ユニット76は、凸部23bと当接して押圧する押圧面81aが上部に形成された押さえ部材81と、取り付けプレート78に取り付けられて固定され、この押さえ部材81をZ軸方向に昇降自在に保持する保持部材82と、押さえ部材81をZ軸方向の下方に向けて付勢するバネ83とを備えている。押さえ部材81は、押し付け位置と、この押し付け位置から上昇して押し付けを解除する解除位置との間で昇降する。
【0077】
押さえ部材81の下部には、カムシャフト52と接触するカムフォロワー84がボルト85によって取り付けられている。カムフォロワー84は、例えば、ボールベアリングが使用されており、その回転方向とカムシャフト52の回転方向とが一致する向きで取り付けられる。押さえ部材81は、保持部材82にリジッドに固定されているわけではなく、スライド自在に取り付けられるので、外力によって姿勢が変化しやすい。カムフォロワー84にボールベアリングを使用することで、カムシャフト52とカムフォロワー84との摩擦力が低減するため、カムシャフト52の回転につられて押さえ部材81の姿勢が変化することが抑えられる。これにより、押さえ部材81の押圧面81aとプリズム23の凸部23bとの適正な相対位置関係が保たれる。また、摩擦力が低減することにより、カムシャフト52の駆動トルクを軽減させることができる。
【0078】
バネ83は、留め金87に一端を引っ掛けて、他端を留め金88に引っ掛けて取り付けられる。留め金87は、押さえ部材81の上面にボルト89によって固定される。留め金88は、取り付けプレート78のボルトに挿通されナット90で締め付けられて固定される。
【0079】
カムシャフト52は、その軸の周面に複数のカム面91が形成されており、各カム面91は、複数の保持ユニット76のそれぞれのカムフォロワー84と対応する位置に配置されている。カム面91は、カムフォロワー84に対する原節となり、カムシャフト52が回転すると、各カム面91によって複数の保持ユニット76が駆動される。
【0080】
図8及び図9に示すように、カム面91は、軸の断面が略D字形になるように、軸の周面の一部をカットして形成されたものであり、Dカットカムなどと呼ばれる。なお、本例では、Dカットカムを使用しているが、Dカットカムでなくてもよく、軸の断面がおむすび形状のものなど他の形状のカムを使用してもよい。カム面91は、曲面部91aと平面部91bとからなる。このカム面91がカムフォロワー84と摺接して、各押さえ部材81をZ軸方向に変位させる。図8に示すように、曲面部91aとカムフォロワー84とが対向している間は、カム面91が、バネ83の付勢力に抗して、各押さえ部材81を解除位置に保つ。
【0081】
そして、カムシャフト52が時計方向に回転して、カム面91の平面部(カットされた部分)91bの一端とカムフォロワー84とが対向を開始すると、押さえ部材81は、バネ83の付勢力によってZ軸方向に沿って下降を開始する。そして、平面部91bが略水平状態になると、押さえ部材81が下限(押し付け位置)に達する。さらに、カムシャフト52が時計方向に回転すると、カムフォロワー84と曲面部91aとが対向して、押さえ部材81が図8に示す解除位置に復帰する。
【0082】
押し付け位置では、カムフォロワー84と平面部91bとが接触することがないように、両者の間にはクリアランスCが確保されている。これにより、押し付け位置では、押さえ部材81がバネ83に吊り下がる格好になるので、バネ83の付勢力を押圧力にロスなく変換できる。1つのバネ83の付勢力は、例えば、約500gfである。バネ83の付勢力によって押さえ部材81が変位するストローク量(解除位置と押し付け位置との距離)Sは、例えば、1.5mm程度である。クリアランスCは、例えば、0.2mm〜0.3mm程度である。
【0083】
位置決め部材77の基準面77aは、載置面43aに向けて傾斜している。そして、載置面43aを挟んで基準面77aと対向する対向位置には、押さえ部材81の押圧面81aが配置されており、この押圧面81は、それと基準面77aがハの字状に向き合うように、基準面77aと対称をなす角度で傾斜している。このため、押さえ部材81が下降して、プリズム23の一方の凸部23bと当接すると、プリズム23に対してY軸方向とZ軸方向の両方に作用する力が発生する。そして、Y軸方向に作用する力によって、プリズム23の他方の凸部23bが基準面77aに押し付けられて、Y軸方向の位置決めがなされる。また、この押し付けの反力によって、基準面77aからZ軸方向の力がプリズム23に作用して、その下面が載置面43aに押し付けられる。こうして、ハの字状に互いに向かい合う一対の斜面(基準面77aと押圧面81a)によってプリズム23が挟み込まれて、Y軸方向とZ軸方向の保持が行われる。
【0084】
また、センサユニット11は、ハンドリングヘッド41によって載置面43aに搬送されるが、この搬送直後において姿勢が傾いている場合がある。このような場合でも、基準面77aと押圧面81aとによって挟みこまれることで、プリズム23に対してY軸方向とZ軸方向の両方向の保持力が同時に作用するので、センサユニット11は、その姿勢が矯正されて適正な姿勢で保持される。
【0085】
基準面77aと押圧面81aの傾斜角(載置面との挟み角)は、それぞれ45度である。これにより、Y軸方向とZ軸方向に均等に力が分散する。もちろん、この傾斜角は一例であり、45度でなくてもよく、20度〜70度の範囲であればよい。好ましい範囲としては、30度〜60度の範囲であり、より好ましくは、40度〜50度の範囲である。また、基準面77aと押圧面81aのそれぞれの傾斜角は、必ずしも同じでなくてもよい。
【0086】
このようにセンサユニット保持機構は、流路押し付け機構47とプリズム保持機構46とによってセンサユニット11を保持する。流路押し付け機構47は、弾性を持ちプリズム23よりも軟質な流路部材22を介して押さえつけるため、流路押し付け機構47だけでは、ピペット16の挿抜によってセンサユニット11に加わる力が大きいと、流路部材22の変形によってセンサユニット11の姿勢変化や位置ズレが生じてしまうおそれがある。この流路押し付け機構47に加えて、流路部材22よりも硬質なプリズム23と直接係合するプリズム保持機構46によってセンサユニット11を保持するので、センサユニット11を確実に保持することができる。
【0087】
以下、上記構成による作用について、図10に示すフローチャートを参照しながら説明する。測定処理が未処理のセンサユニット11は、ハンドリングヘッド41によってX方向に搬送されて測定ステージ14にセットされる。測定ステージ14に進入したセンサユニット11は、片側の凸部23bが基準面77aに当接して進行方向がガイドされる。このセンサユニット11の搬送時には、プリズム保持機構46及び流路押し付け機構47は、図8に示す初期位置にあるので、押圧面81aとの摩擦がなく、センサユニット11はスムーズに搬送される。センサユニット11の端部がストッパ44に当接する位置まで送られると、X方向の搬送が停止する。
【0088】
コントローラ40は、センサユニット11が載置面43aにセットされた後、それぞれ図8に示す初期位置にある、プリズム保持機構46及び流路押し付け機構47を動作させて、センサユニット11を所定の位置及び姿勢に保持する。
【0089】
まず、コントローラ40は、モータユニット51を通じてカムシャフト52の回転を開始させて、押さえ部材81の駆動を開始する。カム面91が回転して、カムフォロワー84と曲面部91aとの接触が終了してカムフォロワー84と平面部91bとの接触が開始すると、押さえ部材81がバネ83の付勢力によって押し付け位置に向けて下降を開始する。カムフォロワー84にボールベアリングを使用しているので、カムフォロワー84とカム面91との摩擦抵抗が少なく、押さえ部材81が安定した姿勢で下降することができる。
【0090】
押さえ部材81がZ軸方向に下降を開始すると、押圧面81aがプリズム23の凸部23bの角と当接して、斜面の傾斜により、Y軸方向の押圧力を発生する。この押圧により、プリズム23の姿勢が矯正されながら、プリズム23の反対側の凸部23bが基準面77aに押し付けられて、Y軸方向の位置決めがなされる。そして、プリズム23は、押圧面81aと基準面77aとの1対の傾斜面によって両側から挟みこまれることで、Y軸方向とZ軸方向に保持される。
【0091】
こうして、プリズム保持機構46によるプリズム23の保持が完了した後、コントローラ40は、モータユニット58を回転させて、押圧プレート56を押し付け位置に向けて下降させる。押圧プレート56が下降すると、薄板69が流路部材22と当接して、流路部材22をプリズム23の上面に圧接させる。押圧プレート56は、複数のプランジャ68と薄板69とを介して流路部材22を押圧するので、流路部材22の上面を均等に押圧することができる。また、流路押し付け機構47による押圧は、プリズム保持機構46による保持が行われた後に行われるので、その押圧によって、センサユニット11が傾いたり、転倒するようなことはない。
【0092】
こうしてセンサユニット11が保持された後、測定処理が開始される。測定処理では、複数のピペット16が各流路21へ同時にアクセスして、各流路21へ液体の注排出を行い、各センサセル27のSPR信号が同時に検出される。複数のピペット16は同時に挿抜されるので、センサユニット11に対しては大きな力が働くが、流路押し付け機構47とプリズム保持機構46によってセンサユニット11を保持しているので、センサユニット11の姿勢変化や位置ズレが生じることはない。
【0093】
また、SPR信号の取得は、ピペット16が挿入される前から開始され、ピペット16が引き抜かれた後もしばらくの間継続する。この間、センサユニット11が適正な姿勢に保たれるので、精度の高い測定を行うことができる。
【0094】
測定処理が終了した後、コントローラ40は、まず、モータユニット51を回転させて、プリズム保持機構46の保持を解除する。この解除時には、流路押し付け機構47による押圧が継続しているので、プリズム保持機構46の解除時にセンサユニット11の姿勢が乱れることはない。プリズム保持機構46が解除された後、押圧プレート56が上昇して、流路押し付け機構47による押圧が解除される。この後、センサユニット11はハンドリングヘッド41によって搬送されて測定ステージ14から退避される。センサユニット11は、保持が解除された後も適正な姿勢が保たれるから、ハンドリングヘッド41によって確実に把持された状態が維持される。このため、搬送の際にセンサユニット11がハンドリングヘッド41から抜け落ちるなどの搬送不良が生じることもない。
【0095】
上記実施形態では、押さえ部材を駆動する駆動部材として、カムシャフトを使用した例で示したが、カムシャフトに代えて、図11及び図12に示すようなカムプレート101を使用してもよい。押さえ部材103は、プリズム23の側面に長手方向に沿って配列されており、上記位置決め部材77と対向して配置される。押さえ部材103の上部には、凸部23bと係合する舌片が形成されており、下部には、カムプレート101と係合するカムフォロワー106が設けられている。
【0096】
カムプレート101は、長手方向を押さえ部材103の配列方向に合わせて配置されており、長手方向と平行なX軸方向にスライドすることで、各押さえ部材103を駆動して、Z軸方向に昇降させる。カムプレート101の一方の端部には、ピニオンギヤ108と噛合するラックギヤ109が形成されている。ピニオンギヤ108が回転すると、カムプレート101は、X軸方向に沿ってスライドする。ピニオンギヤ108は、モータによって駆動される。カムプレート101には、各カムフォロワー106と接触するカム面111が形成されている。
【0097】
図12に示すように、カムプレート101には、カムフォロワー106に対応する位置に、断面が略くさび形状の複数の凸部が形成されており、この凸部の表面がカム面111となる。カム面111には、傾斜した斜面部と平らな平坦部とが形成されている。押さえ部材103は、バネ83によって下方に付勢されており、カム面111のスライドによって昇降する。二点鎖線で示すように、カム面111の平坦部とカムフォロワー106とが接しているときが、初期位置(解除位置)であり、この初期位置からカムプレート101が右方向にスライドすると、斜面部の傾斜に従って、押さえ部材103が押し付け位置に向けて下降する。そして、カムプレート101を右方向にスライドさせると、カム面111がバネ83の付勢に抗して押さえ部材103を押し上げて、押し付け位置から初期位置へ復帰させる。
【0098】
なお、押し付け位置において、押さえ部材103に対してバネ83の付勢力を100%かけるためには、上述したとおり、カムフォロワー106と、カム面111との間に、クリアランスが確保されるように、それぞれを配置するとよい。
【0099】
カムフォロワー106には、例えば、ボールベアリングが使用されており、その回転方向がカムプレート101のスライド方向に合う向きで取り付けられている。これにより、カムフォロワー106とカムプレート101との摩擦抵抗が減るため、押さえ部材103の姿勢安定化、及びカムプレート101の駆動力の軽減に寄与する。
【0100】
上述のカムシャフトを使用して駆動する場合と比較して、カムプレートを使用して押さえ部材を駆動する場合の方が、計算上では駆動力が低減する効果が認められている。具体的には、500gfの付勢力でバネ付勢された押さえ部材を、上述したストローク量で変位させるという条件の下では、カムプレートで駆動する場合の駆動力が、カムシャフトで駆動する場合の駆動力の半分程度で済むという計算結果が出ている。
【0101】
また、上記実施形態では、押さえ部材をZ軸方向に昇降させて、押し付け位置と解除位置との間で変位させる例で説明したが、Z軸方向でなくてもよく、Y軸方向に変位させてもよい。この場合には、押さえ部材は、横方向からプリズムの凸部と当接することになる。また、Z軸方向やY軸方向のスライドではなく、押さえ部材の下部を基点にしてこれを回転させることにより、押圧面を凸部に当てるようにしてもよい。
【0102】
また、上記実施形態では、傾斜した基準面に対してプリズムを押し付ける押さえ部材に基準面と対称をなすように傾斜した押圧面を形成し、それら1対の傾斜面でプリズムを挟み込む例で説明したが、例えば、図13に示すように押さえ部材121を構成すれば、押圧部材に傾斜した押圧面を設けなくてもよい。なお、上記実施形態と同一の部材については便宜上同一の符合を付す。
【0103】
保持ユニット122には、上記実施形態の押さえ部材81に相当する押さえ部材121が設けられている。押さえ部材121には、凸部23の上面と当接してこれをZ軸方向に押圧する舌片121aと、この舌片121aの下方には、凸部23bの側面をY軸方向に押圧するY軸方向押圧部材としてボールプランジャ123が取り付けられている。この押さえ部材121をZ軸方向に下降させることにより、凸部23aに対してZ軸方向とY軸方向の2方向に押圧力を与えて、プリズム23の反対側の凸部23bを基準面77aに押し付けることができる。
【0104】
ボールプランジャ123は、上述したように、球形のプランジャ本体(ボール)を持ち、これを付勢するスプリングと、これらを収容するケースとからなる。プランジャ本体は、ボールの中心を回転中心として回転自在に保持される。
【0105】
ボールプランジャ123は、その可動部分であるボールが凸部23bの側面と対面する向きで、舌片121aの下方に形成された取り付け穴に埋め込まれるようにして取り付けられる。図13(A)に示すように、ボールプランジャ123は、押さえ部材121が解除位置にあるときには、ボールが、凸部23bの上方にわずかに突出するように配置される。
【0106】
そして、図13(B)に示すように、押さえ部材121が押し付け位置に向けて下降すると、まず、ボールは、凸部23bの角に当接し、さらに下降すると、凸部23bの形状に沿ってその周面と摺接しながらケース内に沈み込み、凸部23bの側面と当接する。これにより、ボールプランジャ123のスプリングの付勢力によってY軸方向の押圧を開始する。このように、押さえ部材121を構成すれば、Z軸方向の押圧力とY軸方向の押圧力を発生させることができるので、傾斜した押圧面と同様な効果が得られる。
【0107】
また、Y軸方向押さえ部材としてボールプランジャ123を使用したことで、ボールプランジャ123と凸部23bとが擦れて凸部23bが削られることが防止される。というのは、ボールは、凸部23bと摺接しながら変位するが、その摺接時には回転するため、凸部23bとボールとの摩擦抵抗が小さい。このため、凸部23bが削られにくく、削りかすなどの発生も抑えられる。なお、Y軸方向押さえ部材としてボールプランジャを使用することには、このようなメリットがあるが、Y軸方向押さえ部材として、ボールプランジャの代わりに、プランジャ本体が回転しないスプリングプランジャを使用してもよい。
【0108】
上記実施形態では、押さえ部材と係合させる部位を、プリズムの側面から突き出した凸部としているが、この凸部には、プリズムに溝を形成することに形成された凹凸も含まれる。また、上記実施形態では、プリズムの凸部が、略水平な上面とこれと直交する側面とを持つように断面が略矩形状をしているが、凸部の形状はこれに限られず、例えば、上面に傾斜がついていてもよいし、先端がドーム型になっていてもよい。
【0109】
また、上記実施形態では、測定装置の一例として全反射減衰を利用したSPR測定装置を例に説明したが、SPR測定装置に限らず他の測定装置に適用してもよい。全反射減衰を利用した測定装置としては、SPR測定装置の他に、例えば、漏洩モードセンサが知られている。漏洩モードセンサは、誘電体と、この上に順に層設されたクラッド層と光導波層とによって構成された薄膜とからなり、この薄膜の一方の面がセンサ面となり、他方の面が光入射面となる。光入射面に全反射条件を満たすように光を入射させると、その一部が前記クラッド層を透過して前記光導波層に取り込まれる。そして、この光導波層において、導波モードが励起されると、前記光入射面における反射光が大きく減衰する。導波モードが励起される入射角は、SPRの共鳴角と同様に、センサ面上の媒質の屈折率に応じて変化する。この反射角の減衰を検出することにより、前記センサ面上の化学反応が測定される。
【0110】
また、本発明は、全反射減衰を利用した測定装置に限らず、センサ面の反応を光学的に測定する他の測定装置にも適用することができる。測定装置の種類に応じて、光学ブロックの形状等も適宜変更される。例えば、光学ブロックとしてプリズムを例に説明したが、光学ブロックはプリズムでなくてもよく、プレート状のものでもよい。また、光学ブロックの材質は、プラスチックに限らずガラスでもよい。
【図面の簡単な説明】
【0111】
【図1】SPR測定方法の説明図である。
【図2】センサユニットの概略構成を示す分解斜視図である。
【図3】センサユニットの側面図である。
【図4】測定ステージの構成図である。
【図5】退避位置にある流路押し付け機構の説明図である。
【図6】押し付け位置にある流路押し付け機構の説明図である。
【図7】プリズム保持機構の構成図である。
【図8】解除位置にあるプリズム保持機構の説明図である。
【図9】押し付け位置にあるプリズム保持機構の説明図である。
【図10】保持及び解除手順を示すフローチャートである。
【図11】カムプレートを使用した押さえ部材の駆動機構の説明図である。
【図12】図11の駆動機構の側面図である。
【図13】押さえ部材にY軸方向押さえ部材を設けた例の説明図である。
【符号の説明】
【0112】
10 SPR測定装置
11 センサユニット
14 測定ステージ
16 ピペット
21 流路
22 流路部材
23 プリズム
23 凸部
43 載置台
43a 載置面
46 プリズム保持機構
47 流路押し付け機構
51 モータユニット
52 カムシャフト
56 押圧プレート
68 スプリングプランジャ
69 薄板
76 保持ユニット
77 位置決め部材
77a 基準面
78 取り付けプレート
81 押さえ部材
81a 押圧面
83 バネ
84,106 カムフォロワー
91 カム面
101 カムプレート
【特許請求の範囲】
【請求項1】
上面に試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなるセンサユニットを用い、前記光学ブロックに光を照射してその反射光を受光することにより前記センサ面上の前記試料の反応を光学的に測定する測定装置において、
前記光学ブロックの下面と当接して前記センサユニットが載置される載置面を持ち、前記センサユニットが着脱自在にセットされる測定ステージと、
前記光学ブロックの両側面の下端にそれぞれ形成され前記載置面と略平行なY軸方向に突出した第1及び第2の各凸部を、両側から挟み込んで前記センサユニットを所定の姿勢に保持する光学ブロック保持機構とが設けられており、
前記光学ブロック保持機構は、前記載置面の側端に固定され前記第1の凸部と当接して前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部と、
前記第2の凸部と当接して押圧する押圧面を持ち、この押圧面によって前記基準面に前記第1の凸部を押し付ける押し付け位置と、この押し付け位置から退避して前記押し付けを解除する解除位置との間で変位自在な押さえ部とを備えていることを特徴とする測定装置。
【請求項2】
前記基準面の傾斜角は、20度〜70度の範囲であることを特徴とする請求項1記載の測定装置。
【請求項3】
前記押圧面は、前記載置面を挟んで前記基準面と対称をなす角度で傾斜していることを特徴とする請求項1又は2記載の測定装置。
【請求項4】
前記センサユニットの上方から前記Z軸方向に沿って前記流路部材にアクセスして先端が前記流路に挿抜されるピペットを持ち、このピペットによって前記流路内に前記試料溶液を注入する分注器を備えていることを特徴とする請求項1〜3いずれか記載の測定装置。
【請求項5】
前記センサユニットには、その長手方向に沿って複数の前記センサ面とそれに対応する複数の流路が配列されており、これらの流路に対して、前記分注器に設けられた複数のピペットが同時にアクセスすることを特徴とする請求項4記載の測定装置。
【請求項6】
前記押さえ部は、バネによって前記押し付け位置に向けて付勢されていることを特徴とする請求項1〜5いずれか記載の測定装置。
【請求項7】
前記押さえ部は、前記光学ブロックの長手方向に沿って複数個配列されており、前記光学ブロックの長手方向の両端部付近に少なくとも1つずつ配置されることを特徴とする請求項1〜6いずれか記載の測定装置。
【請求項8】
前記各押さえ部は、それぞれ独立に変位可能なことを特徴とする請求項7記載の測定装置。
【請求項9】
前記押さえ部は、前記Z軸方向に沿って昇降して前記押し付け位置と前記解除位置との間を変位することを特徴とする請求項1〜8いずれか記載の測定装置。
【請求項10】
前記押さえ部にはカムフォロワーが設けられており、前記押さえ部は、このカムフォロワーに対して原節となるカム面を持つカム部材によって駆動されることを特徴とする請求項1〜9いずれか記載の測定装置。
【請求項11】
前記センサユニットは、前記Y軸方向及び前記Z軸方向のそれぞれと直交するX軸方向とその長手方向とを合わせて、前記X軸方向に沿って前記測定ステージへ搬送されることを特徴とする請求項1〜10いずれか記載の測定装置。
【請求項12】
前記基準面は、前記測定ステージ内で前記センサユニットのX軸方向の進路を案内するガイド面として機能することを特徴とする請求項1〜11いずれか記載の測定装置。
【請求項13】
前記載置面上の前記センサユニットの上方から前記流路部材にアクセスして、その上面を押圧することにより、前記流路部材を前記光学ブロックに押し付ける流路押し付け機構を設けたことを特徴とする請求項1〜12いずれか記載の測定装置。
【請求項14】
前記光学ブロック保持機構による保持及び前記流路押し付け機構による押し付けは、前記測定ステージへの前記センサユニットの搬送が停止した後に開始されることを特徴とする請求項13記載の測定装置。
【請求項15】
試料の反応を光学的に測定する測定装置に着脱自在にセットされ、上面に試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなるセンサユニットを、測定装置の測定ステージに保持するセンサユニットの保持方法において、
前記光学ブロックには、その両側面の下端にそれぞれ形成され前記載置面と略平行なY軸方向に突出した第1及び第2の凸部が設けられており、この光学ブロックを下にして前記センサユニットを前記測定ステージの載置面にセットするセットステップと、
前記載置面の側端に固定され前記第1の凸部と当接することにより前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部に対して、前記第2の凸部を押圧して前記第1の凸部を前記基準面に押し付けることにより前記各凸部を両側から挟み込む挟持ステップとからなることを特徴とするセンサユニットの保持方法。
【請求項16】
前記載置面を挟んで前記基準面と対称をなす角度で傾斜した押圧面を持つ押さえ部によって、前記第2の凸部を押圧することを特徴とする請求項15記載のセンサユニットの保持方法。
【請求項1】
上面に試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなるセンサユニットを用い、前記光学ブロックに光を照射してその反射光を受光することにより前記センサ面上の前記試料の反応を光学的に測定する測定装置において、
前記光学ブロックの下面と当接して前記センサユニットが載置される載置面を持ち、前記センサユニットが着脱自在にセットされる測定ステージと、
前記光学ブロックの両側面の下端にそれぞれ形成され前記載置面と略平行なY軸方向に突出した第1及び第2の各凸部を、両側から挟み込んで前記センサユニットを所定の姿勢に保持する光学ブロック保持機構とが設けられており、
前記光学ブロック保持機構は、前記載置面の側端に固定され前記第1の凸部と当接して前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部と、
前記第2の凸部と当接して押圧する押圧面を持ち、この押圧面によって前記基準面に前記第1の凸部を押し付ける押し付け位置と、この押し付け位置から退避して前記押し付けを解除する解除位置との間で変位自在な押さえ部とを備えていることを特徴とする測定装置。
【請求項2】
前記基準面の傾斜角は、20度〜70度の範囲であることを特徴とする請求項1記載の測定装置。
【請求項3】
前記押圧面は、前記載置面を挟んで前記基準面と対称をなす角度で傾斜していることを特徴とする請求項1又は2記載の測定装置。
【請求項4】
前記センサユニットの上方から前記Z軸方向に沿って前記流路部材にアクセスして先端が前記流路に挿抜されるピペットを持ち、このピペットによって前記流路内に前記試料溶液を注入する分注器を備えていることを特徴とする請求項1〜3いずれか記載の測定装置。
【請求項5】
前記センサユニットには、その長手方向に沿って複数の前記センサ面とそれに対応する複数の流路が配列されており、これらの流路に対して、前記分注器に設けられた複数のピペットが同時にアクセスすることを特徴とする請求項4記載の測定装置。
【請求項6】
前記押さえ部は、バネによって前記押し付け位置に向けて付勢されていることを特徴とする請求項1〜5いずれか記載の測定装置。
【請求項7】
前記押さえ部は、前記光学ブロックの長手方向に沿って複数個配列されており、前記光学ブロックの長手方向の両端部付近に少なくとも1つずつ配置されることを特徴とする請求項1〜6いずれか記載の測定装置。
【請求項8】
前記各押さえ部は、それぞれ独立に変位可能なことを特徴とする請求項7記載の測定装置。
【請求項9】
前記押さえ部は、前記Z軸方向に沿って昇降して前記押し付け位置と前記解除位置との間を変位することを特徴とする請求項1〜8いずれか記載の測定装置。
【請求項10】
前記押さえ部にはカムフォロワーが設けられており、前記押さえ部は、このカムフォロワーに対して原節となるカム面を持つカム部材によって駆動されることを特徴とする請求項1〜9いずれか記載の測定装置。
【請求項11】
前記センサユニットは、前記Y軸方向及び前記Z軸方向のそれぞれと直交するX軸方向とその長手方向とを合わせて、前記X軸方向に沿って前記測定ステージへ搬送されることを特徴とする請求項1〜10いずれか記載の測定装置。
【請求項12】
前記基準面は、前記測定ステージ内で前記センサユニットのX軸方向の進路を案内するガイド面として機能することを特徴とする請求項1〜11いずれか記載の測定装置。
【請求項13】
前記載置面上の前記センサユニットの上方から前記流路部材にアクセスして、その上面を押圧することにより、前記流路部材を前記光学ブロックに押し付ける流路押し付け機構を設けたことを特徴とする請求項1〜12いずれか記載の測定装置。
【請求項14】
前記光学ブロック保持機構による保持及び前記流路押し付け機構による押し付けは、前記測定ステージへの前記センサユニットの搬送が停止した後に開始されることを特徴とする請求項13記載の測定装置。
【請求項15】
試料の反応を光学的に測定する測定装置に着脱自在にセットされ、上面に試料の反応を検知するセンサ面が形成された光学ブロックと、前記上面に取り付けられ前記センサ面に前記試料を含む試料溶液を送液する流路が形成された流路部材とからなるセンサユニットを、測定装置の測定ステージに保持するセンサユニットの保持方法において、
前記光学ブロックには、その両側面の下端にそれぞれ形成され前記載置面と略平行なY軸方向に突出した第1及び第2の凸部が設けられており、この光学ブロックを下にして前記センサユニットを前記測定ステージの載置面にセットするセットステップと、
前記載置面の側端に固定され前記第1の凸部と当接することにより前記光学ブロックの前記Y軸方向を位置決めする基準面を持ち、この基準面が前記載置面に向けて傾斜した位置決め部に対して、前記第2の凸部を押圧して前記第1の凸部を前記基準面に押し付けることにより前記各凸部を両側から挟み込む挟持ステップとからなることを特徴とするセンサユニットの保持方法。
【請求項16】
前記載置面を挟んで前記基準面と対称をなす角度で傾斜した押圧面を持つ押さえ部によって、前記第2の凸部を押圧することを特徴とする請求項15記載のセンサユニットの保持方法。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2007−271361(P2007−271361A)
【公開日】平成19年10月18日(2007.10.18)
【国際特許分類】
【出願番号】特願2006−95184(P2006−95184)
【出願日】平成18年3月30日(2006.3.30)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
【公開日】平成19年10月18日(2007.10.18)
【国際特許分類】
【出願日】平成18年3月30日(2006.3.30)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【Fターム(参考)】
[ Back to top ]