
測定装置
【課題】測定すべき測定情報を推定するときに、測定情報に生じる誤差に関する情報を使用者に提供可能な測定装置を提供する。
【解決手段】観測手段12によって受信した電波信号に基づいて、測定すべき測定情報、たとえば電波信号の到来方位、発信源までの距離または発信源の位置を推定手段13によって推定し、表示手段14によって表示する。このとき、推定手段13によって推定された物理量に含まれる誤差を表す誤差情報を最大誤差評価手段11によって求め、表示手段14によって表示する。最大誤差評価手段11は、たとえば、推定手段13による物理量の推定に用いた推定モデルからの実際の観測量の誤差であるモデル誤差によって推定量に生じる推定誤差の最大値を求め、表示手段14によって表示させる。
【解決手段】観測手段12によって受信した電波信号に基づいて、測定すべき測定情報、たとえば電波信号の到来方位、発信源までの距離または発信源の位置を推定手段13によって推定し、表示手段14によって表示する。このとき、推定手段13によって推定された物理量に含まれる誤差を表す誤差情報を最大誤差評価手段11によって求め、表示手段14によって表示する。最大誤差評価手段11は、たとえば、推定手段13による物理量の推定に用いた推定モデルからの実際の観測量の誤差であるモデル誤差によって推定量に生じる推定誤差の最大値を求め、表示手段14によって表示させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、測定すべき測定情報を測定する測定装置に関し、より詳細には、電波信号を用いて、電波信号の発信源の方位、発信源までの距離および発信源の位置のうち、少なくとも1つを測定する測定装置に関する。
【背景技術】
【0002】
電波信号を用いて、電波信号の発信源の方位、発信源までの距離および発信源の位置のうち、少なくとも1つを測定する測定装置としては、非特許文献1に記載の測角装置、測距装置および測位装置が知られている。
【0003】
測角装置は、近接して配置された複数のアンテナを用いて電波信号を受信し、その受信信号から電波信号の到来方位を推定する。測距装置は、送信機から送信された電波信号または電波反射器で反射された反射波信号を受信し、その受信信号から送信機または電波反射器までの距離を測定する。測位装置としては、複数の測位手段を用いて電波発信機の位置を測定するもの、複数のアンテナを用いて、アンテナ間における電波信号の到来時刻の差を利用して電波発信機の位置を測定するもの、測距装置と測角装置とを組合せて電波発信機の位置を測定するもの、ならびに複数の測角装置を組合せて電波発信機の位置を測定するものが知られている。
【0004】
このような電波信号を用いて方位、距離および位置などを測定する測定装置では、観測量である受信信号に熱雑音が重畳し、測定結果に誤差をもたらす。そこで、電波信号を用いた測定装置では、熱雑音がガウス分布に従うことを利用し、複数回の観測を行い、それらの観測結果を総合することで、熱雑音による誤差を低減して、方位などの測定対象を推定する推定手段を設けている。
【0005】
たとえば特許文献1には、電波信号を用いた測角装置が開示されているが、この測角装置も、ガウス分布に従う雑音が観測信号に重畳していることを前提とし、そのような観測信号から電波信号の到来方位を推定する推定手段を有している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−361377号公報
【非特許文献】
【0007】
【非特許文献1】齋藤忠夫、立川敬二著、「新版 移動通信ハンドブック」、第1版、株式会社オーム社、2000年11月25日、p.507−509
【発明の概要】
【発明が解決しようとする課題】
【0008】
前述の特許文献1などに開示される推定手段を構成するためには、まず、観測量の統計的性質が、ある関数によって表現されることを仮定する。この関数は、推定したい量、つまり電波信号の発信源の方位、発信源までの距離、および発信源の位置などのうちの少なくともいずれか1つと、熱雑音との統計的性質を表現する確率変数から、観測量の統計的性質を表現する確率変数への関数である。この関数は、観測環境および観測装置をモデル化する関数であるので、以下の説明では「モデル関数」という。
【0009】
実際に観測された観測量の標本が、厳密にモデル関数で表されるような統計的性質を有しているならば、適切な観測手段を用いて十分に多数の標本を観測し、それらを総合して推定することによって、熱雑音による推定誤差を無視できるほどに小さくすることができることが知られている。電波信号を用いた測定装置は、この事実に基づいて、方位、距離および位置などの推定を行う。
【0010】
前記事実が成り立つためには、実際の観測環境および観測装置が厳密に、そのモデル関数に従うモデルである推定モデルと一致していなければならない。しかし空間を伝播する電波信号は、物体によって反射または回折を起こすので、アンテナは、発信源からの直接波のみを計測できるわけではない。また、高周波を扱う発信装置および受信装置を、厳密に、誤差を生じさせることなく製作することも困難である。つまり、実際の観測環境および観測装置は、推定モデルからの誤差を有し、その観測量には、モデル関数からの誤差であるモデル誤差が含まれる。
【0011】
従来の電波信号を用いた測定装置では、モデル誤差が無視し得るほど小さいことを暗黙の前提としている。この従来の電波信号を用いた測定装置では、モデル誤差がどの程度小さければ問題が無く、どの程度大きければ問題となるのかという情報は提供されない。また、予想されるモデル誤差がどの程度の推定誤差を生むのかに関する情報も提供されない。
【0012】
測定装置の使用者にとって、実際の観測環境および観測装置がどの程度のモデル誤差を有するのかは未知である。前述のように従来の電波信号を用いた測定装置では、モデル誤差およびそれによって生じる推定誤差に関する情報は提供されないので、測定装置の使用者が、推定された量がどの程度の誤差を有するのかについて知り得ないという問題がある。
【0013】
本発明の目的は、測定すべき測定情報を推定するときに、測定情報に生じる誤差に関する情報を使用者に提供可能な測定装置を提供することである。
【課題を解決するための手段】
【0014】
本発明の測定装置は、測定すべき測定情報に関係する関係情報を取得する取得手段と、前記取得手段によって取得された前記関係情報に基づいて、前記測定情報を推定する推定手段と、前記推定手段によって推定された前記測定情報に含まれる誤差を表す誤差情報を求める誤差評価手段と、前記推定手段によって推定された前記測定情報、および前記誤差評価手段によって求められた前記誤差情報を表示する表示手段とを備えることを特徴とする。
【発明の効果】
【0015】
本発明の測定装置によれば、測定すべき測定情報に関係する関係情報が取得手段によって取得され、取得された関係情報に基づいて、測定情報が推定手段によって推定される。また推定された測定情報に含まれる誤差を表す誤差情報が誤差評価手段によって求められる。推定手段によって推定された測定情報、および誤差評価手段によって求められた誤差情報が、表示手段によって表示される。これによって、測定情報を推定手段で推定するときに、測定情報に生じる誤差に関する誤差情報を使用者に提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施の形態である測定装置1の構成を示すブロック図である。
【図2】本発明の第4の実施の形態である測距装置21を含む測距システム20の構成を模式的に示す図である。
【図3】観測手段12の構成を示すブロック図である。
【図4】本発明の第6の実施の形態である測位装置41を含む測位システム40の構成を模式的に示す図である。
【図5】本発明の第9の実施の形態である測位装置51を含む測位システム50の構成を模式的に示す図である。
【図6】本発明の第12の実施の形態である測角装置61の構成を模式的に示す図である。
【図7】本発明の第14の実施の形態である測位装置71を含む測位システム70の構成を模式的に示す図である。
【図8】本発明の第16の実施の形態であるに測位装置81を含む測位システム80の構成を模式的に示す図である。
【発明を実施するための形態】
【0017】
<第1の実施の形態>
図1は、本発明の第1の実施の形態である測定装置1の構成を示すブロック図である。測定装置1は、測定すべき測定情報を測定する。測定情報は、たとえば距離などの物理量である。本実施の形態において測定装置1は、電波信号を用いて、その電波信号の発信源に関する物理量を測定情報として測定する。本実施の形態では、測定装置1は、電波信号の発信源の方位、発信源までの距離および発信源の位置のうちの少なくともいずれか1つを測定する。以下では、電波信号の発信源の方位を、電波信号の到来方位という場合がある。
【0018】
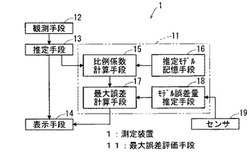
測定装置1は、最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。最大誤差評価手段11は、誤差評価手段に相当する。観測手段12は、取得手段に相当する。測定装置1は、たとえば測角装置、測距装置または測位装置として使用される。本実施の形態の測定装置1を適用した測角装置、測距装置および測位装置については、それぞれ後述の実施の形態で説明する。
【0019】
観測手段12は、測定情報に関係する関係情報を取得する。本実施の形態では、観測手段12は、電波信号を受信する受信手段によって実現され、電波信号を観測する。観測手段12は、受信した電波信号から関係情報を取得する。本実施の形態では、測定情報として、電波信号の発信源の方位、発信源までの距離および発信源の位置のうち、少なくともいずれか1つが測定されるので、関係情報としては、たとえば電波信号の発信源からの到達時間、複数の発信源から到来した電波信号間の位相差などが取得される。観測手段12によって観測された電波信号は、推定手段13で処理される。
【0020】
推定手段13は、観測手段12によって取得された関係情報に基づいて、測定情報を推定する。より詳細には、推定手段13は、関係情報をモデル化して表すモデル関数を用いて、測定情報を推定する。モデル関数に従うモデルを「推定モデル」という。本実施の形態では、推定手段13は、観測手段12によって観測された電波信号を処理することによって、電波信号の発信源に関する物理量を測定情報として推定する。具体的には、推定手段13は、電波信号の発信源の方位、発信源までの距離および発信源の位置のうち、少なくともいずれか1つを測定情報として推定する。以下、推定手段13によって推定された測定情報を「推定量」という場合がある。
【0021】
推定手段13によって推定された測定情報、すなわち方位、距離および位置などの推定量は、表示手段14によって表示される。表示手段14は、推定手段13によって推定された推定量を表示することによって、測定装置1の使用者に提供する。
【0022】
最大誤差評価手段11は、推定手段13によって推定された測定情報である推定量に含まれる誤差を表す誤差情報を求め、表示手段14に出力する。本実施の形態では、最大誤差評価手段11は、モデル誤差によって推定量に生じ得る推定誤差の最大値(以下「最大推定誤差」という場合がある)を求める。ここで、モデル誤差とは、観測手段12によって取得された関係情報である観測量に含まれるモデル関数からの誤差である。また推定誤差とは、モデル誤差によって推定量に生じた誤差である。
【0023】
具体的には、最大誤差評価手段11は、推定手段13によって推定された方位、距離および位置などの推定量を用い、また必要に応じてセンサ19から与えられる情報を用いて、前記誤差情報として、前記推定量に生じる最大の推定誤差である最大推定誤差を定量し、表示手段14に出力する。センサ19からの情報が必要な場合および必要でない場合の具体例については、後述する。表示手段14は、推定手段13によって推定された推定量に加え、最大誤差評価手段11によって定量された誤差情報、本実施の形態では最大推定誤差を総合して表示することによって、測定装置1の使用者に提供する。
【0024】
最大誤差評価手段11は、比例係数計算手段15、推定モデル記憶手段16、最大誤差計算手段17およびモデル誤差量推定手段18を備える。推定モデル記憶手段16は、観測手段12によって観測される電波信号などの観測量をモデル化する関数であるモデル関数を、推定モデルとして記憶する。比例係数計算手段15は、推定モデル記憶手段16に記憶された推定モデルと、推定手段13によって推定された推定量とから、モデル誤差と、モデル誤差によって推定量に生じる誤差である推定誤差との比例係数、すなわちモデル誤差から推定誤差への比例係数を計算する。
【0025】
モデル誤差量推定手段18は、モデル誤差の量(以下「モデル誤差量」という)を推定する。モデル誤差量推定手段18は、必要に応じてセンサ19から与えられる情報を用いて、モデル誤差量を推定する。最大誤差計算手段17は、モデル誤差量推定手段18が推定したモデル誤差量と、比例係数計算手段15で計算した比例係数とから、最大の推定誤差、すなわち推定量の最大誤差を定量する。以下では、定量された最大誤差の量を「最大誤差量」という場合がある。
【0026】
以下では、最大誤差評価手段11に含まれる各構成要素について、詳細に解説する。
【0027】
まず、最大誤差評価手段11を構成するに先立ち、モデル誤差をベクトルηでパラメトライズ、すなわち媒介変数表示し、考慮するモデル誤差の集合Eγを以下の式(1)で表す。以下では、モデル誤差を「モデル誤差η」という場合がある。
【0028】
【数1】

【0029】
式(1)において、符号γは、モデル誤差ηの大きさを定める閾値を示す。式(1)に示すベクトルηのpノルムは、以下の式(2)で定義される。
【0030】
【数2】
【0031】
式(1)および式(2)において、符号pは、1もしくは2の整数、または無限大(∞)を示す。式(2)において、ηiは、ベクトルηの第i要素を表し、|ηi|は、ηiの絶対値を意味する。また、ηが0のとき、モデル誤差が無いとする。
【0032】
推定手段13によって推定される推定量は、測定装置1が何に適用されるかによって異なる。推定量は、たとえば測定装置1が測角装置として用いられる場合には方位であり、測距装置として用いられる場合には距離であり、測位装置として用いられる場合には位置である。測定装置1の適用先によっては、これらの推定量を推定するときに、雑音の分散および電波信号の強度などを同時に推定する場合がある。また複数の発信源の方位、距離および位置などを推定するときに、そのうちの一部の推定量に関する推定誤差のみを定量したい場合もある。
【0033】
そこで方位、距離および位置、またはその一部など、推定誤差を定量したい推定量をベクトルξでパラメトライズし、推定誤差を定量しない推定量をベクトルζでパラメトライズする。様々な推定量をどのようにパラメトライズするかは、測定量および測定方法に依存するので、本実施の形態では説明せず、後述の実施の形態で具体的なパラメトライズを例示する。
【0034】
また観測手段12によって観測される観測量の統計的性質を、確率変数Yによって表す。観測手段12による実際の観測値、すなわち確率変数Yの標本からベクトルξおよびベクトルζが推定できることから、確率変数Yが従う分布は、ベクトルξおよびベクトルζに依存して変化するはずである。またモデル誤差ηによって推定値に誤差が生じることから、確率変数Yが従う分布は、モデル誤差ηにも依存しているはずである。そこで、モデル誤差ηが無いときに確率変数Yが従う分布の確率密度関数をf(y,ξ,ζ)と表現し、モデル誤差ηがあるときに確率変数Yが従う分布の確率密度関数をf〜(y,ξ,ζ,η)と表現する。ただし、f〜(y,ξ,ζ,0)=f(y,ξ,ζ)とする。「f〜」は、記号「f」の上に記号「〜」を付した記号を表す。
【0035】
推定モデル記憶手段16は、推定モデルであるモデル関数として、確率密度関数f〜を記憶する。推定モデル記憶手段16は、半導体メモリなどを用いて、確率密度関数f〜の関数形を所定の値として記憶している。記憶する具体的な方法は任意であり、最低限、y,ξ,ζ,ηを与えたときに、その確率密度関数f〜が計算できればよい。たとえば、推定モデル記憶手段16は、y,ξ,ζ,ηから確率密度関数f〜を計算する計算機プログラムの形で、確率密度関数f〜を記憶する。
【0036】
比例係数計算手段15は、推定モデル記憶手段16に記憶した確率密度関数f〜と、推定手段13によって推定したベクトルξ,ζの推定値ξest,ζestとから、以下の式(3)で定義される行列要素Ξi(y)を、ベクトルξの全ての要素ξiに関して横に並べた行列Ξ(y)を構成する。
【0037】
【数3】
【0038】
同様に、比例係数計算手段15は、ベクトルζの全ての要素ζiに関して、以下の式(4)で定義される行列要素φi(y)を横に並べた行列Φ(y)を構成する。また比例係数計算手段15は、ベクトルηの全ての要素ηiに関して、以下の式(5)で定義される行列要素ψi(y)を横に並べた行列Ψ(y)を構成する。
【0039】
【数4】
【0040】
【数5】
【0041】
その上で、比例係数計算手段15は、以下の式(6)および式(7)で定義される行列を計算する。式(6)および式(7)において、Eは期待値作用素である。比例係数計算手段15は、期待値を、確率変数Yがモデル誤差の無い理想的な分布に従うものとして計算する。
【0042】
【数6】
【0043】
【数7】
【0044】
最後に、比例係数計算手段15は、以下の式(8)で定義される行列Λを計算する。この行列Λが、比例係数計算手段15の出力となる。
【0045】
【数8】
【0046】
前述のように推定モデル記憶手段16において確率密度関数f〜が計算機プログラムの形で記憶されている場合、比例係数計算手段15において、期待値の計算は、マルコフ連鎖モンテカルロ法を用いて行われ、マルコフ連鎖モンテカルロ法の各ステップにおける微分の計算は、数値微分を用いて行われる。数値微分については、S.Diop,J.W.Grizzle,F.Chaplais“On Numerical Differentiation Algorithms for Nonlinear Estimation”Proc. Of IEEE Conf. Decision and Control,2000.(以下「参考文献1」という)に記載の公知の方法を用いることができる。またマルコフ連鎖モンテカルロ法については、伊庭幸人、外5名、「統計科学のフロンティア(第12巻)計算統計II〜マルコフ連鎖モンテカルロ法とその周辺」、第1版、株式会社岩波書店、2005年10月28日、p.8−13(以下「参考文献2」という)に記載の公知の方法を用いることができる。
【0047】
ここで、ベクトルξのモデル誤差ηが生む推定誤差をdξとおくと、推定誤差dξは以下の式(9)の関係を満たす。
【0048】
【数9】
【0049】
式(9)においてOは、ランダウの漸近表記であり、推定誤差dξの各要素とΛηの各要素との相違が、モデル誤差ηの2ノルムの2乗の定数倍以下であることを示す。したがって、モデル誤差ηが十分に小さければ、推定誤差dξはΛηで近似することができる。つまり行例Λは、モデル誤差ηから推定誤差dξへの比例係数である。
【0050】
以上のように比例係数計算手段17は、推定モデル記憶手段16に記憶された確率密度関数f〜と、推定手段13によって推定された推定値ξest,ζestとを用いて、モデル誤差ηから推定誤差dξへの比例係数である行列Λ(以下「比例係数Λ」という場合がある)を計算する。
【0051】
前述のように推定誤差dξは式(9)の関係を満たすので、モデル誤差ηがモデル誤差集合Eγに含まれている場合に、モデル誤差ηによって生じる推定誤差dξの最大値(以下「最大推定誤差」という場合がある)は、以下の式(10)および式(11)で近似的に評価することができる。具体的には、モデル誤差集合Eγを表す式(1)における符号pが1または2(p=1またはp=2)のときには、最大推定誤差は、以下の式(10)で近似的に評価することができる。式(1)における符号pが∞(p=∞)のときには、最大推定誤差は、以下の式(11)で近似的に評価することができる。式(10)および式(11)において、符号qは、1もしくは2の整数、または∞を示す。式(11)において、符号nは、行列Λの列数を示す。
【0052】
【数10】
【0053】
【数11】
【0054】
式(10)および式(11)の右辺は、pとqとに応じて、表1に示すように計算することができる。表1では、式(10)または式(11)の右辺で表される最大推定誤差の近似的な評価を、pとqとの組合せ毎に示す。
【0055】
【表1】
【0056】
表1において、符号mは、行列Λの行数を示す。また、表1に示される行列Λの1ノルム、2ノルムおよび無限大ノルムは、それぞれ以下の式(12)、式(13)および式(14)で表される。
【0057】
【数12】
【0058】
【数13】
【0059】
【数14】
【0060】
式(13)において、σmax(Λ)は、行列Λの最大特異値を意味する。最大特異値は、たとえばW.H.Press,S.A.Teukolsky,W.T.Vetterling,B.P.Flannery著、丹慶勝市、奥村晴彦、佐藤俊郎、小林誠訳、「Numerical Recipes in C[日本語版]C言語による数値計算のレシピ」、初版、株式会社技術評論社、2001年11月1日、p.73−85,p.386−p.391(以下「参考文献3」という)に記載の公知の手段で計算することができる。
【0061】
表1に示される評価のうち、p=q=1およびp=q=2の2つの項目以外の評価は、保守的な評価である。
【0062】
モデル誤差量推定手段18は、前述の式(1)に示すモデル誤差ηの大きさを定める閾値γを推定することによって、前述のモデル誤差量を推定する。最も簡単な閾値γの推定は、所定の定数を出力することである。換言すれば、モデル誤差量推定手段18は、最も簡単には、閾値γとして所定の定数を出力することによって、閾値γを推定する。この場合、測定装置1はセンサ19を必要としない。
【0063】
モデル誤差量推定手段18は、観測手段12によって観測される電波信号(以下「観測信号」という場合がある)から閾値γを推定してもよいし、センサ19を用いて閾値γを推定してもよい。観測信号から閾値γを推定する場合は、観測手段12が、センサ19と同等の機能、すなわち電波環境を計測してモデル誤差量推定手段18に与える機能を果たすので、センサ19を設ける必要はない。したがって測定装置1は、センサ19を備えなくてもよい。
【0064】
最大誤差計算手段17は、比例係数計算手段15で求めた比例係数である行列Λと、モデル誤差量推定手段18で推定した閾値γとを用いて、表1に記載の評価値の1つまたは複数を計算し、最大推定誤差として出力する。
【0065】
以上のようにして、最大誤差評価手段11によって、モデル誤差集合Eγに含まれるモデル誤差ηに対する最大推定誤差を定量することができる。これによって、測定装置1は、測定情報を推定手段13によって推定するときに、測定情報である推定量に生じた誤差に関する誤差情報を測定装置1の使用者に提供することができる。具体的には、測定装置1は、モデル誤差ηによって、推定値にどのくらいの推定誤差が生じているかという情報を、測定装置1の使用者に提供することができる。したがって、本実施の形態の測定装置1によれば、実際の観測環境および観測装置がもつモデル誤差ηが未知の場合、たとえば多数の微弱な干渉波信号が存在する環境下で測定する場合、および観測手段12に製造誤差がある場合でも、モデル誤差ηが生む最大の推定誤差を定量し、その情報を測定装置1の使用者に提供することができる。
【0066】
また本実施の形態の測定装置1は、観測手段12によって電波信号を受信し、受信した電波信号に基づいて、推定手段13によって測定情報を推定する。本実施の形態の測定装置1によれば、このように電波信号を用いて測定情報を推定する場合に、測定情報に生じる誤差に関する情報を測定装置1の使用者に提供することができる。
【0067】
<第2の実施の形態>
次に本発明の第2の実施の形態の測定装置について説明する。本実施の形態の測定装置は、最大誤差評価手段11における処理が異なること以外は、前述の第1の実施の形態の測定装置1と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0068】
本実施の形態では、最大誤差評価手段11において、比例係数Λを推定値ξest,ζestを含んだ形で解析的に解いておく。本実施の形態において、推定モデル記憶手段16は、半導体メモリなどで構成され、推定値ξest,ζestから比例係数Λを計算するプログラムを記憶している。推定モデルである確率密度関数f〜は、比例係数Λを計算するプログラムに組込まれることになる。したがって推定モデル記憶手段16が、比例係数Λを計算するプログラムを記憶することは、確率密度関数f〜を記憶することに相当する。
【0069】
比例係数計算手段15は、計算機などのプログラム実行装置によって実現され、推定モデル記憶手段16に記憶されたプログラムを用いて比例係数Λを計算する。モデル誤差量推定手段18および最大誤差計算手段17は、第1の実施の形態と同様に構成される。
【0070】
以上のように本実施の形態では、最大誤差評価手段11は、推定モデル記憶手段16に、推定値ξest,ζestから比例係数Λを計算するプログラムを記憶している。そして、最大誤差評価手段11は、比例係数計算手段15によって、推定モデル記憶手段16に記憶されたプログラムを用いて比例係数Λを計算する。これによって、第1の実施の形態の最大誤差評価手段11の比例係数計算手段15におけるマルコフ連鎖モンテカルロ法および数値微分を用いた計算を省略することができる。したがって、第1の実施の形態に比べて、測定装置全体が必要とする計算量を削減することができる。
【0071】
<第3の実施の形態>
次に本発明の第3の実施の形態の測定装置について説明する。本実施の形態の測定装置は、最大誤差評価手段11における処理が異なること以外は、前述の第1および第2の実施の形態の測定装置1と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0072】
前述の第2の実施の形態では、前述の表1に示すpおよびqが2(p=q=2)の場合でも、最大誤差評価手段11において、比例係数Λを推定値ξest,ζestを含んだ形で解析的に解いておく。これに対し、本実施の形態では、pおよびqが2(p=q=2)の場合には、最大誤差評価手段11において、以下の式(15)で表される行列を、推定値ξest,ζestを含んだ形で解析的に解いておく。
【0073】
【数15】
【0074】
推定モデル記憶手段16は、半導体メモリなどで構成され、推定値ξest,ζestから式(15)で表される行列を計算するプログラムを記憶している。推定モデルである確率密度関数f〜は、式(15)で表される行列を計算するプログラムに組込まれることになる。したがって推定モデル記憶手段16が、式(15)で表される行列を計算するプログラムを記憶することは、確率密度関数f〜を記憶することに相当する。
【0075】
比例係数計算手段15は、計算機などのプログラム実行装置によって実現され、推定モデル記憶手段16に記憶されたプログラムを用いて、式(15)で表される行列を計算する。モデル誤差量推定手段18は、第1の実施の形態と同様に構成される。最大誤差計算手段17は、本実施の形態では、比例係数Λの最大特異値σmax(Λ)が式(15)の最大固有値の自乗根と等しいことを利用して、式(15)から最大特異値σmax(Λ)を計算する。
【0076】
比例係数Λは、推定誤差を評価したい推定量の個数分の行数と、モデル誤差のパラメータηの次元分の列数を持つ行列である。モデル誤差のパラメータηの次元は大きいので、比例係数Λは列方向に大きな行列となる。これに対し、式(15)で表される行列は、推定誤差を評価したい推定量の個数に等しい列数および行数を持つ正方行列であるので、比例係数Λに比べて有意に小さな行列である。
【0077】
本実施の形態において、最大誤差評価手段11は、式(15)で表される行列を計算するので、大きな行列Λを直接計算せずに最大推定誤差を求めることができる。これによって、前述の第2の実施の形態の測定装置に比較して、測定装置全体が必要とする計算量をさらに削減することができる。
【0078】
<第4の実施の形態>
次に本発明の第4の実施の形態について説明する。図2は、本発明の第4の実施の形態である測距装置21を含む測距システム20の構成を模式的に示す図である。測距システム20は、測距装置21およびトランスポンダ23を備えて構成される。本実施の形態の測距装置21は、前述の第1の実施の形態の測定装置1を適用した測距装置である。したがって測距装置21は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測距装置21は、電波信号を用いて2つの地点間の距離を測定する。本実施の形態では、測距装置21は、モデル誤差として、微弱な干渉波信号27の影響、すなわち干渉波信号27によって生じる誤差を考慮する。
【0079】
測距システム20では、1つの測距装置21に対して、複数のトランスポンダ23がそれぞれ異なる位置に設けられてもよい。本実施の形態では、理解を容易にするために、2つのトランスポンダ23を備える測距システム20について説明するが、トランスポンダ23は、3つ以上備えられてもよい。
【0080】
測距装置21は、測距装置用アンテナ22を備える。測距装置用アンテナ22は、前述の図1に示す観測手段12に備えられる。各トランスポンダ23は、トランスポンダ用アンテナ24を備える。測距装置21およびトランスポンダ23は、距離を測定したい2つの地点にそれぞれ設置される。さらに具体的には、測距装置21およびトランスポンダ23は、測距装置用アンテナ22とトランスポンダ用アンテナ24とが、距離を測定したい2つの地点と正確に一致するように設置される。
【0081】
測距システム20は、以下の手順で動作する。まず測距装置21が、各トランスポンダ23に向けて、測距装置用アンテナ22を介してトリガ信号25を送信する。各トランスポンダ23は、測距装置21から送信されたトリガ信号25をトランスポンダ用アンテナ24で受信する。トランスポンダ23は、測距装置21から送信されたトリガ信号25を受信すると、直ちに、または所定の時間βが経過した後に、測距装置21に向けて、トランスポンダ用アンテナ24を介して応答信号26を送信する。測距装置21は、各トランスポンダ23から送信された応答信号26を、測距装置用アンテナ22を介して受信する。本実施の形態では、測距装置21が応答信号26を受信するときに、微弱な干渉波信号27も同時に受信してしまうものとする。
【0082】
トランスポンダ23は、電波信号の送受信器と増幅器とを備えた無線装置によって実現されてもよいし、単純な電波反射器によって実現されてもよい。トランスポンダ23が無線装置によって実現される場合、トリガ信号25と応答信号26とは、異なっていてもよいし、同じであってもよい。トランスポンダ23が電波反射器によって実現される場合、トリガ信号25が電波反射器であるトランスポンダ23で反射された信号が応答信号26であり、前記所定の時間βは0である。
【0083】
本実施の形態では、トランスポンダ23の個数をNとおき、各トランスポンダ23を添字nで区別する。たとえば複数のトランスポンダ23のうち、n個目のトランスポンダ23を第nトランスポンダ23という。電波信号は光速cで伝播するので、測距装置21がトリガ信号25を送信してから応答信号26を受信するまでの経過時間は、測距装置21と第nトランスポンダ23との間の距離をlnとして、以下の式(16)で表される。
【0084】
【数16】
【0085】
したがって、干渉波信号が無い理想的な条件下で測距装置21が受信した受信信号、具体的には応答信号26をIQ(In Phase-Quadrant Phase)検波した標本z(k)は、トランスポンダ23が送信する応答信号26をw(t)として、以下の式(17)で表現することができる。式(17)において、符号hはサンプリング周期を示し、x(k)は雑音を示す。
【0086】
【数17】
【0087】
第nトランスポンダ23が無線装置で実現される場合、式(17)におけるαnは、第nトランスポンダ23から測距装置21への応答信号26である電波信号の複素伝播係数を意味する。第nトランスポンダ23が電波反射器で実現される場合、式(17)におけるαnは、第nトランスポンダ23から測距装置21への応答信号26である電波信号の複素伝播係数の自乗に、第nトランスポンダ23の反射係数を掛け合わせたものを意味する。
【0088】
ここでx(k)は複素ガウス分布に従うものとみなせるので、干渉波信号が無い理想的な状況下では、受信信号z(k)の従う分布の確率密度関数fは、以下の式(18)で表現することができる。式(18)におけるu(k)は、以下の式(19)で定義される。式(18)および式(19)において、符号lは、測距装置21とトランスポンダ23との間の距離(以下、単に「距離」という場合がある)を示し、測距装置21と第nトランスポンダ23との間の距離lnを縦に並べたベクトルで表される。またαは、トランスポンダ23から測距装置21への電波信号の伝播係数(以下、単に「伝播係数」という場合がある)を示し、第nトランスポンダ23から測距装置21への電波信号の複素伝播係数αnを縦に並べたベクトルで表される。またσは、雑音の標準偏差を示す。
【0089】
【数18】
【0090】
【数19】
【0091】
本実施の形態において、観測手段12は、トランスポンダ23からの電波信号である応答信号26を受信し、受信した応答信号26をIQ検波し、複素デジタル標本zとして出力する。推定手段13は、推定値として、標本zを実際の受信信号としたときの確率密度関数fを最大にするような距離l、伝播係数αおよび標準偏差σのうち、少なくとも距離lを求める。距離lを求める方法としては、たとえば前述の参考文献1に記載の公知の方法を用いることができる。伝播係数αおよび標準偏差σの推定値は、距離lの推定値から求めることができる。
【0092】
次に、干渉波信号v(k)が存在する場合を考える。干渉波信号v(k)が存在する場合、受信信号z(k)は以下の式(20)で表される。
【0093】
【数20】
【0094】
本実施の形態の測距装置21では、干渉波信号の最大電力がγ2程度であるという想定のもと、前述の第1の実施の形態で説明した最大誤差評価手段11を用いて、干渉波信号による最大の推定誤差を定量することができる。
【0095】
受信信号に干渉波信号が重畳する場合の受信信号zが従う分布の確率密度関数f〜は、以下の式(21)で表される。式(21)におけるu(k)は、以下の式(22)で定義される。
【0096】
【数21】
【0097】
【数22】
【0098】
ここでy,ξ,ζ,ηを、以下の式(23)、式(24)、式(25)および式(26)に示すようにおく。
【0099】
【数23】
【0100】
【数24】
【0101】
【数25】
【0102】
【数26】
【0103】
式(23)〜式(26)に示すようにy,ξ,ζ,ηをおくと、ξ,ζ,ηに依存するyの確率密度関数f〜は、以下の式(27)で表される。式(27)におけるu(ξ,ζ)は、以下の式(28)で定義される。
【0104】
【数27】
【0105】
【数28】
【0106】
式(23)〜式(26)におけるzr,αr,vrは、それぞれz,α,vの実部を表し、zi,αi,viはそれぞれz,α,vの虚部を表す。
【0107】
式(24)では、式(22)におけるlnの全てをξとしているが、式(22)におけるlnのうちの一部だけをξとし、残りをζに含めてもよい。また干渉波信号の総電力がγ2であることから、モデル誤差のノルムはp=2である。あとは第1の実施の形態と同様に最大誤差評価手段11を構成する。
【0108】
<第4の実施の形態の第1変形例>
次に、測距装置21の最大誤差評価手段11として、第1の実施の形態における最大誤差評価手段11に代えて、第2の実施の形態における最大誤差評価手段11を適用した測距装置について説明する。第2の実施の形態における最大誤差評価手段11を用いることによる前述の計算量の低減効果をより明確に示すために、標本数Kが十分大きく、応答信号w(t)が近似的に定常な信号の場合を考える。この場合、比例係数Λは以下の手順で計算することができる。
【0109】
まず応答信号26を表す関数w(t)の微分をd(t)として、関数w(t)の全ての要素を並べた行列Wおよび微分d(t)の全ての要素を並べた行列Dを、それぞれ以下の式(29)および式(30)に示すようにおく。
【0110】
【数29】
【0111】
【数30】
【0112】
さらに関数w(t)の自己相関関数をRw,w(t)として、自己相関関数Rw,w(t)の全ての要素を並べた行列Sw,wを、以下の式(31)に示すようにおく。
【0113】
【数31】
【0114】
また関数w(t)の微分d(t)と関数w(t)との相互相関関数をRd,w(t)とし、微分d(t)の自己相関関数をRd,d(t)として、相互相関関数Rd,w(t)の全ての要素を並べた行列Sd,wおよび微分d(t)の自己相関関数Rd,d(t)の全ての要素を並べた行列Sd,dを式(31)と同様におく。このとき、αnを対角に並べた行列をAとし、以下の式(32)で表される行列の実部および虚部をそれぞれGr,Giとおく。
【0115】
【数32】
【0116】
さらに式(33)で表される行列をFとする。
【0117】
【数33】
【0118】
このとき干渉波信号vがもたらす推定誤差は、以下の式(34)で表される。
【0119】
【数34】
【0120】
ただし、vrは干渉波信号v(k)の実部をk=0からk=K−1まで縦に並べた行列であり、viは干渉波信号v(k)の虚部をk=0からk=K−1まで縦に並べた行列である。したがって、比例係数Λは以下の式(35)で表される。
【0121】
【数35】
【0122】
式(35)で表される比例係数Λの計算は、第1の実施の形態の比例係数計算手段15におけるマルコフ連鎖モンテカルロ法と数値微分法とを用いた計算よりも、大幅に計算量が少ない。したがって、測距装置21の最大誤差評価手段11として、第1の実施の形態における最大誤差評価手段11に代えて、第2の実施の形態における最大誤差評価手段11を適用することによって、第1の実施の形態に比べて、測定装置全体が必要とする計算量を削減することができる。
【0123】
<第4の実施の形態の第2変形例>
次に、測距装置21の最大誤差評価手段11として、第1の実施の形態における最大誤差評価手段11に代えて、第3の実施の形態における最大誤差評価手段11を適用した測距装置について説明する。p=q=2として第3の実施の形態で説明した最大誤差評価手段11を第4の実施の形態に適用する場合、最大誤差評価手段11は、式(15)で表される行列として、以下の式(36)で表される行列F-1を計算すればよい。
【0124】
【数36】
【0125】
式(36)の形から明らかなように、式(36)を計算する方が、前述の第1変形例で用いられる式(35)を計算するよりも、計算量が少なくなっている。したがって、測距装置21の最大誤差評価手段11として、第3の実施の形態における最大誤差評価手段11を用いることによって、第2の実施の形態における最大誤差評価手段11を用いた第1変形例の測定装置に比較して、測定装置全体が必要とする計算量をさらに削減することができる。
【0126】
第4の実施の形態において、観測手段12は、トランスポンダ23からの応答信号26を受信する。推定手段13は、観測手段12によって受信された応答信号26から、受信機である測距装置21とトランスポンダ23との距離l、伝播係数αおよび雑音の標準偏差σを推定する。伝播係数αおよび雑音の標準偏差σの推定値は、距離lの推定値から計算できるので、推定手段13は、少なくとも距離lを推定できればよい。
【0127】
また距離lの推定値は、確率密度関数fを最大にする距離lとして特徴づけられるが、必ずしも確率密度関数fを最大化することによって距離lを求める必要はない。推定手段13は、確率密度関数fを最大にするような距離l、または十分精度の良いその近似値を求める公知の手段を用いて、距離lの推定値を求めればよい。距離lの推定値を求める公知の手段としては、たとえば前述の参考文献1に記載される手段を用いることができる。
【0128】
最大誤差評価手段11は、少なくとも推定手段13が推定した距離lの推定値から、総電力γ2以下の干渉波信号が推定値に与える最大の誤差である最大推定誤差を定量し、表示手段14に与える。表示手段14は、推定手段13で推定された推定値と、最大誤差評価手段11で定量された最大推定誤差とを、総合して表示することによって、測距装置21の使用者に提供する。
【0129】
最大誤差評価手段11において、推定モデル記憶手段16は、確率密度関数f〜を計算するプログラムを記憶する。比例係数計算手段15は、推定モデル記憶手段16に記憶された確率密度関数f〜を形成するプログラムを用いて、第1の実施の形態における最大誤差評価手段11と同様にして、比例係数Λを求める。このとき、推定誤差を定量すべき推定量は、測距装置21と全てのトランスポンダ23との間の距離としてもよいし、測距装置21と一部のトランスポンダ23との間の距離としてもよい。
【0130】
モデル誤差量推定手段18は、たとえば所定の値を閾値γとして出力するか、推定手段13によって推定した雑音の標準偏差σを閾値γとして出力するか、またはセンサ19を用いて電波環境を計測して干渉波信号の総電力γ2を推定して閾値γを出力することによって、モデル誤差量を推定する。所定の値を閾値γとして出力する場合は、センサ19は必要ではない。標準偏差σを閾値γとして出力する場合は、観測手段12および推定手段13がセンサ19と同様の機能を果たすので、センサ19は必要ではない。
【0131】
最大誤差計算手段17は、モデル誤差量推定手段18によって推定した閾値γと、比例係数計算手段15によって計算した比例係数Λとから、最大推定誤差の定量値として、表1のp=2、q=1、2または∞の各量のうち少なくともいずれか1つを計算して出力する。
【0132】
第1変形例のように、測距装置21の最大誤差評価手段11として第2の実施の形態で説明した最大誤差評価手段11を用いる場合、推定モデル記憶手段16は、式(35)に従って比例係数Λを計算するプログラムを記憶するように構成される。比例係数計算手段15は、推定モデル記憶手段16に記憶されたプログラムを実行する計算機などのプログラム実行装置として構成される。
【0133】
第2変形例のように、p=q=2として、測距装置21の最大誤差評価装置11として第3の実施の形態で説明した最大誤差評価手段11を用いる場合、推定モデル記憶手段16は、式(36)に従ってΛΛTを計算するプログラムを記憶するように構成される。比例係数計算手段15は、推定モデル記憶手段16に記憶された前記プログラムを実行して式(36)で表される行列ΛΛTを求める。最大誤差計算手段17は、比例係数計算手段15で求めた前記ΛΛTから最大推定誤差を計算する。
【0134】
本実施の形態の測距装置21によれば、様々な干渉波信号が存在する環境下において、離れた2つの地点間の距離を、電波信号を用いて計測するだけでなく、干渉波信号が距離の推定値に与える最大推定誤差を定量し、その情報を測距装置21の使用者に提供することができる。また第1および第2変形例のように、第2または第3の実施の形態で説明した最大誤差評価手段11を用いることによって、最大推定誤差をより少ない計算量で提供することができる。したがって、前述のように最大推定誤差を定量して使用者に提供することのできる測距装置21を、より簡単な構成で実現することができる。
【0135】
<第5の実施の形態>
次に本発明の第5の実施の形態の測距装置について説明する。本実施の形態の測距装置は、前述の図2に示す第4の実施の形態の測距装置21において、モデル誤差として、干渉波信号27によって生じる誤差ではなく、観測手段12の製造誤差を考慮した構成になっている。本実施の形態の測距装置は、考慮するモデル誤差が観測手段12の製造誤差であること以外は、前述の第4の実施の形態の測距装置21と同様であるので、異なる部分について説明し、同様の説明を省略する。
【0136】
本実施の形態の測距装置は、第4の実施の形態の測距装置21と同様、図2に示すトランスポンダ23とともに測距システム20を構成する。本実施の形態の測距装置は、第4の実施の形態と同様、前述の第1の実施の形態の測定装置1を適用した測距装置である。したがって本実施の形態の測距装置は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。
【0137】
図3は、観測手段12の構成を示すブロック図である。観測手段12は、具体的には、測距装置用アンテナ22、第1増幅器31、I検波器32、第2増幅器32およびQ検波器34を備えて構成される。観測手段12は、測距装置用アンテナ22を介して、トランスポンダ23から送信された応答信号26を受信する。受信された応答信号26は、第1増幅器31および第2増幅器33に与えられ、各増幅器31,32で増幅される。第1増幅器31で増幅された信号は、I検波器32に与えられ、I検波器32でI検波が行われる。第2増幅器33で増幅された信号は、Q検波器34に与えられ、Q検波器34でQ検波が行われる。I検波器32によってI検波された信号およびQ検波器34によってQ検波された信号は、推定手段13に与えられる。
【0138】
本実施の形態では、観測手段12の製造誤差によって、推定手段13に与えられる信号の実部および虚部にそれぞれ、乗法的にゲイン誤差が重畳する場合を考える。I検波器32には、第1増幅器31に起因するゲインが与えられ、Q検波器34には、第2増幅器33に起因するゲインが与えられる。この結果、受信信号z(k)は、ゲイン誤差の実部のパラメータをbrとし、虚部のパラメータをbiとして、以下の式(37)で表される。
【0139】
【数37】
【0140】
式(37)において、符号jは、虚数単位を表す。αnrは、式(17)に示す複素伝播係数αnの実部を表し、αniは、式(17)に示す複素伝播係数αnの虚部を表す。ω、k、h、ln、c、βおよびx(k)は、式(17)と同様である。製造時の規格として、式(37)におけるゲイン誤差のパラメータbr,biは、以下の式(38)を満たすものとする。
【0141】
【数38】
【0142】
このとき、モデル誤差である観測手段12の製造誤差ηを、以下の式(39)に示すようにおき、他は前述の第4の実施の形態と同様に最大誤差評価手段11を構成する。これによって、観測手段12の製造誤差がもたらす最大の推定誤差を定量することができる。
【0143】
【数39】
【0144】
本実施の形態においても、第2または第3の実施の形態で説明したように、比例係数Λ、またはΛΛTを解析的に求めて最大誤差評価手段11を構成することによって、計算量を削減することができる。
【0145】
以上のように本実施の形態の測距装置によれば、観測手段12が製造誤差を持っている場合でも、離れた2つの地点間の距離を、電波信号を用いて推定するとともに、観測手段12の製造誤差が推定値に及ぼす最大の誤差である最大推定誤差を定量し、その情報を測距装置の使用者に提供することができる。また最大誤差評価手段11として、第2または第3の実施の形態の最大誤差評価手段11を用いることによって、前述の推定値および最大推定誤差をより少ない計算量で提供することができる。
【0146】
本実施の形態では、第4の実施の形態で示した干渉波信号に対する最大誤差評価手段11に続き、観測手段12の製造誤差に対する最大誤差評価手段11を示したが、その他のモデル誤差に対しても同様に最大誤差評価手段11を構成することができる。
【0147】
<第6の実施の形態>
次に本発明の第6の実施の形態について説明する。図4は、本発明の第6の実施の形態である測位装置41を含む測位システム40の構成を模式的に示す図である。測位システム40は、測位装置41およびトランスポンダ43を備えて構成される。本実施の形態の測位装置41は、前述の第1の実施の形態の測定装置1を適用した測位装置である。したがって測位装置41は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測位装置41は、電波信号を用いて、トランスポンダ43の位置を測定する。本実施の形態では、測位装置41は、モデル誤差として、微弱な干渉波信号46の影響、すなわち干渉波信号46によって生じる誤差を考慮する。
【0148】
トランスポンダ43は、位置を測定したい地点に設置される。測位システム40では、1つの測位装置41に対して、複数のトランスポンダ43がそれぞれ異なる位置に設置されていてもよい。図4では、理解を容易にするために、1つのトランスポンダ43を備える測位システム40を図示しているが、トランスポンダ43は、2つ以上備えられてもよい。
【0149】
測位装置41は、複数の測位装置用アンテナ42を備える。本実施の形態では、測位装置41は、3つの測位装置用アンテナ42を備える。複数の測位装置用アンテナ42は、異なる位置に設けられる。換言すると、測位装置41は、2つ以上の異なる位置に、測位装置用アンテナ42を備える。測位装置用アンテナ42は、前述の図1に示す観測手段12に備えられる。複数の測位装置用アンテナ42は、たとえば時分割でトリガ信号を送信することによって、それぞれ独立にトランスポンダ43と電波信号の送受信ができるように構成される。
【0150】
トランスポンダ43は、トランスポンダ用アンテナ44を備える。トランスポンダ43は、前述の第4の実施の形態におけるトランスポンダ23と同様、電波信号の送受信器と増幅器とを備えた無線装置によって実現されてもよいし、単純な電波反射器によって実現されてもよい。
【0151】
測位システム40は、前述の図2に示す測距システム20と同様の手順で動作する。具体的には、まず測位装置41がトランスポンダ43に向けて、各測位装置用アンテナ42を介してトリガ信号を送信する。トランスポンダ43は、測位装置41から送信されたトリガ信号をトランスポンダ用アンテナ44で受信する。トランスポンダ43は、測位装置41から送信されたトリガ信号を受信すると、直ちに、または所定の時間βが経過した後に、測位装置41に向けて、トランスポンダ用アンテナ44を介して応答信号として電波信号45を送信する。測位装置41は、トランスポンダ43から送信された電波信号45を、各測位装置用アンテナ42を介して受信する。
【0152】
トランスポンダ43が無線装置によって実現される場合、トリガ信号と応答信号である電波信号45とは、異なっていてもよいし、同じであってもよい。トランスポンダ43が電波反射器によって実現される場合、トリガ信号が電波反射器であるトランスポンダ43で反射された信号が、応答信号である電波信号45であり、前記所定の時間βは0である。
【0153】
本実施の形態では、モデル誤差ηとして干渉波信号46が、各測位装置用アンテナ42を介して受信されてしまう場合を考える。また干渉波信号46の総電力は、前述の式(1)に示すモデル誤差ηの大きさを定める閾値γの自乗γ2であるとする。
【0154】
ある測位装置用アンテナ42から等距離にある点の集合は、2次元平面上で測位装置用アンテナ42を中心とする円を描く。測位装置41が2つの測位装置用アンテナ42を備える場合、2つの測位装置用アンテナ42からトランスポンダ43までの距離をそれぞれ測定すれば、トランスポンダ43の位置は平面上の2点に限定される。この場合、事前知識として、トランスポンダ43の存在範囲が限定されていれば、2つの測位装置用アンテナ42によってトランスポンダ43の位置を決定することができる。測位装置41が3つの測位装置用アンテナ42を備える場合には、3つの測位装置用アンテナ42が同一直線上でない位置関係にあれば、3つの測位装置用アンテナ42からトランスポンダ43までの距離をそれぞれ測定することによって、平面内でトランスポンダ43の位置を一意に決定することができる。
【0155】
ここで、トランスポンダ43の個数をNとおき、各トランスポンダ43を添字nで区別する。たとえば複数のトランスポンダ43のうち、n個目のトランスポンダ43を第nトランスポンダ43という。測位システム40がトランスポンダ43を1つ備える場合には、このトランスポンダ43を第1トランスポンダ43という。また測位装置用アンテナ42の個数をMとおき、各測位装置用アンテナ42を添字mで区別する。たとえば複数の測位装置用アンテナ42のうち、m個目の測位装置用アンテナ42を第m測位装置用アンテナ42という。また第nトランスポンダ43の位置を2次元ベクトルで表現してrnとおき、第m測位装置用アンテナ42の位置を2次元ベクトルで表現してsmをおく。
【0156】
第m測位装置用アンテナ42での干渉波信号vの受信信号をvm(k)とおくと、第m測位装置用アンテナ42での受信信号zm(k)は、トランスポンダ43からの電波信号45をw(t)とし、第nトランスポンダ43からの電波信号w(t)をwn(t)とし、第m測位装置用アンテナ42で受信される雑音x(k)をxm(k)として、以下の式(40)で表される。
【0157】
【数40】
【0158】
式(40)におけるαm,nは、トランスポンダ43が無線装置で実現される場合には、第nトランスポンダ43から第m測位装置用アンテナ42への電波信号45の伝播係数であり、トランスポンダ43が電波反射器で実現される場合には、第nトランスポンダ43から第m測位装置用アンテナ42への電波信号45の伝播係数の自乗に、第nトランスポンダ43の反射係数を掛け合わせたものである。式(40)におけるk、h、cおよびβは、式(17)と同様である。
【0159】
z1(k)からzM(k)までを縦に並べた行列をz(k)として、受信信号zの従う確率密度関数は、zmがそれぞれ従う確率密度関数の積で表されるので、r1からrNまでを並べた行列をrとし、σ1からσMまでを並べた行列をσとして、受信信号zが従う分布の確率密度関数f〜は、以下の式(41)で表される。ただし、式(41)におけるum(k)は、以下の式(42)で定義される。
【0160】
【数41】
【0161】
【数42】
【0162】
ただし、式(41)および式(42)におけるum(k)は、u(k)の第m要素を意味する。モデル誤差が無いときの理想的な確率密度関数fは、式(42)においてv=0としたときの式(41)の確率密度関数f〜に等しい。
【0163】
本実施の形態において、測位装置41の観測手段12は、トランスポンダ43からの電波信号45を受信する。推定手段13は、たとえば非特許文献1に記載の公知の手段によって、観測手段12で受信した電波信号45である受信信号からトランスポンダ43の位置を推定する。最大誤差評価手段11は、第1の実施の形態で説明した方法によって、少なくとも推定手段13が推定したトランスポンダ43の位置の推定値から、干渉波信号46がもたらす推定値の最大誤差である最大推定誤差を定量する。表示手段14は、推定手段13で推定された推定値と、最大誤差評価手段11で定量された最大推定誤差とを総合して表示することによって、測位装置41の使用者に提供する。
【0164】
本実施の形態においても、第2または第3の実施の形態で説明したように、比例係数Λ、またはΛΛTを解析的に求めて最大誤差評価手段11を構成することによって、計算量を削減することができる。
【0165】
以上のように本実施の形態の測位装置41によれば、多数の干渉波信号46が存在する実際の観測環境下で、電波信号45を用いてトランスポンダ43の位置を測定するとともに、干渉波信号46がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置41の使用者に提供することができる。また最大誤差評価手段11として、第2または第3の実施の形態の最大誤差評価手段11を用いることによって、前述の推定値および最大推定誤差をより少ない計算量で提供することができる。
【0166】
本実施の形態では干渉波信号をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様の方法で、最大誤差評価手段11を構成してもよい。
【0167】
<第7の実施の形態>
次に本発明の第7の実施の形態の測位装置について説明する。本実施の形態の測位装置は、前述の図4に示す第6の実施の形態の測位装置41を、3次元空間内の位置を測定する測位装置に拡張したものである。本実施の形態の測位装置は、測定する位置が、3次元空間内の位置であること以外は、第6の実施の形態の測位装置41と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0168】
前述の第6の実施の形態の測位装置41は、式(42)において、第nトランスポンダ43の位置を表すベクトルとして、2次元ベクトルrnを用い、第m測位装置用アンテナ42の位置を表すベクトルとして、2次元ベクトルsmを用いている。この式(42)において、第nトランスポンダ43の位置を表す2次元ベクトルrnおよび第m測位装置用アンテナ42の位置を表す2次元ベクトルsmを、それぞれ3次元ベクトルに変更することによって、第6の実施の形態における測位装置41を、容易に3次元空間内の位置を測定する測位装置に拡張することができる。このようにして第6の実施の形態の測位装置41を、3次元空間内の位置を測定する測位装置に拡張したものが、本実施の形態の測位装置である。
【0169】
本実施の形態の測位装置においても、同一直線上でない3つの位置に設置された測位装置用アンテナ42によって、トランスポンダ43の位置を一意に決定することができる。
【0170】
本実施の形態の測位装置によれば、第6の実施の形態の測位装置41と同様の効果が達成される。具体的には、多数の微弱な干渉波信号46、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号45を用いてトランスポンダ43の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置の使用者に提供することができる。
【0171】
<第8の実施の形態>
次に本発明の第8の実施の形態の測位装置について説明する。本実施の形態の測位装置は、トランスポンダ43の位置に代えて、測位装置の位置を測定すること以外は、前述の図4に示す第6の実施の形態の測位装置41、または前述の第7の実施の形態の測位装置と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。以下では、本実施の形態の測位装置についても、「測位装置41」という場合がある。
【0172】
前述の第6および第7の実施の形態では、位置を測定したい地点にトランスポンダ43を設置し、トランスポンダ43の位置を測位装置41によって測定する。本実施の形態では、位置座標が判明している複数の地点にトランスポンダ43を設置し、測位装置41の位置を、その測位装置41によって測定する。この場合、測位システム40は、測位装置41と複数のトランスポンダ43とを備えて構成される。
【0173】
トランスポンダ43は、無線装置として構成しても電波反射器として構成してもよいが、観測した電波信号45から複数のトランスポンダ43を識別できるように構成する。たとえば、トランスポンダ43を無線装置として構成する場合は、複数の種類のトリガ信号を用意し、特定のトリガ信号に対して特定のトランスポンダ43のみが応答信号として電波信号45を返すようにするか、または1種類のトリガ信号に対して、トランスポンダ43毎に固有の応答信号を電波信号45として返すようにする。トランスポンダ43を電波反射器として構成する場合は、たとえば、測位装置41の測位装置用アンテナ42に指向性をもたせ、1回の計測で、測位装置41から見て特定の方向にあるトランスポンダ43の応答信号のみを電波信号45として受信できるようにする。
【0174】
本実施の形態では、各トランスポンダ43と測位装置41の測位装置用アンテナ42との間の電波信号の伝播時間によって、各トランスポンダ43と測位装置41との間の距離が計測される。測位装置41は、位置座標が判明している少なくとも2つ以上のトランスポンダ43との間の距離を計測することによって、自装置の位置、すなわち測位装置41の位置を特定することができる。
【0175】
以上のように本実施の形態の測位装置41によれば、多数の微弱な干渉波信号、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号45を用いて測位装置41の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置41の使用者に提供することができる。
【0176】
<第9の実施の形態>
次に本発明の第9の実施の形態の測位装置について説明する。本実施の形態では、電波信号の到来時刻差を利用した測位装置について説明する。図5は、本発明の第9の実施の形態である測位装置51を含む測位システム50の構成を模式的に示す図である。測位システム50は、測位装置51および送信機53を備えて構成される。本実施の形態の測位装置51は、前述の第1の実施の形態の測定装置1を適用した測位装置である。したがって測位装置51は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。本実施の形態では、測位装置51は、モデル誤差として、微弱な干渉波信号56の影響を考慮する。
【0177】
測位装置51は、3つ以上の異なる位置に、測位装置用アンテナ52を備える。換言すれば、測位装置51は、測位装置用アンテナ52を3つ以上備え、これらの測位装置用アンテナ52は、異なる位置に設けられる。測位装置用アンテナ52は、前述の図1に示す観測手段12に備えられる。
【0178】
送信機53は、送信機用アンテナ54を備える。送信機53は、位置を測定したい地点に設置される。測位システム50では、1つの測位装置51に対して、複数の送信機53がそれぞれ異なる位置に設置されていてもよい。図5では、理解を容易にするために、1つの送信機53を備える測位システム50を図示しているが、送信機53は、2つ以上備えられてもよい。
【0179】
測位装置用アンテナ52は、送信機53から送信される電波信号55を受信する。本実施の形態では、送信機53から送信される電波信号55を受信するとき、各測位装置用アンテナ52で受信された電波信号55である受信信号に、微弱な干渉波信号56が重畳するとする。電波信号55は光速cで伝播するので、各測位装置用アンテナ52で受信された電波信号55である受信信号は、送信機53と各測位装置用アンテナ52との距離に応じて、遅れをもつ。
【0180】
今、送信機53が電波信号55を送信した正確な時刻は未知であるから、1つの測位装置用アンテナ52によって受信信号の遅れを測定することはできない。しかし、複数の測位装置用アンテナ52間での受信信号の遅れの差は測定することができる。すなわち、測位装置用アンテナ52と送信機53との距離は測定できないが、送信機53と予め定める1つの測位装置用アンテナ52との距離、および送信機53と予め定める他の測位装置用アンテナ52との距離の差は測定することができる。
【0181】
本実施の形態では、2つの測位装置用アンテナ52で受信信号の遅れの差を測定することによって、送信機53の位置を1本の双曲線上に限定することができる。したがって、相異なる2つの測位装置用アンテナ52のペアで受信信号の遅れの差を計測することによって、送信機53の位置を一意に推定することができる。
【0182】
ここで、送信機53の個数をNとおき、各送信機53を添字nで区別する。たとえば複数の送信機53のうち、n個目の送信機53を第n送信機53という。測位システム50が送信機53を1つ備える場合には、この送信機53を第1送信機53という。また測位装置用アンテナ52の個数をMとおき、各測位装置用アンテナ52を添字mで区別する。たとえば3つ以上の測位装置用アンテナ52のうち、m個目の測位装置用アンテナ52を第m測位装置用アンテナ52という。また第n送信機53の位置座標を、2次元ベクトルで表してrnとおく。また、各測位装置用アンテナ52の位置座標を同じく2次元ベクトルで表してsmとおく。
【0183】
このとき、第m測位装置用アンテナ52での受信信号zm(k)は、第n送信機53の送信信号55をwn(t)として、以下の式(43)で表される。ただし、式(43)において、hはサンプリング周期であり、vm(k)は第m測位装置用アンテナ52に重畳する干渉波信号であり、αm,nは第n送信機53から第m測位装置用アンテナ52への伝播係数であり、xm(k)は複素ガウス雑音である。
【0184】
【数43】
【0185】
z1(k)からzM(k)を縦に並べた行列をz(k)として、受信信号zの従う確率密度関数f〜は、r1からrNを並べた行列をrとし、第m測位装置用アンテナ52での雑音の標準偏差をσmとし、σ1からσMを縦に並べた行列をσとすると、以下の式(44)で表される。ただし、式(44)におけるum(k)は、以下の式(45)で定義される。
【0186】
【数44】
【0187】
【数45】
【0188】
式(44)および式(45)におけるum(k)とは、u(k)の第m要素を意味する。モデル誤差が無いときの理想的な確率密度関数fは、式(45)においてv=0としたときの式(44)の確率密度関数f〜に等しい。
【0189】
ここで、式(44)に示す確率密度関数f〜を用いて、前述の第1の実施の形態と同様にして、最大誤差評価手段11を構成しようとすると問題が生じる。式(43)から判るとおり、wnとαm,nとには任意性があり、全く同じz(k)を与える複数のαm,nとwnとの組合せがあり得る。また送信機53の送信信号wnは連続信号であるので、離散的にサンプリングされた受信信号z(k)から、送信信号wnを一意に推定することはできない。このことは、まずwn(k)のパラメトライズを無限次元にし、さらに第1の実施の形態の式(6)におけるΩ22が特異行列となり、逆行列が計算できなくなるという問題を生じさせる。
【0190】
電波信号の到来時刻差を利用した測位装置において、送信機53の位置rnを推定する公知の手段においては、本実施の形態のように受信信号zを実際の観測信号としたときの確率密度関数fを最大化するr,α,σ,wを求めるのではなく、別の手段によってrだけを推定する。したがって、前述の逆行列は、そもそも計算する必要が無い。しかし、本実施の形態において、前述の第1の実施の形態に従い最大誤差評価手段11を構成するときには、前述の逆行列を計算する必要があるので、障害となる。
【0191】
そこで、まず式(43)の両辺を離散フーリエ変換する。離散フーリエ変換をすると、以下の式(46)に示すように表される。ただし、zm^はzmの離散フーリエ変換を表し、wn^はwnの離散フーリエ変換を表し、vm^はvmの離散フーリエ変換を表し、xm^はxmの離散フーリエ変換を表す。「zm^」、「wn^」、「vm^」および「xm^」は、記号zm、wn、vmおよびxmの上に記号「∧」をそれぞれ付した記号を表す。
【0192】
【数46】
【0193】
式(46)によって、w^(k)は離散信号となるので、前述の第1の実施の形態におけるζの一部としてパラメトライズすることが可能となる。
【0194】
次に、式(44)および式(45)に示す確率密度関数f〜を、以下の式(47)および式(48)に示すように表す。
【0195】
【数47】
【0196】
【数48】
【0197】
本実施の形態において、測位装置51の観測手段12は、送信機53から送信された電波信号55を受信する。推定手段13は、たとえば前述の参考文献1に記載の公知の手段によって、観測手段12で受信された電波信号55である受信信号から、少なくとも送信機53の位置を推定する。最大誤差評価手段11は、観測信号z(k)から高速フーリエ変換などを用いてz^(l)を計算し、第1の実施の形態で説明した方法によって、モデル誤差が推定値に与える最大の誤差である最大推定誤差を定量する。高速フーリエ変換は、前述の参考文献3に記載の公知の手法によって行うことができる。最大推定誤差の定量には、第1の実施の形態で説明した方法に代えて、第2または第3の実施の形態で説明した方法を適用してもよい。
【0198】
第1〜第3の実施の形態の方法を適用する場合、確率密度関数f〜としては、式(47)および式(48)で表される確率密度関数f〜を用いる。また第1の実施の形態の式(6)におけるΩ22が特異行列になる問題に対し、比例係数Λの計算をするにあたって、式(8)を以下の式(49)に示すように変形する。ただし、Ω+22とは、Ω22のMoore-Penrose型の擬似逆行列を意味する。Moore-Penrose型の擬似逆行列は、たとえば前述の参考文献3に記載の公知の手法である特異値分解法で求めることができる。
【0199】
【数49】
【0200】
第2または第3の実施の形態の最大誤差評価手段11を本実施の形態に適用する場合、比例係数Λの定義として式(49)を採用すること以外は、第2および第3の実施の形態と同様である。
【0201】
本実施の形態の測位装置51によれば、多数の微弱な干渉波信号56が到来する環境下において、電波信号55の到来時刻差に基づいて送信機53の位置を測定するとともに、干渉波信号56がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置51の使用者に提供することができる。
【0202】
本実施の形態では、干渉波信号をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様の方法で、最大誤差評価手段を構成することができる。
【0203】
<第10の実施の形態>
次に本発明の第10の実施の形態の測位装置について説明する。本実施の形態の測位装置は、前述の図5に示す第9の実施の形態の測位装置51を、3次元空間内の位置を測定する測位装置に拡張したものである。本実施の形態の測位装置は、測定する位置が、3次元空間内の位置であること以外は、第9の実施の形態の測位装置51と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0204】
前述の第9の実施の形態の測位装置51は、第n送信機53の位置座標を表す2次元ベクトルrnおよび各測位装置用アンテナ52の位置座標を表す2次元ベクトルsmをそれぞれ3次元ベクトルとすることによって、容易に3次元空間内の位置を測定する測位装置へ拡張することができる。このようにして第9の実施の形態の測位装置51を、3次元空間内の位置を測定する測位装置に拡張したものが、本実施の形態の測位装置である。本実施の形態では、4つの相異なる位置に測位装置用アンテナ52を設置することによって、送信機53の位置を決定することができる。
【0205】
本実施の形態の測位装置によれば、第9の実施の形態の測位装置41と同様の効果が達成される。具体的には、多数の微弱な干渉波信号56、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号55を用いて送信機53の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置の使用者に提供することができる。
【0206】
<第11の実施の形態>
次に本発明の第11の実施の形態の測位装置について説明する。本実施の形態の測位装置は、送信機53の位置に代えて、測位装置の位置を測定すること以外は、前述の図5に示す第9の実施の形態の測位装置51、または前述の第10の実施の形態の測位装置と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。以下では、本実施の形態の測位装置についても、「測位装置51」という場合がある。
【0207】
前述の第9および第10の実施の形態では、位置を測定したい地点に送信機53を設置し、送信機53の位置を測位装置51によって測定する。本実施の形態では、位置座標の判明している3つ以上の地点に送信機53を設置し、位置を測定したい位置に測位装置51を設置して、測位装置51の位置を測定する。この場合、測位システム50は、位置座標の判明している3つ以上の地点に設置された送信機53と、位置を測定したい地点に設置された測位装置51とを備えて構成される。
【0208】
本実施の形態では、送信機53は、測位装置51において、各送信機53から送信される電波信号55が、どの送信機53から送信されたものかを区別できるように構成される。この構成を実現するために、送信機53は、たとえば、各送信機53がそれぞれ異なるタイミングで電波信号55を送信するか、異なる周波数で電波信号55を送信するか、または相関の小さい異なる信号を電波信号55として送信するように構成される。
【0209】
本実施の形態において、測位装置51の位置は、測位装置51と1つの送信機53との距離と、測位装置51と他の送信機53との距離との差によって、1本の双曲線上に限定される。したがって、少なくとも3つ以上の送信機53を用いることによって、測位装置51の位置を一意に決定することができる。
【0210】
本実施の形態の測位装置51によれば、多数の微弱な干渉波信号56、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号55を用いて測位装置51の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置51の使用者に提供することができる。
【0211】
<第12の実施の形態>
次に本発明の第12の実施の形態について説明する。図6は、本発明の第12の実施の形態である測角装置61の構成を模式的に示す図である。本実施の形態の測角装置61は、前述の第1の実施の形態の測定装置1を適用した測角装置である。したがって測角装置61は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測角装置61は、不図示の電波源から到来する電波信号63の到来方位を推定する。本実施の形態では、測角装置61は、モデル誤差として、微弱な多数の干渉波信号64の影響、すなわち干渉波信号64によって生じる誤差を考慮する。
【0212】
測角装置61は、複数、すなわち2つ以上の測角装置用アンテナ62を備える。複数の測角装置用アンテナ62は、近接して設置される。複数の測角装置用アンテナ62は、前述の図1に示す観測手段12に備えられる。
【0213】
測角装置61は、到来した電波信号63の到来方位を推定する。到来する電波信号63の個数をNとおき、各電波信号を添字nで区別する、たとえば、到来する複数の電波信号63のうち、n個目の電波信号63を第n電波信号63という。図6では、理解を容易にするために、電波信号63を1つ示している。この場合、この1つの電波信号63が、第1電波信号63となる。
【0214】
また測角装置用アンテナ62の個数をMとおき、各測角装置用アンテナ62を添字mで区別する。たとえば、複数の測角装置用アンテナ62のうち、m個目の測角装置用アンテナ62を第m測角装置用アンテナ62という。本実施の形態では、複数の測角装置用アンテナ62は、1つの電波信号63の受信強度が各測角装置用アンテナ62で変化せず、ベースバンド信号の波形も同じとみなせるほど近接して設置されているものとする。また本実施の形態では、モデル誤差として、各測角装置用アンテナ62で受信される電波信号63に干渉波信号64が重畳するものとする。
【0215】
ここで、測角装置61の基準位置を1つとり、その座標を2次元ベクトルs0とおく。さらに第m測角装置用アンテナ62(m=1,・・・,M)の位置座標を2次元ベクトルsmとおく。ここで、第n電波信号63を位置s0で受信したと仮定した場合の受信信号をwn(k)とおく。第n電波信号63が、xy座標平面上でx軸の正方向を0°として反時計回りに角度θの方向から到来したとすると、第m測角装置用アンテナ62での第n電波信号63の受信信号は、wn(k)に対し、以下の式(50)および式(51)で表される位相差をもつ。ただし、式(50)および式(51)において、λは電波信号63の中心周波数の波長である。
【0216】
【数50】
【0217】
【数51】
【0218】
式(50)および式(51)から、第m測角装置用アンテナ62での受信信号をzm(k)とし、z1からzMを縦に並べた行列をzとおくと、測角装置61の受信信号z(k)は、以下の式(52)および式(53)で表される。ただし、式(52)および式(53)において、w(k)はwn(k)を縦に並べた行列であり、vはvm(k)を縦に並べた行列であり、vm(k)は第m測角装置用アンテナ62で受信した干渉波信号64であり、x(k)は雑音であり、m次元複素ガウス分布に従うとみなせる。
【0219】
【数52】
【0220】
【数53】
【0221】
式(50)および式(51)から、受信信号zが従う分布の確率密度関数f〜は、以下の式(54)で表される。ただし、式(54)において、θはθnを縦に並べた行列である。
【0222】
【数54】
【0223】
モデル誤差が無い場合に受信信号zが従う理想的な確率密度関数fは、式(54)においてv=0としたときの確率密度関数f〜に等しい。
【0224】
本実施の形態において、観測手段12は、不図示の電波源から到来する電波信号63を受信する。推定手段13は、実際の受信信号をzとして、たとえば前述の参考文献1に記載の公知の手段によって、確率密度関数fを最大にするθ,σ,wのうち、少なくともθを求める。σ,wの推定値は、θから求めることができる。最大誤差評価手段11は、確率密度関数f〜に基づいて、第1の実施の形態と同様に構成される。
【0225】
本実施の形態においても、第2または第3の実施の形態のように、比例係数Λ、またはΛΛTを解析的に求めて最大誤差評価手段11を構成してよい。これによって、計算量を削減することができる。
【0226】
本実施の形態の測角装置61によれば、多数の微弱な干渉波信号64が到来する環境下においても、電波信号63の到来方位を測定するとともに、干渉波信号64がもたらす最大の測角誤差である最大推定誤差を定量し、その情報を測角装置61の使用者に提供することができる。また最大誤差評価手段11として、第2または第3の実施の形態の最大誤差評価手段11を用いることによって、推定値である前述の電波信号63の到来方位および最大推定誤差をより少ない計算量で提供することができる。
【0227】
本実施の形態では、干渉波信号をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様にして最大誤差評価手段11を構成することができる。
【0228】
<第13の実施の形態>
次に本発明の第13の実施の形態の測角装置について説明する。本実施の形態の測角装置は、前述の図6に示す第12の実施の形態の測角装置61を、3次元空間内で電波信号63の到来方位を測定する測角装置に拡張したものである。本実施の形態の測角装置は、電波信号63の到来方位を測定する範囲が3次元空間内であること以外は、第12の実施の形態の測角装置61と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0229】
本実施の形態の測角装置は、前述の第12の実施の形態の測角装置61において、測角装置用アンテナ62の位置座標smを3次元ベクトルとし、Πnを以下の式(55)で表すことによって、実現することができる。
【0230】
【数55】
【0231】
本実施の形態の測角装置は、具体的には、x軸方向の正方向を基準にxy平面上で半時計周りに方位角をとり、z軸方向に仰角をとったとき、3次元空間内で電波信号63の到来方位、具体的には方位角θおよび仰角ρを推定する。
【0232】
本実施の形態の測角装置によれば、多数の微弱な干渉波信号64、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号63を用いて電波信号63の到来方位を測定するとともに、モデル誤差がもたらす最大の測角誤差である最大推定誤差を定量し、その情報を測角装置の使用者に提供することができる。
【0233】
<第14の実施の形態>
次に本発明の第14の実施の形態の測位装置について説明する。図7は、本発明の第14の実施の形態である測位装置71を含む測位システム70の構成を模式的に示す図である。測位システム70は、測位装置71およびトランスポンダ73を備えて構成される。本実施の形態の測位装置71は、前述の第1の実施の形態の測定装置1を適用した測位装置である。したがって測位装置71は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測位装置71は、電波信号76の到来角度の推定と、到来時刻の推定とを行うことによって、トランスポンダ73の位置を測定する。
【0234】
トランスポンダ73は、位置を測定したい地点に設置される。測位システム70では、1つの測位装置71に対して、複数のトランスポンダ73がそれぞれ異なる位置に設置されていてもよい。図7では、理解を容易にするために、1つのトランスポンダ73を備える測位システム70を図示しているが、トランスポンダ73は、2つ以上備えられてもよい。
【0235】
測位装置71は、複数の測位装置用アンテナ72を備える。本実施の形態では、測位装置71は、3つの測位装置用アンテナ72を備える。複数の測位装置用アンテナ72は、近接して設置される。測位装置用アンテナ72は、前述の図1に示す観測手段12に備えられる。測位装置71は、複数の測位装置用アンテナ72のうちの少なくとも1つ、または複数の測位装置用アンテナ72以外の別のアンテナから、トリガ信号75をトランスポンダ73に向けて送信する。
【0236】
トランスポンダ73は、トランスポンダ用アンテナ74を備える。測位システム70は、前述の第4の実施の形態におけるトランスポンダ23と同様、電波信号の送受信器と増幅器とを備えた無線装置によって実現されてもよいし、単純な電波反射器によって実現されてもよい。
【0237】
本実施の形態では、モデル誤差として、個別の測位装置用アンテナ72で干渉波信号77が受信されてしまう場合を考える。トランスポンダ73は、測位装置71から送信されたトリガ信号75を受信すると、直ちに、または所定の時間βが経過した後に、測位装置71に向けて、トランスポンダ用アンテナ74を介して応答信号として電波信号76を送信する。測位装置71は、トランスポンダ73から送信された応答信号76を、複数の測位装置用アンテナ72を介して受信する。
【0238】
ここで、測位装置用アンテナ72の個数をMとおき、各測位装置用アンテナ72を添字mで区別する。たとえば複数の測位装置用アンテナ72のうち、m個目の測位装置用アンテナ72を第m測位装置用アンテナ72という。またトランスポンダ73の個数をNとおき、各トランスポンダ73を添字nで区別する。たとえば複数のトランスポンダ73のうち、n個目のトランスポンダ73を第nトランスポンダ73という。測位システム70がトランスポンダ73を1つ備える場合には、このトランスポンダ73を第1トランスポンダ73という。
【0239】
第nトランスポンダ73からの応答信号76をwn(t)とおくと、第m測位装置用アンテナ72での受信信号zm(k)は、以下の式(56)で表される。
【0240】
【数56】
【0241】
ただし、式(56)におけるs0は、測位装置71の基準位置の座標であり、smは第m測位装置用アンテナ72の座標であり、rnは第nトランスポンダ73の座標である。また式(56)におけるαnは、トランスポンダ73が無線装置で実現される場合には、第nトランスポンダ73から測位装置71の基準位置への応答信号76の伝播係数であり、トランスポンダ73が電波反射器で構成される場合には、第nトランスポンダ73から測位装置71の基準位置への応答信号76の伝播係数の自乗に、第nトランスポンダ73の反射係数を掛け合わせたものである。また式(56)におけるθnは、第nトランスポンダ73の、測位装置71の基準位置から見た方位であり、φm(θn)は、電波信号である応答信号76の到来方位によってもたらされる各測位装置用アンテナ72での位相差である。
【0242】
各測位装置用アンテナ72での位相差φm(θn)は、具体的には以下の式(57)で表される。式(57)におけるθnは、以下の式(58)で表される。式(58)におけるE1は以下の式(59)で表され、E2は以下の式(60)で表される。ただし、Πnは、式(51)と同じである。
【0243】
【数57】
【0244】
【数58】
【0245】
【数59】
【0246】
【数60】
【0247】
また式(56)において、vm(k)は、第m測位装置用アンテナ72で受信された受信信号に重畳した干渉波信号77であり、xm(k)はガウス分布に従うものとみなせる雑音である。
【0248】
以上のことから、受信信号zが従う分布の確率密度関数f〜は、以下の式(61)および式(62)で表される。ただし、式(61)および式(62)において、rはrnを並べた行列であり、σは雑音の標準偏差である。またz(k)は、z1(k)からzM(k)を縦に並べた行列であり、v(k)は、v1(k)からvM(k)を縦に並べた行列である。
【0249】
【数61】
【0250】
【数62】
【0251】
モデル誤差が無い場合に受信信号zが従う理想的な確率密度関数fは、式(61)においてv=0としたときの確率密度関数f〜に等しい。
【0252】
本実施の形態において、測位装置71の観測手段12は、トランスポンダ73から送信される応答信号76を受信する。推定手段13は、実際の受信信号をzとして、たとえば前述の参考文献1に記載の公知の手段によって、確率密度関数fを最大にするr,σのうち、少なくともrを求める。σの推定値はrから求めることができる。最大誤差評価手段11は、確率密度関数f〜に基づいて、第1の実施の形態と同様に構成される。
【0253】
本実施の形態においても、第1の実施の形態の最大誤差評価手段11に代えて、第2または第3の実施の形態の最大誤差評価手段11を用いてもよい。
【0254】
本実施の形態の測位装置71によれば、多数の微弱な干渉波信号77が到来する環境下においても、トランスポンダ73の位置を測定するとともに、干渉波信号77がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置71の使用者に提供することができる。
【0255】
本実施の形態では、干渉波信号77をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様にして、最大誤差評価手段11を構成することができる。
【0256】
<第15の実施の形態>
次に本発明の第15の実施の形態の測位装置について説明する。本実施の形態の測位装置は、前述の図7に示す第14の実施の形態の測位装置71を、3次元空間内でトランスポンダ73の位置を測定する測位装置に拡張したものである。本実施の形態の測位装置は、3次元空間内で位置を測定すること以外は、第14の実施の形態の測位装置71と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0257】
本実施の形態の測位装置は、前述の第14の実施の形態の測位装置71において、第m測位装置用アンテナ72の位置座標を表す2次元ベクトルsmおよび第nトランスポンダ73の位置座標を表す2次元ベクトルrnをそれぞれ3次元ベクトルとし、Πnを前述の第13の実施の形態において式(55)で示されるΠnとし、さらに第nトランスポンダ73の方位角をθnとし、仰角をρnとすることによって、容易に実現することができる。
【0258】
本実施の形態の測位装置によれば、第14の実施の形態の測位装置71と同様の効果が達成される。具体的には、多数の微弱な干渉波信号77が到来する環境下、および観測手段12の製造誤差などが存在する状況下でも、電波信号である応答信号76を用いてトランスポンダ73の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差を最大推定誤差として定量し、その情報を測位装置の使用者に提供することができる。
【0259】
<第16の実施の形態>
次に本発明の第16の実施の形態の測位装置について説明する。図8は、本発明の第16の実施の形態であるに測位装置81を含む測位システム80の構成を模式的に示す図である。測位システム80は、測位装置81および送信機83を備えて構成される。本実施の形態の測位装置81は、前述の第1の実施の形態の測定装置1を適用した測位装置である。したがって測位装置81は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測位装置81は、送信機83の位置を測定する。本実施の形態では、測位装置81は、モデル誤差として、微弱な多数の干渉波信号86の影響を考慮する。
【0260】
測位システム80では、複数の測位装置81が、十分に離隔した位置に設置される。図8では、理解を容易にするために、2つの測位装置81を備える測位システム80を図示しているが、測位装置81は、3つ以上備えられてもよい。各測位装置81は、複数の測位装置用アンテナ82を備える。各測位装置81において、複数の測位装置用アンテナ82は、近接して設置される。各測位装置81は、少なくとも2つ以上の測位装置用アンテナ82を備える。図8では、各測位装置81が、3つの測位装置用アンテナ82を備える場合を図示している。測位装置用アンテナ82は、前述の図1に示す観測手段12に備えられる。測位装置81は、各測位装置用アンテナ82を介して、送信機83から送信される電波信号85を受信する。
【0261】
送信機83は、送信機用アンテナ84を備える。送信機83は、位置を測定したい地点に設置される。図8では、理解を容易にするために、1つの送信機83を備える測位システム80を図示しているが、測位システム80は、複数の送信機83を備えて構成され、各送信機83が異なる位置に設置されていてもよい。
【0262】
本実施の形態では、測位装置81が、各測位装置用アンテナ82を介して、送信機83から送信される電波信号85を受信するときに、モデル誤差として、多数の微弱な干渉波信号86も受信してしまう場合を考える。
【0263】
ここで、測位装置81の個数をLとおき、各測位装置81を添字エル(l)で区別する。たとえば複数の測位装置81のうち、l個目の測位装置81を第l測位装置81という。また第l測位装置81に備えられる測位装置用アンテナ82の個数をMlとおき、各測位装置用アンテナ82を添字mで区別する。たとえば複数の測位装置用アンテナ82のうち、m個目の測位装置用アンテナ82を第m測位装置用アンテナ82という。また送信機83の個数をNとおき、各送信機83を添字nで区別する。たとえば複数の送信機83のうち、n個目の送信機83を第n送信機83という。測位システム80が送信機83を1つ備える場合には、この送信機83を第1送信機83という。
【0264】
第l測位装置81の基準となる座標を1つ決め、それをblとおく。さらに第l測位装置81の第m測位装置用アンテナ82の位置をrl,mとおくと、第l測位装置81の第m測位装置用アンテナ82での受信信号zl,m(k)は、以下の式(63)で表される。ただし、式(63)において、wl,nは、第l測位装置81の基準位置での受信信号であり、vl,mは干渉波信号であり、xl,mはガウス分布に従うものとみなせる雑音である。
【0265】
【数63】
【0266】
また、式(63)におけるφl,m(θl,n)、θl,nおよびΠl,nは、それぞれ以下の式(64)、式(65)および式(66)で表される。
【0267】
【数64】
【0268】
【数65】
【0269】
【数66】
【0270】
式(63)〜式(66)から、受信信号zが従う分布の確率密度関数f〜は、以下の式(67)で表される。
【0271】
【数67】
【0272】
ただし、式(67)において、rはrnを並べた行列であり、σはσlを並べた行列であり、σlは第l測位装置81での雑音の標準偏差である。また、zはzlを並べた行列であり、zlはzl,mを並べた行列である。wはwlを並べた行列であり、wlはwl,mを並べた行列である。vはvlを並べた行列であり、vlはvl,mを並べた行列である。
【0273】
さらに、式(67)におけるAlは、以下の式(68)で表される。
【0274】
【数68】
【0275】
モデル誤差が無い場合に受信信号zが従う理想的な分布の確率密度関数fは、式(67)においてv=0としたときの確率密度関数f〜に等しい。
【0276】
本実施の形態において、測位装置81の観測手段12は、送信機83から送信された電波信号85を受信する。推定手段13は、実際の受信信号をzとして、たとえば前述の参考文献1に記載の公知の手段によって、確率密度関数fを最大にするθ,σ,wのうち、少なくともθを求める。σ,wの推定値は、θの推定値から求めることができる。最大誤差評価手段11は、確率密度関数f〜に基づいて、第1の実施の形態と同様に構成される。
【0277】
本実施の形態においても、第2または第3の実施の形態のように、比例係数Λ、またはΛΛTを解析的に求めて最大誤差評価手段11を構成してもよい。これによって、計算量を削減することができる。
【0278】
本実施の形態の測位装置81によれば、多数の微弱な干渉波信号86が到来する環境下においても、送信機83の位置を測定するとともに、干渉波信号86がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置81の使用者に提供することができる。
【0279】
本実施の形態では、干渉波信号86をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様にして最大誤差評価手段11を構成することができる。
【0280】
<第17の実施の形態>
次に本発明の第17の実施の形態の測位装置について説明する。本実施の形態の測位装置は、前述の図8に示す第16の実施の形態の測位装置81を、3次元空間内で送信機83の位置を測定する測位装置に拡張したものである。本実施の形態の測位装置は、3次元空間内で位置を測定すること以外は、第16の実施の形態の測位装置81と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0281】
本実施の形態の測位装置は、第16の実施の形態の測位装置81において、座標を3次元ベクトルで取扱い、角度を方位角と仰角とで取扱うように構成することによって、容易に実現することができる。
【0282】
本実施の形態の測位装置によれば、第16の実施の形態の測位装置81と同様の効果が達成される。具体的には、多数の微弱な干渉波信号86および観測手段12の製造誤差などのモデル誤差が存在する状況下においても、送信機83の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差を最大推定誤差として定量し、その情報を測位装置の使用者に提供することができる。
【0283】
以上の各実施の形態では、誤差情報として、モデル誤差によって推定量に生じる推定誤差の最大値である最大推定誤差が提供される。これに限定されず、測定装置は、モデル誤差量を誤差情報として提供するように構成されてもよく、最大推定誤差とモデル誤差量との両方を誤差情報として提供するように構成されてもよい。最大推定誤差とモデル誤差量との両方を提供するように構成される場合、測定装置は、たとえば図1に示すモデル誤差量推定手段18から表示手段14にモデル誤差量を出力し、表示手段14によって表示すように構成される。モデル誤差量を提供するように構成される場合には、測定装置は、たとえば図1に示す最大誤差評価手段11に代えて、モデル誤差量推定手段18を備えるように構成される。
【符号の説明】
【0284】
1 測定装置、11 最大誤差評価手段、12 観測手段、13 推定手段、14 表示手段、15 比例係数計算手段、16 推定モデル記憶手段、17 最大誤差計算手段、18 モデル誤差量推定手段、19 センサ、20 測距システム、21 測距装置、22 測距装置用アンテナ、23,43,73 トランスポンダ、24,44,74 トランスポンダ用アンテナ、25,75 トリガ信号、26,45,55,76,85 応答信号(電波信号)、27,46,56,64,77,86 干渉波信号、32 I検波器、34 Q検波器、40,50,70,80 測位システム、41,51,71,81 測位装置、42,52,72,82 測位装置用アンテナ、51 測位装置、53,83 送信機、54,84 送信機用アンテナ、61 測角装置、62 測角装置用アンテナ、63 電波信号。
【技術分野】
【0001】
本発明は、測定すべき測定情報を測定する測定装置に関し、より詳細には、電波信号を用いて、電波信号の発信源の方位、発信源までの距離および発信源の位置のうち、少なくとも1つを測定する測定装置に関する。
【背景技術】
【0002】
電波信号を用いて、電波信号の発信源の方位、発信源までの距離および発信源の位置のうち、少なくとも1つを測定する測定装置としては、非特許文献1に記載の測角装置、測距装置および測位装置が知られている。
【0003】
測角装置は、近接して配置された複数のアンテナを用いて電波信号を受信し、その受信信号から電波信号の到来方位を推定する。測距装置は、送信機から送信された電波信号または電波反射器で反射された反射波信号を受信し、その受信信号から送信機または電波反射器までの距離を測定する。測位装置としては、複数の測位手段を用いて電波発信機の位置を測定するもの、複数のアンテナを用いて、アンテナ間における電波信号の到来時刻の差を利用して電波発信機の位置を測定するもの、測距装置と測角装置とを組合せて電波発信機の位置を測定するもの、ならびに複数の測角装置を組合せて電波発信機の位置を測定するものが知られている。
【0004】
このような電波信号を用いて方位、距離および位置などを測定する測定装置では、観測量である受信信号に熱雑音が重畳し、測定結果に誤差をもたらす。そこで、電波信号を用いた測定装置では、熱雑音がガウス分布に従うことを利用し、複数回の観測を行い、それらの観測結果を総合することで、熱雑音による誤差を低減して、方位などの測定対象を推定する推定手段を設けている。
【0005】
たとえば特許文献1には、電波信号を用いた測角装置が開示されているが、この測角装置も、ガウス分布に従う雑音が観測信号に重畳していることを前提とし、そのような観測信号から電波信号の到来方位を推定する推定手段を有している。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2004−361377号公報
【非特許文献】
【0007】
【非特許文献1】齋藤忠夫、立川敬二著、「新版 移動通信ハンドブック」、第1版、株式会社オーム社、2000年11月25日、p.507−509
【発明の概要】
【発明が解決しようとする課題】
【0008】
前述の特許文献1などに開示される推定手段を構成するためには、まず、観測量の統計的性質が、ある関数によって表現されることを仮定する。この関数は、推定したい量、つまり電波信号の発信源の方位、発信源までの距離、および発信源の位置などのうちの少なくともいずれか1つと、熱雑音との統計的性質を表現する確率変数から、観測量の統計的性質を表現する確率変数への関数である。この関数は、観測環境および観測装置をモデル化する関数であるので、以下の説明では「モデル関数」という。
【0009】
実際に観測された観測量の標本が、厳密にモデル関数で表されるような統計的性質を有しているならば、適切な観測手段を用いて十分に多数の標本を観測し、それらを総合して推定することによって、熱雑音による推定誤差を無視できるほどに小さくすることができることが知られている。電波信号を用いた測定装置は、この事実に基づいて、方位、距離および位置などの推定を行う。
【0010】
前記事実が成り立つためには、実際の観測環境および観測装置が厳密に、そのモデル関数に従うモデルである推定モデルと一致していなければならない。しかし空間を伝播する電波信号は、物体によって反射または回折を起こすので、アンテナは、発信源からの直接波のみを計測できるわけではない。また、高周波を扱う発信装置および受信装置を、厳密に、誤差を生じさせることなく製作することも困難である。つまり、実際の観測環境および観測装置は、推定モデルからの誤差を有し、その観測量には、モデル関数からの誤差であるモデル誤差が含まれる。
【0011】
従来の電波信号を用いた測定装置では、モデル誤差が無視し得るほど小さいことを暗黙の前提としている。この従来の電波信号を用いた測定装置では、モデル誤差がどの程度小さければ問題が無く、どの程度大きければ問題となるのかという情報は提供されない。また、予想されるモデル誤差がどの程度の推定誤差を生むのかに関する情報も提供されない。
【0012】
測定装置の使用者にとって、実際の観測環境および観測装置がどの程度のモデル誤差を有するのかは未知である。前述のように従来の電波信号を用いた測定装置では、モデル誤差およびそれによって生じる推定誤差に関する情報は提供されないので、測定装置の使用者が、推定された量がどの程度の誤差を有するのかについて知り得ないという問題がある。
【0013】
本発明の目的は、測定すべき測定情報を推定するときに、測定情報に生じる誤差に関する情報を使用者に提供可能な測定装置を提供することである。
【課題を解決するための手段】
【0014】
本発明の測定装置は、測定すべき測定情報に関係する関係情報を取得する取得手段と、前記取得手段によって取得された前記関係情報に基づいて、前記測定情報を推定する推定手段と、前記推定手段によって推定された前記測定情報に含まれる誤差を表す誤差情報を求める誤差評価手段と、前記推定手段によって推定された前記測定情報、および前記誤差評価手段によって求められた前記誤差情報を表示する表示手段とを備えることを特徴とする。
【発明の効果】
【0015】
本発明の測定装置によれば、測定すべき測定情報に関係する関係情報が取得手段によって取得され、取得された関係情報に基づいて、測定情報が推定手段によって推定される。また推定された測定情報に含まれる誤差を表す誤差情報が誤差評価手段によって求められる。推定手段によって推定された測定情報、および誤差評価手段によって求められた誤差情報が、表示手段によって表示される。これによって、測定情報を推定手段で推定するときに、測定情報に生じる誤差に関する誤差情報を使用者に提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の第1の実施の形態である測定装置1の構成を示すブロック図である。
【図2】本発明の第4の実施の形態である測距装置21を含む測距システム20の構成を模式的に示す図である。
【図3】観測手段12の構成を示すブロック図である。
【図4】本発明の第6の実施の形態である測位装置41を含む測位システム40の構成を模式的に示す図である。
【図5】本発明の第9の実施の形態である測位装置51を含む測位システム50の構成を模式的に示す図である。
【図6】本発明の第12の実施の形態である測角装置61の構成を模式的に示す図である。
【図7】本発明の第14の実施の形態である測位装置71を含む測位システム70の構成を模式的に示す図である。
【図8】本発明の第16の実施の形態であるに測位装置81を含む測位システム80の構成を模式的に示す図である。
【発明を実施するための形態】
【0017】
<第1の実施の形態>
図1は、本発明の第1の実施の形態である測定装置1の構成を示すブロック図である。測定装置1は、測定すべき測定情報を測定する。測定情報は、たとえば距離などの物理量である。本実施の形態において測定装置1は、電波信号を用いて、その電波信号の発信源に関する物理量を測定情報として測定する。本実施の形態では、測定装置1は、電波信号の発信源の方位、発信源までの距離および発信源の位置のうちの少なくともいずれか1つを測定する。以下では、電波信号の発信源の方位を、電波信号の到来方位という場合がある。
【0018】
測定装置1は、最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。最大誤差評価手段11は、誤差評価手段に相当する。観測手段12は、取得手段に相当する。測定装置1は、たとえば測角装置、測距装置または測位装置として使用される。本実施の形態の測定装置1を適用した測角装置、測距装置および測位装置については、それぞれ後述の実施の形態で説明する。
【0019】
観測手段12は、測定情報に関係する関係情報を取得する。本実施の形態では、観測手段12は、電波信号を受信する受信手段によって実現され、電波信号を観測する。観測手段12は、受信した電波信号から関係情報を取得する。本実施の形態では、測定情報として、電波信号の発信源の方位、発信源までの距離および発信源の位置のうち、少なくともいずれか1つが測定されるので、関係情報としては、たとえば電波信号の発信源からの到達時間、複数の発信源から到来した電波信号間の位相差などが取得される。観測手段12によって観測された電波信号は、推定手段13で処理される。
【0020】
推定手段13は、観測手段12によって取得された関係情報に基づいて、測定情報を推定する。より詳細には、推定手段13は、関係情報をモデル化して表すモデル関数を用いて、測定情報を推定する。モデル関数に従うモデルを「推定モデル」という。本実施の形態では、推定手段13は、観測手段12によって観測された電波信号を処理することによって、電波信号の発信源に関する物理量を測定情報として推定する。具体的には、推定手段13は、電波信号の発信源の方位、発信源までの距離および発信源の位置のうち、少なくともいずれか1つを測定情報として推定する。以下、推定手段13によって推定された測定情報を「推定量」という場合がある。
【0021】
推定手段13によって推定された測定情報、すなわち方位、距離および位置などの推定量は、表示手段14によって表示される。表示手段14は、推定手段13によって推定された推定量を表示することによって、測定装置1の使用者に提供する。
【0022】
最大誤差評価手段11は、推定手段13によって推定された測定情報である推定量に含まれる誤差を表す誤差情報を求め、表示手段14に出力する。本実施の形態では、最大誤差評価手段11は、モデル誤差によって推定量に生じ得る推定誤差の最大値(以下「最大推定誤差」という場合がある)を求める。ここで、モデル誤差とは、観測手段12によって取得された関係情報である観測量に含まれるモデル関数からの誤差である。また推定誤差とは、モデル誤差によって推定量に生じた誤差である。
【0023】
具体的には、最大誤差評価手段11は、推定手段13によって推定された方位、距離および位置などの推定量を用い、また必要に応じてセンサ19から与えられる情報を用いて、前記誤差情報として、前記推定量に生じる最大の推定誤差である最大推定誤差を定量し、表示手段14に出力する。センサ19からの情報が必要な場合および必要でない場合の具体例については、後述する。表示手段14は、推定手段13によって推定された推定量に加え、最大誤差評価手段11によって定量された誤差情報、本実施の形態では最大推定誤差を総合して表示することによって、測定装置1の使用者に提供する。
【0024】
最大誤差評価手段11は、比例係数計算手段15、推定モデル記憶手段16、最大誤差計算手段17およびモデル誤差量推定手段18を備える。推定モデル記憶手段16は、観測手段12によって観測される電波信号などの観測量をモデル化する関数であるモデル関数を、推定モデルとして記憶する。比例係数計算手段15は、推定モデル記憶手段16に記憶された推定モデルと、推定手段13によって推定された推定量とから、モデル誤差と、モデル誤差によって推定量に生じる誤差である推定誤差との比例係数、すなわちモデル誤差から推定誤差への比例係数を計算する。
【0025】
モデル誤差量推定手段18は、モデル誤差の量(以下「モデル誤差量」という)を推定する。モデル誤差量推定手段18は、必要に応じてセンサ19から与えられる情報を用いて、モデル誤差量を推定する。最大誤差計算手段17は、モデル誤差量推定手段18が推定したモデル誤差量と、比例係数計算手段15で計算した比例係数とから、最大の推定誤差、すなわち推定量の最大誤差を定量する。以下では、定量された最大誤差の量を「最大誤差量」という場合がある。
【0026】
以下では、最大誤差評価手段11に含まれる各構成要素について、詳細に解説する。
【0027】
まず、最大誤差評価手段11を構成するに先立ち、モデル誤差をベクトルηでパラメトライズ、すなわち媒介変数表示し、考慮するモデル誤差の集合Eγを以下の式(1)で表す。以下では、モデル誤差を「モデル誤差η」という場合がある。
【0028】
【数1】
【0029】
式(1)において、符号γは、モデル誤差ηの大きさを定める閾値を示す。式(1)に示すベクトルηのpノルムは、以下の式(2)で定義される。
【0030】
【数2】
【0031】
式(1)および式(2)において、符号pは、1もしくは2の整数、または無限大(∞)を示す。式(2)において、ηiは、ベクトルηの第i要素を表し、|ηi|は、ηiの絶対値を意味する。また、ηが0のとき、モデル誤差が無いとする。
【0032】
推定手段13によって推定される推定量は、測定装置1が何に適用されるかによって異なる。推定量は、たとえば測定装置1が測角装置として用いられる場合には方位であり、測距装置として用いられる場合には距離であり、測位装置として用いられる場合には位置である。測定装置1の適用先によっては、これらの推定量を推定するときに、雑音の分散および電波信号の強度などを同時に推定する場合がある。また複数の発信源の方位、距離および位置などを推定するときに、そのうちの一部の推定量に関する推定誤差のみを定量したい場合もある。
【0033】
そこで方位、距離および位置、またはその一部など、推定誤差を定量したい推定量をベクトルξでパラメトライズし、推定誤差を定量しない推定量をベクトルζでパラメトライズする。様々な推定量をどのようにパラメトライズするかは、測定量および測定方法に依存するので、本実施の形態では説明せず、後述の実施の形態で具体的なパラメトライズを例示する。
【0034】
また観測手段12によって観測される観測量の統計的性質を、確率変数Yによって表す。観測手段12による実際の観測値、すなわち確率変数Yの標本からベクトルξおよびベクトルζが推定できることから、確率変数Yが従う分布は、ベクトルξおよびベクトルζに依存して変化するはずである。またモデル誤差ηによって推定値に誤差が生じることから、確率変数Yが従う分布は、モデル誤差ηにも依存しているはずである。そこで、モデル誤差ηが無いときに確率変数Yが従う分布の確率密度関数をf(y,ξ,ζ)と表現し、モデル誤差ηがあるときに確率変数Yが従う分布の確率密度関数をf〜(y,ξ,ζ,η)と表現する。ただし、f〜(y,ξ,ζ,0)=f(y,ξ,ζ)とする。「f〜」は、記号「f」の上に記号「〜」を付した記号を表す。
【0035】
推定モデル記憶手段16は、推定モデルであるモデル関数として、確率密度関数f〜を記憶する。推定モデル記憶手段16は、半導体メモリなどを用いて、確率密度関数f〜の関数形を所定の値として記憶している。記憶する具体的な方法は任意であり、最低限、y,ξ,ζ,ηを与えたときに、その確率密度関数f〜が計算できればよい。たとえば、推定モデル記憶手段16は、y,ξ,ζ,ηから確率密度関数f〜を計算する計算機プログラムの形で、確率密度関数f〜を記憶する。
【0036】
比例係数計算手段15は、推定モデル記憶手段16に記憶した確率密度関数f〜と、推定手段13によって推定したベクトルξ,ζの推定値ξest,ζestとから、以下の式(3)で定義される行列要素Ξi(y)を、ベクトルξの全ての要素ξiに関して横に並べた行列Ξ(y)を構成する。
【0037】
【数3】
【0038】
同様に、比例係数計算手段15は、ベクトルζの全ての要素ζiに関して、以下の式(4)で定義される行列要素φi(y)を横に並べた行列Φ(y)を構成する。また比例係数計算手段15は、ベクトルηの全ての要素ηiに関して、以下の式(5)で定義される行列要素ψi(y)を横に並べた行列Ψ(y)を構成する。
【0039】
【数4】
【0040】
【数5】
【0041】
その上で、比例係数計算手段15は、以下の式(6)および式(7)で定義される行列を計算する。式(6)および式(7)において、Eは期待値作用素である。比例係数計算手段15は、期待値を、確率変数Yがモデル誤差の無い理想的な分布に従うものとして計算する。
【0042】
【数6】
【0043】
【数7】
【0044】
最後に、比例係数計算手段15は、以下の式(8)で定義される行列Λを計算する。この行列Λが、比例係数計算手段15の出力となる。
【0045】
【数8】
【0046】
前述のように推定モデル記憶手段16において確率密度関数f〜が計算機プログラムの形で記憶されている場合、比例係数計算手段15において、期待値の計算は、マルコフ連鎖モンテカルロ法を用いて行われ、マルコフ連鎖モンテカルロ法の各ステップにおける微分の計算は、数値微分を用いて行われる。数値微分については、S.Diop,J.W.Grizzle,F.Chaplais“On Numerical Differentiation Algorithms for Nonlinear Estimation”Proc. Of IEEE Conf. Decision and Control,2000.(以下「参考文献1」という)に記載の公知の方法を用いることができる。またマルコフ連鎖モンテカルロ法については、伊庭幸人、外5名、「統計科学のフロンティア(第12巻)計算統計II〜マルコフ連鎖モンテカルロ法とその周辺」、第1版、株式会社岩波書店、2005年10月28日、p.8−13(以下「参考文献2」という)に記載の公知の方法を用いることができる。
【0047】
ここで、ベクトルξのモデル誤差ηが生む推定誤差をdξとおくと、推定誤差dξは以下の式(9)の関係を満たす。
【0048】
【数9】
【0049】
式(9)においてOは、ランダウの漸近表記であり、推定誤差dξの各要素とΛηの各要素との相違が、モデル誤差ηの2ノルムの2乗の定数倍以下であることを示す。したがって、モデル誤差ηが十分に小さければ、推定誤差dξはΛηで近似することができる。つまり行例Λは、モデル誤差ηから推定誤差dξへの比例係数である。
【0050】
以上のように比例係数計算手段17は、推定モデル記憶手段16に記憶された確率密度関数f〜と、推定手段13によって推定された推定値ξest,ζestとを用いて、モデル誤差ηから推定誤差dξへの比例係数である行列Λ(以下「比例係数Λ」という場合がある)を計算する。
【0051】
前述のように推定誤差dξは式(9)の関係を満たすので、モデル誤差ηがモデル誤差集合Eγに含まれている場合に、モデル誤差ηによって生じる推定誤差dξの最大値(以下「最大推定誤差」という場合がある)は、以下の式(10)および式(11)で近似的に評価することができる。具体的には、モデル誤差集合Eγを表す式(1)における符号pが1または2(p=1またはp=2)のときには、最大推定誤差は、以下の式(10)で近似的に評価することができる。式(1)における符号pが∞(p=∞)のときには、最大推定誤差は、以下の式(11)で近似的に評価することができる。式(10)および式(11)において、符号qは、1もしくは2の整数、または∞を示す。式(11)において、符号nは、行列Λの列数を示す。
【0052】
【数10】
【0053】
【数11】
【0054】
式(10)および式(11)の右辺は、pとqとに応じて、表1に示すように計算することができる。表1では、式(10)または式(11)の右辺で表される最大推定誤差の近似的な評価を、pとqとの組合せ毎に示す。
【0055】
【表1】
【0056】
表1において、符号mは、行列Λの行数を示す。また、表1に示される行列Λの1ノルム、2ノルムおよび無限大ノルムは、それぞれ以下の式(12)、式(13)および式(14)で表される。
【0057】
【数12】
【0058】
【数13】
【0059】
【数14】
【0060】
式(13)において、σmax(Λ)は、行列Λの最大特異値を意味する。最大特異値は、たとえばW.H.Press,S.A.Teukolsky,W.T.Vetterling,B.P.Flannery著、丹慶勝市、奥村晴彦、佐藤俊郎、小林誠訳、「Numerical Recipes in C[日本語版]C言語による数値計算のレシピ」、初版、株式会社技術評論社、2001年11月1日、p.73−85,p.386−p.391(以下「参考文献3」という)に記載の公知の手段で計算することができる。
【0061】
表1に示される評価のうち、p=q=1およびp=q=2の2つの項目以外の評価は、保守的な評価である。
【0062】
モデル誤差量推定手段18は、前述の式(1)に示すモデル誤差ηの大きさを定める閾値γを推定することによって、前述のモデル誤差量を推定する。最も簡単な閾値γの推定は、所定の定数を出力することである。換言すれば、モデル誤差量推定手段18は、最も簡単には、閾値γとして所定の定数を出力することによって、閾値γを推定する。この場合、測定装置1はセンサ19を必要としない。
【0063】
モデル誤差量推定手段18は、観測手段12によって観測される電波信号(以下「観測信号」という場合がある)から閾値γを推定してもよいし、センサ19を用いて閾値γを推定してもよい。観測信号から閾値γを推定する場合は、観測手段12が、センサ19と同等の機能、すなわち電波環境を計測してモデル誤差量推定手段18に与える機能を果たすので、センサ19を設ける必要はない。したがって測定装置1は、センサ19を備えなくてもよい。
【0064】
最大誤差計算手段17は、比例係数計算手段15で求めた比例係数である行列Λと、モデル誤差量推定手段18で推定した閾値γとを用いて、表1に記載の評価値の1つまたは複数を計算し、最大推定誤差として出力する。
【0065】
以上のようにして、最大誤差評価手段11によって、モデル誤差集合Eγに含まれるモデル誤差ηに対する最大推定誤差を定量することができる。これによって、測定装置1は、測定情報を推定手段13によって推定するときに、測定情報である推定量に生じた誤差に関する誤差情報を測定装置1の使用者に提供することができる。具体的には、測定装置1は、モデル誤差ηによって、推定値にどのくらいの推定誤差が生じているかという情報を、測定装置1の使用者に提供することができる。したがって、本実施の形態の測定装置1によれば、実際の観測環境および観測装置がもつモデル誤差ηが未知の場合、たとえば多数の微弱な干渉波信号が存在する環境下で測定する場合、および観測手段12に製造誤差がある場合でも、モデル誤差ηが生む最大の推定誤差を定量し、その情報を測定装置1の使用者に提供することができる。
【0066】
また本実施の形態の測定装置1は、観測手段12によって電波信号を受信し、受信した電波信号に基づいて、推定手段13によって測定情報を推定する。本実施の形態の測定装置1によれば、このように電波信号を用いて測定情報を推定する場合に、測定情報に生じる誤差に関する情報を測定装置1の使用者に提供することができる。
【0067】
<第2の実施の形態>
次に本発明の第2の実施の形態の測定装置について説明する。本実施の形態の測定装置は、最大誤差評価手段11における処理が異なること以外は、前述の第1の実施の形態の測定装置1と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0068】
本実施の形態では、最大誤差評価手段11において、比例係数Λを推定値ξest,ζestを含んだ形で解析的に解いておく。本実施の形態において、推定モデル記憶手段16は、半導体メモリなどで構成され、推定値ξest,ζestから比例係数Λを計算するプログラムを記憶している。推定モデルである確率密度関数f〜は、比例係数Λを計算するプログラムに組込まれることになる。したがって推定モデル記憶手段16が、比例係数Λを計算するプログラムを記憶することは、確率密度関数f〜を記憶することに相当する。
【0069】
比例係数計算手段15は、計算機などのプログラム実行装置によって実現され、推定モデル記憶手段16に記憶されたプログラムを用いて比例係数Λを計算する。モデル誤差量推定手段18および最大誤差計算手段17は、第1の実施の形態と同様に構成される。
【0070】
以上のように本実施の形態では、最大誤差評価手段11は、推定モデル記憶手段16に、推定値ξest,ζestから比例係数Λを計算するプログラムを記憶している。そして、最大誤差評価手段11は、比例係数計算手段15によって、推定モデル記憶手段16に記憶されたプログラムを用いて比例係数Λを計算する。これによって、第1の実施の形態の最大誤差評価手段11の比例係数計算手段15におけるマルコフ連鎖モンテカルロ法および数値微分を用いた計算を省略することができる。したがって、第1の実施の形態に比べて、測定装置全体が必要とする計算量を削減することができる。
【0071】
<第3の実施の形態>
次に本発明の第3の実施の形態の測定装置について説明する。本実施の形態の測定装置は、最大誤差評価手段11における処理が異なること以外は、前述の第1および第2の実施の形態の測定装置1と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0072】
前述の第2の実施の形態では、前述の表1に示すpおよびqが2(p=q=2)の場合でも、最大誤差評価手段11において、比例係数Λを推定値ξest,ζestを含んだ形で解析的に解いておく。これに対し、本実施の形態では、pおよびqが2(p=q=2)の場合には、最大誤差評価手段11において、以下の式(15)で表される行列を、推定値ξest,ζestを含んだ形で解析的に解いておく。
【0073】
【数15】
【0074】
推定モデル記憶手段16は、半導体メモリなどで構成され、推定値ξest,ζestから式(15)で表される行列を計算するプログラムを記憶している。推定モデルである確率密度関数f〜は、式(15)で表される行列を計算するプログラムに組込まれることになる。したがって推定モデル記憶手段16が、式(15)で表される行列を計算するプログラムを記憶することは、確率密度関数f〜を記憶することに相当する。
【0075】
比例係数計算手段15は、計算機などのプログラム実行装置によって実現され、推定モデル記憶手段16に記憶されたプログラムを用いて、式(15)で表される行列を計算する。モデル誤差量推定手段18は、第1の実施の形態と同様に構成される。最大誤差計算手段17は、本実施の形態では、比例係数Λの最大特異値σmax(Λ)が式(15)の最大固有値の自乗根と等しいことを利用して、式(15)から最大特異値σmax(Λ)を計算する。
【0076】
比例係数Λは、推定誤差を評価したい推定量の個数分の行数と、モデル誤差のパラメータηの次元分の列数を持つ行列である。モデル誤差のパラメータηの次元は大きいので、比例係数Λは列方向に大きな行列となる。これに対し、式(15)で表される行列は、推定誤差を評価したい推定量の個数に等しい列数および行数を持つ正方行列であるので、比例係数Λに比べて有意に小さな行列である。
【0077】
本実施の形態において、最大誤差評価手段11は、式(15)で表される行列を計算するので、大きな行列Λを直接計算せずに最大推定誤差を求めることができる。これによって、前述の第2の実施の形態の測定装置に比較して、測定装置全体が必要とする計算量をさらに削減することができる。
【0078】
<第4の実施の形態>
次に本発明の第4の実施の形態について説明する。図2は、本発明の第4の実施の形態である測距装置21を含む測距システム20の構成を模式的に示す図である。測距システム20は、測距装置21およびトランスポンダ23を備えて構成される。本実施の形態の測距装置21は、前述の第1の実施の形態の測定装置1を適用した測距装置である。したがって測距装置21は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測距装置21は、電波信号を用いて2つの地点間の距離を測定する。本実施の形態では、測距装置21は、モデル誤差として、微弱な干渉波信号27の影響、すなわち干渉波信号27によって生じる誤差を考慮する。
【0079】
測距システム20では、1つの測距装置21に対して、複数のトランスポンダ23がそれぞれ異なる位置に設けられてもよい。本実施の形態では、理解を容易にするために、2つのトランスポンダ23を備える測距システム20について説明するが、トランスポンダ23は、3つ以上備えられてもよい。
【0080】
測距装置21は、測距装置用アンテナ22を備える。測距装置用アンテナ22は、前述の図1に示す観測手段12に備えられる。各トランスポンダ23は、トランスポンダ用アンテナ24を備える。測距装置21およびトランスポンダ23は、距離を測定したい2つの地点にそれぞれ設置される。さらに具体的には、測距装置21およびトランスポンダ23は、測距装置用アンテナ22とトランスポンダ用アンテナ24とが、距離を測定したい2つの地点と正確に一致するように設置される。
【0081】
測距システム20は、以下の手順で動作する。まず測距装置21が、各トランスポンダ23に向けて、測距装置用アンテナ22を介してトリガ信号25を送信する。各トランスポンダ23は、測距装置21から送信されたトリガ信号25をトランスポンダ用アンテナ24で受信する。トランスポンダ23は、測距装置21から送信されたトリガ信号25を受信すると、直ちに、または所定の時間βが経過した後に、測距装置21に向けて、トランスポンダ用アンテナ24を介して応答信号26を送信する。測距装置21は、各トランスポンダ23から送信された応答信号26を、測距装置用アンテナ22を介して受信する。本実施の形態では、測距装置21が応答信号26を受信するときに、微弱な干渉波信号27も同時に受信してしまうものとする。
【0082】
トランスポンダ23は、電波信号の送受信器と増幅器とを備えた無線装置によって実現されてもよいし、単純な電波反射器によって実現されてもよい。トランスポンダ23が無線装置によって実現される場合、トリガ信号25と応答信号26とは、異なっていてもよいし、同じであってもよい。トランスポンダ23が電波反射器によって実現される場合、トリガ信号25が電波反射器であるトランスポンダ23で反射された信号が応答信号26であり、前記所定の時間βは0である。
【0083】
本実施の形態では、トランスポンダ23の個数をNとおき、各トランスポンダ23を添字nで区別する。たとえば複数のトランスポンダ23のうち、n個目のトランスポンダ23を第nトランスポンダ23という。電波信号は光速cで伝播するので、測距装置21がトリガ信号25を送信してから応答信号26を受信するまでの経過時間は、測距装置21と第nトランスポンダ23との間の距離をlnとして、以下の式(16)で表される。
【0084】
【数16】
【0085】
したがって、干渉波信号が無い理想的な条件下で測距装置21が受信した受信信号、具体的には応答信号26をIQ(In Phase-Quadrant Phase)検波した標本z(k)は、トランスポンダ23が送信する応答信号26をw(t)として、以下の式(17)で表現することができる。式(17)において、符号hはサンプリング周期を示し、x(k)は雑音を示す。
【0086】
【数17】
【0087】
第nトランスポンダ23が無線装置で実現される場合、式(17)におけるαnは、第nトランスポンダ23から測距装置21への応答信号26である電波信号の複素伝播係数を意味する。第nトランスポンダ23が電波反射器で実現される場合、式(17)におけるαnは、第nトランスポンダ23から測距装置21への応答信号26である電波信号の複素伝播係数の自乗に、第nトランスポンダ23の反射係数を掛け合わせたものを意味する。
【0088】
ここでx(k)は複素ガウス分布に従うものとみなせるので、干渉波信号が無い理想的な状況下では、受信信号z(k)の従う分布の確率密度関数fは、以下の式(18)で表現することができる。式(18)におけるu(k)は、以下の式(19)で定義される。式(18)および式(19)において、符号lは、測距装置21とトランスポンダ23との間の距離(以下、単に「距離」という場合がある)を示し、測距装置21と第nトランスポンダ23との間の距離lnを縦に並べたベクトルで表される。またαは、トランスポンダ23から測距装置21への電波信号の伝播係数(以下、単に「伝播係数」という場合がある)を示し、第nトランスポンダ23から測距装置21への電波信号の複素伝播係数αnを縦に並べたベクトルで表される。またσは、雑音の標準偏差を示す。
【0089】
【数18】
【0090】
【数19】
【0091】
本実施の形態において、観測手段12は、トランスポンダ23からの電波信号である応答信号26を受信し、受信した応答信号26をIQ検波し、複素デジタル標本zとして出力する。推定手段13は、推定値として、標本zを実際の受信信号としたときの確率密度関数fを最大にするような距離l、伝播係数αおよび標準偏差σのうち、少なくとも距離lを求める。距離lを求める方法としては、たとえば前述の参考文献1に記載の公知の方法を用いることができる。伝播係数αおよび標準偏差σの推定値は、距離lの推定値から求めることができる。
【0092】
次に、干渉波信号v(k)が存在する場合を考える。干渉波信号v(k)が存在する場合、受信信号z(k)は以下の式(20)で表される。
【0093】
【数20】
【0094】
本実施の形態の測距装置21では、干渉波信号の最大電力がγ2程度であるという想定のもと、前述の第1の実施の形態で説明した最大誤差評価手段11を用いて、干渉波信号による最大の推定誤差を定量することができる。
【0095】
受信信号に干渉波信号が重畳する場合の受信信号zが従う分布の確率密度関数f〜は、以下の式(21)で表される。式(21)におけるu(k)は、以下の式(22)で定義される。
【0096】
【数21】
【0097】
【数22】
【0098】
ここでy,ξ,ζ,ηを、以下の式(23)、式(24)、式(25)および式(26)に示すようにおく。
【0099】
【数23】
【0100】
【数24】
【0101】
【数25】
【0102】
【数26】
【0103】
式(23)〜式(26)に示すようにy,ξ,ζ,ηをおくと、ξ,ζ,ηに依存するyの確率密度関数f〜は、以下の式(27)で表される。式(27)におけるu(ξ,ζ)は、以下の式(28)で定義される。
【0104】
【数27】
【0105】
【数28】
【0106】
式(23)〜式(26)におけるzr,αr,vrは、それぞれz,α,vの実部を表し、zi,αi,viはそれぞれz,α,vの虚部を表す。
【0107】
式(24)では、式(22)におけるlnの全てをξとしているが、式(22)におけるlnのうちの一部だけをξとし、残りをζに含めてもよい。また干渉波信号の総電力がγ2であることから、モデル誤差のノルムはp=2である。あとは第1の実施の形態と同様に最大誤差評価手段11を構成する。
【0108】
<第4の実施の形態の第1変形例>
次に、測距装置21の最大誤差評価手段11として、第1の実施の形態における最大誤差評価手段11に代えて、第2の実施の形態における最大誤差評価手段11を適用した測距装置について説明する。第2の実施の形態における最大誤差評価手段11を用いることによる前述の計算量の低減効果をより明確に示すために、標本数Kが十分大きく、応答信号w(t)が近似的に定常な信号の場合を考える。この場合、比例係数Λは以下の手順で計算することができる。
【0109】
まず応答信号26を表す関数w(t)の微分をd(t)として、関数w(t)の全ての要素を並べた行列Wおよび微分d(t)の全ての要素を並べた行列Dを、それぞれ以下の式(29)および式(30)に示すようにおく。
【0110】
【数29】
【0111】
【数30】
【0112】
さらに関数w(t)の自己相関関数をRw,w(t)として、自己相関関数Rw,w(t)の全ての要素を並べた行列Sw,wを、以下の式(31)に示すようにおく。
【0113】
【数31】
【0114】
また関数w(t)の微分d(t)と関数w(t)との相互相関関数をRd,w(t)とし、微分d(t)の自己相関関数をRd,d(t)として、相互相関関数Rd,w(t)の全ての要素を並べた行列Sd,wおよび微分d(t)の自己相関関数Rd,d(t)の全ての要素を並べた行列Sd,dを式(31)と同様におく。このとき、αnを対角に並べた行列をAとし、以下の式(32)で表される行列の実部および虚部をそれぞれGr,Giとおく。
【0115】
【数32】
【0116】
さらに式(33)で表される行列をFとする。
【0117】
【数33】
【0118】
このとき干渉波信号vがもたらす推定誤差は、以下の式(34)で表される。
【0119】
【数34】
【0120】
ただし、vrは干渉波信号v(k)の実部をk=0からk=K−1まで縦に並べた行列であり、viは干渉波信号v(k)の虚部をk=0からk=K−1まで縦に並べた行列である。したがって、比例係数Λは以下の式(35)で表される。
【0121】
【数35】
【0122】
式(35)で表される比例係数Λの計算は、第1の実施の形態の比例係数計算手段15におけるマルコフ連鎖モンテカルロ法と数値微分法とを用いた計算よりも、大幅に計算量が少ない。したがって、測距装置21の最大誤差評価手段11として、第1の実施の形態における最大誤差評価手段11に代えて、第2の実施の形態における最大誤差評価手段11を適用することによって、第1の実施の形態に比べて、測定装置全体が必要とする計算量を削減することができる。
【0123】
<第4の実施の形態の第2変形例>
次に、測距装置21の最大誤差評価手段11として、第1の実施の形態における最大誤差評価手段11に代えて、第3の実施の形態における最大誤差評価手段11を適用した測距装置について説明する。p=q=2として第3の実施の形態で説明した最大誤差評価手段11を第4の実施の形態に適用する場合、最大誤差評価手段11は、式(15)で表される行列として、以下の式(36)で表される行列F-1を計算すればよい。
【0124】
【数36】
【0125】
式(36)の形から明らかなように、式(36)を計算する方が、前述の第1変形例で用いられる式(35)を計算するよりも、計算量が少なくなっている。したがって、測距装置21の最大誤差評価手段11として、第3の実施の形態における最大誤差評価手段11を用いることによって、第2の実施の形態における最大誤差評価手段11を用いた第1変形例の測定装置に比較して、測定装置全体が必要とする計算量をさらに削減することができる。
【0126】
第4の実施の形態において、観測手段12は、トランスポンダ23からの応答信号26を受信する。推定手段13は、観測手段12によって受信された応答信号26から、受信機である測距装置21とトランスポンダ23との距離l、伝播係数αおよび雑音の標準偏差σを推定する。伝播係数αおよび雑音の標準偏差σの推定値は、距離lの推定値から計算できるので、推定手段13は、少なくとも距離lを推定できればよい。
【0127】
また距離lの推定値は、確率密度関数fを最大にする距離lとして特徴づけられるが、必ずしも確率密度関数fを最大化することによって距離lを求める必要はない。推定手段13は、確率密度関数fを最大にするような距離l、または十分精度の良いその近似値を求める公知の手段を用いて、距離lの推定値を求めればよい。距離lの推定値を求める公知の手段としては、たとえば前述の参考文献1に記載される手段を用いることができる。
【0128】
最大誤差評価手段11は、少なくとも推定手段13が推定した距離lの推定値から、総電力γ2以下の干渉波信号が推定値に与える最大の誤差である最大推定誤差を定量し、表示手段14に与える。表示手段14は、推定手段13で推定された推定値と、最大誤差評価手段11で定量された最大推定誤差とを、総合して表示することによって、測距装置21の使用者に提供する。
【0129】
最大誤差評価手段11において、推定モデル記憶手段16は、確率密度関数f〜を計算するプログラムを記憶する。比例係数計算手段15は、推定モデル記憶手段16に記憶された確率密度関数f〜を形成するプログラムを用いて、第1の実施の形態における最大誤差評価手段11と同様にして、比例係数Λを求める。このとき、推定誤差を定量すべき推定量は、測距装置21と全てのトランスポンダ23との間の距離としてもよいし、測距装置21と一部のトランスポンダ23との間の距離としてもよい。
【0130】
モデル誤差量推定手段18は、たとえば所定の値を閾値γとして出力するか、推定手段13によって推定した雑音の標準偏差σを閾値γとして出力するか、またはセンサ19を用いて電波環境を計測して干渉波信号の総電力γ2を推定して閾値γを出力することによって、モデル誤差量を推定する。所定の値を閾値γとして出力する場合は、センサ19は必要ではない。標準偏差σを閾値γとして出力する場合は、観測手段12および推定手段13がセンサ19と同様の機能を果たすので、センサ19は必要ではない。
【0131】
最大誤差計算手段17は、モデル誤差量推定手段18によって推定した閾値γと、比例係数計算手段15によって計算した比例係数Λとから、最大推定誤差の定量値として、表1のp=2、q=1、2または∞の各量のうち少なくともいずれか1つを計算して出力する。
【0132】
第1変形例のように、測距装置21の最大誤差評価手段11として第2の実施の形態で説明した最大誤差評価手段11を用いる場合、推定モデル記憶手段16は、式(35)に従って比例係数Λを計算するプログラムを記憶するように構成される。比例係数計算手段15は、推定モデル記憶手段16に記憶されたプログラムを実行する計算機などのプログラム実行装置として構成される。
【0133】
第2変形例のように、p=q=2として、測距装置21の最大誤差評価装置11として第3の実施の形態で説明した最大誤差評価手段11を用いる場合、推定モデル記憶手段16は、式(36)に従ってΛΛTを計算するプログラムを記憶するように構成される。比例係数計算手段15は、推定モデル記憶手段16に記憶された前記プログラムを実行して式(36)で表される行列ΛΛTを求める。最大誤差計算手段17は、比例係数計算手段15で求めた前記ΛΛTから最大推定誤差を計算する。
【0134】
本実施の形態の測距装置21によれば、様々な干渉波信号が存在する環境下において、離れた2つの地点間の距離を、電波信号を用いて計測するだけでなく、干渉波信号が距離の推定値に与える最大推定誤差を定量し、その情報を測距装置21の使用者に提供することができる。また第1および第2変形例のように、第2または第3の実施の形態で説明した最大誤差評価手段11を用いることによって、最大推定誤差をより少ない計算量で提供することができる。したがって、前述のように最大推定誤差を定量して使用者に提供することのできる測距装置21を、より簡単な構成で実現することができる。
【0135】
<第5の実施の形態>
次に本発明の第5の実施の形態の測距装置について説明する。本実施の形態の測距装置は、前述の図2に示す第4の実施の形態の測距装置21において、モデル誤差として、干渉波信号27によって生じる誤差ではなく、観測手段12の製造誤差を考慮した構成になっている。本実施の形態の測距装置は、考慮するモデル誤差が観測手段12の製造誤差であること以外は、前述の第4の実施の形態の測距装置21と同様であるので、異なる部分について説明し、同様の説明を省略する。
【0136】
本実施の形態の測距装置は、第4の実施の形態の測距装置21と同様、図2に示すトランスポンダ23とともに測距システム20を構成する。本実施の形態の測距装置は、第4の実施の形態と同様、前述の第1の実施の形態の測定装置1を適用した測距装置である。したがって本実施の形態の測距装置は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。
【0137】
図3は、観測手段12の構成を示すブロック図である。観測手段12は、具体的には、測距装置用アンテナ22、第1増幅器31、I検波器32、第2増幅器32およびQ検波器34を備えて構成される。観測手段12は、測距装置用アンテナ22を介して、トランスポンダ23から送信された応答信号26を受信する。受信された応答信号26は、第1増幅器31および第2増幅器33に与えられ、各増幅器31,32で増幅される。第1増幅器31で増幅された信号は、I検波器32に与えられ、I検波器32でI検波が行われる。第2増幅器33で増幅された信号は、Q検波器34に与えられ、Q検波器34でQ検波が行われる。I検波器32によってI検波された信号およびQ検波器34によってQ検波された信号は、推定手段13に与えられる。
【0138】
本実施の形態では、観測手段12の製造誤差によって、推定手段13に与えられる信号の実部および虚部にそれぞれ、乗法的にゲイン誤差が重畳する場合を考える。I検波器32には、第1増幅器31に起因するゲインが与えられ、Q検波器34には、第2増幅器33に起因するゲインが与えられる。この結果、受信信号z(k)は、ゲイン誤差の実部のパラメータをbrとし、虚部のパラメータをbiとして、以下の式(37)で表される。
【0139】
【数37】
【0140】
式(37)において、符号jは、虚数単位を表す。αnrは、式(17)に示す複素伝播係数αnの実部を表し、αniは、式(17)に示す複素伝播係数αnの虚部を表す。ω、k、h、ln、c、βおよびx(k)は、式(17)と同様である。製造時の規格として、式(37)におけるゲイン誤差のパラメータbr,biは、以下の式(38)を満たすものとする。
【0141】
【数38】
【0142】
このとき、モデル誤差である観測手段12の製造誤差ηを、以下の式(39)に示すようにおき、他は前述の第4の実施の形態と同様に最大誤差評価手段11を構成する。これによって、観測手段12の製造誤差がもたらす最大の推定誤差を定量することができる。
【0143】
【数39】
【0144】
本実施の形態においても、第2または第3の実施の形態で説明したように、比例係数Λ、またはΛΛTを解析的に求めて最大誤差評価手段11を構成することによって、計算量を削減することができる。
【0145】
以上のように本実施の形態の測距装置によれば、観測手段12が製造誤差を持っている場合でも、離れた2つの地点間の距離を、電波信号を用いて推定するとともに、観測手段12の製造誤差が推定値に及ぼす最大の誤差である最大推定誤差を定量し、その情報を測距装置の使用者に提供することができる。また最大誤差評価手段11として、第2または第3の実施の形態の最大誤差評価手段11を用いることによって、前述の推定値および最大推定誤差をより少ない計算量で提供することができる。
【0146】
本実施の形態では、第4の実施の形態で示した干渉波信号に対する最大誤差評価手段11に続き、観測手段12の製造誤差に対する最大誤差評価手段11を示したが、その他のモデル誤差に対しても同様に最大誤差評価手段11を構成することができる。
【0147】
<第6の実施の形態>
次に本発明の第6の実施の形態について説明する。図4は、本発明の第6の実施の形態である測位装置41を含む測位システム40の構成を模式的に示す図である。測位システム40は、測位装置41およびトランスポンダ43を備えて構成される。本実施の形態の測位装置41は、前述の第1の実施の形態の測定装置1を適用した測位装置である。したがって測位装置41は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測位装置41は、電波信号を用いて、トランスポンダ43の位置を測定する。本実施の形態では、測位装置41は、モデル誤差として、微弱な干渉波信号46の影響、すなわち干渉波信号46によって生じる誤差を考慮する。
【0148】
トランスポンダ43は、位置を測定したい地点に設置される。測位システム40では、1つの測位装置41に対して、複数のトランスポンダ43がそれぞれ異なる位置に設置されていてもよい。図4では、理解を容易にするために、1つのトランスポンダ43を備える測位システム40を図示しているが、トランスポンダ43は、2つ以上備えられてもよい。
【0149】
測位装置41は、複数の測位装置用アンテナ42を備える。本実施の形態では、測位装置41は、3つの測位装置用アンテナ42を備える。複数の測位装置用アンテナ42は、異なる位置に設けられる。換言すると、測位装置41は、2つ以上の異なる位置に、測位装置用アンテナ42を備える。測位装置用アンテナ42は、前述の図1に示す観測手段12に備えられる。複数の測位装置用アンテナ42は、たとえば時分割でトリガ信号を送信することによって、それぞれ独立にトランスポンダ43と電波信号の送受信ができるように構成される。
【0150】
トランスポンダ43は、トランスポンダ用アンテナ44を備える。トランスポンダ43は、前述の第4の実施の形態におけるトランスポンダ23と同様、電波信号の送受信器と増幅器とを備えた無線装置によって実現されてもよいし、単純な電波反射器によって実現されてもよい。
【0151】
測位システム40は、前述の図2に示す測距システム20と同様の手順で動作する。具体的には、まず測位装置41がトランスポンダ43に向けて、各測位装置用アンテナ42を介してトリガ信号を送信する。トランスポンダ43は、測位装置41から送信されたトリガ信号をトランスポンダ用アンテナ44で受信する。トランスポンダ43は、測位装置41から送信されたトリガ信号を受信すると、直ちに、または所定の時間βが経過した後に、測位装置41に向けて、トランスポンダ用アンテナ44を介して応答信号として電波信号45を送信する。測位装置41は、トランスポンダ43から送信された電波信号45を、各測位装置用アンテナ42を介して受信する。
【0152】
トランスポンダ43が無線装置によって実現される場合、トリガ信号と応答信号である電波信号45とは、異なっていてもよいし、同じであってもよい。トランスポンダ43が電波反射器によって実現される場合、トリガ信号が電波反射器であるトランスポンダ43で反射された信号が、応答信号である電波信号45であり、前記所定の時間βは0である。
【0153】
本実施の形態では、モデル誤差ηとして干渉波信号46が、各測位装置用アンテナ42を介して受信されてしまう場合を考える。また干渉波信号46の総電力は、前述の式(1)に示すモデル誤差ηの大きさを定める閾値γの自乗γ2であるとする。
【0154】
ある測位装置用アンテナ42から等距離にある点の集合は、2次元平面上で測位装置用アンテナ42を中心とする円を描く。測位装置41が2つの測位装置用アンテナ42を備える場合、2つの測位装置用アンテナ42からトランスポンダ43までの距離をそれぞれ測定すれば、トランスポンダ43の位置は平面上の2点に限定される。この場合、事前知識として、トランスポンダ43の存在範囲が限定されていれば、2つの測位装置用アンテナ42によってトランスポンダ43の位置を決定することができる。測位装置41が3つの測位装置用アンテナ42を備える場合には、3つの測位装置用アンテナ42が同一直線上でない位置関係にあれば、3つの測位装置用アンテナ42からトランスポンダ43までの距離をそれぞれ測定することによって、平面内でトランスポンダ43の位置を一意に決定することができる。
【0155】
ここで、トランスポンダ43の個数をNとおき、各トランスポンダ43を添字nで区別する。たとえば複数のトランスポンダ43のうち、n個目のトランスポンダ43を第nトランスポンダ43という。測位システム40がトランスポンダ43を1つ備える場合には、このトランスポンダ43を第1トランスポンダ43という。また測位装置用アンテナ42の個数をMとおき、各測位装置用アンテナ42を添字mで区別する。たとえば複数の測位装置用アンテナ42のうち、m個目の測位装置用アンテナ42を第m測位装置用アンテナ42という。また第nトランスポンダ43の位置を2次元ベクトルで表現してrnとおき、第m測位装置用アンテナ42の位置を2次元ベクトルで表現してsmをおく。
【0156】
第m測位装置用アンテナ42での干渉波信号vの受信信号をvm(k)とおくと、第m測位装置用アンテナ42での受信信号zm(k)は、トランスポンダ43からの電波信号45をw(t)とし、第nトランスポンダ43からの電波信号w(t)をwn(t)とし、第m測位装置用アンテナ42で受信される雑音x(k)をxm(k)として、以下の式(40)で表される。
【0157】
【数40】
【0158】
式(40)におけるαm,nは、トランスポンダ43が無線装置で実現される場合には、第nトランスポンダ43から第m測位装置用アンテナ42への電波信号45の伝播係数であり、トランスポンダ43が電波反射器で実現される場合には、第nトランスポンダ43から第m測位装置用アンテナ42への電波信号45の伝播係数の自乗に、第nトランスポンダ43の反射係数を掛け合わせたものである。式(40)におけるk、h、cおよびβは、式(17)と同様である。
【0159】
z1(k)からzM(k)までを縦に並べた行列をz(k)として、受信信号zの従う確率密度関数は、zmがそれぞれ従う確率密度関数の積で表されるので、r1からrNまでを並べた行列をrとし、σ1からσMまでを並べた行列をσとして、受信信号zが従う分布の確率密度関数f〜は、以下の式(41)で表される。ただし、式(41)におけるum(k)は、以下の式(42)で定義される。
【0160】
【数41】
【0161】
【数42】
【0162】
ただし、式(41)および式(42)におけるum(k)は、u(k)の第m要素を意味する。モデル誤差が無いときの理想的な確率密度関数fは、式(42)においてv=0としたときの式(41)の確率密度関数f〜に等しい。
【0163】
本実施の形態において、測位装置41の観測手段12は、トランスポンダ43からの電波信号45を受信する。推定手段13は、たとえば非特許文献1に記載の公知の手段によって、観測手段12で受信した電波信号45である受信信号からトランスポンダ43の位置を推定する。最大誤差評価手段11は、第1の実施の形態で説明した方法によって、少なくとも推定手段13が推定したトランスポンダ43の位置の推定値から、干渉波信号46がもたらす推定値の最大誤差である最大推定誤差を定量する。表示手段14は、推定手段13で推定された推定値と、最大誤差評価手段11で定量された最大推定誤差とを総合して表示することによって、測位装置41の使用者に提供する。
【0164】
本実施の形態においても、第2または第3の実施の形態で説明したように、比例係数Λ、またはΛΛTを解析的に求めて最大誤差評価手段11を構成することによって、計算量を削減することができる。
【0165】
以上のように本実施の形態の測位装置41によれば、多数の干渉波信号46が存在する実際の観測環境下で、電波信号45を用いてトランスポンダ43の位置を測定するとともに、干渉波信号46がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置41の使用者に提供することができる。また最大誤差評価手段11として、第2または第3の実施の形態の最大誤差評価手段11を用いることによって、前述の推定値および最大推定誤差をより少ない計算量で提供することができる。
【0166】
本実施の形態では干渉波信号をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様の方法で、最大誤差評価手段11を構成してもよい。
【0167】
<第7の実施の形態>
次に本発明の第7の実施の形態の測位装置について説明する。本実施の形態の測位装置は、前述の図4に示す第6の実施の形態の測位装置41を、3次元空間内の位置を測定する測位装置に拡張したものである。本実施の形態の測位装置は、測定する位置が、3次元空間内の位置であること以外は、第6の実施の形態の測位装置41と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0168】
前述の第6の実施の形態の測位装置41は、式(42)において、第nトランスポンダ43の位置を表すベクトルとして、2次元ベクトルrnを用い、第m測位装置用アンテナ42の位置を表すベクトルとして、2次元ベクトルsmを用いている。この式(42)において、第nトランスポンダ43の位置を表す2次元ベクトルrnおよび第m測位装置用アンテナ42の位置を表す2次元ベクトルsmを、それぞれ3次元ベクトルに変更することによって、第6の実施の形態における測位装置41を、容易に3次元空間内の位置を測定する測位装置に拡張することができる。このようにして第6の実施の形態の測位装置41を、3次元空間内の位置を測定する測位装置に拡張したものが、本実施の形態の測位装置である。
【0169】
本実施の形態の測位装置においても、同一直線上でない3つの位置に設置された測位装置用アンテナ42によって、トランスポンダ43の位置を一意に決定することができる。
【0170】
本実施の形態の測位装置によれば、第6の実施の形態の測位装置41と同様の効果が達成される。具体的には、多数の微弱な干渉波信号46、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号45を用いてトランスポンダ43の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置の使用者に提供することができる。
【0171】
<第8の実施の形態>
次に本発明の第8の実施の形態の測位装置について説明する。本実施の形態の測位装置は、トランスポンダ43の位置に代えて、測位装置の位置を測定すること以外は、前述の図4に示す第6の実施の形態の測位装置41、または前述の第7の実施の形態の測位装置と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。以下では、本実施の形態の測位装置についても、「測位装置41」という場合がある。
【0172】
前述の第6および第7の実施の形態では、位置を測定したい地点にトランスポンダ43を設置し、トランスポンダ43の位置を測位装置41によって測定する。本実施の形態では、位置座標が判明している複数の地点にトランスポンダ43を設置し、測位装置41の位置を、その測位装置41によって測定する。この場合、測位システム40は、測位装置41と複数のトランスポンダ43とを備えて構成される。
【0173】
トランスポンダ43は、無線装置として構成しても電波反射器として構成してもよいが、観測した電波信号45から複数のトランスポンダ43を識別できるように構成する。たとえば、トランスポンダ43を無線装置として構成する場合は、複数の種類のトリガ信号を用意し、特定のトリガ信号に対して特定のトランスポンダ43のみが応答信号として電波信号45を返すようにするか、または1種類のトリガ信号に対して、トランスポンダ43毎に固有の応答信号を電波信号45として返すようにする。トランスポンダ43を電波反射器として構成する場合は、たとえば、測位装置41の測位装置用アンテナ42に指向性をもたせ、1回の計測で、測位装置41から見て特定の方向にあるトランスポンダ43の応答信号のみを電波信号45として受信できるようにする。
【0174】
本実施の形態では、各トランスポンダ43と測位装置41の測位装置用アンテナ42との間の電波信号の伝播時間によって、各トランスポンダ43と測位装置41との間の距離が計測される。測位装置41は、位置座標が判明している少なくとも2つ以上のトランスポンダ43との間の距離を計測することによって、自装置の位置、すなわち測位装置41の位置を特定することができる。
【0175】
以上のように本実施の形態の測位装置41によれば、多数の微弱な干渉波信号、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号45を用いて測位装置41の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置41の使用者に提供することができる。
【0176】
<第9の実施の形態>
次に本発明の第9の実施の形態の測位装置について説明する。本実施の形態では、電波信号の到来時刻差を利用した測位装置について説明する。図5は、本発明の第9の実施の形態である測位装置51を含む測位システム50の構成を模式的に示す図である。測位システム50は、測位装置51および送信機53を備えて構成される。本実施の形態の測位装置51は、前述の第1の実施の形態の測定装置1を適用した測位装置である。したがって測位装置51は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。本実施の形態では、測位装置51は、モデル誤差として、微弱な干渉波信号56の影響を考慮する。
【0177】
測位装置51は、3つ以上の異なる位置に、測位装置用アンテナ52を備える。換言すれば、測位装置51は、測位装置用アンテナ52を3つ以上備え、これらの測位装置用アンテナ52は、異なる位置に設けられる。測位装置用アンテナ52は、前述の図1に示す観測手段12に備えられる。
【0178】
送信機53は、送信機用アンテナ54を備える。送信機53は、位置を測定したい地点に設置される。測位システム50では、1つの測位装置51に対して、複数の送信機53がそれぞれ異なる位置に設置されていてもよい。図5では、理解を容易にするために、1つの送信機53を備える測位システム50を図示しているが、送信機53は、2つ以上備えられてもよい。
【0179】
測位装置用アンテナ52は、送信機53から送信される電波信号55を受信する。本実施の形態では、送信機53から送信される電波信号55を受信するとき、各測位装置用アンテナ52で受信された電波信号55である受信信号に、微弱な干渉波信号56が重畳するとする。電波信号55は光速cで伝播するので、各測位装置用アンテナ52で受信された電波信号55である受信信号は、送信機53と各測位装置用アンテナ52との距離に応じて、遅れをもつ。
【0180】
今、送信機53が電波信号55を送信した正確な時刻は未知であるから、1つの測位装置用アンテナ52によって受信信号の遅れを測定することはできない。しかし、複数の測位装置用アンテナ52間での受信信号の遅れの差は測定することができる。すなわち、測位装置用アンテナ52と送信機53との距離は測定できないが、送信機53と予め定める1つの測位装置用アンテナ52との距離、および送信機53と予め定める他の測位装置用アンテナ52との距離の差は測定することができる。
【0181】
本実施の形態では、2つの測位装置用アンテナ52で受信信号の遅れの差を測定することによって、送信機53の位置を1本の双曲線上に限定することができる。したがって、相異なる2つの測位装置用アンテナ52のペアで受信信号の遅れの差を計測することによって、送信機53の位置を一意に推定することができる。
【0182】
ここで、送信機53の個数をNとおき、各送信機53を添字nで区別する。たとえば複数の送信機53のうち、n個目の送信機53を第n送信機53という。測位システム50が送信機53を1つ備える場合には、この送信機53を第1送信機53という。また測位装置用アンテナ52の個数をMとおき、各測位装置用アンテナ52を添字mで区別する。たとえば3つ以上の測位装置用アンテナ52のうち、m個目の測位装置用アンテナ52を第m測位装置用アンテナ52という。また第n送信機53の位置座標を、2次元ベクトルで表してrnとおく。また、各測位装置用アンテナ52の位置座標を同じく2次元ベクトルで表してsmとおく。
【0183】
このとき、第m測位装置用アンテナ52での受信信号zm(k)は、第n送信機53の送信信号55をwn(t)として、以下の式(43)で表される。ただし、式(43)において、hはサンプリング周期であり、vm(k)は第m測位装置用アンテナ52に重畳する干渉波信号であり、αm,nは第n送信機53から第m測位装置用アンテナ52への伝播係数であり、xm(k)は複素ガウス雑音である。
【0184】
【数43】
【0185】
z1(k)からzM(k)を縦に並べた行列をz(k)として、受信信号zの従う確率密度関数f〜は、r1からrNを並べた行列をrとし、第m測位装置用アンテナ52での雑音の標準偏差をσmとし、σ1からσMを縦に並べた行列をσとすると、以下の式(44)で表される。ただし、式(44)におけるum(k)は、以下の式(45)で定義される。
【0186】
【数44】
【0187】
【数45】
【0188】
式(44)および式(45)におけるum(k)とは、u(k)の第m要素を意味する。モデル誤差が無いときの理想的な確率密度関数fは、式(45)においてv=0としたときの式(44)の確率密度関数f〜に等しい。
【0189】
ここで、式(44)に示す確率密度関数f〜を用いて、前述の第1の実施の形態と同様にして、最大誤差評価手段11を構成しようとすると問題が生じる。式(43)から判るとおり、wnとαm,nとには任意性があり、全く同じz(k)を与える複数のαm,nとwnとの組合せがあり得る。また送信機53の送信信号wnは連続信号であるので、離散的にサンプリングされた受信信号z(k)から、送信信号wnを一意に推定することはできない。このことは、まずwn(k)のパラメトライズを無限次元にし、さらに第1の実施の形態の式(6)におけるΩ22が特異行列となり、逆行列が計算できなくなるという問題を生じさせる。
【0190】
電波信号の到来時刻差を利用した測位装置において、送信機53の位置rnを推定する公知の手段においては、本実施の形態のように受信信号zを実際の観測信号としたときの確率密度関数fを最大化するr,α,σ,wを求めるのではなく、別の手段によってrだけを推定する。したがって、前述の逆行列は、そもそも計算する必要が無い。しかし、本実施の形態において、前述の第1の実施の形態に従い最大誤差評価手段11を構成するときには、前述の逆行列を計算する必要があるので、障害となる。
【0191】
そこで、まず式(43)の両辺を離散フーリエ変換する。離散フーリエ変換をすると、以下の式(46)に示すように表される。ただし、zm^はzmの離散フーリエ変換を表し、wn^はwnの離散フーリエ変換を表し、vm^はvmの離散フーリエ変換を表し、xm^はxmの離散フーリエ変換を表す。「zm^」、「wn^」、「vm^」および「xm^」は、記号zm、wn、vmおよびxmの上に記号「∧」をそれぞれ付した記号を表す。
【0192】
【数46】
【0193】
式(46)によって、w^(k)は離散信号となるので、前述の第1の実施の形態におけるζの一部としてパラメトライズすることが可能となる。
【0194】
次に、式(44)および式(45)に示す確率密度関数f〜を、以下の式(47)および式(48)に示すように表す。
【0195】
【数47】
【0196】
【数48】
【0197】
本実施の形態において、測位装置51の観測手段12は、送信機53から送信された電波信号55を受信する。推定手段13は、たとえば前述の参考文献1に記載の公知の手段によって、観測手段12で受信された電波信号55である受信信号から、少なくとも送信機53の位置を推定する。最大誤差評価手段11は、観測信号z(k)から高速フーリエ変換などを用いてz^(l)を計算し、第1の実施の形態で説明した方法によって、モデル誤差が推定値に与える最大の誤差である最大推定誤差を定量する。高速フーリエ変換は、前述の参考文献3に記載の公知の手法によって行うことができる。最大推定誤差の定量には、第1の実施の形態で説明した方法に代えて、第2または第3の実施の形態で説明した方法を適用してもよい。
【0198】
第1〜第3の実施の形態の方法を適用する場合、確率密度関数f〜としては、式(47)および式(48)で表される確率密度関数f〜を用いる。また第1の実施の形態の式(6)におけるΩ22が特異行列になる問題に対し、比例係数Λの計算をするにあたって、式(8)を以下の式(49)に示すように変形する。ただし、Ω+22とは、Ω22のMoore-Penrose型の擬似逆行列を意味する。Moore-Penrose型の擬似逆行列は、たとえば前述の参考文献3に記載の公知の手法である特異値分解法で求めることができる。
【0199】
【数49】
【0200】
第2または第3の実施の形態の最大誤差評価手段11を本実施の形態に適用する場合、比例係数Λの定義として式(49)を採用すること以外は、第2および第3の実施の形態と同様である。
【0201】
本実施の形態の測位装置51によれば、多数の微弱な干渉波信号56が到来する環境下において、電波信号55の到来時刻差に基づいて送信機53の位置を測定するとともに、干渉波信号56がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置51の使用者に提供することができる。
【0202】
本実施の形態では、干渉波信号をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様の方法で、最大誤差評価手段を構成することができる。
【0203】
<第10の実施の形態>
次に本発明の第10の実施の形態の測位装置について説明する。本実施の形態の測位装置は、前述の図5に示す第9の実施の形態の測位装置51を、3次元空間内の位置を測定する測位装置に拡張したものである。本実施の形態の測位装置は、測定する位置が、3次元空間内の位置であること以外は、第9の実施の形態の測位装置51と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0204】
前述の第9の実施の形態の測位装置51は、第n送信機53の位置座標を表す2次元ベクトルrnおよび各測位装置用アンテナ52の位置座標を表す2次元ベクトルsmをそれぞれ3次元ベクトルとすることによって、容易に3次元空間内の位置を測定する測位装置へ拡張することができる。このようにして第9の実施の形態の測位装置51を、3次元空間内の位置を測定する測位装置に拡張したものが、本実施の形態の測位装置である。本実施の形態では、4つの相異なる位置に測位装置用アンテナ52を設置することによって、送信機53の位置を決定することができる。
【0205】
本実施の形態の測位装置によれば、第9の実施の形態の測位装置41と同様の効果が達成される。具体的には、多数の微弱な干渉波信号56、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号55を用いて送信機53の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置の使用者に提供することができる。
【0206】
<第11の実施の形態>
次に本発明の第11の実施の形態の測位装置について説明する。本実施の形態の測位装置は、送信機53の位置に代えて、測位装置の位置を測定すること以外は、前述の図5に示す第9の実施の形態の測位装置51、または前述の第10の実施の形態の測位装置と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。以下では、本実施の形態の測位装置についても、「測位装置51」という場合がある。
【0207】
前述の第9および第10の実施の形態では、位置を測定したい地点に送信機53を設置し、送信機53の位置を測位装置51によって測定する。本実施の形態では、位置座標の判明している3つ以上の地点に送信機53を設置し、位置を測定したい位置に測位装置51を設置して、測位装置51の位置を測定する。この場合、測位システム50は、位置座標の判明している3つ以上の地点に設置された送信機53と、位置を測定したい地点に設置された測位装置51とを備えて構成される。
【0208】
本実施の形態では、送信機53は、測位装置51において、各送信機53から送信される電波信号55が、どの送信機53から送信されたものかを区別できるように構成される。この構成を実現するために、送信機53は、たとえば、各送信機53がそれぞれ異なるタイミングで電波信号55を送信するか、異なる周波数で電波信号55を送信するか、または相関の小さい異なる信号を電波信号55として送信するように構成される。
【0209】
本実施の形態において、測位装置51の位置は、測位装置51と1つの送信機53との距離と、測位装置51と他の送信機53との距離との差によって、1本の双曲線上に限定される。したがって、少なくとも3つ以上の送信機53を用いることによって、測位装置51の位置を一意に決定することができる。
【0210】
本実施の形態の測位装置51によれば、多数の微弱な干渉波信号56、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号55を用いて測位装置51の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置51の使用者に提供することができる。
【0211】
<第12の実施の形態>
次に本発明の第12の実施の形態について説明する。図6は、本発明の第12の実施の形態である測角装置61の構成を模式的に示す図である。本実施の形態の測角装置61は、前述の第1の実施の形態の測定装置1を適用した測角装置である。したがって測角装置61は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測角装置61は、不図示の電波源から到来する電波信号63の到来方位を推定する。本実施の形態では、測角装置61は、モデル誤差として、微弱な多数の干渉波信号64の影響、すなわち干渉波信号64によって生じる誤差を考慮する。
【0212】
測角装置61は、複数、すなわち2つ以上の測角装置用アンテナ62を備える。複数の測角装置用アンテナ62は、近接して設置される。複数の測角装置用アンテナ62は、前述の図1に示す観測手段12に備えられる。
【0213】
測角装置61は、到来した電波信号63の到来方位を推定する。到来する電波信号63の個数をNとおき、各電波信号を添字nで区別する、たとえば、到来する複数の電波信号63のうち、n個目の電波信号63を第n電波信号63という。図6では、理解を容易にするために、電波信号63を1つ示している。この場合、この1つの電波信号63が、第1電波信号63となる。
【0214】
また測角装置用アンテナ62の個数をMとおき、各測角装置用アンテナ62を添字mで区別する。たとえば、複数の測角装置用アンテナ62のうち、m個目の測角装置用アンテナ62を第m測角装置用アンテナ62という。本実施の形態では、複数の測角装置用アンテナ62は、1つの電波信号63の受信強度が各測角装置用アンテナ62で変化せず、ベースバンド信号の波形も同じとみなせるほど近接して設置されているものとする。また本実施の形態では、モデル誤差として、各測角装置用アンテナ62で受信される電波信号63に干渉波信号64が重畳するものとする。
【0215】
ここで、測角装置61の基準位置を1つとり、その座標を2次元ベクトルs0とおく。さらに第m測角装置用アンテナ62(m=1,・・・,M)の位置座標を2次元ベクトルsmとおく。ここで、第n電波信号63を位置s0で受信したと仮定した場合の受信信号をwn(k)とおく。第n電波信号63が、xy座標平面上でx軸の正方向を0°として反時計回りに角度θの方向から到来したとすると、第m測角装置用アンテナ62での第n電波信号63の受信信号は、wn(k)に対し、以下の式(50)および式(51)で表される位相差をもつ。ただし、式(50)および式(51)において、λは電波信号63の中心周波数の波長である。
【0216】
【数50】
【0217】
【数51】
【0218】
式(50)および式(51)から、第m測角装置用アンテナ62での受信信号をzm(k)とし、z1からzMを縦に並べた行列をzとおくと、測角装置61の受信信号z(k)は、以下の式(52)および式(53)で表される。ただし、式(52)および式(53)において、w(k)はwn(k)を縦に並べた行列であり、vはvm(k)を縦に並べた行列であり、vm(k)は第m測角装置用アンテナ62で受信した干渉波信号64であり、x(k)は雑音であり、m次元複素ガウス分布に従うとみなせる。
【0219】
【数52】
【0220】
【数53】
【0221】
式(50)および式(51)から、受信信号zが従う分布の確率密度関数f〜は、以下の式(54)で表される。ただし、式(54)において、θはθnを縦に並べた行列である。
【0222】
【数54】
【0223】
モデル誤差が無い場合に受信信号zが従う理想的な確率密度関数fは、式(54)においてv=0としたときの確率密度関数f〜に等しい。
【0224】
本実施の形態において、観測手段12は、不図示の電波源から到来する電波信号63を受信する。推定手段13は、実際の受信信号をzとして、たとえば前述の参考文献1に記載の公知の手段によって、確率密度関数fを最大にするθ,σ,wのうち、少なくともθを求める。σ,wの推定値は、θから求めることができる。最大誤差評価手段11は、確率密度関数f〜に基づいて、第1の実施の形態と同様に構成される。
【0225】
本実施の形態においても、第2または第3の実施の形態のように、比例係数Λ、またはΛΛTを解析的に求めて最大誤差評価手段11を構成してよい。これによって、計算量を削減することができる。
【0226】
本実施の形態の測角装置61によれば、多数の微弱な干渉波信号64が到来する環境下においても、電波信号63の到来方位を測定するとともに、干渉波信号64がもたらす最大の測角誤差である最大推定誤差を定量し、その情報を測角装置61の使用者に提供することができる。また最大誤差評価手段11として、第2または第3の実施の形態の最大誤差評価手段11を用いることによって、推定値である前述の電波信号63の到来方位および最大推定誤差をより少ない計算量で提供することができる。
【0227】
本実施の形態では、干渉波信号をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様にして最大誤差評価手段11を構成することができる。
【0228】
<第13の実施の形態>
次に本発明の第13の実施の形態の測角装置について説明する。本実施の形態の測角装置は、前述の図6に示す第12の実施の形態の測角装置61を、3次元空間内で電波信号63の到来方位を測定する測角装置に拡張したものである。本実施の形態の測角装置は、電波信号63の到来方位を測定する範囲が3次元空間内であること以外は、第12の実施の形態の測角装置61と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0229】
本実施の形態の測角装置は、前述の第12の実施の形態の測角装置61において、測角装置用アンテナ62の位置座標smを3次元ベクトルとし、Πnを以下の式(55)で表すことによって、実現することができる。
【0230】
【数55】
【0231】
本実施の形態の測角装置は、具体的には、x軸方向の正方向を基準にxy平面上で半時計周りに方位角をとり、z軸方向に仰角をとったとき、3次元空間内で電波信号63の到来方位、具体的には方位角θおよび仰角ρを推定する。
【0232】
本実施の形態の測角装置によれば、多数の微弱な干渉波信号64、および電波受信機である観測手段12の製造誤差などのモデル誤差が存在する状況下でも、電波信号63を用いて電波信号63の到来方位を測定するとともに、モデル誤差がもたらす最大の測角誤差である最大推定誤差を定量し、その情報を測角装置の使用者に提供することができる。
【0233】
<第14の実施の形態>
次に本発明の第14の実施の形態の測位装置について説明する。図7は、本発明の第14の実施の形態である測位装置71を含む測位システム70の構成を模式的に示す図である。測位システム70は、測位装置71およびトランスポンダ73を備えて構成される。本実施の形態の測位装置71は、前述の第1の実施の形態の測定装置1を適用した測位装置である。したがって測位装置71は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測位装置71は、電波信号76の到来角度の推定と、到来時刻の推定とを行うことによって、トランスポンダ73の位置を測定する。
【0234】
トランスポンダ73は、位置を測定したい地点に設置される。測位システム70では、1つの測位装置71に対して、複数のトランスポンダ73がそれぞれ異なる位置に設置されていてもよい。図7では、理解を容易にするために、1つのトランスポンダ73を備える測位システム70を図示しているが、トランスポンダ73は、2つ以上備えられてもよい。
【0235】
測位装置71は、複数の測位装置用アンテナ72を備える。本実施の形態では、測位装置71は、3つの測位装置用アンテナ72を備える。複数の測位装置用アンテナ72は、近接して設置される。測位装置用アンテナ72は、前述の図1に示す観測手段12に備えられる。測位装置71は、複数の測位装置用アンテナ72のうちの少なくとも1つ、または複数の測位装置用アンテナ72以外の別のアンテナから、トリガ信号75をトランスポンダ73に向けて送信する。
【0236】
トランスポンダ73は、トランスポンダ用アンテナ74を備える。測位システム70は、前述の第4の実施の形態におけるトランスポンダ23と同様、電波信号の送受信器と増幅器とを備えた無線装置によって実現されてもよいし、単純な電波反射器によって実現されてもよい。
【0237】
本実施の形態では、モデル誤差として、個別の測位装置用アンテナ72で干渉波信号77が受信されてしまう場合を考える。トランスポンダ73は、測位装置71から送信されたトリガ信号75を受信すると、直ちに、または所定の時間βが経過した後に、測位装置71に向けて、トランスポンダ用アンテナ74を介して応答信号として電波信号76を送信する。測位装置71は、トランスポンダ73から送信された応答信号76を、複数の測位装置用アンテナ72を介して受信する。
【0238】
ここで、測位装置用アンテナ72の個数をMとおき、各測位装置用アンテナ72を添字mで区別する。たとえば複数の測位装置用アンテナ72のうち、m個目の測位装置用アンテナ72を第m測位装置用アンテナ72という。またトランスポンダ73の個数をNとおき、各トランスポンダ73を添字nで区別する。たとえば複数のトランスポンダ73のうち、n個目のトランスポンダ73を第nトランスポンダ73という。測位システム70がトランスポンダ73を1つ備える場合には、このトランスポンダ73を第1トランスポンダ73という。
【0239】
第nトランスポンダ73からの応答信号76をwn(t)とおくと、第m測位装置用アンテナ72での受信信号zm(k)は、以下の式(56)で表される。
【0240】
【数56】
【0241】
ただし、式(56)におけるs0は、測位装置71の基準位置の座標であり、smは第m測位装置用アンテナ72の座標であり、rnは第nトランスポンダ73の座標である。また式(56)におけるαnは、トランスポンダ73が無線装置で実現される場合には、第nトランスポンダ73から測位装置71の基準位置への応答信号76の伝播係数であり、トランスポンダ73が電波反射器で構成される場合には、第nトランスポンダ73から測位装置71の基準位置への応答信号76の伝播係数の自乗に、第nトランスポンダ73の反射係数を掛け合わせたものである。また式(56)におけるθnは、第nトランスポンダ73の、測位装置71の基準位置から見た方位であり、φm(θn)は、電波信号である応答信号76の到来方位によってもたらされる各測位装置用アンテナ72での位相差である。
【0242】
各測位装置用アンテナ72での位相差φm(θn)は、具体的には以下の式(57)で表される。式(57)におけるθnは、以下の式(58)で表される。式(58)におけるE1は以下の式(59)で表され、E2は以下の式(60)で表される。ただし、Πnは、式(51)と同じである。
【0243】
【数57】
【0244】
【数58】
【0245】
【数59】
【0246】
【数60】
【0247】
また式(56)において、vm(k)は、第m測位装置用アンテナ72で受信された受信信号に重畳した干渉波信号77であり、xm(k)はガウス分布に従うものとみなせる雑音である。
【0248】
以上のことから、受信信号zが従う分布の確率密度関数f〜は、以下の式(61)および式(62)で表される。ただし、式(61)および式(62)において、rはrnを並べた行列であり、σは雑音の標準偏差である。またz(k)は、z1(k)からzM(k)を縦に並べた行列であり、v(k)は、v1(k)からvM(k)を縦に並べた行列である。
【0249】
【数61】
【0250】
【数62】
【0251】
モデル誤差が無い場合に受信信号zが従う理想的な確率密度関数fは、式(61)においてv=0としたときの確率密度関数f〜に等しい。
【0252】
本実施の形態において、測位装置71の観測手段12は、トランスポンダ73から送信される応答信号76を受信する。推定手段13は、実際の受信信号をzとして、たとえば前述の参考文献1に記載の公知の手段によって、確率密度関数fを最大にするr,σのうち、少なくともrを求める。σの推定値はrから求めることができる。最大誤差評価手段11は、確率密度関数f〜に基づいて、第1の実施の形態と同様に構成される。
【0253】
本実施の形態においても、第1の実施の形態の最大誤差評価手段11に代えて、第2または第3の実施の形態の最大誤差評価手段11を用いてもよい。
【0254】
本実施の形態の測位装置71によれば、多数の微弱な干渉波信号77が到来する環境下においても、トランスポンダ73の位置を測定するとともに、干渉波信号77がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置71の使用者に提供することができる。
【0255】
本実施の形態では、干渉波信号77をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様にして、最大誤差評価手段11を構成することができる。
【0256】
<第15の実施の形態>
次に本発明の第15の実施の形態の測位装置について説明する。本実施の形態の測位装置は、前述の図7に示す第14の実施の形態の測位装置71を、3次元空間内でトランスポンダ73の位置を測定する測位装置に拡張したものである。本実施の形態の測位装置は、3次元空間内で位置を測定すること以外は、第14の実施の形態の測位装置71と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0257】
本実施の形態の測位装置は、前述の第14の実施の形態の測位装置71において、第m測位装置用アンテナ72の位置座標を表す2次元ベクトルsmおよび第nトランスポンダ73の位置座標を表す2次元ベクトルrnをそれぞれ3次元ベクトルとし、Πnを前述の第13の実施の形態において式(55)で示されるΠnとし、さらに第nトランスポンダ73の方位角をθnとし、仰角をρnとすることによって、容易に実現することができる。
【0258】
本実施の形態の測位装置によれば、第14の実施の形態の測位装置71と同様の効果が達成される。具体的には、多数の微弱な干渉波信号77が到来する環境下、および観測手段12の製造誤差などが存在する状況下でも、電波信号である応答信号76を用いてトランスポンダ73の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差を最大推定誤差として定量し、その情報を測位装置の使用者に提供することができる。
【0259】
<第16の実施の形態>
次に本発明の第16の実施の形態の測位装置について説明する。図8は、本発明の第16の実施の形態であるに測位装置81を含む測位システム80の構成を模式的に示す図である。測位システム80は、測位装置81および送信機83を備えて構成される。本実施の形態の測位装置81は、前述の第1の実施の形態の測定装置1を適用した測位装置である。したがって測位装置81は、前述の図1に示す最大誤差評価手段11、観測手段12、推定手段13、表示手段14およびセンサ19を備えて構成される。測位装置81は、送信機83の位置を測定する。本実施の形態では、測位装置81は、モデル誤差として、微弱な多数の干渉波信号86の影響を考慮する。
【0260】
測位システム80では、複数の測位装置81が、十分に離隔した位置に設置される。図8では、理解を容易にするために、2つの測位装置81を備える測位システム80を図示しているが、測位装置81は、3つ以上備えられてもよい。各測位装置81は、複数の測位装置用アンテナ82を備える。各測位装置81において、複数の測位装置用アンテナ82は、近接して設置される。各測位装置81は、少なくとも2つ以上の測位装置用アンテナ82を備える。図8では、各測位装置81が、3つの測位装置用アンテナ82を備える場合を図示している。測位装置用アンテナ82は、前述の図1に示す観測手段12に備えられる。測位装置81は、各測位装置用アンテナ82を介して、送信機83から送信される電波信号85を受信する。
【0261】
送信機83は、送信機用アンテナ84を備える。送信機83は、位置を測定したい地点に設置される。図8では、理解を容易にするために、1つの送信機83を備える測位システム80を図示しているが、測位システム80は、複数の送信機83を備えて構成され、各送信機83が異なる位置に設置されていてもよい。
【0262】
本実施の形態では、測位装置81が、各測位装置用アンテナ82を介して、送信機83から送信される電波信号85を受信するときに、モデル誤差として、多数の微弱な干渉波信号86も受信してしまう場合を考える。
【0263】
ここで、測位装置81の個数をLとおき、各測位装置81を添字エル(l)で区別する。たとえば複数の測位装置81のうち、l個目の測位装置81を第l測位装置81という。また第l測位装置81に備えられる測位装置用アンテナ82の個数をMlとおき、各測位装置用アンテナ82を添字mで区別する。たとえば複数の測位装置用アンテナ82のうち、m個目の測位装置用アンテナ82を第m測位装置用アンテナ82という。また送信機83の個数をNとおき、各送信機83を添字nで区別する。たとえば複数の送信機83のうち、n個目の送信機83を第n送信機83という。測位システム80が送信機83を1つ備える場合には、この送信機83を第1送信機83という。
【0264】
第l測位装置81の基準となる座標を1つ決め、それをblとおく。さらに第l測位装置81の第m測位装置用アンテナ82の位置をrl,mとおくと、第l測位装置81の第m測位装置用アンテナ82での受信信号zl,m(k)は、以下の式(63)で表される。ただし、式(63)において、wl,nは、第l測位装置81の基準位置での受信信号であり、vl,mは干渉波信号であり、xl,mはガウス分布に従うものとみなせる雑音である。
【0265】
【数63】
【0266】
また、式(63)におけるφl,m(θl,n)、θl,nおよびΠl,nは、それぞれ以下の式(64)、式(65)および式(66)で表される。
【0267】
【数64】
【0268】
【数65】
【0269】
【数66】
【0270】
式(63)〜式(66)から、受信信号zが従う分布の確率密度関数f〜は、以下の式(67)で表される。
【0271】
【数67】
【0272】
ただし、式(67)において、rはrnを並べた行列であり、σはσlを並べた行列であり、σlは第l測位装置81での雑音の標準偏差である。また、zはzlを並べた行列であり、zlはzl,mを並べた行列である。wはwlを並べた行列であり、wlはwl,mを並べた行列である。vはvlを並べた行列であり、vlはvl,mを並べた行列である。
【0273】
さらに、式(67)におけるAlは、以下の式(68)で表される。
【0274】
【数68】
【0275】
モデル誤差が無い場合に受信信号zが従う理想的な分布の確率密度関数fは、式(67)においてv=0としたときの確率密度関数f〜に等しい。
【0276】
本実施の形態において、測位装置81の観測手段12は、送信機83から送信された電波信号85を受信する。推定手段13は、実際の受信信号をzとして、たとえば前述の参考文献1に記載の公知の手段によって、確率密度関数fを最大にするθ,σ,wのうち、少なくともθを求める。σ,wの推定値は、θの推定値から求めることができる。最大誤差評価手段11は、確率密度関数f〜に基づいて、第1の実施の形態と同様に構成される。
【0277】
本実施の形態においても、第2または第3の実施の形態のように、比例係数Λ、またはΛΛTを解析的に求めて最大誤差評価手段11を構成してもよい。これによって、計算量を削減することができる。
【0278】
本実施の形態の測位装置81によれば、多数の微弱な干渉波信号86が到来する環境下においても、送信機83の位置を測定するとともに、干渉波信号86がもたらす最大の測位誤差である最大推定誤差を定量し、その情報を測位装置81の使用者に提供することができる。
【0279】
本実施の形態では、干渉波信号86をモデル誤差として最大誤差評価手段11を構成したが、製造誤差などの他のモデル誤差に対しても同様にして最大誤差評価手段11を構成することができる。
【0280】
<第17の実施の形態>
次に本発明の第17の実施の形態の測位装置について説明する。本実施の形態の測位装置は、前述の図8に示す第16の実施の形態の測位装置81を、3次元空間内で送信機83の位置を測定する測位装置に拡張したものである。本実施の形態の測位装置は、3次元空間内で位置を測定すること以外は、第16の実施の形態の測位装置81と同様であるので、異なる部分について説明し、図示および同様の説明を省略する。
【0281】
本実施の形態の測位装置は、第16の実施の形態の測位装置81において、座標を3次元ベクトルで取扱い、角度を方位角と仰角とで取扱うように構成することによって、容易に実現することができる。
【0282】
本実施の形態の測位装置によれば、第16の実施の形態の測位装置81と同様の効果が達成される。具体的には、多数の微弱な干渉波信号86および観測手段12の製造誤差などのモデル誤差が存在する状況下においても、送信機83の位置を測定するとともに、モデル誤差がもたらす最大の測位誤差を最大推定誤差として定量し、その情報を測位装置の使用者に提供することができる。
【0283】
以上の各実施の形態では、誤差情報として、モデル誤差によって推定量に生じる推定誤差の最大値である最大推定誤差が提供される。これに限定されず、測定装置は、モデル誤差量を誤差情報として提供するように構成されてもよく、最大推定誤差とモデル誤差量との両方を誤差情報として提供するように構成されてもよい。最大推定誤差とモデル誤差量との両方を提供するように構成される場合、測定装置は、たとえば図1に示すモデル誤差量推定手段18から表示手段14にモデル誤差量を出力し、表示手段14によって表示すように構成される。モデル誤差量を提供するように構成される場合には、測定装置は、たとえば図1に示す最大誤差評価手段11に代えて、モデル誤差量推定手段18を備えるように構成される。
【符号の説明】
【0284】
1 測定装置、11 最大誤差評価手段、12 観測手段、13 推定手段、14 表示手段、15 比例係数計算手段、16 推定モデル記憶手段、17 最大誤差計算手段、18 モデル誤差量推定手段、19 センサ、20 測距システム、21 測距装置、22 測距装置用アンテナ、23,43,73 トランスポンダ、24,44,74 トランスポンダ用アンテナ、25,75 トリガ信号、26,45,55,76,85 応答信号(電波信号)、27,46,56,64,77,86 干渉波信号、32 I検波器、34 Q検波器、40,50,70,80 測位システム、41,51,71,81 測位装置、42,52,72,82 測位装置用アンテナ、51 測位装置、53,83 送信機、54,84 送信機用アンテナ、61 測角装置、62 測角装置用アンテナ、63 電波信号。
【特許請求の範囲】
【請求項1】
測定すべき測定情報に関係する関係情報を取得する取得手段と、
前記取得手段によって取得された前記関係情報に基づいて、前記測定情報を推定する推定手段と、
前記推定手段によって推定された前記測定情報に含まれる誤差を表す誤差情報を求める誤差評価手段と、
前記推定手段によって推定された前記測定情報、および前記誤差評価手段によって求められた前記誤差情報を表示する表示手段とを備えることを特徴とする測定装置。
【請求項2】
前記推定手段は、前記関係情報をモデル化して表すモデル関数を用いて、前記測定情報を推定し、
前記誤差評価手段は、前記取得手段によって取得された前記関係情報に含まれる前記モデル関数からの誤差であるモデル誤差から、前記モデル誤差によって前記測定情報に生じる誤差である推定誤差への比例係数を求め、求めた前記比例係数を用いて、前記モデル誤差によって前記測定情報に生じ得る推定誤差の最大値を前記誤差情報として求めることを特徴とする請求項1に記載の測定装置。
【請求項3】
前記誤差評価手段は、前記モデル誤差から前記推定誤差への比例係数を解析的に求めた結果を保持して構成され、前記解析的に求めた結果に、前記推定手段によって推定された前記測定情報を代入することによって、前記比例係数を求めることを特徴とする請求項2に記載の測定装置。
【請求項4】
前記取得手段は、電波信号を受信する受信手段であり、受信した電波信号から前記関係情報を取得することを特徴とする請求項1〜3のいずれか1つに記載の測定装置。
【請求項5】
前記取得手段は、電波信号を受信する受信手段であり、受信した電波信号から前記関係情報を取得し、
前記モデル誤差は、前記取得手段によって受信された電波信号に含まれる干渉波信号によって生じる誤差を含むことを特徴とする請求項2または3に記載の測定装置。
【請求項6】
前記取得手段は、電波信号を受信する受信手段であり、受信した電波信号から前記関係情報を取得し、
前記モデル誤差は、前記取得手段を製造するときに生じる製造誤差を含むことを特徴とする請求項2または3に記載の測定装置。
【請求項7】
前記測定情報は、前記電波信号の発信源までの距離を含むことを特徴とする請求項4〜6のいずれか1つに記載の測定装置。
【請求項8】
前記測定情報は、前記電波信号の到来方位を含むことを特徴とする請求項4〜6のいずれか1つに記載の測定装置。
【請求項9】
前記測定情報は、前記電波信号の発信源の位置を含むことを特徴とする請求項4〜6のいずれか1つに記載の測定装置。
【請求項1】
測定すべき測定情報に関係する関係情報を取得する取得手段と、
前記取得手段によって取得された前記関係情報に基づいて、前記測定情報を推定する推定手段と、
前記推定手段によって推定された前記測定情報に含まれる誤差を表す誤差情報を求める誤差評価手段と、
前記推定手段によって推定された前記測定情報、および前記誤差評価手段によって求められた前記誤差情報を表示する表示手段とを備えることを特徴とする測定装置。
【請求項2】
前記推定手段は、前記関係情報をモデル化して表すモデル関数を用いて、前記測定情報を推定し、
前記誤差評価手段は、前記取得手段によって取得された前記関係情報に含まれる前記モデル関数からの誤差であるモデル誤差から、前記モデル誤差によって前記測定情報に生じる誤差である推定誤差への比例係数を求め、求めた前記比例係数を用いて、前記モデル誤差によって前記測定情報に生じ得る推定誤差の最大値を前記誤差情報として求めることを特徴とする請求項1に記載の測定装置。
【請求項3】
前記誤差評価手段は、前記モデル誤差から前記推定誤差への比例係数を解析的に求めた結果を保持して構成され、前記解析的に求めた結果に、前記推定手段によって推定された前記測定情報を代入することによって、前記比例係数を求めることを特徴とする請求項2に記載の測定装置。
【請求項4】
前記取得手段は、電波信号を受信する受信手段であり、受信した電波信号から前記関係情報を取得することを特徴とする請求項1〜3のいずれか1つに記載の測定装置。
【請求項5】
前記取得手段は、電波信号を受信する受信手段であり、受信した電波信号から前記関係情報を取得し、
前記モデル誤差は、前記取得手段によって受信された電波信号に含まれる干渉波信号によって生じる誤差を含むことを特徴とする請求項2または3に記載の測定装置。
【請求項6】
前記取得手段は、電波信号を受信する受信手段であり、受信した電波信号から前記関係情報を取得し、
前記モデル誤差は、前記取得手段を製造するときに生じる製造誤差を含むことを特徴とする請求項2または3に記載の測定装置。
【請求項7】
前記測定情報は、前記電波信号の発信源までの距離を含むことを特徴とする請求項4〜6のいずれか1つに記載の測定装置。
【請求項8】
前記測定情報は、前記電波信号の到来方位を含むことを特徴とする請求項4〜6のいずれか1つに記載の測定装置。
【請求項9】
前記測定情報は、前記電波信号の発信源の位置を含むことを特徴とする請求項4〜6のいずれか1つに記載の測定装置。
【図1】

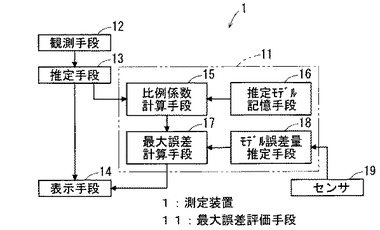
【図2】
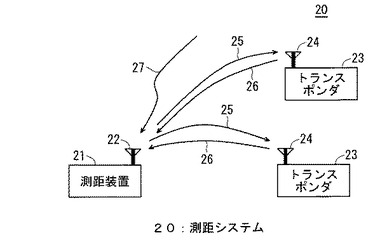
【図3】
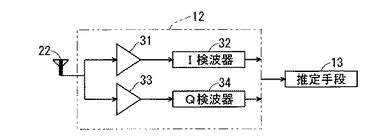
【図4】
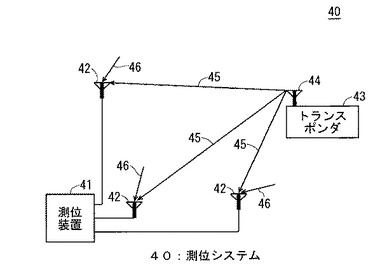
【図5】
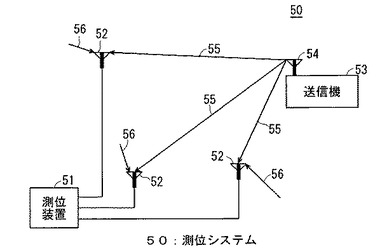
【図6】
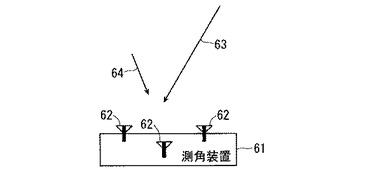
【図7】
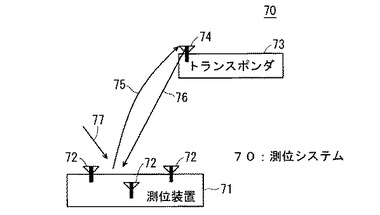
【図8】
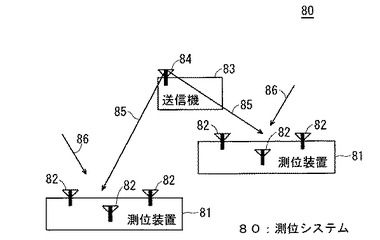
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2011−145128(P2011−145128A)
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願番号】特願2010−4842(P2010−4842)
【出願日】平成22年1月13日(2010.1.13)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成23年7月28日(2011.7.28)
【国際特許分類】
【出願日】平成22年1月13日(2010.1.13)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]