
測定装置
【課題】
構造が簡単で安価に製造でき、持ち運びが便利であると共に被測定物の任意の位置に接触子を接触させて任意の部分の寸法を容易に測定することができる測定装置を提供する。
【解決手段】
測定装置101は、被測定物Aの寸法を測定するもので、取付台103と、取付台103に回動可能に取り付けられた旋回枠体110とを備えている。旋回枠体110には、長手方向に摺動可能となるアーム部材170と、アーム部材170を長手方向に送る移送手段150が設けられている。アーム部材170の先部には、接触子201が取り付けられている。旋回枠体110には、アーム部材170の回動角度Pを検出する第1の検出手段121と、アーム部材170の長手方向の移動距離Nを検出する第2の検出手段136が設けられている。アーム部材170には、接触子201の移動距離Mを検出する第3の検出手段220が設けられている。
構造が簡単で安価に製造でき、持ち運びが便利であると共に被測定物の任意の位置に接触子を接触させて任意の部分の寸法を容易に測定することができる測定装置を提供する。
【解決手段】
測定装置101は、被測定物Aの寸法を測定するもので、取付台103と、取付台103に回動可能に取り付けられた旋回枠体110とを備えている。旋回枠体110には、長手方向に摺動可能となるアーム部材170と、アーム部材170を長手方向に送る移送手段150が設けられている。アーム部材170の先部には、接触子201が取り付けられている。旋回枠体110には、アーム部材170の回動角度Pを検出する第1の検出手段121と、アーム部材170の長手方向の移動距離Nを検出する第2の検出手段136が設けられている。アーム部材170には、接触子201の移動距離Mを検出する第3の検出手段220が設けられている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、被測定物を載置台に載せ、被測定物の外観形状の寸法を測定する測定装置に関する。
【背景技術】
【0002】
従来、被測定物の外観形状の寸法を測定する手段として、簡易なノギスと、高度な三次元測定装置がある。ノギスは、柔軟性に優れ、任意の箇所の細部を簡単に測定できる。一方、高度な測定装置は、被測定物を載置する載置面を備えた基台と、前記基台の載置面と略平行の面でX軸方向に移動可能な第1のガイド部材と、この第1のガイド部材上をY軸方向に移動可能な第2のガイド部材と、この第2のガイド部材上をZ軸方向に移動可能な接触子とを有する。さらに従来の測定装置は、前記第1のガイド部材の駆動手段と、前記第1のガイド部材のX軸方向の移動距離を検出する第1の検出手段と、前記第2のガイド部材の駆動手段と、前記第2のガイド部材のY軸方向の移動距離を検出する第2の検出手段と、前記接触子のZ軸方向の移動距離を検出する第3の検出手段とを有する(例えば、特許文献1)。
【0003】
上記従来の測定装置は、前記第1の検出手段によって検出された前記第1のガイド部材のX軸方向の移動距離と、前記第2の検出手段によって検出された前記第2のガイド部材のY軸方向の移動距離と、前記第3の検出手段によって検出された前記接触子のZ軸方向の移動距離を演算して、接触子の移動位置を算出するようになっている。この従来の測定装置は、基台の載置面に被測定物を載置し、被測定物に接触子を接触させ、接触子を被測定物の外形輪郭に接触させながら移動させると、前記したように、接触子のX軸方向の移動距離を第1の検出手段が検出し、接触子のY軸方向の移動距離を第2の検出手段が検出し、接触子のZ軸方向の移動距離を第3の検出手段が検出して、被測定物の三次元方向の寸法を測定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開平2−12613号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
簡易な測定手段としてのノギスは、フレキシブルな測定ができるが、測定した値を読むことが難しく誰でもが簡単に使いこなせるものではないという問題点があった。さらに、ノギスは縦横高さ等の寸法を測定することはできるがその位置の傾斜角度を測定することはできないという問題点があった。また、高度な測定手段である上記従来の測定装置は、接触子を移動させるのに、X軸方向に移動可能な第1のガイド部材と、Y軸方向に移動可能な第2のガイド部材を必要とするので、構造が複雑で安価に製造することができず、重量が嵩むため持ち運びが不便であるという問題点があった。さらに、第1のガイド部材のX軸方向の移動と、第2のガイド部材のY軸方向の移動は、駆動モータによって行われるため、測定位置の決まっている大量生産物の測定には適しているが、被測定物の任意の位置に接触子を接触させて測定することができないので、多品種少量の生産物(加工物)の測定には適していないという問題点があった。このように、従来の高度な測定装置は、被測定物の任意の部分の寸法を測定することができない等、被測定物の形状に合わせた柔軟な測定ができないという問題点があった。
【0006】
本願発明は、上記問題点に鑑み案出したものであって、構造が簡単で安価に製造でき、持ち運びが便利であると共に被測定物の任意の位置に接触子を極めて簡単に接触させて任意の部分の寸法を容易に測定することができる測定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本願請求項1に係る測定装置は、上記目的を達成するため、被測定物の寸法を測定する測定装置であって、被測定物を載置する載置面を備えた基台上に取り付けられる装置本体を有し、装置本体は、基台上に固定して取り付けられる取付台と、前記取付台に前記基台の載置面と略平行の面方向に回動可能に取り付けられた旋回枠体とを備え、前記旋回枠体には、前記基台の載置面と略平行の面方向で且つ長手方向に摺動可能となるアーム部材と、前記アーム部材を長手方向に送る移送手段とが設けられ、前記アーム部材の先部には、前記基台の載置面と略直角の方向に移動可能となるようにして接触子が取り付けられており、前記取付台又は前記旋回枠体には、前記アーム部材の回動角度を検出する第1の検出手段が設けられ、前記旋回枠体には、前記アーム部材の長手方向の移動距離を検出する第2の検出手段が設けられ、前記アーム部材には、前記接触子の移動距離を検出する第3の検出手段が設けられていることを特徴とする。
【0008】
本願請求項2に係る測定装置は、上記目的を達成するため、前記アーム部材は、一対の軸部材を有し、前記移送手段は、一対の軸部材の一方に形成されたラックと噛み合う歯車と、歯車を強制的に回転させる回転ハンドルとからなることを特徴とする。
【0009】
本願請求項3に係る測定装置は、上記目的を達成するため、前記接触子は、スライド部材に取り付けられており、前記スライド部材は、アーム部材に上下方向にスライド可能に取り付けられ、かつ所定位置で固定手段によりアーム部材に固定することができるように構成されていることを特徴とする。
【0010】
本願請求項4に係る測定装置は、上記目的を達成するため、被測定物の任意の箇所を原点として、当該原点から接触子の接触点の位置を算出する演算手段を有し、演算手段は、前記第1の検出手段によって検出されたアーム部材の回動角度と、前記第2の検出手段によって検出されたアーム部材の長手方向の移動距離を演算して接触子の接触点の縦方向と横方向の位置を算出すると共に、前記第3の検出手段によって検出された接触子の移動距離を演算して接触子の接触点の高さ方向の位置を算出することを特徴とする。
【0011】
本願請求項5に係る測定装置は、上記目的を達成するため、前記演算手段は、前記算出結果に基づいて、さらに原点から接触子の接触点までの距離と載置面に対する角度を算出することを特徴とする。
【0012】
本願請求項6に係る測定装置は、上記目的を達成するため、前記演算手段及び演算手段のオン及びオフを行う操作ボタンが前記取付台又は前記旋回枠体に設けられていることを特徴とする。
【0013】
本願請求項7に係る測定装置は、上記目的を達成するため、前記アーム部材には、アーム部材、旋回枠体及び取付台をカバーするカバー部材が設けられ、当該カバー部材は、アーム部材と共に移動可能であり、アーム部材の旋回枠体及び取付台に対する所定位置において、前記操作ボタンを操作することができる開口が形成されていることを特徴とする。
【0014】
本願請求項8に係る測定装置は、上記目的を達成するため、前記演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置を表示する表示手段が設けられていることを特徴とする。
【0015】
本願請求項9に係る測定装置は、上記目的を達成するため、前記演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置及び原点から接触点までの距離並びに載置面に対する角度を表示する表示手段が設けられていることを特徴とする。
【0016】
本願請求項10に係る測定装置は、上記目的を達成するため、前記演算手段によって算出された算出結果を記憶する記憶手段が設けられていることを特徴とする。
【発明の効果】
【0017】
本願発明に係る測定装置は、被測定物を基台の載置面に載置し、接触子を被測定物の任意の位置に接触させ、次に接触子を被測定物の他の任意の位置に接触させることにより、被測定物の二つの任意の位置の間の寸法を測定することができる。即ち、接触子の移動に伴って、接触子の移動距離が第3の検出手段によって検出され、被測定物の高さ方向の距離が検出される。また、接触子の移動に伴って、アーム部材が回動しながら長手方向に移動し、第1の検出手段によってアーム部材の回動角度が検出され、第2の検出手段によってアーム部材の長手方向の移動距離が検出される。このように、本願発明に係る測定装置は、接触子を把持し、被測定物の任意の位置に簡単且つ迅速に接触させることができ、しかも被測定物の二つの任意の位置の間の寸法を簡単に測定することができるので、操作が極めて容易であるという効果がある。また、本願発明に係る測定装置は、アーム部材だけで接触子を移動させることができるので、部品点数が少なく、構造が簡単で安価であり、さらに軽量化を図ることができ、持ち運びが便利であるという効果がある。また、本願発明に係る測定装置は、アーム部材を移送手段によって長手方向に送ることができるので、接触子を正確且つ確実に作業者の所望する位置に移動させることができるという効果がある。
【0018】
本願発明に係る測定装置は、前記移送手段が一対の軸部材の一方に形成されたラックと噛み合う歯車と、歯車を強制的に回転させる回転ハンドルとからなるので、簡単に操作することができ、しかも安価に製造することができるという効果がある。
【0019】
本願発明に係る測定装置は、接触子がアーム部材に上下方向にスライド可能に取り付けられたスライド部材に取り付けられているので、被測定物に合わせて接触子の高さを調節することができるという効果がある。
【0020】
本願発明に係る測定装置は、アーム部材の回動角度を第1の検出手段が検出し、アーム部材の長手方向の移動距離を第2の検出手段が検出し、演算手段が第1の検出手段によって検出したデータと第2の検出手段が検出したデータに基づいて接触子の接触点の横方向(X方向)と縦方向(Y方向)の位置を算出せしめ、さらに演算手段が第3の検出手段によって検出したデータに基づいて接触子の接触点の高さ方向(Z方向)の位置を算出せしめて、接触子の接触点の位置を容易に導き出すことができる。このようにして、本願発明に係る測定装置は、被測定物の任意の2箇所の位置の一方を原点とし、他方に接触子を接触させると、この他方の位置が演算手段によって算出され、原点に対する他方の箇所の横方向(X方向)と縦方向(Y方向)と高さ方向(Z方向)の位置を容易に導き出すことができるという効果がある。
【0021】
本願発明に係る測定装置は、演算手段によって算出された算出結果、即ち、原点に対する他方の箇所の横方向(X方向)と縦方向(Y方向)と高さ方向(Z方向)の位置に基づいて、原点から接触子の接触点までの距離と載置面に対する角度を算出することができ、この被測定物の任意の2箇所の間の寸法及び傾斜角を簡単に測定することができるという効果がある。
【0022】
本願発明に係る測定装置は、前記演算手段及び演算手段のオン及びオフを行う操作ボタンが前記取付台又は前記旋回枠体に設けられているので、操作が容易であるという効果がある。
【0023】
本願発明に係る測定装置は、アーム部材、旋回枠体及び取付台をカバーするカバー部材が設けられ、当該カバー部材は、アーム部材の所定位置において、前記操作ボタンを操作することができる開口が形成されているので、アーム部材の所定位置以外では操作することができず、操作ミスを減らすことができるという効果がある。
【0024】
本願発明に係る測定装置は、演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置及び原点から接触点までの距離並びに載置面に対する角度を表示する表示手段が設けられているので、被測定物の寸法を一目で把握することが出来るという効果がある。
【0025】
本願発明に係る測定装置は、演算手段によって算出された算出結果を記憶する記憶手段が設けられているので、算出結果のデータを管理することができ、プリンター、プロッター等の印刷装置に接続して、被測定物を図面化することができるという効果がある。
【図面の簡単な説明】
【0026】
【図1】本願発明に係る測定装置の一つの実施の形態を示す全体斜視図である。
【図2】図1の測定装置の側面断面図である。
【図3】図1の測定装置の要部正面断面図である。
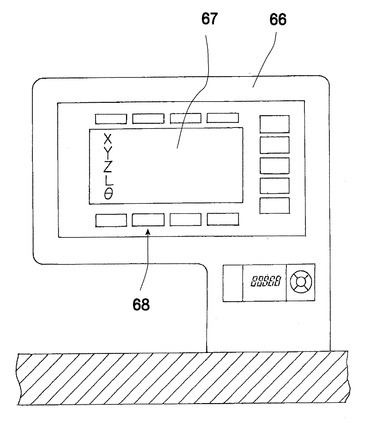
【図4】図1の測定装置の表示手段の正面図である。
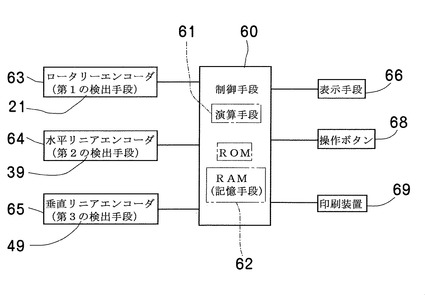
【図5】図1の測定装置の制御系のブロック図である。
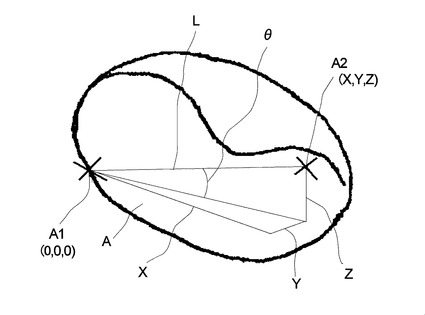
【図6】被測定物の測定方法を説明する斜視図である。
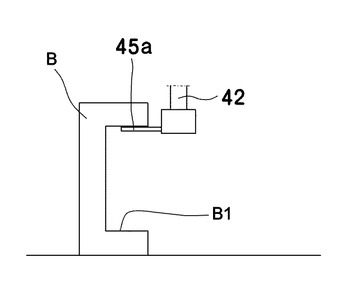
【図7】他の測定装置の要部説明図である。
【図8】測定装置の利用形態を示す要部側面図である。
【図9】本願発明に係る測定装置の他の実施の形態を示す全体側面図である。
【図10】図9の測定装置の矢視B正面図である。
【図11】図9の測定装置の側面断面説明図である。
【図12】図9の測定装置の移送手段の説明平面図である。
【図13】図9の測定装置の移送手段の正面断面図である。
【図14】図9の測定装置のアーム部材の説明図である。
【図15】図9の接触子の取付構成を説明する説明図である。
【図16】図9の測定装置のカバー部材の側面図である。
【図17】図9の接触子の動きを説明する側面図である。
【図18】図9の測定装置の初期位置を示す側面図である。
【図19】図9の測定装置の初期位置を示すカバー部材を装着した側面図である。
【図20】図9の測定装置の最終位置を示す側面図である。
【図21】図9の測定装置の最終位置を示すカバー部材を装着した側面図である。
【図22】図9の測定装置の制御系のブロック図である。
【発明を実施するための最良の形態】
【0027】
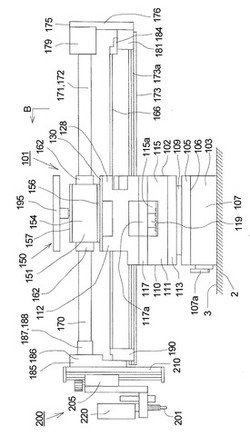
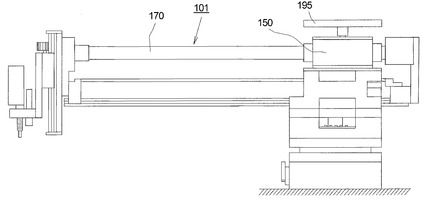
本願発明に係る測定装置の概要を図1乃至図21に基づいて説明する。図9に示すように、測定装置101は、被測定物Aの寸法を測定するものであって、被測定物Aを載置する載置面3を備えた基台2上に取り付けられる装置本体102を有する。装置本体102は、基台2上に固定して取り付けられる取付台103と、前記取付台103に前記基台2の載置面3と略平行の面方向に回動可能に取り付けられた旋回枠体110とを備えている。前記旋回枠体110には、前記基台2の載置面3と略平行の面方向で且つ長手方向に摺動可能となるアーム部材170と、前記アーム部材170を長手方向に送る移送手段150とが設けられている。
【0028】
前記アーム部材170の先部には、前記基台2の載置面3と略直角の方向に移動可能となるようにして接触子201が取り付けられており、前記取付台103又は前記旋回枠体110には、前記アーム部材170の回動角度Pを検出する第1の検出手段121が設けられている。前記旋回枠体110には、前記アーム部材170の長手方向の移動距離Nを検出する第2の検出手段136が設けられている。前記アーム部材170には、前記接触子201の移動距離Mを検出する第3の検出手段220が設けられている。
【0029】
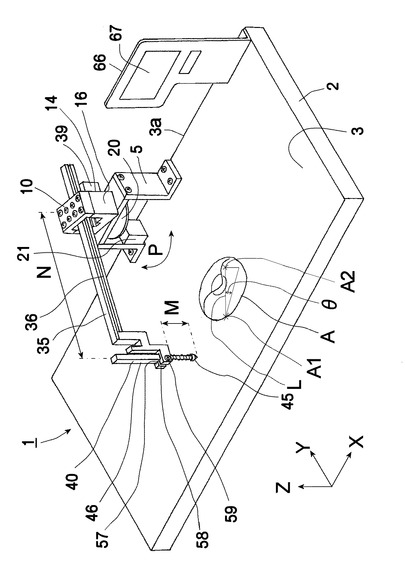
測定装置101は、図1に示すように、被測定物Aを基台2の載置面3に載置し、接触子201を被測定物Aの任意の位置A1に接触させ、次に接触子201を被測定物Aの他の任意の位置A2に接触させることにより、被測定物Aの二つの任意の位置A1,A2の間の寸法を測定することができる。即ち、接触子201の移動に伴って、接触子201の移動距離Mが第3の検出手段220によって検出され、被測定物Aの高さ方向の距離が検出される。また、接触子201の移動に伴って、アーム部材170が回動しながら長手方向に移動し、第1の検出手段121によってアーム部材170の回動角度Pが検出され、第2の検出手段136によってアーム部材170の長手方向の移動距離Nが検出される。
【0030】
このように、測定装置101は、接触子201を把持し、被測定物Aの任意の位置A1,A2に簡単且つ迅速に接触させることができ、しかも被測定物Aの二つの任意の位置A1,A2の間の寸法を簡単に測定することができるので、操作が極めて容易である。また、測定装置101は、アーム部材170だけで接触子201を移動させることができるので、部品点数が少なく、構造が簡単で安価であり、さらに軽量化を図ることができ、持ち運びが便利である。また、測定装置101は、アーム部材170を移送手段150によって長手方向に送ることができるので、接触子201を正確且つ確実に作業者の所望する位置に移動させることができる。
【0031】
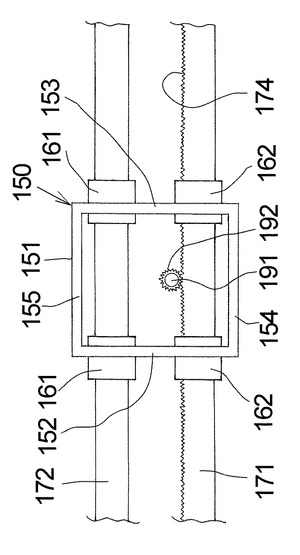
測定装置101のアーム部材170は、図12,13に示すように、一対の軸部材171,172を有する。前記移送手段150は、一対の軸部材171,172の一方171に形成されたラック174と噛み合う歯車192と、歯車192を強制的に回転させる回転ハンドル195とからなるので、簡単に操作することができ、しかも安価に製造することができる。
【0032】
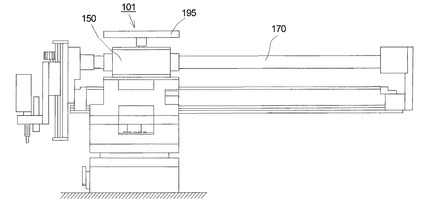
測定装置101の前記接触子201は、図15に示すように、スライド部材205に取り付けられている。前記スライド部材205は、アーム部材170に上下方向にスライド可能に取り付けられ、かつ所定位置で固定手段225によりアーム部材170に固定することができるように構成されているので、被測定物Aに合わせて接触子201の高さを調節することができる。
【0033】
測定装置101は、被測定物Aの任意の箇所A1を原点として、当該原点A1から接触子201の接触点の位置A2を算出する演算手段251を有する。演算手段251は、前記第1の検出手段121によって検出されたアーム部材170の回動角度Pと、前記第2の検出手段136によって検出されたアーム部材170の長手方向の移動距離Nを演算して接触子201の接触点A2の縦方向と横方向の位置Y,Xを算出すると共に、前記第3の検出手段220によって検出された接触子201の移動距離Mを演算して接触子201の接触点A2の高さ方向の位置Zを算出する。
【0034】
測定装置101は、アーム部材170の回動角度Pを第1の検出手段121が検出し、アーム部材170の長手方向の移動距離Nを第2の検出手段136が検出し、演算手段251が第1の検出手段121によって検出したデータと第2の検出手段136が検出したデータに基づいて接触子201の接触点の横方向(X方向)と縦方向(Y方向)の位置X、Yを算出せしめ、さらに演算手段251が第3の検出手段220によって検出したデータに基づいて接触子201の接触点の高さ方向(Z方向)の位置Zを算出せしめて、接触子201の接触点の位置X、Y、Zを容易に導き出すことができる。このようにして、測定装置101は、被測定物Aの任意の2箇所の位置の一方A1を原点とし、他方A2に接触子201を接触させると、この他方の位置A2が演算手段251によって算出され、原点A1に対する他方の箇所A2の横方向(X方向)と縦方向(Y方向)と高さ方向(Z方向)の位置X、Y、Zを容易に導き出すことができる。
【0035】
測定装置101は、演算手段251によって算出された算出結果、即ち、原点に対する他方の箇所の横方向(X方向)と縦方向(Y方向)と高さ方向(Z方向)の位置X、Y、Zに基づいて、原点A1から接触子201の接触点A2までの距離Lと載置面3に対する角度θを算出することができ、この被測定物Aの任意の2箇所A1,A2の間の寸法L及び傾斜角θを簡単に測定することができる。
【0036】
測定装置101は、前記演算手段251及び演算手段251のオン及びオフを行う操作ボタン125が前記取付台103又は前記旋回枠体110に設けられているので、操作が容易である。又、測定装置101は、アーム部材170に、アーム部材170、旋回枠体110及び取付台103をカバーするカバー部材230が設けられている。当該カバー部材230は、アーム部材170と共に移動可能であり、アーム部材170の旋回枠体110及び取付台103に対する所定位置において、前記操作ボタン125を操作することができる開口231が形成されているので、アーム部材170の所定位置以外では操作することができず、操作ミスを減らすことができる。
【0037】
測定装置101は、演算手段251によって算出された接触子201の接触点の縦方向、横方向、高さ方向の位置X、Y、Z及び原点A1から接触点A2までの距離L並びに載置面3に対する角度θを表示する表示手段66が設けられているので、被測定物Aの寸法を一目で把握することが出来る。
【0038】
測定装置101は、演算手段251によって算出された算出結果を記憶する記憶手段252が設けられているので、算出結果のデータを管理することができ、プリンター、プロッター等の印刷装置69に接続して、被測定物Aを図面化することができる。
【0039】
最初に測定装置1について詳細に説明する。図1に示すように、測定装置1は、被測定物Aを載置する載置面3を備えた基台2を有する。基台2は、載置面3が略水平面となるようにして設置される。載置面3の端縁(上端縁)3a近傍には、取付枠5が設けられている。図3に示すように、取付枠5は、上板6と、上板6の両端にネジ等によって固定された脚板7,7と、脚板7,7の下端に形成された固定板8,8とからなる。取付枠5は、固定板8,8をネジ等によって基台2の載置面3に固定して取り付けられている。上板6は、載置面3と略平行となっている。
【0040】
取付枠5の上板6には、回動体10が回動可能に取り付けられている。回動体10は、略直方体状に形成され、上面11と、下面12と、前面13と、後面14と、左面15と、右面16を有している。上面11には、前面13から後面14まで伸びる凹部17が形成されている。回動体10は、下面12に回転軸19が形成されている。回動体10は、下面12が載置面3に摺接し、上板6に形成された軸穴から回転軸19が下方に突出している。回転軸19の下端には、円板20が取り付けられている。円板20の一方の面(下面)20aには、第1のフォトセンサ(第1の検出手段)21によって円板20の回転量Pが検出される微細な凹凸が、円板20の中心から放射状に所定間隔あけて連続形成されている。この第1のフォトセンサ21は、取付枠5の一方の脚板7にネジ等により取り付けられている。この第1のフォトセンサ21と円板20とでロータリーエンコーダ63を構成する。
【0041】
回動体10の上面11であって、前記凹部17を挟んだ両側には、ブロック片22,22が固定して取り付けられている。この両ブロック片22,22には、支持板25がネジ等によって固定して設けられている。支持板25の下面26には、ガイド部材30がネジ等により固定して取り付けられている。ガイド部材30には、前記回転軸19を中心として、回動体10の前面13(後面14)と直角方向に伸びるガイド凹部31が形成されている。ガイド凹部31の両側には、対向してガイド突起32,32が形成されている。
【0042】
前記ガイド部材30のガイド凹部31には、断面が略矩形状のアーム部材35が摺動可能に取り付けられている。即ち、アーム部材35は、短手方向の両側面に前記ガイド突起32,32に案内されるガイド溝36,36が形成されている。図1,3に示すように、アーム部材35は、前記ガイド溝36,36が前記ガイド突起32,32に案内され、基台2の載置面3と略平行で、且つ、回動体10の前後方向(アーム部材35の長手方向)に摺動可能となっている。このアーム部材35の短手方向の中心線と、回転軸19の中心は常に一致するようになっている。アーム部材35の一方の面(下面)38には、第2のフォトセンサ(第2の検出手段)39によってアーム部材35の長手方向の移動(摺動)距離Nが検出される微細な凹凸が長手方向に向かって所定間隔あけて連続形成されている。この第2のフォトセンサ39は、回動体10の後面14にネジ等により取り付けられている。この第2のフォトセンサ39とアーム部材35の下面38で水平リニアエンコーダ64を構成する。なお、アーム部材35の回転量は、アーム部材35の回転が回動体10を介して円板20に伝達されるため、第1のフォトセンサ(第1の検出手段)21によって検出される。従って、アーム部材35の回転量は、円板20の回転量Pと同じである。
【0043】
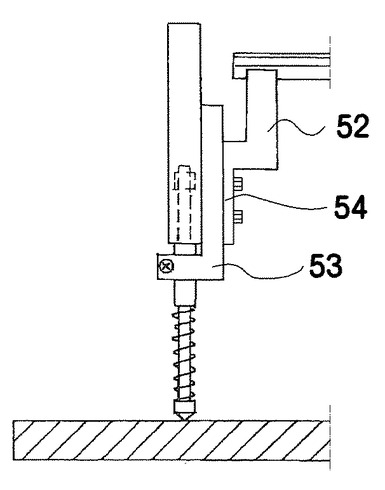
図2に示すように、アーム部材35の先端には、摺接部材40が設けられている。摺接部材40は、筒部材41と、筒部材41内に移動可能に設けられた測定軸42と、測定軸42を載置面3側に付勢するバネ部材(弾性部材)43を有する。前記筒部材41は、アーム部材35の先端に固定された装着部材51に取り付けられている。装着部材51は、略L字状の上部装着部52と、同じく略L字状の下部装着部53とからなる。下部装着部53は、縦保持部材55と、縦保持部材55の下端に一体的に設けられた横保持部材56とからなる。横保持部材56には、上下方向(載置面3と略直角の方向)に向かって形成された取付孔57と、取付孔57の内径を調節するための割溝58と、割溝58の隙間を調節するネジ59とが設けられている。なお、図7に示すように、上部装着部52と、下部装着部53を分離し、上部装着部52の下端に取付板54を形成し、当該取付板54に下部装着部53をネジ等により着脱可能に取り付ける構成にしても良い。
【0044】
前記筒部材41は、前記取付孔57内に挿通してネジ59を締めると、割溝58の隙間が狭められて取付孔57の内径が小さくなり、そのため取付孔57の内面が圧接するので、取付孔57に固定して取り付けられる。筒部材41内を摺動する測定軸42は、中心線が前記アーム部材35の中心線と略同じ位置となり、上下方向(載置面3と略直角の方向)に移動可能となる。測定軸42は、筒部材41の両端(上下端)から突出し、一端(下端)に接触子45が設けられている。前記バネ部材(弾性部材)43は、接触子45と筒部材41の間の測定軸42に巻装され、接触子45を下方向(載置面3側)に向かって付勢し、接触子45を載置面3に接触させる。
【0045】
図2に示すように、測定軸42の他端44は、センサケース46内に収納されている。センサケース46内には、測定軸42の軸方向(上下方向)の移動距離Mを検出する第3のフォトセンサ(第3の検出手段)49が設けられている。センサケース46は、前記筒部材41の他端(上端)に形成されたフランジ47と、下部装着部53の縦保持部材55に固定して取り付けられている。この第3のフォトセンサ49と測定軸42の他端44で垂直リニアエンコーダ65を構成する。
【0046】
基台2には、前記第1のフォトセンサ21と、第2のフォトセンサ39と、第3のフォトセンサ49とに接続される制御手段60と、制御手段60に接続される表示手段66とを有する。表示手段66は表示部67を有し、表示部67に接触子45のX軸方向の移動位置(横方向の位置)Xと、接触子45のY軸方向の移動位置(縦方向の位置)Yと、接触子45のZ軸方向の移動位置(高さ方向の位置)Zと、接触子45の移動距離Lと、接触子45の傾斜角度θが表示される。
【0047】
制御手段60は、演算手段61とRAM(記憶手段)62とを有し、演算手段61によって第1のフォトセンサ21からの信号によりアーム部材35の回動角度Pを算出する。同様に、演算手段61によって第2のフォトセンサ39からの信号によりアーム部材35の移動距離Nを算出する。演算手段61によってアーム部材35の回動角度Pと移動距離Nから、接触子45のX軸方向の移動位置XとY軸方向の移動位置Yを算出し、表示手段66の表示部67に接触子45の移動位置X,Yを表示する。演算手段61によって第3のフォトセンサ49からの信号により接触子45のZ軸方向の移動位置Zを算出し、表示手段66の表示部67に接触子45の移動位置Zを表示する。制御手段60は、前記移動位置X、Y、Z、移動距離N、回動角度PのデータをRAM(記憶手段)62に記憶させることが出来る。なお、表示手段66には、測定装置1を操作する操作ボタン68を有する。この操作ボタン68には、RAM(記憶手段)62に記憶させたデータを消去(リセット)して、表示部67の表示を全て0にするリセットボタン、移動位置の数値を再入力する入力ボタン等が含まれている。
【0048】
測定装置1は、基台2の載置面3に被測定物Aを載置する。被測定物Aの一点(基準点)に接触子45を接触させ、リセットボタンを押して表示手段66の表示部67の数値を0にする。この数値が0となった点が原点となる。接触子45を被測定物Aの任意の位置に接触させる。原点から任意の位置までの接触子45の上下方向の移動距離Mは、第3のフォトセンサ49によって検出され、この検出されたデータに基づいて演算手段61によってZ方向(高さ方向)の位置Zが算出される。この算出されたZ方向の位置データは、表示手段66の表示部67に表示され、同時にRAM(記憶手段)62に記憶されていく。
【0049】
接触子45の原点から任意の位置までの移動に伴って、アーム部材35が回動しながら長手方向に移動する。アーム部材35の回動は、前述したように、第1のフォトセンサ21によって検出され、この検出されたデータに基づいて演算手段61によってアーム部材35の回動角度Pが算出される。この算出されたアーム部材35の回動角度Pは、RAM(記憶手段)62に記憶されていく。アーム部材35の長手方向の移動距離Nは、第2のフォトセンサ39によって検出され、この検出されたデータに基づいて演算手段61によって算出される。この算出されたアーム部材35の移動距離Nは、RAM(記憶手段)62に記憶されていく。
【0050】
また、演算手段61は、アーム部材35の移動距離Nと回動角度Pに基づいて接触子45のX方向(横方向)の位置XとY方向(縦方向)の位置Yを算出する。この算出したX方向とY方向の位置データは、表示手段66の表示部67に表示され、同時にRAM(記憶手段)62に記憶されていく。演算手段61は、接触子45の位置X、Y、Zに基づいて、原点から接触子45までの移動距離Lを算出する。制御手段60は、この算出した移動距離Lを表示手段66の表示部67に表示する。また、演算手段61は、接触子45の位置X、Y、Zに基づいて、原点と接触子45を結ぶ線と載置面3との傾斜角θを算出する。制御手段60は、この算出した傾斜角θを表示手段66の表示部67に表示する。前記した移動距離Lのデータと傾斜角θのデータは、RAM(記憶手段)62に記憶される。
【0051】
このように、測定装置1は、任意の位置を原点として、測定位置のX方向(横方向)の位置X、Y方向(縦方向)の位置Y、Z方向(高さ方向)の位置Z、任意の位置から測定位置まで距離L、任意の位置と測定位置を結ぶ線の載置面3に対する傾斜角θを瞬時に算出して、表示手段66の表示部67に表示する。従って、測定装置1は、ノギス等の測定工具よりも簡単に被測定物Aの寸法を測定することが可能である。例えば、図1に示すように、被測定物Aの任意の位置A1に接触子45を接触させ、リセットボタンを押して、表示手段66の表示部67を全て0にする。次に、被測定物Aの任意の位置A2に接触子45を接触させると、表示手段66の表示部67に、任意の位置A2のX方向の位置X、Y方向の位置Y、Z方向の位置Zと、任意の位置A1からA2まで距離L、任意の位置A1とA2を結ぶ線の傾斜角θを瞬時に算出して、表示手段66の表示部67に表示する。上記距離Lが被測定物Aの寸法となる。このようにして、被測定物Aの縦方向、横方向、高さ方向の寸法を迅速且つ簡易に測定することができ、その測定結果が瞬時に表示手段66に表示されるので、一目で寸法を確認することができる。また、測定結果は、RAM(記憶手段)62に記憶されるので、測定結果のデータを管理することができ、制御手段60にプリンタ、プロッタ等の印刷装置69を接続することによって、被測定物Aを図面化することができる。
【0052】
測定装置1は、モータ等の駆動手段を備えておらず、すべて手動で行うため、軽量化、小型化、低コスト化を図ることができる。測定者は、アーム部材35の先端に設けられた接触子45を把持して測定を行うが、接触子45と共にアーム部材35も移動してアーム部材35が測定者側に突出することがないので、アーム部材35が測定のじゃまにならない。また、測定装置1は、従来の測定装置のようにX軸方向又はY軸方向に直線的に移動させながら測定するだけではなく、任意の位置と任意の位置の間の距離と角度を迅速且つ簡易に測定することができ、被測定物Aの外観形状に合わせて柔軟な測定を行うことできる。
【0053】
また、接触子45を測定軸42に着脱交換できるようにしても良い。このようにすれば、上記実施の形態では、接触子45の先端が下方に向いているが、図7に示すように、先端が水平方向に向いた接触子45aを測定軸42に取り付けることが可能となる。この形状の接触子45aによれば、被測定物Bの側面凹部B1の内側面の寸法を測定することが可能となる。
【0054】
上記実施の形態では、被測定物Aの任意の位置A1を原点としたが、制御手段60によって原点を最初から設定しておいても構わない。このように設定すると、接触子45を任意の箇所A1に接触させると、演算手段61がその接触位置A1の位置(X1,Y1,Z1)を算出する。次に接触子45を任意の箇所A2に接触させると、演算手段61がその接触位置A2の位置(X2,Y2,Z2)を算出する。さらに演算手段61がA1の位置とA2の位置関係から、任意の位置A1とA2の距離L及び傾斜角θを演算する。このようにして被測定物Aの寸法を測定するようにしても構わない。
【0055】
さらに、上記実施の形態では、被測定物Aの寸法を測定するために摺接部材40をアーム部材5の先部に取り付けたが、摺接部材40を取り外してポンチ等の工具を取り付けても良い。例えば、図8に示すように、上部装着部52と、下部装着部53を分離し、上部装着部52の下端に取付板54を形成し、当該取付板54に下部装着部53をネジ等により着脱可能に取り付ける構成にする。下部装着部53に工具を装着して上部装着部52に固定する。このようにすれば、工具の先端の位置は、表示手段66の表示部67にX、Y、Zで表示される。この表示された位置X、Y、Zを確認しながら、材料に工具で穴等の目印を正確に付けることができる。
【0056】
測定装置1は、従来の簡易な測定手段であるノギスと同様に、フレキシブルで迅速な測定を行うことができる一方、その測定結果が表示手段66に表示され一目でその測定結果を視認することができる。従って、測定装置1は、従来の高度な三次元測定装置と比べて、多品種少量の生産物の測定に有効に活用することができる。また、測定装置1は、部品点数が少なく構造が簡易化されているので、安価に製造することができ、従来の高度な三次元測定装置と比べて、設置の負担が少なくてすみ、中小企業にとっても利用しやすいものになっている。
【0057】
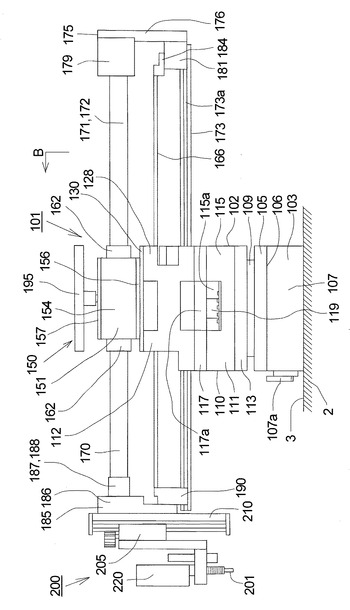
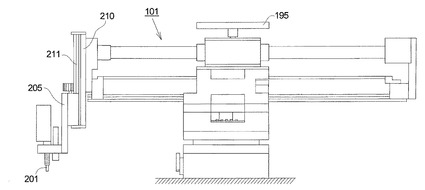
さらに、測定装置1の他の実施の形態となる測定装置101について詳細に説明する。図9乃至11に示すように、測定装置101は、被測定物Aを載置する載置面3を備えた基台2上に固定して取り付けられる。測定装置101は、基台2上に取り付けられる装置本体102を有する。装置本体102は、基台2上に固定して取り付けられる取付台103と、取付台103に基台2の載置面3と略平行の面方向(水平方向)に回動可能に取り付けられた旋回枠体110とを備えている。
【0058】
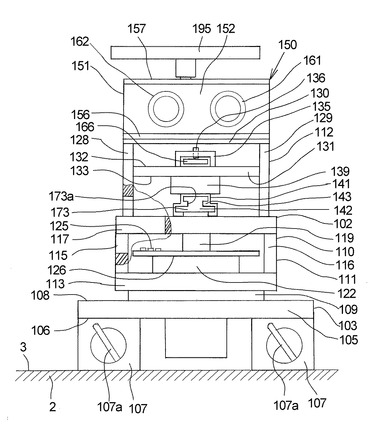
取付台103は、取付板105と、取付板105の下面106左右両側に配置固定された電磁石107,107と、取付板105の上面108に設けられた円板状の回転台109とからなる。電磁石107は、オン・オフを行うスイッチ107aを備えている。この回転台109には、前記旋回枠体110が回動可能に取り付けられている。旋回枠体110は、下枠体111と、下枠体111の上部に固定された上枠体112とからなる。
【0059】
下枠体111は、矩形状の下壁113と、下壁113の左右両側に設けられた下左側壁115及び下右側壁116と、下左側壁115及び下右側壁116の上端に設けられた中間壁117とからなる。前記取付板105には、回転台109、下壁113及び中間壁117を貫通して下枠体111の回転中心を構成する支軸119が固定されている。
【0060】
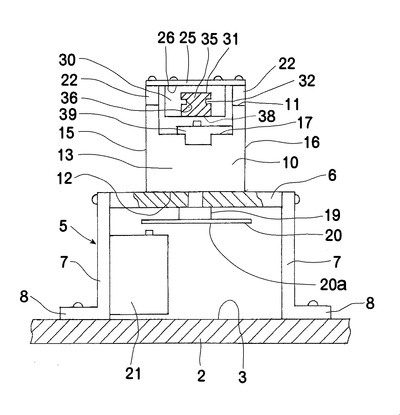
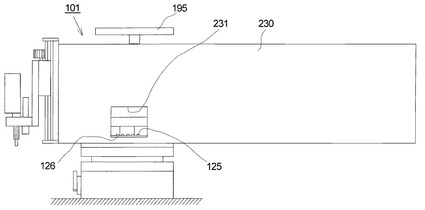
前記下壁113には、下枠体111の回転量(回転角度)Pを検出する第1の検出手段121が設けられている。第1の検出手段121は、下壁113に固定されたケース122に取り付けられた第1のフォトセンサ等であって、ケース122内の支軸119に固定された図示しない円板に放射状に連続形成された微細な凹凸を読み取って下枠体111の回転量Pを検出する。この第1のフォトセンサ121と円板とでロータリーエンコーダ241を構成する。ケース122上には、オン・オフスイッチ等の操作ボタン125を有する電子基板126が設けられている。
【0061】
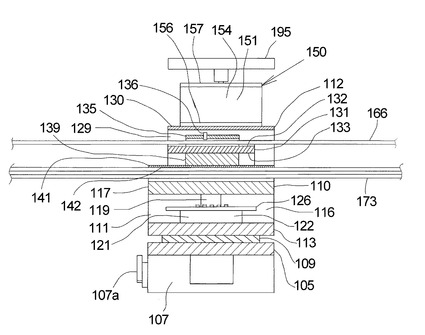
上枠体112は、中間壁117の左右両側に設けられた上左側壁128及び上右側壁129と、上左側壁128及び上右側壁129の上端に設けられた上壁130とからなる。上枠体112の略中央には、仕切壁131が設けられ、仕切壁131の上面132に第2の検出手段136が設けられ、仕切壁131の下面133にガイド部材141が設けられている。第2の検出手段136は、仕切壁131の上面132に固定された略コ字状の枠部材135に取り付けられた第2のフォトセンサ等である。
【0062】
ガイド部材141は、仕切壁131の下面133にブロック139を介して固定して取り付けられている。ガイド部材141には、前記支軸119を中心として、前後方向に伸びるガイド凹部142が形成されている。ガイド凹部142の両側には、対向してガイド突起143,143が形成されている。
【0063】
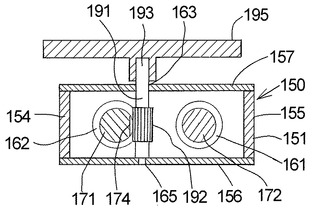
旋回枠体110の上部、即ち上枠体112の上壁130には、図9に示すように、アーム部材170を長手方向に送る移送手段150が設けられている。移送手段150は、図12,13に示すように、枠部材151と、枠部材151の下部に設けられた底壁156と、枠部材151の上部に設けられた天壁157を有する。枠部材151は、前壁152と、後壁153と、左壁154と、右壁155とで略ロ字状に形成されている。
【0064】
前壁152及び後壁153には、アーム部材170を構成する一対の軸部材171,172を軸方向に案内するガイド筒161,162が設けられている。即ち右方の軸部材172は、前壁152及び後壁153の右側に配置されたガイド筒161,161によって軸方向に摺動可能に保持され、左方の軸部材171は、前壁152及び後壁153の左側に配置されたガイド筒162,162によって軸方向に摺動可能に保持されている。天壁157には駆動軸191の上部を挿通する挿通孔163が形成されている。底壁156には、駆動軸191の下部を軸受けする軸受孔165が形成されている。
【0065】
アーム部材170は、略水平方向と平行に並設された一対の軸部材171,172と、前記一対の軸部材171,172の略中心下方に設けられたガイド軸173と、軸部材171,172及びガイド軸173の後部を連結する後部連結部材175と、軸部材171,172及びガイド軸173の前部を連結する前部連結部材185とからなる。また、後部連結部材175と前部連結部材185の間であって、ガイド軸173の上方には、被検出板166が設けられている。軸部材171,172は、円軸状に形成され、一方の軸部材171の側面には、軸方向(長手方向)に向かってラック174が形成されている。また、ガイド軸173は、左右両側面に前記ガイド凹部142のガイド突起143,143に案内されるガイド溝173a,173aが形成されている。
【0066】
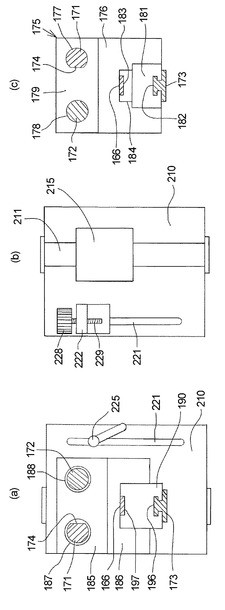
後部連結部材175は、図9,図14(c)に示すように、連結板176を有する。連結板176の上部には、前記一対の軸部材171,172の後部を差し込んで固定する差込穴177,178を有する上部ブロック片179が設けられている。また、連結板176の下部には、前記ガイド軸173の後部を差し込んで固定する差込溝182が形成された下部ブロック片181が設けられている。さらに下部ブロック片181の上部には、前記被検出板166の後部を差し込んで固定する差込凹部183が形成された中間ブロック片184が設けられている。
【0067】
前部連結部材185は、図9,図14(a)に示すように、連結板186を有する。連結板186の上部には、前記一対の軸部材171,172の前部を差し込んで固定する差込管187,188が設けられている。また、連結板186の下部には、前記ガイド軸173の前部を差し込んで固定する差込溝196と、前記被検出板166の前部を差し込んで固定する差込凹部197が形成されたブロック片190が設けられている。なお、前部連結部材185の前部、即ち連結板186の前面には、取付板210が固定して取り付けられている。
【0068】
図12,13を参照して前述したように、左側に位置する前記軸部材171は、前壁152及び後壁153の左側に配置されたガイド筒162,162によって軸方向に摺動可能に保持され、右側に位置する軸部材172は、前壁152及び後壁153の右側に配置されたガイド筒161,161によって軸方向に摺動可能に保持されている。また、図10に示すように、ガイド軸173は、前記ガイド部材141のガイド凹部142に差し込まれ、ガイド軸173のガイド溝173a,173aがガイド凹部142のガイド突起143,143に案内され、ガイド部材141によって軸方向に摺動可能に保持されている。
【0069】
また、被検出板166は、仕切壁131の上面132に固定された前記枠部材135内に挿通されている。被検出板166の上面には、前記第2のフォトセンサ(第2の検出手段)136によって被検出板166の長手方向の移動(摺動)距離Nが検出される微細な凹凸が長手方向に向かって所定間隔あけて連続形成されている。この第2のフォトセンサ(第2の検出手段)136と被検出板166で水平リニアエンコーダ242を構成する。
【0070】
図13に示すように、前記移送手段150の天壁157の挿通孔163と底壁156の軸受孔165に駆動軸191が回動可能に設けられている。駆動軸191には、前記左側に位置する軸部材171のラック174と噛み合う歯車192が形成されている。また、駆動軸191は、天壁157から上方に突出しており、この突出部193に円盤状のハンドル195が固定されている。
【0071】
図9に示すように、アーム部材170の先端には、摺接部材200が設けられている。摺接部材200は、弾性部材によって載置面3側に付勢された接触子201を有する。摺接部材200内には、接触子201の軸方向(上下方向)の移動距離Mを検出する第3のフォトセンサ等の第3の検出手段220が設けられている。この第3のフォトセンサ220と接触子201とで垂直リニアエンコーダ243を構成する。
【0072】
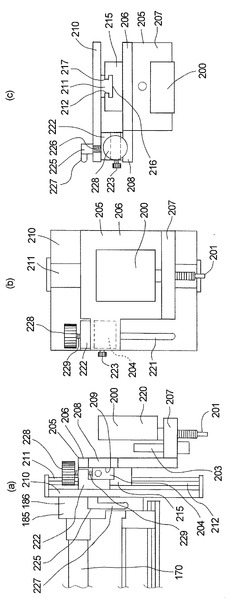
この摺接部材200は、装着部材205に取り付けられている。図15に示すように、装着部材205は、略L字状に形成され、縦保持部材206と、縦保持部材206の前面側下端に一体的に設けられた横保持部材207とからなる。横保持部材207には、上下方向(載置面3と略直角の方向)に向かって形成された取付孔が形成され、当該取付孔に摺接部材200が固定して取り付けられる。また、横保持部材207には、接触子201を照らす発光装置203が設けられている。
【0073】
前記取付板210の前面右側には、上下方向に向かって伸びるガイドレール211が設けられている。ガイドレール211は、矩形軸状に形成され、両側にガイド溝212が形成されている。前記縦保持部材206の背面側には、前記取付板210のガイドレール211にそって上下方向に案内される摺動体215が設けられている。摺動体215には、前記ガイドレール211を挿通するガイド凹部216と、ガイドレール211のガイド溝212に摺動可能に係合するガイド突起217が形成されている。従って装着部材205は、ガイドレール211に沿って上下方向に移動可能な構成となっている。
【0074】
前記取付板210の左側には、上下方向に向かって伸びるスライド溝221が形成され、スライド溝221に沿って上下方向にスライド可能な略L字状のストッパー片222が設けられている。ストッパー片222は、位置調節部材225によって取付板210の所定位置に固定される。位置調節部材225は、スライド溝221を挿通するネジ部229と、調節ハンドル部227とを有し、当該ネジ部229をストッパー片222にねじ込むことにより、ストッパー片222を取付板210に固定し、当該ネジ部229をストッパー片222から緩めることにより、ストッパー片222を取付板210に対して摺動可能となる。
【0075】
前記装着部材205の縦保持部材206には、右方に向かって突出する突片208を有し、突片208の裏面209に微調節用ブロック204が固定して設けられている。ストッパー片222には、微調節用ネジ部材228が回動可能に設けられており、微調節用ネジ部材228のネジ部229が微調節用ブロック204に螺合している。微調節用ネジ部材228を一方に回すと、微調節用ブロック204、即ち、装着部材205が上昇し、微調節用ネジ部材228を他方に回すと、微調節用ブロック204、即ち、装着部材205が下降して、接触子201の高さ方向の微調節を行うことができる。なお、微調節用ブロック204には、微調節用ネジ部材228のネジ部229をロックするロックボルト223が設けられており、ロックボルト223を一方に回動するとネジ部229に圧接して微調節用ネジ部材228をロックし、ロックボルト223を他方に回動するとネジ部229から外れて微調節用ネジ部材228のロックを解除する。
【0076】
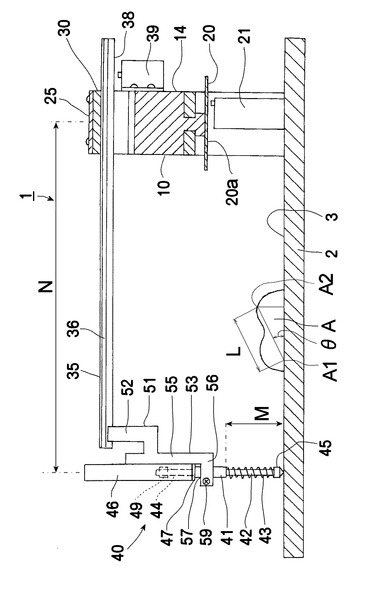
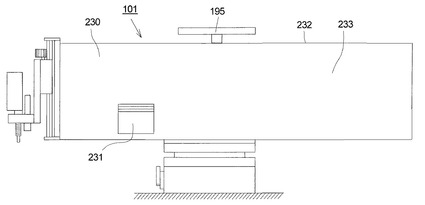
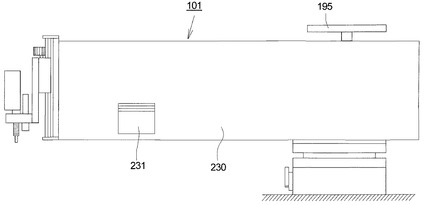
図16に示すように、アーム部材170には、カバー部材230が取り付けられている。カバー部材230は、断面コ字状に形成され、上板232と、上板232の両端に略直角に折曲された側板233とからなる。左側の側板233の前方には、開口231が形成されている。上板232の略中央には、長孔が形成されている。カバー部材230は、上板232を前部連結部材185及び後部連結部材175に図示しないネジ等で固定され、移送手段150及び旋回枠体110がカバーされる。移送手段150の駆動軸191は、上板232の長孔から上方に突出する。図19に示すように、開口231は、アーム部材170を後方に一番戻した初期位置でのみ、旋回枠体110に設けた電子基板126と対向して操作ボタン125を操作できる位置に形成されている。従って、アーム部材170が初期位置以外に移動している場合には、開口231が操作ボタン125から外れているため、操作ボタン125を操作することができない。
【0077】
前記旋回枠体110に設けられた電子基板126には、前記第1のフォトセンサ121、前記第2のフォトセンサ136、前記第3のフォトセンサ220、前記発光装置203が接続されている。基台2には、電子基板126に接続される表示手段66とを有する。表示手段66は表示部67を有し、表示部67に接触子201のX軸方向の移動位置(横方向の位置)Xと、接触子201のY軸方向の移動位置(縦方向の位置)Yと、接触子201のZ軸方向の移動位置(高さ方向の位置)Zと、接触子201の移動距離Lと、接触子201の傾斜角度θが表示される。
【0078】
電子基板126は、図22に示すように、演算手段251とRAM(記憶手段)252とを有し、演算手段251によって第1のフォトセンサ121からの信号によりアーム部材170の回動角度Pを算出する。同様に、演算手段251によって第2のフォトセンサ136からの信号によりアーム部材170の移動距離Nを算出する。演算手段251によってアーム部材170の回動角度Pと移動距離Nから、接触子201のX軸方向の移動位置XとY軸方向の移動位置Yを算出し、表示手段66の表示部67に接触子201の移動位置X,Yを表示する。演算手段251によって第3のフォトセンサ220からの信号により接触子201のZ軸方向の移動位置Zを算出し、表示手段66の表示部67に接触子201の移動位置Zを表示する。電子基板126は、前記移動位置X、Y、Z、移動距離N、回動角度PのデータをRAM(記憶手段)252に記憶させることが出来る。なお、電子基板126の操作ボタン125には、RAM(記憶手段)252に記憶させたデータを消去(リセット)して、表示部67の表示を全て0にするリセットボタン、移動位置の数値を再入力する入力ボタン等が含まれている。
【0079】
測定装置101は、以下のように使用することができる。測定装置101は、電磁石107のスイッチ107aをオフにしておくことにより、磁力が発生していないので容易に持ち運ぶことができる。測定装置101は、強磁性体で形成された基台2上に載置し、電磁石107のスイッチ107aをオンにすることにより、磁力が発生し、基台2に強固にされる。ハンドル195を回転すると、駆動軸191を介して歯車192が回転し、この歯車192と噛み合うラック174により軸部材171が軸方向に移動する。軸部材171は、アーム部材170の一部を構成しているので、アーム部材170全体が軸方向(前後方向)に移送される。
【0080】
アーム部材170は、図18,19に示すように、一番引っ込めた位置(初期位置)から、図20,21に示すように、一番突出させた位置(最終位置)まで、ハンドル195の回転により移送することができる。図19に示すように、測定装置101は、初期位置でのみ、カバー部材230の開口231が電子基板126の操作ボタン125に位置するので開口231から操作ボタン125を操作することができる。しかし、図21に示すように、測定装置101は、初期位置から外れると、操作ボタン125がカバー部材230に覆われるので操作することができなくなる。従って、測定装置101は、操作ミスを軽減することができる構造となっている。
【0081】
測定装置101は、基台2の載置面3に被測定物Aを載置する。測定装置101は、接触子201の高さを調節することができる。調節ハンドル部227を一方に回して、位置調節部材225のネジ部226を緩めることにより、ストッパー片222が取付板210から離れ、装着部材205がガイドレール211に沿って上下方向に摺動可能になり、図17に示すように、接触子201の高さを設定することができる。この設定後に、調節ハンドル部227を他方に回して、位置調節部材225のネジ部226をストッパー片222にねじ込むことにより、ストッパー片222が取付板210に固定され、接触子201の高さが固定される。なお、接触子201の高さは、さらに微調節することができる。
【0082】
ロックボルト223を他方に回動すると微調節用ネジ部材228のネジ部229から外れて微調節用ネジ部材228のロックを解除され、微調節用ネジ部材228を回動することができる。微調節用ネジ部材228を一方に回すと装着部材205が上昇し、微調節用ネジ部材228を他方に回すと装着部材205が下降するので、接触子201の高さの微調節を行うことができる。微調節後、ロックボルト223を一方に回動すると微調節用ネジ部材228のネジ部229に圧接して微調節用ネジ部材228を回動不能にロックする。
【0083】
操作ボタン125のオン・オフスイッチをオンにすると発光装置203が発光して接触子201を照らす。被測定物Aの一点(基準点)に接触子201を接触させ、操作ボタン125のリセットボタンを押して表示手段66の表示部67の数値を0にする。この数値が0となった点が原点となる。接触子201を被測定物Aの任意の位置に接触させる。原点から任意の位置までの接触子201の上下方向の移動距離Mは、第3のフォトセンサ220によって検出され、この検出されたデータに基づいて演算手段251によってZ方向(高さ方向)の位置Zが算出される。この算出されたZ方向の位置データは、表示手段66の表示部67に表示され、同時にRAM(記憶手段)252に記憶されていく。
【0084】
アーム部材170の長手方向の移動は、移送手段150のハンドル195の回転により行うことができ、接触子201を正確且つ確実に所定の位置に移動させることができ、しかも操作者の所望する繊細な動きをさせることができる。接触子201の原点から任意の位置までの移動に伴って、アーム部材170が回動しながら長手方向に移動する。アーム部材170の回動は、前述したように、第1のフォトセンサ121によって検出され、この検出されたデータに基づいて演算手段251によってアーム部材170の回動角度Pが算出される。この算出されたアーム部材170の回動角度Pは、RAM(記憶手段)252に記憶されていく。アーム部材170の長手方向の移動距離Nは、第2のフォトセンサ136によって検出され、この検出されたデータに基づいて演算手段251によって算出される。この算出されたアーム部材170の移動距離Nは、RAM(記憶手段)252に記憶されていく。
【0085】
また、演算手段251は、アーム部材170の移動距離Nと回動角度Pに基づいて接触子201のX方向(横方向)の位置XとY方向(縦方向)の位置Yを算出する。この算出したX方向とY方向の位置データは、表示手段66の表示部67に表示され、同時にRAM(記憶手段)252に記憶されていく。演算手段251は、接触子201の位置X、Y、Zに基づいて、原点から接触子201までの移動距離Lを算出する。電子基板126は、この算出した移動距離Lを表示手段66の表示部67に表示する。また、演算手段251は、接触子201の位置X、Y、Zに基づいて、原点と接触子201を結ぶ線と載置面3との傾斜角θを算出する。電子基板126は、この算出した傾斜角θを表示手段66の表示部67に表示する。前記した移動距離Lのデータと傾斜角θのデータは、RAM(記憶手段)252に記憶される。
【0086】
このように、測定装置101は、任意の位置を原点として、測定位置のX方向(横方向)の位置X、Y方向(縦方向)の位置Y、Z方向(高さ方向)の位置Z、任意の位置から測定位置まで距離L、任意の位置と測定位置を結ぶ線の載置面3に対する傾斜角θを瞬時に算出して、表示手段66の表示部67に表示する。従って、測定装置101は、ノギス等の測定工具よりも簡単に被測定物Aの寸法を測定することが可能である。例えば、図1に示すように、被測定物Aの任意の位置A1に接触子201を接触させ、リセットボタンを押して、表示手段66の表示部67を全て0にする。次に、被測定物Aの任意の位置A2に接触子201を接触させると、表示手段66の表示部67に、任意の位置A2のX方向の位置X、Y方向の位置Y、Z方向の位置Zと、任意の位置A1からA2まで距離L、任意の位置A1とA2を結ぶ線の傾斜角θを瞬時に算出して、表示手段66の表示部67に表示する。上記距離Lが被測定物Aの寸法となる。このようにして、被測定物Aの縦方向、横方向、高さ方向の寸法を迅速且つ簡易に測定することができ、その測定結果が瞬時に表示手段66に表示されるので、一目で寸法を確認することができる。また、測定結果は、RAM(記憶手段)252に記憶されるので、測定結果のデータを管理することができ、電子基板126にプリンタ、プロッタ等の印刷装置69を接続することによって、被測定物Aを図面化することができる。
【0087】
測定装置101は、モータ等の駆動手段を備えておらず、すべて手動で行うため、軽量化、小型化、低コスト化を図ることができる。測定者は、アーム部材170の先端に設けられた接触子201を把持して測定を行うが、接触子201と共にアーム部材170も移動してアーム部材170が測定者側に突出することがないので、アーム部材170が測定のじゃまにならない。また、測定装置101は、従来の測定装置のようにX軸方向又はY軸方向に直線的に移動させながら測定するだけではなく、任意の位置と任意の位置の間の距離と角度を迅速且つ簡易に測定することができ、被測定物Aの外観形状に合わせて柔軟な測定を行うことできる。
【0088】
上記実施の形態では、被測定物Aの任意の位置A1を原点としたが、電子基板126によって原点を最初から設定しておいても構わない。このように設定すると、接触子201を任意の箇所A1に接触させると、演算手段251がその接触位置A1の位置(X1,Y1,Z1)を算出する。次に接触子201を任意の箇所A2に接触させると、演算手段251がその接触位置A2の位置(X2,Y2,Z2)を算出する。さらに演算手段251がA1の位置とA2の位置関係から、任意の位置A1とA2の距離L及び傾斜角θを演算する。このようにして被測定物Aの寸法を測定するようにしても構わない。
【0089】
測定装置101は、従来の簡易な測定手段であるノギスと同様に、フレキシブルで迅速な測定を行うことができる一方、その測定結果が表示手段66に表示され一目でその測定結果を視認することができる。従って、測定装置101は、従来の高度な三次元測定装置と比べて、多品種少量の生産物の測定に有効に活用することができる。また、測定装置101は、部品点数が少なく構造が簡易化されているので、安価に製造することができ、従来の高度な三次元測定装置と比べて、設置の負担が少なくてすみ、中小企業にとっても利用しやすいものになっている。
【産業上の利用可能性】
【0090】
本願発明に係る測定装置は、製造物、加工物等の物品の任意部分の寸法を測定する装置として利用可能である。
【符号の説明】
【0091】
A 被測定物
A1 任意の位置(箇所、接触点、原点)
A2 任意の位置(箇所、接触点)
B 被測定物
B1 側面凹部
X 移動位置(横方向の位置)
Y 移動位置(縦方向の位置)
Z 移動位置(高さ方向の位置)
L 移動距離(被測定物の長さ)
M 移動距離
N 移動距離
P 回転量(回動角度)
θ 傾斜角(角度)
1 測定装置
2 基台
3 載置面
3a 端縁(上端縁)
5 取付枠
6 上板
7 脚板
8 固定板
10 回動体
11 上面
12 下面
13 前面
14 後面
15 左面
16 右面
17 凹部
19 回転軸
20 円板
20a 一方の面(下面)
21 第1のフォトセンサ(第1の検出手段)
22 ブロック片
25 支持板
26 下面
30 ガイド部材
31 ガイド凹部
32 ガイド突起
35 アーム部材
36 ガイド溝
38 一方の面(下面)
39 第2のフォトセンサ(第2の検出手段)
40 摺接部材
41 筒部材
42 測定軸
43 バネ部材(弾性部材)
44 他端
45 接触子
45a 接触子
46 センサケース
47 フランジ
49 第3のフォトセンサ(第3の検出手段)
51 装着部材
52 上部装着部
53 下部装着部
54 取付板
55 縦保持部材
56 横保持部材
57 取付孔
58 割溝
59 ネジ
60 制御手段
61 演算手段
62 RAM(記憶手段)
63 ロータリーエンコーダ
64 水平リニアエンコーダ
65 垂直リニアエンコーダ
66 表示手段
67 表示部
68 操作ボタン
69 印刷装置
101 測定装置
102 装置本体
103 取付台
105 取付板
106 下面
107 電磁石
107a スイッチ
108 上面
109 回転台
110 旋回枠体
111 下枠体
112 上枠体
113 下壁
115 下左側壁
116 下右側壁
117 中間壁
119 支軸
121 第1の検出手段(第1のフォトセンサ)
122 ケース
125 操作ボタン
126 電子基板
128 上左側壁
129 上右側壁
130 上壁
131 仕切壁
132 上面
133 下面
135 枠部材
136 第2の検出手段(第2のフォトセンサ)
139 ブロック
141 ガイド部材
142 ガイド凹部
143 ガイド突起
150 移送手段
151 枠部材
152 前壁
153 後壁
154 左壁
155 右壁
156 底壁
157 天壁
161 ガイド筒
162 ガイド筒
163 挿通孔
165 軸受孔
166 被検出板
170 アーム部材
171 軸部材
172 軸部材
173 ガイド軸
173a ガイド溝
174 ラック
175 後部連結部材
176 連結板
177 差込穴
178 差込穴
179 上部ブロック片
181 下部ブロック片
182 差込溝
183 差込凹部
184 中間ブロック片
185 前部連結部材
186 連結板
187 差込管
188 差込管
190 ブロック片
191 駆動軸
192 歯車
193 突出部
195 ハンドル
196 差込溝
197 差込凹部
200 摺接部材
201 接触子
203 発光装置
204 微調節用ブロック
205 装着部材(スライド部材)
206 縦保持部材
207 横保持部材
208 突片
209 裏面
210 取付板
211 ガイドレール
212 ガイド溝
215 摺動体
216 ガイド凹部
217 ガイド突起
220 第3の検出手段(第3のフォトセンサ)
221 スライド溝
222 ストッパー片
223 ロックボルト
225 位置調節部材(固定手段)
226 ネジ部
227 調節ハンドル部
228 微調節用ネジ部材
229 ネジ部
230 カバー部材
231 開口
241 ロータリーエンコーダ
242 水平リニアエンコーダ
243 垂直リニアエンコーダ
251 演算手段
252 RAM(記憶手段)
【技術分野】
【0001】
本発明は、被測定物を載置台に載せ、被測定物の外観形状の寸法を測定する測定装置に関する。
【背景技術】
【0002】
従来、被測定物の外観形状の寸法を測定する手段として、簡易なノギスと、高度な三次元測定装置がある。ノギスは、柔軟性に優れ、任意の箇所の細部を簡単に測定できる。一方、高度な測定装置は、被測定物を載置する載置面を備えた基台と、前記基台の載置面と略平行の面でX軸方向に移動可能な第1のガイド部材と、この第1のガイド部材上をY軸方向に移動可能な第2のガイド部材と、この第2のガイド部材上をZ軸方向に移動可能な接触子とを有する。さらに従来の測定装置は、前記第1のガイド部材の駆動手段と、前記第1のガイド部材のX軸方向の移動距離を検出する第1の検出手段と、前記第2のガイド部材の駆動手段と、前記第2のガイド部材のY軸方向の移動距離を検出する第2の検出手段と、前記接触子のZ軸方向の移動距離を検出する第3の検出手段とを有する(例えば、特許文献1)。
【0003】
上記従来の測定装置は、前記第1の検出手段によって検出された前記第1のガイド部材のX軸方向の移動距離と、前記第2の検出手段によって検出された前記第2のガイド部材のY軸方向の移動距離と、前記第3の検出手段によって検出された前記接触子のZ軸方向の移動距離を演算して、接触子の移動位置を算出するようになっている。この従来の測定装置は、基台の載置面に被測定物を載置し、被測定物に接触子を接触させ、接触子を被測定物の外形輪郭に接触させながら移動させると、前記したように、接触子のX軸方向の移動距離を第1の検出手段が検出し、接触子のY軸方向の移動距離を第2の検出手段が検出し、接触子のZ軸方向の移動距離を第3の検出手段が検出して、被測定物の三次元方向の寸法を測定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】実開平2−12613号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
簡易な測定手段としてのノギスは、フレキシブルな測定ができるが、測定した値を読むことが難しく誰でもが簡単に使いこなせるものではないという問題点があった。さらに、ノギスは縦横高さ等の寸法を測定することはできるがその位置の傾斜角度を測定することはできないという問題点があった。また、高度な測定手段である上記従来の測定装置は、接触子を移動させるのに、X軸方向に移動可能な第1のガイド部材と、Y軸方向に移動可能な第2のガイド部材を必要とするので、構造が複雑で安価に製造することができず、重量が嵩むため持ち運びが不便であるという問題点があった。さらに、第1のガイド部材のX軸方向の移動と、第2のガイド部材のY軸方向の移動は、駆動モータによって行われるため、測定位置の決まっている大量生産物の測定には適しているが、被測定物の任意の位置に接触子を接触させて測定することができないので、多品種少量の生産物(加工物)の測定には適していないという問題点があった。このように、従来の高度な測定装置は、被測定物の任意の部分の寸法を測定することができない等、被測定物の形状に合わせた柔軟な測定ができないという問題点があった。
【0006】
本願発明は、上記問題点に鑑み案出したものであって、構造が簡単で安価に製造でき、持ち運びが便利であると共に被測定物の任意の位置に接触子を極めて簡単に接触させて任意の部分の寸法を容易に測定することができる測定装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
本願請求項1に係る測定装置は、上記目的を達成するため、被測定物の寸法を測定する測定装置であって、被測定物を載置する載置面を備えた基台上に取り付けられる装置本体を有し、装置本体は、基台上に固定して取り付けられる取付台と、前記取付台に前記基台の載置面と略平行の面方向に回動可能に取り付けられた旋回枠体とを備え、前記旋回枠体には、前記基台の載置面と略平行の面方向で且つ長手方向に摺動可能となるアーム部材と、前記アーム部材を長手方向に送る移送手段とが設けられ、前記アーム部材の先部には、前記基台の載置面と略直角の方向に移動可能となるようにして接触子が取り付けられており、前記取付台又は前記旋回枠体には、前記アーム部材の回動角度を検出する第1の検出手段が設けられ、前記旋回枠体には、前記アーム部材の長手方向の移動距離を検出する第2の検出手段が設けられ、前記アーム部材には、前記接触子の移動距離を検出する第3の検出手段が設けられていることを特徴とする。
【0008】
本願請求項2に係る測定装置は、上記目的を達成するため、前記アーム部材は、一対の軸部材を有し、前記移送手段は、一対の軸部材の一方に形成されたラックと噛み合う歯車と、歯車を強制的に回転させる回転ハンドルとからなることを特徴とする。
【0009】
本願請求項3に係る測定装置は、上記目的を達成するため、前記接触子は、スライド部材に取り付けられており、前記スライド部材は、アーム部材に上下方向にスライド可能に取り付けられ、かつ所定位置で固定手段によりアーム部材に固定することができるように構成されていることを特徴とする。
【0010】
本願請求項4に係る測定装置は、上記目的を達成するため、被測定物の任意の箇所を原点として、当該原点から接触子の接触点の位置を算出する演算手段を有し、演算手段は、前記第1の検出手段によって検出されたアーム部材の回動角度と、前記第2の検出手段によって検出されたアーム部材の長手方向の移動距離を演算して接触子の接触点の縦方向と横方向の位置を算出すると共に、前記第3の検出手段によって検出された接触子の移動距離を演算して接触子の接触点の高さ方向の位置を算出することを特徴とする。
【0011】
本願請求項5に係る測定装置は、上記目的を達成するため、前記演算手段は、前記算出結果に基づいて、さらに原点から接触子の接触点までの距離と載置面に対する角度を算出することを特徴とする。
【0012】
本願請求項6に係る測定装置は、上記目的を達成するため、前記演算手段及び演算手段のオン及びオフを行う操作ボタンが前記取付台又は前記旋回枠体に設けられていることを特徴とする。
【0013】
本願請求項7に係る測定装置は、上記目的を達成するため、前記アーム部材には、アーム部材、旋回枠体及び取付台をカバーするカバー部材が設けられ、当該カバー部材は、アーム部材と共に移動可能であり、アーム部材の旋回枠体及び取付台に対する所定位置において、前記操作ボタンを操作することができる開口が形成されていることを特徴とする。
【0014】
本願請求項8に係る測定装置は、上記目的を達成するため、前記演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置を表示する表示手段が設けられていることを特徴とする。
【0015】
本願請求項9に係る測定装置は、上記目的を達成するため、前記演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置及び原点から接触点までの距離並びに載置面に対する角度を表示する表示手段が設けられていることを特徴とする。
【0016】
本願請求項10に係る測定装置は、上記目的を達成するため、前記演算手段によって算出された算出結果を記憶する記憶手段が設けられていることを特徴とする。
【発明の効果】
【0017】
本願発明に係る測定装置は、被測定物を基台の載置面に載置し、接触子を被測定物の任意の位置に接触させ、次に接触子を被測定物の他の任意の位置に接触させることにより、被測定物の二つの任意の位置の間の寸法を測定することができる。即ち、接触子の移動に伴って、接触子の移動距離が第3の検出手段によって検出され、被測定物の高さ方向の距離が検出される。また、接触子の移動に伴って、アーム部材が回動しながら長手方向に移動し、第1の検出手段によってアーム部材の回動角度が検出され、第2の検出手段によってアーム部材の長手方向の移動距離が検出される。このように、本願発明に係る測定装置は、接触子を把持し、被測定物の任意の位置に簡単且つ迅速に接触させることができ、しかも被測定物の二つの任意の位置の間の寸法を簡単に測定することができるので、操作が極めて容易であるという効果がある。また、本願発明に係る測定装置は、アーム部材だけで接触子を移動させることができるので、部品点数が少なく、構造が簡単で安価であり、さらに軽量化を図ることができ、持ち運びが便利であるという効果がある。また、本願発明に係る測定装置は、アーム部材を移送手段によって長手方向に送ることができるので、接触子を正確且つ確実に作業者の所望する位置に移動させることができるという効果がある。
【0018】
本願発明に係る測定装置は、前記移送手段が一対の軸部材の一方に形成されたラックと噛み合う歯車と、歯車を強制的に回転させる回転ハンドルとからなるので、簡単に操作することができ、しかも安価に製造することができるという効果がある。
【0019】
本願発明に係る測定装置は、接触子がアーム部材に上下方向にスライド可能に取り付けられたスライド部材に取り付けられているので、被測定物に合わせて接触子の高さを調節することができるという効果がある。
【0020】
本願発明に係る測定装置は、アーム部材の回動角度を第1の検出手段が検出し、アーム部材の長手方向の移動距離を第2の検出手段が検出し、演算手段が第1の検出手段によって検出したデータと第2の検出手段が検出したデータに基づいて接触子の接触点の横方向(X方向)と縦方向(Y方向)の位置を算出せしめ、さらに演算手段が第3の検出手段によって検出したデータに基づいて接触子の接触点の高さ方向(Z方向)の位置を算出せしめて、接触子の接触点の位置を容易に導き出すことができる。このようにして、本願発明に係る測定装置は、被測定物の任意の2箇所の位置の一方を原点とし、他方に接触子を接触させると、この他方の位置が演算手段によって算出され、原点に対する他方の箇所の横方向(X方向)と縦方向(Y方向)と高さ方向(Z方向)の位置を容易に導き出すことができるという効果がある。
【0021】
本願発明に係る測定装置は、演算手段によって算出された算出結果、即ち、原点に対する他方の箇所の横方向(X方向)と縦方向(Y方向)と高さ方向(Z方向)の位置に基づいて、原点から接触子の接触点までの距離と載置面に対する角度を算出することができ、この被測定物の任意の2箇所の間の寸法及び傾斜角を簡単に測定することができるという効果がある。
【0022】
本願発明に係る測定装置は、前記演算手段及び演算手段のオン及びオフを行う操作ボタンが前記取付台又は前記旋回枠体に設けられているので、操作が容易であるという効果がある。
【0023】
本願発明に係る測定装置は、アーム部材、旋回枠体及び取付台をカバーするカバー部材が設けられ、当該カバー部材は、アーム部材の所定位置において、前記操作ボタンを操作することができる開口が形成されているので、アーム部材の所定位置以外では操作することができず、操作ミスを減らすことができるという効果がある。
【0024】
本願発明に係る測定装置は、演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置及び原点から接触点までの距離並びに載置面に対する角度を表示する表示手段が設けられているので、被測定物の寸法を一目で把握することが出来るという効果がある。
【0025】
本願発明に係る測定装置は、演算手段によって算出された算出結果を記憶する記憶手段が設けられているので、算出結果のデータを管理することができ、プリンター、プロッター等の印刷装置に接続して、被測定物を図面化することができるという効果がある。
【図面の簡単な説明】
【0026】
【図1】本願発明に係る測定装置の一つの実施の形態を示す全体斜視図である。
【図2】図1の測定装置の側面断面図である。
【図3】図1の測定装置の要部正面断面図である。
【図4】図1の測定装置の表示手段の正面図である。
【図5】図1の測定装置の制御系のブロック図である。
【図6】被測定物の測定方法を説明する斜視図である。
【図7】他の測定装置の要部説明図である。
【図8】測定装置の利用形態を示す要部側面図である。
【図9】本願発明に係る測定装置の他の実施の形態を示す全体側面図である。
【図10】図9の測定装置の矢視B正面図である。
【図11】図9の測定装置の側面断面説明図である。
【図12】図9の測定装置の移送手段の説明平面図である。
【図13】図9の測定装置の移送手段の正面断面図である。
【図14】図9の測定装置のアーム部材の説明図である。
【図15】図9の接触子の取付構成を説明する説明図である。
【図16】図9の測定装置のカバー部材の側面図である。
【図17】図9の接触子の動きを説明する側面図である。
【図18】図9の測定装置の初期位置を示す側面図である。
【図19】図9の測定装置の初期位置を示すカバー部材を装着した側面図である。
【図20】図9の測定装置の最終位置を示す側面図である。
【図21】図9の測定装置の最終位置を示すカバー部材を装着した側面図である。
【図22】図9の測定装置の制御系のブロック図である。
【発明を実施するための最良の形態】
【0027】
本願発明に係る測定装置の概要を図1乃至図21に基づいて説明する。図9に示すように、測定装置101は、被測定物Aの寸法を測定するものであって、被測定物Aを載置する載置面3を備えた基台2上に取り付けられる装置本体102を有する。装置本体102は、基台2上に固定して取り付けられる取付台103と、前記取付台103に前記基台2の載置面3と略平行の面方向に回動可能に取り付けられた旋回枠体110とを備えている。前記旋回枠体110には、前記基台2の載置面3と略平行の面方向で且つ長手方向に摺動可能となるアーム部材170と、前記アーム部材170を長手方向に送る移送手段150とが設けられている。
【0028】
前記アーム部材170の先部には、前記基台2の載置面3と略直角の方向に移動可能となるようにして接触子201が取り付けられており、前記取付台103又は前記旋回枠体110には、前記アーム部材170の回動角度Pを検出する第1の検出手段121が設けられている。前記旋回枠体110には、前記アーム部材170の長手方向の移動距離Nを検出する第2の検出手段136が設けられている。前記アーム部材170には、前記接触子201の移動距離Mを検出する第3の検出手段220が設けられている。
【0029】
測定装置101は、図1に示すように、被測定物Aを基台2の載置面3に載置し、接触子201を被測定物Aの任意の位置A1に接触させ、次に接触子201を被測定物Aの他の任意の位置A2に接触させることにより、被測定物Aの二つの任意の位置A1,A2の間の寸法を測定することができる。即ち、接触子201の移動に伴って、接触子201の移動距離Mが第3の検出手段220によって検出され、被測定物Aの高さ方向の距離が検出される。また、接触子201の移動に伴って、アーム部材170が回動しながら長手方向に移動し、第1の検出手段121によってアーム部材170の回動角度Pが検出され、第2の検出手段136によってアーム部材170の長手方向の移動距離Nが検出される。
【0030】
このように、測定装置101は、接触子201を把持し、被測定物Aの任意の位置A1,A2に簡単且つ迅速に接触させることができ、しかも被測定物Aの二つの任意の位置A1,A2の間の寸法を簡単に測定することができるので、操作が極めて容易である。また、測定装置101は、アーム部材170だけで接触子201を移動させることができるので、部品点数が少なく、構造が簡単で安価であり、さらに軽量化を図ることができ、持ち運びが便利である。また、測定装置101は、アーム部材170を移送手段150によって長手方向に送ることができるので、接触子201を正確且つ確実に作業者の所望する位置に移動させることができる。
【0031】
測定装置101のアーム部材170は、図12,13に示すように、一対の軸部材171,172を有する。前記移送手段150は、一対の軸部材171,172の一方171に形成されたラック174と噛み合う歯車192と、歯車192を強制的に回転させる回転ハンドル195とからなるので、簡単に操作することができ、しかも安価に製造することができる。
【0032】
測定装置101の前記接触子201は、図15に示すように、スライド部材205に取り付けられている。前記スライド部材205は、アーム部材170に上下方向にスライド可能に取り付けられ、かつ所定位置で固定手段225によりアーム部材170に固定することができるように構成されているので、被測定物Aに合わせて接触子201の高さを調節することができる。
【0033】
測定装置101は、被測定物Aの任意の箇所A1を原点として、当該原点A1から接触子201の接触点の位置A2を算出する演算手段251を有する。演算手段251は、前記第1の検出手段121によって検出されたアーム部材170の回動角度Pと、前記第2の検出手段136によって検出されたアーム部材170の長手方向の移動距離Nを演算して接触子201の接触点A2の縦方向と横方向の位置Y,Xを算出すると共に、前記第3の検出手段220によって検出された接触子201の移動距離Mを演算して接触子201の接触点A2の高さ方向の位置Zを算出する。
【0034】
測定装置101は、アーム部材170の回動角度Pを第1の検出手段121が検出し、アーム部材170の長手方向の移動距離Nを第2の検出手段136が検出し、演算手段251が第1の検出手段121によって検出したデータと第2の検出手段136が検出したデータに基づいて接触子201の接触点の横方向(X方向)と縦方向(Y方向)の位置X、Yを算出せしめ、さらに演算手段251が第3の検出手段220によって検出したデータに基づいて接触子201の接触点の高さ方向(Z方向)の位置Zを算出せしめて、接触子201の接触点の位置X、Y、Zを容易に導き出すことができる。このようにして、測定装置101は、被測定物Aの任意の2箇所の位置の一方A1を原点とし、他方A2に接触子201を接触させると、この他方の位置A2が演算手段251によって算出され、原点A1に対する他方の箇所A2の横方向(X方向)と縦方向(Y方向)と高さ方向(Z方向)の位置X、Y、Zを容易に導き出すことができる。
【0035】
測定装置101は、演算手段251によって算出された算出結果、即ち、原点に対する他方の箇所の横方向(X方向)と縦方向(Y方向)と高さ方向(Z方向)の位置X、Y、Zに基づいて、原点A1から接触子201の接触点A2までの距離Lと載置面3に対する角度θを算出することができ、この被測定物Aの任意の2箇所A1,A2の間の寸法L及び傾斜角θを簡単に測定することができる。
【0036】
測定装置101は、前記演算手段251及び演算手段251のオン及びオフを行う操作ボタン125が前記取付台103又は前記旋回枠体110に設けられているので、操作が容易である。又、測定装置101は、アーム部材170に、アーム部材170、旋回枠体110及び取付台103をカバーするカバー部材230が設けられている。当該カバー部材230は、アーム部材170と共に移動可能であり、アーム部材170の旋回枠体110及び取付台103に対する所定位置において、前記操作ボタン125を操作することができる開口231が形成されているので、アーム部材170の所定位置以外では操作することができず、操作ミスを減らすことができる。
【0037】
測定装置101は、演算手段251によって算出された接触子201の接触点の縦方向、横方向、高さ方向の位置X、Y、Z及び原点A1から接触点A2までの距離L並びに載置面3に対する角度θを表示する表示手段66が設けられているので、被測定物Aの寸法を一目で把握することが出来る。
【0038】
測定装置101は、演算手段251によって算出された算出結果を記憶する記憶手段252が設けられているので、算出結果のデータを管理することができ、プリンター、プロッター等の印刷装置69に接続して、被測定物Aを図面化することができる。
【0039】
最初に測定装置1について詳細に説明する。図1に示すように、測定装置1は、被測定物Aを載置する載置面3を備えた基台2を有する。基台2は、載置面3が略水平面となるようにして設置される。載置面3の端縁(上端縁)3a近傍には、取付枠5が設けられている。図3に示すように、取付枠5は、上板6と、上板6の両端にネジ等によって固定された脚板7,7と、脚板7,7の下端に形成された固定板8,8とからなる。取付枠5は、固定板8,8をネジ等によって基台2の載置面3に固定して取り付けられている。上板6は、載置面3と略平行となっている。
【0040】
取付枠5の上板6には、回動体10が回動可能に取り付けられている。回動体10は、略直方体状に形成され、上面11と、下面12と、前面13と、後面14と、左面15と、右面16を有している。上面11には、前面13から後面14まで伸びる凹部17が形成されている。回動体10は、下面12に回転軸19が形成されている。回動体10は、下面12が載置面3に摺接し、上板6に形成された軸穴から回転軸19が下方に突出している。回転軸19の下端には、円板20が取り付けられている。円板20の一方の面(下面)20aには、第1のフォトセンサ(第1の検出手段)21によって円板20の回転量Pが検出される微細な凹凸が、円板20の中心から放射状に所定間隔あけて連続形成されている。この第1のフォトセンサ21は、取付枠5の一方の脚板7にネジ等により取り付けられている。この第1のフォトセンサ21と円板20とでロータリーエンコーダ63を構成する。
【0041】
回動体10の上面11であって、前記凹部17を挟んだ両側には、ブロック片22,22が固定して取り付けられている。この両ブロック片22,22には、支持板25がネジ等によって固定して設けられている。支持板25の下面26には、ガイド部材30がネジ等により固定して取り付けられている。ガイド部材30には、前記回転軸19を中心として、回動体10の前面13(後面14)と直角方向に伸びるガイド凹部31が形成されている。ガイド凹部31の両側には、対向してガイド突起32,32が形成されている。
【0042】
前記ガイド部材30のガイド凹部31には、断面が略矩形状のアーム部材35が摺動可能に取り付けられている。即ち、アーム部材35は、短手方向の両側面に前記ガイド突起32,32に案内されるガイド溝36,36が形成されている。図1,3に示すように、アーム部材35は、前記ガイド溝36,36が前記ガイド突起32,32に案内され、基台2の載置面3と略平行で、且つ、回動体10の前後方向(アーム部材35の長手方向)に摺動可能となっている。このアーム部材35の短手方向の中心線と、回転軸19の中心は常に一致するようになっている。アーム部材35の一方の面(下面)38には、第2のフォトセンサ(第2の検出手段)39によってアーム部材35の長手方向の移動(摺動)距離Nが検出される微細な凹凸が長手方向に向かって所定間隔あけて連続形成されている。この第2のフォトセンサ39は、回動体10の後面14にネジ等により取り付けられている。この第2のフォトセンサ39とアーム部材35の下面38で水平リニアエンコーダ64を構成する。なお、アーム部材35の回転量は、アーム部材35の回転が回動体10を介して円板20に伝達されるため、第1のフォトセンサ(第1の検出手段)21によって検出される。従って、アーム部材35の回転量は、円板20の回転量Pと同じである。
【0043】
図2に示すように、アーム部材35の先端には、摺接部材40が設けられている。摺接部材40は、筒部材41と、筒部材41内に移動可能に設けられた測定軸42と、測定軸42を載置面3側に付勢するバネ部材(弾性部材)43を有する。前記筒部材41は、アーム部材35の先端に固定された装着部材51に取り付けられている。装着部材51は、略L字状の上部装着部52と、同じく略L字状の下部装着部53とからなる。下部装着部53は、縦保持部材55と、縦保持部材55の下端に一体的に設けられた横保持部材56とからなる。横保持部材56には、上下方向(載置面3と略直角の方向)に向かって形成された取付孔57と、取付孔57の内径を調節するための割溝58と、割溝58の隙間を調節するネジ59とが設けられている。なお、図7に示すように、上部装着部52と、下部装着部53を分離し、上部装着部52の下端に取付板54を形成し、当該取付板54に下部装着部53をネジ等により着脱可能に取り付ける構成にしても良い。
【0044】
前記筒部材41は、前記取付孔57内に挿通してネジ59を締めると、割溝58の隙間が狭められて取付孔57の内径が小さくなり、そのため取付孔57の内面が圧接するので、取付孔57に固定して取り付けられる。筒部材41内を摺動する測定軸42は、中心線が前記アーム部材35の中心線と略同じ位置となり、上下方向(載置面3と略直角の方向)に移動可能となる。測定軸42は、筒部材41の両端(上下端)から突出し、一端(下端)に接触子45が設けられている。前記バネ部材(弾性部材)43は、接触子45と筒部材41の間の測定軸42に巻装され、接触子45を下方向(載置面3側)に向かって付勢し、接触子45を載置面3に接触させる。
【0045】
図2に示すように、測定軸42の他端44は、センサケース46内に収納されている。センサケース46内には、測定軸42の軸方向(上下方向)の移動距離Mを検出する第3のフォトセンサ(第3の検出手段)49が設けられている。センサケース46は、前記筒部材41の他端(上端)に形成されたフランジ47と、下部装着部53の縦保持部材55に固定して取り付けられている。この第3のフォトセンサ49と測定軸42の他端44で垂直リニアエンコーダ65を構成する。
【0046】
基台2には、前記第1のフォトセンサ21と、第2のフォトセンサ39と、第3のフォトセンサ49とに接続される制御手段60と、制御手段60に接続される表示手段66とを有する。表示手段66は表示部67を有し、表示部67に接触子45のX軸方向の移動位置(横方向の位置)Xと、接触子45のY軸方向の移動位置(縦方向の位置)Yと、接触子45のZ軸方向の移動位置(高さ方向の位置)Zと、接触子45の移動距離Lと、接触子45の傾斜角度θが表示される。
【0047】
制御手段60は、演算手段61とRAM(記憶手段)62とを有し、演算手段61によって第1のフォトセンサ21からの信号によりアーム部材35の回動角度Pを算出する。同様に、演算手段61によって第2のフォトセンサ39からの信号によりアーム部材35の移動距離Nを算出する。演算手段61によってアーム部材35の回動角度Pと移動距離Nから、接触子45のX軸方向の移動位置XとY軸方向の移動位置Yを算出し、表示手段66の表示部67に接触子45の移動位置X,Yを表示する。演算手段61によって第3のフォトセンサ49からの信号により接触子45のZ軸方向の移動位置Zを算出し、表示手段66の表示部67に接触子45の移動位置Zを表示する。制御手段60は、前記移動位置X、Y、Z、移動距離N、回動角度PのデータをRAM(記憶手段)62に記憶させることが出来る。なお、表示手段66には、測定装置1を操作する操作ボタン68を有する。この操作ボタン68には、RAM(記憶手段)62に記憶させたデータを消去(リセット)して、表示部67の表示を全て0にするリセットボタン、移動位置の数値を再入力する入力ボタン等が含まれている。
【0048】
測定装置1は、基台2の載置面3に被測定物Aを載置する。被測定物Aの一点(基準点)に接触子45を接触させ、リセットボタンを押して表示手段66の表示部67の数値を0にする。この数値が0となった点が原点となる。接触子45を被測定物Aの任意の位置に接触させる。原点から任意の位置までの接触子45の上下方向の移動距離Mは、第3のフォトセンサ49によって検出され、この検出されたデータに基づいて演算手段61によってZ方向(高さ方向)の位置Zが算出される。この算出されたZ方向の位置データは、表示手段66の表示部67に表示され、同時にRAM(記憶手段)62に記憶されていく。
【0049】
接触子45の原点から任意の位置までの移動に伴って、アーム部材35が回動しながら長手方向に移動する。アーム部材35の回動は、前述したように、第1のフォトセンサ21によって検出され、この検出されたデータに基づいて演算手段61によってアーム部材35の回動角度Pが算出される。この算出されたアーム部材35の回動角度Pは、RAM(記憶手段)62に記憶されていく。アーム部材35の長手方向の移動距離Nは、第2のフォトセンサ39によって検出され、この検出されたデータに基づいて演算手段61によって算出される。この算出されたアーム部材35の移動距離Nは、RAM(記憶手段)62に記憶されていく。
【0050】
また、演算手段61は、アーム部材35の移動距離Nと回動角度Pに基づいて接触子45のX方向(横方向)の位置XとY方向(縦方向)の位置Yを算出する。この算出したX方向とY方向の位置データは、表示手段66の表示部67に表示され、同時にRAM(記憶手段)62に記憶されていく。演算手段61は、接触子45の位置X、Y、Zに基づいて、原点から接触子45までの移動距離Lを算出する。制御手段60は、この算出した移動距離Lを表示手段66の表示部67に表示する。また、演算手段61は、接触子45の位置X、Y、Zに基づいて、原点と接触子45を結ぶ線と載置面3との傾斜角θを算出する。制御手段60は、この算出した傾斜角θを表示手段66の表示部67に表示する。前記した移動距離Lのデータと傾斜角θのデータは、RAM(記憶手段)62に記憶される。
【0051】
このように、測定装置1は、任意の位置を原点として、測定位置のX方向(横方向)の位置X、Y方向(縦方向)の位置Y、Z方向(高さ方向)の位置Z、任意の位置から測定位置まで距離L、任意の位置と測定位置を結ぶ線の載置面3に対する傾斜角θを瞬時に算出して、表示手段66の表示部67に表示する。従って、測定装置1は、ノギス等の測定工具よりも簡単に被測定物Aの寸法を測定することが可能である。例えば、図1に示すように、被測定物Aの任意の位置A1に接触子45を接触させ、リセットボタンを押して、表示手段66の表示部67を全て0にする。次に、被測定物Aの任意の位置A2に接触子45を接触させると、表示手段66の表示部67に、任意の位置A2のX方向の位置X、Y方向の位置Y、Z方向の位置Zと、任意の位置A1からA2まで距離L、任意の位置A1とA2を結ぶ線の傾斜角θを瞬時に算出して、表示手段66の表示部67に表示する。上記距離Lが被測定物Aの寸法となる。このようにして、被測定物Aの縦方向、横方向、高さ方向の寸法を迅速且つ簡易に測定することができ、その測定結果が瞬時に表示手段66に表示されるので、一目で寸法を確認することができる。また、測定結果は、RAM(記憶手段)62に記憶されるので、測定結果のデータを管理することができ、制御手段60にプリンタ、プロッタ等の印刷装置69を接続することによって、被測定物Aを図面化することができる。
【0052】
測定装置1は、モータ等の駆動手段を備えておらず、すべて手動で行うため、軽量化、小型化、低コスト化を図ることができる。測定者は、アーム部材35の先端に設けられた接触子45を把持して測定を行うが、接触子45と共にアーム部材35も移動してアーム部材35が測定者側に突出することがないので、アーム部材35が測定のじゃまにならない。また、測定装置1は、従来の測定装置のようにX軸方向又はY軸方向に直線的に移動させながら測定するだけではなく、任意の位置と任意の位置の間の距離と角度を迅速且つ簡易に測定することができ、被測定物Aの外観形状に合わせて柔軟な測定を行うことできる。
【0053】
また、接触子45を測定軸42に着脱交換できるようにしても良い。このようにすれば、上記実施の形態では、接触子45の先端が下方に向いているが、図7に示すように、先端が水平方向に向いた接触子45aを測定軸42に取り付けることが可能となる。この形状の接触子45aによれば、被測定物Bの側面凹部B1の内側面の寸法を測定することが可能となる。
【0054】
上記実施の形態では、被測定物Aの任意の位置A1を原点としたが、制御手段60によって原点を最初から設定しておいても構わない。このように設定すると、接触子45を任意の箇所A1に接触させると、演算手段61がその接触位置A1の位置(X1,Y1,Z1)を算出する。次に接触子45を任意の箇所A2に接触させると、演算手段61がその接触位置A2の位置(X2,Y2,Z2)を算出する。さらに演算手段61がA1の位置とA2の位置関係から、任意の位置A1とA2の距離L及び傾斜角θを演算する。このようにして被測定物Aの寸法を測定するようにしても構わない。
【0055】
さらに、上記実施の形態では、被測定物Aの寸法を測定するために摺接部材40をアーム部材5の先部に取り付けたが、摺接部材40を取り外してポンチ等の工具を取り付けても良い。例えば、図8に示すように、上部装着部52と、下部装着部53を分離し、上部装着部52の下端に取付板54を形成し、当該取付板54に下部装着部53をネジ等により着脱可能に取り付ける構成にする。下部装着部53に工具を装着して上部装着部52に固定する。このようにすれば、工具の先端の位置は、表示手段66の表示部67にX、Y、Zで表示される。この表示された位置X、Y、Zを確認しながら、材料に工具で穴等の目印を正確に付けることができる。
【0056】
測定装置1は、従来の簡易な測定手段であるノギスと同様に、フレキシブルで迅速な測定を行うことができる一方、その測定結果が表示手段66に表示され一目でその測定結果を視認することができる。従って、測定装置1は、従来の高度な三次元測定装置と比べて、多品種少量の生産物の測定に有効に活用することができる。また、測定装置1は、部品点数が少なく構造が簡易化されているので、安価に製造することができ、従来の高度な三次元測定装置と比べて、設置の負担が少なくてすみ、中小企業にとっても利用しやすいものになっている。
【0057】
さらに、測定装置1の他の実施の形態となる測定装置101について詳細に説明する。図9乃至11に示すように、測定装置101は、被測定物Aを載置する載置面3を備えた基台2上に固定して取り付けられる。測定装置101は、基台2上に取り付けられる装置本体102を有する。装置本体102は、基台2上に固定して取り付けられる取付台103と、取付台103に基台2の載置面3と略平行の面方向(水平方向)に回動可能に取り付けられた旋回枠体110とを備えている。
【0058】
取付台103は、取付板105と、取付板105の下面106左右両側に配置固定された電磁石107,107と、取付板105の上面108に設けられた円板状の回転台109とからなる。電磁石107は、オン・オフを行うスイッチ107aを備えている。この回転台109には、前記旋回枠体110が回動可能に取り付けられている。旋回枠体110は、下枠体111と、下枠体111の上部に固定された上枠体112とからなる。
【0059】
下枠体111は、矩形状の下壁113と、下壁113の左右両側に設けられた下左側壁115及び下右側壁116と、下左側壁115及び下右側壁116の上端に設けられた中間壁117とからなる。前記取付板105には、回転台109、下壁113及び中間壁117を貫通して下枠体111の回転中心を構成する支軸119が固定されている。
【0060】
前記下壁113には、下枠体111の回転量(回転角度)Pを検出する第1の検出手段121が設けられている。第1の検出手段121は、下壁113に固定されたケース122に取り付けられた第1のフォトセンサ等であって、ケース122内の支軸119に固定された図示しない円板に放射状に連続形成された微細な凹凸を読み取って下枠体111の回転量Pを検出する。この第1のフォトセンサ121と円板とでロータリーエンコーダ241を構成する。ケース122上には、オン・オフスイッチ等の操作ボタン125を有する電子基板126が設けられている。
【0061】
上枠体112は、中間壁117の左右両側に設けられた上左側壁128及び上右側壁129と、上左側壁128及び上右側壁129の上端に設けられた上壁130とからなる。上枠体112の略中央には、仕切壁131が設けられ、仕切壁131の上面132に第2の検出手段136が設けられ、仕切壁131の下面133にガイド部材141が設けられている。第2の検出手段136は、仕切壁131の上面132に固定された略コ字状の枠部材135に取り付けられた第2のフォトセンサ等である。
【0062】
ガイド部材141は、仕切壁131の下面133にブロック139を介して固定して取り付けられている。ガイド部材141には、前記支軸119を中心として、前後方向に伸びるガイド凹部142が形成されている。ガイド凹部142の両側には、対向してガイド突起143,143が形成されている。
【0063】
旋回枠体110の上部、即ち上枠体112の上壁130には、図9に示すように、アーム部材170を長手方向に送る移送手段150が設けられている。移送手段150は、図12,13に示すように、枠部材151と、枠部材151の下部に設けられた底壁156と、枠部材151の上部に設けられた天壁157を有する。枠部材151は、前壁152と、後壁153と、左壁154と、右壁155とで略ロ字状に形成されている。
【0064】
前壁152及び後壁153には、アーム部材170を構成する一対の軸部材171,172を軸方向に案内するガイド筒161,162が設けられている。即ち右方の軸部材172は、前壁152及び後壁153の右側に配置されたガイド筒161,161によって軸方向に摺動可能に保持され、左方の軸部材171は、前壁152及び後壁153の左側に配置されたガイド筒162,162によって軸方向に摺動可能に保持されている。天壁157には駆動軸191の上部を挿通する挿通孔163が形成されている。底壁156には、駆動軸191の下部を軸受けする軸受孔165が形成されている。
【0065】
アーム部材170は、略水平方向と平行に並設された一対の軸部材171,172と、前記一対の軸部材171,172の略中心下方に設けられたガイド軸173と、軸部材171,172及びガイド軸173の後部を連結する後部連結部材175と、軸部材171,172及びガイド軸173の前部を連結する前部連結部材185とからなる。また、後部連結部材175と前部連結部材185の間であって、ガイド軸173の上方には、被検出板166が設けられている。軸部材171,172は、円軸状に形成され、一方の軸部材171の側面には、軸方向(長手方向)に向かってラック174が形成されている。また、ガイド軸173は、左右両側面に前記ガイド凹部142のガイド突起143,143に案内されるガイド溝173a,173aが形成されている。
【0066】
後部連結部材175は、図9,図14(c)に示すように、連結板176を有する。連結板176の上部には、前記一対の軸部材171,172の後部を差し込んで固定する差込穴177,178を有する上部ブロック片179が設けられている。また、連結板176の下部には、前記ガイド軸173の後部を差し込んで固定する差込溝182が形成された下部ブロック片181が設けられている。さらに下部ブロック片181の上部には、前記被検出板166の後部を差し込んで固定する差込凹部183が形成された中間ブロック片184が設けられている。
【0067】
前部連結部材185は、図9,図14(a)に示すように、連結板186を有する。連結板186の上部には、前記一対の軸部材171,172の前部を差し込んで固定する差込管187,188が設けられている。また、連結板186の下部には、前記ガイド軸173の前部を差し込んで固定する差込溝196と、前記被検出板166の前部を差し込んで固定する差込凹部197が形成されたブロック片190が設けられている。なお、前部連結部材185の前部、即ち連結板186の前面には、取付板210が固定して取り付けられている。
【0068】
図12,13を参照して前述したように、左側に位置する前記軸部材171は、前壁152及び後壁153の左側に配置されたガイド筒162,162によって軸方向に摺動可能に保持され、右側に位置する軸部材172は、前壁152及び後壁153の右側に配置されたガイド筒161,161によって軸方向に摺動可能に保持されている。また、図10に示すように、ガイド軸173は、前記ガイド部材141のガイド凹部142に差し込まれ、ガイド軸173のガイド溝173a,173aがガイド凹部142のガイド突起143,143に案内され、ガイド部材141によって軸方向に摺動可能に保持されている。
【0069】
また、被検出板166は、仕切壁131の上面132に固定された前記枠部材135内に挿通されている。被検出板166の上面には、前記第2のフォトセンサ(第2の検出手段)136によって被検出板166の長手方向の移動(摺動)距離Nが検出される微細な凹凸が長手方向に向かって所定間隔あけて連続形成されている。この第2のフォトセンサ(第2の検出手段)136と被検出板166で水平リニアエンコーダ242を構成する。
【0070】
図13に示すように、前記移送手段150の天壁157の挿通孔163と底壁156の軸受孔165に駆動軸191が回動可能に設けられている。駆動軸191には、前記左側に位置する軸部材171のラック174と噛み合う歯車192が形成されている。また、駆動軸191は、天壁157から上方に突出しており、この突出部193に円盤状のハンドル195が固定されている。
【0071】
図9に示すように、アーム部材170の先端には、摺接部材200が設けられている。摺接部材200は、弾性部材によって載置面3側に付勢された接触子201を有する。摺接部材200内には、接触子201の軸方向(上下方向)の移動距離Mを検出する第3のフォトセンサ等の第3の検出手段220が設けられている。この第3のフォトセンサ220と接触子201とで垂直リニアエンコーダ243を構成する。
【0072】
この摺接部材200は、装着部材205に取り付けられている。図15に示すように、装着部材205は、略L字状に形成され、縦保持部材206と、縦保持部材206の前面側下端に一体的に設けられた横保持部材207とからなる。横保持部材207には、上下方向(載置面3と略直角の方向)に向かって形成された取付孔が形成され、当該取付孔に摺接部材200が固定して取り付けられる。また、横保持部材207には、接触子201を照らす発光装置203が設けられている。
【0073】
前記取付板210の前面右側には、上下方向に向かって伸びるガイドレール211が設けられている。ガイドレール211は、矩形軸状に形成され、両側にガイド溝212が形成されている。前記縦保持部材206の背面側には、前記取付板210のガイドレール211にそって上下方向に案内される摺動体215が設けられている。摺動体215には、前記ガイドレール211を挿通するガイド凹部216と、ガイドレール211のガイド溝212に摺動可能に係合するガイド突起217が形成されている。従って装着部材205は、ガイドレール211に沿って上下方向に移動可能な構成となっている。
【0074】
前記取付板210の左側には、上下方向に向かって伸びるスライド溝221が形成され、スライド溝221に沿って上下方向にスライド可能な略L字状のストッパー片222が設けられている。ストッパー片222は、位置調節部材225によって取付板210の所定位置に固定される。位置調節部材225は、スライド溝221を挿通するネジ部229と、調節ハンドル部227とを有し、当該ネジ部229をストッパー片222にねじ込むことにより、ストッパー片222を取付板210に固定し、当該ネジ部229をストッパー片222から緩めることにより、ストッパー片222を取付板210に対して摺動可能となる。
【0075】
前記装着部材205の縦保持部材206には、右方に向かって突出する突片208を有し、突片208の裏面209に微調節用ブロック204が固定して設けられている。ストッパー片222には、微調節用ネジ部材228が回動可能に設けられており、微調節用ネジ部材228のネジ部229が微調節用ブロック204に螺合している。微調節用ネジ部材228を一方に回すと、微調節用ブロック204、即ち、装着部材205が上昇し、微調節用ネジ部材228を他方に回すと、微調節用ブロック204、即ち、装着部材205が下降して、接触子201の高さ方向の微調節を行うことができる。なお、微調節用ブロック204には、微調節用ネジ部材228のネジ部229をロックするロックボルト223が設けられており、ロックボルト223を一方に回動するとネジ部229に圧接して微調節用ネジ部材228をロックし、ロックボルト223を他方に回動するとネジ部229から外れて微調節用ネジ部材228のロックを解除する。
【0076】
図16に示すように、アーム部材170には、カバー部材230が取り付けられている。カバー部材230は、断面コ字状に形成され、上板232と、上板232の両端に略直角に折曲された側板233とからなる。左側の側板233の前方には、開口231が形成されている。上板232の略中央には、長孔が形成されている。カバー部材230は、上板232を前部連結部材185及び後部連結部材175に図示しないネジ等で固定され、移送手段150及び旋回枠体110がカバーされる。移送手段150の駆動軸191は、上板232の長孔から上方に突出する。図19に示すように、開口231は、アーム部材170を後方に一番戻した初期位置でのみ、旋回枠体110に設けた電子基板126と対向して操作ボタン125を操作できる位置に形成されている。従って、アーム部材170が初期位置以外に移動している場合には、開口231が操作ボタン125から外れているため、操作ボタン125を操作することができない。
【0077】
前記旋回枠体110に設けられた電子基板126には、前記第1のフォトセンサ121、前記第2のフォトセンサ136、前記第3のフォトセンサ220、前記発光装置203が接続されている。基台2には、電子基板126に接続される表示手段66とを有する。表示手段66は表示部67を有し、表示部67に接触子201のX軸方向の移動位置(横方向の位置)Xと、接触子201のY軸方向の移動位置(縦方向の位置)Yと、接触子201のZ軸方向の移動位置(高さ方向の位置)Zと、接触子201の移動距離Lと、接触子201の傾斜角度θが表示される。
【0078】
電子基板126は、図22に示すように、演算手段251とRAM(記憶手段)252とを有し、演算手段251によって第1のフォトセンサ121からの信号によりアーム部材170の回動角度Pを算出する。同様に、演算手段251によって第2のフォトセンサ136からの信号によりアーム部材170の移動距離Nを算出する。演算手段251によってアーム部材170の回動角度Pと移動距離Nから、接触子201のX軸方向の移動位置XとY軸方向の移動位置Yを算出し、表示手段66の表示部67に接触子201の移動位置X,Yを表示する。演算手段251によって第3のフォトセンサ220からの信号により接触子201のZ軸方向の移動位置Zを算出し、表示手段66の表示部67に接触子201の移動位置Zを表示する。電子基板126は、前記移動位置X、Y、Z、移動距離N、回動角度PのデータをRAM(記憶手段)252に記憶させることが出来る。なお、電子基板126の操作ボタン125には、RAM(記憶手段)252に記憶させたデータを消去(リセット)して、表示部67の表示を全て0にするリセットボタン、移動位置の数値を再入力する入力ボタン等が含まれている。
【0079】
測定装置101は、以下のように使用することができる。測定装置101は、電磁石107のスイッチ107aをオフにしておくことにより、磁力が発生していないので容易に持ち運ぶことができる。測定装置101は、強磁性体で形成された基台2上に載置し、電磁石107のスイッチ107aをオンにすることにより、磁力が発生し、基台2に強固にされる。ハンドル195を回転すると、駆動軸191を介して歯車192が回転し、この歯車192と噛み合うラック174により軸部材171が軸方向に移動する。軸部材171は、アーム部材170の一部を構成しているので、アーム部材170全体が軸方向(前後方向)に移送される。
【0080】
アーム部材170は、図18,19に示すように、一番引っ込めた位置(初期位置)から、図20,21に示すように、一番突出させた位置(最終位置)まで、ハンドル195の回転により移送することができる。図19に示すように、測定装置101は、初期位置でのみ、カバー部材230の開口231が電子基板126の操作ボタン125に位置するので開口231から操作ボタン125を操作することができる。しかし、図21に示すように、測定装置101は、初期位置から外れると、操作ボタン125がカバー部材230に覆われるので操作することができなくなる。従って、測定装置101は、操作ミスを軽減することができる構造となっている。
【0081】
測定装置101は、基台2の載置面3に被測定物Aを載置する。測定装置101は、接触子201の高さを調節することができる。調節ハンドル部227を一方に回して、位置調節部材225のネジ部226を緩めることにより、ストッパー片222が取付板210から離れ、装着部材205がガイドレール211に沿って上下方向に摺動可能になり、図17に示すように、接触子201の高さを設定することができる。この設定後に、調節ハンドル部227を他方に回して、位置調節部材225のネジ部226をストッパー片222にねじ込むことにより、ストッパー片222が取付板210に固定され、接触子201の高さが固定される。なお、接触子201の高さは、さらに微調節することができる。
【0082】
ロックボルト223を他方に回動すると微調節用ネジ部材228のネジ部229から外れて微調節用ネジ部材228のロックを解除され、微調節用ネジ部材228を回動することができる。微調節用ネジ部材228を一方に回すと装着部材205が上昇し、微調節用ネジ部材228を他方に回すと装着部材205が下降するので、接触子201の高さの微調節を行うことができる。微調節後、ロックボルト223を一方に回動すると微調節用ネジ部材228のネジ部229に圧接して微調節用ネジ部材228を回動不能にロックする。
【0083】
操作ボタン125のオン・オフスイッチをオンにすると発光装置203が発光して接触子201を照らす。被測定物Aの一点(基準点)に接触子201を接触させ、操作ボタン125のリセットボタンを押して表示手段66の表示部67の数値を0にする。この数値が0となった点が原点となる。接触子201を被測定物Aの任意の位置に接触させる。原点から任意の位置までの接触子201の上下方向の移動距離Mは、第3のフォトセンサ220によって検出され、この検出されたデータに基づいて演算手段251によってZ方向(高さ方向)の位置Zが算出される。この算出されたZ方向の位置データは、表示手段66の表示部67に表示され、同時にRAM(記憶手段)252に記憶されていく。
【0084】
アーム部材170の長手方向の移動は、移送手段150のハンドル195の回転により行うことができ、接触子201を正確且つ確実に所定の位置に移動させることができ、しかも操作者の所望する繊細な動きをさせることができる。接触子201の原点から任意の位置までの移動に伴って、アーム部材170が回動しながら長手方向に移動する。アーム部材170の回動は、前述したように、第1のフォトセンサ121によって検出され、この検出されたデータに基づいて演算手段251によってアーム部材170の回動角度Pが算出される。この算出されたアーム部材170の回動角度Pは、RAM(記憶手段)252に記憶されていく。アーム部材170の長手方向の移動距離Nは、第2のフォトセンサ136によって検出され、この検出されたデータに基づいて演算手段251によって算出される。この算出されたアーム部材170の移動距離Nは、RAM(記憶手段)252に記憶されていく。
【0085】
また、演算手段251は、アーム部材170の移動距離Nと回動角度Pに基づいて接触子201のX方向(横方向)の位置XとY方向(縦方向)の位置Yを算出する。この算出したX方向とY方向の位置データは、表示手段66の表示部67に表示され、同時にRAM(記憶手段)252に記憶されていく。演算手段251は、接触子201の位置X、Y、Zに基づいて、原点から接触子201までの移動距離Lを算出する。電子基板126は、この算出した移動距離Lを表示手段66の表示部67に表示する。また、演算手段251は、接触子201の位置X、Y、Zに基づいて、原点と接触子201を結ぶ線と載置面3との傾斜角θを算出する。電子基板126は、この算出した傾斜角θを表示手段66の表示部67に表示する。前記した移動距離Lのデータと傾斜角θのデータは、RAM(記憶手段)252に記憶される。
【0086】
このように、測定装置101は、任意の位置を原点として、測定位置のX方向(横方向)の位置X、Y方向(縦方向)の位置Y、Z方向(高さ方向)の位置Z、任意の位置から測定位置まで距離L、任意の位置と測定位置を結ぶ線の載置面3に対する傾斜角θを瞬時に算出して、表示手段66の表示部67に表示する。従って、測定装置101は、ノギス等の測定工具よりも簡単に被測定物Aの寸法を測定することが可能である。例えば、図1に示すように、被測定物Aの任意の位置A1に接触子201を接触させ、リセットボタンを押して、表示手段66の表示部67を全て0にする。次に、被測定物Aの任意の位置A2に接触子201を接触させると、表示手段66の表示部67に、任意の位置A2のX方向の位置X、Y方向の位置Y、Z方向の位置Zと、任意の位置A1からA2まで距離L、任意の位置A1とA2を結ぶ線の傾斜角θを瞬時に算出して、表示手段66の表示部67に表示する。上記距離Lが被測定物Aの寸法となる。このようにして、被測定物Aの縦方向、横方向、高さ方向の寸法を迅速且つ簡易に測定することができ、その測定結果が瞬時に表示手段66に表示されるので、一目で寸法を確認することができる。また、測定結果は、RAM(記憶手段)252に記憶されるので、測定結果のデータを管理することができ、電子基板126にプリンタ、プロッタ等の印刷装置69を接続することによって、被測定物Aを図面化することができる。
【0087】
測定装置101は、モータ等の駆動手段を備えておらず、すべて手動で行うため、軽量化、小型化、低コスト化を図ることができる。測定者は、アーム部材170の先端に設けられた接触子201を把持して測定を行うが、接触子201と共にアーム部材170も移動してアーム部材170が測定者側に突出することがないので、アーム部材170が測定のじゃまにならない。また、測定装置101は、従来の測定装置のようにX軸方向又はY軸方向に直線的に移動させながら測定するだけではなく、任意の位置と任意の位置の間の距離と角度を迅速且つ簡易に測定することができ、被測定物Aの外観形状に合わせて柔軟な測定を行うことできる。
【0088】
上記実施の形態では、被測定物Aの任意の位置A1を原点としたが、電子基板126によって原点を最初から設定しておいても構わない。このように設定すると、接触子201を任意の箇所A1に接触させると、演算手段251がその接触位置A1の位置(X1,Y1,Z1)を算出する。次に接触子201を任意の箇所A2に接触させると、演算手段251がその接触位置A2の位置(X2,Y2,Z2)を算出する。さらに演算手段251がA1の位置とA2の位置関係から、任意の位置A1とA2の距離L及び傾斜角θを演算する。このようにして被測定物Aの寸法を測定するようにしても構わない。
【0089】
測定装置101は、従来の簡易な測定手段であるノギスと同様に、フレキシブルで迅速な測定を行うことができる一方、その測定結果が表示手段66に表示され一目でその測定結果を視認することができる。従って、測定装置101は、従来の高度な三次元測定装置と比べて、多品種少量の生産物の測定に有効に活用することができる。また、測定装置101は、部品点数が少なく構造が簡易化されているので、安価に製造することができ、従来の高度な三次元測定装置と比べて、設置の負担が少なくてすみ、中小企業にとっても利用しやすいものになっている。
【産業上の利用可能性】
【0090】
本願発明に係る測定装置は、製造物、加工物等の物品の任意部分の寸法を測定する装置として利用可能である。
【符号の説明】
【0091】
A 被測定物
A1 任意の位置(箇所、接触点、原点)
A2 任意の位置(箇所、接触点)
B 被測定物
B1 側面凹部
X 移動位置(横方向の位置)
Y 移動位置(縦方向の位置)
Z 移動位置(高さ方向の位置)
L 移動距離(被測定物の長さ)
M 移動距離
N 移動距離
P 回転量(回動角度)
θ 傾斜角(角度)
1 測定装置
2 基台
3 載置面
3a 端縁(上端縁)
5 取付枠
6 上板
7 脚板
8 固定板
10 回動体
11 上面
12 下面
13 前面
14 後面
15 左面
16 右面
17 凹部
19 回転軸
20 円板
20a 一方の面(下面)
21 第1のフォトセンサ(第1の検出手段)
22 ブロック片
25 支持板
26 下面
30 ガイド部材
31 ガイド凹部
32 ガイド突起
35 アーム部材
36 ガイド溝
38 一方の面(下面)
39 第2のフォトセンサ(第2の検出手段)
40 摺接部材
41 筒部材
42 測定軸
43 バネ部材(弾性部材)
44 他端
45 接触子
45a 接触子
46 センサケース
47 フランジ
49 第3のフォトセンサ(第3の検出手段)
51 装着部材
52 上部装着部
53 下部装着部
54 取付板
55 縦保持部材
56 横保持部材
57 取付孔
58 割溝
59 ネジ
60 制御手段
61 演算手段
62 RAM(記憶手段)
63 ロータリーエンコーダ
64 水平リニアエンコーダ
65 垂直リニアエンコーダ
66 表示手段
67 表示部
68 操作ボタン
69 印刷装置
101 測定装置
102 装置本体
103 取付台
105 取付板
106 下面
107 電磁石
107a スイッチ
108 上面
109 回転台
110 旋回枠体
111 下枠体
112 上枠体
113 下壁
115 下左側壁
116 下右側壁
117 中間壁
119 支軸
121 第1の検出手段(第1のフォトセンサ)
122 ケース
125 操作ボタン
126 電子基板
128 上左側壁
129 上右側壁
130 上壁
131 仕切壁
132 上面
133 下面
135 枠部材
136 第2の検出手段(第2のフォトセンサ)
139 ブロック
141 ガイド部材
142 ガイド凹部
143 ガイド突起
150 移送手段
151 枠部材
152 前壁
153 後壁
154 左壁
155 右壁
156 底壁
157 天壁
161 ガイド筒
162 ガイド筒
163 挿通孔
165 軸受孔
166 被検出板
170 アーム部材
171 軸部材
172 軸部材
173 ガイド軸
173a ガイド溝
174 ラック
175 後部連結部材
176 連結板
177 差込穴
178 差込穴
179 上部ブロック片
181 下部ブロック片
182 差込溝
183 差込凹部
184 中間ブロック片
185 前部連結部材
186 連結板
187 差込管
188 差込管
190 ブロック片
191 駆動軸
192 歯車
193 突出部
195 ハンドル
196 差込溝
197 差込凹部
200 摺接部材
201 接触子
203 発光装置
204 微調節用ブロック
205 装着部材(スライド部材)
206 縦保持部材
207 横保持部材
208 突片
209 裏面
210 取付板
211 ガイドレール
212 ガイド溝
215 摺動体
216 ガイド凹部
217 ガイド突起
220 第3の検出手段(第3のフォトセンサ)
221 スライド溝
222 ストッパー片
223 ロックボルト
225 位置調節部材(固定手段)
226 ネジ部
227 調節ハンドル部
228 微調節用ネジ部材
229 ネジ部
230 カバー部材
231 開口
241 ロータリーエンコーダ
242 水平リニアエンコーダ
243 垂直リニアエンコーダ
251 演算手段
252 RAM(記憶手段)
【特許請求の範囲】
【請求項1】
被測定物の寸法を測定する測定装置であって、
被測定物を載置する載置面を備えた基台上に取り付けられる装置本体を有し、
装置本体は、
基台上に固定して取り付けられる取付台と、
前記取付台に前記基台の載置面と略平行の面方向に回動可能に取り付けられた旋回枠体とを備え、
前記旋回枠体には、
前記基台の載置面と略平行の面方向で且つ長手方向に摺動可能となるアーム部材と、
前記アーム部材を長手方向に送る移送手段とが設けられ、
前記アーム部材の先部には、
前記基台の載置面と略直角の方向に移動可能となるようにして接触子が取り付けられており、
前記取付台又は前記旋回枠体には、前記アーム部材の回動角度を検出する第1の検出手段が設けられ、
前記旋回枠体には、前記アーム部材の長手方向の移動距離を検出する第2の検出手段が設けられ、
前記アーム部材には、前記接触子の移動距離を検出する第3の検出手段が設けられていることを特徴とする測定装置。
【請求項2】
前記アーム部材は、一対の軸部材を有し、
前記移送手段は、一対の軸部材の一方に形成されたラックと噛み合う歯車と、歯車を強制的に回転させる回転ハンドルとからなることを特徴とする請求項1記載の測定装置。
【請求項3】
前記接触子は、スライド部材に取り付けられており、
前記スライド部材は、アーム部材に上下方向にスライド可能に取り付けられ、かつ所定位置で固定手段によりアーム部材に固定することができるように構成されていることを特徴とする請求項1又は2記載の測定装置。
【請求項4】
被測定物の任意の箇所を原点として、当該原点から接触子の接触点の位置を算出する演算手段を有し、
演算手段は、前記第1の検出手段によって検出されたアーム部材の回動角度と、前記第2の検出手段によって検出されたアーム部材の長手方向の移動距離を演算して接触子の接触点の縦方向と横方向の位置を算出すると共に、前記第3の検出手段によって検出された接触子の移動距離を演算して接触子の接触点の高さ方向の位置を算出することを特徴とする請求項1、2又は3記載の測定装置。
【請求項5】
前記演算手段は、前記算出結果に基づいて、さらに原点から接触子の接触点までの距離と載置面に対する角度を算出することを特徴とする請求項4記載の測定装置。
【請求項6】
前記演算手段及び演算手段のオン及びオフを行う操作ボタンが前記取付台又は前記旋回枠体に設けられていることを特徴とする請求項4又は5記載の想定装置。
【請求項7】
前記アーム部材には、アーム部材、旋回枠体及び取付台をカバーするカバー部材が設けられ、
当該カバー部材は、アーム部材と共に移動可能であり、アーム部材の旋回枠体及び取付台に対する所定位置において、前記操作ボタンを操作することができる開口が形成されていることを特徴とする請求項6記載の測定装置。
【請求項8】
前記演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置を表示する表示手段が設けられていることを特徴とする請求項4乃至7のいずれか1項に記載の測定装置。
【請求項9】
前記演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置及び原点から接触点までの距離並びに載置面に対する角度を表示する表示手段が設けられていることを特徴とする請求項4乃至7のいずれか1項に記載の測定装置。
【請求項10】
前記演算手段によって算出された算出結果を記憶する記憶手段が設けられていることを特徴とする請求項4乃至9のいずれか1項に記載の測定装置。
【請求項1】
被測定物の寸法を測定する測定装置であって、
被測定物を載置する載置面を備えた基台上に取り付けられる装置本体を有し、
装置本体は、
基台上に固定して取り付けられる取付台と、
前記取付台に前記基台の載置面と略平行の面方向に回動可能に取り付けられた旋回枠体とを備え、
前記旋回枠体には、
前記基台の載置面と略平行の面方向で且つ長手方向に摺動可能となるアーム部材と、
前記アーム部材を長手方向に送る移送手段とが設けられ、
前記アーム部材の先部には、
前記基台の載置面と略直角の方向に移動可能となるようにして接触子が取り付けられており、
前記取付台又は前記旋回枠体には、前記アーム部材の回動角度を検出する第1の検出手段が設けられ、
前記旋回枠体には、前記アーム部材の長手方向の移動距離を検出する第2の検出手段が設けられ、
前記アーム部材には、前記接触子の移動距離を検出する第3の検出手段が設けられていることを特徴とする測定装置。
【請求項2】
前記アーム部材は、一対の軸部材を有し、
前記移送手段は、一対の軸部材の一方に形成されたラックと噛み合う歯車と、歯車を強制的に回転させる回転ハンドルとからなることを特徴とする請求項1記載の測定装置。
【請求項3】
前記接触子は、スライド部材に取り付けられており、
前記スライド部材は、アーム部材に上下方向にスライド可能に取り付けられ、かつ所定位置で固定手段によりアーム部材に固定することができるように構成されていることを特徴とする請求項1又は2記載の測定装置。
【請求項4】
被測定物の任意の箇所を原点として、当該原点から接触子の接触点の位置を算出する演算手段を有し、
演算手段は、前記第1の検出手段によって検出されたアーム部材の回動角度と、前記第2の検出手段によって検出されたアーム部材の長手方向の移動距離を演算して接触子の接触点の縦方向と横方向の位置を算出すると共に、前記第3の検出手段によって検出された接触子の移動距離を演算して接触子の接触点の高さ方向の位置を算出することを特徴とする請求項1、2又は3記載の測定装置。
【請求項5】
前記演算手段は、前記算出結果に基づいて、さらに原点から接触子の接触点までの距離と載置面に対する角度を算出することを特徴とする請求項4記載の測定装置。
【請求項6】
前記演算手段及び演算手段のオン及びオフを行う操作ボタンが前記取付台又は前記旋回枠体に設けられていることを特徴とする請求項4又は5記載の想定装置。
【請求項7】
前記アーム部材には、アーム部材、旋回枠体及び取付台をカバーするカバー部材が設けられ、
当該カバー部材は、アーム部材と共に移動可能であり、アーム部材の旋回枠体及び取付台に対する所定位置において、前記操作ボタンを操作することができる開口が形成されていることを特徴とする請求項6記載の測定装置。
【請求項8】
前記演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置を表示する表示手段が設けられていることを特徴とする請求項4乃至7のいずれか1項に記載の測定装置。
【請求項9】
前記演算手段によって算出された接触子の接触点の縦方向、横方向、高さ方向の位置及び原点から接触点までの距離並びに載置面に対する角度を表示する表示手段が設けられていることを特徴とする請求項4乃至7のいずれか1項に記載の測定装置。
【請求項10】
前記演算手段によって算出された算出結果を記憶する記憶手段が設けられていることを特徴とする請求項4乃至9のいずれか1項に記載の測定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【公開番号】特開2011−94989(P2011−94989A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−246431(P2009−246431)
【出願日】平成21年10月27日(2009.10.27)
【出願人】(505290829)株式会社ミドリ安全縫技研究所 (15)
【出願人】(391009372)ミドリ安全株式会社 (201)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月27日(2009.10.27)
【出願人】(505290829)株式会社ミドリ安全縫技研究所 (15)
【出願人】(391009372)ミドリ安全株式会社 (201)
【Fターム(参考)】
[ Back to top ]