
測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダ
【課題】装置規模が小さくマルチパス波の干渉下でも所望波の到来角を正確に推定する測角装置を得る。
【解決手段】測角装置は、複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定する。
【解決手段】測角装置は、複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、レーダに到来する電波の到来角を推定する測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダに関するものである。
【背景技術】
【0002】
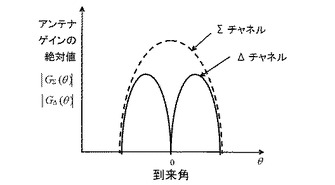
レーダに到来する電波の到来角を高い精度で図る方法として、モノパルス測角装置がよく知られており、モノパルスアンテナ、差分信号と合成信号を出力する合成分配器、受信機、A/D変換器、モノパルス演算手段、送信源、送信機を備える。従来のモノパルス測角方式では、例えば指向方向が僅かに異なる2つのアンテナビームの差分信号であるΔチャネルの受信信号νΔを、合成信号であるΣチャネルの受信信号νΣで規格化した値(νΔ/νΣ)を観測することにより、電波到来方向のアンテナ中心からの角度偏差、すなわち到来角を高精度に知るものである。モノパルスアンテナのΔチャネル、Σチャネルの複素アンテナゲインパターンをそれぞれ、GΔ(θ)、GΣ(θ)とすれば、これらの振幅パターンは、GΔ(θ)がアンテナ正面方向に鋭いナルを有するように設計されることが多い。
送信信号s(t)が目標から反射してwds(t−τd)となって角度θdから到来する場合、(νΔ/νΣ)は式(1)で表される。ここにwdは反射波の振幅減衰と位相変動を示す複素定数、τdは遅延時間である。
【0003】
【数1】

【0004】
各角度θとGΔ(θ)/GΣ(θ)の関係は予め知って置くことができるため、(νΔ/νΣ)の値を読み取ればそれに対応する到来角θdを精密に推定することができる(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】吉田孝編、「レーダ技術」、初版、社団法人電子情報通信学会、平成8年10月、p.227−232
【発明の概要】
【発明が解決しようとする課題】
【0006】
レーダを使用する環境では目標反射波のほかに海面や地面や他の目標などの周囲の反射点を経由するマルチパス波も到来することが少なくない。直接波とは異なる方向θj、異なる到来時刻τjに到来するマルチパス波wjs(t−τj)が干渉すると、信号値(νΔ/νΣ)にマルチパス波wjs(t−τj)の寄与が加わるため、式(1)が成立せず、直接波の到来角推定精度が劣化する。
【0007】
マルチパス波の到来角θjがアンテナビーム外になるように、アンテナビームの角度幅を絞ることによりマルチパス波による角度推定誤差を低減することも考えられる。
しかしながら、アンテナビームを絞るにはアンテナ開口幅を拡大する必要があり、装置規模が増大してしまう。特に、航空機や自動車へ搭載する場合には搭載スペースの制約から困難であることが多い。
【0008】
一方、モノパルスアンテナに換えて、素子アンテナをアレー状に並べ、それぞれの素子アンテナ受信信号の相関行列を超分解能型測角演算手段に入力し、アンテナビーム内に混信して到来する複数の電波の到来角をそれぞれ推定する方法もある。この同時測角演算は、参考文献1(菊間信良著、「アレーアンテナによる適応信号処理」、科学技術出版社、1998年11月)に開示されている超分解能アルゴリズム、例えばMUSIC法やESPRITによるものである。
このような超分解能型測角法を用いれば、マルチパス波と分離して直接波の到来角を比較的正確に推定できるが、多数の素子アンテナ、受信機等を必要とするため、装置規模、重量、コストが増大する。また、マルチパス波と直接波が近接した角度から入射すると測角精度、分解能が低下する。
【0009】
この発明は、このような課題を解決するためになされたものであり、装置規模が小さくマルチパス波の干渉下でも所望波の到来角を正確に推定する測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダを得ることを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る測角装置は、複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定する。
【発明の効果】
【0011】
この発明に係る測角装置によれば、モノパルスアンテナのΣチャネル受信信号とΔチャネル受信信号とをそれぞれ周波数スペクトルに分解し、Σチャネル受信信号の周波数スペクトルから各到来波の遅延時間を超分解能アルゴリズムで正確に推定し、各到来波が混合する係数行列を推定し、各到来波が混合する係数行列を共通に用いて、Σチャネル、Δチャネルに含まれる所望波(直接波)の成分を逆推定することにより分離抽出し、それぞれの所望波(直接波)の成分を用いてモノパルス測角するので、マルチパス波など不要な干渉が存在しても所望波(直接波)の到来角を正確に推定することができることである。
【図面の簡単な説明】
【0012】
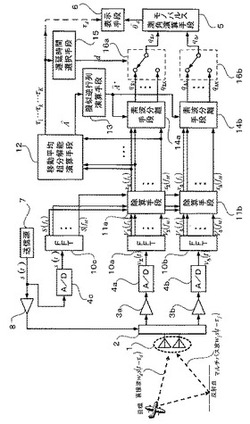
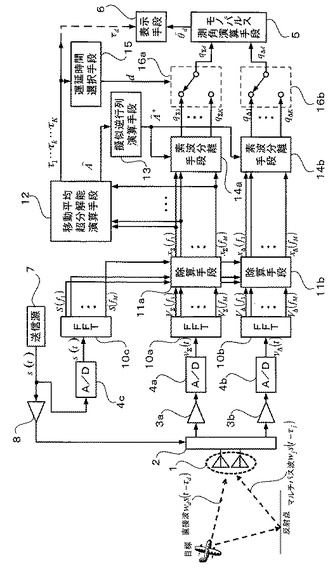
【図1】この発明の実施の形態1に係るレ−ダ測角装置のブロック構成図である。
【図2】モノパルスアンテナの振幅ゲインを示す図である。
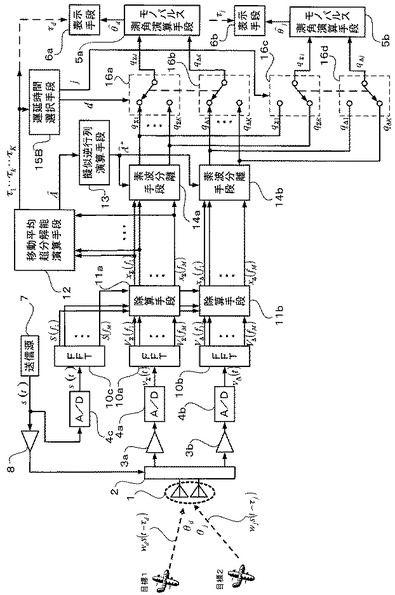
【図3】この発明の実施の形態2に係るレ−ダ測角装置のブロック構成図である。
【図4】この発明の実施の形態3に係るマルチスタティックレ−ダの測角装置のブロック構成図である。
【図5】この発明の実施の形態4に係るマルチスタティックレ−ダの測角装置のブロック構成図である。
【発明を実施するための形態】
【0013】
実施の形態1.
以下、図を用いてこの発明の実施の形態に係るレーダ測角装置について説明する。
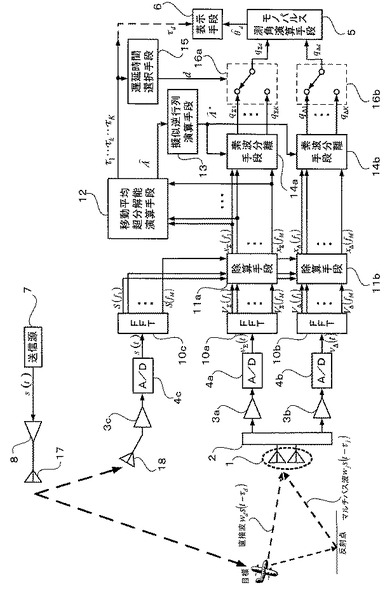
図1は、この発明の実施の形態1に係るレーダ測角装置のブロック構成図である。
この発明の実施の形態1に係るレーダ測角装置は、モノパルスアンテナ1を用いたモノパルス測角装置であり、モノパルスアンテナ1、合成/分配器2、受信機3a、3b、A/D変換器4a、4b、モノパルス測角演算手段5、表示手段6、送信源7、送信機8、FFT手段10a、10b、10c、除算手段11a、11b、移動平均超分解能演算手段12、擬似逆行列演算手段13、素波分離手段14a、14b、遅延時間選択手段15、選択手段16a、16bを有する。
【0014】
送信源7で生成された送信信号s(t)は、モノパルスアンテナ1から放射され、目標反射波の直接波wds(t−τd)とともに単数もしくは複数のマルチパス波wjs(t−τj)が(直接波も)合わせてK波モノパルスアンテナに到来するものとする。K波それぞれの到来角をθ1、θ2、・・・、θK、遅延時間をτ1、τ2、・・・、τKとする。
合成/分配器2のΣポートから、受信機3a、A/D変換器4aを経てΣチャネル受信信号νΣが第1のFFT(高速フーリエ変換)手段10aに入力される。
Σチャネル受信信号νΣは第1のFFT(高速フーリエ変換)手段10aにより周波数変換され、Σチャネル周波数スペクトルVΣ(f1)、VΣ(f2)、・・・、VΣ(fM)で出力される。
【0015】
ここに、f1、f2、・・・、fMは同じにして、合成/分配器2のΔポートから受信機3b、A/D変換器4bを経てΔチャネル受信信号νΔが第2のFFT(高速フーリエ変換)手段10bに入力される。Δチャネル受信信号νΔは、第2のFFT(高速フーリエ変換)手段10bにより変換され、Δチャネル周波数スペクトルVΔ(f1)、VΔ(f2)、・・・、VΔ(fM)で出力される。
【0016】
一方、送信源7からフィードされた送信信号s(t)は、A/D変換器4cを経て、第3のFFT(高速フーリエ変換)手段10cにより周波数変換され、送信信号周波数スペクトルS(f1)、S(f2)、・・・、S(fM)で出力される。
第1の除算手段11aは、Σチャネル周波数スペクトルVΣ(f1)、VΣ(f2)、・・・、VΣ(fM)をそれぞれ送信信号周波数スペクトルS(f1)、S(f2)、・・・、S(fM)により規格化し、式(2)のΣチャネル規格化スペクトルxΣを算出する。
【0017】
【数2】
【0018】
同様に、第2の除算手段11bは、Δチャネル周波数スペクトルVΔ(f1)、VΔ(f2)、・・・、VΔ(fM)をそれぞれ送信信号周波数スペクトルS(f1)、S(f2)、・・・、S(fM)により規格化し、式(3)のΔチャネル規格化スペクトルxΔを算出する。
【0019】
【数3】
【0020】
移動平均超分解能演算手段12は、Σチャネル規格化スペクトルxΣ(f1)、xΣ(f2)、・・・、xΣ(fM)を入力し、式(4)のΣチャネル相関行列RΣを、参考文献1の第13章に示されているような移動平均型超分解能アルゴリズムによる遅延時間推定法で処理し、到来するK波それぞれの遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kを算出する。ここに、E[*]は統計平均を意味し、実際には時間サンプルの平均で代用されることが多い。また、Hは共役転置を意味する。
【0021】
【数4】
【0022】
また、移動平均超分解能演算手段12は、推定した遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kを用いて、式(5)の係数行列A(ハット)を算出する。
【0023】
【数5】
【0024】
擬似逆行列演算手段13は、式(5)の係数行列A(ハット)の擬似逆行列A(ハット)+を式(6)に従って算出する。
【0025】
【数6】
【0026】
第1の素波分離手段14aは、第1の除算手段11aから出力されるΣチャネル規格化スペクトルxΣ(f1)、xΣ(f2)、・・・、xΣ(fM)に擬似逆行列A(ハット)+を用いて、式(7)のqΣ1、・・・、qΣk、・・・、qΣKを演算する。なお、kは1からKの整数である。
【0027】
【数7】
【0028】
第2の素波分離手段14bは、第2の除算手段11bから出力されるΔチャネル規格化スペクトルxΔ(f1)、xΔ(f2)、・・・、xΔ(fM)に擬似逆行列A(ハット)+を用いて、式(8)のqΔ1、・・・、qΔk、・・・、qΔKを演算する。
【0029】
【数8】
【0030】
遅延時間選択手段15は、移動平均超分解能演算手段12が推定した遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kの中から、所望波である直接波の遅延時間τ(ハット)dを選択し、その指数dを出力する。
なお、直接波はマルチパス波に比べて最も早く到来するため、遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kが最小となるものの指数を指数dとして決定することもできる。
【0031】
第1の選択手段16aは、第1の素波分離手段14aが演算したqΣ1、・・・、qΣk、・・・、qΣKの中から遅延時間選択手段15が指定する指数d番目のqΣdを選んで、モノパルス測角演算手段5に出力する。
第2の選択手段16bも連動して、第2の素波分離手段14bが演算したqΔ1、・・・、qΔk、・・・、qΔKの中から同じく遅延時間選択手段15が指定する指数d番目のqΔdを選んで、モノパルス測角演算手段5に出力する。
【0032】
モノパルス測角演算手段5は、qΣdとqΔdを入力し、(qΔd/qΣd)がテーブルGΔ(θ)/GΣ(θ)の値に一致する角度θを選び、これを所望波である直接波の到来角度θ(ハット)dとして表示手段6に出力する。すなわち、θ(ハット)dは式(9)を満たす角度として推定される。
【0033】
【数9】
【0034】
次に、この発明の実施の形態1に係るレーダ測角装置で採用した原理を説明する。
送信信号s(t)は、直接波wds(t−τd)とともに複数のマルチパス波wjs(t−τj)の合成波であるから、モノパルスアンテナ1のΣチャネルの受信信号νΣはノイズを無視すれば、式(10)のように表現できる。
【0035】
【数10】
【0036】
これをフーリエ変換して得たΣチャネル周波数スペクトルVΣ(f1)、VΣ(f2)、・・・、VΣ(fM)は式(11)のように表現できる。
【0037】
【数11】
【0038】
従って、式(2)で定義されるΣチャネル規格化スペクトルxΣ=[xΣ(f1),xΣ(f2),・・・,xΣ(fM)]Tは、式(12)のように表現できることになる。Tは転置を意味する。ここで係数行列Aは式(13)で、ベクトルqΣは式(14)で表される。
【0039】
【数12】
【0040】
ここで、式(14)のベクトルqΣの第k成分wkGΣ(θk)は、第k到来波の寄与(素波の成分)である。これは式(12)の最小二乗解として式(15)のようにΣチャネル規格化スペクトルから推定できる。従って、ベクトルqΣは式(12)の最小二乗解としてΣチャネル規格化スペクトルxΣ=[xΣ(f1),xΣ(f2),・・・,xΣ(fM)]Tと式(13)の係数行列Aから式(15)のように推定できる。なお、係数行列Aの擬似逆行列A+は式(16)から求められる。
【0041】
【数13】
【0042】
一方、式(10)と同様に、モノパルスアンテナ1のΔチャネルの受信信号νΔは式(17)と表すことができる。
【0043】
【数14】
【0044】
これをフーリエ変換したΔチャネル周波数スペクトルVΔ(f1)、VΔ(f2)、・・・、VΔ(fM)は式(11)と同様に式(18)のように表現できる。
【0045】
【数15】
【0046】
従って、式(3)で定義されるΔチャネル規格化スペクトルxΔは式(19)、式(20)で表現できることになる。
【0047】
【数16】
【0048】
式(20)に示されるベクトルqΔの第k成分wkGΔ(θk)は第k到来波のΔチャネルへの寄与(素波の成分)である。従って、ベクトルqΔは式(19)の最小二乗解としてΔチャネル規格化スペクトルxΔと式(13)の係数行列Aから式(21)のように推定できる。
【0049】
【数17】
【0050】
このように移動平均超分解能演算手段12は式(22)に示すように各到来波の遅延時間τ1、τ2、・・・、τKをほぼ正しく推定することができる。
【0051】
【数18】
【0052】
移動平均超分解能演算手段12が出力する係数行列A(ハット)と、擬似逆行列演算手段13が出力する擬似逆行列A(ハット)+は、それぞれ式(23)、式(24)と推定される。
【0053】
【数19】
【0054】
このとき、第1の素波分離手段14aは、第1の除算手段11aが出力するΣチャネル規格化スペクトルxΣと擬似逆行列演算手段13が出力する擬似逆行列A(ハット)+からベクトルqΣを式(15)のように推定できる。
同様に、第2の素波分離手段14bは、第2の除算手段11bが出力するΔチャネル規格化スペクトルxΔと擬似逆行列演算手段13が出力する擬似逆行列A(ハット)+からベクトルqΔを式(21)のように推定できる。
【0055】
さらに、遅延時間選択手段15が所望波である直接波の遅延時間τ(ハット)dを正しく選択すれば、第1の選択手段16aは、第1の素波分離手段14aが出力したqΣ1、・・・、qΣk、・・・、qΣKの要素の中から直接波の成分qΣdを選んでモノパルス測角演算手段5に出力する。
同時に、第2の選択手段16bは、第2の素波分離手段14bが出力したqΔ1、・・・、qΔk、・・・、qΔKの要素の中から直接波の成分qΔdを選んでモノパルス測角演算手段5に出力する。
【0056】
モノパルス測角演算手段5は成分qΣdと成分qΔdを入力し(qΔd/qΣd)を演算するが、式(15)と式(21)から式(25)の関係が成り立つことがわかる。
【0057】
【数20】
【0058】
このことは、(qΔd/qΣd)は、マルチパス波が到来せず所望波である直接波のみが単独に到来した場合に成立するモノパルス測角の原理式(1)である複素ゲインの比GΔ(θd)/GΣ(θd)と等価であることを意味する。
従って、モノパルス測角演算手段5が、(qΔd/qΣd)の値にテーブル値GΔ(θ)/GΣ(θ)が一致する角度θを選ぶことは、直接波のみが単独に到来した場合のモノパルス測角処理と等価であるから、マルチパス波のよる干渉の効果が抑圧できて、正確に直接波の到来角θdが推定される。
【0059】
上記実施の形態1では、移動平均超分解能演算手段12がΔチャネルではなくてΣチャネルの規格化スペクトルxΣ(f1)、xΣ(f2)、・・・、xΣ(fM)を入力して係数行列A(ハット)を算出するところにも特徴がある。
モノパルスアンテナによる測角では、一般にΣチャネルの受信電力が高く、Δチャネルの受信電力が0近くになるヌル、すなわち図2中のθ=0の近傍にアンテナを向けて観測することが多い。この場合、Σチャネルの高い受信電力すなわち高いSN比の信号で超分解能アルゴリズムによる遅延時間推定を実行するので、遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kの推定精度が高く、ひいては係数行列A(ハット)の擬似逆行列A(ハット)+を正確に推定することができるからである。
【0060】
以上まとめると、本発明の実施の形態1による構成では、モノパルスアンテナ1のΣチャネル受信信号とΔチャネル受信信号とをそれぞれ周波数スペクトルに分解し、Σチャネル受信信号の周波数スペクトルから各到来波の遅延時間を超分解能アルゴリズムで正確に推定し、各到来波が混合する係数行列を推定する。そして、この各到来波が混合する係数行列を共通に用いて、Σチャネル、Δチャネルに含まれる所望波(直接波)の成分を逆推定することにより分離抽出する。それぞれの所望波(直接波)の成分を用いてモノパルス測角するので、マルチパス波など不要な干渉が存在しても所望波(直接波)の到来角を正確に推定することができる。
【0061】
なお、上記実施の形態1での例の移動平均超分解能演算手段12が遅延時間を推定する際に用いる超分解能アルゴリズムとしては、参考文献1にも開示されているMUSIC法やESPRITなどが代表的であるが、最尤推定法による遅延時間推定でも同様な効果を奏する。この場合、相関行列RΣの要素の移動平均は必要ない。
また、移動平均超分解能演算手段12は、遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kを複数のサンプルから求めてそれぞれ平均化した遅延推定値を式(5)に代入して係数行列A(ハット)を算出してもよい。
【0062】
また、モノパルスアンテナ1と合成/分配器2がΣチャネル、水平角観測のためのΔazチャネル、仰角観測のためのΔelチャネルの3チャネル受信信号を出力する場合には、Δazチャネル、Δelチャネル共に、上記実施の形態1の例と同様に構成して、所望波の水平角、仰角を同時に推定することもできる。
【0063】
なお、上記実施の形態1の例で、表示手段6は、モノパルス測角演算手段5が出力する直接波の到来角θ(ハット)dに加え、遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kの中から遅延時間選択手段15が指定するd番目の遅延時間τ(ハット)dも合わせて入力し、遅延時間と到来角をペアで表示してもよい。この場合、モノパルスアンテナ1を基準とした相対的な目標位置が推定できる。
【0064】
また、モノパルス測角演算手段5が出力する直接波の到来角θ(ハット)dをモノパルスアンテナ1の駆動機構にフィードバックして、モノパルスアンテナ1の指向方向を目標に追尾するようにすることもできる。
【0065】
また、上記実施の形態1の例ではモノパルスアンテナ1のΣチャネルのスペクトルを移動平均超分解能演算手段12に入力するように構成しているが、Δチャネルの受信電力が小さくない場合、Δチャネルのスペクトルを移動平均超分解能演算手段12に入力するように構成することもできる。
【0066】
また、上記実施の形態1の例では、モノパルスアンテナ1に適用する構成としているが、モノパルスアンテナ1の代わりに2素子以上の素子アンテナを用いる場合にも適用できる。この場合、第1の素子アンテナに受信機3aを接続し、第2の素子アンテナに受信機3bを接続するように構成して、第1の素波分離手段14aが出力するqΣdと第2の素波分離手段14bが出力するqΔdとの位相差または振幅差または両方を用いて直接波の到来角を推定することができ、同様な効果を示すことができる。アレーアンテナを形成する複数の素子アンテナの受信信号を合成した信号を受信機3に接続するような構成もある。
【0067】
また、上記実施の形態1の例では、受信信号のスペクトルをFFT(高速フーリエ変換)手段10により周波数変換して求めているが、代りに一般のフーリエ変換演算やフィルタバンクによってスペクトルを求めるよう構成することもできる。
【0068】
なお、式(11)以下では簡単のため受信機ノイズを無視して説明したが、受信機ノイズが存在する場合でも原理は成立し、同様な効果を得ることができる。
【0069】
実施の形態2.
図3は、この発明の実施の形態2に係るレーダ測角装置のブロック構成図である。
この発明の実施の形態2に係るレーダ測角装置は、複数の目標が存在し、目標それぞれからの反射波の到来角を同時に推定するマルチスタティック測角装置の一つのバイスタティック測角装置である。そして、目標1からの反射波wds(t−τd)、目標2からの反射波wjs(t−τj)が到来した場合に、それぞれ到来角θd、θjを同時に推定する。そのためにこの発明の実施の形態2に係るレーダ測角装置は、この発明の実施の形態1に係るレーダ測角装置に第3の選択手段16c、第4の選択手段16d、第2のモノパルス測角演算手段5c、第2の表示手段6cを追加し、それに伴い遅延時間選択手段15Bが異なり、それ以外は同様であり、同様な部分に同じ符号を付記し説明を省略する。
【0070】
遅延時間選択手段15Bは、移動平均超分解能演算手段12が推定した遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kの中から、目標1からの遅延時間τ(ハット)dを選択し、その指数dを第1の選択手段16aと第2の選択手段16bとに指示するとともに、目標2からの遅延時間τ(ハット)jを選択し、その指数jを第3の選択手段16cと第4の選択手段16dとに指示する。
第3の選択手段16cは、第1の素波分離手段14aが演算したqΣ1、・・・、qΣk、・・・、qΣKの中から遅延時間選択手段15Bが指定する上記指数j番目のqΣjを選んで、第2のモノパルス測角演算手段5cに出力する。
第4の選択手段16dは、第3の選択手段16cに連動して、第2の素波分離手段14bが演算したqΔ1、・・・、qΔk、・・・、qΔKの中から同じく遅延時間選択手段15Bが指定するj番目のqΔjを選んで、第2のモノパルス測角演算手段5cに出力する。
【0071】
このような構成によれば、第1のモノパルス測角演算手段5aが目標1からの反射波の到来角θdを推定するのと並行して、第2のモノパルス測角演算手段5cが目標2からの反射波の到来角θjをマルチパス波の干渉を排除してより正確に推定することができる。
なお、上記実施の形態2では、モノパルス測角演算を並行に行うよう構成されているが、時分割で演算を実施することも可能である。
また、目標数は2個に限らず、到来波の個数K個のモノパルス測角演算手段5を並行に設置することによりマルチスタティックレーダ測角装置も提供することができる。
【0072】
実施の形態3.
図4は、この発明の実施の形態3に係るマルチスタティックレーダ(またはバイスタティックレーダ)の測角装置のブロック構成図である。
この発明の実施の形態3に係るマルチスタティックレーダの測角装置は、この発明の実施の形態1に係るレーダ測角装置の送信源7、送信機8および送信アンテナ17がモノパルスアンテナ1から離れた位置に配置され、送信信号を取り込むための受信アンテナ18および受信機3cを追加したことが異なり、それ以外は同様であり、同様な部分に同じ符号を付記し説明を省略する。
【0073】
受信アンテナ18は、送信アンテナ17から直接到来する送信波を受信するためアンテナである。
受信機3cは、受信アンテナ18が受信した送信波から送信信号s(t)を得る。
この発明の実施の形態3に係るマルチスタティックレーダの測角装置でも、この発明の実施の形態1に係るレーダ測角装置と同様に、モノパルスアンテナ1にマルチパス波の干渉があっても、目標からの直接波の到来角をより正確に推定できる。
【0074】
なお、上記実施の形態3では、受信アンテナ18はモノパルスアンテナ1と別体の構成としているが、受信アンテナ18の代わりにモノパルスアンテナ1のΣポートまたはΔポートからの信号を分配することによって送信信号s(t)を得ることも可能である。
また、上記実施の形態3に係るバイスタティック測角装置で送信源7、送信機8および送信アンテナ17をモノパルスアンテナ1から離れた位置に配置し、送信信号を取り込むための受信アンテナ18および受信機3cを追加しても良い。
【0075】
実施の形態4.
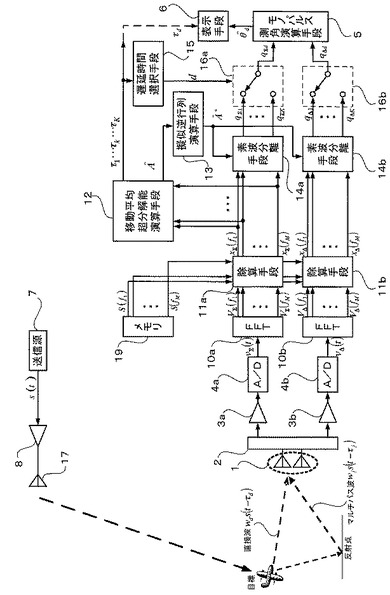
図5は、この発明の実施の形態4に係るマルチスタティックレーダ(またはバイスタティックレーダ)の測角装置のブロック構成図である。
この発明の実施の形態4に係るマルチスタティックレーダの測角装置は、送信信号s(t)が既知の場合に適用できる。そして、この発明の実施の形態3に係るバイスタティックレーダ測角装置では受信アンテナ18で送信波を直接受信した送信信号s(t)を周波数変換してスペクトルS(f1)、S(f2)、・・・、S(fM)を得ているが、この発明の実施の形態4に係るバイスタティックレーダ測角装置は、送信信号s(t)のスペクトルS(f1)、S(f2)、・・・、S(fM)をメモリ19に記憶しておく。
そして、除算手段11a、11bは、メモリ19からスペクトルS(f1)、S(f2)、・・・、S(fM)を読み出し、規格化処理を実行して、それぞれスペクトルxΣ、xΔを算出する。
【0076】
この発明の実施の形態4に係るマルチスタティックレーダの測角装置では、この発明の実施の形態1に係るレーダ測角装置と同様に、モノパルスアンテナ1にマルチパス波の干渉があっても、目標からの直接波の到来角をより正確に推定できる。
【0077】
なお、送信信号s(t)が既知であるが時間的に変わる場合には、送信源7とメモリ19の時刻同期を取るよう構成すればよい。これにより、除算手段11a、11bはこのメモリ19から変化するスペクトルS(f1)、S(f2)、・・・、S(fM)を読み出して規格化処理を実行すれば良い。
【0078】
また、送信信号s(t)のスペクトルS(f1)、S(f2)、・・・、S(fM)が式(26)を満足する場合、メモリ19のみならず、除算手段11a、11bによる規格化処理自体を省くことができる。
【0079】
【数21】
【0080】
この時、スペクトルxΣ、xΔは式(27)、式(28)となる。そしてqΔd/qΣdは式(29)となる。
【0081】
【数22】
【0082】
すなわち、式(25)と同様な関係が成立するから、送信スペクトルを読み出さなくても規格化処理をしなくても、同様な効果を奏する。
【符号の説明】
【0083】
1 モノパルスアンテナ、2 合成/分配器、3a、3b、3c 受信機、4a、4b、4c A/D変換器、5、5a、5c モノパルス測角演算手段、6、6a、6c 表示手段、7 送信源、8 送信機、10a、10b、10c FFT手段、11a、11b 除算手段、12 移動平均超分解能演算手段、13 擬似逆行列演算手段、14a、14b 素波分離手段、15、15B 遅延時間選択手段、16a、16b、16c、16d 選択手段、17 送信アンテナ、18 受信アンテナ、19 メモリ。
【技術分野】
【0001】
この発明は、レーダに到来する電波の到来角を推定する測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダに関するものである。
【背景技術】
【0002】
レーダに到来する電波の到来角を高い精度で図る方法として、モノパルス測角装置がよく知られており、モノパルスアンテナ、差分信号と合成信号を出力する合成分配器、受信機、A/D変換器、モノパルス演算手段、送信源、送信機を備える。従来のモノパルス測角方式では、例えば指向方向が僅かに異なる2つのアンテナビームの差分信号であるΔチャネルの受信信号νΔを、合成信号であるΣチャネルの受信信号νΣで規格化した値(νΔ/νΣ)を観測することにより、電波到来方向のアンテナ中心からの角度偏差、すなわち到来角を高精度に知るものである。モノパルスアンテナのΔチャネル、Σチャネルの複素アンテナゲインパターンをそれぞれ、GΔ(θ)、GΣ(θ)とすれば、これらの振幅パターンは、GΔ(θ)がアンテナ正面方向に鋭いナルを有するように設計されることが多い。
送信信号s(t)が目標から反射してwds(t−τd)となって角度θdから到来する場合、(νΔ/νΣ)は式(1)で表される。ここにwdは反射波の振幅減衰と位相変動を示す複素定数、τdは遅延時間である。
【0003】
【数1】
【0004】
各角度θとGΔ(θ)/GΣ(θ)の関係は予め知って置くことができるため、(νΔ/νΣ)の値を読み取ればそれに対応する到来角θdを精密に推定することができる(例えば、非特許文献1参照)。
【先行技術文献】
【非特許文献】
【0005】
【非特許文献1】吉田孝編、「レーダ技術」、初版、社団法人電子情報通信学会、平成8年10月、p.227−232
【発明の概要】
【発明が解決しようとする課題】
【0006】
レーダを使用する環境では目標反射波のほかに海面や地面や他の目標などの周囲の反射点を経由するマルチパス波も到来することが少なくない。直接波とは異なる方向θj、異なる到来時刻τjに到来するマルチパス波wjs(t−τj)が干渉すると、信号値(νΔ/νΣ)にマルチパス波wjs(t−τj)の寄与が加わるため、式(1)が成立せず、直接波の到来角推定精度が劣化する。
【0007】
マルチパス波の到来角θjがアンテナビーム外になるように、アンテナビームの角度幅を絞ることによりマルチパス波による角度推定誤差を低減することも考えられる。
しかしながら、アンテナビームを絞るにはアンテナ開口幅を拡大する必要があり、装置規模が増大してしまう。特に、航空機や自動車へ搭載する場合には搭載スペースの制約から困難であることが多い。
【0008】
一方、モノパルスアンテナに換えて、素子アンテナをアレー状に並べ、それぞれの素子アンテナ受信信号の相関行列を超分解能型測角演算手段に入力し、アンテナビーム内に混信して到来する複数の電波の到来角をそれぞれ推定する方法もある。この同時測角演算は、参考文献1(菊間信良著、「アレーアンテナによる適応信号処理」、科学技術出版社、1998年11月)に開示されている超分解能アルゴリズム、例えばMUSIC法やESPRITによるものである。
このような超分解能型測角法を用いれば、マルチパス波と分離して直接波の到来角を比較的正確に推定できるが、多数の素子アンテナ、受信機等を必要とするため、装置規模、重量、コストが増大する。また、マルチパス波と直接波が近接した角度から入射すると測角精度、分解能が低下する。
【0009】
この発明は、このような課題を解決するためになされたものであり、装置規模が小さくマルチパス波の干渉下でも所望波の到来角を正確に推定する測角装置、モノパルス測角装置、モノパルスレーダ、マルチスタティックレーダを得ることを目的とする。
【課題を解決するための手段】
【0010】
この発明に係る測角装置は、複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定する。
【発明の効果】
【0011】
この発明に係る測角装置によれば、モノパルスアンテナのΣチャネル受信信号とΔチャネル受信信号とをそれぞれ周波数スペクトルに分解し、Σチャネル受信信号の周波数スペクトルから各到来波の遅延時間を超分解能アルゴリズムで正確に推定し、各到来波が混合する係数行列を推定し、各到来波が混合する係数行列を共通に用いて、Σチャネル、Δチャネルに含まれる所望波(直接波)の成分を逆推定することにより分離抽出し、それぞれの所望波(直接波)の成分を用いてモノパルス測角するので、マルチパス波など不要な干渉が存在しても所望波(直接波)の到来角を正確に推定することができることである。
【図面の簡単な説明】
【0012】
【図1】この発明の実施の形態1に係るレ−ダ測角装置のブロック構成図である。
【図2】モノパルスアンテナの振幅ゲインを示す図である。
【図3】この発明の実施の形態2に係るレ−ダ測角装置のブロック構成図である。
【図4】この発明の実施の形態3に係るマルチスタティックレ−ダの測角装置のブロック構成図である。
【図5】この発明の実施の形態4に係るマルチスタティックレ−ダの測角装置のブロック構成図である。
【発明を実施するための形態】
【0013】
実施の形態1.
以下、図を用いてこの発明の実施の形態に係るレーダ測角装置について説明する。
図1は、この発明の実施の形態1に係るレーダ測角装置のブロック構成図である。
この発明の実施の形態1に係るレーダ測角装置は、モノパルスアンテナ1を用いたモノパルス測角装置であり、モノパルスアンテナ1、合成/分配器2、受信機3a、3b、A/D変換器4a、4b、モノパルス測角演算手段5、表示手段6、送信源7、送信機8、FFT手段10a、10b、10c、除算手段11a、11b、移動平均超分解能演算手段12、擬似逆行列演算手段13、素波分離手段14a、14b、遅延時間選択手段15、選択手段16a、16bを有する。
【0014】
送信源7で生成された送信信号s(t)は、モノパルスアンテナ1から放射され、目標反射波の直接波wds(t−τd)とともに単数もしくは複数のマルチパス波wjs(t−τj)が(直接波も)合わせてK波モノパルスアンテナに到来するものとする。K波それぞれの到来角をθ1、θ2、・・・、θK、遅延時間をτ1、τ2、・・・、τKとする。
合成/分配器2のΣポートから、受信機3a、A/D変換器4aを経てΣチャネル受信信号νΣが第1のFFT(高速フーリエ変換)手段10aに入力される。
Σチャネル受信信号νΣは第1のFFT(高速フーリエ変換)手段10aにより周波数変換され、Σチャネル周波数スペクトルVΣ(f1)、VΣ(f2)、・・・、VΣ(fM)で出力される。
【0015】
ここに、f1、f2、・・・、fMは同じにして、合成/分配器2のΔポートから受信機3b、A/D変換器4bを経てΔチャネル受信信号νΔが第2のFFT(高速フーリエ変換)手段10bに入力される。Δチャネル受信信号νΔは、第2のFFT(高速フーリエ変換)手段10bにより変換され、Δチャネル周波数スペクトルVΔ(f1)、VΔ(f2)、・・・、VΔ(fM)で出力される。
【0016】
一方、送信源7からフィードされた送信信号s(t)は、A/D変換器4cを経て、第3のFFT(高速フーリエ変換)手段10cにより周波数変換され、送信信号周波数スペクトルS(f1)、S(f2)、・・・、S(fM)で出力される。
第1の除算手段11aは、Σチャネル周波数スペクトルVΣ(f1)、VΣ(f2)、・・・、VΣ(fM)をそれぞれ送信信号周波数スペクトルS(f1)、S(f2)、・・・、S(fM)により規格化し、式(2)のΣチャネル規格化スペクトルxΣを算出する。
【0017】
【数2】
【0018】
同様に、第2の除算手段11bは、Δチャネル周波数スペクトルVΔ(f1)、VΔ(f2)、・・・、VΔ(fM)をそれぞれ送信信号周波数スペクトルS(f1)、S(f2)、・・・、S(fM)により規格化し、式(3)のΔチャネル規格化スペクトルxΔを算出する。
【0019】
【数3】
【0020】
移動平均超分解能演算手段12は、Σチャネル規格化スペクトルxΣ(f1)、xΣ(f2)、・・・、xΣ(fM)を入力し、式(4)のΣチャネル相関行列RΣを、参考文献1の第13章に示されているような移動平均型超分解能アルゴリズムによる遅延時間推定法で処理し、到来するK波それぞれの遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kを算出する。ここに、E[*]は統計平均を意味し、実際には時間サンプルの平均で代用されることが多い。また、Hは共役転置を意味する。
【0021】
【数4】
【0022】
また、移動平均超分解能演算手段12は、推定した遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kを用いて、式(5)の係数行列A(ハット)を算出する。
【0023】
【数5】
【0024】
擬似逆行列演算手段13は、式(5)の係数行列A(ハット)の擬似逆行列A(ハット)+を式(6)に従って算出する。
【0025】
【数6】
【0026】
第1の素波分離手段14aは、第1の除算手段11aから出力されるΣチャネル規格化スペクトルxΣ(f1)、xΣ(f2)、・・・、xΣ(fM)に擬似逆行列A(ハット)+を用いて、式(7)のqΣ1、・・・、qΣk、・・・、qΣKを演算する。なお、kは1からKの整数である。
【0027】
【数7】
【0028】
第2の素波分離手段14bは、第2の除算手段11bから出力されるΔチャネル規格化スペクトルxΔ(f1)、xΔ(f2)、・・・、xΔ(fM)に擬似逆行列A(ハット)+を用いて、式(8)のqΔ1、・・・、qΔk、・・・、qΔKを演算する。
【0029】
【数8】
【0030】
遅延時間選択手段15は、移動平均超分解能演算手段12が推定した遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kの中から、所望波である直接波の遅延時間τ(ハット)dを選択し、その指数dを出力する。
なお、直接波はマルチパス波に比べて最も早く到来するため、遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kが最小となるものの指数を指数dとして決定することもできる。
【0031】
第1の選択手段16aは、第1の素波分離手段14aが演算したqΣ1、・・・、qΣk、・・・、qΣKの中から遅延時間選択手段15が指定する指数d番目のqΣdを選んで、モノパルス測角演算手段5に出力する。
第2の選択手段16bも連動して、第2の素波分離手段14bが演算したqΔ1、・・・、qΔk、・・・、qΔKの中から同じく遅延時間選択手段15が指定する指数d番目のqΔdを選んで、モノパルス測角演算手段5に出力する。
【0032】
モノパルス測角演算手段5は、qΣdとqΔdを入力し、(qΔd/qΣd)がテーブルGΔ(θ)/GΣ(θ)の値に一致する角度θを選び、これを所望波である直接波の到来角度θ(ハット)dとして表示手段6に出力する。すなわち、θ(ハット)dは式(9)を満たす角度として推定される。
【0033】
【数9】
【0034】
次に、この発明の実施の形態1に係るレーダ測角装置で採用した原理を説明する。
送信信号s(t)は、直接波wds(t−τd)とともに複数のマルチパス波wjs(t−τj)の合成波であるから、モノパルスアンテナ1のΣチャネルの受信信号νΣはノイズを無視すれば、式(10)のように表現できる。
【0035】
【数10】
【0036】
これをフーリエ変換して得たΣチャネル周波数スペクトルVΣ(f1)、VΣ(f2)、・・・、VΣ(fM)は式(11)のように表現できる。
【0037】
【数11】
【0038】
従って、式(2)で定義されるΣチャネル規格化スペクトルxΣ=[xΣ(f1),xΣ(f2),・・・,xΣ(fM)]Tは、式(12)のように表現できることになる。Tは転置を意味する。ここで係数行列Aは式(13)で、ベクトルqΣは式(14)で表される。
【0039】
【数12】
【0040】
ここで、式(14)のベクトルqΣの第k成分wkGΣ(θk)は、第k到来波の寄与(素波の成分)である。これは式(12)の最小二乗解として式(15)のようにΣチャネル規格化スペクトルから推定できる。従って、ベクトルqΣは式(12)の最小二乗解としてΣチャネル規格化スペクトルxΣ=[xΣ(f1),xΣ(f2),・・・,xΣ(fM)]Tと式(13)の係数行列Aから式(15)のように推定できる。なお、係数行列Aの擬似逆行列A+は式(16)から求められる。
【0041】
【数13】
【0042】
一方、式(10)と同様に、モノパルスアンテナ1のΔチャネルの受信信号νΔは式(17)と表すことができる。
【0043】
【数14】
【0044】
これをフーリエ変換したΔチャネル周波数スペクトルVΔ(f1)、VΔ(f2)、・・・、VΔ(fM)は式(11)と同様に式(18)のように表現できる。
【0045】
【数15】
【0046】
従って、式(3)で定義されるΔチャネル規格化スペクトルxΔは式(19)、式(20)で表現できることになる。
【0047】
【数16】
【0048】
式(20)に示されるベクトルqΔの第k成分wkGΔ(θk)は第k到来波のΔチャネルへの寄与(素波の成分)である。従って、ベクトルqΔは式(19)の最小二乗解としてΔチャネル規格化スペクトルxΔと式(13)の係数行列Aから式(21)のように推定できる。
【0049】
【数17】
【0050】
このように移動平均超分解能演算手段12は式(22)に示すように各到来波の遅延時間τ1、τ2、・・・、τKをほぼ正しく推定することができる。
【0051】
【数18】
【0052】
移動平均超分解能演算手段12が出力する係数行列A(ハット)と、擬似逆行列演算手段13が出力する擬似逆行列A(ハット)+は、それぞれ式(23)、式(24)と推定される。
【0053】
【数19】
【0054】
このとき、第1の素波分離手段14aは、第1の除算手段11aが出力するΣチャネル規格化スペクトルxΣと擬似逆行列演算手段13が出力する擬似逆行列A(ハット)+からベクトルqΣを式(15)のように推定できる。
同様に、第2の素波分離手段14bは、第2の除算手段11bが出力するΔチャネル規格化スペクトルxΔと擬似逆行列演算手段13が出力する擬似逆行列A(ハット)+からベクトルqΔを式(21)のように推定できる。
【0055】
さらに、遅延時間選択手段15が所望波である直接波の遅延時間τ(ハット)dを正しく選択すれば、第1の選択手段16aは、第1の素波分離手段14aが出力したqΣ1、・・・、qΣk、・・・、qΣKの要素の中から直接波の成分qΣdを選んでモノパルス測角演算手段5に出力する。
同時に、第2の選択手段16bは、第2の素波分離手段14bが出力したqΔ1、・・・、qΔk、・・・、qΔKの要素の中から直接波の成分qΔdを選んでモノパルス測角演算手段5に出力する。
【0056】
モノパルス測角演算手段5は成分qΣdと成分qΔdを入力し(qΔd/qΣd)を演算するが、式(15)と式(21)から式(25)の関係が成り立つことがわかる。
【0057】
【数20】
【0058】
このことは、(qΔd/qΣd)は、マルチパス波が到来せず所望波である直接波のみが単独に到来した場合に成立するモノパルス測角の原理式(1)である複素ゲインの比GΔ(θd)/GΣ(θd)と等価であることを意味する。
従って、モノパルス測角演算手段5が、(qΔd/qΣd)の値にテーブル値GΔ(θ)/GΣ(θ)が一致する角度θを選ぶことは、直接波のみが単独に到来した場合のモノパルス測角処理と等価であるから、マルチパス波のよる干渉の効果が抑圧できて、正確に直接波の到来角θdが推定される。
【0059】
上記実施の形態1では、移動平均超分解能演算手段12がΔチャネルではなくてΣチャネルの規格化スペクトルxΣ(f1)、xΣ(f2)、・・・、xΣ(fM)を入力して係数行列A(ハット)を算出するところにも特徴がある。
モノパルスアンテナによる測角では、一般にΣチャネルの受信電力が高く、Δチャネルの受信電力が0近くになるヌル、すなわち図2中のθ=0の近傍にアンテナを向けて観測することが多い。この場合、Σチャネルの高い受信電力すなわち高いSN比の信号で超分解能アルゴリズムによる遅延時間推定を実行するので、遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kの推定精度が高く、ひいては係数行列A(ハット)の擬似逆行列A(ハット)+を正確に推定することができるからである。
【0060】
以上まとめると、本発明の実施の形態1による構成では、モノパルスアンテナ1のΣチャネル受信信号とΔチャネル受信信号とをそれぞれ周波数スペクトルに分解し、Σチャネル受信信号の周波数スペクトルから各到来波の遅延時間を超分解能アルゴリズムで正確に推定し、各到来波が混合する係数行列を推定する。そして、この各到来波が混合する係数行列を共通に用いて、Σチャネル、Δチャネルに含まれる所望波(直接波)の成分を逆推定することにより分離抽出する。それぞれの所望波(直接波)の成分を用いてモノパルス測角するので、マルチパス波など不要な干渉が存在しても所望波(直接波)の到来角を正確に推定することができる。
【0061】
なお、上記実施の形態1での例の移動平均超分解能演算手段12が遅延時間を推定する際に用いる超分解能アルゴリズムとしては、参考文献1にも開示されているMUSIC法やESPRITなどが代表的であるが、最尤推定法による遅延時間推定でも同様な効果を奏する。この場合、相関行列RΣの要素の移動平均は必要ない。
また、移動平均超分解能演算手段12は、遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kを複数のサンプルから求めてそれぞれ平均化した遅延推定値を式(5)に代入して係数行列A(ハット)を算出してもよい。
【0062】
また、モノパルスアンテナ1と合成/分配器2がΣチャネル、水平角観測のためのΔazチャネル、仰角観測のためのΔelチャネルの3チャネル受信信号を出力する場合には、Δazチャネル、Δelチャネル共に、上記実施の形態1の例と同様に構成して、所望波の水平角、仰角を同時に推定することもできる。
【0063】
なお、上記実施の形態1の例で、表示手段6は、モノパルス測角演算手段5が出力する直接波の到来角θ(ハット)dに加え、遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kの中から遅延時間選択手段15が指定するd番目の遅延時間τ(ハット)dも合わせて入力し、遅延時間と到来角をペアで表示してもよい。この場合、モノパルスアンテナ1を基準とした相対的な目標位置が推定できる。
【0064】
また、モノパルス測角演算手段5が出力する直接波の到来角θ(ハット)dをモノパルスアンテナ1の駆動機構にフィードバックして、モノパルスアンテナ1の指向方向を目標に追尾するようにすることもできる。
【0065】
また、上記実施の形態1の例ではモノパルスアンテナ1のΣチャネルのスペクトルを移動平均超分解能演算手段12に入力するように構成しているが、Δチャネルの受信電力が小さくない場合、Δチャネルのスペクトルを移動平均超分解能演算手段12に入力するように構成することもできる。
【0066】
また、上記実施の形態1の例では、モノパルスアンテナ1に適用する構成としているが、モノパルスアンテナ1の代わりに2素子以上の素子アンテナを用いる場合にも適用できる。この場合、第1の素子アンテナに受信機3aを接続し、第2の素子アンテナに受信機3bを接続するように構成して、第1の素波分離手段14aが出力するqΣdと第2の素波分離手段14bが出力するqΔdとの位相差または振幅差または両方を用いて直接波の到来角を推定することができ、同様な効果を示すことができる。アレーアンテナを形成する複数の素子アンテナの受信信号を合成した信号を受信機3に接続するような構成もある。
【0067】
また、上記実施の形態1の例では、受信信号のスペクトルをFFT(高速フーリエ変換)手段10により周波数変換して求めているが、代りに一般のフーリエ変換演算やフィルタバンクによってスペクトルを求めるよう構成することもできる。
【0068】
なお、式(11)以下では簡単のため受信機ノイズを無視して説明したが、受信機ノイズが存在する場合でも原理は成立し、同様な効果を得ることができる。
【0069】
実施の形態2.
図3は、この発明の実施の形態2に係るレーダ測角装置のブロック構成図である。
この発明の実施の形態2に係るレーダ測角装置は、複数の目標が存在し、目標それぞれからの反射波の到来角を同時に推定するマルチスタティック測角装置の一つのバイスタティック測角装置である。そして、目標1からの反射波wds(t−τd)、目標2からの反射波wjs(t−τj)が到来した場合に、それぞれ到来角θd、θjを同時に推定する。そのためにこの発明の実施の形態2に係るレーダ測角装置は、この発明の実施の形態1に係るレーダ測角装置に第3の選択手段16c、第4の選択手段16d、第2のモノパルス測角演算手段5c、第2の表示手段6cを追加し、それに伴い遅延時間選択手段15Bが異なり、それ以外は同様であり、同様な部分に同じ符号を付記し説明を省略する。
【0070】
遅延時間選択手段15Bは、移動平均超分解能演算手段12が推定した遅延時間推定値τ(ハット)1、τ(ハット)2、・・・、τ(ハット)Kの中から、目標1からの遅延時間τ(ハット)dを選択し、その指数dを第1の選択手段16aと第2の選択手段16bとに指示するとともに、目標2からの遅延時間τ(ハット)jを選択し、その指数jを第3の選択手段16cと第4の選択手段16dとに指示する。
第3の選択手段16cは、第1の素波分離手段14aが演算したqΣ1、・・・、qΣk、・・・、qΣKの中から遅延時間選択手段15Bが指定する上記指数j番目のqΣjを選んで、第2のモノパルス測角演算手段5cに出力する。
第4の選択手段16dは、第3の選択手段16cに連動して、第2の素波分離手段14bが演算したqΔ1、・・・、qΔk、・・・、qΔKの中から同じく遅延時間選択手段15Bが指定するj番目のqΔjを選んで、第2のモノパルス測角演算手段5cに出力する。
【0071】
このような構成によれば、第1のモノパルス測角演算手段5aが目標1からの反射波の到来角θdを推定するのと並行して、第2のモノパルス測角演算手段5cが目標2からの反射波の到来角θjをマルチパス波の干渉を排除してより正確に推定することができる。
なお、上記実施の形態2では、モノパルス測角演算を並行に行うよう構成されているが、時分割で演算を実施することも可能である。
また、目標数は2個に限らず、到来波の個数K個のモノパルス測角演算手段5を並行に設置することによりマルチスタティックレーダ測角装置も提供することができる。
【0072】
実施の形態3.
図4は、この発明の実施の形態3に係るマルチスタティックレーダ(またはバイスタティックレーダ)の測角装置のブロック構成図である。
この発明の実施の形態3に係るマルチスタティックレーダの測角装置は、この発明の実施の形態1に係るレーダ測角装置の送信源7、送信機8および送信アンテナ17がモノパルスアンテナ1から離れた位置に配置され、送信信号を取り込むための受信アンテナ18および受信機3cを追加したことが異なり、それ以外は同様であり、同様な部分に同じ符号を付記し説明を省略する。
【0073】
受信アンテナ18は、送信アンテナ17から直接到来する送信波を受信するためアンテナである。
受信機3cは、受信アンテナ18が受信した送信波から送信信号s(t)を得る。
この発明の実施の形態3に係るマルチスタティックレーダの測角装置でも、この発明の実施の形態1に係るレーダ測角装置と同様に、モノパルスアンテナ1にマルチパス波の干渉があっても、目標からの直接波の到来角をより正確に推定できる。
【0074】
なお、上記実施の形態3では、受信アンテナ18はモノパルスアンテナ1と別体の構成としているが、受信アンテナ18の代わりにモノパルスアンテナ1のΣポートまたはΔポートからの信号を分配することによって送信信号s(t)を得ることも可能である。
また、上記実施の形態3に係るバイスタティック測角装置で送信源7、送信機8および送信アンテナ17をモノパルスアンテナ1から離れた位置に配置し、送信信号を取り込むための受信アンテナ18および受信機3cを追加しても良い。
【0075】
実施の形態4.
図5は、この発明の実施の形態4に係るマルチスタティックレーダ(またはバイスタティックレーダ)の測角装置のブロック構成図である。
この発明の実施の形態4に係るマルチスタティックレーダの測角装置は、送信信号s(t)が既知の場合に適用できる。そして、この発明の実施の形態3に係るバイスタティックレーダ測角装置では受信アンテナ18で送信波を直接受信した送信信号s(t)を周波数変換してスペクトルS(f1)、S(f2)、・・・、S(fM)を得ているが、この発明の実施の形態4に係るバイスタティックレーダ測角装置は、送信信号s(t)のスペクトルS(f1)、S(f2)、・・・、S(fM)をメモリ19に記憶しておく。
そして、除算手段11a、11bは、メモリ19からスペクトルS(f1)、S(f2)、・・・、S(fM)を読み出し、規格化処理を実行して、それぞれスペクトルxΣ、xΔを算出する。
【0076】
この発明の実施の形態4に係るマルチスタティックレーダの測角装置では、この発明の実施の形態1に係るレーダ測角装置と同様に、モノパルスアンテナ1にマルチパス波の干渉があっても、目標からの直接波の到来角をより正確に推定できる。
【0077】
なお、送信信号s(t)が既知であるが時間的に変わる場合には、送信源7とメモリ19の時刻同期を取るよう構成すればよい。これにより、除算手段11a、11bはこのメモリ19から変化するスペクトルS(f1)、S(f2)、・・・、S(fM)を読み出して規格化処理を実行すれば良い。
【0078】
また、送信信号s(t)のスペクトルS(f1)、S(f2)、・・・、S(fM)が式(26)を満足する場合、メモリ19のみならず、除算手段11a、11bによる規格化処理自体を省くことができる。
【0079】
【数21】
【0080】
この時、スペクトルxΣ、xΔは式(27)、式(28)となる。そしてqΔd/qΣdは式(29)となる。
【0081】
【数22】
【0082】
すなわち、式(25)と同様な関係が成立するから、送信スペクトルを読み出さなくても規格化処理をしなくても、同様な効果を奏する。
【符号の説明】
【0083】
1 モノパルスアンテナ、2 合成/分配器、3a、3b、3c 受信機、4a、4b、4c A/D変換器、5、5a、5c モノパルス測角演算手段、6、6a、6c 表示手段、7 送信源、8 送信機、10a、10b、10c FFT手段、11a、11b 除算手段、12 移動平均超分解能演算手段、13 擬似逆行列演算手段、14a、14b 素波分離手段、15、15B 遅延時間選択手段、16a、16b、16c、16d 選択手段、17 送信アンテナ、18 受信アンテナ、19 メモリ。
【特許請求の範囲】
【請求項1】
複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、
各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定することを特徴とする測角装置。
【請求項2】
複数の到来波が混信入射するモノパルスアンテナ、上記モノパルスアンテナの複数のポートそれぞれに接続された受信機を有するモノパルス測角装置であって、
各上記ポートの受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定することを特徴とするモノパルス測角装置。
【請求項3】
上記モノパルスアンテナのΣポートの受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定することを特徴とする請求項2に記載のモノパルス測角装置。
【請求項4】
複数の到来波が混信入射するモノパルスアンテナ、上記モノパルスアンテナの複数のポートそれぞれに接続された受信機を有するモノパルスレーダであって、
各上記ポートの受信信号を周波数スペクトルに変換し、各上記受信信号の周波数スペクトルを送信信号の周波数スペクトルでそれぞれ除し、Σポートの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定することを特徴とするモノパルスレーダ。
【請求項5】
送信信号を受信する手段を有するとともに上記受信した送信信号を周波数スペクトルに変換するまたは送信信号の周波数スペクトルを記憶する手段を有することを特徴とする請求項4に記載のモノパルスレーダ。
【請求項6】
複数の到来波が混信入射するモノパルスアンテナ、上記モノパルスアンテナの複数のポートそれぞれに接続された受信機を持つマルチスタティックレーダであって、
各上記ポートの受信信号を周波数スペクトルに変換し、各上記受信信号の周波数スペクトルを上記送信信号の周波数スペクトルでそれぞれ除し、Σポートの上記周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定することを特徴とするマルチスタティックレーダ。
【請求項7】
送信信号を受信する手段を有するとともに上記受信した送信信号を周波数スペクトルに変換するまたは送信信号の周波数スペクトルを記憶する手段を有することを特徴とする請求項6に記載のマルチスタティックレーダ。
【請求項8】
送信装置から送信信号のタイミングを受信する請求項6または7に記載のマルチスタティックレーダ。
【請求項9】
各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の中から、上記受信信号毎に最も小さい上記遅延時間に対応する成分を選び、上記選んだ成分の振幅差または位相差から上記到来波の到来角を推定することを特徴とする請求項1に記載の測角装置。
【請求項1】
複数の到来波が混信入射する複数の受信アンテナ、上記受信アンテナそれぞれに接続された受信機を有する測角装置であって、
各受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の逆行列または擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定することを特徴とする測角装置。
【請求項2】
複数の到来波が混信入射するモノパルスアンテナ、上記モノパルスアンテナの複数のポートそれぞれに接続された受信機を有するモノパルス測角装置であって、
各上記ポートの受信信号を周波数スペクトルに変換し、一つの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定することを特徴とするモノパルス測角装置。
【請求項3】
上記モノパルスアンテナのΣポートの受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定することを特徴とする請求項2に記載のモノパルス測角装置。
【請求項4】
複数の到来波が混信入射するモノパルスアンテナ、上記モノパルスアンテナの複数のポートそれぞれに接続された受信機を有するモノパルスレーダであって、
各上記ポートの受信信号を周波数スペクトルに変換し、各上記受信信号の周波数スペクトルを送信信号の周波数スペクトルでそれぞれ除し、Σポートの上記受信信号の周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定することを特徴とするモノパルスレーダ。
【請求項5】
送信信号を受信する手段を有するとともに上記受信した送信信号を周波数スペクトルに変換するまたは送信信号の周波数スペクトルを記憶する手段を有することを特徴とする請求項4に記載のモノパルスレーダ。
【請求項6】
複数の到来波が混信入射するモノパルスアンテナ、上記モノパルスアンテナの複数のポートそれぞれに接続された受信機を持つマルチスタティックレーダであって、
各上記ポートの受信信号を周波数スペクトルに変換し、各上記受信信号の周波数スペクトルを上記送信信号の周波数スペクトルでそれぞれ除し、Σポートの上記周波数スペクトルを用いて超分解能アルゴリズムに従って各上記到来波の遅延時間を推定し、上記推定した遅延時間から各上記到来波の周波数スペクトルが混合する係数行列を推定し、上記混合する係数行列の擬似逆行列を求め、各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の間の振幅差または位相差から上記到来波の到来角を推定することを特徴とするマルチスタティックレーダ。
【請求項7】
送信信号を受信する手段を有するとともに上記受信した送信信号を周波数スペクトルに変換するまたは送信信号の周波数スペクトルを記憶する手段を有することを特徴とする請求項6に記載のマルチスタティックレーダ。
【請求項8】
送信装置から送信信号のタイミングを受信する請求項6または7に記載のマルチスタティックレーダ。
【請求項9】
各上記受信信号の周波数スペクトルに上記擬似逆行列を共通に乗じて得られた成分の中から、上記受信信号毎に最も小さい上記遅延時間に対応する成分を選び、上記選んだ成分の振幅差または位相差から上記到来波の到来角を推定することを特徴とする請求項1に記載の測角装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−286403(P2010−286403A)
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願番号】特願2009−141442(P2009−141442)
【出願日】平成21年6月12日(2009.6.12)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成22年12月24日(2010.12.24)
【国際特許分類】
【出願日】平成21年6月12日(2009.6.12)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]