
測角装置、レーダ装置、測角方法及び測角プログラム
【課題】マルチパス環境下において、短時間でより精度の高い仰角推定を可能とする測角装置等を提供する。
【解決手段】測角装置としての測角処理器5は、第1仰角算出部51、第2仰角算出部52及び直接波仰角出力部50を備えたことを特徴とする。第1仰角算出部51は、受信信号に基づいて直接波仰角及び間接波仰角を算出する。第2仰角算出部52は、受信信号に基づいて直接波仰角のみを算出する。直接波仰角出力部50は、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力する。
【解決手段】測角装置としての測角処理器5は、第1仰角算出部51、第2仰角算出部52及び直接波仰角出力部50を備えたことを特徴とする。第1仰角算出部51は、受信信号に基づいて直接波仰角及び間接波仰角を算出する。第2仰角算出部52は、受信信号に基づいて直接波仰角のみを算出する。直接波仰角出力部50は、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、目標を検出するレーダ装置等に関し、特に地面や海面等からの反射波があるマルチパス環境下で目標の仰角情報を検出する測角技術に関するものである。
【背景技術】
【0002】
レーダ装置は、一般に空間に電波を発射して、目標からの反射信号を受信することにより、目標の存在を探知し、その位置や運動状況などを観測するものである。レーダ装置において、電波(送信ビーム)は、空中線から空間に発射され、目標に当たって反射した後、再び空中線で受けられ、受信器等へレーダ受信信号として出力される。そして、レーダ受信信号を所定のサンプリング間隔でA/D変換し、サンプリング点毎のディジタル受信信号の振幅値をしきい値と比較し、しきい値以上のディジタル受信信号を目標信号と判定することにより、目標信号を検出する。測距処理では、電波を発射した時刻と目標信号を検出した時刻との差分に基づいて、目標の距離情報を得る。この目標の探知と距離情報の測定とが、レーダ装置の基本機能であり最も簡単な構成である。
【0003】
送信ビームの方位を変化させ、方位の異なるレーダ受信信号を得て、方位測角処理を行うことにより、目標の方位情報を得ることができる。更に、仰角の異なる複数の送信ビームを発射し、同じ目標から反射信号を受信し、仰角の異なる受信信号の振幅差や位相差を使って仰角測角処理を行うことによって、目標の高度情報を得ることができる。
【0004】
観測したい空間に一通り電波発射することを、スキャンと呼ぶ。レーダ装置は、スキャンの動作を繰り返し行うことで、目標情報を所定の間隔で連続して取得することができる。代表的な仰角方向の測角方式として、例えば振幅比較方式やモノパルス方式が知られている。
【0005】
振幅比較方式の場合、仰角方向に連続して設定した複数のビームで目標を検出し、最も受信強度の大きいビームを用いて測角値を求めている。マルチパス対策として、受信ビームの指向中心を上方にずらして設定(オフボア)した振幅比較方式が利用されている。この方式により、地面や海面からの反射波の影響を軽減する。
【0006】
一方、モノパルス方式は、和差除算信号Δ/Σが仰角θに対して一定の特性曲線を描く関係となることを利用して、直接波の到来角を求めている。
【0007】
マルチパスの影響が無視できる環境下では、モノパルス方式を用いることにより、振幅比較測角方式を用いた場合に比べ高精度のデータを得ることができる。しかしながら、モノパルス方式を用いた場合、マルチパス環境下では測角精度が劣化することが知られている(非特許文献1)。これは、モノパルス方式でのビーム形状において、差ビームの形状が間接波を受信しやすいことに由来する。つまり、マルチパス環境下における低仰角目標に対しては、目標からの直接波に加え、地面や海面等に反射して別の経路を伝播した間接波も到来するため、受信信号の和信号と差信号との複素除算結果であるΔ/Σが、直接波のみの場合のΔ/Σと異なる値として観測されるからである。
【0008】
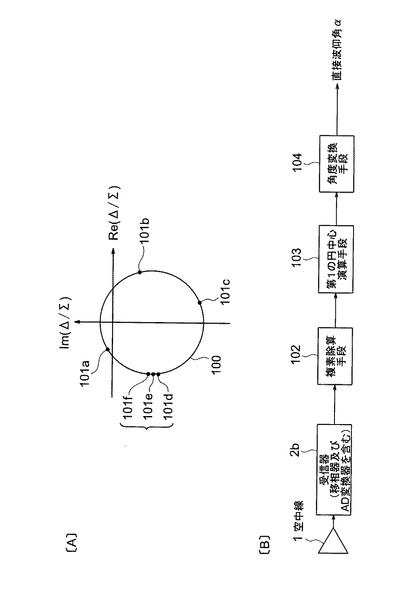
実際、マルチパス環境下では、観測期間中において、(1)目標が低仰角で遠距離を移動していることにより目標の移動に伴う仰角の変化が無視でき、(2)直接波とマルチパス間接波との相対振幅比の変化が小さく、(3)直接波と間接波との相対位相差φの変動が大きくなる、という条件下では、図10[A]に示す通りΔ/Σが複素平面上で円軌跡100を描く(非特許文献1)。
【0009】
これに対して、マルチパス環境下においてモノパルス方式により高精度な測角を実現する手段として、特許文献1で示された技術がある。その概略的な構成図を図10[B]に示す。第1の円中心演算手段103及び角度変換手段104を有する点が、この技術の特徴である。第1の円中心演算手段103は、複素除算手段102にて算出されたΔ/Σを基に、Δ/Σが複素平面上で描く円軌跡100の半径と中心座標を算出する。角度変換手段104は、第1の円中心演算手段103で得られた半径と中心座標から、直接波の到来角を算出する。
【0010】
ここで、マルチパス環境下において高精度な測角を行うためには、図10[A]に示す円軌跡100を精度良く求める必要がある。そのため、特許文献1では、ある間隔で同一周波数の電波を送信し3回以上観測し、複素平面上で異なる三個以上のΔ/Σの座標を求める方法が示されている。この方法は、目標が動いている場合、目標との距離が変化して直接波と間接波の相対位相差φが変化することを利用している。各観測の時間間隔をある程度保つことにより、複素平面上の観測点は、図10[A]における観測点101a、101b、101cの例が示す通り互いに離れた位置関係でプロットされるため、これらの観測点の座標から円軌跡100を高精度に求めることが可能となる。ただし、各観測の時間間隔が短くなると、図10[A]における複素平面上の観測点101d、101e、101fの例のように各点が接近してしまうため、円軌跡100を正確に求めることが困難になる。よって、円軌跡を精度良く求めるためには、観測中に目標がある程度移動している必要があり、実用上複数スキャンにわたる観測が必要になる。
【0011】
なお、マルチパスの影響を排除するその他の関連技術が、特許文献2、3等に開示されている。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特許第3353991号公報
【特許文献2】特開2010−85283号公報
【特許文献1】特開平11−118919号公報
【非特許文献】
【0013】
【非特許文献1】Samuel M.Sherman;“Monopulse Principles and Techniques” , Artech House, Inc. 1983
【発明の概要】
【発明が解決しようとする課題】
【0014】
地面又は海面からの反射波があるマルチパス環境下において、振幅比較方式のうちオフボア方式を採用した場合、オフボアすると、対象とする目標からの受信信号も弱くなってしまい、目標検出自体が困難になるという問題がある。
【0015】
一方、モノパルス方式を用いた特許文献1の方式においては、複素平面上で異なるΔ/Σの座標を求める必要がある。このとき、同一周波数の同一ΣΔビームを複数回放射するため、実用上複数スキャンにわたる観測が必要となり、観測時間が長くなるという問題がある。
【0016】
本発明の目的は、上述した技術の問題点を解決することであり、マルチパス環境下において、短時間でより精度の高い仰角推定を可能とする測角装置等を得ることである。
【課題を解決するための手段】
【0017】
本発明に係る測角装置は、
受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出部と、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出部と、
前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する直接波仰角出力部と、
を備えたことを特徴とする。
【0018】
本発明に係るレーダ装置は、
レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線と、
高周波信号を前記空中線に出力するともに前記空中線で受信された信号を検波する送受信器と、
前記送受信器による受信処理後の信号から複数の受信ビームを形成するとともに、形成した各受信ビームでの受信信号を抽出するビーム形成器と、
前記ビーム形成器で形成された各ビームでの受信信号に基づいて目標を検出する目標検出器と、
前記目標検出器で前記目標が検出された場合に前記ビーム形成器で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器と、
前記選択された受信ビーム及び当該受信ビームにより算出された受信信号に基づいて測角処理を行う本発明に係る測角装置と、
を備えたことを特徴とする。
【0019】
本発明に係る測角方法は、
第1仰角算出部が、受信信号に基づいて直接波仰角及び間接波仰角を算出し、
第2仰角算出部が、前記受信信号に基づいて前記直接波仰角のみを算出し、
直接波仰角出力部が、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する、
ことを特徴とする。
【0020】
本発明に係る測角プログラムは、
受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出手段、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出手段、及び、
前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出手段で算出された前記直接波仰角を出力し、前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出手段で算出された前記直接波仰角を出力する直接波仰角出力手段、
としてコンピュータを機能させるためのものである。
【発明の効果】
【0021】
本発明によれば、直接波のみならず間接波も考慮した上で直接波仰角を算出することにより、マルチパス環境下において短時間で高精度な測角が可能となる。これに加え、直接波のみの場合を想定した測角処理も併用しているため、マルチパスの影響の有無に関わらず測角が可能となる。
【図面の簡単な説明】
【0022】
【図1】実施形態1のレーダ装置を示すブロック図である。
【図2】図1における測角処理器(実施形態1の測角装置)を示すブロック図である。
【図3】実施形態1において形成される受信ビームを示すグラフである。
【図4】マルチパス環境を模式的に示す説明図である。
【図5】式(8)の算出結果を示すグラフであり、図5[A]は解が二個求められた場合の一例を示すグラフであり、図5[B]は解が二個求められなかった場合の一例を示すグラフである。
【図6】図6[A]は実施形態1の測角方法の一例を示すフローチャートであり、図6[B]は実施形態1の測角プログラムを実行するコンピュータの一例を示すブロック図である。
【図7】実施形態2のレーダ装置の第一例(DBFを採用した場合)を示すブロック図である。
【図8】実施形態2のレーダ装置の第二例(ABFを採用した場合)を示すブロック図である。
【図9】実施形態2において形成される受信ビームを示すグラフである。
【図10】図10[A]はマルチパス環境下においてΔ/Σが複素平面上で円軌跡を描く様子を示すグラフであり、図10[B]は特許文献1記載の測角装置を示すブロック図である。
【発明を実施するための形態】
【0023】
以下、上述の問題を解決した本発明の実施形態について、図面を参照して詳細に説明する。すべての図面において、同様な構成要素には同様の符号を付す。
【0024】
<実施形態1>
図1は、実施形態1のレーダ装置を示すブロック図である。図2は、図1における測角処理器を示すブロック図である。以下、これらの図面に基づき説明する。本実施形態1は、レーダ装置の他、測角装置、測角方法及び測角プログラムの実施形態も含む。
【0025】
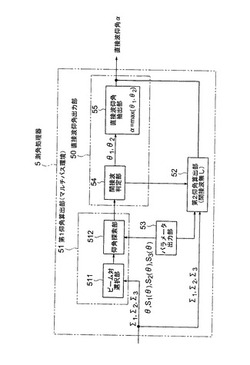
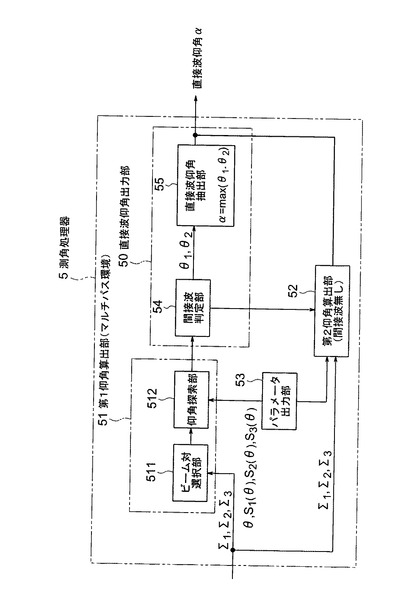
本実施形態1の測角装置としての測角処理器5は、第1仰角算出部51、第2仰角算出部52及び直接波仰角出力部50を備えたことを特徴とする。第1仰角算出部51は、受信信号に基づいて直接波仰角及び間接波仰角を算出する。第2仰角算出部52は、受信信号に基づいて直接波仰角のみを算出する。直接波仰角出力部50は、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力する。
【0026】
ここで、三本の受信ビームをビーム1、ビーム2、ビーム3とし、ビーム1についての受信信号を受信信号1とし、ビーム2についての受信信号を受信信号2とし、ビーム3についての受信信号を受信信号3とする。かつ、受信信号1が仰角の関数であるビームパターン1を含むとし、受信信号2が仰角の関数であるビームパターン2を含むとし、受信信号3が仰角の関数であるビームパターン3を含むとする。
【0027】
このとき、第1仰角算出部51は、ビーム対選択部511及び仰角探索部512を有する、としてもよい。ビーム対選択部551は、三本の受信ビームの中から、ビーム1及びビーム2からなるビーム対1と、ビーム2及びビーム3からなるビーム対2とを選択する。仰角探索部512は、ビーム対1について、ビームパターン1とビームパターン2との商からなる位相補正項を重みとした受信信号2を、受信信号1から差し引いた複素数の位相を算出し、ビーム対2について、ビームパターン2とビームパターン3との商からなる位相補正項を重みとした受信信号3を、受信信号2から差し引いた複素数の位相を算出し、両者の位相の差が零又は180度の整数倍に等しくなる条件を満たす仰角を探索する。
【0028】
直接波仰角出力部50は、間接波判定部54及び直接波仰角抽出部55を有する、としてもよい。間接波判定部54は、第1仰角算出部51にて前記条件を満たす仰角が二個求められた場合は、第1仰角算出部51による算出結果を用いる判定をし、第1仰角算出部51にて前記条件を満たす仰角が二個求められなかった場合は、第2仰角算出部52による算出結果を用いる判定をする。直接波仰角抽出部55は、間接波判定部54が第1仰角算出部51による算出結果を用いる判定をしたときは、前記条件を満たす二個の仰角のうち大きい方を直接波仰角として出力する。第2仰角算出部52は、間接波判定部54が第2仰角算出部52による算出結果を用いる判定をしたときは、第2仰角算出部52による算出結果を直接波仰角として出力する。
【0029】
測角処理器5は、パラメータ出力部53を更に備えてもよい。パラメータ出力部53は、前記算出に必要なパラメータを第1仰角算出部51及び第2仰角算出部52へ出力する。なお、パラメータ出力部53を省略して、パラメータ出力部53の機能を第1仰角算出部51及び第2仰角算出部52のそれぞれに持たせてもよい。
【0030】
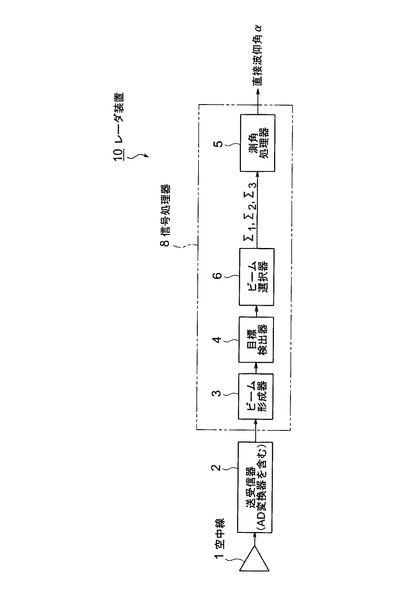
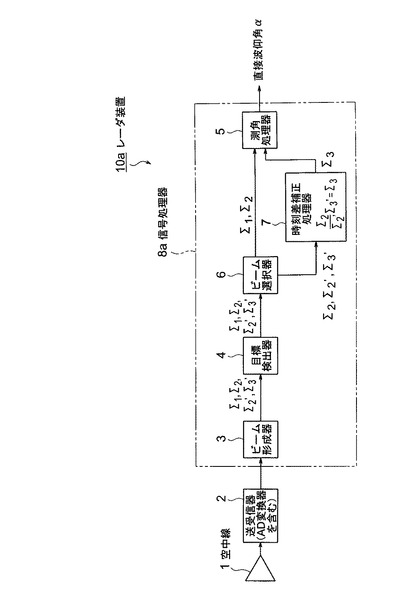
本実施形態1のレーダ装置10は、レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線1と、高周波信号を空中線1に出力するともに空中線1で受信された信号を検波する送受信器2と、送受信器2による受信処理後の信号から複数の受信ビームを形成するとともに、形成した各受信ビームでの受信信号を抽出するビーム形成器3と、ビーム形成器3で形成された各ビームでの受信信号に基づいて目標を検出する目標検出器4と、目標検出器4で前記目標が検出された場合にビーム形成器3で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器6と、前記選択された受信ビーム及び当該受信ビームにより算出された受信信号に基づいて測角処理を行う測角処理器5と、を備えている。
【0031】
ビーム形成器3は、測角処理に必要な受信信号を全て同時刻に形成し、第1仰角算出部51における処理に必要となる三本以上の受信ビーム及び第2仰角算出部52における処理に必要となる受信ビームを形成する、としてもよい。ビーム選択器6は、第1仰角算出部51における処理に必要となる三本の受信ビームを選択する、としてもよい。
【0032】
以下、本実施形態1について更に詳しく説明する。
【0033】
本実施形態1のレーダ装置10は、空中線1、送受信器2、ビーム形成器3、目標信号検出器4、ビーム選択器6、及び、測角装置としての測角処理器5を備えている。ビーム形成器3、目標信号検出器4、ビーム選択器6及び測角処理器5は、信号処理器8を構成している。
【0034】
送受信器2は、高周波信号を空中線1へ出力する。すると、空中線1は、高周波信号を空中の所定の方向に向けて放射するとともに、目標から反射された電波を受信し、受信した高周波信号を送受信器2へ出力する。送受信器2は、空中線1より送られた受信信号を検波し、A/D変換してディジタル受信信号としてビーム形成器3に送る。
【0035】
ビーム形成器3は、送受信器2から送られてくる複数のディジタル受信信号に基づいて、三本以上の受信ビームを同時に形成するとともに、形成した各受信ビームでの受信信号を算出する。受信ビームの形成には、通常、ディジタルビーム形成(DBF)技術が使われるが、アナログビーム形成(ABF)技術を使っても良い。
【0036】
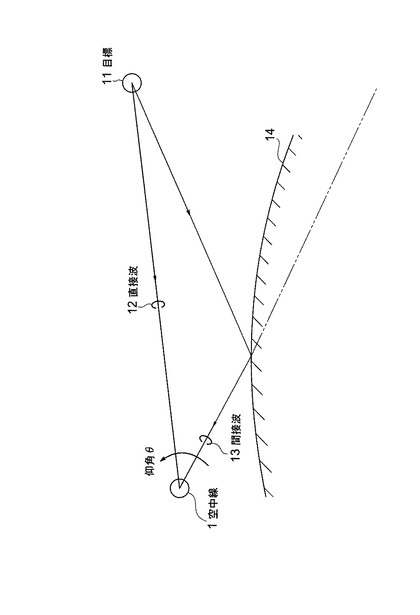
図4に示すように、直接波12は目標11から空中線1に直接到来し、間接波13は目標11から地面又は海面14を経て空中線1に到来する。
【0037】
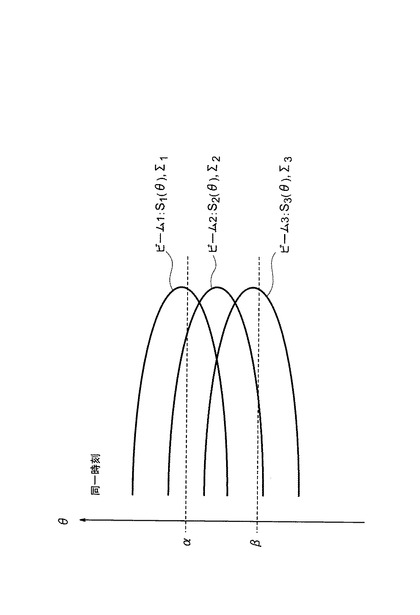
図3は受信ビーム形成の概念図を示す。図3では、例えば三本の受信ビームを、仰角θ方向に所定の間隔で形成した場合を示している。各受信ビームをそれぞれビーム1、ビーム2、ビーム3としたとき、算出される各受信ビームでの受信信号出力をそれぞれΣ1、Σ2、Σ3とする。また、n番目(n=1、2、3)の仰角θにおけるビームパターンを、仰角θの関数Sn(θ)とする。ここで、各ビームパターンS(θ)は既知であるとするが、その形状については特に指定はない。三本の受信ビームを同時に形成するため、直接波と間接波との相対位相差はどの受信ビームも同じであり、また、各ビームパターンが仰角に対して異なるので相対振幅比は受信ビームごとに異なる。よって、各受信ビームでの受信値Σ1〜Σ3はそれぞれ以下の式で表される。
【0038】
Σ1=Rt1e-jφ'[S1(α)+γS1(β)e-jφ] ・・・(1)
Σ2=Rt1e-jφ'[S2(α)+γS2(β)e-jφ] ・・・(2)
Σ3=Rt1e-jφ'[S3(α)+γS3(β)e-jφ] ・・・(3)
α:直接波の仰角
β:間接波の仰角
Rt1:直接波の振幅強度
φ’:直接波の絶対位相
γ:直接波に対する間接波の相対振幅比
φ:直接波に対する間接波の相対位相差
【0039】
図3の例では、受信ビームとして互いに仰角の異なる三本の同時マルチビームとし、ビーム形成器3で算出される受信信号出力をΣ1、Σ2、Σ3とした。しかし、必要に応じてモノパルスビームの形成演算を行い、Σ、Δ各ビームでの受信出力信号を算出することも可能である。
【0040】
目標信号検出器4は、ビーム形成器3で形成された各受信ビームの受信信号とあらかじめ設定された目標検出しきい値とを比較して、しきい値以上の受信信号を目標信号であると判定して目標信号を検出する。
【0041】
ビーム選択器6は、同時マルチビームの数が四本以上の場合に三本の受信ビーム及びその受信ビームにより算出された受信信号Σ1、Σ2、Σ3を選択し、測角処理器5に送る。複数の仰角の受信ビームで目標が検出された場合は、通常、最大値を検出した受信ビームとその上下の受信ビームを含めた三本を選択する。また、同時マルチビームの数が三本の場合は、それらの全ての受信ビーム及び受信信号Σ1、Σ2、Σ3を選択する。
【0042】
測角処理器5は、検出された目標に対して、測角演算を行って、直接波の仰角を算出する。ここで、測角処理器5は、図2に示す通り、第1仰角算出部51、第2仰角算出部52、パラメータ出力部53、間接波判定部54、直接波仰角抽出部55から構成される。
【0043】
第1仰角算出部51は、本発明の仰角推定方式に基づいて、マルチパス環境下における直接波仰角α及び間接波仰角βを算出する手段である。詳細については後述するが、第1仰角算出部51では、間接波の影響が無視できる場合に、直接波仰角αの推定が困難になる。
【0044】
一方、第2仰角算出部2は、目標からの反射波のうち間接波の影響が無視できる場合において、間接波が受信されずに直接波のみの場合を想定した測角方式に基づいて測角処理を行う。その処理方法としては、既存のモノパルス測角や振幅比較測角を用いることができる。
【0045】
パラメータ出力部53は、第1仰角算出部51及び第2仰角算出部52における計算に必要なパラメータを、それぞれの第1仰角算出部51及び第2仰角算出部52に出力する。第1仰角算出部51に対しては、与えられたθの値に対するビームパターンS1(θ)、S2(θ)、S3(θ)の値が出力される。これらの値は、あらかじめパラメータ出力部53に記憶されている、又はパラメータ出力部53にて算出される、ことにより出力可能となる。
【0046】
間接波判定部54は、第1仰角算出部51における算出結果から、直接波仰角αを求めるか否かを判定する。つまり、第1仰角算出部51にて仰角に関する解が二個(θ1、θ2)算出された場合は、その結果を直接波仰角抽出部55に出力する。一方、第1仰角算出部51にて解が二個算出されなかった場合は、第2仰角算出部52に進む。
【0047】
直接波仰角抽出部55は、第1仰角算出部51にて仰角に関する二個の解θ1、θ2が算出された場合、両者のうち大きい方を直接波仰角αとして出力する。
【0048】
次に、第1仰角算出部51について、図面を参照して詳細に説明する。図2における第1仰角算出部51は、ビーム対選択部511及び仰角探索部512から構成される。
【0049】
ビーム対選択部511は、ビーム選択器6にて選ばれた三個の受信ビームの中から、二個の受信ビームから形成されるビーム対を二組選択する。ここで、それぞれのビーム対を、ビーム1及びビーム2からなるビーム対1、ビーム2及びビーム3からなるビーム対2とする。なお、図3の例では低仰角方向に向かってビーム1、2、3としているが、ビーム番号の振り方は任意である。
【0050】
仰角探索部512は、二組のビーム対の受信値、及びパラメータ出力部53に記憶されているビームパターンS1(θ)、S2(θ)、S3(θ)を参照し、それぞれのビーム対から算出される以下の式(4)の値と式(5)の値とが等しくなるθを探索する。
【0051】
arg(Σ1−(S1(θ)/S2(θ))・Σ2) ・・・(4)
arg(Σ2−(S2(θ)/S3(θ))・Σ3) ・・・(5)
【0052】
式(4)は、ビーム対1について、ビームパターンS1(θ)とS2(θ)の商S1(θ)/S2(θ)からなる位相補正項を重みとした受信信号Σ2を、受信信号Σ1から差し引いた複素数の位相を求める計算となっている。同様に式(5)は、ビーム対2について、ビームパターンS2(θ)とS3(θ)の商S2(θ)/S3(θ)からなる位相補正項を重みとした受信信号Σ3を、受信信号Σ2から差し引いた複素数の位相を求める計算となっている。ただし、与えられたθに対して、S1(θ)/S2(θ)及びS2(θ)/S3(θ)の値が一意に決まるものとする。
【0053】
このとき、式(4)、(5)の括弧内は、式(1)〜(3)を代入して整理すると、それぞれ以下のように表される。
Σ1−(S1(θ)/S2(θ))・Σ2
=[S1(α)−(S1(θ)/S2(θ))・S2(α)]Rt1e-jφ'
+[S1(β)−(S1(θ)/S2(θ))・S2(β)]・Rt1γe-j(φ'+φ)
・・・(6)
Σ2−(S2(θ)/S3(θ))・Σ3
=[S2(α)−(S2(θ)/S3(θ))・S3(α)]Rt1e-jφ'
+[S2(β)−(S2(θ)/S3(θ))・S3(β)]・Rt1γe-j(φ'+φ)
・・・(7)
【0054】
ここで、θ=αにおいて、式(6)、(7)の位相の項がともにe-j(φ'+φ)となるため(∵右辺第1項=0)、両者の位相が等しくなる。同様にθ=βにおいても、式(6)、(7)の位相の項がともにe-jφ'となるため(∵右辺第2項=0)、両者の位相差は零又はπの整数倍に等しくなる。このことは、θが直接波仰角α又は間接波仰角βに等しいときには、式(4)の値と式(5)の値との差が零又はπの整数倍に等しくなることを意味する。
【0055】
直接波に対する間接波の相対振幅比γが零でない場合、式(4)の値と式(5)の値との差が零又はπの整数倍に等しくなるθを探索すると、解として二個求まる。探索された二つの解をそれぞれθ1、θ2とすると、それぞれ直接波仰角α、間接波仰角βのいずれかに相当することになる。ここで、図4に示したマルチパス環境下における直接波12と間接波13との角度関係から分かるように、θ1、θ2のうち大きい方が直接波仰角αに相当することから、直接波仰角αの推定が可能となる。つまり、間接波13の影響を受けている場合においては、仰角探索部512にて直接波仰角α及び間接波仰角βに相当するθ1、θ2を求められることを意味する。
【0056】
一方、γが零とみなせる場合、式(6)及び式(7)の右辺第2項がともに零となるため、θの値に関わらず式(4)と式(5)とが常に等しくなり、直接波仰角α又は間接波仰角βの推定が不可能となる。つまり、間接波の影響を受けていない場合は、仰角探索部512にて直接波仰角α又は間接波仰角βを測角することは不可となる。
【0057】
なお、式(4)と式(5)との差が零又はπの整数倍に等しくなるθの値を探索する実施形態としては、例えばθとして取り得る値の範囲を指定し、θの値を変化させながら式(6)の実部・虚部の比と、(7)の実部・虚部の比とを比較し、両者が同じ値となるθを探索する方法や、以下の式(8)が最小となるθの値を探索する方法がある。
【0058】
argmin|arg(Σ1−(S1(θ)/S2(θ))・Σ2)
−arg(Σ1−(S1(θ)/S3(θ))・Σ3)| ・・・(8)
【0059】
式(8)が最小になるθの値においては、式(6)と式(7)とから算出される値の差は零である。
【0060】
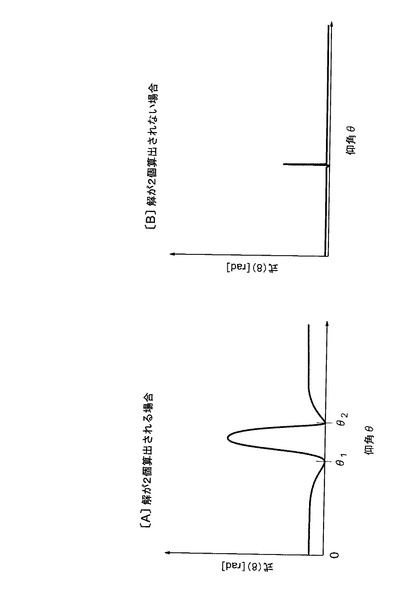
図5は式(8)の算出結果の例を示す図である。図5[A]の例のように解が二個求められた場合は、二つの解θ1、θ2が直接波仰角抽出部55に出力され、両者のうち大きい方が直接波仰角αとして出力される。一方、図5[B]の例のように解が二個求められなかった場合は、第2仰角算出部52に進む。なお、θの探索方法については特に制限はない。
【0061】
以上より、本実施形態1のレーダ装置10によれば、第1仰角算出部51を有する測角処理器5を用いたことにより、マルチパス環境下における直接波仰角の測角を短時間で高精度に行うことが可能となる。また、直接波のみの場合を想定した測角方式基づく第2仰角算出部52を組み合わせることにより、マルチパスの影響がない場合にも測角が可能となる。
【0062】
次に、本実施形態1の測角方法及び測角プログラムについて説明する。
【0063】
本実施形態1の測角方法は、本実施形態1の測角装置の動作を、方法の発明として捉えたものである。すなわち、本実施形態1の測角方法は、次のステップを有する。第1仰角算出部51が、受信信号に基づいて直接波仰角及び間接波仰角を算出するステップ。第2仰角算出部52が、受信信号に基づいて直接波仰角のみを算出するステップ。直接波仰角出力部50が、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力するステップ。
【0064】
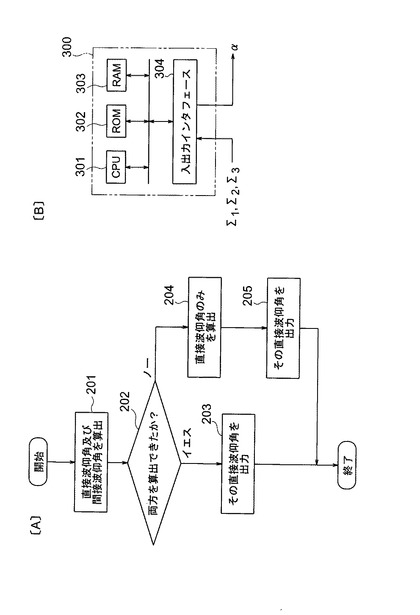
換言すると、図6[A]に示すように、受信信号に基づいて直接波仰角及び間接波仰角を算出し(ステップ201)、直接波仰角及び間接波仰角の両方が算出された否かを判定し(ステップ202)、直接波仰角及び間接波仰角の両方が算出されればその算出された直接波仰角を出力し(ステップ203)、直接波仰角及び間接波仰角の両方が算出されなければ、受信信号に基づいて直接波仰角のみを算出し(ステップ204)、その算出された直接波仰角を出力する(ステップ205)。
【0065】
本実施形態1の測角装置の各部を、コンピュータで実現してもよい。本実施形態1の測角プログラムは、本実施形態1の測角装置の各部としてコンピュータを機能させるものである。図6[B]に示すように、コンピュータ300は、CPU301、ROM302、RAM303及び入出力インタフェース304等を備える一般的なものでよい。すなわち、本実施形態1の測角プログラムは、受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出手段(第1仰角算出部51に相当)、受信信号に基づいて直接波仰角のみを算出する第2仰角算出手段(第2仰角算出部52に相当)、及び、第1仰角算出手段で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出手段で算出された直接波仰角を出力し、第1仰角算出手段で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出手段で算出された直接波仰角を出力する直接波仰角出力手段(直接波仰角出力部50に相当)、としてコンピュータ300を機能させるためのものである。
【0066】
CPU301は、ROM302又はRAM303から本測角プログラムを読み出し、解釈し、実行する。本測角プログラムは、非一時的な記録媒体(non-transitory storage medium)、例えば光ディスク、半導体メモリなどに記録されてもよい。その場合、本測角プログラムは、記録媒体からコンピュータ300によって読み出され、実行される。
【0067】
本実施形態1の測角方法及び測角プログラムは、本実施形態1の測角装置の他の構成、本実施形態1のレーダ装置の構成、又は後述する実施形態2のレーダ装置の構成に準じて、複雑にしてもよい。本実施形態1の測角方法及び測角プログラムによれば、本実施形態1の測角装置と同様の効果を奏する。
【0068】
<実施形態2>
実施形態1では、時分割せずに同時刻に形成された三本の受信ビームの中から選択された二組のビーム対を用いて、測角処理を行った。これに対し、本実施形態2では、同時に形成する受信ビームを二本とし、二本の受信ビームを二回に分けて形成することにより測角処理を行う。この場合でも、実施形態1同様にマルチパス環境下における直接波仰角の推定が可能となる。以下では、実施形態1とは異なる点について説明する。
【0069】
実施形態1は、少なくとも三本の受信ビームを同時に形成する必要があるため、DBFを採用することが前提となった。これに対し、本実施形態2は、同時に形成する受信ビームが二本で済むため、ABFでも容易に採用可能である。
【0070】
図7及び図8に示すように、本実施形態2のレーダ装置10a、10bは、異なる時刻に得られた受信信号を同じ時刻に得られた受信信号に変換する時刻差補正処理器7を、更に備えたことを特徴とする。図7は、本実施形態2においてDBFを採用した場合におけるレーダ装置10aを示すブロック図である。図1に示した実施形態1のレーダ装置を示すブロック図と比較すると、時刻差補正処理器7が新たに設けられていることが分かる。これらの動作については後述する。
【0071】
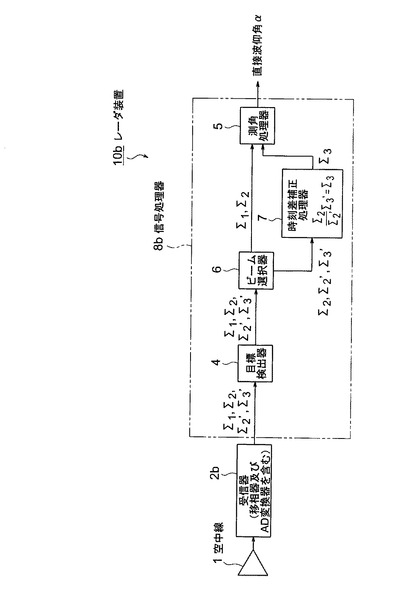
一方、ABFを採用した場合におけるレーダ装置10bを示すブロック図を、図8に示す。ABF採用時とDBF採用時とでは、目標検出及び測角処理を行う際に必要となる受信信号を得る方法が異なる。そのため、図8のレーダ装置10bでは、送受信器2bの構成が図7と異なり、信号処理器8b内のビーム形成器が不要となる点が図7と異なる。図8のレーダ装置10bのその他の構成については、図7に示したDBF採用時と同じである。
【0072】
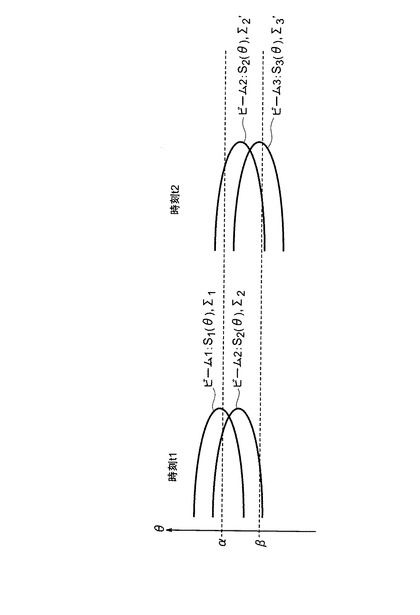
次に、実施形態2における動作について詳細に説明する。図9は受信ビームの概念図を示す。異なる時刻t1、t2にそれぞれ二本の受信ビームが仰角方向に所定の間隔で形成されている。このとき、時刻t1に形成された二本の受信ビームうちの一本と、時刻t2に形成された二本の受信ビームのうちの一本とは、同一のビーム形状で、かつ仰角方向も同じである。この受信ビームをビーム2とし、時刻t1に形成された残りの受信ビームをビーム1とし、時刻t2に形成された残りの受信ビームをビーム3とする。なお、ビーム1とビーム2の形状は異なるものとする。
【0073】
ここで、時刻t1においてビーム1により検出された受信信号をΣ1、ビーム2により検出された受信信号をΣ2とし、時刻t2においてビーム2により検出された受信信号をΣ2'、ビーム3により検出された受信信号をΣ3'とする。ただし、ダッシュ記号(’)の無い場合が時刻t1における受信信号を意味し、ダッシュ記号(’)の有る場合が時刻t2における受信信号を意味する。このとき、時刻t1、t2における直接波の信号強度及び絶対位相は異なるが、直接波と間接波との相対振幅比及び相対位相差は変化しないと考えられる。よって、各受信信号はそれぞれ以下の式で表される。
【0074】
Σ1=Rt1e-jφ't1[S1(α)+γS1(β)e-jφ] ・・・(9)
Σ2=Rt1e-jφ't1[S2(α)+γS2(β)e-jφ] ・・・(10)
Σ2'=Rt2e-jφ't2[S2(α)+γS2(β)e-jφ] ・・・(11)
Σ3'=Rt2e-jφ't2[S3(α)+γS3(β)e-jφ] ・・・(12)
α: 直接波の仰角
β: 間接波の仰角
Rt1: 時刻t1における直接波の振幅強度
Rt2: 時刻t2における直接波の振幅強度
φ't1: 時刻t1における直接波の絶対位相
φ't2: 時刻t2における直接波の絶対位相
γ: 直接波に対する間接波の相対振幅比
φ: 直接波に対する間接波の相対位相差
【0075】
本実施形態2において、測角処理に必要な受信信号が目標検出器4に送られる。測角処理に必要な受信信号としては、上記Σ1、Σ2、Σ2'、Σ3'が最低限含まれる。また、第2仰角算出部52においてモノパルス方式を採用する場合は、モノパルスビーム形成処理により得られたΣ、Δ各ビームでの受信信号が更に含まれる。目標検出器4にて目標が検出された場合には、受信信号をビーム選択器6に出力する。
【0076】
ここで、測角処理器5にて測角処理を行うためには、同時刻に三本の受信ビームにより検出される受信信号が必要となる。そこで、ビーム選択器6及び時刻差補正処理器7により、時刻t1においてビーム3により検出される受信信号Σ3を算出する。
【0077】
ビーム選択器6は、受信信号Σ3を算出する上で必要となるΣ2、Σ2'、Σ3'を選択し、時刻差補正処理器7に送り、またΣ1、Σ2を測角処理器5へ送る。
【0078】
時刻差補正処理器7では以下の演算を行う。
(Σ2/Σ2')・Σ3'
=(Rt1e-jφ't1/Rt2e-jφ't2)・Rt2e-jφ't2[S3(α)+γS3(β)e-jφ]
=Rt1e-jφ't1[S3(α)+γS3(β)e-jφ] ・・・(13)
【0079】
ここで、式(13)の右辺のφ't1をφ'と書き直すと式(3)の右辺と一致することから、式(13)の右辺は、時刻t1においてビーム3により検出した場合に得られると考えられる受信信号Σ3であることが分かる。つまり、時刻差補正処理器7では受信信号Σ2、Σ2'、Σ3'から、時刻t1においてビーム3により検出される受信信号Σ3を算出していることになる。この算出された受信信号Σ3は測角処理器5に送られる。
【0080】
これにより、測角処理器5には、同時刻t1おいて3つの受信ビームにより得られた受信信号Σ1、Σ2、Σ3が送られることになる。詳細には、受信信号Σ1、Σ2、Σ3は、図2に示した測角処理器5内の第1仰角算出部51に送られる。以降の処理は、実施形態1に記載した処理と同じである。
【0081】
以上より、ビーム選択器6及び時刻差補正処理器7を設けることにより、二本の受信ビームを二回に分けて形成した場合でも実施形態1と同等の精度でマルチパス環境下における測角処理を行うことが可能となる。また、本実施形態2では、ABFでも容易に採用できるため、装置に掛かるコストを低減することが可能となる。
【0082】
次に、本発明の効果について総括する。(1)第1仰角算出部にて直接波のみならず間接波も考慮した上で直接波仰角を解析的に算出することにより、マルチパス環境下において高精度な測角が可能となる。(2)第1仰角算出部に加えて、直接波のみの場合を想定した測角処理を行う第2仰角算出部も併用しているため、マルチパスの影響の有無に関わらず測角が可能となる。(3)1回のスキャン内で連続して放射するビームからの反射波を利用していることから、短時間での測角が可能となる。(4)三本以上の受信ビームが形成可能なビーム形成器を構成することにより、より高精度な測角が可能となる。(5)時刻差補正処理器を設けることにより、受信ビーム数を二本として、二回に分けて走査して受信ビームを形成した場合においても測角が可能となり、ABF(アナログビーム形成)手法に基づき受信ビーム形成器を構成することにより、ハードウェアに掛かるコストを低減することが可能となる。
【0083】
以上、上記各実施形態を参照して本発明を説明したが、本発明は上記各実施形態に限定されるものではない。本発明の構成や詳細については、当業者が理解し得るさまざまな変更を加えることができる。また、本発明には、上記各実施形態の構成の一部又は全部を相互に適宜組み合わせたものも含まれる。
【0084】
上記の実施形態の一部又は全部は以下の付記のようにも記載され得るが、本発明は以下の構成に限定されるものではない。
【0085】
[付記1]受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出部と、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出部と、
前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する直接波仰角出力部と、
を備えたことを特徴とする測角装置。
【0086】
[付記2]付記1記載の測角装置であって、
三本の受信ビームをビーム1、ビーム2、ビーム3とし、
前記ビーム1についての前記受信信号を受信信号1とし、
前記ビーム2についての前記受信信号を受信信号2とし、
前記ビーム3についての前記受信信号を受信信号3とし、
前記受信信号1が仰角の関数であるビームパターン1を含むとし、
前記受信信号2が仰角の関数であるビームパターン2を含むとし、
前記受信信号3が仰角の関数であるビームパターン3を含むとしたとき、
前記第1仰角算出部は、ビーム対選択部及び仰角探索部を有し、
前記ビーム対選択部は、前記三本の受信ビームの中から前記ビーム1及び前記ビーム2からなるビーム対1と前記ビーム2及び前記ビーム3からなるビーム対2とを選択し、
前記仰角探索部は、前記ビーム対1について、前記ビームパターン1と前記ビームパターン2との商からなる位相補正項を重みとした前記受信信号2を、前記受信信号1から差し引いた複素数の位相を算出し、前記ビーム対2について、ビームパターン2とビームパターン3との商からなる位相補正項を重みとした前記受信信号3を、前記受信信号2から差し引いた複素数の位相を算出し、両者の位相の差が零又は180度の整数倍に等しくなる条件を満たす仰角を探索する、
ことを特徴とする測角装置。
【0087】
[付記3]付記2記載の測角装置であって、
前記直接波仰角出力部は、間接波判定部及び直接波仰角抽出部を有し、
前記間接波判定部は、前記第1仰角算出部にて前記条件を満たす仰角が二個求められた場合は、前記第1仰角算出部による算出結果を用いる判定をし、前記第1仰角算出部にて前記条件を満たす仰角が二個求められなかった場合は、前記第2仰角算出部による算出結果を用いる判定をし、
前記直接波仰角抽出部は、前記間接波判定部が前記第1仰角算出部による算出結果を用いる判定をしたときは、前記条件を満たす二個の仰角のうち大きい方を前記直接波仰角として出力し、
前記第2仰角算出部は、前記間接波判定部が当該第2仰角算出部による算出結果を用いる判定をしたときは、当該第2仰角算出部による算出結果を前記直接波仰角として出力する、
ことを特徴とする測角装置。
【0088】
[付記4]付記1乃至3のいずれか一つに記載の測角装置であって、
前記算出に必要なパラメータを前記第1仰角算出部及び前記第2仰角算出部へ出力するパラメータ出力部を、
更に備えたことを特徴とする測角装置。
【0089】
[付記5]レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線と、
高周波信号を前記空中線に出力するともに前記空中線で受信された信号を検波する送受信器と、
前記送受信器による受信処理後の信号から複数の受信ビームを形成するとともに、形成した各受信ビームでの受信信号を抽出するビーム形成器と、
前記ビーム形成器で形成された各ビームでの受信信号に基づいて目標を検出する目標検出器と、
前記目標検出器で前記目標が検出された場合に前記ビーム形成器で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器と、
前記選択された受信ビーム及び当該受信ビームにより算出された受信信号に基づいて測角処理を行う付記1乃至4のいずれか一つに記載の測角装置と、
を備えたことを特徴とするレーダ装置。
【0090】
[付記6]付記5記載のレーダ装置であって、
前記ビーム形成器は、測角処理に必要な受信信号を全て同時刻に形成し、前記第1仰角算出部における処理に必要となる三本以上の受信ビーム及び第2仰角算出部における処理に必要となる受信ビームを形成し、
前記ビーム選択器は、前記第1仰角算出部における処理に必要となる三本の受信ビームを選択する、
ことを特徴とするレーダ装置。
【0091】
[付記7]付記5記載のレーダ装置であって、
異なる時刻に得られた受信信号を同じ時刻に得られた受信信号に変換する時刻差補正処理器を更に備えた、
ことを特徴とするレーダ装置。
【0092】
[付記8]第1仰角算出部が、受信信号に基づいて直接波仰角及び間接波仰角を算出し、
第2仰角算出部が、前記受信信号に基づいて前記直接波仰角のみを算出し、
直接波仰角出力部が、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する、
ことを特徴とする測角方法。
【0093】
[付記9]受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出手段、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出手段、及び、
前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出手段で算出された前記直接波仰角を出力し、前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出手段で算出された前記直接波仰角を出力する直接波仰角出力手段、
としてコンピュータを機能させるための測角プログラム。
【0094】
[付記11]同時刻に異なる三本のビームにより求められた受信信号を用いてマルチパス環境下における直接波仰角及び間接波仰角を算出する第1仰角算出部と、
直接波のみの場合を想定した測角処理を行う第2仰角算出部と、
前記第1仰角算出部及び前記第2仰角算出部における計算に必要なパラメータをそれぞれの前記第1仰角算出部及び前記第2仰角算出部に出力するパラメータ出力部と、
前記直接波仰角を推定する際に前記第1仰角算出部における算出結果を用いる否かを判定する間接波判定部と、
前記第1仰角算出部における算出結果を用いて前記直接波仰角を求める直接波仰角抽出部とを備え、
前記第1仰角算出部は、
受信信号を求める際に用いられた三本の異なる複数ビームの中からビーム1及びビーム2からなるビーム対1と、ビーム2及びビーム3からなるビーム対2との計二組のビーム対を選択するビーム対選択部と、
仰角をパラメータとして、ビームパターン1とビームパターン2の商からなる位相補正項を重みとした受信信号2を、受信信号1から差し引いた複素数の位相、及び、ビームパターン1とビームパターン3の商からなる位相補正項を重みとした受信信号3を、受信信号1から差し引いた複素数の位相を算出し、両者の位相差が零又は180度の整数倍に等しくなる仰角を探索する仰角探索部とを有し、
前記第1仰角算出部にて上記条件を満たす仰角が二個求められた場合は、前記間接波判定部にて前記第1仰角算出部における算出結果を用いる判定をし、前記直接波仰角抽出部にて仰角に関する二個の解のうち、値の大きい方を直接波仰角として出力し、
前記第1仰角算出部にて上記条件を満たす仰角が二個求められなかった場合は、前記間接波判定部にて前記第2仰角算出部における算出結果を用いる判定をし、前記第2仰角算出部にて直接波仰角を算出し、その値を直接波仰角として出力する、
ことを特徴とする測角装置。
【0095】
[付記12]レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線と、
高周波信号を空中線に出力するともに空中線より送られた受信信号を検波し、受信処理後の信号からマルチビームを形成し、形成した各ビームでのディジタル受信信号を抽出する受信信号処理部と、
前記受信処理部で形成された各ビームでの受信信号をもとに目標検出を行う目標信号検出器と、
目標が検出された場合に前記ビーム形成器で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器と、
前記選択された受信ビーム及び前記受信ビームにより算出された受信信号をもとに測角処理を行う付記11に記載の測角装置と、
を備えたことを特徴とするレーダ装置。
【0096】
[付記13]付記12記載のレーダ装置において、
測角処理に必要な受信信号を全て同時刻に形成し、
前記第1仰角算出部における処理で必要となる三本以上の受信ビーム及び前記第2仰角算出部における処理で必要となるビームを前記受信ビーム形成器にて形成するとともに、
前記ビーム選択器として、前記第1仰角算出部での処理において必要となる三本のマルチビームを選択するビーム選択器を有すること
を特徴とするレーダ装置。
【0097】
[付記14]付記12記載のレーダ装置において、
同時に形成する受信ビーム数を二本とし、二回に分けて走査してビーム一本分をオーバーラップさせて受信ビームを形成し、
前記ビーム選択器内で異なる時刻に得られた受信信号から、同時刻に受信した信号に変換する時刻差補正処理器を更に備え、
異なる時刻の同一受信ビームパターンにより得られた受信信号を基に時刻差補正処理がなされる、
ことを特徴とするレーダ装置。
【産業上の利用可能性】
【0098】
本発明は、地面や海面等からの反射波があるマルチパス環境下で目標の仰角情報を検出する測角技術、例えば目標を検出するレーダ装置等に利用可能である。
【符号の説明】
【0099】
1 空中線
2、2b 送受信器
3 ビーム形成器
4 目標検出器
5 測角処理器(測角装置)
6 ビーム選択器
7 時刻差補正処理器
8、8a、8b 信号処理器
10、10a、10b レーダ装置
11 目標
12 直接波
13 間接波
14 地面又は海面
50 直接波仰角出力部
51 第1仰角算出部
52 第2仰角算出部
53 パラメータ出力部
54 間接波判定部
55 直接波仰角抽出部
511 ビーム対選択部
512 仰角探索部
100 Δ/Σが複素平面上で描く円軌跡
101a、101b、101c、101d、101e、101f 観測値
102 複素除算手段
103 第1の円中心演算手段
104 角度変換手段
300 コンピュータ
301 CPU
302 ROM
303 RAM
304 入出力インタフェース
【技術分野】
【0001】
本発明は、目標を検出するレーダ装置等に関し、特に地面や海面等からの反射波があるマルチパス環境下で目標の仰角情報を検出する測角技術に関するものである。
【背景技術】
【0002】
レーダ装置は、一般に空間に電波を発射して、目標からの反射信号を受信することにより、目標の存在を探知し、その位置や運動状況などを観測するものである。レーダ装置において、電波(送信ビーム)は、空中線から空間に発射され、目標に当たって反射した後、再び空中線で受けられ、受信器等へレーダ受信信号として出力される。そして、レーダ受信信号を所定のサンプリング間隔でA/D変換し、サンプリング点毎のディジタル受信信号の振幅値をしきい値と比較し、しきい値以上のディジタル受信信号を目標信号と判定することにより、目標信号を検出する。測距処理では、電波を発射した時刻と目標信号を検出した時刻との差分に基づいて、目標の距離情報を得る。この目標の探知と距離情報の測定とが、レーダ装置の基本機能であり最も簡単な構成である。
【0003】
送信ビームの方位を変化させ、方位の異なるレーダ受信信号を得て、方位測角処理を行うことにより、目標の方位情報を得ることができる。更に、仰角の異なる複数の送信ビームを発射し、同じ目標から反射信号を受信し、仰角の異なる受信信号の振幅差や位相差を使って仰角測角処理を行うことによって、目標の高度情報を得ることができる。
【0004】
観測したい空間に一通り電波発射することを、スキャンと呼ぶ。レーダ装置は、スキャンの動作を繰り返し行うことで、目標情報を所定の間隔で連続して取得することができる。代表的な仰角方向の測角方式として、例えば振幅比較方式やモノパルス方式が知られている。
【0005】
振幅比較方式の場合、仰角方向に連続して設定した複数のビームで目標を検出し、最も受信強度の大きいビームを用いて測角値を求めている。マルチパス対策として、受信ビームの指向中心を上方にずらして設定(オフボア)した振幅比較方式が利用されている。この方式により、地面や海面からの反射波の影響を軽減する。
【0006】
一方、モノパルス方式は、和差除算信号Δ/Σが仰角θに対して一定の特性曲線を描く関係となることを利用して、直接波の到来角を求めている。
【0007】
マルチパスの影響が無視できる環境下では、モノパルス方式を用いることにより、振幅比較測角方式を用いた場合に比べ高精度のデータを得ることができる。しかしながら、モノパルス方式を用いた場合、マルチパス環境下では測角精度が劣化することが知られている(非特許文献1)。これは、モノパルス方式でのビーム形状において、差ビームの形状が間接波を受信しやすいことに由来する。つまり、マルチパス環境下における低仰角目標に対しては、目標からの直接波に加え、地面や海面等に反射して別の経路を伝播した間接波も到来するため、受信信号の和信号と差信号との複素除算結果であるΔ/Σが、直接波のみの場合のΔ/Σと異なる値として観測されるからである。
【0008】
実際、マルチパス環境下では、観測期間中において、(1)目標が低仰角で遠距離を移動していることにより目標の移動に伴う仰角の変化が無視でき、(2)直接波とマルチパス間接波との相対振幅比の変化が小さく、(3)直接波と間接波との相対位相差φの変動が大きくなる、という条件下では、図10[A]に示す通りΔ/Σが複素平面上で円軌跡100を描く(非特許文献1)。
【0009】
これに対して、マルチパス環境下においてモノパルス方式により高精度な測角を実現する手段として、特許文献1で示された技術がある。その概略的な構成図を図10[B]に示す。第1の円中心演算手段103及び角度変換手段104を有する点が、この技術の特徴である。第1の円中心演算手段103は、複素除算手段102にて算出されたΔ/Σを基に、Δ/Σが複素平面上で描く円軌跡100の半径と中心座標を算出する。角度変換手段104は、第1の円中心演算手段103で得られた半径と中心座標から、直接波の到来角を算出する。
【0010】
ここで、マルチパス環境下において高精度な測角を行うためには、図10[A]に示す円軌跡100を精度良く求める必要がある。そのため、特許文献1では、ある間隔で同一周波数の電波を送信し3回以上観測し、複素平面上で異なる三個以上のΔ/Σの座標を求める方法が示されている。この方法は、目標が動いている場合、目標との距離が変化して直接波と間接波の相対位相差φが変化することを利用している。各観測の時間間隔をある程度保つことにより、複素平面上の観測点は、図10[A]における観測点101a、101b、101cの例が示す通り互いに離れた位置関係でプロットされるため、これらの観測点の座標から円軌跡100を高精度に求めることが可能となる。ただし、各観測の時間間隔が短くなると、図10[A]における複素平面上の観測点101d、101e、101fの例のように各点が接近してしまうため、円軌跡100を正確に求めることが困難になる。よって、円軌跡を精度良く求めるためには、観測中に目標がある程度移動している必要があり、実用上複数スキャンにわたる観測が必要になる。
【0011】
なお、マルチパスの影響を排除するその他の関連技術が、特許文献2、3等に開示されている。
【先行技術文献】
【特許文献】
【0012】
【特許文献1】特許第3353991号公報
【特許文献2】特開2010−85283号公報
【特許文献1】特開平11−118919号公報
【非特許文献】
【0013】
【非特許文献1】Samuel M.Sherman;“Monopulse Principles and Techniques” , Artech House, Inc. 1983
【発明の概要】
【発明が解決しようとする課題】
【0014】
地面又は海面からの反射波があるマルチパス環境下において、振幅比較方式のうちオフボア方式を採用した場合、オフボアすると、対象とする目標からの受信信号も弱くなってしまい、目標検出自体が困難になるという問題がある。
【0015】
一方、モノパルス方式を用いた特許文献1の方式においては、複素平面上で異なるΔ/Σの座標を求める必要がある。このとき、同一周波数の同一ΣΔビームを複数回放射するため、実用上複数スキャンにわたる観測が必要となり、観測時間が長くなるという問題がある。
【0016】
本発明の目的は、上述した技術の問題点を解決することであり、マルチパス環境下において、短時間でより精度の高い仰角推定を可能とする測角装置等を得ることである。
【課題を解決するための手段】
【0017】
本発明に係る測角装置は、
受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出部と、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出部と、
前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する直接波仰角出力部と、
を備えたことを特徴とする。
【0018】
本発明に係るレーダ装置は、
レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線と、
高周波信号を前記空中線に出力するともに前記空中線で受信された信号を検波する送受信器と、
前記送受信器による受信処理後の信号から複数の受信ビームを形成するとともに、形成した各受信ビームでの受信信号を抽出するビーム形成器と、
前記ビーム形成器で形成された各ビームでの受信信号に基づいて目標を検出する目標検出器と、
前記目標検出器で前記目標が検出された場合に前記ビーム形成器で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器と、
前記選択された受信ビーム及び当該受信ビームにより算出された受信信号に基づいて測角処理を行う本発明に係る測角装置と、
を備えたことを特徴とする。
【0019】
本発明に係る測角方法は、
第1仰角算出部が、受信信号に基づいて直接波仰角及び間接波仰角を算出し、
第2仰角算出部が、前記受信信号に基づいて前記直接波仰角のみを算出し、
直接波仰角出力部が、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する、
ことを特徴とする。
【0020】
本発明に係る測角プログラムは、
受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出手段、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出手段、及び、
前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出手段で算出された前記直接波仰角を出力し、前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出手段で算出された前記直接波仰角を出力する直接波仰角出力手段、
としてコンピュータを機能させるためのものである。
【発明の効果】
【0021】
本発明によれば、直接波のみならず間接波も考慮した上で直接波仰角を算出することにより、マルチパス環境下において短時間で高精度な測角が可能となる。これに加え、直接波のみの場合を想定した測角処理も併用しているため、マルチパスの影響の有無に関わらず測角が可能となる。
【図面の簡単な説明】
【0022】
【図1】実施形態1のレーダ装置を示すブロック図である。
【図2】図1における測角処理器(実施形態1の測角装置)を示すブロック図である。
【図3】実施形態1において形成される受信ビームを示すグラフである。
【図4】マルチパス環境を模式的に示す説明図である。
【図5】式(8)の算出結果を示すグラフであり、図5[A]は解が二個求められた場合の一例を示すグラフであり、図5[B]は解が二個求められなかった場合の一例を示すグラフである。
【図6】図6[A]は実施形態1の測角方法の一例を示すフローチャートであり、図6[B]は実施形態1の測角プログラムを実行するコンピュータの一例を示すブロック図である。
【図7】実施形態2のレーダ装置の第一例(DBFを採用した場合)を示すブロック図である。
【図8】実施形態2のレーダ装置の第二例(ABFを採用した場合)を示すブロック図である。
【図9】実施形態2において形成される受信ビームを示すグラフである。
【図10】図10[A]はマルチパス環境下においてΔ/Σが複素平面上で円軌跡を描く様子を示すグラフであり、図10[B]は特許文献1記載の測角装置を示すブロック図である。
【発明を実施するための形態】
【0023】
以下、上述の問題を解決した本発明の実施形態について、図面を参照して詳細に説明する。すべての図面において、同様な構成要素には同様の符号を付す。
【0024】
<実施形態1>
図1は、実施形態1のレーダ装置を示すブロック図である。図2は、図1における測角処理器を示すブロック図である。以下、これらの図面に基づき説明する。本実施形態1は、レーダ装置の他、測角装置、測角方法及び測角プログラムの実施形態も含む。
【0025】
本実施形態1の測角装置としての測角処理器5は、第1仰角算出部51、第2仰角算出部52及び直接波仰角出力部50を備えたことを特徴とする。第1仰角算出部51は、受信信号に基づいて直接波仰角及び間接波仰角を算出する。第2仰角算出部52は、受信信号に基づいて直接波仰角のみを算出する。直接波仰角出力部50は、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力する。
【0026】
ここで、三本の受信ビームをビーム1、ビーム2、ビーム3とし、ビーム1についての受信信号を受信信号1とし、ビーム2についての受信信号を受信信号2とし、ビーム3についての受信信号を受信信号3とする。かつ、受信信号1が仰角の関数であるビームパターン1を含むとし、受信信号2が仰角の関数であるビームパターン2を含むとし、受信信号3が仰角の関数であるビームパターン3を含むとする。
【0027】
このとき、第1仰角算出部51は、ビーム対選択部511及び仰角探索部512を有する、としてもよい。ビーム対選択部551は、三本の受信ビームの中から、ビーム1及びビーム2からなるビーム対1と、ビーム2及びビーム3からなるビーム対2とを選択する。仰角探索部512は、ビーム対1について、ビームパターン1とビームパターン2との商からなる位相補正項を重みとした受信信号2を、受信信号1から差し引いた複素数の位相を算出し、ビーム対2について、ビームパターン2とビームパターン3との商からなる位相補正項を重みとした受信信号3を、受信信号2から差し引いた複素数の位相を算出し、両者の位相の差が零又は180度の整数倍に等しくなる条件を満たす仰角を探索する。
【0028】
直接波仰角出力部50は、間接波判定部54及び直接波仰角抽出部55を有する、としてもよい。間接波判定部54は、第1仰角算出部51にて前記条件を満たす仰角が二個求められた場合は、第1仰角算出部51による算出結果を用いる判定をし、第1仰角算出部51にて前記条件を満たす仰角が二個求められなかった場合は、第2仰角算出部52による算出結果を用いる判定をする。直接波仰角抽出部55は、間接波判定部54が第1仰角算出部51による算出結果を用いる判定をしたときは、前記条件を満たす二個の仰角のうち大きい方を直接波仰角として出力する。第2仰角算出部52は、間接波判定部54が第2仰角算出部52による算出結果を用いる判定をしたときは、第2仰角算出部52による算出結果を直接波仰角として出力する。
【0029】
測角処理器5は、パラメータ出力部53を更に備えてもよい。パラメータ出力部53は、前記算出に必要なパラメータを第1仰角算出部51及び第2仰角算出部52へ出力する。なお、パラメータ出力部53を省略して、パラメータ出力部53の機能を第1仰角算出部51及び第2仰角算出部52のそれぞれに持たせてもよい。
【0030】
本実施形態1のレーダ装置10は、レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線1と、高周波信号を空中線1に出力するともに空中線1で受信された信号を検波する送受信器2と、送受信器2による受信処理後の信号から複数の受信ビームを形成するとともに、形成した各受信ビームでの受信信号を抽出するビーム形成器3と、ビーム形成器3で形成された各ビームでの受信信号に基づいて目標を検出する目標検出器4と、目標検出器4で前記目標が検出された場合にビーム形成器3で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器6と、前記選択された受信ビーム及び当該受信ビームにより算出された受信信号に基づいて測角処理を行う測角処理器5と、を備えている。
【0031】
ビーム形成器3は、測角処理に必要な受信信号を全て同時刻に形成し、第1仰角算出部51における処理に必要となる三本以上の受信ビーム及び第2仰角算出部52における処理に必要となる受信ビームを形成する、としてもよい。ビーム選択器6は、第1仰角算出部51における処理に必要となる三本の受信ビームを選択する、としてもよい。
【0032】
以下、本実施形態1について更に詳しく説明する。
【0033】
本実施形態1のレーダ装置10は、空中線1、送受信器2、ビーム形成器3、目標信号検出器4、ビーム選択器6、及び、測角装置としての測角処理器5を備えている。ビーム形成器3、目標信号検出器4、ビーム選択器6及び測角処理器5は、信号処理器8を構成している。
【0034】
送受信器2は、高周波信号を空中線1へ出力する。すると、空中線1は、高周波信号を空中の所定の方向に向けて放射するとともに、目標から反射された電波を受信し、受信した高周波信号を送受信器2へ出力する。送受信器2は、空中線1より送られた受信信号を検波し、A/D変換してディジタル受信信号としてビーム形成器3に送る。
【0035】
ビーム形成器3は、送受信器2から送られてくる複数のディジタル受信信号に基づいて、三本以上の受信ビームを同時に形成するとともに、形成した各受信ビームでの受信信号を算出する。受信ビームの形成には、通常、ディジタルビーム形成(DBF)技術が使われるが、アナログビーム形成(ABF)技術を使っても良い。
【0036】
図4に示すように、直接波12は目標11から空中線1に直接到来し、間接波13は目標11から地面又は海面14を経て空中線1に到来する。
【0037】
図3は受信ビーム形成の概念図を示す。図3では、例えば三本の受信ビームを、仰角θ方向に所定の間隔で形成した場合を示している。各受信ビームをそれぞれビーム1、ビーム2、ビーム3としたとき、算出される各受信ビームでの受信信号出力をそれぞれΣ1、Σ2、Σ3とする。また、n番目(n=1、2、3)の仰角θにおけるビームパターンを、仰角θの関数Sn(θ)とする。ここで、各ビームパターンS(θ)は既知であるとするが、その形状については特に指定はない。三本の受信ビームを同時に形成するため、直接波と間接波との相対位相差はどの受信ビームも同じであり、また、各ビームパターンが仰角に対して異なるので相対振幅比は受信ビームごとに異なる。よって、各受信ビームでの受信値Σ1〜Σ3はそれぞれ以下の式で表される。
【0038】
Σ1=Rt1e-jφ'[S1(α)+γS1(β)e-jφ] ・・・(1)
Σ2=Rt1e-jφ'[S2(α)+γS2(β)e-jφ] ・・・(2)
Σ3=Rt1e-jφ'[S3(α)+γS3(β)e-jφ] ・・・(3)
α:直接波の仰角
β:間接波の仰角
Rt1:直接波の振幅強度
φ’:直接波の絶対位相
γ:直接波に対する間接波の相対振幅比
φ:直接波に対する間接波の相対位相差
【0039】
図3の例では、受信ビームとして互いに仰角の異なる三本の同時マルチビームとし、ビーム形成器3で算出される受信信号出力をΣ1、Σ2、Σ3とした。しかし、必要に応じてモノパルスビームの形成演算を行い、Σ、Δ各ビームでの受信出力信号を算出することも可能である。
【0040】
目標信号検出器4は、ビーム形成器3で形成された各受信ビームの受信信号とあらかじめ設定された目標検出しきい値とを比較して、しきい値以上の受信信号を目標信号であると判定して目標信号を検出する。
【0041】
ビーム選択器6は、同時マルチビームの数が四本以上の場合に三本の受信ビーム及びその受信ビームにより算出された受信信号Σ1、Σ2、Σ3を選択し、測角処理器5に送る。複数の仰角の受信ビームで目標が検出された場合は、通常、最大値を検出した受信ビームとその上下の受信ビームを含めた三本を選択する。また、同時マルチビームの数が三本の場合は、それらの全ての受信ビーム及び受信信号Σ1、Σ2、Σ3を選択する。
【0042】
測角処理器5は、検出された目標に対して、測角演算を行って、直接波の仰角を算出する。ここで、測角処理器5は、図2に示す通り、第1仰角算出部51、第2仰角算出部52、パラメータ出力部53、間接波判定部54、直接波仰角抽出部55から構成される。
【0043】
第1仰角算出部51は、本発明の仰角推定方式に基づいて、マルチパス環境下における直接波仰角α及び間接波仰角βを算出する手段である。詳細については後述するが、第1仰角算出部51では、間接波の影響が無視できる場合に、直接波仰角αの推定が困難になる。
【0044】
一方、第2仰角算出部2は、目標からの反射波のうち間接波の影響が無視できる場合において、間接波が受信されずに直接波のみの場合を想定した測角方式に基づいて測角処理を行う。その処理方法としては、既存のモノパルス測角や振幅比較測角を用いることができる。
【0045】
パラメータ出力部53は、第1仰角算出部51及び第2仰角算出部52における計算に必要なパラメータを、それぞれの第1仰角算出部51及び第2仰角算出部52に出力する。第1仰角算出部51に対しては、与えられたθの値に対するビームパターンS1(θ)、S2(θ)、S3(θ)の値が出力される。これらの値は、あらかじめパラメータ出力部53に記憶されている、又はパラメータ出力部53にて算出される、ことにより出力可能となる。
【0046】
間接波判定部54は、第1仰角算出部51における算出結果から、直接波仰角αを求めるか否かを判定する。つまり、第1仰角算出部51にて仰角に関する解が二個(θ1、θ2)算出された場合は、その結果を直接波仰角抽出部55に出力する。一方、第1仰角算出部51にて解が二個算出されなかった場合は、第2仰角算出部52に進む。
【0047】
直接波仰角抽出部55は、第1仰角算出部51にて仰角に関する二個の解θ1、θ2が算出された場合、両者のうち大きい方を直接波仰角αとして出力する。
【0048】
次に、第1仰角算出部51について、図面を参照して詳細に説明する。図2における第1仰角算出部51は、ビーム対選択部511及び仰角探索部512から構成される。
【0049】
ビーム対選択部511は、ビーム選択器6にて選ばれた三個の受信ビームの中から、二個の受信ビームから形成されるビーム対を二組選択する。ここで、それぞれのビーム対を、ビーム1及びビーム2からなるビーム対1、ビーム2及びビーム3からなるビーム対2とする。なお、図3の例では低仰角方向に向かってビーム1、2、3としているが、ビーム番号の振り方は任意である。
【0050】
仰角探索部512は、二組のビーム対の受信値、及びパラメータ出力部53に記憶されているビームパターンS1(θ)、S2(θ)、S3(θ)を参照し、それぞれのビーム対から算出される以下の式(4)の値と式(5)の値とが等しくなるθを探索する。
【0051】
arg(Σ1−(S1(θ)/S2(θ))・Σ2) ・・・(4)
arg(Σ2−(S2(θ)/S3(θ))・Σ3) ・・・(5)
【0052】
式(4)は、ビーム対1について、ビームパターンS1(θ)とS2(θ)の商S1(θ)/S2(θ)からなる位相補正項を重みとした受信信号Σ2を、受信信号Σ1から差し引いた複素数の位相を求める計算となっている。同様に式(5)は、ビーム対2について、ビームパターンS2(θ)とS3(θ)の商S2(θ)/S3(θ)からなる位相補正項を重みとした受信信号Σ3を、受信信号Σ2から差し引いた複素数の位相を求める計算となっている。ただし、与えられたθに対して、S1(θ)/S2(θ)及びS2(θ)/S3(θ)の値が一意に決まるものとする。
【0053】
このとき、式(4)、(5)の括弧内は、式(1)〜(3)を代入して整理すると、それぞれ以下のように表される。
Σ1−(S1(θ)/S2(θ))・Σ2
=[S1(α)−(S1(θ)/S2(θ))・S2(α)]Rt1e-jφ'
+[S1(β)−(S1(θ)/S2(θ))・S2(β)]・Rt1γe-j(φ'+φ)
・・・(6)
Σ2−(S2(θ)/S3(θ))・Σ3
=[S2(α)−(S2(θ)/S3(θ))・S3(α)]Rt1e-jφ'
+[S2(β)−(S2(θ)/S3(θ))・S3(β)]・Rt1γe-j(φ'+φ)
・・・(7)
【0054】
ここで、θ=αにおいて、式(6)、(7)の位相の項がともにe-j(φ'+φ)となるため(∵右辺第1項=0)、両者の位相が等しくなる。同様にθ=βにおいても、式(6)、(7)の位相の項がともにe-jφ'となるため(∵右辺第2項=0)、両者の位相差は零又はπの整数倍に等しくなる。このことは、θが直接波仰角α又は間接波仰角βに等しいときには、式(4)の値と式(5)の値との差が零又はπの整数倍に等しくなることを意味する。
【0055】
直接波に対する間接波の相対振幅比γが零でない場合、式(4)の値と式(5)の値との差が零又はπの整数倍に等しくなるθを探索すると、解として二個求まる。探索された二つの解をそれぞれθ1、θ2とすると、それぞれ直接波仰角α、間接波仰角βのいずれかに相当することになる。ここで、図4に示したマルチパス環境下における直接波12と間接波13との角度関係から分かるように、θ1、θ2のうち大きい方が直接波仰角αに相当することから、直接波仰角αの推定が可能となる。つまり、間接波13の影響を受けている場合においては、仰角探索部512にて直接波仰角α及び間接波仰角βに相当するθ1、θ2を求められることを意味する。
【0056】
一方、γが零とみなせる場合、式(6)及び式(7)の右辺第2項がともに零となるため、θの値に関わらず式(4)と式(5)とが常に等しくなり、直接波仰角α又は間接波仰角βの推定が不可能となる。つまり、間接波の影響を受けていない場合は、仰角探索部512にて直接波仰角α又は間接波仰角βを測角することは不可となる。
【0057】
なお、式(4)と式(5)との差が零又はπの整数倍に等しくなるθの値を探索する実施形態としては、例えばθとして取り得る値の範囲を指定し、θの値を変化させながら式(6)の実部・虚部の比と、(7)の実部・虚部の比とを比較し、両者が同じ値となるθを探索する方法や、以下の式(8)が最小となるθの値を探索する方法がある。
【0058】
argmin|arg(Σ1−(S1(θ)/S2(θ))・Σ2)
−arg(Σ1−(S1(θ)/S3(θ))・Σ3)| ・・・(8)
【0059】
式(8)が最小になるθの値においては、式(6)と式(7)とから算出される値の差は零である。
【0060】
図5は式(8)の算出結果の例を示す図である。図5[A]の例のように解が二個求められた場合は、二つの解θ1、θ2が直接波仰角抽出部55に出力され、両者のうち大きい方が直接波仰角αとして出力される。一方、図5[B]の例のように解が二個求められなかった場合は、第2仰角算出部52に進む。なお、θの探索方法については特に制限はない。
【0061】
以上より、本実施形態1のレーダ装置10によれば、第1仰角算出部51を有する測角処理器5を用いたことにより、マルチパス環境下における直接波仰角の測角を短時間で高精度に行うことが可能となる。また、直接波のみの場合を想定した測角方式基づく第2仰角算出部52を組み合わせることにより、マルチパスの影響がない場合にも測角が可能となる。
【0062】
次に、本実施形態1の測角方法及び測角プログラムについて説明する。
【0063】
本実施形態1の測角方法は、本実施形態1の測角装置の動作を、方法の発明として捉えたものである。すなわち、本実施形態1の測角方法は、次のステップを有する。第1仰角算出部51が、受信信号に基づいて直接波仰角及び間接波仰角を算出するステップ。第2仰角算出部52が、受信信号に基づいて直接波仰角のみを算出するステップ。直接波仰角出力部50が、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出部51で算出された直接波仰角を出力し、第1仰角算出部51で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出部52で算出された直接波仰角を出力するステップ。
【0064】
換言すると、図6[A]に示すように、受信信号に基づいて直接波仰角及び間接波仰角を算出し(ステップ201)、直接波仰角及び間接波仰角の両方が算出された否かを判定し(ステップ202)、直接波仰角及び間接波仰角の両方が算出されればその算出された直接波仰角を出力し(ステップ203)、直接波仰角及び間接波仰角の両方が算出されなければ、受信信号に基づいて直接波仰角のみを算出し(ステップ204)、その算出された直接波仰角を出力する(ステップ205)。
【0065】
本実施形態1の測角装置の各部を、コンピュータで実現してもよい。本実施形態1の測角プログラムは、本実施形態1の測角装置の各部としてコンピュータを機能させるものである。図6[B]に示すように、コンピュータ300は、CPU301、ROM302、RAM303及び入出力インタフェース304等を備える一般的なものでよい。すなわち、本実施形態1の測角プログラムは、受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出手段(第1仰角算出部51に相当)、受信信号に基づいて直接波仰角のみを算出する第2仰角算出手段(第2仰角算出部52に相当)、及び、第1仰角算出手段で直接波仰角及び間接波仰角の両方が算出された場合は第1仰角算出手段で算出された直接波仰角を出力し、第1仰角算出手段で直接波仰角及び間接波仰角の両方が算出されなかった場合は第2仰角算出手段で算出された直接波仰角を出力する直接波仰角出力手段(直接波仰角出力部50に相当)、としてコンピュータ300を機能させるためのものである。
【0066】
CPU301は、ROM302又はRAM303から本測角プログラムを読み出し、解釈し、実行する。本測角プログラムは、非一時的な記録媒体(non-transitory storage medium)、例えば光ディスク、半導体メモリなどに記録されてもよい。その場合、本測角プログラムは、記録媒体からコンピュータ300によって読み出され、実行される。
【0067】
本実施形態1の測角方法及び測角プログラムは、本実施形態1の測角装置の他の構成、本実施形態1のレーダ装置の構成、又は後述する実施形態2のレーダ装置の構成に準じて、複雑にしてもよい。本実施形態1の測角方法及び測角プログラムによれば、本実施形態1の測角装置と同様の効果を奏する。
【0068】
<実施形態2>
実施形態1では、時分割せずに同時刻に形成された三本の受信ビームの中から選択された二組のビーム対を用いて、測角処理を行った。これに対し、本実施形態2では、同時に形成する受信ビームを二本とし、二本の受信ビームを二回に分けて形成することにより測角処理を行う。この場合でも、実施形態1同様にマルチパス環境下における直接波仰角の推定が可能となる。以下では、実施形態1とは異なる点について説明する。
【0069】
実施形態1は、少なくとも三本の受信ビームを同時に形成する必要があるため、DBFを採用することが前提となった。これに対し、本実施形態2は、同時に形成する受信ビームが二本で済むため、ABFでも容易に採用可能である。
【0070】
図7及び図8に示すように、本実施形態2のレーダ装置10a、10bは、異なる時刻に得られた受信信号を同じ時刻に得られた受信信号に変換する時刻差補正処理器7を、更に備えたことを特徴とする。図7は、本実施形態2においてDBFを採用した場合におけるレーダ装置10aを示すブロック図である。図1に示した実施形態1のレーダ装置を示すブロック図と比較すると、時刻差補正処理器7が新たに設けられていることが分かる。これらの動作については後述する。
【0071】
一方、ABFを採用した場合におけるレーダ装置10bを示すブロック図を、図8に示す。ABF採用時とDBF採用時とでは、目標検出及び測角処理を行う際に必要となる受信信号を得る方法が異なる。そのため、図8のレーダ装置10bでは、送受信器2bの構成が図7と異なり、信号処理器8b内のビーム形成器が不要となる点が図7と異なる。図8のレーダ装置10bのその他の構成については、図7に示したDBF採用時と同じである。
【0072】
次に、実施形態2における動作について詳細に説明する。図9は受信ビームの概念図を示す。異なる時刻t1、t2にそれぞれ二本の受信ビームが仰角方向に所定の間隔で形成されている。このとき、時刻t1に形成された二本の受信ビームうちの一本と、時刻t2に形成された二本の受信ビームのうちの一本とは、同一のビーム形状で、かつ仰角方向も同じである。この受信ビームをビーム2とし、時刻t1に形成された残りの受信ビームをビーム1とし、時刻t2に形成された残りの受信ビームをビーム3とする。なお、ビーム1とビーム2の形状は異なるものとする。
【0073】
ここで、時刻t1においてビーム1により検出された受信信号をΣ1、ビーム2により検出された受信信号をΣ2とし、時刻t2においてビーム2により検出された受信信号をΣ2'、ビーム3により検出された受信信号をΣ3'とする。ただし、ダッシュ記号(’)の無い場合が時刻t1における受信信号を意味し、ダッシュ記号(’)の有る場合が時刻t2における受信信号を意味する。このとき、時刻t1、t2における直接波の信号強度及び絶対位相は異なるが、直接波と間接波との相対振幅比及び相対位相差は変化しないと考えられる。よって、各受信信号はそれぞれ以下の式で表される。
【0074】
Σ1=Rt1e-jφ't1[S1(α)+γS1(β)e-jφ] ・・・(9)
Σ2=Rt1e-jφ't1[S2(α)+γS2(β)e-jφ] ・・・(10)
Σ2'=Rt2e-jφ't2[S2(α)+γS2(β)e-jφ] ・・・(11)
Σ3'=Rt2e-jφ't2[S3(α)+γS3(β)e-jφ] ・・・(12)
α: 直接波の仰角
β: 間接波の仰角
Rt1: 時刻t1における直接波の振幅強度
Rt2: 時刻t2における直接波の振幅強度
φ't1: 時刻t1における直接波の絶対位相
φ't2: 時刻t2における直接波の絶対位相
γ: 直接波に対する間接波の相対振幅比
φ: 直接波に対する間接波の相対位相差
【0075】
本実施形態2において、測角処理に必要な受信信号が目標検出器4に送られる。測角処理に必要な受信信号としては、上記Σ1、Σ2、Σ2'、Σ3'が最低限含まれる。また、第2仰角算出部52においてモノパルス方式を採用する場合は、モノパルスビーム形成処理により得られたΣ、Δ各ビームでの受信信号が更に含まれる。目標検出器4にて目標が検出された場合には、受信信号をビーム選択器6に出力する。
【0076】
ここで、測角処理器5にて測角処理を行うためには、同時刻に三本の受信ビームにより検出される受信信号が必要となる。そこで、ビーム選択器6及び時刻差補正処理器7により、時刻t1においてビーム3により検出される受信信号Σ3を算出する。
【0077】
ビーム選択器6は、受信信号Σ3を算出する上で必要となるΣ2、Σ2'、Σ3'を選択し、時刻差補正処理器7に送り、またΣ1、Σ2を測角処理器5へ送る。
【0078】
時刻差補正処理器7では以下の演算を行う。
(Σ2/Σ2')・Σ3'
=(Rt1e-jφ't1/Rt2e-jφ't2)・Rt2e-jφ't2[S3(α)+γS3(β)e-jφ]
=Rt1e-jφ't1[S3(α)+γS3(β)e-jφ] ・・・(13)
【0079】
ここで、式(13)の右辺のφ't1をφ'と書き直すと式(3)の右辺と一致することから、式(13)の右辺は、時刻t1においてビーム3により検出した場合に得られると考えられる受信信号Σ3であることが分かる。つまり、時刻差補正処理器7では受信信号Σ2、Σ2'、Σ3'から、時刻t1においてビーム3により検出される受信信号Σ3を算出していることになる。この算出された受信信号Σ3は測角処理器5に送られる。
【0080】
これにより、測角処理器5には、同時刻t1おいて3つの受信ビームにより得られた受信信号Σ1、Σ2、Σ3が送られることになる。詳細には、受信信号Σ1、Σ2、Σ3は、図2に示した測角処理器5内の第1仰角算出部51に送られる。以降の処理は、実施形態1に記載した処理と同じである。
【0081】
以上より、ビーム選択器6及び時刻差補正処理器7を設けることにより、二本の受信ビームを二回に分けて形成した場合でも実施形態1と同等の精度でマルチパス環境下における測角処理を行うことが可能となる。また、本実施形態2では、ABFでも容易に採用できるため、装置に掛かるコストを低減することが可能となる。
【0082】
次に、本発明の効果について総括する。(1)第1仰角算出部にて直接波のみならず間接波も考慮した上で直接波仰角を解析的に算出することにより、マルチパス環境下において高精度な測角が可能となる。(2)第1仰角算出部に加えて、直接波のみの場合を想定した測角処理を行う第2仰角算出部も併用しているため、マルチパスの影響の有無に関わらず測角が可能となる。(3)1回のスキャン内で連続して放射するビームからの反射波を利用していることから、短時間での測角が可能となる。(4)三本以上の受信ビームが形成可能なビーム形成器を構成することにより、より高精度な測角が可能となる。(5)時刻差補正処理器を設けることにより、受信ビーム数を二本として、二回に分けて走査して受信ビームを形成した場合においても測角が可能となり、ABF(アナログビーム形成)手法に基づき受信ビーム形成器を構成することにより、ハードウェアに掛かるコストを低減することが可能となる。
【0083】
以上、上記各実施形態を参照して本発明を説明したが、本発明は上記各実施形態に限定されるものではない。本発明の構成や詳細については、当業者が理解し得るさまざまな変更を加えることができる。また、本発明には、上記各実施形態の構成の一部又は全部を相互に適宜組み合わせたものも含まれる。
【0084】
上記の実施形態の一部又は全部は以下の付記のようにも記載され得るが、本発明は以下の構成に限定されるものではない。
【0085】
[付記1]受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出部と、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出部と、
前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する直接波仰角出力部と、
を備えたことを特徴とする測角装置。
【0086】
[付記2]付記1記載の測角装置であって、
三本の受信ビームをビーム1、ビーム2、ビーム3とし、
前記ビーム1についての前記受信信号を受信信号1とし、
前記ビーム2についての前記受信信号を受信信号2とし、
前記ビーム3についての前記受信信号を受信信号3とし、
前記受信信号1が仰角の関数であるビームパターン1を含むとし、
前記受信信号2が仰角の関数であるビームパターン2を含むとし、
前記受信信号3が仰角の関数であるビームパターン3を含むとしたとき、
前記第1仰角算出部は、ビーム対選択部及び仰角探索部を有し、
前記ビーム対選択部は、前記三本の受信ビームの中から前記ビーム1及び前記ビーム2からなるビーム対1と前記ビーム2及び前記ビーム3からなるビーム対2とを選択し、
前記仰角探索部は、前記ビーム対1について、前記ビームパターン1と前記ビームパターン2との商からなる位相補正項を重みとした前記受信信号2を、前記受信信号1から差し引いた複素数の位相を算出し、前記ビーム対2について、ビームパターン2とビームパターン3との商からなる位相補正項を重みとした前記受信信号3を、前記受信信号2から差し引いた複素数の位相を算出し、両者の位相の差が零又は180度の整数倍に等しくなる条件を満たす仰角を探索する、
ことを特徴とする測角装置。
【0087】
[付記3]付記2記載の測角装置であって、
前記直接波仰角出力部は、間接波判定部及び直接波仰角抽出部を有し、
前記間接波判定部は、前記第1仰角算出部にて前記条件を満たす仰角が二個求められた場合は、前記第1仰角算出部による算出結果を用いる判定をし、前記第1仰角算出部にて前記条件を満たす仰角が二個求められなかった場合は、前記第2仰角算出部による算出結果を用いる判定をし、
前記直接波仰角抽出部は、前記間接波判定部が前記第1仰角算出部による算出結果を用いる判定をしたときは、前記条件を満たす二個の仰角のうち大きい方を前記直接波仰角として出力し、
前記第2仰角算出部は、前記間接波判定部が当該第2仰角算出部による算出結果を用いる判定をしたときは、当該第2仰角算出部による算出結果を前記直接波仰角として出力する、
ことを特徴とする測角装置。
【0088】
[付記4]付記1乃至3のいずれか一つに記載の測角装置であって、
前記算出に必要なパラメータを前記第1仰角算出部及び前記第2仰角算出部へ出力するパラメータ出力部を、
更に備えたことを特徴とする測角装置。
【0089】
[付記5]レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線と、
高周波信号を前記空中線に出力するともに前記空中線で受信された信号を検波する送受信器と、
前記送受信器による受信処理後の信号から複数の受信ビームを形成するとともに、形成した各受信ビームでの受信信号を抽出するビーム形成器と、
前記ビーム形成器で形成された各ビームでの受信信号に基づいて目標を検出する目標検出器と、
前記目標検出器で前記目標が検出された場合に前記ビーム形成器で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器と、
前記選択された受信ビーム及び当該受信ビームにより算出された受信信号に基づいて測角処理を行う付記1乃至4のいずれか一つに記載の測角装置と、
を備えたことを特徴とするレーダ装置。
【0090】
[付記6]付記5記載のレーダ装置であって、
前記ビーム形成器は、測角処理に必要な受信信号を全て同時刻に形成し、前記第1仰角算出部における処理に必要となる三本以上の受信ビーム及び第2仰角算出部における処理に必要となる受信ビームを形成し、
前記ビーム選択器は、前記第1仰角算出部における処理に必要となる三本の受信ビームを選択する、
ことを特徴とするレーダ装置。
【0091】
[付記7]付記5記載のレーダ装置であって、
異なる時刻に得られた受信信号を同じ時刻に得られた受信信号に変換する時刻差補正処理器を更に備えた、
ことを特徴とするレーダ装置。
【0092】
[付記8]第1仰角算出部が、受信信号に基づいて直接波仰角及び間接波仰角を算出し、
第2仰角算出部が、前記受信信号に基づいて前記直接波仰角のみを算出し、
直接波仰角出力部が、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する、
ことを特徴とする測角方法。
【0093】
[付記9]受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出手段、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出手段、及び、
前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出手段で算出された前記直接波仰角を出力し、前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出手段で算出された前記直接波仰角を出力する直接波仰角出力手段、
としてコンピュータを機能させるための測角プログラム。
【0094】
[付記11]同時刻に異なる三本のビームにより求められた受信信号を用いてマルチパス環境下における直接波仰角及び間接波仰角を算出する第1仰角算出部と、
直接波のみの場合を想定した測角処理を行う第2仰角算出部と、
前記第1仰角算出部及び前記第2仰角算出部における計算に必要なパラメータをそれぞれの前記第1仰角算出部及び前記第2仰角算出部に出力するパラメータ出力部と、
前記直接波仰角を推定する際に前記第1仰角算出部における算出結果を用いる否かを判定する間接波判定部と、
前記第1仰角算出部における算出結果を用いて前記直接波仰角を求める直接波仰角抽出部とを備え、
前記第1仰角算出部は、
受信信号を求める際に用いられた三本の異なる複数ビームの中からビーム1及びビーム2からなるビーム対1と、ビーム2及びビーム3からなるビーム対2との計二組のビーム対を選択するビーム対選択部と、
仰角をパラメータとして、ビームパターン1とビームパターン2の商からなる位相補正項を重みとした受信信号2を、受信信号1から差し引いた複素数の位相、及び、ビームパターン1とビームパターン3の商からなる位相補正項を重みとした受信信号3を、受信信号1から差し引いた複素数の位相を算出し、両者の位相差が零又は180度の整数倍に等しくなる仰角を探索する仰角探索部とを有し、
前記第1仰角算出部にて上記条件を満たす仰角が二個求められた場合は、前記間接波判定部にて前記第1仰角算出部における算出結果を用いる判定をし、前記直接波仰角抽出部にて仰角に関する二個の解のうち、値の大きい方を直接波仰角として出力し、
前記第1仰角算出部にて上記条件を満たす仰角が二個求められなかった場合は、前記間接波判定部にて前記第2仰角算出部における算出結果を用いる判定をし、前記第2仰角算出部にて直接波仰角を算出し、その値を直接波仰角として出力する、
ことを特徴とする測角装置。
【0095】
[付記12]レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線と、
高周波信号を空中線に出力するともに空中線より送られた受信信号を検波し、受信処理後の信号からマルチビームを形成し、形成した各ビームでのディジタル受信信号を抽出する受信信号処理部と、
前記受信処理部で形成された各ビームでの受信信号をもとに目標検出を行う目標信号検出器と、
目標が検出された場合に前記ビーム形成器で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器と、
前記選択された受信ビーム及び前記受信ビームにより算出された受信信号をもとに測角処理を行う付記11に記載の測角装置と、
を備えたことを特徴とするレーダ装置。
【0096】
[付記13]付記12記載のレーダ装置において、
測角処理に必要な受信信号を全て同時刻に形成し、
前記第1仰角算出部における処理で必要となる三本以上の受信ビーム及び前記第2仰角算出部における処理で必要となるビームを前記受信ビーム形成器にて形成するとともに、
前記ビーム選択器として、前記第1仰角算出部での処理において必要となる三本のマルチビームを選択するビーム選択器を有すること
を特徴とするレーダ装置。
【0097】
[付記14]付記12記載のレーダ装置において、
同時に形成する受信ビーム数を二本とし、二回に分けて走査してビーム一本分をオーバーラップさせて受信ビームを形成し、
前記ビーム選択器内で異なる時刻に得られた受信信号から、同時刻に受信した信号に変換する時刻差補正処理器を更に備え、
異なる時刻の同一受信ビームパターンにより得られた受信信号を基に時刻差補正処理がなされる、
ことを特徴とするレーダ装置。
【産業上の利用可能性】
【0098】
本発明は、地面や海面等からの反射波があるマルチパス環境下で目標の仰角情報を検出する測角技術、例えば目標を検出するレーダ装置等に利用可能である。
【符号の説明】
【0099】
1 空中線
2、2b 送受信器
3 ビーム形成器
4 目標検出器
5 測角処理器(測角装置)
6 ビーム選択器
7 時刻差補正処理器
8、8a、8b 信号処理器
10、10a、10b レーダ装置
11 目標
12 直接波
13 間接波
14 地面又は海面
50 直接波仰角出力部
51 第1仰角算出部
52 第2仰角算出部
53 パラメータ出力部
54 間接波判定部
55 直接波仰角抽出部
511 ビーム対選択部
512 仰角探索部
100 Δ/Σが複素平面上で描く円軌跡
101a、101b、101c、101d、101e、101f 観測値
102 複素除算手段
103 第1の円中心演算手段
104 角度変換手段
300 コンピュータ
301 CPU
302 ROM
303 RAM
304 入出力インタフェース
【特許請求の範囲】
【請求項1】
受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出部と、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出部と、
前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する直接波仰角出力部と、
を備えたことを特徴とする測角装置。
【請求項2】
請求項1記載の測角装置であって、
三本の受信ビームをビーム1、ビーム2、ビーム3とし、
前記ビーム1についての前記受信信号を受信信号1とし、
前記ビーム2についての前記受信信号を受信信号2とし、
前記ビーム3についての前記受信信号を受信信号3とし、
前記受信信号1が仰角の関数であるビームパターン1を含むとし、
前記受信信号2が仰角の関数であるビームパターン2を含むとし、
前記受信信号3が仰角の関数であるビームパターン3を含むとしたとき、
前記第1仰角算出部は、ビーム対選択部及び仰角探索部を有し、
前記ビーム対選択部は、前記三本の受信ビームの中から前記ビーム1及び前記ビーム2からなるビーム対1と前記ビーム2及び前記ビーム3からなるビーム対2とを選択し、
前記仰角探索部は、前記ビーム対1について、前記ビームパターン1と前記ビームパターン2との商からなる位相補正項を重みとした前記受信信号2を、前記受信信号1から差し引いた複素数の位相を算出し、前記ビーム対2について、ビームパターン2とビームパターン3との商からなる位相補正項を重みとした前記受信信号3を、前記受信信号2から差し引いた複素数の位相を算出し、両者の位相の差が零又は180度の整数倍に等しくなる条件を満たす仰角を探索する、
ことを特徴とする測角装置。
【請求項3】
請求項2記載の測角装置であって、
前記直接波仰角出力部は、間接波判定部及び直接波仰角抽出部を有し、
前記間接波判定部は、前記第1仰角算出部にて前記条件を満たす仰角が二個求められた場合は、前記第1仰角算出部による算出結果を用いる判定をし、前記第1仰角算出部にて前記条件を満たす仰角が二個求められなかった場合は、前記第2仰角算出部による算出結果を用いる判定をし、
前記直接波仰角抽出部は、前記間接波判定部が前記第1仰角算出部による算出結果を用いる判定をしたときは、前記条件を満たす二個の仰角のうち大きい方を前記直接波仰角として出力し、
前記第2仰角算出部は、前記間接波判定部が当該第2仰角算出部による算出結果を用いる判定をしたときは、当該第2仰角算出部による算出結果を前記直接波仰角として出力する、
ことを特徴とする測角装置。
【請求項4】
請求項1乃至3のいずれか一つに記載の測角装置であって、
前記算出に必要なパラメータを前記第1仰角算出部及び前記第2仰角算出部へ出力するパラメータ出力部を、
更に備えたことを特徴とする測角装置。
【請求項5】
レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線と、
高周波信号を前記空中線に出力するともに前記空中線で受信された信号を検波する送受信器と、
前記送受信器による受信処理後の信号から複数の受信ビームを形成するとともに、形成した各受信ビームでの受信信号を抽出するビーム形成器と、
前記ビーム形成器で形成された各ビームでの受信信号に基づいて目標を検出する目標検出器と、
前記目標検出器で前記目標が検出された場合に前記ビーム形成器で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器と、
前記選択された受信ビーム及び当該受信ビームにより算出された受信信号に基づいて測角処理を行う請求項1乃至4のいずれか一つに記載の測角装置と、
を備えたことを特徴とするレーダ装置。
【請求項6】
請求項5記載のレーダ装置であって、
前記ビーム形成器は、測角処理に必要な受信信号を全て同時刻に形成し、前記第1仰角算出部における処理に必要となる三本以上の受信ビーム及び第2仰角算出部における処理に必要となる受信ビームを形成し、
前記ビーム選択器は、前記第1仰角算出部における処理に必要となる三本の受信ビームを選択する、
ことを特徴とするレーダ装置。
【請求項7】
請求項5記載のレーダ装置であって、
異なる時刻に得られた受信信号を同じ時刻に得られた受信信号に変換する時刻差補正処理器を更に備えた、
ことを特徴とするレーダ装置。
【請求項8】
第1仰角算出部が、受信信号に基づいて直接波仰角及び間接波仰角を算出し、
第2仰角算出部が、前記受信信号に基づいて前記直接波仰角のみを算出し、
直接波仰角出力部が、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する、
ことを特徴とする測角方法。
【請求項9】
受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出手段、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出手段、及び、
前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出手段で算出された前記直接波仰角を出力し、前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出手段で算出された前記直接波仰角を出力する直接波仰角出力手段、
としてコンピュータを機能させるための測角プログラム。
【請求項1】
受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出部と、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出部と、
前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する直接波仰角出力部と、
を備えたことを特徴とする測角装置。
【請求項2】
請求項1記載の測角装置であって、
三本の受信ビームをビーム1、ビーム2、ビーム3とし、
前記ビーム1についての前記受信信号を受信信号1とし、
前記ビーム2についての前記受信信号を受信信号2とし、
前記ビーム3についての前記受信信号を受信信号3とし、
前記受信信号1が仰角の関数であるビームパターン1を含むとし、
前記受信信号2が仰角の関数であるビームパターン2を含むとし、
前記受信信号3が仰角の関数であるビームパターン3を含むとしたとき、
前記第1仰角算出部は、ビーム対選択部及び仰角探索部を有し、
前記ビーム対選択部は、前記三本の受信ビームの中から前記ビーム1及び前記ビーム2からなるビーム対1と前記ビーム2及び前記ビーム3からなるビーム対2とを選択し、
前記仰角探索部は、前記ビーム対1について、前記ビームパターン1と前記ビームパターン2との商からなる位相補正項を重みとした前記受信信号2を、前記受信信号1から差し引いた複素数の位相を算出し、前記ビーム対2について、ビームパターン2とビームパターン3との商からなる位相補正項を重みとした前記受信信号3を、前記受信信号2から差し引いた複素数の位相を算出し、両者の位相の差が零又は180度の整数倍に等しくなる条件を満たす仰角を探索する、
ことを特徴とする測角装置。
【請求項3】
請求項2記載の測角装置であって、
前記直接波仰角出力部は、間接波判定部及び直接波仰角抽出部を有し、
前記間接波判定部は、前記第1仰角算出部にて前記条件を満たす仰角が二個求められた場合は、前記第1仰角算出部による算出結果を用いる判定をし、前記第1仰角算出部にて前記条件を満たす仰角が二個求められなかった場合は、前記第2仰角算出部による算出結果を用いる判定をし、
前記直接波仰角抽出部は、前記間接波判定部が前記第1仰角算出部による算出結果を用いる判定をしたときは、前記条件を満たす二個の仰角のうち大きい方を前記直接波仰角として出力し、
前記第2仰角算出部は、前記間接波判定部が当該第2仰角算出部による算出結果を用いる判定をしたときは、当該第2仰角算出部による算出結果を前記直接波仰角として出力する、
ことを特徴とする測角装置。
【請求項4】
請求項1乃至3のいずれか一つに記載の測角装置であって、
前記算出に必要なパラメータを前記第1仰角算出部及び前記第2仰角算出部へ出力するパラメータ出力部を、
更に備えたことを特徴とする測角装置。
【請求項5】
レーダ用の送信電波を放射するとともに、前記送信電波に対応する目標からの反射波を受信する空中線と、
高周波信号を前記空中線に出力するともに前記空中線で受信された信号を検波する送受信器と、
前記送受信器による受信処理後の信号から複数の受信ビームを形成するとともに、形成した各受信ビームでの受信信号を抽出するビーム形成器と、
前記ビーム形成器で形成された各ビームでの受信信号に基づいて目標を検出する目標検出器と、
前記目標検出器で前記目標が検出された場合に前記ビーム形成器で形成された受信信号の中から測角処理に必要な受信ビームを選択するとともに、前記受信ビームにより得られた受信信号を選択又は形成するビーム選択器と、
前記選択された受信ビーム及び当該受信ビームにより算出された受信信号に基づいて測角処理を行う請求項1乃至4のいずれか一つに記載の測角装置と、
を備えたことを特徴とするレーダ装置。
【請求項6】
請求項5記載のレーダ装置であって、
前記ビーム形成器は、測角処理に必要な受信信号を全て同時刻に形成し、前記第1仰角算出部における処理に必要となる三本以上の受信ビーム及び第2仰角算出部における処理に必要となる受信ビームを形成し、
前記ビーム選択器は、前記第1仰角算出部における処理に必要となる三本の受信ビームを選択する、
ことを特徴とするレーダ装置。
【請求項7】
請求項5記載のレーダ装置であって、
異なる時刻に得られた受信信号を同じ時刻に得られた受信信号に変換する時刻差補正処理器を更に備えた、
ことを特徴とするレーダ装置。
【請求項8】
第1仰角算出部が、受信信号に基づいて直接波仰角及び間接波仰角を算出し、
第2仰角算出部が、前記受信信号に基づいて前記直接波仰角のみを算出し、
直接波仰角出力部が、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出部で算出された前記直接波仰角を出力し、前記第1仰角算出部で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出部で算出された前記直接波仰角を出力する、
ことを特徴とする測角方法。
【請求項9】
受信信号に基づいて直接波仰角及び間接波仰角を算出する第1仰角算出手段、
前記受信信号に基づいて前記直接波仰角のみを算出する第2仰角算出手段、及び、
前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出された場合は前記第1仰角算出手段で算出された前記直接波仰角を出力し、前記第1仰角算出手段で前記直接波仰角及び前記間接波仰角の両方が算出されなかった場合は前記第2仰角算出手段で算出された前記直接波仰角を出力する直接波仰角出力手段、
としてコンピュータを機能させるための測角プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−185007(P2012−185007A)
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願番号】特願2011−47677(P2011−47677)
【出願日】平成23年3月4日(2011.3.4)
【出願人】(000004237)日本電気株式会社 (19,353)
【出願人】(000232221)日本電気航空宇宙システム株式会社 (14)
【Fターム(参考)】
【公開日】平成24年9月27日(2012.9.27)
【国際特許分類】
【出願日】平成23年3月4日(2011.3.4)
【出願人】(000004237)日本電気株式会社 (19,353)
【出願人】(000232221)日本電気航空宇宙システム株式会社 (14)
【Fターム(参考)】
[ Back to top ]