
測距システム
【課題】極至近距離の測距を可能にする新規な測距手法を提供する。
【解決手段】判定部3は、パルスレーダ1によって生成された受信波形を時間軸上において複数の区間に分割し、分割された区間のそれぞれにおける受信波形の積分値の大小関係に基づいて、受信波形の位相パターンを判定する。測距部4は、ターゲットの既知の距離において出現する位相パターンを特定するとともに、この位相パターンの繰り返しに基づいて、既知の距離からの変化量を算出し、これによって、ターゲットの現在の距離を算出する。
【解決手段】判定部3は、パルスレーダ1によって生成された受信波形を時間軸上において複数の区間に分割し、分割された区間のそれぞれにおける受信波形の積分値の大小関係に基づいて、受信波形の位相パターンを判定する。測距部4は、ターゲットの既知の距離において出現する位相パターンを特定するとともに、この位相パターンの繰り返しに基づいて、既知の距離からの変化量を算出し、これによって、ターゲットの現在の距離を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ターゲットでの反射によって得られる受信波を用いた測距システムに関する。
【背景技術】
【0002】
一般に、パルスレーダでは、送信されたパルス信号が測拒対象となるターゲットで反射し受信されるまでの往復伝播時間に基づいて、ターゲットの距離が算出される。特許文献1には、パルスを広帯域で外部へ送信し、広帯域で受信した受信波形を広帯域のサンプリングパルスでサンプリングする等価時間サンプリングパルスレーダが開示されている。ここで、等価時間サンプリングとは、短周期の繰り返し信号をこれよりも周期の長い長周期の繰り返し信号へと変換する処理をいう。短周期の繰り返し信号に対し、この繰り返し周期よりも十分に大きい一定の時間間隔(フレーム周期)内で、周期毎に1点ずつサンプリングし、かつ、サンプリング時刻を繰り返し信号の繰り返し点からシフトさせる。このようなシフト処理は、時間走査と呼ばれている。これにより、短周期の繰り返し信号は、時間軸上において伸張され、同一の波形を有する長周期の信号に変換されるので、分解能(レーダでは距離分解能)の向上を図ることができる。
【0003】
【特許文献1】特表平10−511182号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の目的は、極至近距離の測距を可能にする新規な測距手法を提供することである。
【課題を解決するための手段】
【0005】
かかる課題を解決するために、本発明は、外部へ送信された送信波のうち、ターゲットで反射された受信波を受信するとともに、この受信波に所定の処理を施すことによって受信波形を出力するパルスレーダと、受信波形を時間軸上で複数の区間に分割し、分割された区間のそれぞれにおける受信波形の積分値の大小関係に基づいて、受信波形の位相パターンを判定する判定部と、ターゲットの既知の距離において出現する位相パターンを特定するとともに、この特定された位相パターンの繰り返しに基づいて、既知の距離からの変化量を算出することによって、ターゲットの現在の距離を算出する測距部とを有する測距システムを提供する。
【0006】
ここで、本発明において、受信アンテナに入力された受信波に含まれるノイズ成分を除去するための基準波形を記憶する記憶部をさらに有していてもよい。この場合、パルスレーダは、受信アンテナに入力された入力波形と、記憶部より読み出された基準波形との差分を算出することによって、受信波形を生成することが好ましい。
【発明の効果】
【0007】
本発明では、ターゲットの既知の距離において出現した受信波形の位相パターンを特定し、ターゲットの距離の変化に応じた、その位相パターンの繰り返しに着目する。この位相パターンは、波長が既知であることを条件として、受信波形が1周期進む毎に出現するので、この繰り返しをモニタリングすることで、既知の距離からの変化量も一義的に特定されるので、ターゲットの現在の距離を算出することができる。本発明によれば、極至近距離の測距が可能になるという効果がある。
【発明を実施するための最良の形態】
【0008】
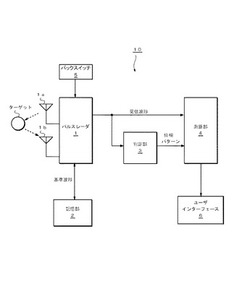
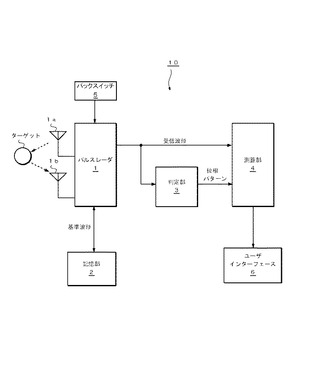
図1は、本実施形態に係る測距システム10の構成図である。この測距システム10は、自動車等の車両に搭載され、車両後進時(バック時)に、車両後方のターゲット(障害物)をモニタリングするために用いられる。測距システム10は、パルスレーダ1と、記憶部2と、判定部3と、測距部4と、バックスイッチ5と、ユーザインターフェース6とを主体に構成されている。ここで、バックスイッチ5は、変速段が「R」に入れられたことを検出するスイッチである。また、ユーザインターフェース6は、ターゲットまでの距離に応じた警報をドライバに通知するための装置であり、具体的には、スピーカやディスプレイが挙げられる。
【0009】
パルスレーダ1は、一般的なパルスレーダと同様、外部へパルス(送信波)を送信し、自車両の近傍周辺に存在するターゲットにて反射したパルス(受信波)を受信する。本実施形態では、距離分解能の向上を図るべく、等価時間サンプリング法が用いられる。なお、詳細については後述するが、極至近距離では、本実施形態の特徴的な測距手法として、受信波形の位相パターンの繰り返しに基づいた測距が行われる。パルスレーダ1は、外部へパルス(例えば波長=1m)を送信するための送信アンテナ1aと、外部からパルスを受信するための受信アンテナ1bとを有する。送信アンテナ1aおよび受信アンテナ1bは、それぞれ別個に設けてもよいが、送受信機能を兼ね備えた1本のアンテナとしてもよい。
【0010】
ターゲットでの反射によって得られる受信波は、等価時間サンプリングによって時間軸上で伸張され、これによって入力波形が得られる。アナログ波である所定長の入力波形に対して、アナログ/デジタル変換が施され、離散的な値0〜255のデジタル波が生成される。入力波形の時間的な間隔は、例えば25msに設定することができる。なお、1本のアンテナで送受信アンテナ1a,1bを兼用する場合には、送信パルスと受信パルスとを時間的または周波数的に分離する処理が必要となる。
【0011】
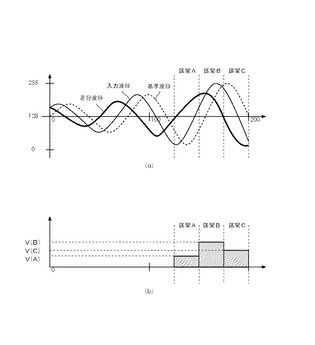
記憶部2には、受信波に含まれるノイズ成分を除去するための基準波形が記憶されている。このような基準波形としては、例えば、測距システム10の起動時に、受信アンテナ1bに入力された入力波形を用いることができる。ここで、「測距システム10の起動時」とは、測距システム10への電源供給が行われ、測距システム10の動作が開始される時点をいい、本実施形態では、バックスイッチ5がオンになった時点である。この時点では、自車両(測距システム10)の後方近傍にターゲットが実際に存在するか否かに関わりなく、システム処理上、このようなターゲットが存在しないものとして取り扱われる。ターゲットが存在しないとみなせる状態としては、例えば、車両周辺にターゲットが存在しない状態(例えば、路上が平坦な状態)、車両周辺にターゲットが存在しても走行に支障がない状態(路上に小石等がある状態)等が挙げられる。記憶部2のデバイスとしては、データの保持に電力を必要としない不揮発性メモリが用いられる。これにより、システム停止後(電源供給停止後)であっても、基準波形が消去されることなく保持される。パルスレーダ1は、測距システム10の起動時以降のタイミングにおいて、図2(a)に示すように、受信アンテナ1bに入力された入力波形と、記憶部2に記憶された基準波形との差分を求めることによって、差分波形を生成する。以下の処理では、測距のために用いられる受信波形として、この差分波形が用いられる。
【0012】
判定部3は、極至近距離の測距において重要な役割を担っており、差分波形の積分(絶対値ベース)に基づいて、差分波形の位相パターンを判定する。そのために、パルスレーダ1によって生成された差分波形に対して、次のような処理が行われる。まず、同図(a)に示したように、差分波形が時間軸上で複数の区間A〜Cに分割される。具体的には、所定期間の後半部分に、同一の区間幅を有する3つの区間A〜Cが設定される。区間A〜Cを後半部分に設定する理由は、ターゲットが測距システム10から離れるほど受信タイミングが遅れる点を考慮したものであり、1フレーム期間の後半部分は、ターゲットによって反射されたパルスが顕著に表れやすい領域だからである。つぎに、各区間A〜Cにおいて、差分波形が積分・平均され、積分値V(A),V(B),V(C)が算出される。同図(b)に示すように、ある区間における差分波形の振幅が大きいほど、その区間における積分値Vも大きくなる。すなわち、これらの積分値Vの具体的な値は、差分波形の位相の変化に追従して、随時変化する。つぎに、区間A〜C毎に算出された3つの積分値Vの大小関係が判定され、この大小関係に基づいて、区間A〜Cの全体における差分波形の位相パターン(V(A)<V(C)<V(B))が特定される。
【0013】
測距部4は、極至近距離以外の場合には、送受信波の往復伝播時間に基づいて、ターゲットの距離を算出するとともに、ターゲットが極至近距離に到達した場合には、上述した位相パターンの繰り返しに基づいて、ターゲットの距離を算出する。本手法のベースは、ターゲットへの接近に伴い、同じ位相パターンが繰り返し出現するという知得に基づいている。
【0014】
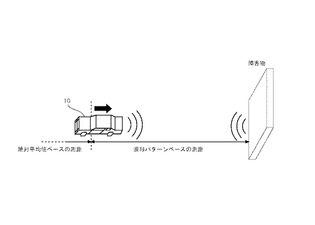
図3は、波形パターンを用いた測距の説明図であり、測距システム10を搭載した車両がバック走行により障害物に近づいていく様子を示す。また、図4は、位相パターンの推移を示す図であり、同図に示す”■”は、3つの積分値Vの大小関係をシンボル的に示したものである。
【0015】
位相パターンベースでの測距が開始される極至近距離に至るまでは、差分波形の全体的な大きさによる絶対平均値ベースによる測距手法といったような通常の測距が行われる。この手法による測距は、差分波形の位相が確認できるまで継続される。そして、差分波形の位相パターンが特定可能な状態になった時点で、3つの積分値Vによる位相パターンによる測距に移行する。
【0016】
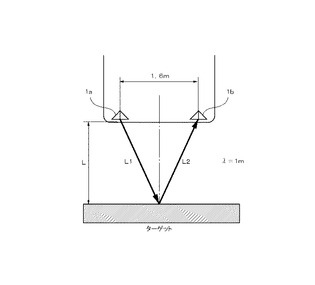
位相パターンによる測距では、車両がターゲット(障害物)に近づくにつれて、例えば、図4(a)から図4(f)のように位相パターンが経時的に推移する。そして、ちょうど波形1周期分近づいた時点で、同図(f)から同図(a)に戻り、更に近づくにつれて同図(a)から同図(f)のように位相パターンが再び推移する。ここで、図5に示すように、送受信アンテナ1a、1bの間隔を一例として1.6mとする。波長λが例えば1mの場合、経路長(L1+L2)が1m短くなると位相が1周期分だけ進む。位相パターンによる測距の開始時、他の測距手法によって距離Lが既知である場合(例えばL=1.5m)、以下の数式1からL1,L2が共に1.7mとなり、経路長(L1+L2)が3.4mとなる。
(数式1)
L1=L2=√(L2+(1.6/2)2)=1.7(m)
【0017】
この時点における位相パターン(以下、「基準位相パターン」という)が例えば同図(a)の場合、ターゲットに近づくにつれて同図(a)から同図(f)に次第に変化していく。そして、再び同図(a)の基準位相パターンに戻るのは、経路長(L1+L2)が3.4mから波長λ(=1m)分だけ小さくなった2.4mになるときである。ここで、L1=L2=1.2mなので、以下の数式2からL≒0.89mとなる。
(数式2)
L=√(L12−(1.6/2)2)≒0.89(m)
【0018】
すなわち、基準位相パターンが1周期分ずれるのは、この段階では距離Lの変化量が0.61(=1.5−0.89)の場合である。そして、その後は再び同図(f)の状態に向かって経時的に推移していく。
【0019】
ターゲットが極至近距離に存在する場合、車両はゆっくり移動するはずである。したがって、上述したような基準位相パターンの繰り返し回数(出現回数)をモニタリングすることで、現時点での距離Lを算出することができる。そして、車両がターゲットに更に近づいた場合、同図(a)の基準位相パターンに戻るのは、経路長(L1+L2)が1.4mになった時点であるが、アンテナ間距離が1.6mなので、実際に経路長が1.4mになることはない。経路長が1.6mになった時点で距離Lは0mである。また、その際には、経路長1.6mに対応した位相パターンが観測される。
【0020】
なお、上述した説明は、送受信アンテナ1a、1bが別体化されているケースに関するが、これらが一体化されている場合には、L1=L2=Lなので、経路長が1m変化すると、すなわち、ターゲットまでの距離Lが0.5m変化すると、位相が1周期進むことになる。
【0021】
このように、本実施形態では、ターゲットの既知の距離において出現した受信波形の位相パターンを基準位相パターンとして特定し、ターゲットの距離の変化に応じた、基準位相パターンの繰り返しに着目する。基準位相パターンは、波長が既知であることを条件として、波形が1周期進む毎に出現するので、この繰り返しをモニタリングすることで、既知の距離からの変化量も一義的に特定される。したがって、ターゲットの現在の距離を算出することができ、極至近距離の測距が可能になる。
【0022】
なお、上述した実施形態では、受信波形(差分波形)の時間軸上に設定される区間の数は3つであったが、本発明はこれに限定されるものではない。
【0023】
また、上述した実施形態では、基準位相パターンの繰り返し回数のみに着目して、波長の1周期単位の分解能で距離Lを算出するケースについて説明した。しかしながら、本発明はこれに限定されるものではなく、現時点の位相パターン(これは、基準位相パターンのみならず、基準位相パターンの繰返過程で出現する中間的な位相パターンも含む)を考慮してもよい。例えば、図4のケースにおいて、同図(a)が基準位相パターンである場合、この基準位相パターンが再び出現するまでの過程において、同図(b)〜(f)の順で位相パターンが順次出現し、同図(a)〜(f)の位相パターンが繰り返される。したがって、基準位相パターン以降に出現する位相パターンの推移を特定するとともに、波長1周期分における距離Lの変化量を位相パターンの個数で按分する。そして、現在の位相パターンが基準位相パターンから何番目であるかを特定することで、1周期単位の分解能よりも細かな精度で距離Lを算出することができる。
【図面の簡単な説明】
【0024】
【図1】測距システムの構成図
【図2】受信波形に関する波形図
【図3】波形パターンを用いた測距の説明図
【図4】波形パターンの推移を示す図
【図5】距離算出の説明図
【符号の説明】
【0025】
1 パルスレーダ
1a 送信アンテナ
1b 受信アンテナ
2 記憶部
3 判定部
4 測距部
5 バックスイッチ
6 ユーザインターフェース
10 測距システム
【技術分野】
【0001】
本発明は、ターゲットでの反射によって得られる受信波を用いた測距システムに関する。
【背景技術】
【0002】
一般に、パルスレーダでは、送信されたパルス信号が測拒対象となるターゲットで反射し受信されるまでの往復伝播時間に基づいて、ターゲットの距離が算出される。特許文献1には、パルスを広帯域で外部へ送信し、広帯域で受信した受信波形を広帯域のサンプリングパルスでサンプリングする等価時間サンプリングパルスレーダが開示されている。ここで、等価時間サンプリングとは、短周期の繰り返し信号をこれよりも周期の長い長周期の繰り返し信号へと変換する処理をいう。短周期の繰り返し信号に対し、この繰り返し周期よりも十分に大きい一定の時間間隔(フレーム周期)内で、周期毎に1点ずつサンプリングし、かつ、サンプリング時刻を繰り返し信号の繰り返し点からシフトさせる。このようなシフト処理は、時間走査と呼ばれている。これにより、短周期の繰り返し信号は、時間軸上において伸張され、同一の波形を有する長周期の信号に変換されるので、分解能(レーダでは距離分解能)の向上を図ることができる。
【0003】
【特許文献1】特表平10−511182号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
本発明の目的は、極至近距離の測距を可能にする新規な測距手法を提供することである。
【課題を解決するための手段】
【0005】
かかる課題を解決するために、本発明は、外部へ送信された送信波のうち、ターゲットで反射された受信波を受信するとともに、この受信波に所定の処理を施すことによって受信波形を出力するパルスレーダと、受信波形を時間軸上で複数の区間に分割し、分割された区間のそれぞれにおける受信波形の積分値の大小関係に基づいて、受信波形の位相パターンを判定する判定部と、ターゲットの既知の距離において出現する位相パターンを特定するとともに、この特定された位相パターンの繰り返しに基づいて、既知の距離からの変化量を算出することによって、ターゲットの現在の距離を算出する測距部とを有する測距システムを提供する。
【0006】
ここで、本発明において、受信アンテナに入力された受信波に含まれるノイズ成分を除去するための基準波形を記憶する記憶部をさらに有していてもよい。この場合、パルスレーダは、受信アンテナに入力された入力波形と、記憶部より読み出された基準波形との差分を算出することによって、受信波形を生成することが好ましい。
【発明の効果】
【0007】
本発明では、ターゲットの既知の距離において出現した受信波形の位相パターンを特定し、ターゲットの距離の変化に応じた、その位相パターンの繰り返しに着目する。この位相パターンは、波長が既知であることを条件として、受信波形が1周期進む毎に出現するので、この繰り返しをモニタリングすることで、既知の距離からの変化量も一義的に特定されるので、ターゲットの現在の距離を算出することができる。本発明によれば、極至近距離の測距が可能になるという効果がある。
【発明を実施するための最良の形態】
【0008】
図1は、本実施形態に係る測距システム10の構成図である。この測距システム10は、自動車等の車両に搭載され、車両後進時(バック時)に、車両後方のターゲット(障害物)をモニタリングするために用いられる。測距システム10は、パルスレーダ1と、記憶部2と、判定部3と、測距部4と、バックスイッチ5と、ユーザインターフェース6とを主体に構成されている。ここで、バックスイッチ5は、変速段が「R」に入れられたことを検出するスイッチである。また、ユーザインターフェース6は、ターゲットまでの距離に応じた警報をドライバに通知するための装置であり、具体的には、スピーカやディスプレイが挙げられる。
【0009】
パルスレーダ1は、一般的なパルスレーダと同様、外部へパルス(送信波)を送信し、自車両の近傍周辺に存在するターゲットにて反射したパルス(受信波)を受信する。本実施形態では、距離分解能の向上を図るべく、等価時間サンプリング法が用いられる。なお、詳細については後述するが、極至近距離では、本実施形態の特徴的な測距手法として、受信波形の位相パターンの繰り返しに基づいた測距が行われる。パルスレーダ1は、外部へパルス(例えば波長=1m)を送信するための送信アンテナ1aと、外部からパルスを受信するための受信アンテナ1bとを有する。送信アンテナ1aおよび受信アンテナ1bは、それぞれ別個に設けてもよいが、送受信機能を兼ね備えた1本のアンテナとしてもよい。
【0010】
ターゲットでの反射によって得られる受信波は、等価時間サンプリングによって時間軸上で伸張され、これによって入力波形が得られる。アナログ波である所定長の入力波形に対して、アナログ/デジタル変換が施され、離散的な値0〜255のデジタル波が生成される。入力波形の時間的な間隔は、例えば25msに設定することができる。なお、1本のアンテナで送受信アンテナ1a,1bを兼用する場合には、送信パルスと受信パルスとを時間的または周波数的に分離する処理が必要となる。
【0011】
記憶部2には、受信波に含まれるノイズ成分を除去するための基準波形が記憶されている。このような基準波形としては、例えば、測距システム10の起動時に、受信アンテナ1bに入力された入力波形を用いることができる。ここで、「測距システム10の起動時」とは、測距システム10への電源供給が行われ、測距システム10の動作が開始される時点をいい、本実施形態では、バックスイッチ5がオンになった時点である。この時点では、自車両(測距システム10)の後方近傍にターゲットが実際に存在するか否かに関わりなく、システム処理上、このようなターゲットが存在しないものとして取り扱われる。ターゲットが存在しないとみなせる状態としては、例えば、車両周辺にターゲットが存在しない状態(例えば、路上が平坦な状態)、車両周辺にターゲットが存在しても走行に支障がない状態(路上に小石等がある状態)等が挙げられる。記憶部2のデバイスとしては、データの保持に電力を必要としない不揮発性メモリが用いられる。これにより、システム停止後(電源供給停止後)であっても、基準波形が消去されることなく保持される。パルスレーダ1は、測距システム10の起動時以降のタイミングにおいて、図2(a)に示すように、受信アンテナ1bに入力された入力波形と、記憶部2に記憶された基準波形との差分を求めることによって、差分波形を生成する。以下の処理では、測距のために用いられる受信波形として、この差分波形が用いられる。
【0012】
判定部3は、極至近距離の測距において重要な役割を担っており、差分波形の積分(絶対値ベース)に基づいて、差分波形の位相パターンを判定する。そのために、パルスレーダ1によって生成された差分波形に対して、次のような処理が行われる。まず、同図(a)に示したように、差分波形が時間軸上で複数の区間A〜Cに分割される。具体的には、所定期間の後半部分に、同一の区間幅を有する3つの区間A〜Cが設定される。区間A〜Cを後半部分に設定する理由は、ターゲットが測距システム10から離れるほど受信タイミングが遅れる点を考慮したものであり、1フレーム期間の後半部分は、ターゲットによって反射されたパルスが顕著に表れやすい領域だからである。つぎに、各区間A〜Cにおいて、差分波形が積分・平均され、積分値V(A),V(B),V(C)が算出される。同図(b)に示すように、ある区間における差分波形の振幅が大きいほど、その区間における積分値Vも大きくなる。すなわち、これらの積分値Vの具体的な値は、差分波形の位相の変化に追従して、随時変化する。つぎに、区間A〜C毎に算出された3つの積分値Vの大小関係が判定され、この大小関係に基づいて、区間A〜Cの全体における差分波形の位相パターン(V(A)<V(C)<V(B))が特定される。
【0013】
測距部4は、極至近距離以外の場合には、送受信波の往復伝播時間に基づいて、ターゲットの距離を算出するとともに、ターゲットが極至近距離に到達した場合には、上述した位相パターンの繰り返しに基づいて、ターゲットの距離を算出する。本手法のベースは、ターゲットへの接近に伴い、同じ位相パターンが繰り返し出現するという知得に基づいている。
【0014】
図3は、波形パターンを用いた測距の説明図であり、測距システム10を搭載した車両がバック走行により障害物に近づいていく様子を示す。また、図4は、位相パターンの推移を示す図であり、同図に示す”■”は、3つの積分値Vの大小関係をシンボル的に示したものである。
【0015】
位相パターンベースでの測距が開始される極至近距離に至るまでは、差分波形の全体的な大きさによる絶対平均値ベースによる測距手法といったような通常の測距が行われる。この手法による測距は、差分波形の位相が確認できるまで継続される。そして、差分波形の位相パターンが特定可能な状態になった時点で、3つの積分値Vによる位相パターンによる測距に移行する。
【0016】
位相パターンによる測距では、車両がターゲット(障害物)に近づくにつれて、例えば、図4(a)から図4(f)のように位相パターンが経時的に推移する。そして、ちょうど波形1周期分近づいた時点で、同図(f)から同図(a)に戻り、更に近づくにつれて同図(a)から同図(f)のように位相パターンが再び推移する。ここで、図5に示すように、送受信アンテナ1a、1bの間隔を一例として1.6mとする。波長λが例えば1mの場合、経路長(L1+L2)が1m短くなると位相が1周期分だけ進む。位相パターンによる測距の開始時、他の測距手法によって距離Lが既知である場合(例えばL=1.5m)、以下の数式1からL1,L2が共に1.7mとなり、経路長(L1+L2)が3.4mとなる。
(数式1)
L1=L2=√(L2+(1.6/2)2)=1.7(m)
【0017】
この時点における位相パターン(以下、「基準位相パターン」という)が例えば同図(a)の場合、ターゲットに近づくにつれて同図(a)から同図(f)に次第に変化していく。そして、再び同図(a)の基準位相パターンに戻るのは、経路長(L1+L2)が3.4mから波長λ(=1m)分だけ小さくなった2.4mになるときである。ここで、L1=L2=1.2mなので、以下の数式2からL≒0.89mとなる。
(数式2)
L=√(L12−(1.6/2)2)≒0.89(m)
【0018】
すなわち、基準位相パターンが1周期分ずれるのは、この段階では距離Lの変化量が0.61(=1.5−0.89)の場合である。そして、その後は再び同図(f)の状態に向かって経時的に推移していく。
【0019】
ターゲットが極至近距離に存在する場合、車両はゆっくり移動するはずである。したがって、上述したような基準位相パターンの繰り返し回数(出現回数)をモニタリングすることで、現時点での距離Lを算出することができる。そして、車両がターゲットに更に近づいた場合、同図(a)の基準位相パターンに戻るのは、経路長(L1+L2)が1.4mになった時点であるが、アンテナ間距離が1.6mなので、実際に経路長が1.4mになることはない。経路長が1.6mになった時点で距離Lは0mである。また、その際には、経路長1.6mに対応した位相パターンが観測される。
【0020】
なお、上述した説明は、送受信アンテナ1a、1bが別体化されているケースに関するが、これらが一体化されている場合には、L1=L2=Lなので、経路長が1m変化すると、すなわち、ターゲットまでの距離Lが0.5m変化すると、位相が1周期進むことになる。
【0021】
このように、本実施形態では、ターゲットの既知の距離において出現した受信波形の位相パターンを基準位相パターンとして特定し、ターゲットの距離の変化に応じた、基準位相パターンの繰り返しに着目する。基準位相パターンは、波長が既知であることを条件として、波形が1周期進む毎に出現するので、この繰り返しをモニタリングすることで、既知の距離からの変化量も一義的に特定される。したがって、ターゲットの現在の距離を算出することができ、極至近距離の測距が可能になる。
【0022】
なお、上述した実施形態では、受信波形(差分波形)の時間軸上に設定される区間の数は3つであったが、本発明はこれに限定されるものではない。
【0023】
また、上述した実施形態では、基準位相パターンの繰り返し回数のみに着目して、波長の1周期単位の分解能で距離Lを算出するケースについて説明した。しかしながら、本発明はこれに限定されるものではなく、現時点の位相パターン(これは、基準位相パターンのみならず、基準位相パターンの繰返過程で出現する中間的な位相パターンも含む)を考慮してもよい。例えば、図4のケースにおいて、同図(a)が基準位相パターンである場合、この基準位相パターンが再び出現するまでの過程において、同図(b)〜(f)の順で位相パターンが順次出現し、同図(a)〜(f)の位相パターンが繰り返される。したがって、基準位相パターン以降に出現する位相パターンの推移を特定するとともに、波長1周期分における距離Lの変化量を位相パターンの個数で按分する。そして、現在の位相パターンが基準位相パターンから何番目であるかを特定することで、1周期単位の分解能よりも細かな精度で距離Lを算出することができる。
【図面の簡単な説明】
【0024】
【図1】測距システムの構成図
【図2】受信波形に関する波形図
【図3】波形パターンを用いた測距の説明図
【図4】波形パターンの推移を示す図
【図5】距離算出の説明図
【符号の説明】
【0025】
1 パルスレーダ
1a 送信アンテナ
1b 受信アンテナ
2 記憶部
3 判定部
4 測距部
5 バックスイッチ
6 ユーザインターフェース
10 測距システム
【特許請求の範囲】
【請求項1】
測距システムにおいて、
外部へ送信された送信波のうち、ターゲットで反射された受信波を受信するとともに、当該受信波に所定の処理を施すことによって受信波形を出力するパルスレーダと、
前記受信波形を時間軸上で複数の区間に分割し、当該区間のそれぞれにおける前記受信波形の積分値の大小関係に基づいて、前記受信波形の位相パターンを判定する判定部と、
前記ターゲットの既知の距離において出現する前記位相パターンを特定するとともに、当該特定された位相パターンの繰り返しに基づいて、前記既知の距離からの変化量を算出することによって、前記ターゲットの現在の距離を算出する測距部と
を有することを特徴とする測距システム。
【請求項2】
受信アンテナに入力された前記受信波に含まれるノイズ成分を除去するための基準波形を記憶する記憶部をさらに有し、
前記パルスレーダは、受信アンテナに入力された入力波形と、前記記憶部より読み出された前記基準波形との差分を算出することによって、前記受信波形を生成することを特徴とする請求項1に記載された測距システム。
【請求項1】
測距システムにおいて、
外部へ送信された送信波のうち、ターゲットで反射された受信波を受信するとともに、当該受信波に所定の処理を施すことによって受信波形を出力するパルスレーダと、
前記受信波形を時間軸上で複数の区間に分割し、当該区間のそれぞれにおける前記受信波形の積分値の大小関係に基づいて、前記受信波形の位相パターンを判定する判定部と、
前記ターゲットの既知の距離において出現する前記位相パターンを特定するとともに、当該特定された位相パターンの繰り返しに基づいて、前記既知の距離からの変化量を算出することによって、前記ターゲットの現在の距離を算出する測距部と
を有することを特徴とする測距システム。
【請求項2】
受信アンテナに入力された前記受信波に含まれるノイズ成分を除去するための基準波形を記憶する記憶部をさらに有し、
前記パルスレーダは、受信アンテナに入力された入力波形と、前記記憶部より読み出された前記基準波形との差分を算出することによって、前記受信波形を生成することを特徴とする請求項1に記載された測距システム。
【図1】


【図2】
【図3】
【図4】

【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−71728(P2010−71728A)
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願番号】特願2008−237686(P2008−237686)
【出願日】平成20年9月17日(2008.9.17)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成22年4月2日(2010.4.2)
【国際特許分類】
【出願日】平成20年9月17日(2008.9.17)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]