
測距方法および装置
【課題】変調光位相差方式により距離を測定する際の誤測距を防止する。
【解決手段】発光部10から一定の周期Tで強度変調された変調光L1が被写体Sに対して射出される。被写体Sから反射した反射変調光L2が受光ユニット20において受光され、第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号γが各受光素子22a〜22dにより取得されていく。その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが判定され、差分ΔWが設定値Aより小さいとき、4種類の各検出信号α〜γを用いて変調光L1と反射変調光L2との位相差Δφが検出され、この位相差Δφを用いて被写体までの距離dが算出される。一方、差分ΔWが設定値A以上であるブロックBRが存在するとき、位相差Δφの検出が行われず距離演算は行われない。
【解決手段】発光部10から一定の周期Tで強度変調された変調光L1が被写体Sに対して射出される。被写体Sから反射した反射変調光L2が受光ユニット20において受光され、第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号γが各受光素子22a〜22dにより取得されていく。その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが判定され、差分ΔWが設定値Aより小さいとき、4種類の各検出信号α〜γを用いて変調光L1と反射変調光L2との位相差Δφが検出され、この位相差Δφを用いて被写体までの距離dが算出される。一方、差分ΔWが設定値A以上であるブロックBRが存在するとき、位相差Δφの検出が行われず距離演算は行われない。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、変調光位相差方式(TOF:time of flight)により被写体までの距離を測定する測距方法および装置に関するものである。
【背景技術】
【0002】
従来から被写体までの距離を測定する方法として変調光位相差方式(TOF:time of flight)の測距装置が知られている(たとえば特許文献1、2参照)。この変調光位相差方式とは光強度を変調させた変調光を被写体に照射し、被写体からの反射変調光を受光しときの変調光と反射変調光との位相差を検出して被写体までの距離を測定するものである。ここで、特許文献1、2においては、変調光の位相が0°、90°、180°、270°であるときに、それぞれ反射変調光の光量をサンプリングすることにより、位相の異なる複数の測定値を取得する。そして、4種類の位相の異なる測定値に基づいて被検出物までの距離情報が演算される。
【特許文献1】特許第3758618号
【特許文献2】特許第3723215号
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、特許文献1、2において、各検出信号を検出するときに受光部に外光が入った場合、検出信号が反射変調光のみの光量を示すものではなくなり、距離の算出を誤ってしまうという問題がある。また、複数の画素を用いて4種類の検出信号を取得するとき、複数の画素が異なる測定対象の位置から反射した反射変調光を受光している場合があり、この場合も距離の算出を誤ってしまうという問題がある。
【0004】
そこで、本発明は、誤測距を防止することができる測距方法および装置を提供することを目的とするものである。
【課題を解決するための手段】
【0005】
本発明の測距方法は、一定の周期で光強度を変調させた変調光を射出し、射出した変調光が被写体に照射されたときの被写体からの反射変調光を受光することにより、反射変調光から変調光の位相π/2毎に第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得し、取得した第1検出信号と第3検出信号との第1の和と、第2検出信号と第4検出信号との第2の和とを算出するとともに、第1の和と第2の和との差分が設定値よりも小さいか否かを判定し、第1の和と第2の和との差分が設定値よりも小さいと判定されたときに、受光部において取得された4種類の検出信号を用いて変調光と反射変調光との位相差を検出し、検出した位相差から被写体距離を算出することを特徴とするものである。
【0006】
本発明の測距装置は、一定の周期で光強度を変調させた変調光を射出する発光部と、発光部から射出した変調光が被写体に照射されたときの被写体からの反射変調光を受光することにより、反射変調光から変調光の位相π/2毎に第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得する受光部と、受光部により取得された第1検出信号と第3検出信号との第1の和と、第2検出信号と第4検出信号との第2の和とを算出するとともに、第1の和と第2の和との差分が設定値よりも小さいか否かを判定する判定部と、判定部において第1の和と第2の和との差分が設定値よりも小さいと判定されたときに、受光部において取得された4種類の検出信号を用いて変調光と反射変調光との位相差を検出する位相差検出部と、位相差検出部により検出された位相差から被写体距離を算出する距離算出部とを備えたことを特徴とするものである。
【0007】
ここで、各検出信号は、それぞれ変調光の位相π/2(1/4周期)毎に取得されたものであれば露光時間は問わない。
【0008】
また、受光部は、4種類の検出信号を取得するものであればその構成を問わず、たとえば 第1検出信号を取得する第1受光素子と、第2検出信号を取得する第2受光素子と、第3検出信号を取得する第3受光素子と、第4検出信号を取得する第4受光素子とを有し、4種類の検出信号を有する1つのフレーム画像を各受光素子から取得するものであってもよい。このとき、判定部は、1つのフレーム画像内の4つの受光素子を1ブロックとし、ブロック毎に得られた4種類の検出信号を用いて第1の和と第2の和の差分が設定値よりも小さいか否かを判定し、距離算出部は各ブロック毎に距離を算出する。
【0009】
あるいは、受光部は、第1受光素子と第2受光素子とを有し、2種類の検出信号を有するフレーム画像を第1受光素子と第2受光素子とから取得するとともに、互いに種類の異なる2枚のフレーム画像を取得することにより4種類の検出信号を取得するものであってもよい。このとき、判定部は、第1受光素子と第2受光素子とを1つのブロックとし、ブロック毎に得られた4種類の検出信号を用いて第1の和と第2の和との差分が設定値よりも小さいか否かを判定し、距離算出部は各ブロック毎に距離を算出する。
【0010】
もしくは、受光部は、2次元上に配列された複数の受光素子を有し、各受光素子において同一種類の検出信号を取得したときのフレーム画像を4枚取得することにより4種類の検出信号を取得するものであってもよい。このとき、判定部は、各受光素子毎に得られた4種類の検出信号を用いて第1の和と第2の和との差分が設定値よりも小さいか否かを判定し、距離算出部が各受光素子毎に距離を算出する。
【0011】
また、判定部は、予め定められた設定値を有しているものであってもよいし、第1の和と第2の和とのうちいずれか大きい値の所定割合を設定値として設定するものであってもよいし、第1の和と第2の和との平均値の所定割合を設定値として設定するものであってもよい。
【発明の効果】
【0012】
本発明の測距方法および装置によれば、一定の周期で光強度を変調させた変調光を射出し、射出した変調光が被写体に照射されたときの被写体からの反射変調光を受光することにより、反射変調光から変調光の位相π/2毎に第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得し、取得した第1検出信号と第3検出信号との第1の和と、第2検出信号と第4検出信号との第2の和とを算出するとともに、第1の和と第2の和との差分が設定値よりも小さいか否かを判定し、第1の和と第2の和との差分が設定値よりも小さいと判定されたときに、受光部において取得された4種類の検出信号を用いて変調光と反射変調光との位相差を検出し、検出した位相差から被写体距離を算出することにより、たとえば受光部に外光が入った状態で取得された検出信号や被写体の異なる位置から反射した反射変調光から取得された検出信号のように、4種類の検出信号のうちいずれかが異常な信号になったときには距離算出を行わないようにすることができ、誤測距を防止することができる。
【0013】
なお、受光部が、第1検出信号を取得する第1受光素子と、第2検出信号を取得する第2受光素子と、第3検出信号を取得する第3受光素子と、第4検出信号を取得する第4受光素子とを有し、4種類の検出信号を有する1つのフレーム画像を各受光素子から取得するものであり、判定部が、1つのフレーム画像内の4つの受光素子を1ブロックとし、ブロック毎に得られた4種類の検出信号を用いて第1の和と第2の和の差分が設定値よりも小さいか否かを判定するものであり、距離算出部が各ブロック毎に距離を算出するものであるとき、1つのフレーム画像から距離算出を行うことができるため、距離算出の高速化を図ることができる。
【0014】
また、受光部が、第1受光素子と第2受光素子とを有し、第1受光素子と第2受光素子とにおいて2種類の検出信号を取得したときのフレーム画像を取得するとともに、互いに種類の異なる2枚のフレーム画像を取得することにより4種類の検出信号を取得するものであり、判定部が、第1受光素子と第2受光素子とを1つのブロックとし、ブロック毎に得られた4種類の検出信号を用いて第1の和と第2の和との差分が設定値よりも小さいか否かを判定するものであり、距離算出部が各ブロック毎に距離を算出するものであれば、2枚のフレーム画像から2画素単位で距離を算出することができるため、高速で高解像度の距離画像を生成することができる。
【0015】
さらに、受光部が2次元上に配列された複数の受光素子を有し、各受光素子において同一種類の検出信号を取得したときのフレーム画像を4枚取得することにより4種類の検出信号を取得するものであり、判定部が、各受光素子毎に得られた4種類の検出信号を用いて第1の和と第2の和との差分が設定値よりも小さいか否かを判定するものであり、距離算出部が各受光素子毎に距離を算出するものであるとき、1つの受光素子から4種類の検出信号を取得して距離の算出を行うことができるため、高解像度の距離画像の生成を行うことができる。
【0016】
また、判定部が、第1の和と第2の和とのうちいずれか大きい値の所定割合を設定値として設定し、もしくは第1の和と第2の和との平均値の所定割合を設定値として設定するものであれば、たとえばショットノイズのように露光量に応じてばらつきが大きくなるノイズが存在した場合に適切な設定値を設定することができる。
【発明を実施するための最良の形態】
【0017】
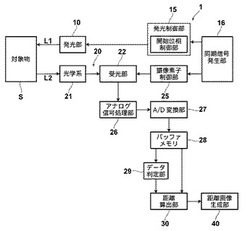
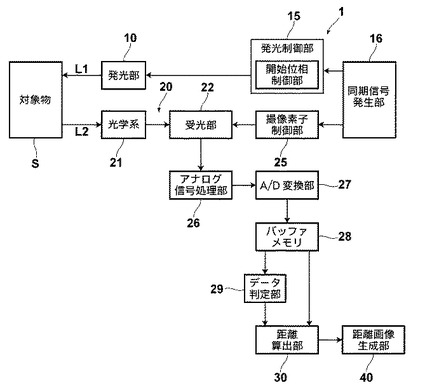
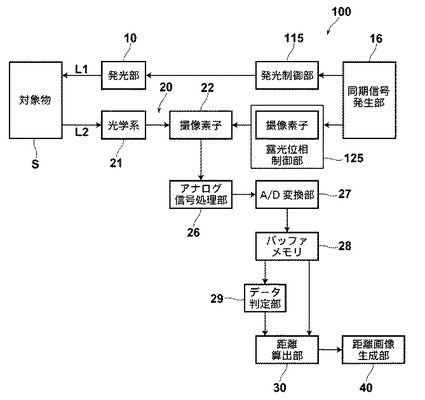
以下、図面を参照して本発明の測距装置の好ましい実施の形態を詳細に説明する。図1は本発明の測距装置の好ましい実施の形態を示すブロック図である。測距装置1はいわゆる位相差検出方式により被写体までの距離を測定するものであって、発光部10、受光ユニット20、距離算出部30、距離画像生成部40等を備えている。
【0018】
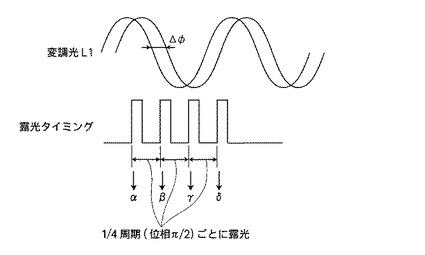
発光部10はたとえばLEDアレイ等からなっており、図2に示すような光の強度を一定の周期T(たとえばT=0.5ms、周波数20Hz)で変調した変調光L1を被写体に連続的に射出するものである。発光部10の動作は発光制御部15により制御されている。
【0019】
受光ユニット20は、変調光L1が被写体Sに照射されたときの被写体Sからの反射変調光L2を受光して第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号δを取得するものである。具体的には、受光ユニット20は光学系21、受光部22等を備えている。光学系21は複数の結像光学レンズ、絞り等からなり、被写体からの反射変調光L2を受光部22上に結像するものである。受光部22は光学系21により結像された反射変調光L2を受光するものであり、露光タイミングおよび露光時間は受光制御部25により制御されている。
【0020】
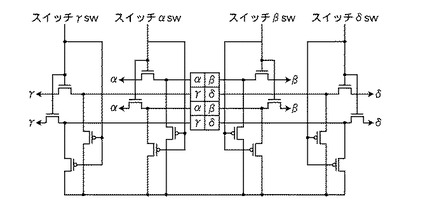
ここで、受光部22はたとえばCCD、CMOSセンサ等からなっており、図3は受光素子がCCDからなる場合の一例を示す模式図を示す。図3の受光部22は第1検出信号αを取得する第1受光素子22aと、第2検出信号βを取得する第2受光素子22bと、第3検出信号γを取得する第3受光素子22cと、第4検出信号δを取得する第4受光素子22dとを有している。各受光素子22a〜22dの露光時間および露光タイミングは受光制御部25により制御されている。具体的には、図4に示すように、各スイッチング素子αSW、βSW、γSW、δSWのスイッチング動作が受光制御部25により制御されており、各受光素子22a〜22dがそれぞれ対応した4種類の検出信号α〜δを出力するようになっている。
【0021】
このとき、発光制御部15と受光制御部25とには同期信号発生部16から変調光L1の射出と反射変調光L2の受光との同期を取るためにたとえば位相π/2毎に同期信号が入力される。そして、受光部22は同期信号が入力されたタイミングで各受光素子22a〜22dが露光を行う。一方、発光部10は同期信号が入力されたタイミングに合わせて変調光L1の発光開始位相を0°、90°、180°、270°というようにずらしながら発光を行う。これにより、受光部22における各受光素子22a〜22dが位相の異なる4種類の検出信号α〜δを取得することができる。
【0022】
また、受光部22は4種類の検出信号α〜δを出力する際、1枚のフレーム画像として出力するように受光制御部25により制御されている。つまり、受光部22から取得されるフレーム画像には4種類の検出信号α〜δが含まれている状態になっている。なお、出力されたフレーム画像は、アナログ信号処理部26によりアナログ信号処理され、A/D変換部27においてA/D変換された後、バッファメモリ28に蓄積される。
【0023】
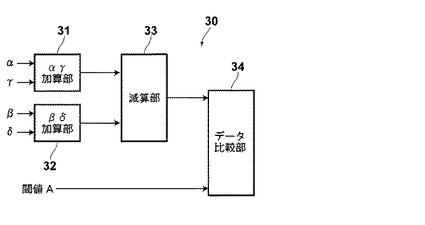
判定部29は、受光部22により取得された第1検出信号αと第3検出信号γとの第1の和W1と、第2検出信号βと第4検出信号δとの第2の和W2とを算出するとともに、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを判定するものである。具体的には、図5に示すように、第1の和W1を算出するαγ加算部31と、第2の和W2を算出するβδ加算部32と、第1の和W1と第2の和W2との差分ΔWを算出する減算部33と、算出した差分ΔWと閾値Aとを比較するデータ比較部34とを有している。
【0024】
ここで、変調光L1は一定の周期Tで強度変調しているものであるため、反射変調光L2もまた一定の周期で強度変調している。4種類の検出信号α〜δは変調光L1の位相π/2(1/4周期)毎に取得されたものであるため、第1の和W1と第2の和W2とは下記式(1)〜(5)に示すように原理的に等しくなる。
【数1】

【0025】
上記式(1)〜(5)において、反射変調光L2=q(sin x + m)、qは被写体の反射率、nは定常的な外光を示す。
【0026】
一方、たとえば受光部22に外光が入った状態で4種類の検出信号α〜δが取得されたとき、外光成分だけ検出信号は大きくなる。あるいは被写体の異なる位置から反射した反射変調光から検出信号が取得されたとき反射率qが違った検出信号は他の検出信号に比べて大きく(もしくは小さく)なる。つまり、正常な状態で取得された4種類の検出信号α〜δには上記式(5)の関係が成立し、異常な状態で取得された4種類の検出信号α〜δはにα+γ≠β+δとなる。
【0027】
そこで、判定部29は第1の和W1と第2の和W2とを算出し、その差分ΔWが設定値Aよりも小さいものであるか否かを判定する。そして、差分ΔWが設定値Aよりも小さいとき正常な検出信号の取得が行われたと判定し、差分ΔWが設定値A以上であるとき、外的要因により異常な検出信号が取得されたと判定する。
【0028】
なお、図3に示すような1フレーム画像として4種類の検出信号α〜δを取得したとき、判定部29は後述する距離dの算出に用いる各ブロックBRの4種類の検出信号α〜δに対してそれぞれ判定を行う。
【0029】
距離算出部30は、判定部29において差分ΔWが設定値Aよりも小さいと判定された場合のみ、受光部22が取得した第1検出信号αと第2検出信号βと第3検出信号γとを用いて変調光L1と反射変調光L2との位相差Δφを検出し距離dを算出する。つまり、反射変調光L2は変調光L1に対し被写体までの距離に応じて位相がずれた状態で検出されるものであり(図2参照)、距離算出部30はこの位相差Δφを検出する。なお、変調光L1と反射変調光L2との位相が2πだけずれたときには両者は同位相になるため、変調光L1の波長λが距離を測定することができる最大測定距離になる。
【0030】
具体的には、変調光L1と反射変調光L2との位相がずれているとき、その位相差Δφは4種類の検出信号α〜δの信号値の差となって表れ、距離算出部30は下記式(6)により位相差Δφを検出することができる。
【数2】
【0031】
ここで、距離算出部30は、図3の受光部22においてブロックBRを構成する隣接した4つの受光素子22a〜22dにおいて取得された4種類の検出信号α〜δを用いて各ブロックBR毎に位相差Δφを検出する。
【0032】
そして、距離算出部30は各ブロックBR毎に検出された位相差Δφから被写体までの距離dを算出する。被写体Sまでの距離dは下記式(7)に示すことができる。
【0033】
d=cΔφ/4πf ・・・(7)
ここで、cは光速、fは変調光L1の周波数(f=1/T)である。距離算出部30は、距離算出部30により検出された位相差Δφを式(7)に代入することにより被写体までの距離dを算出する。なお、距離算出部30は、判定部29において差分が設定値A以上であると判定された場合、正しい位相差の検出および距離の算出を行うことができないとして位相差Δφの検出を行わない。
【0034】
距離画像生成部40は、距離算出部30により各ブロックBR毎に算出された距離dを用いて距離画像を生成するものである。なお、距離画像を生成する際に、所定のブロックBRについては判定部29の判定により距離dが算出されていない場合がある。このときには、距離画像生成部40はたとえばスプライン補完等の公知の画素補完方法により距離画像の画素値を補完する。
【0035】
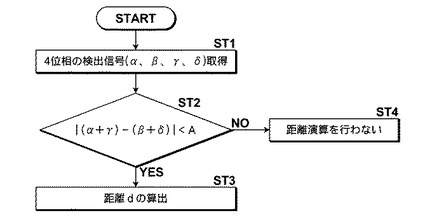
図6は本発明の測距方法の好ましい実施形態を示すフローチャートであり、図1から図6を参照して測距方法について説明する。まず、発光部10から一定の周期Tで強度変調された変調光L1が被写体Sに対して射出される。そして、被写体Sから反射した反射変調光L2が受光ユニット20において受光される。このとき、同期信号発生部16から発生する同期信号に基づいて変調光L1の位相変調開始タイミングおよび露光タイミングが制御され、それぞれ第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号γが各受光素子22a〜22dにより取得されていく(ステップST1)。
【0036】
その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが判定される(ステップST2)。差分ΔWが設定値Aより小さいとき、距離算出部30において4種類の各検出信号α〜γを用いて上記式(6)により変調光L1と反射変調光L2との位相差Δφが検出され、この位相差Δφを用いて上記式(7)により被写体までの距離dが各ブロックBR毎に算出される(ステップST3)。その後、距離画像生成部40により距離画像Pが作成される。一方、差分ΔWが設定値A以上であるブロックBRが存在するとき、当該ブロックBRについての距離算出部30による位相差Δφの検出が行われず、距離演算は行われない(ステップST4)。
【0037】
このように、たとえば受光部22に外光が入った状態で取得された検出信号や被写体の異なる位置から反射した反射変調光L2から取得された検出信号のように、4種類の検出信号のうちいずれかが異常な信号になったときには距離算出を行わないようにすることができ、誤測距を防止することができる。
【0038】
特に、受光部22が図3に示すように、各受光素子22a毎に異なる検出信号α〜δを受光することにより、受光部22から1フレーム画像を取得することにより1フレーム分の距離画像を作成することができるため、高速に距離画像の作成を行うことができる。
【0039】
なお、図1の受光部22が一定の受光タイミングで露光を行うものであり、受光部22の受光タイミングに合わせて発光部10が変調光L1を発光する場合について例示しているが、図7に示すように、発光部10が一定の周期で連続的に変調光L1を射出するものであり、受光部22が所定の周期(位相)から検出信号を検出するように受光タイミングを制御するようにしてもよい。
【0040】
図8〜図13は本発明の測距装置に用いる受光部の別の実施形態を示す模式図であり、図8〜図13を参照して受光部122、222、322、422についてそれぞれ説明する。なお、図8〜図13に示す受光部122、222、322、422は図1の測距装置1の受光部22に代えて適用されるものである。
【0041】
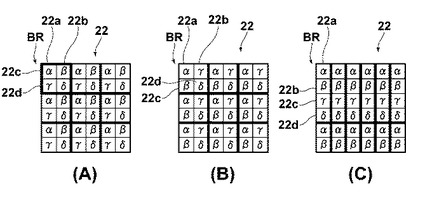
図8〜図11の受光部122、222、322は、それぞれ第1受光素子と第2受光素子とを有し、第1受光素子と第2受光素子とから2種類の検出信号を取得したときのフレーム画像を2枚取得することにより4種類の検出信号を取得するものである。
【0042】
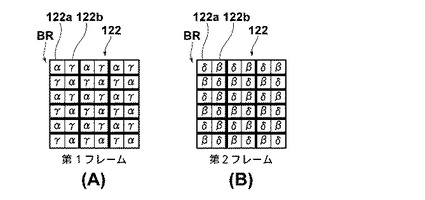
具体的には、図8の受光部122は、第1検出信号αと第3検出信号γとを取得する第1受光素子122aと、第2検出信号βと第4検出信号δとを取得する第2受光素子122bとを備えており、隣接する第1受光素子122aと第2受光素子122bとが1つのブロックを形成している。そして、図9に示すように、受光部122はたとえば第1フレーム画像から第1検出信号αと第3検出信号γとを取得し(ステップST11、図8(A)参照)、第2フレームの画像から第2検出信号βと第4検出信号δとを取得する(ステップST12、図8(B)参照)。
【0043】
その後、判定部29は第1フレーム画像から第1の和W1を算出し第2フレーム画像から第2の和W2を算出することにより、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを各ブロックBR毎に判定する(ステップST13)。そして、判定部29において設定値Aより小さいと判定されたとき、距離算出部30は位相差Δφの検出し距離算出部30は距離dの算出を行う(ステップST14)。一方、差分ΔWが設定値A以上であるブロックBRについては位相差Δφの検出および距離dの算出は行わない(ステップST15)。
【0044】
このように、第1フレーム画像から第1検出信号αおよび第3検出信号γを取得し、第2フレーム画像から第2検出信号βおよび第4検出信号δを取得することにより、2つのフレーム画像を取得すれば距離画像を生成するため、距離画像を高速に生成することができる。さらに、2つの受光素子122a、122b分の受光面積から1つの距離dを算出することができるため、解像度の高い距離画像を生成することができる。
【0045】
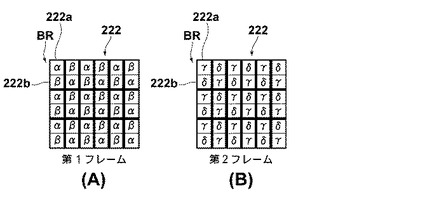
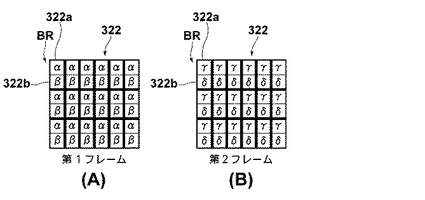
ここで、図8においては、第1フレームで第1検出信号αと第3検出信号γを取得し、第2フレームで第2検出信号βと第4検出信号δとを取得する場合について例示しているが、図10(A)、11(A)に示すように第1フレーム画像において第1検出信号αと第2検出信号βとを取得し、図10(B)、11(B)に示すように第2フレーム画像において第3検出信号γと第4検出信号δとを取得するようにしてもよい。なお、図10の第1受光素子222aおよび第2受光素子222bは水平方向および垂直方向において交互に配列されている。一方、図11の第1受光素子322aおよび第2受光素子322bは垂直方向に向かってストライプ状に配列されており、この場合にはいわゆるフィールドインターレース方式によりフレーム画像(フィールド画像)を取得することにより、各検出信号α〜δを取得することができる。
【0046】
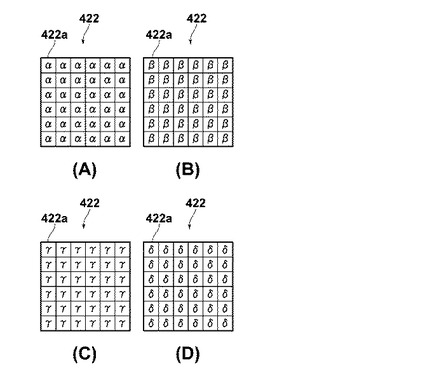
さらに、図12(A)〜(D)に示すように、受光部422が2次元上に配列された複数の受光素子422aを有し、各受光素子422aにおいて同一種類の検出信号を取得したときのフレーム画像を4枚取得することにより4種類の検出信号α〜δが取得される。なお、図12においては各受光素子422aがそれぞれ1つのブロックBRを形成することになる。
【0047】
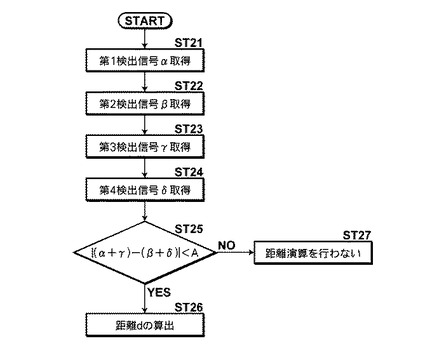
具体的には、図13に示すように、受光部422の各受光素子422aが第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号δをフレーム画像毎にそれぞれ取得する(ステップST21〜ST24、図12(A)〜(D)参照)。その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが各受光素子422a毎に判定され(ステップST25)、設定値Aより小さいときに位相差Δφの検出および距離dの算出が行われる(ステップST26)。一方、差分ΔWが設定値A以上である各受光素子422aについては位相差Δφの検出および距離dの算出は行わない(ステップST27)。
【0048】
これにより、各受光素子422a毎に4種類の検出信号α〜δを取得し、各受光素子422a毎に距離dを算出することができるため、最も高解像度の距離画像を生成することができる。
【0049】
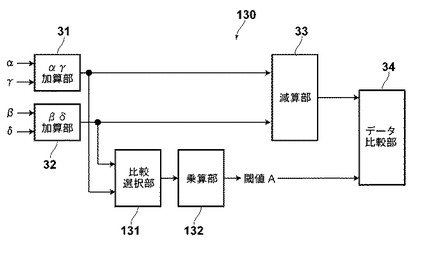
図14は本発明の測距装置における判定部の別の実施形態を示す模式図であり、図14を参照して判定部130について説明する。なお、図14の判定部130において図5の判定部29と同一の構成を有する部位には同一の符号を付してその説明を省略する。図14の判定部130が図5の判定部29と異なる点は、設定値Aの設定方法である。
【0050】
図14において、判定部130は比較選択部131および乗算部132を有している。比較選択部131は第1の和W1と第2の和W2のうちいずれか大きい方を選択するものであり、乗算部132は比較選択部131により選択された和の所定割合の値を設定値Aとして設定するものである。なお、図14において比較選択部131が設けられている場合について例示しているが、比較選択部131を省略し、乗算部132において第1の和W1と第2の和W2の平均値の所定割合の値を設定値Aとしてもよい。また、上述した設定値Aは各ブロックBR毎に設定される。
【0051】
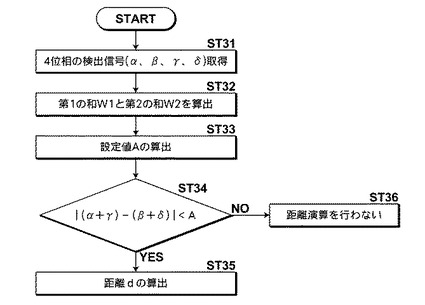
したがって、図15に示すように、4種類の検出信号α〜δが取得された後(ステップST)、各ブロックBR毎に第1の和W1と第2の和W2とが算出される(ステップST32)。そして、第1の和W1もしくは第2の和W2のいずれか大きい方の所定割合の値、もしくは第1の和W1と第2の和W2の平均値の所定割合の値が設定値Aとして算出される(ステップST33)。その後、判定部130において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが各ブロックBR毎に判定され(ステップST34)、設定値Aより小さいときに位相差Δφの検出および距離dの算出が行われる(ステップST35)。一方、差分ΔWが設定値A以上であるブロックBRについては位相差Δφの検出および距離dの算出は行わない(ステップST36)。
【0052】
これにより、実際に取得した4種類の検出信号α〜δの信号値(輝度)に応じて設定値Aを設定することができるため、ショットノイズのように露光量に応じてばらつきが大きくなるノイズが存在した場合に適切な設定値Aを設定することができる。
【0053】
上記各実施の形態によれば、一定の周期Tで光強度を変調させた変調光L1を射出し、射出した変調光L1が被写体Sに照射されたときの被写体Sからの反射変調光L2を受光することにより、反射変調光L2から変調光L1の位相π/2毎に第1検出信号αと第2検出信号βと第2検出信号γと第4検出信号δとを取得し、取得した第1検出信号αと第2検出信号γとの第1の和W1と、第2検出信号βと第4検出信号δとの第2の和W2とを算出するとともに、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを判定し、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいと判定されたときに、受光部22において取得された4種類の検出信号α〜δを用いて変調光L1と反射変調光L2との位相差Δφを検出し、検出した位相差Δφから被写体距離dを算出することにより、たとえば受光部22に外光が入った状態で取得された検出信号や被写体Sの異なる位置から反射した反射変調光L2から取得された検出信号のように、4種類の検出信号α〜δのうちいずれかが異常な信号になったときには距離算出を行わないようにすることができ、誤測距を防止することができる。
【0054】
なお、図3に示すように、受光部22が、第1検出信号αを取得する第1受光素子22aと、第2検出信号βを取得する第2受光素子22bと、第2検出信号γを取得する第3受光素子22cと、第4検出信号δを取得する第4受光素子22dとを有し、各受光素子22a〜22dから各検出信号α〜δを1フレーム画像として取得するものであり、判定部29が、1つのフレーム画像内の4つの受光素子22a〜22dを1ブロックBRとし、ブロックBR毎に得られた4種類の検出信号α〜δを用いて第1の和W1と第2の和W1の差分ΔWが設定値Aよりも小さいか否かを判定するものであり、距離算出部30が各ブロックBR毎に距離を算出するものであるとき、1つのフレーム画像から距離算出を行うことができるため、距離算出の高速化を図ることができる。
【0055】
また、図8〜図11に示すように、受光部122、222、322が、受光部が、第1受光素子122a〜322aと第2受光素子122b〜322bとを有し、第1受光素子122a〜322aと第2受光素子122b〜322bとにおいて2種類の検出信号(α、γ)、(β、δ)もしくは(α、β)、(γ、δ)を取得したときのフレーム画像を取得するとともに、互いに種類の異なる2枚のフレーム画像を取得することにより4種類の検出信号α〜δを取得するものであり、判定部29が、第1受光素子122a〜322aと第2受光素子122b〜322bとを1つのブロックBRとし、ブロックBR毎に得られた4種類の検出信号α〜δを用いて第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを判定するものであり、距離算出部30が各ブロックBR毎に距離を算出するものであれば、2枚のフレーム画像から2画素単位で距離を算出することができるため、高速で高解像度の距離画像を生成することができる。
【0056】
さらに、図12、図13に示すように、受光部422が2次元上に配列された複数の受光素子422aを有し、複数の受光素子422aから各検出信号α〜δをそれぞれ1フレーム画像として取得するものであり、判定部29が、各検出信号α〜δ毎に取得される4フレーム画像を用いて各受光素子422a毎に第1の和W1と第2の和W2とを算出するとともに、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを判定するものであり、距離算出部30が、4フレーム画像を用いて各受光素子422a毎に位相差Δφを検出するものであるとき、1つの受光素子422aから4種類の検出信号α〜δを取得して距離の算出を行うことができるため、高解像度の距離画像の生成を行うことができる。
【0057】
本発明の実施形態は上記実施形態に限定されない。たとえば、上記各実施形態において、距離画像の生成する場合について例示しているが、距離画像の生成までは行わず、対象物までの距離を算出し出力する場合についても適用することができる。
【0058】
また、受光素子22a〜22dの配列パターンについて4種類の検出信号α〜δを取得するものであれば図3に示す配列パターン以外であってもよいが、被写体の略同一もしくは近接した位置からの反射変調光L2から距離dを算出するために、4つの受光素子22a〜22dは隣接していることが望ましい。
【図面の簡単な説明】
【0059】
【図1】本発明の測距装置の第1の実施形態を示すブロック図
【図2】図1の測距装置において射出される変調光および被写体からの反射変調光の一例を示すグラフ
【図3】図1の測距装置における受光素子の一例を示す模式図
【図4】図3の受光素子におけるスイッチング構造を示す模式図
【図5】図1の測距装置における判定部の一例を示すブロック図
【図6】本発明の測距方法の好ましい実施形態を示すフローチャート
【図7】本発明の測距装置の別の実施形態を示すブロック図
【図8】本発明の測距装置における受光素子の別の実施形態を示す模式図
【図9】図8の受光素子を用いたときの測距方法の一例を示すフローチャート
【図10】本発明の測距装置における受光素子の別の実施形態を示す模式図
【図11】本発明の測距装置における受光素子の別の実施形態を示す模式図
【図12】本発明の測距装置における受光素子の別の実施形態を示す模式図
【図13】図12の受光素子を用いたときの測距方法の一例を示すフローチャート
【図14】本発明の測距装置における判定部の別の一例を示すブロック図
【図15】図14の判定部を用いたときの測距方法の一例を示すフローチャート
【符号の説明】
【0060】
1 測距装置
10 発光部
15 発光制御部
16 同期信号発生部
20 受光ユニット
22、122、222、322、422 受光部
22a、122a 第1受光素子
22b、122b 第2受光素子
22c 第3受光素子
22d 第4受光素子
29、130 判定部
30 位相差検出部
40 距離算出部
50 距離画像生成部
A 閾値
d 距離
L1 変調光
L2 反射変調光
S 被写体
T 周期
W1 第1の和
W2 第2の和
α 第1検出信号
β 第2検出信号
γ 第3検出信号
δ 第4検出信号
ΔW 差分
Δφ 位相差
【技術分野】
【0001】
本発明は、変調光位相差方式(TOF:time of flight)により被写体までの距離を測定する測距方法および装置に関するものである。
【背景技術】
【0002】
従来から被写体までの距離を測定する方法として変調光位相差方式(TOF:time of flight)の測距装置が知られている(たとえば特許文献1、2参照)。この変調光位相差方式とは光強度を変調させた変調光を被写体に照射し、被写体からの反射変調光を受光しときの変調光と反射変調光との位相差を検出して被写体までの距離を測定するものである。ここで、特許文献1、2においては、変調光の位相が0°、90°、180°、270°であるときに、それぞれ反射変調光の光量をサンプリングすることにより、位相の異なる複数の測定値を取得する。そして、4種類の位相の異なる測定値に基づいて被検出物までの距離情報が演算される。
【特許文献1】特許第3758618号
【特許文献2】特許第3723215号
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、特許文献1、2において、各検出信号を検出するときに受光部に外光が入った場合、検出信号が反射変調光のみの光量を示すものではなくなり、距離の算出を誤ってしまうという問題がある。また、複数の画素を用いて4種類の検出信号を取得するとき、複数の画素が異なる測定対象の位置から反射した反射変調光を受光している場合があり、この場合も距離の算出を誤ってしまうという問題がある。
【0004】
そこで、本発明は、誤測距を防止することができる測距方法および装置を提供することを目的とするものである。
【課題を解決するための手段】
【0005】
本発明の測距方法は、一定の周期で光強度を変調させた変調光を射出し、射出した変調光が被写体に照射されたときの被写体からの反射変調光を受光することにより、反射変調光から変調光の位相π/2毎に第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得し、取得した第1検出信号と第3検出信号との第1の和と、第2検出信号と第4検出信号との第2の和とを算出するとともに、第1の和と第2の和との差分が設定値よりも小さいか否かを判定し、第1の和と第2の和との差分が設定値よりも小さいと判定されたときに、受光部において取得された4種類の検出信号を用いて変調光と反射変調光との位相差を検出し、検出した位相差から被写体距離を算出することを特徴とするものである。
【0006】
本発明の測距装置は、一定の周期で光強度を変調させた変調光を射出する発光部と、発光部から射出した変調光が被写体に照射されたときの被写体からの反射変調光を受光することにより、反射変調光から変調光の位相π/2毎に第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得する受光部と、受光部により取得された第1検出信号と第3検出信号との第1の和と、第2検出信号と第4検出信号との第2の和とを算出するとともに、第1の和と第2の和との差分が設定値よりも小さいか否かを判定する判定部と、判定部において第1の和と第2の和との差分が設定値よりも小さいと判定されたときに、受光部において取得された4種類の検出信号を用いて変調光と反射変調光との位相差を検出する位相差検出部と、位相差検出部により検出された位相差から被写体距離を算出する距離算出部とを備えたことを特徴とするものである。
【0007】
ここで、各検出信号は、それぞれ変調光の位相π/2(1/4周期)毎に取得されたものであれば露光時間は問わない。
【0008】
また、受光部は、4種類の検出信号を取得するものであればその構成を問わず、たとえば 第1検出信号を取得する第1受光素子と、第2検出信号を取得する第2受光素子と、第3検出信号を取得する第3受光素子と、第4検出信号を取得する第4受光素子とを有し、4種類の検出信号を有する1つのフレーム画像を各受光素子から取得するものであってもよい。このとき、判定部は、1つのフレーム画像内の4つの受光素子を1ブロックとし、ブロック毎に得られた4種類の検出信号を用いて第1の和と第2の和の差分が設定値よりも小さいか否かを判定し、距離算出部は各ブロック毎に距離を算出する。
【0009】
あるいは、受光部は、第1受光素子と第2受光素子とを有し、2種類の検出信号を有するフレーム画像を第1受光素子と第2受光素子とから取得するとともに、互いに種類の異なる2枚のフレーム画像を取得することにより4種類の検出信号を取得するものであってもよい。このとき、判定部は、第1受光素子と第2受光素子とを1つのブロックとし、ブロック毎に得られた4種類の検出信号を用いて第1の和と第2の和との差分が設定値よりも小さいか否かを判定し、距離算出部は各ブロック毎に距離を算出する。
【0010】
もしくは、受光部は、2次元上に配列された複数の受光素子を有し、各受光素子において同一種類の検出信号を取得したときのフレーム画像を4枚取得することにより4種類の検出信号を取得するものであってもよい。このとき、判定部は、各受光素子毎に得られた4種類の検出信号を用いて第1の和と第2の和との差分が設定値よりも小さいか否かを判定し、距離算出部が各受光素子毎に距離を算出する。
【0011】
また、判定部は、予め定められた設定値を有しているものであってもよいし、第1の和と第2の和とのうちいずれか大きい値の所定割合を設定値として設定するものであってもよいし、第1の和と第2の和との平均値の所定割合を設定値として設定するものであってもよい。
【発明の効果】
【0012】
本発明の測距方法および装置によれば、一定の周期で光強度を変調させた変調光を射出し、射出した変調光が被写体に照射されたときの被写体からの反射変調光を受光することにより、反射変調光から変調光の位相π/2毎に第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得し、取得した第1検出信号と第3検出信号との第1の和と、第2検出信号と第4検出信号との第2の和とを算出するとともに、第1の和と第2の和との差分が設定値よりも小さいか否かを判定し、第1の和と第2の和との差分が設定値よりも小さいと判定されたときに、受光部において取得された4種類の検出信号を用いて変調光と反射変調光との位相差を検出し、検出した位相差から被写体距離を算出することにより、たとえば受光部に外光が入った状態で取得された検出信号や被写体の異なる位置から反射した反射変調光から取得された検出信号のように、4種類の検出信号のうちいずれかが異常な信号になったときには距離算出を行わないようにすることができ、誤測距を防止することができる。
【0013】
なお、受光部が、第1検出信号を取得する第1受光素子と、第2検出信号を取得する第2受光素子と、第3検出信号を取得する第3受光素子と、第4検出信号を取得する第4受光素子とを有し、4種類の検出信号を有する1つのフレーム画像を各受光素子から取得するものであり、判定部が、1つのフレーム画像内の4つの受光素子を1ブロックとし、ブロック毎に得られた4種類の検出信号を用いて第1の和と第2の和の差分が設定値よりも小さいか否かを判定するものであり、距離算出部が各ブロック毎に距離を算出するものであるとき、1つのフレーム画像から距離算出を行うことができるため、距離算出の高速化を図ることができる。
【0014】
また、受光部が、第1受光素子と第2受光素子とを有し、第1受光素子と第2受光素子とにおいて2種類の検出信号を取得したときのフレーム画像を取得するとともに、互いに種類の異なる2枚のフレーム画像を取得することにより4種類の検出信号を取得するものであり、判定部が、第1受光素子と第2受光素子とを1つのブロックとし、ブロック毎に得られた4種類の検出信号を用いて第1の和と第2の和との差分が設定値よりも小さいか否かを判定するものであり、距離算出部が各ブロック毎に距離を算出するものであれば、2枚のフレーム画像から2画素単位で距離を算出することができるため、高速で高解像度の距離画像を生成することができる。
【0015】
さらに、受光部が2次元上に配列された複数の受光素子を有し、各受光素子において同一種類の検出信号を取得したときのフレーム画像を4枚取得することにより4種類の検出信号を取得するものであり、判定部が、各受光素子毎に得られた4種類の検出信号を用いて第1の和と第2の和との差分が設定値よりも小さいか否かを判定するものであり、距離算出部が各受光素子毎に距離を算出するものであるとき、1つの受光素子から4種類の検出信号を取得して距離の算出を行うことができるため、高解像度の距離画像の生成を行うことができる。
【0016】
また、判定部が、第1の和と第2の和とのうちいずれか大きい値の所定割合を設定値として設定し、もしくは第1の和と第2の和との平均値の所定割合を設定値として設定するものであれば、たとえばショットノイズのように露光量に応じてばらつきが大きくなるノイズが存在した場合に適切な設定値を設定することができる。
【発明を実施するための最良の形態】
【0017】
以下、図面を参照して本発明の測距装置の好ましい実施の形態を詳細に説明する。図1は本発明の測距装置の好ましい実施の形態を示すブロック図である。測距装置1はいわゆる位相差検出方式により被写体までの距離を測定するものであって、発光部10、受光ユニット20、距離算出部30、距離画像生成部40等を備えている。
【0018】
発光部10はたとえばLEDアレイ等からなっており、図2に示すような光の強度を一定の周期T(たとえばT=0.5ms、周波数20Hz)で変調した変調光L1を被写体に連続的に射出するものである。発光部10の動作は発光制御部15により制御されている。
【0019】
受光ユニット20は、変調光L1が被写体Sに照射されたときの被写体Sからの反射変調光L2を受光して第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号δを取得するものである。具体的には、受光ユニット20は光学系21、受光部22等を備えている。光学系21は複数の結像光学レンズ、絞り等からなり、被写体からの反射変調光L2を受光部22上に結像するものである。受光部22は光学系21により結像された反射変調光L2を受光するものであり、露光タイミングおよび露光時間は受光制御部25により制御されている。
【0020】
ここで、受光部22はたとえばCCD、CMOSセンサ等からなっており、図3は受光素子がCCDからなる場合の一例を示す模式図を示す。図3の受光部22は第1検出信号αを取得する第1受光素子22aと、第2検出信号βを取得する第2受光素子22bと、第3検出信号γを取得する第3受光素子22cと、第4検出信号δを取得する第4受光素子22dとを有している。各受光素子22a〜22dの露光時間および露光タイミングは受光制御部25により制御されている。具体的には、図4に示すように、各スイッチング素子αSW、βSW、γSW、δSWのスイッチング動作が受光制御部25により制御されており、各受光素子22a〜22dがそれぞれ対応した4種類の検出信号α〜δを出力するようになっている。
【0021】
このとき、発光制御部15と受光制御部25とには同期信号発生部16から変調光L1の射出と反射変調光L2の受光との同期を取るためにたとえば位相π/2毎に同期信号が入力される。そして、受光部22は同期信号が入力されたタイミングで各受光素子22a〜22dが露光を行う。一方、発光部10は同期信号が入力されたタイミングに合わせて変調光L1の発光開始位相を0°、90°、180°、270°というようにずらしながら発光を行う。これにより、受光部22における各受光素子22a〜22dが位相の異なる4種類の検出信号α〜δを取得することができる。
【0022】
また、受光部22は4種類の検出信号α〜δを出力する際、1枚のフレーム画像として出力するように受光制御部25により制御されている。つまり、受光部22から取得されるフレーム画像には4種類の検出信号α〜δが含まれている状態になっている。なお、出力されたフレーム画像は、アナログ信号処理部26によりアナログ信号処理され、A/D変換部27においてA/D変換された後、バッファメモリ28に蓄積される。
【0023】
判定部29は、受光部22により取得された第1検出信号αと第3検出信号γとの第1の和W1と、第2検出信号βと第4検出信号δとの第2の和W2とを算出するとともに、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを判定するものである。具体的には、図5に示すように、第1の和W1を算出するαγ加算部31と、第2の和W2を算出するβδ加算部32と、第1の和W1と第2の和W2との差分ΔWを算出する減算部33と、算出した差分ΔWと閾値Aとを比較するデータ比較部34とを有している。
【0024】
ここで、変調光L1は一定の周期Tで強度変調しているものであるため、反射変調光L2もまた一定の周期で強度変調している。4種類の検出信号α〜δは変調光L1の位相π/2(1/4周期)毎に取得されたものであるため、第1の和W1と第2の和W2とは下記式(1)〜(5)に示すように原理的に等しくなる。
【数1】
【0025】
上記式(1)〜(5)において、反射変調光L2=q(sin x + m)、qは被写体の反射率、nは定常的な外光を示す。
【0026】
一方、たとえば受光部22に外光が入った状態で4種類の検出信号α〜δが取得されたとき、外光成分だけ検出信号は大きくなる。あるいは被写体の異なる位置から反射した反射変調光から検出信号が取得されたとき反射率qが違った検出信号は他の検出信号に比べて大きく(もしくは小さく)なる。つまり、正常な状態で取得された4種類の検出信号α〜δには上記式(5)の関係が成立し、異常な状態で取得された4種類の検出信号α〜δはにα+γ≠β+δとなる。
【0027】
そこで、判定部29は第1の和W1と第2の和W2とを算出し、その差分ΔWが設定値Aよりも小さいものであるか否かを判定する。そして、差分ΔWが設定値Aよりも小さいとき正常な検出信号の取得が行われたと判定し、差分ΔWが設定値A以上であるとき、外的要因により異常な検出信号が取得されたと判定する。
【0028】
なお、図3に示すような1フレーム画像として4種類の検出信号α〜δを取得したとき、判定部29は後述する距離dの算出に用いる各ブロックBRの4種類の検出信号α〜δに対してそれぞれ判定を行う。
【0029】
距離算出部30は、判定部29において差分ΔWが設定値Aよりも小さいと判定された場合のみ、受光部22が取得した第1検出信号αと第2検出信号βと第3検出信号γとを用いて変調光L1と反射変調光L2との位相差Δφを検出し距離dを算出する。つまり、反射変調光L2は変調光L1に対し被写体までの距離に応じて位相がずれた状態で検出されるものであり(図2参照)、距離算出部30はこの位相差Δφを検出する。なお、変調光L1と反射変調光L2との位相が2πだけずれたときには両者は同位相になるため、変調光L1の波長λが距離を測定することができる最大測定距離になる。
【0030】
具体的には、変調光L1と反射変調光L2との位相がずれているとき、その位相差Δφは4種類の検出信号α〜δの信号値の差となって表れ、距離算出部30は下記式(6)により位相差Δφを検出することができる。
【数2】
【0031】
ここで、距離算出部30は、図3の受光部22においてブロックBRを構成する隣接した4つの受光素子22a〜22dにおいて取得された4種類の検出信号α〜δを用いて各ブロックBR毎に位相差Δφを検出する。
【0032】
そして、距離算出部30は各ブロックBR毎に検出された位相差Δφから被写体までの距離dを算出する。被写体Sまでの距離dは下記式(7)に示すことができる。
【0033】
d=cΔφ/4πf ・・・(7)
ここで、cは光速、fは変調光L1の周波数(f=1/T)である。距離算出部30は、距離算出部30により検出された位相差Δφを式(7)に代入することにより被写体までの距離dを算出する。なお、距離算出部30は、判定部29において差分が設定値A以上であると判定された場合、正しい位相差の検出および距離の算出を行うことができないとして位相差Δφの検出を行わない。
【0034】
距離画像生成部40は、距離算出部30により各ブロックBR毎に算出された距離dを用いて距離画像を生成するものである。なお、距離画像を生成する際に、所定のブロックBRについては判定部29の判定により距離dが算出されていない場合がある。このときには、距離画像生成部40はたとえばスプライン補完等の公知の画素補完方法により距離画像の画素値を補完する。
【0035】
図6は本発明の測距方法の好ましい実施形態を示すフローチャートであり、図1から図6を参照して測距方法について説明する。まず、発光部10から一定の周期Tで強度変調された変調光L1が被写体Sに対して射出される。そして、被写体Sから反射した反射変調光L2が受光ユニット20において受光される。このとき、同期信号発生部16から発生する同期信号に基づいて変調光L1の位相変調開始タイミングおよび露光タイミングが制御され、それぞれ第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号γが各受光素子22a〜22dにより取得されていく(ステップST1)。
【0036】
その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが判定される(ステップST2)。差分ΔWが設定値Aより小さいとき、距離算出部30において4種類の各検出信号α〜γを用いて上記式(6)により変調光L1と反射変調光L2との位相差Δφが検出され、この位相差Δφを用いて上記式(7)により被写体までの距離dが各ブロックBR毎に算出される(ステップST3)。その後、距離画像生成部40により距離画像Pが作成される。一方、差分ΔWが設定値A以上であるブロックBRが存在するとき、当該ブロックBRについての距離算出部30による位相差Δφの検出が行われず、距離演算は行われない(ステップST4)。
【0037】
このように、たとえば受光部22に外光が入った状態で取得された検出信号や被写体の異なる位置から反射した反射変調光L2から取得された検出信号のように、4種類の検出信号のうちいずれかが異常な信号になったときには距離算出を行わないようにすることができ、誤測距を防止することができる。
【0038】
特に、受光部22が図3に示すように、各受光素子22a毎に異なる検出信号α〜δを受光することにより、受光部22から1フレーム画像を取得することにより1フレーム分の距離画像を作成することができるため、高速に距離画像の作成を行うことができる。
【0039】
なお、図1の受光部22が一定の受光タイミングで露光を行うものであり、受光部22の受光タイミングに合わせて発光部10が変調光L1を発光する場合について例示しているが、図7に示すように、発光部10が一定の周期で連続的に変調光L1を射出するものであり、受光部22が所定の周期(位相)から検出信号を検出するように受光タイミングを制御するようにしてもよい。
【0040】
図8〜図13は本発明の測距装置に用いる受光部の別の実施形態を示す模式図であり、図8〜図13を参照して受光部122、222、322、422についてそれぞれ説明する。なお、図8〜図13に示す受光部122、222、322、422は図1の測距装置1の受光部22に代えて適用されるものである。
【0041】
図8〜図11の受光部122、222、322は、それぞれ第1受光素子と第2受光素子とを有し、第1受光素子と第2受光素子とから2種類の検出信号を取得したときのフレーム画像を2枚取得することにより4種類の検出信号を取得するものである。
【0042】
具体的には、図8の受光部122は、第1検出信号αと第3検出信号γとを取得する第1受光素子122aと、第2検出信号βと第4検出信号δとを取得する第2受光素子122bとを備えており、隣接する第1受光素子122aと第2受光素子122bとが1つのブロックを形成している。そして、図9に示すように、受光部122はたとえば第1フレーム画像から第1検出信号αと第3検出信号γとを取得し(ステップST11、図8(A)参照)、第2フレームの画像から第2検出信号βと第4検出信号δとを取得する(ステップST12、図8(B)参照)。
【0043】
その後、判定部29は第1フレーム画像から第1の和W1を算出し第2フレーム画像から第2の和W2を算出することにより、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを各ブロックBR毎に判定する(ステップST13)。そして、判定部29において設定値Aより小さいと判定されたとき、距離算出部30は位相差Δφの検出し距離算出部30は距離dの算出を行う(ステップST14)。一方、差分ΔWが設定値A以上であるブロックBRについては位相差Δφの検出および距離dの算出は行わない(ステップST15)。
【0044】
このように、第1フレーム画像から第1検出信号αおよび第3検出信号γを取得し、第2フレーム画像から第2検出信号βおよび第4検出信号δを取得することにより、2つのフレーム画像を取得すれば距離画像を生成するため、距離画像を高速に生成することができる。さらに、2つの受光素子122a、122b分の受光面積から1つの距離dを算出することができるため、解像度の高い距離画像を生成することができる。
【0045】
ここで、図8においては、第1フレームで第1検出信号αと第3検出信号γを取得し、第2フレームで第2検出信号βと第4検出信号δとを取得する場合について例示しているが、図10(A)、11(A)に示すように第1フレーム画像において第1検出信号αと第2検出信号βとを取得し、図10(B)、11(B)に示すように第2フレーム画像において第3検出信号γと第4検出信号δとを取得するようにしてもよい。なお、図10の第1受光素子222aおよび第2受光素子222bは水平方向および垂直方向において交互に配列されている。一方、図11の第1受光素子322aおよび第2受光素子322bは垂直方向に向かってストライプ状に配列されており、この場合にはいわゆるフィールドインターレース方式によりフレーム画像(フィールド画像)を取得することにより、各検出信号α〜δを取得することができる。
【0046】
さらに、図12(A)〜(D)に示すように、受光部422が2次元上に配列された複数の受光素子422aを有し、各受光素子422aにおいて同一種類の検出信号を取得したときのフレーム画像を4枚取得することにより4種類の検出信号α〜δが取得される。なお、図12においては各受光素子422aがそれぞれ1つのブロックBRを形成することになる。
【0047】
具体的には、図13に示すように、受光部422の各受光素子422aが第1検出信号α、第2検出信号β、第3検出信号γ、第4検出信号δをフレーム画像毎にそれぞれ取得する(ステップST21〜ST24、図12(A)〜(D)参照)。その後、判定部29において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが各受光素子422a毎に判定され(ステップST25)、設定値Aより小さいときに位相差Δφの検出および距離dの算出が行われる(ステップST26)。一方、差分ΔWが設定値A以上である各受光素子422aについては位相差Δφの検出および距離dの算出は行わない(ステップST27)。
【0048】
これにより、各受光素子422a毎に4種類の検出信号α〜δを取得し、各受光素子422a毎に距離dを算出することができるため、最も高解像度の距離画像を生成することができる。
【0049】
図14は本発明の測距装置における判定部の別の実施形態を示す模式図であり、図14を参照して判定部130について説明する。なお、図14の判定部130において図5の判定部29と同一の構成を有する部位には同一の符号を付してその説明を省略する。図14の判定部130が図5の判定部29と異なる点は、設定値Aの設定方法である。
【0050】
図14において、判定部130は比較選択部131および乗算部132を有している。比較選択部131は第1の和W1と第2の和W2のうちいずれか大きい方を選択するものであり、乗算部132は比較選択部131により選択された和の所定割合の値を設定値Aとして設定するものである。なお、図14において比較選択部131が設けられている場合について例示しているが、比較選択部131を省略し、乗算部132において第1の和W1と第2の和W2の平均値の所定割合の値を設定値Aとしてもよい。また、上述した設定値Aは各ブロックBR毎に設定される。
【0051】
したがって、図15に示すように、4種類の検出信号α〜δが取得された後(ステップST)、各ブロックBR毎に第1の和W1と第2の和W2とが算出される(ステップST32)。そして、第1の和W1もしくは第2の和W2のいずれか大きい方の所定割合の値、もしくは第1の和W1と第2の和W2の平均値の所定割合の値が設定値Aとして算出される(ステップST33)。その後、判定部130において第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かが各ブロックBR毎に判定され(ステップST34)、設定値Aより小さいときに位相差Δφの検出および距離dの算出が行われる(ステップST35)。一方、差分ΔWが設定値A以上であるブロックBRについては位相差Δφの検出および距離dの算出は行わない(ステップST36)。
【0052】
これにより、実際に取得した4種類の検出信号α〜δの信号値(輝度)に応じて設定値Aを設定することができるため、ショットノイズのように露光量に応じてばらつきが大きくなるノイズが存在した場合に適切な設定値Aを設定することができる。
【0053】
上記各実施の形態によれば、一定の周期Tで光強度を変調させた変調光L1を射出し、射出した変調光L1が被写体Sに照射されたときの被写体Sからの反射変調光L2を受光することにより、反射変調光L2から変調光L1の位相π/2毎に第1検出信号αと第2検出信号βと第2検出信号γと第4検出信号δとを取得し、取得した第1検出信号αと第2検出信号γとの第1の和W1と、第2検出信号βと第4検出信号δとの第2の和W2とを算出するとともに、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを判定し、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいと判定されたときに、受光部22において取得された4種類の検出信号α〜δを用いて変調光L1と反射変調光L2との位相差Δφを検出し、検出した位相差Δφから被写体距離dを算出することにより、たとえば受光部22に外光が入った状態で取得された検出信号や被写体Sの異なる位置から反射した反射変調光L2から取得された検出信号のように、4種類の検出信号α〜δのうちいずれかが異常な信号になったときには距離算出を行わないようにすることができ、誤測距を防止することができる。
【0054】
なお、図3に示すように、受光部22が、第1検出信号αを取得する第1受光素子22aと、第2検出信号βを取得する第2受光素子22bと、第2検出信号γを取得する第3受光素子22cと、第4検出信号δを取得する第4受光素子22dとを有し、各受光素子22a〜22dから各検出信号α〜δを1フレーム画像として取得するものであり、判定部29が、1つのフレーム画像内の4つの受光素子22a〜22dを1ブロックBRとし、ブロックBR毎に得られた4種類の検出信号α〜δを用いて第1の和W1と第2の和W1の差分ΔWが設定値Aよりも小さいか否かを判定するものであり、距離算出部30が各ブロックBR毎に距離を算出するものであるとき、1つのフレーム画像から距離算出を行うことができるため、距離算出の高速化を図ることができる。
【0055】
また、図8〜図11に示すように、受光部122、222、322が、受光部が、第1受光素子122a〜322aと第2受光素子122b〜322bとを有し、第1受光素子122a〜322aと第2受光素子122b〜322bとにおいて2種類の検出信号(α、γ)、(β、δ)もしくは(α、β)、(γ、δ)を取得したときのフレーム画像を取得するとともに、互いに種類の異なる2枚のフレーム画像を取得することにより4種類の検出信号α〜δを取得するものであり、判定部29が、第1受光素子122a〜322aと第2受光素子122b〜322bとを1つのブロックBRとし、ブロックBR毎に得られた4種類の検出信号α〜δを用いて第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを判定するものであり、距離算出部30が各ブロックBR毎に距離を算出するものであれば、2枚のフレーム画像から2画素単位で距離を算出することができるため、高速で高解像度の距離画像を生成することができる。
【0056】
さらに、図12、図13に示すように、受光部422が2次元上に配列された複数の受光素子422aを有し、複数の受光素子422aから各検出信号α〜δをそれぞれ1フレーム画像として取得するものであり、判定部29が、各検出信号α〜δ毎に取得される4フレーム画像を用いて各受光素子422a毎に第1の和W1と第2の和W2とを算出するとともに、第1の和W1と第2の和W2との差分ΔWが設定値Aよりも小さいか否かを判定するものであり、距離算出部30が、4フレーム画像を用いて各受光素子422a毎に位相差Δφを検出するものであるとき、1つの受光素子422aから4種類の検出信号α〜δを取得して距離の算出を行うことができるため、高解像度の距離画像の生成を行うことができる。
【0057】
本発明の実施形態は上記実施形態に限定されない。たとえば、上記各実施形態において、距離画像の生成する場合について例示しているが、距離画像の生成までは行わず、対象物までの距離を算出し出力する場合についても適用することができる。
【0058】
また、受光素子22a〜22dの配列パターンについて4種類の検出信号α〜δを取得するものであれば図3に示す配列パターン以外であってもよいが、被写体の略同一もしくは近接した位置からの反射変調光L2から距離dを算出するために、4つの受光素子22a〜22dは隣接していることが望ましい。
【図面の簡単な説明】
【0059】
【図1】本発明の測距装置の第1の実施形態を示すブロック図
【図2】図1の測距装置において射出される変調光および被写体からの反射変調光の一例を示すグラフ
【図3】図1の測距装置における受光素子の一例を示す模式図
【図4】図3の受光素子におけるスイッチング構造を示す模式図
【図5】図1の測距装置における判定部の一例を示すブロック図
【図6】本発明の測距方法の好ましい実施形態を示すフローチャート
【図7】本発明の測距装置の別の実施形態を示すブロック図
【図8】本発明の測距装置における受光素子の別の実施形態を示す模式図
【図9】図8の受光素子を用いたときの測距方法の一例を示すフローチャート
【図10】本発明の測距装置における受光素子の別の実施形態を示す模式図
【図11】本発明の測距装置における受光素子の別の実施形態を示す模式図
【図12】本発明の測距装置における受光素子の別の実施形態を示す模式図
【図13】図12の受光素子を用いたときの測距方法の一例を示すフローチャート
【図14】本発明の測距装置における判定部の別の一例を示すブロック図
【図15】図14の判定部を用いたときの測距方法の一例を示すフローチャート
【符号の説明】
【0060】
1 測距装置
10 発光部
15 発光制御部
16 同期信号発生部
20 受光ユニット
22、122、222、322、422 受光部
22a、122a 第1受光素子
22b、122b 第2受光素子
22c 第3受光素子
22d 第4受光素子
29、130 判定部
30 位相差検出部
40 距離算出部
50 距離画像生成部
A 閾値
d 距離
L1 変調光
L2 反射変調光
S 被写体
T 周期
W1 第1の和
W2 第2の和
α 第1検出信号
β 第2検出信号
γ 第3検出信号
δ 第4検出信号
ΔW 差分
Δφ 位相差
【特許請求の範囲】
【請求項1】
一定の周期で光強度を変調させた変調光を射出し、
射出した前記変調光が被写体に照射されたときの該被写体からの反射変調光を受光することにより、該反射変調光から前記変調光の位相π/2毎にそれぞれ第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得し、
取得した前記第1検出信号と前記第3検出信号との第1の和と、前記第2検出信号と前記第4検出信号との第2の和とを算出するとともに、前記第1の和と前記第2の和との差分が設定値よりも小さいか否かを判定し、
前記第1の和と前記第2の和との差分が設定値よりも小さいと判定されたときに、取得した前記4種類の検出信号を用いて前記変調光と前記反射変調光との位相差を検出して被写体距離を算出する
ことを特徴とする測距方法。
【請求項2】
一定の周期で光強度を変調させた変調光を射出する発光部と、
該発光部から射出した前記変調光が被写体に照射されたときの該被写体からの反射変調光を受光することにより、該反射変調光から前記変調光の位相π/2毎に第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得する受光部と、
該受光部により取得された前記第1検出信号と前記第3検出信号との第1の和と、前記第2検出信号と前記第4検出信号との第2の和とを算出するとともに、前記第1の和と前記第2の和との差分が設定値よりも小さいか否かを判定する判定部と、
該判定部において前記第1の和と前記第2の和との差分が設定値よりも小さいと判定されたときに、該受光部において取得された前記4種類の検出信号を用いて前記変調光と前記反射変調光との位相差を検出して被写体距離を算出する距離算出部と
を備えたことを特徴とする測距装置。
【請求項3】
前記受光部が、前記第1検出信号を取得する第1受光素子と、前記第2検出信号を取得する第2受光素子と、前記第3検出信号を取得する第3受光素子と、前記第4検出信号を取得する第4受光素子とを有し、前記各受光素子から4種類の前記検出信号を1つのフレーム画像として取得するものであり、
前記判定部が、前記1つのフレーム画像内の4種類の前記受光素子を1ブロックとし、該ブロック毎に得られた4種類の前記検出信号を用いて前記第1の和と前記第2の和の差分が前記設定値よりも小さいか否かを判定するものであり、
前記距離算出部が前記各ブロック毎に距離を算出するものであることを特徴とする請求項2記載の測距装置。
【請求項4】
前記受光部が、それぞれ種類の異なる前記検出信号を取得する第1受光素子と第2受光素子とを有し、該第1受光素子と該第2受光素子とにおいて取得される2種類の前記検出信号を1つのフレーム画像として取得するとともに、互いに種類の異なる2枚の前記フレーム画像を取得することにより4種類の前記検出信号を取得するものであり、
前記判定部が、前記第1受光素子と前記第2受光素子とを1つのブロックとし、該ブロック毎に得られた4種類の前記検出信号を用いて前記第1の和と前記第2の和との差分が前記設定値よりも小さいか否かを判定するものであり、
前記距離算出部が前記各ブロック毎に距離を算出するものであることを特徴とする請求項2記載の測距装置。
【請求項5】
前記受光部が2次元上に配列された複数の受光素子を有し、該各受光素子において同一種類の前記検出信号を取得したときのフレーム画像を4枚取得することにより4種類の前記検出信号を取得するものであり、
前記判定部が、前記各受光素子毎に得られた4種類の前記検出信号を用いて前記第1の和と前記第2の和との差分が設定値よりも小さいか否かを判定するものであり、
前記距離算出部が各受光素子毎に距離を算出するものであることを特徴とする請求項2記載の測距装置。
【請求項6】
前記判定部が、前記第1の和と前記第2の和とのうちいずれか大きい値の所定割合を前記設定値として設定するものであることを特徴とする請求項2から5のいずれか1項記載の測距装置。
【請求項7】
前記判定部が、前記第1の和と前記第2の和との平均値の所定割合を前記設定値として設定するものであることを特徴とする請求項2から5のいずれか1項記載の測距装置。
【請求項1】
一定の周期で光強度を変調させた変調光を射出し、
射出した前記変調光が被写体に照射されたときの該被写体からの反射変調光を受光することにより、該反射変調光から前記変調光の位相π/2毎にそれぞれ第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得し、
取得した前記第1検出信号と前記第3検出信号との第1の和と、前記第2検出信号と前記第4検出信号との第2の和とを算出するとともに、前記第1の和と前記第2の和との差分が設定値よりも小さいか否かを判定し、
前記第1の和と前記第2の和との差分が設定値よりも小さいと判定されたときに、取得した前記4種類の検出信号を用いて前記変調光と前記反射変調光との位相差を検出して被写体距離を算出する
ことを特徴とする測距方法。
【請求項2】
一定の周期で光強度を変調させた変調光を射出する発光部と、
該発光部から射出した前記変調光が被写体に照射されたときの該被写体からの反射変調光を受光することにより、該反射変調光から前記変調光の位相π/2毎に第1検出信号と第2検出信号と第3検出信号と第4検出信号とを取得する受光部と、
該受光部により取得された前記第1検出信号と前記第3検出信号との第1の和と、前記第2検出信号と前記第4検出信号との第2の和とを算出するとともに、前記第1の和と前記第2の和との差分が設定値よりも小さいか否かを判定する判定部と、
該判定部において前記第1の和と前記第2の和との差分が設定値よりも小さいと判定されたときに、該受光部において取得された前記4種類の検出信号を用いて前記変調光と前記反射変調光との位相差を検出して被写体距離を算出する距離算出部と
を備えたことを特徴とする測距装置。
【請求項3】
前記受光部が、前記第1検出信号を取得する第1受光素子と、前記第2検出信号を取得する第2受光素子と、前記第3検出信号を取得する第3受光素子と、前記第4検出信号を取得する第4受光素子とを有し、前記各受光素子から4種類の前記検出信号を1つのフレーム画像として取得するものであり、
前記判定部が、前記1つのフレーム画像内の4種類の前記受光素子を1ブロックとし、該ブロック毎に得られた4種類の前記検出信号を用いて前記第1の和と前記第2の和の差分が前記設定値よりも小さいか否かを判定するものであり、
前記距離算出部が前記各ブロック毎に距離を算出するものであることを特徴とする請求項2記載の測距装置。
【請求項4】
前記受光部が、それぞれ種類の異なる前記検出信号を取得する第1受光素子と第2受光素子とを有し、該第1受光素子と該第2受光素子とにおいて取得される2種類の前記検出信号を1つのフレーム画像として取得するとともに、互いに種類の異なる2枚の前記フレーム画像を取得することにより4種類の前記検出信号を取得するものであり、
前記判定部が、前記第1受光素子と前記第2受光素子とを1つのブロックとし、該ブロック毎に得られた4種類の前記検出信号を用いて前記第1の和と前記第2の和との差分が前記設定値よりも小さいか否かを判定するものであり、
前記距離算出部が前記各ブロック毎に距離を算出するものであることを特徴とする請求項2記載の測距装置。
【請求項5】
前記受光部が2次元上に配列された複数の受光素子を有し、該各受光素子において同一種類の前記検出信号を取得したときのフレーム画像を4枚取得することにより4種類の前記検出信号を取得するものであり、
前記判定部が、前記各受光素子毎に得られた4種類の前記検出信号を用いて前記第1の和と前記第2の和との差分が設定値よりも小さいか否かを判定するものであり、
前記距離算出部が各受光素子毎に距離を算出するものであることを特徴とする請求項2記載の測距装置。
【請求項6】
前記判定部が、前記第1の和と前記第2の和とのうちいずれか大きい値の所定割合を前記設定値として設定するものであることを特徴とする請求項2から5のいずれか1項記載の測距装置。
【請求項7】
前記判定部が、前記第1の和と前記第2の和との平均値の所定割合を前記設定値として設定するものであることを特徴とする請求項2から5のいずれか1項記載の測距装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】

【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2009−79987(P2009−79987A)
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願番号】特願2007−249024(P2007−249024)
【出願日】平成19年9月26日(2007.9.26)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【復代理人】
【識別番号】100134245
【弁理士】
【氏名又は名称】本澤 大樹
【Fターム(参考)】
【公開日】平成21年4月16日(2009.4.16)
【国際特許分類】
【出願日】平成19年9月26日(2007.9.26)
【出願人】(306037311)富士フイルム株式会社 (25,513)
【復代理人】
【識別番号】100134245
【弁理士】
【氏名又は名称】本澤 大樹
【Fターム(参考)】
[ Back to top ]