
測距方法及び到達時間算出方法
【課題】赤外線カメラによる測距方法を提供する。
【解決手段】赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの赤外線熱画像を2値化し、2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、目標の候補を抽出し、設定された各ウインドウ内に含まれる画素について輝度値を積算し、目標候補が放つ熱量相当の輝度を算出し、輝度の積算値がフレーム毎に増加しているウインドウを選択して、目標を抽出し、目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
【解決手段】赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの赤外線熱画像を2値化し、2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、目標の候補を抽出し、設定された各ウインドウ内に含まれる画素について輝度値を積算し、目標候補が放つ熱量相当の輝度を算出し、輝度の積算値がフレーム毎に増加しているウインドウを選択して、目標を抽出し、目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明の実施形態は、赤外線カメラによる測距方法及び到達時間算出方法に関する。
【背景技術】
【0002】
一般に、対象物までの測距を行う測距方式として、対象物を撮像して得られた画像データを処理して、対象物までの距離を測定するものがある。例えば、対象物が移動している場合、画像処理と演算の周期毎の信号処理時間を短縮することが提案されている(例えば、特許文献1参照。)。
【0003】
対象物にレーザ光を照射し、対象物からの反射光を受光し、時間差から測距する測距装置は、装置規模や消費電力が大きくなっていた。そのため、測距装置を飛行体等に搭載するのは容易でない場合がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平4−203922号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、赤外線カメラの画像から自らに向かって飛翔してくる移動物体の目標を抽出し、その移動物体の到達時間を算出する測距方法及び到達時間算出方法を提供することにある。
【課題を解決するための手段】
【0006】
実施形態の測距方法は、赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、前記赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、前記閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの前記赤外線熱画像を2値化し、前記2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、前記目標の候補を抽出し、前記設定された各ウインドウ内に含まれる画素について輝度値を積算し、前記目標候補が放つ熱量相当の輝度を算出し、前記輝度の積算値がフレーム毎に増加している前記ウインドウを選択して、前記目標を抽出し、前記目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
【図面の簡単な説明】
【0007】
【図1】本実施形態に係る測距方法に使用する測距装置の構成を示す図である。
【図2】赤外線カメラ1による赤外線熱画像の一例を示す図である。
【図3】2値化した1フレーム画像の一例を示す図である。
【図4】ウインドウの一例を示す図である。
【図5】相対距離の算出を説明するための図である。
【発明を実施するための形態】
【0008】
以下、本発明の一実施の形態について、図面を参照して説明する。尚、各図において同一箇所については同一の符号を付すとともに、重複した説明は省略する。
【0009】
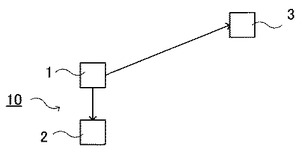
図1は、本実施形態に係る測距方法に使用する測距装置の構成を示す図である。本実施形態に係る測距方法に使用する測距装置10は、目標物3から出ている赤外線放射エネルギーを検出する赤外線カメラ1と、測距演算装置2から構成することができる。
【0010】
赤外線カメラ1は、目標物3から放射されている赤外線を検出し、得られた赤外線放射エネルギー量を温度に換算し、赤外線熱画像を表示する。
【0011】
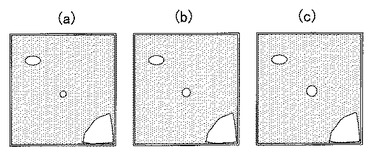
赤外線カメラ1による温度分布の表示画像は、画素数(検出素子数:例えば垂直方向240画素×水平方向320画素)に対応したマトリックスで構成されている。例えば、1画素のデータ量(データ深さ)は16ビットとなっており、16ビットは16384階調分のデータ量を持っている。そこで、1階調を0.1℃に設定すると、16384階調×0.1℃で1638.4℃分のデータが得られる。図2は、赤外線カメラ1による赤外線熱画像の一例を示す図で、フレーム毎の変化を示している。
【0012】
測距演算装置2は、赤外線カメラ1で得られた赤外線熱画像のデジタル情報を処理して、自らと目標物3との間の距離を演算する。測距演算装置2は、いずれも図示しない演算処理部(CPU)、主メモリ(RAM)、読出し専用メモリ(ROM)、入力部、出力部、ハードディスク装置等の外部記憶装置を具備している。
【0013】
ROM、若しくは外部記憶装置などに、測距方法を実行させるためのプログラムが記憶されており、このプログラムを主メモリ上に載せ、CPUがこれを実行することにより測距方法が実行される。
【0014】
本実施形態に係る測距方法では、このような赤外線熱画像のデジタル情報を利用して測距するものである。
【0015】
(目標候補の抽出)
まず、赤外線熱画像全体について、1画素づつの輝度をデジタル値で得る。得られた全画素について輝度値の平均値と、標準偏差を算出する。これら平均値と、標準偏差の算出を1フレームについて行う。
【0016】
次に、目標の候補を周囲と区別して抜き出す作業を行う。目標候補は、周囲に比べて、高温でしかも高熱を発している。
【0017】
得られた全画素についての輝度値の分布がガウス分布とすると、ガウス分布の片側には、周囲の輝度値から際立った輝度値の箇所が分布される。
【0018】
そこで、例えば、事前に設定する定数に標準偏差を掛け合わせた数値と平均値の和を閾値とする。ここで、「事前に設定する定数」とは、目標候補を抽出するための閾値を設定するための係数であって、例えば、標準偏差を何倍するかの係数である。
【0019】
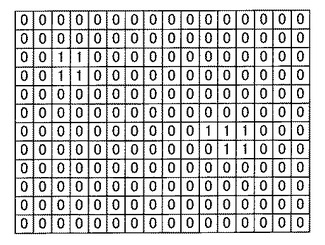
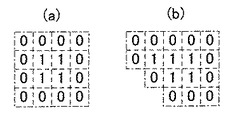
次に、閾値以上の輝度値を“1”、閾値未満の輝度値を“0”とすることにより、1フレームの画像を2値化する。図3は、2値化した1フレーム画像の一例を示す図である。
【0020】
(ウインドウの設定)
2値化した画像で、隣接する画素が“1”である場合を1群として、その1群を覆うようなウインドウを設定する。例えば、ウインドウの設定の仕方は、2値化画像中の1群を含み1群の周囲に1画素づつ大きな領域にウインドウを設定する。このように2値化した1群よりも大きめにウインドウを設定するのは、目標候補は動いているので、次の瞬間に、目標候補が隣の画素に移っても支障のないように、その動きに追従できるようにするためである。図4は、ウインドウの一例を示す図である。
【0021】
(目標の抽出)
次に、設定された各ウインドウについて、輝度値を積算する。各ウインドウは2値化されている(各画素とも1又は0)ので、上述したデジタル値としての輝度値に“1”又は“0”を掛けたものを積算していく。積算することにより、目標候補が放つ熱量相当の輝度が求められる。
【0022】
次に、積算した結果がフレーム毎に変化しているウインドウを選択する。自らに接近して来る「目標」は、放つ熱量が増加する傾向にある。
【0023】
そこで、選択したウインドウのうち、輝度の積算値がフレーム毎に増加しているウインドウ中に「目標」が含まれていることとなる。このようにして、「目標」が抽出される。
【0024】
(相対距離の算出)
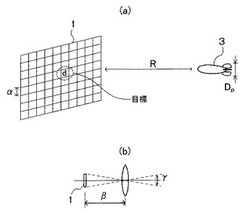
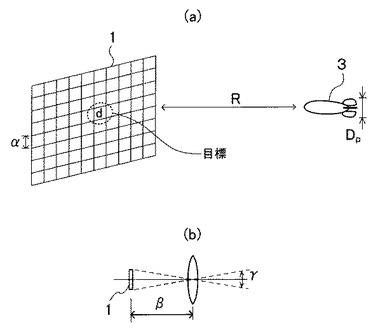
次に、相対距離の算出について説明する。相対距離の算出は、抽出した「目標」のサイズ(画素数)のフレーム毎の変化と予め設定する実際の目標のサイズから、相対距離を算出する。図5は、相対距離の算出を説明するための図である。
【0025】
まず、赤外線カメラ1による表示画像を構成する1画素のサイズをαとし、赤外線カメラ1に内蔵される光学系の焦点距離をβとすると、赤外線カメラ1による検知性能を示すもので、ある距離離れた最小寸法の検知物を視野角で表わす瞬時視野γ(ラジアン)は、次式(1)で与えられる。
【0026】
γ=α/β ・・・(1)
抽出した目標サイズ(画素数):d、相対距離:R、実目標サイズ:Dpとすると、次式(2)が成り立つ。
d×γ×R=Dp ・・・(2)
これを変形すると、
R=Dp/d・γ=β・Dp/d・α ・・・(3)
となり、相対距離Rが求まる。
ここで、実目標サイズDpは、事前に設定するものである。
【0027】
一般的に、飛翔体のプルーム(煙流)は1〜2mであり、遠方からは略円く見える。例えば赤外線カメラ1から1km離れている場合、直径1mのプルームは3画素に見え、直径2mのプルームは5画素に見えることを利用する。例えば、5画素に見える場合、実目標サイズDpは2mとなる。
【0028】
(相対速度、相対加速度の算出)
上記式で求められる相対距離のフレーム毎の変化から、相対速度および相対加速度を算出することができる。
【0029】
(到達時間の算出)
さらに、得られた相対速度及び相対加速度を使用して、移動物体の自らに到達する時間を算出することができる。
【0030】
以上説明したように、本実施形態によれば、赤外線カメラ1の赤外線熱画像から自らに向かって飛翔してくる移動物体の目標を抽出し、その移動物体の到達時間を予測することができる。
【0031】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0032】
10・・・測距装置
1・・・赤外線カメラ
2・・・測距演算装置
3・・・目標物
【技術分野】
【0001】
本発明の実施形態は、赤外線カメラによる測距方法及び到達時間算出方法に関する。
【背景技術】
【0002】
一般に、対象物までの測距を行う測距方式として、対象物を撮像して得られた画像データを処理して、対象物までの距離を測定するものがある。例えば、対象物が移動している場合、画像処理と演算の周期毎の信号処理時間を短縮することが提案されている(例えば、特許文献1参照。)。
【0003】
対象物にレーザ光を照射し、対象物からの反射光を受光し、時間差から測距する測距装置は、装置規模や消費電力が大きくなっていた。そのため、測距装置を飛行体等に搭載するのは容易でない場合がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開平4−203922号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
本発明が解決しようとする課題は、赤外線カメラの画像から自らに向かって飛翔してくる移動物体の目標を抽出し、その移動物体の到達時間を算出する測距方法及び到達時間算出方法を提供することにある。
【課題を解決するための手段】
【0006】
実施形態の測距方法は、赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、前記赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、前記閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの前記赤外線熱画像を2値化し、前記2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、前記目標の候補を抽出し、前記設定された各ウインドウ内に含まれる画素について輝度値を積算し、前記目標候補が放つ熱量相当の輝度を算出し、前記輝度の積算値がフレーム毎に増加している前記ウインドウを選択して、前記目標を抽出し、前記目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する。
【図面の簡単な説明】
【0007】
【図1】本実施形態に係る測距方法に使用する測距装置の構成を示す図である。
【図2】赤外線カメラ1による赤外線熱画像の一例を示す図である。
【図3】2値化した1フレーム画像の一例を示す図である。
【図4】ウインドウの一例を示す図である。
【図5】相対距離の算出を説明するための図である。
【発明を実施するための形態】
【0008】
以下、本発明の一実施の形態について、図面を参照して説明する。尚、各図において同一箇所については同一の符号を付すとともに、重複した説明は省略する。
【0009】
図1は、本実施形態に係る測距方法に使用する測距装置の構成を示す図である。本実施形態に係る測距方法に使用する測距装置10は、目標物3から出ている赤外線放射エネルギーを検出する赤外線カメラ1と、測距演算装置2から構成することができる。
【0010】
赤外線カメラ1は、目標物3から放射されている赤外線を検出し、得られた赤外線放射エネルギー量を温度に換算し、赤外線熱画像を表示する。
【0011】
赤外線カメラ1による温度分布の表示画像は、画素数(検出素子数:例えば垂直方向240画素×水平方向320画素)に対応したマトリックスで構成されている。例えば、1画素のデータ量(データ深さ)は16ビットとなっており、16ビットは16384階調分のデータ量を持っている。そこで、1階調を0.1℃に設定すると、16384階調×0.1℃で1638.4℃分のデータが得られる。図2は、赤外線カメラ1による赤外線熱画像の一例を示す図で、フレーム毎の変化を示している。
【0012】
測距演算装置2は、赤外線カメラ1で得られた赤外線熱画像のデジタル情報を処理して、自らと目標物3との間の距離を演算する。測距演算装置2は、いずれも図示しない演算処理部(CPU)、主メモリ(RAM)、読出し専用メモリ(ROM)、入力部、出力部、ハードディスク装置等の外部記憶装置を具備している。
【0013】
ROM、若しくは外部記憶装置などに、測距方法を実行させるためのプログラムが記憶されており、このプログラムを主メモリ上に載せ、CPUがこれを実行することにより測距方法が実行される。
【0014】
本実施形態に係る測距方法では、このような赤外線熱画像のデジタル情報を利用して測距するものである。
【0015】
(目標候補の抽出)
まず、赤外線熱画像全体について、1画素づつの輝度をデジタル値で得る。得られた全画素について輝度値の平均値と、標準偏差を算出する。これら平均値と、標準偏差の算出を1フレームについて行う。
【0016】
次に、目標の候補を周囲と区別して抜き出す作業を行う。目標候補は、周囲に比べて、高温でしかも高熱を発している。
【0017】
得られた全画素についての輝度値の分布がガウス分布とすると、ガウス分布の片側には、周囲の輝度値から際立った輝度値の箇所が分布される。
【0018】
そこで、例えば、事前に設定する定数に標準偏差を掛け合わせた数値と平均値の和を閾値とする。ここで、「事前に設定する定数」とは、目標候補を抽出するための閾値を設定するための係数であって、例えば、標準偏差を何倍するかの係数である。
【0019】
次に、閾値以上の輝度値を“1”、閾値未満の輝度値を“0”とすることにより、1フレームの画像を2値化する。図3は、2値化した1フレーム画像の一例を示す図である。
【0020】
(ウインドウの設定)
2値化した画像で、隣接する画素が“1”である場合を1群として、その1群を覆うようなウインドウを設定する。例えば、ウインドウの設定の仕方は、2値化画像中の1群を含み1群の周囲に1画素づつ大きな領域にウインドウを設定する。このように2値化した1群よりも大きめにウインドウを設定するのは、目標候補は動いているので、次の瞬間に、目標候補が隣の画素に移っても支障のないように、その動きに追従できるようにするためである。図4は、ウインドウの一例を示す図である。
【0021】
(目標の抽出)
次に、設定された各ウインドウについて、輝度値を積算する。各ウインドウは2値化されている(各画素とも1又は0)ので、上述したデジタル値としての輝度値に“1”又は“0”を掛けたものを積算していく。積算することにより、目標候補が放つ熱量相当の輝度が求められる。
【0022】
次に、積算した結果がフレーム毎に変化しているウインドウを選択する。自らに接近して来る「目標」は、放つ熱量が増加する傾向にある。
【0023】
そこで、選択したウインドウのうち、輝度の積算値がフレーム毎に増加しているウインドウ中に「目標」が含まれていることとなる。このようにして、「目標」が抽出される。
【0024】
(相対距離の算出)
次に、相対距離の算出について説明する。相対距離の算出は、抽出した「目標」のサイズ(画素数)のフレーム毎の変化と予め設定する実際の目標のサイズから、相対距離を算出する。図5は、相対距離の算出を説明するための図である。
【0025】
まず、赤外線カメラ1による表示画像を構成する1画素のサイズをαとし、赤外線カメラ1に内蔵される光学系の焦点距離をβとすると、赤外線カメラ1による検知性能を示すもので、ある距離離れた最小寸法の検知物を視野角で表わす瞬時視野γ(ラジアン)は、次式(1)で与えられる。
【0026】
γ=α/β ・・・(1)
抽出した目標サイズ(画素数):d、相対距離:R、実目標サイズ:Dpとすると、次式(2)が成り立つ。
d×γ×R=Dp ・・・(2)
これを変形すると、
R=Dp/d・γ=β・Dp/d・α ・・・(3)
となり、相対距離Rが求まる。
ここで、実目標サイズDpは、事前に設定するものである。
【0027】
一般的に、飛翔体のプルーム(煙流)は1〜2mであり、遠方からは略円く見える。例えば赤外線カメラ1から1km離れている場合、直径1mのプルームは3画素に見え、直径2mのプルームは5画素に見えることを利用する。例えば、5画素に見える場合、実目標サイズDpは2mとなる。
【0028】
(相対速度、相対加速度の算出)
上記式で求められる相対距離のフレーム毎の変化から、相対速度および相対加速度を算出することができる。
【0029】
(到達時間の算出)
さらに、得られた相対速度及び相対加速度を使用して、移動物体の自らに到達する時間を算出することができる。
【0030】
以上説明したように、本実施形態によれば、赤外線カメラ1の赤外線熱画像から自らに向かって飛翔してくる移動物体の目標を抽出し、その移動物体の到達時間を予測することができる。
【0031】
本発明のいくつかの実施形態を説明したが、これらの実施形態は、例として提示したものであり、発明の範囲を限定することは意図していない。これら新規な実施形態は、その他の様々な形態で実施されることが可能であり、発明の要旨を逸脱しない範囲で、種々の省略、置き換え、変更を行うことができる。これら実施形態やその変形は、発明の範囲や要旨に含まれるとともに、特許請求の範囲に記載された発明とその均等の範囲に含まれる。
【符号の説明】
【0032】
10・・・測距装置
1・・・赤外線カメラ
2・・・測距演算装置
3・・・目標物
【特許請求の範囲】
【請求項1】
赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、
前記赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、
前記閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの前記赤外線熱画像を2値化し、
前記2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、前記目標の候補を抽出し、
前記設定された各ウインドウ内に含まれる画素について輝度値を積算し、前記目標候補が放つ熱量相当の輝度を算出し、
前記輝度の積算値がフレーム毎に増加している前記ウインドウを選択して、前記目標を抽出し、
前記目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する測距方法。
【請求項2】
前記閾値の設定は、
赤外線熱画像の全画素について輝度値の平均値と、標準偏差を算出し、
標準偏差に所定の定数を掛け合わせた数値と平均値の和を閾値とする請求項1に記載の測距方法。
【請求項3】
前記所定の定数は、標準偏差に掛け合わせる係数である請求項2に記載の測距方法。
【請求項4】
前記ウインドウの設定は、2値化画像に対して、周囲1画素づつ大きな領域に設定する請求項1乃至請求項3のいずれか1項に記載の測距方法。
【請求項5】
前記赤外線カメラの画素サイズと焦点距離によって1画素の視野角である瞬間視野を算出し、前記抽出した目標のなす角度を算出し、実目標サイズで割り戻すことにより前記相対距離を算出する請求項1に記載の測距方法。
【請求項6】
前記赤外線カメラの瞬時視野γ、抽出した目標のサイズ(画素数)d、実目標サイズDpであるとき、前記相対距離Rは、次式で算出する請求項1に記載の測距方法。
R=Dp/d・γ
【請求項7】
請求項1記載の測距方法で算出した前記相対距離のフレーム毎の変化から、相対速度及び相対加速度を算出し、相対速度及び相対加速度から、前記目標が到達する時間を算出する到達時間算出方法。
【請求項1】
赤外線カメラで、目標を含む移動物体の赤外線像を光学的に走査して赤外線熱画像を取得し、
前記赤外線熱画像の全画素についての輝度値の分布を区画するために所定の閾値を設定し、
前記閾値以上の輝度値を1、閾値未満の輝度値を0として、1フレームの前記赤外線熱画像を2値化し、
前記2値化画像中で、隣接する画素が1であるものの集まりを1群とし、該1群を覆うようなウインドウを設定して、前記目標の候補を抽出し、
前記設定された各ウインドウ内に含まれる画素について輝度値を積算し、前記目標候補が放つ熱量相当の輝度を算出し、
前記輝度の積算値がフレーム毎に増加している前記ウインドウを選択して、前記目標を抽出し、
前記目標の画素数のフレーム毎の変化と、予め設定する実際の目標サイズである実目標サイズから、相対距離を算出する測距方法。
【請求項2】
前記閾値の設定は、
赤外線熱画像の全画素について輝度値の平均値と、標準偏差を算出し、
標準偏差に所定の定数を掛け合わせた数値と平均値の和を閾値とする請求項1に記載の測距方法。
【請求項3】
前記所定の定数は、標準偏差に掛け合わせる係数である請求項2に記載の測距方法。
【請求項4】
前記ウインドウの設定は、2値化画像に対して、周囲1画素づつ大きな領域に設定する請求項1乃至請求項3のいずれか1項に記載の測距方法。
【請求項5】
前記赤外線カメラの画素サイズと焦点距離によって1画素の視野角である瞬間視野を算出し、前記抽出した目標のなす角度を算出し、実目標サイズで割り戻すことにより前記相対距離を算出する請求項1に記載の測距方法。
【請求項6】
前記赤外線カメラの瞬時視野γ、抽出した目標のサイズ(画素数)d、実目標サイズDpであるとき、前記相対距離Rは、次式で算出する請求項1に記載の測距方法。
R=Dp/d・γ
【請求項7】
請求項1記載の測距方法で算出した前記相対距離のフレーム毎の変化から、相対速度及び相対加速度を算出し、相対速度及び相対加速度から、前記目標が到達する時間を算出する到達時間算出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−251924(P2012−251924A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−126117(P2011−126117)
【出願日】平成23年6月6日(2011.6.6)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月6日(2011.6.6)
【出願人】(000003078)株式会社東芝 (54,554)
【Fターム(参考)】
[ Back to top ]