
測距装置
【課題】ステレオカメラの撮像画像の視差から対象物までの距離分布を求め、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し安全性を向上する。
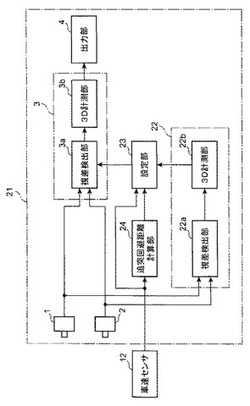
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
【解決手段】測距装置21は、低速高精度な第1の距離分布演算部3と、高速低精度な第2の距離分布演算部22と、追突回避距離計算部24とを備え、車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において車速に対応した追突回避距離が求められ、設定部23は、第2の距離分布演算部22の3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載され、いわゆるステレオカメラの撮像画像などから測距を行う装置に関する。
【背景技術】
【0002】
車両の安全性を高める取り組みとして、前方の障害物を検出して危険を警告したり、先行車との距離を測って車間距離を一定に保つ装置がある。そのような従来技術として、特許文献1が提案されている。その従来技術によれば、ステレオカメラで撮影した画像が画像処理部で処理されて画像全体の3次元距離分布が演算され、その距離分布情報から道路形状や立体物の3次元位置が高速で検出されるとともに、衝突判断部で各種センサの出力から撮影画像内における自車の走行領域が求められ、その走行領域に掛かる総ての車両や障害物について衝突危険度が算出され、高い場合はユーザに報知するようになっている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−283593号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の従来技術では、衝突判断部が、撮影画像内における自車の走行領域を推定し、その推定した領域内で車両や障害物の探索を行っている。しかしながら、前記衝突判断部が、前記警告などに使用しない前記走行領域以外の領域においても、前記3次元距離分布を算出しているので、計算時間が掛かってしまう。このため、前記警告などを発するまでにタイムラグが発生し、安全性が低下してしまう。また、上述の従来技術は、ステレオ法によって前記3次元距離分布を算出しているので、高速ではあるが低精度である。このため、得られた距離データの信頼性が低く、これによってもまた、安全性が低下してしまう。
【0005】
本発明の目的は、距離分布演算の計算時間を短縮することができる測距装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の一態様の測距装置は、車両に搭載され、複数の撮像部による撮像画像の視差から、第1の距離分布演算部が先行車までの距離分布を求めるにあたって、速度検出部が前記車両の速度を検出し、その速度情報から、追突回避距離算出部が先行車への追突を回避可能な追突回避距離を算出する一方、第2の距離分布演算部が、撮像画像全域を処理領域とし、前記第1の距離分布演算部に比べて、高速低精度な距離分布演算を行っており、設置部が、前記第2の距離分布演算部による距離分布の演算結果において、前記追突回避距離算出部で求められた追突回避距離に該当する距離の領域を、前記第1の距離分布演算部における処理領域に設定する。
【発明の効果】
【0007】
このように構成することで、現在の速度から、運転者などが衝突回避に必要な範囲(確実に止まれる距離範囲)だけ距離分布の演算を行うことになり、距離分布演算の計算時間を短縮し、安全性を向上することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の第1の形態に係る測距装置の電気的構成を示すブロック図である。
【図2】ステレオ法による測距方法を説明するための図である。
【図3】前記測距装置における視差検出部の一構成例を示すブロック図である。
【図4】図3で示す視差検出部で得られるPOC値の例を示すグラフである。
【図5】本発明の実施の第1の形態に係る設定部による距離分布演算の処理領域の設定動作を説明するための図である。
【図6】ステレオカメラの距離による視野の変化を説明するための図である。
【図7】本発明の実施の第1の形態に係る設定部による距離分布演算の処理領域の変化を説明するための図であり、低速域の場合を示す。
【図8】本発明の実施の第1の形態に係る設定部による距離分布演算の処理領域の変化を説明するための図であり、中速域の場合を示す。
【図9】本発明の実施の第1の形態に係る設定部による距離分布演算の処理領域の変化を説明するための図であり、高速域の場合を示す。
【図10】図8の処理領域で距離分布を求めた結果の一例を示す図である。
【図11】本発明の実施の第2の形態に係る測距装置の電気的構成を示すブロック図である。
【図12】図11で示す視差検出部で行われる対応点探索手法であるSAD法を説明するための図である。
【図13】図11で示す測距装置の動作を説明するための図である。
【図14】図11で示す測距装置の動作を説明するための図である。
【図15】図11で示す測距装置の動作を説明するための図である。
【図16】図11で示す測距装置の動作を説明するための図である。
【図17】本発明の実施の第3の形態に係る測距装置の電気的構成を示すブロック図である。
【図18】本発明の実施の第4の形態に係る測距装置の電気的構成を示すブロック図である。
【図19】本発明の実施の第4の形態に係る設定部による距離分布演算の処理領域の設定動作を説明するための図である。
【図20】本発明の実施の第5の形態に係る設定部による距離分布演算の処理領域の設定動作を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本発明に係る実施の一形態を図面に基づいて説明する。なお、各図において同一の符号を付した構成は、同一の構成であることを示し、その説明を省略する。
<実施例1>
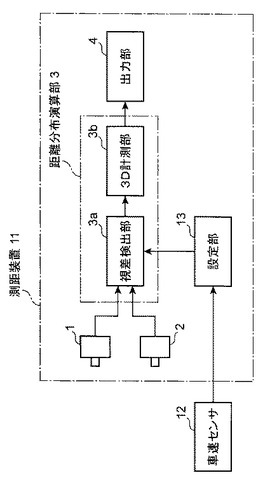
図1は、本発明の実施の第1の形態に係る測距装置11の電気的構成を示すブロック図である。この測距装置11は、大略的に、車両に搭載され、複数の撮像部であるステレオカメラ1,2を使用して、それらの撮像画像の視差から、第1の距離分布演算部3が距離分布を計測し、出力部4から運転者に、対象物である先行車までの距離情報を通知するシステムである。前記出力部4には、オーディオからの音声出力、カーナビ画面への出力および表示装置への出力などが用いられ得る。前記第1の距離分布演算部3は、前記視差を求める視差検出部3aと、その求められた視差から対象物の3次元位置を計測する3D計測部3bとを備えて構成される。
【0010】
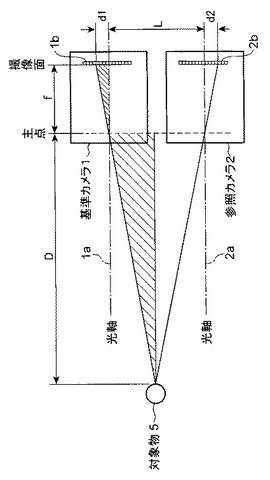
図2は、ステレオ法による測距方法を説明するための図である。前記視差検出部3aは、ステレオカメラ1,2による2つの撮像画像に対して、後述するようにして対応点探索を行い、同じ対象物5に対する位置ずれ量(=視差d)を求める。前記3D計測部3bは、求められた位置ずれ量(=視差d)から、前記ステレオ法によって対象物5までの距離を求める。図2は、少なくとも焦点距離(f)、撮像面(CCD)の画素数、1画素の大きさ(μ)が相互に等しい2台の前記ステレオカメラ1,2を用い、所定の基線長(L)だけ左右に離間させて光軸1a,2aを平行に配置して対象物5を撮影した状態を示している。この状態で、撮像面1b,2b上の視差(ずれ画素数)がd(=d1+d2)であると、対象物5までの距離(D)は、斜線を施して示す三角形が相似であることから、
D:f=L:μ×d
の関係があり、
D=(L×f)/(μ×d)
で求めることができる。
【0011】
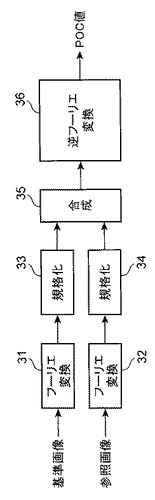
図3は、前記視差検出部3aの一構成例を示すブロック図である。この視差検出部3aは、前記対応点探索手法として、位相限定相関法(POC法)を用いている。そして、この視差検出部3aは、変換にフーリエ変換を用い、フーリエ級数の振幅成分を抑制した位相成分のみの相関演算を行うようにした場合の処理の流れを示すものである。前記ステレオカメラ1,2による基準画像および参照画像は、フーリエ変換部31,32においてそれぞれフーリエ変換され、規格化部33,34において規格化された後、合成部35において合成され、逆フーリエ変換部36において逆フーリエ変換される。図3を数式で表すと以下のとおりである。
【0012】
【数1】

【0013】
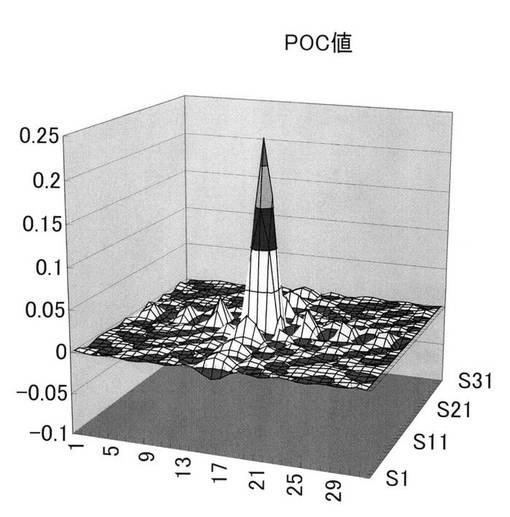
上記POC処理で得られるPOC値は、図4に示すように、画像間(基準ウインドウと参照ウインドウ)の移動量の座標に急峻な類似度ピークを持つことが知られており、画像マッチングにおけるロバスト性が高い。そのPOCのピークの高さが、パターン類似度を示す。前記位置ズレ量(=視差d−sub)は、視差検出部3aが、POCのピーク位置を推定することで求められる。POC値は離散的に求まるので、ピーク位置をサブピクセルで補間推定することによって、前記視差検出部3aは、高分解な対応点座標を求めることができる。ピーク位置の補間推定方法としては、放物線などの関数を、フィッティングして行うことができる。そして、候補領域間の前記位置ズレ量dは、候補領域間のピクセルレベルの位置ズレ量d−pixelに、POC法で求めたサブピクセルの位置ズレ量d−subを加えた量となる。
【0014】
このように視差検出部3aは、前記撮像画像上に定めたウインドウ内のパターンを周波数分解し、振幅成分を抑制した位相成分のみの信号の類似度に基づいて対応点探索を行うことで、左右のカメラ1,2の撮影条件の差や、ノイズなどの影響を受け難く、ロバストな対応点探索を行うことができる。なお、前記ウインドウ内のパターンを周波数分解する手法には、DFT(離散フーリエ変換)を用いているけれども、FFT(高速フーリエ変換)、DCT(離散コサイン変換)、DST(離散サイン変換)、ウエーブレット変換、アダマール変換などの他の手法が用いられてもよい。前記DFTに加えて、これらの周波数分解手法は、一般的に広く用いられ、性質が安定した手法で好適である。
【0015】
また、前記POC法(位相限定相関法)では、逆フーリエ変換後に得られるPOC値は、画像間(基準ウインドウと参照ウインドウ)の移動量の座標に急峻な相関ピークを持つことが知られており、前記視差検出部3aは、対応点探索処理にこのPOC法を用いることで、画像マッチングにおけるロバスト性と移動量推定精度とが高くなり、好適である。
【0016】
上述のように構成される測距装置11において、注目すべきは、本実施の形態では、速度検出部である前記搭載車両の車速センサ12からの速度情報を取得し、その速度情報に対応して、前記第1の距離分布演算部3に、撮像画像における距離分布演算の処理領域を設定する設定部13が設けられることである。具体的には、前記設定部13は、視差検出部3aにおいて、前記視差dが求められる範囲を、速度が遅くなる程拡げ、速くなる程狭め、重要な領域のみ距離分布を算出するようにする。前記車速センサ12には、車輪回転数を基に速度を計測する装置、GPSの現在地情報を基に速度を計測する装置または加速度センサからの加速度情報を積分して速度を計測する装置などを用いることができる。
【0017】
図5は、そのような設定部13による視差dの検出範囲の設定動作を説明するための図である。この図5は、前記ステレオカメラ1,2の撮像画像の一例を示すものであり、車両から遠い位置に存在する路面は画像中の上部に映り、近い位置に存在する路面は画像中の下部に映る。またこのような状況下では、横一列のラインは路面上の同じ距離に相当する可能性が高いので、設定部13は、画像中の等距離の部分を簡単に抜き出すことができる。よって本実施の形態では、設定部13は、前記速度情報に対応した上下のラインLu,Lbで規定した横一列のライン群を、現在の速度から注視すべき前記処理領域として抽出する。こうして、設定部13は、処理領域を容易に設定することができる。
【0018】
ここで、日本交通心理学会で推奨されている危険回避に最低限必要な車間距離として、「車間距離2秒以上」がある。この危険回避に最低限必要な車間距離を安全距離(運転者が注意すべき距離を追突回避距離)とする。したがって、前記安全距離を求める計算式は、速度(km/h)をSとすると、下式で表すことができる。
【0019】
安全距離(m)=2×S×(1000/3600)
たとえば、時速60km/hで走行している場合は、安全距離は33.3mとなり、33.3m以上の車間距離が危険回避に必要な距離となる。このような安全距離(追突回避距離)が、各車速について予め計算され、後述するようにして、その安全距離の範囲が撮像画面上のどのラインからどのラインに該当するかのテーブルが求められ、このテーブルが前記設定部13に、車速−処理領域のテーブルとして予め格納されている。そして、車速が変化すると、設定部13は、前記テーブルを参照して、処理領域を規定する上下ラインLu,Lbを前記視差検出部3aに設定する。
【0020】
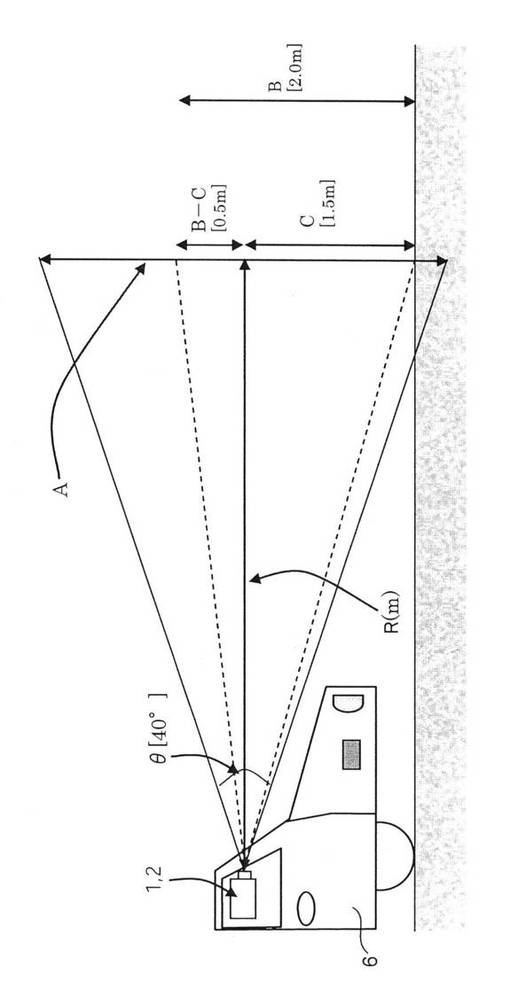
ここで、図6で示すように、ステレオカメラ1,2の鉛直方向の画角θおよび測距の対象物5までの距離にもよるが、該ステレオカメラ1,2の取付け高さC(これを画面中心に設定する)よりも低い位置(路面まで)は、該ステレオカメラ1,2が殆どカバーできる(捉えることができる)が、高い位置は、該ステレオカメラ1,2がどの程度までカバーするのかは、比較的任意に定められる。そこで、本実施の形態では、該ステレオカメラ1,2は、日本の道路運送車両法による自動車の分類において、四輪以上で小型と分類されている高さ2m以下をカバーするものとする(大きい車両も、前記2m以下の高さの部分で検知できる)。
【0021】
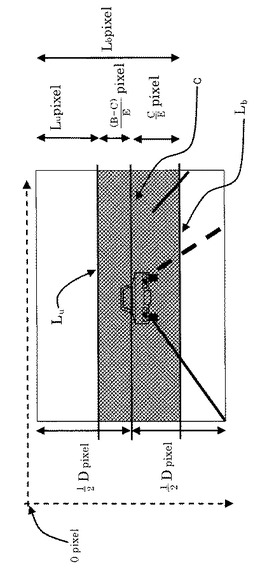
そして、図5で示すように、追突回避距離Rにおける高さ2mが、前記ステレオカメラ1,2の何画素に当るかが、前記上ラインLuとして設定部13のテーブルに格納される。また同様に、前記追突回避距離における路面が、前記ステレオカメラ1,2の何画素に当るかが、前記下ラインLbとして設定部13のテーブルに格納される。ここで、図5において、参照符号Dはステレオカメラ1,2の高さ方向の全画素数であり、参照符号Eはステレオカメラ1,2の1画素当りが受け持つ鉛直方向の高さであり、前記上下ラインLu,Lbは画素数(画素No.、以下pixelで示す)として格納される。
【0022】
以下に、前記上下ラインLu,Lb(画素数)の求め方を説明する。ステレオカメラ1,2が車両6に水平に取付けられており、前記追突回避距離R(m)だけ離れた位置での撮像画像が示す鉛直方向の長さをA(m)とすると、この高さAは下式で求めることができる。
【0023】
A=R×tan(θ/2)×2
したがって、前記追突回避距離Rの位置において、ステレオカメラ1,2の1画素当りが受け持つ前記鉛直方向の高さE(m/pixel)は、前記全画素数をDとすると、下式で求めることができる。
【0024】
E=A/D
そして、図5に示すように画像原点(0pixel)を左上とした場合、中心ラインCから画像上方向に世界座標系で、B−C(=0.5m)進めた位置(ステレオカメラ1,2から追突回避距離Rだけ離れた位置における小型車の高さ限界)に相当する画像上の位置である前記上ラインLu(pixel)は、下式で求めることができる。
【0025】
Lu=(D/2)−((B−C)/E) (ただし、0≦Lu<D/2)
また、図5の中心ラインCから画像下方向に世界座標系でC(=1.5m)進めた位置(ステレオカメラ1,2から追突回避距離Rだけ離れた位置における路面の高さ)に相当する画像上の位置である前記下ラインLb(pixel)は、下式で求めることができる。
【0026】
Lb=(D/2)+(C/E) (ただし、D/2<Lb≦B)
具体的には、前記ステレオカメラ1,2の鉛直方向の画角θを40°、鉛直方向の画素数を480pixel、追突回避距離Rを安全距離とした場合、該測距装置11が搭載された車両が時速7km/h(低速と中速の閾値)で走行していた場合、Lu=46pixel,Lb=480pixelとなる。これに対して、前記車両が時速60km/h(中速と高速の閾値)で走行していた場合、Lu=230pixel,Lb=270pixelとなる。以下、低速は、該測距装置11が搭載される車両(自動車)6のクリープ現象での最高速度である前記7km/h未満、高速は高速道路を走行する際の最低速度である60km/h以上、中速はそれらの間の7km/h以上、60km/h未満とするが、他の値でも構わない。
【0027】
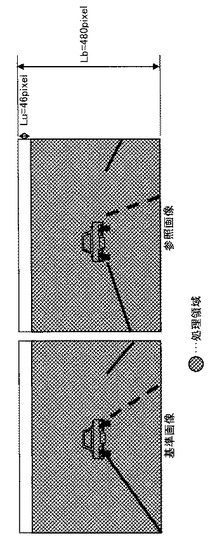
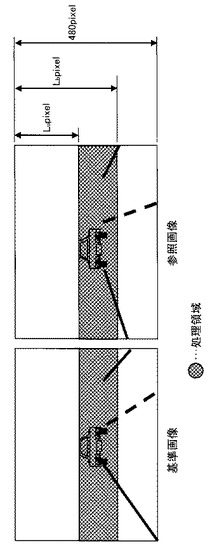
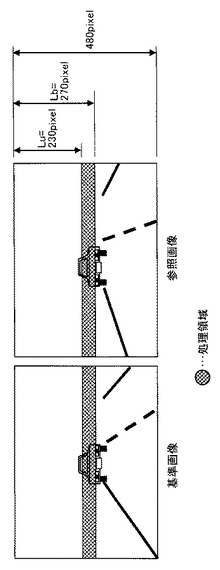
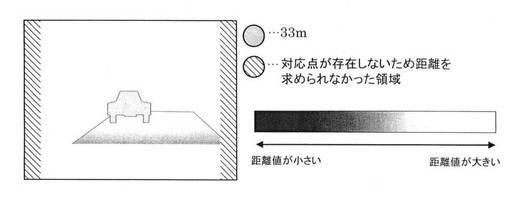
図7〜図9には、ステレオカメラ1,2から追突回避距離Rだけ離れた地点で、処理領域となる上述のようにして求められた路面から高さ2mまでの範囲の違いが示されている。前記処理領域は、網掛けして示しており、図7は前記低速域のLu=46pixel,Lb=480pixelの場合を示す。図8は中速域であり、図9は高速域のLu=230pixel,Lb=270pixelの場合を示している。設定部13は、車速に対応して前記テーブルから読出したこれらの上下ラインLu,Lbの値を視差検出部3aに設定し、視差検出部3aは、それらの上下ラインLu,Lb間の処理領域のみ対応点探索を行い、視差dを求める。図8のような処理領域で距離分布が求められると、図10で示すようになる。
【0028】
このように設定部13が車速に応じて対応点探索、したがって距離分布演算の処理領域を設定することで、距離分布演算部3は、現在の速度から、運転者などが衝突回避に必要な範囲(確実に止まれる距離範囲)だけ距離分布の演算を行うことになり、距離分布演算の計算時間を短縮し、安全性を向上することができる。
【0029】
<実施例2>
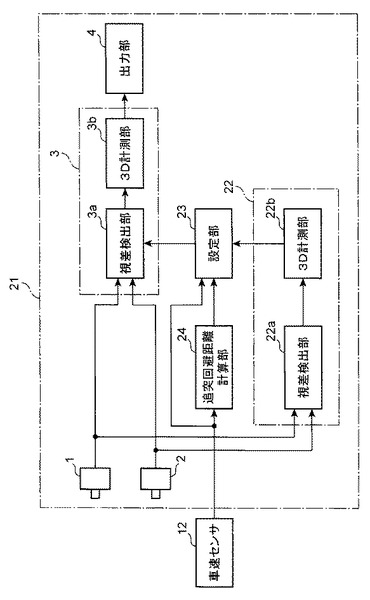
図11は、本発明の実施の第2の形態に係る測距装置21の電気的構成を示すブロック図である。この測距装置21は、前述の測距装置11に類似し、対応する部分には同一の参照符号を付して示し、その説明を省略する。注目すべきは、この測距装置21は、撮像画像全域を前記処理領域とし、前記第1の距離分布演算部3に比べて、高速低精度な第2の距離分布演算部22をさらに備え、設定部23は、前記車速センサ12の検出結果に加えて、前記第2の距離分布演算部22による距離分布の演算結果から、前記第1の距離分布演算部3に、前記撮像画像における距離分布演算の処理領域を設定することである。
【0030】
具体的には、前記第2の距離分布演算部22は、前記ステレオカメラ1,2から入力された撮像画像から、SAD法によって高速に対応点探索を行い、視差を求める視差検出部22aと、求められた視差からステレオ法で対象物5までの距離を求める3D計測部22bとを備えて構成される。3D計測部22bで求められた距離分布は設定部23に入力される。一方、前記車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において前述のように車速に対応した追突回避距離Rが求められ、前記設定部23に入力される。設定部23は、上述のようにして車速から予め求められている処理領域に、この3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に加える。
【0031】
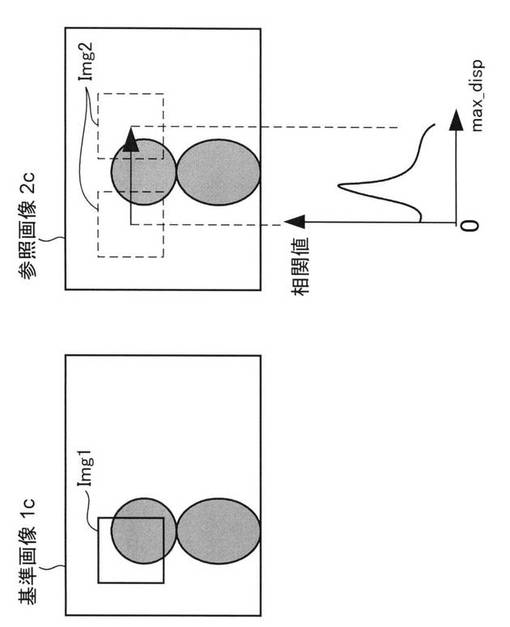
図12は、前記視差検出部22aで行われる対応点探索手法である前記SAD法を説明するための図である。このSAD法では、前記視差検出部22aは、基準画像1c上の画像Img1が参照画像2c上のどこにあるのかを探索する。具体的には、前記視差検出部22aは、前記基準画像1c上で、縦横方向にそれぞれW画素分の大きさを持つウインドウ(前記画像Img1)を設定し、同様に、参照画像2c上にも同じ大きさを持つウインドウ(前記画像Img2)を設定する。そして、前記視差検出部22aは、参照画像2c上において、基準画像1c上におけるウインドウImg1と同じ位置から、基線長方向に或る範囲(0<p<max_disp)でウインドウImg2の走査を開始させて、それぞれの位置で相関演算を行う。その相関演算には、前記視差検出部22aは、先ず、下式で示すように、ウインドウの同じ対応画素の明るさの差の絶対値をそれぞれ求める。
【0032】
【数2】
【0033】
次に、前記視差検出部22aは、それをウインドウ内の全画素に亘って加算した値SADpから、下式によって相関値(COR)を求める。
【0034】
【数3】
【0035】
前記視差検出部22aは、このような作業を1画素ずつずらして行ってゆき、最も相関値の高いウインドウ位置に画像Img1と等しい画像があると判定し、そのずらした画素数を前記視差dとする。なお、この説明では、前記視差検出部22aはピクセル単位で最も相関値の高い位置から視差dを求めているが、ピーク前後の相関値を用いて、サブピクセル単位でピークを補間して求めてもよい。
【0036】
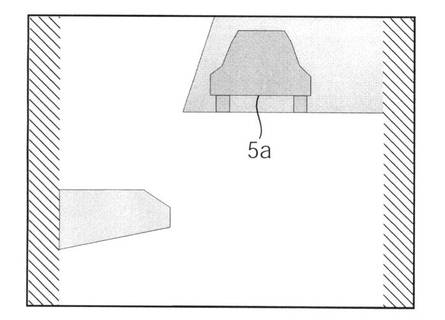
図13〜図16は、この測距装置21の動作を説明するための図である。ステレオカメラ1,2の撮像画像が図13で示すような場合、前記第1の距離分布演算部3が上述のように単に速度に対応した上下ラインLu,Lbで規定した処理領域について距離分布を求めると、図14で示すようになる。これらの図13〜図16の例は、中速で上り坂にさしかかる箇所を走行している例を示しており、対象物5である先行車5a,5bが存在し、先行車5aは前記追突回避距離Rである20m付近に存在するものの、上り坂の関係で、撮像画面上に映る位置が速度に相当した位置よりも上になっており、これに対して先行車5bは、同じ高さの路面の遠くを走行している。
【0037】
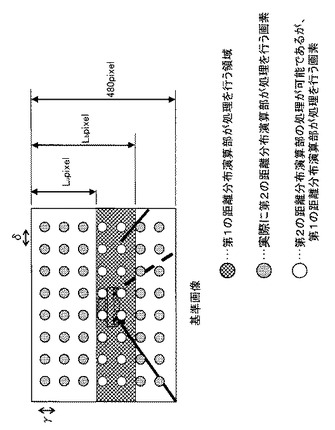
したがって、前記第1の距離分布演算部3が単に速度に対応した上下ラインLu,Lbで規定した処理領域について距離分布を求めると、前記上り坂の関係で、先行車5aは検知できていない。しかしながら、前記第2の距離分布演算部22が距離分布を簡易演算した結果は、図15で示すようになり、設定部23は、この図15において、参照符号β1,β2で示す前記追突回避距離R=33(m)±α(m)の領域を第1の距離分布演算部3の処理領域に加える。これによって、実際に第1の距離分布演算部3で求められた前記追突回避距離R付近の距離分布は、図16で示すようになり、該第1の距離分布演算部3は、上り坂の関係で検知できていなかった先行車5aを捉えることができる。
【0038】
このように構成することで、設定部23は、路面のアップダウンなどで前記速度情報に対応した処理領域が正しく設定できなくても、前記第2の距離分布演算部22で簡易な演算によって求めた結果から、処理領域を正しく設定することができる。前記αは、たとえば前記道路運送車両法による自動車の分類が二輪で、区分が軽のものに対応した2.5mに設定することができるが、他の値が用いられてもよい。
【0039】
また、該測距装置21を先行車までの距離を計測する測距装置として用いるにあたって、該測距装置21には、車速センサ12からの速度情報から、先行車5a,5bへの追突を回避可能な追突回避距離Rを算出する追突回避距離算出部24を設けている。そして、設定部23が前記第2の距離分布演算部22による距離分布の演算結果において、その追突回避距離算出部24で求められた追突回避距離R±αの領域だけを、前記第1の距離分布演算部3の処理領域に設定している。これによって、前記第1の距離分布演算部3は、R+α以遠の領域は以後の処理で対応し、R−αより近い領域は既に以前の処理で対応しているものとして、現在追突回避距離R付近に存在する物体だけを該第1の距離分布演算部3が高精度に距離分布を求めるので、瞬時の処理量を一層削減することができる。
【0040】
<実施例3>
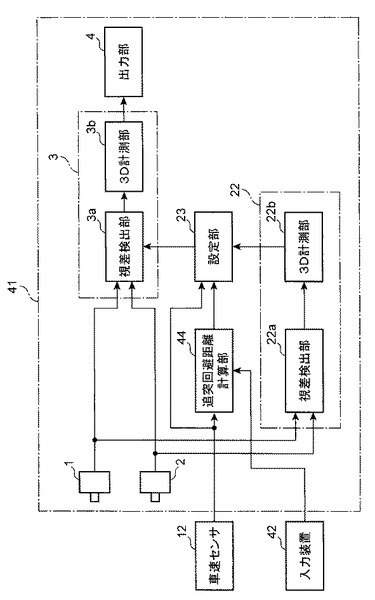
図17は、本発明の実施の第3の形態に係る測距装置41の電気的構成を示すブロック図である。この測距装置41は、前述の測距装置21に類似し、対応する部分には同一の参照符号を付して示し、その説明を省略する。注目すべきは、この測距装置41では、少なくとも路面状況(舗装の有無、晴雨または雪等)、および好ましくはタイヤ状況(種類、摩耗等)に関する車両パラメータを入力する入力装置42がさらに設けられており、追突回避距離算出部44は、前記車速センサ12からの速度情報および前記車両パラメータから、前記追突回避距離を算出することである。前記入力装置42には、たとえばタッチパネルや、表示装置に、キーボード、リモコン、マウスまたはマイクロフォンの組合わせなどが用いられる。
【0041】
具体的には、ここでは、前記追突回避距離Rとして、停止距離を考える。停止距離は、ステレオカメラ1,2が搭載されている車両6が走行している途中で、運転者が危険を感じてからブレーキをかけ、ブレーキが効き始めるまでに車が走る距離(空走距離)と、ブレーキが効き始めてから実際に車両6が停止するまでの距離(制動距離)とを合わせたものである。運転者が危険を感じて急ブレーキが必要と判断した時点から、ブレーキペダルを踏み込んでブレーキが効き始める時点までの反応時間(空走時間)は、個人差はあるが、通常人の平均的な反応時間を0.75秒として、前記空走距離が計算される。したがって、車速をV(km/h)とすると、
空走距離=0.75×V×(1000/3600)
である。
【0042】
一方、前記制動距離は、
制動距離={V×(1000/3600)}2/(2×9.8×摩擦係数)
であり、前記停止距離は、
停止距離=0.75×V×(1000/3600)
+{V×(1000/3600)}2/(2×9.8×摩擦係数)
となる。
【0043】
たとえば、車速Vが60km/h、摩擦係数が乾燥路面の0.7の場合、
0.75×60×(1000/3600)
+{60×(1000/3600)}2/(2×9.8×0.7)=32.7
となり、停止距離は32.7mとなる。
【0044】
また、運転者が入力装置42から路面状況、タイヤの種類や摩耗状態を入力すると、追突回避距離計算部44において、予め用意された摩擦係数テーブル(前記路面状況、タイヤの種類、摩耗状態をパラメータとして前記摩擦係数を決定するテーブル)や、補正係数の演算などによって、適宜前記摩擦係数が適切な値に補正される。
【0045】
このように前記追突回避距離計算部44が前記追突回避距離Rを求めるにあたって、速度情報だけでなく、少なくとも路面状況(舗装の有無、晴雨または雪等)、および好ましくはタイヤ状況(種類、摩耗等)に関する車両パラメータも考慮して算出することで、一層正確に算出することができる。
【0046】
<実施例4>
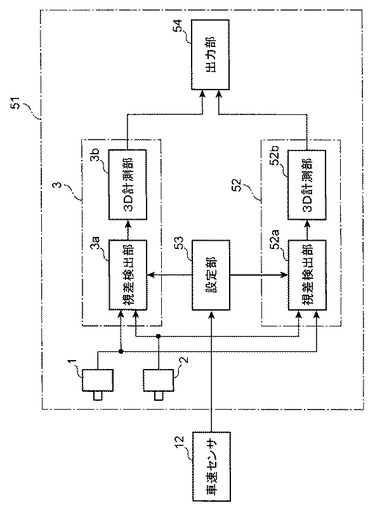
図18は、本発明の実施の第4の形態に係る測距装置51の電気的構成を示すブロック図である。この測距装置51は、前述の測距装置21,41に類似し、対応する部分には同一の参照符号を付して示し、その説明を省略する。注目すべきは、この測距装置51では、前記第1の距離分布演算部3に比べて、高速低精度な第2の距離分布演算部52をさらに備え、設定部53は、前記車速センサ12の検出結果に応答して、前記第1の距離分布演算部3の視差検出部3aに処理領域を設定するとともに、ステレオカメラ1,2の撮像画像の残余の領域を、前記第2の距離分布演算部52の視差検出部52aの処理領域に設定して処理を行わせることである。
【0047】
図19は、車両が中速(7km/h以上、60km/h未満)で移動している場合の例を示している。図19では、基準画像および参照画像の両方に対して、画像上部側の上ラインLuから下部側の下ラインLbまでの範囲が第1の距離分布演算部3の処理領域となり、上ラインLuより上側の範囲および下ラインLbより下側の範囲が第2の距離分布演算部52の処理領域となっている。
【0048】
したがって、現在の速度から、運転者などが衝突回避に必要な範囲(確実に止まれる距離範囲)を第1の距離分布演算部3が高精度な距離分布演算を行うだけでなく、それ以外の範囲は高速低精度な第2の距離分布演算部52が演算を行うことで、前記運転者は不用意な物体の飛び出しなどに対応することができるとともに、さらに遠方の先行車などを第1の距離分布演算部3で捉える前に、第2の距離分布演算部52が事前に捉え、運転者の注意喚起などに使用することもできる。
【0049】
<実施例5>
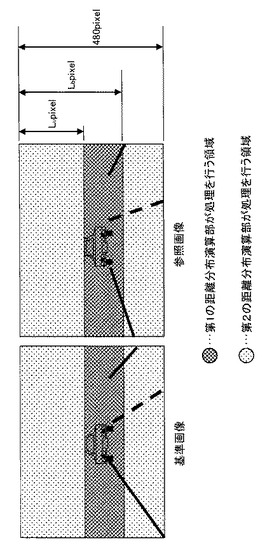
図20は、本発明の実施の第5の形態に係る測距装置における距離分布演算の方法を説明するための図である。この測距装置には、前述の測距装置51の構成を用いることができ、その説明を省略する。注目すべきは、この測距装置では、前記第2の距離分布演算部52が、前記第1の距離分布演算部3で処理されない領域の総てを処理するのではなく、その中でも、予め設定され、この図20で示すように、撮像画像上に分散した複数の狭小領域(図20では、縦方向にγ行おきに,横方向にδ列おきに設定される円形の領域)を処理可能領域とすることである。前記狭小領域は、前記設定部53によって、第2の距離分布演算部52による処理領域の設定の際に除外するように設定されてもよく、或いは、第2の距離分布演算部52に予め設定され、設定部53は上下のラインLu,Ldを設定するだけでもよい。
【0050】
このように構成することで、第2の距離分布演算部52での距離演算の処理を削減することができる。
【0051】
本明細書は、上記のように様々な態様の技術を開示しているが、そのうち主な技術を以下に纏める。
【0052】
本発明の一態様に従う測距装置は、車両に搭載され、複数の撮像部による撮像画像の視差から、第1の距離分布演算部が先行車までの距離分布を求める測距装置において、前記車両の速度情報を取得する速度検出部と、撮像画像全域を処理領域とし、前記第1の距離分布演算部に比べて、高速低精度な第2の距離分布演算部と、前記速度検出部からの速度情報から、先行車への追突を回避可能な追突回避距離を算出する追突回避距離算出部と、前記第1の距離分布演算部に、前記撮像画像における距離分布を演算するための処理領域として、前記第2の距離分布演算部による距離分布の演算結果において、前記追突回避距離算出部で求められた追突回避距離に該当する距離の領域を設定する設定部とを含む。
【0053】
上記の構成によれば、車両に搭載され、ステレオカメラなどの複数の撮像部による撮像画像の視差から、第1の距離分布演算部が対象物までの距離分布を求め、先行車の検知に使用される測距装置において、撮像画像全域を処理領域とし、前記第1の距離分布演算部に比べて、高速低精度な第2の距離分布演算部を設けるとともに、追突回避距離算出部および設定部を設け、前記追突回避距離算出部は、車速センサなどの前記車両の速度情報を取得する速度検出部の検出結果に応答して、先行車への追突を回避可能な追突回避距離を算出し、前記設定部は、前記第2の距離分布演算部による距離分布の演算結果において、その追突回避距離算出部で求められた追突回避距離に該当する距離の領域だけを前記処理領域に設定する。
【0054】
したがって、それ以遠の領域は以後の処理で対応し、近い領域は既に以前の処理で対応しているものとして、現在追突回避距離に存在する先行車だけを第1の距離分布演算部によって高精度に距離分布を求めるので、瞬時の処理量を一層削減することができる。
【0055】
本発明のさらに他の態様に従う測距装置は、少なくとも路面状況、および好ましくはタイヤ状況に関する車両パラメータを入力する入力部をさらに備え、前記追突回避距離算出部は、前記速度検出部からの速度情報および前記車両パラメータから、追突回避距離を算出する。
【0056】
上記の構成によれば、前記追突回避距離算出部は、前記追突回避距離を求めるにあたって、速度情報だけでなく、少なくとも路面状況(舗装の有無、晴雨または雪等)、および好ましくはタイヤ状況(種類、摩耗等)に関する車両パラメータも考慮して算出する。
【0057】
したがって、前記追突回避距離を一層正確に算出することができる。
【0058】
本発明を表現するために、上述において図面を参照しながら実施形態を通して本発明を適切かつ充分に説明したが、当業者であれば上述の実施形態を変更および/または改良することは容易に為し得ることであると認識すべきである。したがって、当業者が実施する変更形態または改良形態が、請求の範囲に記載された請求項の権利範囲を離脱するレベルのものでない限り、当該変更形態または改良形態は、当該請求項の権利範囲に包括されると解釈される。
【産業上の利用可能性】
【0059】
本発明によれば、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し、安全性を向上することができる測距装置を提供することができる。
【符号の説明】
【0060】
1,2 ステレオカメラ
3 第1の距離分布演算部
4,54 出力部
11,21,41 測距装置
12 車速センサ
13,23,53 設定部
22 第2の距離分布演算部
24,44 追突回避距離計算部
42 入力装置
【技術分野】
【0001】
本発明は、車両に搭載され、いわゆるステレオカメラの撮像画像などから測距を行う装置に関する。
【背景技術】
【0002】
車両の安全性を高める取り組みとして、前方の障害物を検出して危険を警告したり、先行車との距離を測って車間距離を一定に保つ装置がある。そのような従来技術として、特許文献1が提案されている。その従来技術によれば、ステレオカメラで撮影した画像が画像処理部で処理されて画像全体の3次元距離分布が演算され、その距離分布情報から道路形状や立体物の3次元位置が高速で検出されるとともに、衝突判断部で各種センサの出力から撮影画像内における自車の走行領域が求められ、その走行領域に掛かる総ての車両や障害物について衝突危険度が算出され、高い場合はユーザに報知するようになっている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平10−283593号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述の従来技術では、衝突判断部が、撮影画像内における自車の走行領域を推定し、その推定した領域内で車両や障害物の探索を行っている。しかしながら、前記衝突判断部が、前記警告などに使用しない前記走行領域以外の領域においても、前記3次元距離分布を算出しているので、計算時間が掛かってしまう。このため、前記警告などを発するまでにタイムラグが発生し、安全性が低下してしまう。また、上述の従来技術は、ステレオ法によって前記3次元距離分布を算出しているので、高速ではあるが低精度である。このため、得られた距離データの信頼性が低く、これによってもまた、安全性が低下してしまう。
【0005】
本発明の目的は、距離分布演算の計算時間を短縮することができる測距装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の一態様の測距装置は、車両に搭載され、複数の撮像部による撮像画像の視差から、第1の距離分布演算部が先行車までの距離分布を求めるにあたって、速度検出部が前記車両の速度を検出し、その速度情報から、追突回避距離算出部が先行車への追突を回避可能な追突回避距離を算出する一方、第2の距離分布演算部が、撮像画像全域を処理領域とし、前記第1の距離分布演算部に比べて、高速低精度な距離分布演算を行っており、設置部が、前記第2の距離分布演算部による距離分布の演算結果において、前記追突回避距離算出部で求められた追突回避距離に該当する距離の領域を、前記第1の距離分布演算部における処理領域に設定する。
【発明の効果】
【0007】
このように構成することで、現在の速度から、運転者などが衝突回避に必要な範囲(確実に止まれる距離範囲)だけ距離分布の演算を行うことになり、距離分布演算の計算時間を短縮し、安全性を向上することができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施の第1の形態に係る測距装置の電気的構成を示すブロック図である。
【図2】ステレオ法による測距方法を説明するための図である。
【図3】前記測距装置における視差検出部の一構成例を示すブロック図である。
【図4】図3で示す視差検出部で得られるPOC値の例を示すグラフである。
【図5】本発明の実施の第1の形態に係る設定部による距離分布演算の処理領域の設定動作を説明するための図である。
【図6】ステレオカメラの距離による視野の変化を説明するための図である。
【図7】本発明の実施の第1の形態に係る設定部による距離分布演算の処理領域の変化を説明するための図であり、低速域の場合を示す。
【図8】本発明の実施の第1の形態に係る設定部による距離分布演算の処理領域の変化を説明するための図であり、中速域の場合を示す。
【図9】本発明の実施の第1の形態に係る設定部による距離分布演算の処理領域の変化を説明するための図であり、高速域の場合を示す。
【図10】図8の処理領域で距離分布を求めた結果の一例を示す図である。
【図11】本発明の実施の第2の形態に係る測距装置の電気的構成を示すブロック図である。
【図12】図11で示す視差検出部で行われる対応点探索手法であるSAD法を説明するための図である。
【図13】図11で示す測距装置の動作を説明するための図である。
【図14】図11で示す測距装置の動作を説明するための図である。
【図15】図11で示す測距装置の動作を説明するための図である。
【図16】図11で示す測距装置の動作を説明するための図である。
【図17】本発明の実施の第3の形態に係る測距装置の電気的構成を示すブロック図である。
【図18】本発明の実施の第4の形態に係る測距装置の電気的構成を示すブロック図である。
【図19】本発明の実施の第4の形態に係る設定部による距離分布演算の処理領域の設定動作を説明するための図である。
【図20】本発明の実施の第5の形態に係る設定部による距離分布演算の処理領域の設定動作を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本発明に係る実施の一形態を図面に基づいて説明する。なお、各図において同一の符号を付した構成は、同一の構成であることを示し、その説明を省略する。
<実施例1>
図1は、本発明の実施の第1の形態に係る測距装置11の電気的構成を示すブロック図である。この測距装置11は、大略的に、車両に搭載され、複数の撮像部であるステレオカメラ1,2を使用して、それらの撮像画像の視差から、第1の距離分布演算部3が距離分布を計測し、出力部4から運転者に、対象物である先行車までの距離情報を通知するシステムである。前記出力部4には、オーディオからの音声出力、カーナビ画面への出力および表示装置への出力などが用いられ得る。前記第1の距離分布演算部3は、前記視差を求める視差検出部3aと、その求められた視差から対象物の3次元位置を計測する3D計測部3bとを備えて構成される。
【0010】
図2は、ステレオ法による測距方法を説明するための図である。前記視差検出部3aは、ステレオカメラ1,2による2つの撮像画像に対して、後述するようにして対応点探索を行い、同じ対象物5に対する位置ずれ量(=視差d)を求める。前記3D計測部3bは、求められた位置ずれ量(=視差d)から、前記ステレオ法によって対象物5までの距離を求める。図2は、少なくとも焦点距離(f)、撮像面(CCD)の画素数、1画素の大きさ(μ)が相互に等しい2台の前記ステレオカメラ1,2を用い、所定の基線長(L)だけ左右に離間させて光軸1a,2aを平行に配置して対象物5を撮影した状態を示している。この状態で、撮像面1b,2b上の視差(ずれ画素数)がd(=d1+d2)であると、対象物5までの距離(D)は、斜線を施して示す三角形が相似であることから、
D:f=L:μ×d
の関係があり、
D=(L×f)/(μ×d)
で求めることができる。
【0011】
図3は、前記視差検出部3aの一構成例を示すブロック図である。この視差検出部3aは、前記対応点探索手法として、位相限定相関法(POC法)を用いている。そして、この視差検出部3aは、変換にフーリエ変換を用い、フーリエ級数の振幅成分を抑制した位相成分のみの相関演算を行うようにした場合の処理の流れを示すものである。前記ステレオカメラ1,2による基準画像および参照画像は、フーリエ変換部31,32においてそれぞれフーリエ変換され、規格化部33,34において規格化された後、合成部35において合成され、逆フーリエ変換部36において逆フーリエ変換される。図3を数式で表すと以下のとおりである。
【0012】
【数1】
【0013】
上記POC処理で得られるPOC値は、図4に示すように、画像間(基準ウインドウと参照ウインドウ)の移動量の座標に急峻な類似度ピークを持つことが知られており、画像マッチングにおけるロバスト性が高い。そのPOCのピークの高さが、パターン類似度を示す。前記位置ズレ量(=視差d−sub)は、視差検出部3aが、POCのピーク位置を推定することで求められる。POC値は離散的に求まるので、ピーク位置をサブピクセルで補間推定することによって、前記視差検出部3aは、高分解な対応点座標を求めることができる。ピーク位置の補間推定方法としては、放物線などの関数を、フィッティングして行うことができる。そして、候補領域間の前記位置ズレ量dは、候補領域間のピクセルレベルの位置ズレ量d−pixelに、POC法で求めたサブピクセルの位置ズレ量d−subを加えた量となる。
【0014】
このように視差検出部3aは、前記撮像画像上に定めたウインドウ内のパターンを周波数分解し、振幅成分を抑制した位相成分のみの信号の類似度に基づいて対応点探索を行うことで、左右のカメラ1,2の撮影条件の差や、ノイズなどの影響を受け難く、ロバストな対応点探索を行うことができる。なお、前記ウインドウ内のパターンを周波数分解する手法には、DFT(離散フーリエ変換)を用いているけれども、FFT(高速フーリエ変換)、DCT(離散コサイン変換)、DST(離散サイン変換)、ウエーブレット変換、アダマール変換などの他の手法が用いられてもよい。前記DFTに加えて、これらの周波数分解手法は、一般的に広く用いられ、性質が安定した手法で好適である。
【0015】
また、前記POC法(位相限定相関法)では、逆フーリエ変換後に得られるPOC値は、画像間(基準ウインドウと参照ウインドウ)の移動量の座標に急峻な相関ピークを持つことが知られており、前記視差検出部3aは、対応点探索処理にこのPOC法を用いることで、画像マッチングにおけるロバスト性と移動量推定精度とが高くなり、好適である。
【0016】
上述のように構成される測距装置11において、注目すべきは、本実施の形態では、速度検出部である前記搭載車両の車速センサ12からの速度情報を取得し、その速度情報に対応して、前記第1の距離分布演算部3に、撮像画像における距離分布演算の処理領域を設定する設定部13が設けられることである。具体的には、前記設定部13は、視差検出部3aにおいて、前記視差dが求められる範囲を、速度が遅くなる程拡げ、速くなる程狭め、重要な領域のみ距離分布を算出するようにする。前記車速センサ12には、車輪回転数を基に速度を計測する装置、GPSの現在地情報を基に速度を計測する装置または加速度センサからの加速度情報を積分して速度を計測する装置などを用いることができる。
【0017】
図5は、そのような設定部13による視差dの検出範囲の設定動作を説明するための図である。この図5は、前記ステレオカメラ1,2の撮像画像の一例を示すものであり、車両から遠い位置に存在する路面は画像中の上部に映り、近い位置に存在する路面は画像中の下部に映る。またこのような状況下では、横一列のラインは路面上の同じ距離に相当する可能性が高いので、設定部13は、画像中の等距離の部分を簡単に抜き出すことができる。よって本実施の形態では、設定部13は、前記速度情報に対応した上下のラインLu,Lbで規定した横一列のライン群を、現在の速度から注視すべき前記処理領域として抽出する。こうして、設定部13は、処理領域を容易に設定することができる。
【0018】
ここで、日本交通心理学会で推奨されている危険回避に最低限必要な車間距離として、「車間距離2秒以上」がある。この危険回避に最低限必要な車間距離を安全距離(運転者が注意すべき距離を追突回避距離)とする。したがって、前記安全距離を求める計算式は、速度(km/h)をSとすると、下式で表すことができる。
【0019】
安全距離(m)=2×S×(1000/3600)
たとえば、時速60km/hで走行している場合は、安全距離は33.3mとなり、33.3m以上の車間距離が危険回避に必要な距離となる。このような安全距離(追突回避距離)が、各車速について予め計算され、後述するようにして、その安全距離の範囲が撮像画面上のどのラインからどのラインに該当するかのテーブルが求められ、このテーブルが前記設定部13に、車速−処理領域のテーブルとして予め格納されている。そして、車速が変化すると、設定部13は、前記テーブルを参照して、処理領域を規定する上下ラインLu,Lbを前記視差検出部3aに設定する。
【0020】
ここで、図6で示すように、ステレオカメラ1,2の鉛直方向の画角θおよび測距の対象物5までの距離にもよるが、該ステレオカメラ1,2の取付け高さC(これを画面中心に設定する)よりも低い位置(路面まで)は、該ステレオカメラ1,2が殆どカバーできる(捉えることができる)が、高い位置は、該ステレオカメラ1,2がどの程度までカバーするのかは、比較的任意に定められる。そこで、本実施の形態では、該ステレオカメラ1,2は、日本の道路運送車両法による自動車の分類において、四輪以上で小型と分類されている高さ2m以下をカバーするものとする(大きい車両も、前記2m以下の高さの部分で検知できる)。
【0021】
そして、図5で示すように、追突回避距離Rにおける高さ2mが、前記ステレオカメラ1,2の何画素に当るかが、前記上ラインLuとして設定部13のテーブルに格納される。また同様に、前記追突回避距離における路面が、前記ステレオカメラ1,2の何画素に当るかが、前記下ラインLbとして設定部13のテーブルに格納される。ここで、図5において、参照符号Dはステレオカメラ1,2の高さ方向の全画素数であり、参照符号Eはステレオカメラ1,2の1画素当りが受け持つ鉛直方向の高さであり、前記上下ラインLu,Lbは画素数(画素No.、以下pixelで示す)として格納される。
【0022】
以下に、前記上下ラインLu,Lb(画素数)の求め方を説明する。ステレオカメラ1,2が車両6に水平に取付けられており、前記追突回避距離R(m)だけ離れた位置での撮像画像が示す鉛直方向の長さをA(m)とすると、この高さAは下式で求めることができる。
【0023】
A=R×tan(θ/2)×2
したがって、前記追突回避距離Rの位置において、ステレオカメラ1,2の1画素当りが受け持つ前記鉛直方向の高さE(m/pixel)は、前記全画素数をDとすると、下式で求めることができる。
【0024】
E=A/D
そして、図5に示すように画像原点(0pixel)を左上とした場合、中心ラインCから画像上方向に世界座標系で、B−C(=0.5m)進めた位置(ステレオカメラ1,2から追突回避距離Rだけ離れた位置における小型車の高さ限界)に相当する画像上の位置である前記上ラインLu(pixel)は、下式で求めることができる。
【0025】
Lu=(D/2)−((B−C)/E) (ただし、0≦Lu<D/2)
また、図5の中心ラインCから画像下方向に世界座標系でC(=1.5m)進めた位置(ステレオカメラ1,2から追突回避距離Rだけ離れた位置における路面の高さ)に相当する画像上の位置である前記下ラインLb(pixel)は、下式で求めることができる。
【0026】
Lb=(D/2)+(C/E) (ただし、D/2<Lb≦B)
具体的には、前記ステレオカメラ1,2の鉛直方向の画角θを40°、鉛直方向の画素数を480pixel、追突回避距離Rを安全距離とした場合、該測距装置11が搭載された車両が時速7km/h(低速と中速の閾値)で走行していた場合、Lu=46pixel,Lb=480pixelとなる。これに対して、前記車両が時速60km/h(中速と高速の閾値)で走行していた場合、Lu=230pixel,Lb=270pixelとなる。以下、低速は、該測距装置11が搭載される車両(自動車)6のクリープ現象での最高速度である前記7km/h未満、高速は高速道路を走行する際の最低速度である60km/h以上、中速はそれらの間の7km/h以上、60km/h未満とするが、他の値でも構わない。
【0027】
図7〜図9には、ステレオカメラ1,2から追突回避距離Rだけ離れた地点で、処理領域となる上述のようにして求められた路面から高さ2mまでの範囲の違いが示されている。前記処理領域は、網掛けして示しており、図7は前記低速域のLu=46pixel,Lb=480pixelの場合を示す。図8は中速域であり、図9は高速域のLu=230pixel,Lb=270pixelの場合を示している。設定部13は、車速に対応して前記テーブルから読出したこれらの上下ラインLu,Lbの値を視差検出部3aに設定し、視差検出部3aは、それらの上下ラインLu,Lb間の処理領域のみ対応点探索を行い、視差dを求める。図8のような処理領域で距離分布が求められると、図10で示すようになる。
【0028】
このように設定部13が車速に応じて対応点探索、したがって距離分布演算の処理領域を設定することで、距離分布演算部3は、現在の速度から、運転者などが衝突回避に必要な範囲(確実に止まれる距離範囲)だけ距離分布の演算を行うことになり、距離分布演算の計算時間を短縮し、安全性を向上することができる。
【0029】
<実施例2>
図11は、本発明の実施の第2の形態に係る測距装置21の電気的構成を示すブロック図である。この測距装置21は、前述の測距装置11に類似し、対応する部分には同一の参照符号を付して示し、その説明を省略する。注目すべきは、この測距装置21は、撮像画像全域を前記処理領域とし、前記第1の距離分布演算部3に比べて、高速低精度な第2の距離分布演算部22をさらに備え、設定部23は、前記車速センサ12の検出結果に加えて、前記第2の距離分布演算部22による距離分布の演算結果から、前記第1の距離分布演算部3に、前記撮像画像における距離分布演算の処理領域を設定することである。
【0030】
具体的には、前記第2の距離分布演算部22は、前記ステレオカメラ1,2から入力された撮像画像から、SAD法によって高速に対応点探索を行い、視差を求める視差検出部22aと、求められた視差からステレオ法で対象物5までの距離を求める3D計測部22bとを備えて構成される。3D計測部22bで求められた距離分布は設定部23に入力される。一方、前記車速センサ12からの車速情報は追突回避距離算出部24に入力され、この追突回避距離算出部24において前述のように車速に対応した追突回避距離Rが求められ、前記設定部23に入力される。設定部23は、上述のようにして車速から予め求められている処理領域に、この3D計測部22bで求められた距離分布の内、前記追突回避距離から±αの距離に該当する部分を、第1の距離分布演算部3の処理領域に加える。
【0031】
図12は、前記視差検出部22aで行われる対応点探索手法である前記SAD法を説明するための図である。このSAD法では、前記視差検出部22aは、基準画像1c上の画像Img1が参照画像2c上のどこにあるのかを探索する。具体的には、前記視差検出部22aは、前記基準画像1c上で、縦横方向にそれぞれW画素分の大きさを持つウインドウ(前記画像Img1)を設定し、同様に、参照画像2c上にも同じ大きさを持つウインドウ(前記画像Img2)を設定する。そして、前記視差検出部22aは、参照画像2c上において、基準画像1c上におけるウインドウImg1と同じ位置から、基線長方向に或る範囲(0<p<max_disp)でウインドウImg2の走査を開始させて、それぞれの位置で相関演算を行う。その相関演算には、前記視差検出部22aは、先ず、下式で示すように、ウインドウの同じ対応画素の明るさの差の絶対値をそれぞれ求める。
【0032】
【数2】
【0033】
次に、前記視差検出部22aは、それをウインドウ内の全画素に亘って加算した値SADpから、下式によって相関値(COR)を求める。
【0034】
【数3】
【0035】
前記視差検出部22aは、このような作業を1画素ずつずらして行ってゆき、最も相関値の高いウインドウ位置に画像Img1と等しい画像があると判定し、そのずらした画素数を前記視差dとする。なお、この説明では、前記視差検出部22aはピクセル単位で最も相関値の高い位置から視差dを求めているが、ピーク前後の相関値を用いて、サブピクセル単位でピークを補間して求めてもよい。
【0036】
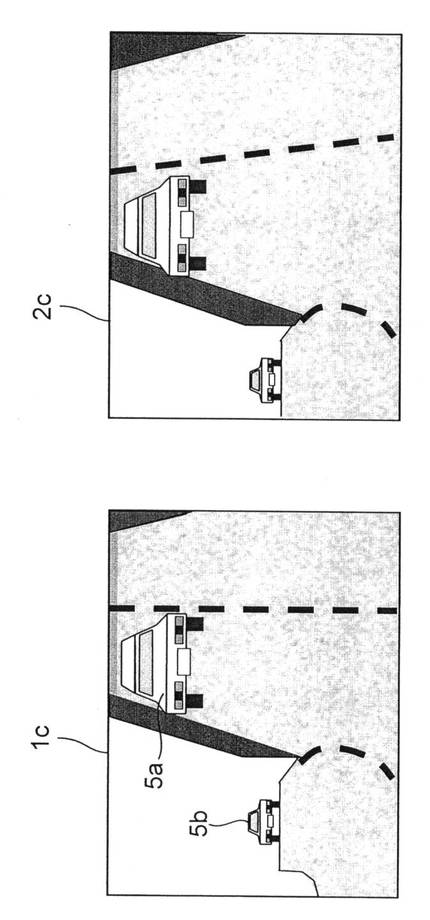
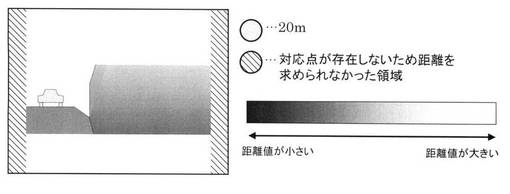
図13〜図16は、この測距装置21の動作を説明するための図である。ステレオカメラ1,2の撮像画像が図13で示すような場合、前記第1の距離分布演算部3が上述のように単に速度に対応した上下ラインLu,Lbで規定した処理領域について距離分布を求めると、図14で示すようになる。これらの図13〜図16の例は、中速で上り坂にさしかかる箇所を走行している例を示しており、対象物5である先行車5a,5bが存在し、先行車5aは前記追突回避距離Rである20m付近に存在するものの、上り坂の関係で、撮像画面上に映る位置が速度に相当した位置よりも上になっており、これに対して先行車5bは、同じ高さの路面の遠くを走行している。
【0037】
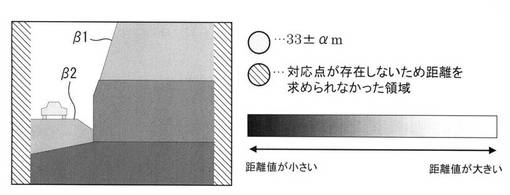
したがって、前記第1の距離分布演算部3が単に速度に対応した上下ラインLu,Lbで規定した処理領域について距離分布を求めると、前記上り坂の関係で、先行車5aは検知できていない。しかしながら、前記第2の距離分布演算部22が距離分布を簡易演算した結果は、図15で示すようになり、設定部23は、この図15において、参照符号β1,β2で示す前記追突回避距離R=33(m)±α(m)の領域を第1の距離分布演算部3の処理領域に加える。これによって、実際に第1の距離分布演算部3で求められた前記追突回避距離R付近の距離分布は、図16で示すようになり、該第1の距離分布演算部3は、上り坂の関係で検知できていなかった先行車5aを捉えることができる。
【0038】
このように構成することで、設定部23は、路面のアップダウンなどで前記速度情報に対応した処理領域が正しく設定できなくても、前記第2の距離分布演算部22で簡易な演算によって求めた結果から、処理領域を正しく設定することができる。前記αは、たとえば前記道路運送車両法による自動車の分類が二輪で、区分が軽のものに対応した2.5mに設定することができるが、他の値が用いられてもよい。
【0039】
また、該測距装置21を先行車までの距離を計測する測距装置として用いるにあたって、該測距装置21には、車速センサ12からの速度情報から、先行車5a,5bへの追突を回避可能な追突回避距離Rを算出する追突回避距離算出部24を設けている。そして、設定部23が前記第2の距離分布演算部22による距離分布の演算結果において、その追突回避距離算出部24で求められた追突回避距離R±αの領域だけを、前記第1の距離分布演算部3の処理領域に設定している。これによって、前記第1の距離分布演算部3は、R+α以遠の領域は以後の処理で対応し、R−αより近い領域は既に以前の処理で対応しているものとして、現在追突回避距離R付近に存在する物体だけを該第1の距離分布演算部3が高精度に距離分布を求めるので、瞬時の処理量を一層削減することができる。
【0040】
<実施例3>
図17は、本発明の実施の第3の形態に係る測距装置41の電気的構成を示すブロック図である。この測距装置41は、前述の測距装置21に類似し、対応する部分には同一の参照符号を付して示し、その説明を省略する。注目すべきは、この測距装置41では、少なくとも路面状況(舗装の有無、晴雨または雪等)、および好ましくはタイヤ状況(種類、摩耗等)に関する車両パラメータを入力する入力装置42がさらに設けられており、追突回避距離算出部44は、前記車速センサ12からの速度情報および前記車両パラメータから、前記追突回避距離を算出することである。前記入力装置42には、たとえばタッチパネルや、表示装置に、キーボード、リモコン、マウスまたはマイクロフォンの組合わせなどが用いられる。
【0041】
具体的には、ここでは、前記追突回避距離Rとして、停止距離を考える。停止距離は、ステレオカメラ1,2が搭載されている車両6が走行している途中で、運転者が危険を感じてからブレーキをかけ、ブレーキが効き始めるまでに車が走る距離(空走距離)と、ブレーキが効き始めてから実際に車両6が停止するまでの距離(制動距離)とを合わせたものである。運転者が危険を感じて急ブレーキが必要と判断した時点から、ブレーキペダルを踏み込んでブレーキが効き始める時点までの反応時間(空走時間)は、個人差はあるが、通常人の平均的な反応時間を0.75秒として、前記空走距離が計算される。したがって、車速をV(km/h)とすると、
空走距離=0.75×V×(1000/3600)
である。
【0042】
一方、前記制動距離は、
制動距離={V×(1000/3600)}2/(2×9.8×摩擦係数)
であり、前記停止距離は、
停止距離=0.75×V×(1000/3600)
+{V×(1000/3600)}2/(2×9.8×摩擦係数)
となる。
【0043】
たとえば、車速Vが60km/h、摩擦係数が乾燥路面の0.7の場合、
0.75×60×(1000/3600)
+{60×(1000/3600)}2/(2×9.8×0.7)=32.7
となり、停止距離は32.7mとなる。
【0044】
また、運転者が入力装置42から路面状況、タイヤの種類や摩耗状態を入力すると、追突回避距離計算部44において、予め用意された摩擦係数テーブル(前記路面状況、タイヤの種類、摩耗状態をパラメータとして前記摩擦係数を決定するテーブル)や、補正係数の演算などによって、適宜前記摩擦係数が適切な値に補正される。
【0045】
このように前記追突回避距離計算部44が前記追突回避距離Rを求めるにあたって、速度情報だけでなく、少なくとも路面状況(舗装の有無、晴雨または雪等)、および好ましくはタイヤ状況(種類、摩耗等)に関する車両パラメータも考慮して算出することで、一層正確に算出することができる。
【0046】
<実施例4>
図18は、本発明の実施の第4の形態に係る測距装置51の電気的構成を示すブロック図である。この測距装置51は、前述の測距装置21,41に類似し、対応する部分には同一の参照符号を付して示し、その説明を省略する。注目すべきは、この測距装置51では、前記第1の距離分布演算部3に比べて、高速低精度な第2の距離分布演算部52をさらに備え、設定部53は、前記車速センサ12の検出結果に応答して、前記第1の距離分布演算部3の視差検出部3aに処理領域を設定するとともに、ステレオカメラ1,2の撮像画像の残余の領域を、前記第2の距離分布演算部52の視差検出部52aの処理領域に設定して処理を行わせることである。
【0047】
図19は、車両が中速(7km/h以上、60km/h未満)で移動している場合の例を示している。図19では、基準画像および参照画像の両方に対して、画像上部側の上ラインLuから下部側の下ラインLbまでの範囲が第1の距離分布演算部3の処理領域となり、上ラインLuより上側の範囲および下ラインLbより下側の範囲が第2の距離分布演算部52の処理領域となっている。
【0048】
したがって、現在の速度から、運転者などが衝突回避に必要な範囲(確実に止まれる距離範囲)を第1の距離分布演算部3が高精度な距離分布演算を行うだけでなく、それ以外の範囲は高速低精度な第2の距離分布演算部52が演算を行うことで、前記運転者は不用意な物体の飛び出しなどに対応することができるとともに、さらに遠方の先行車などを第1の距離分布演算部3で捉える前に、第2の距離分布演算部52が事前に捉え、運転者の注意喚起などに使用することもできる。
【0049】
<実施例5>
図20は、本発明の実施の第5の形態に係る測距装置における距離分布演算の方法を説明するための図である。この測距装置には、前述の測距装置51の構成を用いることができ、その説明を省略する。注目すべきは、この測距装置では、前記第2の距離分布演算部52が、前記第1の距離分布演算部3で処理されない領域の総てを処理するのではなく、その中でも、予め設定され、この図20で示すように、撮像画像上に分散した複数の狭小領域(図20では、縦方向にγ行おきに,横方向にδ列おきに設定される円形の領域)を処理可能領域とすることである。前記狭小領域は、前記設定部53によって、第2の距離分布演算部52による処理領域の設定の際に除外するように設定されてもよく、或いは、第2の距離分布演算部52に予め設定され、設定部53は上下のラインLu,Ldを設定するだけでもよい。
【0050】
このように構成することで、第2の距離分布演算部52での距離演算の処理を削減することができる。
【0051】
本明細書は、上記のように様々な態様の技術を開示しているが、そのうち主な技術を以下に纏める。
【0052】
本発明の一態様に従う測距装置は、車両に搭載され、複数の撮像部による撮像画像の視差から、第1の距離分布演算部が先行車までの距離分布を求める測距装置において、前記車両の速度情報を取得する速度検出部と、撮像画像全域を処理領域とし、前記第1の距離分布演算部に比べて、高速低精度な第2の距離分布演算部と、前記速度検出部からの速度情報から、先行車への追突を回避可能な追突回避距離を算出する追突回避距離算出部と、前記第1の距離分布演算部に、前記撮像画像における距離分布を演算するための処理領域として、前記第2の距離分布演算部による距離分布の演算結果において、前記追突回避距離算出部で求められた追突回避距離に該当する距離の領域を設定する設定部とを含む。
【0053】
上記の構成によれば、車両に搭載され、ステレオカメラなどの複数の撮像部による撮像画像の視差から、第1の距離分布演算部が対象物までの距離分布を求め、先行車の検知に使用される測距装置において、撮像画像全域を処理領域とし、前記第1の距離分布演算部に比べて、高速低精度な第2の距離分布演算部を設けるとともに、追突回避距離算出部および設定部を設け、前記追突回避距離算出部は、車速センサなどの前記車両の速度情報を取得する速度検出部の検出結果に応答して、先行車への追突を回避可能な追突回避距離を算出し、前記設定部は、前記第2の距離分布演算部による距離分布の演算結果において、その追突回避距離算出部で求められた追突回避距離に該当する距離の領域だけを前記処理領域に設定する。
【0054】
したがって、それ以遠の領域は以後の処理で対応し、近い領域は既に以前の処理で対応しているものとして、現在追突回避距離に存在する先行車だけを第1の距離分布演算部によって高精度に距離分布を求めるので、瞬時の処理量を一層削減することができる。
【0055】
本発明のさらに他の態様に従う測距装置は、少なくとも路面状況、および好ましくはタイヤ状況に関する車両パラメータを入力する入力部をさらに備え、前記追突回避距離算出部は、前記速度検出部からの速度情報および前記車両パラメータから、追突回避距離を算出する。
【0056】
上記の構成によれば、前記追突回避距離算出部は、前記追突回避距離を求めるにあたって、速度情報だけでなく、少なくとも路面状況(舗装の有無、晴雨または雪等)、および好ましくはタイヤ状況(種類、摩耗等)に関する車両パラメータも考慮して算出する。
【0057】
したがって、前記追突回避距離を一層正確に算出することができる。
【0058】
本発明を表現するために、上述において図面を参照しながら実施形態を通して本発明を適切かつ充分に説明したが、当業者であれば上述の実施形態を変更および/または改良することは容易に為し得ることであると認識すべきである。したがって、当業者が実施する変更形態または改良形態が、請求の範囲に記載された請求項の権利範囲を離脱するレベルのものでない限り、当該変更形態または改良形態は、当該請求項の権利範囲に包括されると解釈される。
【産業上の利用可能性】
【0059】
本発明によれば、先行車の検知に使用される測距装置において、距離分布演算の計算時間を短縮し、安全性を向上することができる測距装置を提供することができる。
【符号の説明】
【0060】
1,2 ステレオカメラ
3 第1の距離分布演算部
4,54 出力部
11,21,41 測距装置
12 車速センサ
13,23,53 設定部
22 第2の距離分布演算部
24,44 追突回避距離計算部
42 入力装置
【特許請求の範囲】
【請求項1】
車両に搭載され、複数の撮像部による撮像画像の視差から、第1の距離分布演算部が先行車までの距離分布を求める測距装置において、
前記車両の速度情報を取得する速度検出部と、
撮像画像全域を処理領域とし、前記第1の距離分布演算部に比べて、高速低精度な第2の距離分布演算部と、
前記速度検出部からの速度情報から、先行車への追突を回避可能な追突回避距離を算出する追突回避距離算出部と、
前記第1の距離分布演算部に、前記撮像画像における距離分布を演算するための処理領域として、前記第2の距離分布演算部による距離分布の演算結果において、前記追突回避距離算出部で求められた追突回避距離に該当する距離の領域を設定する設定部とを含むことを特徴とする測距装置。
【請求項2】
路面状況に関するパラメータを入力する入力部をさらに備え、
前記追突回避距離算出部は、前記速度検出部からの速度情報および前記車両パラメータから、追突回避距離を算出することを特徴とする請求項1記載の測距装置。
【請求項3】
前記入力部は、さらにタイヤ状況に関するパラメータを入力することを特徴とする請求項2記載の測距装置。
【請求項1】
車両に搭載され、複数の撮像部による撮像画像の視差から、第1の距離分布演算部が先行車までの距離分布を求める測距装置において、
前記車両の速度情報を取得する速度検出部と、
撮像画像全域を処理領域とし、前記第1の距離分布演算部に比べて、高速低精度な第2の距離分布演算部と、
前記速度検出部からの速度情報から、先行車への追突を回避可能な追突回避距離を算出する追突回避距離算出部と、
前記第1の距離分布演算部に、前記撮像画像における距離分布を演算するための処理領域として、前記第2の距離分布演算部による距離分布の演算結果において、前記追突回避距離算出部で求められた追突回避距離に該当する距離の領域を設定する設定部とを含むことを特徴とする測距装置。
【請求項2】
路面状況に関するパラメータを入力する入力部をさらに備え、
前記追突回避距離算出部は、前記速度検出部からの速度情報および前記車両パラメータから、追突回避距離を算出することを特徴とする請求項1記載の測距装置。
【請求項3】
前記入力部は、さらにタイヤ状況に関するパラメータを入力することを特徴とする請求項2記載の測距装置。
【図1】

【図2】
【図3】
【図5】
【図7】
【図8】
【図9】
【図11】
【図17】
【図18】
【図19】
【図20】
【図4】
【図6】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図5】
【図7】
【図8】
【図9】
【図11】
【図17】
【図18】
【図19】
【図20】
【図4】
【図6】
【図10】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2013−7748(P2013−7748A)
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願番号】特願2012−165000(P2012−165000)
【出願日】平成24年7月25日(2012.7.25)
【分割の表示】特願2009−553306(P2009−553306)の分割
【原出願日】平成20年2月14日(2008.2.14)
【出願人】(000001270)コニカミノルタホールディングス株式会社 (4,463)
【Fターム(参考)】
【公開日】平成25年1月10日(2013.1.10)
【国際特許分類】
【出願日】平成24年7月25日(2012.7.25)
【分割の表示】特願2009−553306(P2009−553306)の分割
【原出願日】平成20年2月14日(2008.2.14)
【出願人】(000001270)コニカミノルタホールディングス株式会社 (4,463)
【Fターム(参考)】
[ Back to top ]