
溶接用ケーブル
【課題】本発明は曲げや捻りに強く寿命の長い溶接用ケーブルを提供する。
【解決手段】溶接トーチに電力を供給する溶接用ケーブル38であって、電力を供給する複数の導電体4と、この複数の導電体4を1つに束ねるように重ねて巻きつけた押え巻きテープ5と、この押え巻きテープ5を被覆するシース10とを備えた溶接用ケーブル38において、前記溶接用ケーブルに外力が働いたときに前記シース10との間で滑りにくく前記押え巻きテープ5との間で滑りやすい摩擦係数を有しこの押え巻きテープの外周面に重ねて巻きつけた介在テープ6を備えたことを特徴とする溶接用ケーブル。
【解決手段】溶接トーチに電力を供給する溶接用ケーブル38であって、電力を供給する複数の導電体4と、この複数の導電体4を1つに束ねるように重ねて巻きつけた押え巻きテープ5と、この押え巻きテープ5を被覆するシース10とを備えた溶接用ケーブル38において、前記溶接用ケーブルに外力が働いたときに前記シース10との間で滑りにくく前記押え巻きテープ5との間で滑りやすい摩擦係数を有しこの押え巻きテープの外周面に重ねて巻きつけた介在テープ6を備えたことを特徴とする溶接用ケーブル。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、溶接トーチに電力を供給するための溶接用ケーブルに関するものである。
【背景技術】
【0002】
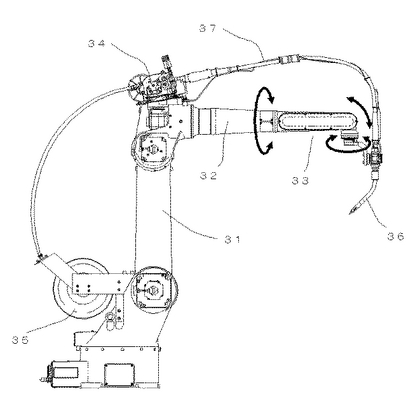
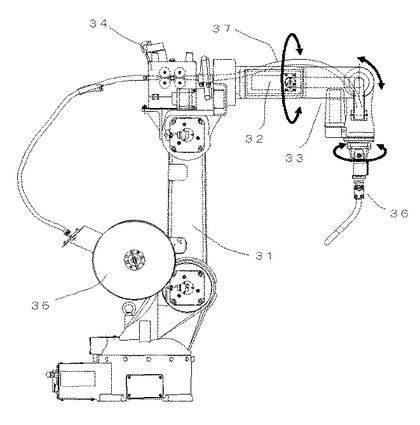
従来から溶接の作業効率を向上させるために、溶接ロボットを用いて溶接を自動化することが広く行われている。図3は、溶接トーチを多関節ロボットのアーム先端に取り付けて、アーク溶接を行うときの溶接ロボットの一般的な構成を示す図である。
【0003】
同図において、多関節ロボット31の上部アーム32の先端に、旋回、振り、及び回転の3自由度を持つ手首部33が取り付けられている。ワイヤ送給機34は上部アーム32に固定されていて、ワイヤリール35に巻かれた溶接ワイヤを溶接用ケーブル37を挿通して、溶接トーチ36に供給する。(例えば、特許文献1参照。)。
【0004】
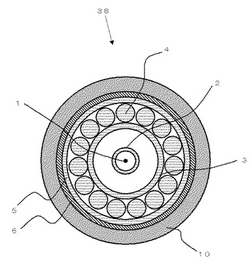
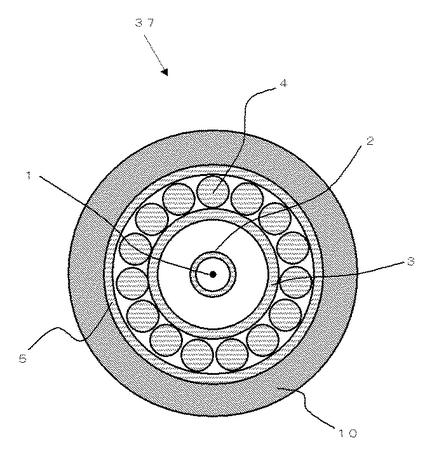
図4は、従来技術の溶接用ケーブル37の横断面図である。同図において、コイルライナ2は、溶接ワイヤ1をガイドする。ガスホース3は、コイルライナ2の外周に設けられて、シールドガスを流す。複数の導電体4は、ガスホース3の外周に設けられて、電力を供給する。
【0005】
押え巻きテープ5を、複数の導電体4を1つに束ねるように巻きつけている。複数の導電体4を固定するために、この紙テープ5を、例えば、3kgf前後の引張荷重で強固に巻きつけている。また、この押え巻きテープ5として、導電体4を絶縁する機能も果たすために、通常、紙テープ(例えば、株式会社奥田製の絶縁紙)を採用している。
【0006】
シース10は、押え巻きテープ5を被覆して導電体4を絶縁している。このシース10は合成ゴムを素材としたものを採用している。この合成ゴムは、紙と吸いつき易い性質が有る。従って、紙を素材とした押え巻きテープ5の周囲に合成ゴムを素材としたシース10を被覆すると、シース10と押え巻きテープ5とが吸いつくために、ほぼ一体と成って動作するように成る。この結果、複数の導電体4と押え巻きテープ5とシース10とは、ほぼ一体と成って動作する。
【0007】
上述したように、溶接用ケーブル37は多重構造であるために、曲げ剛性が高く、曲げ難い。そのために、図3に示した手首部33が旋回、振り及び回転の動作を行うときに、溶接用ケーブル37が柔軟に動作するように、ケーブル長に余裕を持たせて取り付けている。
【0008】
以下、図3及び図4を参照して、動作を説明する。
ワイヤ送給機34によって、ワイヤリール35に巻かれた溶接ワイヤ1が送給されて、溶接用ケーブル37内のコイルライナ2によってガイドされて、溶接トーチ36へ送給される。ガスボンベ(図示を省略)から噴出されたシールドガスが、溶接用ケーブル37内のガスホース3を通って溶接トーチ36に噴出される。溶接用電源装置(図示を省略)から供給された電力が、溶接用ケーブル37内の導電体4によって溶接トーチ36へ供給される。
【0009】
そして、多関節ロボット31の手首部33が旋回、振り及び回転の動作を行っても、溶接用ケーブル37のケーブル長に余裕を持たせているので、溶接用ケーブル37は柔軟に動作することができる。しかし、後述する課題を有する。
【特許文献1】特開2003−230963号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
上述したように、溶接用ケーブル37は、多関節ロボット31の動作に応じて柔軟に動作するように取り付けられている。しかし、作業者が教示するタスクプログラムに従って、多関節ロボット31を連続運転するとき、3自由度を持つ手首部33は、旋回、振り及び回転の動作を頻繁に繰り返すので、溶接用ケーブル37に、捻り、曲げ及び引っ張り等の外力が継続して働く。これらの外力が溶接用ケーブル37に働いたときの動作を図5を参照して説明する
【0011】
図5(A)は、溶接用ケーブル37にねじりの外力が働いたときの動作を説明するための横断面図であって、同図(B)は、溶接用ケーブル37に曲げの外力が働いたときの動作を説明するための縦断面図である。同図において、説明を容易にするために、図4に示した押え巻きテープ5によって1つに束ねられた導電体4を、導電体・紙テープ部11とし、また、溶接ワイヤ1、コイルライナ2及びガスホース3を省略している。
【0012】
図5(A)において、溶接用ケーブル37にねじりの外力12が加わって、シース10がねじられると、上述したように、導電体・紙テープ部11とシース10とは、ほぼ一体と成って動作するために、導電体・紙テープ部11も同様にねじられる。従って、溶接用ケーブル37にねじりの外力12が加わると、導電体・紙テープ部11にも略同等の捻りの外力13が働く。
【0013】
図5(B)において、溶接用ケーブル37に曲げの外力14が加わったときも同様に、導電体・紙テープ部11も曲げられる。従って、溶接用ケーブル37に曲げの外力14が加わると、導電体・紙テープ部11にも略同等の曲げの外力15が働く。
【0014】
従って、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を頻繁に繰返して、溶接用ケーブル37に、捻り、曲げ及び引っ張り等の外力が継続して働くと、押え巻きテープ5によって束ねられた導電体4に、捻り、曲げ及び引っ張り等の外力がほぼそのまま加わることになる。その結果、連続運転を続けるうちに押え巻きテープ5及び導電体4が摩耗し、導電体4が断線したり、導電体がむき出しに成る問題が発生していた。そのため、溶接用ケーブル37の交換周期が短く、コストや交換の工数が掛かり、作業効率が低下している。
【0015】
さらに、近年のロボットには溶接用ケーブル37が周辺治具や溶接対象となるワークと干渉しないように、ロボットの上部アームに溶接用ケーブル37を内蔵させたものも提案されている。図6は、このロボットの構成を示している。同図の溶接用ケーブル37は、上部アーム32に内蔵させているために、図3に示した溶接ロボットよりも溶接用ケーブル37の曲げ半径を小さくして、たるみの持たせ方を小さくせざるを得ないために、ロボットの動作に応じてやや変形しにくい構造となっている。即ち、図3の構成にした場合よりも余分な外力が働くことになるために、溶接用ケーブル37の寿命がさらに短くなる問題を有していた。本発明は曲げや捻りに強く寿命の長い溶接用ケーブルを提供することを目的としている。
【課題を解決するための手段】
【0016】
上記目的を達成するために、第1の発明は、溶接トーチに電力を供給する溶接用ケーブルであって、前記電力を供給する複数の導電体と、この複数の導電体を1つに束ねるように重ねて巻きつけた押え巻きテープと、この押え巻きテープを被覆するシースとを備えた溶接用ケーブルにおいて、
前記溶接用ケーブルに外力が働いたときに前記シースとの間で滑りにくく前記押え巻きテープとの間で滑りやすい摩擦係数を有しこの押え巻きテープの外周面に重ねて巻きつけた介在テープを備えたことを特徴とする溶接用ケーブルである。
【0017】
第2の発明は、第1の発明に記載の押え巻きテープはテトロンテープであり、介在テープは紙テープであることを特徴とする溶接用ケーブルである。
【発明の効果】
【0018】
この結果、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を頻繁に繰返して、溶接用ケーブル38に、捻り、曲げ及び引っ張り等の外力が継続して働いても、押え巻きテープ5によって束ねられた導電体4に働く外力は、シース10に働くよりも著しく小さい外力と成る。従って、多関節ロボット31を連続して長時間運転しても、押え巻きテープ5及び導電体4が摩耗することを大幅に減少することができるので、導電体4が断線したり、導電体4がむき出しに成ることを減少させることができる。そのため、溶接用ケーブル38の交換周期が長く成り、コストや交換の工数を低減することができ、作業効率を向上させることができる。
【0019】
例えば、数十台の多関節ロボット31を同時に稼働させて自動車の部品などを加工する生産ラインにおいて、わずか1台でも多関節ロボット31の溶接用ケーブル38の導電体4が断線したり、むき出しに成ると、溶接用ケーブル38の交換のために生産ライン全体を停止する必要があるために、生産量に悪影響を及ぼす。しかし、溶接用ケーブル38の交換周期が長く成ることで交換頻度が下がるため、コストや交換の工数を低減することができ、作業効率を向上させることができる。さらに、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を行うときに、従来技術の溶接用ケーブル37よりも柔軟に動作させることができる。
【0020】
また、溶接用ケーブル38が周辺治具や被溶接物と干渉して、シース10が破れることがある。作業者がこのことに気付かずに連続運転を繰り返し、シースの破れた部分が周辺治具やワークと干渉を続けると、導電体を断線させることに成る。本発明の溶接用ケーブル38は、導電体4に、押え巻きテープ5と介在テープ6との2種類のテープを巻いているので、シース10が破れた場合でも、導電体4を従来よりも、より保護することができる。
【発明を実施するための最良の形態】
【0021】
発明の実施の形態を実施例に基づき図面を参照して説明する。
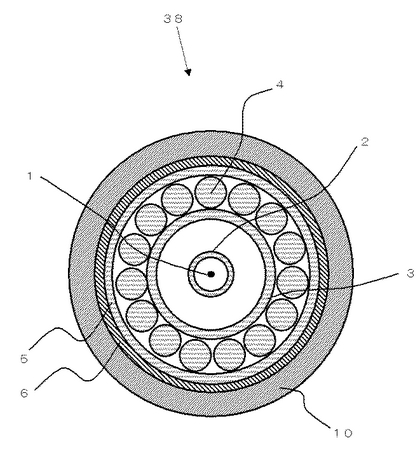
図1は本発明の溶接用ケーブルの横断面図である。同図において、押え巻きテープ5の外周面に介在テープ6を重ねて巻きつけている。その他の機能は、図4の従来技術の溶接用ケーブルの同機能に同符号を付して、説明を省略する。
【0022】
発明者らは、溶接用ケーブルにねじりや曲げの外力が働いたときに、その外力が押え巻きテープ5及び導電体4に伝わることを減少させる方法として、押え巻きテープ5の外周面に介在テープ6を重ねて巻きつける。そして、押え巻きテープ5と導電体4とが一体として動作し、また介在テープ6とシース10とが一体として動作し、かつ押え巻きテープ5と介在テープ6との間の摩擦を減少させて、滑りが発生する方法を発明した。そして、この方法を実現するための各テープの素材を選定するために種々の実験を重ねた結果、以下の素材に決定した。
【0023】
押え巻きテープ5は、網目状に織り込まれたテトロンを素材とし、かつ、その片面がゴム引き加工されているテトロンテープとする。(例えば、福岡クロス工業株式会社製のテトロンゴム引テープ(商品名))。このテトロンテープのゴム引き加工された面を、導電体4に接するように重ねて巻きつける。巻きつけるときの引張荷重による巻きつけ強度に加えて、ゴム引き加工面が導電体4との接触によって摩擦が発生することによって、導電体4と押え巻きテープ5とが一体化して動作することができる。
【0024】
また、介在テープ6は、紙テープ(例えば、株式会社奥田製の絶縁紙)とする。この紙テープは、押え巻きテープに使用するテトロンテープとの接触面で滑りが発生し易い。また、この紙テープは、シース10の素材である合成ゴムと吸いつき易い。そのために、介在テープ6として紙テープを使用し、押え巻きテープ5の外周面に重ねて巻き、この介在テープ6をシース10が被覆すると、介在テープ6は、シース10と略一体と成って動作し、介在テープ6と抑え巻きテープとの間で滑りが発生する。
【0025】
本発明の溶接用ケーブルの動作において、溶接トーチ36へ溶接ワイヤ1が送給され、シールドガスが噴出され、電力が供給される動作は、図3及び図4を参照して説明した従来技術の動作と同じであるので説明を省略する。その他の多関節ロボット31の手首部33が旋回、振り及び回転の動作を行うときに、溶接用ケーブル38に外力が働くが、そのときの溶接用ケーブル38の動作を、以下、図2を参照して説明する。
【0026】
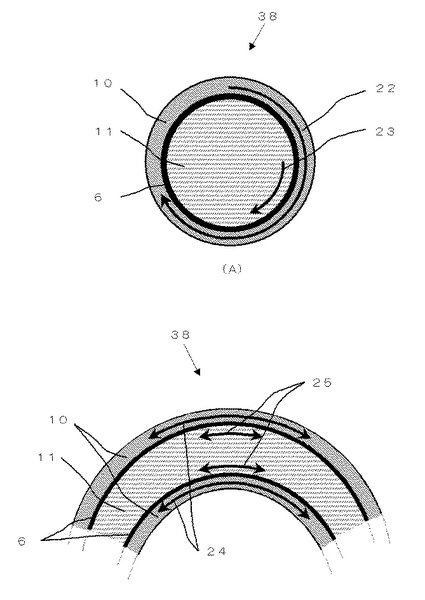
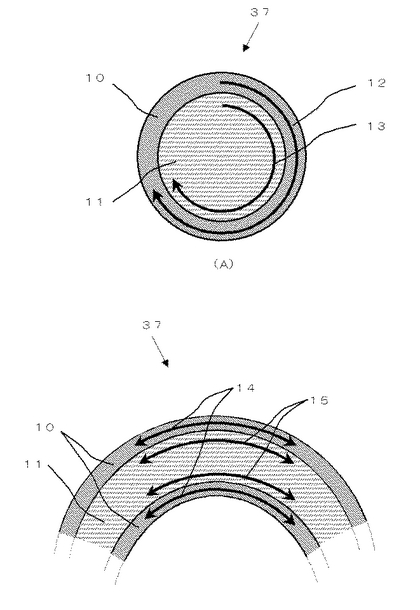
図2(A)は、本発明の溶接用ケーブル38にねじりの外力が働いたときの動作を説明するための横断面図であって、同図(B)は、溶接用ケーブル38に曲げの外力が働いたときの動作を説明するための縦断面図である。同図において、説明を容易にするために、図1に示した押え巻きテープ5によって1つに束ねられた導電体4を、導電体・巻きテープ部11とし、溶接ワイヤ1、コイルライナ2及びガスホース3を省略している。
【0027】
図2(A)において、溶接用ケーブル38にねじりの外力22が働いて、シース10がねじられると、上述したように、介在テープ6は、シース10と略一体と成って動作するので、介在テープ6へもねじりの外力12が加わる。このとき、導電体・巻きテープ部11と介在テープ6との間において滑りが発生するので、導電体・巻きテープ部11に働く外力23は、シース10に働く外力22よりも著しく小さい外力となる。
【0028】
図2(B)において、溶接用ケーブル38に曲げの外力25が働いたときも同様に、導電体・巻きテープ部11と介在テープ6との間において滑りが発生するので、導電体・巻きテープ部11に働く外力24は、シース10に働く外力25よりも著しく小さい外力と成る。
【0029】
従って、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を頻繁に繰返して、溶接用ケーブル38に、捻り、曲げ及び引っ張り等の外力が継続して働いても、押え巻きテープ5によって束ねられた導電体4に働く外力は、シース10に働くよりも著しく小さい外力と成る。その結果、多関節ロボット31を連続して長時間運転しても、押え巻きテープ5及び導電体4が摩耗することを大幅に減少することができるので、導電体4が断線したり、導電体4がむき出しに成ることを減少させることができる。そのため、溶接用ケーブル38の交換周期が長く成り、コストや交換の工数を低減することができ、作業効率を向上させることができる。
【0030】
例えば、数十台の多関節ロボット31を同時に稼働させて自動車の部品などを加工する生産ラインにおいて、わずか1台でも多関節ロボット31の溶接用ケーブル38の導電体4が断線したり、むき出しに成ると、溶接用ケーブル38の交換のために生産ライン全体を停止する必要があるために、生産量に悪影響を及ぼす。しかし、溶接用ケーブル38の交換周期が長く成ることで交換頻度が下がるため、コストや交換の工数を低減することができ、作業効率を向上させることができる。さらに、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を行うときに、従来技術の溶接用ケーブル37よりも柔軟に動作させることができる。
【0031】
また、溶接用ケーブル38が周辺治具や被溶接物と干渉して、シース10が破れることがある。作業者がこのことに気付かずに連続運転を繰り返し、シースの破れた部分が周辺治具やワークと干渉を続けると、導電体を断線させることに成る。本発明の溶接用ケーブル38は、導電体4に、押え巻きテープ5と介在テープ6との2種類のテープを巻いているので、シース10が破れた場合でも、導電体4を従来よりも、より保護することができる。また、シース10として、例えば、ハイパロンシース(商品名)を使用すると、より、耐久性を向上させることができる。
【0032】
上述した本発明の溶接用ケーブルは、溶接トーチを多関節ロボットのアーム先端に取り付けて、アーク溶接を行うときについて説明したが、本発明の溶接用ケーブルは、作業者が溶接トーチを操作して溶接を行う手動溶接用の溶接トーチに接続する溶接用ケーブルにも適用することができる。
【0033】
また、本発明の溶接用ケーブルは、消耗電極を使用する溶接トーチだけでなく、非消耗電極を使用するTIG溶接トーチにも適用することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の実施の形態を示す溶接用ケーブルの横断面図である。
【図2】本発明の溶接用ケーブルに対する捻りや曲げの外力が押え巻きテープによって1つに束ねられた導電体に働く様子を説明する横断面図及び縦断面図である。
【図3】溶接トーチを多関節ロボットのアーム先端に取り付けアーク溶接を行うときの溶接ロボットの一般的な構成を示す図である。
【図4】従来技術の溶接用ケーブルの横断面図である。
【図5】従来技術の溶接用ケーブルに対する捻りや曲げの外力が押え巻きテープによって1つに束ねられた導電体に働く様子を説明する横断面図及び縦断面図である。
【図6】ロボットの上部アームに溶接用ケーブルを内蔵させた溶接ロボットの構成を示す図である。
【符号の説明】
【0035】
1 溶接ワイヤ
2 コイルライナ
3 ガスホース
4 導電体
5 押え巻きテープ
6 介在テープ
10 シース
11 導電体・紙テープ部
12 外力
13 外力
14 外力
15 外力
22 外力
23 外力
24 外力
25 外力
31 多関節ロボット
32 上部アーム
33 手首部
34 ワイヤ送給機
35 ワイヤリール
36 溶接トーチ
37 溶接用ケーブル
38 溶接用ケーブル
【技術分野】
【0001】
本発明は、溶接トーチに電力を供給するための溶接用ケーブルに関するものである。
【背景技術】
【0002】
従来から溶接の作業効率を向上させるために、溶接ロボットを用いて溶接を自動化することが広く行われている。図3は、溶接トーチを多関節ロボットのアーム先端に取り付けて、アーク溶接を行うときの溶接ロボットの一般的な構成を示す図である。
【0003】
同図において、多関節ロボット31の上部アーム32の先端に、旋回、振り、及び回転の3自由度を持つ手首部33が取り付けられている。ワイヤ送給機34は上部アーム32に固定されていて、ワイヤリール35に巻かれた溶接ワイヤを溶接用ケーブル37を挿通して、溶接トーチ36に供給する。(例えば、特許文献1参照。)。
【0004】
図4は、従来技術の溶接用ケーブル37の横断面図である。同図において、コイルライナ2は、溶接ワイヤ1をガイドする。ガスホース3は、コイルライナ2の外周に設けられて、シールドガスを流す。複数の導電体4は、ガスホース3の外周に設けられて、電力を供給する。
【0005】
押え巻きテープ5を、複数の導電体4を1つに束ねるように巻きつけている。複数の導電体4を固定するために、この紙テープ5を、例えば、3kgf前後の引張荷重で強固に巻きつけている。また、この押え巻きテープ5として、導電体4を絶縁する機能も果たすために、通常、紙テープ(例えば、株式会社奥田製の絶縁紙)を採用している。
【0006】
シース10は、押え巻きテープ5を被覆して導電体4を絶縁している。このシース10は合成ゴムを素材としたものを採用している。この合成ゴムは、紙と吸いつき易い性質が有る。従って、紙を素材とした押え巻きテープ5の周囲に合成ゴムを素材としたシース10を被覆すると、シース10と押え巻きテープ5とが吸いつくために、ほぼ一体と成って動作するように成る。この結果、複数の導電体4と押え巻きテープ5とシース10とは、ほぼ一体と成って動作する。
【0007】
上述したように、溶接用ケーブル37は多重構造であるために、曲げ剛性が高く、曲げ難い。そのために、図3に示した手首部33が旋回、振り及び回転の動作を行うときに、溶接用ケーブル37が柔軟に動作するように、ケーブル長に余裕を持たせて取り付けている。
【0008】
以下、図3及び図4を参照して、動作を説明する。
ワイヤ送給機34によって、ワイヤリール35に巻かれた溶接ワイヤ1が送給されて、溶接用ケーブル37内のコイルライナ2によってガイドされて、溶接トーチ36へ送給される。ガスボンベ(図示を省略)から噴出されたシールドガスが、溶接用ケーブル37内のガスホース3を通って溶接トーチ36に噴出される。溶接用電源装置(図示を省略)から供給された電力が、溶接用ケーブル37内の導電体4によって溶接トーチ36へ供給される。
【0009】
そして、多関節ロボット31の手首部33が旋回、振り及び回転の動作を行っても、溶接用ケーブル37のケーブル長に余裕を持たせているので、溶接用ケーブル37は柔軟に動作することができる。しかし、後述する課題を有する。
【特許文献1】特開2003−230963号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
上述したように、溶接用ケーブル37は、多関節ロボット31の動作に応じて柔軟に動作するように取り付けられている。しかし、作業者が教示するタスクプログラムに従って、多関節ロボット31を連続運転するとき、3自由度を持つ手首部33は、旋回、振り及び回転の動作を頻繁に繰り返すので、溶接用ケーブル37に、捻り、曲げ及び引っ張り等の外力が継続して働く。これらの外力が溶接用ケーブル37に働いたときの動作を図5を参照して説明する
【0011】
図5(A)は、溶接用ケーブル37にねじりの外力が働いたときの動作を説明するための横断面図であって、同図(B)は、溶接用ケーブル37に曲げの外力が働いたときの動作を説明するための縦断面図である。同図において、説明を容易にするために、図4に示した押え巻きテープ5によって1つに束ねられた導電体4を、導電体・紙テープ部11とし、また、溶接ワイヤ1、コイルライナ2及びガスホース3を省略している。
【0012】
図5(A)において、溶接用ケーブル37にねじりの外力12が加わって、シース10がねじられると、上述したように、導電体・紙テープ部11とシース10とは、ほぼ一体と成って動作するために、導電体・紙テープ部11も同様にねじられる。従って、溶接用ケーブル37にねじりの外力12が加わると、導電体・紙テープ部11にも略同等の捻りの外力13が働く。
【0013】
図5(B)において、溶接用ケーブル37に曲げの外力14が加わったときも同様に、導電体・紙テープ部11も曲げられる。従って、溶接用ケーブル37に曲げの外力14が加わると、導電体・紙テープ部11にも略同等の曲げの外力15が働く。
【0014】
従って、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を頻繁に繰返して、溶接用ケーブル37に、捻り、曲げ及び引っ張り等の外力が継続して働くと、押え巻きテープ5によって束ねられた導電体4に、捻り、曲げ及び引っ張り等の外力がほぼそのまま加わることになる。その結果、連続運転を続けるうちに押え巻きテープ5及び導電体4が摩耗し、導電体4が断線したり、導電体がむき出しに成る問題が発生していた。そのため、溶接用ケーブル37の交換周期が短く、コストや交換の工数が掛かり、作業効率が低下している。
【0015】
さらに、近年のロボットには溶接用ケーブル37が周辺治具や溶接対象となるワークと干渉しないように、ロボットの上部アームに溶接用ケーブル37を内蔵させたものも提案されている。図6は、このロボットの構成を示している。同図の溶接用ケーブル37は、上部アーム32に内蔵させているために、図3に示した溶接ロボットよりも溶接用ケーブル37の曲げ半径を小さくして、たるみの持たせ方を小さくせざるを得ないために、ロボットの動作に応じてやや変形しにくい構造となっている。即ち、図3の構成にした場合よりも余分な外力が働くことになるために、溶接用ケーブル37の寿命がさらに短くなる問題を有していた。本発明は曲げや捻りに強く寿命の長い溶接用ケーブルを提供することを目的としている。
【課題を解決するための手段】
【0016】
上記目的を達成するために、第1の発明は、溶接トーチに電力を供給する溶接用ケーブルであって、前記電力を供給する複数の導電体と、この複数の導電体を1つに束ねるように重ねて巻きつけた押え巻きテープと、この押え巻きテープを被覆するシースとを備えた溶接用ケーブルにおいて、
前記溶接用ケーブルに外力が働いたときに前記シースとの間で滑りにくく前記押え巻きテープとの間で滑りやすい摩擦係数を有しこの押え巻きテープの外周面に重ねて巻きつけた介在テープを備えたことを特徴とする溶接用ケーブルである。
【0017】
第2の発明は、第1の発明に記載の押え巻きテープはテトロンテープであり、介在テープは紙テープであることを特徴とする溶接用ケーブルである。
【発明の効果】
【0018】
この結果、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を頻繁に繰返して、溶接用ケーブル38に、捻り、曲げ及び引っ張り等の外力が継続して働いても、押え巻きテープ5によって束ねられた導電体4に働く外力は、シース10に働くよりも著しく小さい外力と成る。従って、多関節ロボット31を連続して長時間運転しても、押え巻きテープ5及び導電体4が摩耗することを大幅に減少することができるので、導電体4が断線したり、導電体4がむき出しに成ることを減少させることができる。そのため、溶接用ケーブル38の交換周期が長く成り、コストや交換の工数を低減することができ、作業効率を向上させることができる。
【0019】
例えば、数十台の多関節ロボット31を同時に稼働させて自動車の部品などを加工する生産ラインにおいて、わずか1台でも多関節ロボット31の溶接用ケーブル38の導電体4が断線したり、むき出しに成ると、溶接用ケーブル38の交換のために生産ライン全体を停止する必要があるために、生産量に悪影響を及ぼす。しかし、溶接用ケーブル38の交換周期が長く成ることで交換頻度が下がるため、コストや交換の工数を低減することができ、作業効率を向上させることができる。さらに、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を行うときに、従来技術の溶接用ケーブル37よりも柔軟に動作させることができる。
【0020】
また、溶接用ケーブル38が周辺治具や被溶接物と干渉して、シース10が破れることがある。作業者がこのことに気付かずに連続運転を繰り返し、シースの破れた部分が周辺治具やワークと干渉を続けると、導電体を断線させることに成る。本発明の溶接用ケーブル38は、導電体4に、押え巻きテープ5と介在テープ6との2種類のテープを巻いているので、シース10が破れた場合でも、導電体4を従来よりも、より保護することができる。
【発明を実施するための最良の形態】
【0021】
発明の実施の形態を実施例に基づき図面を参照して説明する。
図1は本発明の溶接用ケーブルの横断面図である。同図において、押え巻きテープ5の外周面に介在テープ6を重ねて巻きつけている。その他の機能は、図4の従来技術の溶接用ケーブルの同機能に同符号を付して、説明を省略する。
【0022】
発明者らは、溶接用ケーブルにねじりや曲げの外力が働いたときに、その外力が押え巻きテープ5及び導電体4に伝わることを減少させる方法として、押え巻きテープ5の外周面に介在テープ6を重ねて巻きつける。そして、押え巻きテープ5と導電体4とが一体として動作し、また介在テープ6とシース10とが一体として動作し、かつ押え巻きテープ5と介在テープ6との間の摩擦を減少させて、滑りが発生する方法を発明した。そして、この方法を実現するための各テープの素材を選定するために種々の実験を重ねた結果、以下の素材に決定した。
【0023】
押え巻きテープ5は、網目状に織り込まれたテトロンを素材とし、かつ、その片面がゴム引き加工されているテトロンテープとする。(例えば、福岡クロス工業株式会社製のテトロンゴム引テープ(商品名))。このテトロンテープのゴム引き加工された面を、導電体4に接するように重ねて巻きつける。巻きつけるときの引張荷重による巻きつけ強度に加えて、ゴム引き加工面が導電体4との接触によって摩擦が発生することによって、導電体4と押え巻きテープ5とが一体化して動作することができる。
【0024】
また、介在テープ6は、紙テープ(例えば、株式会社奥田製の絶縁紙)とする。この紙テープは、押え巻きテープに使用するテトロンテープとの接触面で滑りが発生し易い。また、この紙テープは、シース10の素材である合成ゴムと吸いつき易い。そのために、介在テープ6として紙テープを使用し、押え巻きテープ5の外周面に重ねて巻き、この介在テープ6をシース10が被覆すると、介在テープ6は、シース10と略一体と成って動作し、介在テープ6と抑え巻きテープとの間で滑りが発生する。
【0025】
本発明の溶接用ケーブルの動作において、溶接トーチ36へ溶接ワイヤ1が送給され、シールドガスが噴出され、電力が供給される動作は、図3及び図4を参照して説明した従来技術の動作と同じであるので説明を省略する。その他の多関節ロボット31の手首部33が旋回、振り及び回転の動作を行うときに、溶接用ケーブル38に外力が働くが、そのときの溶接用ケーブル38の動作を、以下、図2を参照して説明する。
【0026】
図2(A)は、本発明の溶接用ケーブル38にねじりの外力が働いたときの動作を説明するための横断面図であって、同図(B)は、溶接用ケーブル38に曲げの外力が働いたときの動作を説明するための縦断面図である。同図において、説明を容易にするために、図1に示した押え巻きテープ5によって1つに束ねられた導電体4を、導電体・巻きテープ部11とし、溶接ワイヤ1、コイルライナ2及びガスホース3を省略している。
【0027】
図2(A)において、溶接用ケーブル38にねじりの外力22が働いて、シース10がねじられると、上述したように、介在テープ6は、シース10と略一体と成って動作するので、介在テープ6へもねじりの外力12が加わる。このとき、導電体・巻きテープ部11と介在テープ6との間において滑りが発生するので、導電体・巻きテープ部11に働く外力23は、シース10に働く外力22よりも著しく小さい外力となる。
【0028】
図2(B)において、溶接用ケーブル38に曲げの外力25が働いたときも同様に、導電体・巻きテープ部11と介在テープ6との間において滑りが発生するので、導電体・巻きテープ部11に働く外力24は、シース10に働く外力25よりも著しく小さい外力と成る。
【0029】
従って、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を頻繁に繰返して、溶接用ケーブル38に、捻り、曲げ及び引っ張り等の外力が継続して働いても、押え巻きテープ5によって束ねられた導電体4に働く外力は、シース10に働くよりも著しく小さい外力と成る。その結果、多関節ロボット31を連続して長時間運転しても、押え巻きテープ5及び導電体4が摩耗することを大幅に減少することができるので、導電体4が断線したり、導電体4がむき出しに成ることを減少させることができる。そのため、溶接用ケーブル38の交換周期が長く成り、コストや交換の工数を低減することができ、作業効率を向上させることができる。
【0030】
例えば、数十台の多関節ロボット31を同時に稼働させて自動車の部品などを加工する生産ラインにおいて、わずか1台でも多関節ロボット31の溶接用ケーブル38の導電体4が断線したり、むき出しに成ると、溶接用ケーブル38の交換のために生産ライン全体を停止する必要があるために、生産量に悪影響を及ぼす。しかし、溶接用ケーブル38の交換周期が長く成ることで交換頻度が下がるため、コストや交換の工数を低減することができ、作業効率を向上させることができる。さらに、多関節ロボット31の手首部33が、旋回、振り及び回転の動作を行うときに、従来技術の溶接用ケーブル37よりも柔軟に動作させることができる。
【0031】
また、溶接用ケーブル38が周辺治具や被溶接物と干渉して、シース10が破れることがある。作業者がこのことに気付かずに連続運転を繰り返し、シースの破れた部分が周辺治具やワークと干渉を続けると、導電体を断線させることに成る。本発明の溶接用ケーブル38は、導電体4に、押え巻きテープ5と介在テープ6との2種類のテープを巻いているので、シース10が破れた場合でも、導電体4を従来よりも、より保護することができる。また、シース10として、例えば、ハイパロンシース(商品名)を使用すると、より、耐久性を向上させることができる。
【0032】
上述した本発明の溶接用ケーブルは、溶接トーチを多関節ロボットのアーム先端に取り付けて、アーク溶接を行うときについて説明したが、本発明の溶接用ケーブルは、作業者が溶接トーチを操作して溶接を行う手動溶接用の溶接トーチに接続する溶接用ケーブルにも適用することができる。
【0033】
また、本発明の溶接用ケーブルは、消耗電極を使用する溶接トーチだけでなく、非消耗電極を使用するTIG溶接トーチにも適用することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の実施の形態を示す溶接用ケーブルの横断面図である。
【図2】本発明の溶接用ケーブルに対する捻りや曲げの外力が押え巻きテープによって1つに束ねられた導電体に働く様子を説明する横断面図及び縦断面図である。
【図3】溶接トーチを多関節ロボットのアーム先端に取り付けアーク溶接を行うときの溶接ロボットの一般的な構成を示す図である。
【図4】従来技術の溶接用ケーブルの横断面図である。
【図5】従来技術の溶接用ケーブルに対する捻りや曲げの外力が押え巻きテープによって1つに束ねられた導電体に働く様子を説明する横断面図及び縦断面図である。
【図6】ロボットの上部アームに溶接用ケーブルを内蔵させた溶接ロボットの構成を示す図である。
【符号の説明】
【0035】
1 溶接ワイヤ
2 コイルライナ
3 ガスホース
4 導電体
5 押え巻きテープ
6 介在テープ
10 シース
11 導電体・紙テープ部
12 外力
13 外力
14 外力
15 外力
22 外力
23 外力
24 外力
25 外力
31 多関節ロボット
32 上部アーム
33 手首部
34 ワイヤ送給機
35 ワイヤリール
36 溶接トーチ
37 溶接用ケーブル
38 溶接用ケーブル
【特許請求の範囲】
【請求項1】
溶接トーチに電力を供給する溶接用ケーブルであって、前記電力を供給する複数の導電体と、この複数の導電体を1つに束ねるように重ねて巻きつけた押え巻きテープと、この押え巻きテープを被覆するシースとを備えた溶接用ケーブルにおいて、
前記溶接用ケーブルに外力が働いたときに前記シースとの間で滑りにくく前記押え巻きテープとの間で滑りやすい摩擦係数を有しこの押え巻きテープの外周面に重ねて巻きつけた介在テープを備えたことを特徴とする溶接用ケーブル。
【請求項2】
請求項1に記載の押え巻きテープはテトロンテープであり、介在テープは紙テープであることを特徴とする溶接用ケーブル。
【請求項1】
溶接トーチに電力を供給する溶接用ケーブルであって、前記電力を供給する複数の導電体と、この複数の導電体を1つに束ねるように重ねて巻きつけた押え巻きテープと、この押え巻きテープを被覆するシースとを備えた溶接用ケーブルにおいて、
前記溶接用ケーブルに外力が働いたときに前記シースとの間で滑りにくく前記押え巻きテープとの間で滑りやすい摩擦係数を有しこの押え巻きテープの外周面に重ねて巻きつけた介在テープを備えたことを特徴とする溶接用ケーブル。
【請求項2】
請求項1に記載の押え巻きテープはテトロンテープであり、介在テープは紙テープであることを特徴とする溶接用ケーブル。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2006−231367(P2006−231367A)
【公開日】平成18年9月7日(2006.9.7)
【国際特許分類】
【出願番号】特願2005−48731(P2005−48731)
【出願日】平成17年2月24日(2005.2.24)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
【公開日】平成18年9月7日(2006.9.7)
【国際特許分類】
【出願日】平成17年2月24日(2005.2.24)
【出願人】(000000262)株式会社ダイヘン (990)
【Fターム(参考)】
[ Back to top ]