
漏水判定装置、漏水判定方法、圧力波センサ
【課題】漏水音が小さく暗騒音が存在するような場合でも、精度良く漏水の有無を判定することのできる漏水判定方法及び装置を提供する。
【解決手段】水道管に漏水が生じているか否かを判定する漏水判定装置30は、水道管内の水に生じる圧力波に応じて変化する物理量を測定し、物理量に応じた測定信号を出力する圧力波センサ31と、出力された測定信号に基づき漏水の有無を判定するMPU38と、を備える。
【解決手段】水道管に漏水が生じているか否かを判定する漏水判定装置30は、水道管内の水に生じる圧力波に応じて変化する物理量を測定し、物理量に応じた測定信号を出力する圧力波センサ31と、出力された測定信号に基づき漏水の有無を判定するMPU38と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、水道管からの漏水を判定する装置及び方法に関し、特に、漏水により水道管内の水に生じる圧力波を測定し、測定した圧力波の大きさに基づき漏水の有無を判定する装置及び方法に関する。
【背景技術】
【0002】
従来より、水道管からの漏水の有無を調べる際には、漏水の生じている可能性のある箇所の近傍において、水道管より生じる音又は振動を測定し、音又は振動の大小に基づき、漏水の有無を判定していた。(例えば、特許文献1参照)
【特許文献1】特開平11−180692号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
このような検査は比較的に静かな深夜に行われるものの、機械音などの暗騒音の影響がある場合や、漏水音が小さい場合には、漏水の有無の判定精度が低下してしまうという問題がある。
【0004】
本発明は、上記の問題に鑑みなされたものであり、その目的は、漏水音が小さく暗騒音が存在するような場合でも、精度良く漏水の有無を判定することのできる漏水判定方法及び装置を提供することである。
【課題を解決するための手段】
【0005】
本発明の漏水判定装置は、水道管に漏水が生じているか否かを判定する装置であって、前記水道管内の水に生じる圧力波に応じて変化する物理量を測定し、前記物理量に応じた測定信号を出力する測定手段と、前記出力された測定信号に基づき漏水の有無を判定する判定手段と、を備えることを特徴とする。
【0006】
上記の漏水判定装置において前記測定手段は、前記水道管の外周に周方向に延びるように取り付けられ、前記水道管の周長の変化に応じた測定信号を出力する歪センサからなるものであってもよい。
【0007】
また、前記測定手段は、前記水道管に互いに対向するように取り付けられ、前記水道管に生じる振動に応じた加速度信号を出力する一対の加速度センサと、前記加速度センサより出力された加速度信号を加算して、測定信号を出力する加算手段とからなるものであってもよい。
【0008】
また、本発明の漏水判定方法は、水道管に漏水が生じているか否かを判定する方法であって、前記水道管内の水に生じる圧力波に応じて変化する物理量を測定し、前記測定された物理量に基づき漏水の有無を判定することを特徴とする。
【0009】
また、本発明の圧力波センサは水道管に取り付けられ、水道管内の水に生じる圧力波に応じた測定信号を出力する圧力波センサであって、前記水道管の外周に周方向に延びるように取り付けられ、前記水道管の外周の長さの変化に応じた測定信号を出力する歪センサからなることを特徴とする。
【0010】
また、本発明の圧力波センサは、水道管に取り付けられ、水道管内の水に生じる圧力波に応じた測定信号を出力する圧力波センサであって、前記水道管に互いに対向するように取り付けられ、前記水道管に生じる振動に応じた加速度信号を出力する一対の加速度センサと、前記一対の加速度センサより出力された加速度信号を加算して、測定信号を出力する加算手段とからなることを特徴とする。
【発明の効果】
【0011】
本発明によれば、暗騒音の影響を受けにくい、水道管内の水を伝播する圧力波に基づき、漏水の有無の判定を行っているため、漏水音が小さく暗騒音が存在するような場合でも、精度良く漏水の有無を判定することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の一実施形態について図面を参照しながら説明する。
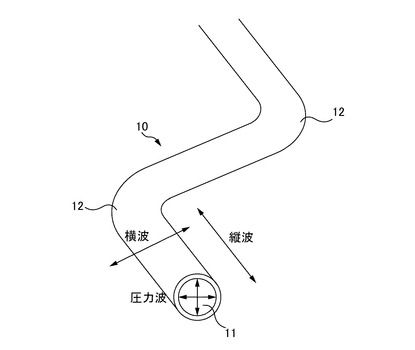
図1は、水道管10に発生する振動を説明するための図である。同図に示すように、水道管に発生する振動には、水道管10の軸方向に振動する縦波と、水道管10の軸方向と垂直方向に振動する横波と、水道管10内の水11を伝播する圧力の変化である圧力波とがある。水道管10に漏水が発生すると、縦波、横波、及び圧力波を含んだ振動が水道管10及び内部の水11を伝播する。
【0013】
ここで、水道管10が屈曲部12を備える場合には、この屈曲部12において水道管10を伝播する振動の縦波及び横波の成分は減衰する。これに対して、圧力波は水道管10内の水11を伝播する圧力の変化であるため、屈曲部12がある場合でも縦波及び横波に比べて減衰が少ない。このため、圧力波は縦波及び横波に比べて遠方まで伝播する。
【0014】
また、外部より水道管10に加わる暗騒音は、水道管10の位置を変えるが管の径を変えるものではない。すなわち、暗騒音により水道管10に生じる振動は縦波及び横波のみであり暗騒音によっては圧力波は生じない。したがって、漏水により発生した振動のうち縦波及び横波の成分は暗騒音の影響を受け易いが、圧力波の成分は暗騒音の影響を受けにくい。
【0015】
従来技術の欄に記載したように、従来は、水道管10の漏水の有無の判定を、水道管10及び内部の水を伝播した振動を加速度センサを用いて測定し、測定された振動の大きさが所定の値を超えたか否かに基づき行っていた。しかしながら、その場合、加速度センサにより測定されるのは、縦波、横波、及び圧力波を含む振動である。このため、漏水の発生位置が遠方にあるような場合や、水道管10が屈曲部を多数有する場合や、周囲の暗騒音が大きい場合には、判定の精度が低下するという問題がある。
【0016】
これに対して、発明者らは、上記のように暗騒音の影響を受けにくい圧力波を測定し、この圧力波の大きさに基づき漏水の有無を判定することにより、判定の精度を向上できると考えた。そこで、発明者らは、水道管10に発生する圧力波を測定する方法として、以下に説明する水道管10の外周の長さの変化を測定する方法を提案する。
【0017】
まず、水道管10の表面の一点における変位に応じた物理量を測定する場合に比べて、水道管10の外周の長さを測定することにより圧力波を感度よく測定できる原理を説明する。
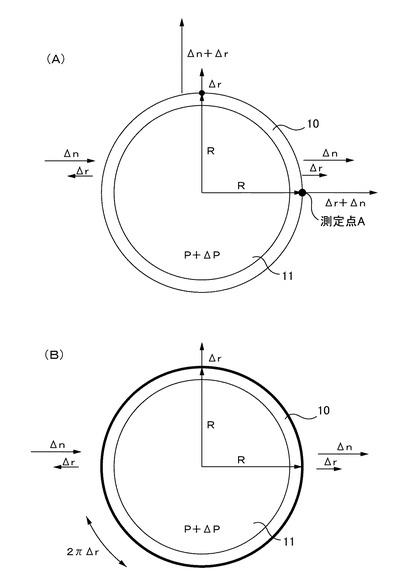
図2は、上記の原理を説明するための図であり、(A)は水道管10の一点において変化を測定する場合、(B)は水道管10の外周の長さの変化を測定する場合を示す。同図(A)、(B)では、水道管10内の水11の圧力Pが圧力波によりΔPだけ上昇し、これにより水道管10の径がΔrだけ増加し、同時に、暗騒音により水道管10に振動が加わり、これにより水道管10がΔnだけ移動したとしている。
【0018】
同図(A)に示すように、水道管10の表面の一点において測定される変位は圧力変化ΔPに対して、(Δr+Δn)となる。これに対して、同図(B)に示すように、水道管10の外周長さは2πΔr増加する。この時、暗騒音の影響により水道管10がΔn移動しても、外部より伝達する振動は内部圧力に影響を及ぼさないため、水道管10の外周長さに影響を及ぼすことはない。このため、測定される外周長さの変化量は圧力変化ΔPに対して2πΔrとなる。
【0019】
このように同じ圧力変化ΔPが生じた時、水道管10の外周の長さの変化は、水道管10の一点における変化の2π倍となる。したがって、本実施形態のように水道管10の外周長さの変化を測定する方法によれば、水道管10の一点における変位を測定する場合に比べて、2π倍の感度が得られることになる。また、上述のように、外周長さの変化は暗騒音の影響をほとんど受けない。したがって、水道管の外周長さの変化を測定することで、圧力波を精度良く検知することができる。
【0020】
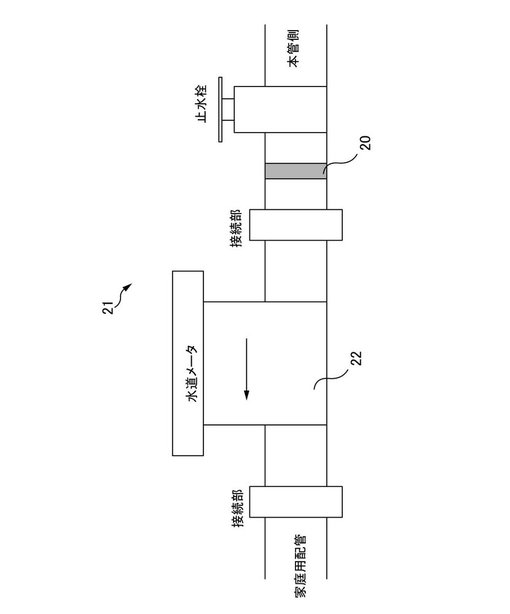
ここで、発明者らは、このように水道管10の外周長さの変化を測定することにより、水道管10の表面の一点における変位を測定した場合に比べて漏水により生ずる振動を精度良く測定できることを確認するため、実験を行ったので以下説明する。
本実験では、図3に示すように水道管の本管と各家庭の配管とを結ぶ分岐管21の水道メータ22の近傍に歪センサ20を外周に巻きつけた場合と、及び歪センサ20と同じ位置に加速度センサ(不図示)を取付けた場合とについて、分岐管21の一部に漏水を模した振動を加えて、歪センサ20及び加速度センサで測定された振動を比較した。なお、漏水を模した振動は、家庭内側の蛇口(不図示)をわずかに開くことによりを発生させた。
【0021】
その結果、歪センサ20及び加速度センサで測定された測定信号を比較すると、歪センサ20により得られた測定信号は、加速度センサにより得られた測定信号に比べてS/N比が高い結果となった。このように、歪センサ20を用いることにより、漏水により生ずる振動を精度良く測定できることが確認された。
【0022】
また、発明者らは、別途行った実験により、漏水が発生している水道管の振動はスペクトルに再現性があり、かつ、4.5〜6.5[kHz]以下の周波数帯域における振動レベルが漏水が発生していない場合に比べて高いことを確認している。このため、振動レベルが高く、かつ、水道管10に取付けられた圧力波センサにより互いに異なる複数の時期に検出された測定信号を周波数分析することにより得られたスペクトルが一致する場合には、漏水が発生している可能性があると判定することができる。
【0023】
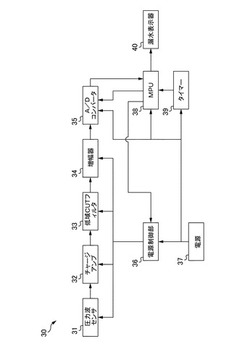
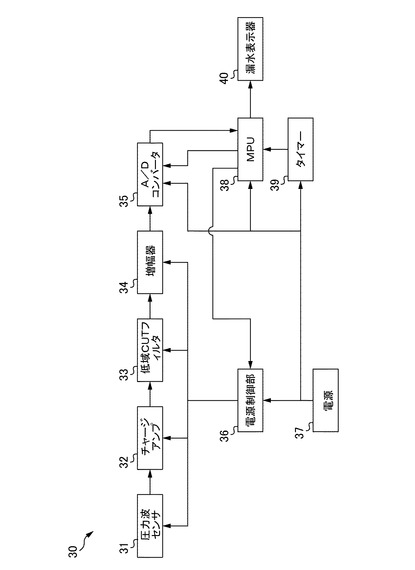
以上を踏まえて、本実施形態の漏水判定装置は以下のような構成とした。図4は、本実施形態の漏水判定装置30の構成を示す図である。同図に示すように、漏水判定装置30は、圧力波センサ31と、チャージアンプ32と、低域CUTフィルタ33と、増幅器34と、A/Dコンバータ35と、電源制御部36と、電源37と、MPU38と、タイマー39と、漏水表示器40と、を備える。
【0024】
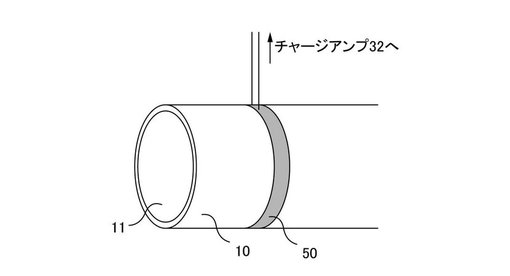
図5は、圧力波センサ31の構成を示す図である。同図に示すように、圧力度センサ31は、水道管の外周に周方向に延びるように貼り付けられたピエゾフィルム50からなる。ピエゾフィルム50は、長さ方向に歪を生じると、その歪の大きさに応じた電荷信号を出力する。上述したように、水道管10内の水を伝播する圧力波による圧力変化に応じて水道管10の外周長さが変化するから、ピエゾフィルム50は圧力波に応じた電荷信号を出力する。
【0025】
チャージアンプ32は、圧力波センサ31から出力された電荷信号を電圧信号に変換する。これによりチャージアンプ32から出力される信号は、圧力波に応じた電圧信号となる。
低域CUTフィルタ33は、チャージアンプ32より出力された測定信号の、例えば、500[Hz]以下の低域成分を除去する。これにより、主に暗騒音が原因である500[Hz]以下の周波数成分を除去し、漏水により生じる振動の周波数成分を抽出することができる。
【0026】
増幅器34は、低域CUTフィルタ33より出力されたフィルタ処理済みの測定信号を増幅処理する。
A/Dコンバータ35は、MPU38よりサンプリング周波数及び測定時間長さ(あるいは、測定サンプル数)の指定を含む測定信号要求信号を受信すると、増幅器34により増幅処理された測定信号の指定された測定時間長さ(あるいは測定サンプル数)について、指定されたサンプリング周波数によりA/D変換し、A/D変換された測定信号をMPU38に送信する。このようにして、MPU38には、1日の間の異なる複数の時期に、圧力波センサ31により測定された加速度信号を示すデジタル信号が入力される。
【0027】
タイマー39には、複数の起動時刻及び一日の起動回数が設定されており、起動時刻になると、MPU38に起動指令信号を送信する。起動時刻としては、例えば、5分間おきなど一定の間隔で起動するように設定されている。
MPU38は、タイマー39より起動指令信号の入力を受付けると、電源制御部36に電源制御信号を送信する。
【0028】
電源制御部36には、リチウム電池などからなる電源37が接続されており、MPU38から電源制御信号を受信すると、圧力波センサ31、チャージアンプ32、低域CUTフィルタ33、及び増幅器34に電力を供給する。
【0029】
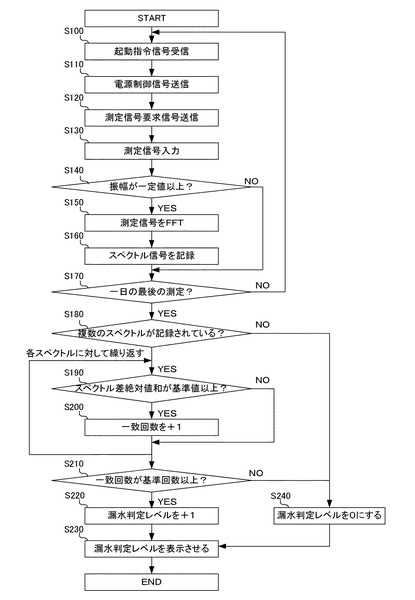
次に、図5に示すフローチャートを参照してMPU38が実行する処理を説明する。なお、図5は、MPU38が毎日実行する処理の流れを示している。
MPU38は、ステップ100においてタイマー39より起動指令信号を受信すると、ステップ110において、電源制御部36に電源制御信号を送信する。上述の通り、電源制御部36は、MPU38から電源制御信号を受信すると、圧力波センサ31、チャージアンプ32、低域CUTフィルタ33、及び増幅器34に電力を供給する。
【0030】
次に、MPU38は、ステップ120において、A/Dコンバータ35に測定信号要求信号を送信する。A/Dコンバータ35は、測定信号要求信号を受信すると、測定信号要求信号により指定されたサンプリング周波数でA/D変換した、指定された測定時間長さ(あるいは測定サンプル数)の測定信号をMPU38に送信する。
【0031】
次に、MPU38は、ステップ130において、A/D変換された測定信号の入力を受付け、ステップ140において、入力された測定信号のレベルが所定の値以上であるか否かを判定する。入力された測定信号のレベルが所定の値以上である場合には(ステップ140でYES)、暗騒音が大きいか、あるいは漏水が発生していると判定できる。そこで、ステップ150において測定信号をFFTして、スペクトルを算出する。なお、本実施形態ではステップ140における信号レベルの判定は、信号のパワーに基づいて行ってもよいし、振幅の最大値や実効値に基づいて行ってもよい。
【0032】
次に、ステップ160において、MPU38は算出されたスペクトルを記録する。
MPU38は、ステップ160におけるスペクトルの記録回数をカウントしており、ステップ170において、この記録回数が予め設定された回数に達したか否かに基づいて今回記録したスペクトルが今日の最後の測定信号のスペクトルであるか否かを判定する。この記録したスペクトルが一日の最後の測定信号のスペクトルである場合(ステップ170でYES)には、後述するステップ180以降の処理を行う。また、一日の最後の測定信号のスペクトルではない場合(ステップ170でNO)には、再び、ステップ100でタイマー39より起動指令信号を受信するまで待機する。
【0033】
ステップ170でYES判定された場合は、1日分の測定を終了したことになる。この場合、複数のスペクトルが記録されていれば(つまり、複数の測定信号が一定値以上の振幅を有していれば)(ステップ180でYES)、何れか一つのスペクトルを基準スペクトルP0(f)とし、その他の各スペクトルP(f)について、次式(1)で表される複数の所定の周波数f1、…、fnにおける基準スペクトルP0(f)とその他の各スペクトルP(f)の差の絶対値の合計(以下、スペクトル差絶対値和という)を算出する。
【数1】

【0034】
MPU38には、予め設定されたスペクトル差絶対値和の判定基準となる基準値が記録されている。MPU38は、ステップ190において、上記の式(1)により算出されたスペクトル差絶対値和と基準値とを比較する。その結果、スペクトル差絶対値和が基準値未満である場合には、P0(f)とP(f)とが一致すると判定し、ステップ200において一致回数を1だけ増加させる。また、スペクトル差絶対値和が基準値以上である場合には、P0(f)とP(f)とは一致していないと判定する。このように、ステップ190及びステップ200を基準スペクトル以外の全てのスペクトルに対して行うことで、一日の測定で得られたスペクトルの一致回数Cを求めることができる。
【0035】
また、MPU38には、漏水の疑いの有無を判定する基準となる一致回数の基準値(以下、基準回数C0という)が記録されている。MPU38は、ステップ210において、一致回数Cと基準回数C0とを比較する。その結果、一致回数Cが、基準回数C0以上となる場合には、(ステップ210でYES)、漏水の虞があるため、ステップ220において漏水判定レベルを1だけ増加させる。
【0036】
一方、ステップ180において複数のスペクトルが記録されていない場合(ステップ180でNO)、及び、ステップ210で一致回数Cが、基準回数未満C0の場合(ステップ210でNO)には、ステップ240で漏水判定レベルを0に引き下げる。なお、これに限らず、漏水判定レベルを1/2にするなどにより引き下げてもよい。
このように、周波数特性に基づき漏水の有無を判定するため、暗騒音が大きい場合や、漏水音が小さい場合でも、精度良く判定を行うことができる。
【0037】
次に、ステップ230において、漏水表示器40により、例えば、上記算出した漏水判定レベルが3〜5の場合には黄色の表示を、漏水判定レベルが6以上の場合には赤色の表示を行わせる。検査員は定期的にこの漏水表示器40の表示を調べ、漏水判定レベルが高い場合には、その近傍で漏水が発生している可能性が高いと判断し、近傍の水道管について詳細な漏水の有無の調査を行う。これにより、確実に水道管における漏水の発生を発見することができる。
【0038】
以上説明したように、本実施形態の漏水判定装置によれば、水道管10に巻きつけたピエゾフィルム50により水道管10の外周の長さの変化を測定することにより、漏水により発生し、水道管10内の水を伝播した圧力波に応じた測定信号を取得することができる。圧力波は暗騒音の影響を受けにくく、また、図1を参照して説明したように、水道管10の屈曲部12における減衰が少ないため、暗騒音がある場合や漏水音が小さい場合でも精度良く漏水の有無を判定できる。また、ピエゾフィルム50は加速度センサに比べて低価格であるため、漏水判定装置30を廉価で提供することができる。
【0039】
なお、本実施形態では、ピエゾフィルム50により水道管10内を伝播する圧力波を測定するものとしたが、これに限らず、歪ゲージなどを用いることができ、要するに水道管の外周の長さの変化に応じた信号を出力するものであればよい。
【0040】
また、本実施形態では、測定信号のレベルが所定の値以上となり、かつ、基準スペクトルと他のスペクトルとが一致する場合に、漏水有りと判定するものとしたが、これに限らず、従来と同様に、振幅の最大値や実効値やレベルが所定の値以上となった場合について、漏水有りと判定してもよい。
【0041】
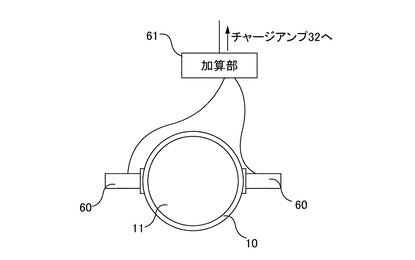
また、本実施形態では、圧力波センサ31としてピエゾフィルム50を用いているが、これに限らず、例えば、図7に示すように、水道管に対向する向きに取付けられ、加速度に応じた加速度信号を出力する一対の加速度センサ60と、各加速度センサ60において出力された加速度信号を加算する加算部61とで圧力波センサ31を構成してもよい。
【0042】
以下、図7に示すように、水道管に対向する向きに一対の加速度センサを取付け、この一対の加速度センサにより測定された加速度を加算する方法により感度が向上する原理について説明する。
【0043】
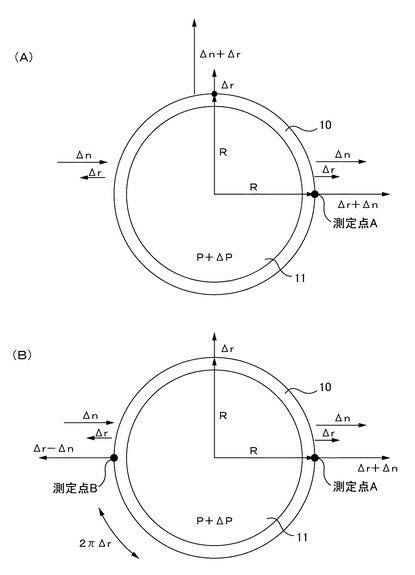
図8は、上記の原理を説明するための図であり、(A)は水道管10の外周の一箇所で変位を測定する場合を示し、(B)は水道管10の外周の対向する位置に設定された一対の測定点A及びBで変位を測定する場合を示す。
【0044】
同図(A)、(B)では、水道管10内の水11の圧力Pが圧力波によりΔPだけ上昇し、これにより水道管の径がΔrだけ増加し、同時に、暗騒音により水道管10に振動が加わり、これにより水道管10がΔnだけ移動したとしている。この時、同図(A)に示すように、水道管10の表面の一点において測定される変位は(Δr+Δn)となる。これに対して、同図(B)に示すように、図中右側の測定点Aで測定される変位は、(Δr+Δn)であり、図中左側の測定点Bで測定される変位は(Δr−Δn)である。このため、測定点A及び測定点Bにおいて測定された変位の和は2Δrとなり、暗騒音の影響を除去することができる。また、測定点A及びBに当たる位置に加速度センサを取付けると、加速度センサはその測定方向に対して垂直方向の振動は測定しないため、水道管の軸方向(すなわち、図面に対して垂直方向)の縦波が発生したとしても加速度センサで測定される変位はその影響を受けることがない。このように、一対の加速度センサを対向するように取付けることにより縦波及び横波の影響を受けることなく圧力波を測定することができる。
【0045】
このため、図7に示すように、水道管10に対向するように取付けられた一対の加速度センサ60と、加速度センサより出力された加速度信号を加算する加算部61とにより圧力波センサを構成した場合にも、圧力波の変化に応じた測定信号を取得することができ、上述した第1の実施形態と同様の効果が得られる。
【図面の簡単な説明】
【0046】
【図1】水道管に発生する波を説明するための図である。
【図2】圧力波を感度良く測定できる原理を説明するための図であり、(A)は水道管の一点において変位を測定する場合、(B)は水道管の外周の長さの変位を測定する場合を示す。
【図3】歪センサを取り付けた分岐管を示す図である。
【図4】本実施形態の漏水判定装置の構成を示す図である。
【図5】圧力波センサの構成を示す図である。
【図6】漏水判定装置により漏水の有無を判定する流れを説明するためのフローチャートである。
【図7】水道管に対向するように取り付けられた一対の加速度センサからなる圧力波センサの構成を示す図である。
【図8】圧力波を感度良く測定できる原理を説明するための図であり、(A)は水道管の外周の一箇所で変位を測定する場合を示し、(B)は水道管の外周の対向する位置に設定された一対の測定点で変位を測定する場合を示す。
【符号の説明】
【0047】
10 水道管 11 水 12 屈曲部
20 漏水表示器 21 分岐管 22 メータ
30 漏水判定装置 31 圧力波センサ 32 チャージアンプ
33 低域CUTフィルタ 34 増幅器 35 A/Dコンバータ
36 電源制御部 37 電源 38 MPU
39 タイマー 40 漏水表示部 50 ピエゾフィルム
60 加速度センサ 61 加算部
【技術分野】
【0001】
本発明は、水道管からの漏水を判定する装置及び方法に関し、特に、漏水により水道管内の水に生じる圧力波を測定し、測定した圧力波の大きさに基づき漏水の有無を判定する装置及び方法に関する。
【背景技術】
【0002】
従来より、水道管からの漏水の有無を調べる際には、漏水の生じている可能性のある箇所の近傍において、水道管より生じる音又は振動を測定し、音又は振動の大小に基づき、漏水の有無を判定していた。(例えば、特許文献1参照)
【特許文献1】特開平11−180692号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
このような検査は比較的に静かな深夜に行われるものの、機械音などの暗騒音の影響がある場合や、漏水音が小さい場合には、漏水の有無の判定精度が低下してしまうという問題がある。
【0004】
本発明は、上記の問題に鑑みなされたものであり、その目的は、漏水音が小さく暗騒音が存在するような場合でも、精度良く漏水の有無を判定することのできる漏水判定方法及び装置を提供することである。
【課題を解決するための手段】
【0005】
本発明の漏水判定装置は、水道管に漏水が生じているか否かを判定する装置であって、前記水道管内の水に生じる圧力波に応じて変化する物理量を測定し、前記物理量に応じた測定信号を出力する測定手段と、前記出力された測定信号に基づき漏水の有無を判定する判定手段と、を備えることを特徴とする。
【0006】
上記の漏水判定装置において前記測定手段は、前記水道管の外周に周方向に延びるように取り付けられ、前記水道管の周長の変化に応じた測定信号を出力する歪センサからなるものであってもよい。
【0007】
また、前記測定手段は、前記水道管に互いに対向するように取り付けられ、前記水道管に生じる振動に応じた加速度信号を出力する一対の加速度センサと、前記加速度センサより出力された加速度信号を加算して、測定信号を出力する加算手段とからなるものであってもよい。
【0008】
また、本発明の漏水判定方法は、水道管に漏水が生じているか否かを判定する方法であって、前記水道管内の水に生じる圧力波に応じて変化する物理量を測定し、前記測定された物理量に基づき漏水の有無を判定することを特徴とする。
【0009】
また、本発明の圧力波センサは水道管に取り付けられ、水道管内の水に生じる圧力波に応じた測定信号を出力する圧力波センサであって、前記水道管の外周に周方向に延びるように取り付けられ、前記水道管の外周の長さの変化に応じた測定信号を出力する歪センサからなることを特徴とする。
【0010】
また、本発明の圧力波センサは、水道管に取り付けられ、水道管内の水に生じる圧力波に応じた測定信号を出力する圧力波センサであって、前記水道管に互いに対向するように取り付けられ、前記水道管に生じる振動に応じた加速度信号を出力する一対の加速度センサと、前記一対の加速度センサより出力された加速度信号を加算して、測定信号を出力する加算手段とからなることを特徴とする。
【発明の効果】
【0011】
本発明によれば、暗騒音の影響を受けにくい、水道管内の水を伝播する圧力波に基づき、漏水の有無の判定を行っているため、漏水音が小さく暗騒音が存在するような場合でも、精度良く漏水の有無を判定することができる。
【発明を実施するための最良の形態】
【0012】
以下、本発明の一実施形態について図面を参照しながら説明する。
図1は、水道管10に発生する振動を説明するための図である。同図に示すように、水道管に発生する振動には、水道管10の軸方向に振動する縦波と、水道管10の軸方向と垂直方向に振動する横波と、水道管10内の水11を伝播する圧力の変化である圧力波とがある。水道管10に漏水が発生すると、縦波、横波、及び圧力波を含んだ振動が水道管10及び内部の水11を伝播する。
【0013】
ここで、水道管10が屈曲部12を備える場合には、この屈曲部12において水道管10を伝播する振動の縦波及び横波の成分は減衰する。これに対して、圧力波は水道管10内の水11を伝播する圧力の変化であるため、屈曲部12がある場合でも縦波及び横波に比べて減衰が少ない。このため、圧力波は縦波及び横波に比べて遠方まで伝播する。
【0014】
また、外部より水道管10に加わる暗騒音は、水道管10の位置を変えるが管の径を変えるものではない。すなわち、暗騒音により水道管10に生じる振動は縦波及び横波のみであり暗騒音によっては圧力波は生じない。したがって、漏水により発生した振動のうち縦波及び横波の成分は暗騒音の影響を受け易いが、圧力波の成分は暗騒音の影響を受けにくい。
【0015】
従来技術の欄に記載したように、従来は、水道管10の漏水の有無の判定を、水道管10及び内部の水を伝播した振動を加速度センサを用いて測定し、測定された振動の大きさが所定の値を超えたか否かに基づき行っていた。しかしながら、その場合、加速度センサにより測定されるのは、縦波、横波、及び圧力波を含む振動である。このため、漏水の発生位置が遠方にあるような場合や、水道管10が屈曲部を多数有する場合や、周囲の暗騒音が大きい場合には、判定の精度が低下するという問題がある。
【0016】
これに対して、発明者らは、上記のように暗騒音の影響を受けにくい圧力波を測定し、この圧力波の大きさに基づき漏水の有無を判定することにより、判定の精度を向上できると考えた。そこで、発明者らは、水道管10に発生する圧力波を測定する方法として、以下に説明する水道管10の外周の長さの変化を測定する方法を提案する。
【0017】
まず、水道管10の表面の一点における変位に応じた物理量を測定する場合に比べて、水道管10の外周の長さを測定することにより圧力波を感度よく測定できる原理を説明する。
図2は、上記の原理を説明するための図であり、(A)は水道管10の一点において変化を測定する場合、(B)は水道管10の外周の長さの変化を測定する場合を示す。同図(A)、(B)では、水道管10内の水11の圧力Pが圧力波によりΔPだけ上昇し、これにより水道管10の径がΔrだけ増加し、同時に、暗騒音により水道管10に振動が加わり、これにより水道管10がΔnだけ移動したとしている。
【0018】
同図(A)に示すように、水道管10の表面の一点において測定される変位は圧力変化ΔPに対して、(Δr+Δn)となる。これに対して、同図(B)に示すように、水道管10の外周長さは2πΔr増加する。この時、暗騒音の影響により水道管10がΔn移動しても、外部より伝達する振動は内部圧力に影響を及ぼさないため、水道管10の外周長さに影響を及ぼすことはない。このため、測定される外周長さの変化量は圧力変化ΔPに対して2πΔrとなる。
【0019】
このように同じ圧力変化ΔPが生じた時、水道管10の外周の長さの変化は、水道管10の一点における変化の2π倍となる。したがって、本実施形態のように水道管10の外周長さの変化を測定する方法によれば、水道管10の一点における変位を測定する場合に比べて、2π倍の感度が得られることになる。また、上述のように、外周長さの変化は暗騒音の影響をほとんど受けない。したがって、水道管の外周長さの変化を測定することで、圧力波を精度良く検知することができる。
【0020】
ここで、発明者らは、このように水道管10の外周長さの変化を測定することにより、水道管10の表面の一点における変位を測定した場合に比べて漏水により生ずる振動を精度良く測定できることを確認するため、実験を行ったので以下説明する。
本実験では、図3に示すように水道管の本管と各家庭の配管とを結ぶ分岐管21の水道メータ22の近傍に歪センサ20を外周に巻きつけた場合と、及び歪センサ20と同じ位置に加速度センサ(不図示)を取付けた場合とについて、分岐管21の一部に漏水を模した振動を加えて、歪センサ20及び加速度センサで測定された振動を比較した。なお、漏水を模した振動は、家庭内側の蛇口(不図示)をわずかに開くことによりを発生させた。
【0021】
その結果、歪センサ20及び加速度センサで測定された測定信号を比較すると、歪センサ20により得られた測定信号は、加速度センサにより得られた測定信号に比べてS/N比が高い結果となった。このように、歪センサ20を用いることにより、漏水により生ずる振動を精度良く測定できることが確認された。
【0022】
また、発明者らは、別途行った実験により、漏水が発生している水道管の振動はスペクトルに再現性があり、かつ、4.5〜6.5[kHz]以下の周波数帯域における振動レベルが漏水が発生していない場合に比べて高いことを確認している。このため、振動レベルが高く、かつ、水道管10に取付けられた圧力波センサにより互いに異なる複数の時期に検出された測定信号を周波数分析することにより得られたスペクトルが一致する場合には、漏水が発生している可能性があると判定することができる。
【0023】
以上を踏まえて、本実施形態の漏水判定装置は以下のような構成とした。図4は、本実施形態の漏水判定装置30の構成を示す図である。同図に示すように、漏水判定装置30は、圧力波センサ31と、チャージアンプ32と、低域CUTフィルタ33と、増幅器34と、A/Dコンバータ35と、電源制御部36と、電源37と、MPU38と、タイマー39と、漏水表示器40と、を備える。
【0024】
図5は、圧力波センサ31の構成を示す図である。同図に示すように、圧力度センサ31は、水道管の外周に周方向に延びるように貼り付けられたピエゾフィルム50からなる。ピエゾフィルム50は、長さ方向に歪を生じると、その歪の大きさに応じた電荷信号を出力する。上述したように、水道管10内の水を伝播する圧力波による圧力変化に応じて水道管10の外周長さが変化するから、ピエゾフィルム50は圧力波に応じた電荷信号を出力する。
【0025】
チャージアンプ32は、圧力波センサ31から出力された電荷信号を電圧信号に変換する。これによりチャージアンプ32から出力される信号は、圧力波に応じた電圧信号となる。
低域CUTフィルタ33は、チャージアンプ32より出力された測定信号の、例えば、500[Hz]以下の低域成分を除去する。これにより、主に暗騒音が原因である500[Hz]以下の周波数成分を除去し、漏水により生じる振動の周波数成分を抽出することができる。
【0026】
増幅器34は、低域CUTフィルタ33より出力されたフィルタ処理済みの測定信号を増幅処理する。
A/Dコンバータ35は、MPU38よりサンプリング周波数及び測定時間長さ(あるいは、測定サンプル数)の指定を含む測定信号要求信号を受信すると、増幅器34により増幅処理された測定信号の指定された測定時間長さ(あるいは測定サンプル数)について、指定されたサンプリング周波数によりA/D変換し、A/D変換された測定信号をMPU38に送信する。このようにして、MPU38には、1日の間の異なる複数の時期に、圧力波センサ31により測定された加速度信号を示すデジタル信号が入力される。
【0027】
タイマー39には、複数の起動時刻及び一日の起動回数が設定されており、起動時刻になると、MPU38に起動指令信号を送信する。起動時刻としては、例えば、5分間おきなど一定の間隔で起動するように設定されている。
MPU38は、タイマー39より起動指令信号の入力を受付けると、電源制御部36に電源制御信号を送信する。
【0028】
電源制御部36には、リチウム電池などからなる電源37が接続されており、MPU38から電源制御信号を受信すると、圧力波センサ31、チャージアンプ32、低域CUTフィルタ33、及び増幅器34に電力を供給する。
【0029】
次に、図5に示すフローチャートを参照してMPU38が実行する処理を説明する。なお、図5は、MPU38が毎日実行する処理の流れを示している。
MPU38は、ステップ100においてタイマー39より起動指令信号を受信すると、ステップ110において、電源制御部36に電源制御信号を送信する。上述の通り、電源制御部36は、MPU38から電源制御信号を受信すると、圧力波センサ31、チャージアンプ32、低域CUTフィルタ33、及び増幅器34に電力を供給する。
【0030】
次に、MPU38は、ステップ120において、A/Dコンバータ35に測定信号要求信号を送信する。A/Dコンバータ35は、測定信号要求信号を受信すると、測定信号要求信号により指定されたサンプリング周波数でA/D変換した、指定された測定時間長さ(あるいは測定サンプル数)の測定信号をMPU38に送信する。
【0031】
次に、MPU38は、ステップ130において、A/D変換された測定信号の入力を受付け、ステップ140において、入力された測定信号のレベルが所定の値以上であるか否かを判定する。入力された測定信号のレベルが所定の値以上である場合には(ステップ140でYES)、暗騒音が大きいか、あるいは漏水が発生していると判定できる。そこで、ステップ150において測定信号をFFTして、スペクトルを算出する。なお、本実施形態ではステップ140における信号レベルの判定は、信号のパワーに基づいて行ってもよいし、振幅の最大値や実効値に基づいて行ってもよい。
【0032】
次に、ステップ160において、MPU38は算出されたスペクトルを記録する。
MPU38は、ステップ160におけるスペクトルの記録回数をカウントしており、ステップ170において、この記録回数が予め設定された回数に達したか否かに基づいて今回記録したスペクトルが今日の最後の測定信号のスペクトルであるか否かを判定する。この記録したスペクトルが一日の最後の測定信号のスペクトルである場合(ステップ170でYES)には、後述するステップ180以降の処理を行う。また、一日の最後の測定信号のスペクトルではない場合(ステップ170でNO)には、再び、ステップ100でタイマー39より起動指令信号を受信するまで待機する。
【0033】
ステップ170でYES判定された場合は、1日分の測定を終了したことになる。この場合、複数のスペクトルが記録されていれば(つまり、複数の測定信号が一定値以上の振幅を有していれば)(ステップ180でYES)、何れか一つのスペクトルを基準スペクトルP0(f)とし、その他の各スペクトルP(f)について、次式(1)で表される複数の所定の周波数f1、…、fnにおける基準スペクトルP0(f)とその他の各スペクトルP(f)の差の絶対値の合計(以下、スペクトル差絶対値和という)を算出する。
【数1】
【0034】
MPU38には、予め設定されたスペクトル差絶対値和の判定基準となる基準値が記録されている。MPU38は、ステップ190において、上記の式(1)により算出されたスペクトル差絶対値和と基準値とを比較する。その結果、スペクトル差絶対値和が基準値未満である場合には、P0(f)とP(f)とが一致すると判定し、ステップ200において一致回数を1だけ増加させる。また、スペクトル差絶対値和が基準値以上である場合には、P0(f)とP(f)とは一致していないと判定する。このように、ステップ190及びステップ200を基準スペクトル以外の全てのスペクトルに対して行うことで、一日の測定で得られたスペクトルの一致回数Cを求めることができる。
【0035】
また、MPU38には、漏水の疑いの有無を判定する基準となる一致回数の基準値(以下、基準回数C0という)が記録されている。MPU38は、ステップ210において、一致回数Cと基準回数C0とを比較する。その結果、一致回数Cが、基準回数C0以上となる場合には、(ステップ210でYES)、漏水の虞があるため、ステップ220において漏水判定レベルを1だけ増加させる。
【0036】
一方、ステップ180において複数のスペクトルが記録されていない場合(ステップ180でNO)、及び、ステップ210で一致回数Cが、基準回数未満C0の場合(ステップ210でNO)には、ステップ240で漏水判定レベルを0に引き下げる。なお、これに限らず、漏水判定レベルを1/2にするなどにより引き下げてもよい。
このように、周波数特性に基づき漏水の有無を判定するため、暗騒音が大きい場合や、漏水音が小さい場合でも、精度良く判定を行うことができる。
【0037】
次に、ステップ230において、漏水表示器40により、例えば、上記算出した漏水判定レベルが3〜5の場合には黄色の表示を、漏水判定レベルが6以上の場合には赤色の表示を行わせる。検査員は定期的にこの漏水表示器40の表示を調べ、漏水判定レベルが高い場合には、その近傍で漏水が発生している可能性が高いと判断し、近傍の水道管について詳細な漏水の有無の調査を行う。これにより、確実に水道管における漏水の発生を発見することができる。
【0038】
以上説明したように、本実施形態の漏水判定装置によれば、水道管10に巻きつけたピエゾフィルム50により水道管10の外周の長さの変化を測定することにより、漏水により発生し、水道管10内の水を伝播した圧力波に応じた測定信号を取得することができる。圧力波は暗騒音の影響を受けにくく、また、図1を参照して説明したように、水道管10の屈曲部12における減衰が少ないため、暗騒音がある場合や漏水音が小さい場合でも精度良く漏水の有無を判定できる。また、ピエゾフィルム50は加速度センサに比べて低価格であるため、漏水判定装置30を廉価で提供することができる。
【0039】
なお、本実施形態では、ピエゾフィルム50により水道管10内を伝播する圧力波を測定するものとしたが、これに限らず、歪ゲージなどを用いることができ、要するに水道管の外周の長さの変化に応じた信号を出力するものであればよい。
【0040】
また、本実施形態では、測定信号のレベルが所定の値以上となり、かつ、基準スペクトルと他のスペクトルとが一致する場合に、漏水有りと判定するものとしたが、これに限らず、従来と同様に、振幅の最大値や実効値やレベルが所定の値以上となった場合について、漏水有りと判定してもよい。
【0041】
また、本実施形態では、圧力波センサ31としてピエゾフィルム50を用いているが、これに限らず、例えば、図7に示すように、水道管に対向する向きに取付けられ、加速度に応じた加速度信号を出力する一対の加速度センサ60と、各加速度センサ60において出力された加速度信号を加算する加算部61とで圧力波センサ31を構成してもよい。
【0042】
以下、図7に示すように、水道管に対向する向きに一対の加速度センサを取付け、この一対の加速度センサにより測定された加速度を加算する方法により感度が向上する原理について説明する。
【0043】
図8は、上記の原理を説明するための図であり、(A)は水道管10の外周の一箇所で変位を測定する場合を示し、(B)は水道管10の外周の対向する位置に設定された一対の測定点A及びBで変位を測定する場合を示す。
【0044】
同図(A)、(B)では、水道管10内の水11の圧力Pが圧力波によりΔPだけ上昇し、これにより水道管の径がΔrだけ増加し、同時に、暗騒音により水道管10に振動が加わり、これにより水道管10がΔnだけ移動したとしている。この時、同図(A)に示すように、水道管10の表面の一点において測定される変位は(Δr+Δn)となる。これに対して、同図(B)に示すように、図中右側の測定点Aで測定される変位は、(Δr+Δn)であり、図中左側の測定点Bで測定される変位は(Δr−Δn)である。このため、測定点A及び測定点Bにおいて測定された変位の和は2Δrとなり、暗騒音の影響を除去することができる。また、測定点A及びBに当たる位置に加速度センサを取付けると、加速度センサはその測定方向に対して垂直方向の振動は測定しないため、水道管の軸方向(すなわち、図面に対して垂直方向)の縦波が発生したとしても加速度センサで測定される変位はその影響を受けることがない。このように、一対の加速度センサを対向するように取付けることにより縦波及び横波の影響を受けることなく圧力波を測定することができる。
【0045】
このため、図7に示すように、水道管10に対向するように取付けられた一対の加速度センサ60と、加速度センサより出力された加速度信号を加算する加算部61とにより圧力波センサを構成した場合にも、圧力波の変化に応じた測定信号を取得することができ、上述した第1の実施形態と同様の効果が得られる。
【図面の簡単な説明】
【0046】
【図1】水道管に発生する波を説明するための図である。
【図2】圧力波を感度良く測定できる原理を説明するための図であり、(A)は水道管の一点において変位を測定する場合、(B)は水道管の外周の長さの変位を測定する場合を示す。
【図3】歪センサを取り付けた分岐管を示す図である。
【図4】本実施形態の漏水判定装置の構成を示す図である。
【図5】圧力波センサの構成を示す図である。
【図6】漏水判定装置により漏水の有無を判定する流れを説明するためのフローチャートである。
【図7】水道管に対向するように取り付けられた一対の加速度センサからなる圧力波センサの構成を示す図である。
【図8】圧力波を感度良く測定できる原理を説明するための図であり、(A)は水道管の外周の一箇所で変位を測定する場合を示し、(B)は水道管の外周の対向する位置に設定された一対の測定点で変位を測定する場合を示す。
【符号の説明】
【0047】
10 水道管 11 水 12 屈曲部
20 漏水表示器 21 分岐管 22 メータ
30 漏水判定装置 31 圧力波センサ 32 チャージアンプ
33 低域CUTフィルタ 34 増幅器 35 A/Dコンバータ
36 電源制御部 37 電源 38 MPU
39 タイマー 40 漏水表示部 50 ピエゾフィルム
60 加速度センサ 61 加算部
【特許請求の範囲】
【請求項1】
水道管に漏水が生じているか否かを判定する装置であって、
前記水道管内の水に生じる圧力波に応じて変化する物理量を測定し、前記物理量に応じた測定信号を出力する測定手段と、
前記出力された測定信号に基づき漏水の有無を判定する判定手段と、を備えることを特徴とする漏水判定装置。
【請求項2】
請求項1記載の漏水判定装置であって、
前記測定手段は、前記水道管の外周に周方向に延びるように取り付けられ、前記水道管の周長の変化に応じた測定信号を出力する歪センサからなることを特徴とする漏水判定装置。
【請求項3】
請求項1記載の漏水判定装置であって、
前記測定手段は、前記水道管に互いに対向するように取り付けられ、前記水道管に生じる振動に応じた加速度信号を出力する一対の加速度センサと、
前記加速度センサより出力された加速度信号を加算して、測定信号を出力する加算手段とからなることを特徴とする漏水判定装置。
【請求項4】
水道管に漏水が生じているか否かを判定する方法であって、
前記水道管内の水に生じる圧力波に応じて変化する物理量を測定し、
前記測定された物理量に基づき漏水の有無を判定することを特徴とする漏水判定方法。
【請求項5】
水道管に取り付けられ、水道管内の水に生じる圧力波に応じた測定信号を出力する圧力波センサであって、
前記水道管の外周に周方向に延びるように取り付けられ、前記水道管の外周の長さの変化に応じた測定信号を出力する歪センサからなることを特徴とする圧力波センサ。
【請求項6】
水道管に取り付けられ、水道管内の水に生じる圧力波に応じた測定信号を出力する圧力波センサであって、
前記水道管に互いに対向するように取り付けられ、前記水道管に生じる振動に応じた加速度信号を出力する一対の加速度センサと、
前記一対の加速度センサより出力された加速度信号を加算して、測定信号を出力する加算手段とからなることを特徴とする圧力波センサ。
【請求項1】
水道管に漏水が生じているか否かを判定する装置であって、
前記水道管内の水に生じる圧力波に応じて変化する物理量を測定し、前記物理量に応じた測定信号を出力する測定手段と、
前記出力された測定信号に基づき漏水の有無を判定する判定手段と、を備えることを特徴とする漏水判定装置。
【請求項2】
請求項1記載の漏水判定装置であって、
前記測定手段は、前記水道管の外周に周方向に延びるように取り付けられ、前記水道管の周長の変化に応じた測定信号を出力する歪センサからなることを特徴とする漏水判定装置。
【請求項3】
請求項1記載の漏水判定装置であって、
前記測定手段は、前記水道管に互いに対向するように取り付けられ、前記水道管に生じる振動に応じた加速度信号を出力する一対の加速度センサと、
前記加速度センサより出力された加速度信号を加算して、測定信号を出力する加算手段とからなることを特徴とする漏水判定装置。
【請求項4】
水道管に漏水が生じているか否かを判定する方法であって、
前記水道管内の水に生じる圧力波に応じて変化する物理量を測定し、
前記測定された物理量に基づき漏水の有無を判定することを特徴とする漏水判定方法。
【請求項5】
水道管に取り付けられ、水道管内の水に生じる圧力波に応じた測定信号を出力する圧力波センサであって、
前記水道管の外周に周方向に延びるように取り付けられ、前記水道管の外周の長さの変化に応じた測定信号を出力する歪センサからなることを特徴とする圧力波センサ。
【請求項6】
水道管に取り付けられ、水道管内の水に生じる圧力波に応じた測定信号を出力する圧力波センサであって、
前記水道管に互いに対向するように取り付けられ、前記水道管に生じる振動に応じた加速度信号を出力する一対の加速度センサと、
前記一対の加速度センサより出力された加速度信号を加算して、測定信号を出力する加算手段とからなることを特徴とする圧力波センサ。
【図1】

【図2】
【図4】
【図6】
【図7】
【図8】
【図3】
【図5】
【図2】
【図4】
【図6】
【図7】
【図8】
【図3】
【図5】
【公開番号】特開2008−64494(P2008−64494A)
【公開日】平成20年3月21日(2008.3.21)
【国際特許分類】
【出願番号】特願2006−240240(P2006−240240)
【出願日】平成18年9月5日(2006.9.5)
【出願人】(390034588)株式会社鶴見精機 (6)
【Fターム(参考)】
【公開日】平成20年3月21日(2008.3.21)
【国際特許分類】
【出願日】平成18年9月5日(2006.9.5)
【出願人】(390034588)株式会社鶴見精機 (6)
【Fターム(参考)】
[ Back to top ]