
潤滑剤分布取得装置及び潤滑剤分布取得方法
【課題】撮像データごとの回転角度ピッチを均一として、軸受内部における潤滑剤の挙動を正確に取得する。
【解決手段】軸受を透過した中性子線を電磁波に変換し、エンコーダ5から出力される軸受の回転角度を示す回転角度信号に基づいて上記電磁波を受けて撮像することにより上記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得する。
【解決手段】軸受を透過した中性子線を電磁波に変換し、エンコーダ5から出力される軸受の回転角度を示す回転角度信号に基づいて上記電磁波を受けて撮像することにより上記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、潤滑剤分布取得装置及び潤滑剤分布取得方法に関するものである。
【背景技術】
【0002】
例えば、特許文献1には、中性子ラジオグラフィ法を用いて、流体軸受内部の潤滑剤の有無を検査する発明が開示されている。
このような特許文献1に開示された発明を用いることによって、従来は分解して確認を行っていた潤滑剤の有無の検査を、軸受を分解することなく行うことができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−292373号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、特許文献1では、潤滑剤の有無のみを検査し、潤滑剤の挙動を検出するためのものではないため、軸受の回転と撮像のタイミングとに同期がとられていない。このため、軸受の回転速度に不均一性や経時変化があった場合には、撮像データごとの回転角度のピッチが不均一となり、比較対照性が低下してしまう。
【0005】
本発明は、上述する問題点に鑑みてなされたもので、撮像データごとの回転角度ピッチを均一とすることが可能で、軸受内部における潤滑剤の挙動を正確に取得することが可能な潤滑剤分布取得装置及び潤滑剤分布取得方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明者等は、軸受内部における潤滑剤の挙動と軸受の寿命との関係について、鋭意研究を行った。その結果、軸受の寿命には、使用環境等が同様の場合であっても個体差が存在することが分かった。寿命の異なるこれらの軸受の分解調査を行ったところ、内部に残存する潤滑剤の様子が大きく異なることが分かった。特に、転がり軸受では、内部の潤滑剤の挙動が寿命に大きく影響していることが分かった。
これは、軸受の寿命が内部の潤滑剤の挙動に依存することを示唆するものである。つまり、軸受内部の潤滑剤の挙動を知ることができれば、軸受の寿命を改善できる可能性があることとなる。
【0007】
かかる研究結果を踏まえ、第1の発明は、潤滑剤分布取得装置であって、軸受を透過した中性子線を受けて電磁波に変換する電磁波変換手段と、上記電磁波変換手段から射出される電磁波を受けて撮像することにより上記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得する撮像処理手段と、上記軸受の回転角度を示す回転角度信号を出力するエンコーダと、上記回転角度信号に基づいて上記撮像処理手段による撮像タイミングを制御する制御手段とを備えるという構成を採用する。
【0008】
第2の発明は、上記第1の発明において、上記電磁波変換手段から射出された電磁波を上記撮像処理手段に到達する前に増幅する電磁波増幅手段を備え、上記制御手段が、上記撮像タイミングに合わせて上記電磁波増幅手段に上記電磁波を増幅させるという構成を採用する。
【0009】
第3の発明は、上記第2の発明において、上記撮像処理手段における露光期間の開始タイミングが、上記電磁波増幅手段における上記電磁波の増幅開始タイミングよりも上記電磁波増幅手段における残像期間以上遅れて設定されているという構成を採用する。
【0010】
第4の発明は、上記第1〜第3いずれかの発明において、軸受が少なくとも1つの転動体が他の転動体と中性子線吸収率が異なる材料である転がり軸受とされ、上記制御手段が、予め定められた設定回転角度で上記撮像処理手段に撮像させることで複数の撮像データを取得させると共に、上記撮像処理手段に複数の撮像データを用いて上記転動体の滑り量を算出させるという構成を採用する。
【0011】
第5の発明は、潤滑剤分布取得方法であって、軸受を透過した中性子線を電磁波に変換し、エンコーダから出力される軸受の回転角度を示す回転角度信号に基づいて上記電磁波を受けて撮像することにより上記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得するという構成を採用する。
【発明の効果】
【0012】
本発明によれば、エンコーダから出力される軸受の回転角度を示す信号である回転角度信号に基づいて撮像が行われる。
このため、回転速度の不均一性や経時変化が生じた場合であっても、常に正確に軸受の回転角度に合わせて撮像を行うことができる。
したがって、撮像データごとの回転角度ピッチを均一とすることが可能で、軸受内部における潤滑剤の挙動を正確に取得することが可能となる。
【図面の簡単な説明】
【0013】
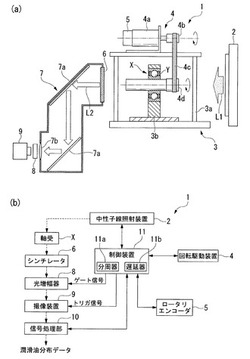
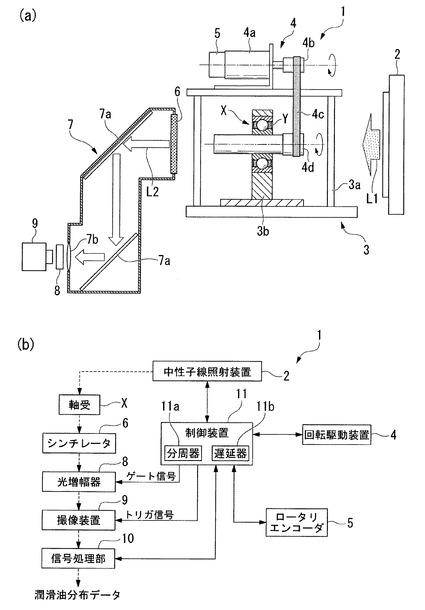
【図1】本発明の一実施形態の潤滑剤分布取得装置の概略構成を模式的に示すものであり、(a)が機構の一部を示す模式図であり、(b)が機能構成の一部を示すブロック図である。
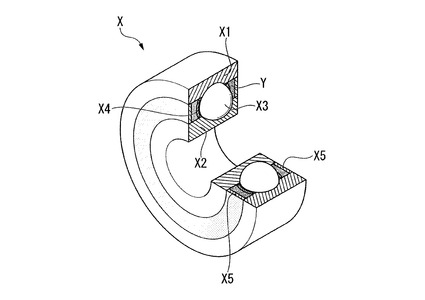
【図2】本発明の一実施形態の潤滑剤分布取得装置に設置される軸受の概略構成を示すカットモデルの斜視図である。
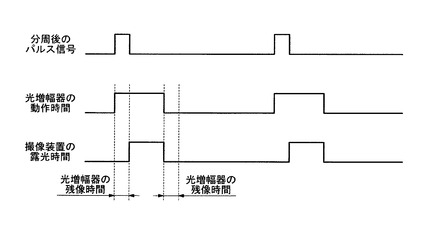
【図3】本発明の一実施形態の潤滑剤分布取得装置における撮像タイミングを示すタイミングチャートである。
【図4】本発明の一実施形態の潤滑剤分布取得装置に用いられる軸受の変化例を示す模式図である。
【図5】軸受内部の撮像結果を示す写真である。
【発明を実施するための形態】
【0014】
以下、図面を参照して、本発明に係る潤滑剤分布取得装置及び潤滑剤分布取得方法の一実施形態について説明する。なお、以下の図面において、各部材を認識可能な大きさとするために、各部材の縮尺を適宜変更している。
【0015】
図1は、本実施形態の潤滑剤分布取得装置1の概略構成を模式的に示すものであり、(a)が機構の一部を示す模式図であり、(b)が機能構成の一部を示すブロック図である。
本実施形態の潤滑剤分布取得装置1は、軸受Xの内部における潤滑剤Y(例えばグリース)の分布を取得することにより玉軸受である軸受Xが回転駆動されている最中の潤滑剤Yの挙動を取得するためのものである。
そして、この本実施形態の潤滑剤分布取得装置1は、図1に示すように、中性子線照射装置2と、軸受支持機構3と、回転駆動装置4(回転駆動手段)と、ロータリエンコーダ5(エンコーダ)と、シンチレータ6(電磁波変換手段)と、導光機構7と、光増幅器8(電磁波増幅手段)と、撮像装置9と、信号処理部10と、制御装置11(制御手段)とを備えている。
【0016】
中性子線照射装置2は、例えば原子炉等の中性子源から射出された中性子線L1を案内して軸受Xに対して軸心方向から照射するものである。
なお、中性子源から射出される中性子線を案内することなく軸心方向から軸受Xに照射可能である場合には、中性子線照射装置2を省略することもできる。
また、本実施形態の潤滑剤分布取得装置1では、例えばイオン発生器で派生させた水素あるいはヘリウム等のイオンをターゲットに照射することによって中性子線を発生する中性子源を別途備えていても良い。
【0017】
軸受支持機構3は、軸受Xを支持するためのものであり、筐体3aと、ハウジング3bとを備えている。
筐体3aは、内部にハウジング3b及び当該ハウジング3bに固定される軸受Xを収容する枠体あるいは箱状の部材である。本実施形態において筐体3aは、図1(a)に示すように、回転駆動装置4の支持台としても機能する。
ハウジング3bは、軸受Xの外輪を覆って支持するものであり、軸受Xを着脱可能に支持している。そして、本実施形態においてハウジング3bは、図1(a)に示すように、軸受Xの軸心が中性子線照射装置2側を向くように軸受Xを支持する。
なお、筐体3a及びハウジング3bは、中性子線L1の通過領域を避ける形状を有していることが好ましいが、中性子線L1の吸収率が極めて低いアルミニウム材料等によって形成すれば中性子線L1の通過領域を跨ぐ形状を有することも可能である。
【0018】
回転駆動装置4は、軸受Xを回転駆動するものであり、図1(a)に示すように、軸受Xを回転駆動するための動力を発生するモータ4a(動力部)と、当該モータ4aにて発生された動力を軸受Xにベルト伝達するためのプーリ4b、ベルト4c(帯状部材)及び駆動軸部4dとを備えている。
より詳細には、プーリ4bは、カップリング等によってモータ4aの軸部と連結されている。また、駆動軸部4dは、軸受Xの軸心方向に長い棒状部材であり、軸受Xの内輪に固定されると共に軸受Xの中央を貫通して水平に配設されている。そして、無端ベルトからなるベルト4cは、プーリ4b及び駆動軸部4dに廻し掛けられている。
【0019】
ロータリエンコーダ5は、軸受Xの回転角度を示す回転角度信号を出力するものである。
このロータリエンコーダ5は、軸受Xと同期して回転するモータ4aの回転軸に対して接続されており、モータ4aの回転軸が回転駆動されることによって回転角度(回転速度)に応じたパルス信号を出力するものである。このロータリエンコーダ5としては、例えば、パルス出力(インクリメンタル)型のロータリエンコーダを用いることができる。
【0020】
シンチレータ6は、軸受Xを透過した中性子線L1を受けて光L2を発光するものであり、中性子線L1を可視光に変換するものである。
このシンチレータ6としては、例えば、LiF/ZnS(Ag)、BN/ZnS (Ag)、Gd2O3/ZnS(Ag)、Gd2O3S(Tb)を用いることができる。
【0021】
導光機構7は、シンチレータ6から射出された光L2を光増幅器8を介して撮像装置9まで導光するものである。
この導光機構7は、図1(a)に示すように、光L2を反射して案内するミラー7aと、光L2を集光するレンズ7b等を備えている。
【0022】
光増幅器8は、導光機構7を介して入射される光の強度を高めて出力するものであり、例えば、イメージインテンシファイアを用いることができる。
そして、本実施形態において光増幅器8は、制御装置11の制御の下、制御装置11から指示された期間のみ光L2の強度を増幅する。より詳細には、光増幅器8は、制御装置11から光の増幅期間を示すゲート信号が入力され、当該ゲート信号に基づいて光L2の増幅を行う。
なお、本実施形態において光増幅器8は、制御装置11から指示された期間のみ光L2の強度を増幅するため、常に光L2の増幅を行っているのではなく休止期間を得ることができる。このような休止期間を得ることによって、光増幅器8の焼き付きを防止して耐久性を向上することができるため、本実施形態の光増幅器8では、光L2の増幅する期間の出力を高めるようにしている。
このように、光増幅器8の出力を高めることによって、撮像装置9における露光時間を短くしても鮮明な撮像データを得ることができ、露光時間を短くすることによってブレの少ない撮像データを得ることができる。
【0023】
撮像装置9は、シンチレータ6から射出され、導光機構7及び光増幅器8を介して到達した光L2を受光して撮像するものであり、撮像結果を撮像データとして出力する。
なお、撮像装置9としては、CCDカメラ、SIT管カメラ、高速度カメラ等を用いることが可能であるが、例えば6000rpm程度で高速回転する軸受Xの内部での潤滑剤Yの移動は高速であるため、2000fps程度のフレームレートの高い撮像が可能な高速度カメラを用いることが好ましい。
【0024】
そして、本実施形態において撮像装置9は、制御装置11の制御の下、制御装置11から指示されたタイミングで撮像を行う。より詳細には、撮像装置9は、制御装置11から撮像タイミングを示すトリガ信号が入力され、当該トリガ信号に基づいて撮像を行う。
なお、光増幅器8では、上記ゲート信号の入力に対する応答が一定時間遅れる特性がある。つまり、光増幅器8は、一定の残像期間を有している。このため、本実施形態においては、撮像装置9の露光期間の開始タイミングが、光増幅器8の残像期間以上に遅れて設定されている。
このように、撮像装置9の露光期間の開始タイミングが、光増幅器8の残像期間以上に遅れて設定されることによって、撮像装置9で光L2が増幅されるより前に撮像が開始されることを防止することができる。
なお、露光期間の終了タイミングは、光増幅器8の光増幅期間の終了タイミングから残像期間を足した期間よりも短く設定されれば良い。
【0025】
信号処理部10は、撮像装置9から入力される撮像データを加工して要求される潤滑剤分布データとして出力するものである。
なお、ここで言う潤滑剤分布データとは、軸心を中心とする半径方向における潤滑剤の分布情報及び軸心方向の潤滑剤の厚み分布情報を含むデータである。そして、本実施形態において信号処理部10は、例えば、撮像データにおける明るさ情報から潤滑剤分布データを算出したり、当該潤滑剤分布データをロータリエンコーダ5の検出結果と関連付ける処理を行ったりする。
なお、撮像装置9で撮像された撮像データ自体にも軸心を中心とする半径方向における潤滑剤の分布情報及び軸心方向の潤滑剤の厚み分布情報が含まれるため、要求される潤滑剤分布データを撮像データとすることも可能である。この場合には、信号処理部10は、撮像装置9から入力される撮像データをそのまま潤滑剤分布データとして出力する。
【0026】
なお、本実施形態においては、本発明の撮像処理手段が、撮像装置9と信号処理部10とによって構成されている。
【0027】
制御装置11は、本実施形態の潤滑剤分布取得装置1の動作全体を制御するものであり、図1(b)に示すように、中性子線照射装置2、回転駆動装置4、ロータリエンコーダ5、光増幅器8、撮像装置9及び信号処理部10と電気的に接続されている。
【0028】
そして、本実施形態において制御装置11は、ロータリエンコーダ5から入力される回転角度信号に基づいて撮像装置9の撮像タイミングを制御し、当該撮像タイミングに合わせて光増幅器8に光L2を増幅させる。
【0029】
より詳細には、制御装置11は、図1(b)に示すように、分周器11aと遅延器11bとを備えている。そして、制御装置11は、ロータリエンコーダ5から入力された回転角度信号を分周器11aで分周することによってトリガ信号を生成し、当該トリガ信号を起点とし光増幅器の動作期間を示す幅を持ったゲート信号(光増幅器8で光増幅するタイミングを示す信号)を生成して、光増幅器8に入力する。
また、上述のように本実施形態においては、撮像装置9の露光時間の開始タイミングが光増幅器8の残像時間を考慮して光増幅の開始タイミングよりも遅れるように設定されている。このため、制御装置11は、回転角度信号を分周器11aで分周して得られたトリガ信号を一定時間遅延させた時点を起点とし露光時間を示す幅を持った露光指令信号(撮像装置9で撮像するタイミングを示す信号)を生成し、当該露光指令信号を撮像装置9に入力する。
この結果、図3に示すように、分周後のトリガ信号の周波数に合わせて光増幅器8が動作する。なお、光増幅器8の動作期間は予め光増幅器8に記憶させ、制御装置11から光増幅器8にトリガ信号を直接入力する構成としても良い。また、撮像装置9の露光時間を予め撮像装置9に記憶させ、制御装置1から撮像装置9にトリガ信号を一定時間遅延させた信号を与える構成としても良い。当該撮像装置9の露光時間は、光増幅器8の動作期間と残像期間を考慮した範囲となる。
【0030】
なお、本実施形態においては、ロータリエンコーダ5からの回転角度信号であるパルス信号の周波数がゲート信号やトリガ信号の周波数よりも高いことを前提としているため、制御装置11が分周器11aを備える構成としている。しかしながら、ロータリエンコーダ5から出力されるパルス信号がゲート信号やトリガ信号の周波数よりも低い場合には、制御装置11は分周器11aに換えて逓倍器を備えることとなる。
【0031】
軸受Xは、内部に潤滑剤を含む玉軸受(転がり軸受)であり、本実施形態においてはラジアル軸受として構成されている。
図2は、軸受Xの概略構成を示すカットモデルの斜視図である。この図に示すように、軸受Xは、半径方向に対向配置される環状の外輪X1及び内輪X2と、外輪X1と内輪X2との間に配置される複数の玉X3と、玉X3同士の間隔を等間隔に保持するための保持器X4と、玉X3の収容空間を封止するシールX5とを備えている。
なお、撮像データにおける潤滑剤Yの視認性を高めてより正確な分布を取得するためには、撮像データに軸受Xの構成要素が写らないことが望ましい。このため、軸受Xのこれらの構成要素(外輪X1、内輪X2、玉X3、保持器X4及びシールX5)は、中性子線L1の吸収率が低いアルミニウム材料から形成されていることが好ましい。
【0032】
次に、上述のように構成された本実施形態の潤滑剤分布取得装置1の動作(潤滑剤分布取得方法)について説明する。なお、以下に説明する本実施形態の潤滑剤分布取得装置1の動作の主体は、制御装置11である。
【0033】
まず、制御装置11は、回転駆動装置4に軸受Xを回転駆動させる。この結果、軸受Xの内輪X2が回転駆動されて内輪X2と外輪X1との間に挟まれた玉X3が自転しながら、軸心を中心として公転し、潤滑剤Yが玉X3の移動に伴って軸受X内部を移動する。
【0034】
このように軸受Xが回転駆動されると、ロータリエンコーダ5から回転角度信号であるパルス信号が制御装置11に入力される。
制御装置11は、当該パルス信号からゲート信号及びトリガ信号を生成し、ゲート信号を光増幅器8に入力し、トリガ信号を撮像装置9に入力する。
この結果、撮像装置9は常に軸受Xの回転角度に同期して撮像を行い、光増幅器8は撮像装置9で撮像されるタイミングに合わせて光L2を増幅するようになる。
【0035】
そして、中性子線照射装置2にて中性子線L1が案内されると、図1(a)に示すように、中性子線L1が軸受Xの軸心方向から軸受Xに入射すると、軸受Xを透過した中性子線L1がシンチレータ6に入射する。
【0036】
このようにシンチレータ6に中性子線L1がシンチレータ6に入射すると、シンチレータ6が中性子線L1の強度分布と同様の強度分布を有する光L2を発光する。つまり、シンチレータ6は、中性子線L1を光L2に変換して射出する。
【0037】
シンチレータ6から射出された光L2は、導光機構7に案内されて光増幅器8にて増幅された後、撮像装置9に入射する。
そして、制御装置11は、撮像装置9に撮像を行わせる。この結果、撮像装置9にて撮像データが取得される。
【0038】
続いて制御装置11は、信号処理部10に撮像データを加工等させることによって、軸心を中心とする半径方向における潤滑剤の分布情報及び軸心方向の潤滑剤の厚み分布情報を含む潤滑剤分布データを算出させる。
また、信号処理部10は、算出した潤滑剤分布データをロータリエンコーダ5の検出結果と関連付ける処理を行ったりする。この結果、潤滑剤分布データは、軸受Xの回転角度に関連付けられて出力されることとなる。
【0039】
ここで、潤滑剤Yは有機物からなり軸受Xよりも中性子線の吸収率が高い。このため、軸受Xを透過した中性子線L1は、潤滑剤Yが存在する領域で大きく減衰する。一方で、中性子線L1の強度分布と当該中性子線L1が変換された光L2の強度分布とは比例する。
したがって、軸受Xに対して軸心方向から中性子線L1が入射し、軸受Xを透過した中性子線L1を光L2に変換して撮像することによって、撮像データの明るさの分布から軸心を中心とする半径方向における潤滑剤Yの分布を取得することができる。
【0040】
また、中性子線L1の減衰量は、通過領域における潤滑剤Yの厚みに比例する。つまり、通過領域における潤滑剤Yの厚みが厚い程、中性子線L1の減衰量が大きくなって当該領域における中性子線L1の強度が低下する。一方で、中性子線L1の強度分布と当該中性子線L1が変換された光L2の強度分布とは比例する。したがって、軸受Xに対して軸心方向から中性子線L1が入射し、軸受Xを透過した中性子線L1を光L2に変換して撮像することによって、撮像データの明るさ分布から軸心方向の潤滑剤の厚み分布を取得することができる。
【0041】
そして、本実施形態の潤滑剤分布取得装置1及び潤滑剤分布取得方法においては、軸受Xに対して軸心方向から入射して透過した中性子線L1を光L2に変化し、当該光L2を受光して撮像することにより軸受X内部における潤滑剤Yの分布を示す潤滑剤分布データを取得する。
このため、本実施形態の潤滑剤分布取得装置1及び潤滑剤分布取得方法によれば、軸受Xを分解することなく、軸心を中心とする半径方向における潤滑剤Yの分布及び軸心方向の潤滑剤Yの厚み分布を含む潤滑剤分布データを取得することができ、軸受X内部における潤滑剤Yの挙動を詳細に取得することが可能となる。
【0042】
以上のような本実施形態の潤滑剤分布取得装置1及び潤滑剤分布取得方法によれば、 ロータリエンコーダ5から出力される軸受Xの回転角度を示す信号である回転角度信号に基づいて撮像が行われる。
このため、軸受Xにおいて回転速度の不均一性や経時変化が生じた場合であっても、常に正確に軸受Xの回転角度に合わせて撮像を行うことができる。
したがって、撮像データごとの回転角度ピッチを均一とすることが可能で、軸受X内部における潤滑剤の挙動を正確に取得することが可能となる。
【0043】
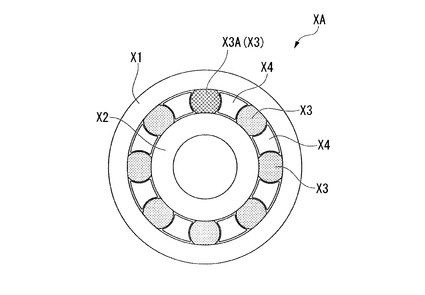
なお、本実施形態の潤滑剤分布取得装置1においては、図4に示すように、1つのみが材質の異なった(中性子線吸収率の異なった)玉X3A(転動体)を備える軸受けXAを設置するようにしても良い。
【0044】
このような軸受XAを設置することによって、撮像データにおいて玉X3Aを他の玉X3と区別することができる。
また、玉X3及び玉X3Aは、軸受Xが回転駆動されることによって、軸受Xの内部にて公転する。そして公転量は、玉X3及び玉X3Aに作用する摩擦力等によって計算することができる。したがって、本実施形態の潤滑剤分布取得装置1によれば、撮像データごとの回転角度ピッチを均一とすることができるため、この回転角度ピッチから玉X3及び玉X3Aの公転量を正確に算出することができる。
このため、例えば、複数の撮像データを取得し、信号処理部10に回転角度ピッチから玉X3及び玉X3Aの公転量を算出させ、実際の撮像データにおける玉X3及び玉X3Aの位置と比較させることで、玉X3及び玉X3Aの滑り量を算出させることができる。
【0045】
このように、本実施形態の潤滑剤分布取得装置1によれば、1つの玉X3Aが他の玉X3と中性子線吸収率が異なる軸受XAを用いることによって、玉X3及び玉X3Aの滑り量を算出することができる。
【0046】
なお、中性子線吸収率の異なる玉X3Aは必ずしも1つである必要はなく、複数であっても良い。
また、玉X3A全体の中性子吸収率を変化させる必要もなく、例えば、玉X3Aの一部の材質を変化させることによって玉X3Aの中性子吸収率を変化させるようにしても良い。玉X3Aの一部の材質は、例えば鉄、アルミニウム、セラミック等から適宜選べば良い。
【0047】
以上、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明は、上記実施形態に限定されないことは言うまでもない。上述した実施形態において示した各構成部材の諸形状や組み合わせ等は一例であって、本発明の趣旨から逸脱しない範囲において設計要求等に基づき種々変更可能である。
【0048】
例えば、上記実施形態においては、本発明のエンコーダとして、インクリメンタルエンコーダを用いる構成について説明した。
しかしながら、本発明は、これに限定されるものではなく、例えば、アブソリュートエンコーダ等の他のエンコーダを用いることも可能である。
【0049】
例えば、回転駆動装置において、歯付きのプーリや歯付きのベルトを用いることもできる。また、スプロケットとチェーンを用いることも可能である。
【0050】
また、上記実施形態においては、軸受Xがラジアル方向に荷重を受ける玉軸受である構成について説明した。
しかしながら、本発明は、例えば、コロ軸受、滑り軸受、またはスラスト方向に荷重を受ける軸受等の他の軸受内部における潤滑剤の挙動の取得に用いることも可能である。
【0051】
また、上記実施形態においては、中性子線L1が軸心方向から軸受を透過する構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、中性子線L1が軸心に対して斜め方向から軸受を透過する構成を採用することも可能である。
【0052】
また、上記実施形態においては、シンチレータ6を用いて中性子線L1を光L2に変換する構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、中性子線L1をγ線等の放射線(電磁波)に変換して撮像するようにしても良い。
【0053】
また、上記実施形態においては、撮像装置9でデジタル撮影を行う構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、撮像装置でフィルム撮影を行っても良い。
【0054】
なお、上述のように中性子線L1をγ線に変換してフィルム撮影を行った結果、図5に示すような画像が撮像された。
このような撮像結果から分かるように、本発明によれば、軸受の内部を撮像することができる。
【符号の説明】
【0055】
1……潤滑剤分布取得装置、2……中性子線照射装置、4……回転駆動装置、5……ロータリエンコーダ(エンコーダ)、6……シンチレータ(電磁波変換手段)、8……光増幅器(電磁波増幅手段)、9……撮像装置(撮像手段)、10……信号処理部、11……制御装置、L1……中性子線、L2……光(電磁波)、X,XA……軸受、Y……潤滑剤
【技術分野】
【0001】
本発明は、潤滑剤分布取得装置及び潤滑剤分布取得方法に関するものである。
【背景技術】
【0002】
例えば、特許文献1には、中性子ラジオグラフィ法を用いて、流体軸受内部の潤滑剤の有無を検査する発明が開示されている。
このような特許文献1に開示された発明を用いることによって、従来は分解して確認を行っていた潤滑剤の有無の検査を、軸受を分解することなく行うことができる。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2000−292373号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところが、特許文献1では、潤滑剤の有無のみを検査し、潤滑剤の挙動を検出するためのものではないため、軸受の回転と撮像のタイミングとに同期がとられていない。このため、軸受の回転速度に不均一性や経時変化があった場合には、撮像データごとの回転角度のピッチが不均一となり、比較対照性が低下してしまう。
【0005】
本発明は、上述する問題点に鑑みてなされたもので、撮像データごとの回転角度ピッチを均一とすることが可能で、軸受内部における潤滑剤の挙動を正確に取得することが可能な潤滑剤分布取得装置及び潤滑剤分布取得方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明者等は、軸受内部における潤滑剤の挙動と軸受の寿命との関係について、鋭意研究を行った。その結果、軸受の寿命には、使用環境等が同様の場合であっても個体差が存在することが分かった。寿命の異なるこれらの軸受の分解調査を行ったところ、内部に残存する潤滑剤の様子が大きく異なることが分かった。特に、転がり軸受では、内部の潤滑剤の挙動が寿命に大きく影響していることが分かった。
これは、軸受の寿命が内部の潤滑剤の挙動に依存することを示唆するものである。つまり、軸受内部の潤滑剤の挙動を知ることができれば、軸受の寿命を改善できる可能性があることとなる。
【0007】
かかる研究結果を踏まえ、第1の発明は、潤滑剤分布取得装置であって、軸受を透過した中性子線を受けて電磁波に変換する電磁波変換手段と、上記電磁波変換手段から射出される電磁波を受けて撮像することにより上記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得する撮像処理手段と、上記軸受の回転角度を示す回転角度信号を出力するエンコーダと、上記回転角度信号に基づいて上記撮像処理手段による撮像タイミングを制御する制御手段とを備えるという構成を採用する。
【0008】
第2の発明は、上記第1の発明において、上記電磁波変換手段から射出された電磁波を上記撮像処理手段に到達する前に増幅する電磁波増幅手段を備え、上記制御手段が、上記撮像タイミングに合わせて上記電磁波増幅手段に上記電磁波を増幅させるという構成を採用する。
【0009】
第3の発明は、上記第2の発明において、上記撮像処理手段における露光期間の開始タイミングが、上記電磁波増幅手段における上記電磁波の増幅開始タイミングよりも上記電磁波増幅手段における残像期間以上遅れて設定されているという構成を採用する。
【0010】
第4の発明は、上記第1〜第3いずれかの発明において、軸受が少なくとも1つの転動体が他の転動体と中性子線吸収率が異なる材料である転がり軸受とされ、上記制御手段が、予め定められた設定回転角度で上記撮像処理手段に撮像させることで複数の撮像データを取得させると共に、上記撮像処理手段に複数の撮像データを用いて上記転動体の滑り量を算出させるという構成を採用する。
【0011】
第5の発明は、潤滑剤分布取得方法であって、軸受を透過した中性子線を電磁波に変換し、エンコーダから出力される軸受の回転角度を示す回転角度信号に基づいて上記電磁波を受けて撮像することにより上記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得するという構成を採用する。
【発明の効果】
【0012】
本発明によれば、エンコーダから出力される軸受の回転角度を示す信号である回転角度信号に基づいて撮像が行われる。
このため、回転速度の不均一性や経時変化が生じた場合であっても、常に正確に軸受の回転角度に合わせて撮像を行うことができる。
したがって、撮像データごとの回転角度ピッチを均一とすることが可能で、軸受内部における潤滑剤の挙動を正確に取得することが可能となる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態の潤滑剤分布取得装置の概略構成を模式的に示すものであり、(a)が機構の一部を示す模式図であり、(b)が機能構成の一部を示すブロック図である。
【図2】本発明の一実施形態の潤滑剤分布取得装置に設置される軸受の概略構成を示すカットモデルの斜視図である。
【図3】本発明の一実施形態の潤滑剤分布取得装置における撮像タイミングを示すタイミングチャートである。
【図4】本発明の一実施形態の潤滑剤分布取得装置に用いられる軸受の変化例を示す模式図である。
【図5】軸受内部の撮像結果を示す写真である。
【発明を実施するための形態】
【0014】
以下、図面を参照して、本発明に係る潤滑剤分布取得装置及び潤滑剤分布取得方法の一実施形態について説明する。なお、以下の図面において、各部材を認識可能な大きさとするために、各部材の縮尺を適宜変更している。
【0015】
図1は、本実施形態の潤滑剤分布取得装置1の概略構成を模式的に示すものであり、(a)が機構の一部を示す模式図であり、(b)が機能構成の一部を示すブロック図である。
本実施形態の潤滑剤分布取得装置1は、軸受Xの内部における潤滑剤Y(例えばグリース)の分布を取得することにより玉軸受である軸受Xが回転駆動されている最中の潤滑剤Yの挙動を取得するためのものである。
そして、この本実施形態の潤滑剤分布取得装置1は、図1に示すように、中性子線照射装置2と、軸受支持機構3と、回転駆動装置4(回転駆動手段)と、ロータリエンコーダ5(エンコーダ)と、シンチレータ6(電磁波変換手段)と、導光機構7と、光増幅器8(電磁波増幅手段)と、撮像装置9と、信号処理部10と、制御装置11(制御手段)とを備えている。
【0016】
中性子線照射装置2は、例えば原子炉等の中性子源から射出された中性子線L1を案内して軸受Xに対して軸心方向から照射するものである。
なお、中性子源から射出される中性子線を案内することなく軸心方向から軸受Xに照射可能である場合には、中性子線照射装置2を省略することもできる。
また、本実施形態の潤滑剤分布取得装置1では、例えばイオン発生器で派生させた水素あるいはヘリウム等のイオンをターゲットに照射することによって中性子線を発生する中性子源を別途備えていても良い。
【0017】
軸受支持機構3は、軸受Xを支持するためのものであり、筐体3aと、ハウジング3bとを備えている。
筐体3aは、内部にハウジング3b及び当該ハウジング3bに固定される軸受Xを収容する枠体あるいは箱状の部材である。本実施形態において筐体3aは、図1(a)に示すように、回転駆動装置4の支持台としても機能する。
ハウジング3bは、軸受Xの外輪を覆って支持するものであり、軸受Xを着脱可能に支持している。そして、本実施形態においてハウジング3bは、図1(a)に示すように、軸受Xの軸心が中性子線照射装置2側を向くように軸受Xを支持する。
なお、筐体3a及びハウジング3bは、中性子線L1の通過領域を避ける形状を有していることが好ましいが、中性子線L1の吸収率が極めて低いアルミニウム材料等によって形成すれば中性子線L1の通過領域を跨ぐ形状を有することも可能である。
【0018】
回転駆動装置4は、軸受Xを回転駆動するものであり、図1(a)に示すように、軸受Xを回転駆動するための動力を発生するモータ4a(動力部)と、当該モータ4aにて発生された動力を軸受Xにベルト伝達するためのプーリ4b、ベルト4c(帯状部材)及び駆動軸部4dとを備えている。
より詳細には、プーリ4bは、カップリング等によってモータ4aの軸部と連結されている。また、駆動軸部4dは、軸受Xの軸心方向に長い棒状部材であり、軸受Xの内輪に固定されると共に軸受Xの中央を貫通して水平に配設されている。そして、無端ベルトからなるベルト4cは、プーリ4b及び駆動軸部4dに廻し掛けられている。
【0019】
ロータリエンコーダ5は、軸受Xの回転角度を示す回転角度信号を出力するものである。
このロータリエンコーダ5は、軸受Xと同期して回転するモータ4aの回転軸に対して接続されており、モータ4aの回転軸が回転駆動されることによって回転角度(回転速度)に応じたパルス信号を出力するものである。このロータリエンコーダ5としては、例えば、パルス出力(インクリメンタル)型のロータリエンコーダを用いることができる。
【0020】
シンチレータ6は、軸受Xを透過した中性子線L1を受けて光L2を発光するものであり、中性子線L1を可視光に変換するものである。
このシンチレータ6としては、例えば、LiF/ZnS(Ag)、BN/ZnS (Ag)、Gd2O3/ZnS(Ag)、Gd2O3S(Tb)を用いることができる。
【0021】
導光機構7は、シンチレータ6から射出された光L2を光増幅器8を介して撮像装置9まで導光するものである。
この導光機構7は、図1(a)に示すように、光L2を反射して案内するミラー7aと、光L2を集光するレンズ7b等を備えている。
【0022】
光増幅器8は、導光機構7を介して入射される光の強度を高めて出力するものであり、例えば、イメージインテンシファイアを用いることができる。
そして、本実施形態において光増幅器8は、制御装置11の制御の下、制御装置11から指示された期間のみ光L2の強度を増幅する。より詳細には、光増幅器8は、制御装置11から光の増幅期間を示すゲート信号が入力され、当該ゲート信号に基づいて光L2の増幅を行う。
なお、本実施形態において光増幅器8は、制御装置11から指示された期間のみ光L2の強度を増幅するため、常に光L2の増幅を行っているのではなく休止期間を得ることができる。このような休止期間を得ることによって、光増幅器8の焼き付きを防止して耐久性を向上することができるため、本実施形態の光増幅器8では、光L2の増幅する期間の出力を高めるようにしている。
このように、光増幅器8の出力を高めることによって、撮像装置9における露光時間を短くしても鮮明な撮像データを得ることができ、露光時間を短くすることによってブレの少ない撮像データを得ることができる。
【0023】
撮像装置9は、シンチレータ6から射出され、導光機構7及び光増幅器8を介して到達した光L2を受光して撮像するものであり、撮像結果を撮像データとして出力する。
なお、撮像装置9としては、CCDカメラ、SIT管カメラ、高速度カメラ等を用いることが可能であるが、例えば6000rpm程度で高速回転する軸受Xの内部での潤滑剤Yの移動は高速であるため、2000fps程度のフレームレートの高い撮像が可能な高速度カメラを用いることが好ましい。
【0024】
そして、本実施形態において撮像装置9は、制御装置11の制御の下、制御装置11から指示されたタイミングで撮像を行う。より詳細には、撮像装置9は、制御装置11から撮像タイミングを示すトリガ信号が入力され、当該トリガ信号に基づいて撮像を行う。
なお、光増幅器8では、上記ゲート信号の入力に対する応答が一定時間遅れる特性がある。つまり、光増幅器8は、一定の残像期間を有している。このため、本実施形態においては、撮像装置9の露光期間の開始タイミングが、光増幅器8の残像期間以上に遅れて設定されている。
このように、撮像装置9の露光期間の開始タイミングが、光増幅器8の残像期間以上に遅れて設定されることによって、撮像装置9で光L2が増幅されるより前に撮像が開始されることを防止することができる。
なお、露光期間の終了タイミングは、光増幅器8の光増幅期間の終了タイミングから残像期間を足した期間よりも短く設定されれば良い。
【0025】
信号処理部10は、撮像装置9から入力される撮像データを加工して要求される潤滑剤分布データとして出力するものである。
なお、ここで言う潤滑剤分布データとは、軸心を中心とする半径方向における潤滑剤の分布情報及び軸心方向の潤滑剤の厚み分布情報を含むデータである。そして、本実施形態において信号処理部10は、例えば、撮像データにおける明るさ情報から潤滑剤分布データを算出したり、当該潤滑剤分布データをロータリエンコーダ5の検出結果と関連付ける処理を行ったりする。
なお、撮像装置9で撮像された撮像データ自体にも軸心を中心とする半径方向における潤滑剤の分布情報及び軸心方向の潤滑剤の厚み分布情報が含まれるため、要求される潤滑剤分布データを撮像データとすることも可能である。この場合には、信号処理部10は、撮像装置9から入力される撮像データをそのまま潤滑剤分布データとして出力する。
【0026】
なお、本実施形態においては、本発明の撮像処理手段が、撮像装置9と信号処理部10とによって構成されている。
【0027】
制御装置11は、本実施形態の潤滑剤分布取得装置1の動作全体を制御するものであり、図1(b)に示すように、中性子線照射装置2、回転駆動装置4、ロータリエンコーダ5、光増幅器8、撮像装置9及び信号処理部10と電気的に接続されている。
【0028】
そして、本実施形態において制御装置11は、ロータリエンコーダ5から入力される回転角度信号に基づいて撮像装置9の撮像タイミングを制御し、当該撮像タイミングに合わせて光増幅器8に光L2を増幅させる。
【0029】
より詳細には、制御装置11は、図1(b)に示すように、分周器11aと遅延器11bとを備えている。そして、制御装置11は、ロータリエンコーダ5から入力された回転角度信号を分周器11aで分周することによってトリガ信号を生成し、当該トリガ信号を起点とし光増幅器の動作期間を示す幅を持ったゲート信号(光増幅器8で光増幅するタイミングを示す信号)を生成して、光増幅器8に入力する。
また、上述のように本実施形態においては、撮像装置9の露光時間の開始タイミングが光増幅器8の残像時間を考慮して光増幅の開始タイミングよりも遅れるように設定されている。このため、制御装置11は、回転角度信号を分周器11aで分周して得られたトリガ信号を一定時間遅延させた時点を起点とし露光時間を示す幅を持った露光指令信号(撮像装置9で撮像するタイミングを示す信号)を生成し、当該露光指令信号を撮像装置9に入力する。
この結果、図3に示すように、分周後のトリガ信号の周波数に合わせて光増幅器8が動作する。なお、光増幅器8の動作期間は予め光増幅器8に記憶させ、制御装置11から光増幅器8にトリガ信号を直接入力する構成としても良い。また、撮像装置9の露光時間を予め撮像装置9に記憶させ、制御装置1から撮像装置9にトリガ信号を一定時間遅延させた信号を与える構成としても良い。当該撮像装置9の露光時間は、光増幅器8の動作期間と残像期間を考慮した範囲となる。
【0030】
なお、本実施形態においては、ロータリエンコーダ5からの回転角度信号であるパルス信号の周波数がゲート信号やトリガ信号の周波数よりも高いことを前提としているため、制御装置11が分周器11aを備える構成としている。しかしながら、ロータリエンコーダ5から出力されるパルス信号がゲート信号やトリガ信号の周波数よりも低い場合には、制御装置11は分周器11aに換えて逓倍器を備えることとなる。
【0031】
軸受Xは、内部に潤滑剤を含む玉軸受(転がり軸受)であり、本実施形態においてはラジアル軸受として構成されている。
図2は、軸受Xの概略構成を示すカットモデルの斜視図である。この図に示すように、軸受Xは、半径方向に対向配置される環状の外輪X1及び内輪X2と、外輪X1と内輪X2との間に配置される複数の玉X3と、玉X3同士の間隔を等間隔に保持するための保持器X4と、玉X3の収容空間を封止するシールX5とを備えている。
なお、撮像データにおける潤滑剤Yの視認性を高めてより正確な分布を取得するためには、撮像データに軸受Xの構成要素が写らないことが望ましい。このため、軸受Xのこれらの構成要素(外輪X1、内輪X2、玉X3、保持器X4及びシールX5)は、中性子線L1の吸収率が低いアルミニウム材料から形成されていることが好ましい。
【0032】
次に、上述のように構成された本実施形態の潤滑剤分布取得装置1の動作(潤滑剤分布取得方法)について説明する。なお、以下に説明する本実施形態の潤滑剤分布取得装置1の動作の主体は、制御装置11である。
【0033】
まず、制御装置11は、回転駆動装置4に軸受Xを回転駆動させる。この結果、軸受Xの内輪X2が回転駆動されて内輪X2と外輪X1との間に挟まれた玉X3が自転しながら、軸心を中心として公転し、潤滑剤Yが玉X3の移動に伴って軸受X内部を移動する。
【0034】
このように軸受Xが回転駆動されると、ロータリエンコーダ5から回転角度信号であるパルス信号が制御装置11に入力される。
制御装置11は、当該パルス信号からゲート信号及びトリガ信号を生成し、ゲート信号を光増幅器8に入力し、トリガ信号を撮像装置9に入力する。
この結果、撮像装置9は常に軸受Xの回転角度に同期して撮像を行い、光増幅器8は撮像装置9で撮像されるタイミングに合わせて光L2を増幅するようになる。
【0035】
そして、中性子線照射装置2にて中性子線L1が案内されると、図1(a)に示すように、中性子線L1が軸受Xの軸心方向から軸受Xに入射すると、軸受Xを透過した中性子線L1がシンチレータ6に入射する。
【0036】
このようにシンチレータ6に中性子線L1がシンチレータ6に入射すると、シンチレータ6が中性子線L1の強度分布と同様の強度分布を有する光L2を発光する。つまり、シンチレータ6は、中性子線L1を光L2に変換して射出する。
【0037】
シンチレータ6から射出された光L2は、導光機構7に案内されて光増幅器8にて増幅された後、撮像装置9に入射する。
そして、制御装置11は、撮像装置9に撮像を行わせる。この結果、撮像装置9にて撮像データが取得される。
【0038】
続いて制御装置11は、信号処理部10に撮像データを加工等させることによって、軸心を中心とする半径方向における潤滑剤の分布情報及び軸心方向の潤滑剤の厚み分布情報を含む潤滑剤分布データを算出させる。
また、信号処理部10は、算出した潤滑剤分布データをロータリエンコーダ5の検出結果と関連付ける処理を行ったりする。この結果、潤滑剤分布データは、軸受Xの回転角度に関連付けられて出力されることとなる。
【0039】
ここで、潤滑剤Yは有機物からなり軸受Xよりも中性子線の吸収率が高い。このため、軸受Xを透過した中性子線L1は、潤滑剤Yが存在する領域で大きく減衰する。一方で、中性子線L1の強度分布と当該中性子線L1が変換された光L2の強度分布とは比例する。
したがって、軸受Xに対して軸心方向から中性子線L1が入射し、軸受Xを透過した中性子線L1を光L2に変換して撮像することによって、撮像データの明るさの分布から軸心を中心とする半径方向における潤滑剤Yの分布を取得することができる。
【0040】
また、中性子線L1の減衰量は、通過領域における潤滑剤Yの厚みに比例する。つまり、通過領域における潤滑剤Yの厚みが厚い程、中性子線L1の減衰量が大きくなって当該領域における中性子線L1の強度が低下する。一方で、中性子線L1の強度分布と当該中性子線L1が変換された光L2の強度分布とは比例する。したがって、軸受Xに対して軸心方向から中性子線L1が入射し、軸受Xを透過した中性子線L1を光L2に変換して撮像することによって、撮像データの明るさ分布から軸心方向の潤滑剤の厚み分布を取得することができる。
【0041】
そして、本実施形態の潤滑剤分布取得装置1及び潤滑剤分布取得方法においては、軸受Xに対して軸心方向から入射して透過した中性子線L1を光L2に変化し、当該光L2を受光して撮像することにより軸受X内部における潤滑剤Yの分布を示す潤滑剤分布データを取得する。
このため、本実施形態の潤滑剤分布取得装置1及び潤滑剤分布取得方法によれば、軸受Xを分解することなく、軸心を中心とする半径方向における潤滑剤Yの分布及び軸心方向の潤滑剤Yの厚み分布を含む潤滑剤分布データを取得することができ、軸受X内部における潤滑剤Yの挙動を詳細に取得することが可能となる。
【0042】
以上のような本実施形態の潤滑剤分布取得装置1及び潤滑剤分布取得方法によれば、 ロータリエンコーダ5から出力される軸受Xの回転角度を示す信号である回転角度信号に基づいて撮像が行われる。
このため、軸受Xにおいて回転速度の不均一性や経時変化が生じた場合であっても、常に正確に軸受Xの回転角度に合わせて撮像を行うことができる。
したがって、撮像データごとの回転角度ピッチを均一とすることが可能で、軸受X内部における潤滑剤の挙動を正確に取得することが可能となる。
【0043】
なお、本実施形態の潤滑剤分布取得装置1においては、図4に示すように、1つのみが材質の異なった(中性子線吸収率の異なった)玉X3A(転動体)を備える軸受けXAを設置するようにしても良い。
【0044】
このような軸受XAを設置することによって、撮像データにおいて玉X3Aを他の玉X3と区別することができる。
また、玉X3及び玉X3Aは、軸受Xが回転駆動されることによって、軸受Xの内部にて公転する。そして公転量は、玉X3及び玉X3Aに作用する摩擦力等によって計算することができる。したがって、本実施形態の潤滑剤分布取得装置1によれば、撮像データごとの回転角度ピッチを均一とすることができるため、この回転角度ピッチから玉X3及び玉X3Aの公転量を正確に算出することができる。
このため、例えば、複数の撮像データを取得し、信号処理部10に回転角度ピッチから玉X3及び玉X3Aの公転量を算出させ、実際の撮像データにおける玉X3及び玉X3Aの位置と比較させることで、玉X3及び玉X3Aの滑り量を算出させることができる。
【0045】
このように、本実施形態の潤滑剤分布取得装置1によれば、1つの玉X3Aが他の玉X3と中性子線吸収率が異なる軸受XAを用いることによって、玉X3及び玉X3Aの滑り量を算出することができる。
【0046】
なお、中性子線吸収率の異なる玉X3Aは必ずしも1つである必要はなく、複数であっても良い。
また、玉X3A全体の中性子吸収率を変化させる必要もなく、例えば、玉X3Aの一部の材質を変化させることによって玉X3Aの中性子吸収率を変化させるようにしても良い。玉X3Aの一部の材質は、例えば鉄、アルミニウム、セラミック等から適宜選べば良い。
【0047】
以上、添付図面を参照しながら本発明の好適な実施形態について説明したが、本発明は、上記実施形態に限定されないことは言うまでもない。上述した実施形態において示した各構成部材の諸形状や組み合わせ等は一例であって、本発明の趣旨から逸脱しない範囲において設計要求等に基づき種々変更可能である。
【0048】
例えば、上記実施形態においては、本発明のエンコーダとして、インクリメンタルエンコーダを用いる構成について説明した。
しかしながら、本発明は、これに限定されるものではなく、例えば、アブソリュートエンコーダ等の他のエンコーダを用いることも可能である。
【0049】
例えば、回転駆動装置において、歯付きのプーリや歯付きのベルトを用いることもできる。また、スプロケットとチェーンを用いることも可能である。
【0050】
また、上記実施形態においては、軸受Xがラジアル方向に荷重を受ける玉軸受である構成について説明した。
しかしながら、本発明は、例えば、コロ軸受、滑り軸受、またはスラスト方向に荷重を受ける軸受等の他の軸受内部における潤滑剤の挙動の取得に用いることも可能である。
【0051】
また、上記実施形態においては、中性子線L1が軸心方向から軸受を透過する構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、中性子線L1が軸心に対して斜め方向から軸受を透過する構成を採用することも可能である。
【0052】
また、上記実施形態においては、シンチレータ6を用いて中性子線L1を光L2に変換する構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、中性子線L1をγ線等の放射線(電磁波)に変換して撮像するようにしても良い。
【0053】
また、上記実施形態においては、撮像装置9でデジタル撮影を行う構成について説明した。
しかしながら、本発明はこれに限定されるものではなく、撮像装置でフィルム撮影を行っても良い。
【0054】
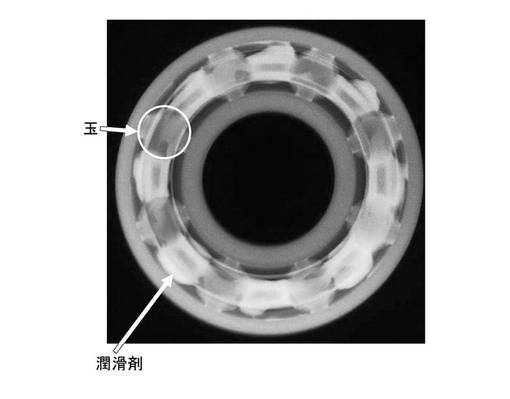
なお、上述のように中性子線L1をγ線に変換してフィルム撮影を行った結果、図5に示すような画像が撮像された。
このような撮像結果から分かるように、本発明によれば、軸受の内部を撮像することができる。
【符号の説明】
【0055】
1……潤滑剤分布取得装置、2……中性子線照射装置、4……回転駆動装置、5……ロータリエンコーダ(エンコーダ)、6……シンチレータ(電磁波変換手段)、8……光増幅器(電磁波増幅手段)、9……撮像装置(撮像手段)、10……信号処理部、11……制御装置、L1……中性子線、L2……光(電磁波)、X,XA……軸受、Y……潤滑剤
【特許請求の範囲】
【請求項1】
軸受を透過した中性子線を受けて電磁波に変換する電磁波変換手段と、
前記電磁波変換手段から射出される電磁波を受けて撮像することにより前記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得する撮像処理手段と、
前記軸受の回転角度を示す回転角度信号を出力するエンコーダと、
前記回転角度信号に基づいて前記撮像処理手段による撮像タイミングを制御する制御手段と
を備えることを特徴とする潤滑剤分布取得装置。
【請求項2】
前記電磁波変換手段から射出された電磁波を前記撮像処理手段に到達する前に増幅する電磁波増幅手段を備え、
前記制御手段は、前記撮像タイミングに合わせて前記電磁波増幅手段に前記電磁波を増幅させる
ことを特徴とする請求項1記載の潤滑剤分布取得装置。
【請求項3】
前記撮像処理手段における露光期間の開始タイミングが、前記電磁波増幅手段における前記電磁波の増幅開始タイミングよりも前記電磁波増幅手段における残像期間以上遅れて設定されていることを特徴とする請求項2記載の潤滑剤分布取得装置。
【請求項4】
軸受が少なくとも1つの転動体が他の転動体と中性子線吸収率が異なる材料である転がり軸受とされ、
前記制御手段は、予め定められた設定回転角度で前記撮像処理手段に撮像させることで複数の撮像データを取得させると共に、前記撮像処理手段に複数の撮像データを用いて前記転動体の滑り量を算出させる
ことを特徴とする請求項1〜3いずれかに記載の潤滑剤分布取得装置。
【請求項5】
軸受を透過した中性子線を電磁波に変換し、エンコーダから出力される軸受の回転角度を示す回転角度信号に基づいて前記電磁波を受けて撮像することにより前記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得することを特徴とする潤滑剤分布取得方法。
【請求項1】
軸受を透過した中性子線を受けて電磁波に変換する電磁波変換手段と、
前記電磁波変換手段から射出される電磁波を受けて撮像することにより前記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得する撮像処理手段と、
前記軸受の回転角度を示す回転角度信号を出力するエンコーダと、
前記回転角度信号に基づいて前記撮像処理手段による撮像タイミングを制御する制御手段と
を備えることを特徴とする潤滑剤分布取得装置。
【請求項2】
前記電磁波変換手段から射出された電磁波を前記撮像処理手段に到達する前に増幅する電磁波増幅手段を備え、
前記制御手段は、前記撮像タイミングに合わせて前記電磁波増幅手段に前記電磁波を増幅させる
ことを特徴とする請求項1記載の潤滑剤分布取得装置。
【請求項3】
前記撮像処理手段における露光期間の開始タイミングが、前記電磁波増幅手段における前記電磁波の増幅開始タイミングよりも前記電磁波増幅手段における残像期間以上遅れて設定されていることを特徴とする請求項2記載の潤滑剤分布取得装置。
【請求項4】
軸受が少なくとも1つの転動体が他の転動体と中性子線吸収率が異なる材料である転がり軸受とされ、
前記制御手段は、予め定められた設定回転角度で前記撮像処理手段に撮像させることで複数の撮像データを取得させると共に、前記撮像処理手段に複数の撮像データを用いて前記転動体の滑り量を算出させる
ことを特徴とする請求項1〜3いずれかに記載の潤滑剤分布取得装置。
【請求項5】
軸受を透過した中性子線を電磁波に変換し、エンコーダから出力される軸受の回転角度を示す回転角度信号に基づいて前記電磁波を受けて撮像することにより前記軸受内部における潤滑剤の分布を示す潤滑剤分布データを取得することを特徴とする潤滑剤分布取得方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−189456(P2012−189456A)
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願番号】特願2011−53438(P2011−53438)
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
【公開日】平成24年10月4日(2012.10.4)
【国際特許分類】
【出願日】平成23年3月10日(2011.3.10)
【出願人】(000000099)株式会社IHI (5,014)
【Fターム(参考)】
[ Back to top ]