
点検システム
【課題】 安価で正確に点検することができるシステムを提供する。
【解決手段】
点検システムは、遠隔操作されるロボット1(移動体)と、ロボット1に設置されたビデオカメラ15と、ロボットから離れて配されるディスプレイ22とを備えている。ロボット1には、第1、第2のレーザービームLBL,LBRを同一平面Pに沿って平行に発射する第1、第2のレーザーポインタ18L、18R(レーザー発射器)が設けられている。第1、第2の指標画像ZL,ZRがディスプレイ22に表示される。ユーザーは、第1、第2のレーザービーム像TL、TRが、第1、第2の指標画像ZL,ZRに入るようにロボット1を遠隔操作し、これにより、ビデオカメラ15の光軸15aと第1、第2レーザービームLBL,LBRを平坦な対象面と直交させる。
【解決手段】
点検システムは、遠隔操作されるロボット1(移動体)と、ロボット1に設置されたビデオカメラ15と、ロボットから離れて配されるディスプレイ22とを備えている。ロボット1には、第1、第2のレーザービームLBL,LBRを同一平面Pに沿って平行に発射する第1、第2のレーザーポインタ18L、18R(レーザー発射器)が設けられている。第1、第2の指標画像ZL,ZRがディスプレイ22に表示される。ユーザーは、第1、第2のレーザービーム像TL、TRが、第1、第2の指標画像ZL,ZRに入るようにロボット1を遠隔操作し、これにより、ビデオカメラ15の光軸15aと第1、第2レーザービームLBL,LBRを平坦な対象面と直交させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、床下基礎等の対象物を点検するシステムに関する。
【背景技術】
【0002】
特許文献1に開示された点検システムでは、ロボット(移動体)を遠隔操作して床下空間を走行させ、ロボットに搭載されたビデオカメラからの映像をロボットから離間したディスプレイの画面上に映し出すことにより、床下のコンクリート製基礎(対象物)を点検するようになっている。
【0003】
ユーザーは上記映像を観察し、基礎に生じたクラックを発見した場合には、ディスプレイ画面に上記クラックとともにスケール像を表示させる。このスケール像は、異なる線幅の複数の線と、各線に付された線幅寸法を表す数値を含んでいる。ユーザーは、クラックとスケール像の線を比較することにより、クラックの溝幅を決定する。
【0004】
ディスプレイ画面上でのクラックの溝幅は、上記ビデオカメラと上記基礎の壁面との間の離間距離により変化する。そこで、この離間距離に応じて、クラックの映像とスケール像のいずれか一方を拡大または縮小することにより、スケール像が上記壁面における実際の寸法を正確に表すようにしている。
【0005】
また、上記ビデオカメラの光軸が壁面と直交していない場合には、上記クラックの画面上での溝幅が実際より狭く映し出されてしまう。そこで、上記ビデオカメラの光軸が壁面と直交するまでロボットの壁面に対する位置を調整してから、クラックの溝幅の測定を行なったり、上記光軸と壁面の角度に応じて、上記クラック画像とスケール画像のいずれか一方を、拡大又は縮小させることにより、補償している。
【0006】
上述したように、クラックの溝幅を正確に計測するためには、上記ビデオカメラと壁面までの離間距離と、ビデオカメラの光軸と壁面とのなす角度の情報を得る必要があるが、特許文献1では2つの手段を提案している。
第1の手段では、ビデオカメラをパン方向に所定の角度範囲にわたって回動させ、複数の角度位置において、ビデオカメラのフォーカス値を測定し、このフォーカス値から、ビデオカメラの光軸に沿ったビデオカメラと壁面との離間距離を演算し、これら異なる角度位置での離間距離情報に基づいて、壁面に対するビデオカメラの光軸の角度も演算する。
第2の手段では、ロボットに距離センサを搭載し、この距離センサにより、複数の角度位置におけるロボットと壁面との離間距離(すなわちビデオカメラと壁面までの離間距離)を演算し、さらにこれら離間距離情報から壁面に対するビデオカメラの光軸の角度を演算する。
【0007】
他方、特許文献2には、ビデオカメラを搭載したロボットを遠隔操作するシステムにおいて、ビデオカメラの光軸を壁面と直交させた状態でロボットと壁面との間の離間距離を測定するシステム(但し、対象物を点検するためのものではない)が開示されている。このシステムでは、ロボットに3つのレーザーポインタが搭載される。3つのレーザーポインタは同一水平面において等しい間隔で配置されており、互いに平行をなす3つのレーザービームをロボットの正面から水平に発射するようになっている。ディスプレイには、壁面における3つのレーザービーム像が一直線上に映し出される。
【0008】
上記特許文献2のシステムにおいて、上記3つのレーザービーム像の間隔を画面のピクセル数を計数することにより算出し、この間隔が等しくなるように、ロボットの位置を制御する。特許文献2には明示されていないが、この位置制御は、上記のようにして算出した間隔のフィードバック情報に基づいて、自動的に行うようである。
上記のようにしてレーザービーム像の間隔を等しくすることにより、ロボットは壁面に対して真正面を向く(ビデオカメラの光軸が壁面と直交する)。この状態で、上記画面上のレーザービーム像の間隔から、ロボットと壁面との離間距離を演算する。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−85785号公報
【特許文献2】特開2004−37440号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記特許文献1のシステムにおいては、壁面までの距離を求めるのに、カメラの自動フォーカス機構を利用する方法や距離センサを用いる方法を利用している。自動フォーカス機構で距離を求めるには専用の高度なソフトウエアが必要であるし、距離センサは高価であるため、システム全体のコストが大幅に増大してしまう。
上記特許文献2のシステムでは、パソコン等の演算手段により、画面上における3つのレーザービーム像を認識して各像のピクセル位置を確定し、像間のピクセル数を算出することにより、壁面に対するロボットの姿勢を認識し、ロボットが壁面に対して真正面になるように自動制御するため、専用の高度なソフトウエアが必要になってしまう。
【課題を解決するための手段】
【0011】
本発明は、上記課題を克服するためになされたものであり、移動体と、上記移動体に設置されたビデオカメラと、上記移動体から離れて配されるディスプレイと、上記移動体を遠隔操作する操作手段と、上記ビデオカメラで撮影した映像を上記ディスプレイに表示させる表示制御手段とを備えた点検システムにおいて、
さらに、上記移動体に設けられた第1、第2のレーザー発射器を備え、これら第1、第2のレーザー発射器は、それぞれ第1、第2のレーザービームを同一平面に沿って平行に発射するようになっており、
上記表示制御手段は、上記ビデオカメラがその光軸を上記第1、第2レーザービームと平行にした状態で撮影した映像とともに、第1、第2の指標画像を上記ディスプレイに表示させ、
上記ディスプレイ画面上の互いに直交する第1、第2座標軸の少なくとも一方に関して、上記第1、第2の指標画像の中心位置は、上記ビデオカメラの光軸と上記第1、第2レーザービームが平坦な対象面と直交するとともに上記ビデオカメラから上記対象面までの離間距離が設定距離であった時に上記ディスプレイ画面上に現れる上記第1、第2レーザービーム像の中心位置と、一致することを特徴とする。
【0012】
上記構成によれば、レーザービームを発射するだけの安価なレーザー発射器を用いるので、点検システムのコストを低減させることができる。
また、ディスプレイ画面に表示された第1、第2の指標画像を利用して、移動体を手動操作により容易かつ正確に位置調節することができる。より具体的には、第1、第2のレーザービーム像を第1、第2の指標画像にそれぞれ合わせるように移動体を遠隔操作することにより、ビデオカメラの光軸を平坦な対象面と直交させるとともに、ビデオカメラを対象面に対して予め設定された離間距離に位置させることができ、その結果、正確な点検を行うことができる。
【0013】
好ましくは、上記第1、第2の指標画像は、上記少なくとも一方の座標軸方向に、上記設定距離の許容範囲に対応する広がりを有する。
この構成によれば、第1、第2の指標画像が許容範囲も現しているので、移動体の位置調節がより一層容易になる。
【0014】
好ましくは、上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置しており、上記ディスプレイ画面の第1座標軸が、上記第1、第2レーザービームの離間方向に対応しており、上記第1、第2の指標画像は、上記第1座標軸に関して上記画面の中央から互いに逆向きに等しい距離だけ離れており、上記第1座標軸方向に上記設定距離の許容範囲に対応する広がりを有している。
この構成によれば、ユーザーは、画面中央を挟んで表示された(例えば左右に表示された)第1、第2の指標画像を見ながら、容易に移動体の位置調節を行うことができる。
【0015】
好ましくは、上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置するとともに、上記平面から離れており、上記ディスプレイ画面の第1座標軸が、上記第1、第2レーザービームの離間方向に対応しており、上記第1、第2の指標画像は、上記第2座標軸方向に関して上記画面の中央から同方向に等しい距離だけ離れており、上記第2座標軸方向に上記設定距離の許容範囲に対応する広がりを有している。
この構成によれば、ユーザーは、画面中央から同距離だけ離れて表示された(例えば同じ高さに表示された)第1、第2の指標画像を見ながら、容易に移動体の位置調節を行うことができる。
【0016】
好ましくは、上記第1、第2の指標画像は、上記第1座標軸方向において、上記画面の中央から互いに逆向きに等しい距離だけ離れており、上記第1座標軸方向にも上記設定距離の許容範囲に対応する広がりを有する。
この構成によれば、第1、第2座標軸によって中心を定められた第1、第2指標画像を見ながら、より一層容易に移動体の位置調節を行うことができる。
【0017】
好ましくは、上記表示制御手段は、上記ビデオカメラから上記対象面までの離間距離が上記設定距離である時に用いられるべき所定尺度のスケールを、ディスプレイ画面上に表示する。
この構成によれば、ユーザーがディスプレイ画面上に現れたスケールを見ながら、対象面の特定部位の寸法、例えばクラックの溝幅や長さを目で確認することができる。しかもこのスケールの尺度は予め決定されているため、ソフトウエアの負担を最小限にすることができる。この場合、ズーム倍率に応じてスケール尺度を調節できるようにしてもよい。
【0018】
好ましくは、上記演算手段は、上記ディスプレイ画面上において上記第1、第2のレーザービーム像が上記第1、第2の指標画像内にそれぞれ入っている時に、画面上での第1、第2レーザービーム像の離間距離に基づいて、スケールの尺度を演算し、上記表示制御手段は、上記ディスプレイ画面上に、上記演算された尺度のスケールを表示する。
これによれば、ソフトウエアの負担が増えるが、正確な尺度のスケールを参照しながら対象面の特定部位の寸法をより高精度に知ることができる。
【0019】
好ましくは、さらに演算手段を備え、この演算手段は、上記ディスプレイ画面上において上記第1、第2のレーザービーム像が上記第1、第2の指標画像内にそれぞれ入っている時に、ユーザー入力により指定された画面上での特定部位の2点の位置に基づき、上記対象面の特定部位の2点間距離を演算する。
この構成によれば、簡単かつ正確に特定部位の実際の寸法を求めることができる。
【0020】
好ましくは、さらに、上記移動体に設けられた傾斜センサと、傾斜判断手段を備え、この傾斜判断手段は、上記傾斜センサで検出された移動体の傾斜角度が閾値以内であれば、対象面に対する移動体の位置調節を許容する信号を発し、閾値を越えた時には当該位置調節を禁じる信号を発する。
これによれば、移動体の傾斜が大きいため移動体の位置調節が不正確になる場合には、この位置調節作業を禁じることができる。
【発明の効果】
【0021】
本発明によれば、容易かつ正確な点検を行うことができるシステムを安価に提供することができる。
【図面の簡単な説明】
【0022】
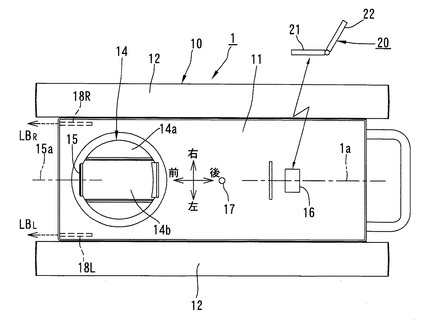
【図1】床下コンクリート製基礎のクラックを測定するために用いられる、本発明の一実施形態に係わる点検システムの概略図であり、ロボットの平面図を含む。
【図2】上記ロボットの側面図である。
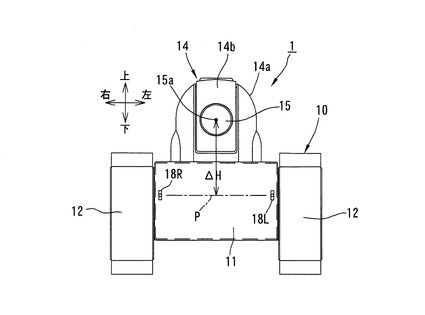
【図3】上記ロボットを前方から見た正面図である。
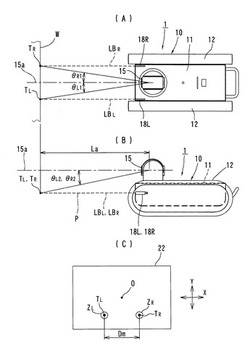
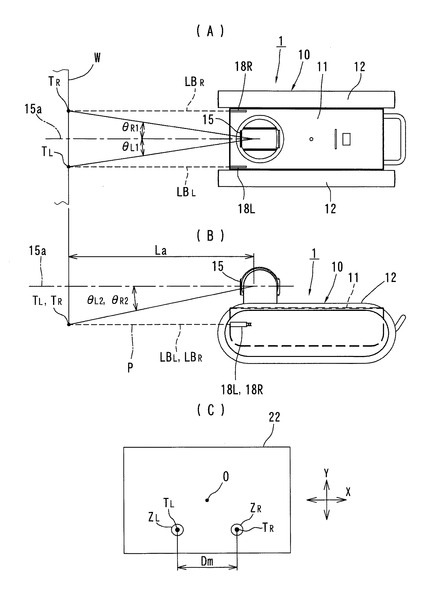
【図4】上記ロボットの中心軸線およびこのロボットに搭載されたビデオカメラの光軸が上記床下基礎の壁面に対して傾いている場合の作用を説明するもので、(A)はロボットの平面図、(B)はロボットの側面図、(C)はディスプレイの画面をそれぞれ示す。
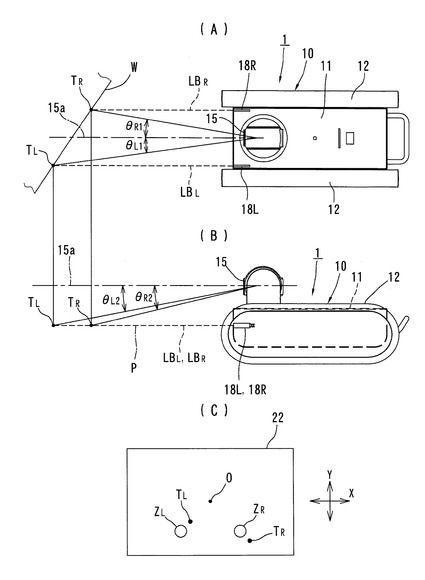
【図5】ビデオカメラの光軸が上記床下基礎の壁面に対して直交するとともに、壁面に対して設定距離だけ離間している場合の作用を説明するもので、(A)はロボットの平面図、(B)はロボットの側面図、(C)はディスプレイの画面をそれぞれ示す。
【図6】ビデオカメラの光軸が床下基礎の壁面と直交するものの、上記基礎壁面とビデオカメラの間の距離が設定距離より遠い場合の、ディスプレイの画面を示す図である。
【図7】ビデオカメラの光軸が床下基礎の壁面と直交するものの、上記基礎壁面とビデオカメラの間の距離が設定距離より近い場合の、ディスプレイの画面を示す図である。
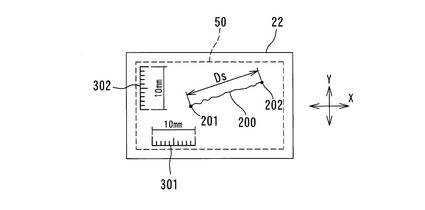
【図8】床下基礎の壁面に形成されたクラックとスケール像が表示された、ディスプレイの画面を示す図である。
【図9】上記点検システムにおいて実行される制御ルーチンを示すフローチャートである。
【図10】スケール像の変形例を示す図である。
【図11】本発明の第2実施形態を示すロボットの側面図である。
【図12】本発明の第3実施形態を示すロボットの側面図である。
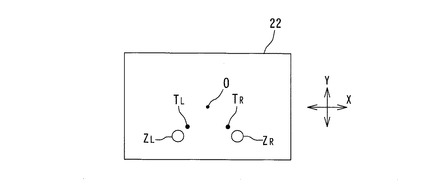
【図13】本発明の第4実施形態において、レーザービーム像と指標画像が表示されたディスプレイ画面を示すもので、(A)はビデオカメラの光軸が基礎の壁面に対して傾いている場合を示し、(B)はビデオカメラが壁面に対して遠い場合を実線で示し、近い場合を破線で示し、(C)はビデオカメラが壁面に対して真正面を向き、壁面からの距離が設定距離にある場合を示す。
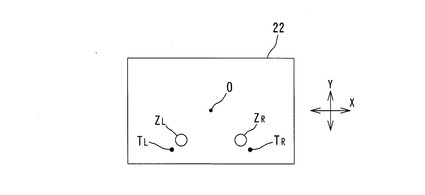
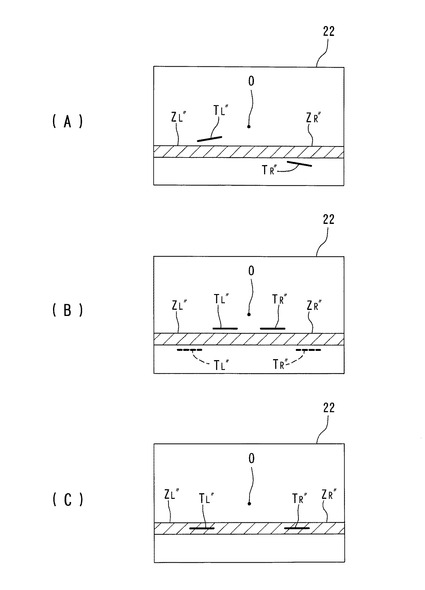
【図14】本発明の第5実施形態において、レーザービーム像と指標画像が表示されたディスプレイ画面を示すもので、(A)はビデオカメラの光軸が基礎の壁面に対して傾いている場合を示し、(B)はビデオカメラが壁面に対して遠い場合を実線で示し、近い場合を破線で示し、(C)はビデオカメラが壁面に対して真正面を向き、壁面からの距離が設定距離にある場合を示す。
【発明を実施するための形態】
【0023】
以下、床下のコンクリート製基礎(対象物)のクラックの長さや溝幅を測定するために用いられる、本発明の一実施形態に係わる点検システムについて図面を参照しながら説明する。
説明の便宜上、図1〜図3において、ロボット1(移動体)の左右、前後、上下を明示する。
【0024】
図1に示すように、点検システムは、ロボット1と、ノート型パソコン20とを備えている。
【0025】
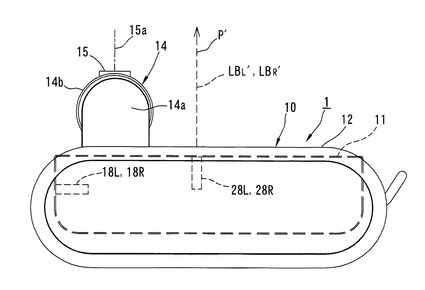
最初に、図1〜図3を参照しながら、ロボット1の構成について説明する。ロボット1は軽量小型であり、その主要部10は前後方向に細長いボデイ11と、このボデイ11の左右に設けられた一対のクローラ12とを有している。図1においてロボット1の前後方向に延びる中心軸線を符号1aで示す。
上記一対のクローラ12は個別に制御されるので、ロボット1は、前後の直線的移動のみならず、超信地旋回(位置を変えずにその場での旋回)も可能である。
【0026】
上記ボデイ11の上面前部の左右幅方向の中央(平面視で上記中心軸線1a上)には、回動機構14を介してビデオカメラ15が設置されている。回動機構14は、図示しないモータによりボデイ11に対してパン回動(垂直軸を中心に水平回動)する第1回動体14aと、図示しない他のモータにより第1回動体14aに対してチルト回動(水平軸を中心に上下回動)する第2回動体14bとを有している。この第2回動体14bに上記ビデオカメラ15が設けられている。
【0027】
上記ボデイ11には、図1に示すように、送受信機16と、傾斜センサ17が設置されている。傾斜センサ17はロボット1の前後の傾斜角度、左右の傾斜角度を検出する。
【0028】
上記ボデイ11の前端面には、左右一対のレーザーポインタ18L,18R(第1、第2のレーザー発射器)が設けられている。
上記レーザーポインタ18L,18Rは、移動体10の接地面から所定高さの同一水平面P上に配置され、それらの光軸は、上記水平面P上に位置し、上記移動体10の中心軸線1aと平行をなすとともに、互いに平行をなしている。
レーザーポインタ18L,18Rは、移動体10の中心軸線1aに対して左右方向に等しい距離だけ離れている。
【0029】
図1〜3に示すように上記ビデオカメラ15が真正面を向いた時(ビデオカメラ15の光軸15aとロボット1の中心軸線1aが平行をなして、ロボット1の前方を向いた時)、その光軸15aは上記レーザーポインタ18L,18Rの光軸と平行をなし、上記レーザーポインタ18L,18Rが配置された水平面Pから離れている。ビデオカメラ15の光軸15aと水平面Pの高低差(離間距離)を図2、図3においてΔHで示す。
【0030】
他方、図1に示すようにパソコン20は、本体21と、ディスプレイ22と、図示しない送受信機を備えており、この送受信機と上記ロボット1の送受信機16との間で、無線による信号伝送が行われるようになっている。具体的には、パソコン20からロボット1に、クローラ12を走行させるための操作信号、ビデオカメラ15のパン、チルト回動のための操作信号、レーザーポインタ18L,18Rのオン、オフ信号が送られる。これとは逆に、ビデオカメラ15の映像信号や傾斜センサ17の検出信号が、パソコン20に送られる。なお、上記信号伝送は有線で行ってもよい。
【0031】
上記パソコン20の本体21は、後述する作用から明らかなように、操作手段、映像等を表示するための表示制御手段、傾斜判断手段、種々の演算を行う演算手段を実質的に備えている。
【0032】
上記構成をなす点検システムを用いて床下のコンクリート製の基礎Wを点検し、この基礎Wに生じたクラック(特定部位)の長さや溝幅を測定する。この作用を図4〜図9を参照しながら詳述する。なお、基礎Wは垂直の平坦な壁面(対象面)を有している。
【0033】
上記ビデオカメラ15で撮影された映像信号は、パソコン20の本体21に送られ、ディスプレイ22で表示される。上記ビデオカメラ15の光軸15a上の映像は、図4(C)に示すように、ディスプレイ22の画面の中心Oに現れる。
図4(C)においてディスプレイ22の画面において左右方向に延びる軸をX座標軸(第1座標軸)とし、上下方向に延びる軸をY座標軸(第2座標軸)とする。画面上のX座標軸は左右方向(レーザーポインタ18L,18Rの離間方向)に対応し、Y座標軸は垂直方向(上記水平面Pと直交する方向)に対応する。
【0034】
ユーザーは、本体21のキー操作(別体をなすリモートコントローラの操作でもよい)により、ロボット1の左右のクローラ12を遠隔制御することにより、ロボット1を床下空間において移動させ、数箇所で停止させ、各停止位置でビデオカメラ15をパン回動させながら、ディスプレイ22の画面に映し出された映像を見て基礎Wの状態を点検する。
【0035】
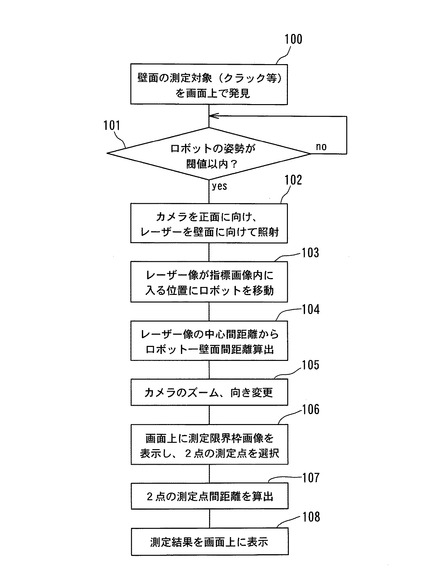
次に、図9のフローチャートを参照しながら、クラック長さ測定のための工程を順を追って説明する。なお、図9のフローチャートでは、ユーザーの手動による制御の工程と、パソコン20の本体21での制御・演算の工程が混在して示されている。
【0036】
ユーザーは、点検の際にクラックを発見したら(ステップ100)、画面上に測定OKかNGかの表示(図示しない)を見る(ステップ101)。パソコン20の本体21では、傾斜センサ17で検出された前後方向の傾斜角度と左右方向の傾斜角度をそれぞれ閾値と比較し、これら傾斜角度が閾値以内であると判断した時にはディスプレイ22の画面に測定OKの表示(測定許容信号の出力)をし、少なくともいずれか一方の傾斜角度が閾値を超えていると判断した時には、測定NG(測定禁止信号の出力)の表示をする。
【0037】
上記ステップ101において、上記本体21は、上記閾値以内と判断した時には測定OKの表示の代わりに、以下に説明する工程を許容する処理(測定許容信号の出力)をし、閾値を超えていると判断した時には測定NGの表示の代わりに、以下に説明する工程を禁じる処理(測定禁止信号の出力)をしてもよい。
なお、ステップ101において、ユーザー自身がディスプレイ22に表示された傾斜角度と閾値とを比較して、今後の工程を進めるか否かの判断をしてもよい。
【0038】
上記ステップ101で測定OK(傾斜角度が閾値以内)と判断した場合には、ステップ102に進む。このステップ102では、ユーザーが入力した指令信号に基づく自動制御により、ビデオカメラ15をロボット1の真正面に向け、レーザーポインタ18L,18RをONする。
【0039】
上記レーザーポインタ18L,18RがONすると、図4(A)に示すように、それぞれ互いに平行をなす例えば赤色(壁面と異なる色)のレーザービームLBL,LBRを上記移動体10の前方へ水平面Pに沿って発射する。本実施形態ではレーザービームLBL,LBRの断面は円形であるが、楕円、矩形、十字形等であってもよい。
【0040】
上記レーザービームLBL,LBRが基礎Wの壁面に当たると、その反射により壁面に像TL,TRが現れる。ビデオカメラ15がこれらレーザービーム像TL,TRを撮影し、本体21がディスプレイ22の画面に表示する(図4(C)参照)。
【0041】
上記レーザービーム像TL,TRのディスプレイ22の画面上での位置は、レーザーポインタ18L,18Rと壁面との間の離間距離に応じて変わる。その理由を、図4を参照しながら説明する。
【0042】
図4(A)のレーザービームLBRのように短い距離で壁面に当たると、このレーザービーム像TRは、ビデオカメラ15の光軸15aに対して水平方向に比較的大きな角度ΘR1で離れており、その結果、図4(C)に示すようにレーザービーム像TRと画面中心OのX座標軸方向の離間距離が大きくなる。また、短い距離で壁面に当たるレーザービーム像TRは、図4(B)に示すように、ビデオカメラ15の光軸15aに対して垂直方向に比較的大きな角度ΘR2で離れており、その結果、図4(C)に示すようにレーザービーム像TRと画面中心OのY座標軸方向の離間距離も大きくなる。
【0043】
同様に、図4(A)のレーザービームLBLのように長い距離で壁面に当たると、このレーザービーム像TLは、ビデオカメラ15の光軸15aに対して水平方向に比較的小さな角度ΘL1で離れており、その結果、図4(C)に示すようにレーザービーム像TLと画面中心OとのX座標軸方向の離間距離が小さくなる。また、短い距離で壁面に当たるレーザービーム像TLは、図4(B)に示すように、ビデオカメラ15の光軸15aに対して垂直方向に比較的小さな角度ΘL2で離れており、その結果、図4(C)に示すようにレーザービーム像TLと画面中心OとのY座標軸方向の離間距離も小さくなる。
【0044】
上記説明から明らかなように、ビデオカメラ15の光軸15aが壁面と直交していない場合には、レーザーポインタ18L,18Rと壁面との距離が互いに異なり、レーザービーム像TL,TRの画面中心OからのX座標軸方向、Y座標軸方向の離間距離が異なる。この離間距離の差は、壁面の法線と光軸15aとの角度が大きくなるほど(傾斜が大きくなるほど)、大きくなる。
【0045】
他方、ビデオカメラ15の光軸15aが壁面と直交している場合には、レーザーポインタ18L,18Rと壁面との距離が互いに等しく、図5(A)、(B)に示すように、レーザービーム像TL、TRのビデオカメラ15の光軸15aに対する水平方向の角度ΘL1、ΘR1は互いに等しく、垂直方向の角度ΘL2、ΘR2も互いに等しくなる。その結果、図5(C)に示すように、レーザービーム像TL,TRの画面中心OからのX座標軸方向、Y座標軸方向の離間距離が等しくなる。
【0046】
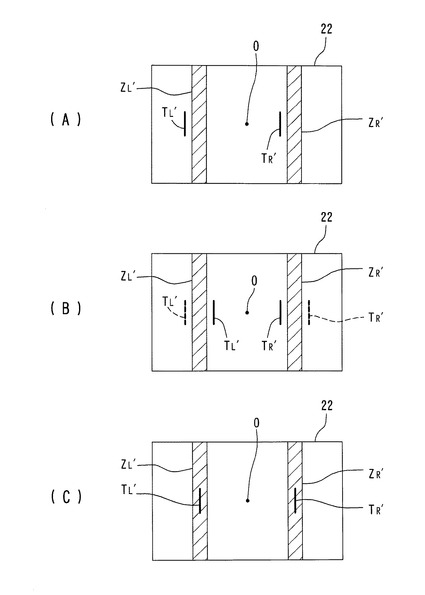
本実施形態では、上記本体21は、上記レーザーポインタ18L,18RのONとほぼ同時期に、図4(C)、図5(C)に示すように、ディスプレイ22の画面上に左右一対の指標画像ZL,ZRを表示する。これら指標画像ZL,ZRについて詳述する。
【0047】
上記説明から理解できるように、レーザーポインタ18L,18Rが互いに等しい距離だけ壁面から離間していることは、ビデオカメラ15の光軸15aとレーザービームLBL,LBRが壁面と直交していることを表す。
また、ビデオカメラ15は対象物まで所定距離だけ離間している時に光学上の特性上最も良好に撮影できる。この距離をビデオカメラ15から壁面までの最適距離として設定する。
【0048】
上記のようにビデオカメラ15が壁面から設定距離だけ離間している状況で、ディスプレイ22の画面に表示されるレーザービーム像TL,TRの中心位置が、上記指標画像ZL,ZRの中心位置として本体21に記憶されている。
【0049】
上記本体部21は、記憶された位置を中心にし、X座標軸、Y座標軸方向に広がりを持って、指標画像ZL,ZRを表示する。これらX座標軸、Y座標軸方向の広がりは、上記設定距離の許容範囲を表し、ひいてはビデオカメラ15の光軸15a(ロボット1の中心軸1a)の壁面に対する許容傾き角度を表している。すなわち、指標画像ZL,ZRは撮影および後述の測定のためのスイートスポットを表している。
なお、本実施形態では指標画像ZL,ZRは、円形であるが四角等であってもよい。
【0050】
再び図9のフローチャートに戻って説明すると、ステップ102の後、図5(C)に示すように画面上で上記レーザービーム像TL,TRが上記指標画像ZL,ZRに入るように、ユーザーの遠隔制御により、ロボット1の位置および姿勢を定める(ステップ103)。これにより、図5(A)に示すように、ビデオカメラ15の光軸15aがほぼ壁面と直交し、ビデオカメラ15と壁面との間の離間距離がほぼ撮影に最適な距離となる。
【0051】
なお、図6、図7は、壁面に対してビデオカメラ15の光軸15aが直交している時のレーザービーム像TL,TRを示しているが、図6に示す状態はビデオカメラ15と壁面が上記設定距離より遠く、図7に示す状態は上記設定距離より近い場合を示す。このような場合には、ロボット1を前進または後退させて、図5(C)に示す状態にする。
【0052】
次に、ユーザー入力による演算指令信号に応答して、本体21は画面上でのレーザービーム像TL、TRの中心間の距離Dm(図5(C)参照)を、これら像TL、TR間のピクセル数に基づき演算する。なお、このレーザービーム像TL、TRの中心位置情報は、本体21で自動検出してもよいし、ユーザーが画面上から直接入力してもよい。
【0053】
さらに、上記距離Dmから、上記ビデオカメラ15と壁面との間の実際の距離La(図5(B)参照)、ないしはロボット1と壁面との間の距離を演算する(ステップ104)。例えば、ビデオカメラ15と壁面の距離が設定距離Lxである時の画面上のレーザービーム像TL、TR間の距離をDxとすると、La=Lx・Dx/Dmの演算を行う。この距離情報Laはディスプレイ画面上に表示される。
【0054】
次に、ユーザーは ビデオカメラ15を真正面位置からチルト回動やパン回動を行って向きを調節したり、ズーミングを実行することにより、図8に示すようにクラック200を拡大して画面の中央近傍に映し出す(ステップ105)。
【0055】
次に、ユーザー入力による指令信号に応答して、本体21は画面に測定限界枠50を表示する(ステップ106)。この測定限界枠50の外では映像が歪み正確な測定が行えない。なお、測定限界枠50の表示は、上記離間距離演算の後に本体21が自動的に実行してもよい。この測定限界枠50はズーム倍率に応じて変えてもよい。
【0056】
次に、ユーザーは測定限界枠50内にクラック200が表示されていることを確認した後、カーソルを移動して、クラック200の両端201,202を指定する(ステップ106)。この際、本体21は、画面にX座標軸方向の寸法を計測するためのスケール301とY座標軸方向のスケール302を表示する。このスケール301,302の尺度は、上記レーザービーム像TL、TRの画面上での距離と、上記ズーム倍率の情報に基づいて決定する。
【0057】
次に、本体21は、上記入力されたクラック200の両端201,202間の画面上での離間距離Ds(図8参照)を演算し、これと既に演算した上記レーザービーム像TL、TRの画面上での距離Dmに基づき、クラック200の実際の長さLb(クラック200の実際の両端離間距離)を演算する(ステップ107)。例えば、レーザビームLBL,LBRの実際の間隔をLyとした時、Lb=Ly・Ds/Dmの演算を行う。なお、ズーミングを行っているときには、さらにズーム倍率で除す。
最後に、算出したクラック長さLbを画面上に表示する(ステップ108)。
なお、上記レーザービーム像TL、TRの画面上での距離Dmは、画面上のピクセル数に基づいて演算してもよいが、指標画像ZL,ZRの中心間距離(固定値)を用いてもよい。
【0058】
ソフトウエアの負担を軽くするために、図9のステップ104、106,107、108を省き、パソコン20が、図8に示すような所定尺度のスケール301,302をディスプレイ22の画面上に表示するだけでもよい。この場合のスケールの尺度は、レーザービーム像TL、TRの画面上の位置に基づき演算するものではなく固定されており、ビデオカメラ15から壁面までの離間距離が上記設定距離である時、換言すれば、レーザービーム像TL、TRの中心が指標画像ZL,ZRの中心と一致した時に、ディスプレイ22の画面上に表示されたクラック200の寸法を正確に示すことができるものである。ズーミングする場合には、このスケールの尺度をズーム倍率に応じて調節する。ユーザーは、このクラック200とスケールを見比べて、クラック200の長さを認識する。
【0059】
クラック200の溝幅寸法を計測する場合には、上述した長さ計測用のスケールとは異なるタイプのスケールが表示される。例えば図10に示すように、このスケールは、異なる線幅の複数の線と、各線に付された線幅寸法を表す数値を含んでいる。ユーザーは、スケールを移動させてクラック200の溝幅とスケール像の線幅を比較することにより、クラックの溝幅を決定する。スケールの尺度は、演算により求めてもよいし、固定されたものでもよい。この溝幅測定は、上述した実施形態および変形例や、後述する他の実施形態の全てに適用できる。
【0060】
スケール像を画面上において移動可能としてもよい。また、1つのスケールを用いて位置と傾きを変えることができるようにしてもよい。
また、自動演算する場合、スケールを表示しなくてもよい。
【0061】
次に、本発明の他の実施形態について図面を参照しながら説明する。以下に説明する実施形態において先行して説明する実施形態に対応する構成部には同番号を付してその詳細な説明を省略する。
【0062】
図11に示す第2実施形態では、天井点検用にさらに左右のレーザーポインタ28L,28Rを追加する。これらレーザーポインタ28L,28Rは垂直方向に上向きにレーザービームLBL’、LBR’を発射する。ビデオカメラ15を回動してその光軸15aを垂直にしてレーザービームLBL’、LBR’と平行にすることができる。この構成によれば、天井面のクラック(特定部位)の寸法を測定することができる。
【0063】
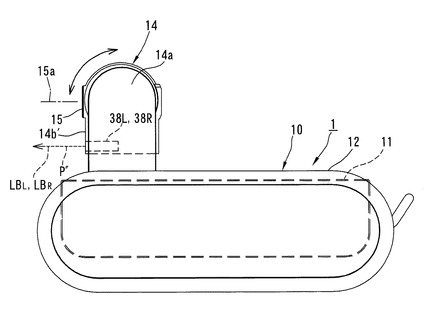
図12に示す第3実施形態では、レーザーポインタ38L,38Rが、ビデオカメラ15が固定された回動体14bに、固定される。これによれば、ビデオカメラ15の光軸15aとレーザーポインタ28L,28Rの光軸を常に平行にすることができる。
【0064】
図13に示す第4実施形態では、レーザービームが縦長の線状をなし、その像TL’、TR’が画面上縦長の線をなし、X座標軸上の位置を表示するがY座標軸上の位置を明確に示さない。
これに対応して画面には縦長の帯状の指標画像ZL’,ZR’が表示される。この指標画像ZL’,ZR’は、X座標軸に関して上記画面の中心Oから互いに逆向きに等しい距離だけ離れており、設定距離の許容範囲に対応したX座標軸方向の広がりを表している。
【0065】
上記第1、第2の指標画像ZL’,ZR’のX座標軸方向の中心位置は、上記ビデオカメラの光軸と上記第1、第2レーザービームが平坦な対象面と直交するとともに、上記第1、第2レーザー発射器から上記対象面までの離間距離が設定距離であった時に、上記ディスプレイ22の画面上に現れる上記第1、第2レーザービーム像TL’、TR’と一致する。
【0066】
上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置している。本実施形態では、ビデオカメラの光軸とレ−ザーポインタを同一高さ(同一平面)に配置しているが、第1実施形態と同様に配置してもよい。
【0067】
第4実施形態の作用を簡単に説明する。図13(A)はビデオカメラの光軸が基礎の壁面に対して傾いている場合を示し、図13(B)はビデオカメラが壁面に対して遠い場合を実線で示し、近い場合を破線で示す。上記第1、第2レーザービーム像TL’、TR’が図13(A)、(B)に示す位置に表示されている場合、ロボットを遠隔制御して図13(C)に示すように、上記第1、第2レーザービーム像TL’、TR’を第1、第2の指標画像ZL’,ZR’内に位置させる。その後の工程は第1実施形態と同様である。
【0068】
図14に示す第5実施形態では、レーザービームが横長の線状をなし、その像TL”、TR”が画・BR>ハ上横長の線をなし、Y座標軸上の位置を表示するがX座標軸上の位置を明確に示さない。
これに対応して画面には横長の帯状の指標画像ZL”,ZR”が表示される。この指標画像ZL”,ZR”は、Y座標軸に関して上記画面の中心Oから同方向に等しい距離だけ離れており、設定距離の許容範囲に対応したY座標軸方向の広がりを表している。本実施形態では指標画像ZL”,ZR”が連なって1つの帯になっているが、離れていてもよい。
ビデオカメラとレーザーポインタの配置は第1実施形態と同様である。
【0069】
第5実施形態の作用を簡単に説明する。図14(A)はビデオカメラの光軸が基礎の壁面に対して傾いている場合を示し、図14(B)はビデオカメラが壁面に対して遠い場合を実線で示し、近い場合を破線で示す。上記第1、第2レーザービーム像TL”、TR”が図14(A)、(B)に示す位置に表示されている場合、ロボットを遠隔制御して図14(C)に示すように、上記第1、第2レーザービーム像TL”、TR”を第1、第2の指標画像ZL”,ZR”内に位置させる。その後の工程は第1実施形態と同様である。
【0070】
本発明は上記実施例に制約されず、種々の態様を採用することができる。例えば、傾斜センサは前後方向の傾斜と左右方向の傾斜のいずれか一方を検出するものであってもよい。
移動体はクローラ型のみならず、車輪型のものであってもよい。
指標画像の位置に対応するビデオカメラと対象面との設定距離は、撮影に最適な距離から許容範囲内で外れていてもよい。
指標画像は線状をなしていてもよい。またレーザービーム像と同程度の大きさであってもよい。
【産業上の利用可能性】
【0071】
本発明は、床下点検システム等に適用することができる。
【符号の説明】
【0072】
1 ロボット(移動体)
15 ビデオカメラ
17 傾斜センサ
18L,18R,28L,28R,38L,38R ・・・レーザーポインタ(レーザー発射器)
20 パソコン(基地局)
21 ディスプレイ
22 本体(操作手段、表示制御手段、傾斜判断手段、演算手段)
P 水平面(レーザービームが走る平面)
LBL,LBR レーザービーム
TL,TR ,TL’,TR’,TL”,TR” レーザービーム像
ZL,ZR ,ZL’,ZR’,ZL”,ZR” 指標画像
【技術分野】
【0001】
本発明は、床下基礎等の対象物を点検するシステムに関する。
【背景技術】
【0002】
特許文献1に開示された点検システムでは、ロボット(移動体)を遠隔操作して床下空間を走行させ、ロボットに搭載されたビデオカメラからの映像をロボットから離間したディスプレイの画面上に映し出すことにより、床下のコンクリート製基礎(対象物)を点検するようになっている。
【0003】
ユーザーは上記映像を観察し、基礎に生じたクラックを発見した場合には、ディスプレイ画面に上記クラックとともにスケール像を表示させる。このスケール像は、異なる線幅の複数の線と、各線に付された線幅寸法を表す数値を含んでいる。ユーザーは、クラックとスケール像の線を比較することにより、クラックの溝幅を決定する。
【0004】
ディスプレイ画面上でのクラックの溝幅は、上記ビデオカメラと上記基礎の壁面との間の離間距離により変化する。そこで、この離間距離に応じて、クラックの映像とスケール像のいずれか一方を拡大または縮小することにより、スケール像が上記壁面における実際の寸法を正確に表すようにしている。
【0005】
また、上記ビデオカメラの光軸が壁面と直交していない場合には、上記クラックの画面上での溝幅が実際より狭く映し出されてしまう。そこで、上記ビデオカメラの光軸が壁面と直交するまでロボットの壁面に対する位置を調整してから、クラックの溝幅の測定を行なったり、上記光軸と壁面の角度に応じて、上記クラック画像とスケール画像のいずれか一方を、拡大又は縮小させることにより、補償している。
【0006】
上述したように、クラックの溝幅を正確に計測するためには、上記ビデオカメラと壁面までの離間距離と、ビデオカメラの光軸と壁面とのなす角度の情報を得る必要があるが、特許文献1では2つの手段を提案している。
第1の手段では、ビデオカメラをパン方向に所定の角度範囲にわたって回動させ、複数の角度位置において、ビデオカメラのフォーカス値を測定し、このフォーカス値から、ビデオカメラの光軸に沿ったビデオカメラと壁面との離間距離を演算し、これら異なる角度位置での離間距離情報に基づいて、壁面に対するビデオカメラの光軸の角度も演算する。
第2の手段では、ロボットに距離センサを搭載し、この距離センサにより、複数の角度位置におけるロボットと壁面との離間距離(すなわちビデオカメラと壁面までの離間距離)を演算し、さらにこれら離間距離情報から壁面に対するビデオカメラの光軸の角度を演算する。
【0007】
他方、特許文献2には、ビデオカメラを搭載したロボットを遠隔操作するシステムにおいて、ビデオカメラの光軸を壁面と直交させた状態でロボットと壁面との間の離間距離を測定するシステム(但し、対象物を点検するためのものではない)が開示されている。このシステムでは、ロボットに3つのレーザーポインタが搭載される。3つのレーザーポインタは同一水平面において等しい間隔で配置されており、互いに平行をなす3つのレーザービームをロボットの正面から水平に発射するようになっている。ディスプレイには、壁面における3つのレーザービーム像が一直線上に映し出される。
【0008】
上記特許文献2のシステムにおいて、上記3つのレーザービーム像の間隔を画面のピクセル数を計数することにより算出し、この間隔が等しくなるように、ロボットの位置を制御する。特許文献2には明示されていないが、この位置制御は、上記のようにして算出した間隔のフィードバック情報に基づいて、自動的に行うようである。
上記のようにしてレーザービーム像の間隔を等しくすることにより、ロボットは壁面に対して真正面を向く(ビデオカメラの光軸が壁面と直交する)。この状態で、上記画面上のレーザービーム像の間隔から、ロボットと壁面との離間距離を演算する。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2009−85785号公報
【特許文献2】特開2004−37440号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
上記特許文献1のシステムにおいては、壁面までの距離を求めるのに、カメラの自動フォーカス機構を利用する方法や距離センサを用いる方法を利用している。自動フォーカス機構で距離を求めるには専用の高度なソフトウエアが必要であるし、距離センサは高価であるため、システム全体のコストが大幅に増大してしまう。
上記特許文献2のシステムでは、パソコン等の演算手段により、画面上における3つのレーザービーム像を認識して各像のピクセル位置を確定し、像間のピクセル数を算出することにより、壁面に対するロボットの姿勢を認識し、ロボットが壁面に対して真正面になるように自動制御するため、専用の高度なソフトウエアが必要になってしまう。
【課題を解決するための手段】
【0011】
本発明は、上記課題を克服するためになされたものであり、移動体と、上記移動体に設置されたビデオカメラと、上記移動体から離れて配されるディスプレイと、上記移動体を遠隔操作する操作手段と、上記ビデオカメラで撮影した映像を上記ディスプレイに表示させる表示制御手段とを備えた点検システムにおいて、
さらに、上記移動体に設けられた第1、第2のレーザー発射器を備え、これら第1、第2のレーザー発射器は、それぞれ第1、第2のレーザービームを同一平面に沿って平行に発射するようになっており、
上記表示制御手段は、上記ビデオカメラがその光軸を上記第1、第2レーザービームと平行にした状態で撮影した映像とともに、第1、第2の指標画像を上記ディスプレイに表示させ、
上記ディスプレイ画面上の互いに直交する第1、第2座標軸の少なくとも一方に関して、上記第1、第2の指標画像の中心位置は、上記ビデオカメラの光軸と上記第1、第2レーザービームが平坦な対象面と直交するとともに上記ビデオカメラから上記対象面までの離間距離が設定距離であった時に上記ディスプレイ画面上に現れる上記第1、第2レーザービーム像の中心位置と、一致することを特徴とする。
【0012】
上記構成によれば、レーザービームを発射するだけの安価なレーザー発射器を用いるので、点検システムのコストを低減させることができる。
また、ディスプレイ画面に表示された第1、第2の指標画像を利用して、移動体を手動操作により容易かつ正確に位置調節することができる。より具体的には、第1、第2のレーザービーム像を第1、第2の指標画像にそれぞれ合わせるように移動体を遠隔操作することにより、ビデオカメラの光軸を平坦な対象面と直交させるとともに、ビデオカメラを対象面に対して予め設定された離間距離に位置させることができ、その結果、正確な点検を行うことができる。
【0013】
好ましくは、上記第1、第2の指標画像は、上記少なくとも一方の座標軸方向に、上記設定距離の許容範囲に対応する広がりを有する。
この構成によれば、第1、第2の指標画像が許容範囲も現しているので、移動体の位置調節がより一層容易になる。
【0014】
好ましくは、上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置しており、上記ディスプレイ画面の第1座標軸が、上記第1、第2レーザービームの離間方向に対応しており、上記第1、第2の指標画像は、上記第1座標軸に関して上記画面の中央から互いに逆向きに等しい距離だけ離れており、上記第1座標軸方向に上記設定距離の許容範囲に対応する広がりを有している。
この構成によれば、ユーザーは、画面中央を挟んで表示された(例えば左右に表示された)第1、第2の指標画像を見ながら、容易に移動体の位置調節を行うことができる。
【0015】
好ましくは、上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置するとともに、上記平面から離れており、上記ディスプレイ画面の第1座標軸が、上記第1、第2レーザービームの離間方向に対応しており、上記第1、第2の指標画像は、上記第2座標軸方向に関して上記画面の中央から同方向に等しい距離だけ離れており、上記第2座標軸方向に上記設定距離の許容範囲に対応する広がりを有している。
この構成によれば、ユーザーは、画面中央から同距離だけ離れて表示された(例えば同じ高さに表示された)第1、第2の指標画像を見ながら、容易に移動体の位置調節を行うことができる。
【0016】
好ましくは、上記第1、第2の指標画像は、上記第1座標軸方向において、上記画面の中央から互いに逆向きに等しい距離だけ離れており、上記第1座標軸方向にも上記設定距離の許容範囲に対応する広がりを有する。
この構成によれば、第1、第2座標軸によって中心を定められた第1、第2指標画像を見ながら、より一層容易に移動体の位置調節を行うことができる。
【0017】
好ましくは、上記表示制御手段は、上記ビデオカメラから上記対象面までの離間距離が上記設定距離である時に用いられるべき所定尺度のスケールを、ディスプレイ画面上に表示する。
この構成によれば、ユーザーがディスプレイ画面上に現れたスケールを見ながら、対象面の特定部位の寸法、例えばクラックの溝幅や長さを目で確認することができる。しかもこのスケールの尺度は予め決定されているため、ソフトウエアの負担を最小限にすることができる。この場合、ズーム倍率に応じてスケール尺度を調節できるようにしてもよい。
【0018】
好ましくは、上記演算手段は、上記ディスプレイ画面上において上記第1、第2のレーザービーム像が上記第1、第2の指標画像内にそれぞれ入っている時に、画面上での第1、第2レーザービーム像の離間距離に基づいて、スケールの尺度を演算し、上記表示制御手段は、上記ディスプレイ画面上に、上記演算された尺度のスケールを表示する。
これによれば、ソフトウエアの負担が増えるが、正確な尺度のスケールを参照しながら対象面の特定部位の寸法をより高精度に知ることができる。
【0019】
好ましくは、さらに演算手段を備え、この演算手段は、上記ディスプレイ画面上において上記第1、第2のレーザービーム像が上記第1、第2の指標画像内にそれぞれ入っている時に、ユーザー入力により指定された画面上での特定部位の2点の位置に基づき、上記対象面の特定部位の2点間距離を演算する。
この構成によれば、簡単かつ正確に特定部位の実際の寸法を求めることができる。
【0020】
好ましくは、さらに、上記移動体に設けられた傾斜センサと、傾斜判断手段を備え、この傾斜判断手段は、上記傾斜センサで検出された移動体の傾斜角度が閾値以内であれば、対象面に対する移動体の位置調節を許容する信号を発し、閾値を越えた時には当該位置調節を禁じる信号を発する。
これによれば、移動体の傾斜が大きいため移動体の位置調節が不正確になる場合には、この位置調節作業を禁じることができる。
【発明の効果】
【0021】
本発明によれば、容易かつ正確な点検を行うことができるシステムを安価に提供することができる。
【図面の簡単な説明】
【0022】
【図1】床下コンクリート製基礎のクラックを測定するために用いられる、本発明の一実施形態に係わる点検システムの概略図であり、ロボットの平面図を含む。
【図2】上記ロボットの側面図である。
【図3】上記ロボットを前方から見た正面図である。
【図4】上記ロボットの中心軸線およびこのロボットに搭載されたビデオカメラの光軸が上記床下基礎の壁面に対して傾いている場合の作用を説明するもので、(A)はロボットの平面図、(B)はロボットの側面図、(C)はディスプレイの画面をそれぞれ示す。
【図5】ビデオカメラの光軸が上記床下基礎の壁面に対して直交するとともに、壁面に対して設定距離だけ離間している場合の作用を説明するもので、(A)はロボットの平面図、(B)はロボットの側面図、(C)はディスプレイの画面をそれぞれ示す。
【図6】ビデオカメラの光軸が床下基礎の壁面と直交するものの、上記基礎壁面とビデオカメラの間の距離が設定距離より遠い場合の、ディスプレイの画面を示す図である。
【図7】ビデオカメラの光軸が床下基礎の壁面と直交するものの、上記基礎壁面とビデオカメラの間の距離が設定距離より近い場合の、ディスプレイの画面を示す図である。
【図8】床下基礎の壁面に形成されたクラックとスケール像が表示された、ディスプレイの画面を示す図である。
【図9】上記点検システムにおいて実行される制御ルーチンを示すフローチャートである。
【図10】スケール像の変形例を示す図である。
【図11】本発明の第2実施形態を示すロボットの側面図である。
【図12】本発明の第3実施形態を示すロボットの側面図である。
【図13】本発明の第4実施形態において、レーザービーム像と指標画像が表示されたディスプレイ画面を示すもので、(A)はビデオカメラの光軸が基礎の壁面に対して傾いている場合を示し、(B)はビデオカメラが壁面に対して遠い場合を実線で示し、近い場合を破線で示し、(C)はビデオカメラが壁面に対して真正面を向き、壁面からの距離が設定距離にある場合を示す。
【図14】本発明の第5実施形態において、レーザービーム像と指標画像が表示されたディスプレイ画面を示すもので、(A)はビデオカメラの光軸が基礎の壁面に対して傾いている場合を示し、(B)はビデオカメラが壁面に対して遠い場合を実線で示し、近い場合を破線で示し、(C)はビデオカメラが壁面に対して真正面を向き、壁面からの距離が設定距離にある場合を示す。
【発明を実施するための形態】
【0023】
以下、床下のコンクリート製基礎(対象物)のクラックの長さや溝幅を測定するために用いられる、本発明の一実施形態に係わる点検システムについて図面を参照しながら説明する。
説明の便宜上、図1〜図3において、ロボット1(移動体)の左右、前後、上下を明示する。
【0024】
図1に示すように、点検システムは、ロボット1と、ノート型パソコン20とを備えている。
【0025】
最初に、図1〜図3を参照しながら、ロボット1の構成について説明する。ロボット1は軽量小型であり、その主要部10は前後方向に細長いボデイ11と、このボデイ11の左右に設けられた一対のクローラ12とを有している。図1においてロボット1の前後方向に延びる中心軸線を符号1aで示す。
上記一対のクローラ12は個別に制御されるので、ロボット1は、前後の直線的移動のみならず、超信地旋回(位置を変えずにその場での旋回)も可能である。
【0026】
上記ボデイ11の上面前部の左右幅方向の中央(平面視で上記中心軸線1a上)には、回動機構14を介してビデオカメラ15が設置されている。回動機構14は、図示しないモータによりボデイ11に対してパン回動(垂直軸を中心に水平回動)する第1回動体14aと、図示しない他のモータにより第1回動体14aに対してチルト回動(水平軸を中心に上下回動)する第2回動体14bとを有している。この第2回動体14bに上記ビデオカメラ15が設けられている。
【0027】
上記ボデイ11には、図1に示すように、送受信機16と、傾斜センサ17が設置されている。傾斜センサ17はロボット1の前後の傾斜角度、左右の傾斜角度を検出する。
【0028】
上記ボデイ11の前端面には、左右一対のレーザーポインタ18L,18R(第1、第2のレーザー発射器)が設けられている。
上記レーザーポインタ18L,18Rは、移動体10の接地面から所定高さの同一水平面P上に配置され、それらの光軸は、上記水平面P上に位置し、上記移動体10の中心軸線1aと平行をなすとともに、互いに平行をなしている。
レーザーポインタ18L,18Rは、移動体10の中心軸線1aに対して左右方向に等しい距離だけ離れている。
【0029】
図1〜3に示すように上記ビデオカメラ15が真正面を向いた時(ビデオカメラ15の光軸15aとロボット1の中心軸線1aが平行をなして、ロボット1の前方を向いた時)、その光軸15aは上記レーザーポインタ18L,18Rの光軸と平行をなし、上記レーザーポインタ18L,18Rが配置された水平面Pから離れている。ビデオカメラ15の光軸15aと水平面Pの高低差(離間距離)を図2、図3においてΔHで示す。
【0030】
他方、図1に示すようにパソコン20は、本体21と、ディスプレイ22と、図示しない送受信機を備えており、この送受信機と上記ロボット1の送受信機16との間で、無線による信号伝送が行われるようになっている。具体的には、パソコン20からロボット1に、クローラ12を走行させるための操作信号、ビデオカメラ15のパン、チルト回動のための操作信号、レーザーポインタ18L,18Rのオン、オフ信号が送られる。これとは逆に、ビデオカメラ15の映像信号や傾斜センサ17の検出信号が、パソコン20に送られる。なお、上記信号伝送は有線で行ってもよい。
【0031】
上記パソコン20の本体21は、後述する作用から明らかなように、操作手段、映像等を表示するための表示制御手段、傾斜判断手段、種々の演算を行う演算手段を実質的に備えている。
【0032】
上記構成をなす点検システムを用いて床下のコンクリート製の基礎Wを点検し、この基礎Wに生じたクラック(特定部位)の長さや溝幅を測定する。この作用を図4〜図9を参照しながら詳述する。なお、基礎Wは垂直の平坦な壁面(対象面)を有している。
【0033】
上記ビデオカメラ15で撮影された映像信号は、パソコン20の本体21に送られ、ディスプレイ22で表示される。上記ビデオカメラ15の光軸15a上の映像は、図4(C)に示すように、ディスプレイ22の画面の中心Oに現れる。
図4(C)においてディスプレイ22の画面において左右方向に延びる軸をX座標軸(第1座標軸)とし、上下方向に延びる軸をY座標軸(第2座標軸)とする。画面上のX座標軸は左右方向(レーザーポインタ18L,18Rの離間方向)に対応し、Y座標軸は垂直方向(上記水平面Pと直交する方向)に対応する。
【0034】
ユーザーは、本体21のキー操作(別体をなすリモートコントローラの操作でもよい)により、ロボット1の左右のクローラ12を遠隔制御することにより、ロボット1を床下空間において移動させ、数箇所で停止させ、各停止位置でビデオカメラ15をパン回動させながら、ディスプレイ22の画面に映し出された映像を見て基礎Wの状態を点検する。
【0035】
次に、図9のフローチャートを参照しながら、クラック長さ測定のための工程を順を追って説明する。なお、図9のフローチャートでは、ユーザーの手動による制御の工程と、パソコン20の本体21での制御・演算の工程が混在して示されている。
【0036】
ユーザーは、点検の際にクラックを発見したら(ステップ100)、画面上に測定OKかNGかの表示(図示しない)を見る(ステップ101)。パソコン20の本体21では、傾斜センサ17で検出された前後方向の傾斜角度と左右方向の傾斜角度をそれぞれ閾値と比較し、これら傾斜角度が閾値以内であると判断した時にはディスプレイ22の画面に測定OKの表示(測定許容信号の出力)をし、少なくともいずれか一方の傾斜角度が閾値を超えていると判断した時には、測定NG(測定禁止信号の出力)の表示をする。
【0037】
上記ステップ101において、上記本体21は、上記閾値以内と判断した時には測定OKの表示の代わりに、以下に説明する工程を許容する処理(測定許容信号の出力)をし、閾値を超えていると判断した時には測定NGの表示の代わりに、以下に説明する工程を禁じる処理(測定禁止信号の出力)をしてもよい。
なお、ステップ101において、ユーザー自身がディスプレイ22に表示された傾斜角度と閾値とを比較して、今後の工程を進めるか否かの判断をしてもよい。
【0038】
上記ステップ101で測定OK(傾斜角度が閾値以内)と判断した場合には、ステップ102に進む。このステップ102では、ユーザーが入力した指令信号に基づく自動制御により、ビデオカメラ15をロボット1の真正面に向け、レーザーポインタ18L,18RをONする。
【0039】
上記レーザーポインタ18L,18RがONすると、図4(A)に示すように、それぞれ互いに平行をなす例えば赤色(壁面と異なる色)のレーザービームLBL,LBRを上記移動体10の前方へ水平面Pに沿って発射する。本実施形態ではレーザービームLBL,LBRの断面は円形であるが、楕円、矩形、十字形等であってもよい。
【0040】
上記レーザービームLBL,LBRが基礎Wの壁面に当たると、その反射により壁面に像TL,TRが現れる。ビデオカメラ15がこれらレーザービーム像TL,TRを撮影し、本体21がディスプレイ22の画面に表示する(図4(C)参照)。
【0041】
上記レーザービーム像TL,TRのディスプレイ22の画面上での位置は、レーザーポインタ18L,18Rと壁面との間の離間距離に応じて変わる。その理由を、図4を参照しながら説明する。
【0042】
図4(A)のレーザービームLBRのように短い距離で壁面に当たると、このレーザービーム像TRは、ビデオカメラ15の光軸15aに対して水平方向に比較的大きな角度ΘR1で離れており、その結果、図4(C)に示すようにレーザービーム像TRと画面中心OのX座標軸方向の離間距離が大きくなる。また、短い距離で壁面に当たるレーザービーム像TRは、図4(B)に示すように、ビデオカメラ15の光軸15aに対して垂直方向に比較的大きな角度ΘR2で離れており、その結果、図4(C)に示すようにレーザービーム像TRと画面中心OのY座標軸方向の離間距離も大きくなる。
【0043】
同様に、図4(A)のレーザービームLBLのように長い距離で壁面に当たると、このレーザービーム像TLは、ビデオカメラ15の光軸15aに対して水平方向に比較的小さな角度ΘL1で離れており、その結果、図4(C)に示すようにレーザービーム像TLと画面中心OとのX座標軸方向の離間距離が小さくなる。また、短い距離で壁面に当たるレーザービーム像TLは、図4(B)に示すように、ビデオカメラ15の光軸15aに対して垂直方向に比較的小さな角度ΘL2で離れており、その結果、図4(C)に示すようにレーザービーム像TLと画面中心OとのY座標軸方向の離間距離も小さくなる。
【0044】
上記説明から明らかなように、ビデオカメラ15の光軸15aが壁面と直交していない場合には、レーザーポインタ18L,18Rと壁面との距離が互いに異なり、レーザービーム像TL,TRの画面中心OからのX座標軸方向、Y座標軸方向の離間距離が異なる。この離間距離の差は、壁面の法線と光軸15aとの角度が大きくなるほど(傾斜が大きくなるほど)、大きくなる。
【0045】
他方、ビデオカメラ15の光軸15aが壁面と直交している場合には、レーザーポインタ18L,18Rと壁面との距離が互いに等しく、図5(A)、(B)に示すように、レーザービーム像TL、TRのビデオカメラ15の光軸15aに対する水平方向の角度ΘL1、ΘR1は互いに等しく、垂直方向の角度ΘL2、ΘR2も互いに等しくなる。その結果、図5(C)に示すように、レーザービーム像TL,TRの画面中心OからのX座標軸方向、Y座標軸方向の離間距離が等しくなる。
【0046】
本実施形態では、上記本体21は、上記レーザーポインタ18L,18RのONとほぼ同時期に、図4(C)、図5(C)に示すように、ディスプレイ22の画面上に左右一対の指標画像ZL,ZRを表示する。これら指標画像ZL,ZRについて詳述する。
【0047】
上記説明から理解できるように、レーザーポインタ18L,18Rが互いに等しい距離だけ壁面から離間していることは、ビデオカメラ15の光軸15aとレーザービームLBL,LBRが壁面と直交していることを表す。
また、ビデオカメラ15は対象物まで所定距離だけ離間している時に光学上の特性上最も良好に撮影できる。この距離をビデオカメラ15から壁面までの最適距離として設定する。
【0048】
上記のようにビデオカメラ15が壁面から設定距離だけ離間している状況で、ディスプレイ22の画面に表示されるレーザービーム像TL,TRの中心位置が、上記指標画像ZL,ZRの中心位置として本体21に記憶されている。
【0049】
上記本体部21は、記憶された位置を中心にし、X座標軸、Y座標軸方向に広がりを持って、指標画像ZL,ZRを表示する。これらX座標軸、Y座標軸方向の広がりは、上記設定距離の許容範囲を表し、ひいてはビデオカメラ15の光軸15a(ロボット1の中心軸1a)の壁面に対する許容傾き角度を表している。すなわち、指標画像ZL,ZRは撮影および後述の測定のためのスイートスポットを表している。
なお、本実施形態では指標画像ZL,ZRは、円形であるが四角等であってもよい。
【0050】
再び図9のフローチャートに戻って説明すると、ステップ102の後、図5(C)に示すように画面上で上記レーザービーム像TL,TRが上記指標画像ZL,ZRに入るように、ユーザーの遠隔制御により、ロボット1の位置および姿勢を定める(ステップ103)。これにより、図5(A)に示すように、ビデオカメラ15の光軸15aがほぼ壁面と直交し、ビデオカメラ15と壁面との間の離間距離がほぼ撮影に最適な距離となる。
【0051】
なお、図6、図7は、壁面に対してビデオカメラ15の光軸15aが直交している時のレーザービーム像TL,TRを示しているが、図6に示す状態はビデオカメラ15と壁面が上記設定距離より遠く、図7に示す状態は上記設定距離より近い場合を示す。このような場合には、ロボット1を前進または後退させて、図5(C)に示す状態にする。
【0052】
次に、ユーザー入力による演算指令信号に応答して、本体21は画面上でのレーザービーム像TL、TRの中心間の距離Dm(図5(C)参照)を、これら像TL、TR間のピクセル数に基づき演算する。なお、このレーザービーム像TL、TRの中心位置情報は、本体21で自動検出してもよいし、ユーザーが画面上から直接入力してもよい。
【0053】
さらに、上記距離Dmから、上記ビデオカメラ15と壁面との間の実際の距離La(図5(B)参照)、ないしはロボット1と壁面との間の距離を演算する(ステップ104)。例えば、ビデオカメラ15と壁面の距離が設定距離Lxである時の画面上のレーザービーム像TL、TR間の距離をDxとすると、La=Lx・Dx/Dmの演算を行う。この距離情報Laはディスプレイ画面上に表示される。
【0054】
次に、ユーザーは ビデオカメラ15を真正面位置からチルト回動やパン回動を行って向きを調節したり、ズーミングを実行することにより、図8に示すようにクラック200を拡大して画面の中央近傍に映し出す(ステップ105)。
【0055】
次に、ユーザー入力による指令信号に応答して、本体21は画面に測定限界枠50を表示する(ステップ106)。この測定限界枠50の外では映像が歪み正確な測定が行えない。なお、測定限界枠50の表示は、上記離間距離演算の後に本体21が自動的に実行してもよい。この測定限界枠50はズーム倍率に応じて変えてもよい。
【0056】
次に、ユーザーは測定限界枠50内にクラック200が表示されていることを確認した後、カーソルを移動して、クラック200の両端201,202を指定する(ステップ106)。この際、本体21は、画面にX座標軸方向の寸法を計測するためのスケール301とY座標軸方向のスケール302を表示する。このスケール301,302の尺度は、上記レーザービーム像TL、TRの画面上での距離と、上記ズーム倍率の情報に基づいて決定する。
【0057】
次に、本体21は、上記入力されたクラック200の両端201,202間の画面上での離間距離Ds(図8参照)を演算し、これと既に演算した上記レーザービーム像TL、TRの画面上での距離Dmに基づき、クラック200の実際の長さLb(クラック200の実際の両端離間距離)を演算する(ステップ107)。例えば、レーザビームLBL,LBRの実際の間隔をLyとした時、Lb=Ly・Ds/Dmの演算を行う。なお、ズーミングを行っているときには、さらにズーム倍率で除す。
最後に、算出したクラック長さLbを画面上に表示する(ステップ108)。
なお、上記レーザービーム像TL、TRの画面上での距離Dmは、画面上のピクセル数に基づいて演算してもよいが、指標画像ZL,ZRの中心間距離(固定値)を用いてもよい。
【0058】
ソフトウエアの負担を軽くするために、図9のステップ104、106,107、108を省き、パソコン20が、図8に示すような所定尺度のスケール301,302をディスプレイ22の画面上に表示するだけでもよい。この場合のスケールの尺度は、レーザービーム像TL、TRの画面上の位置に基づき演算するものではなく固定されており、ビデオカメラ15から壁面までの離間距離が上記設定距離である時、換言すれば、レーザービーム像TL、TRの中心が指標画像ZL,ZRの中心と一致した時に、ディスプレイ22の画面上に表示されたクラック200の寸法を正確に示すことができるものである。ズーミングする場合には、このスケールの尺度をズーム倍率に応じて調節する。ユーザーは、このクラック200とスケールを見比べて、クラック200の長さを認識する。
【0059】
クラック200の溝幅寸法を計測する場合には、上述した長さ計測用のスケールとは異なるタイプのスケールが表示される。例えば図10に示すように、このスケールは、異なる線幅の複数の線と、各線に付された線幅寸法を表す数値を含んでいる。ユーザーは、スケールを移動させてクラック200の溝幅とスケール像の線幅を比較することにより、クラックの溝幅を決定する。スケールの尺度は、演算により求めてもよいし、固定されたものでもよい。この溝幅測定は、上述した実施形態および変形例や、後述する他の実施形態の全てに適用できる。
【0060】
スケール像を画面上において移動可能としてもよい。また、1つのスケールを用いて位置と傾きを変えることができるようにしてもよい。
また、自動演算する場合、スケールを表示しなくてもよい。
【0061】
次に、本発明の他の実施形態について図面を参照しながら説明する。以下に説明する実施形態において先行して説明する実施形態に対応する構成部には同番号を付してその詳細な説明を省略する。
【0062】
図11に示す第2実施形態では、天井点検用にさらに左右のレーザーポインタ28L,28Rを追加する。これらレーザーポインタ28L,28Rは垂直方向に上向きにレーザービームLBL’、LBR’を発射する。ビデオカメラ15を回動してその光軸15aを垂直にしてレーザービームLBL’、LBR’と平行にすることができる。この構成によれば、天井面のクラック(特定部位)の寸法を測定することができる。
【0063】
図12に示す第3実施形態では、レーザーポインタ38L,38Rが、ビデオカメラ15が固定された回動体14bに、固定される。これによれば、ビデオカメラ15の光軸15aとレーザーポインタ28L,28Rの光軸を常に平行にすることができる。
【0064】
図13に示す第4実施形態では、レーザービームが縦長の線状をなし、その像TL’、TR’が画面上縦長の線をなし、X座標軸上の位置を表示するがY座標軸上の位置を明確に示さない。
これに対応して画面には縦長の帯状の指標画像ZL’,ZR’が表示される。この指標画像ZL’,ZR’は、X座標軸に関して上記画面の中心Oから互いに逆向きに等しい距離だけ離れており、設定距離の許容範囲に対応したX座標軸方向の広がりを表している。
【0065】
上記第1、第2の指標画像ZL’,ZR’のX座標軸方向の中心位置は、上記ビデオカメラの光軸と上記第1、第2レーザービームが平坦な対象面と直交するとともに、上記第1、第2レーザー発射器から上記対象面までの離間距離が設定距離であった時に、上記ディスプレイ22の画面上に現れる上記第1、第2レーザービーム像TL’、TR’と一致する。
【0066】
上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置している。本実施形態では、ビデオカメラの光軸とレ−ザーポインタを同一高さ(同一平面)に配置しているが、第1実施形態と同様に配置してもよい。
【0067】
第4実施形態の作用を簡単に説明する。図13(A)はビデオカメラの光軸が基礎の壁面に対して傾いている場合を示し、図13(B)はビデオカメラが壁面に対して遠い場合を実線で示し、近い場合を破線で示す。上記第1、第2レーザービーム像TL’、TR’が図13(A)、(B)に示す位置に表示されている場合、ロボットを遠隔制御して図13(C)に示すように、上記第1、第2レーザービーム像TL’、TR’を第1、第2の指標画像ZL’,ZR’内に位置させる。その後の工程は第1実施形態と同様である。
【0068】
図14に示す第5実施形態では、レーザービームが横長の線状をなし、その像TL”、TR”が画・BR>ハ上横長の線をなし、Y座標軸上の位置を表示するがX座標軸上の位置を明確に示さない。
これに対応して画面には横長の帯状の指標画像ZL”,ZR”が表示される。この指標画像ZL”,ZR”は、Y座標軸に関して上記画面の中心Oから同方向に等しい距離だけ離れており、設定距離の許容範囲に対応したY座標軸方向の広がりを表している。本実施形態では指標画像ZL”,ZR”が連なって1つの帯になっているが、離れていてもよい。
ビデオカメラとレーザーポインタの配置は第1実施形態と同様である。
【0069】
第5実施形態の作用を簡単に説明する。図14(A)はビデオカメラの光軸が基礎の壁面に対して傾いている場合を示し、図14(B)はビデオカメラが壁面に対して遠い場合を実線で示し、近い場合を破線で示す。上記第1、第2レーザービーム像TL”、TR”が図14(A)、(B)に示す位置に表示されている場合、ロボットを遠隔制御して図14(C)に示すように、上記第1、第2レーザービーム像TL”、TR”を第1、第2の指標画像ZL”,ZR”内に位置させる。その後の工程は第1実施形態と同様である。
【0070】
本発明は上記実施例に制約されず、種々の態様を採用することができる。例えば、傾斜センサは前後方向の傾斜と左右方向の傾斜のいずれか一方を検出するものであってもよい。
移動体はクローラ型のみならず、車輪型のものであってもよい。
指標画像の位置に対応するビデオカメラと対象面との設定距離は、撮影に最適な距離から許容範囲内で外れていてもよい。
指標画像は線状をなしていてもよい。またレーザービーム像と同程度の大きさであってもよい。
【産業上の利用可能性】
【0071】
本発明は、床下点検システム等に適用することができる。
【符号の説明】
【0072】
1 ロボット(移動体)
15 ビデオカメラ
17 傾斜センサ
18L,18R,28L,28R,38L,38R ・・・レーザーポインタ(レーザー発射器)
20 パソコン(基地局)
21 ディスプレイ
22 本体(操作手段、表示制御手段、傾斜判断手段、演算手段)
P 水平面(レーザービームが走る平面)
LBL,LBR レーザービーム
TL,TR ,TL’,TR’,TL”,TR” レーザービーム像
ZL,ZR ,ZL’,ZR’,ZL”,ZR” 指標画像
【特許請求の範囲】
【請求項1】
移動体と、上記移動体に設置されたビデオカメラと、上記移動体から離れて配されるディスプレイと、上記移動体を遠隔操作する操作手段と、上記ビデオカメラで撮影した映像を上記ディスプレイに表示させる表示制御手段とを備えた点検システムにおいて、
さらに、上記移動体に設けられた第1、第2のレーザー発射器を備え、これら第1、第2のレーザー発射器は、それぞれ第1、第2のレーザービームを同一平面に沿って平行に発射するようになっており、
上記表示制御手段は、上記ビデオカメラがその光軸を上記第1、第2レーザービームと平行にした状態で撮影した映像とともに、第1、第2の指標画像を上記ディスプレイに表示させ、
上記ディスプレイ画面上の互いに直交する第1、第2座標軸の少なくとも一方に関して、上記第1、第2の指標画像の中心位置は、上記ビデオカメラの光軸と上記第1、第2レーザービームが平坦な対象面と直交するとともに上記ビデオカメラから上記対象面までの離間距離が設定距離であった時に上記ディスプレイ画面上に現れる上記第1、第2レーザービーム像の中心位置と、一致することを特徴とする点検システム。
【請求項2】
上記第1、第2の指標画像は、上記少なくとも一方の座標軸方向に、上記設定距離の許容範囲に対応する広がりを有することを特徴とする請求項1に記載の点検システム。
【請求項3】
上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置しており、
上記ディスプレイ画面の第1座標軸が、上記第1、第2レーザービームの離間方向に対応しており、
上記第1、第2の指標画像は、上記第1座標軸に関して上記画面の中央から互いに逆向きに等しい距離だけ離れており、上記第1座標軸方向に上記設定距離の許容範囲に対応する広がりを有していることを特徴とする請求項2に記載の点検システム。
【請求項4】
上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置するとともに、上記平面から離れており、
上記ディスプレイ画面の第1座標軸が、上記第1、第2レーザービームの離間方向に対応しており、
上記第1、第2の指標画像は、上記第2座標軸方向に関して上記画面の中央から同方向に等しい距離だけ離れており、上記第2座標軸方向に上記設定距離の許容範囲に対応する広がりを有していることを特徴とする請求項2に記載の点検システム。
【請求項5】
上記第1、第2の指標画像は、上記第1座標軸方向において、上記画面の中央から互いに逆向きに等しい距離だけ離れており、上記第1座標軸方向にも上記設定距離の許容範囲に対応する広がりを有することを特徴とする請求項4に記載の点検システム。
【請求項6】
上記表示制御手段は、上記ビデオカメラから上記対象面までの離間距離が上記設定距離である時に用いられるべき所定尺度のスケールを、上記ディスプレイ画面上に表示することを特徴とする請求項1〜5のいずれかに記載の点検システム。
【請求項7】
上記演算手段は、上記ディスプレイ画面上において上記第1、第2のレーザービーム像が上記第1、第2の指標画像内にそれぞれ入っている時に、画面上での第1、第2レーザービーム像の離間距離に基づいて、スケールの尺度を演算し、
上記表示制御手段は、上記ディスプレイ画面上に、上記演算された尺度のスケールを表示することを特徴とする請求1〜5のいずれかに記載の点検システム。
【請求項8】
さらに演算手段を備え、この演算手段は、上記ディスプレイ画面上において上記第1、第2のレーザービーム像が上記第1、第2の指標画像内にそれぞれ入っている時に、ユーザー入力により指定された画面上での特定部位の2点の位置に基づき、上記対象面の特定部位の2点間距離を演算することを特徴とする請求項1〜5のいずれかに記載の点検システム。
【請求項1】
移動体と、上記移動体に設置されたビデオカメラと、上記移動体から離れて配されるディスプレイと、上記移動体を遠隔操作する操作手段と、上記ビデオカメラで撮影した映像を上記ディスプレイに表示させる表示制御手段とを備えた点検システムにおいて、
さらに、上記移動体に設けられた第1、第2のレーザー発射器を備え、これら第1、第2のレーザー発射器は、それぞれ第1、第2のレーザービームを同一平面に沿って平行に発射するようになっており、
上記表示制御手段は、上記ビデオカメラがその光軸を上記第1、第2レーザービームと平行にした状態で撮影した映像とともに、第1、第2の指標画像を上記ディスプレイに表示させ、
上記ディスプレイ画面上の互いに直交する第1、第2座標軸の少なくとも一方に関して、上記第1、第2の指標画像の中心位置は、上記ビデオカメラの光軸と上記第1、第2レーザービームが平坦な対象面と直交するとともに上記ビデオカメラから上記対象面までの離間距離が設定距離であった時に上記ディスプレイ画面上に現れる上記第1、第2レーザービーム像の中心位置と、一致することを特徴とする点検システム。
【請求項2】
上記第1、第2の指標画像は、上記少なくとも一方の座標軸方向に、上記設定距離の許容範囲に対応する広がりを有することを特徴とする請求項1に記載の点検システム。
【請求項3】
上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置しており、
上記ディスプレイ画面の第1座標軸が、上記第1、第2レーザービームの離間方向に対応しており、
上記第1、第2の指標画像は、上記第1座標軸に関して上記画面の中央から互いに逆向きに等しい距離だけ離れており、上記第1座標軸方向に上記設定距離の許容範囲に対応する広がりを有していることを特徴とする請求項2に記載の点検システム。
【請求項4】
上記ビデオカメラの光軸は、上記第1、第2レーザービームが走る上記平面と直交する方向から見て、上記第1、第2レーザービーム間の中央に位置するとともに、上記平面から離れており、
上記ディスプレイ画面の第1座標軸が、上記第1、第2レーザービームの離間方向に対応しており、
上記第1、第2の指標画像は、上記第2座標軸方向に関して上記画面の中央から同方向に等しい距離だけ離れており、上記第2座標軸方向に上記設定距離の許容範囲に対応する広がりを有していることを特徴とする請求項2に記載の点検システム。
【請求項5】
上記第1、第2の指標画像は、上記第1座標軸方向において、上記画面の中央から互いに逆向きに等しい距離だけ離れており、上記第1座標軸方向にも上記設定距離の許容範囲に対応する広がりを有することを特徴とする請求項4に記載の点検システム。
【請求項6】
上記表示制御手段は、上記ビデオカメラから上記対象面までの離間距離が上記設定距離である時に用いられるべき所定尺度のスケールを、上記ディスプレイ画面上に表示することを特徴とする請求項1〜5のいずれかに記載の点検システム。
【請求項7】
上記演算手段は、上記ディスプレイ画面上において上記第1、第2のレーザービーム像が上記第1、第2の指標画像内にそれぞれ入っている時に、画面上での第1、第2レーザービーム像の離間距離に基づいて、スケールの尺度を演算し、
上記表示制御手段は、上記ディスプレイ画面上に、上記演算された尺度のスケールを表示することを特徴とする請求1〜5のいずれかに記載の点検システム。
【請求項8】
さらに演算手段を備え、この演算手段は、上記ディスプレイ画面上において上記第1、第2のレーザービーム像が上記第1、第2の指標画像内にそれぞれ入っている時に、ユーザー入力により指定された画面上での特定部位の2点の位置に基づき、上記対象面の特定部位の2点間距離を演算することを特徴とする請求項1〜5のいずれかに記載の点検システム。
【図1】


【図2】

【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】

【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−18073(P2012−18073A)
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願番号】特願2010−155435(P2010−155435)
【出願日】平成22年7月8日(2010.7.8)
【出願人】(000110251)トピー工業株式会社 (255)
【Fターム(参考)】
【公開日】平成24年1月26日(2012.1.26)
【国際特許分類】
【出願日】平成22年7月8日(2010.7.8)
【出願人】(000110251)トピー工業株式会社 (255)
【Fターム(参考)】
[ Back to top ]