
点検装置および点検方法
【課題】 ケーブルの周りを一周にわたって簡単に、かつ短時間で点検できる装置を提供する。
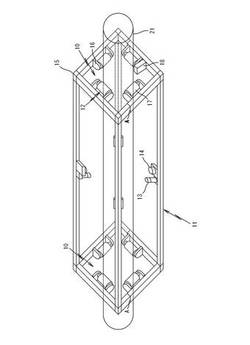
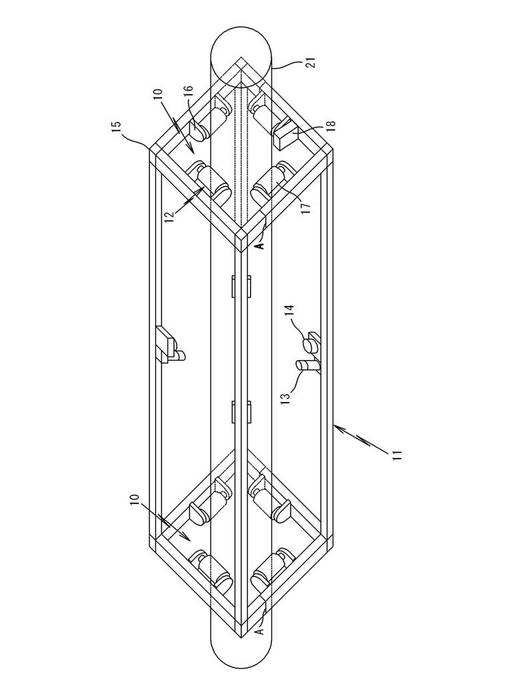
【解決手段】 この装置は、ケーブル21が通される通路を有するフレーム部材11と、フレーム部材11の長手方向の両端に形成され通路に連続する開口10の中心に向けて突出するように設けられ、通路を通されたケーブル21の外表面に当接して、フレーム部材11をケーブル21に支持するとともに、フレーム部材11をケーブル21の長さ方向へ移動させることが可能な走行支持手段12と、フレーム部材11に、ケーブル21と周方向に対向して取り付けられる複数の撮影手段14とを含む。
【解決手段】 この装置は、ケーブル21が通される通路を有するフレーム部材11と、フレーム部材11の長手方向の両端に形成され通路に連続する開口10の中心に向けて突出するように設けられ、通路を通されたケーブル21の外表面に当接して、フレーム部材11をケーブル21に支持するとともに、フレーム部材11をケーブル21の長さ方向へ移動させることが可能な走行支持手段12と、フレーム部材11に、ケーブル21と周方向に対向して取り付けられる複数の撮影手段14とを含む。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ケーブルやワイヤ等の点検を行う自走式の点検装置およびその点検方法に関する。
【背景技術】
【0002】
送電線等のケーブルは、自然災害、鳥獣や人的行為により、損傷を受けることがあり、これを放置しておくと、ケーブルの断線、絶縁不良等の障害の原因となることから、定期的な点検が必要とされている。これまでは、電気的な測定により障害のあるルートの特定をし、その障害箇所については最終的にケーブル外皮を目視により特定している。
【0003】
その方法として、電柱に登り、目視により検査を行う方法、ケーブルに梯子をかけ、その梯子を昇り、目視により検査を行う方法、宙乗り器をケーブルにかけ、その宙乗り器に作業員が乗り、それを移動させながら、目視により検査を行う方法、高所作業車に設けられたバケットに作業員が乗り、それをケーブルに接近させ、そのバケットから目視により検査を行う方法のいずれかが採用されている。
【0004】
しかしながら、これらの方法では、高所作業のため、作業員に危険が伴い、1回の検査による検査範囲が限定され、電柱間の部分のケーブルの検査を行うことができないという問題があった。また、高所作業車を駐車できない場所では使用できず、駐車できるにしても、他の通行を妨げる等の問題もあった。
【0005】
そこで、地上から昇降器によりケーブル外被観測装置を空中に配線された架空ケーブルに乗せ、地上から制御手段による遠隔操作で架空ケーブル上を移動させながら、カメラで架空ケーブルの所望箇所の外観を撮影しつつ、その外観映像を表示手段に表示させ、架空ケーブルの外被状態を検査するケーブル外被観測装置が提案されている(例えば、特許文献1参照)。このように、遠隔操作により架空ケーブルの外観を撮影し、映像として検査することにより、架空ケーブル下の環境に影響をされず、安全かつ連続的に架空ケーブルの外被状態を検査することができる。
【0006】
ケーブルは、送電線に限られるものではなく、斜張橋や吊り橋等にも使用されている。斜張橋は、主塔から真っ直ぐに張られているケーブルが直接橋桁を支え、吊り橋は、主塔間に撓むようにケーブルが設けられ、そのケーブルにぶら下がるハンガーロープにより橋桁を支える構造とされている。ケーブルやハンガーロープの損傷は、橋桁が落下するという危険性があることから、定期的な点検が必要とされている。
【0007】
このケーブルの点検方法として、主塔の塔頂にロープをセットし、その塔頂から降下し、ケーブルまで到達したところで、滑車をケーブルに取り付け、ハーネスと繋ぎ、この滑車を利用してケーブルに沿って安全かつスムーズに下降し、ケーブルの劣化を近接目視、直接観察する方法が採用されている。
【0008】
また、クレーンが届く位置では、クレーンを使用し、クレーンの先に設けられたバケットに作業員が乗り、それをケーブルに接近させ、そのバケットから目視により検査を行う方法や、クレーンが届かない位置については、地上あるいは主塔頂上部等から望遠鏡で遠望目視により点検を行う方法も採用されている。
【0009】
しかしながら、クレーンによる点検は、通行止めにする必要があり、クレーンの移動が必要であるため、時間がかかり、コストもかかる。また、高所作業であるため、安全性に問題がある。遠望目視による点検は、激しい劣化しか検出することができず、その激しい劣化を検出した場合でも、その位置を正確に特定することができない。また、劣化状況を写真等により記録することができず、ケーブルの周りを一周にわたって点検することができない場合があり、主塔頂上部からの点検では安全性に問題があった。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平7−260453号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
そこで、斜張橋や吊り橋等のケーブルも、送電線等のケーブルのように、遠隔操作により、そのケーブルの外観を撮影し、映像として検査することで、劣化状況を写真等により記録することができ、安全性も確保することができる。
【0012】
しかしながら、特許文献1に記載の方法では、遠隔操作によりケーブルの外観を撮影し、映像により検査を行うにしても、カメラの視線をケーブルに対して三次元的に移動させるカメラ支持部およびアームおよびモータからなるカメラ移動部、カメラ移動部をケーブルに沿って移動させる駆動部、それらをケーブルに乗せる昇降器を備える必要があることから、安価で提供することはできず、その移動にも時間がかかり、ケーブルの周りを一周にわたって点検することは難しいという問題がある。また、このような大掛かりなアームを使用した撮影装置では、その撮影位置を簡単に制御することができないという問題もある。
【0013】
そこで、ケーブルの周りを一周にわたって簡単な制御で点検することができ、また、その点検も短時間で行うことができ、さらには安価で提供することができる装置の提供が望まれていた。
【課題を解決するための手段】
【0014】
本発明は、上記課題に鑑みてなされたものであり、電柱やケーブルといった円筒体または綱状物が通される通路を有するフレーム部材と、フレーム部材の長手方向の両端に形成され通路に連続する開口の中心に向けて該フレーム部材から突出するように設けられ、通路を通された円筒体または綱状物の外表面に当接して、フレーム部材を円筒体または綱状物に支持するとともに、フレーム部材を円筒体または綱状物の長さ方向へ移動させることが可能な走行支持手段と、フレーム部材に円筒体または綱状物と周方向に対向して取り付けられる複数の撮影手段とを含む、円筒体または綱状物の点検装置が提供される。
【0015】
フレーム部材は、円筒体等へ取り付けるために2つに分離可能とされ、それらを連結するためのジョイントを用いて連結される。このフレーム部材は、断面が矩形の角管と、角管同士を連結するための、角管と嵌合する嵌合部を備えるジョイントを用いて構成することができる。また、フレーム部材は、角管およびジョイントにより形成された両端の開口を除く、角管およびジョイントにより形成される側部の開口を塞ぐように矩形の板を取り付けたものとすることができる。その板としては、内部の様子を望遠鏡等により視認することができるように、透明板を用いることができる。
【0016】
また、フレーム部材は、両端の開口を覆うカバーを備えることができ、カバーは、円筒体または綱状物が挿通可能な穴を有し、穴の中心へ向けて突出するように設けられ、円筒体または綱状物の外表面を清掃するブラシを備えることができる。
【0017】
走行支持手段は、フレーム部材の開口が形成された各端部に設けられ、開口の中心に向けて突出する少なくとも3つのローラ支持部と、各ローラ支持部により回転可能に支持され、円筒体または綱状物の外表面と当接する少なくとも3つのローラと、少なくとも1つのローラを回転させる動力手段とを備える。
【0018】
複数の撮影手段は、例えば、4つの撮影手段から構成され、円筒体または綱状物と周方向に対向して90°ごとに取り付けることができる。フレーム部材が上記の板を取り付けたものとされる場合、複数の撮影手段は、フレーム部材の内部に設置されることになり、円筒体または綱状物の外表面の様子が見えにくくなる。このため、複数の撮影手段の各々に近隣して設けられ、撮影手段が撮影する範囲に光を照射するための複数の光源を設けることができる。
【0019】
また、点検装置は、故障等の時にこの装置を引っ張り、回収するために、フレーム部材に連結されるワイヤをさらに備えることができる。この点検装置は、無線通信により信号を受信し、その信号に応答して、撮影手段により撮影された画像の画像データを送信し、動力手段へローラを回転または停止させる信号を出力する制御手段をさらに備えることができる。
【0020】
円筒体または綱状物が斜めまたは水平に延びるケーブルである場合、上記の構成では装置が回転し、損傷位置が分からなくなる場合がある。そこで、フレーム部材の1箇所に錘を備え、そのケーブルを中心として装置が回転しないように抑制することが好ましい。
【0021】
損傷位置の特定は、後の補修工事において重要である。単に損傷部分を撮影するのみでは、後にその位置を見つけるのに時間を要することになる。そこで、ローラにエンコーダといったローラの回転数を計測し、その位置までの距離を算出するための距離計測手段をさらに備えることが好ましい。計測された距離は、距離情報として撮影画像とともに記録され、後の工事における損傷位置の特定の際に利用することができる。これにより、その損傷位置の特定が短時間で行えるようになる。
【0022】
本発明では、上記の円筒体または綱状物の点検装置のほか、その点検装置により行われる点検方法も提供することができる。この点検方法は、長手方向の両端に形成される開口と該開口に連続する通路を有するフレーム部材を、円筒体または綱状物が通路を通るように該円筒体または綱状物に取り付け、開口の中心に向けてフレーム部材から突出するように設けられる走行支持手段を、通路を通された円筒体または綱状物の外表面に当接させ、フレーム部材を円筒体または綱状物に支持させるステップと、フレーム部材に円筒体または綱状物と周方向に対向して取り付けられた複数の撮影手段により、円筒体または綱状物の外表面を撮影するステップと、走行支持手段によりフレーム部材を円筒体または綱状物の長さ方向へ移動させるステップとを含む。また、この点検方法は、円筒体または綱状物の最後まで撮影したかを判断するステップを含み、最後まで撮影していないと判断した場合に、上記移動させるステップと上記撮影するステップとを実行させる。
【発明の効果】
【0023】
本発明の点検装置および点検方法を提供することにより、ケーブルが斜め方向に延びる場合であっても点検を行うことができ、また、近接撮影することができるため、微細な劣化も発見することができる。また、作業員が離れた場所で劣化状況やその位置を把握することができるため、安全性を向上させることができる。
【0024】
この点検装置は、小型の装置であり、それを支持するためのアームや昇降器等が不要で、それを移動させるための車両も不要であるため、作業の間、車両を通行止めにする必要がなくなる。また、アームや昇降器、車両が不要であるため、安価で提供することができ、安価に点検を行うことができる。
【0025】
また、この点検装置は、その状況を撮影画像の電子データとして保管することができ、これにより、再度確認することができ、適切な対策に役立てることができる。
【0026】
ケーブル等の損傷の大きさは、その位置とともに後の補修工事において重要な情報であるが、本発明の点検装置は、ケーブル等の表面から各撮影手段までの距離が一定で、焦点距離が一定となるため、撮影した画像を平面上に精度良く展開することができ、損傷の幅や長さ、面積をより高い精度で算出することができる。
【0027】
また、撮影手段は、動画による連続的な画像を取得することができるが、この動画から切り出した複数の静止画を用いて画像解析を行うことにより、損傷の深さも算出することが可能となる。距離計測手段を備える点検装置は、損傷位置や移動距離を計測することができることから、その計測が精度良く行うことができれば、単純に三角測量の原理により深さを求めることも可能となる。
【図面の簡単な説明】
【0028】
【図1】本発明の点検装置の構成例を示した図。
【図2】斜張橋および吊り橋を例示した図。
【図3】本発明の点検装置に用いられるカバーを例示した図。
【図4】本発明の点検方法の流れを示したフローチャート図。
【発明を実施するための形態】
【0029】
図1は、本発明の点検装置の構成例を示した図である。図1に示した実施形態は、1つの構成例であるので、本発明は、この実施形態に限定されるものでない。
【0030】
本発明の点検装置は、円筒体または綱状物の損傷を検出するための自走式の点検ロボットである。点検対象となる円筒体としては、電柱、水道管、排水管、ガス管等を挙げることができ、綱状物としては、送電線等の電気ケーブル、光ファイバーケーブル等の通信ケーブル、斜張橋の主桁を支えるために主塔から斜め方向へまっすぐに張られるケーブル、吊り橋の橋桁を支えるために主塔間に張られるメインケーブルおよびメインケーブルと橋桁とを繋ぐハンガーロープ等を挙げることができる。
【0031】
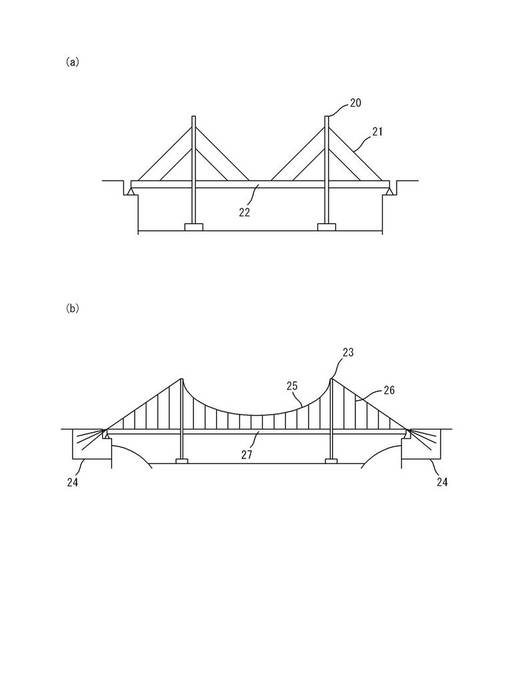
ここで、斜張橋および吊り橋について図2(a)および(b)を参照して簡単に説明する。これらの橋は、橋の両端の距離が200mを超す場合に選択されることが多い橋である。斜張橋は、図2(a)に示すように、川や海の底に基礎が構築され、その基礎上に、鋼や鉄筋コンクリート(RC)により主塔20が構築され、この主塔20から斜め方向へ張られたケーブル21により主桁22を直接支える構造とされている。主塔20は、2本であることが多いが、1本や3本以上とされる場合もある。この主塔20には、圧縮力のみが作用する。
【0032】
ケーブル21は、主塔20と主桁22を繋ぎ、主桁22を支える。このケーブル21は、主塔20を挟んで左右に張られ、左右にかかる力のバランスをとり、また、本数を多くすることにより、ケーブル一本あたりに作用する力を小さくしている。主桁22は、人や車が通行する部分である。
【0033】
吊り橋は、図2(b)に示すように、川や海の底に基礎が構築され、その基礎上に、鋼や鉄筋コンクリートにより主塔23が構築され、橋の両岸にはアンカーレッジ24と呼ばれる土台が構築され、メインケーブル25が、主塔23とアンカーレッジ24との間、主塔23間に張られ、そのメインケーブル25から垂らされるハンガーロープ26により橋桁27を支える構造とされている。
【0034】
主塔23は、メインケーブル25を支える塔で、両岸から全長の約1/4の位置に2本設けられる。アンカーレッジ24は、橋の両端にあり、メインケーブル25を繋ぎ止める碇の役割を果たすものである。メインケーブル25は、主塔23に架けられ、鋼製のワイヤが用いられる。ハンガーロープ26は、メインケーブル25から鉛直に垂らされ、橋桁27を支えるもので、その位置により長さが異なり、撚ったワイヤロープが用いられる。橋桁27は、道路や鉄道が設けられ、人や車両等が通行する部分である。
【0035】
以下、本発明の点検装置を、図2(a)に示す斜張橋のケーブル21の劣化状況やその位置を正確に把握するための点検装置として詳細に説明する。再び図1を参照して、この点検装置は、ケーブル21が通される通路を備えるフレーム部材11と、フレーム部材11の長手方向の両端に形成され、その通路に連続する開口10の中心に向けてフレーム部材11から突出するように設けられ、その通路を通されたケーブル21の外表面に当接して、フレーム部材11をケーブル21に支持するとともに、フレーム部材11をケーブル21の長さ方向へ移動させることが可能な走行支持手段12と、フレーム部材11に、ケーブル21と周方向に対向して取り付けられる4つの光源13および4つの撮影手段14とを含んで構成されている。
【0036】
フレーム部材11は、図1に示すようなアルミニウム製の角管を複数用い、角管に嵌合される嵌合部が3方向に延びる三方向ジョイント15により連結して形成することができる。このジョイント15は、互いに垂直なx軸、y軸、z軸という3方向に嵌合部が延びているものである。角管は、断面矩形で中空とされていて、ジョイント15は、先端に行くにつれてわずかにテーパが形成されていて、押し込まれることにより断面の大きい末端が角管の内面に強く密着して、強い締結力を生じさせるものである。
【0037】
例えば、長さ430mmの角管を8本と、長さ500mmの角管を4本用い、上記のジョイント15を8つ用いて連結し、図1に示すようなフレーム部材11を作ることができる。この場合、長さ430mmの8本の角管により2つの開口10が形成され、それらを両端に配置し、長さ500mmの4本の角管により接続することにより、その内部にケーブル21が通る通路が形成される。
【0038】
また、フレーム部材11は、下側に配置される4本の長さ430mmの角管を、例えば、切断部Aで100mmと330mmの2つに切断し、それらを2方向に延びる図示しない二方向ジョイントを用いて連結するように構成する。このジョイントは、180°異なる方向へ嵌合部が延びているものである。このジョイントを取り外し、連結を解除することにより、フレーム部材11を2つに分離することができ、フレーム部材11内へ入れ、再びそのジョイントにより連結することで、ケーブル21が通路を通るように、ケーブル21にフレーム部材11を取り付けることができる。
【0039】
角管により作成されたフレーム部材11は、その側部にも開口を4つ有しているが、その側部の開口を矩形の板により塞ぎ、雨天であっても光源13や撮影手段14が濡れることはなく、点検作業を実施することができるようにすることができる。この矩形の板としては、プラスチック樹脂の板や木板等を用いることができる。プラスチック樹脂としては、ポリ塩化ビニル、ポリエチレン、ポリプロピレン、ABS樹脂(アクリロニトリルブタジエンスチレン樹脂)等を用いることができる。また、内部の様子を望遠鏡等により視認することができるように、透明な板により形成することができる。透明な板としては、強度を考慮して、アクリル板を採用することができる。これらの板は、接着剤やドリルねじ等を使用して角管に接着、連結することができる。
【0040】
角管を用いなくても、4枚の矩形の板のみを使用し、それらを接合して箱状に形成したものをフレーム部材11として用いることも可能である。また、フレーム部材11は、この箱状のものに限らず、円筒状のものであってもよい。このように箱状あるいは円筒状に形成されたフレーム部材11は、一方の開口から内部を通して他方の開口へと連続する穴を形成し、その穴がケーブル21を通すための通路とされる。この場合も、ケーブル21を内部へ入れる必要があることから、下側に接合される板を2つに切断し、その2つを連結手段により連結するように構成される。ここで使用される連結手段としては、これまでに知られたいかなる手段でも用いることができ、例えば、上記のような2方向に嵌合部が延びるジョイントを複数用いて連結することができる。
【0041】
走行支持手段12は、これに限られるものではないが、フレーム部材11の長手方向の両端に形成された開口10、上記の例で具体的に言えば、4本の430mmの角管をジョイント15により連結して形成された開口10の中心に向けて、そのフレーム部材11の端部、これも具体的に言えば、フレーム部材11の端部を構成するそれら4本の430mmの角管から突出するように4つずつ設けられたローラ支持部16と、各ローラ支持部16により回転可能に支持され、ケーブル21の外表面と当接する、ローラ支持部16と同じ数のローラ17と、1つのローラ17を回転させる動力手段としてのモータ18とを含んで構成される。
【0042】
ローラ支持部16は、フレーム部材11から開口10の中心に向けて突出するように互いに離間して設けられ、その先端にローラ17の回転軸が挿入可能な凹部または孔が形成された2本のアームから構成される。これらのアームは、伸縮可能とし、ケーブルの径に合わせて調整することができるようにされていてもよい。ローラ17は、回転軸と、その回転軸を中心として、それに周設される円筒形の接触部とから構成される。回転軸は、接触部からその長手方向へ突出していて、その両端部は、上記のアームの凹部に嵌合またはアームの孔に挿入され、ローラ17を回転可能にしている。モータ18は、図示しない制御手段からの指示、すなわち信号の入力によりローラ17を所定の回転数で回転させる。
【0043】
ローラ支持部16およびローラ17の回転軸は、プラスチック樹脂や、鋼やアルミニウム等の金属により形成することができるが、強度の点から金属のほうが好ましい。ローラ17の接触部は、ケーブル21の外表面と当接し、フレーム部材11をケーブル21に支持することから、密着性が良好で、ケーブル21外表面との摩擦抵抗が大きいほうが好ましく、例えば、弾性材料から形成することができる。弾性材料としては、ゴムを挙げることができ、天然ゴム、イソプレンゴムやウレタンゴムやクロロプレンゴム等の合成ゴムを用いることができる。
【0044】
図1に示す実施形態では、ローラ支持部16およびローラ17は、フレーム部材11の一方の端部に4つ設けられ、他方の端部にも4つ設けられ、合計8つ設けられている。しかしながら、ケーブル21にフレーム部材11を適切に支持することができ、ケーブル21の長さ方向へフレーム部材11を移動させることができれば、合計8つ設ける必要はなく、各端部に3つずつ設ける構成であってもよい。また、それ以上の数設けてもよい。
【0045】
動力手段としてのモータ18は、各ローラ17に設けてもよいが、少なくとも1つのローラ17を回転させることができれば、他のローラは追随して回転するので、1以上の数設ければよい。なお、図1に示す実施形態では、フレーム部材11を移動させるために1つのモータ18が設けられているが、1つのモータ18の動力では不足する場合、必要な数のモータを設けることができる。
【0046】
4つの光源13は、4つのLEDライトとされ、4つの撮影手段14は、4つのCCDカメラとされ、フレーム部材11の長手方向を形成する角パイプの中央の位置に取り付けられている。この場合、光源13および撮影手段14は、ケーブル21の外表面に対向して90°ごとに取り付けられることになる。ある1つの光源および撮影手段は、ケーブル21の周方向の−45°〜45°の範囲を中心として光を照射し、その範囲を撮影し、2つ目の光源および撮影手段は、周方向の45°〜135°の範囲を中心として光を照射し、その範囲を撮影し、3つ目の光源および撮影手段は、135°〜225°の範囲を中心として光を照射し、その範囲を撮影し、最後の4つ目の光源および撮影手段は、周方向の225°〜315°(−45°)の範囲を中心として光を照射し、その範囲を撮影する。
【0047】
光源13としては、電球や蛍光灯等を用いることも可能であるが、低消費電力、長寿命、小型であるLEDライトが好ましい。なお、光源13は、矩形の板によりフレーム部材11の側部が塞がれている場合は、ケーブル21の外表面の様子が見えにくくなることから、必要とされるが、側部が塞がれていない場合や透明板で塞がれている場合にはなくてもよい。ただし、ケーブル21の外表面を詳細に点検する場合、明るいほうが点検しやすいことから、光源13を設けることが望ましい。撮影手段14としては、フォトダイオードを用いるCCDイメージセンサやCMOSイメージセンサが搭載されたカメラを挙げることができる。これらのカメラは、撮影した画像を記録するための記憶装置を備えることができる。
【0048】
ここでは、4つの光源13および撮影手段14としたが、ケーブル21の周りを一周にわたって適切に撮影することができるのであれば、3つ以下とすることもできるし、より精度を高めるべく5つ以上とすることも可能である。例えば、フレーム部材11を中空円筒状に形成し、光源13および撮影手段14を、レール部材等を用いて周方向へ一回転できるように移動可能とされた構成にした場合、このように複数の光源および撮影手段を用いる必要はなく、1つの光源および撮影手段のみで点検を行うことも可能である。
【0049】
この点検装置は、故障等の時にこの装置を引っ張り、回収するために、フレーム部材11に連結されるワイヤをさらに備えることができる。また、この点検装置は、無線通信により信号を受信し、その信号に応答して、撮影手段14により撮影された画像の画像データを送信し、モータ18へローラ17を回転または停止させる信号を出力する制御手段をさらに備えることができる。制御手段は、CPU、メモリ、通信装置を備える制御回路とすることができる。
【0050】
このとき、点検装置は、アンテナにより信号を受信し、制御手段へ送ることができるが、その信号を送信するPC等からの距離が離れると、電波が届きにくくなることから、受信した電波を増幅するべくブースターを備えることができる。これら以外に、無線通信に必要な機器を、必要に応じて設けることができる。
【0051】
斜張橋のケーブルや送電線のような、斜めまたは水平に延びるケーブルである場合、単に走行支持手段12のみでケーブルに支持するのでは、この点検装置が回転し、せっかく検出した損傷位置が分からなくなってしまう場合がある。そこで、フレーム部材11の1箇所に錘を備え、ケーブルを中心として点検装置が回転しないように抑制することができる。図1に示す点検装置の場合、フレーム部材11の長手方向のケーブルの真下に位置する角管に錘を取り付けることで、装置の回転を抑制することができる。錘は、所定の質量、形状のものを角管の下側表面に接着剤等を用いて直接取り付けることもできるし、紐状物を介して取り付けてもよい。
【0052】
撮像手段14により撮影された損傷が生じている位置の特定は、後の補修工事において重要である。単に損傷部分を撮影するのみでは、後にその位置を見つけるのに時間を要することになる。そこで、ローラ17の少なくとも1つにエンコーダといったローラ17の回転数を計測し、その位置までの距離を算出するための距離計測手段をさらに備えることができる。なお、距離計測手段により計測された距離は、距離情報として撮影された画像とともに記録され、後の工事における損傷位置の特定の際に利用することができる。これにより、その損傷位置の特定が短時間で行えるようになる。
【0053】
上記の制御手段を備える場合は、その制御手段が撮影画像に計測された距離情報を関連付けて無線通信により作業員が使用するPC等へ送信し、表示画面上に撮影画像とともに距離を表示させ、それをデータとしてPC等の記憶装置に記憶することができる。
【0054】
ケーブル等の損傷位置に加えてその大きさも、後の補修工事において重要な情報である。本発明の点検装置では、ケーブル等の表面から各撮影手段14までの距離が、図1に示すように一定とされている。すると、焦点距離が一定となるため、撮影した画像を平面上に精度良く展開することができ、その結果、損傷の幅や長さ、面積をより高い精度で算出することができる。なお、ここでは、ケーブル等の表面から各撮影手段14までの距離を一定としているが、このような損傷の幅等を高い精度で算出する必要がなければ、一定でなくてもよいものである。
【0055】
撮影手段14は、動画による連続的な画像を取得することができる。LED照明の位置が固定されていることから、深い傷(ケーブルの長手方向と平行ではない損傷)である場合、影の位置が連続的に変化する画像となる。このため、動画から複数の静止画を切り出し、それらを用いて画像解析を行うことで損傷の深さを算出することができる。例えば、複数の静止画から三次元画像データを生成し、三次元画像データのデータ解析を行い、数値化することにより、損傷の深さを算出することができる。これらの処理はこれまでに知られたいかなる式やプログラムでも使用して行うことができる。
【0056】
また、距離計測手段を備える点検装置は、損傷位置や移動距離を計測することができることから、その計測が精度良く行うことができれば、単純に三角測量の原理により深さを求めることができる。具体的には、損傷箇所を介してケーブルの2点間の距離を正確に計測し、それらの点を結ぶ直線と、それらの点と損傷の最も深い箇所とを結ぶ直線とがなす角度を撮影画像から求め、これら角度と2つの位置間の距離から、その深さを求めることができる。
【0057】
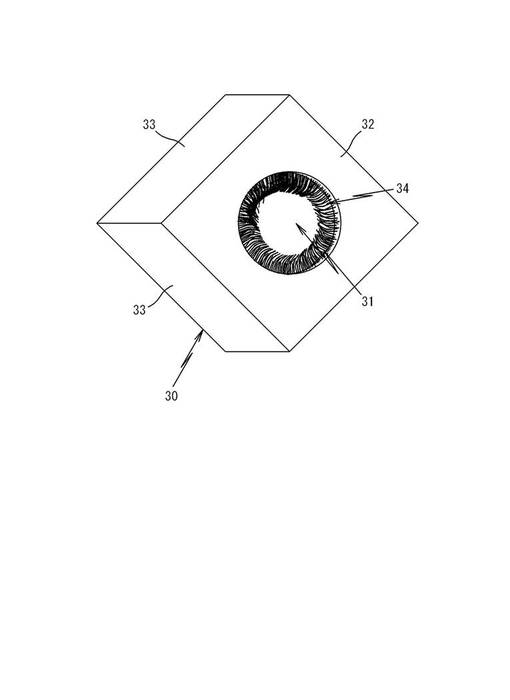
本発明の点検装置は、フレーム部材11の側部を板で塞ぎ、その両端に形成された開口10を大気へ開放した構成とすることができるが、この開口10を閉鎖するべくカバーを設けることも可能である。図3は、図1に示す点検装置に取り付けることができるカバーの一例を示した図である。
【0058】
カバー30は、フレーム部材11が挿嵌可能な形状、大きさとされていて、嵌め合わせることにより取り付けることができるものとされている。このカバー30も、ケーブル21が通される穴31が設けられ、フレーム部材11と同様、ケーブル21に取り付けるために2つに分離可能とされ、それらが図示しないジョイントにより連結される。
【0059】
図3では、カバー30は、フレーム部材11の端部の形状に合わせて、正方形とされ、中央にケーブル21が通る穴31が形成された第1の板32と、その第1の板32の各辺に連続し、第1の板32の面に対して垂直な面とされ、フレーム部材11を挿嵌させると、そのフレーム部材11の側部に隣接する4枚の第2の板33とから構成される。
【0060】
カバー30は、フレーム部材11から容易に外れないように、第2の板33の所定位置に嵌合溝または突起を設け、フレーム部材11のそれに対応した位置にも突起または嵌合溝を設けて嵌め合わせることができるようにすることが好ましい。また、フレーム部材11から容易に外れないように、これまでに知られたその他の機構を設けることも可能である。
【0061】
また、カバー30は、中央に設けられる穴31の中心に向けて延びるように、ケーブル21の外表面を清掃するためのブラシ34を設けることができる。ブラシ34は、第1の板32に円形に開けられた穴31の周部から中心へ向けて突出するように設けられる多数の細長い獣毛や繊維からなるものである。このブラシ34により、フレーム部材11を走行支持手段12により移動させる間に、ケーブル21の外表面に付着した土や砂等を取り除くことができる。なお、これらの土や砂等は、ブラシ34に付着し、カバー30内に堆積し、ケーブル21に取り付けた点検装置の下方の地面へと落下することにより、ケーブル21表面から取り除くことができる。
【0062】
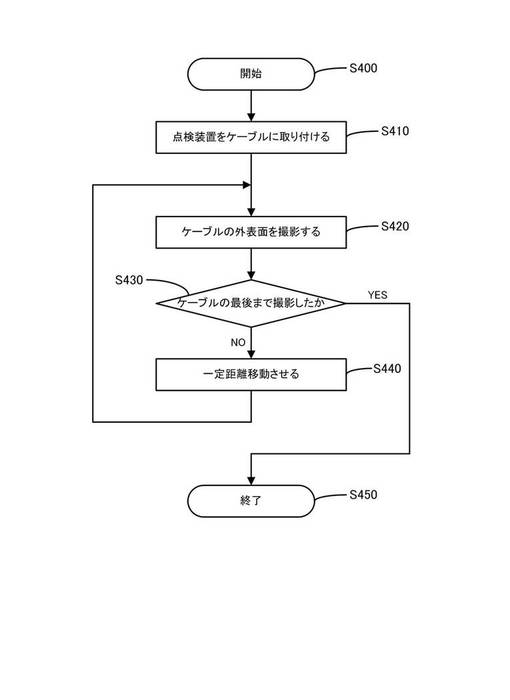
次に、上述した点検装置を使用してケーブル21の劣化状況やその位置を正確に把握するための点検方法について、図4に示すフローチャートを参照して詳細に説明する。ステップ400から開始し、まず、ステップ410において、ケーブル21に点検装置を取り付け、点検装置が備える走行支持手段12をケーブル21の外表面に当接させ、ケーブル21に支持させる。
【0063】
点検装置は、2方向に延びるジョイントを取り外すことで、走行支持手段12、光源13および撮影手段14が取り付けられたフレーム部材11を2つに分離し、上側のフレーム部材をケーブル21の上側へ移動させ、下側のフレーム部材をケーブル21の下側から移動させて、ジョイントを用いて連結することにより、ケーブル21がフレーム部材11の通路を通るように取り付けることができる。このようにして取り付けると、フレーム部材11から開口10の中心に向けて突出する走行支持手段12のゴムローラがケーブル21の外表面と当接し、そのゴムローラとケーブル21間の大きい摩擦抵抗によりフレーム部材11がケーブル21に支持される。
【0064】
次に、ステップ420において、フレーム部材11に取り付けられる、ケーブル21と周方向に対向して設けられる4つの光源13および撮影手段14により、ケーブル21の外表面に光を照射し、撮影する。撮影された画像は、画像データとして、撮影手段14が備える場合には記憶装置に格納され、また、無線通信等により作業員が使用するPC等へ送信される。
【0065】
ステップ420において、4つの撮影手段14によりケーブル21の周りに一周にわたってその外表面を撮影した後、ステップ430へ進み、ケーブル21の最後まで撮影したかを判断する。フレーム部材11がケーブル21の途中にある場合には、まだ撮影すべき箇所が存在するので、最後でないと判断し、ケーブル21の終端へ到達し、その位置で撮影が終了していれば、最後と判断する。この判断は、例えば、上記の制御手段が行うことができる。終端に到達した時点では撮影する必要があるが、その撮影後は、再度撮影する必要はないので、最後と判断し、撮影を終了する。
【0066】
最後ではないと判断した場合は、ステップ440へ進み、フレーム部材11をケーブル21の長さ方向へ一定距離だけ移動させる。この一定距離は、隣り合う画像がオーバーラップするような距離であればいかなる距離であってもよいが、出来るだけオーバーラップする部分が少ない方が撮影する画像数が少なくなり、記憶すべきデータ数も少なくなるので、メモリ使用量を減少させることができる点で好ましい。したがって、出来るだけオーバーラップが少なくなるような距離を予め決定しておき、その距離ほど移動させることができる。
【0067】
このようにして移動させた後、再びステップ420へ戻り、4つの光源13および撮影手段14を用いて、ケーブル21の外表面を撮影する。そして、ステップ430で最後まで撮影したかを判断する。したがって、ケーブル21の終端に到達し、その終端での撮影が終了するまでは、ステップ420〜440までの処理が繰り返し行われる。
【0068】
一方、ステップ430で最後と判断した場合は、撮影すべき部分がこのケーブル21にはないので、ステップ450へ進み、点検を終了する。これでケーブル1本の点検が終了する。まだ点検していないケーブルが存在する場合は、再びステップ400から処理を開始し、同様の点検を行う。
【0069】
これまで本発明の点検装置および点検方法について図面に示した実施形態を参照しながら詳細に説明してきたが、本発明は、上述した実施形態に限定されるものではなく、他の実施形態や、追加、変更、削除など、当業者が想到することができる範囲内で変更することができ、いずれの態様においても本発明の作用・効果を奏する限り、本発明の範囲に含まれるものである。
【符号の説明】
【0070】
10…開口、11…フレーム部材、12…走行支持手段、13…光源、14…撮影手段、15…ジョイント、16…ローラ支持部、17…ローラ、18…モータ、20…主塔、21…ケーブル、22…主桁、23…主塔、24…アンカーレッジ、25…メインケーブル、26…ハンガーロープ、27…橋桁、30…カバー、31…穴、32…第1の板、33…第2の板、34…ブラシ
【技術分野】
【0001】
本発明は、ケーブルやワイヤ等の点検を行う自走式の点検装置およびその点検方法に関する。
【背景技術】
【0002】
送電線等のケーブルは、自然災害、鳥獣や人的行為により、損傷を受けることがあり、これを放置しておくと、ケーブルの断線、絶縁不良等の障害の原因となることから、定期的な点検が必要とされている。これまでは、電気的な測定により障害のあるルートの特定をし、その障害箇所については最終的にケーブル外皮を目視により特定している。
【0003】
その方法として、電柱に登り、目視により検査を行う方法、ケーブルに梯子をかけ、その梯子を昇り、目視により検査を行う方法、宙乗り器をケーブルにかけ、その宙乗り器に作業員が乗り、それを移動させながら、目視により検査を行う方法、高所作業車に設けられたバケットに作業員が乗り、それをケーブルに接近させ、そのバケットから目視により検査を行う方法のいずれかが採用されている。
【0004】
しかしながら、これらの方法では、高所作業のため、作業員に危険が伴い、1回の検査による検査範囲が限定され、電柱間の部分のケーブルの検査を行うことができないという問題があった。また、高所作業車を駐車できない場所では使用できず、駐車できるにしても、他の通行を妨げる等の問題もあった。
【0005】
そこで、地上から昇降器によりケーブル外被観測装置を空中に配線された架空ケーブルに乗せ、地上から制御手段による遠隔操作で架空ケーブル上を移動させながら、カメラで架空ケーブルの所望箇所の外観を撮影しつつ、その外観映像を表示手段に表示させ、架空ケーブルの外被状態を検査するケーブル外被観測装置が提案されている(例えば、特許文献1参照)。このように、遠隔操作により架空ケーブルの外観を撮影し、映像として検査することにより、架空ケーブル下の環境に影響をされず、安全かつ連続的に架空ケーブルの外被状態を検査することができる。
【0006】
ケーブルは、送電線に限られるものではなく、斜張橋や吊り橋等にも使用されている。斜張橋は、主塔から真っ直ぐに張られているケーブルが直接橋桁を支え、吊り橋は、主塔間に撓むようにケーブルが設けられ、そのケーブルにぶら下がるハンガーロープにより橋桁を支える構造とされている。ケーブルやハンガーロープの損傷は、橋桁が落下するという危険性があることから、定期的な点検が必要とされている。
【0007】
このケーブルの点検方法として、主塔の塔頂にロープをセットし、その塔頂から降下し、ケーブルまで到達したところで、滑車をケーブルに取り付け、ハーネスと繋ぎ、この滑車を利用してケーブルに沿って安全かつスムーズに下降し、ケーブルの劣化を近接目視、直接観察する方法が採用されている。
【0008】
また、クレーンが届く位置では、クレーンを使用し、クレーンの先に設けられたバケットに作業員が乗り、それをケーブルに接近させ、そのバケットから目視により検査を行う方法や、クレーンが届かない位置については、地上あるいは主塔頂上部等から望遠鏡で遠望目視により点検を行う方法も採用されている。
【0009】
しかしながら、クレーンによる点検は、通行止めにする必要があり、クレーンの移動が必要であるため、時間がかかり、コストもかかる。また、高所作業であるため、安全性に問題がある。遠望目視による点検は、激しい劣化しか検出することができず、その激しい劣化を検出した場合でも、その位置を正確に特定することができない。また、劣化状況を写真等により記録することができず、ケーブルの周りを一周にわたって点検することができない場合があり、主塔頂上部からの点検では安全性に問題があった。
【先行技術文献】
【特許文献】
【0010】
【特許文献1】特開平7−260453号公報
【発明の概要】
【発明が解決しようとする課題】
【0011】
そこで、斜張橋や吊り橋等のケーブルも、送電線等のケーブルのように、遠隔操作により、そのケーブルの外観を撮影し、映像として検査することで、劣化状況を写真等により記録することができ、安全性も確保することができる。
【0012】
しかしながら、特許文献1に記載の方法では、遠隔操作によりケーブルの外観を撮影し、映像により検査を行うにしても、カメラの視線をケーブルに対して三次元的に移動させるカメラ支持部およびアームおよびモータからなるカメラ移動部、カメラ移動部をケーブルに沿って移動させる駆動部、それらをケーブルに乗せる昇降器を備える必要があることから、安価で提供することはできず、その移動にも時間がかかり、ケーブルの周りを一周にわたって点検することは難しいという問題がある。また、このような大掛かりなアームを使用した撮影装置では、その撮影位置を簡単に制御することができないという問題もある。
【0013】
そこで、ケーブルの周りを一周にわたって簡単な制御で点検することができ、また、その点検も短時間で行うことができ、さらには安価で提供することができる装置の提供が望まれていた。
【課題を解決するための手段】
【0014】
本発明は、上記課題に鑑みてなされたものであり、電柱やケーブルといった円筒体または綱状物が通される通路を有するフレーム部材と、フレーム部材の長手方向の両端に形成され通路に連続する開口の中心に向けて該フレーム部材から突出するように設けられ、通路を通された円筒体または綱状物の外表面に当接して、フレーム部材を円筒体または綱状物に支持するとともに、フレーム部材を円筒体または綱状物の長さ方向へ移動させることが可能な走行支持手段と、フレーム部材に円筒体または綱状物と周方向に対向して取り付けられる複数の撮影手段とを含む、円筒体または綱状物の点検装置が提供される。
【0015】
フレーム部材は、円筒体等へ取り付けるために2つに分離可能とされ、それらを連結するためのジョイントを用いて連結される。このフレーム部材は、断面が矩形の角管と、角管同士を連結するための、角管と嵌合する嵌合部を備えるジョイントを用いて構成することができる。また、フレーム部材は、角管およびジョイントにより形成された両端の開口を除く、角管およびジョイントにより形成される側部の開口を塞ぐように矩形の板を取り付けたものとすることができる。その板としては、内部の様子を望遠鏡等により視認することができるように、透明板を用いることができる。
【0016】
また、フレーム部材は、両端の開口を覆うカバーを備えることができ、カバーは、円筒体または綱状物が挿通可能な穴を有し、穴の中心へ向けて突出するように設けられ、円筒体または綱状物の外表面を清掃するブラシを備えることができる。
【0017】
走行支持手段は、フレーム部材の開口が形成された各端部に設けられ、開口の中心に向けて突出する少なくとも3つのローラ支持部と、各ローラ支持部により回転可能に支持され、円筒体または綱状物の外表面と当接する少なくとも3つのローラと、少なくとも1つのローラを回転させる動力手段とを備える。
【0018】
複数の撮影手段は、例えば、4つの撮影手段から構成され、円筒体または綱状物と周方向に対向して90°ごとに取り付けることができる。フレーム部材が上記の板を取り付けたものとされる場合、複数の撮影手段は、フレーム部材の内部に設置されることになり、円筒体または綱状物の外表面の様子が見えにくくなる。このため、複数の撮影手段の各々に近隣して設けられ、撮影手段が撮影する範囲に光を照射するための複数の光源を設けることができる。
【0019】
また、点検装置は、故障等の時にこの装置を引っ張り、回収するために、フレーム部材に連結されるワイヤをさらに備えることができる。この点検装置は、無線通信により信号を受信し、その信号に応答して、撮影手段により撮影された画像の画像データを送信し、動力手段へローラを回転または停止させる信号を出力する制御手段をさらに備えることができる。
【0020】
円筒体または綱状物が斜めまたは水平に延びるケーブルである場合、上記の構成では装置が回転し、損傷位置が分からなくなる場合がある。そこで、フレーム部材の1箇所に錘を備え、そのケーブルを中心として装置が回転しないように抑制することが好ましい。
【0021】
損傷位置の特定は、後の補修工事において重要である。単に損傷部分を撮影するのみでは、後にその位置を見つけるのに時間を要することになる。そこで、ローラにエンコーダといったローラの回転数を計測し、その位置までの距離を算出するための距離計測手段をさらに備えることが好ましい。計測された距離は、距離情報として撮影画像とともに記録され、後の工事における損傷位置の特定の際に利用することができる。これにより、その損傷位置の特定が短時間で行えるようになる。
【0022】
本発明では、上記の円筒体または綱状物の点検装置のほか、その点検装置により行われる点検方法も提供することができる。この点検方法は、長手方向の両端に形成される開口と該開口に連続する通路を有するフレーム部材を、円筒体または綱状物が通路を通るように該円筒体または綱状物に取り付け、開口の中心に向けてフレーム部材から突出するように設けられる走行支持手段を、通路を通された円筒体または綱状物の外表面に当接させ、フレーム部材を円筒体または綱状物に支持させるステップと、フレーム部材に円筒体または綱状物と周方向に対向して取り付けられた複数の撮影手段により、円筒体または綱状物の外表面を撮影するステップと、走行支持手段によりフレーム部材を円筒体または綱状物の長さ方向へ移動させるステップとを含む。また、この点検方法は、円筒体または綱状物の最後まで撮影したかを判断するステップを含み、最後まで撮影していないと判断した場合に、上記移動させるステップと上記撮影するステップとを実行させる。
【発明の効果】
【0023】
本発明の点検装置および点検方法を提供することにより、ケーブルが斜め方向に延びる場合であっても点検を行うことができ、また、近接撮影することができるため、微細な劣化も発見することができる。また、作業員が離れた場所で劣化状況やその位置を把握することができるため、安全性を向上させることができる。
【0024】
この点検装置は、小型の装置であり、それを支持するためのアームや昇降器等が不要で、それを移動させるための車両も不要であるため、作業の間、車両を通行止めにする必要がなくなる。また、アームや昇降器、車両が不要であるため、安価で提供することができ、安価に点検を行うことができる。
【0025】
また、この点検装置は、その状況を撮影画像の電子データとして保管することができ、これにより、再度確認することができ、適切な対策に役立てることができる。
【0026】
ケーブル等の損傷の大きさは、その位置とともに後の補修工事において重要な情報であるが、本発明の点検装置は、ケーブル等の表面から各撮影手段までの距離が一定で、焦点距離が一定となるため、撮影した画像を平面上に精度良く展開することができ、損傷の幅や長さ、面積をより高い精度で算出することができる。
【0027】
また、撮影手段は、動画による連続的な画像を取得することができるが、この動画から切り出した複数の静止画を用いて画像解析を行うことにより、損傷の深さも算出することが可能となる。距離計測手段を備える点検装置は、損傷位置や移動距離を計測することができることから、その計測が精度良く行うことができれば、単純に三角測量の原理により深さを求めることも可能となる。
【図面の簡単な説明】
【0028】
【図1】本発明の点検装置の構成例を示した図。
【図2】斜張橋および吊り橋を例示した図。
【図3】本発明の点検装置に用いられるカバーを例示した図。
【図4】本発明の点検方法の流れを示したフローチャート図。
【発明を実施するための形態】
【0029】
図1は、本発明の点検装置の構成例を示した図である。図1に示した実施形態は、1つの構成例であるので、本発明は、この実施形態に限定されるものでない。
【0030】
本発明の点検装置は、円筒体または綱状物の損傷を検出するための自走式の点検ロボットである。点検対象となる円筒体としては、電柱、水道管、排水管、ガス管等を挙げることができ、綱状物としては、送電線等の電気ケーブル、光ファイバーケーブル等の通信ケーブル、斜張橋の主桁を支えるために主塔から斜め方向へまっすぐに張られるケーブル、吊り橋の橋桁を支えるために主塔間に張られるメインケーブルおよびメインケーブルと橋桁とを繋ぐハンガーロープ等を挙げることができる。
【0031】
ここで、斜張橋および吊り橋について図2(a)および(b)を参照して簡単に説明する。これらの橋は、橋の両端の距離が200mを超す場合に選択されることが多い橋である。斜張橋は、図2(a)に示すように、川や海の底に基礎が構築され、その基礎上に、鋼や鉄筋コンクリート(RC)により主塔20が構築され、この主塔20から斜め方向へ張られたケーブル21により主桁22を直接支える構造とされている。主塔20は、2本であることが多いが、1本や3本以上とされる場合もある。この主塔20には、圧縮力のみが作用する。
【0032】
ケーブル21は、主塔20と主桁22を繋ぎ、主桁22を支える。このケーブル21は、主塔20を挟んで左右に張られ、左右にかかる力のバランスをとり、また、本数を多くすることにより、ケーブル一本あたりに作用する力を小さくしている。主桁22は、人や車が通行する部分である。
【0033】
吊り橋は、図2(b)に示すように、川や海の底に基礎が構築され、その基礎上に、鋼や鉄筋コンクリートにより主塔23が構築され、橋の両岸にはアンカーレッジ24と呼ばれる土台が構築され、メインケーブル25が、主塔23とアンカーレッジ24との間、主塔23間に張られ、そのメインケーブル25から垂らされるハンガーロープ26により橋桁27を支える構造とされている。
【0034】
主塔23は、メインケーブル25を支える塔で、両岸から全長の約1/4の位置に2本設けられる。アンカーレッジ24は、橋の両端にあり、メインケーブル25を繋ぎ止める碇の役割を果たすものである。メインケーブル25は、主塔23に架けられ、鋼製のワイヤが用いられる。ハンガーロープ26は、メインケーブル25から鉛直に垂らされ、橋桁27を支えるもので、その位置により長さが異なり、撚ったワイヤロープが用いられる。橋桁27は、道路や鉄道が設けられ、人や車両等が通行する部分である。
【0035】
以下、本発明の点検装置を、図2(a)に示す斜張橋のケーブル21の劣化状況やその位置を正確に把握するための点検装置として詳細に説明する。再び図1を参照して、この点検装置は、ケーブル21が通される通路を備えるフレーム部材11と、フレーム部材11の長手方向の両端に形成され、その通路に連続する開口10の中心に向けてフレーム部材11から突出するように設けられ、その通路を通されたケーブル21の外表面に当接して、フレーム部材11をケーブル21に支持するとともに、フレーム部材11をケーブル21の長さ方向へ移動させることが可能な走行支持手段12と、フレーム部材11に、ケーブル21と周方向に対向して取り付けられる4つの光源13および4つの撮影手段14とを含んで構成されている。
【0036】
フレーム部材11は、図1に示すようなアルミニウム製の角管を複数用い、角管に嵌合される嵌合部が3方向に延びる三方向ジョイント15により連結して形成することができる。このジョイント15は、互いに垂直なx軸、y軸、z軸という3方向に嵌合部が延びているものである。角管は、断面矩形で中空とされていて、ジョイント15は、先端に行くにつれてわずかにテーパが形成されていて、押し込まれることにより断面の大きい末端が角管の内面に強く密着して、強い締結力を生じさせるものである。
【0037】
例えば、長さ430mmの角管を8本と、長さ500mmの角管を4本用い、上記のジョイント15を8つ用いて連結し、図1に示すようなフレーム部材11を作ることができる。この場合、長さ430mmの8本の角管により2つの開口10が形成され、それらを両端に配置し、長さ500mmの4本の角管により接続することにより、その内部にケーブル21が通る通路が形成される。
【0038】
また、フレーム部材11は、下側に配置される4本の長さ430mmの角管を、例えば、切断部Aで100mmと330mmの2つに切断し、それらを2方向に延びる図示しない二方向ジョイントを用いて連結するように構成する。このジョイントは、180°異なる方向へ嵌合部が延びているものである。このジョイントを取り外し、連結を解除することにより、フレーム部材11を2つに分離することができ、フレーム部材11内へ入れ、再びそのジョイントにより連結することで、ケーブル21が通路を通るように、ケーブル21にフレーム部材11を取り付けることができる。
【0039】
角管により作成されたフレーム部材11は、その側部にも開口を4つ有しているが、その側部の開口を矩形の板により塞ぎ、雨天であっても光源13や撮影手段14が濡れることはなく、点検作業を実施することができるようにすることができる。この矩形の板としては、プラスチック樹脂の板や木板等を用いることができる。プラスチック樹脂としては、ポリ塩化ビニル、ポリエチレン、ポリプロピレン、ABS樹脂(アクリロニトリルブタジエンスチレン樹脂)等を用いることができる。また、内部の様子を望遠鏡等により視認することができるように、透明な板により形成することができる。透明な板としては、強度を考慮して、アクリル板を採用することができる。これらの板は、接着剤やドリルねじ等を使用して角管に接着、連結することができる。
【0040】
角管を用いなくても、4枚の矩形の板のみを使用し、それらを接合して箱状に形成したものをフレーム部材11として用いることも可能である。また、フレーム部材11は、この箱状のものに限らず、円筒状のものであってもよい。このように箱状あるいは円筒状に形成されたフレーム部材11は、一方の開口から内部を通して他方の開口へと連続する穴を形成し、その穴がケーブル21を通すための通路とされる。この場合も、ケーブル21を内部へ入れる必要があることから、下側に接合される板を2つに切断し、その2つを連結手段により連結するように構成される。ここで使用される連結手段としては、これまでに知られたいかなる手段でも用いることができ、例えば、上記のような2方向に嵌合部が延びるジョイントを複数用いて連結することができる。
【0041】
走行支持手段12は、これに限られるものではないが、フレーム部材11の長手方向の両端に形成された開口10、上記の例で具体的に言えば、4本の430mmの角管をジョイント15により連結して形成された開口10の中心に向けて、そのフレーム部材11の端部、これも具体的に言えば、フレーム部材11の端部を構成するそれら4本の430mmの角管から突出するように4つずつ設けられたローラ支持部16と、各ローラ支持部16により回転可能に支持され、ケーブル21の外表面と当接する、ローラ支持部16と同じ数のローラ17と、1つのローラ17を回転させる動力手段としてのモータ18とを含んで構成される。
【0042】
ローラ支持部16は、フレーム部材11から開口10の中心に向けて突出するように互いに離間して設けられ、その先端にローラ17の回転軸が挿入可能な凹部または孔が形成された2本のアームから構成される。これらのアームは、伸縮可能とし、ケーブルの径に合わせて調整することができるようにされていてもよい。ローラ17は、回転軸と、その回転軸を中心として、それに周設される円筒形の接触部とから構成される。回転軸は、接触部からその長手方向へ突出していて、その両端部は、上記のアームの凹部に嵌合またはアームの孔に挿入され、ローラ17を回転可能にしている。モータ18は、図示しない制御手段からの指示、すなわち信号の入力によりローラ17を所定の回転数で回転させる。
【0043】
ローラ支持部16およびローラ17の回転軸は、プラスチック樹脂や、鋼やアルミニウム等の金属により形成することができるが、強度の点から金属のほうが好ましい。ローラ17の接触部は、ケーブル21の外表面と当接し、フレーム部材11をケーブル21に支持することから、密着性が良好で、ケーブル21外表面との摩擦抵抗が大きいほうが好ましく、例えば、弾性材料から形成することができる。弾性材料としては、ゴムを挙げることができ、天然ゴム、イソプレンゴムやウレタンゴムやクロロプレンゴム等の合成ゴムを用いることができる。
【0044】
図1に示す実施形態では、ローラ支持部16およびローラ17は、フレーム部材11の一方の端部に4つ設けられ、他方の端部にも4つ設けられ、合計8つ設けられている。しかしながら、ケーブル21にフレーム部材11を適切に支持することができ、ケーブル21の長さ方向へフレーム部材11を移動させることができれば、合計8つ設ける必要はなく、各端部に3つずつ設ける構成であってもよい。また、それ以上の数設けてもよい。
【0045】
動力手段としてのモータ18は、各ローラ17に設けてもよいが、少なくとも1つのローラ17を回転させることができれば、他のローラは追随して回転するので、1以上の数設ければよい。なお、図1に示す実施形態では、フレーム部材11を移動させるために1つのモータ18が設けられているが、1つのモータ18の動力では不足する場合、必要な数のモータを設けることができる。
【0046】
4つの光源13は、4つのLEDライトとされ、4つの撮影手段14は、4つのCCDカメラとされ、フレーム部材11の長手方向を形成する角パイプの中央の位置に取り付けられている。この場合、光源13および撮影手段14は、ケーブル21の外表面に対向して90°ごとに取り付けられることになる。ある1つの光源および撮影手段は、ケーブル21の周方向の−45°〜45°の範囲を中心として光を照射し、その範囲を撮影し、2つ目の光源および撮影手段は、周方向の45°〜135°の範囲を中心として光を照射し、その範囲を撮影し、3つ目の光源および撮影手段は、135°〜225°の範囲を中心として光を照射し、その範囲を撮影し、最後の4つ目の光源および撮影手段は、周方向の225°〜315°(−45°)の範囲を中心として光を照射し、その範囲を撮影する。
【0047】
光源13としては、電球や蛍光灯等を用いることも可能であるが、低消費電力、長寿命、小型であるLEDライトが好ましい。なお、光源13は、矩形の板によりフレーム部材11の側部が塞がれている場合は、ケーブル21の外表面の様子が見えにくくなることから、必要とされるが、側部が塞がれていない場合や透明板で塞がれている場合にはなくてもよい。ただし、ケーブル21の外表面を詳細に点検する場合、明るいほうが点検しやすいことから、光源13を設けることが望ましい。撮影手段14としては、フォトダイオードを用いるCCDイメージセンサやCMOSイメージセンサが搭載されたカメラを挙げることができる。これらのカメラは、撮影した画像を記録するための記憶装置を備えることができる。
【0048】
ここでは、4つの光源13および撮影手段14としたが、ケーブル21の周りを一周にわたって適切に撮影することができるのであれば、3つ以下とすることもできるし、より精度を高めるべく5つ以上とすることも可能である。例えば、フレーム部材11を中空円筒状に形成し、光源13および撮影手段14を、レール部材等を用いて周方向へ一回転できるように移動可能とされた構成にした場合、このように複数の光源および撮影手段を用いる必要はなく、1つの光源および撮影手段のみで点検を行うことも可能である。
【0049】
この点検装置は、故障等の時にこの装置を引っ張り、回収するために、フレーム部材11に連結されるワイヤをさらに備えることができる。また、この点検装置は、無線通信により信号を受信し、その信号に応答して、撮影手段14により撮影された画像の画像データを送信し、モータ18へローラ17を回転または停止させる信号を出力する制御手段をさらに備えることができる。制御手段は、CPU、メモリ、通信装置を備える制御回路とすることができる。
【0050】
このとき、点検装置は、アンテナにより信号を受信し、制御手段へ送ることができるが、その信号を送信するPC等からの距離が離れると、電波が届きにくくなることから、受信した電波を増幅するべくブースターを備えることができる。これら以外に、無線通信に必要な機器を、必要に応じて設けることができる。
【0051】
斜張橋のケーブルや送電線のような、斜めまたは水平に延びるケーブルである場合、単に走行支持手段12のみでケーブルに支持するのでは、この点検装置が回転し、せっかく検出した損傷位置が分からなくなってしまう場合がある。そこで、フレーム部材11の1箇所に錘を備え、ケーブルを中心として点検装置が回転しないように抑制することができる。図1に示す点検装置の場合、フレーム部材11の長手方向のケーブルの真下に位置する角管に錘を取り付けることで、装置の回転を抑制することができる。錘は、所定の質量、形状のものを角管の下側表面に接着剤等を用いて直接取り付けることもできるし、紐状物を介して取り付けてもよい。
【0052】
撮像手段14により撮影された損傷が生じている位置の特定は、後の補修工事において重要である。単に損傷部分を撮影するのみでは、後にその位置を見つけるのに時間を要することになる。そこで、ローラ17の少なくとも1つにエンコーダといったローラ17の回転数を計測し、その位置までの距離を算出するための距離計測手段をさらに備えることができる。なお、距離計測手段により計測された距離は、距離情報として撮影された画像とともに記録され、後の工事における損傷位置の特定の際に利用することができる。これにより、その損傷位置の特定が短時間で行えるようになる。
【0053】
上記の制御手段を備える場合は、その制御手段が撮影画像に計測された距離情報を関連付けて無線通信により作業員が使用するPC等へ送信し、表示画面上に撮影画像とともに距離を表示させ、それをデータとしてPC等の記憶装置に記憶することができる。
【0054】
ケーブル等の損傷位置に加えてその大きさも、後の補修工事において重要な情報である。本発明の点検装置では、ケーブル等の表面から各撮影手段14までの距離が、図1に示すように一定とされている。すると、焦点距離が一定となるため、撮影した画像を平面上に精度良く展開することができ、その結果、損傷の幅や長さ、面積をより高い精度で算出することができる。なお、ここでは、ケーブル等の表面から各撮影手段14までの距離を一定としているが、このような損傷の幅等を高い精度で算出する必要がなければ、一定でなくてもよいものである。
【0055】
撮影手段14は、動画による連続的な画像を取得することができる。LED照明の位置が固定されていることから、深い傷(ケーブルの長手方向と平行ではない損傷)である場合、影の位置が連続的に変化する画像となる。このため、動画から複数の静止画を切り出し、それらを用いて画像解析を行うことで損傷の深さを算出することができる。例えば、複数の静止画から三次元画像データを生成し、三次元画像データのデータ解析を行い、数値化することにより、損傷の深さを算出することができる。これらの処理はこれまでに知られたいかなる式やプログラムでも使用して行うことができる。
【0056】
また、距離計測手段を備える点検装置は、損傷位置や移動距離を計測することができることから、その計測が精度良く行うことができれば、単純に三角測量の原理により深さを求めることができる。具体的には、損傷箇所を介してケーブルの2点間の距離を正確に計測し、それらの点を結ぶ直線と、それらの点と損傷の最も深い箇所とを結ぶ直線とがなす角度を撮影画像から求め、これら角度と2つの位置間の距離から、その深さを求めることができる。
【0057】
本発明の点検装置は、フレーム部材11の側部を板で塞ぎ、その両端に形成された開口10を大気へ開放した構成とすることができるが、この開口10を閉鎖するべくカバーを設けることも可能である。図3は、図1に示す点検装置に取り付けることができるカバーの一例を示した図である。
【0058】
カバー30は、フレーム部材11が挿嵌可能な形状、大きさとされていて、嵌め合わせることにより取り付けることができるものとされている。このカバー30も、ケーブル21が通される穴31が設けられ、フレーム部材11と同様、ケーブル21に取り付けるために2つに分離可能とされ、それらが図示しないジョイントにより連結される。
【0059】
図3では、カバー30は、フレーム部材11の端部の形状に合わせて、正方形とされ、中央にケーブル21が通る穴31が形成された第1の板32と、その第1の板32の各辺に連続し、第1の板32の面に対して垂直な面とされ、フレーム部材11を挿嵌させると、そのフレーム部材11の側部に隣接する4枚の第2の板33とから構成される。
【0060】
カバー30は、フレーム部材11から容易に外れないように、第2の板33の所定位置に嵌合溝または突起を設け、フレーム部材11のそれに対応した位置にも突起または嵌合溝を設けて嵌め合わせることができるようにすることが好ましい。また、フレーム部材11から容易に外れないように、これまでに知られたその他の機構を設けることも可能である。
【0061】
また、カバー30は、中央に設けられる穴31の中心に向けて延びるように、ケーブル21の外表面を清掃するためのブラシ34を設けることができる。ブラシ34は、第1の板32に円形に開けられた穴31の周部から中心へ向けて突出するように設けられる多数の細長い獣毛や繊維からなるものである。このブラシ34により、フレーム部材11を走行支持手段12により移動させる間に、ケーブル21の外表面に付着した土や砂等を取り除くことができる。なお、これらの土や砂等は、ブラシ34に付着し、カバー30内に堆積し、ケーブル21に取り付けた点検装置の下方の地面へと落下することにより、ケーブル21表面から取り除くことができる。
【0062】
次に、上述した点検装置を使用してケーブル21の劣化状況やその位置を正確に把握するための点検方法について、図4に示すフローチャートを参照して詳細に説明する。ステップ400から開始し、まず、ステップ410において、ケーブル21に点検装置を取り付け、点検装置が備える走行支持手段12をケーブル21の外表面に当接させ、ケーブル21に支持させる。
【0063】
点検装置は、2方向に延びるジョイントを取り外すことで、走行支持手段12、光源13および撮影手段14が取り付けられたフレーム部材11を2つに分離し、上側のフレーム部材をケーブル21の上側へ移動させ、下側のフレーム部材をケーブル21の下側から移動させて、ジョイントを用いて連結することにより、ケーブル21がフレーム部材11の通路を通るように取り付けることができる。このようにして取り付けると、フレーム部材11から開口10の中心に向けて突出する走行支持手段12のゴムローラがケーブル21の外表面と当接し、そのゴムローラとケーブル21間の大きい摩擦抵抗によりフレーム部材11がケーブル21に支持される。
【0064】
次に、ステップ420において、フレーム部材11に取り付けられる、ケーブル21と周方向に対向して設けられる4つの光源13および撮影手段14により、ケーブル21の外表面に光を照射し、撮影する。撮影された画像は、画像データとして、撮影手段14が備える場合には記憶装置に格納され、また、無線通信等により作業員が使用するPC等へ送信される。
【0065】
ステップ420において、4つの撮影手段14によりケーブル21の周りに一周にわたってその外表面を撮影した後、ステップ430へ進み、ケーブル21の最後まで撮影したかを判断する。フレーム部材11がケーブル21の途中にある場合には、まだ撮影すべき箇所が存在するので、最後でないと判断し、ケーブル21の終端へ到達し、その位置で撮影が終了していれば、最後と判断する。この判断は、例えば、上記の制御手段が行うことができる。終端に到達した時点では撮影する必要があるが、その撮影後は、再度撮影する必要はないので、最後と判断し、撮影を終了する。
【0066】
最後ではないと判断した場合は、ステップ440へ進み、フレーム部材11をケーブル21の長さ方向へ一定距離だけ移動させる。この一定距離は、隣り合う画像がオーバーラップするような距離であればいかなる距離であってもよいが、出来るだけオーバーラップする部分が少ない方が撮影する画像数が少なくなり、記憶すべきデータ数も少なくなるので、メモリ使用量を減少させることができる点で好ましい。したがって、出来るだけオーバーラップが少なくなるような距離を予め決定しておき、その距離ほど移動させることができる。
【0067】
このようにして移動させた後、再びステップ420へ戻り、4つの光源13および撮影手段14を用いて、ケーブル21の外表面を撮影する。そして、ステップ430で最後まで撮影したかを判断する。したがって、ケーブル21の終端に到達し、その終端での撮影が終了するまでは、ステップ420〜440までの処理が繰り返し行われる。
【0068】
一方、ステップ430で最後と判断した場合は、撮影すべき部分がこのケーブル21にはないので、ステップ450へ進み、点検を終了する。これでケーブル1本の点検が終了する。まだ点検していないケーブルが存在する場合は、再びステップ400から処理を開始し、同様の点検を行う。
【0069】
これまで本発明の点検装置および点検方法について図面に示した実施形態を参照しながら詳細に説明してきたが、本発明は、上述した実施形態に限定されるものではなく、他の実施形態や、追加、変更、削除など、当業者が想到することができる範囲内で変更することができ、いずれの態様においても本発明の作用・効果を奏する限り、本発明の範囲に含まれるものである。
【符号の説明】
【0070】
10…開口、11…フレーム部材、12…走行支持手段、13…光源、14…撮影手段、15…ジョイント、16…ローラ支持部、17…ローラ、18…モータ、20…主塔、21…ケーブル、22…主桁、23…主塔、24…アンカーレッジ、25…メインケーブル、26…ハンガーロープ、27…橋桁、30…カバー、31…穴、32…第1の板、33…第2の板、34…ブラシ
【特許請求の範囲】
【請求項1】
円筒体または綱状物の劣化状況を点検するための点検装置であって、
前記円筒体または綱状物が通される通路を有するフレーム部材と、
前記フレーム部材の長手方向の両端に形成され前記通路に連続する開口の中心に向けて突出するように設けられ、前記通路を通された前記円筒体または綱状物の外表面に当接して、前記フレーム部材を前記円筒体または綱状物に支持するとともに、前記フレーム部材を前記円筒体または綱状物の長さ方向へ移動させることが可能な走行支持手段と、
前記フレーム部材に、前記円筒体または綱状物と周方向に対向して取り付けられる複数の撮影手段とを含む、点検装置。
【請求項2】
前記フレーム部材は、前記円筒体または綱状物を中心として前記点検装置が回転しないように錘を備える、請求項1に記載の点検装置。
【請求項3】
前記点検装置が移動した距離を計測する距離計測手段をさらに備える、請求項1または2に記載の点検装置。
【請求項4】
前記複数の撮影手段は、前記周方向に一定間隔で離間して取り付けられ、前記円筒体または綱状物の表面からの距離が同じ距離とされる、請求項1〜3のいずれか1項に記載の点検装置。
【請求項5】
前記走行支持手段は、前記フレーム部材の前記開口が形成された各端部に設けられ、前記開口の中心に向けて突出する少なくとも3つのローラ支持部と、各前記ローラ支持部により回転可能に支持され、前記円筒体または綱状物の外表面と当接する少なくとも3つのローラと、少なくとも1つの前記ローラを回転させる動力手段とを含む、請求項1〜4のいずれか1項に記載の点検装置。
【請求項6】
前記フレーム部材は、複数の断面が矩形の角管と、前記角管と嵌合する嵌合部を備える複数のジョイントと、複数の矩形の透明板とを用いて形成される、請求項1〜5のいずれか1項に記載の点検装置。
【請求項7】
前記点検装置は、前記複数の撮影手段の各々に近隣して設けられ、前記撮影手段が撮影する範囲に光を照射するための複数の光源をさらに備える、請求項1〜6のいずれか1項に記載の点検装置。
【請求項8】
前記フレーム部材の両端に形成された前記開口を覆うためのカバーを備え、前記カバーは、前記円筒体または綱状物が挿通可能な穴を有し、前記穴の中心へ向けて突出するように設けられ、前記円筒体または綱状物の外表面を清掃するブラシを備える、請求項1〜7のいずれか1項に記載の点検装置。
【請求項9】
前記フレーム部材に連結されるワイヤをさらに備える、請求項1〜8のいずれか1項に記載の点検装置。
【請求項10】
無線通信により信号を受信し、前記信号に応答して、前記撮影手段により撮影された画像の画像データを送信し、または前記動力手段へ前記ローラを回転もしくは停止させる信号を出力する制御手段をさらに備える、請求項5に記載の点検装置。
【請求項11】
点検装置を用い、円筒体または綱状物の劣化状況を点検する点検方法であって、
前記点検装置の長手方向の両端に形成される開口と該開口に連続する通路を有するフレーム部材を、前記円筒体または綱状物が通路を通るように該円筒体または綱状物に取り付け、前記開口の中心に向けて前記フレーム部材から突出するように設けられる走行支持手段を、前記通路を通された前記円筒体または綱状物の外表面に当接させ、前記フレーム部材を前記円筒体または綱状物に支持させるステップと、
前記フレーム部材に前記円筒体または綱状物と周方向に対向して取り付けられた複数の撮影手段により、前記円筒体または綱状物の外表面を撮影するステップと、
前記走行支持手段により前記フレーム部材を前記円筒体または綱状物の長さ方向へ移動させるステップとを含む、点検方法。
【請求項12】
前記点検装置が備える距離計測手段により該点検装置が移動した距離を計測するステップをさらに含む、請求項11に記載の点検方法。
【請求項13】
前記フレーム部材を前記円筒体または綱状物の長さ方向の終端まで移動し、前記終端の位置で撮影が終了したかを判断することにより、前記円筒体または綱状物の最後まで撮影したかを判断するステップを含み、最後まで撮影していないと判断した場合に、前記移動させるステップと前記撮影するステップとを実行させる、請求項11または12に記載の点検方法。
【請求項1】
円筒体または綱状物の劣化状況を点検するための点検装置であって、
前記円筒体または綱状物が通される通路を有するフレーム部材と、
前記フレーム部材の長手方向の両端に形成され前記通路に連続する開口の中心に向けて突出するように設けられ、前記通路を通された前記円筒体または綱状物の外表面に当接して、前記フレーム部材を前記円筒体または綱状物に支持するとともに、前記フレーム部材を前記円筒体または綱状物の長さ方向へ移動させることが可能な走行支持手段と、
前記フレーム部材に、前記円筒体または綱状物と周方向に対向して取り付けられる複数の撮影手段とを含む、点検装置。
【請求項2】
前記フレーム部材は、前記円筒体または綱状物を中心として前記点検装置が回転しないように錘を備える、請求項1に記載の点検装置。
【請求項3】
前記点検装置が移動した距離を計測する距離計測手段をさらに備える、請求項1または2に記載の点検装置。
【請求項4】
前記複数の撮影手段は、前記周方向に一定間隔で離間して取り付けられ、前記円筒体または綱状物の表面からの距離が同じ距離とされる、請求項1〜3のいずれか1項に記載の点検装置。
【請求項5】
前記走行支持手段は、前記フレーム部材の前記開口が形成された各端部に設けられ、前記開口の中心に向けて突出する少なくとも3つのローラ支持部と、各前記ローラ支持部により回転可能に支持され、前記円筒体または綱状物の外表面と当接する少なくとも3つのローラと、少なくとも1つの前記ローラを回転させる動力手段とを含む、請求項1〜4のいずれか1項に記載の点検装置。
【請求項6】
前記フレーム部材は、複数の断面が矩形の角管と、前記角管と嵌合する嵌合部を備える複数のジョイントと、複数の矩形の透明板とを用いて形成される、請求項1〜5のいずれか1項に記載の点検装置。
【請求項7】
前記点検装置は、前記複数の撮影手段の各々に近隣して設けられ、前記撮影手段が撮影する範囲に光を照射するための複数の光源をさらに備える、請求項1〜6のいずれか1項に記載の点検装置。
【請求項8】
前記フレーム部材の両端に形成された前記開口を覆うためのカバーを備え、前記カバーは、前記円筒体または綱状物が挿通可能な穴を有し、前記穴の中心へ向けて突出するように設けられ、前記円筒体または綱状物の外表面を清掃するブラシを備える、請求項1〜7のいずれか1項に記載の点検装置。
【請求項9】
前記フレーム部材に連結されるワイヤをさらに備える、請求項1〜8のいずれか1項に記載の点検装置。
【請求項10】
無線通信により信号を受信し、前記信号に応答して、前記撮影手段により撮影された画像の画像データを送信し、または前記動力手段へ前記ローラを回転もしくは停止させる信号を出力する制御手段をさらに備える、請求項5に記載の点検装置。
【請求項11】
点検装置を用い、円筒体または綱状物の劣化状況を点検する点検方法であって、
前記点検装置の長手方向の両端に形成される開口と該開口に連続する通路を有するフレーム部材を、前記円筒体または綱状物が通路を通るように該円筒体または綱状物に取り付け、前記開口の中心に向けて前記フレーム部材から突出するように設けられる走行支持手段を、前記通路を通された前記円筒体または綱状物の外表面に当接させ、前記フレーム部材を前記円筒体または綱状物に支持させるステップと、
前記フレーム部材に前記円筒体または綱状物と周方向に対向して取り付けられた複数の撮影手段により、前記円筒体または綱状物の外表面を撮影するステップと、
前記走行支持手段により前記フレーム部材を前記円筒体または綱状物の長さ方向へ移動させるステップとを含む、点検方法。
【請求項12】
前記点検装置が備える距離計測手段により該点検装置が移動した距離を計測するステップをさらに含む、請求項11に記載の点検方法。
【請求項13】
前記フレーム部材を前記円筒体または綱状物の長さ方向の終端まで移動し、前記終端の位置で撮影が終了したかを判断することにより、前記円筒体または綱状物の最後まで撮影したかを判断するステップを含み、最後まで撮影していないと判断した場合に、前記移動させるステップと前記撮影するステップとを実行させる、請求項11または12に記載の点検方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2012−163402(P2012−163402A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−22759(P2011−22759)
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000195971)西松建設株式会社 (329)
【出願人】(504209655)国立大学法人佐賀大学 (176)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月4日(2011.2.4)
【出願人】(000195971)西松建設株式会社 (329)
【出願人】(504209655)国立大学法人佐賀大学 (176)
【Fターム(参考)】
[ Back to top ]