
無人搬送車による台車の自動搬送システム
【課題】簡易な機械式の構成で実施する、無人搬送車による台車の自動搬送システムを提供する。
【解決手段】無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2との組み合わせで構成され、無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始し、次順の台車2と連結した連結具7が連結解除ドグ9の位置へ到達した段階で前記連結を解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行する。
【解決手段】無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2との組み合わせで構成され、無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始し、次順の台車2と連結した連結具7が連結解除ドグ9の位置へ到達した段階で前記連結を解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、製品の組立工場などで好適に実施される台車の搬送システム、特に部品類や半製品等を積んだ専用の台車を、製品組立ラインの指定場所まで無人搬送車で自動的に搬送して、同指定場所では搬送してきた台車を自動的に解き放して一定位置へ置き、続いて部品類や半製品等を下ろして空になった台車を同じ無人搬送車で自動的に牽引して次の指定場所まで搬送し、同所でも牽引してきた空の台車を一定位置へ自動的に解き放して置き、続いて既に部品類や半製品等の積み込みを終えた台車を再び自動的に牽引して製品組立ラインの指定場所まで自動搬送する搬送システムであって、
特に言えば、無人搬送車に設備した、専用台車を牽引する牽引具と、前記牽引具で牽引される構成で台車に設備して、特定位置で牽引解除の機能を発揮する被牽引具と、及び特定の場所(指定場所)で複数の専用台車を順次一列に並べて置いた状態を保ちつつ一連に動かして台車列の前詰めを行い専用台車相互間を連結する連結具と被連結具、並びに無人搬送車が最先順位の専用台車を牽引すると次順位の専用台車(以下、単に台車と略す場合がある。)との前記連結具による連結を一定位置で解き放す連結解除具とにより、簡易な機械式(からくり方式)の構成で実施する、無人搬送車による台車の自動搬送システムの技術分野に属する。
【背景技術】
【0002】
無人搬送車による台車の自動搬送システムは、既に各種形式が開発され実用に供されている。
例えば下記の特許文献1には、路面に敷設した誘導路を検出しつつ同誘導路に沿って走行する自走機能を備え、台車の左右の車輪間の床下空間へ潜り込み、同台車を牽引させると共に、予定の位置で台車を放して置き、床下空間へ潜ったまま通り抜ける形態の無人搬送車が開示されている。
また、下記の特許文献2には、牽引車が台車の連結手段を備え、且つ走行方向前方の台車検出手段を備え、前記台車検出手段が前方に台車を検出すると駆動を停止させる走行用駆動手段を備え、走行継続中に前方台車検出手段が台車を検出すると、連結手段を変換駆動して、設定時間の経過後に連結手段を元の連結位置に復元させる構成の台車用けん引車、及び牽引システムが開示されている。但し、前記の各操作や制御には、電子制御システムが採用されており、コンピュータ制御に支配されている。
下記の特許文献3には、無人搬送車が台車の脚の間へ潜り込んで同台車を推進させるが、その軌道に沿って設置した切り離しレールへ無人搬送車が乗り上げると、台車との連結が解かれる構成が開示されている。
下記の特許文献4には、無人搬送車が1台の台車を牽引走行させて台車群の最後尾へ搬入して放し、続いて案内手段の位置を読み取り部で読み取ると、台車群の最前列位置の台車を搬出して牽引走行させる自動牽引システムが開示されている。この場合にも、案内手段の位置を読み取り部で読み取るために電子制御システムが採用されている。
下記の特許文献5には、無人搬送車が第1作業部の最前列位置の台車を誘導路に沿って運搬し、第2作業部を通って第1作業部の最後尾へ運んで、その台車群を1台分押させるシステムを制御盤で操作する搬送設備が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3482463号公報
【特許文献2】特許第3488765号公報
【特許文献3】特許第3758112号公報
【特許文献4】特許第4235891号公報
【特許文献5】特許第4756384号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された無人搬送車は、台車の床下空間へ潜り込んだ後、クランプを駆動して台車のフレームを掴み、牽引走行が可能な状態となり、終着位置では前記クランプを解いて台車を放す構成であり、電子制御システムを必須の構成要件としている。
上記特許文献2に開示された牽引車も、台車との連結手段(牽引ピン)を突出させる連結駆動手段の他、同連結手段を駆動制御する電子制御システムを必須の構成要件としている。
電子制御を採用する点では特許文献4、5も同様であり、台車の自動搬送システムの実施にはシステム全体の動きを考慮した制御ソフトが不可欠の構成となっている。そのため自動搬送システムの配置換え、又は各指定位置(ポジショニング)の変更には、当然、制御ソフトの改変を伴うから、一度設定すると安易に改変(設計変更)を行うことは難しい。つまり、搬送システムの配置変え、ないし各位置の変更は、ソフトウェアの専門設計者と協力して行うほかないから、容易なことではなく、もとより費用面の負担も大きいという問題点がある。
その点、上記特許文献3に開示された無人搬送システムは、無人搬送車が台車の脚の間へ潜り込んで台車を推進させ、その軌道に沿って設置した切り離しレールへ無人搬送車が乗り上げると、台車との連結が解かれる構成であるから、一応メカニカル方式(からくり方式)で実施される。
しかし、このからくり方式は、一体で動く台車列から最後尾の台車の連結を解く技術であるところ、本発明は逆に、台車列の最先順位の台車の連結を解いて前進を可能にする技術であるから、特許文献3に開示されたからくり方式との関連性、共通性はない。
【0005】
よって本発明の解決課題ないし目的は、もっと簡素な純機械的な構成で容易に実施できる機械式(からくり方式)の構成とし、組立ライン上の指定場所(製品組立位置)まで専用台車(以下、単に台車と略す。)を無人搬送車で搬送し、その指定場所では走行の過程で搬送してきた台車を解き放して置き、同台車に積んできた部品類や半製品の使用の便に供することができ、一方、前記部品類や半製品等を使用して、又は荷下ろしを行って空になった先順の台車は最先順位のものから順次に同じ無人搬送車の走行過程で牽引して次の指定場所(待機場所)まで運搬し、この待機場所ではやはり牽引してきた台車を解き放して部品類や半製品等の積み込みを行うことを可能にすると共に、同場所で既に荷積みを終えた先順の台車は最先順位のものから順次に牽引して、再び組立ラインの次の指定場所まで無人搬送車で搬送する、いわば循環型の無人搬送システムを提供することである。
特に、無人搬送車に設備した、専用台車を牽引するための牽引具と、前記牽引具により無人搬送車の走行過程で自動的に牽引されるように台車に設備され、しかも無人搬送車の走行過程で牽引解除も自動的に行える被牽引具と、及び特定の場所で一列をなして待機する一群の台車の相互間を連結して待機状態を一体化させる連結具と被連結具の対、並びに前記一群の台車列から最先順位の専用台車を無人搬送車が引き出すと、一群の台車列は一体的に一定位置まで前進して前詰めが行われた上で、前記最先順位の専用台車と次順位の専用台車との連結を特定位置で解き放す連結解除具とにより構成した、簡易で純機械的なからくり方式を実施でき、システム全体の電子制御は行わないで、電子制御は一切用いず、システムの配置換えや変更等を至極簡単に行えて使い勝手の良い、無人搬送車による台車の自動搬送システムを提供することである。
更には台車群の前詰め(台車列を一体的に一定位置まで前進させる)操作に他の動力源を一切必要とせず、専用台車を牽引する無人搬送車の走行を利用して行うことができ、その分の構成を簡素化した自動搬送システムを提供することである。
【課題を解決するための手段】
【0006】
上記した従来技術の課題を解決する手段として、請求項1に記載した発明に係る無人搬送車による台車の自動搬送システムは、
無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2(以下、単に台車と略す。)との組み合わせで構成され、
無人搬送車1は、路面3に敷設した誘導路を検出しつつ同誘導路に沿って走行する自走機能を備え、前記台車2の車幅方向の車輪20、20間の床下空間を潜って走行し通過可能な形態に構成され、上面部に台車2を牽引する牽引ピン4を上向きに備えており、
台車2には、車幅方向の車輪20、20間の床下面に、前記無人搬送車1の牽引ピン4が通過する移動経路に沿って平行な配置に、同牽引ピン4が突き当たって走行推進力を付与される牽引用フラップ53を備えた被牽引具5が設置されており、この被牽引具5に、当該台車2が先順の台車へ突き当たり一定ストローク押し込まれると前記牽引用フラップ53を駆動して牽引ピン4の突き当たり状態を解除する牽引解除用枠55が、被牽引具5の先端から一定寸法突き出され、且つ台車2の前端よりも突き出された位置を常態として後方へスライド可能に設置され、同牽引解除用枠55を前記常態位置へ復元させる手段56を備えており、
台車2は更に、その走行方向の前側又は後側に、走行方向の前後に隣接する台車2、2同士を連結する連結具7と、同連結具7が掛け止まる被連結部8とが相対応する配置に設けられ、前記連結具7はこれを被連結具から外す作用を受ける連結解除作用部71を備えており、
前記無人搬送車1で牽引走行される前記台車2の前記連結解除作用部の移動経路上の路面3には、前記連結具7と被連結部8との連結を解除させるべき位置に、前記連結解除作用部を介して連結具7を被連結部8から外す連結解除ドグ9が設置されており、
無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始し、次順の台車2と連結した連結具の連結解除作用部が連結解除ドグ9の位置へ到達し解除作用を受けた段階で前記連結を解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行することを特徴とする。
【0007】
請求項2に記載した発明は、請求項1に記載した発明に係る無人搬送車による台車の自動搬送システムにおいて、
無人搬送車1の牽引ピン4は、走行方向の前後位置に間隔を開けて2本上向きに設けられており、
台車2の被牽引具5は、前記牽引ピン4の通過を許容する下向きの溝型部材50の溝内に、前記2本の牽引ピン4、4の前後方向の間隔と同等の間隔を開けた2位置のうち走行方向前側位置には牽引用フラップ53が、後側の位置には飛び出し阻止フラップ51が、それぞれ上下方向への回動が自在に、且つ牽引ピン4の前進方向へ前下がり傾斜の姿勢で設置されており、
また、溝型部材50の溝内の走行方向の前端を含む部位に、牽引解除用枠55が前後方向へ一定のストロークをスライド自在に設置され、同牽引解除用枠55の後端部55aは後退方向への移動で前記牽引用フラップ53を上方へ前記牽引ピン4が通過し得る高さまですくい上げる傾斜面に形成されており、この牽引解除用枠55の前端55bを常時一定長さだけ溝型部材50の前端よりも突き出させ、押し込まれると前記位置へ復元させる弾性体56が牽引解除用枠55と溝型部材50との間に設置されており、
無人搬送車1が1台の台車2を牽引走行して指定場所へ到達し、そこに待機する台車列における最後尾の台車2へ、牽引台車2の被牽引具5の牽引解除用枠55が突き当たり、一定寸法L押し込まれた牽引解除用枠55の後端部55aが牽引用フラップ53をすくい上げて牽引ピン4の突き当たり状態を解除すると、無人搬送車1は当該台車2を置き放し、台車列の床下空間を潜って前進し最先順位の台車へ到達することを特徴とする。
【0008】
請求項3に記載した発明は、請求項1又は2に記載した発明に係る無人搬送車による台車の自動搬送システムにおいて、
無人搬送車1が1台の台車2を牽引走行して指定場所へ到達し、待機中の台車列における最後尾の台車2へ牽引台車2が突き当たると、最後尾の台車2の後側、又は牽引してきた台車2の前側に設けられた連結具7が、突き当たった相手の台車2の被連結部8へ結合して前後に隣接する台車相互間の連結が行われ、指定場所に待機する複数の台車同士は順次に一列の数珠繋ぎ状態に連結されることを特徴とする。
【発明の効果】
【0009】
本発明の無人搬送車による台車2の自動搬送システムは、無人搬送車1が備えた牽引ピン4と、専用台車2(以下、台車と略す。)の被牽引具5と、前後に隣接する台車2、2同士を連結する連結具7と、同連結具7が連結する被連結部8、及び連結具7を被連結部8から外す連結解除ドグ9とを主要素とする機械的なからくり方式で実施され、前記牽引ピン4は上下動させる必要がない構成なので、電子制御による駆動・制御を一切含まず、そのためシステム全体の動きを制御する制御ソフトの設計やプログラムの必要のない運転ができ実施が容易である。
更に、別個の駆動源を用いることなく、台車群の前詰め(一群の台車列を一体的に前方の一定位置へ移動させること)を、台車2を牽引する無人搬送車1により行うので、別途前詰め操作を行う必要がなく、この意味でも搬送システムの簡素化を実現できる。
即ち、本発明の無人搬送車による台車の自動搬送システムは、実施に際して無人搬送車1の用意とその誘導路の敷設、及び台車2を必要台数用意し、台車2の待機場所(荷積み又は荷下ろし等の場所)を指定する連結解除ドグ9の位置を決めて設置することにより、至極簡単に実施できる。
しかもシステムの運転内容の改変も、誘導路の敷設のやり直し、及び連結解除ドグ9の設置位置を変更するだけで簡単、容易に行えるから、システムの費用対効果を大きく高めることができる。勿論、電気の使用量も少ないので省エネルギ効果も高く、メンテナンスも容易である。
【図面の簡単な説明】
【0010】
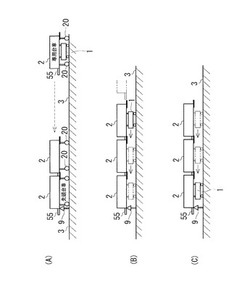
【図1】A〜Cは本発明による自動搬送システムにおいて、無人搬送車が、搬送してきた台車を最後尾へ置き放して前進する動作の概要を示した説明図である。
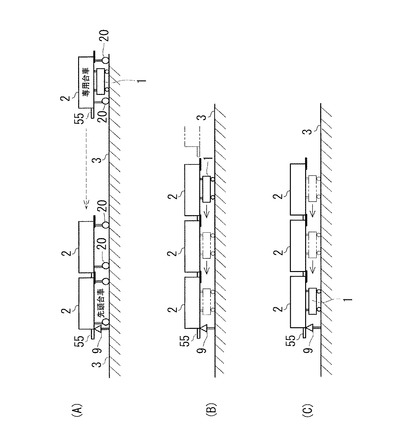
【図2】A、Bは本発明による自動搬送システムにおいて、無人搬送車が、台車列の床下空間を潜って前進し、最先順位の台車を牽引し走行を開始する動作の概要を示した説明図である。
【図3】A、Bは本発明の自動搬送システムに用いる無人搬送車の一例を示した平面図と立面図である。
【図4】A、Bは本発明の自動搬送システムに用いる専用台車の一例を示した側面図と正面図である。
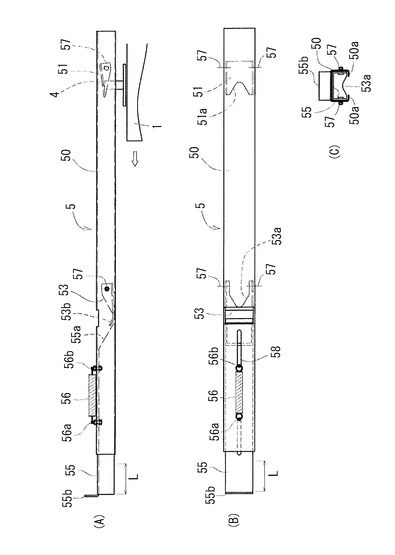
【図5】本発明による自動搬送システムの実施において、台車列と無人搬送車の関連する構成例を示した側面図である。
【図6】A〜Cは本発明による自動搬送システムの実施において、無人搬送車の牽引ピンが台車の被牽引具へ進入する当初段階の構成を示した説明図である。
【図7】A、Bは本発明による自動搬送システムの実施において、無人搬送車の牽引ピンが台車の被牽引具へ進入して牽引可能状態となった段階、及び同牽引ピンが被牽引具から牽引解除にされた段階の構成を示した説明図である。
【発明を実施するための形態】
【0011】
本発明の無人搬送車による台車の自動搬送システムは、無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2(以下、単に台車と略す。)との組み合わせで構成する。
無人搬送車1は、路面3に敷設した誘導路を検出しつつ同誘導路に沿って走行する自走機能を備え、前記台車2の車幅方向の車輪20、20間の床下空間を潜って走行し通過可能な形態に構成され、上面部に、台車2を牽引する前後2本の牽引ピン4、4を垂直上向きに備えている。この牽引ピン4、4は上下動させない構成である。
台車2には、車幅方向の車輪20、20間の床下面に、前記無人搬送車1の牽引ピン4が通過する移動経路に沿って平行な配置に、同牽引ピン4が突き当たって走行推進力を付与される牽引用フラップ53を備えた被牽引具5が設置されている。この被牽引具5に、当該台車2が先順の台車へ突き当たり一定ストロークL押し込まれると、前記牽引用フラップ53を駆動して牽引ピン4の突き当たり状態を解除する牽引解除用枠55が、被牽引具5の先端から一定寸法L突き出され、且つ台車2の前端よりも突き出た位置を常態として後方へスライド可能に設置され、同牽引解除用枠55を後方から前記常態位置へ復元させる手段56を備えている。
台車2には更に、走行方向の前後に隣接する台車2、2同士を連結する連結具7と、同連結具7が掛け止まる被連結部8とが相対応する配置に設けられ、連結具7はこれを被連結具8から外す作用を受ける連結解除作用部71を備えている。
前記無人搬送車1で牽引走行される前記台車2の移動経路上の路面3には、前記連結具7と被連結部8との連結を解除させるべき位置に、連結具7を被連結部8から外す連結解除ドグ9が設置されている。
無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始する。
そして、次順の台車2と連結した連結具7が連結解除ドグ9の位置へ到達する位置まで前詰めが行われ、連結解除ドグ9の位置で連結具7による前記連結が解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行する動作を繰り返す。
【0012】
上記無人搬送車1の牽引ピン4は、走行方向の前後位置に間隔を開けて2本垂直上向きに設けられる。
台車2の被牽引具5は、前記牽引ピン4の通過を許容する下向きの溝型部材50の溝内に、前記2本の牽引ピン4、4の前後方向の間隔と同じか、それよりも若干大きい間隔を開けた2位置のうち、前側位置に牽引用フラップ53が、後側の位置には飛び出し阻止フラップ51が、それぞれ上下方向への回動が自在に、且つ牽引ピン4の前進方向へ前下がり傾斜の姿勢に設置されている。
また、溝型部材50の溝内の走行方向の前端を含む部位に、牽引解除用枠55が前後方向へ一定のストロークをスライド自在に設置され、同牽引解除用枠55の後端部55aは後退方向への移動で前記連結解除用フラップ53を上方へ前記牽引ピン4が通過し得る高さまですくい上げる傾斜面に形成されている。この牽引解除用枠55の前端を常時一定の長さLだけ溝型部材50の前端よりも突き出させ、押し込まれると前記位置へ復元させる手段である弾性体56が牽引解除用枠55と溝型部材50との間に設置されている。
無人搬送車1が1台の台車2を牽引走行して指定場所へ到達し、そこに待機する台車列における最後尾の台車2へ牽引台車2の被牽引具5の牽引解除用枠55が突き当たり、一定寸法Lを押し込まれた牽引解除用枠55の後端部55aが牽引用フラップ53をすくい上げて牽引ピン4の突き当たり状態を解除した段階で、無人搬送車1は当該台車2を置き放し、そのまま台車列の床下空間を潜って前進し通過する。
なお、無人搬送車1が1台の台車2を牽引走行して指定場所へ到達し、待機中の台車列における最後尾の台車2へ突き当たる前後に、最後尾の台車2の後側、又は牽引してきた台車2の前側に設けられた連結具7が、突き当たった相手の台車2における被連結部8と結合して隣接する台車相互間の連結が行われる。かくして指定場所に待機する複数の(一群の)台車2、2同士は順次に一列の数珠繋ぎ状態の連結とされる。
【実施例1】
【0013】
以下に、本発明を図示した実施例に基づいて説明する。
本発明の無人搬送車による台車の自動搬送システムは、図1と図2に分けてシステム概要を示した通り、無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2(以下、単に台車と略す。)との組み合わせで構成し実施される。
無人搬送車1は、路面3へ敷設した例えば磁気テープ等により形成した誘導路をセンサーで検出しつつ同誘導路に沿って走行する自走機能を備え、前記台車2の車幅方向(図4Bの左右方向)の車輪20、20間の床下空間を潜って走行方向へ通過可能な形態に構成されている。
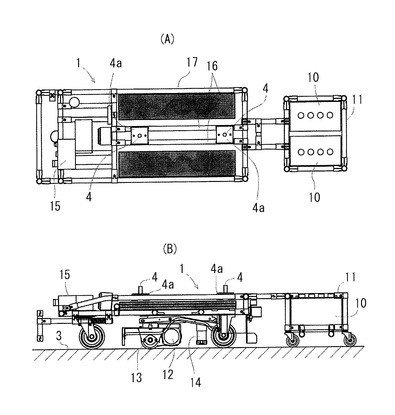
この無人搬送車1の構成に関しては、例えば上記特許技術文献1記載の誘導式牽引車の構成との共通点が多いので参照できるが、更に具体的に、図3A、Bに例示した無人搬送車1について説明する。図示例は電源用バッテリー10を搭載したバッテリー台車11を牽引する構成であり、前記バッテリー10を電源とする駆動モータ12で駆動輪13を回転駆動して走行する。誘導路を検出する磁気読み取り部14の検出値を制御部15にて演算処理した結果に基づき操舵機構を自動制御して誘導路に沿い走行する自走機能を備えている。
上記駆動モータ12と駆動輪13を主要部とする駆動ユニットを組み付けたメインフレーム(車台)17の上面部中央の走行方向に、2本の平行な棒材による取り付け枠16を設け、該取り付け枠16の前後に一定の間隔を開けた2位置に、台車2を牽引する2本の牽引ピン4、4が、その台板4aを取り付け固定して垂直上向きに設置されている。2本の牽引ピン4、4は垂直上向きにしっかり固定して立てた常態であり、上下動はさせない構成である。因みに前記2本の牽引ピン4、4の設置間隔は500mm程度である。
【0014】
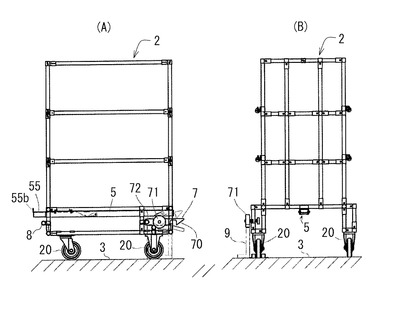
一方、台車2は、図4A、Bに示したとおり、車幅方向(図4Bの左右方向)の車輪20、20間の床下面に、前記無人搬送車1の牽引ピン4が通過する移動経路に沿って平行な配置で、同牽引ピン4が通過途中で突き当たり走行推進力を付与される牽引用フラップ53を備えた被牽引具5が走行方向の向きに水平に設置されている。
この被牽引具5の構成、作用の詳細は、図6と図7に分けて概念図を例示したとおりである。
被牽引具5は、図6Cに示したとおり、下向きの溝型部材50が主体をなす。この溝型部材50が、図4A、Bに示したように、台車2の車幅方向の車輪20、20間の床下面において、上記牽引ピン4が通過する移動経路に沿って平行な配置に、溝型を下向きに取り付けて固定されている。
上記下向きの溝型部材50の溝内における前後方向の2位置であって、上記2本の牽引ピン4、4の前後方向の間隔に対して、好ましくは前後2本の牽引ピン4、4がきっちり納まる(嵌る)ように略同じ間隔を開けた2箇所の位置に、若しくは前記2本の牽引ピン4、4の前後方向の間隔よりも若干大きい間隔(例えば510mm程度の間隔)を開けた2箇所の位置であって溝型部材50の中間点よりも走行方向へ少し前寄りの位置に牽引用フラップ53を設置し、そして、後方側の位置には飛び出し阻止フラップ51が、それぞれ走行方向の後端側部位を溝型部材50へピン57により上下方向への回動が自在に、且つ牽引ピン4の前進方向へ前下がりの傾斜姿勢に設置されている。
【0015】
因みに、上記飛び出し阻止フラップ51と、牽引用フラップ53の機能及び動作の差異は次に説明するとおりである。
図6Aに示したように、無人搬送車1及びその牽引ピン4は、図6Aの右側から左方へ進む。これに対して、被牽引具5の飛び出し阻止フラップ51は、図6Bで明解なとおり、牽引ピン4を受け止めるU字形状部51aを、飛び出し阻止フラップ51の前縁から右方へ切り込んで、左方に開口する形状に形成している。そして、同飛び出し阻止フラップ51の後方上部の位置がピン57で上下方向へブランコ状の回動が自在に溝型部材50へ取り付けられている。
したがって、無人搬送車1の牽引ピン4が図6Aのように右側から左方へ進んできた場合、飛び出し阻止フラップ51は、ブランコの如く牽引ピン4により押し上げられて上方へ逃げ、牽引ピン4の前進、通過を許容する。
しかし、牽引ピン4が一旦飛び出し阻止フラップ51を押し上げて通過した場合は、直ちに重力モーメントの作用で下方の元位置へ下降して復帰する。よって、その後は牽引ピン4が逆に右方へ後退しようとしても、牽引ピン4は飛び出し阻止フラップ51のU字形状部51aへ進入して突き当たり、後退動作は確実に阻止される。
【0016】
一方、牽引用フラップ53は逆に、図6Bで明解なとおり、牽引ピン4を受け止めるU字形状部53aは、牽引用フラップ53の後縁から前方(左方)へ切り込まれて後縁に開口している。つまり、飛び出し阻止フラップ51とは正反対の形状に形成されている。そして、同牽引用フラップ53の後方上部の位置がピン57で上下方向へブランコ状の回動が自在に溝型部材50へ取り付けられている。
したがって、無人搬送車1の牽引ピン4が図7Aに示すように左方へ進んできた場合、同牽引ピン4は、待ちかまえた牽引用フラップ53のU字形状部53aへ進入して突き当たる。そのため無人搬送車1は、牽引ピン4が牽引用フラップ53のU字形状部53aへ進入して突き当たった段階で、同牽引用フラップ53および被牽引具5を仲介として台車2を一体的に牽引し走行させることになる。
【0017】
ここで無人搬送車1には走行方向の前後の2位置に2本の牽引ピン4、4を立てた理由及び役割を説明する。無人搬送車1は、台車2を一体的に牽引して路面3へ敷設した誘導路に沿って走行するが、概して誘導路は曲がりくねっており、多くのカーブで成り立っている。前記カーブでは誘導路に沿って走行する無人搬送車1に対して、牽引される台車2は、牽引ピン4が1本であると、台車2が牽引ピン4を中心に水平方向への回転を生じてフラフラし、きっちりとした追随走行ができないという問題が起こる。牽引ピン4の平面形状を四角形にした嵌め合い構造にすると、前記回転をある程度は防げる。しかし、そうすると牽引ピン4と牽引用フラップ53との嵌め合いの位置関係が厳しくなるなど、牽引位置精度の技術的障害が起きてくる。したがって、牽引ピン4の平面形状は円形とするのが最適の実施形態である。しかも牽引ピン4の太さ(強度)の検討を加味すれば、台車2の走行方向の前後2箇所の位置を2本の円形断面の牽引ピン4、4で牽引を行うことが、台車2を無人搬送車1と一体的に追随走行させる上で最も合理的な構成と考えられるのである。
【0018】
次に、台車2を牽引する無人搬送車1が減速や停止する動作の状況を考えると、牽引される台車2にブレーキは働かないので、台車2は、無人搬送車1が減速や停止する度に走行の慣性力が働いて前方へそのまま進もうとする。しかし、無人搬送車1は減速や停止する関係上、1本の牽引ピン4と牽引用フラップ53との関係のみでは、見掛け上、台車2と共に牽引用フラップ53が前方へ進むのに対して、牽引ピン4は後方へ遅れることになり、当初の牽引関係は解除される。場合によっては台車2のみが前方へ進む一人歩きの状況になり不都合である。
よって、上記の不都合を未然に防止して台車2を無人搬送車1と一体的に減速や停止させる動作を実現するためには、前側位置の牽引ピン4が台車2の牽引用フラップ53のU字形状部53aへ突き当たった時点で、後側位置の牽引ピン4も後方の飛び出し阻止フラップ51のU字形状部51a内へきっちり嵌る構成とすることが肝要である。以上の検討によれば、台車2の被牽引具5に設ける前後の牽引用フラップ53と飛び出し阻止フラップ51それぞれのU字形状部53aと51a有効間隔は、無人搬送車1の前後2本の牽引ピン4、4の実効間隔と同じか、実際の動作の円滑性を考慮すると若干大きい程度が好ましいのである。
【0019】
次に、牽引ピン4が被牽引具5の牽引用フラップ53との牽引状態を解除される手段について説明する。
被牽引具5を構成する溝型部材50の溝内であって、その前端を含む走行方向の前側部分に、牽引解除用枠55が、溝型部材50の両側の側壁下部を内側へ折り返したリップ50aを利用して前後方向へ一定のストロークをスライド自在に設置されている。そして、前記牽引解除用枠55は、図4Aに示したとおり、台車1の前端よりも突き出る構成とされている。
牽引解除用枠55は溝型部材50よりも少し小さく相似な溝型材で構成され、その前端に、ウエブ部分を上向きへ直角に折り曲げた突き当たり片55bが形成されている。この牽引解除用枠55の後端部55aは、図6A及び図7Aが見やすいとおり、後退方向へ一定ストローク移動すると、上記牽引用フラップ53の前縁からその下面側へ潜り込み、同牽引用フラップ53を上方へすくい上げて(ピン57を中心に上方へ回動させて)上記牽引ピン4が通過し得る高さまで押し上げる(図7Bを参照)傾斜角及び背の高さに形成されている。一方、牽引用フラップ53の前縁には、前記作用及び動作を考慮して、前記すくい上げ動作を良好に行わせる構成として、牽引解除用枠55の後端部(傾斜面)55aの潜り込み(すくい上げ)を円滑に行わせるすくい片53bが、若干の上向き角度に形成されている。
【0020】
次に、上記の牽引解除用枠55は、上述したように前後方向へ一定のストロークをスライド自在に設置されているが、その目的は牽引ピン4の上記牽引解除動作を実現するに足るストロークのスライドを行う構成とされている。しかも牽引解除用枠55は、前端が図6A、Bのとおり常時は前記必要ストロークのスライドを生じさせるに足る長さLだけ溝型部材50の前端よりも突き出した長さで設置され、且つ台車2の前端よりも前方へ突き出す構成とされている。そして、常時は牽引解除用枠55の前端が長さLだけ溝型部材50の前端よりも突き出た状態を定位置とし、押し込まれた際には元位置へ速やかに復元させる手段として、弾性体56(図示例では引張り用のコイルバネ、ただしコイルバネに限らない。)が、牽引解除用枠55と溝型部材50との間に設置されている。
図示例の場合、弾性体56の一端は溝型部材50へ固定したバネ受け56aに止められている。これに対して、弾性体56の他端を牽引解除用枠55へ止めたバネ受け56bの位置は、溝型部材50のウエブ中央の長手方向に前記バネ受け56bを移動させる逃げ溝58内に位置され、牽引解除用枠55と共に移動可能とされている。逃げ溝58は、少なくとも前記ストロークLのスライドを許容する長さに形成されている。
つまり、牽引解除用枠55は、弾性体56により常時図6及び図7の左方向に引っ張られており、前記バネ受け56bが逃げ溝58の左端へ当たった位置に止まっている。
【0021】
上記の構成を前提として、図1Aのように無人搬送車1が1台の台車2を牽引・走行して指定場所へ到達し、そこに待機する一群の台車列における最後尾の台車2へ、牽引してきた台車2が突き当たった図1Bの段階から自動搬送システムの動作説明を始める。
牽引してきた台車2が最後尾の台車2へ突き当たると、牽引台車2の被牽引具5の牽引解除用枠55が、図7Bのように押し込まれる。すると同牽引解除用枠55の後端55aである傾斜面によって牽引用フラップ53がすくい上げられ、牽引ピン4の高さを超えた段階で牽引ピン4の牽引状態が解除される。
そのため無人搬送車1は、牽引してきた台車2を置き放して、図1B、C及び図2Aに示したように、台車列の床下空間を潜って進み、最先順位の台車2の位置に至る。
【0022】
因みに、牽引台車2が台車列の最後尾の台車2へ突き当たった状態、および一群の台車列は以下に説明するように、台車相互間を連結具7によって連結され、同連結具7が連結解除ドグ9で連結を解除されるまでは連結状態を維持するので、無人搬送車1の2本の牽引ピン4、4は何ら支障なく、台車列の床下空間を潜って進み、最先順位の台車2の位置に到達できる。
即ち、無人搬送車1が台車2を牽引・走行して、指定場所で待機中の台車列における最後尾の台車2へ突き当たるのと相前後して、図4Aと図5に示すように、最後尾の台車2の後面(又は逆に牽引してきた台車2の前面でも可、以下同じ。)から後向きに連結具7が突き出されており、同連結具7のフック部70が、突き当たってきた牽引台車2の前部(又は逆に牽引してきた台車2の後部でも可、以下同じ。)に設けられた被連結部8へ噛み付き結合して、前後に隣接する台車2、2相互間の連結が達成される。
このようにして指定場所に到達した台車は、次々と相互に隣接するもの同士が数珠繋ぎ状態に連結されて一列を成し、一定の場所に止まり待機することになる。
【0023】
前後に隣接する台車2、2同士を上記数珠繋ぎ状態に連結するための構成として、本実施例の連結具7は、図4Aが分かり易いように、走行方向の後ろ向きに先細形状に突き出し、且つ下向きに突き出た顎を有する銛形状のフック部70を備えた構成とされ、その他端がピン72により台車2のフレームへ上下方向の回動が自在に取り付けられている。また、連結具7の長さ方向の中間部位に、連結解除の作用を受ける手段として連結解除作用部71として図示例では回転自在なカムローラが設けられている。
他方、路面3には、無人搬送車1で牽引・走行する台車2の連結具7の特には連結解除作用部71の移動経路上の特定位置、具体的には上記連結具7と被連結部8との連結を解除するべき位置、即ち、指定場所の出口相当の位置に、上記連結解除作用部71を介して連結具7を押し上げて被連結部8との連結を外す連結解除ドグ9が設置されている。
この連結解除ドグ9は、図示の便宜上、図1及び図2には上向きの矢印形状で表記したが、より具体的に構成を説明すると、連結具7の連結解除作用部71であるカムローラが接触して乗り上げる直動カムと同様な作用効果を働く傾斜面(カム斜面)を備えている。そして、この連結解除ドグ9は、上記誘導路に沿った領域であって台車2へ部品や半製品を荷積みする場所(指定場所)、或いは前記部品や半製品を使用に供するため一時的に台車2を留め置くべき「指定場所」の先頭位置(出口位置)の路面上に、位置を固定して設置されている。連結解除ドグ9の前記傾斜面(カム斜面)は、連結具7の連結解除作用部であるカムローラ71を押し上げて連結具7のフック70を被連結部8から抜き外す作用に十分足りるリフト量を備えた構成とされている。
もっとも、連結具7と連結解除作用部(カムローラ)71、及び連結解除ドグ9の形状及び作用等は、上記構成の限りではない。無人搬送車1が1台の台車2を牽引・走行して指定場所へ到達し、待機中の台車列における最後尾の台車2へ突き当たるのと相前後して台車相互間の連結が達成され、そして、前記の連結は指定場所を出る一定の位置で解除できる機械式の構成であれば良く、上記構成には限らない。
【0024】
上記のようにして、指定場所へ到達し待機中の台車列が隣接する台車同士を相互に数珠繋ぎ状態に連結して一列を成す結果、各台車2それぞれの被牽引具5における牽引解除用枠55が、図7Bのように押し込まれたままの状態を維持することを意味する。よって、同被牽引具5の牽引用フラップ53は押し上げられ状態のままとなり、無人搬送車1の牽引ピン4が通過することに何ら支障ない状態に保たれることを意味する。
したがってまた、上記した無人搬送車1は、牽引してきた台車2を台車列の最後尾へ置き放したまま、図1B〜C及び図2Aに示したように、台車列の床下空間を潜って前進し最先順位の台車2の位置まで支障なく到達できることをも意味する。
かくして無人搬送車1が、指定場所で待機する一群の台車列の最先位置の台車2へ到達すると、同台車2の被牽引具5の牽引解除用枠55は何物にも邪魔されない自由な状態であるが故に、弾性体56によって突き出されている。そのため牽引用フラップ53は図6A、B及び図7Aに示したとおり、前進する牽引ピン4が突き当たる位置に復元しているので、当然、当該最先位置の台車2を牽引ピン4が牽引し走行させることになる。
こうして無人搬送車1が最先位置の台車2を牽引し走行させると、一時的には図1Cに示しているように、一群の台車列の全体を一体的に牽引する常態になる。しかし、最先位置の台車2と次順の台車2を連結した連結具7が、指定場所の出口位置に設けた連結解除ドグ9へ接触する位置まで進んだ段階(図2A)で、連結解除ドグ9の上記傾斜面(カム斜面)へ連結解除作用部であるカムローラ71が接触し押し上げられる結果、連結部7のフック70が被連結部8から浮上して抜き外される。
従って、無人搬送車1は、次順の台車2と切り離された最先位置の台車2を牽引走行することになる(図2B)。
そしてまた、一群の台車列の全体が一体的に、図1C及び図2Bに示すように連結解除ドグ9の近傍位置まで、前詰めされて待機することにもなる。
【0025】
以上に説明したとおり、本発明の自動搬送システムは、無人搬送車1が誘導路上の指定場所で相互に連結され数珠繋ぎ状態で待機する台車列の床下空間を潜って前進し、最先順位の台車2まで進むと、同最先順位の台車2の被牽引具5へ牽引ピン4が突き当たった状態で同台車2の牽引を開始する。よって一時的には一群の台車列は全体が一体的に前詰めされることになる。そして、次順の台車2と連結した連結具7の連結解除作用部であるカムローラ71が連結解除ドグ9の位置へ到達し接触することで前記連結を解除される。
よって、無人搬送車1はそのまま最先順位の1台の台車2を牽引して次の指定場所まで進む。そして、次の指定場所へ到達した台車2の被牽引具5が、待機中の台車列の最後尾の台車2へ突き当たり、牽引解除用枠55が一定量Lだけ押し込まれると、牽引用フラップ53が牽引ピン4の突き当たり状態を解除するので、牽引してきた台車2を置き放し、無人搬送車1のみが台車列の床下空間を潜って前進する。
そして、無人搬送車1が最先順位の台車2まで進み、被牽引具5の牽引用フラップ53へ牽引ピン4が突き当たると、同台車2を牽引走行する動作が再び繰り返される。
【0026】
以上に本発明を図示した実施例に基づいて説明したが、勿論、本発明は上記実施例の構成に限定されるものではない。本発明の要旨、及び技術思想を逸脱しない範囲で、当業者が必要に応じて行う設計変更や応用、変形として種々な態様で実施され得ることを、念のため申し添える。
【符号の説明】
【0027】
1 無人搬送車
2 台車
20 台車の車輪
3 路面(誘導路を含む)
4 牽引ピン
5 被牽引具
53 牽引用フラップ
55 牽引解除用枠
55a 牽引解除用枠の後端部
55b 牽引解除用枠の前端
56 復元手段(弾性体)
7 連結具
71 連結解除作用部(カムローラ)
8 被連結具
9 連結解除ドグ
50 溝型部材
51 飛び出し阻止フラップ
【技術分野】
【0001】
この発明は、製品の組立工場などで好適に実施される台車の搬送システム、特に部品類や半製品等を積んだ専用の台車を、製品組立ラインの指定場所まで無人搬送車で自動的に搬送して、同指定場所では搬送してきた台車を自動的に解き放して一定位置へ置き、続いて部品類や半製品等を下ろして空になった台車を同じ無人搬送車で自動的に牽引して次の指定場所まで搬送し、同所でも牽引してきた空の台車を一定位置へ自動的に解き放して置き、続いて既に部品類や半製品等の積み込みを終えた台車を再び自動的に牽引して製品組立ラインの指定場所まで自動搬送する搬送システムであって、
特に言えば、無人搬送車に設備した、専用台車を牽引する牽引具と、前記牽引具で牽引される構成で台車に設備して、特定位置で牽引解除の機能を発揮する被牽引具と、及び特定の場所(指定場所)で複数の専用台車を順次一列に並べて置いた状態を保ちつつ一連に動かして台車列の前詰めを行い専用台車相互間を連結する連結具と被連結具、並びに無人搬送車が最先順位の専用台車を牽引すると次順位の専用台車(以下、単に台車と略す場合がある。)との前記連結具による連結を一定位置で解き放す連結解除具とにより、簡易な機械式(からくり方式)の構成で実施する、無人搬送車による台車の自動搬送システムの技術分野に属する。
【背景技術】
【0002】
無人搬送車による台車の自動搬送システムは、既に各種形式が開発され実用に供されている。
例えば下記の特許文献1には、路面に敷設した誘導路を検出しつつ同誘導路に沿って走行する自走機能を備え、台車の左右の車輪間の床下空間へ潜り込み、同台車を牽引させると共に、予定の位置で台車を放して置き、床下空間へ潜ったまま通り抜ける形態の無人搬送車が開示されている。
また、下記の特許文献2には、牽引車が台車の連結手段を備え、且つ走行方向前方の台車検出手段を備え、前記台車検出手段が前方に台車を検出すると駆動を停止させる走行用駆動手段を備え、走行継続中に前方台車検出手段が台車を検出すると、連結手段を変換駆動して、設定時間の経過後に連結手段を元の連結位置に復元させる構成の台車用けん引車、及び牽引システムが開示されている。但し、前記の各操作や制御には、電子制御システムが採用されており、コンピュータ制御に支配されている。
下記の特許文献3には、無人搬送車が台車の脚の間へ潜り込んで同台車を推進させるが、その軌道に沿って設置した切り離しレールへ無人搬送車が乗り上げると、台車との連結が解かれる構成が開示されている。
下記の特許文献4には、無人搬送車が1台の台車を牽引走行させて台車群の最後尾へ搬入して放し、続いて案内手段の位置を読み取り部で読み取ると、台車群の最前列位置の台車を搬出して牽引走行させる自動牽引システムが開示されている。この場合にも、案内手段の位置を読み取り部で読み取るために電子制御システムが採用されている。
下記の特許文献5には、無人搬送車が第1作業部の最前列位置の台車を誘導路に沿って運搬し、第2作業部を通って第1作業部の最後尾へ運んで、その台車群を1台分押させるシステムを制御盤で操作する搬送設備が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第3482463号公報
【特許文献2】特許第3488765号公報
【特許文献3】特許第3758112号公報
【特許文献4】特許第4235891号公報
【特許文献5】特許第4756384号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記特許文献1に開示された無人搬送車は、台車の床下空間へ潜り込んだ後、クランプを駆動して台車のフレームを掴み、牽引走行が可能な状態となり、終着位置では前記クランプを解いて台車を放す構成であり、電子制御システムを必須の構成要件としている。
上記特許文献2に開示された牽引車も、台車との連結手段(牽引ピン)を突出させる連結駆動手段の他、同連結手段を駆動制御する電子制御システムを必須の構成要件としている。
電子制御を採用する点では特許文献4、5も同様であり、台車の自動搬送システムの実施にはシステム全体の動きを考慮した制御ソフトが不可欠の構成となっている。そのため自動搬送システムの配置換え、又は各指定位置(ポジショニング)の変更には、当然、制御ソフトの改変を伴うから、一度設定すると安易に改変(設計変更)を行うことは難しい。つまり、搬送システムの配置変え、ないし各位置の変更は、ソフトウェアの専門設計者と協力して行うほかないから、容易なことではなく、もとより費用面の負担も大きいという問題点がある。
その点、上記特許文献3に開示された無人搬送システムは、無人搬送車が台車の脚の間へ潜り込んで台車を推進させ、その軌道に沿って設置した切り離しレールへ無人搬送車が乗り上げると、台車との連結が解かれる構成であるから、一応メカニカル方式(からくり方式)で実施される。
しかし、このからくり方式は、一体で動く台車列から最後尾の台車の連結を解く技術であるところ、本発明は逆に、台車列の最先順位の台車の連結を解いて前進を可能にする技術であるから、特許文献3に開示されたからくり方式との関連性、共通性はない。
【0005】
よって本発明の解決課題ないし目的は、もっと簡素な純機械的な構成で容易に実施できる機械式(からくり方式)の構成とし、組立ライン上の指定場所(製品組立位置)まで専用台車(以下、単に台車と略す。)を無人搬送車で搬送し、その指定場所では走行の過程で搬送してきた台車を解き放して置き、同台車に積んできた部品類や半製品の使用の便に供することができ、一方、前記部品類や半製品等を使用して、又は荷下ろしを行って空になった先順の台車は最先順位のものから順次に同じ無人搬送車の走行過程で牽引して次の指定場所(待機場所)まで運搬し、この待機場所ではやはり牽引してきた台車を解き放して部品類や半製品等の積み込みを行うことを可能にすると共に、同場所で既に荷積みを終えた先順の台車は最先順位のものから順次に牽引して、再び組立ラインの次の指定場所まで無人搬送車で搬送する、いわば循環型の無人搬送システムを提供することである。
特に、無人搬送車に設備した、専用台車を牽引するための牽引具と、前記牽引具により無人搬送車の走行過程で自動的に牽引されるように台車に設備され、しかも無人搬送車の走行過程で牽引解除も自動的に行える被牽引具と、及び特定の場所で一列をなして待機する一群の台車の相互間を連結して待機状態を一体化させる連結具と被連結具の対、並びに前記一群の台車列から最先順位の専用台車を無人搬送車が引き出すと、一群の台車列は一体的に一定位置まで前進して前詰めが行われた上で、前記最先順位の専用台車と次順位の専用台車との連結を特定位置で解き放す連結解除具とにより構成した、簡易で純機械的なからくり方式を実施でき、システム全体の電子制御は行わないで、電子制御は一切用いず、システムの配置換えや変更等を至極簡単に行えて使い勝手の良い、無人搬送車による台車の自動搬送システムを提供することである。
更には台車群の前詰め(台車列を一体的に一定位置まで前進させる)操作に他の動力源を一切必要とせず、専用台車を牽引する無人搬送車の走行を利用して行うことができ、その分の構成を簡素化した自動搬送システムを提供することである。
【課題を解決するための手段】
【0006】
上記した従来技術の課題を解決する手段として、請求項1に記載した発明に係る無人搬送車による台車の自動搬送システムは、
無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2(以下、単に台車と略す。)との組み合わせで構成され、
無人搬送車1は、路面3に敷設した誘導路を検出しつつ同誘導路に沿って走行する自走機能を備え、前記台車2の車幅方向の車輪20、20間の床下空間を潜って走行し通過可能な形態に構成され、上面部に台車2を牽引する牽引ピン4を上向きに備えており、
台車2には、車幅方向の車輪20、20間の床下面に、前記無人搬送車1の牽引ピン4が通過する移動経路に沿って平行な配置に、同牽引ピン4が突き当たって走行推進力を付与される牽引用フラップ53を備えた被牽引具5が設置されており、この被牽引具5に、当該台車2が先順の台車へ突き当たり一定ストローク押し込まれると前記牽引用フラップ53を駆動して牽引ピン4の突き当たり状態を解除する牽引解除用枠55が、被牽引具5の先端から一定寸法突き出され、且つ台車2の前端よりも突き出された位置を常態として後方へスライド可能に設置され、同牽引解除用枠55を前記常態位置へ復元させる手段56を備えており、
台車2は更に、その走行方向の前側又は後側に、走行方向の前後に隣接する台車2、2同士を連結する連結具7と、同連結具7が掛け止まる被連結部8とが相対応する配置に設けられ、前記連結具7はこれを被連結具から外す作用を受ける連結解除作用部71を備えており、
前記無人搬送車1で牽引走行される前記台車2の前記連結解除作用部の移動経路上の路面3には、前記連結具7と被連結部8との連結を解除させるべき位置に、前記連結解除作用部を介して連結具7を被連結部8から外す連結解除ドグ9が設置されており、
無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始し、次順の台車2と連結した連結具の連結解除作用部が連結解除ドグ9の位置へ到達し解除作用を受けた段階で前記連結を解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行することを特徴とする。
【0007】
請求項2に記載した発明は、請求項1に記載した発明に係る無人搬送車による台車の自動搬送システムにおいて、
無人搬送車1の牽引ピン4は、走行方向の前後位置に間隔を開けて2本上向きに設けられており、
台車2の被牽引具5は、前記牽引ピン4の通過を許容する下向きの溝型部材50の溝内に、前記2本の牽引ピン4、4の前後方向の間隔と同等の間隔を開けた2位置のうち走行方向前側位置には牽引用フラップ53が、後側の位置には飛び出し阻止フラップ51が、それぞれ上下方向への回動が自在に、且つ牽引ピン4の前進方向へ前下がり傾斜の姿勢で設置されており、
また、溝型部材50の溝内の走行方向の前端を含む部位に、牽引解除用枠55が前後方向へ一定のストロークをスライド自在に設置され、同牽引解除用枠55の後端部55aは後退方向への移動で前記牽引用フラップ53を上方へ前記牽引ピン4が通過し得る高さまですくい上げる傾斜面に形成されており、この牽引解除用枠55の前端55bを常時一定長さだけ溝型部材50の前端よりも突き出させ、押し込まれると前記位置へ復元させる弾性体56が牽引解除用枠55と溝型部材50との間に設置されており、
無人搬送車1が1台の台車2を牽引走行して指定場所へ到達し、そこに待機する台車列における最後尾の台車2へ、牽引台車2の被牽引具5の牽引解除用枠55が突き当たり、一定寸法L押し込まれた牽引解除用枠55の後端部55aが牽引用フラップ53をすくい上げて牽引ピン4の突き当たり状態を解除すると、無人搬送車1は当該台車2を置き放し、台車列の床下空間を潜って前進し最先順位の台車へ到達することを特徴とする。
【0008】
請求項3に記載した発明は、請求項1又は2に記載した発明に係る無人搬送車による台車の自動搬送システムにおいて、
無人搬送車1が1台の台車2を牽引走行して指定場所へ到達し、待機中の台車列における最後尾の台車2へ牽引台車2が突き当たると、最後尾の台車2の後側、又は牽引してきた台車2の前側に設けられた連結具7が、突き当たった相手の台車2の被連結部8へ結合して前後に隣接する台車相互間の連結が行われ、指定場所に待機する複数の台車同士は順次に一列の数珠繋ぎ状態に連結されることを特徴とする。
【発明の効果】
【0009】
本発明の無人搬送車による台車2の自動搬送システムは、無人搬送車1が備えた牽引ピン4と、専用台車2(以下、台車と略す。)の被牽引具5と、前後に隣接する台車2、2同士を連結する連結具7と、同連結具7が連結する被連結部8、及び連結具7を被連結部8から外す連結解除ドグ9とを主要素とする機械的なからくり方式で実施され、前記牽引ピン4は上下動させる必要がない構成なので、電子制御による駆動・制御を一切含まず、そのためシステム全体の動きを制御する制御ソフトの設計やプログラムの必要のない運転ができ実施が容易である。
更に、別個の駆動源を用いることなく、台車群の前詰め(一群の台車列を一体的に前方の一定位置へ移動させること)を、台車2を牽引する無人搬送車1により行うので、別途前詰め操作を行う必要がなく、この意味でも搬送システムの簡素化を実現できる。
即ち、本発明の無人搬送車による台車の自動搬送システムは、実施に際して無人搬送車1の用意とその誘導路の敷設、及び台車2を必要台数用意し、台車2の待機場所(荷積み又は荷下ろし等の場所)を指定する連結解除ドグ9の位置を決めて設置することにより、至極簡単に実施できる。
しかもシステムの運転内容の改変も、誘導路の敷設のやり直し、及び連結解除ドグ9の設置位置を変更するだけで簡単、容易に行えるから、システムの費用対効果を大きく高めることができる。勿論、電気の使用量も少ないので省エネルギ効果も高く、メンテナンスも容易である。
【図面の簡単な説明】
【0010】
【図1】A〜Cは本発明による自動搬送システムにおいて、無人搬送車が、搬送してきた台車を最後尾へ置き放して前進する動作の概要を示した説明図である。
【図2】A、Bは本発明による自動搬送システムにおいて、無人搬送車が、台車列の床下空間を潜って前進し、最先順位の台車を牽引し走行を開始する動作の概要を示した説明図である。
【図3】A、Bは本発明の自動搬送システムに用いる無人搬送車の一例を示した平面図と立面図である。
【図4】A、Bは本発明の自動搬送システムに用いる専用台車の一例を示した側面図と正面図である。
【図5】本発明による自動搬送システムの実施において、台車列と無人搬送車の関連する構成例を示した側面図である。
【図6】A〜Cは本発明による自動搬送システムの実施において、無人搬送車の牽引ピンが台車の被牽引具へ進入する当初段階の構成を示した説明図である。
【図7】A、Bは本発明による自動搬送システムの実施において、無人搬送車の牽引ピンが台車の被牽引具へ進入して牽引可能状態となった段階、及び同牽引ピンが被牽引具から牽引解除にされた段階の構成を示した説明図である。
【発明を実施するための形態】
【0011】
本発明の無人搬送車による台車の自動搬送システムは、無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2(以下、単に台車と略す。)との組み合わせで構成する。
無人搬送車1は、路面3に敷設した誘導路を検出しつつ同誘導路に沿って走行する自走機能を備え、前記台車2の車幅方向の車輪20、20間の床下空間を潜って走行し通過可能な形態に構成され、上面部に、台車2を牽引する前後2本の牽引ピン4、4を垂直上向きに備えている。この牽引ピン4、4は上下動させない構成である。
台車2には、車幅方向の車輪20、20間の床下面に、前記無人搬送車1の牽引ピン4が通過する移動経路に沿って平行な配置に、同牽引ピン4が突き当たって走行推進力を付与される牽引用フラップ53を備えた被牽引具5が設置されている。この被牽引具5に、当該台車2が先順の台車へ突き当たり一定ストロークL押し込まれると、前記牽引用フラップ53を駆動して牽引ピン4の突き当たり状態を解除する牽引解除用枠55が、被牽引具5の先端から一定寸法L突き出され、且つ台車2の前端よりも突き出た位置を常態として後方へスライド可能に設置され、同牽引解除用枠55を後方から前記常態位置へ復元させる手段56を備えている。
台車2には更に、走行方向の前後に隣接する台車2、2同士を連結する連結具7と、同連結具7が掛け止まる被連結部8とが相対応する配置に設けられ、連結具7はこれを被連結具8から外す作用を受ける連結解除作用部71を備えている。
前記無人搬送車1で牽引走行される前記台車2の移動経路上の路面3には、前記連結具7と被連結部8との連結を解除させるべき位置に、連結具7を被連結部8から外す連結解除ドグ9が設置されている。
無人搬送車1は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車2まで進み、最先順位の台車2の被牽引具5における牽引用フラップ53へ牽引ピン4が突き当たった段階で同台車2の牽引を開始する。
そして、次順の台車2と連結した連結具7が連結解除ドグ9の位置へ到達する位置まで前詰めが行われ、連結解除ドグ9の位置で連結具7による前記連結が解除され、無人搬送車1はそのまま最先順位の1台の台車2を牽引して前進走行する動作を繰り返す。
【0012】
上記無人搬送車1の牽引ピン4は、走行方向の前後位置に間隔を開けて2本垂直上向きに設けられる。
台車2の被牽引具5は、前記牽引ピン4の通過を許容する下向きの溝型部材50の溝内に、前記2本の牽引ピン4、4の前後方向の間隔と同じか、それよりも若干大きい間隔を開けた2位置のうち、前側位置に牽引用フラップ53が、後側の位置には飛び出し阻止フラップ51が、それぞれ上下方向への回動が自在に、且つ牽引ピン4の前進方向へ前下がり傾斜の姿勢に設置されている。
また、溝型部材50の溝内の走行方向の前端を含む部位に、牽引解除用枠55が前後方向へ一定のストロークをスライド自在に設置され、同牽引解除用枠55の後端部55aは後退方向への移動で前記連結解除用フラップ53を上方へ前記牽引ピン4が通過し得る高さまですくい上げる傾斜面に形成されている。この牽引解除用枠55の前端を常時一定の長さLだけ溝型部材50の前端よりも突き出させ、押し込まれると前記位置へ復元させる手段である弾性体56が牽引解除用枠55と溝型部材50との間に設置されている。
無人搬送車1が1台の台車2を牽引走行して指定場所へ到達し、そこに待機する台車列における最後尾の台車2へ牽引台車2の被牽引具5の牽引解除用枠55が突き当たり、一定寸法Lを押し込まれた牽引解除用枠55の後端部55aが牽引用フラップ53をすくい上げて牽引ピン4の突き当たり状態を解除した段階で、無人搬送車1は当該台車2を置き放し、そのまま台車列の床下空間を潜って前進し通過する。
なお、無人搬送車1が1台の台車2を牽引走行して指定場所へ到達し、待機中の台車列における最後尾の台車2へ突き当たる前後に、最後尾の台車2の後側、又は牽引してきた台車2の前側に設けられた連結具7が、突き当たった相手の台車2における被連結部8と結合して隣接する台車相互間の連結が行われる。かくして指定場所に待機する複数の(一群の)台車2、2同士は順次に一列の数珠繋ぎ状態の連結とされる。
【実施例1】
【0013】
以下に、本発明を図示した実施例に基づいて説明する。
本発明の無人搬送車による台車の自動搬送システムは、図1と図2に分けてシステム概要を示した通り、無人搬送車1と、該無人搬送車1により牽引し走行させて指定場所へ運ばれる専用台車2(以下、単に台車と略す。)との組み合わせで構成し実施される。
無人搬送車1は、路面3へ敷設した例えば磁気テープ等により形成した誘導路をセンサーで検出しつつ同誘導路に沿って走行する自走機能を備え、前記台車2の車幅方向(図4Bの左右方向)の車輪20、20間の床下空間を潜って走行方向へ通過可能な形態に構成されている。
この無人搬送車1の構成に関しては、例えば上記特許技術文献1記載の誘導式牽引車の構成との共通点が多いので参照できるが、更に具体的に、図3A、Bに例示した無人搬送車1について説明する。図示例は電源用バッテリー10を搭載したバッテリー台車11を牽引する構成であり、前記バッテリー10を電源とする駆動モータ12で駆動輪13を回転駆動して走行する。誘導路を検出する磁気読み取り部14の検出値を制御部15にて演算処理した結果に基づき操舵機構を自動制御して誘導路に沿い走行する自走機能を備えている。
上記駆動モータ12と駆動輪13を主要部とする駆動ユニットを組み付けたメインフレーム(車台)17の上面部中央の走行方向に、2本の平行な棒材による取り付け枠16を設け、該取り付け枠16の前後に一定の間隔を開けた2位置に、台車2を牽引する2本の牽引ピン4、4が、その台板4aを取り付け固定して垂直上向きに設置されている。2本の牽引ピン4、4は垂直上向きにしっかり固定して立てた常態であり、上下動はさせない構成である。因みに前記2本の牽引ピン4、4の設置間隔は500mm程度である。
【0014】
一方、台車2は、図4A、Bに示したとおり、車幅方向(図4Bの左右方向)の車輪20、20間の床下面に、前記無人搬送車1の牽引ピン4が通過する移動経路に沿って平行な配置で、同牽引ピン4が通過途中で突き当たり走行推進力を付与される牽引用フラップ53を備えた被牽引具5が走行方向の向きに水平に設置されている。
この被牽引具5の構成、作用の詳細は、図6と図7に分けて概念図を例示したとおりである。
被牽引具5は、図6Cに示したとおり、下向きの溝型部材50が主体をなす。この溝型部材50が、図4A、Bに示したように、台車2の車幅方向の車輪20、20間の床下面において、上記牽引ピン4が通過する移動経路に沿って平行な配置に、溝型を下向きに取り付けて固定されている。
上記下向きの溝型部材50の溝内における前後方向の2位置であって、上記2本の牽引ピン4、4の前後方向の間隔に対して、好ましくは前後2本の牽引ピン4、4がきっちり納まる(嵌る)ように略同じ間隔を開けた2箇所の位置に、若しくは前記2本の牽引ピン4、4の前後方向の間隔よりも若干大きい間隔(例えば510mm程度の間隔)を開けた2箇所の位置であって溝型部材50の中間点よりも走行方向へ少し前寄りの位置に牽引用フラップ53を設置し、そして、後方側の位置には飛び出し阻止フラップ51が、それぞれ走行方向の後端側部位を溝型部材50へピン57により上下方向への回動が自在に、且つ牽引ピン4の前進方向へ前下がりの傾斜姿勢に設置されている。
【0015】
因みに、上記飛び出し阻止フラップ51と、牽引用フラップ53の機能及び動作の差異は次に説明するとおりである。
図6Aに示したように、無人搬送車1及びその牽引ピン4は、図6Aの右側から左方へ進む。これに対して、被牽引具5の飛び出し阻止フラップ51は、図6Bで明解なとおり、牽引ピン4を受け止めるU字形状部51aを、飛び出し阻止フラップ51の前縁から右方へ切り込んで、左方に開口する形状に形成している。そして、同飛び出し阻止フラップ51の後方上部の位置がピン57で上下方向へブランコ状の回動が自在に溝型部材50へ取り付けられている。
したがって、無人搬送車1の牽引ピン4が図6Aのように右側から左方へ進んできた場合、飛び出し阻止フラップ51は、ブランコの如く牽引ピン4により押し上げられて上方へ逃げ、牽引ピン4の前進、通過を許容する。
しかし、牽引ピン4が一旦飛び出し阻止フラップ51を押し上げて通過した場合は、直ちに重力モーメントの作用で下方の元位置へ下降して復帰する。よって、その後は牽引ピン4が逆に右方へ後退しようとしても、牽引ピン4は飛び出し阻止フラップ51のU字形状部51aへ進入して突き当たり、後退動作は確実に阻止される。
【0016】
一方、牽引用フラップ53は逆に、図6Bで明解なとおり、牽引ピン4を受け止めるU字形状部53aは、牽引用フラップ53の後縁から前方(左方)へ切り込まれて後縁に開口している。つまり、飛び出し阻止フラップ51とは正反対の形状に形成されている。そして、同牽引用フラップ53の後方上部の位置がピン57で上下方向へブランコ状の回動が自在に溝型部材50へ取り付けられている。
したがって、無人搬送車1の牽引ピン4が図7Aに示すように左方へ進んできた場合、同牽引ピン4は、待ちかまえた牽引用フラップ53のU字形状部53aへ進入して突き当たる。そのため無人搬送車1は、牽引ピン4が牽引用フラップ53のU字形状部53aへ進入して突き当たった段階で、同牽引用フラップ53および被牽引具5を仲介として台車2を一体的に牽引し走行させることになる。
【0017】
ここで無人搬送車1には走行方向の前後の2位置に2本の牽引ピン4、4を立てた理由及び役割を説明する。無人搬送車1は、台車2を一体的に牽引して路面3へ敷設した誘導路に沿って走行するが、概して誘導路は曲がりくねっており、多くのカーブで成り立っている。前記カーブでは誘導路に沿って走行する無人搬送車1に対して、牽引される台車2は、牽引ピン4が1本であると、台車2が牽引ピン4を中心に水平方向への回転を生じてフラフラし、きっちりとした追随走行ができないという問題が起こる。牽引ピン4の平面形状を四角形にした嵌め合い構造にすると、前記回転をある程度は防げる。しかし、そうすると牽引ピン4と牽引用フラップ53との嵌め合いの位置関係が厳しくなるなど、牽引位置精度の技術的障害が起きてくる。したがって、牽引ピン4の平面形状は円形とするのが最適の実施形態である。しかも牽引ピン4の太さ(強度)の検討を加味すれば、台車2の走行方向の前後2箇所の位置を2本の円形断面の牽引ピン4、4で牽引を行うことが、台車2を無人搬送車1と一体的に追随走行させる上で最も合理的な構成と考えられるのである。
【0018】
次に、台車2を牽引する無人搬送車1が減速や停止する動作の状況を考えると、牽引される台車2にブレーキは働かないので、台車2は、無人搬送車1が減速や停止する度に走行の慣性力が働いて前方へそのまま進もうとする。しかし、無人搬送車1は減速や停止する関係上、1本の牽引ピン4と牽引用フラップ53との関係のみでは、見掛け上、台車2と共に牽引用フラップ53が前方へ進むのに対して、牽引ピン4は後方へ遅れることになり、当初の牽引関係は解除される。場合によっては台車2のみが前方へ進む一人歩きの状況になり不都合である。
よって、上記の不都合を未然に防止して台車2を無人搬送車1と一体的に減速や停止させる動作を実現するためには、前側位置の牽引ピン4が台車2の牽引用フラップ53のU字形状部53aへ突き当たった時点で、後側位置の牽引ピン4も後方の飛び出し阻止フラップ51のU字形状部51a内へきっちり嵌る構成とすることが肝要である。以上の検討によれば、台車2の被牽引具5に設ける前後の牽引用フラップ53と飛び出し阻止フラップ51それぞれのU字形状部53aと51a有効間隔は、無人搬送車1の前後2本の牽引ピン4、4の実効間隔と同じか、実際の動作の円滑性を考慮すると若干大きい程度が好ましいのである。
【0019】
次に、牽引ピン4が被牽引具5の牽引用フラップ53との牽引状態を解除される手段について説明する。
被牽引具5を構成する溝型部材50の溝内であって、その前端を含む走行方向の前側部分に、牽引解除用枠55が、溝型部材50の両側の側壁下部を内側へ折り返したリップ50aを利用して前後方向へ一定のストロークをスライド自在に設置されている。そして、前記牽引解除用枠55は、図4Aに示したとおり、台車1の前端よりも突き出る構成とされている。
牽引解除用枠55は溝型部材50よりも少し小さく相似な溝型材で構成され、その前端に、ウエブ部分を上向きへ直角に折り曲げた突き当たり片55bが形成されている。この牽引解除用枠55の後端部55aは、図6A及び図7Aが見やすいとおり、後退方向へ一定ストローク移動すると、上記牽引用フラップ53の前縁からその下面側へ潜り込み、同牽引用フラップ53を上方へすくい上げて(ピン57を中心に上方へ回動させて)上記牽引ピン4が通過し得る高さまで押し上げる(図7Bを参照)傾斜角及び背の高さに形成されている。一方、牽引用フラップ53の前縁には、前記作用及び動作を考慮して、前記すくい上げ動作を良好に行わせる構成として、牽引解除用枠55の後端部(傾斜面)55aの潜り込み(すくい上げ)を円滑に行わせるすくい片53bが、若干の上向き角度に形成されている。
【0020】
次に、上記の牽引解除用枠55は、上述したように前後方向へ一定のストロークをスライド自在に設置されているが、その目的は牽引ピン4の上記牽引解除動作を実現するに足るストロークのスライドを行う構成とされている。しかも牽引解除用枠55は、前端が図6A、Bのとおり常時は前記必要ストロークのスライドを生じさせるに足る長さLだけ溝型部材50の前端よりも突き出した長さで設置され、且つ台車2の前端よりも前方へ突き出す構成とされている。そして、常時は牽引解除用枠55の前端が長さLだけ溝型部材50の前端よりも突き出た状態を定位置とし、押し込まれた際には元位置へ速やかに復元させる手段として、弾性体56(図示例では引張り用のコイルバネ、ただしコイルバネに限らない。)が、牽引解除用枠55と溝型部材50との間に設置されている。
図示例の場合、弾性体56の一端は溝型部材50へ固定したバネ受け56aに止められている。これに対して、弾性体56の他端を牽引解除用枠55へ止めたバネ受け56bの位置は、溝型部材50のウエブ中央の長手方向に前記バネ受け56bを移動させる逃げ溝58内に位置され、牽引解除用枠55と共に移動可能とされている。逃げ溝58は、少なくとも前記ストロークLのスライドを許容する長さに形成されている。
つまり、牽引解除用枠55は、弾性体56により常時図6及び図7の左方向に引っ張られており、前記バネ受け56bが逃げ溝58の左端へ当たった位置に止まっている。
【0021】
上記の構成を前提として、図1Aのように無人搬送車1が1台の台車2を牽引・走行して指定場所へ到達し、そこに待機する一群の台車列における最後尾の台車2へ、牽引してきた台車2が突き当たった図1Bの段階から自動搬送システムの動作説明を始める。
牽引してきた台車2が最後尾の台車2へ突き当たると、牽引台車2の被牽引具5の牽引解除用枠55が、図7Bのように押し込まれる。すると同牽引解除用枠55の後端55aである傾斜面によって牽引用フラップ53がすくい上げられ、牽引ピン4の高さを超えた段階で牽引ピン4の牽引状態が解除される。
そのため無人搬送車1は、牽引してきた台車2を置き放して、図1B、C及び図2Aに示したように、台車列の床下空間を潜って進み、最先順位の台車2の位置に至る。
【0022】
因みに、牽引台車2が台車列の最後尾の台車2へ突き当たった状態、および一群の台車列は以下に説明するように、台車相互間を連結具7によって連結され、同連結具7が連結解除ドグ9で連結を解除されるまでは連結状態を維持するので、無人搬送車1の2本の牽引ピン4、4は何ら支障なく、台車列の床下空間を潜って進み、最先順位の台車2の位置に到達できる。
即ち、無人搬送車1が台車2を牽引・走行して、指定場所で待機中の台車列における最後尾の台車2へ突き当たるのと相前後して、図4Aと図5に示すように、最後尾の台車2の後面(又は逆に牽引してきた台車2の前面でも可、以下同じ。)から後向きに連結具7が突き出されており、同連結具7のフック部70が、突き当たってきた牽引台車2の前部(又は逆に牽引してきた台車2の後部でも可、以下同じ。)に設けられた被連結部8へ噛み付き結合して、前後に隣接する台車2、2相互間の連結が達成される。
このようにして指定場所に到達した台車は、次々と相互に隣接するもの同士が数珠繋ぎ状態に連結されて一列を成し、一定の場所に止まり待機することになる。
【0023】
前後に隣接する台車2、2同士を上記数珠繋ぎ状態に連結するための構成として、本実施例の連結具7は、図4Aが分かり易いように、走行方向の後ろ向きに先細形状に突き出し、且つ下向きに突き出た顎を有する銛形状のフック部70を備えた構成とされ、その他端がピン72により台車2のフレームへ上下方向の回動が自在に取り付けられている。また、連結具7の長さ方向の中間部位に、連結解除の作用を受ける手段として連結解除作用部71として図示例では回転自在なカムローラが設けられている。
他方、路面3には、無人搬送車1で牽引・走行する台車2の連結具7の特には連結解除作用部71の移動経路上の特定位置、具体的には上記連結具7と被連結部8との連結を解除するべき位置、即ち、指定場所の出口相当の位置に、上記連結解除作用部71を介して連結具7を押し上げて被連結部8との連結を外す連結解除ドグ9が設置されている。
この連結解除ドグ9は、図示の便宜上、図1及び図2には上向きの矢印形状で表記したが、より具体的に構成を説明すると、連結具7の連結解除作用部71であるカムローラが接触して乗り上げる直動カムと同様な作用効果を働く傾斜面(カム斜面)を備えている。そして、この連結解除ドグ9は、上記誘導路に沿った領域であって台車2へ部品や半製品を荷積みする場所(指定場所)、或いは前記部品や半製品を使用に供するため一時的に台車2を留め置くべき「指定場所」の先頭位置(出口位置)の路面上に、位置を固定して設置されている。連結解除ドグ9の前記傾斜面(カム斜面)は、連結具7の連結解除作用部であるカムローラ71を押し上げて連結具7のフック70を被連結部8から抜き外す作用に十分足りるリフト量を備えた構成とされている。
もっとも、連結具7と連結解除作用部(カムローラ)71、及び連結解除ドグ9の形状及び作用等は、上記構成の限りではない。無人搬送車1が1台の台車2を牽引・走行して指定場所へ到達し、待機中の台車列における最後尾の台車2へ突き当たるのと相前後して台車相互間の連結が達成され、そして、前記の連結は指定場所を出る一定の位置で解除できる機械式の構成であれば良く、上記構成には限らない。
【0024】
上記のようにして、指定場所へ到達し待機中の台車列が隣接する台車同士を相互に数珠繋ぎ状態に連結して一列を成す結果、各台車2それぞれの被牽引具5における牽引解除用枠55が、図7Bのように押し込まれたままの状態を維持することを意味する。よって、同被牽引具5の牽引用フラップ53は押し上げられ状態のままとなり、無人搬送車1の牽引ピン4が通過することに何ら支障ない状態に保たれることを意味する。
したがってまた、上記した無人搬送車1は、牽引してきた台車2を台車列の最後尾へ置き放したまま、図1B〜C及び図2Aに示したように、台車列の床下空間を潜って前進し最先順位の台車2の位置まで支障なく到達できることをも意味する。
かくして無人搬送車1が、指定場所で待機する一群の台車列の最先位置の台車2へ到達すると、同台車2の被牽引具5の牽引解除用枠55は何物にも邪魔されない自由な状態であるが故に、弾性体56によって突き出されている。そのため牽引用フラップ53は図6A、B及び図7Aに示したとおり、前進する牽引ピン4が突き当たる位置に復元しているので、当然、当該最先位置の台車2を牽引ピン4が牽引し走行させることになる。
こうして無人搬送車1が最先位置の台車2を牽引し走行させると、一時的には図1Cに示しているように、一群の台車列の全体を一体的に牽引する常態になる。しかし、最先位置の台車2と次順の台車2を連結した連結具7が、指定場所の出口位置に設けた連結解除ドグ9へ接触する位置まで進んだ段階(図2A)で、連結解除ドグ9の上記傾斜面(カム斜面)へ連結解除作用部であるカムローラ71が接触し押し上げられる結果、連結部7のフック70が被連結部8から浮上して抜き外される。
従って、無人搬送車1は、次順の台車2と切り離された最先位置の台車2を牽引走行することになる(図2B)。
そしてまた、一群の台車列の全体が一体的に、図1C及び図2Bに示すように連結解除ドグ9の近傍位置まで、前詰めされて待機することにもなる。
【0025】
以上に説明したとおり、本発明の自動搬送システムは、無人搬送車1が誘導路上の指定場所で相互に連結され数珠繋ぎ状態で待機する台車列の床下空間を潜って前進し、最先順位の台車2まで進むと、同最先順位の台車2の被牽引具5へ牽引ピン4が突き当たった状態で同台車2の牽引を開始する。よって一時的には一群の台車列は全体が一体的に前詰めされることになる。そして、次順の台車2と連結した連結具7の連結解除作用部であるカムローラ71が連結解除ドグ9の位置へ到達し接触することで前記連結を解除される。
よって、無人搬送車1はそのまま最先順位の1台の台車2を牽引して次の指定場所まで進む。そして、次の指定場所へ到達した台車2の被牽引具5が、待機中の台車列の最後尾の台車2へ突き当たり、牽引解除用枠55が一定量Lだけ押し込まれると、牽引用フラップ53が牽引ピン4の突き当たり状態を解除するので、牽引してきた台車2を置き放し、無人搬送車1のみが台車列の床下空間を潜って前進する。
そして、無人搬送車1が最先順位の台車2まで進み、被牽引具5の牽引用フラップ53へ牽引ピン4が突き当たると、同台車2を牽引走行する動作が再び繰り返される。
【0026】
以上に本発明を図示した実施例に基づいて説明したが、勿論、本発明は上記実施例の構成に限定されるものではない。本発明の要旨、及び技術思想を逸脱しない範囲で、当業者が必要に応じて行う設計変更や応用、変形として種々な態様で実施され得ることを、念のため申し添える。
【符号の説明】
【0027】
1 無人搬送車
2 台車
20 台車の車輪
3 路面(誘導路を含む)
4 牽引ピン
5 被牽引具
53 牽引用フラップ
55 牽引解除用枠
55a 牽引解除用枠の後端部
55b 牽引解除用枠の前端
56 復元手段(弾性体)
7 連結具
71 連結解除作用部(カムローラ)
8 被連結具
9 連結解除ドグ
50 溝型部材
51 飛び出し阻止フラップ
【特許請求の範囲】
【請求項1】
無人搬送車と、該無人搬送車により牽引し走行させて指定場所へ運ばれる専用台車との組み合わせで構成され、
無人搬送車は、路面に敷設した誘導路を検出しつつ同誘導路に沿って走行する自走機能を備え、前記専用台車の車幅方向の車輪間の床下空間を潜って走行し通過可能な形態に構成され、上面部に、専用台車を牽引する牽引ピンを上向きに備えており、
専用台車には、車幅方向の車輪間の床下面に、前記無人搬送車の牽引ピンが通過する移動経路に沿って平行な配置に、同牽引ピンが突き当たって走行推進力を付与される牽引用フラップを備えた被牽引具が設置されており、この被牽引具に、当該専用台車が先順の専用台車へ突き当たり一定ストローク押し込まれると前記牽引用フラップを駆動して牽引ピンの突き当たり状態を解除する牽引解除用枠が、被牽引具の先端から一定寸法突き出され、且つ専用台車の前端よりも突き出された位置を常態として後方へスライド可能に設置され、同牽引解除用枠を後方から前記常態位置へ復元させる手段を備えており、
専用台車には更に、その走行方向の前側又は後側に、走行方向の前後に隣接する専用台車同士を連結する連結具と、同連結具が掛け止まる被連結部とが相対応する配置に設けられており、前記連結具は、該連結具を被連結部から外す作用を受ける連結解除作用部を備えており、
前記無人搬送車で牽引走行される前記専用台車の前記連結解除作用部の移動経路上の路面には、前記連結具と被連結部との連結を解除させるべき位置に、前記連結解除作用部を介して連結具を被連結部から外す連結解除ドグが設置されており、
無人搬送車は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車まで進み、最先順位の専用台車の被牽引具における牽引用フラップへ牽引ピンが突き当たった段階で同専用台車の牽引を開始し、次順の専用台車と連結した連結具の連結解除作用部が連結解除ドグの位置へ到達し解除作用を受けた段階で前記連結を解除され、
無人搬送車はそのまま最先順位の専用台車を牽引して前進走行することを特徴とする、無人搬送車による台車の自動搬送システム。
【請求項2】
無人搬送車の牽引ピンは、走行方向の前後位置に間隔を開けて2本上向きに設けられており、
専用台車の被牽引具は、前記牽引ピンの通過を許容する下向きの溝型部材の溝内に、前記2本の牽引ピンの前後方向の間隔と同等の間隔を開けた2位置のうち走行方向前側の位置に牽引用フラップが、後側の位置には飛び出し阻止フラップが、それぞれ上下方向への回動が自在に、且つ牽引ピンの前進方向へ前下がり傾斜の姿勢で設置されており、
また、溝型部材の溝内の走行方向の前端を含む部位に、牽引解除用枠が前後方向へ一定のストロークをスライド自在に設置され、同牽引解除用枠の後端部は後退方向への移動で前記牽引用フラップを上方へ前記牽引ピンが通過し得る高さまですくい上げる傾斜面に形成されており、この牽引解除用枠の前端を常時一定長さだけ溝型部材の前端よりも突き出させ、押し込まれると前記位置へ復元させる弾性体が牽引解除用枠と溝型部材との間に設置されており、
無人搬送車が1台の専用台車を牽引走行して指定場所へ到達し、そこに待機する台車列における最後尾の専用台車へ牽引台車の被牽引具の牽引解除用枠が突き当たり、一定寸法押し込まれた牽引解除用枠の後端部が牽引用フラップをすくい上げて牽引ピンの突き当たり状態を解除した段階で無人搬送車は当該牽引台車を置き放し、台車列の床下空間を潜って前進し最先順位の専用台車へ到達することを特徴とする、請求項1に記載した無人搬送車による台車の自動搬送システム。
【請求項3】
無人搬送車が1台の専用台車を牽引走行して指定場所へ到達し、待機中の台車列における最後尾の専用台車へ牽引台車が突き当たると、最後尾の専用台車の後側、又は牽引してきた専用台車の前側に設けられた連結具が、突き当たった相手の専用台車における被連結部へ結合して前後に隣接する専用台車相互間の連結が行われ、指定場所に待機する複数の専用台車同士は順次に一列の数珠繋ぎ状態に連結されることを特徴とする、請求項1又は2に記載した無人搬送車による台車の自動搬送システム。
【請求項1】
無人搬送車と、該無人搬送車により牽引し走行させて指定場所へ運ばれる専用台車との組み合わせで構成され、
無人搬送車は、路面に敷設した誘導路を検出しつつ同誘導路に沿って走行する自走機能を備え、前記専用台車の車幅方向の車輪間の床下空間を潜って走行し通過可能な形態に構成され、上面部に、専用台車を牽引する牽引ピンを上向きに備えており、
専用台車には、車幅方向の車輪間の床下面に、前記無人搬送車の牽引ピンが通過する移動経路に沿って平行な配置に、同牽引ピンが突き当たって走行推進力を付与される牽引用フラップを備えた被牽引具が設置されており、この被牽引具に、当該専用台車が先順の専用台車へ突き当たり一定ストローク押し込まれると前記牽引用フラップを駆動して牽引ピンの突き当たり状態を解除する牽引解除用枠が、被牽引具の先端から一定寸法突き出され、且つ専用台車の前端よりも突き出された位置を常態として後方へスライド可能に設置され、同牽引解除用枠を後方から前記常態位置へ復元させる手段を備えており、
専用台車には更に、その走行方向の前側又は後側に、走行方向の前後に隣接する専用台車同士を連結する連結具と、同連結具が掛け止まる被連結部とが相対応する配置に設けられており、前記連結具は、該連結具を被連結部から外す作用を受ける連結解除作用部を備えており、
前記無人搬送車で牽引走行される前記専用台車の前記連結解除作用部の移動経路上の路面には、前記連結具と被連結部との連結を解除させるべき位置に、前記連結解除作用部を介して連結具を被連結部から外す連結解除ドグが設置されており、
無人搬送車は、誘導路上の指定場所で相互に連結されて一列状態で待機する台車列の床下空間を潜って最先順位の台車まで進み、最先順位の専用台車の被牽引具における牽引用フラップへ牽引ピンが突き当たった段階で同専用台車の牽引を開始し、次順の専用台車と連結した連結具の連結解除作用部が連結解除ドグの位置へ到達し解除作用を受けた段階で前記連結を解除され、
無人搬送車はそのまま最先順位の専用台車を牽引して前進走行することを特徴とする、無人搬送車による台車の自動搬送システム。
【請求項2】
無人搬送車の牽引ピンは、走行方向の前後位置に間隔を開けて2本上向きに設けられており、
専用台車の被牽引具は、前記牽引ピンの通過を許容する下向きの溝型部材の溝内に、前記2本の牽引ピンの前後方向の間隔と同等の間隔を開けた2位置のうち走行方向前側の位置に牽引用フラップが、後側の位置には飛び出し阻止フラップが、それぞれ上下方向への回動が自在に、且つ牽引ピンの前進方向へ前下がり傾斜の姿勢で設置されており、
また、溝型部材の溝内の走行方向の前端を含む部位に、牽引解除用枠が前後方向へ一定のストロークをスライド自在に設置され、同牽引解除用枠の後端部は後退方向への移動で前記牽引用フラップを上方へ前記牽引ピンが通過し得る高さまですくい上げる傾斜面に形成されており、この牽引解除用枠の前端を常時一定長さだけ溝型部材の前端よりも突き出させ、押し込まれると前記位置へ復元させる弾性体が牽引解除用枠と溝型部材との間に設置されており、
無人搬送車が1台の専用台車を牽引走行して指定場所へ到達し、そこに待機する台車列における最後尾の専用台車へ牽引台車の被牽引具の牽引解除用枠が突き当たり、一定寸法押し込まれた牽引解除用枠の後端部が牽引用フラップをすくい上げて牽引ピンの突き当たり状態を解除した段階で無人搬送車は当該牽引台車を置き放し、台車列の床下空間を潜って前進し最先順位の専用台車へ到達することを特徴とする、請求項1に記載した無人搬送車による台車の自動搬送システム。
【請求項3】
無人搬送車が1台の専用台車を牽引走行して指定場所へ到達し、待機中の台車列における最後尾の専用台車へ牽引台車が突き当たると、最後尾の専用台車の後側、又は牽引してきた専用台車の前側に設けられた連結具が、突き当たった相手の専用台車における被連結部へ結合して前後に隣接する専用台車相互間の連結が行われ、指定場所に待機する複数の専用台車同士は順次に一列の数珠繋ぎ状態に連結されることを特徴とする、請求項1又は2に記載した無人搬送車による台車の自動搬送システム。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−114307(P2013−114307A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257400(P2011−257400)
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000245830)矢崎化工株式会社 (47)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【出願人】(000245830)矢崎化工株式会社 (47)
【Fターム(参考)】
[ Back to top ]