
無人搬送車
【課題】上下構造間に配置されるハーネスのねじれ解消に好適な無人搬送車を提供する。
【解決手段】夫々駆動モータ8により独立して駆動される駆動輪11を両端に備えるアクスル軸7を平面内で旋回させて車両の推進方向を変更可能な走行駆動ユニット2を備える無人搬送車1であり、前記アクスル軸7をアクスル軸7自身の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支持する支軸3と、前記アクスル軸7の前記支軸3回りの旋回の向きと量に応じて、前記アクスル軸7を長手方向に延びるそれ自身の軸回りに回転させるアクスル軸回転手段(21〜26)と、前記車両の車体上部構造に配置された制御手段から前記支軸3内を通して前記支軸3の先端から前記アクスル軸7の軸端に架渡し、アクスル軸7内を通って前記駆動モータ7および周辺機器10へ接続されるハーネス12と、を備えるようにした。
【解決手段】夫々駆動モータ8により独立して駆動される駆動輪11を両端に備えるアクスル軸7を平面内で旋回させて車両の推進方向を変更可能な走行駆動ユニット2を備える無人搬送車1であり、前記アクスル軸7をアクスル軸7自身の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支持する支軸3と、前記アクスル軸7の前記支軸3回りの旋回の向きと量に応じて、前記アクスル軸7を長手方向に延びるそれ自身の軸回りに回転させるアクスル軸回転手段(21〜26)と、前記車両の車体上部構造に配置された制御手段から前記支軸3内を通して前記支軸3の先端から前記アクスル軸7の軸端に架渡し、アクスル軸7内を通って前記駆動モータ7および周辺機器10へ接続されるハーネス12と、を備えるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行駆動ユニットによる駆動方向を変更することで車両の向きを変更することなく進路を変更可能な無人搬送車に関し、特に、方向変換可能な走行駆動ユニットと車両上部構造とに跨って配置される電力供給用および信号用のハーネスのねじれを解消に好適な無人搬送車に関するものである。
【背景技術】
【0002】
従来から磁気テープが交差する分岐路等において無人搬送車の向きを変更することなく車輪の向きを分岐方向に切換えて分岐走行可能な無人搬送車が提案されている(特許文献1参照)。
【0003】
これは、床面に敷設した軌道に沿って走行する無軌条式無人搬送車であり、台車フレームの中央に縦支軸および旋回ブラケットを介在させて左右一対の駆動輪を旋回可能に配置して備えると共に、その前後にキャスタ輪を備える無軌条式無人搬送車であり、台車フレームを前後走行の姿勢に固定のまま、左右一対の駆動輪を縦支軸および旋回ブラケットにより台車フレームの中心の回りに旋回操作して駆動輪の向きを前後走行と横行走行に切換えることができるようにしている。
【特許文献1】特開平5−270396号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上記従来例のように、下部構造に縦支軸および旋回ブラケットを介在させて左右一対の駆動輪を旋回可能に配置して備える無人搬送車や自走ロボットにおいては、バッテリや制御装置が上部構造に配置されているため、駆動輪の駆動モータへ電力を供給する電力線や駆動輪の回転を検出するセンサへの信号線等のハーネス類を旋回する下部構造と上部構造との間で配線する必要がある。このハーネス類は下部構造の旋回時に捻られるため、路面や台車の上部構造と干渉したり、場合によっては駆動輪に巻き込まれて断線する虞があった。特に、大きく下部構造を旋回させた場合には上記不具合が顕著となる。このハーネス類のねじれを解消するために、下部構造の旋回範囲を制限することも考えられるが、その場合には、無人搬送車や自走ロボットの方向変換機能に制限が発生するという不具合を生ずる。
【0005】
そこで本発明は、上記問題点に鑑みてなされたもので、車両の上下構造間に配置されるハーネス類のねじれ解消に好適な無人搬送車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、夫々駆動モータにより独立して駆動される駆動輪を両端に備えるアクスル軸を平面内で旋回させて車両の推進方向を変更可能な走行駆動ユニットを備える無人搬送車において、前記アクスル軸をアクスル軸自身の長手方向の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支持する支軸と、前記アクスル軸の前記支軸回りの旋回の向きと量に応じて、前記アクスル軸を長手方向に延びるそれ自身の軸回りに回転させるアクスル軸回転手段と、前記車両の車体上部構造に配置された制御手段から前記支軸内を通して前記支軸の先端から前記アクスル軸のいずれか一方の軸端側に架渡し、アクスル軸の軸端からアクスル軸内を通って前記駆動モータおよび周辺機器へ接続されるハーネスと、を備えるようにした。
【発明の効果】
【0007】
したがって、本発明では、アクスル軸をアクスル軸自身の長手方向の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支軸に支持させ、アクスル軸の支軸回りの旋回の向きと量に応じて、アクスル軸回転手段によりアクスル軸を長手方向に延びるそれ自身の軸回りに回転させることにより、車両の車体上部構造に配置された制御手段から前記支軸内を通して支軸の先端から前記アクスル軸のいずれか一方の軸端側に架渡し、アクスル軸の軸端からアクスル軸内を通って駆動輪の駆動モータへ接続される電力供給線の先端側のアクスル軸がハーネスのねじれを解消する方向に常に回転されることとなり、ハーネスのねじれを解消することができ、アクスル軸を連続的に大きく旋回させても、ハーネスが捩られて路面や台車の上部構造と干渉したり、駆動輪に巻き込まれて断線することを防止できる。このため、アクスル軸の旋回範囲を制限して無人搬送車や自走ロボットの方向変換機能を制限するという不具合も発生しない。
【発明を実施するための最良の形態】
【0008】
以下、本発明の無人搬送車を図1〜図8に示す一実施形態に基づいて説明する。図1は無人搬送車の走行駆動ユニットのレイアウトを示す平面図、図2は走行駆動ユニットの概略構成図、図3および図4は走行駆動ユニットの詳細を示す断面図、図5および図6は走行駆動ユニットの方向変更の制御を説明する概略図および制御ブロック図、図7および図8は本実施形態および比較例の走行駆動ユニットの走行反力支持機構の作用を説明する説明図、図9は本実施形態の走行反力支持機構のベクトル構成を説明する図である。
【0009】
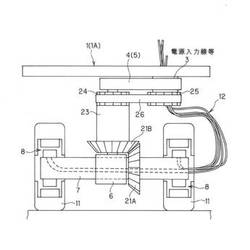
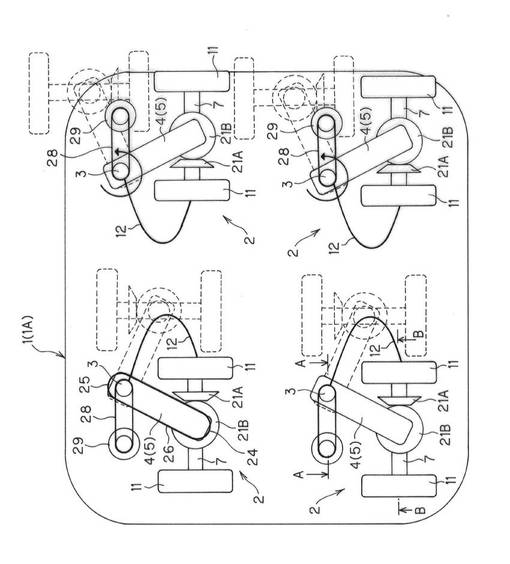
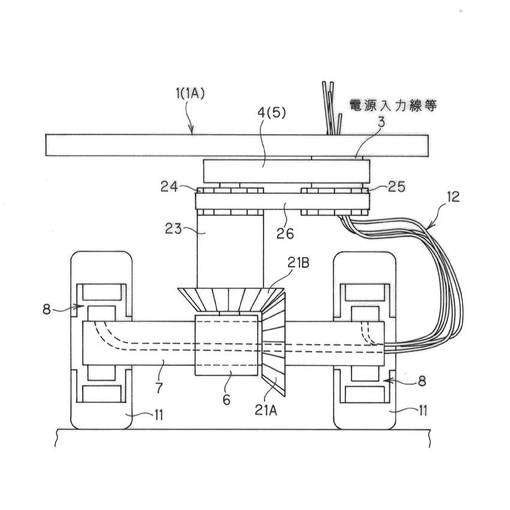
図1において、本実施形態における無人搬送車1は、上部構造を構成する車体1Aの下部の夫々の隅に位置させて四組の走行駆動ユニット2を備える。この走行駆動ユニット2は、図2に示すように、車体1Aから床面に向けて立設させて固定された支軸3と、支軸3に旋回可能に支持されたアーム5と、その先端から下方に突出させて縦軸6を備えるオフセットアーム4と、オフセットアーム4の縦軸6に直交する横方向に配置され且つ長手方向の延びる軸心回りに回動可能にその長手方向中央部が縦軸6に軸支されるアクスル軸7と、アクスル軸7の両端部に配置され、駆動モータ8、減速機9および駆動モータ8のモータエンコーダ10を内蔵し、内蔵する駆動モータ8からの駆動力により減速機9を介して駆動される駆動輪11と、を備える。
【0010】
前記オフセットアーム4とアクスル軸7とは、図1に示すように、平面図上で一体となって旋回可能となっている。前記左右の駆動モータ8への電力線および各モータエンコーダ10よりの信号線等のハーネス12は、前記アクスル軸7の軸端から前記支軸3の軸端間に差渡した図示しないハーネスプロテクタ内および支軸3内を経由して上部構造に配置される図示しないコントローラおよびバッテリに接続されている。
【0011】
また、走行駆動ユニット2は、前記アクスル軸7に固定された傘歯車21Aと、前記オフセットアーム4の縦軸6回りに回転可能に配置した傘歯車21Bとがギヤ比を「1」として噛合わされている。そして、前記縦軸6回りに回転可能に設けた傘歯車21Bに連結された中空軸部23に一体に固定したプーリ24と前記支軸3に固定したプーリ25とにベルト26を巻掛けて1:1のプーリ比で連結されている。これら傘歯車21A、21Bおよびプーリ巻掛け部24〜26はアクスル軸回転機構を構成している。なお、前記アクスル軸7とオフセットアーム4の縦軸6回りに回転可能に配置した中空軸部23とは、傘歯車21A、21Bを介して回転を伝達するものについて説明したが、図示しないが、両者が1:1で回転伝導するものであれば、他の手段を用いるものであってもよい。また、中空軸部23と支軸3とは、プーリ24、25および巻掛けベルト26を用いて回転を伝達するものについて説明したが、中空軸部23と支軸3とに夫々歯車を固定し、これらの歯車同士をアイドラギヤを介して噛合わせるものであってもよい。
【0012】
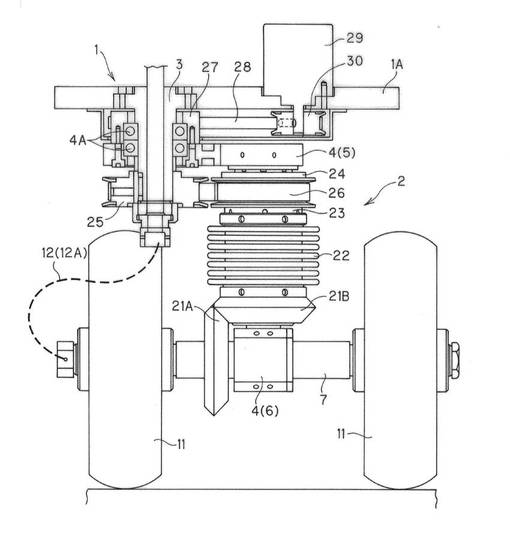
図3に示す走行駆動ユニット2の断面図は、図1におけるA−A線に沿う支軸の中心を含む断面図である。図3に示すように、支軸3は中空状に構成されて車体1Aに固定されており、オフセットアーム4のアーム部5を一対のベアリング4Aを介して旋回可能に支持しており、その先端にプーリ25を回転しないように固定して備える。前記支軸3の中空穴内には、上部構造に配置される、図示しないコントローラおよびバッテリに繋がる電力線や信号線等のハーネス12が挿通され、下方の開口端からハーネスプロテクタ12A内を通り、アクスル軸7の軸端からアクスル軸7内に入り、各駆動輪11の内部に配置される前記モータ8およびモータエンコーダ10へ電気的に接続される。
【0013】
前記走行駆動ユニット2の支軸3回りの旋回は、オフセットアーム4の支軸3側端にプーリ27を一体に固定し、このプーリ27に巻掛けたベルト28の他端側をステアリングエンコーダ29の検出プーリ30に巻掛けることにより、ステアリングエンコーダ29により検出することができ、検出された旋回角信号はコントローラに出力される。
【0014】
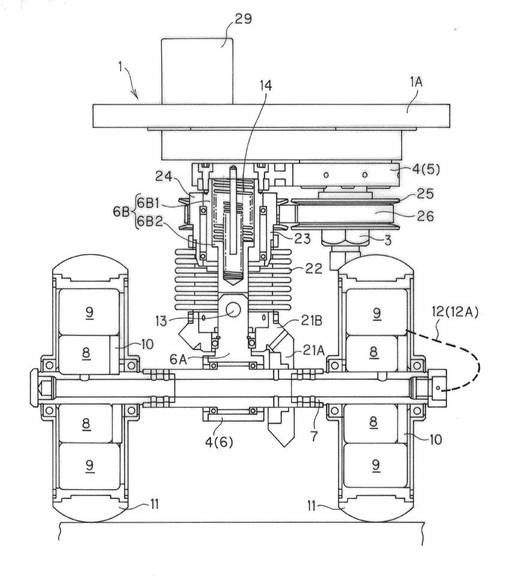
図4に示す走行駆動ユニット2の断面図は、図1におけるB−B線に沿う縦軸6およびアクスル軸7の中心を含む断面図である。図4に示すように、オフセットアーム4の縦軸6は、アクスル軸7の中央部を軸受を介して回転可能に支持する下部軸6Aと下部軸6Aにピン13を介して連結された上部軸6Bとを備える。上部軸6Bは軸方向上部6B1と下部6B2とに分割されると共に入れ子式に組み合わされ、内部に挿入されたサスペンションスプリング14により伸長付勢されて形成されている。サスペンションスプリング14は、駆動輪11による走行中に駆動輪11が床面の凹凸等により上下動される際の衝撃吸収を行う。縦軸6の分割された上部軸6Bには、プーリ24を一体に備えた中空軸23を軸受を介して回転自在に支持している。また、縦軸6のピン13を介して連結された下部軸6Aには、中空状に形成した傘歯車21Bを軸受を介して回転可能に支持している。この傘歯車21Bと前記プーリ24を備える中空軸23とはフレキシブルベローズ22を介して連結され、両者の軸方向の相対移動を許容するも回転方向には一体となって回転するように構成している。前記傘歯車21Bは、アクスル軸7に固定された傘歯車21Aと1:1で噛合うよう構成している。
【0015】
また、前記駆動輪11の内部には、詳細な機構の図示を省略するが、駆動モータ8のステータが内周に配置されてアクスル軸7に固定され、外周部において減速ギヤ9へ駆動力を出力可能に回転子が配置されて構成される。なお、駆動モータ8は前記した構造に限定されるものではないが、出力部からの駆動反力がアクスル軸7に受持たれるものであればよい。また、減速ギヤ9はモータ8から出力された駆動力を減速して駆動輪11に回転駆動力として伝達する。減速ギヤ9は駆動輪11内のアクスル軸7回りに配置される駆動モータ8が占める空間を除く環状空間内に配置されるものであるため、遊星歯車機構による減速ギヤ9を用いることが望ましい。駆動モータ8の回転はモータエンコーダ10により検出されてコントローラにフィードバックされる。
【0016】
以上の構成のアクスル軸回転機構では、後述するステアリング動作に応じて支軸3回りにアクスル軸7およびオフセットアーム4が旋回する場合に、縦軸6に回転自在に支持しているプーリ24と支軸3に固定のプーリ25とにベルト26が巻掛けられているため、支軸3回りの公転のみが許容され、中空軸23および傘歯車21Bも同様に公転する(中空軸23の向きが予めセットした方向にのみ向き、旋回によっても向きが変化しない)。即ち、中空軸23はオフセットアーム4が旋回する方向に対して逆方向に回転されて、支軸3に対する中空軸23の相対回転差を戻す方向に回転される。そして、オフセットアーム4が支軸3回りに一周した際に、中空軸23が支軸3に対しての相対回転を戻す方向に丁度一回転する割合で回転される。この中空軸23の回転は傘歯車21A、21B同士の噛合いにより、アクスル軸7に伝達されて、アクスル軸7はオフセットアーム4が支軸3回りに一周した際に、同様にねじれとは反対側に丁度1回転されることとなる。したがって、支軸3とアクスル軸7とをハーネス類12を収容して連結するハーネスプロテクタ12Aも、両端が相対的な回転差を生じないこととなるため、両者に同期して回転し、ねじりが生ずることが防止される。
【0017】
前記走行駆動ユニット2による車両の駆動方向は、前記両駆動輪11が夫々駆動モータ8により互いに等速で駆動される場合には、アクスル軸7は支軸回りに旋回することなく、アクスル軸7と直交する方向(駆動方向)に、アクスル軸7を介して支軸3を押し、車両を移動させる。この場合には、両駆動輪11の駆動方向の合成力が一致される。また、前記両駆動輪11の平均速度が零となる場合、即ち、両駆動輪11が互いに反対方向に等速で駆動される場合には、支軸3回りにアクスル軸7およびオフセットアーム4を回動させて、支軸3への駆動方向を変更(操舵操作、ステアリング操作)することができる。なお、左右駆動輪11の駆動速度に差を持たせた場合には、支軸3回りにアクスル軸7およびオセットアーム4を回動させつつ両駆動輪11の平均速度に応じて支軸3を押動して車両を走行させることもできる。
【0018】
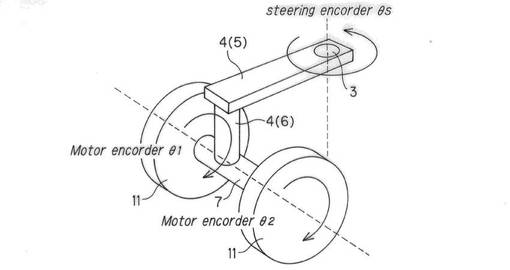
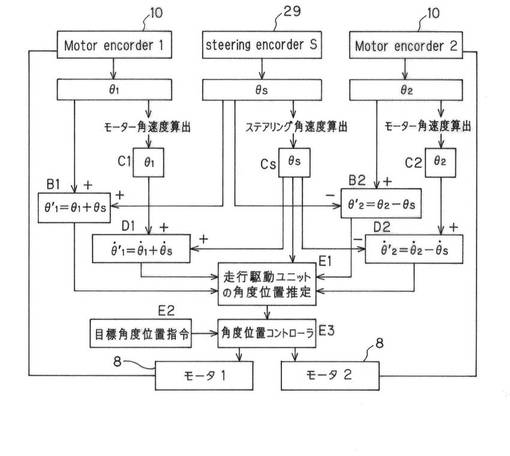
図5は走行駆動ユニット2に設けられている回転検出センサ10、29による検出要領を示しており、各矢印で示す方向を夫々正とし、矢印と反対の方向を負としている。また、図6は走行駆動ユニット2の操舵操作の制御ブロックを示すものである。以下、本実施形態の無人搬送車1における走行駆動ユニット2の操舵操作について、図6に示す制御ブロックに基づいて説明する。
【0019】
前記駆動モータ8の回転角θ1、θ2は各モータエンコーダ10により検出され、オフセットアーム4の旋回角θsはステアリングエンコーダ29により検出される。各駆動モータ8の回転角θ1、θ2は、オフセットアーム4の旋回に起因するアクスル軸7自体のアクスル軸7回りの回転成分θsを含んでいるために、ブロックB1、B2において、アクスル軸7の軸回りの回転成分θsの加算補正および減算補正が実行されて、各々の実回転角が演算される。また、ブロックC1、C2、Csにより各モータ8の角速度(dθ1/dt、dθ2/dt)およびオフセットアーム4によるステアリング角速度(dθs/dt)が演算され、ブロックD1、D2において、アクスル軸7の軸回りの角速度成分(dθs/dt)の加算補正および減算補正が実行されて、各々の実角速度が演算される。そして、ブロックE1において、ブロックB1、B2、D1、D2の演算結果に基づいて、走行駆動ユニット2の角度位置が常に推定される。
【0020】
したがって、ブロックE2による目標角度位置指令(例えば、車両直進時を基準として、左操舵方向を正、右操舵方向を負とする角度信号)が与えられると、ブロックE3において、目標角度位置指令とブロックE1よりの角度位置推定値との差分が演算され、その差分に応じて各駆動モータ8が駆動され、目標角度位置指令に角度位置推定値が到達するよう制御される。
【0021】
したがって、目標角度位置指令E2による指令角度位置が変更された場合には、新たな指令角度位置となるよう左右の駆動モータ8が夫々差動制御されて走行駆動ユニット2のステアリング角度がアクスル軸7の長手方向の軸回りの回転を織込みつつ制御される。また、目標角度位置指令E2による指令角度位置を維持しつつ走行させる場合であっても、路面からの外乱等によりその進行方向に乱れが生じる可能性がある場合であっても、アクスル軸7の長手方向の軸回りの回転を織込みつつその進行方向を維持させることができる。
【0022】
車両の進行方向は、車両の4隅に配置されている各走行駆動ユニット2の夫々の駆動方向に応じて様々に変化させることができる。
【0023】
車両を真っ直ぐに進ませる場合には、これらの走行駆動ユニット2を全て同じ方向(車両の前方、後方、横方向、斜め方向等)に操舵させて各駆動輪11を同一方向に同一速度で駆動することにより車両を姿勢(向き)を変化させることなく、その方向に真っ直ぐに走行させることができる。図1に実線で示す状態は、車両を前進走行させる場合を示し、破線で示す状態は車両をその姿勢を変化させることなく横方向に走行させる場合を示している。
【0024】
車両を旋回させる場合には、夫々のアクスル軸7の延長線が旋回させようとする中心(旋回中心)で交差するよう夫々の走行駆動ユニット2の操舵角(例えば、大回りであれば前左右の走行駆動ユニット2のみを操舵、小回りであれば前後左右の走行駆動ユニット2を操舵)を演算し、角操舵角となるよう夫々の駆動輪11の駆動速度を制御することで、車両を旋回させることができる。
【0025】
また、車両をその場旋回させる場合には、車両中心を旋回中心とするよう夫々の走行駆動ユニット2の操舵角度位置を演算し、夫々の走行駆動ユニット2を必要とする操舵角度に制御して、各走行駆動ユニット2の各駆動輪11を夫々等速で駆動することにより、車両をその場旋回させることができる。
【0026】
そして、本実施形態の無人搬送車1においては、図1に示すように、車両左右の走行駆動ユニット2間では、左側の前後の走行駆動ユニット2においては、アクスル軸7に配置する傘歯車21Aが右側(車両左右方向の中央側)に配置され、支軸3に連なるハーネス類12のハーネスプロテクタ12Aのアクスル軸7への接続口も右側(車両左右方向の中央側)に配置されている。他方、右側の前後の走行駆動ユニット2においては、アクスル軸7に配置する傘歯車21Aが左側(車両左右方向の中央側)に配置され、支軸3に連なるハーネス類12のハーネスプロテクタ12Aのアクスル軸7への接続口も左側(車両左右方向の中央側)に配置されている。即ち、車両の左右の走行駆動ユニット2は、左右で対称に配置されている。
【0027】
オフセットアーム4の旋回に伴うアクスル軸7の軸回りの回転は、左側の走行駆動ユニット2では車両中央側である右側にアクスル軸7側の傘歯車21Aが配列されているのに対し、右側走行駆動ユニット2では車両中央側である左側にアクスル軸7側の傘歯車21Aが配列されていることにより、左右の走行駆動ユニット2で反対方向とすることができ、この結果、夫々のアクスル軸7の車両中央側端面より支軸に連なるハーネス類12のハーネスプロテクタ12Aを接続することができる。
【0028】
ところで、本実施形態の無人搬送車1においては、平面図示状態において、アクスル軸7に対してオフセットアーム4を直交させることなくアクスル軸7に配置されている傘歯車21Aがある側に傾斜させて配置され、縦軸6の軸心に対して支軸3の軸心が距離S2だけアクスル軸7方向にオフセットさせて配置している。
【0029】
即ち、車両左右の走行駆動ユニット2間では、左側の前後の走行駆動ユニット2においては、アクスル軸7に対して支軸3が右側(車両左右方向の中央側)にオフセットされ、右側の前後の走行駆動ユニット2においては、アクスル軸7に対して支軸3が左側(車両左右方向の中央側)にオフセットされている。
【0030】
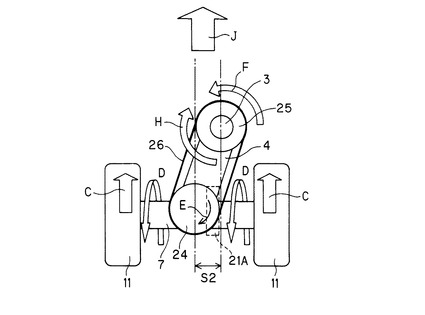
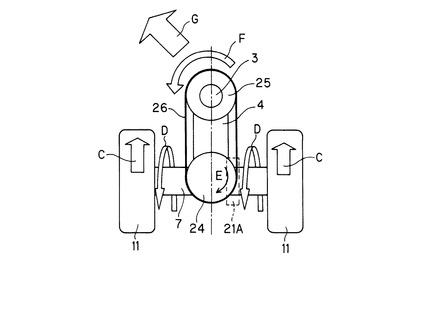
図7は車両の左前の走行駆動ユニット2を抜出して示すものであり、図8はオフセットアーム4がアクスル軸7に対して直角にレイアウトされた比較例を示している。図7および図8に示す走行駆動ユニット2の駆動輪11に夫々駆動モータ8により前進方向Cの駆動力を加えた場合、アクスル軸7には駆動輪11の駆動力に対する反力が加わる。この反力は駆動力とは反対方向(図中矢印D方向)にアクスル軸7を回転させる方向に作用し、この作用力は傘歯車21A、21B同士の噛合いにより中空軸23に伝達され、プーリ24を回転させるよう作用する(矢印E参照)。このプーリ24に加わる回転力は、ベルト26の一方(図示例では、右側)の張力を増大させる一方、他方(左側)の張力を低下させる。このベルト張力のアンバランスによりオフセットアーム4を矢印Fの方向(ここでは、反時計方向)に旋回させようとするモーメントが生ずる。
【0031】
図8に示す比較例では、前記オフセットアーム4の旋回モーメントを打消す作用力はないため、オフセットアーム4が、支軸3を中心として図中反時計方向に回動して、走行駆動ユニット2の進行方向を左前方に変化させ、車両の進路が矢印G方向に変化することとなる。
【0032】
しかしながら、本実施形態である図7に示す走行駆動ユニット2においては、支軸3と縦軸6とが横方向にオフセットS2されているため、駆動輪11の駆動力が作用してアクスル軸7が支軸3側に押圧される(左右駆動輪11が路面に作用する駆動力と同等の前進方向の力となる)と、この前進力にオフセットS2を乗算した矢印H方向の駆動によるモーメントが発生する。この駆動によるモーメントHは、前記オフセットアーム4の旋回モーメントFとは逆方向であり、両者が互いに相殺して、オフセットアーム4は旋回される作用は生ぜず、走行駆動ユニット2の進行方向は車両前進方向Jに維持される。ここでは、代表的に車両の左前の走行駆動ユニット2について説明したが、他の走行駆動ユニット2、例えば、右前の走行駆動ユニット2においても、各モーメントの方向が逆となるが、同様に作用し、車両の進行方向を前進方向に維持する。
【0033】
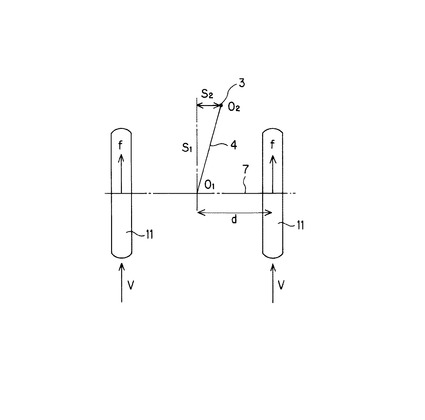
図9は、走行駆動ユニット2(右側の走行駆動ユニット2)の略図であり、支軸3のオフセットS2の設定方法について、以下に説明する。ここでは、駆動輪11の半径を「r」、両駆動輪11の中心点は「O1」、中心点から駆動輪11の接地点の距離を「d」、二つのオフセットをそれぞれ「S1、S2」、支軸3を「O2」としている。駆動輪11から路面に加える推進力を「f」としている。
【0034】
走行駆動ユニット2は、図6に示すように左右駆動輪11が制御されたアクティブ駆動され、左右駆動輪11のトルクのバランスは取れた理想状態と想定して、両駆動輪11に同じ制御指令を出す場合、同じ速度Vで回転し、走行駆動ユニット2はVで直進する。駆動輪11の出力トルクM1は、M1=f・rである。
【0035】
駆動輪11の推進力fによる支軸O2に対する回転モーメントN2は、N2=f(d+S2)−f(d−S2)=2f・S2と表わすことができ、この回転モーメントN2は、この走行駆動ユニット2においては時計回りする傾向がある。
【0036】
一方、駆動輪11の出力トルクに対する反トルクM’1はアクスル軸7を軸回りに回転させるよう作用し、傘歯車21、中空軸23を経由して中空軸23に固定のプーリ24に作用し、ベルト26を介して支軸3に回転モーメントN1として作用する。
【0037】
支軸O2に対する回転モーメントN1は、N1=2M’1=2(f・r)であり(注:二つの駆動輪11によるトルクであるため2倍している)、この回転モーメントN1は、この走行駆動ユニット2においては反時計回りする傾向がある。
【0038】
前記回転モーメントN1と回転モーメントN2を釣り合わせて相殺するためには、N1=N2、即ち、2f・r=2f・S2と設定する必要がある。したがって、オフセットS2=駆動輪半径rとすることで、両者は相殺することができる。
【0039】
なお、上記実施形態において、アクスル軸7の前記支軸3回りの旋回に応じて、前記アクスル軸7を長手方向に延びるそれ自身の軸回りに前記旋回量と同一角度だけ回転させるアクスル軸回転手段として、一対のプーリ24、25・ベルト26と傘歯車21を用いるものについて説明したが、図示はしないが、例えば、オフセットアーム4先端にオフセットアーム4の長手方向に直交する水平方向の軸回りに回転可能な一対の方向変換プーリを配置し、支軸3に固定したプーリとこれらのプーリとアクスル軸7とにコグベルト等を巻掛けて構成することもでき、また、アクスル軸7と支軸3とが交差する部分に互いに1:1のギヤ比で噛合う交差ヘリカルギヤを配置するものであってもよい。
【0040】
また、上記実施形態において、走行駆動ユニット2として、アクスル軸7と支軸3とがオフセットアーム4によりオフセットした状態で交差するものについて説明したが、図示はしないが、オフセットがなく直接交差するものであってもよい。
【0041】
また、上記実施形態において、無人搬送車1として、四隅に走行駆動ユニット2を旋回可能に配列したものについて説明したが、図示はしないが、前後に走行駆動ユニットを旋回可能に配列し、四隅にキャスタ輪を配列したり、中央部に走行駆動ユニットを旋回可能に配列し、四隅にキャスタ輪を配列するものであってもよい。
【0042】
本実施形態においては、以下に記載する効果を奏することができる。
【0043】
(ア)夫々駆動モータ8により独立して駆動される駆動輪11を両端に有するアクスル軸7を平面内で旋回させて車両の推進方向を変更可能な走行駆動ユニット2を備える無人搬送車1において、前記アクスル軸7をアクスル軸7自身の長手方向の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支持する支軸3と、前記アクスル軸7の前記支軸3回りの旋回の向きと量に応じて、前記アクスル軸7を長手方向に延びるそれ自身の軸回りに回転させるアクスル軸回転手段(21〜26)と、前記車両の車体上部構造に配置された制御手段から前記支軸3内を通して前記支軸3の先端から前記アクスル軸7のいずれか一方の軸端側に架渡し、アクスル軸7の軸端からアクスル軸7内を通って前記駆動モータ7および周辺機器10へ接続されるハーネス12と、を備える。
【0044】
即ち、アクスル軸7の支軸3回りの旋回の向きと量に応じて、アクスル軸回転手段(21〜26)によりアクスル軸7を長手方向に延びるそれ自身の軸回りに回転させることにより、車両の車体上部構造に配置された制御手段から前記支軸3内を通して支軸3の先端から前記アクスル軸7のいずれか一方の軸端側に架渡し、アクスル軸7の軸端からアクスル軸7内を通って駆動輪11の駆動モータ8へ接続されるハーネス12の先端側のアクスル軸7がハーネス12のねじれを解消する方向に常に回転されることとなり、ハーネス12のねじれを解消することができ、アクスル軸7を連続的に大きく旋回させても、ハーネス12が捩られて路面や台車の上部構造と干渉したり、駆動輪11に巻き込まれて断線することを防止できる。このため、アクスル軸7の旋回範囲を制限して無人搬送車や自走ロボットの方向変換機能を制限するという不具合も発生しない。また、アクスル軸7は両端に駆動モータ8により回転駆動される駆動輪11を備えているため、両駆動輪11を差動させることによりアクスル軸7を旋回させることができ、車両の進行方向を自在に変更することができる。
【0045】
(イ)アクスル軸回転手段(21〜26)として、支軸3に対するアクスル軸7の旋回に応じて上下方向軸回りに旋回方向とは逆方向に且つ旋回量に相当する角度を持って回転する回転部材は、例えば、支軸3に固定のプーリ25若しくは歯車を固定して配置する一方、回転部材としても同径のプーリ24若しくは歯車を固定して配置し、両者をベルト26若しくはアイドラ歯車により伝動可能に連結することにより構成でき、回転部材の回転を方向変換して水平方向軸回りの回転に変換(例えば、ギヤ比が1:1の傘歯車21若しくは傘形摩擦車により)してアクスル軸7に伝達する変換機構とにより構成することにより、走行駆動ユニット2による推進方向を連続的に変化させる場合においてもハーネス12のねじれを解消することができる。
【0046】
(ウ)走行駆動ユニット2は、前記支軸3に回転可能に配置されたオフセットアーム4の先端部にアクスル軸7をアクスル軸7自身の軸回りに回転可能に支持して備え、前記アクスル軸回転手段(21〜26)は、前記オフセットアーム4の先端部に前記支軸3と平行配置された軸回りに回転可能に配置され、オフセットアーム4の支軸3回りの旋回角度に応じて逆方向に且つ旋回量に相当する角度を持って回転駆動される回転部材24と、回転部材24と共に回転する傘歯車21Bとこの傘歯車21Bに噛合うようアクスル軸7に固定した傘歯車21Aとで構成した変換機構とを備えることにより、ハーネス12のねじれを発生させたり一時停止させることなく、瞬時に走行駆動ユニット2を旋回させて前後進、左右並進、旋回等のホロノミック(holonomic)全方向移動をさせてその推進方向を変更できる。
【0047】
(エ)アクスル軸7は、アクスル軸7に受持たされる駆動輪11の駆動反力によりそれ自身の軸回りに回転付勢されることにより前記変換機構および回転部材を経由して支軸3回りに旋回させる旋回モーメントを相殺する方向に、オフセットアーム4に対してアクスル軸7を平面内で傾斜させて配置していることにより、駆動輪11に対する駆動反力が変動する始動時、加速時、減速時等においても、駆動反力によるアクスル軸7の旋回が抑制され、推進方向に安定して走行させることができる。
【0048】
(オ)支軸3は、オフセットアーム4と支持連結されるアクスル軸7の中央部に対して駆動輪11の半径寸法だけアクスル軸7方向にオフセットされていることにより、駆動反力によるアクスル軸7の旋回が確実に相殺され、駆動輪11に対する駆動反力が変動する始動時、加速時、減速時等においても、推進方向が変化することがない。
【0049】
(カ)走行駆動ユニット2は、前記アクスル軸7の平面内での旋回角度θsを検出するステアリング角検出手段29と、アクスル軸7に対する左右の駆動モータ8の回転角度θ1、θ2を検出するモータエンコーダ10と、左右駆動モータ8の回転角度を制御する制御手段と、を備え、前記制御手段は、検出されたステアリング角度θsを左右いずれか一方の検出モータ回転角θ1に対して加算し、他方の検出モータ回転角θ2に対して減算して得られる夫々の実モータ回転角と、検出されたステアリング角度θsの角速度成分を一方の検出モータ回転角θ1の角速度成分に対して加算し、他方の検出モータ回転角θ2の角速度成分に対して減算して得られる夫々の実モータ回転角速度と、ステアリング角度θsの角速度成分とに基づいて走行駆動ユニット2の角度位置を推定し、前記推定した角度位置が目標角度位置指令となるように左右の駆動モータ8を夫々制御する。このため、目標角度位置指令E2による指令角度位置が変更された場合には、新たな指令角度位置となるよう左右の駆動モータ8が夫々差動制御されて走行駆動ユニット2のステアリング角度θsがアクスル軸7の長手方向の軸回りの回転を織込みつつ制御される。また、目標角度位置指令E2による指令角度位置を維持しつつ走行させる場合であっても、路面からの外乱等によりその進行方向に乱れが生じる可能性がある場合であっても、アクスル軸7の長手方向の軸回りの回転を織込みつつその進行方向が乱されることなく走行させることができる。
【産業上の利用可能性】
【0050】
本発明は、無人搬送車を対象とする実施形態について説明したが、走行駆動ユニットにより様々な方向へ水平移動する移動ロボットにも適用できる。
【図面の簡単な説明】
【0051】
【図1】本発明の一実施形態を示す無人搬送車の走行駆動ユニットのレイアウトを示す平面図。
【図2】同じく走行駆動ユニットの概略構成図。
【図3】図1のA−A断面に沿う走行駆動ユニットの詳細を示す断面図。
【図4】図1のB−B断面に沿う走行駆動ユニットの詳細を示す断面図。
【図5】走行駆動ユニットの方向変更の制御を説明する概略図。
【図6】走行駆動ユニットの方向変更の制御を説明する制御ブロック図。
【図7】走行駆動ユニットの走行反力支持機構の作用を説明する説明図。
【図8】比較例の走行駆動ユニットの走行反力支持機構の作用を説明する説明図。
【図9】本実施形態の走行反力支持機構のベクトル構成を説明する図。
【符号の説明】
【0052】
1 無人搬送車
2 走行駆動ユニット
3 支軸
4 オフセットアーム
5 アーム
6 縦軸
7 アクスル軸
8 駆動モータ
9 減速機構
10 モータエンコーダ
11 駆動輪
12 ハーネス
【技術分野】
【0001】
本発明は、走行駆動ユニットによる駆動方向を変更することで車両の向きを変更することなく進路を変更可能な無人搬送車に関し、特に、方向変換可能な走行駆動ユニットと車両上部構造とに跨って配置される電力供給用および信号用のハーネスのねじれを解消に好適な無人搬送車に関するものである。
【背景技術】
【0002】
従来から磁気テープが交差する分岐路等において無人搬送車の向きを変更することなく車輪の向きを分岐方向に切換えて分岐走行可能な無人搬送車が提案されている(特許文献1参照)。
【0003】
これは、床面に敷設した軌道に沿って走行する無軌条式無人搬送車であり、台車フレームの中央に縦支軸および旋回ブラケットを介在させて左右一対の駆動輪を旋回可能に配置して備えると共に、その前後にキャスタ輪を備える無軌条式無人搬送車であり、台車フレームを前後走行の姿勢に固定のまま、左右一対の駆動輪を縦支軸および旋回ブラケットにより台車フレームの中心の回りに旋回操作して駆動輪の向きを前後走行と横行走行に切換えることができるようにしている。
【特許文献1】特開平5−270396号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
ところで、上記従来例のように、下部構造に縦支軸および旋回ブラケットを介在させて左右一対の駆動輪を旋回可能に配置して備える無人搬送車や自走ロボットにおいては、バッテリや制御装置が上部構造に配置されているため、駆動輪の駆動モータへ電力を供給する電力線や駆動輪の回転を検出するセンサへの信号線等のハーネス類を旋回する下部構造と上部構造との間で配線する必要がある。このハーネス類は下部構造の旋回時に捻られるため、路面や台車の上部構造と干渉したり、場合によっては駆動輪に巻き込まれて断線する虞があった。特に、大きく下部構造を旋回させた場合には上記不具合が顕著となる。このハーネス類のねじれを解消するために、下部構造の旋回範囲を制限することも考えられるが、その場合には、無人搬送車や自走ロボットの方向変換機能に制限が発生するという不具合を生ずる。
【0005】
そこで本発明は、上記問題点に鑑みてなされたもので、車両の上下構造間に配置されるハーネス類のねじれ解消に好適な無人搬送車を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、夫々駆動モータにより独立して駆動される駆動輪を両端に備えるアクスル軸を平面内で旋回させて車両の推進方向を変更可能な走行駆動ユニットを備える無人搬送車において、前記アクスル軸をアクスル軸自身の長手方向の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支持する支軸と、前記アクスル軸の前記支軸回りの旋回の向きと量に応じて、前記アクスル軸を長手方向に延びるそれ自身の軸回りに回転させるアクスル軸回転手段と、前記車両の車体上部構造に配置された制御手段から前記支軸内を通して前記支軸の先端から前記アクスル軸のいずれか一方の軸端側に架渡し、アクスル軸の軸端からアクスル軸内を通って前記駆動モータおよび周辺機器へ接続されるハーネスと、を備えるようにした。
【発明の効果】
【0007】
したがって、本発明では、アクスル軸をアクスル軸自身の長手方向の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支軸に支持させ、アクスル軸の支軸回りの旋回の向きと量に応じて、アクスル軸回転手段によりアクスル軸を長手方向に延びるそれ自身の軸回りに回転させることにより、車両の車体上部構造に配置された制御手段から前記支軸内を通して支軸の先端から前記アクスル軸のいずれか一方の軸端側に架渡し、アクスル軸の軸端からアクスル軸内を通って駆動輪の駆動モータへ接続される電力供給線の先端側のアクスル軸がハーネスのねじれを解消する方向に常に回転されることとなり、ハーネスのねじれを解消することができ、アクスル軸を連続的に大きく旋回させても、ハーネスが捩られて路面や台車の上部構造と干渉したり、駆動輪に巻き込まれて断線することを防止できる。このため、アクスル軸の旋回範囲を制限して無人搬送車や自走ロボットの方向変換機能を制限するという不具合も発生しない。
【発明を実施するための最良の形態】
【0008】
以下、本発明の無人搬送車を図1〜図8に示す一実施形態に基づいて説明する。図1は無人搬送車の走行駆動ユニットのレイアウトを示す平面図、図2は走行駆動ユニットの概略構成図、図3および図4は走行駆動ユニットの詳細を示す断面図、図5および図6は走行駆動ユニットの方向変更の制御を説明する概略図および制御ブロック図、図7および図8は本実施形態および比較例の走行駆動ユニットの走行反力支持機構の作用を説明する説明図、図9は本実施形態の走行反力支持機構のベクトル構成を説明する図である。
【0009】
図1において、本実施形態における無人搬送車1は、上部構造を構成する車体1Aの下部の夫々の隅に位置させて四組の走行駆動ユニット2を備える。この走行駆動ユニット2は、図2に示すように、車体1Aから床面に向けて立設させて固定された支軸3と、支軸3に旋回可能に支持されたアーム5と、その先端から下方に突出させて縦軸6を備えるオフセットアーム4と、オフセットアーム4の縦軸6に直交する横方向に配置され且つ長手方向の延びる軸心回りに回動可能にその長手方向中央部が縦軸6に軸支されるアクスル軸7と、アクスル軸7の両端部に配置され、駆動モータ8、減速機9および駆動モータ8のモータエンコーダ10を内蔵し、内蔵する駆動モータ8からの駆動力により減速機9を介して駆動される駆動輪11と、を備える。
【0010】
前記オフセットアーム4とアクスル軸7とは、図1に示すように、平面図上で一体となって旋回可能となっている。前記左右の駆動モータ8への電力線および各モータエンコーダ10よりの信号線等のハーネス12は、前記アクスル軸7の軸端から前記支軸3の軸端間に差渡した図示しないハーネスプロテクタ内および支軸3内を経由して上部構造に配置される図示しないコントローラおよびバッテリに接続されている。
【0011】
また、走行駆動ユニット2は、前記アクスル軸7に固定された傘歯車21Aと、前記オフセットアーム4の縦軸6回りに回転可能に配置した傘歯車21Bとがギヤ比を「1」として噛合わされている。そして、前記縦軸6回りに回転可能に設けた傘歯車21Bに連結された中空軸部23に一体に固定したプーリ24と前記支軸3に固定したプーリ25とにベルト26を巻掛けて1:1のプーリ比で連結されている。これら傘歯車21A、21Bおよびプーリ巻掛け部24〜26はアクスル軸回転機構を構成している。なお、前記アクスル軸7とオフセットアーム4の縦軸6回りに回転可能に配置した中空軸部23とは、傘歯車21A、21Bを介して回転を伝達するものについて説明したが、図示しないが、両者が1:1で回転伝導するものであれば、他の手段を用いるものであってもよい。また、中空軸部23と支軸3とは、プーリ24、25および巻掛けベルト26を用いて回転を伝達するものについて説明したが、中空軸部23と支軸3とに夫々歯車を固定し、これらの歯車同士をアイドラギヤを介して噛合わせるものであってもよい。
【0012】
図3に示す走行駆動ユニット2の断面図は、図1におけるA−A線に沿う支軸の中心を含む断面図である。図3に示すように、支軸3は中空状に構成されて車体1Aに固定されており、オフセットアーム4のアーム部5を一対のベアリング4Aを介して旋回可能に支持しており、その先端にプーリ25を回転しないように固定して備える。前記支軸3の中空穴内には、上部構造に配置される、図示しないコントローラおよびバッテリに繋がる電力線や信号線等のハーネス12が挿通され、下方の開口端からハーネスプロテクタ12A内を通り、アクスル軸7の軸端からアクスル軸7内に入り、各駆動輪11の内部に配置される前記モータ8およびモータエンコーダ10へ電気的に接続される。
【0013】
前記走行駆動ユニット2の支軸3回りの旋回は、オフセットアーム4の支軸3側端にプーリ27を一体に固定し、このプーリ27に巻掛けたベルト28の他端側をステアリングエンコーダ29の検出プーリ30に巻掛けることにより、ステアリングエンコーダ29により検出することができ、検出された旋回角信号はコントローラに出力される。
【0014】
図4に示す走行駆動ユニット2の断面図は、図1におけるB−B線に沿う縦軸6およびアクスル軸7の中心を含む断面図である。図4に示すように、オフセットアーム4の縦軸6は、アクスル軸7の中央部を軸受を介して回転可能に支持する下部軸6Aと下部軸6Aにピン13を介して連結された上部軸6Bとを備える。上部軸6Bは軸方向上部6B1と下部6B2とに分割されると共に入れ子式に組み合わされ、内部に挿入されたサスペンションスプリング14により伸長付勢されて形成されている。サスペンションスプリング14は、駆動輪11による走行中に駆動輪11が床面の凹凸等により上下動される際の衝撃吸収を行う。縦軸6の分割された上部軸6Bには、プーリ24を一体に備えた中空軸23を軸受を介して回転自在に支持している。また、縦軸6のピン13を介して連結された下部軸6Aには、中空状に形成した傘歯車21Bを軸受を介して回転可能に支持している。この傘歯車21Bと前記プーリ24を備える中空軸23とはフレキシブルベローズ22を介して連結され、両者の軸方向の相対移動を許容するも回転方向には一体となって回転するように構成している。前記傘歯車21Bは、アクスル軸7に固定された傘歯車21Aと1:1で噛合うよう構成している。
【0015】
また、前記駆動輪11の内部には、詳細な機構の図示を省略するが、駆動モータ8のステータが内周に配置されてアクスル軸7に固定され、外周部において減速ギヤ9へ駆動力を出力可能に回転子が配置されて構成される。なお、駆動モータ8は前記した構造に限定されるものではないが、出力部からの駆動反力がアクスル軸7に受持たれるものであればよい。また、減速ギヤ9はモータ8から出力された駆動力を減速して駆動輪11に回転駆動力として伝達する。減速ギヤ9は駆動輪11内のアクスル軸7回りに配置される駆動モータ8が占める空間を除く環状空間内に配置されるものであるため、遊星歯車機構による減速ギヤ9を用いることが望ましい。駆動モータ8の回転はモータエンコーダ10により検出されてコントローラにフィードバックされる。
【0016】
以上の構成のアクスル軸回転機構では、後述するステアリング動作に応じて支軸3回りにアクスル軸7およびオフセットアーム4が旋回する場合に、縦軸6に回転自在に支持しているプーリ24と支軸3に固定のプーリ25とにベルト26が巻掛けられているため、支軸3回りの公転のみが許容され、中空軸23および傘歯車21Bも同様に公転する(中空軸23の向きが予めセットした方向にのみ向き、旋回によっても向きが変化しない)。即ち、中空軸23はオフセットアーム4が旋回する方向に対して逆方向に回転されて、支軸3に対する中空軸23の相対回転差を戻す方向に回転される。そして、オフセットアーム4が支軸3回りに一周した際に、中空軸23が支軸3に対しての相対回転を戻す方向に丁度一回転する割合で回転される。この中空軸23の回転は傘歯車21A、21B同士の噛合いにより、アクスル軸7に伝達されて、アクスル軸7はオフセットアーム4が支軸3回りに一周した際に、同様にねじれとは反対側に丁度1回転されることとなる。したがって、支軸3とアクスル軸7とをハーネス類12を収容して連結するハーネスプロテクタ12Aも、両端が相対的な回転差を生じないこととなるため、両者に同期して回転し、ねじりが生ずることが防止される。
【0017】
前記走行駆動ユニット2による車両の駆動方向は、前記両駆動輪11が夫々駆動モータ8により互いに等速で駆動される場合には、アクスル軸7は支軸回りに旋回することなく、アクスル軸7と直交する方向(駆動方向)に、アクスル軸7を介して支軸3を押し、車両を移動させる。この場合には、両駆動輪11の駆動方向の合成力が一致される。また、前記両駆動輪11の平均速度が零となる場合、即ち、両駆動輪11が互いに反対方向に等速で駆動される場合には、支軸3回りにアクスル軸7およびオフセットアーム4を回動させて、支軸3への駆動方向を変更(操舵操作、ステアリング操作)することができる。なお、左右駆動輪11の駆動速度に差を持たせた場合には、支軸3回りにアクスル軸7およびオセットアーム4を回動させつつ両駆動輪11の平均速度に応じて支軸3を押動して車両を走行させることもできる。
【0018】
図5は走行駆動ユニット2に設けられている回転検出センサ10、29による検出要領を示しており、各矢印で示す方向を夫々正とし、矢印と反対の方向を負としている。また、図6は走行駆動ユニット2の操舵操作の制御ブロックを示すものである。以下、本実施形態の無人搬送車1における走行駆動ユニット2の操舵操作について、図6に示す制御ブロックに基づいて説明する。
【0019】
前記駆動モータ8の回転角θ1、θ2は各モータエンコーダ10により検出され、オフセットアーム4の旋回角θsはステアリングエンコーダ29により検出される。各駆動モータ8の回転角θ1、θ2は、オフセットアーム4の旋回に起因するアクスル軸7自体のアクスル軸7回りの回転成分θsを含んでいるために、ブロックB1、B2において、アクスル軸7の軸回りの回転成分θsの加算補正および減算補正が実行されて、各々の実回転角が演算される。また、ブロックC1、C2、Csにより各モータ8の角速度(dθ1/dt、dθ2/dt)およびオフセットアーム4によるステアリング角速度(dθs/dt)が演算され、ブロックD1、D2において、アクスル軸7の軸回りの角速度成分(dθs/dt)の加算補正および減算補正が実行されて、各々の実角速度が演算される。そして、ブロックE1において、ブロックB1、B2、D1、D2の演算結果に基づいて、走行駆動ユニット2の角度位置が常に推定される。
【0020】
したがって、ブロックE2による目標角度位置指令(例えば、車両直進時を基準として、左操舵方向を正、右操舵方向を負とする角度信号)が与えられると、ブロックE3において、目標角度位置指令とブロックE1よりの角度位置推定値との差分が演算され、その差分に応じて各駆動モータ8が駆動され、目標角度位置指令に角度位置推定値が到達するよう制御される。
【0021】
したがって、目標角度位置指令E2による指令角度位置が変更された場合には、新たな指令角度位置となるよう左右の駆動モータ8が夫々差動制御されて走行駆動ユニット2のステアリング角度がアクスル軸7の長手方向の軸回りの回転を織込みつつ制御される。また、目標角度位置指令E2による指令角度位置を維持しつつ走行させる場合であっても、路面からの外乱等によりその進行方向に乱れが生じる可能性がある場合であっても、アクスル軸7の長手方向の軸回りの回転を織込みつつその進行方向を維持させることができる。
【0022】
車両の進行方向は、車両の4隅に配置されている各走行駆動ユニット2の夫々の駆動方向に応じて様々に変化させることができる。
【0023】
車両を真っ直ぐに進ませる場合には、これらの走行駆動ユニット2を全て同じ方向(車両の前方、後方、横方向、斜め方向等)に操舵させて各駆動輪11を同一方向に同一速度で駆動することにより車両を姿勢(向き)を変化させることなく、その方向に真っ直ぐに走行させることができる。図1に実線で示す状態は、車両を前進走行させる場合を示し、破線で示す状態は車両をその姿勢を変化させることなく横方向に走行させる場合を示している。
【0024】
車両を旋回させる場合には、夫々のアクスル軸7の延長線が旋回させようとする中心(旋回中心)で交差するよう夫々の走行駆動ユニット2の操舵角(例えば、大回りであれば前左右の走行駆動ユニット2のみを操舵、小回りであれば前後左右の走行駆動ユニット2を操舵)を演算し、角操舵角となるよう夫々の駆動輪11の駆動速度を制御することで、車両を旋回させることができる。
【0025】
また、車両をその場旋回させる場合には、車両中心を旋回中心とするよう夫々の走行駆動ユニット2の操舵角度位置を演算し、夫々の走行駆動ユニット2を必要とする操舵角度に制御して、各走行駆動ユニット2の各駆動輪11を夫々等速で駆動することにより、車両をその場旋回させることができる。
【0026】
そして、本実施形態の無人搬送車1においては、図1に示すように、車両左右の走行駆動ユニット2間では、左側の前後の走行駆動ユニット2においては、アクスル軸7に配置する傘歯車21Aが右側(車両左右方向の中央側)に配置され、支軸3に連なるハーネス類12のハーネスプロテクタ12Aのアクスル軸7への接続口も右側(車両左右方向の中央側)に配置されている。他方、右側の前後の走行駆動ユニット2においては、アクスル軸7に配置する傘歯車21Aが左側(車両左右方向の中央側)に配置され、支軸3に連なるハーネス類12のハーネスプロテクタ12Aのアクスル軸7への接続口も左側(車両左右方向の中央側)に配置されている。即ち、車両の左右の走行駆動ユニット2は、左右で対称に配置されている。
【0027】
オフセットアーム4の旋回に伴うアクスル軸7の軸回りの回転は、左側の走行駆動ユニット2では車両中央側である右側にアクスル軸7側の傘歯車21Aが配列されているのに対し、右側走行駆動ユニット2では車両中央側である左側にアクスル軸7側の傘歯車21Aが配列されていることにより、左右の走行駆動ユニット2で反対方向とすることができ、この結果、夫々のアクスル軸7の車両中央側端面より支軸に連なるハーネス類12のハーネスプロテクタ12Aを接続することができる。
【0028】
ところで、本実施形態の無人搬送車1においては、平面図示状態において、アクスル軸7に対してオフセットアーム4を直交させることなくアクスル軸7に配置されている傘歯車21Aがある側に傾斜させて配置され、縦軸6の軸心に対して支軸3の軸心が距離S2だけアクスル軸7方向にオフセットさせて配置している。
【0029】
即ち、車両左右の走行駆動ユニット2間では、左側の前後の走行駆動ユニット2においては、アクスル軸7に対して支軸3が右側(車両左右方向の中央側)にオフセットされ、右側の前後の走行駆動ユニット2においては、アクスル軸7に対して支軸3が左側(車両左右方向の中央側)にオフセットされている。
【0030】
図7は車両の左前の走行駆動ユニット2を抜出して示すものであり、図8はオフセットアーム4がアクスル軸7に対して直角にレイアウトされた比較例を示している。図7および図8に示す走行駆動ユニット2の駆動輪11に夫々駆動モータ8により前進方向Cの駆動力を加えた場合、アクスル軸7には駆動輪11の駆動力に対する反力が加わる。この反力は駆動力とは反対方向(図中矢印D方向)にアクスル軸7を回転させる方向に作用し、この作用力は傘歯車21A、21B同士の噛合いにより中空軸23に伝達され、プーリ24を回転させるよう作用する(矢印E参照)。このプーリ24に加わる回転力は、ベルト26の一方(図示例では、右側)の張力を増大させる一方、他方(左側)の張力を低下させる。このベルト張力のアンバランスによりオフセットアーム4を矢印Fの方向(ここでは、反時計方向)に旋回させようとするモーメントが生ずる。
【0031】
図8に示す比較例では、前記オフセットアーム4の旋回モーメントを打消す作用力はないため、オフセットアーム4が、支軸3を中心として図中反時計方向に回動して、走行駆動ユニット2の進行方向を左前方に変化させ、車両の進路が矢印G方向に変化することとなる。
【0032】
しかしながら、本実施形態である図7に示す走行駆動ユニット2においては、支軸3と縦軸6とが横方向にオフセットS2されているため、駆動輪11の駆動力が作用してアクスル軸7が支軸3側に押圧される(左右駆動輪11が路面に作用する駆動力と同等の前進方向の力となる)と、この前進力にオフセットS2を乗算した矢印H方向の駆動によるモーメントが発生する。この駆動によるモーメントHは、前記オフセットアーム4の旋回モーメントFとは逆方向であり、両者が互いに相殺して、オフセットアーム4は旋回される作用は生ぜず、走行駆動ユニット2の進行方向は車両前進方向Jに維持される。ここでは、代表的に車両の左前の走行駆動ユニット2について説明したが、他の走行駆動ユニット2、例えば、右前の走行駆動ユニット2においても、各モーメントの方向が逆となるが、同様に作用し、車両の進行方向を前進方向に維持する。
【0033】
図9は、走行駆動ユニット2(右側の走行駆動ユニット2)の略図であり、支軸3のオフセットS2の設定方法について、以下に説明する。ここでは、駆動輪11の半径を「r」、両駆動輪11の中心点は「O1」、中心点から駆動輪11の接地点の距離を「d」、二つのオフセットをそれぞれ「S1、S2」、支軸3を「O2」としている。駆動輪11から路面に加える推進力を「f」としている。
【0034】
走行駆動ユニット2は、図6に示すように左右駆動輪11が制御されたアクティブ駆動され、左右駆動輪11のトルクのバランスは取れた理想状態と想定して、両駆動輪11に同じ制御指令を出す場合、同じ速度Vで回転し、走行駆動ユニット2はVで直進する。駆動輪11の出力トルクM1は、M1=f・rである。
【0035】
駆動輪11の推進力fによる支軸O2に対する回転モーメントN2は、N2=f(d+S2)−f(d−S2)=2f・S2と表わすことができ、この回転モーメントN2は、この走行駆動ユニット2においては時計回りする傾向がある。
【0036】
一方、駆動輪11の出力トルクに対する反トルクM’1はアクスル軸7を軸回りに回転させるよう作用し、傘歯車21、中空軸23を経由して中空軸23に固定のプーリ24に作用し、ベルト26を介して支軸3に回転モーメントN1として作用する。
【0037】
支軸O2に対する回転モーメントN1は、N1=2M’1=2(f・r)であり(注:二つの駆動輪11によるトルクであるため2倍している)、この回転モーメントN1は、この走行駆動ユニット2においては反時計回りする傾向がある。
【0038】
前記回転モーメントN1と回転モーメントN2を釣り合わせて相殺するためには、N1=N2、即ち、2f・r=2f・S2と設定する必要がある。したがって、オフセットS2=駆動輪半径rとすることで、両者は相殺することができる。
【0039】
なお、上記実施形態において、アクスル軸7の前記支軸3回りの旋回に応じて、前記アクスル軸7を長手方向に延びるそれ自身の軸回りに前記旋回量と同一角度だけ回転させるアクスル軸回転手段として、一対のプーリ24、25・ベルト26と傘歯車21を用いるものについて説明したが、図示はしないが、例えば、オフセットアーム4先端にオフセットアーム4の長手方向に直交する水平方向の軸回りに回転可能な一対の方向変換プーリを配置し、支軸3に固定したプーリとこれらのプーリとアクスル軸7とにコグベルト等を巻掛けて構成することもでき、また、アクスル軸7と支軸3とが交差する部分に互いに1:1のギヤ比で噛合う交差ヘリカルギヤを配置するものであってもよい。
【0040】
また、上記実施形態において、走行駆動ユニット2として、アクスル軸7と支軸3とがオフセットアーム4によりオフセットした状態で交差するものについて説明したが、図示はしないが、オフセットがなく直接交差するものであってもよい。
【0041】
また、上記実施形態において、無人搬送車1として、四隅に走行駆動ユニット2を旋回可能に配列したものについて説明したが、図示はしないが、前後に走行駆動ユニットを旋回可能に配列し、四隅にキャスタ輪を配列したり、中央部に走行駆動ユニットを旋回可能に配列し、四隅にキャスタ輪を配列するものであってもよい。
【0042】
本実施形態においては、以下に記載する効果を奏することができる。
【0043】
(ア)夫々駆動モータ8により独立して駆動される駆動輪11を両端に有するアクスル軸7を平面内で旋回させて車両の推進方向を変更可能な走行駆動ユニット2を備える無人搬送車1において、前記アクスル軸7をアクスル軸7自身の長手方向の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支持する支軸3と、前記アクスル軸7の前記支軸3回りの旋回の向きと量に応じて、前記アクスル軸7を長手方向に延びるそれ自身の軸回りに回転させるアクスル軸回転手段(21〜26)と、前記車両の車体上部構造に配置された制御手段から前記支軸3内を通して前記支軸3の先端から前記アクスル軸7のいずれか一方の軸端側に架渡し、アクスル軸7の軸端からアクスル軸7内を通って前記駆動モータ7および周辺機器10へ接続されるハーネス12と、を備える。
【0044】
即ち、アクスル軸7の支軸3回りの旋回の向きと量に応じて、アクスル軸回転手段(21〜26)によりアクスル軸7を長手方向に延びるそれ自身の軸回りに回転させることにより、車両の車体上部構造に配置された制御手段から前記支軸3内を通して支軸3の先端から前記アクスル軸7のいずれか一方の軸端側に架渡し、アクスル軸7の軸端からアクスル軸7内を通って駆動輪11の駆動モータ8へ接続されるハーネス12の先端側のアクスル軸7がハーネス12のねじれを解消する方向に常に回転されることとなり、ハーネス12のねじれを解消することができ、アクスル軸7を連続的に大きく旋回させても、ハーネス12が捩られて路面や台車の上部構造と干渉したり、駆動輪11に巻き込まれて断線することを防止できる。このため、アクスル軸7の旋回範囲を制限して無人搬送車や自走ロボットの方向変換機能を制限するという不具合も発生しない。また、アクスル軸7は両端に駆動モータ8により回転駆動される駆動輪11を備えているため、両駆動輪11を差動させることによりアクスル軸7を旋回させることができ、車両の進行方向を自在に変更することができる。
【0045】
(イ)アクスル軸回転手段(21〜26)として、支軸3に対するアクスル軸7の旋回に応じて上下方向軸回りに旋回方向とは逆方向に且つ旋回量に相当する角度を持って回転する回転部材は、例えば、支軸3に固定のプーリ25若しくは歯車を固定して配置する一方、回転部材としても同径のプーリ24若しくは歯車を固定して配置し、両者をベルト26若しくはアイドラ歯車により伝動可能に連結することにより構成でき、回転部材の回転を方向変換して水平方向軸回りの回転に変換(例えば、ギヤ比が1:1の傘歯車21若しくは傘形摩擦車により)してアクスル軸7に伝達する変換機構とにより構成することにより、走行駆動ユニット2による推進方向を連続的に変化させる場合においてもハーネス12のねじれを解消することができる。
【0046】
(ウ)走行駆動ユニット2は、前記支軸3に回転可能に配置されたオフセットアーム4の先端部にアクスル軸7をアクスル軸7自身の軸回りに回転可能に支持して備え、前記アクスル軸回転手段(21〜26)は、前記オフセットアーム4の先端部に前記支軸3と平行配置された軸回りに回転可能に配置され、オフセットアーム4の支軸3回りの旋回角度に応じて逆方向に且つ旋回量に相当する角度を持って回転駆動される回転部材24と、回転部材24と共に回転する傘歯車21Bとこの傘歯車21Bに噛合うようアクスル軸7に固定した傘歯車21Aとで構成した変換機構とを備えることにより、ハーネス12のねじれを発生させたり一時停止させることなく、瞬時に走行駆動ユニット2を旋回させて前後進、左右並進、旋回等のホロノミック(holonomic)全方向移動をさせてその推進方向を変更できる。
【0047】
(エ)アクスル軸7は、アクスル軸7に受持たされる駆動輪11の駆動反力によりそれ自身の軸回りに回転付勢されることにより前記変換機構および回転部材を経由して支軸3回りに旋回させる旋回モーメントを相殺する方向に、オフセットアーム4に対してアクスル軸7を平面内で傾斜させて配置していることにより、駆動輪11に対する駆動反力が変動する始動時、加速時、減速時等においても、駆動反力によるアクスル軸7の旋回が抑制され、推進方向に安定して走行させることができる。
【0048】
(オ)支軸3は、オフセットアーム4と支持連結されるアクスル軸7の中央部に対して駆動輪11の半径寸法だけアクスル軸7方向にオフセットされていることにより、駆動反力によるアクスル軸7の旋回が確実に相殺され、駆動輪11に対する駆動反力が変動する始動時、加速時、減速時等においても、推進方向が変化することがない。
【0049】
(カ)走行駆動ユニット2は、前記アクスル軸7の平面内での旋回角度θsを検出するステアリング角検出手段29と、アクスル軸7に対する左右の駆動モータ8の回転角度θ1、θ2を検出するモータエンコーダ10と、左右駆動モータ8の回転角度を制御する制御手段と、を備え、前記制御手段は、検出されたステアリング角度θsを左右いずれか一方の検出モータ回転角θ1に対して加算し、他方の検出モータ回転角θ2に対して減算して得られる夫々の実モータ回転角と、検出されたステアリング角度θsの角速度成分を一方の検出モータ回転角θ1の角速度成分に対して加算し、他方の検出モータ回転角θ2の角速度成分に対して減算して得られる夫々の実モータ回転角速度と、ステアリング角度θsの角速度成分とに基づいて走行駆動ユニット2の角度位置を推定し、前記推定した角度位置が目標角度位置指令となるように左右の駆動モータ8を夫々制御する。このため、目標角度位置指令E2による指令角度位置が変更された場合には、新たな指令角度位置となるよう左右の駆動モータ8が夫々差動制御されて走行駆動ユニット2のステアリング角度θsがアクスル軸7の長手方向の軸回りの回転を織込みつつ制御される。また、目標角度位置指令E2による指令角度位置を維持しつつ走行させる場合であっても、路面からの外乱等によりその進行方向に乱れが生じる可能性がある場合であっても、アクスル軸7の長手方向の軸回りの回転を織込みつつその進行方向が乱されることなく走行させることができる。
【産業上の利用可能性】
【0050】
本発明は、無人搬送車を対象とする実施形態について説明したが、走行駆動ユニットにより様々な方向へ水平移動する移動ロボットにも適用できる。
【図面の簡単な説明】
【0051】
【図1】本発明の一実施形態を示す無人搬送車の走行駆動ユニットのレイアウトを示す平面図。
【図2】同じく走行駆動ユニットの概略構成図。
【図3】図1のA−A断面に沿う走行駆動ユニットの詳細を示す断面図。
【図4】図1のB−B断面に沿う走行駆動ユニットの詳細を示す断面図。
【図5】走行駆動ユニットの方向変更の制御を説明する概略図。
【図6】走行駆動ユニットの方向変更の制御を説明する制御ブロック図。
【図7】走行駆動ユニットの走行反力支持機構の作用を説明する説明図。
【図8】比較例の走行駆動ユニットの走行反力支持機構の作用を説明する説明図。
【図9】本実施形態の走行反力支持機構のベクトル構成を説明する図。
【符号の説明】
【0052】
1 無人搬送車
2 走行駆動ユニット
3 支軸
4 オフセットアーム
5 アーム
6 縦軸
7 アクスル軸
8 駆動モータ
9 減速機構
10 モータエンコーダ
11 駆動輪
12 ハーネス
【特許請求の範囲】
【請求項1】
夫々駆動モータにより独立して駆動される駆動輪を両端に有するアクスル軸を平面内で旋回させて車両の推進方向を変更可能な走行駆動ユニットを備える無人搬送車において、
前記アクスル軸をアクスル軸自身の長手方向の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支持する支軸と、
前記アクスル軸の前記支軸回りの旋回の向きと量に応じて、前記アクスル軸を長手方向に延びるそれ自身の軸回りに回転させるアクスル軸回転手段と、
前記車両の車体上部構造に配置された制御手段から前記支軸内を通して前記支軸の先端から前記アクスル軸のいずれか一方の軸端側に架渡し、アクスル軸の軸端からアクスル軸内を通って前記駆動モータおよび周辺機器へ接続されるハーネスと、を備えることを特徴とする無人搬送車。
【請求項2】
前記アクスル軸回転手段は、支軸に対するアクスル軸の旋回に応じて上下方向軸回りに前記旋回方向とは逆方向に且つ旋回量に相当する角度を持って回転する回転部材と、回転部材の回転を方向変換して水平方向軸回りの回転に変換してアクスル軸に伝達する変換機構とにより構成されることを特徴とする請求項1に記載の無人搬送車。
【請求項3】
前記走行駆動ユニットは、前記一対の駆動モータを差動させることによりアクスル軸を平面内で旋回させて車両の進行方向を変更することを特徴とする請求項1または請求項2に記載の無人搬送車。
【請求項4】
前記走行駆動ユニットは、前記支軸に回転可能に配置されたオフセットアームの先端部にアクスル軸がアクスル軸自身の軸回りに回転可能に支持されており、
前記アクスル軸回転手段は、前記オフセットアームの先端部に前記支軸と平行配置された軸回りに回転可能に配置され、オフセットアームの支軸回りの旋回角度に応じて逆方向に且つ旋回量に相当する角度を持って回転駆動される回転部材と、回転部材と共に回転する傘歯車とこの傘歯車に噛合うようアクスル軸に固定した傘歯車とで構成した変換機構とを備えることを特徴とする請求項1から請求項3のいずれか一つに記載の無人搬送車。
【請求項5】
前記支軸はプーリ若しくは歯車を固定して備え、前記回転部材はプーリ若しくは歯車により構成され、支軸に設けたプーリ若しくは歯車は前記回転部材とベルト巻掛け若しくはアイドラ歯車により伝動可能に連結されていることを特徴とする請求項2から請求項4のいずれか一つに記載の無人搬送車。
【請求項6】
前記アクスル軸は、アクスル軸に受持たされる駆動輪の駆動反力によりそれ自身の軸回りに回転付勢されることにより前記変換機構および回転部材を経由して支軸回りに旋回させる旋回モーメントを相殺する方向に、前記オフセットアームに対してアクスル軸を平面内で傾斜させて配置していることを特徴とする請求項4または請求項5に記載の無人搬送車。
【請求項7】
前記支軸は、前記オフセットアームと支持連結されるアクスル軸の中央部に対して駆動輪の半径寸法だけアクスル軸方向にオフセットされていることを特徴とする請求項4から請求項6のいずれか一つに記載の無人搬送車。
【請求項8】
前記走行駆動ユニットは、前記アクスル軸の平面内での旋回角度を検出するステアリング角検出手段と、アクスル軸に対する左右の駆動モータの回転角度を検出するモータ回転角検出手段と、左右駆動モータの回転角度を制御する制御手段と、を備え、
前記制御手段は、検出されたステアリング角度を左右いずれか一方の検出モータ回転角に対して加算し、他方の検出モータ回転角に対して減算して得られる夫々の実モータ回転角と、検出されたステアリング角度の角速度成分を一方の検出モータ回転角の角速度成分に対して加算し、他方の検出モータ回転角の角速度成分に対して減算して得られる夫々の実モータ回転角速度と、ステアリング角度の角速度成分とに基づいて走行駆動ユニットの角度位置を推定し、前記推定した角度位置が目標角度位置指令となるように左右の駆動モータを夫々制御することを特徴とする請求項1から請求項7のいずれか一つに記載の無人搬送車。
【請求項1】
夫々駆動モータにより独立して駆動される駆動輪を両端に有するアクスル軸を平面内で旋回させて車両の推進方向を変更可能な走行駆動ユニットを備える無人搬送車において、
前記アクスル軸をアクスル軸自身の長手方向の軸回りに回転可能であり且つ平面内で旋回可能にその中央部を支持する支軸と、
前記アクスル軸の前記支軸回りの旋回の向きと量に応じて、前記アクスル軸を長手方向に延びるそれ自身の軸回りに回転させるアクスル軸回転手段と、
前記車両の車体上部構造に配置された制御手段から前記支軸内を通して前記支軸の先端から前記アクスル軸のいずれか一方の軸端側に架渡し、アクスル軸の軸端からアクスル軸内を通って前記駆動モータおよび周辺機器へ接続されるハーネスと、を備えることを特徴とする無人搬送車。
【請求項2】
前記アクスル軸回転手段は、支軸に対するアクスル軸の旋回に応じて上下方向軸回りに前記旋回方向とは逆方向に且つ旋回量に相当する角度を持って回転する回転部材と、回転部材の回転を方向変換して水平方向軸回りの回転に変換してアクスル軸に伝達する変換機構とにより構成されることを特徴とする請求項1に記載の無人搬送車。
【請求項3】
前記走行駆動ユニットは、前記一対の駆動モータを差動させることによりアクスル軸を平面内で旋回させて車両の進行方向を変更することを特徴とする請求項1または請求項2に記載の無人搬送車。
【請求項4】
前記走行駆動ユニットは、前記支軸に回転可能に配置されたオフセットアームの先端部にアクスル軸がアクスル軸自身の軸回りに回転可能に支持されており、
前記アクスル軸回転手段は、前記オフセットアームの先端部に前記支軸と平行配置された軸回りに回転可能に配置され、オフセットアームの支軸回りの旋回角度に応じて逆方向に且つ旋回量に相当する角度を持って回転駆動される回転部材と、回転部材と共に回転する傘歯車とこの傘歯車に噛合うようアクスル軸に固定した傘歯車とで構成した変換機構とを備えることを特徴とする請求項1から請求項3のいずれか一つに記載の無人搬送車。
【請求項5】
前記支軸はプーリ若しくは歯車を固定して備え、前記回転部材はプーリ若しくは歯車により構成され、支軸に設けたプーリ若しくは歯車は前記回転部材とベルト巻掛け若しくはアイドラ歯車により伝動可能に連結されていることを特徴とする請求項2から請求項4のいずれか一つに記載の無人搬送車。
【請求項6】
前記アクスル軸は、アクスル軸に受持たされる駆動輪の駆動反力によりそれ自身の軸回りに回転付勢されることにより前記変換機構および回転部材を経由して支軸回りに旋回させる旋回モーメントを相殺する方向に、前記オフセットアームに対してアクスル軸を平面内で傾斜させて配置していることを特徴とする請求項4または請求項5に記載の無人搬送車。
【請求項7】
前記支軸は、前記オフセットアームと支持連結されるアクスル軸の中央部に対して駆動輪の半径寸法だけアクスル軸方向にオフセットされていることを特徴とする請求項4から請求項6のいずれか一つに記載の無人搬送車。
【請求項8】
前記走行駆動ユニットは、前記アクスル軸の平面内での旋回角度を検出するステアリング角検出手段と、アクスル軸に対する左右の駆動モータの回転角度を検出するモータ回転角検出手段と、左右駆動モータの回転角度を制御する制御手段と、を備え、
前記制御手段は、検出されたステアリング角度を左右いずれか一方の検出モータ回転角に対して加算し、他方の検出モータ回転角に対して減算して得られる夫々の実モータ回転角と、検出されたステアリング角度の角速度成分を一方の検出モータ回転角の角速度成分に対して加算し、他方の検出モータ回転角の角速度成分に対して減算して得られる夫々の実モータ回転角速度と、ステアリング角度の角速度成分とに基づいて走行駆動ユニットの角度位置を推定し、前記推定した角度位置が目標角度位置指令となるように左右の駆動モータを夫々制御することを特徴とする請求項1から請求項7のいずれか一つに記載の無人搬送車。
【図7】


【図8】
【図9】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【図8】
【図9】
【図1】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−126709(P2008−126709A)
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願番号】特願2006−310661(P2006−310661)
【出願日】平成18年11月16日(2006.11.16)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【出願人】(000003997)日産自動車株式会社 (16,386)
【公開日】平成20年6月5日(2008.6.5)
【国際特許分類】
【出願日】平成18年11月16日(2006.11.16)
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【出願人】(000003997)日産自動車株式会社 (16,386)
[ Back to top ]