
無段変速機の制御装置
【課題】発進性のよい無段変速機の制御装置を提供する。
【解決手段】シフトレバー23がNレンジからDレンジへ変更され、所定の学習条件が成立した場合に、プライマリプーリ回転速度センサ23によってパルス信号が検出されるまでの学習タイマtm_pulseを算出し、学習タイマtm_pulseと基準補正量ΔP_offsetとの間における偏差が所定のしきい値Δt_pulse_difよりも大きい場合には、学習補正量P_offsetを更新する。
【解決手段】シフトレバー23がNレンジからDレンジへ変更され、所定の学習条件が成立した場合に、プライマリプーリ回転速度センサ23によってパルス信号が検出されるまでの学習タイマtm_pulseを算出し、学習タイマtm_pulseと基準補正量ΔP_offsetとの間における偏差が所定のしきい値Δt_pulse_difよりも大きい場合には、学習補正量P_offsetを更新する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は無段変速機の制御装置に関するものである。
【背景技術】
【0002】
従来、無断変速機において、発進時に運転者がシフトレバーをNレンジからDレンジ(またはRレンジ)に切り替えると、その動きを物理的な連動機構によりマニュアルバルブに伝達し、このマニュアルバルブをクラッチ元圧と前進クラッチのピストン油室とを連通する位置(またはクラッチ元圧と後退クラッチ(ブレーキ)のピストン油室とを連通する位置)に変位させることにより、前進クラッチ(または後退クラッチ)を締結してエンジントルクを無断変速機に伝達している。
【0003】
シフトレバーがNレンジからDレンジ(またはRレンジ)に切り替えられると、大きく分けて3つのフェーズを経て、前進クラッチ(または後退クラッチ)締結が完了する。3つのフェーズは、プリチャージフェーズと、締結進行フェーズと、最終締結フェーズである。プリチャージフェーズは、高い油圧指令値により油圧回路の充填及びクラッチの無効ストローク部分の解消を行う。締結進行フェーズは、プリチャージフェーズの後に油圧指令値を一旦所定値に低下させて、そこから所定増加率で、油圧指令値を上昇させる。最終締結フェーズは、締結進行フェーズの後に、油圧指令値を短時間でクラッチ締結時の最大値まで上昇させる。
【0004】
これらのフェーズについて、クラッチ油圧を油圧指令値によるオープン制御とする場合、クラッチの経時変化や、製品のバラツキ、作動油温などにより、出荷時にATCUのROMに標準で記憶設定されている油圧指令値の基準値(ノミナル値)のままでは、締結遅れを生じたり、逆に締結が早すぎて締結ショックを生じてしまうと、いった問題が生じる。
【0005】
このような問題を解決するものとして、特許文献1に記載されたものがある。これによると、NレンジからDレンジ(Rレンジ)に切り替えられた後、クラッチの入力側回転速度(タービン回転速度)が所定回転速度(停車時、0rpm)となるまでの時間を計測する。そして、締結までの時間が基準時間よりも長い場合には、ノミナル値に対して、油圧指令値を所定量増加するように、学習補正する。一方、締結までの時間が基準時間よりも短い場合には、ノミナル値に対して油圧指令値を所定量減少させるように学習補正する。
【特許文献1】特開平06−265004号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、上記の発明では、クラッチの入力側回転速度を検出するセンサが必要となる。そのため、このセンサを有していない場合には、学習補正を実現することができない、といった問題点がある。
【0007】
本発明はこのような問題点を解決するために発明されたもので、クラッチの入力側回転速度を検出するセンサを設けていない場合でも、学習補正を可能とし、クラッチの締結の遅れ、または、急激なクラッチの締結によって生じる締結ショックの発生を抑制することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、プライマリプーリとセカンダリプーリとに巻き掛けられ、溝幅に応じてプーリとの接触半径が変化するベルトを備えた無段変速機を制御する無段変速機の制御装置において、シフトレバー操作位置に応じた信号を出力するインヒビタスイッチと、インヒビタスイッチの出力信号及び車両の運転状態に基づいて、プライマリプーリとエンジンとの間に介装される前進クラッチまたは後退クラッチに供給する油圧を制御する油圧制御手段と、プライマリプーリの回転速度を検出するプライマリプーリ回転速度検出手段と、インヒビタスイッチの出力信号に基づいて、シフトレバー操作位置が、非走行位置から走行位置に切り替えられたことを判定した場合に、判定がされてから、プライマリプーリ回転速度検出手段によってパルス信号が出力されるまでの経過時間を算出する時間算出手段と、インヒビタスイッチの出力信号に基づいて、シフトレバー操作位置が、非走行位置から走行位置に切り替えられたことを判定した場合に、経過時間に基づいて、油圧補正量を学習する油圧補正量学習手段と、シフトレバー操作位置が、非走行位置から走行位置に切り替えられた場合に、オープン制御によって、前進クラッチまたは後退クラッチの一方に供給する油圧を、油圧補正量で補正する油圧補正手段と、を備える。そして、油圧制御手段は、シフトレバー操作位置が、非走行位置から走行位置に切り替えられた場合に、補正制御手段によって補正された油圧を前記前進クラッチまたは後進ブレーキに供給することを特徴とする。
【発明の効果】
【0009】
本発明によると、クラッチの入力側回転速度を検出するセンサを有していない場合でも、油圧補正量を学習することができ、前進クラッチ、または後退クラッチの締結を行う際に、クラッチの締結遅れ、または急激な締結による締結ショックを抑制することができる。
【発明を実施するための最良の形態】
【0010】
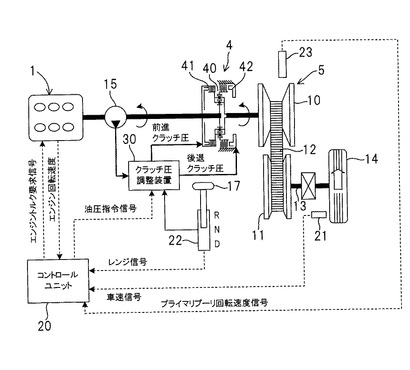
本発明の第1実施形態のパワートレインについて、図1の概略構成図を用いて説明する。
【0011】
図1において、パワートレインは、エンジン1に連結された前後進切り換え機構4と、前後進切り換え機構4の出力軸に連結された無段変速機5を主体に構成され、無段変速機5は、一対の可変プーリとして入力軸側のプライマリプーリ10と、出力軸13に連結されたセカンダリプーリ11とを備え、これら一対の可変プーリ10、11はVベルト(ベルト)12によって連結されている。なお、出力軸13はアイドラギアやディファレンシャルギアを介して駆動輪14に連結される。また、前後進切り換え機構4の入力側と、エンジン1との間には、トルクコンバータなどの発進要素(図示せず)が介装される。
【0012】
前後進切り換え機構4は、エンジン1側とプライマリプーリ10との動力伝達経路を切り換える遊星歯車40、前進クラッチ41及び後退クラッチ42から構成され、車両の前進時には前進クラッチ41を締結し、車両の後退時には後退クラッチ42を締結し、中立位置(ニュートラルやパーキング)では前進クラッチ41及び後退クラッチ42を共に解放する。
【0013】
これら前進クラッチ41、後退クラッチ42は、コントロールユニット20からの指令に応じて前進クラッチ41と後退クラッチ42に所定油圧の作動油を供給するクラッチ圧調整装置(油圧制御手段)30によって締結状態の制御が行われる。
【0014】
なお、クラッチ圧調整装置30は、油圧ポンプ15からの油圧を元圧として前進クラッチ41及び後退クラッチ42への供給油圧を調整する。また、油圧ポンプ15は、前後進切り換え機構4の入力側などに連結されてエンジン1に駆動される。
【0015】
コントロールユニット20は、車速センサ21からの車速信号、シフトレバー17に応動するインヒビタスイッチ22からのレンジ信号、エンジン1(またはエンジン制御装置)からのエンジン回転速度信号、プライマリプーリ回転速度センサ(プライマリプーリ回転速度検出手段)23からのプライマリプーリ10の回転速度信号等の運転状態及び運転操作に基づいて、油圧指令値を決定してクラッチ圧調整装置(油圧制御手段)30へ指令する。なお、インヒビタスイッチ22は、前進(Dレンジ)、中立位置=ニュートラル(Nレンジ)、後退(Rレンジ)のいずれか一つを選択する例を示す。
【0016】
クラッチ圧調整装置30は、この油圧指令値に応じて前進クラッチ41及び後退クラッチ42への供給油圧を調整して前進クラッチ41と後退クラッチ42の締結または解放を行う。
【0017】
これら前進クラッチ41及び後退クラッチ42の締結は排他的に行われ、前進時(レンジ信号=Dレンジ)では、前進クラッチ圧を供給して前進クラッチ41を締結させる一方、後退クラッチ圧をドレンに接続して後退クラッチ42を解放する。後退時(レンジ信号=Rレンジ)では、前進クラッチ圧をドレンに接続して前進クラッチ41を解放させる一方、後退クラッチ圧を供給して後退クラッチ42を締結させる。また、中立位置(レンジ信号=Nレンジ)では、前進クラッチ圧と後退クラッチ圧をドレンに接続し、前進クラッチ41及び後退クラッチ42を共に解放させる。
【0018】
なお、無段変速機5の変速比やVベルト12の接触摩擦力は、コントロールユニット20からの指令に応動する油圧コントロールユニット(図示せず)によって制御される。
【0019】
プライマリプーリ10の回転速度を検出するプライマリプーリ回転速度センサ23は、プライマリプーリ10に取り付けられた出力ギヤ(不図示)に対面する。出力ギアの外周には等間隔で歯が形成されている。このため、プライマリプーリ回転速度センサ23で検出される出力波形は、一定車速では等ピッチのパルス状となる。つまり、プライマリプーリ回転速度センサ23は、プライマリプーリ10の回転と同期したパルス信号を出力するパルスセンサで構成される。
【0020】
シフトレバー17の位置がNレンジであり、車両が停車している場合には、プライマリプーリ10には、エンジン1からの回転が伝達されていないので、プライマリプーリ10は回転していない。そのため、プライマリプーリ回転速度センサ23では、パルス信号が出力されない。しかし、シフトレバー17の位置がNレンジから、例えばDレンジへ変更されると、前進クラッチ41を締結するために、前進クラッチ圧が供給され、前進クラッチ41の出力側にエンジン1からトルクが次第に伝達される。そして、プライマリプーリ10にトルクが伝達され、プライマリプーリ10が回転する。これによって、プライマリプーリ回転速度センサ23では、コントロールユニット20にパルス信号が出力される。
【0021】
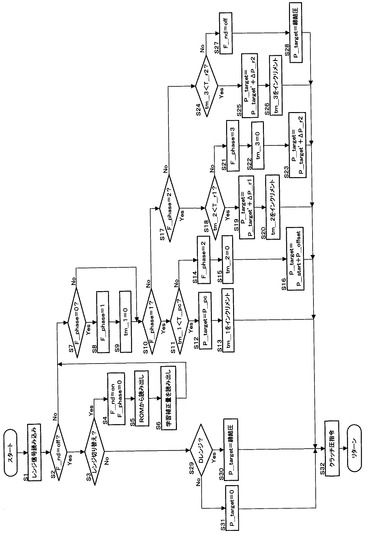
次に、クラッチ圧調整装置30によって行うクラッチ油圧制御について図2のフローチャートを用いて説明する。
【0022】
ステップS1では、インヒビタスイッチ22によって現在のレンジ信号を読み出す。
【0023】
ステップS2では、シフトレバー17がNレンジからDレンジへ切り替えられているかどうかを示すフラグ(以下、ND切り替えフラグとする)F_ndがoffであるかどうか判定する。そして、ND切り替えフラグF_ndがoffである場合には、ステップS3へ進み、ND切り替えフラグF_ndがonである場合には、ステップS7へ進む。なお、本制御の最初の判定では、ND切り替えフラグF_ndはoffとなっており、ステップS3へ進む。
【0024】
ステップS3では、前回制御のレンジ信号を読み出し、ステップS1によって読み出した現在のレンジ信号と比較する。そして、シフトレバー17がNレンジからDレンジへの切り替えが行われたかどうか判定する。そして、シフトレバー17がNレンジからDレンジへ切り替えられた場合には、ステップS4へ進み、NレンジからDレンジへの切り替えられていない場合には、ステップS29へ進む。
【0025】
ステップS4では、ND切り替えフラグF_ndをonとする。また、フェーズフラグF_phaseを、初期化フェーズを示すゼロにセットする。
【0026】
ステップS5では、コントロールユニット20のROMからプリチャージ圧P_pc、プリチャージ時間T_pc、締結初期圧P_start、第1ランプ増加率ΔP_r1、第1ランプ時間T_r1、第2ランプ増加率ΔP_r2、第2ランプ時間T_r2のノミナル値を読み込む。
【0027】
ステップS6では、コントロールユニット20から学習補正量P_offsetを読み出す。学習補正量P_offsetは、例えばEEPROMなどの不揮発性書き換え可能メモリの記憶領域に記憶されている。なお、補正量を学習していない場合には、学習補正量P_offsetはゼロである。学習補正量P_offsetの設定方法については後述する。
【0028】
ステップS2において、ND切り替えフラグF_ndがonであった場合には、ステップS7において、現在のフェーズが初期化フェーズであるかどうか判定する。ここでは、フェーズフラグF_phaseが初期化フェーズを示すゼロであるかどうか判定する。そして、フェーズフラグF_phaseがゼロである場合には、ステップS8へ進み、フェーズフラグF_phaseがゼロではない場合には、ステップS10へ進む。
【0029】
ステップS8では、ND切り替えフラグF_ndがonとなっており、ノミナル値を読み出しているので、プリチャージフェーズへの移行を示すために、フェーズフラグF_phaseを1にセットする。
【0030】
ステップS9では、プリチャージフェーズの経過時間を判定する第1タイマtm_1をゼロに初期化する。
【0031】
ステップS10では、現在のフェーズがプリチャージフェーズであるかどうか判定する。ここでは、フェーズフラグF_phaseがプリチャージフェーズを示す1であるかどうか判定する。そして、フェーズフラグF_phaseが1である場合には、ステップS11へ進み、フェーズフラグF_phaseが1ではない場合には、ステップS17へ進む。
【0032】
ステップS11では、第1タイマtm_1がステップS5で読み出したプリチャージ時間T_pcに達したかどうか判定する。そして、第1タイマtm_1がプリチャージ時間T_pcに達していない場合は、ステップS12へ進み、タイマtm_1がプリチャージ時間T_pcに達した場合には、ステップS14へ進む。
【0033】
ステップS12では、クラッチ油圧指令値P_targetとして、ステップS5によって読み出したプリチャージ圧P_pcを設定する。プリチャージ圧P_pcは、クラッチ油圧指令値の最大圧であり、これによって、前進クラッチ41の無効ストロークを素早く減少させることができる。
【0034】
ステップS13では、第1タイマtm_1をインクリメントする。
【0035】
ステップS11において、第1タイマtm_1がプリチャージ時間T_pcに達している場合には、プリチャージフェーズが終了している。そのため、ステップS14において、フェーズフラグF_phaseを、締結進行フェーズを示す2にセットする。
【0036】
ステップS15では、締結進行フェーズの経過時間を判定する第2タイマtm_2をゼロに初期化する。
【0037】
ステップS16では、クラッチ油圧指令値P_targetをステップS5で読み出した締結初期値P_startとステップS6によって読み出した学習補正量P_offsetとの合計値にセットする(ステップS16が油圧補正手段を構成する)。
【0038】
なお、ステップS6によって読み出した学習補正量P_offsetの符号がマイナスの場合には、クラッチ油圧指令値P_targetは、締結初期値P_startよりも小さい値にセットされる。
【0039】
学習補正量P_offsetは、詳しくは後述する方法によって記憶されており、この学習補正量P_offsetを締結初期値P_startに加算(減算)することで、クラッチの経時劣化、製品間のバラツキ、作動油温などによって生じる、クラッチの締結の遅れ、締結ショックなどを抑制することができる。
【0040】
ステップS10において、フェーズフラグF_phaseが1ではないと判定されると、ステップS17において、現在のフェーズが締結進行フェーズであるかどうか判定する。ここでは、フェーズフラグF_phaseが締結進行フェーズを示す2であるかどうか判定する。そしてフェーズフラグF_phaseが2である場合には、ステップS18へ進み、フェーズフラグF_phaseが2ではない場合には、ステップS24へ進む。
【0041】
ステップS18では、第2タイマtm_2がステップS5で読み出した第1ランプ時間T_r1に達したかどうか判定する。そして、第2タイマtm_2が第1ランプ時間T_r1に達していない場合には、ステップS19へ進み、第2タイマtm_2が第1ランプ時間Tr_1に達している場合には、ステップS21へ進む。
【0042】
ステップS19では、前回の制御におけるクラッチ油圧指令値P_target’にステップS5によって読み出した第1ランプ増加率ΔP_r1を加算して、クラッチ油圧指令値P_targetを算出する。
【0043】
ここでは、現在のフェーズが締結進行フェーズであると判定されると、締結初期値P_start、または締結初期値P_startに学習補正値P_offsetを加算(減算)した値のいずれかの値から、1回の制御サイクル毎に第1ランプ増加率ΔP_r1の割合でクラッチ油圧指令値P_targetが増加する。
【0044】
ステップS20では、第2タイマtm_2をインクリメントする。
【0045】
ステップS18によって、第2タイマtm_2が第1ランプ時間Tr_1に達している場合には、締結進行フェーズが終了している。そのため、ステップS21において、フェーズフラグF_phaseを、最終締結フェーズを示す3にセットする。
【0046】
ステップS22では、最終締結フェーズの経過時間を判定する第3タイマtm_3をゼロに初期化する。
【0047】
ステップS23では、前回の制御におけるクラッチ油圧指令値P_target’に第2ランプ増加率ΔP_r2を加算して、クラッチ油圧指令値P_targetを算出する。
【0048】
なお、この時点においては、前進クラッチ41が既にトルク伝達を開始しているので、前進クラッチ41の締結を素早く完了させるために、第1ランプ増加率ΔP_r1よりも大きい第2ランプ増加率ΔP_r2によって、クラッチ指令油圧P_targetを増加させる。
【0049】
ステップS17において、フェーズフラグF_phaseが2ではないと判定されると、ステップS24において、第3タイマtm_3がステップS5によって読み出した第2ランプ時間T_r2に達したかどうか判定する。そして、第3タイマtm_3が第2ランプ時間T_r2に達していない場合には、ステップS25に進み、第3タイマtm_3が第2ランプ時間T_r2に達している場合には、ステップS27に進む。
【0050】
ステップS25では、前回の制御におけるクラッチ油圧指令値P_target’に第2ランプ増加率ΔP_r2を加算して、クラッチ油圧指令値P_targetを算出する。
【0051】
ステップS26では、第3タイマtm_3をインクリメントする。
【0052】
ステップS24において、第3タイマtm_3が第2ランプ時間T_r2に達していると判定されると、ステップS27において、前進クラッチ41の締結が終了したと判定して、ND切り替えフラグF_ndをoffにする。
【0053】
ステップS28では、クラッチ油圧指令値P_targetを通常時のクラッチ締結圧にセットする。
【0054】
ステップS3によって、シフトレバー17がNレンジからDレンジへ切り替えられていないと判定されると、ステップS29において、シフトレバー17がDレンジにあるか判定する。そして、シフトレバー17がDレンジにある場合には、ステップS30へ進み、シフトレバー17がNレンジにある場合にはステップS31へ進む。
【0055】
ステップS30では、クラッチ油圧指令値P_targetを通常時のクラッチ締結圧にセットする。
【0056】
ステップS31では、クラッチ油圧指令値P_targetを最小圧にセットする。最小圧は、例えば0Mpaである。これによって、前進クラッチ41は解放状態で維持される。
【0057】
ステップS32では、上記制御によって設定したクラッチ油圧指令値P_targetとなるように、クラッチ圧調整装置30によって、前進クラッチ41へ供給する油圧を制御する。
【0058】
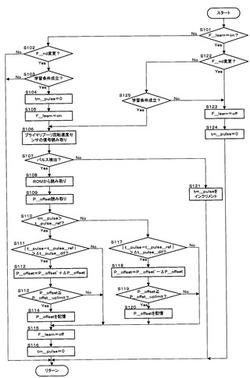
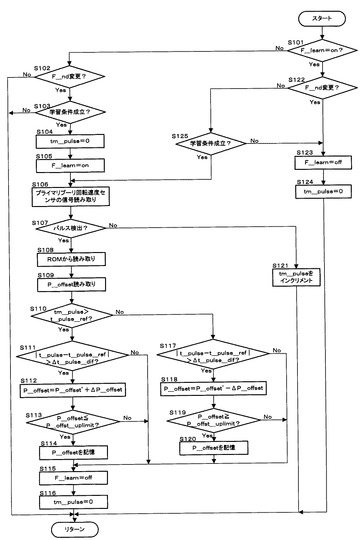
次に、学習補正量P_offsetの設定方法について、図3のフローチャートを用いて説明する。なお、この設定方法は、図2に示すフローチャートと並行して行われる。
【0059】
ステップS101では、学習中フラグF_learnがonであるかどうか判定する。学習中フラグF_learnがoffである場合には、ステップS102へ進み、学習中フラグF_learnがonである場合には、ステップS122へ進む。制御を開始した後の最初の判定時は、学習中フラグF_learnがoffであるために、ステップS102へ進む。
【0060】
ステップS102では、ND切り替えフラグF_ndがoffからonへ変更されたかどうか判定する。この判定は、図2に示すフローチャートのステップS3において、NレンジからDレンジへ切り替えが行われたと判定され、ステップS4において、ND切り替えフラグF_ndがonとなったかどうかによって判定される。そして、ND切り替えフラグF_ndがoffからonへ変更された場合には、ステップS103へ進み、ND切り替えフラグF_ndがoff、あるいはonの状態で維持されている場合には、今回の制御を終了する。
【0061】
ステップS103では、学習条件を満たすかどうか判定する。学習条件は、油温が所定油温よりも高い状態で、かつ車両が停車している状態である。そして、学習条件を満たしている場合には、ステップS104へ進み、学習条件を満たしていない場合には、今回の制御を終了する。
【0062】
油温が低くなると、作動油の粘度が高くなり流動性が悪くなるので、クラッチ油圧指令値P_targetの変化(上昇)に対して、前進クラッチ41への実際の供給圧であるクラッチ実油圧の上昇は遅くなる。このような場合に学習を行い、学習した学習補正量P_offsetを用いて、クラッチ油圧指令値P_target(締結初期圧P_start)を補正すると、油温が通常の使用温度領域となった場合に、クラッチ油圧指令値P_targetの変化に対して、クラッチ実油圧の上昇が早くなる。これにより、油温が通常使用時の油温である場合に、前進クラッチ41の急締結が生じてしまう。そのため、油温が所定油温よりも低い場合には、学習を行わないようにする。
【0063】
また、車両が停車している条件としては、プライマリプーリ10が非回転状態、例えば車速が0km/hであり、かつブレーキスイッチがonとなっている状態である。
【0064】
ステップS104では、学習補正量P_offsetの学習を開始するために、学習用タイマtm_pulseをゼロに初期化する。
【0065】
なお、ステップS104においては、図2において使用した第1タイマ、第2タイマ、第3タイマを用いて、学習用タイマtm_pulseを算出してもよい。
【0066】
ステップS105では、学習中フラグF_learnをonにする。
【0067】
ステップS106では、プライマリプーリ回転速度センサ23からの信号を読み込む。
【0068】
ステップS107では、プライマリプーリ回転速度センサ23がパルス信号を出力したかどうか判定する。そして、パルス信号を出力した場合には、現在の学習用タイマ(経過時間)tm_pulseを算出し、ステップS108へ進む(ステップS107が時間算出手段を構成する)。また、パルス信号を出力していない場合には、ステップS121へ進む。
【0069】
シフトレバー17がNレンジとなっており、車両が停止してる場合には、プライマリプーリ10は回転しておらず、プライマリプーリ回転速度センサ23はパルス信号を出力しない。一方、シフトレバー17がNレンジからDレンジへ変更された場合には、エンジン1からのトルクが徐々に伝達され、プライマリプーリ10が回転する。この場合には、プライマリプーリ回転速度センサ23はパルス信号を出力する。
【0070】
ステップS108では、コントロールユニット20のROMから基準時間t_pulse_refと基準補正量ΔP_offsetとを読み込む(ノミナル値を読み込む)。基準時間t_pulse_refは、前進クラッチ41などに経時劣化などが生じていない場合に、ND切り替えフラグF_ndがoffからonに切り替わってから、プライマリプーリ回転速度センサ23がパルス信号を出力するまでの時間である。基準補正量ΔP_offsetは、予め設定された値であり、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が大きい場合に、1回の学習補正によって、学習補正量P_offsetを補正する値である。
【0071】
ステップS109では、コントロールユニット20の記憶領域から学習補正量P_offsetを読み出す(以下において、ステップS109で読み出した学習補正量P_offsetをP_offset’とする)。なお、記憶領域に学習補正量P_offsetが記憶されていない場合には、学習補正量P_offset’は、ゼロとなる。
【0072】
ステップS110では、プライマリプーリ回転速度センサ23からパルス信号が出力された時の学習タイマtm_pulseと基準時間t_pulse_refとを比較する。学習タイマtm_pulseが基準時間t_pulse_refよりも大きい場合にはステップS111へ進み、学習タイマtm_pulseが基準時間t_pulse_refよりも小さい場合には、ステップS117へ進む。
【0073】
プライマリプーリ回転速度センサ23からパルス信号が出力された時の学習タイマtm_pulseが基準時間t_pulse_refよりも大きい場合には、現在記憶されている学習補正量P_offsetによって補正されたクラッチ油圧指令値P_targetのノミナル値に対して、クラッチ実油圧が低くなる。つまり、前進クラッチ41の締結が遅くなる。また、学習タイマtm_pulseが基準時間t_pulse_refよりも小さい場合には、補正されたクラッチ油圧指令値P_targetのノミナル値に対して、クラッチ実油圧が高くなる。つまり、前進クラッチ41の締結が早くなる。
【0074】
ステップS111では、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が、所定のしきい値Δt_pulse_difよりも大きいかどうか判定する。そして、絶対値が所定のしきい値Δt_pulse_difよりも大きい場合には、ステップS112へ進み、絶対値が所定のしきい値Δt_pulse_difよりも小さい場合には、ステップS115へ進む。
【0075】
学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が、しきい値Δt_pulse_difよりも小さい場合には、ステップS115へ進むことで、現在の学習補正量P_offsetを維持する。これによって、検出誤差などによって、学習補正量P_offsetが変更されることを防止することができる。また、学習補正量P_offsetのハンチング、つまり、前進クラッチ41の締結タイミングのハンチングを防止することができる。所定のしきい値Δt_pulse_difは、検出誤差による影響を防止し、学習補正量P_offsetのハンチングを防止するような値である。
【0076】
なお、ステップS110において、学習タイマtm_pulseが基準時間t_pulse_refよりも大きいと判定されているので、学習タイマtm_pulseと基準時間t_pulse_refとの偏差をとった場合に、偏差の値の符号はプラスとなる。そのため、ステップS111において、偏差の絶対値をとらずに、しきい値Δt_pulse_difを正の値に設定して、これらを比較してもよい。
【0077】
ステップS112では、ステップS109によって読み出した学習補正量P_offset’に基準補正量ΔP_offsetを加算して、学習補正量P_offsetに更新する。学習タイマtm_pulse’と基準時間t_pulse_refとの偏差の絶対値が所定のしきい値Δt_pulse_difよりも大きい場合には、現在の学習補正量P_offset’を更新することで、前進クラッチ41の締結が遅くなることを防止することができる。
【0078】
ステップS113では、ステップS112で更新した学習補正量P_offsetが、補正量上限値P_offset_uplimit以下であるかどうか判定する。そして、学習補正量P_offsetが補正量上限値P_offset_uplimit以下である場合には、ステップS114へ進み、学習補正量P_offsetが補正量上限値P_offset_uplimitよりも大きい場合には、ステップS115へ進む。学習補正量P_offsetが補正量上限値P_offset_uplimitよりも大きい場合には、更新された学習補正量P_offsetをコントロールユニット20の記憶領域に記憶しない。
【0079】
ステップS114では、更新された学習補正量P_offsetをコントロールユニット20の記憶領域へ記憶する。これによって、この後は、コントロールユニット20の記憶領域に記憶された値が学習補正量P_offsetとして使用される(ステップS112からステップS114が油圧補正量学習手段を構成する)。
【0080】
ステップS115では、学習中フラグF_learnをoffにする。これによって、学習制御が終了する。
【0081】
ステップS116では、学習タイマtm_pulseをゼロに初期化する。
【0082】
ステップS110において、学習タイマtm_pulseが基準時間t_pulse_refよりも小さいと判定されると、ステップS117において、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が、所定のしきい値Δt_pulse_difよりも大きいかどうか判定する。そして、絶対値が所定のしきい値Δt_pulse_difよりも大きい場合には、ステップS118へ進み、絶対値が所定のしきい値Δt_pulse_difよりも小さい場合には、ステップS115へ進む。
【0083】
なお、ステップS110において、学習タイマtm_pulseが基準時間t_pulse_refよりも小さいと判定されているので、学習タイマtm_pulseと基準時間t_pulse_refとの偏差をとった場合に、偏差の値の符号はマイナスとなる。そのため、ステップS117において、偏差の絶対値をとらずに、しきい値Δt_pulse_difを負の値に設定して、これらを比較してもよい。このときには、しきい値Δt_pulse_difをマイナスの値に設定し、偏差がしきい値よりもマイナスの方向に大きい場合に、ステップS118へ進む。このような場合には、ステップS111におけるしきい値と、ステップS117におけるしきい値と、を異なる値としてもよく、また、符号のみが異なる値としてもよい。
【0084】
ステップS118では、ステップS109によって読み出した学習補正量P_offset’から基準補正量ΔP_offsetを減算して、学習補正量P_offsetに更新する。学習タイマtm_pulse’と基準時間t_pulse_refとの偏差の絶対値が所定のしきい値Δt_pulse_difよりも小さい場合には、現在の学習補正量P_offset’を更新することで、前進クラッチ41が急締結することを防止することができる。
【0085】
ステップS119では、ステップS118で更新した学習補正量P_offsetが、補正量下限値P_offset_unlimit以上かどうか判定する。そして、学習補正量P_offsetが、補正量下限値P_offset_unlimit以上である場合には、ステップS120へ進み、補正量下限値P_offset_unlimitよりも小さい場合には、ステップS115へ進む。学習補正量P_offsetが補正量下限値P_offset_unlimitよりも小さい場合には、更新された学習補正量P_offsetをコントロールユニット20の記憶領域に記憶しない。
【0086】
学習補正量P_offsetは、符号付きの数値であるため、補正量下限値P_offset_unlimitは、マイナス側の限界値となる。そのため、補正量上限値P_offset_uplimitと、補正量下限値P_offset_unlimitと、を同じ値とする場合には、ステップS119においては、学習補正量P_offsetの絶対値と、補正量下限値P_offset_unlimitの絶対値と、を比較し、学習補正量P_offsetの絶対値が補正量下限値P_offset_unlimitの絶対値よりも小さい場合にステップS120へ進む。
【0087】
ステップS120では、更新された学習補正量P_offsetをコントロールユニット20の記憶領域に記憶する。これによって、この後は、コントロールユニット20の記憶領域に記憶された値が学習補正量P_offsetとして使用される(ステップS118からステップS120が油圧補正量学習手段を構成する)。
【0088】
ステップS107において、プライマリプーリ回転速度センサ23からパルス信号の出力がなかった場合には、ステップS121において、学習用タイマtm_pulseをインクリメントする。
【0089】
ステップS101において、学習中フラグF_learnがonであると判定されると、ステップS122において、ND切り替えフラグF_ndがonからoffへ切り替わったかどうか判定する。そして、ND切り替えフラグF_ndがonからoffへ切り替わった場合には、ステップS123へ進み、ND切り替えフラグF_ndがonからoffへ切り替わっていない場合には、ステップS125へ進む。
【0090】
ステップS123では、学習中フラグF_learnをoffとする。これによって、一旦学習を開始した後に、NレンジからDレンジへの切り替えが中止された場合などに、学習補正量P_offsetの学習を中止し、学習処理が解除される。
【0091】
ステップS124では、学習タイマtm_pulseをゼロに初期化する。
【0092】
ステップS122において、ND切り替えフラグF_ndに変化がないと判定されると、ステップS125では学習条件が成立しているかどうか判定する。学習条件としては、ステップS103と同じ条件である。そして、学習条件が成立している場合には、ステップS106へ進み学習を継続し、学習条件が成立していない場合には、ステップS123へ進む。
【0093】
以上の制御によって、シフトレバー17がNレンジから、Dレンジへ変更され、学習条件が成立している場合に、プライマリプーリ回転速度センサ23からパルス信号が出力されるまでの学習タイマtm_pulseを算出する。そして、算出した学習タイマtm_pulseに基づいて、学習補正量P_offsetを算出し、コントロールユニット20の記憶領域に記憶させる。そして、記憶した学習補正量P_offsetに基づいて、クラッチ油圧指令値P_targetを算出し、油圧を制御することで、前進クラッチ41の締結遅れ、または急締結による締結ショックの発生を防止することができる。
【0094】
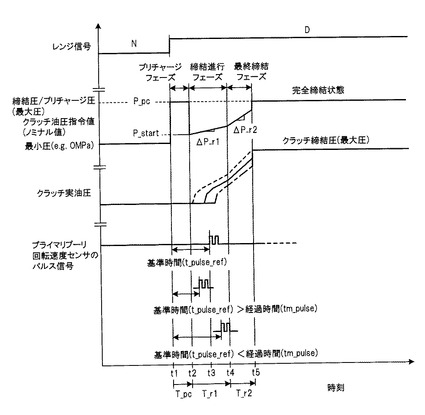
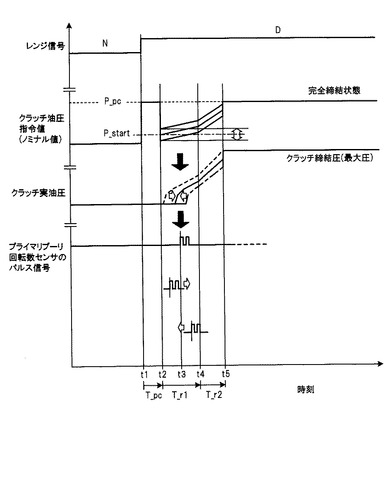
次に、本発明におけるクラッチ実油圧の変化について、図4、5のタイムチャートを用いて説明する。図4は、本発明を用いない場合のクラッチ実油圧の変化を示すタイムチャートである。図5は、本発明を用いた場合のクラッチ実油圧の変化を示すタイムチャートである。
【0095】
本発明を用いない場合、つまりタービン回転速度を検出するセンサを設けていない場合には、時間t1において、シフトレバー17がNレンジからDレンジへ変更されると、プリチャージフェーズを開始する。これによって、クラッチ油圧指令値P_targetは、プリチャージ圧P_pcに設定され、前進クラッチ41の無効ストローク部分が減少する。
【0096】
時間t2において、第1タイマtm_1がプリチャージ時間T_pcとなると、締結進行フェーズに移行する。これによって、クラッチ油圧指令値P_targetはノミナル値に設定され、ノミナル値から第1ランプ増加率ΔP_r1の割合で増加する。
【0097】
時間t4において、第2タイマtm_2が第1ランプ時間T_r1となり最終締結フェーズに移行し、時間t5において第3タイマtm_3が第2ランプ時間T_r2となり前進クラッチ41が完全に締結する。
【0098】
このとき、ノミナル値に対して、クラッチ実油圧が高い側にずれている場合(図4中、破線)に、学習補正量P_offsetを学習することができないと、時間t5のクラッチ締結時に油圧が高く、締結ショックが生じる恐れがある。また、ノミナル値に対して、クラッチ実油圧が低い側にずれている場合(図4中、一点鎖線)には、時間t5のクラッチ締結時に油圧が低く、前進クラッチ41の締結が遅くなる恐れがある。
【0099】
このような場合に、プライマリプーリ回転速度センサ23からのパルス信号の出力に注目すると、ノミナル値に対して、クラッチ実油圧が高い側にずれている場合には、パルス信号を出力したときの経過時間は、基準時間t_pulse_refよりも小さい(短い)。一方、クラッチ実油圧が低い側にずれている場合には、パルス信号を出力したときの時間は、基準時間t_pulse_refよりも大きい(長い)。
【0100】
そこで、本実施形態では、プライマリプーリ回転速度センサ23からパルス信号が出力された時間を学習用タイマtm_pulseとして算出し、この学習用タイマtm_pulseに基づいて、学習補正量P_offsetの学習を行うようにする。これによって、タービン回転速度センサを用いない場合でも、学習補正量P_offsetを学習することができる。
【0101】
そのため、ノミナル値に対して、クラッチ実油圧が高い側にずれている場合、及びクラッチ実油圧が低い側にずれている場合に、図5に示すように、時間t2において、締結進行フェーズに移行する際に、クラッチ油圧指令値P_targetを小さくまたは大きくすることで、クラッチ実油圧の変化をノミナル値における変化とほぼ等しくすることができる。なお、これによって、その後はプライマリプーリ回転速度センサ23がパルス信号を出力する時間も時間t3となる。そして、基準時間t_pulse_refから再び学習用タイマtm_pulseがずれた場合には、再度、学習補正量P_offsetを学習することで、適宜学習補正量P_offsetを更新することができる。
【0102】
なお、この実施形態では、シフトレバー17がNレンジからDレンジへ変更された場合について説明したが、NレンジからRレンジへ変更された場合にも、上記制御を行うことが可能である。また、Lレンジ、Sレンジ、2レンジなどを備えている場合にも、上記制御を行うことが可能である。
【0103】
本発明の第1実施形態の効果について説明する。
【0104】
この実施形態では、シフトレバー17がNレンジからDレンジへ変更され、所定の学習条件が成立した場合に、プライマリプーリ回転速度センサ23がパルス信号を出力するまでの経過時間を学習タイマtm_pulseとして算出し、この学習タイマtm_pulseに基づいて、クラッチ締結時に使用する油圧補正量である学習補正量P_offsetを更新する。これによって、タービン回転速度センサを用いない場合でも、学習補正量P_offsetを更新することができ、経時変化、製品間のバラツキ、作動油温などによるクラッチ締結の遅れ、または締結ショックを抑制することができる。また、部品点数を少なくして、コストを削減することができる(請求項1に対応)。
【0105】
また、学習タイマtm_pulseが予め基準時間t_pulse_refよりも長い場合には、現在の学習補正量P_offset’に基準補正量ΔP_offsetを加算し、学習タイマtm_pulseが基準時間t_pulse_refよりも短い場合には、現在の学習補正量P_offsetから基準補正量ΔP_offsetを減算して、新しい学習補正量P_offsetを算出する。これによって、学習補正量P_offsetを容易に算出することができる(請求項2に対応)。
【0106】
次に本発明の第2実施形態について説明する。
【0107】
この実施形態では、学習補正量P_offsetの設定方法の一部が第1実施形態と異なり、その他の構成、制御については第1実施形態と同じなので、ここでの説明は省略する。
【0108】
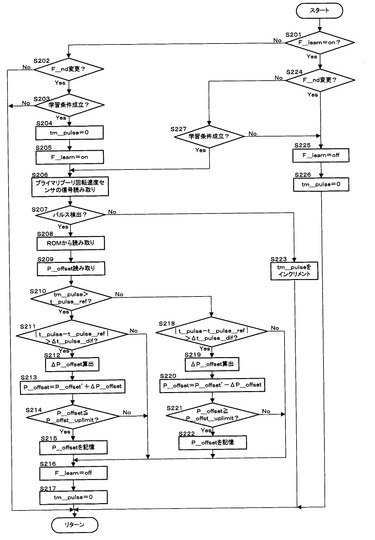
この実施形態の学習補正量P_offsetの設定方法について、図6のフローチャートを用いて説明する。
【0109】
ステップS201からステップS207までの制御は、図3のステップ101からステップS107と同じ制御なので、ここでの説明は省略する。
【0110】
ステップS208では、コントロールユニット20のROMから、基準時間t_pulse_refを読み出す。
【0111】
ステップS209からステップS211の制御は、図3のステップS109からステップS111と同じ制御なので、ここでの説明は省略する。
【0112】
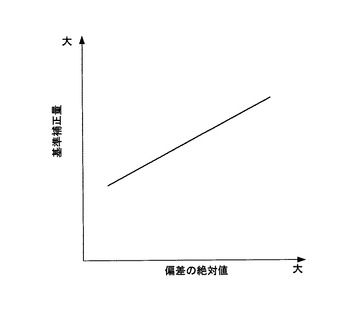
ステップ212では、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値に基づいて、図7に示すマップから、基準補正量ΔP_offsetを算出する。基準補正量ΔP_offsetは、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が大きくなるほど、大きくなる。
【0113】
ステップS213からステップ218までの制御は、図3のステップS112からステップS117と同じ制御なので、ここでの説明は省略する。なお、ステップ213では、ステップS212によって、算出した基準補正量ΔP_offsetを用いる。
【0114】
ステップS219では、ステップS212と同様に、図7に示すマップから基準補正量ΔP_offsetを算出する。
【0115】
ステップS220からステップS227までの制御は、図3のステップS118からステップ125までの制御と同じ制御なので、ここでの説明は省略する。
【0116】
本発明の第2実施形態の効果について説明する。
【0117】
この実施形態では、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値に基づいて、基準補正量ΔP_offsetを算出するので、正確に学習補正量P_offsetを算出することができる(請求項3に対応)。
【0118】
本発明は上記した実施形態に限定されるものではなく、その技術的思想の範囲内でなしうるさまざまな変更、改良が含まれることは言うまでもない。
【図面の簡単な説明】
【0119】
【図1】本発明の第1実施形態のVベルト式無段変速機の概略構成図である。
【図2】本発明の第1実施形態のクラッチ油圧制御を説明するフローチャートである。
【図3】本発明の第1実施形態の学習補正量の設定方法を説明するフローチャートである。
【図4】本発明を用いない場合のクラッチ実油圧の変化を示すタイムチャートである。
【図5】本発明を用いた場合のクラッチ実油圧の変化を示すタイムチャートである。
【図6】本発明の第2実施形態の学習補正量の設定方法を説明するフローチャートである。
【図7】本発明の第2実施形態の基準補正量を算出するマップである。
【符号の説明】
【0120】
1 エンジン
4 前後進切り換え機構
10 プライマリプーリ
11 セカンダリプーリ
12 Vベルト(ベルト)
17 シフトレバー
20 コントロールユニット
22 インヒビタスイッチ
23 プライマリプーリ回転速度センサ(プライマリプーリ回転速度検出手段)
30 クラッチ圧調整装置(油圧制御手段)
41 前進クラッチ
【技術分野】
【0001】
本発明は無段変速機の制御装置に関するものである。
【背景技術】
【0002】
従来、無断変速機において、発進時に運転者がシフトレバーをNレンジからDレンジ(またはRレンジ)に切り替えると、その動きを物理的な連動機構によりマニュアルバルブに伝達し、このマニュアルバルブをクラッチ元圧と前進クラッチのピストン油室とを連通する位置(またはクラッチ元圧と後退クラッチ(ブレーキ)のピストン油室とを連通する位置)に変位させることにより、前進クラッチ(または後退クラッチ)を締結してエンジントルクを無断変速機に伝達している。
【0003】
シフトレバーがNレンジからDレンジ(またはRレンジ)に切り替えられると、大きく分けて3つのフェーズを経て、前進クラッチ(または後退クラッチ)締結が完了する。3つのフェーズは、プリチャージフェーズと、締結進行フェーズと、最終締結フェーズである。プリチャージフェーズは、高い油圧指令値により油圧回路の充填及びクラッチの無効ストローク部分の解消を行う。締結進行フェーズは、プリチャージフェーズの後に油圧指令値を一旦所定値に低下させて、そこから所定増加率で、油圧指令値を上昇させる。最終締結フェーズは、締結進行フェーズの後に、油圧指令値を短時間でクラッチ締結時の最大値まで上昇させる。
【0004】
これらのフェーズについて、クラッチ油圧を油圧指令値によるオープン制御とする場合、クラッチの経時変化や、製品のバラツキ、作動油温などにより、出荷時にATCUのROMに標準で記憶設定されている油圧指令値の基準値(ノミナル値)のままでは、締結遅れを生じたり、逆に締結が早すぎて締結ショックを生じてしまうと、いった問題が生じる。
【0005】
このような問題を解決するものとして、特許文献1に記載されたものがある。これによると、NレンジからDレンジ(Rレンジ)に切り替えられた後、クラッチの入力側回転速度(タービン回転速度)が所定回転速度(停車時、0rpm)となるまでの時間を計測する。そして、締結までの時間が基準時間よりも長い場合には、ノミナル値に対して、油圧指令値を所定量増加するように、学習補正する。一方、締結までの時間が基準時間よりも短い場合には、ノミナル値に対して油圧指令値を所定量減少させるように学習補正する。
【特許文献1】特開平06−265004号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかし、上記の発明では、クラッチの入力側回転速度を検出するセンサが必要となる。そのため、このセンサを有していない場合には、学習補正を実現することができない、といった問題点がある。
【0007】
本発明はこのような問題点を解決するために発明されたもので、クラッチの入力側回転速度を検出するセンサを設けていない場合でも、学習補正を可能とし、クラッチの締結の遅れ、または、急激なクラッチの締結によって生じる締結ショックの発生を抑制することを目的とする。
【課題を解決するための手段】
【0008】
本発明は、プライマリプーリとセカンダリプーリとに巻き掛けられ、溝幅に応じてプーリとの接触半径が変化するベルトを備えた無段変速機を制御する無段変速機の制御装置において、シフトレバー操作位置に応じた信号を出力するインヒビタスイッチと、インヒビタスイッチの出力信号及び車両の運転状態に基づいて、プライマリプーリとエンジンとの間に介装される前進クラッチまたは後退クラッチに供給する油圧を制御する油圧制御手段と、プライマリプーリの回転速度を検出するプライマリプーリ回転速度検出手段と、インヒビタスイッチの出力信号に基づいて、シフトレバー操作位置が、非走行位置から走行位置に切り替えられたことを判定した場合に、判定がされてから、プライマリプーリ回転速度検出手段によってパルス信号が出力されるまでの経過時間を算出する時間算出手段と、インヒビタスイッチの出力信号に基づいて、シフトレバー操作位置が、非走行位置から走行位置に切り替えられたことを判定した場合に、経過時間に基づいて、油圧補正量を学習する油圧補正量学習手段と、シフトレバー操作位置が、非走行位置から走行位置に切り替えられた場合に、オープン制御によって、前進クラッチまたは後退クラッチの一方に供給する油圧を、油圧補正量で補正する油圧補正手段と、を備える。そして、油圧制御手段は、シフトレバー操作位置が、非走行位置から走行位置に切り替えられた場合に、補正制御手段によって補正された油圧を前記前進クラッチまたは後進ブレーキに供給することを特徴とする。
【発明の効果】
【0009】
本発明によると、クラッチの入力側回転速度を検出するセンサを有していない場合でも、油圧補正量を学習することができ、前進クラッチ、または後退クラッチの締結を行う際に、クラッチの締結遅れ、または急激な締結による締結ショックを抑制することができる。
【発明を実施するための最良の形態】
【0010】
本発明の第1実施形態のパワートレインについて、図1の概略構成図を用いて説明する。
【0011】
図1において、パワートレインは、エンジン1に連結された前後進切り換え機構4と、前後進切り換え機構4の出力軸に連結された無段変速機5を主体に構成され、無段変速機5は、一対の可変プーリとして入力軸側のプライマリプーリ10と、出力軸13に連結されたセカンダリプーリ11とを備え、これら一対の可変プーリ10、11はVベルト(ベルト)12によって連結されている。なお、出力軸13はアイドラギアやディファレンシャルギアを介して駆動輪14に連結される。また、前後進切り換え機構4の入力側と、エンジン1との間には、トルクコンバータなどの発進要素(図示せず)が介装される。
【0012】
前後進切り換え機構4は、エンジン1側とプライマリプーリ10との動力伝達経路を切り換える遊星歯車40、前進クラッチ41及び後退クラッチ42から構成され、車両の前進時には前進クラッチ41を締結し、車両の後退時には後退クラッチ42を締結し、中立位置(ニュートラルやパーキング)では前進クラッチ41及び後退クラッチ42を共に解放する。
【0013】
これら前進クラッチ41、後退クラッチ42は、コントロールユニット20からの指令に応じて前進クラッチ41と後退クラッチ42に所定油圧の作動油を供給するクラッチ圧調整装置(油圧制御手段)30によって締結状態の制御が行われる。
【0014】
なお、クラッチ圧調整装置30は、油圧ポンプ15からの油圧を元圧として前進クラッチ41及び後退クラッチ42への供給油圧を調整する。また、油圧ポンプ15は、前後進切り換え機構4の入力側などに連結されてエンジン1に駆動される。
【0015】
コントロールユニット20は、車速センサ21からの車速信号、シフトレバー17に応動するインヒビタスイッチ22からのレンジ信号、エンジン1(またはエンジン制御装置)からのエンジン回転速度信号、プライマリプーリ回転速度センサ(プライマリプーリ回転速度検出手段)23からのプライマリプーリ10の回転速度信号等の運転状態及び運転操作に基づいて、油圧指令値を決定してクラッチ圧調整装置(油圧制御手段)30へ指令する。なお、インヒビタスイッチ22は、前進(Dレンジ)、中立位置=ニュートラル(Nレンジ)、後退(Rレンジ)のいずれか一つを選択する例を示す。
【0016】
クラッチ圧調整装置30は、この油圧指令値に応じて前進クラッチ41及び後退クラッチ42への供給油圧を調整して前進クラッチ41と後退クラッチ42の締結または解放を行う。
【0017】
これら前進クラッチ41及び後退クラッチ42の締結は排他的に行われ、前進時(レンジ信号=Dレンジ)では、前進クラッチ圧を供給して前進クラッチ41を締結させる一方、後退クラッチ圧をドレンに接続して後退クラッチ42を解放する。後退時(レンジ信号=Rレンジ)では、前進クラッチ圧をドレンに接続して前進クラッチ41を解放させる一方、後退クラッチ圧を供給して後退クラッチ42を締結させる。また、中立位置(レンジ信号=Nレンジ)では、前進クラッチ圧と後退クラッチ圧をドレンに接続し、前進クラッチ41及び後退クラッチ42を共に解放させる。
【0018】
なお、無段変速機5の変速比やVベルト12の接触摩擦力は、コントロールユニット20からの指令に応動する油圧コントロールユニット(図示せず)によって制御される。
【0019】
プライマリプーリ10の回転速度を検出するプライマリプーリ回転速度センサ23は、プライマリプーリ10に取り付けられた出力ギヤ(不図示)に対面する。出力ギアの外周には等間隔で歯が形成されている。このため、プライマリプーリ回転速度センサ23で検出される出力波形は、一定車速では等ピッチのパルス状となる。つまり、プライマリプーリ回転速度センサ23は、プライマリプーリ10の回転と同期したパルス信号を出力するパルスセンサで構成される。
【0020】
シフトレバー17の位置がNレンジであり、車両が停車している場合には、プライマリプーリ10には、エンジン1からの回転が伝達されていないので、プライマリプーリ10は回転していない。そのため、プライマリプーリ回転速度センサ23では、パルス信号が出力されない。しかし、シフトレバー17の位置がNレンジから、例えばDレンジへ変更されると、前進クラッチ41を締結するために、前進クラッチ圧が供給され、前進クラッチ41の出力側にエンジン1からトルクが次第に伝達される。そして、プライマリプーリ10にトルクが伝達され、プライマリプーリ10が回転する。これによって、プライマリプーリ回転速度センサ23では、コントロールユニット20にパルス信号が出力される。
【0021】
次に、クラッチ圧調整装置30によって行うクラッチ油圧制御について図2のフローチャートを用いて説明する。
【0022】
ステップS1では、インヒビタスイッチ22によって現在のレンジ信号を読み出す。
【0023】
ステップS2では、シフトレバー17がNレンジからDレンジへ切り替えられているかどうかを示すフラグ(以下、ND切り替えフラグとする)F_ndがoffであるかどうか判定する。そして、ND切り替えフラグF_ndがoffである場合には、ステップS3へ進み、ND切り替えフラグF_ndがonである場合には、ステップS7へ進む。なお、本制御の最初の判定では、ND切り替えフラグF_ndはoffとなっており、ステップS3へ進む。
【0024】
ステップS3では、前回制御のレンジ信号を読み出し、ステップS1によって読み出した現在のレンジ信号と比較する。そして、シフトレバー17がNレンジからDレンジへの切り替えが行われたかどうか判定する。そして、シフトレバー17がNレンジからDレンジへ切り替えられた場合には、ステップS4へ進み、NレンジからDレンジへの切り替えられていない場合には、ステップS29へ進む。
【0025】
ステップS4では、ND切り替えフラグF_ndをonとする。また、フェーズフラグF_phaseを、初期化フェーズを示すゼロにセットする。
【0026】
ステップS5では、コントロールユニット20のROMからプリチャージ圧P_pc、プリチャージ時間T_pc、締結初期圧P_start、第1ランプ増加率ΔP_r1、第1ランプ時間T_r1、第2ランプ増加率ΔP_r2、第2ランプ時間T_r2のノミナル値を読み込む。
【0027】
ステップS6では、コントロールユニット20から学習補正量P_offsetを読み出す。学習補正量P_offsetは、例えばEEPROMなどの不揮発性書き換え可能メモリの記憶領域に記憶されている。なお、補正量を学習していない場合には、学習補正量P_offsetはゼロである。学習補正量P_offsetの設定方法については後述する。
【0028】
ステップS2において、ND切り替えフラグF_ndがonであった場合には、ステップS7において、現在のフェーズが初期化フェーズであるかどうか判定する。ここでは、フェーズフラグF_phaseが初期化フェーズを示すゼロであるかどうか判定する。そして、フェーズフラグF_phaseがゼロである場合には、ステップS8へ進み、フェーズフラグF_phaseがゼロではない場合には、ステップS10へ進む。
【0029】
ステップS8では、ND切り替えフラグF_ndがonとなっており、ノミナル値を読み出しているので、プリチャージフェーズへの移行を示すために、フェーズフラグF_phaseを1にセットする。
【0030】
ステップS9では、プリチャージフェーズの経過時間を判定する第1タイマtm_1をゼロに初期化する。
【0031】
ステップS10では、現在のフェーズがプリチャージフェーズであるかどうか判定する。ここでは、フェーズフラグF_phaseがプリチャージフェーズを示す1であるかどうか判定する。そして、フェーズフラグF_phaseが1である場合には、ステップS11へ進み、フェーズフラグF_phaseが1ではない場合には、ステップS17へ進む。
【0032】
ステップS11では、第1タイマtm_1がステップS5で読み出したプリチャージ時間T_pcに達したかどうか判定する。そして、第1タイマtm_1がプリチャージ時間T_pcに達していない場合は、ステップS12へ進み、タイマtm_1がプリチャージ時間T_pcに達した場合には、ステップS14へ進む。
【0033】
ステップS12では、クラッチ油圧指令値P_targetとして、ステップS5によって読み出したプリチャージ圧P_pcを設定する。プリチャージ圧P_pcは、クラッチ油圧指令値の最大圧であり、これによって、前進クラッチ41の無効ストロークを素早く減少させることができる。
【0034】
ステップS13では、第1タイマtm_1をインクリメントする。
【0035】
ステップS11において、第1タイマtm_1がプリチャージ時間T_pcに達している場合には、プリチャージフェーズが終了している。そのため、ステップS14において、フェーズフラグF_phaseを、締結進行フェーズを示す2にセットする。
【0036】
ステップS15では、締結進行フェーズの経過時間を判定する第2タイマtm_2をゼロに初期化する。
【0037】
ステップS16では、クラッチ油圧指令値P_targetをステップS5で読み出した締結初期値P_startとステップS6によって読み出した学習補正量P_offsetとの合計値にセットする(ステップS16が油圧補正手段を構成する)。
【0038】
なお、ステップS6によって読み出した学習補正量P_offsetの符号がマイナスの場合には、クラッチ油圧指令値P_targetは、締結初期値P_startよりも小さい値にセットされる。
【0039】
学習補正量P_offsetは、詳しくは後述する方法によって記憶されており、この学習補正量P_offsetを締結初期値P_startに加算(減算)することで、クラッチの経時劣化、製品間のバラツキ、作動油温などによって生じる、クラッチの締結の遅れ、締結ショックなどを抑制することができる。
【0040】
ステップS10において、フェーズフラグF_phaseが1ではないと判定されると、ステップS17において、現在のフェーズが締結進行フェーズであるかどうか判定する。ここでは、フェーズフラグF_phaseが締結進行フェーズを示す2であるかどうか判定する。そしてフェーズフラグF_phaseが2である場合には、ステップS18へ進み、フェーズフラグF_phaseが2ではない場合には、ステップS24へ進む。
【0041】
ステップS18では、第2タイマtm_2がステップS5で読み出した第1ランプ時間T_r1に達したかどうか判定する。そして、第2タイマtm_2が第1ランプ時間T_r1に達していない場合には、ステップS19へ進み、第2タイマtm_2が第1ランプ時間Tr_1に達している場合には、ステップS21へ進む。
【0042】
ステップS19では、前回の制御におけるクラッチ油圧指令値P_target’にステップS5によって読み出した第1ランプ増加率ΔP_r1を加算して、クラッチ油圧指令値P_targetを算出する。
【0043】
ここでは、現在のフェーズが締結進行フェーズであると判定されると、締結初期値P_start、または締結初期値P_startに学習補正値P_offsetを加算(減算)した値のいずれかの値から、1回の制御サイクル毎に第1ランプ増加率ΔP_r1の割合でクラッチ油圧指令値P_targetが増加する。
【0044】
ステップS20では、第2タイマtm_2をインクリメントする。
【0045】
ステップS18によって、第2タイマtm_2が第1ランプ時間Tr_1に達している場合には、締結進行フェーズが終了している。そのため、ステップS21において、フェーズフラグF_phaseを、最終締結フェーズを示す3にセットする。
【0046】
ステップS22では、最終締結フェーズの経過時間を判定する第3タイマtm_3をゼロに初期化する。
【0047】
ステップS23では、前回の制御におけるクラッチ油圧指令値P_target’に第2ランプ増加率ΔP_r2を加算して、クラッチ油圧指令値P_targetを算出する。
【0048】
なお、この時点においては、前進クラッチ41が既にトルク伝達を開始しているので、前進クラッチ41の締結を素早く完了させるために、第1ランプ増加率ΔP_r1よりも大きい第2ランプ増加率ΔP_r2によって、クラッチ指令油圧P_targetを増加させる。
【0049】
ステップS17において、フェーズフラグF_phaseが2ではないと判定されると、ステップS24において、第3タイマtm_3がステップS5によって読み出した第2ランプ時間T_r2に達したかどうか判定する。そして、第3タイマtm_3が第2ランプ時間T_r2に達していない場合には、ステップS25に進み、第3タイマtm_3が第2ランプ時間T_r2に達している場合には、ステップS27に進む。
【0050】
ステップS25では、前回の制御におけるクラッチ油圧指令値P_target’に第2ランプ増加率ΔP_r2を加算して、クラッチ油圧指令値P_targetを算出する。
【0051】
ステップS26では、第3タイマtm_3をインクリメントする。
【0052】
ステップS24において、第3タイマtm_3が第2ランプ時間T_r2に達していると判定されると、ステップS27において、前進クラッチ41の締結が終了したと判定して、ND切り替えフラグF_ndをoffにする。
【0053】
ステップS28では、クラッチ油圧指令値P_targetを通常時のクラッチ締結圧にセットする。
【0054】
ステップS3によって、シフトレバー17がNレンジからDレンジへ切り替えられていないと判定されると、ステップS29において、シフトレバー17がDレンジにあるか判定する。そして、シフトレバー17がDレンジにある場合には、ステップS30へ進み、シフトレバー17がNレンジにある場合にはステップS31へ進む。
【0055】
ステップS30では、クラッチ油圧指令値P_targetを通常時のクラッチ締結圧にセットする。
【0056】
ステップS31では、クラッチ油圧指令値P_targetを最小圧にセットする。最小圧は、例えば0Mpaである。これによって、前進クラッチ41は解放状態で維持される。
【0057】
ステップS32では、上記制御によって設定したクラッチ油圧指令値P_targetとなるように、クラッチ圧調整装置30によって、前進クラッチ41へ供給する油圧を制御する。
【0058】
次に、学習補正量P_offsetの設定方法について、図3のフローチャートを用いて説明する。なお、この設定方法は、図2に示すフローチャートと並行して行われる。
【0059】
ステップS101では、学習中フラグF_learnがonであるかどうか判定する。学習中フラグF_learnがoffである場合には、ステップS102へ進み、学習中フラグF_learnがonである場合には、ステップS122へ進む。制御を開始した後の最初の判定時は、学習中フラグF_learnがoffであるために、ステップS102へ進む。
【0060】
ステップS102では、ND切り替えフラグF_ndがoffからonへ変更されたかどうか判定する。この判定は、図2に示すフローチャートのステップS3において、NレンジからDレンジへ切り替えが行われたと判定され、ステップS4において、ND切り替えフラグF_ndがonとなったかどうかによって判定される。そして、ND切り替えフラグF_ndがoffからonへ変更された場合には、ステップS103へ進み、ND切り替えフラグF_ndがoff、あるいはonの状態で維持されている場合には、今回の制御を終了する。
【0061】
ステップS103では、学習条件を満たすかどうか判定する。学習条件は、油温が所定油温よりも高い状態で、かつ車両が停車している状態である。そして、学習条件を満たしている場合には、ステップS104へ進み、学習条件を満たしていない場合には、今回の制御を終了する。
【0062】
油温が低くなると、作動油の粘度が高くなり流動性が悪くなるので、クラッチ油圧指令値P_targetの変化(上昇)に対して、前進クラッチ41への実際の供給圧であるクラッチ実油圧の上昇は遅くなる。このような場合に学習を行い、学習した学習補正量P_offsetを用いて、クラッチ油圧指令値P_target(締結初期圧P_start)を補正すると、油温が通常の使用温度領域となった場合に、クラッチ油圧指令値P_targetの変化に対して、クラッチ実油圧の上昇が早くなる。これにより、油温が通常使用時の油温である場合に、前進クラッチ41の急締結が生じてしまう。そのため、油温が所定油温よりも低い場合には、学習を行わないようにする。
【0063】
また、車両が停車している条件としては、プライマリプーリ10が非回転状態、例えば車速が0km/hであり、かつブレーキスイッチがonとなっている状態である。
【0064】
ステップS104では、学習補正量P_offsetの学習を開始するために、学習用タイマtm_pulseをゼロに初期化する。
【0065】
なお、ステップS104においては、図2において使用した第1タイマ、第2タイマ、第3タイマを用いて、学習用タイマtm_pulseを算出してもよい。
【0066】
ステップS105では、学習中フラグF_learnをonにする。
【0067】
ステップS106では、プライマリプーリ回転速度センサ23からの信号を読み込む。
【0068】
ステップS107では、プライマリプーリ回転速度センサ23がパルス信号を出力したかどうか判定する。そして、パルス信号を出力した場合には、現在の学習用タイマ(経過時間)tm_pulseを算出し、ステップS108へ進む(ステップS107が時間算出手段を構成する)。また、パルス信号を出力していない場合には、ステップS121へ進む。
【0069】
シフトレバー17がNレンジとなっており、車両が停止してる場合には、プライマリプーリ10は回転しておらず、プライマリプーリ回転速度センサ23はパルス信号を出力しない。一方、シフトレバー17がNレンジからDレンジへ変更された場合には、エンジン1からのトルクが徐々に伝達され、プライマリプーリ10が回転する。この場合には、プライマリプーリ回転速度センサ23はパルス信号を出力する。
【0070】
ステップS108では、コントロールユニット20のROMから基準時間t_pulse_refと基準補正量ΔP_offsetとを読み込む(ノミナル値を読み込む)。基準時間t_pulse_refは、前進クラッチ41などに経時劣化などが生じていない場合に、ND切り替えフラグF_ndがoffからonに切り替わってから、プライマリプーリ回転速度センサ23がパルス信号を出力するまでの時間である。基準補正量ΔP_offsetは、予め設定された値であり、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が大きい場合に、1回の学習補正によって、学習補正量P_offsetを補正する値である。
【0071】
ステップS109では、コントロールユニット20の記憶領域から学習補正量P_offsetを読み出す(以下において、ステップS109で読み出した学習補正量P_offsetをP_offset’とする)。なお、記憶領域に学習補正量P_offsetが記憶されていない場合には、学習補正量P_offset’は、ゼロとなる。
【0072】
ステップS110では、プライマリプーリ回転速度センサ23からパルス信号が出力された時の学習タイマtm_pulseと基準時間t_pulse_refとを比較する。学習タイマtm_pulseが基準時間t_pulse_refよりも大きい場合にはステップS111へ進み、学習タイマtm_pulseが基準時間t_pulse_refよりも小さい場合には、ステップS117へ進む。
【0073】
プライマリプーリ回転速度センサ23からパルス信号が出力された時の学習タイマtm_pulseが基準時間t_pulse_refよりも大きい場合には、現在記憶されている学習補正量P_offsetによって補正されたクラッチ油圧指令値P_targetのノミナル値に対して、クラッチ実油圧が低くなる。つまり、前進クラッチ41の締結が遅くなる。また、学習タイマtm_pulseが基準時間t_pulse_refよりも小さい場合には、補正されたクラッチ油圧指令値P_targetのノミナル値に対して、クラッチ実油圧が高くなる。つまり、前進クラッチ41の締結が早くなる。
【0074】
ステップS111では、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が、所定のしきい値Δt_pulse_difよりも大きいかどうか判定する。そして、絶対値が所定のしきい値Δt_pulse_difよりも大きい場合には、ステップS112へ進み、絶対値が所定のしきい値Δt_pulse_difよりも小さい場合には、ステップS115へ進む。
【0075】
学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が、しきい値Δt_pulse_difよりも小さい場合には、ステップS115へ進むことで、現在の学習補正量P_offsetを維持する。これによって、検出誤差などによって、学習補正量P_offsetが変更されることを防止することができる。また、学習補正量P_offsetのハンチング、つまり、前進クラッチ41の締結タイミングのハンチングを防止することができる。所定のしきい値Δt_pulse_difは、検出誤差による影響を防止し、学習補正量P_offsetのハンチングを防止するような値である。
【0076】
なお、ステップS110において、学習タイマtm_pulseが基準時間t_pulse_refよりも大きいと判定されているので、学習タイマtm_pulseと基準時間t_pulse_refとの偏差をとった場合に、偏差の値の符号はプラスとなる。そのため、ステップS111において、偏差の絶対値をとらずに、しきい値Δt_pulse_difを正の値に設定して、これらを比較してもよい。
【0077】
ステップS112では、ステップS109によって読み出した学習補正量P_offset’に基準補正量ΔP_offsetを加算して、学習補正量P_offsetに更新する。学習タイマtm_pulse’と基準時間t_pulse_refとの偏差の絶対値が所定のしきい値Δt_pulse_difよりも大きい場合には、現在の学習補正量P_offset’を更新することで、前進クラッチ41の締結が遅くなることを防止することができる。
【0078】
ステップS113では、ステップS112で更新した学習補正量P_offsetが、補正量上限値P_offset_uplimit以下であるかどうか判定する。そして、学習補正量P_offsetが補正量上限値P_offset_uplimit以下である場合には、ステップS114へ進み、学習補正量P_offsetが補正量上限値P_offset_uplimitよりも大きい場合には、ステップS115へ進む。学習補正量P_offsetが補正量上限値P_offset_uplimitよりも大きい場合には、更新された学習補正量P_offsetをコントロールユニット20の記憶領域に記憶しない。
【0079】
ステップS114では、更新された学習補正量P_offsetをコントロールユニット20の記憶領域へ記憶する。これによって、この後は、コントロールユニット20の記憶領域に記憶された値が学習補正量P_offsetとして使用される(ステップS112からステップS114が油圧補正量学習手段を構成する)。
【0080】
ステップS115では、学習中フラグF_learnをoffにする。これによって、学習制御が終了する。
【0081】
ステップS116では、学習タイマtm_pulseをゼロに初期化する。
【0082】
ステップS110において、学習タイマtm_pulseが基準時間t_pulse_refよりも小さいと判定されると、ステップS117において、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が、所定のしきい値Δt_pulse_difよりも大きいかどうか判定する。そして、絶対値が所定のしきい値Δt_pulse_difよりも大きい場合には、ステップS118へ進み、絶対値が所定のしきい値Δt_pulse_difよりも小さい場合には、ステップS115へ進む。
【0083】
なお、ステップS110において、学習タイマtm_pulseが基準時間t_pulse_refよりも小さいと判定されているので、学習タイマtm_pulseと基準時間t_pulse_refとの偏差をとった場合に、偏差の値の符号はマイナスとなる。そのため、ステップS117において、偏差の絶対値をとらずに、しきい値Δt_pulse_difを負の値に設定して、これらを比較してもよい。このときには、しきい値Δt_pulse_difをマイナスの値に設定し、偏差がしきい値よりもマイナスの方向に大きい場合に、ステップS118へ進む。このような場合には、ステップS111におけるしきい値と、ステップS117におけるしきい値と、を異なる値としてもよく、また、符号のみが異なる値としてもよい。
【0084】
ステップS118では、ステップS109によって読み出した学習補正量P_offset’から基準補正量ΔP_offsetを減算して、学習補正量P_offsetに更新する。学習タイマtm_pulse’と基準時間t_pulse_refとの偏差の絶対値が所定のしきい値Δt_pulse_difよりも小さい場合には、現在の学習補正量P_offset’を更新することで、前進クラッチ41が急締結することを防止することができる。
【0085】
ステップS119では、ステップS118で更新した学習補正量P_offsetが、補正量下限値P_offset_unlimit以上かどうか判定する。そして、学習補正量P_offsetが、補正量下限値P_offset_unlimit以上である場合には、ステップS120へ進み、補正量下限値P_offset_unlimitよりも小さい場合には、ステップS115へ進む。学習補正量P_offsetが補正量下限値P_offset_unlimitよりも小さい場合には、更新された学習補正量P_offsetをコントロールユニット20の記憶領域に記憶しない。
【0086】
学習補正量P_offsetは、符号付きの数値であるため、補正量下限値P_offset_unlimitは、マイナス側の限界値となる。そのため、補正量上限値P_offset_uplimitと、補正量下限値P_offset_unlimitと、を同じ値とする場合には、ステップS119においては、学習補正量P_offsetの絶対値と、補正量下限値P_offset_unlimitの絶対値と、を比較し、学習補正量P_offsetの絶対値が補正量下限値P_offset_unlimitの絶対値よりも小さい場合にステップS120へ進む。
【0087】
ステップS120では、更新された学習補正量P_offsetをコントロールユニット20の記憶領域に記憶する。これによって、この後は、コントロールユニット20の記憶領域に記憶された値が学習補正量P_offsetとして使用される(ステップS118からステップS120が油圧補正量学習手段を構成する)。
【0088】
ステップS107において、プライマリプーリ回転速度センサ23からパルス信号の出力がなかった場合には、ステップS121において、学習用タイマtm_pulseをインクリメントする。
【0089】
ステップS101において、学習中フラグF_learnがonであると判定されると、ステップS122において、ND切り替えフラグF_ndがonからoffへ切り替わったかどうか判定する。そして、ND切り替えフラグF_ndがonからoffへ切り替わった場合には、ステップS123へ進み、ND切り替えフラグF_ndがonからoffへ切り替わっていない場合には、ステップS125へ進む。
【0090】
ステップS123では、学習中フラグF_learnをoffとする。これによって、一旦学習を開始した後に、NレンジからDレンジへの切り替えが中止された場合などに、学習補正量P_offsetの学習を中止し、学習処理が解除される。
【0091】
ステップS124では、学習タイマtm_pulseをゼロに初期化する。
【0092】
ステップS122において、ND切り替えフラグF_ndに変化がないと判定されると、ステップS125では学習条件が成立しているかどうか判定する。学習条件としては、ステップS103と同じ条件である。そして、学習条件が成立している場合には、ステップS106へ進み学習を継続し、学習条件が成立していない場合には、ステップS123へ進む。
【0093】
以上の制御によって、シフトレバー17がNレンジから、Dレンジへ変更され、学習条件が成立している場合に、プライマリプーリ回転速度センサ23からパルス信号が出力されるまでの学習タイマtm_pulseを算出する。そして、算出した学習タイマtm_pulseに基づいて、学習補正量P_offsetを算出し、コントロールユニット20の記憶領域に記憶させる。そして、記憶した学習補正量P_offsetに基づいて、クラッチ油圧指令値P_targetを算出し、油圧を制御することで、前進クラッチ41の締結遅れ、または急締結による締結ショックの発生を防止することができる。
【0094】
次に、本発明におけるクラッチ実油圧の変化について、図4、5のタイムチャートを用いて説明する。図4は、本発明を用いない場合のクラッチ実油圧の変化を示すタイムチャートである。図5は、本発明を用いた場合のクラッチ実油圧の変化を示すタイムチャートである。
【0095】
本発明を用いない場合、つまりタービン回転速度を検出するセンサを設けていない場合には、時間t1において、シフトレバー17がNレンジからDレンジへ変更されると、プリチャージフェーズを開始する。これによって、クラッチ油圧指令値P_targetは、プリチャージ圧P_pcに設定され、前進クラッチ41の無効ストローク部分が減少する。
【0096】
時間t2において、第1タイマtm_1がプリチャージ時間T_pcとなると、締結進行フェーズに移行する。これによって、クラッチ油圧指令値P_targetはノミナル値に設定され、ノミナル値から第1ランプ増加率ΔP_r1の割合で増加する。
【0097】
時間t4において、第2タイマtm_2が第1ランプ時間T_r1となり最終締結フェーズに移行し、時間t5において第3タイマtm_3が第2ランプ時間T_r2となり前進クラッチ41が完全に締結する。
【0098】
このとき、ノミナル値に対して、クラッチ実油圧が高い側にずれている場合(図4中、破線)に、学習補正量P_offsetを学習することができないと、時間t5のクラッチ締結時に油圧が高く、締結ショックが生じる恐れがある。また、ノミナル値に対して、クラッチ実油圧が低い側にずれている場合(図4中、一点鎖線)には、時間t5のクラッチ締結時に油圧が低く、前進クラッチ41の締結が遅くなる恐れがある。
【0099】
このような場合に、プライマリプーリ回転速度センサ23からのパルス信号の出力に注目すると、ノミナル値に対して、クラッチ実油圧が高い側にずれている場合には、パルス信号を出力したときの経過時間は、基準時間t_pulse_refよりも小さい(短い)。一方、クラッチ実油圧が低い側にずれている場合には、パルス信号を出力したときの時間は、基準時間t_pulse_refよりも大きい(長い)。
【0100】
そこで、本実施形態では、プライマリプーリ回転速度センサ23からパルス信号が出力された時間を学習用タイマtm_pulseとして算出し、この学習用タイマtm_pulseに基づいて、学習補正量P_offsetの学習を行うようにする。これによって、タービン回転速度センサを用いない場合でも、学習補正量P_offsetを学習することができる。
【0101】
そのため、ノミナル値に対して、クラッチ実油圧が高い側にずれている場合、及びクラッチ実油圧が低い側にずれている場合に、図5に示すように、時間t2において、締結進行フェーズに移行する際に、クラッチ油圧指令値P_targetを小さくまたは大きくすることで、クラッチ実油圧の変化をノミナル値における変化とほぼ等しくすることができる。なお、これによって、その後はプライマリプーリ回転速度センサ23がパルス信号を出力する時間も時間t3となる。そして、基準時間t_pulse_refから再び学習用タイマtm_pulseがずれた場合には、再度、学習補正量P_offsetを学習することで、適宜学習補正量P_offsetを更新することができる。
【0102】
なお、この実施形態では、シフトレバー17がNレンジからDレンジへ変更された場合について説明したが、NレンジからRレンジへ変更された場合にも、上記制御を行うことが可能である。また、Lレンジ、Sレンジ、2レンジなどを備えている場合にも、上記制御を行うことが可能である。
【0103】
本発明の第1実施形態の効果について説明する。
【0104】
この実施形態では、シフトレバー17がNレンジからDレンジへ変更され、所定の学習条件が成立した場合に、プライマリプーリ回転速度センサ23がパルス信号を出力するまでの経過時間を学習タイマtm_pulseとして算出し、この学習タイマtm_pulseに基づいて、クラッチ締結時に使用する油圧補正量である学習補正量P_offsetを更新する。これによって、タービン回転速度センサを用いない場合でも、学習補正量P_offsetを更新することができ、経時変化、製品間のバラツキ、作動油温などによるクラッチ締結の遅れ、または締結ショックを抑制することができる。また、部品点数を少なくして、コストを削減することができる(請求項1に対応)。
【0105】
また、学習タイマtm_pulseが予め基準時間t_pulse_refよりも長い場合には、現在の学習補正量P_offset’に基準補正量ΔP_offsetを加算し、学習タイマtm_pulseが基準時間t_pulse_refよりも短い場合には、現在の学習補正量P_offsetから基準補正量ΔP_offsetを減算して、新しい学習補正量P_offsetを算出する。これによって、学習補正量P_offsetを容易に算出することができる(請求項2に対応)。
【0106】
次に本発明の第2実施形態について説明する。
【0107】
この実施形態では、学習補正量P_offsetの設定方法の一部が第1実施形態と異なり、その他の構成、制御については第1実施形態と同じなので、ここでの説明は省略する。
【0108】
この実施形態の学習補正量P_offsetの設定方法について、図6のフローチャートを用いて説明する。
【0109】
ステップS201からステップS207までの制御は、図3のステップ101からステップS107と同じ制御なので、ここでの説明は省略する。
【0110】
ステップS208では、コントロールユニット20のROMから、基準時間t_pulse_refを読み出す。
【0111】
ステップS209からステップS211の制御は、図3のステップS109からステップS111と同じ制御なので、ここでの説明は省略する。
【0112】
ステップ212では、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値に基づいて、図7に示すマップから、基準補正量ΔP_offsetを算出する。基準補正量ΔP_offsetは、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値が大きくなるほど、大きくなる。
【0113】
ステップS213からステップ218までの制御は、図3のステップS112からステップS117と同じ制御なので、ここでの説明は省略する。なお、ステップ213では、ステップS212によって、算出した基準補正量ΔP_offsetを用いる。
【0114】
ステップS219では、ステップS212と同様に、図7に示すマップから基準補正量ΔP_offsetを算出する。
【0115】
ステップS220からステップS227までの制御は、図3のステップS118からステップ125までの制御と同じ制御なので、ここでの説明は省略する。
【0116】
本発明の第2実施形態の効果について説明する。
【0117】
この実施形態では、学習タイマtm_pulseと基準時間t_pulse_refとの偏差の絶対値に基づいて、基準補正量ΔP_offsetを算出するので、正確に学習補正量P_offsetを算出することができる(請求項3に対応)。
【0118】
本発明は上記した実施形態に限定されるものではなく、その技術的思想の範囲内でなしうるさまざまな変更、改良が含まれることは言うまでもない。
【図面の簡単な説明】
【0119】
【図1】本発明の第1実施形態のVベルト式無段変速機の概略構成図である。
【図2】本発明の第1実施形態のクラッチ油圧制御を説明するフローチャートである。
【図3】本発明の第1実施形態の学習補正量の設定方法を説明するフローチャートである。
【図4】本発明を用いない場合のクラッチ実油圧の変化を示すタイムチャートである。
【図5】本発明を用いた場合のクラッチ実油圧の変化を示すタイムチャートである。
【図6】本発明の第2実施形態の学習補正量の設定方法を説明するフローチャートである。
【図7】本発明の第2実施形態の基準補正量を算出するマップである。
【符号の説明】
【0120】
1 エンジン
4 前後進切り換え機構
10 プライマリプーリ
11 セカンダリプーリ
12 Vベルト(ベルト)
17 シフトレバー
20 コントロールユニット
22 インヒビタスイッチ
23 プライマリプーリ回転速度センサ(プライマリプーリ回転速度検出手段)
30 クラッチ圧調整装置(油圧制御手段)
41 前進クラッチ
【特許請求の範囲】
【請求項1】
プライマリプーリとセカンダリプーリとに巻き掛けられ、溝幅に応じてプーリとの接触半径が変化するベルトを備えた無段変速機を制御する無段変速機の制御装置において、
シフトレバー操作位置に応じた信号を出力するインヒビタスイッチと、
前記インヒビタスイッチの出力信号及び車両の運転状態に基づいて、前記プライマリプーリとエンジンとの間に介装される前進クラッチまたは後退クラッチに供給する油圧を制御する油圧制御手段と、
前記プライマリプーリの回転速度を検出するプライマリプーリ回転速度検出手段と、
前記インヒビタスイッチの出力信号に基づいて、前記シフトレバー操作位置が、非走行位置から走行位置に切り替えられたことを判定した場合に、前記判定がされてから、前記プライマリプーリ回転速度検出手段によってパルス信号が出力されるまでの経過時間を算出する時間算出手段と、
前記インヒビタスイッチの出力信号に基づいて、前記シフトレバー操作位置が、前記非走行位置から前記走行位置に切り替えられたことを判定した場合に、前記経過時間に基づいて、油圧補正量を学習する油圧補正量学習手段と、
前記シフトレバー操作位置が、前記非走行位置から前記走行位置に切り替えられた場合に、オープン制御によって、前記前進クラッチまたは前記後退クラッチの一方に供給する油圧を、前記油圧補正量で補正する油圧補正手段と、を備え、
前記油圧制御手段は、前記シフトレバー操作位置が、前記非走行位置から前記走行位置に切り替えられた場合に、前記補正制御手段によって補正された油圧を前記前進クラッチまたは後進ブレーキに供給することを特徴とする無段変速機の制御装置。
【請求項2】
前記油圧補正量学習手段は、前記経過時間が、基準時間よりも長い場合には、前記油圧補正量を所定量増加させて学習し、前記経過時間が、前記基準時間よりも短い場合には、前記油圧補正量を所定量減少させて学習することを特徴とする請求項1に記載の無段変速機の制御装置。
【請求項3】
前記油圧補正量学習手段は、前記経過時間と基準時間との偏差に基づいて、前記油圧補正量を算出することを特徴とする請求項1に記載の無段変速機の制御装置。
【請求項1】
プライマリプーリとセカンダリプーリとに巻き掛けられ、溝幅に応じてプーリとの接触半径が変化するベルトを備えた無段変速機を制御する無段変速機の制御装置において、
シフトレバー操作位置に応じた信号を出力するインヒビタスイッチと、
前記インヒビタスイッチの出力信号及び車両の運転状態に基づいて、前記プライマリプーリとエンジンとの間に介装される前進クラッチまたは後退クラッチに供給する油圧を制御する油圧制御手段と、
前記プライマリプーリの回転速度を検出するプライマリプーリ回転速度検出手段と、
前記インヒビタスイッチの出力信号に基づいて、前記シフトレバー操作位置が、非走行位置から走行位置に切り替えられたことを判定した場合に、前記判定がされてから、前記プライマリプーリ回転速度検出手段によってパルス信号が出力されるまでの経過時間を算出する時間算出手段と、
前記インヒビタスイッチの出力信号に基づいて、前記シフトレバー操作位置が、前記非走行位置から前記走行位置に切り替えられたことを判定した場合に、前記経過時間に基づいて、油圧補正量を学習する油圧補正量学習手段と、
前記シフトレバー操作位置が、前記非走行位置から前記走行位置に切り替えられた場合に、オープン制御によって、前記前進クラッチまたは前記後退クラッチの一方に供給する油圧を、前記油圧補正量で補正する油圧補正手段と、を備え、
前記油圧制御手段は、前記シフトレバー操作位置が、前記非走行位置から前記走行位置に切り替えられた場合に、前記補正制御手段によって補正された油圧を前記前進クラッチまたは後進ブレーキに供給することを特徴とする無段変速機の制御装置。
【請求項2】
前記油圧補正量学習手段は、前記経過時間が、基準時間よりも長い場合には、前記油圧補正量を所定量増加させて学習し、前記経過時間が、前記基準時間よりも短い場合には、前記油圧補正量を所定量減少させて学習することを特徴とする請求項1に記載の無段変速機の制御装置。
【請求項3】
前記油圧補正量学習手段は、前記経過時間と基準時間との偏差に基づいて、前記油圧補正量を算出することを特徴とする請求項1に記載の無段変速機の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−222155(P2009−222155A)
【公開日】平成21年10月1日(2009.10.1)
【国際特許分類】
【出願番号】特願2008−68117(P2008−68117)
【出願日】平成20年3月17日(2008.3.17)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
【公開日】平成21年10月1日(2009.10.1)
【国際特許分類】
【出願日】平成20年3月17日(2008.3.17)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
[ Back to top ]