
無段変速機及び変速制御方法
【課題】勾配路を走行中にも車両の駆動力を確保できる無段変速機を提供する。
【解決手段】変速制御部(12)は、車両が急勾配路を走行している場合に、副変速機構(30)をアップシフトを禁止する勾配路アップシフト禁止手段と、勾配路アップシフト禁止手段により副変速機構(30)のアップシフトが禁止されているときに、車両が所定の走行状態で走行している場合は、副変速機構(30)をアップシフトさせる勾配路アップシフト手段と、を備え、勾配路アップシフト手段は、車両が勾配路を走行中であっても、スルー変速比が変化しないようにバリエータ(20)の変速比を副変速機構(30)の変速比の変化に対応して変化させながら副変速機構(30)の変速を実行する。
【解決手段】変速制御部(12)は、車両が急勾配路を走行している場合に、副変速機構(30)をアップシフトを禁止する勾配路アップシフト禁止手段と、勾配路アップシフト禁止手段により副変速機構(30)のアップシフトが禁止されているときに、車両が所定の走行状態で走行している場合は、副変速機構(30)をアップシフトさせる勾配路アップシフト手段と、を備え、勾配路アップシフト手段は、車両が勾配路を走行中であっても、スルー変速比が変化しないようにバリエータ(20)の変速比を副変速機構(30)の変速比の変化に対応して変化させながら副変速機構(30)の変速を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、副変速機を備える無段変速機における勾配路走行中の変速制御に関する。
【背景技術】
【0002】
無段変速機構(バリエータ)と複数の前進ギヤ段に選択的に切り換えられる副変速機構とを有する無断変速機が知られている。このような変速機では、バリエータのみにより構成される無段変速機と比較して、副変速機構により変速領域を拡大することができるので、エンジンの効率を向上させて燃費を向上させることができる。
【0003】
このような変速機において、副変速機構の変速を伴う変速を行う場合は、副変速機構の変速が開始されたときに、バリエータを副変速機構の変速方向と逆側に変速させる。これにより変速前後での変速機全体の変速比が変化せず、エンジンの回転速度の変化が抑制されるので、変速ショックを抑制することができる(特許文献1参照)。
【0004】
また、変速機において、登坂路など勾配路を走行中などエンジン出力に対して走行抵抗が大きい場合は、シフトビジーの防止や駆動力の確保のためアップシフトを禁止する変速機が知られている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−79554号公報
【特許文献2】特開昭62−216831号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前述の従来技術のように、勾配路を走行中など、エンジン出力に対して走行抵抗が大きい場合には、変速機のアップシフトを禁止することによって変速機の変速比をHigh側への変速を規制することによって必要な駆動力を確保する。このような技術は、有段変速機であっても無段変速機であっても同様に用いられている。
【0007】
ところで、バリエータと副変速機構とを協調変速させながら変速する副変速機構付き無段変速機では、副変速機構のLow側とHigh側とで、同一のスルー変速比を達成できる領域(B領域)がある。この領域での走行中であっても、勾配路走行時の駆動力を確保するために副変速機構をLow側の変速比に固定すると、、スルー変速比が同一であるため、副変速機構がHigh側の状態と比べてバリエータがよりHigh側の領域となる。一般的に勾配路では平坦路と比べて車両減速時の減速度が大きくなるため、同一速度から停車までの時間が短くなる。このような状態でバリエータの変速比がHigh側にあるときに停車した場合には、Low側への変速が間に合わずHigh側の変速比で停止する場合がある。
【0008】
このような状況では車両の再発進時に駆動力が不足して運転性が悪化するという問題がある。
【0009】
本発明はこのような問題点に鑑みてなされたものであり、バリエータと副変速機構を備える無段変速機において、勾配路を走行中に車両の駆動力を確保しつつ、勾配路で停車するような場合であっても再発進時の駆動力を得ることができる無段変速機を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の一実施態様によると、車両に搭載され、エンジンの回転速度を変速する無段変速機であって、変速比を無段階に変更することができるバリエータと、バリエータに対して直列に備えられ、複数の摩擦要素の締結及び解放によって変速比を切り替え可能な有段の副変速機構と、車両の運転状態に基づいてエンジン目標到回転速度を算出し、算出した目標回転速度に基づいて目標変速比としての到達スルー変速比を設定し、バリエータの変速比及び副変速機構の変速段の少なくとも一方を変更して、バリエータ及び副変速機構の全体の変速比であるスルー変速比を所定の応答で到達スルー変速比に追従させる変速制御部と、を備え、変速制御部は、車両が勾配路を走行している場合に、副変速機構のアップシフトを禁止する勾配路アップシフト禁止手段と、勾配路アップシフト禁止手段により副変速機構のアップシフトが禁止されたときに、車両が所定の走行状態で走行している場合には、副変速機構をアップシフトさせる勾配路アップシフト手段と、を備え、勾配路アップシフト手段は、車両が勾配路を走行中であっても、スルー変速比が変化しないようにバリエータの変速比を副変速機構の変速比の変化に対応して変化させながら副変速機構の変速を実行することを特徴とする。
【発明の効果】
【0011】
本発明によると、車両が勾配路を走行して副変速機構のアップシフトが禁止された状態であっても、所定の走行状態での走行時では、スルー変速比が変化しないように副変速機構をアップシフトさせるので、バリエータをよりLow側の変速比とすることができ、車両の駆動力を確保しつつ、勾配路での停車時におけるバリエータのLow戻り性を向上させるので、運転性の悪化を防止することができる。
【図面の簡単な説明】
【0012】
【図1】本実施形態の無段変速機を搭載した車両の概略構成図である。
【図2】本発明の実施形態の変速機コントローラの構成の一例を示す説明図である。
【図3】本発明の実施形態の変速マップの一例を示す説明図である。
【図4】本発明の実施形態の勾配路走行時の変速制御のフローチャートである。
【図5】本発明の実施形態の本実施形態の勾配路における変速制御を示す説明図である
【図6】本発明の実施形態の目標到達プライマリ回転速度の上昇を行うマップの一例を示す説明図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照しながら本発明の実施形態について説明する。なお、以下の説明において、ある変速機構の「変速比」は、当該変速機構の入力回転速度を当該変速機構の出力回転速度で割って得られる値である。また、「最Low変速比」は当該変速機構の最大変速比を意味し、「最High変速比」は当該変速機構の最小変速比を意味する。
【0014】
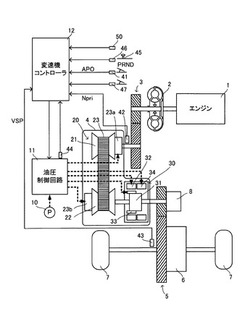
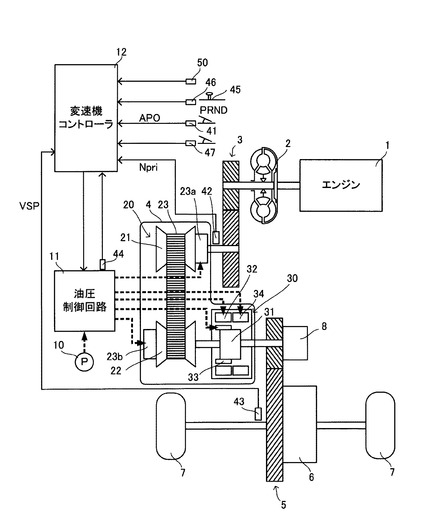
図1は本実施形態の無段変速機を搭載した車両の概略構成図である。この車両は動力源としてエンジン1を備える。エンジン1の出力回転は、ロックアップクラッチ付きトルクコンバータ2、第1ギヤ列3、無段変速機(以下、単に「変速機4」という。)、第2ギヤ列5、終減速装置6を介して駆動輪7へと伝達される。第2ギヤ列5には駐車時に変速機4の出力軸を機械的に回転不能にロックするパーキング機構8が設けられている。
【0015】
また、車両には、エンジン1の動力の一部を利用して駆動されるオイルポンプ10と、オイルポンプ10からの油圧を調圧して変速機4の各部位に供給する油圧制御回路11と、油圧制御回路11を制御する変速機コントローラ12とが設けられている。
【0016】
各構成について説明すると、変速機4は、無段変速機構(以下、「バリエータ20」という。)と、バリエータ20に対して直列に設けられる副変速機構30とを備える。「直列に設けられる」とは同動力伝達経路においてバリエータ20と副変速機構30が直列に設けられるという意味である。副変速機構30は、この例のようにバリエータ20の出力軸に直接接続されていてもよいし、その他の変速ないし動力伝達機構(例えば、ギヤ列)を介して接続されていてもよい。
【0017】
バリエータ20は、プライマリプーリ21と、セカンダリプーリ22と、プーリ21、22の間に掛け回されるVベルト23とを備えるベルト式無段変速機構である。プーリ21、22は、それぞれ固定円錐板と、この固定円錐板に対してシーブ面を対向させた状態で配置され固定円錐板との間にV溝を形成する可動円錐板と、この可動円錐板の背面に設けられて可動円錐板を軸方向に変位させる油圧シリンダ23a、23bとを備える。油圧シリンダ23a、23bに供給される油圧を調整すると、V溝の幅が変化してVベルト23と各プーリ21、22との接触半径が変化し、バリエータ20の変速比vRatioが無段階に変化する。
【0018】
副変速機構30は前進2段・後進1段の変速機構である。副変速機構30は、2つの遊星歯車のキャリアを連結したラビニョウ型遊星歯車機構31と、ラビニョウ型遊星歯車機構31を構成する複数の回転要素に接続され、それらの連係状態を変更する複数の摩擦締結要素(Lowブレーキ32、Highクラッチ33、Revブレーキ34)とを備える。各摩擦締結要素32〜34への供給油圧を調整し、各摩擦締結要素32〜34の締結・解放状態を変更すると、副変速機構30の変速段が変更される。例えば、Lowブレーキ32を締結し、Highクラッチ33とRevブレーキ34を解放すれば副変速機構30の変速段は1速となる。Highクラッチ33を締結し、Lowブレーキ32とRevブレーキ34を解放すれば副変速機構30の変速段は1速よりも変速比が小さな2速となる。また、Revブレーキ34を締結し、Lowブレーキ32とHighクラッチ33を解放すれば副変速機構30の変速段は後進となる。なお、以下の説明では、副変速機構30の変速段が1速であるとき「変速機4が低速モードである」と表現し、2速であるとき「変速機4が高速モードである」と表現する。
【0019】
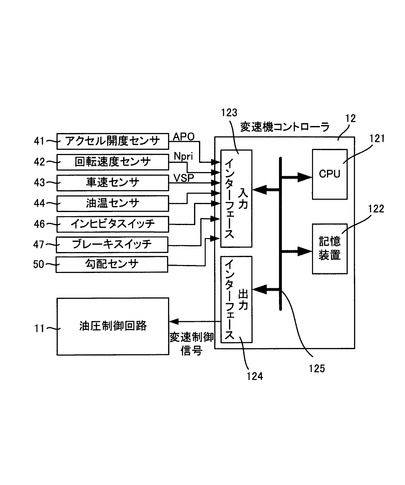
変速機コントローラ12は、図2に示すように、CPU121と、RAM・ROMからなる記憶装置122と、入力インターフェース123と、出力インターフェース124と、これらを相互に接続するバス125とから構成される。
【0020】
入力インターフェース123には、アクセルペダルの開度(以下、「アクセル開度APO」という。)を検出するアクセル開度センサ41の出力信号、変速機4の入力回転速度(=プライマリプーリ21の回転速度、以下、「プライマリ回転速度Npri」という。)を検出する回転速度センサ42の出力信号、車両の走行速度(以下、「車速VSP」という。)を検出する車速センサ43の出力信号、変速機4の油温を検出する油温センサ44の出力信号、セレクトレバー45の位置を検出するインヒビタスイッチ46の出力信号、ブレーキペダルが踏み込まれていることを検出するブレーキスイッチ47の出力信号、車体の進行方向の傾きを検出する勾配センサ50の出力信号などが入力される。
【0021】
記憶装置122には、変速機4の変速制御プログラム、この変速制御プログラムで用いる変速マップ(図3)が格納されている。CPU121は、記憶装置122に格納されている変速制御プログラムを読み出して実行し、入力インターフェース123を介して入力される各種信号に対して各種演算処理を施して変速制御信号を生成し、生成した変速制御信号を出力インターフェース124を介して油圧制御回路11に出力する。CPU121が演算処理で使用する各種値、その演算結果は記憶装置122に適宜格納される。
【0022】
油圧制御回路11は複数の流路、複数の油圧制御弁で構成される。油圧制御回路11は、変速機コントローラ12からの変速制御信号に基づき、複数の油圧制御弁を制御して油圧の供給経路を切り換えるとともにオイルポンプ10で発生した油圧から必要な油圧を調製し、これを変速機4の各部位に供給する。これにより、バリエータ20の変速比vRatio、副変速機構30の変速段が変更され、変速機4の変速が行われる。
【0023】
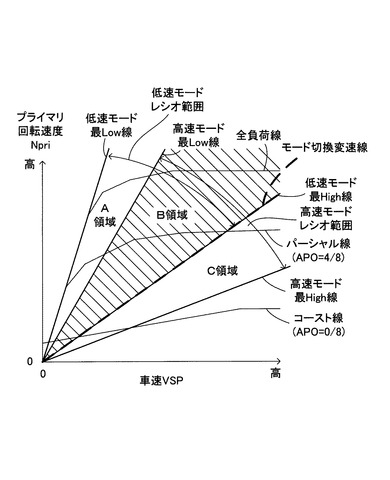
図3は変速機コントローラ12の記憶装置122に格納される変速マップの一例を示している。
【0024】
この変速マップ上では変速機4の動作点が車速VSPとプライマリ回転速度Npriとに基づき決定される。変速機4の動作点と変速マップ左下隅の零点を結ぶ線の傾きが変速機4の変速比(バリエータ20の変速比vRatioに副変速機構30の変速比subRatioを掛けて得られる全体の変速比、以下、「スルー変速比Ratio」という。)を表している。この変速マップには、従来のベルト式無段変速機の変速マップと同様に、アクセル開度APO毎に変速線が設定されており、変速機4の変速はアクセル開度APOに応じて選択される変速線に従って行われる。なお、図3には簡単のため、全負荷線(アクセル開度APO=8/8のときの変速線)、パーシャル線(アクセル開度APO=4/8のときの変速線)、コースト線(アクセル開度APO=0のときの変速線)のみが示されている。
【0025】
変速機4が低速モードのときは、変速機4はバリエータ20の変速比vRatioを最大にして得られる低速モード最Low線とバリエータ20の変速比vRatioを最小にして得られる低速モード最High線の間で変速することができる。このとき、変速機4の動作点はA領域とB領域内を移動する。一方、変速機4が高速モードのときは、変速機4はバリエータ20の変速比vRatioを最大にして得られる高速モード最Low線とバリエータ20の変速比vRatioを最小にして得られる高速モード最High線の間で変速することができる。このとき、変速機4の動作点はB領域とC領域内を移動する。
【0026】
副変速機構30の各変速段の変速比は、低速モード最High線に対応する変速比(低速モード最High変速比)が高速モード最Low線に対応する変速比(高速モード最Low変速比)よりも小さくなるように設定される。これにより、低速モードでとりうる変速機4のスルー変速比Ratioの範囲である低速モードレシオ範囲と高速モードでとりうる変速機4のスルー変速比Ratioの範囲である高速モードレシオ範囲とが部分的に重複し、変速機4の動作点が高速モード最Low線と低速モード最High線で挟まれるB領域にあるときは、変速機4は低速モード、高速モードのいずれのモードも選択可能になっている。
【0027】
変速機コントローラ12は、この変速マップを参照して、車速VSP及びアクセル開度APO(車両の運転状態)に対応するスルー変速比Ratioを到達スルー変速比DRatioとして設定する。この到達スルー変速比DRatioは、当該運転状態でスルー変速比Ratioが最終的に到達すべき目標値である。そして、変速機コントローラ12は、スルー変速比Ratioを所望の応答特性で到達スルー変速比DRatioに追従させるための過渡的な目標値である目標スルー変速比tRatioを設定し、スルー変速比Ratioが目標スルー変速比tRatioに一致するようにバリエータ20及び副変速機構30を制御する。
【0028】
また、変速マップ上には副変速機構30の変速を行うモード切換変速線(副変速機構30の1−2変速線)が低速モード最High線上に重なるように設定されている。モード切換変速線に対応するスルー変速比(以下、「モード切換変速比mRatio」という。)は低速モード最High変速比に等しい。
【0029】
そして、変速機4の動作点がモード切換変速線を横切った場合、すなわち、変速機4のスルー変速比Ratioがモード切換変速比mRatioを跨いで変化した場合は、変速機コントローラ12はモード切換変速制御を行う。このモード切換変速制御では、変速機コントローラ12は、副変速機構30の変速を行うとともに、バリエータ20の変速比vRatioを副変速機構30の変速比subRatioが変化する方向と逆の方向に変化させる協調変速を行う。
【0030】
協調変速では、変速機4のスルー変速比Ratioがモード切換変速比mRatioよりも大きい状態から小さい状態になったときは、変速機コントローラ12は、副変速機構30の変速段を1速から2速に変更(以下、「1−2変速」という。)するとともに、バリエータ20の変速比vRatioを変速比大側に変化させる。逆に、変速機4のスルー変速比Ratioがモード切換変速比mRatioよりも小さい状態から大きい状態になったときは、変速機コントローラ12は、副変速機構30の変速段を2速から1速に変更(以下、「2−1変速」という。)するとともに、バリエータ20の変速比vRatioを変速比小側に変化させる。
【0031】
モード切換変速時、協調変速を行うのは、変速機4のスルー変速比Ratioの段差により生じる入力回転の変化に伴う運転者の違和感を抑えるためである。また、モード切換変速をバリエータ20の変速比vRatioが最High変速比のときに行うのは、この状態では副変速機構30に入力されるトルクがそのときにバリエータ20に入力されるトルクのもとでは最小になっており、この状態で副変速機構30を変速すれば副変速機構30の変速ショックを緩和することができるからである。
【0032】
また、この変速マップに従えば、車両が停車する際、バリエータ20の変速比vRatioは最Low変速比となり、また、副変速機構30の変速段は1速となる。
【0033】
次に、車両が勾配路を走行時の制御を説明する。
【0034】
変速機コントローラ12は、車両が登坂路などの勾配路を走行中である場合に、副変速機構30をLowモードからHighモードへと禁止する勾配路アップシフト禁止制御を行う。
【0035】
具体的には、変速機コントローラ12は、勾配センサ50から取得した信号によって走行中の路面の勾配を取得する。なお、路面の勾配は、勾配センサ50のみによって取得してもよいし、現在のスルー変速比Ratioから予測される車速と実際の車速VSPとを比較して路面勾配を推定してもよい。これら両者の組み合わせによって路面の勾配を推定してもよい。
【0036】
変速機コントローラ12は、取得した路面の勾配が0よりも大きく、車両が勾配路を走行中であると判定した場合は、副変速機構30のアップシフトを禁止する。具体的には、副変速機構30がLowモードである場合には、Highモードへの変速を禁止する。副変速機構30をよりLow側で使用することによって、副変速機構30がHigh側である場合と比較してエンジン1のトルクを上昇させやすくして、勾配路における駆動力を確保することができる。
【0037】
一方で、勾配路を走行時に副変速機構30のアップシフトを禁止し、Lowモードで走行中の場合であって、現在の変速点がB領域での走行中の場合のバリエータ20の変速比は、副変速機構30がHighモードである場合と比較して変速比がHigh側となっている。
【0038】
このような状態で車両がコースト状態から停車に至る場合は、バリエータ20が最Lowへと変速するLow戻り性が悪化し、最Lowに至る前に停車する可能性がある。バリエータ20が最Lowとならない場合はその後の再発進時の駆動力が低下するという問題が発生する。特に、勾配路では平坦路の減速時に比べて車両の減速度が大きくなり、車両停止までの時間が短くなるため、バリエータのLow戻り性が悪化する。
【0039】
このような状況からの再発進時においては、発進時の駆動力の不足に伴って運転者がアクセルを踏み増しすることによって、燃料消費量の悪化が懸念される。
【0040】
そこで、勾配路を走行中であって、所定の走行状態での走行中の場合には、バリエータ20の変速比をLow側の変速比としてLow戻り性の悪化を抑制することが望ましい。
【0041】
本実施形態では、次のような勾配路アップシフト制御を実行することによって、勾配路を走行時のバリエータ20のLow戻り性の悪化を抑制して、車両が勾配路で急停車してからの再発進時であっても発進時の駆動力を確保することができるように構成した。
【0042】
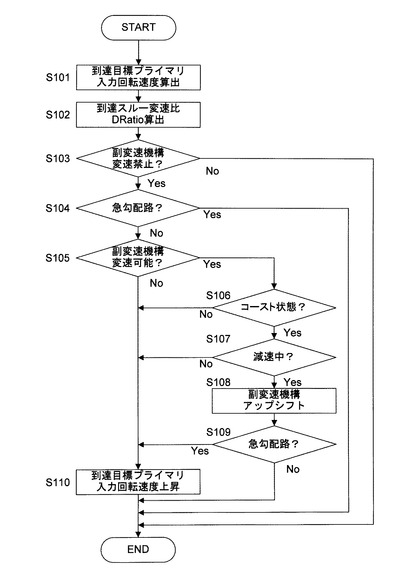
図4は、本実施形態の変速機コントローラ12が実行する、勾配路を走行時の勾配路アップシフト制御のフローチャートである。なお、本フローチャートの処理は変速機コントローラ12において所定間隔(例えば10ms)で実行される。
【0043】
変速機コントローラ12は、現在の車両の状態(車速VSP、プライマリ回転速度Npri等)から変速比を決定するために、まず到達目標プライマリ回転速度を算出する(S101)。到達目標プライマリ回転速度は、図3の変速マップにおける現在の変速点からの目標値となる変速点に対応するプライマリ回転速度Npriである。プライマリ回転速度Npriは、トルクコンバータ2がロックアップ状態である場合は、エンジン1の回転速度とほぼ等しい。
【0044】
次に、算出した到達目標プライマリ回転速度に基づいて、変速機4の到達スルー変速比DRatioを決定する(S102)。
【0045】
次に、変速機コントローラ12は、勾配センサ50等から取得した走行中の路面の勾配から勾配路か否かを判定して、勾配路であった場合に副変速機構30のアップシフトを禁止するか否かを判定する(S103)。勾配路でなく副変速機構30のアップシフトを許容する状態である場合には、本フローチャートによる処理を終了する。
【0046】
勾配路であって副変速機構30のアップシフトを禁止すると判定した場合は、ステップS104に移行して、変速機コントローラ12は、勾配路が急勾配路であるか否かを判定する(S104)。勾配路が急勾配路であると判定した場合は、副変速機構30のアップシフトの規制を維持したまま、本フローチャートによる処理を終了する。なお、急勾配路であるか否かは、勾配センサ50の検出精度にもよるが、例えば15%以上であるときに急勾配路と判定する。
【0047】
急勾配路でないと判定した場合は、変速機コントローラ12は、車両が所定の走行状態であるか否かを、ステップS105からS107の条件から判定し、所定の走行状態である場合に副変速機構30のアップシフトを許容する。
【0048】
まず、ステップS105に移行して、副変速機構30がアップシフト可能であるか否かを判定する。副変速機構30が既にHighモードである場合や、図3の変速マップによりHighモードにアップシフト不可能な領域である場合はステップS110に移行する
。なお、アップシフト不可能な領域とは、例えば図3の変速マップにおいて現在の変速点がA領域にある場合である。
【0049】
副変速機構30がLowモードであってアップシフト可能な領域(例えばB領域)である場合は、ステップS106に移行して、変速機コントローラ12は、現在の運転状態がコースト状態であるか否かを判定する。コースト状態でないと判定した場合はステップS110に移行する。運転状態がコースト状態であると判定した場合は、ステップS107に移行する。
【0050】
現在の運転状態がコースト状態であると判定した場合は、ステップ107に移行して。変速機コントローラ12は、現在車両が減速中であるか否かを判定する。車両が減速中でないと判定した場合はステップS110に移行する。車両が減速中であると判定した場合はステップS108に移行する。すなわち、勾配路を走行中であって、車両の状態がコースト状態であり、かつ、減速中である場合は、副変速機構30のアップシフトを実行する。
【0051】
このとき、変速機コントローラ12は、副変速機構30をLowモードからHighモードにアップシフトを行うと共に、バリエータ20の変速比を副変速機構30の変速比の変化とは逆の方向に変化させる協調変速を行う。協調変速によってアップシフト開始前と終了後とで変速機4のスルー変速比Ratioは変化しない。副変速機構30の変速比がHigh側にとなることにより、バリエータ20の変速比がよりLow側の変速比となる。
【0052】
副変速機構30とバリエータ20とで協調変速を行った後、ステップS109に移行して、変速機コントローラ12は、走行中の路面が急勾配路となったか否かを判定する。急勾配路であると判定した場合はステップS110に移行する。急勾配路でないと判定した場合は、本フローチャートによる制御を終了する。
【0053】
ステップS105において副変速機構30がHighモードにアップシフト可能でない場合、ステップS106において車両の状態がコースト状態でない場合、ステップS107において車両の状態が減速中でない場合、または、ステップS109において副変速機構30をアップシフトさせた後に急勾配路であると判定した場合は、ステップS110に移行する。ステップS110では、変速機コントローラ12は、到達目標プライマリ回転速度を上昇させる制御を行う。なお、本実施形態では、図5で説明するように、一例としてエンジン1の最低回転速度に基づいて予め設定されているコースト線をエンジン1の回速度が大側となる側に補正する。コースト線が上昇することによって、到達目標プライマリ回転速度が上昇する。
【0054】
このステップS110の処理の後、本フローチャートによる処理を終了する。以降は、補正されたコースト線に基づいて到達目標プライマリ回転速度を設定し、到達目標プライマリ回転速度に基づいて変速機4の到達スルー変速比DRatioを決定し、決定された到達スルー変速比DRatioにスルー変速比Ratioを所望の応答特性で追従させるように、変速機4の変速比を制御する。
【0055】
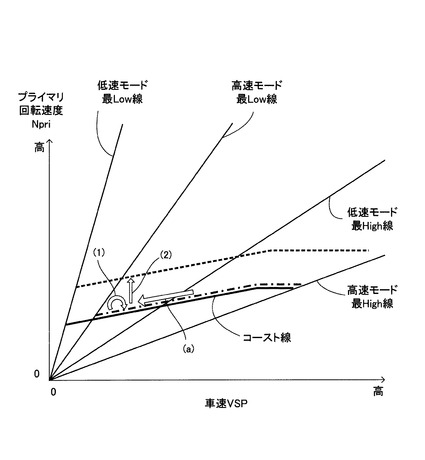
図5は、本実施形態の勾配路における変速制御を示す説明図である。
【0056】
なお、ここでは、車両がコースト線に沿って減速中である場合における変速制御を示す。なお、コースト状態とは、アクセルペダルが離されてアクセル開度APOが0で、ブレーキスイッチ47によって運転者によりブレーキペダルが踏まれていることを検出した状態である。
【0057】
コースト状態においては、車両は図5の矢印(a)に示すように、エンジン1の最低回転速度等に基づいて予め決定されているコースト線に沿って変速点が減速側に移動する。
【0058】
ここで、勾配路であり副変速機構30のアップシフトを禁止した状態で、急勾配路であることを判定し(ステップS104でYes)、副変速機構30がLowモードであってアップシフト可能である場合(ステップS105でYes)は、車両の状態がコースト状態であり(ステップS106でYes)かつ減速中である場合(ステップS107でYes)は、ステップS108において、副変速機構30をLowモードからHighモードへとアップシフトさせる(矢印(1))。
【0059】
副変速機構30のアップシフトによって、バリエータ20の変速比がLow側の変速比へと変化する。これにより、平坦路に比べて停車までの時間が短い勾配路において、車両が停止に至ったとしてもバリエータ20がLow側に変速比であるので、素早く最Lowへと移行することができ、Low戻り性の悪化を防止して、車両の再発進性を確保することができる。
【0060】
なお、このときの運転状態は、副変速機構30が低速モード最High線と高速モード最Low線との間の領域において制御される。
【0061】
副変速機構30をアップシフトさせた後、路面が急勾配であると判定した場合は(ステップS109でYes)、図4のステップS110で説明したように、コースト線を大側に補正する(矢印(2))。
【0062】
コースト線を大側に補正することによって、目標到達プライマリ回転速度の下限を上昇させ、エンジン1の最低回転速度を大側に補正するので、急勾配路のコースト運転中であっても、バリエータの変速比をLow側に補正することで、停車時であってもバリエータのLow戻り性の悪化を防止し、再発進性を確保する。
【0063】
なお、コースト線を大側に補正する場合は、変速機コントローラ12は、車両の運転状態に基づいて、どの程度大側に補正するかを決定する。
【0064】
図6は、本実施形態の変速機コントローラ12による目標到達プライマリ回転速度の上昇を行うためのマップの一例を示す説明図である。
【0065】
前述したように、変速機コントローラ12は、車両が勾配路を走行中であり、かつ路面が急勾配路である場合に、エンジン1の回転速度を上昇させて駆動力を確保するために、目標到達プライマリ回転速度を上昇させる。
【0066】
このとき、車速VSPが大きい場合はエンジン1の回転速度もそれに対応して大きいため、大きな補正は必要なく、また、補正量を大きくするとエンジン1の回転速度が吹け上がりオーバーレブとなる可能性がある。一方で、勾配路では車速が低いと減速によって停車に至りやすい。そのため、車速が小さいほど補正量を大きく補正する。
【0067】
また、勾配路の勾配が急勾配であれば停車までの時間がより短くなるので、勾配が急であるほど補正量を大きくする。
【0068】
このように、変速機コントローラ12は、車速が低いほど、勾配が急であるほど、到達目標プライマリ回転速度の補正量を大きく設定する。設定されたマップは、変速機コントローラ12の記憶装置122に予め記憶しておく。
【0069】
以上のように、本発明の実施形態では、無段変速機構(バリエータ)20と複数の変速段を有する副変速機構30とからなり、変速領域を拡大できる無段変速機において、通常は勾配路を走行中には副変速機構20のアップシフトが禁止されるが、所定の走行状態、すなわち、勾配路を走行中であり、かつ、コースト状態で減速している場合には、副変速機構のアップシフトを許容する。
【0070】
このとき、副変速機構30とバリエータ20とでスルー変速比Ratioが変化しないように協調変速を行うので、結果としてバリエータ20の変速比がLow側の変速比となる。これにより、バリエータ20のLow戻り性の悪化が抑制されるので、急勾配路を走行中に停車に至った場合にも、バリエータ20がLow側の変速比となり、車両の再発進性が確保されて運転性の悪化を防止することができる。これらの効果は請求項1、3及び5に対応する。
【0071】
また、急勾配路を走行中は、目標到達プライマリ回転速度(エンジン回転速度)をの下限値(コースト線)を上昇させるように補正することによって、エンジン1の回転速度の下限値を上昇させることで、急勾配路のコースト走行中であっても、バリエータのLow戻り性の悪化を防止し、停車時からの再発進性を確保することができるので、運転性の悪化を防止することができる。
【0072】
また、このエンジン1の回転速度の補正は、車速VSPが小さいほど、勾配が急であるほど、大きく補正することにより、車両の状態及び路面の状態に応じて、適切に駆動力を確保することができる。これらの効果は請求項2及び4に対応する。
【0073】
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例の一つを示したものに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
【0074】
例えば、上記実施形態では、バリエータ20としてベルト式無段変速機構を備えているが、バリエータ20は、Vベルト23の代わりにチェーンがプーリ21、22の間に掛け回される無段変速機構であってもよい。あるいは、バリエータ20は、入力ディスクと出力ディスクの間に傾転可能なパワーローラを配置するトロイダル式無段変速機構であってもよい。
【0075】
また、上記実施形態では、副変速機構30は前進用の変速段として1速と2速の2段を有する変速機構としたが、副変速機構30を前進用の変速段として3段以上の変速段を有する変速機構としても構わない。
【0076】
また、副変速機構30をラビニョウ型遊星歯車機構を用いて構成したが、このような構成に限定されない。例えば、副変速機構30は、通常の遊星歯車機構と摩擦締結要素を組み合わせて構成してもよいし、あるいは、ギヤ比の異なる複数の歯車列で構成される複数の動力伝達経路と、これら動力伝達経路を切り換える摩擦締結要素とによって構成してもよい。
【0077】
また、プーリ21、22の可動円錐板を軸方向に変位させるアクチュエータとして油圧シリンダ23a、23bを備えているが、アクチュエータは油圧で駆動されるものに限らず電気的に駆動されるものあってもよい。
【符号の説明】
【0078】
1 エンジン
4 無段変速機
11 油圧制御回路
12 変速機コントローラ
20 バリエータ(無段変速機構)
21 プライマリプーリ
22 セカンダリプーリ
23 Vベルト
30 副変速機構
50 勾配センサ
【技術分野】
【0001】
本発明は、副変速機を備える無段変速機における勾配路走行中の変速制御に関する。
【背景技術】
【0002】
無段変速機構(バリエータ)と複数の前進ギヤ段に選択的に切り換えられる副変速機構とを有する無断変速機が知られている。このような変速機では、バリエータのみにより構成される無段変速機と比較して、副変速機構により変速領域を拡大することができるので、エンジンの効率を向上させて燃費を向上させることができる。
【0003】
このような変速機において、副変速機構の変速を伴う変速を行う場合は、副変速機構の変速が開始されたときに、バリエータを副変速機構の変速方向と逆側に変速させる。これにより変速前後での変速機全体の変速比が変化せず、エンジンの回転速度の変化が抑制されるので、変速ショックを抑制することができる(特許文献1参照)。
【0004】
また、変速機において、登坂路など勾配路を走行中などエンジン出力に対して走行抵抗が大きい場合は、シフトビジーの防止や駆動力の確保のためアップシフトを禁止する変速機が知られている(特許文献2参照)。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平5−79554号公報
【特許文献2】特開昭62−216831号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
前述の従来技術のように、勾配路を走行中など、エンジン出力に対して走行抵抗が大きい場合には、変速機のアップシフトを禁止することによって変速機の変速比をHigh側への変速を規制することによって必要な駆動力を確保する。このような技術は、有段変速機であっても無段変速機であっても同様に用いられている。
【0007】
ところで、バリエータと副変速機構とを協調変速させながら変速する副変速機構付き無段変速機では、副変速機構のLow側とHigh側とで、同一のスルー変速比を達成できる領域(B領域)がある。この領域での走行中であっても、勾配路走行時の駆動力を確保するために副変速機構をLow側の変速比に固定すると、、スルー変速比が同一であるため、副変速機構がHigh側の状態と比べてバリエータがよりHigh側の領域となる。一般的に勾配路では平坦路と比べて車両減速時の減速度が大きくなるため、同一速度から停車までの時間が短くなる。このような状態でバリエータの変速比がHigh側にあるときに停車した場合には、Low側への変速が間に合わずHigh側の変速比で停止する場合がある。
【0008】
このような状況では車両の再発進時に駆動力が不足して運転性が悪化するという問題がある。
【0009】
本発明はこのような問題点に鑑みてなされたものであり、バリエータと副変速機構を備える無段変速機において、勾配路を走行中に車両の駆動力を確保しつつ、勾配路で停車するような場合であっても再発進時の駆動力を得ることができる無段変速機を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の一実施態様によると、車両に搭載され、エンジンの回転速度を変速する無段変速機であって、変速比を無段階に変更することができるバリエータと、バリエータに対して直列に備えられ、複数の摩擦要素の締結及び解放によって変速比を切り替え可能な有段の副変速機構と、車両の運転状態に基づいてエンジン目標到回転速度を算出し、算出した目標回転速度に基づいて目標変速比としての到達スルー変速比を設定し、バリエータの変速比及び副変速機構の変速段の少なくとも一方を変更して、バリエータ及び副変速機構の全体の変速比であるスルー変速比を所定の応答で到達スルー変速比に追従させる変速制御部と、を備え、変速制御部は、車両が勾配路を走行している場合に、副変速機構のアップシフトを禁止する勾配路アップシフト禁止手段と、勾配路アップシフト禁止手段により副変速機構のアップシフトが禁止されたときに、車両が所定の走行状態で走行している場合には、副変速機構をアップシフトさせる勾配路アップシフト手段と、を備え、勾配路アップシフト手段は、車両が勾配路を走行中であっても、スルー変速比が変化しないようにバリエータの変速比を副変速機構の変速比の変化に対応して変化させながら副変速機構の変速を実行することを特徴とする。
【発明の効果】
【0011】
本発明によると、車両が勾配路を走行して副変速機構のアップシフトが禁止された状態であっても、所定の走行状態での走行時では、スルー変速比が変化しないように副変速機構をアップシフトさせるので、バリエータをよりLow側の変速比とすることができ、車両の駆動力を確保しつつ、勾配路での停車時におけるバリエータのLow戻り性を向上させるので、運転性の悪化を防止することができる。
【図面の簡単な説明】
【0012】
【図1】本実施形態の無段変速機を搭載した車両の概略構成図である。
【図2】本発明の実施形態の変速機コントローラの構成の一例を示す説明図である。
【図3】本発明の実施形態の変速マップの一例を示す説明図である。
【図4】本発明の実施形態の勾配路走行時の変速制御のフローチャートである。
【図5】本発明の実施形態の本実施形態の勾配路における変速制御を示す説明図である
【図6】本発明の実施形態の目標到達プライマリ回転速度の上昇を行うマップの一例を示す説明図である。
【発明を実施するための形態】
【0013】
以下、添付図面を参照しながら本発明の実施形態について説明する。なお、以下の説明において、ある変速機構の「変速比」は、当該変速機構の入力回転速度を当該変速機構の出力回転速度で割って得られる値である。また、「最Low変速比」は当該変速機構の最大変速比を意味し、「最High変速比」は当該変速機構の最小変速比を意味する。
【0014】
図1は本実施形態の無段変速機を搭載した車両の概略構成図である。この車両は動力源としてエンジン1を備える。エンジン1の出力回転は、ロックアップクラッチ付きトルクコンバータ2、第1ギヤ列3、無段変速機(以下、単に「変速機4」という。)、第2ギヤ列5、終減速装置6を介して駆動輪7へと伝達される。第2ギヤ列5には駐車時に変速機4の出力軸を機械的に回転不能にロックするパーキング機構8が設けられている。
【0015】
また、車両には、エンジン1の動力の一部を利用して駆動されるオイルポンプ10と、オイルポンプ10からの油圧を調圧して変速機4の各部位に供給する油圧制御回路11と、油圧制御回路11を制御する変速機コントローラ12とが設けられている。
【0016】
各構成について説明すると、変速機4は、無段変速機構(以下、「バリエータ20」という。)と、バリエータ20に対して直列に設けられる副変速機構30とを備える。「直列に設けられる」とは同動力伝達経路においてバリエータ20と副変速機構30が直列に設けられるという意味である。副変速機構30は、この例のようにバリエータ20の出力軸に直接接続されていてもよいし、その他の変速ないし動力伝達機構(例えば、ギヤ列)を介して接続されていてもよい。
【0017】
バリエータ20は、プライマリプーリ21と、セカンダリプーリ22と、プーリ21、22の間に掛け回されるVベルト23とを備えるベルト式無段変速機構である。プーリ21、22は、それぞれ固定円錐板と、この固定円錐板に対してシーブ面を対向させた状態で配置され固定円錐板との間にV溝を形成する可動円錐板と、この可動円錐板の背面に設けられて可動円錐板を軸方向に変位させる油圧シリンダ23a、23bとを備える。油圧シリンダ23a、23bに供給される油圧を調整すると、V溝の幅が変化してVベルト23と各プーリ21、22との接触半径が変化し、バリエータ20の変速比vRatioが無段階に変化する。
【0018】
副変速機構30は前進2段・後進1段の変速機構である。副変速機構30は、2つの遊星歯車のキャリアを連結したラビニョウ型遊星歯車機構31と、ラビニョウ型遊星歯車機構31を構成する複数の回転要素に接続され、それらの連係状態を変更する複数の摩擦締結要素(Lowブレーキ32、Highクラッチ33、Revブレーキ34)とを備える。各摩擦締結要素32〜34への供給油圧を調整し、各摩擦締結要素32〜34の締結・解放状態を変更すると、副変速機構30の変速段が変更される。例えば、Lowブレーキ32を締結し、Highクラッチ33とRevブレーキ34を解放すれば副変速機構30の変速段は1速となる。Highクラッチ33を締結し、Lowブレーキ32とRevブレーキ34を解放すれば副変速機構30の変速段は1速よりも変速比が小さな2速となる。また、Revブレーキ34を締結し、Lowブレーキ32とHighクラッチ33を解放すれば副変速機構30の変速段は後進となる。なお、以下の説明では、副変速機構30の変速段が1速であるとき「変速機4が低速モードである」と表現し、2速であるとき「変速機4が高速モードである」と表現する。
【0019】
変速機コントローラ12は、図2に示すように、CPU121と、RAM・ROMからなる記憶装置122と、入力インターフェース123と、出力インターフェース124と、これらを相互に接続するバス125とから構成される。
【0020】
入力インターフェース123には、アクセルペダルの開度(以下、「アクセル開度APO」という。)を検出するアクセル開度センサ41の出力信号、変速機4の入力回転速度(=プライマリプーリ21の回転速度、以下、「プライマリ回転速度Npri」という。)を検出する回転速度センサ42の出力信号、車両の走行速度(以下、「車速VSP」という。)を検出する車速センサ43の出力信号、変速機4の油温を検出する油温センサ44の出力信号、セレクトレバー45の位置を検出するインヒビタスイッチ46の出力信号、ブレーキペダルが踏み込まれていることを検出するブレーキスイッチ47の出力信号、車体の進行方向の傾きを検出する勾配センサ50の出力信号などが入力される。
【0021】
記憶装置122には、変速機4の変速制御プログラム、この変速制御プログラムで用いる変速マップ(図3)が格納されている。CPU121は、記憶装置122に格納されている変速制御プログラムを読み出して実行し、入力インターフェース123を介して入力される各種信号に対して各種演算処理を施して変速制御信号を生成し、生成した変速制御信号を出力インターフェース124を介して油圧制御回路11に出力する。CPU121が演算処理で使用する各種値、その演算結果は記憶装置122に適宜格納される。
【0022】
油圧制御回路11は複数の流路、複数の油圧制御弁で構成される。油圧制御回路11は、変速機コントローラ12からの変速制御信号に基づき、複数の油圧制御弁を制御して油圧の供給経路を切り換えるとともにオイルポンプ10で発生した油圧から必要な油圧を調製し、これを変速機4の各部位に供給する。これにより、バリエータ20の変速比vRatio、副変速機構30の変速段が変更され、変速機4の変速が行われる。
【0023】
図3は変速機コントローラ12の記憶装置122に格納される変速マップの一例を示している。
【0024】
この変速マップ上では変速機4の動作点が車速VSPとプライマリ回転速度Npriとに基づき決定される。変速機4の動作点と変速マップ左下隅の零点を結ぶ線の傾きが変速機4の変速比(バリエータ20の変速比vRatioに副変速機構30の変速比subRatioを掛けて得られる全体の変速比、以下、「スルー変速比Ratio」という。)を表している。この変速マップには、従来のベルト式無段変速機の変速マップと同様に、アクセル開度APO毎に変速線が設定されており、変速機4の変速はアクセル開度APOに応じて選択される変速線に従って行われる。なお、図3には簡単のため、全負荷線(アクセル開度APO=8/8のときの変速線)、パーシャル線(アクセル開度APO=4/8のときの変速線)、コースト線(アクセル開度APO=0のときの変速線)のみが示されている。
【0025】
変速機4が低速モードのときは、変速機4はバリエータ20の変速比vRatioを最大にして得られる低速モード最Low線とバリエータ20の変速比vRatioを最小にして得られる低速モード最High線の間で変速することができる。このとき、変速機4の動作点はA領域とB領域内を移動する。一方、変速機4が高速モードのときは、変速機4はバリエータ20の変速比vRatioを最大にして得られる高速モード最Low線とバリエータ20の変速比vRatioを最小にして得られる高速モード最High線の間で変速することができる。このとき、変速機4の動作点はB領域とC領域内を移動する。
【0026】
副変速機構30の各変速段の変速比は、低速モード最High線に対応する変速比(低速モード最High変速比)が高速モード最Low線に対応する変速比(高速モード最Low変速比)よりも小さくなるように設定される。これにより、低速モードでとりうる変速機4のスルー変速比Ratioの範囲である低速モードレシオ範囲と高速モードでとりうる変速機4のスルー変速比Ratioの範囲である高速モードレシオ範囲とが部分的に重複し、変速機4の動作点が高速モード最Low線と低速モード最High線で挟まれるB領域にあるときは、変速機4は低速モード、高速モードのいずれのモードも選択可能になっている。
【0027】
変速機コントローラ12は、この変速マップを参照して、車速VSP及びアクセル開度APO(車両の運転状態)に対応するスルー変速比Ratioを到達スルー変速比DRatioとして設定する。この到達スルー変速比DRatioは、当該運転状態でスルー変速比Ratioが最終的に到達すべき目標値である。そして、変速機コントローラ12は、スルー変速比Ratioを所望の応答特性で到達スルー変速比DRatioに追従させるための過渡的な目標値である目標スルー変速比tRatioを設定し、スルー変速比Ratioが目標スルー変速比tRatioに一致するようにバリエータ20及び副変速機構30を制御する。
【0028】
また、変速マップ上には副変速機構30の変速を行うモード切換変速線(副変速機構30の1−2変速線)が低速モード最High線上に重なるように設定されている。モード切換変速線に対応するスルー変速比(以下、「モード切換変速比mRatio」という。)は低速モード最High変速比に等しい。
【0029】
そして、変速機4の動作点がモード切換変速線を横切った場合、すなわち、変速機4のスルー変速比Ratioがモード切換変速比mRatioを跨いで変化した場合は、変速機コントローラ12はモード切換変速制御を行う。このモード切換変速制御では、変速機コントローラ12は、副変速機構30の変速を行うとともに、バリエータ20の変速比vRatioを副変速機構30の変速比subRatioが変化する方向と逆の方向に変化させる協調変速を行う。
【0030】
協調変速では、変速機4のスルー変速比Ratioがモード切換変速比mRatioよりも大きい状態から小さい状態になったときは、変速機コントローラ12は、副変速機構30の変速段を1速から2速に変更(以下、「1−2変速」という。)するとともに、バリエータ20の変速比vRatioを変速比大側に変化させる。逆に、変速機4のスルー変速比Ratioがモード切換変速比mRatioよりも小さい状態から大きい状態になったときは、変速機コントローラ12は、副変速機構30の変速段を2速から1速に変更(以下、「2−1変速」という。)するとともに、バリエータ20の変速比vRatioを変速比小側に変化させる。
【0031】
モード切換変速時、協調変速を行うのは、変速機4のスルー変速比Ratioの段差により生じる入力回転の変化に伴う運転者の違和感を抑えるためである。また、モード切換変速をバリエータ20の変速比vRatioが最High変速比のときに行うのは、この状態では副変速機構30に入力されるトルクがそのときにバリエータ20に入力されるトルクのもとでは最小になっており、この状態で副変速機構30を変速すれば副変速機構30の変速ショックを緩和することができるからである。
【0032】
また、この変速マップに従えば、車両が停車する際、バリエータ20の変速比vRatioは最Low変速比となり、また、副変速機構30の変速段は1速となる。
【0033】
次に、車両が勾配路を走行時の制御を説明する。
【0034】
変速機コントローラ12は、車両が登坂路などの勾配路を走行中である場合に、副変速機構30をLowモードからHighモードへと禁止する勾配路アップシフト禁止制御を行う。
【0035】
具体的には、変速機コントローラ12は、勾配センサ50から取得した信号によって走行中の路面の勾配を取得する。なお、路面の勾配は、勾配センサ50のみによって取得してもよいし、現在のスルー変速比Ratioから予測される車速と実際の車速VSPとを比較して路面勾配を推定してもよい。これら両者の組み合わせによって路面の勾配を推定してもよい。
【0036】
変速機コントローラ12は、取得した路面の勾配が0よりも大きく、車両が勾配路を走行中であると判定した場合は、副変速機構30のアップシフトを禁止する。具体的には、副変速機構30がLowモードである場合には、Highモードへの変速を禁止する。副変速機構30をよりLow側で使用することによって、副変速機構30がHigh側である場合と比較してエンジン1のトルクを上昇させやすくして、勾配路における駆動力を確保することができる。
【0037】
一方で、勾配路を走行時に副変速機構30のアップシフトを禁止し、Lowモードで走行中の場合であって、現在の変速点がB領域での走行中の場合のバリエータ20の変速比は、副変速機構30がHighモードである場合と比較して変速比がHigh側となっている。
【0038】
このような状態で車両がコースト状態から停車に至る場合は、バリエータ20が最Lowへと変速するLow戻り性が悪化し、最Lowに至る前に停車する可能性がある。バリエータ20が最Lowとならない場合はその後の再発進時の駆動力が低下するという問題が発生する。特に、勾配路では平坦路の減速時に比べて車両の減速度が大きくなり、車両停止までの時間が短くなるため、バリエータのLow戻り性が悪化する。
【0039】
このような状況からの再発進時においては、発進時の駆動力の不足に伴って運転者がアクセルを踏み増しすることによって、燃料消費量の悪化が懸念される。
【0040】
そこで、勾配路を走行中であって、所定の走行状態での走行中の場合には、バリエータ20の変速比をLow側の変速比としてLow戻り性の悪化を抑制することが望ましい。
【0041】
本実施形態では、次のような勾配路アップシフト制御を実行することによって、勾配路を走行時のバリエータ20のLow戻り性の悪化を抑制して、車両が勾配路で急停車してからの再発進時であっても発進時の駆動力を確保することができるように構成した。
【0042】
図4は、本実施形態の変速機コントローラ12が実行する、勾配路を走行時の勾配路アップシフト制御のフローチャートである。なお、本フローチャートの処理は変速機コントローラ12において所定間隔(例えば10ms)で実行される。
【0043】
変速機コントローラ12は、現在の車両の状態(車速VSP、プライマリ回転速度Npri等)から変速比を決定するために、まず到達目標プライマリ回転速度を算出する(S101)。到達目標プライマリ回転速度は、図3の変速マップにおける現在の変速点からの目標値となる変速点に対応するプライマリ回転速度Npriである。プライマリ回転速度Npriは、トルクコンバータ2がロックアップ状態である場合は、エンジン1の回転速度とほぼ等しい。
【0044】
次に、算出した到達目標プライマリ回転速度に基づいて、変速機4の到達スルー変速比DRatioを決定する(S102)。
【0045】
次に、変速機コントローラ12は、勾配センサ50等から取得した走行中の路面の勾配から勾配路か否かを判定して、勾配路であった場合に副変速機構30のアップシフトを禁止するか否かを判定する(S103)。勾配路でなく副変速機構30のアップシフトを許容する状態である場合には、本フローチャートによる処理を終了する。
【0046】
勾配路であって副変速機構30のアップシフトを禁止すると判定した場合は、ステップS104に移行して、変速機コントローラ12は、勾配路が急勾配路であるか否かを判定する(S104)。勾配路が急勾配路であると判定した場合は、副変速機構30のアップシフトの規制を維持したまま、本フローチャートによる処理を終了する。なお、急勾配路であるか否かは、勾配センサ50の検出精度にもよるが、例えば15%以上であるときに急勾配路と判定する。
【0047】
急勾配路でないと判定した場合は、変速機コントローラ12は、車両が所定の走行状態であるか否かを、ステップS105からS107の条件から判定し、所定の走行状態である場合に副変速機構30のアップシフトを許容する。
【0048】
まず、ステップS105に移行して、副変速機構30がアップシフト可能であるか否かを判定する。副変速機構30が既にHighモードである場合や、図3の変速マップによりHighモードにアップシフト不可能な領域である場合はステップS110に移行する
。なお、アップシフト不可能な領域とは、例えば図3の変速マップにおいて現在の変速点がA領域にある場合である。
【0049】
副変速機構30がLowモードであってアップシフト可能な領域(例えばB領域)である場合は、ステップS106に移行して、変速機コントローラ12は、現在の運転状態がコースト状態であるか否かを判定する。コースト状態でないと判定した場合はステップS110に移行する。運転状態がコースト状態であると判定した場合は、ステップS107に移行する。
【0050】
現在の運転状態がコースト状態であると判定した場合は、ステップ107に移行して。変速機コントローラ12は、現在車両が減速中であるか否かを判定する。車両が減速中でないと判定した場合はステップS110に移行する。車両が減速中であると判定した場合はステップS108に移行する。すなわち、勾配路を走行中であって、車両の状態がコースト状態であり、かつ、減速中である場合は、副変速機構30のアップシフトを実行する。
【0051】
このとき、変速機コントローラ12は、副変速機構30をLowモードからHighモードにアップシフトを行うと共に、バリエータ20の変速比を副変速機構30の変速比の変化とは逆の方向に変化させる協調変速を行う。協調変速によってアップシフト開始前と終了後とで変速機4のスルー変速比Ratioは変化しない。副変速機構30の変速比がHigh側にとなることにより、バリエータ20の変速比がよりLow側の変速比となる。
【0052】
副変速機構30とバリエータ20とで協調変速を行った後、ステップS109に移行して、変速機コントローラ12は、走行中の路面が急勾配路となったか否かを判定する。急勾配路であると判定した場合はステップS110に移行する。急勾配路でないと判定した場合は、本フローチャートによる制御を終了する。
【0053】
ステップS105において副変速機構30がHighモードにアップシフト可能でない場合、ステップS106において車両の状態がコースト状態でない場合、ステップS107において車両の状態が減速中でない場合、または、ステップS109において副変速機構30をアップシフトさせた後に急勾配路であると判定した場合は、ステップS110に移行する。ステップS110では、変速機コントローラ12は、到達目標プライマリ回転速度を上昇させる制御を行う。なお、本実施形態では、図5で説明するように、一例としてエンジン1の最低回転速度に基づいて予め設定されているコースト線をエンジン1の回速度が大側となる側に補正する。コースト線が上昇することによって、到達目標プライマリ回転速度が上昇する。
【0054】
このステップS110の処理の後、本フローチャートによる処理を終了する。以降は、補正されたコースト線に基づいて到達目標プライマリ回転速度を設定し、到達目標プライマリ回転速度に基づいて変速機4の到達スルー変速比DRatioを決定し、決定された到達スルー変速比DRatioにスルー変速比Ratioを所望の応答特性で追従させるように、変速機4の変速比を制御する。
【0055】
図5は、本実施形態の勾配路における変速制御を示す説明図である。
【0056】
なお、ここでは、車両がコースト線に沿って減速中である場合における変速制御を示す。なお、コースト状態とは、アクセルペダルが離されてアクセル開度APOが0で、ブレーキスイッチ47によって運転者によりブレーキペダルが踏まれていることを検出した状態である。
【0057】
コースト状態においては、車両は図5の矢印(a)に示すように、エンジン1の最低回転速度等に基づいて予め決定されているコースト線に沿って変速点が減速側に移動する。
【0058】
ここで、勾配路であり副変速機構30のアップシフトを禁止した状態で、急勾配路であることを判定し(ステップS104でYes)、副変速機構30がLowモードであってアップシフト可能である場合(ステップS105でYes)は、車両の状態がコースト状態であり(ステップS106でYes)かつ減速中である場合(ステップS107でYes)は、ステップS108において、副変速機構30をLowモードからHighモードへとアップシフトさせる(矢印(1))。
【0059】
副変速機構30のアップシフトによって、バリエータ20の変速比がLow側の変速比へと変化する。これにより、平坦路に比べて停車までの時間が短い勾配路において、車両が停止に至ったとしてもバリエータ20がLow側に変速比であるので、素早く最Lowへと移行することができ、Low戻り性の悪化を防止して、車両の再発進性を確保することができる。
【0060】
なお、このときの運転状態は、副変速機構30が低速モード最High線と高速モード最Low線との間の領域において制御される。
【0061】
副変速機構30をアップシフトさせた後、路面が急勾配であると判定した場合は(ステップS109でYes)、図4のステップS110で説明したように、コースト線を大側に補正する(矢印(2))。
【0062】
コースト線を大側に補正することによって、目標到達プライマリ回転速度の下限を上昇させ、エンジン1の最低回転速度を大側に補正するので、急勾配路のコースト運転中であっても、バリエータの変速比をLow側に補正することで、停車時であってもバリエータのLow戻り性の悪化を防止し、再発進性を確保する。
【0063】
なお、コースト線を大側に補正する場合は、変速機コントローラ12は、車両の運転状態に基づいて、どの程度大側に補正するかを決定する。
【0064】
図6は、本実施形態の変速機コントローラ12による目標到達プライマリ回転速度の上昇を行うためのマップの一例を示す説明図である。
【0065】
前述したように、変速機コントローラ12は、車両が勾配路を走行中であり、かつ路面が急勾配路である場合に、エンジン1の回転速度を上昇させて駆動力を確保するために、目標到達プライマリ回転速度を上昇させる。
【0066】
このとき、車速VSPが大きい場合はエンジン1の回転速度もそれに対応して大きいため、大きな補正は必要なく、また、補正量を大きくするとエンジン1の回転速度が吹け上がりオーバーレブとなる可能性がある。一方で、勾配路では車速が低いと減速によって停車に至りやすい。そのため、車速が小さいほど補正量を大きく補正する。
【0067】
また、勾配路の勾配が急勾配であれば停車までの時間がより短くなるので、勾配が急であるほど補正量を大きくする。
【0068】
このように、変速機コントローラ12は、車速が低いほど、勾配が急であるほど、到達目標プライマリ回転速度の補正量を大きく設定する。設定されたマップは、変速機コントローラ12の記憶装置122に予め記憶しておく。
【0069】
以上のように、本発明の実施形態では、無段変速機構(バリエータ)20と複数の変速段を有する副変速機構30とからなり、変速領域を拡大できる無段変速機において、通常は勾配路を走行中には副変速機構20のアップシフトが禁止されるが、所定の走行状態、すなわち、勾配路を走行中であり、かつ、コースト状態で減速している場合には、副変速機構のアップシフトを許容する。
【0070】
このとき、副変速機構30とバリエータ20とでスルー変速比Ratioが変化しないように協調変速を行うので、結果としてバリエータ20の変速比がLow側の変速比となる。これにより、バリエータ20のLow戻り性の悪化が抑制されるので、急勾配路を走行中に停車に至った場合にも、バリエータ20がLow側の変速比となり、車両の再発進性が確保されて運転性の悪化を防止することができる。これらの効果は請求項1、3及び5に対応する。
【0071】
また、急勾配路を走行中は、目標到達プライマリ回転速度(エンジン回転速度)をの下限値(コースト線)を上昇させるように補正することによって、エンジン1の回転速度の下限値を上昇させることで、急勾配路のコースト走行中であっても、バリエータのLow戻り性の悪化を防止し、停車時からの再発進性を確保することができるので、運転性の悪化を防止することができる。
【0072】
また、このエンジン1の回転速度の補正は、車速VSPが小さいほど、勾配が急であるほど、大きく補正することにより、車両の状態及び路面の状態に応じて、適切に駆動力を確保することができる。これらの効果は請求項2及び4に対応する。
【0073】
以上、本発明の実施形態について説明したが、上記実施形態は本発明の適用例の一つを示したものに過ぎず、本発明の技術的範囲を上記実施形態の具体的構成に限定する趣旨ではない。
【0074】
例えば、上記実施形態では、バリエータ20としてベルト式無段変速機構を備えているが、バリエータ20は、Vベルト23の代わりにチェーンがプーリ21、22の間に掛け回される無段変速機構であってもよい。あるいは、バリエータ20は、入力ディスクと出力ディスクの間に傾転可能なパワーローラを配置するトロイダル式無段変速機構であってもよい。
【0075】
また、上記実施形態では、副変速機構30は前進用の変速段として1速と2速の2段を有する変速機構としたが、副変速機構30を前進用の変速段として3段以上の変速段を有する変速機構としても構わない。
【0076】
また、副変速機構30をラビニョウ型遊星歯車機構を用いて構成したが、このような構成に限定されない。例えば、副変速機構30は、通常の遊星歯車機構と摩擦締結要素を組み合わせて構成してもよいし、あるいは、ギヤ比の異なる複数の歯車列で構成される複数の動力伝達経路と、これら動力伝達経路を切り換える摩擦締結要素とによって構成してもよい。
【0077】
また、プーリ21、22の可動円錐板を軸方向に変位させるアクチュエータとして油圧シリンダ23a、23bを備えているが、アクチュエータは油圧で駆動されるものに限らず電気的に駆動されるものあってもよい。
【符号の説明】
【0078】
1 エンジン
4 無段変速機
11 油圧制御回路
12 変速機コントローラ
20 バリエータ(無段変速機構)
21 プライマリプーリ
22 セカンダリプーリ
23 Vベルト
30 副変速機構
50 勾配センサ
【特許請求の範囲】
【請求項1】
車両に搭載され、エンジンの回転速度を変速する無段変速機であって、
変速比を無段階に変更することができるバリエータと、
前記バリエータに対して直列に備えられ、複数の摩擦要素の締結及び解放によって低速側の第1変速段と高速側の第2変速段とを切り替え可能な有段の副変速機構と、
前記車両の運転状態に基づいて前記エンジン目標到回転速度を算出し、前記算出した目標回転速度に基づいて目標変速比としての到達スルー変速比を設定し、前記バリエータの変速比及び前記副変速機構の変速段の少なくとも一方を変更して、前記バリエータ及び前記副変速機構の全体の変速比であるスルー変速比を所定の応答で前記到達スルー変速比に追従させる変速制御部と、
を備え、
前記変速制御部は、車両が勾配路を走行している場合に、前記副変速機構のアップシフトを禁止する勾配路アップシフト禁止手段と、
前記勾配路アップシフト禁止手段により前記副変速機構のアップシフトが禁止されているときに、前記車両が所定の走行状態で走行している場合は、前記副変速機構をアップシフトさせる勾配路アップシフト手段と、を備え、
前記勾配路アップシフト手段は、車両が勾配路を走行中であっても、前記スルー変速比が変化しないように前記バリエータの変速比を前記副変速機構の変速比の変化に対応して変化させながら前記副変速機構の変速を実行することを特徴とする無段変速機。
【請求項2】
前記所定の走行状態は、前記スルー変速比が、前記副変速機構が低速側の第1変速段でかつ前記バリエータの変速比が最小の第1変速段と、前記副変速機構が高速側の第2段でかつ前記バリエータの変速比が最大の第2変速段との間であることを特徴とする請求項1に記載の無段変速機。
【請求項3】
前記変速制御部は、前記車両が勾配路を走行している場合であって、かつ、急勾配路を走行している場合に、前記エンジンの目標到達回転速度を大側に補正する目標到達回転速度上昇手段を備えることを特徴とする請求項1又は2に記載の無段変速機。
【請求項4】
前記勾配路アップシフト手段は、前記車両の走行状態が、コースト状態で、かつ、減速中である場合に、前記副変速機構をアップシフトさせることを特徴とする請求項1から3のいずれか一つに記載の無段変速機。
【請求項5】
前記目標回転速度上昇手段は、車速が小さいほど、勾配路の勾配が大きいほど、前記エンジンの目標到達回転速度を、より大側に補正することを特徴とする請求項3又は4に記載の無段変速機。
【請求項6】
変速比を無段階に変更することができるバリエータと、バリエータに対して直列に備えられ、複数の摩擦要素の締結及び解放によって変速比が切り替え可能な有段の副変速機構と、を備え、車両に搭載され、動力源の出力回転を変速して出力する無段変速機の変速制御方法であって、
前記車両の運転状態に基づいて前記エンジン目標到回転速度を算出し、前記算出した目標回転速度に基づいて目標変速比としての到達スルー変速比を設定し、バリエータの変速比及び副変速機構の変速段の少なくとも一方を変更して、バリエータ及び副変速機構の全体の変速比であるスルー変速比を所定の応答で到達スルー変速比に追従させ、
車両が勾配路を走行して前記副変速機構のアップシフトが禁止された場合において、車両が所定の走行領域で走行している場合は、前記スルー変速比が変化しないように前記バリエータの変速比を前記副変速機構の変速比の変化に対応して変化させながら前記副変速機構のアップシフトを実行することを特徴とする無段変速機の変速制御方法。
【請求項1】
車両に搭載され、エンジンの回転速度を変速する無段変速機であって、
変速比を無段階に変更することができるバリエータと、
前記バリエータに対して直列に備えられ、複数の摩擦要素の締結及び解放によって低速側の第1変速段と高速側の第2変速段とを切り替え可能な有段の副変速機構と、
前記車両の運転状態に基づいて前記エンジン目標到回転速度を算出し、前記算出した目標回転速度に基づいて目標変速比としての到達スルー変速比を設定し、前記バリエータの変速比及び前記副変速機構の変速段の少なくとも一方を変更して、前記バリエータ及び前記副変速機構の全体の変速比であるスルー変速比を所定の応答で前記到達スルー変速比に追従させる変速制御部と、
を備え、
前記変速制御部は、車両が勾配路を走行している場合に、前記副変速機構のアップシフトを禁止する勾配路アップシフト禁止手段と、
前記勾配路アップシフト禁止手段により前記副変速機構のアップシフトが禁止されているときに、前記車両が所定の走行状態で走行している場合は、前記副変速機構をアップシフトさせる勾配路アップシフト手段と、を備え、
前記勾配路アップシフト手段は、車両が勾配路を走行中であっても、前記スルー変速比が変化しないように前記バリエータの変速比を前記副変速機構の変速比の変化に対応して変化させながら前記副変速機構の変速を実行することを特徴とする無段変速機。
【請求項2】
前記所定の走行状態は、前記スルー変速比が、前記副変速機構が低速側の第1変速段でかつ前記バリエータの変速比が最小の第1変速段と、前記副変速機構が高速側の第2段でかつ前記バリエータの変速比が最大の第2変速段との間であることを特徴とする請求項1に記載の無段変速機。
【請求項3】
前記変速制御部は、前記車両が勾配路を走行している場合であって、かつ、急勾配路を走行している場合に、前記エンジンの目標到達回転速度を大側に補正する目標到達回転速度上昇手段を備えることを特徴とする請求項1又は2に記載の無段変速機。
【請求項4】
前記勾配路アップシフト手段は、前記車両の走行状態が、コースト状態で、かつ、減速中である場合に、前記副変速機構をアップシフトさせることを特徴とする請求項1から3のいずれか一つに記載の無段変速機。
【請求項5】
前記目標回転速度上昇手段は、車速が小さいほど、勾配路の勾配が大きいほど、前記エンジンの目標到達回転速度を、より大側に補正することを特徴とする請求項3又は4に記載の無段変速機。
【請求項6】
変速比を無段階に変更することができるバリエータと、バリエータに対して直列に備えられ、複数の摩擦要素の締結及び解放によって変速比が切り替え可能な有段の副変速機構と、を備え、車両に搭載され、動力源の出力回転を変速して出力する無段変速機の変速制御方法であって、
前記車両の運転状態に基づいて前記エンジン目標到回転速度を算出し、前記算出した目標回転速度に基づいて目標変速比としての到達スルー変速比を設定し、バリエータの変速比及び副変速機構の変速段の少なくとも一方を変更して、バリエータ及び副変速機構の全体の変速比であるスルー変速比を所定の応答で到達スルー変速比に追従させ、
車両が勾配路を走行して前記副変速機構のアップシフトが禁止された場合において、車両が所定の走行領域で走行している場合は、前記スルー変速比が変化しないように前記バリエータの変速比を前記副変速機構の変速比の変化に対応して変化させながら前記副変速機構のアップシフトを実行することを特徴とする無段変速機の変速制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】

【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−77794(P2012−77794A)
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願番号】特願2010−221535(P2010−221535)
【出願日】平成22年9月30日(2010.9.30)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
【公開日】平成24年4月19日(2012.4.19)
【国際特許分類】
【出願日】平成22年9月30日(2010.9.30)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
[ Back to top ]