
無段変速機構及び自動車用駆動システム
【課題】変速比を維持するためのアクチュエータの消費電力の低減を図る。
【解決手段】第1リンクLn1を固定節、第2リンLn2クを原動節、第3リンクLn3を従動節とする複数の4節リンク機構の組み合わせとして構成される。固定長の第5、第6リンクLn5、Ln6の動きにより、第2リンクLn2の長さ(偏心量)を調節して第4リンクLn4の揺動角度を変え、それにより、第2リンクLn2の回転運動を第4リンクの揺動運動を介してワンウェイ・クラッチにより回転運動に変換する際の変速比を調節する。制御手段5は、第2リンクLn2の入力回転方向において、第5、第6リンクLn5、Ln6の連結点Oxが第2リンクLn2に相当する線よりも後側に位置するように、第5リンクLn5と第6リンクLn6にアクチュエータにより回転トルクを与えて第2リンクLn2の長さを調節する。
【解決手段】第1リンクLn1を固定節、第2リンLn2クを原動節、第3リンクLn3を従動節とする複数の4節リンク機構の組み合わせとして構成される。固定長の第5、第6リンクLn5、Ln6の動きにより、第2リンクLn2の長さ(偏心量)を調節して第4リンクLn4の揺動角度を変え、それにより、第2リンクLn2の回転運動を第4リンクの揺動運動を介してワンウェイ・クラッチにより回転運動に変換する際の変速比を調節する。制御手段5は、第2リンクLn2の入力回転方向において、第5、第6リンクLn5、Ln6の連結点Oxが第2リンクLn2に相当する線よりも後側に位置するように、第5リンクLn5と第6リンクLn6にアクチュエータにより回転トルクを与えて第2リンクLn2の長さを調節する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、4つの節(リンク)と4つの回転対偶からなり、1つの節を原動節、その対辺をなす節を従動節として、回転運動を揺動運転に変換する4節リンク機構式の無段変速機構及び自動車用駆動システムに関するものである。
【背景技術】
【0002】
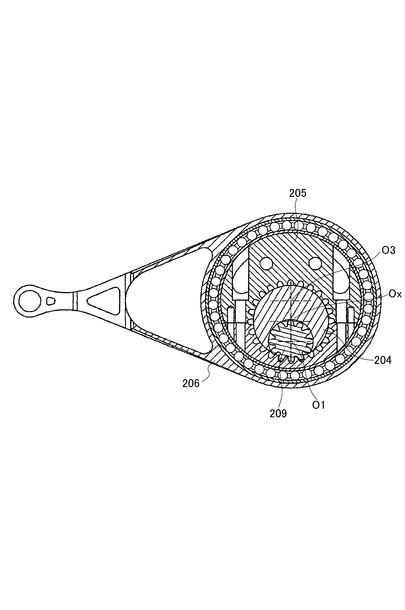
従来のこの種の無段変速機構として、エンジンの出力軸の回転運動を揺動運動に変換し、更に揺動運動を回転運動に変換して出力する方式のものが知られている(例えば、特許文献1参照)。特許文献1に記載の回転運動を揺動運動に変換する機構は、図20に示すように、アクチュエータによって駆動されるピニオン209と、このピニオン209の歯に噛み合う内歯を有する偏心ディスク205と、ピニオン209及び偏心ディスク205の相互位置関係を保つための内側ディスク204とを備えている。
【0003】
ピニオン209の自転中心は、図示略のエンジンの出力軸の中心つまり無段変速機構の入力軸の中心軸線(以下、入力中心軸線という)O1上に位置し、ピニオン209の公転中心は、無段変速機構の入力軸と一体回転する内側ディスク204の中心Oxに位置している(実際には、ピニオン209は位置が固定されていて公転しないため、内側ディスク204の中心Oxがピニオン209に対して公転する関係にある)。この場合、内側ディスク204の半径はピニオン209の直径に等しく、ピニオン209の公転半径はピニオン209の半径に等しい。また、偏心ディスク205の中心O3と内側ディスク204の中心Ox間の距離は、ピニオン209の半径に等しい。そして、内側ディスク204の回転に伴って偏心ディスク205の中心O3が、入力中心軸線O1を中心にして回転することにより、偏心ディスク205が入力中心軸線O1の周りを偏心回転し、それにより偏心ディスク205に回転自在に連結されたコンロッド(連結部材)206が揺動運動するようになっている。
【0004】
このように偏心ディスク205が偏心回転するときの偏心量は、点O1と点O3との距離であり、点Oxと点O3の距離が一定(ピニオン209の半径)且つ点Oxと点O1の距離が一定(ピニオン209の半径)であることから、内側ディスク204の中心Oxの位置が、点O1と点O3を結ぶ線に対してどの位置にあるかで、点O1と点O3の距離つまりは偏心量が決定されるようになっている。
【0005】
そこで、偏心量を変化させる場合は、アクチュエータによってピニオン209を偏心ディスク205に対して相対回転させ、歯の噛み合いの進行によって内側ディスク204を偏心ディスク205に対して相対回転させる。そうすると、点O1と点O3と点Oxの位置関係が変化し、点O1と点O3の距離つまり偏心量が変化する。従って、ピニオン209の回転により、ピニオン209と偏心ディスク205との偏心量を変えることができ、それによって変速比を変化させることができる。また、偏心量を変えずに一定の偏心量を維持する場合でも、コンロッド206に作用する力によってピニオン209に負荷トルクが加わりピニオン209を回転させようとするので、その力の大きさによって(ピニオンを保持し得る摩擦力を超える場合)は、定位置にピニオン209を保持するための保持トルクをアクチュエータによって加えておかなくてはならない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】独国特許発明第102009039993号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、ピニオン209の回転は、上述したように図示しないアクチュエータを使用することにより行われるが、さらなるエネルギー効率の向上及びアクチュエータの小型化を図るためには、ピニオンに加えるトルクを低減させることが課題となっている。
【0008】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、偏心量を維持するため、あるいは、偏心量を変化させるためのアクチュエータの消費電力の低減を図り、エネルギー効率の向上を図ることのできる無段変速機構及び自動車用駆動システムを提供することにある。
【課題を解決するための手段】
【0009】
前述した目的を達成するために、請求項1に係る発明は、原動機(例えば、後述の実施形態におけるENG1、ENG2)からの回転動力を受けることで入力中心軸線(例えば、後述の実施形態における入力中心軸線O1)の周りを回転する入力軸(例えば、後述の実施形態における入力軸101)と、
前記入力中心軸線の周囲に周方向に等間隔に設けられると共に前記入力中心軸線に対する偏心量(例えば、後述の実施形態における偏心量r1)を同期して変更可能な第1支点(例えば、後述の実施形態における第1支点O3)をそれぞれの中心に有し、前記偏心量を保ちつつ前記入力中心軸線の周りに前記入力軸と共に回転する複数の偏心ディスク(例えば、後述の実施形態における偏心ディスク104)と、
前記入力中心軸線から離れた出力中心軸線(例えば、後述の実施形態における出力中心軸線O2)の周りを回転する出力部材(例えば、後述の実施形態における出力部材121)と、外部から回転方向の動力を受けることで前記出力中心軸線の周りを揺動する入力部材(例えば、後述の実施形態における入力部材122)と、これら入力部材および出力部材を互いにロック状態または非ロック状態にする係合部材(例えば、後述の実施形態におけるローラ123)とを有し、前記入力部材の正方向の回転速度が前記出力部材の正方向の回転速度を上回ったとき、前記入力部材に入力された回転動力を前記出力部材に伝達し、それにより前記入力部材の揺動運動を前記出力部材の回転運動に変換するワンウェイ・クラッチ(例えば、後述の実施形態におけるワンウェイ・クラッチ120)と、
それぞれ一端が前記各偏心ディスクの外周に前記第1支点を中心に回転自在に連結され、他端が前記ワンウェイ・クラッチの入力部材上の前記出力中心軸線から離間した位置に設けられた第2支点(例えば、後述の実施形態における第2支点O4)に回動自在に連結されることで、前記入力軸から前記偏心ディスクに与えられる回転運動を、前記ワンウェイ・クラッチの入力部材に対し該入力部材の揺動運動として伝える複数の連結部材(例えば、後述の実施形態における連結部材130)と、
を備え、
前記入力中心軸線、第1支点、第2支点、出力中心軸線をそれぞれ回転対偶とし、また、前記入力中心軸線と出力中心軸線を結ぶ線分を第1リンク(例えば、後述の実施形態における第1リンクLn1)、前記入力中心軸線と第1支点を結ぶ線分を第2リンク(例えば、後述の実施形態における第2リンクLn2)、前記第1支点と第2支点を結ぶ線分を第3リンク(例えば、後述の実施形態における第3リンクLn3)、前記出力中心軸線と第2支点を結ぶ線分を第4リンク(例えば、後述の実施形態における第4リンクLn4)とし、前記第1リンクを固定節、第2リンクを原動節、第3リンクを従動節とする複数の4節リンク機構の組み合わせとして構成され、
前記偏心ディスクが、前記第1支点を中心にした円板として形成され且つその中心に対して一定の偏心距離だけ中心(例えば、後述の実施形態における中心Ox)を偏倚させた第1円形孔(例えば、後述の実施形態における第1円形孔106)を有すると共に外周に前記連結部材の一端が回転自在に嵌合された外周側円板(例えば、後述の実施形態における外周側円板105)と、前記入力軸と一体回転可能に設けられ且つ前記入力中心軸線に対して前記一定の偏心距離と同じ距離だけ中心を偏倚させた円板として形成されて前記外周側円板の第1円形孔の内周に回転可能に嵌合された内周側円板(例えば、後述の実施形態における内周側円板108)とで構成され、
前記内周側円板に、前記入力中心軸線を中心とすると共に周方向の一部が内周側円板の外周に開口した第2円形孔(例えば、後述の実施形態における第2円形孔109)が設けられ、その第2円形孔の内部に前記入力中心軸線と同軸に回転可能なピニオン(例えば、後述の実施形態におけるピニオン110)が収容され、該ピニオンの歯が、前記第2円形孔の外周の開口を通して前記外周側円板の第1円形孔の内周に形成された内歯歯車(例えば、後述の実施形態における内歯歯車107)に噛み合い、
さらに前記ピニオンには、該ピニオンを前記第2円形孔の内部で回転させることにより、ピニオンの歯と内歯歯車の歯の噛み合いによって前記外周側円板を内周側円板に対して相対回転させ、それにより、前記第2リンクの長さに相当する前記入力中心軸線に対する前記第1支点の偏心量を調節するアクチュエータ(例えば、後述の実施形態におけるアクチュエータ180)が接続され、
これらアクチュエータ、ピニオン、内周側円板、外周側円板の組み合わせにより、前記入力中心軸線に対する第1支点の偏心量を調節して、前記偏心ディスクから前記ワンウェイ・クラッチの入力部材に伝えられる揺動運動の揺動角度(例えば、後述の実施形態における揺動角度θ2)を変更し、それにより前記入力軸に入力される回転動力が前記偏心ディスクおよび前記連結部材を介して前記ワンウェイ・クラッチの出力部材に回転動力として伝達される際の変速比を変更すると共に前記偏心量をゼロに設定することで変速比を無限大に設定可能な変速比可変機構(例えば、後述の実施形態における変速比可変機構112)が構成された無段変速機構(例えば、後述の実施形態における無段・無段変速機構BD、BD1、BD2)であって、
前記原動機の回転方向に応じた前記入力軸の回転方向において、前記ピニオンの公転中心である前記内周側円板の中心が前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更する制御手段(例えば、後述の実施形態における制御手段5)を備えることを特徴とする。
【0010】
請求項2に係る発明は、請求項1の構成において、
前記原動機が正逆回転可能なものであり、前記制御手段が前記原動機の回転方向に応じて、前記ピニオンの公転中心である前記内周側円板の中心が、前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更することを特徴とする。
【0011】
請求項3に係る発明は、請求項1または2に記載の構成において、
前記制御手段は、前記ピニオンの公転中心である前記内周側円板の中心が、前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも前側に位置する場合には、前記偏心量が最大またはゼロであるときに、前記内周側円板の中心が前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更することを特徴とする。
【0012】
請求項4に係る発明は、自動車用駆動システム(例えば、後述の実施形態における自動車用駆動システム1)であって、
原動機(例えば、後述の実施形態におけるENG1、ENG2)と、
請求項1〜3のいずれかに記載の前記無段変速機構と、
前記ワンウェイ・クラッチの出力部材に連結され、該出力部材に伝達された回転動力を駆動車輪(例えば、後述の実施形態における駆動車輪2)に伝える被回転駆動部材(例えば、後述の実施形態における被回転駆動部材11)と、
を備えることを特徴とする。
【発明の効果】
【0013】
請求項1及び4の発明によれば、原動機の回転方向に対してピニオンに加えるトルクの方向が最適化され、連結部材を介して動力を伝達する際、変速比を維持するために必要なピニオンのトルクを低減させることができ、アクチュエータの消費電力の低減を図ることができる。
【0014】
請求項2の発明によれば、原動機の回転方向が変わるような場合であっても、アクチュエータの消費電力を低減することができる。
【0015】
請求項3の発明によれば、適切なタイミングで、原動機の回転方向に対してピニオンに加えるトルクの方向が最適化され、アクチュエータの消費電力を低減することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態の無段変速機構の変速制御装置を含む自動車用駆動システムのスケルトン図である。
【図2】同システムの要部である無限・無段変速機構の具体的な構成を示す断面図である。
【図3】同変速機構の一部の構成を軸線方向から見た側断面図である。
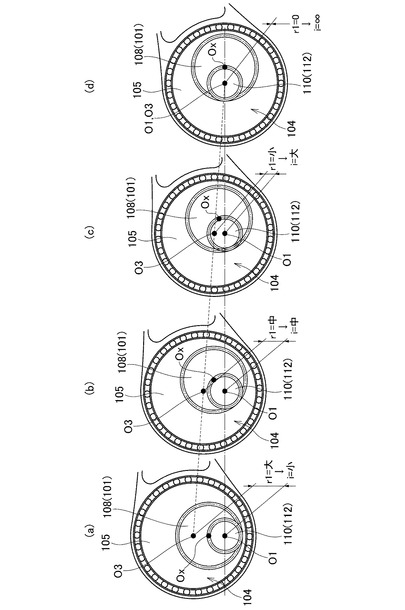
【図4】同変速機構における変速比可変機構による変速原理の前半部分の説明図であり、(a)は偏心ディスク104の中心点である第1支点O3の回転中心である入力中心軸線O1に対する偏心量r1を「大」にして変速比iを「小」に設定した状態を示す図、(b)は偏心量r1を「中」にして変速比iを「中」に設定した状態を示す図、(c)は偏心量r1を「小」にして変速比iを「大」に設定した状態を示す図、(d)は偏心量r1を「ゼロ」にして変速比iを「無限大(∞)」に設定した状態を示す図である。
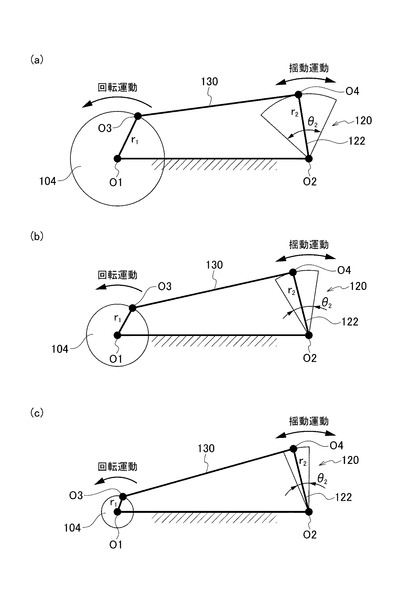
【図5】同変速機構における変速比可変機構による変速原理の後半部分の説明図であって、偏心ディスクの偏心量r1を変更して変速比iを変えた場合のワンウェイ・クラッチ120の入力部材122の揺動角度θ2の変化を示す図であり、(a)は偏心量r1を「大」にし変速比iを「小」にすることで、入力部材122の揺動角度θ2が「大」になった状態を示す図、(b)は偏心量r1を「中」にし変速比iを「中」にすることで、入力部材122の揺動角度θ2が「中」になった状態を示す図、(c)は偏心量r1を「小」にし変速比iを「大」にすることで、入力部材122の揺動角度θ2が「小」になった状態を示す図である。
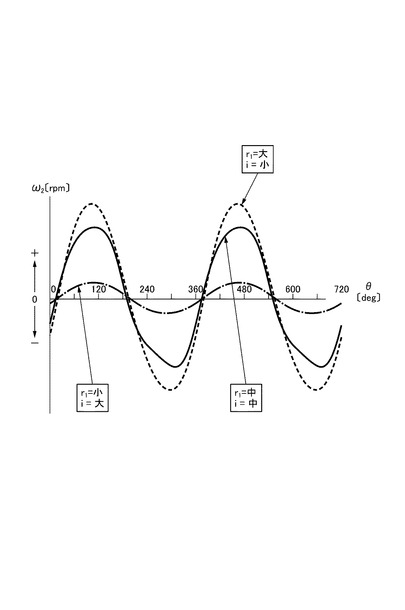
【図6】同変速機構において、入力軸と共に等速回転する偏心ディスクの偏心量r1(変速比i)を「大」、「中」、「小」と変化させた場合の、入力軸の回転角度θとワンウェイ・クラッチの入力部材の角速度ω2の関係を示す図である。
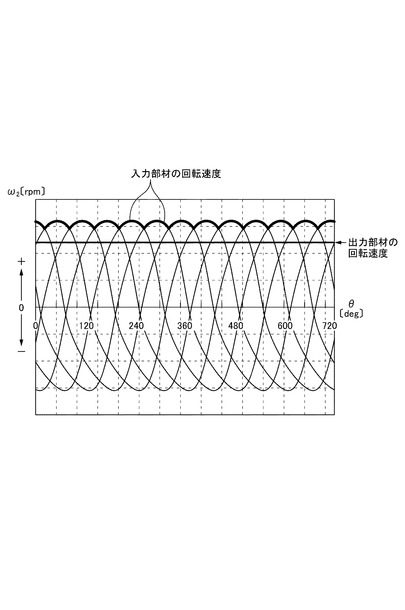
【図7】同変速機構において、複数の連結部材によって入力側(入力軸や偏心ディスク)から出力側(ワンウェイ・クラッチの出力部材)へ動力が伝達される際の出力の取り出し原理を説明するための図である。
【図8】4節リンク機構として構成された前記無限・無段変速機構の駆動力伝達原理の説明図である。
【図9】同4節リンク機構において第2リンクの長さ(偏心量に相当する)を調節するための第5、第6リンクによるリンク機構を追加したモデル図である。
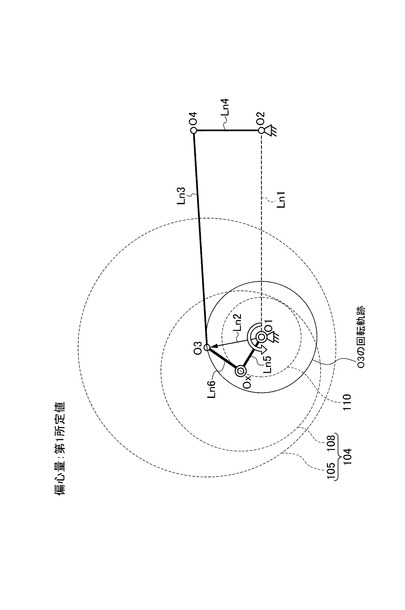
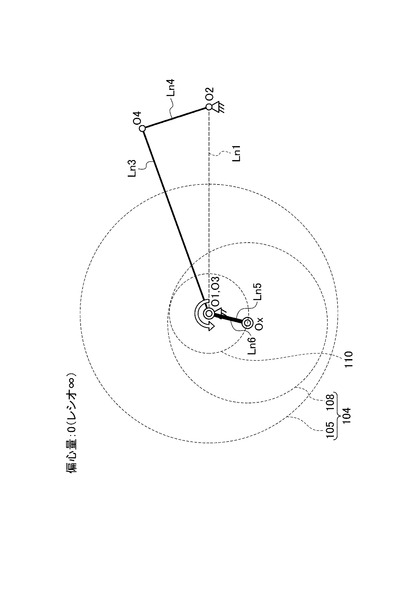
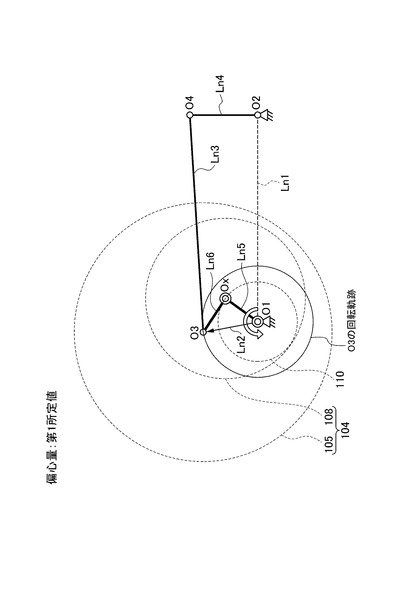
【図10】前記4節リンク機構において第2リンクの長さ(偏心量に相当する)を調節した場合の例を示す図で、(a)は第2リンクの長さ(偏心量に相当する)を最大に調節した場合、(b)は(a)の位置から第5、第6リンクを一定方向に回転させることで第2リンクの長さ(偏心量に相当する)を最大と最小の間の所定の値に調節した場合、(c)は第2リンクの長さ(偏心量に相当する)を最小つまりゼロに調節した場合、(d)は(c)の位置から第5、第6リンクを一定方向に回転させることで第2リンクの長さ(偏心量に相当する)を最大と最小の間の所定の値に調節した場合をそれぞれ示す図である。
【図11】図10(a)に相当するときの前記無限・無段変速機構の各要素の関係を示す図である。
【図12】図10(b)に相当するときの前記無限・無段変速機構の各要素の関係を示す図である。
【図13】図10(c)に相当するときの前記無限・無段変速機構の各要素の関係を示す図である。
【図14】図10(d)に相当するときの前記無限・無段変速機構の各要素の関係を示す図である。
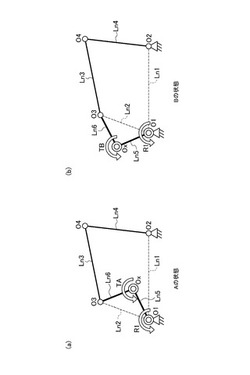
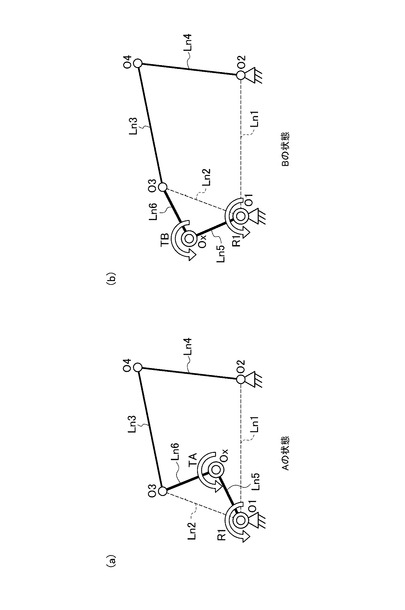
【図15】前記第2のリンクの長さ(偏心量に相当する)を最大と最小の間の所定値に調節する場合、前記第5、第6リンクの配置が2通り考えられるが、(a)は第1の状態であるAの状態にあるときの図、(b)は第2の状態であるBの状態にあるときの図である。
【図16】前記Aの状態とBの状態にあるときの前記第5、第6リンクの連結点Oxに作用するトルクの計算のための説明図で、(a)はAの状態のとき、(b)はBの状態のときの説明図である。
【図17】(a)はエンジンがCCW(反時計方向)回転するときの、Aの状態とBの状態の前記点Oxに作用するトルク(ピニオントルク)の違いを示す特性図、(b)はエンジンがCW(時計方向)回転するときの、Aの状態とBの状態の前記点Oxに作用するトルク(ピニオントルク)の違いを示す特性図である。
【図18】エンジンが正回転(CCW回転)する場合と逆回転(CW回転)する場合の制御の流れを示すフローチャートである。
【図19】(a)はエンジンが正回転(CCW回転)する場合の特性図、(b)はエンジンが逆回転(CW回転)する場合の特性図で、それぞれ上段の図はワンウェイ・クラッチの入力部材(アウターリング)及び出力部材(インナーリング)の速度とワンウェイ・クラッチがトルク伝達するときに連結部材への入力点(第1支点O3)に発生する力Fの関係の時間変化を示す図、中段の図は前記Aの状態のときとBの状態のときの前記点Oxに作用するトルク(ピニオントルク)の計算式の中のsin値の時間変化を示す図、下段の図は前記Aの状態のときとBの状態のときの前記点Oxに作用するトルク(ピニオントルク)の時間変化を示す図である。
【図20】従来の無段変速機構における回転運動を揺動運動に変換する機構を示す断面図である。
【発明を実施するための形態】
【0017】
以下、本発明の一実施形態を図面に基づいて説明する。
図1は本実施形態の無段変速機構の変速制御装置を含む自動車用駆動システムのスケルトン図、図2は同駆動システムの要部である無限・無段変速機構の具体的な構成を示す断面図、図3は同無限・無段変速機構の一部の構成を軸線方向から見た側断面図である。
【0018】
《全体構成》
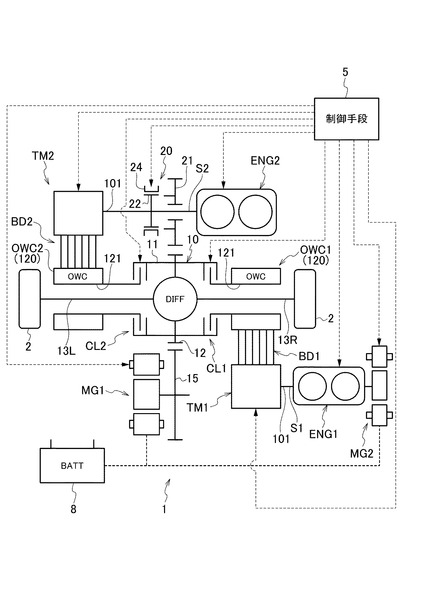
この自動車用駆動システム1は、それぞれ独立して回転動力を発生する第1、第2の2つのエンジン(原動機)ENG1、ENG2と、第1、第2のエンジンENG1、ENG2の各下流側に設けられた第1、第2のトランスミッション(変速機構)TM1、TM2と、各トランスミッションTM1、TM2の出力部に設けられた第1、第2のワンウェイ・クラッチOWC1、OWC2と、これらワンウェイ・クラッチOWC1、OWC2を介して伝達された出力回転を受ける被回転駆動部材11と、この被回転駆動部材11に接続されたメインモータジェネレータ(電動モータ)MG1と、第1のエンジンENG1の出力軸S1に接続されたサブモータジェネレータ(エンジンの始動手段)MG2と、メインおよび/またはサブのモータジェネレータMG1、MG2との間で電力のやりとりが可能なバッテリ(蓄電手段)8と、各種要素を制御することで走行パターンなどの制御を行う制御手段5と、を備えている。
【0019】
図3に示すように、各ワンウェイ・クラッチOWC1、OWC2は、入力部材(クラッチアウタ)122と、出力部材(クラッチインナ)121と、これら入力部材122および出力部材121の間に配されて両部材122、121を互いにロック状態または非ロック状態にする複数のローラ(係合部材)123と、ロック状態を与える方向にローラ123を付勢する付勢部材126とを有する。そして、第1のトランスミッションTM1および第2のトランスミッションTM2からの各回転動力を受ける入力部材122の正方向(矢印RD1方向)の回転速度が、出力部材121の正方向の回転速度を上回ったとき、入力部材122と出力部材121が互いにロック状態になることにより、入力部材122に入力された回転動力が出力部材121に伝達される。
【0020】
第1、第2のワンウェイ・クラッチOWC1、OWC2は、ディファレンシャル装置10を挟んで右と左に配置されており、第1、第2のワンウェイ・クラッチOWC1、OWC2の各出力部材121は、それぞれ別の第1、第2のクラッチ機構CL1、CL2を介して、被回転駆動部材11に共に連結されている。第1、第2のクラッチ機構CL1、CL2は、第1、第2のワンウェイ・クラッチOWC1、OWC2の各出力部材121と被回転駆動部材11との間の動力の伝達/遮断を制御するために設けられている。これらのクラッチ機構CL1、CL2としては、他の種類のクラッチ(摩擦クラッチ等)を使用することもできるが、伝達ロスの低さからドグクラッチが使用されている。
【0021】
被回転駆動部材11は、ディファレンシャル装置10のデフケースにより構成されており、各ワンウェイ・クラッチOWC1、OWC2の出力部材121に伝達された回転動力は、ディファレンシャル装置10および左右のアクスルシャフト13L、13Rを介して、左右の駆動車輪2に伝達される。ディファレンシャル装置10のデフケース(被回転駆動部材11)には、図示しないデフピニオンやサイドギヤが取り付けられており、左右のサイドギヤに左右のアクスルシャフト13L、13Rが連結され、左右のアクスルシャフト13L、13Rは差動回転する。
【0022】
第1、第2の2つのエンジンENG1、ENG2には、高効率運転ポイントの互いに異なるエンジンが用いられており、第1のエンジンENG1は排気量の小さいエンジンとされ、第2のエンジンENG2は、第1のエンジンENG1よりも排気量の大きいエンジンとされている。例えば、第1のエンジンENG1の排気量は500ccとされ、第2のエンジンENG2の排気量は1000ccとされており、合計排気量が1500ccとされている。もちろん、排気量の組み合わせは任意である。
【0023】
メインモータジェネレータMG1と被回転駆動部材11は、メインモータジェネレータMG1の出力軸に取り付けたドライブギヤ15と被回転駆動部材11に設けたドリブンギヤ12とが噛合することにより、動力伝達可能に接続されている。例えば、メインモータジェネレータMG1がモータとして機能するときは、メインモータジェネレータMG1から被回転駆動部材11に駆動力が伝達される。また、メインモータジェネレータMG1を発電機として機能させるときは、被回転駆動部材11からメインモータジェネレータMG1に動力が入力され、機械エネルギーが電気エネルギーに変換される。同時に、メインモータジェネレータMG1から被回転駆動部材11に回生制動力が作用する。
【0024】
また、サブモータジェネレータMG2は、第1のエンジンENG1の出力軸S1に直に接続されており、該出力軸S1との間で動力の相互伝達を行う。この場合も、サブモータジェネレータMG2がモータとして機能するときは、サブモータジェネレータMG2から第1のエンジンENG1の出力軸S1に駆動力が伝達される。また、サブモータジェネレータMG2が発電機として機能するときは、第1のエンジンENG1の出力軸S1からサブモータジェネレータMG2に動力が伝達される。
【0025】
以上の要素を備えたこの駆動システム1では、第1のエンジンENG1および第2のエンジンENG2の発生する回転動力が、第1のトランスミッションTM1および第2のトランスミッションTM2を介して、第1のワンウェイ・クラッチOWC1および第2のワンウェイ・クラッチOWC2に入力され、第1のワンウェイ・クラッチOWC1および第2のワンウェイ・クラッチOWC2を介して、回転動力が被回転駆動部材11に入力される。
【0026】
また、この駆動システム1では、第2のエンジンENG2の出力軸S2と被回転駆動部材11との間に、第2のトランスミッションTM2を介した動力伝達と異なる当該出力軸S2と被回転駆動部材11の間での動力伝達を断接可能なシンクロ機構(スタータ・クラッチとも言われるクラッチ手段)20が設けられている。このシンクロ機構20は、被回転駆動部材11に設けたドリブンギヤ12に常時噛み合うと共に第2のエンジンENG2の出力軸S2の周りに回転自在に設けられた第1ギヤ21と、第2のエンジンENG2の出力軸S2の周りに該出力軸S2と一体に回転するように設けられた第2ギヤ22と、軸方向にスライド操作されることで第1ギヤ21と第2ギヤ22を結合または解除するスリーブ24と、を備えている。即ち、シンクロ機構20は、第2のトランスミッションTM2、クラッチ機構CL2を介した動力伝達経路と異なる動力伝達経路を構成し、この動力伝達経路での動力伝達を断接する。
【0027】
《トランスミッションの構成》
次に、この駆動システム1に用いられている第1、第2の2つのトランスミッションTM1、TM2について説明する。
第1、第2のトランスミッションTM1、TM2は、ほぼ同じ構成の無段変速機構により構成されている。この場合の無段変速機構は、IVT(Infinity Variable Transmission=クラッチを使用せずに変速比を無限大にして出力回転をゼロにできる方式の変速機構)と呼ばれるものの一種であり、変速比(レシオ=i)を無段階に変更できると共に、変速比の最大値を無限大(∞)に設定することのできる、無限・無段変速機構BD(BD1、BD2)により構成されている。
【0028】
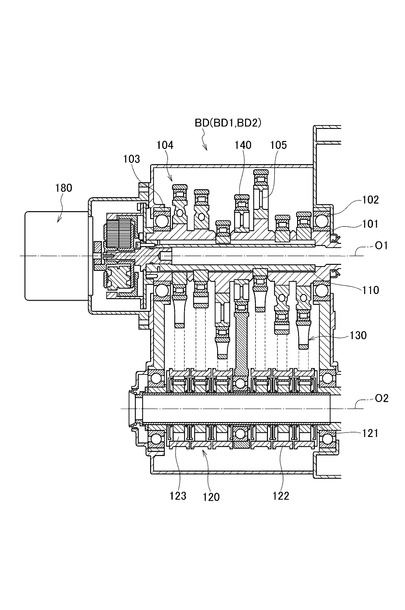
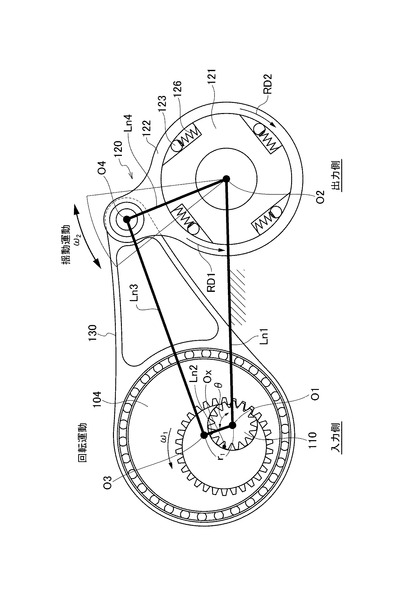
この無限・無段変速機構BDは、図2および図3に構成を示すように、エンジンENG1、ENG2からの回転動力を受けることで入力中心軸線O1の周りを回転する入力軸101と、入力軸101と一体回転する複数の偏心ディスク104と、入力側と出力側を結ぶための偏心ディスク104と同数の連結部材130と、出力側に設けられたワンウェイ・クラッチ120とを備えている。
【0029】
複数の偏心ディスク104は、それぞれ第1支点O3を中心とした円形形状に形成されている。第1支点O3は、入力軸101の周方向に等間隔に設けられると共に、それぞれが、入力中心軸線O1に対する偏心量r1を変更可能で、且つ、該偏心量r1を保ちつつ、入力中心軸線O1の周りに入力軸101と共に回転するように設定されている。従って、複数の偏心ディスク104は、それぞれに偏心量r1を保った状態で、入力中心軸線O1の周りに入力軸101の回転に伴って偏心回転するように設けられている。
【0030】
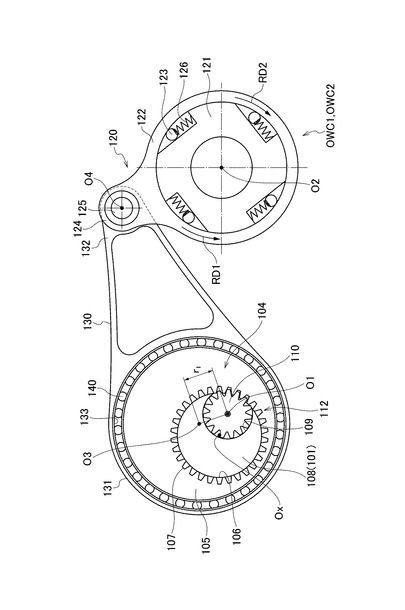
偏心ディスク104は、図3に示すように、外周側円板105と、入力軸101にと一体回転可能に設けられた内周側円板108とで構成されている。内周側円板108は、入力軸101の中心軸線である入力中心軸線O1に対して一定の偏心距離だけ中心Oxを偏倚させた肉厚円板として形成されている。外周側円板105は、第1支点O3を中心にした肉厚円板として形成されており、その中心(第1支点O3)を外れた位置に中心(内周側円板108の中心Oxと一致する点)を持つ第1円形孔106を有している。そして、この第1円形孔106の内周に回転可能に内周側円板108の外周が嵌っている。
【0031】
また、内周側円板108には、入力中心軸線O1を中心とすると共に周方向の一部が内周側円板108の外周に開口した第2円形孔109が設けられており、その第2円形孔109の内部にピニオン110が回転自在に収容されている。ピニオン110の歯は、第2円形孔109の外周の開口を通して、外周側円板105の第1円形孔106の内周に形成した内歯歯車107に噛み合っており、ピニオン110の歯数と内歯歯車107の歯数の比が1:2とされている。
【0032】
このピニオン110は、入力軸101の中心軸線である入力中心軸線O1と同軸に回転するように設けられている。即ち、ピニオン110の回転中心と入力軸101の中心軸線である入力中心軸線O1とが一致している。ピニオン110には、図2に示すように、直流モータ及び減速機構によって構成されるアクチュエータ180が接続されており、このアクチュエータ180によりピニオン110は、第2円形孔109の内部で回転させられる。通常時は、入力軸101の回転と同期させてピニオン110を回転させ、また、同期する回転数を基準として、ピニオン110に入力軸101の回転数を上回るか下回るかする回転数を与えることにより、ピニオン110を入力軸101に対して相対回転させる。
【0033】
例えば、ピニオン110およびアクチュエータ180の出力軸が互いに連結されるように配置し、アクチュエータ180の回転が入力軸101の回転に対して回転差が生じる場合には、その回転差に減速比をかけた分だけ入力軸101とピニオン110の相対角度が変化する減速機構(例えば遊星歯車)を用いることで、ピニオン110を回転させる。この際、アクチュエータ180と入力軸101の回転差がなく同期している場合には偏心量r1は変化しない。
【0034】
従って、ピニオン110を回すことにより、ピニオン110の歯が噛合している内歯歯車107つまり外周側円板105が内周側円板108に対して相対回転し、それにより、ピニオン110の自転中心(入力中心軸線O1)と外周側円板105の中心(第1支点O3)とピニオン110の公転中心Oxの位置関係が変化して、ピニオン110の中心(入力中心軸線O1)と外周側円板105の中心(第1支点O3)との間の距離(つまり偏心ディスク104の偏心量r1)が変化する。
【0035】
この場合、ピニオン110の回転によって、ピニオン110の中心(入力中心軸線O1)に外周側円板105の中心(第1支点O3)を一致させることができるように設定されており、両中心を一致させることにより、偏心ディスク104の偏心量r1を「ゼロ」に設定できる。
【0036】
また、ワンウェイ・クラッチ120は、入力中心軸線O1から離れた出力中心軸線O2の周りを回転する出力部材(クラッチインナ)121と、外部から回転方向の動力を受けることで出力中心軸線O2の周りを揺動するリング状の入力部材(クラッチアウタ)122と、これら入力部材122および出力部材121を互いにロック状態または非ロック状態にするために入力部材122と出力部材121の間に挿入された複数のローラ(係合部材)123と、ロック状態を与える方向にローラ123を付勢する付勢部材126とを有し、入力部材122の正方向(例えば、図3中の矢印RD1で示す方向)の回転速度が出力部材121の正方向の回転速度を上回ったとき、入力部材122に入力された回転動力を出力部材121に伝達し、それにより、入力部材122の揺動運動を出力部材121の回転運動に変換することができるようになっている。
【0037】
図2に示すように、ワンウェイ・クラッチ120の出力部材121は、軸方向に一体に連続した部材として構成されたものであるが、入力部材122は、軸方向に複数に分割されており、偏心ディスク104および連結部材130の数だけ、軸方向に各々独立して揺動できるように配列されている。そして、ローラ123は、入力部材122毎に、入力部材122と出力部材121との間に挿入されている。
【0038】
リング状の各入力部材122上の周方向の1箇所には張り出し部124が設けられており、その張り出し部124に、出力中心軸線O2から離間した第2支点O4が設けられている。そして、各入力部材122の第2支点O4上にピン125が配置され、このピン125によって、連結部材130の先端(他端部)132が入力部材122に回転自在に連結されている。
【0039】
連結部材130は、一端側にリング部131を有し、そのリング部131の円形開口133の内周が、ベアリング140を介して、偏心ディスク104の外周に回転自在に嵌合されている。従って、このように連結部材130の一端が偏心ディスク104の外周に回転自在に連結されると共に、連結部材130の他端が、ワンウェイ・クラッチ120の入力部材122上に設けられた第2支点O4に回動自在に連結されることにより、入力中心軸線O1、第1支点O3、出力中心軸線O2、第2支点O4を回転対偶とする四節リンク機構が構成されており、入力軸101から偏心ディスク104に与えられる回転運動が、ワンウェイ・クラッチ120の入力部材122に対して該入力部材122の揺動運動として伝えられ、その入力部材122の揺動運動が出力部材121の回転運動に変換される。
【0040】
その際、ピニオン110、ピニオン110を収容する第2円形孔109を備えた内周側円板108、内周側円板108を回転可能に収容する第1円形孔106を備えた外周側円板105、アクチュエータ180などにより構成された変速比可変機構112の前記ピニオン110をアクチュエータ180で動かすことにより、偏心ディスク104の偏心量r1を変化させることができる。そして、偏心量r1を変更することで、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を変更することができ、それにより、入力軸101の回転数に対する出力部材121の回転数の比(変速比:レシオi)を変えることができる。即ち、入力中心軸線O1に対する第1支点O3の偏心量r1を調節することで、偏心ディスク104からワンウェイ・クラッチ120の入力部材122に伝えられる揺動運動の揺動角度θ2を変更し、それにより、入力軸101に入力される回転動力が、偏心ディスク104および連結部材130を介してワンウェイ・クラッチ120の出力部材121に回転動力として伝達される際の変速比を変更することができる。
【0041】
この場合、第1、第2のエンジンENG1、ENG2の出力軸S1、S2が、この無限・無段変速機構BD(BD1、BD2)の入力軸101に一体に連結されている。また、無限・無段変速機構BD(BD1、BD2)の構成要素であるワンウェイ・クラッチ120が、第1のトランスミッションTM1および第2のトランスミッションTM2と被回転駆動部材11との間に設けられた前記第1のワンウェイ・クラッチOWC1および第2のワンウェイ・クラッチOWC2をそれぞれに兼ねている。
【0042】
図4及び図5は、無限・無段変速機構BD(BD1、BD2)における変速比可変機構112による変速原理の説明図である。
変速比可変機構112は、図3を用いて前述したアクチュエータ180、ピニオン110、内周側円板108、外周側円板105の組み合わせにより構成されており、図4および図5に示すように、変速比可変機構112のアクチュエータ180によりピニオン110を回転させて、内周側円板108に対して外周側円板105を回転させることにより、偏心ディスク104の入力中心軸線O1(ピニオン110の回転中心)に対する偏心量r1を調節することができる。そして、この無限・無段変速機構BD(BD1、BD2)においては、偏心量r1を調節することにより、偏心ディスク104からワンウェイ・クラッチ120の入力部材122に伝えられる揺動運動の揺動角度θ2を変更し、それにより入力軸101に入力される回転動力が偏心ディスク104および連結部材130を介してワンウェイ・クラッチ120の出力部材121に回転動力として伝達される際の変速比(レシオ:i)を変更すると共に、偏心量r1をゼロに設定することで変速比を無限大∞に設定することができるようになっている。
【0043】
例えば、図4(a)、図5(a)に示すように、偏心ディスク104の偏心量r1を「大」にした場合は、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を大きくすることができるので、小さな変速比iを実現することができる。また、図4(b)、図5(b)に示すように、偏心ディスク104の偏心量r1を「中」にした場合は、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を「中」にすることができるので、中くらいの変速比iを実現することができる。また、図4(c)、図5(c)に示すように、偏心ディスク104の偏心量r1を「小」にした場合は、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を小さくすることができるので、大きな変速比iを実現することができる。また、図4(d)に示すように、偏心ディスク104の偏心量r1を「ゼロ」にした場合は、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を「ゼロ」にすることができるので、変速比iを「無限大(∞)」にすることができる。
【0044】
図6は同変速機構BD(BD1、BD2)において、入力軸101と共に等速回転する偏心ディスク104の偏心量r1(変速比i)を「大」、「中」、「小」と変化させた場合の、入力軸101の回転角度(θ)とワンウェイ・クラッチ120の入力部材122の角速度ω2の関係を示す図、図8は同変速機構BD(BD1、BD2)において、複数の連結部材130によって入力側(入力軸101や偏心ディスク104)から出力側(ワンウェイ・クラッチ120の出力部材121)へ動力が伝達される際の出力の取り出し原理を説明するための図である。
【0045】
偏心ディスク104を回転させる入力軸101が1回転すると、ワンウェイ・クラッチ120の入力部材122は1往復揺動する。図6に示すように、偏心ディスク104の偏心量r1の値に関係なく、ワンウェイ・クラッチ120の入力部材122の揺動周期は常に一定である。入力部材122の角速度ω2は、偏心ディスク104(入力軸101)の回転角速度ω1と偏心量r1によって決まる。
【0046】
入力軸101とワンウェイ・クラッチ120を繋ぐ複数の連結部材130の一端(リング部131)は、入力中心軸線O1の周りに周方向等間隔で設けられた偏心ディスク104に回転自在に連結されているので、各偏心ディスク104の回転運動によりワンウェイ・クラッチ120の入力部材122にもたらされる揺動運動は、図8に示すように、一定の位相で順番に起こることになる。
【0047】
その際、ワンウェイ・クラッチ120の入力部材122から出力部材121への動力(トルク)の伝達は、入力部材122の正方向(図3中矢印RD1方向)の回転速度が出力部材121の正方向の回転速度を超えた条件でのみ行われる。つまり、ワンウェイ・クラッチ120では、入力部材122の回転速度が出力部材121の回転速度より高くなったときに初めてローラ123を介しての噛み合い(ロック)が発生し、連結部材130により、入力部材122の動力が出力部材121に伝達され、駆動力が発生する。
【0048】
1つの連結部材130による駆動が終了した後は、入力部材122の回転速度が出力部材121の回転速度より低下すると共に、他の連結部材130の駆動力によってローラ123によるロックが解除されて、フリーな状態(空転状態)に戻る。これが、連結部材130の数だけ順番に行われることで、揺動運動が一方向の回転運動に変換される。そのため、出力部材121の回転速度を超えたタイミングの入力部材122の動力のみが出力部材121に順番に伝えられ、ほぼ平滑に均された回転動力が出力部材121に与えられることになる。
【0049】
また、この4節リンク機構式の無限・無段変速機構BD(BD1、BD2)では、偏心ディスク104の偏心量r1を変更することで、変速比(レシオ=エンジンのクランク軸の1回転でどれだけ被回転駆動部材を回転させるか)を決めることができる。この場合、偏心量r1をゼロに設定することで、変速比iを無限大に設定することができ、エンジンの回転中にも拘わらず、入力部材122に伝達される揺動角度θ2をゼロにすることができる。
【0050】
従って、図8に示すように、無限・無段変速機構BD(BD1、BD2)は、4節リンク機構としてモデル化することができる。即ち、この無限・無段変速機構BD(BD1、BD2)には、入力中心軸線O1、第1支点O3、第2支点O4、出力中心軸線O2をそれぞれ回転対偶とし、また、入力中心軸線O1と出力中心軸線O2を結ぶ線分を第1リンクLn1、入力中心軸線O1と第1支点O3を結ぶ線分を第2リンクLn2、第1支点O3と第2支点O4を結ぶ線分を第3リンクLn3、出力中心軸線O2と第2支点O4を結ぶ線分を第4リンクLn4とし、第1リンクLn1を固定節、第2リンクを原動節Ln2、第3リンクLn3を従動節とした4節リンク機構が原理機構として組み込まれており、この4節リンク機構が複数個、入力軸101の回転方向に位相をずらして配列されることで、無限・無段変速機構BD(BD1、BD2)が構成されていると言うことができる。
【0051】
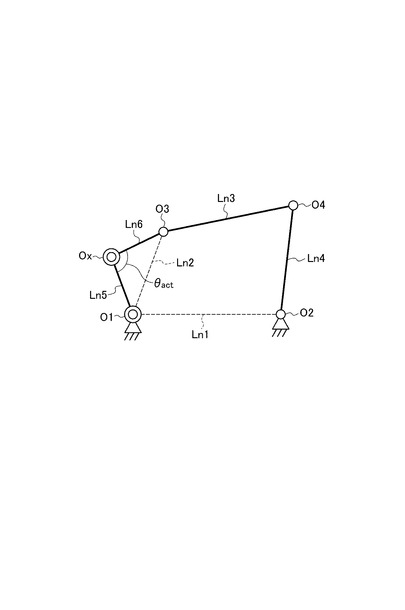
また、図9は前記無限・無段変速機構BD(BD1、BD2)の4節リンク機構において第2リンクLn2の長さ(偏心量r1に相当する)を調節するための第5、第6リンクによるリンク機構を追加したモデル図である。
【0052】
ここで、第5リンクLn5は、ピニオン110の自転中心である入力中心軸線O1と、ピニオン110の公転中心である内周側円板108及びそれを収容する第1円形孔106の中心Oxとを結ぶ線分に相当する。また、第6リンクLn6は、前記点Oxと第1支点O3とを結ぶ線分に相当する。また、点Oxは、第5リンクLn5と第6リンクLn6を回動自在に連結する回転対偶に相当する。
【0053】
第2リンクLn2と第5リンクLn5と第6リンクLn6は三角形を構成し、第5リンクLn5と第6リンクLn6の長さがそれぞれ固定であるから、第5リンクLn5と第6リンクLn6が動いて点Oxと点O1と点O3の位置関係が変化することによって、第2リンクLn2の長さ(偏心ディスク104の偏心量r1に相当する)が変化する。
【0054】
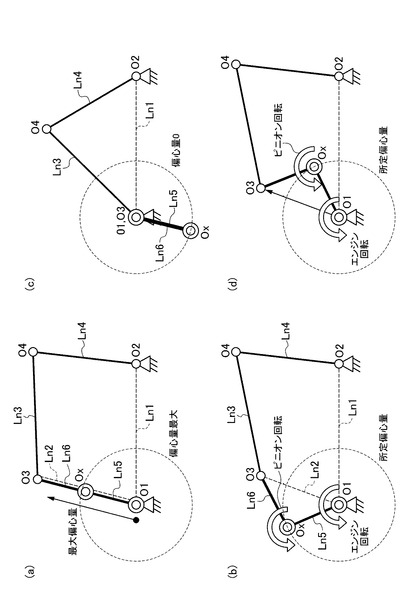
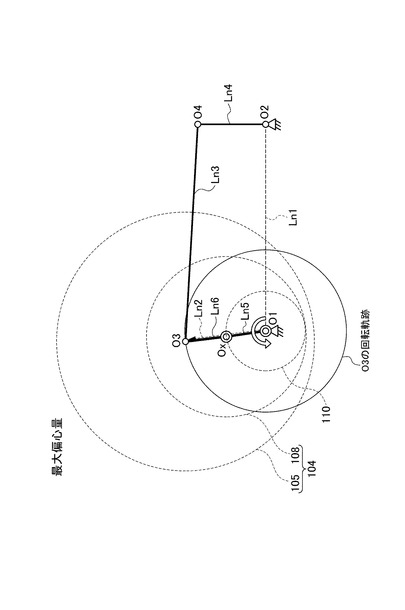
図10は、第5リンクLn5と第6リンクLn6を動かすことによって、第2リンクLn2の長さ(偏心量r1)を調節した場合の各リンクの位置関係を示す図である。(a)は第2リンクLn2の長さ(偏心量r1)を最大に調節した場合、(b)は(a)の位置から第5リンクLn5を一定方向に回転させることで第2リンクLn2の長さ(偏心量r1)を最大と最小の間の所定値に調節した場合、(c)は(b)の状態からさらに第5リンクLn5を一定方向に回転させることで第2リンクLn2の長さ(偏心量r1)を最小つまりゼロに調節した場合、(d)は(c)の位置からさらに第5リンクLn5を一定方向に回転させることで第2リンクLn2の長さ(偏心量r1)を最大と最小の間の所定値に調節した場合をそれぞれ示す図である。また、図11〜図14は、図10(a)〜(d)の状態に相当するときの無限・無段変速機構BD(BD1、BD2)の各要素(ピニオン110、内周側円板108、外周側円板105)の関係をそれぞれ示す図である。
【0055】
図10〜図14に示すように、ピニオン110を偏心ディスク104に対して例えば一定方向に相対回転させることで、第2リンクLn2の長さ(偏心量r1)を最大から最小(ゼロ)の間で自由に調節することができる。また、逆方向に相対回転させる場合にも、第2リンクLn2の長さ(偏心量r1)を最大から最小(ゼロ)の間で自由に調節することができる。
【0056】
ところで、ピニオン110を回転させる方向は自由に選ぶことができ、図15に示すように、第2リンクLn2の長さ(偏心量r1)を最大と最小の間で調節するとき、第5、第6リンクLn5、Ln6および点Oxの配置が、図15(a)に示すようなAの状態にある条件で調節する場合と、図15(b)に示すようなBの状態にある条件で調節する場合の2通りが考えられる。ここで、Aの状態とは、ピニオン110の公転中心である内周側円板108の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも内側(出力中心軸線O2及び第2支点O4に近い側)に位置する状態である。また、Bの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも外側(出力中心軸線O2及び第2支点O4に遠い側)に位置する状態である。
【0057】
例えば、入力軸101の回転がCCW方向(矢印R1方向)の場合、Aの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも後側に位置する状態である。また、Bの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも前側に位置する状態である。
【0058】
一方、入力軸101の回転がCW方向(矢印R1と逆方向)の場合、Aの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも前側に位置する状態である。また、Bの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも後側に位置する状態である。
【0059】
この2つの条件で共に前記第2リンクLn2の長さ(偏心量r1)に調節することができるが、2つの条件では、ピニオン110に加えるトルクTA、TBには差が出る。
【0060】
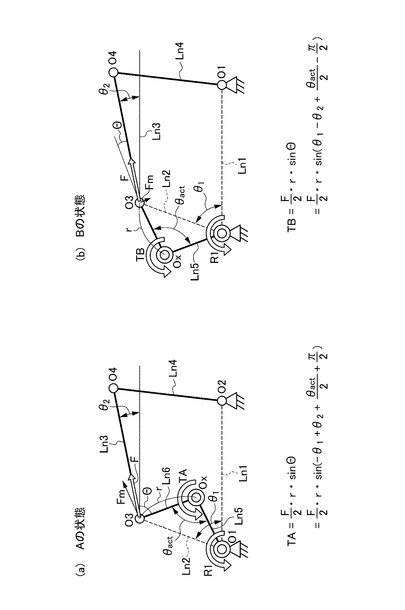
図16は、入力軸101の回転方向が矢印R1のようにCCW回転であるときの、エンゲージ時(ワンウェイ・クラッチ120の出力部材121にエンジン側からの動力が伝達される区間)の前記Aの状態とBの状態での前記第5、第6リンクの連結点Oxに作用するトルクの計算のための説明図で、(a)はAの状態のとき、(b)はBの状態のときの説明図である。入力軸101の回転方向が逆のCW回転であるときは、位相が逆になるため、TAとTBの大小は逆転する。
【0061】
図16において、力Fは連結部材130(第3リンクLn3)の張力に対抗する入力側の第1支点O3の反作用力である。また、力Fmは力Fを分解した成分で、第1支点O3に回転力として働く力である。入力軸101が矢印R1のようにCCW回転するとき、連結部材130(第3リンクLn3)には、ワンウェイ・クラッチ120に動力を伝達するための張力が発生し、偏心ディスク104の中心点である第1支点O3には力Fが反作用力として働く。そのときの、点Oxの周りのトルク(以下、ピニオントルクと言う)を計算すると、Aの状態では、ピニオントルクTAは次式(1)のようになり、Bの状態では、ピニオントルクTBは次式(2)のようになる。
【0062】

【0063】
ここで、rは、第5リンクLn5、第6リンクLn6の各長さであり、ピニオン110の半径に相当する。また、θ1は第1リンクLn1と第2リンクLn2のなす角度、θ2は第3リンクLn3と第1リンクLn1のなす角度、θactは第5リンクLn5と第6リンクLn6のなす角度、Θは第6リンクLn6と第3リンクLn3のなす角度である。
【0064】
Θの値は、幾何学的な関係から、Aの状態では、
となり、Bの状態では、
となる。
【0065】
上記式(1)、(2)のsin値、つまり、Aの状態のときの
およびBの状態のときの
は、力Fによるピニオントルク成分であり、各リンクの位置により異なるため時々刻々と変化する。しかし、入力軸101の回転方向により、決まった大小関係にあることが計算により確かめられた。なお、式(1)及び式(2)で、括弧の値を2で割るは、ピニオン110の歯数と内歯歯車107の歯数の比が1:2とされていることによる。
【0066】
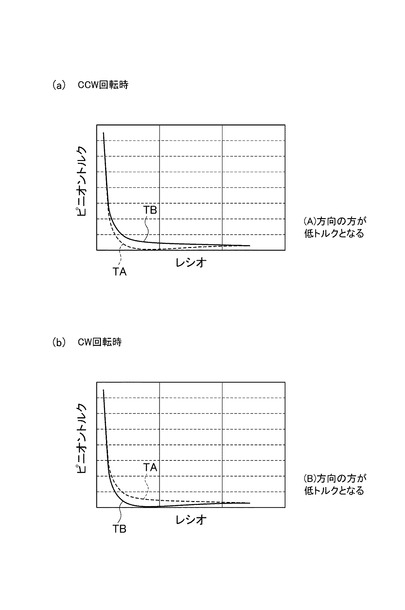
図17(a)はCCW回転時のTAとTBの大小関係の計算結果を示し、図17(b)はCW回転時のTAとTBの大小関係の計算結果を示している。レシオに応じてピニオントルクTA、TBは変化するが、同じ方向の入力軸の回転中に大小関係は逆転しない。また、CCW回転時はTA≦TBとなり、CW回転時はTA≧TBとなる。
【0067】
そこで、本実施形態では、制御手段5がアクチュエータ180を制御するとき、原動機の回転方向に応じた入力軸101の回転方向において、ピニオン110の公転中心である内周側円板108の中心Oxが入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2に相当する線)よりも後側に位置するように、入力中心軸線O1に対する第1支点O3の偏心量r1を変更する。そして、入力軸101の回転方向において、内周側円板108の中心Oxが入力中心軸線O1と第1支点O3を結ぶ線よりも後側に位置する条件の下で、アクチュエータ180によりピニオン110に、入力軸101の回転方向と同じ回転方向の回転トルクを与えることにより、入力中心軸線O1に対する第1支点O3の偏心量r1を変更または維持するようにしている。
【0068】
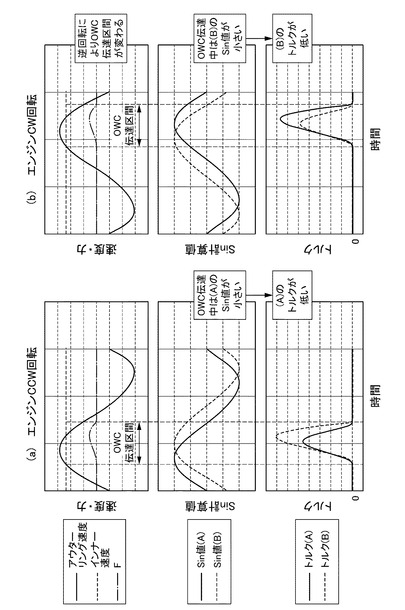
図18は原動機であるエンジンが正回転(CCW回転)する場合と逆回転(CW回転)する場合の制御の流れを示すフローチャート、図19(a)はエンジンが正回転(CCW回転)する場合の特性図、(b)はエンジンが逆回転(CW回転)する場合の特性図で、それぞれ上段の図はワンウェイ・クラッチの入力部材(アウターリング)及び出力部材(インナーリング)の速度とワンウェイ・クラッチがトルク伝達するときに連結部材への入力点(第1支点O3)に発生する力Fの関係の時間変化を示す図、中段の図は前記Aの状態のときとBの状態のときの前記点Oxに作用するトルク(ピニオントルク)の計算式の中のsin値の時間変化を示す図、下段の図は前記Aの状態のときとBの状態のときの前記点Oxに作用するトルク(ピニオントルク)の時間変化を示す図である。
【0069】
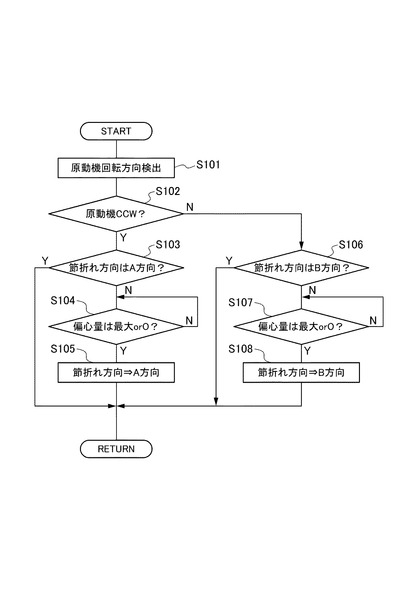
図18のフローチャートに従って説明すると、アクチュエータ180の制御を行う際に、まず、ステップS101で原動機の回転方向(入力軸101)を検出し、ステップS102での判断により原動機の回転方向がCCW方向の場合は、ステップS103に進み、節折れ方向がA方向(Aの状態)かどうかをチェックする。A方向の場合はそのまま図示しないメインルーチンに戻る。ステップS103で節折れ方向がA方向でないと判断した場合は、ステップS104で偏心量r1が最大かゼロになるのを待ち(節折れがない状態になるのを待ち)、偏心量r1が最大かゼロになったらステップS105に進み、次回、所定の偏心量r1を与える際に、節折れ方向をA方向に選択してメインルーチンに戻る。
【0070】
また、ステップS102の判断により原動機の回転方向がCW方向の場合は、ステップS106に進み、節折れ方向がB方向(Bの状態)かどうかをチェックする。B方向の場合はそのまま図示しないメインルーチンに戻る。ステップS106で節折れ方向がB方向でないと判断した場合は、ステップS107で偏心量r1が最大かゼロになるのを待ち(節折れがない状態になるのを待ち)、偏心量r1が最大かゼロになったらステップS108に進み、次回、所定の偏心量r1を与える際に、節折れ方向をB方向に選択してメインルーチンに戻る。
【0071】
このように制御することにより、入力軸101の回転方向がCCW方向の場合は、Aの状態で、アクチュエータ180によりピニオン110にトルクTAを加えるようにする。また、入力軸101の回転方向がCW方向の場合は、Bの状態で、アクチュエータ180によりピニオン110にトルクTBを加えるようにする。この場合、図19に示す特性図からわかるように、エンゲージ区間(OWC伝達区間)において、CCW回転時はAの状態の方がピニオントルク成分(sin値)が小さく低トルクとなり、CW回転時はBの状態の方がピニオントルク成分(sin値)が小さく低トルクとなる。従って、原動機の回転方向が変わるような場合であっても、変速比を維持するために必要なピニオン110のトルクを低減させることができ、アクチュエータ180の消費電力の低減を図ることができる。
【0072】
以上説明したように、本実施形態の無限・無段変速機構BDによれば、エンジンENG1、ENG2の回転方向に応じた入力軸101の回転方向において、ピニオン110の公転中心である内周側円板108の中心Oxが入力中心軸線O1と第1支点O3を結ぶ線よりも後側に位置するように、入力中心軸線O1に対する第1支点O3の偏心量r1を変更するので、エンジンENG1、ENG2の回転方向に対してピニオン110に加えるトルクの方向が最適化され、連結部材130を介して動力を伝達する際、変速比を維持するために必要なピニオン110のトルクを低減させることができ、アクチュエータ180の消費電力の低減を図ることができる。
【0073】
また、原動機が正逆回転可能なものであり、制御手段5が原動機の回転方向に応じて、ピニオン110の公転中心である内周側円板108の中心Oxが、入力軸101の回転方向において入力中心軸線O1と第1支点O3を結ぶ線よりも後側に位置するように、入力中心軸線O1に対する第1支点O3の偏心量r1を変更するので、原動機の回転方向が変わるような場合であっても、変速比を維持するために必要なピニオン110のトルクを低減させることができ、アクチュエータ180の消費電力の低減を図ることができる。
【0074】
また、制御手段5は、ピニオン110の公転中心である内周側円板108の中心Oxが、入力軸101の回転方向において入力中心軸線O1と第1支点O3を結ぶ線よりも前側に位置する場合には、偏心量r1が最大またはゼロであるときに、内周側円板108の中心Oxが入力軸101の回転方向において入力中心軸線O1と第1支点O3を結ぶ線よりも後側に位置するように、入力中心軸線O1に対する第1支点O3の偏心量r1を変更するので、適切なタイミングで、原動機の回転方向に対してピニオン110に加えるトルクの方向が最適化され、アクチュエータ180の消費電力を低減することができる。
【0075】
なお、本発明は、上述した実施形態に限定されるものではなく、適宜、変形、改良、等が可能である。その他、上述した実施形態における各構成要素の材質、形状、寸法、数、配置箇所、等は本発明を達成できるものであれば任意であり、限定されない。
【0076】
例えば、上記実施形態では、エンジンの回転出力を無段・無段変速機構BDを用いて変速する場合を示したが、電動モータ等のその他の原動機の出力を変速する場合にも適用することができる。
【0077】
また、上記実施形態では、エンジンの出力軸が正逆回転可能なものとして説明したが、エンジンの出力軸が正回転のみまたは逆回転のみする場合にも本発明の効果を奏することは勿論である。
【符号の説明】
【0078】
101 入力軸
104 偏心ディスク
105 外周側円板
106 第1の円形孔
107 内歯歯車
108 内周側円板
102 第2の円形孔
110 ピニオン
112 変速比可変機構
120 ワンウェイ・クラッチ
121 出力部材
122 入力部材
123 ローラ(係合部材)
130 連結部材
131 一端部(リング部)
132 他端部
180 アクチュエータ
ENG エンジン(原動機)
BD 無限・無段変速機構
O1 入力中心軸線
O2 出力中心軸線
O3 第1支点
O4 第2支点
r1 偏心量
【技術分野】
【0001】
本発明は、4つの節(リンク)と4つの回転対偶からなり、1つの節を原動節、その対辺をなす節を従動節として、回転運動を揺動運転に変換する4節リンク機構式の無段変速機構及び自動車用駆動システムに関するものである。
【背景技術】
【0002】
従来のこの種の無段変速機構として、エンジンの出力軸の回転運動を揺動運動に変換し、更に揺動運動を回転運動に変換して出力する方式のものが知られている(例えば、特許文献1参照)。特許文献1に記載の回転運動を揺動運動に変換する機構は、図20に示すように、アクチュエータによって駆動されるピニオン209と、このピニオン209の歯に噛み合う内歯を有する偏心ディスク205と、ピニオン209及び偏心ディスク205の相互位置関係を保つための内側ディスク204とを備えている。
【0003】
ピニオン209の自転中心は、図示略のエンジンの出力軸の中心つまり無段変速機構の入力軸の中心軸線(以下、入力中心軸線という)O1上に位置し、ピニオン209の公転中心は、無段変速機構の入力軸と一体回転する内側ディスク204の中心Oxに位置している(実際には、ピニオン209は位置が固定されていて公転しないため、内側ディスク204の中心Oxがピニオン209に対して公転する関係にある)。この場合、内側ディスク204の半径はピニオン209の直径に等しく、ピニオン209の公転半径はピニオン209の半径に等しい。また、偏心ディスク205の中心O3と内側ディスク204の中心Ox間の距離は、ピニオン209の半径に等しい。そして、内側ディスク204の回転に伴って偏心ディスク205の中心O3が、入力中心軸線O1を中心にして回転することにより、偏心ディスク205が入力中心軸線O1の周りを偏心回転し、それにより偏心ディスク205に回転自在に連結されたコンロッド(連結部材)206が揺動運動するようになっている。
【0004】
このように偏心ディスク205が偏心回転するときの偏心量は、点O1と点O3との距離であり、点Oxと点O3の距離が一定(ピニオン209の半径)且つ点Oxと点O1の距離が一定(ピニオン209の半径)であることから、内側ディスク204の中心Oxの位置が、点O1と点O3を結ぶ線に対してどの位置にあるかで、点O1と点O3の距離つまりは偏心量が決定されるようになっている。
【0005】
そこで、偏心量を変化させる場合は、アクチュエータによってピニオン209を偏心ディスク205に対して相対回転させ、歯の噛み合いの進行によって内側ディスク204を偏心ディスク205に対して相対回転させる。そうすると、点O1と点O3と点Oxの位置関係が変化し、点O1と点O3の距離つまり偏心量が変化する。従って、ピニオン209の回転により、ピニオン209と偏心ディスク205との偏心量を変えることができ、それによって変速比を変化させることができる。また、偏心量を変えずに一定の偏心量を維持する場合でも、コンロッド206に作用する力によってピニオン209に負荷トルクが加わりピニオン209を回転させようとするので、その力の大きさによって(ピニオンを保持し得る摩擦力を超える場合)は、定位置にピニオン209を保持するための保持トルクをアクチュエータによって加えておかなくてはならない。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】独国特許発明第102009039993号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、ピニオン209の回転は、上述したように図示しないアクチュエータを使用することにより行われるが、さらなるエネルギー効率の向上及びアクチュエータの小型化を図るためには、ピニオンに加えるトルクを低減させることが課題となっている。
【0008】
本発明は、上述した事情に鑑みてなされたものであり、その目的は、偏心量を維持するため、あるいは、偏心量を変化させるためのアクチュエータの消費電力の低減を図り、エネルギー効率の向上を図ることのできる無段変速機構及び自動車用駆動システムを提供することにある。
【課題を解決するための手段】
【0009】
前述した目的を達成するために、請求項1に係る発明は、原動機(例えば、後述の実施形態におけるENG1、ENG2)からの回転動力を受けることで入力中心軸線(例えば、後述の実施形態における入力中心軸線O1)の周りを回転する入力軸(例えば、後述の実施形態における入力軸101)と、
前記入力中心軸線の周囲に周方向に等間隔に設けられると共に前記入力中心軸線に対する偏心量(例えば、後述の実施形態における偏心量r1)を同期して変更可能な第1支点(例えば、後述の実施形態における第1支点O3)をそれぞれの中心に有し、前記偏心量を保ちつつ前記入力中心軸線の周りに前記入力軸と共に回転する複数の偏心ディスク(例えば、後述の実施形態における偏心ディスク104)と、
前記入力中心軸線から離れた出力中心軸線(例えば、後述の実施形態における出力中心軸線O2)の周りを回転する出力部材(例えば、後述の実施形態における出力部材121)と、外部から回転方向の動力を受けることで前記出力中心軸線の周りを揺動する入力部材(例えば、後述の実施形態における入力部材122)と、これら入力部材および出力部材を互いにロック状態または非ロック状態にする係合部材(例えば、後述の実施形態におけるローラ123)とを有し、前記入力部材の正方向の回転速度が前記出力部材の正方向の回転速度を上回ったとき、前記入力部材に入力された回転動力を前記出力部材に伝達し、それにより前記入力部材の揺動運動を前記出力部材の回転運動に変換するワンウェイ・クラッチ(例えば、後述の実施形態におけるワンウェイ・クラッチ120)と、
それぞれ一端が前記各偏心ディスクの外周に前記第1支点を中心に回転自在に連結され、他端が前記ワンウェイ・クラッチの入力部材上の前記出力中心軸線から離間した位置に設けられた第2支点(例えば、後述の実施形態における第2支点O4)に回動自在に連結されることで、前記入力軸から前記偏心ディスクに与えられる回転運動を、前記ワンウェイ・クラッチの入力部材に対し該入力部材の揺動運動として伝える複数の連結部材(例えば、後述の実施形態における連結部材130)と、
を備え、
前記入力中心軸線、第1支点、第2支点、出力中心軸線をそれぞれ回転対偶とし、また、前記入力中心軸線と出力中心軸線を結ぶ線分を第1リンク(例えば、後述の実施形態における第1リンクLn1)、前記入力中心軸線と第1支点を結ぶ線分を第2リンク(例えば、後述の実施形態における第2リンクLn2)、前記第1支点と第2支点を結ぶ線分を第3リンク(例えば、後述の実施形態における第3リンクLn3)、前記出力中心軸線と第2支点を結ぶ線分を第4リンク(例えば、後述の実施形態における第4リンクLn4)とし、前記第1リンクを固定節、第2リンクを原動節、第3リンクを従動節とする複数の4節リンク機構の組み合わせとして構成され、
前記偏心ディスクが、前記第1支点を中心にした円板として形成され且つその中心に対して一定の偏心距離だけ中心(例えば、後述の実施形態における中心Ox)を偏倚させた第1円形孔(例えば、後述の実施形態における第1円形孔106)を有すると共に外周に前記連結部材の一端が回転自在に嵌合された外周側円板(例えば、後述の実施形態における外周側円板105)と、前記入力軸と一体回転可能に設けられ且つ前記入力中心軸線に対して前記一定の偏心距離と同じ距離だけ中心を偏倚させた円板として形成されて前記外周側円板の第1円形孔の内周に回転可能に嵌合された内周側円板(例えば、後述の実施形態における内周側円板108)とで構成され、
前記内周側円板に、前記入力中心軸線を中心とすると共に周方向の一部が内周側円板の外周に開口した第2円形孔(例えば、後述の実施形態における第2円形孔109)が設けられ、その第2円形孔の内部に前記入力中心軸線と同軸に回転可能なピニオン(例えば、後述の実施形態におけるピニオン110)が収容され、該ピニオンの歯が、前記第2円形孔の外周の開口を通して前記外周側円板の第1円形孔の内周に形成された内歯歯車(例えば、後述の実施形態における内歯歯車107)に噛み合い、
さらに前記ピニオンには、該ピニオンを前記第2円形孔の内部で回転させることにより、ピニオンの歯と内歯歯車の歯の噛み合いによって前記外周側円板を内周側円板に対して相対回転させ、それにより、前記第2リンクの長さに相当する前記入力中心軸線に対する前記第1支点の偏心量を調節するアクチュエータ(例えば、後述の実施形態におけるアクチュエータ180)が接続され、
これらアクチュエータ、ピニオン、内周側円板、外周側円板の組み合わせにより、前記入力中心軸線に対する第1支点の偏心量を調節して、前記偏心ディスクから前記ワンウェイ・クラッチの入力部材に伝えられる揺動運動の揺動角度(例えば、後述の実施形態における揺動角度θ2)を変更し、それにより前記入力軸に入力される回転動力が前記偏心ディスクおよび前記連結部材を介して前記ワンウェイ・クラッチの出力部材に回転動力として伝達される際の変速比を変更すると共に前記偏心量をゼロに設定することで変速比を無限大に設定可能な変速比可変機構(例えば、後述の実施形態における変速比可変機構112)が構成された無段変速機構(例えば、後述の実施形態における無段・無段変速機構BD、BD1、BD2)であって、
前記原動機の回転方向に応じた前記入力軸の回転方向において、前記ピニオンの公転中心である前記内周側円板の中心が前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更する制御手段(例えば、後述の実施形態における制御手段5)を備えることを特徴とする。
【0010】
請求項2に係る発明は、請求項1の構成において、
前記原動機が正逆回転可能なものであり、前記制御手段が前記原動機の回転方向に応じて、前記ピニオンの公転中心である前記内周側円板の中心が、前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更することを特徴とする。
【0011】
請求項3に係る発明は、請求項1または2に記載の構成において、
前記制御手段は、前記ピニオンの公転中心である前記内周側円板の中心が、前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも前側に位置する場合には、前記偏心量が最大またはゼロであるときに、前記内周側円板の中心が前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更することを特徴とする。
【0012】
請求項4に係る発明は、自動車用駆動システム(例えば、後述の実施形態における自動車用駆動システム1)であって、
原動機(例えば、後述の実施形態におけるENG1、ENG2)と、
請求項1〜3のいずれかに記載の前記無段変速機構と、
前記ワンウェイ・クラッチの出力部材に連結され、該出力部材に伝達された回転動力を駆動車輪(例えば、後述の実施形態における駆動車輪2)に伝える被回転駆動部材(例えば、後述の実施形態における被回転駆動部材11)と、
を備えることを特徴とする。
【発明の効果】
【0013】
請求項1及び4の発明によれば、原動機の回転方向に対してピニオンに加えるトルクの方向が最適化され、連結部材を介して動力を伝達する際、変速比を維持するために必要なピニオンのトルクを低減させることができ、アクチュエータの消費電力の低減を図ることができる。
【0014】
請求項2の発明によれば、原動機の回転方向が変わるような場合であっても、アクチュエータの消費電力を低減することができる。
【0015】
請求項3の発明によれば、適切なタイミングで、原動機の回転方向に対してピニオンに加えるトルクの方向が最適化され、アクチュエータの消費電力を低減することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態の無段変速機構の変速制御装置を含む自動車用駆動システムのスケルトン図である。
【図2】同システムの要部である無限・無段変速機構の具体的な構成を示す断面図である。
【図3】同変速機構の一部の構成を軸線方向から見た側断面図である。
【図4】同変速機構における変速比可変機構による変速原理の前半部分の説明図であり、(a)は偏心ディスク104の中心点である第1支点O3の回転中心である入力中心軸線O1に対する偏心量r1を「大」にして変速比iを「小」に設定した状態を示す図、(b)は偏心量r1を「中」にして変速比iを「中」に設定した状態を示す図、(c)は偏心量r1を「小」にして変速比iを「大」に設定した状態を示す図、(d)は偏心量r1を「ゼロ」にして変速比iを「無限大(∞)」に設定した状態を示す図である。
【図5】同変速機構における変速比可変機構による変速原理の後半部分の説明図であって、偏心ディスクの偏心量r1を変更して変速比iを変えた場合のワンウェイ・クラッチ120の入力部材122の揺動角度θ2の変化を示す図であり、(a)は偏心量r1を「大」にし変速比iを「小」にすることで、入力部材122の揺動角度θ2が「大」になった状態を示す図、(b)は偏心量r1を「中」にし変速比iを「中」にすることで、入力部材122の揺動角度θ2が「中」になった状態を示す図、(c)は偏心量r1を「小」にし変速比iを「大」にすることで、入力部材122の揺動角度θ2が「小」になった状態を示す図である。
【図6】同変速機構において、入力軸と共に等速回転する偏心ディスクの偏心量r1(変速比i)を「大」、「中」、「小」と変化させた場合の、入力軸の回転角度θとワンウェイ・クラッチの入力部材の角速度ω2の関係を示す図である。
【図7】同変速機構において、複数の連結部材によって入力側(入力軸や偏心ディスク)から出力側(ワンウェイ・クラッチの出力部材)へ動力が伝達される際の出力の取り出し原理を説明するための図である。
【図8】4節リンク機構として構成された前記無限・無段変速機構の駆動力伝達原理の説明図である。
【図9】同4節リンク機構において第2リンクの長さ(偏心量に相当する)を調節するための第5、第6リンクによるリンク機構を追加したモデル図である。
【図10】前記4節リンク機構において第2リンクの長さ(偏心量に相当する)を調節した場合の例を示す図で、(a)は第2リンクの長さ(偏心量に相当する)を最大に調節した場合、(b)は(a)の位置から第5、第6リンクを一定方向に回転させることで第2リンクの長さ(偏心量に相当する)を最大と最小の間の所定の値に調節した場合、(c)は第2リンクの長さ(偏心量に相当する)を最小つまりゼロに調節した場合、(d)は(c)の位置から第5、第6リンクを一定方向に回転させることで第2リンクの長さ(偏心量に相当する)を最大と最小の間の所定の値に調節した場合をそれぞれ示す図である。
【図11】図10(a)に相当するときの前記無限・無段変速機構の各要素の関係を示す図である。
【図12】図10(b)に相当するときの前記無限・無段変速機構の各要素の関係を示す図である。
【図13】図10(c)に相当するときの前記無限・無段変速機構の各要素の関係を示す図である。
【図14】図10(d)に相当するときの前記無限・無段変速機構の各要素の関係を示す図である。
【図15】前記第2のリンクの長さ(偏心量に相当する)を最大と最小の間の所定値に調節する場合、前記第5、第6リンクの配置が2通り考えられるが、(a)は第1の状態であるAの状態にあるときの図、(b)は第2の状態であるBの状態にあるときの図である。
【図16】前記Aの状態とBの状態にあるときの前記第5、第6リンクの連結点Oxに作用するトルクの計算のための説明図で、(a)はAの状態のとき、(b)はBの状態のときの説明図である。
【図17】(a)はエンジンがCCW(反時計方向)回転するときの、Aの状態とBの状態の前記点Oxに作用するトルク(ピニオントルク)の違いを示す特性図、(b)はエンジンがCW(時計方向)回転するときの、Aの状態とBの状態の前記点Oxに作用するトルク(ピニオントルク)の違いを示す特性図である。
【図18】エンジンが正回転(CCW回転)する場合と逆回転(CW回転)する場合の制御の流れを示すフローチャートである。
【図19】(a)はエンジンが正回転(CCW回転)する場合の特性図、(b)はエンジンが逆回転(CW回転)する場合の特性図で、それぞれ上段の図はワンウェイ・クラッチの入力部材(アウターリング)及び出力部材(インナーリング)の速度とワンウェイ・クラッチがトルク伝達するときに連結部材への入力点(第1支点O3)に発生する力Fの関係の時間変化を示す図、中段の図は前記Aの状態のときとBの状態のときの前記点Oxに作用するトルク(ピニオントルク)の計算式の中のsin値の時間変化を示す図、下段の図は前記Aの状態のときとBの状態のときの前記点Oxに作用するトルク(ピニオントルク)の時間変化を示す図である。
【図20】従来の無段変速機構における回転運動を揺動運動に変換する機構を示す断面図である。
【発明を実施するための形態】
【0017】
以下、本発明の一実施形態を図面に基づいて説明する。
図1は本実施形態の無段変速機構の変速制御装置を含む自動車用駆動システムのスケルトン図、図2は同駆動システムの要部である無限・無段変速機構の具体的な構成を示す断面図、図3は同無限・無段変速機構の一部の構成を軸線方向から見た側断面図である。
【0018】
《全体構成》
この自動車用駆動システム1は、それぞれ独立して回転動力を発生する第1、第2の2つのエンジン(原動機)ENG1、ENG2と、第1、第2のエンジンENG1、ENG2の各下流側に設けられた第1、第2のトランスミッション(変速機構)TM1、TM2と、各トランスミッションTM1、TM2の出力部に設けられた第1、第2のワンウェイ・クラッチOWC1、OWC2と、これらワンウェイ・クラッチOWC1、OWC2を介して伝達された出力回転を受ける被回転駆動部材11と、この被回転駆動部材11に接続されたメインモータジェネレータ(電動モータ)MG1と、第1のエンジンENG1の出力軸S1に接続されたサブモータジェネレータ(エンジンの始動手段)MG2と、メインおよび/またはサブのモータジェネレータMG1、MG2との間で電力のやりとりが可能なバッテリ(蓄電手段)8と、各種要素を制御することで走行パターンなどの制御を行う制御手段5と、を備えている。
【0019】
図3に示すように、各ワンウェイ・クラッチOWC1、OWC2は、入力部材(クラッチアウタ)122と、出力部材(クラッチインナ)121と、これら入力部材122および出力部材121の間に配されて両部材122、121を互いにロック状態または非ロック状態にする複数のローラ(係合部材)123と、ロック状態を与える方向にローラ123を付勢する付勢部材126とを有する。そして、第1のトランスミッションTM1および第2のトランスミッションTM2からの各回転動力を受ける入力部材122の正方向(矢印RD1方向)の回転速度が、出力部材121の正方向の回転速度を上回ったとき、入力部材122と出力部材121が互いにロック状態になることにより、入力部材122に入力された回転動力が出力部材121に伝達される。
【0020】
第1、第2のワンウェイ・クラッチOWC1、OWC2は、ディファレンシャル装置10を挟んで右と左に配置されており、第1、第2のワンウェイ・クラッチOWC1、OWC2の各出力部材121は、それぞれ別の第1、第2のクラッチ機構CL1、CL2を介して、被回転駆動部材11に共に連結されている。第1、第2のクラッチ機構CL1、CL2は、第1、第2のワンウェイ・クラッチOWC1、OWC2の各出力部材121と被回転駆動部材11との間の動力の伝達/遮断を制御するために設けられている。これらのクラッチ機構CL1、CL2としては、他の種類のクラッチ(摩擦クラッチ等)を使用することもできるが、伝達ロスの低さからドグクラッチが使用されている。
【0021】
被回転駆動部材11は、ディファレンシャル装置10のデフケースにより構成されており、各ワンウェイ・クラッチOWC1、OWC2の出力部材121に伝達された回転動力は、ディファレンシャル装置10および左右のアクスルシャフト13L、13Rを介して、左右の駆動車輪2に伝達される。ディファレンシャル装置10のデフケース(被回転駆動部材11)には、図示しないデフピニオンやサイドギヤが取り付けられており、左右のサイドギヤに左右のアクスルシャフト13L、13Rが連結され、左右のアクスルシャフト13L、13Rは差動回転する。
【0022】
第1、第2の2つのエンジンENG1、ENG2には、高効率運転ポイントの互いに異なるエンジンが用いられており、第1のエンジンENG1は排気量の小さいエンジンとされ、第2のエンジンENG2は、第1のエンジンENG1よりも排気量の大きいエンジンとされている。例えば、第1のエンジンENG1の排気量は500ccとされ、第2のエンジンENG2の排気量は1000ccとされており、合計排気量が1500ccとされている。もちろん、排気量の組み合わせは任意である。
【0023】
メインモータジェネレータMG1と被回転駆動部材11は、メインモータジェネレータMG1の出力軸に取り付けたドライブギヤ15と被回転駆動部材11に設けたドリブンギヤ12とが噛合することにより、動力伝達可能に接続されている。例えば、メインモータジェネレータMG1がモータとして機能するときは、メインモータジェネレータMG1から被回転駆動部材11に駆動力が伝達される。また、メインモータジェネレータMG1を発電機として機能させるときは、被回転駆動部材11からメインモータジェネレータMG1に動力が入力され、機械エネルギーが電気エネルギーに変換される。同時に、メインモータジェネレータMG1から被回転駆動部材11に回生制動力が作用する。
【0024】
また、サブモータジェネレータMG2は、第1のエンジンENG1の出力軸S1に直に接続されており、該出力軸S1との間で動力の相互伝達を行う。この場合も、サブモータジェネレータMG2がモータとして機能するときは、サブモータジェネレータMG2から第1のエンジンENG1の出力軸S1に駆動力が伝達される。また、サブモータジェネレータMG2が発電機として機能するときは、第1のエンジンENG1の出力軸S1からサブモータジェネレータMG2に動力が伝達される。
【0025】
以上の要素を備えたこの駆動システム1では、第1のエンジンENG1および第2のエンジンENG2の発生する回転動力が、第1のトランスミッションTM1および第2のトランスミッションTM2を介して、第1のワンウェイ・クラッチOWC1および第2のワンウェイ・クラッチOWC2に入力され、第1のワンウェイ・クラッチOWC1および第2のワンウェイ・クラッチOWC2を介して、回転動力が被回転駆動部材11に入力される。
【0026】
また、この駆動システム1では、第2のエンジンENG2の出力軸S2と被回転駆動部材11との間に、第2のトランスミッションTM2を介した動力伝達と異なる当該出力軸S2と被回転駆動部材11の間での動力伝達を断接可能なシンクロ機構(スタータ・クラッチとも言われるクラッチ手段)20が設けられている。このシンクロ機構20は、被回転駆動部材11に設けたドリブンギヤ12に常時噛み合うと共に第2のエンジンENG2の出力軸S2の周りに回転自在に設けられた第1ギヤ21と、第2のエンジンENG2の出力軸S2の周りに該出力軸S2と一体に回転するように設けられた第2ギヤ22と、軸方向にスライド操作されることで第1ギヤ21と第2ギヤ22を結合または解除するスリーブ24と、を備えている。即ち、シンクロ機構20は、第2のトランスミッションTM2、クラッチ機構CL2を介した動力伝達経路と異なる動力伝達経路を構成し、この動力伝達経路での動力伝達を断接する。
【0027】
《トランスミッションの構成》
次に、この駆動システム1に用いられている第1、第2の2つのトランスミッションTM1、TM2について説明する。
第1、第2のトランスミッションTM1、TM2は、ほぼ同じ構成の無段変速機構により構成されている。この場合の無段変速機構は、IVT(Infinity Variable Transmission=クラッチを使用せずに変速比を無限大にして出力回転をゼロにできる方式の変速機構)と呼ばれるものの一種であり、変速比(レシオ=i)を無段階に変更できると共に、変速比の最大値を無限大(∞)に設定することのできる、無限・無段変速機構BD(BD1、BD2)により構成されている。
【0028】
この無限・無段変速機構BDは、図2および図3に構成を示すように、エンジンENG1、ENG2からの回転動力を受けることで入力中心軸線O1の周りを回転する入力軸101と、入力軸101と一体回転する複数の偏心ディスク104と、入力側と出力側を結ぶための偏心ディスク104と同数の連結部材130と、出力側に設けられたワンウェイ・クラッチ120とを備えている。
【0029】
複数の偏心ディスク104は、それぞれ第1支点O3を中心とした円形形状に形成されている。第1支点O3は、入力軸101の周方向に等間隔に設けられると共に、それぞれが、入力中心軸線O1に対する偏心量r1を変更可能で、且つ、該偏心量r1を保ちつつ、入力中心軸線O1の周りに入力軸101と共に回転するように設定されている。従って、複数の偏心ディスク104は、それぞれに偏心量r1を保った状態で、入力中心軸線O1の周りに入力軸101の回転に伴って偏心回転するように設けられている。
【0030】
偏心ディスク104は、図3に示すように、外周側円板105と、入力軸101にと一体回転可能に設けられた内周側円板108とで構成されている。内周側円板108は、入力軸101の中心軸線である入力中心軸線O1に対して一定の偏心距離だけ中心Oxを偏倚させた肉厚円板として形成されている。外周側円板105は、第1支点O3を中心にした肉厚円板として形成されており、その中心(第1支点O3)を外れた位置に中心(内周側円板108の中心Oxと一致する点)を持つ第1円形孔106を有している。そして、この第1円形孔106の内周に回転可能に内周側円板108の外周が嵌っている。
【0031】
また、内周側円板108には、入力中心軸線O1を中心とすると共に周方向の一部が内周側円板108の外周に開口した第2円形孔109が設けられており、その第2円形孔109の内部にピニオン110が回転自在に収容されている。ピニオン110の歯は、第2円形孔109の外周の開口を通して、外周側円板105の第1円形孔106の内周に形成した内歯歯車107に噛み合っており、ピニオン110の歯数と内歯歯車107の歯数の比が1:2とされている。
【0032】
このピニオン110は、入力軸101の中心軸線である入力中心軸線O1と同軸に回転するように設けられている。即ち、ピニオン110の回転中心と入力軸101の中心軸線である入力中心軸線O1とが一致している。ピニオン110には、図2に示すように、直流モータ及び減速機構によって構成されるアクチュエータ180が接続されており、このアクチュエータ180によりピニオン110は、第2円形孔109の内部で回転させられる。通常時は、入力軸101の回転と同期させてピニオン110を回転させ、また、同期する回転数を基準として、ピニオン110に入力軸101の回転数を上回るか下回るかする回転数を与えることにより、ピニオン110を入力軸101に対して相対回転させる。
【0033】
例えば、ピニオン110およびアクチュエータ180の出力軸が互いに連結されるように配置し、アクチュエータ180の回転が入力軸101の回転に対して回転差が生じる場合には、その回転差に減速比をかけた分だけ入力軸101とピニオン110の相対角度が変化する減速機構(例えば遊星歯車)を用いることで、ピニオン110を回転させる。この際、アクチュエータ180と入力軸101の回転差がなく同期している場合には偏心量r1は変化しない。
【0034】
従って、ピニオン110を回すことにより、ピニオン110の歯が噛合している内歯歯車107つまり外周側円板105が内周側円板108に対して相対回転し、それにより、ピニオン110の自転中心(入力中心軸線O1)と外周側円板105の中心(第1支点O3)とピニオン110の公転中心Oxの位置関係が変化して、ピニオン110の中心(入力中心軸線O1)と外周側円板105の中心(第1支点O3)との間の距離(つまり偏心ディスク104の偏心量r1)が変化する。
【0035】
この場合、ピニオン110の回転によって、ピニオン110の中心(入力中心軸線O1)に外周側円板105の中心(第1支点O3)を一致させることができるように設定されており、両中心を一致させることにより、偏心ディスク104の偏心量r1を「ゼロ」に設定できる。
【0036】
また、ワンウェイ・クラッチ120は、入力中心軸線O1から離れた出力中心軸線O2の周りを回転する出力部材(クラッチインナ)121と、外部から回転方向の動力を受けることで出力中心軸線O2の周りを揺動するリング状の入力部材(クラッチアウタ)122と、これら入力部材122および出力部材121を互いにロック状態または非ロック状態にするために入力部材122と出力部材121の間に挿入された複数のローラ(係合部材)123と、ロック状態を与える方向にローラ123を付勢する付勢部材126とを有し、入力部材122の正方向(例えば、図3中の矢印RD1で示す方向)の回転速度が出力部材121の正方向の回転速度を上回ったとき、入力部材122に入力された回転動力を出力部材121に伝達し、それにより、入力部材122の揺動運動を出力部材121の回転運動に変換することができるようになっている。
【0037】
図2に示すように、ワンウェイ・クラッチ120の出力部材121は、軸方向に一体に連続した部材として構成されたものであるが、入力部材122は、軸方向に複数に分割されており、偏心ディスク104および連結部材130の数だけ、軸方向に各々独立して揺動できるように配列されている。そして、ローラ123は、入力部材122毎に、入力部材122と出力部材121との間に挿入されている。
【0038】
リング状の各入力部材122上の周方向の1箇所には張り出し部124が設けられており、その張り出し部124に、出力中心軸線O2から離間した第2支点O4が設けられている。そして、各入力部材122の第2支点O4上にピン125が配置され、このピン125によって、連結部材130の先端(他端部)132が入力部材122に回転自在に連結されている。
【0039】
連結部材130は、一端側にリング部131を有し、そのリング部131の円形開口133の内周が、ベアリング140を介して、偏心ディスク104の外周に回転自在に嵌合されている。従って、このように連結部材130の一端が偏心ディスク104の外周に回転自在に連結されると共に、連結部材130の他端が、ワンウェイ・クラッチ120の入力部材122上に設けられた第2支点O4に回動自在に連結されることにより、入力中心軸線O1、第1支点O3、出力中心軸線O2、第2支点O4を回転対偶とする四節リンク機構が構成されており、入力軸101から偏心ディスク104に与えられる回転運動が、ワンウェイ・クラッチ120の入力部材122に対して該入力部材122の揺動運動として伝えられ、その入力部材122の揺動運動が出力部材121の回転運動に変換される。
【0040】
その際、ピニオン110、ピニオン110を収容する第2円形孔109を備えた内周側円板108、内周側円板108を回転可能に収容する第1円形孔106を備えた外周側円板105、アクチュエータ180などにより構成された変速比可変機構112の前記ピニオン110をアクチュエータ180で動かすことにより、偏心ディスク104の偏心量r1を変化させることができる。そして、偏心量r1を変更することで、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を変更することができ、それにより、入力軸101の回転数に対する出力部材121の回転数の比(変速比:レシオi)を変えることができる。即ち、入力中心軸線O1に対する第1支点O3の偏心量r1を調節することで、偏心ディスク104からワンウェイ・クラッチ120の入力部材122に伝えられる揺動運動の揺動角度θ2を変更し、それにより、入力軸101に入力される回転動力が、偏心ディスク104および連結部材130を介してワンウェイ・クラッチ120の出力部材121に回転動力として伝達される際の変速比を変更することができる。
【0041】
この場合、第1、第2のエンジンENG1、ENG2の出力軸S1、S2が、この無限・無段変速機構BD(BD1、BD2)の入力軸101に一体に連結されている。また、無限・無段変速機構BD(BD1、BD2)の構成要素であるワンウェイ・クラッチ120が、第1のトランスミッションTM1および第2のトランスミッションTM2と被回転駆動部材11との間に設けられた前記第1のワンウェイ・クラッチOWC1および第2のワンウェイ・クラッチOWC2をそれぞれに兼ねている。
【0042】
図4及び図5は、無限・無段変速機構BD(BD1、BD2)における変速比可変機構112による変速原理の説明図である。
変速比可変機構112は、図3を用いて前述したアクチュエータ180、ピニオン110、内周側円板108、外周側円板105の組み合わせにより構成されており、図4および図5に示すように、変速比可変機構112のアクチュエータ180によりピニオン110を回転させて、内周側円板108に対して外周側円板105を回転させることにより、偏心ディスク104の入力中心軸線O1(ピニオン110の回転中心)に対する偏心量r1を調節することができる。そして、この無限・無段変速機構BD(BD1、BD2)においては、偏心量r1を調節することにより、偏心ディスク104からワンウェイ・クラッチ120の入力部材122に伝えられる揺動運動の揺動角度θ2を変更し、それにより入力軸101に入力される回転動力が偏心ディスク104および連結部材130を介してワンウェイ・クラッチ120の出力部材121に回転動力として伝達される際の変速比(レシオ:i)を変更すると共に、偏心量r1をゼロに設定することで変速比を無限大∞に設定することができるようになっている。
【0043】
例えば、図4(a)、図5(a)に示すように、偏心ディスク104の偏心量r1を「大」にした場合は、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を大きくすることができるので、小さな変速比iを実現することができる。また、図4(b)、図5(b)に示すように、偏心ディスク104の偏心量r1を「中」にした場合は、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を「中」にすることができるので、中くらいの変速比iを実現することができる。また、図4(c)、図5(c)に示すように、偏心ディスク104の偏心量r1を「小」にした場合は、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を小さくすることができるので、大きな変速比iを実現することができる。また、図4(d)に示すように、偏心ディスク104の偏心量r1を「ゼロ」にした場合は、ワンウェイ・クラッチ120の入力部材122の揺動角度θ2を「ゼロ」にすることができるので、変速比iを「無限大(∞)」にすることができる。
【0044】
図6は同変速機構BD(BD1、BD2)において、入力軸101と共に等速回転する偏心ディスク104の偏心量r1(変速比i)を「大」、「中」、「小」と変化させた場合の、入力軸101の回転角度(θ)とワンウェイ・クラッチ120の入力部材122の角速度ω2の関係を示す図、図8は同変速機構BD(BD1、BD2)において、複数の連結部材130によって入力側(入力軸101や偏心ディスク104)から出力側(ワンウェイ・クラッチ120の出力部材121)へ動力が伝達される際の出力の取り出し原理を説明するための図である。
【0045】
偏心ディスク104を回転させる入力軸101が1回転すると、ワンウェイ・クラッチ120の入力部材122は1往復揺動する。図6に示すように、偏心ディスク104の偏心量r1の値に関係なく、ワンウェイ・クラッチ120の入力部材122の揺動周期は常に一定である。入力部材122の角速度ω2は、偏心ディスク104(入力軸101)の回転角速度ω1と偏心量r1によって決まる。
【0046】
入力軸101とワンウェイ・クラッチ120を繋ぐ複数の連結部材130の一端(リング部131)は、入力中心軸線O1の周りに周方向等間隔で設けられた偏心ディスク104に回転自在に連結されているので、各偏心ディスク104の回転運動によりワンウェイ・クラッチ120の入力部材122にもたらされる揺動運動は、図8に示すように、一定の位相で順番に起こることになる。
【0047】
その際、ワンウェイ・クラッチ120の入力部材122から出力部材121への動力(トルク)の伝達は、入力部材122の正方向(図3中矢印RD1方向)の回転速度が出力部材121の正方向の回転速度を超えた条件でのみ行われる。つまり、ワンウェイ・クラッチ120では、入力部材122の回転速度が出力部材121の回転速度より高くなったときに初めてローラ123を介しての噛み合い(ロック)が発生し、連結部材130により、入力部材122の動力が出力部材121に伝達され、駆動力が発生する。
【0048】
1つの連結部材130による駆動が終了した後は、入力部材122の回転速度が出力部材121の回転速度より低下すると共に、他の連結部材130の駆動力によってローラ123によるロックが解除されて、フリーな状態(空転状態)に戻る。これが、連結部材130の数だけ順番に行われることで、揺動運動が一方向の回転運動に変換される。そのため、出力部材121の回転速度を超えたタイミングの入力部材122の動力のみが出力部材121に順番に伝えられ、ほぼ平滑に均された回転動力が出力部材121に与えられることになる。
【0049】
また、この4節リンク機構式の無限・無段変速機構BD(BD1、BD2)では、偏心ディスク104の偏心量r1を変更することで、変速比(レシオ=エンジンのクランク軸の1回転でどれだけ被回転駆動部材を回転させるか)を決めることができる。この場合、偏心量r1をゼロに設定することで、変速比iを無限大に設定することができ、エンジンの回転中にも拘わらず、入力部材122に伝達される揺動角度θ2をゼロにすることができる。
【0050】
従って、図8に示すように、無限・無段変速機構BD(BD1、BD2)は、4節リンク機構としてモデル化することができる。即ち、この無限・無段変速機構BD(BD1、BD2)には、入力中心軸線O1、第1支点O3、第2支点O4、出力中心軸線O2をそれぞれ回転対偶とし、また、入力中心軸線O1と出力中心軸線O2を結ぶ線分を第1リンクLn1、入力中心軸線O1と第1支点O3を結ぶ線分を第2リンクLn2、第1支点O3と第2支点O4を結ぶ線分を第3リンクLn3、出力中心軸線O2と第2支点O4を結ぶ線分を第4リンクLn4とし、第1リンクLn1を固定節、第2リンクを原動節Ln2、第3リンクLn3を従動節とした4節リンク機構が原理機構として組み込まれており、この4節リンク機構が複数個、入力軸101の回転方向に位相をずらして配列されることで、無限・無段変速機構BD(BD1、BD2)が構成されていると言うことができる。
【0051】
また、図9は前記無限・無段変速機構BD(BD1、BD2)の4節リンク機構において第2リンクLn2の長さ(偏心量r1に相当する)を調節するための第5、第6リンクによるリンク機構を追加したモデル図である。
【0052】
ここで、第5リンクLn5は、ピニオン110の自転中心である入力中心軸線O1と、ピニオン110の公転中心である内周側円板108及びそれを収容する第1円形孔106の中心Oxとを結ぶ線分に相当する。また、第6リンクLn6は、前記点Oxと第1支点O3とを結ぶ線分に相当する。また、点Oxは、第5リンクLn5と第6リンクLn6を回動自在に連結する回転対偶に相当する。
【0053】
第2リンクLn2と第5リンクLn5と第6リンクLn6は三角形を構成し、第5リンクLn5と第6リンクLn6の長さがそれぞれ固定であるから、第5リンクLn5と第6リンクLn6が動いて点Oxと点O1と点O3の位置関係が変化することによって、第2リンクLn2の長さ(偏心ディスク104の偏心量r1に相当する)が変化する。
【0054】
図10は、第5リンクLn5と第6リンクLn6を動かすことによって、第2リンクLn2の長さ(偏心量r1)を調節した場合の各リンクの位置関係を示す図である。(a)は第2リンクLn2の長さ(偏心量r1)を最大に調節した場合、(b)は(a)の位置から第5リンクLn5を一定方向に回転させることで第2リンクLn2の長さ(偏心量r1)を最大と最小の間の所定値に調節した場合、(c)は(b)の状態からさらに第5リンクLn5を一定方向に回転させることで第2リンクLn2の長さ(偏心量r1)を最小つまりゼロに調節した場合、(d)は(c)の位置からさらに第5リンクLn5を一定方向に回転させることで第2リンクLn2の長さ(偏心量r1)を最大と最小の間の所定値に調節した場合をそれぞれ示す図である。また、図11〜図14は、図10(a)〜(d)の状態に相当するときの無限・無段変速機構BD(BD1、BD2)の各要素(ピニオン110、内周側円板108、外周側円板105)の関係をそれぞれ示す図である。
【0055】
図10〜図14に示すように、ピニオン110を偏心ディスク104に対して例えば一定方向に相対回転させることで、第2リンクLn2の長さ(偏心量r1)を最大から最小(ゼロ)の間で自由に調節することができる。また、逆方向に相対回転させる場合にも、第2リンクLn2の長さ(偏心量r1)を最大から最小(ゼロ)の間で自由に調節することができる。
【0056】
ところで、ピニオン110を回転させる方向は自由に選ぶことができ、図15に示すように、第2リンクLn2の長さ(偏心量r1)を最大と最小の間で調節するとき、第5、第6リンクLn5、Ln6および点Oxの配置が、図15(a)に示すようなAの状態にある条件で調節する場合と、図15(b)に示すようなBの状態にある条件で調節する場合の2通りが考えられる。ここで、Aの状態とは、ピニオン110の公転中心である内周側円板108の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも内側(出力中心軸線O2及び第2支点O4に近い側)に位置する状態である。また、Bの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも外側(出力中心軸線O2及び第2支点O4に遠い側)に位置する状態である。
【0057】
例えば、入力軸101の回転がCCW方向(矢印R1方向)の場合、Aの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも後側に位置する状態である。また、Bの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも前側に位置する状態である。
【0058】
一方、入力軸101の回転がCW方向(矢印R1と逆方向)の場合、Aの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも前側に位置する状態である。また、Bの状態とは、ピニオンの公転中心である内周側円板の中心Oxが、入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2と重なる位置)よりも後側に位置する状態である。
【0059】
この2つの条件で共に前記第2リンクLn2の長さ(偏心量r1)に調節することができるが、2つの条件では、ピニオン110に加えるトルクTA、TBには差が出る。
【0060】
図16は、入力軸101の回転方向が矢印R1のようにCCW回転であるときの、エンゲージ時(ワンウェイ・クラッチ120の出力部材121にエンジン側からの動力が伝達される区間)の前記Aの状態とBの状態での前記第5、第6リンクの連結点Oxに作用するトルクの計算のための説明図で、(a)はAの状態のとき、(b)はBの状態のときの説明図である。入力軸101の回転方向が逆のCW回転であるときは、位相が逆になるため、TAとTBの大小は逆転する。
【0061】
図16において、力Fは連結部材130(第3リンクLn3)の張力に対抗する入力側の第1支点O3の反作用力である。また、力Fmは力Fを分解した成分で、第1支点O3に回転力として働く力である。入力軸101が矢印R1のようにCCW回転するとき、連結部材130(第3リンクLn3)には、ワンウェイ・クラッチ120に動力を伝達するための張力が発生し、偏心ディスク104の中心点である第1支点O3には力Fが反作用力として働く。そのときの、点Oxの周りのトルク(以下、ピニオントルクと言う)を計算すると、Aの状態では、ピニオントルクTAは次式(1)のようになり、Bの状態では、ピニオントルクTBは次式(2)のようになる。
【0062】
【0063】
ここで、rは、第5リンクLn5、第6リンクLn6の各長さであり、ピニオン110の半径に相当する。また、θ1は第1リンクLn1と第2リンクLn2のなす角度、θ2は第3リンクLn3と第1リンクLn1のなす角度、θactは第5リンクLn5と第6リンクLn6のなす角度、Θは第6リンクLn6と第3リンクLn3のなす角度である。
【0064】
Θの値は、幾何学的な関係から、Aの状態では、
となり、Bの状態では、
となる。
【0065】
上記式(1)、(2)のsin値、つまり、Aの状態のときの
およびBの状態のときの
は、力Fによるピニオントルク成分であり、各リンクの位置により異なるため時々刻々と変化する。しかし、入力軸101の回転方向により、決まった大小関係にあることが計算により確かめられた。なお、式(1)及び式(2)で、括弧の値を2で割るは、ピニオン110の歯数と内歯歯車107の歯数の比が1:2とされていることによる。
【0066】
図17(a)はCCW回転時のTAとTBの大小関係の計算結果を示し、図17(b)はCW回転時のTAとTBの大小関係の計算結果を示している。レシオに応じてピニオントルクTA、TBは変化するが、同じ方向の入力軸の回転中に大小関係は逆転しない。また、CCW回転時はTA≦TBとなり、CW回転時はTA≧TBとなる。
【0067】
そこで、本実施形態では、制御手段5がアクチュエータ180を制御するとき、原動機の回転方向に応じた入力軸101の回転方向において、ピニオン110の公転中心である内周側円板108の中心Oxが入力中心軸線O1と第1支点O3を結ぶ線(第2リンクLn2に相当する線)よりも後側に位置するように、入力中心軸線O1に対する第1支点O3の偏心量r1を変更する。そして、入力軸101の回転方向において、内周側円板108の中心Oxが入力中心軸線O1と第1支点O3を結ぶ線よりも後側に位置する条件の下で、アクチュエータ180によりピニオン110に、入力軸101の回転方向と同じ回転方向の回転トルクを与えることにより、入力中心軸線O1に対する第1支点O3の偏心量r1を変更または維持するようにしている。
【0068】
図18は原動機であるエンジンが正回転(CCW回転)する場合と逆回転(CW回転)する場合の制御の流れを示すフローチャート、図19(a)はエンジンが正回転(CCW回転)する場合の特性図、(b)はエンジンが逆回転(CW回転)する場合の特性図で、それぞれ上段の図はワンウェイ・クラッチの入力部材(アウターリング)及び出力部材(インナーリング)の速度とワンウェイ・クラッチがトルク伝達するときに連結部材への入力点(第1支点O3)に発生する力Fの関係の時間変化を示す図、中段の図は前記Aの状態のときとBの状態のときの前記点Oxに作用するトルク(ピニオントルク)の計算式の中のsin値の時間変化を示す図、下段の図は前記Aの状態のときとBの状態のときの前記点Oxに作用するトルク(ピニオントルク)の時間変化を示す図である。
【0069】
図18のフローチャートに従って説明すると、アクチュエータ180の制御を行う際に、まず、ステップS101で原動機の回転方向(入力軸101)を検出し、ステップS102での判断により原動機の回転方向がCCW方向の場合は、ステップS103に進み、節折れ方向がA方向(Aの状態)かどうかをチェックする。A方向の場合はそのまま図示しないメインルーチンに戻る。ステップS103で節折れ方向がA方向でないと判断した場合は、ステップS104で偏心量r1が最大かゼロになるのを待ち(節折れがない状態になるのを待ち)、偏心量r1が最大かゼロになったらステップS105に進み、次回、所定の偏心量r1を与える際に、節折れ方向をA方向に選択してメインルーチンに戻る。
【0070】
また、ステップS102の判断により原動機の回転方向がCW方向の場合は、ステップS106に進み、節折れ方向がB方向(Bの状態)かどうかをチェックする。B方向の場合はそのまま図示しないメインルーチンに戻る。ステップS106で節折れ方向がB方向でないと判断した場合は、ステップS107で偏心量r1が最大かゼロになるのを待ち(節折れがない状態になるのを待ち)、偏心量r1が最大かゼロになったらステップS108に進み、次回、所定の偏心量r1を与える際に、節折れ方向をB方向に選択してメインルーチンに戻る。
【0071】
このように制御することにより、入力軸101の回転方向がCCW方向の場合は、Aの状態で、アクチュエータ180によりピニオン110にトルクTAを加えるようにする。また、入力軸101の回転方向がCW方向の場合は、Bの状態で、アクチュエータ180によりピニオン110にトルクTBを加えるようにする。この場合、図19に示す特性図からわかるように、エンゲージ区間(OWC伝達区間)において、CCW回転時はAの状態の方がピニオントルク成分(sin値)が小さく低トルクとなり、CW回転時はBの状態の方がピニオントルク成分(sin値)が小さく低トルクとなる。従って、原動機の回転方向が変わるような場合であっても、変速比を維持するために必要なピニオン110のトルクを低減させることができ、アクチュエータ180の消費電力の低減を図ることができる。
【0072】
以上説明したように、本実施形態の無限・無段変速機構BDによれば、エンジンENG1、ENG2の回転方向に応じた入力軸101の回転方向において、ピニオン110の公転中心である内周側円板108の中心Oxが入力中心軸線O1と第1支点O3を結ぶ線よりも後側に位置するように、入力中心軸線O1に対する第1支点O3の偏心量r1を変更するので、エンジンENG1、ENG2の回転方向に対してピニオン110に加えるトルクの方向が最適化され、連結部材130を介して動力を伝達する際、変速比を維持するために必要なピニオン110のトルクを低減させることができ、アクチュエータ180の消費電力の低減を図ることができる。
【0073】
また、原動機が正逆回転可能なものであり、制御手段5が原動機の回転方向に応じて、ピニオン110の公転中心である内周側円板108の中心Oxが、入力軸101の回転方向において入力中心軸線O1と第1支点O3を結ぶ線よりも後側に位置するように、入力中心軸線O1に対する第1支点O3の偏心量r1を変更するので、原動機の回転方向が変わるような場合であっても、変速比を維持するために必要なピニオン110のトルクを低減させることができ、アクチュエータ180の消費電力の低減を図ることができる。
【0074】
また、制御手段5は、ピニオン110の公転中心である内周側円板108の中心Oxが、入力軸101の回転方向において入力中心軸線O1と第1支点O3を結ぶ線よりも前側に位置する場合には、偏心量r1が最大またはゼロであるときに、内周側円板108の中心Oxが入力軸101の回転方向において入力中心軸線O1と第1支点O3を結ぶ線よりも後側に位置するように、入力中心軸線O1に対する第1支点O3の偏心量r1を変更するので、適切なタイミングで、原動機の回転方向に対してピニオン110に加えるトルクの方向が最適化され、アクチュエータ180の消費電力を低減することができる。
【0075】
なお、本発明は、上述した実施形態に限定されるものではなく、適宜、変形、改良、等が可能である。その他、上述した実施形態における各構成要素の材質、形状、寸法、数、配置箇所、等は本発明を達成できるものであれば任意であり、限定されない。
【0076】
例えば、上記実施形態では、エンジンの回転出力を無段・無段変速機構BDを用いて変速する場合を示したが、電動モータ等のその他の原動機の出力を変速する場合にも適用することができる。
【0077】
また、上記実施形態では、エンジンの出力軸が正逆回転可能なものとして説明したが、エンジンの出力軸が正回転のみまたは逆回転のみする場合にも本発明の効果を奏することは勿論である。
【符号の説明】
【0078】
101 入力軸
104 偏心ディスク
105 外周側円板
106 第1の円形孔
107 内歯歯車
108 内周側円板
102 第2の円形孔
110 ピニオン
112 変速比可変機構
120 ワンウェイ・クラッチ
121 出力部材
122 入力部材
123 ローラ(係合部材)
130 連結部材
131 一端部(リング部)
132 他端部
180 アクチュエータ
ENG エンジン(原動機)
BD 無限・無段変速機構
O1 入力中心軸線
O2 出力中心軸線
O3 第1支点
O4 第2支点
r1 偏心量
【特許請求の範囲】
【請求項1】
原動機からの回転動力を受けることで入力中心軸線の周りを回転する入力軸と、
前記入力中心軸線の周囲に周方向に等間隔に設けられると共に前記入力中心軸線に対する偏心量を同期して変更可能な第1支点をそれぞれの中心に有し、前記偏心量を保ちつつ前記入力中心軸線の周りに前記入力軸と共に回転する複数の偏心ディスクと、
前記入力中心軸線から離れた出力中心軸線の周りを回転する出力部材と、外部から回転方向の動力を受けることで前記出力中心軸線の周りを揺動する入力部材と、これら入力部材および出力部材を互いにロック状態または非ロック状態にする係合部材とを有し、前記入力部材の正方向の回転速度が前記出力部材の正方向の回転速度を上回ったとき、前記入力部材に入力された回転動力を前記出力部材に伝達し、それにより前記入力部材の揺動運動を前記出力部材の回転運動に変換するワンウェイ・クラッチと、
それぞれ一端が前記各偏心ディスクの外周に前記第1支点を中心に回転自在に連結され、他端が前記ワンウェイ・クラッチの入力部材上の前記出力中心軸線から離間した位置に設けられた第2支点に回動自在に連結されることで、前記入力軸から前記偏心ディスクに与えられる回転運動を、前記ワンウェイ・クラッチの入力部材に対し該入力部材の揺動運動として伝える複数の連結部材と、
を備え、
前記入力中心軸線、第1支点、第2支点、出力中心軸線をそれぞれ回転対偶とし、また、前記入力中心軸線と出力中心軸線を結ぶ線分を第1リンク、前記入力中心軸線と第1支点を結ぶ線分を第2リンク、前記第1支点と第2支点を結ぶ線分を第3リンク、前記出力中心軸線と第2支点を結ぶ線分を第4リンクとし、前記第1リンクを固定節、第2リンクを原動節、第3リンクを従動節とする複数の4節リンク機構の組み合わせとして構成され、
前記偏心ディスクが、前記第1支点を中心にした円板として形成され且つその中心に対して一定の偏心距離だけ中心を偏倚させた第1円形孔を有すると共に外周に前記連結部材の一端が回転自在に嵌合された外周側円板と、前記入力軸と一体回転可能に設けられ且つ前記入力中心軸線に対して前記一定の偏心距離と同じ距離だけ中心を偏倚させた円板として形成されて前記外周側円板の第1円形孔の内周に回転可能に嵌合された内周側円板とで構成され、
前記内周側円板に、前記入力中心軸線を中心とすると共に周方向の一部が内周側円板の外周に開口した第2円形孔が設けられ、その第2円形孔の内部に前記入力中心軸線と同軸に回転可能なピニオンが収容され、該ピニオンの歯が、前記第2円形孔の外周の開口を通して前記外周側円板の第1円形孔の内周に形成された内歯歯車に噛み合い、
さらに前記ピニオンには、該ピニオンを前記第2円形孔の内部で回転させることにより、ピニオンの歯と内歯歯車の歯の噛み合いによって前記外周側円板を内周側円板に対して相対回転させ、それにより、前記第2リンクの長さに相当する前記入力中心軸線に対する前記第1支点の偏心量を調節するアクチュエータが接続され、
これらアクチュエータ、ピニオン、内周側円板、外周側円板の組み合わせにより、前記入力中心軸線に対する第1支点の偏心量を調節して、前記偏心ディスクから前記ワンウェイ・クラッチの入力部材に伝えられる揺動運動の揺動角度を変更し、それにより前記入力軸に入力される回転動力が前記偏心ディスクおよび前記連結部材を介して前記ワンウェイ・クラッチの出力部材に回転動力として伝達される際の変速比を変更すると共に前記偏心量をゼロに設定することで変速比を無限大に設定可能な変速比可変機構が構成された無段変速機構であって、
前記原動機の回転方向に応じた前記入力軸の回転方向において、前記ピニオンの公転中心である前記内周側円板の中心が前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更する制御手段を備えることを特徴とする無段変速機構。
【請求項2】
前記原動機が正逆回転可能なものであり、前記制御手段が前記原動機の回転方向に応じて、前記ピニオンの公転中心である前記内周側円板の中心が、前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更することを特徴とする請求項1に記載の無段変速機構。
【請求項3】
前記制御手段は、前記ピニオンの公転中心である前記内周側円板の中心が、前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも前側に位置する場合には、前記偏心量が最大またはゼロであるときに、前記内周側円板の中心が前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更することを特徴とする請求項1または2に記載の無段変速機構。
【請求項4】
前記原動機と、
請求項1〜3のいずれか1項に記載の前記無段変速機構と、
前記ワンウェイ・クラッチの出力部材に連結され、該出力部材に伝達された回転動力を駆動車輪に伝える被回転駆動部材と、
を備えることを特徴とする自動車用駆動システム。
【請求項1】
原動機からの回転動力を受けることで入力中心軸線の周りを回転する入力軸と、
前記入力中心軸線の周囲に周方向に等間隔に設けられると共に前記入力中心軸線に対する偏心量を同期して変更可能な第1支点をそれぞれの中心に有し、前記偏心量を保ちつつ前記入力中心軸線の周りに前記入力軸と共に回転する複数の偏心ディスクと、
前記入力中心軸線から離れた出力中心軸線の周りを回転する出力部材と、外部から回転方向の動力を受けることで前記出力中心軸線の周りを揺動する入力部材と、これら入力部材および出力部材を互いにロック状態または非ロック状態にする係合部材とを有し、前記入力部材の正方向の回転速度が前記出力部材の正方向の回転速度を上回ったとき、前記入力部材に入力された回転動力を前記出力部材に伝達し、それにより前記入力部材の揺動運動を前記出力部材の回転運動に変換するワンウェイ・クラッチと、
それぞれ一端が前記各偏心ディスクの外周に前記第1支点を中心に回転自在に連結され、他端が前記ワンウェイ・クラッチの入力部材上の前記出力中心軸線から離間した位置に設けられた第2支点に回動自在に連結されることで、前記入力軸から前記偏心ディスクに与えられる回転運動を、前記ワンウェイ・クラッチの入力部材に対し該入力部材の揺動運動として伝える複数の連結部材と、
を備え、
前記入力中心軸線、第1支点、第2支点、出力中心軸線をそれぞれ回転対偶とし、また、前記入力中心軸線と出力中心軸線を結ぶ線分を第1リンク、前記入力中心軸線と第1支点を結ぶ線分を第2リンク、前記第1支点と第2支点を結ぶ線分を第3リンク、前記出力中心軸線と第2支点を結ぶ線分を第4リンクとし、前記第1リンクを固定節、第2リンクを原動節、第3リンクを従動節とする複数の4節リンク機構の組み合わせとして構成され、
前記偏心ディスクが、前記第1支点を中心にした円板として形成され且つその中心に対して一定の偏心距離だけ中心を偏倚させた第1円形孔を有すると共に外周に前記連結部材の一端が回転自在に嵌合された外周側円板と、前記入力軸と一体回転可能に設けられ且つ前記入力中心軸線に対して前記一定の偏心距離と同じ距離だけ中心を偏倚させた円板として形成されて前記外周側円板の第1円形孔の内周に回転可能に嵌合された内周側円板とで構成され、
前記内周側円板に、前記入力中心軸線を中心とすると共に周方向の一部が内周側円板の外周に開口した第2円形孔が設けられ、その第2円形孔の内部に前記入力中心軸線と同軸に回転可能なピニオンが収容され、該ピニオンの歯が、前記第2円形孔の外周の開口を通して前記外周側円板の第1円形孔の内周に形成された内歯歯車に噛み合い、
さらに前記ピニオンには、該ピニオンを前記第2円形孔の内部で回転させることにより、ピニオンの歯と内歯歯車の歯の噛み合いによって前記外周側円板を内周側円板に対して相対回転させ、それにより、前記第2リンクの長さに相当する前記入力中心軸線に対する前記第1支点の偏心量を調節するアクチュエータが接続され、
これらアクチュエータ、ピニオン、内周側円板、外周側円板の組み合わせにより、前記入力中心軸線に対する第1支点の偏心量を調節して、前記偏心ディスクから前記ワンウェイ・クラッチの入力部材に伝えられる揺動運動の揺動角度を変更し、それにより前記入力軸に入力される回転動力が前記偏心ディスクおよび前記連結部材を介して前記ワンウェイ・クラッチの出力部材に回転動力として伝達される際の変速比を変更すると共に前記偏心量をゼロに設定することで変速比を無限大に設定可能な変速比可変機構が構成された無段変速機構であって、
前記原動機の回転方向に応じた前記入力軸の回転方向において、前記ピニオンの公転中心である前記内周側円板の中心が前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更する制御手段を備えることを特徴とする無段変速機構。
【請求項2】
前記原動機が正逆回転可能なものであり、前記制御手段が前記原動機の回転方向に応じて、前記ピニオンの公転中心である前記内周側円板の中心が、前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更することを特徴とする請求項1に記載の無段変速機構。
【請求項3】
前記制御手段は、前記ピニオンの公転中心である前記内周側円板の中心が、前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも前側に位置する場合には、前記偏心量が最大またはゼロであるときに、前記内周側円板の中心が前記入力軸の回転方向において前記入力中心軸線と前記第1支点を結ぶ線よりも後側に位置するように、前記入力中心軸線に対する前記第1支点の偏心量を変更することを特徴とする請求項1または2に記載の無段変速機構。
【請求項4】
前記原動機と、
請求項1〜3のいずれか1項に記載の前記無段変速機構と、
前記ワンウェイ・クラッチの出力部材に連結され、該出力部材に伝達された回転動力を駆動車輪に伝える被回転駆動部材と、
を備えることを特徴とする自動車用駆動システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【公開番号】特開2013−24382(P2013−24382A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−162380(P2011−162380)
【出願日】平成23年7月25日(2011.7.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月25日(2011.7.25)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]