
無段変速機
【課題】 偏心機構を偏心量0の状態に設定できる四節リンク型の無断変速機を提供する。
【解決手段】 無段変速機1において、駆動力が伝達される入力軸2とピニオンシャフト7とを同一速度で回転させることで偏心機構4の偏心量R1を維持し、入力軸2とピニオンシャフト7の回転速度を異ならせることで偏心量R1を変更するようにして、変速比iを制御する。偏心量R1の変更のために相対回転位置が変化する2つの部材として、突部6dを設けた第1偏心機構41と、偏心量R1が0になるときに突部6dが当接する凹部6eを設けた第2偏心機構42を備える。
【解決手段】 無段変速機1において、駆動力が伝達される入力軸2とピニオンシャフト7とを同一速度で回転させることで偏心機構4の偏心量R1を維持し、入力軸2とピニオンシャフト7の回転速度を異ならせることで偏心量R1を変更するようにして、変速比iを制御する。偏心量R1の変更のために相対回転位置が変化する2つの部材として、突部6dを設けた第1偏心機構41と、偏心量R1が0になるときに突部6dが当接する凹部6eを設けた第2偏心機構42を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、四節リンクの代表的な構造である「てこ・クランク機構」を用いた無段変速機に関する。
【背景技術】
【0002】
従来、車両に設けられたエンジン等の駆動源からの駆動力が伝達される中空の入力軸と、入力軸と平行に配置された出力軸と、入力軸に設けられた複数の偏心機構と、出力軸に揺動自在に軸支される複数の揺動リンクと、一方の端部に偏心機構に回転自在に外嵌される大径環状部を有し、他方の端部が揺動リンクの揺動端部に連結されるコネクティングロッドとを備える四節リンク型の無段変速機が知られている(例えば、特許文献1参照)。
【0003】
特許文献1のものでは、各偏心機構は、入力軸に偏心して設けられた固定ディスクと、この固定ディスクに偏心して回転自在に設けられた揺動ディスクからなる。また、揺動リンクと出力軸との間には、一方向クラッチが設けられている。一方向クラッチは、揺動リンクが出力軸に対して一方側に相対回転しようとするときに、出力軸に揺動リンクを固定し、他方側に相対回転しようとするときに、出力軸に対して揺動リンクを空転させる。
【0004】
入力軸には、ピニオンシャフトが挿入されるとともに、固定ディスクの偏心方向に対向する個所に切欠孔が形成され、この切欠孔からピニオンシャフトが露出している。揺動ディスクには入力軸及び固定ディスクを受け入れる受入孔が設けられている。この受入孔を形成する揺動ディスクの内周面には内歯が形成されている。
【0005】
内歯は、入力軸の切欠孔から露出するピニオンシャフトと噛合する。入力軸とピニオンシャフトとを同一速度で回転させると、偏心機構の偏心量が維持される。入力軸とピニオンシャフトの回転速度を異ならせると、偏心機構の偏心量が変更されて、変速比が変化する。
【0006】
入力軸を回転させることにより偏心機構を回転させると、コネクティングロッドの大径環状部が回転運動して、コネクティングロッドの他方の端部と連結される揺動リンクの揺動端部が揺動する。揺動リンクは、一方向クラッチを介して出力軸に設けられているため、一方側に回転するときのみ出力軸に回転駆動力(トルク)を伝達する。
【0007】
各偏心機構の固定ディスクの偏心方向は、それぞれ位相を異ならせて入力軸周りを一周するように設定されている。従って、各偏心機構に外嵌されたコネクティングロッドによって、揺動リンクが順にトルクを出力軸に伝達するため、出力軸をスムーズに回転させることができる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特表2005−502543号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
このような無段変速機では、上記のように偏心機構の偏心量の変更により変速比が変化するので、無段変速機を適切に制御するためには、偏心量を精度良く検知する必要がある。そのため、偏心機構における揺動ディスクの偏心量の基準として偏心量0の状態を設定することが望ましい。しかしながら、特許文献1に記載された技術では、偏心機構を偏心量0の状態を設定することが考慮されていない。
【0010】
本発明は、偏心機構を偏心量0の状態に設定できる四節リンク型の無断変速機を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は、車両の駆動源からの駆動力が伝達される中空の入力軸と、該入力軸と平行に配置された出力軸と、前記入力軸に偏心して設けられた固定ディスク、及び該固定ディスクに対して偏心して回転自在に設けられた揺動ディスクを有する複数の偏心機構と、前記出力軸に揺動自在に軸支される複数の揺動リンクと、該揺動リンクと前記出力軸との間に設けられ、前記出力軸に対して一方側に相対回転しようとするときに前記出力軸に該揺動リンクを固定し、他方側に相対回転しようとするときに前記出力軸に対して該揺動リンクを空転させる一方向回転阻止機構と、一方の端部に前記偏心機構に回転自在に外嵌される大径環状部を有し、他方の端部が前記揺動リンクの揺動端部に連結されるコネクティングロッドと、前記入力軸内に挿入されたピニオンシャフトとを備え、前記入力軸には、前記固定ディスクの偏心方向に対向する個所に切欠孔が形成され、該切欠孔から前記ピニオンシャフトが露出し、前記揺動ディスクには、前記入力軸及び前記固定ディスクを受け入れる受入孔が設けられ、該受入孔を形成する前記揺動ディスクの内周面に内歯が形成され、該内歯は、前記入力軸の切欠孔から露出する前記ピニオンシャフトと噛合し、前記入力軸と前記ピニオンシャフトとを同一速度で回転させることにより、前記偏心機構の偏心量が維持され、前記入力軸と前記ピニオンシャフトの回転速度を異ならせることにより前記偏心機構の偏心量を変更させて、変速比を制御する無段変速機であって、前記偏心機構の偏心量の変更のために相対回転位置が変化する2つの部材を備え、該2つの部材の一方には突部を設け、他方には前記偏心量が0になるときに前記突部が当接する当接部を設けたことを特徴とする。
【0012】
本発明によれば、偏心機構の偏心量の変更によって相対回転位置が変化する2つの部材のうち、一方に突部を設け、他方に当接部を設ける。突部は当接部に、偏心量が0になるときに当接するため、偏心量が0になったときに同じ方向への回転は阻止される。これにより、偏心量が0の状態を維持できるので、偏心機構を偏心量0の状態に設定できる。
【0013】
本発明において、前記2つの部材の他方は、前記複数の偏心機構のうちの第1偏心機構であり、前記2つの部材の一方は、前記複数の偏心機構のうち前記第1偏心機構の隣に位置する第2偏心機構であり、前記第2偏心機構には前記突部が前記第1偏心機構に向かって突出して設けられ、前記第1偏心機構には前記当接部が設けられることが好ましい。偏心量の変更によって、複数の偏心機構のそれぞれの相対回転位置が変化する。従って、複数の偏心機構のうち第1偏心機構と、第1偏心機構の隣に位置する第2偏心機構とに、当接部と突部を設けることで、偏心量が0になったときに突部が当接部に当接する。これにより、偏心機構を偏心量0に設定できる。
【0014】
本発明において、前記ピニオンシャフトを回転駆動するための電動機を備え、前記複数の偏心機構は少なくとも3つの偏心機構から構成され、前記複数の偏心機構のうち最も電動機に近い偏心機構を前記第1偏心機構又は前記第2偏心機構とし、前記最も電動機に近い偏心機構の隣に位置する偏心機構を前記第2偏心機構又は前記第1偏心機構とすることが好ましい。ピニオンシャフトは、電動機によって回転駆動する。従って、電動機に近い偏心機構に、突部と当接部を設けることで、各部材の遊びやギアのバックラッシュなどによる捩れが少なくなる。従って、偏心機構を偏心量0に設定する際の誤差を小さくできる。
【0015】
本発明において、電動機と、前記入力軸からの回転が入力される第1入力部材、前記電動機からの回転が入力される第2入力部材、及び前記ピニオンシャフトに回転を出力する出力部材を有する差動機構とを備え、前記差動機構は、前記入力軸の回転速度と前記電動機の回転速度とが同一の場合には、前記ピニオンシャフトの回転速度が前記入力軸の回転速度と同一になり、前記入力軸の回転速度と前記電動機の回転速度とが異なる場合には、前記ピニオンシャフトの回転速度が前記入力軸の回転速度と異なるように構成され、前記2つの部材は前記第1入力部材と前記出力部材であることが好ましい。
【0016】
これにより、入力軸の回転速度と電動機の回転速度とが同一の場合には、ピニオンシャフトの回転速度が入力軸の回転速度と同一になるため、偏心量が維持される。また、入力軸の回転速度と電動機の回転速度とが異なる場合には、ピニオンシャフトの回転速度が入力軸の回転速度と異なるため、偏心量が変化する。
【0017】
このように偏心量の変化のために、入力軸とピニオンシャフトの相対回転速度が変化する。従って、入力軸から回転が入力される第1入力部材とピニオンシャフトに回転を出力する出力部材との相対回転速度が変化する。換言すると、第1入力部材と出力部材との相対回転位置が変化する。
【0018】
従って、第1入力部材と出力部材に突部と当接部を設けることで偏心量が0になったときに突部が当接部に当接する。これにより、偏心機構を偏心量0の状態に設定できる。
【図面の簡単な説明】
【0019】
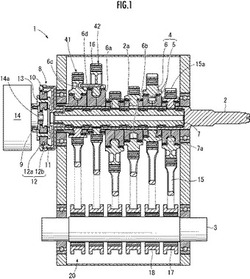
【図1】本発明の第1実施形態の無段変速機を示す断面図。
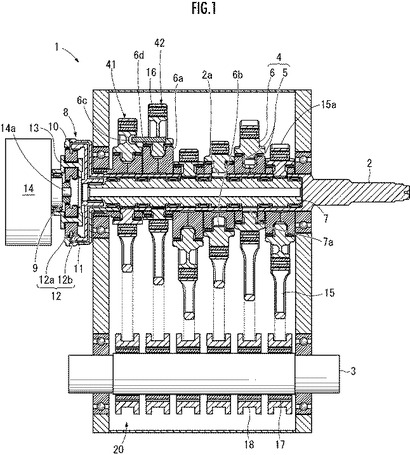
【図2】第1実施形態の偏心機構、コネクティングロッド、揺動リンクを軸方向から示す説明図。
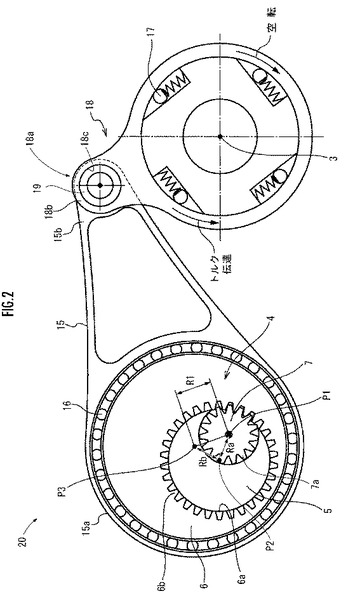
【図3】第1実施形態の偏心機構の偏心量の変化を説明する説明図。
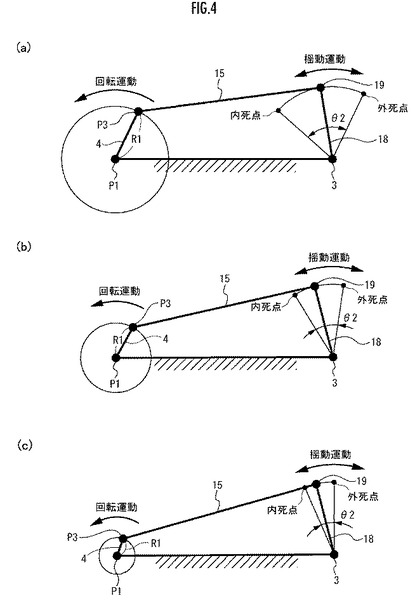
【図4】第1実施形態の偏心機構の偏心量の変化と、揺動リンクの揺動運動の揺動角θ2の関係を示す説明図であり、(a)は偏心量が最大、(b)は偏心量が中、(c)は偏心量が小であるときの揺動リンクの揺動運動の揺動角をそれぞれ示している。
【図5】第1実施形態の偏心機構の偏心量の変化に対する、揺動リンクの角速度ω2の変化を示すグラフ。
【図6】第1実施形態の無段変速機において、それぞれ60度ずつ位相を異ならせた6つの四節リンク機構により、出力軸が回転される状態を示すグラフ。
【図7】(a)は突部を設けた第2偏心機構を示し、(b)は(a)の突部が当接する凹部を設けた第1偏心機構を示す図。
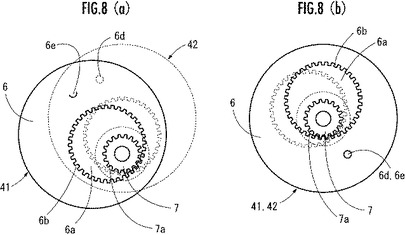
【図8】(a)は偏心量が0でないときの突部と凹部との位置関係を示し、(b)は偏心量が0のときの突部と凹部との位置関係を示す図。
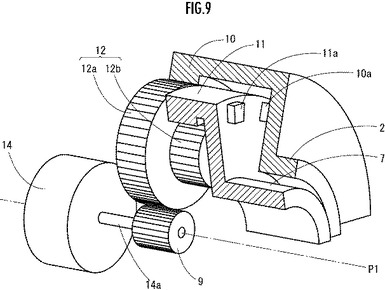
【図9】第2実施形態の無段変速機において、突部と当接部を設けた差動機構を示す模式図。
【発明を実施するための形態】
【0020】
[第1実施形態]
以下、本発明の無段変速機の制御装置の実施形態を説明する。第1実施形態の無段変速機は、変速比i(i=入力軸の回転速度/出力軸の回転速度)を無限大(∞)にして出力軸の回転速度を「0」にできる変速機、所謂インフィニティ・バリアブル・トランスミッション(Infinity Variable Transmission(IVT))の一種である。
【0021】
図1及び図2を参照して、本実施形態の無段変速機1は、図示省略した内燃機関であるエンジンや電動機等の車両用駆動源からの回転動力を受けることで入力中心軸線P1を中心に回転する中空の入力軸2と、入力軸2に平行に配置され、図外のデファレンシャルギアやプロペラシャフト等を介して車両の駆動輪(図示省略)に回転動力を伝達させる出力軸3と、入力軸2に設けられた6つの偏心機構4とを備える。
【0022】
各偏心機構4は、固定ディスク5と、揺動ディスク6とで構成される。固定ディスク5は、円盤状であり、入力中心軸線P1から偏心して入力軸2と一体的に回転するように入力軸2に2個1組でそれぞれ設けられている。各1組の固定ディスク5は、それぞれ位相を60度異ならせて、6組の固定ディスク5で入力軸2の周方向を一回りするように配置されている。また、各1組の固定ディスク5には、固定ディスク5を受け入れる受入孔6aを備える円盤状の揺動ディスク6が偏心させて回転自在に外嵌されている。
【0023】
揺動ディスク6は、固定ディスク5の中心点をP2、揺動ディスク6の中心点をP3として、入力中心軸線P1と中心点P2の距離Raと、中心点P2と中心点P3の距離Rbとが同一となるように、固定ディスク5に対して偏心している。
【0024】
揺動ディスク6の受入孔6aには、1組の固定ディスク5の間に位置させて内歯6bが設けられている。入力軸2には、1組の固定ディスク5の間に位置させて、固定ディスク5の偏心方向に対向する個所に内周面と外周面とを連通させる切欠孔2aが形成されている。
【0025】
また、揺動ディスク6の両面には、偏心方向とは反対方向の外周側に、揺動ディスク6の外周に沿うような三日月形状の窪み部6cが形成されている。
【0026】
中空の入力軸2内には、入力軸2と同心に配置され、揺動ディスク6と対応する個所に外歯7aを備えるピニオンシャフト7が、入力軸2と相対回転自在となるように配置されている。ピニオンシャフト7の外歯7aは、入力軸2の切欠孔2aを介して、揺動ディスク6の内歯6bと噛合する。
【0027】
ピニオンシャフト7には、差動機構8が接続されている。差動機構8は、遊星歯車機構で構成されており、サンギア9と、入力軸2に連結された第1リングギア10と、ピニオンシャフト7に連結された第2リングギア11と、サンギア9及び第1リングギア10と噛合する大径部12aと、第2リングギア11と噛合する小径部12bとから成る段付きピニオン12を自転及び公転自在に軸支するキャリア13とを備える。
【0028】
サンギア9には、ピニオンシャフト7を回転駆動するための電動機14の回転軸14aが連結されている。電動機14の回転軸14aの回転速度(以下、「電動機回転速度」という)を入力軸2の回転速度(以下、「入力軸回転速度」という)と同一にすると、サンギア9と第1リングギア10とが同一速度で回転することとなり、サンギア9、第1リングギア10、第2リングギア11及びキャリア13の4つの要素が相対回転不能なロック状態となって、第2リングギア11と連結するピニオンシャフト7が入力軸2と同一速度で回転する。
【0029】
電動機回転速度を入力軸回転速度よりも遅くすると、サンギア9の回転速度、すなわち電動機回転速度をNm、第1リングギア10の回転速度、すなわち入力軸回転速度をNi、サンギア9と第1リングギア10のギア比(第1リングギア10の歯数/サンギア9の歯数)をjとして、キャリア13の回転速度が「(j・Ni+Nm)/(j+1)」となる。
【0030】
そして、サンギア9と第2リングギア11のギア比{(第2リングギア11の歯数/サンギア9の歯数)×(段付きピニオン12の大径部12aの歯数/小径部12bの歯数)}をkとすると、第2リングギア11の回転速度、すなわちピニオンシャフト7の回転速度(以下、「ピニオンシャフト回転速度」という)Npが「[(k−j)/{k・(j+1)}]・Nm+[{j・(k+1)}/{k・(j+1)}]・Ni」となる。
【0031】
固定ディスク5が固定された入力軸回転速度Niとピニオンシャフト回転速度Npとが同一である場合には、揺動ディスク6は固定ディスク5と共に一体に回転する。入力軸回転速度Niとピニオンシャフト回転速度Npとに差がある場合には、揺動ディスク6は固定ディスク5の中心点P2を中心に固定ディスク5の周縁を回転する。
【0032】
図2に示すように、揺動ディスク6は、固定ディスク5に対して距離Raと距離Rbとが同一となるように偏心されているため、揺動ディスク6の中心点P3を入力中心軸線P1と同一軸線上に位置するようにして、入力中心軸線P1と中心点P3との距離、すなわち偏心量R1を「0」とすることもできる。
【0033】
揺動ディスク6の周縁には、一方の端部に大径の大径環状部15aを備え、他方の端部に大径環状部15aの径よりも小径の小径環状部15bを備えるコネクティングロッド15の大径環状部15aが、ローラベアリング16を介して回転自在に外嵌されている。出力軸3には、一方向回転阻止機構としての一方向クラッチ17を介して、揺動リンク18がコネクティングロッド15に対応させて6個設けられている。
【0034】
揺動リンク18は、環状に形成されており、その上方には、コネクティングロッド15の小径環状部15bに連結される揺動端部18aが設けられている。揺動端部18aには、小径環状部15bを軸方向で挟み込むように突出した一対の突片18bが設けられている。一対の突片18bには、小径環状部15bの内径に対応する貫通孔18cが穿設されている。貫通孔18c及び小径環状部15bには、連結ピン19が挿入されている。これにより、コネクティングロッド15と揺動リンク18とが連結される。
【0035】
図3に偏心機構4の偏心量R1を変化させた状態のピニオンシャフト7と揺動ディスク6との位置関係を示す。図3(a)は偏心量R1を「最大」とした状態を示しており、入力中心軸線P1と、固定ディスク5の中心点P2と、揺動ディスク6の中心点P3とが一直線に並ぶように、ピニオンシャフト7と揺動ディスク6とが位置する。このときの変速比iは最小となる。
【0036】
図3(b)は偏心量R1を図3(a)よりも小さい「中」とした状態を示しており、図3(c)は偏心量R1を図3(b)よりも更に小さい「小」とした状態を示している。変速比iは、図3(b)では図3(a)の変速比iよりも大きい「中」となり、図3(c)では図3(b)の変速比iよりも大きい「大」となる。図3(d)は偏心量R1を「0」とした状態を示しており、入力中心軸線P1と、揺動ディスク6の中心点P3とが同心に位置する。このときの変速比iは無限大(∞)となる。
【0037】
図2に示すように、本実施形態の偏心機構4、コネクティングロッド15、揺動リンク18は四節リンク機構20を構成する。すなわち、本実施形態の無段変速機1は合計6個の四節リンク機構20を備えている。偏心量R1が「0」でないときに、入力軸2を回転させると共に、ピニオンシャフト7を入力軸2と同一速度で回転させると、各コネクティングロッド15が60度ずつ位相を変えながら、偏心量R1に基づき入力軸2と出力軸3との間で出力軸3側に押したり、入力軸2側に引いたりを交互に繰り返して揺動する。
【0038】
コネクティングロッド15の小径環状部15bは、出力軸3に一方向クラッチ17を介して設けられた揺動リンク18に連結されているので、揺動リンク18がコネクティングロッド15によって押し引きされて揺動すると、揺動リンク18が押し方向側又は引張り方向側の何れか一方に回転するときだけ、出力軸3が回転し、揺動リンク18が他方に回転するときには、出力軸3に揺動リンク18の揺動運動の力が伝達されずに、揺動リンク18が空回りする。各偏心機構4は、60度毎に位相を変えて配置されているため、出力軸3は各偏心機構4で順に回転させられる。
【0039】
図4(a)は偏心量R1が図3(a)の「最大」である場合(変速比iが最小である場合)、図4(b)は偏心量R1が図3(b)の「中」である場合(変速比iが中である場合)、図4(c)は偏心量R1が図3(c)の「小」である場合(変速比iが大である場合)の、偏心機構4の回転運動に対する揺動リンク18の揺動範囲θ2を示している。図4から明らかなように、偏心量R1が小さくなるにつれ、揺動リンク18の揺動範囲θ2が狭くなる。尚、偏心量R1が「0」であるときは、揺動リンク18は揺動しなくなる。
【0040】
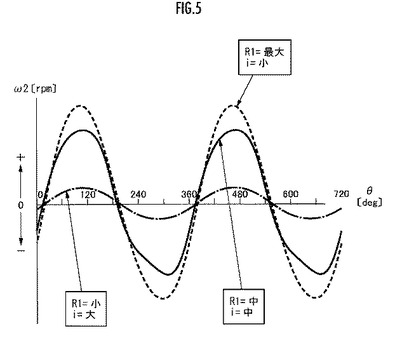
図5に、無段変速機1の偏心機構4の回転角度θを横軸、揺動リンク18の角速度ω2を縦軸として、偏心機構4の偏心量R1の変化に伴う角速度ω2の変化の関係を示す。図5から明らかなように、偏心量R1が大きい(変速比iが小さい)ほど揺動リンク18の角速度ω2が大きくなることが分かる。
【0041】
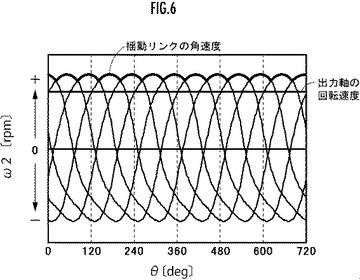
図6は、60度ずつ位相を異ならせた6つの偏心機構4を回転させたとき(入力軸2とピニオンシャフト7とを同一速度で回転させたとき)の偏心機構4の回転角度θに対する、各揺動リンク18の角速度ω2を示している。図6から、6つの四節リンク機構20により出力軸3がスムーズに回転されることが分かる。
【0042】
ここで、図1に示されるように、6つの偏心機構4のうち、電動機14から最も近いものを第1偏心機構41とし、該第1偏心機構41の隣に位置するものを第2偏心機構42とする。
【0043】
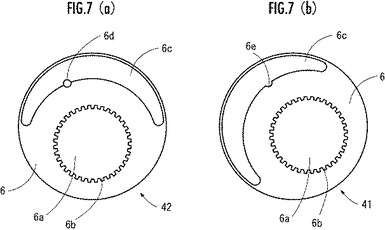
第2偏心機構42には、第1偏心機構41側の面で三日月形状の窪み部6cの内周の中央付近に、突部6dが挿着されている。突部6dは、円柱形状に形成され、第1偏心機構41側に向かって突出している。
【0044】
第1偏心機構41には、第2偏心機構42側の面で三日月形状の窪み部6cの内周の中央付近に、当接部としての凹部6eが形成されている。凹部6eは、偏心機構4の偏心量R1が0になるときに、突部6dが当接する当接部として形成されている。
【0045】
凹部6eは、その表面の全面が、突部6dの表面に沿うように形成されている。これによって、凹部6eに突部6dが当接するときに、接触する面積を増加させることで、当接時のトルクを分散させている。
【0046】
図7(a)は、突部6dが設けられた第2偏心機構42を示し、図7(b)は、凹部6eが設けられた第1偏心機構41を示す。三日月形状の窪み部6cは、無段変速機1の変速比iを変更するとき、すなわち、偏心量R1が変化するときに、第1偏心機構41及び第2偏心機構42の相対回転位置が変わっても、突部6dが第1偏心機構41に接触することを防止できる程度の大きさとなるように形成されている。
【0047】
図8(a)は、偏心量R1が0より大きいときの第1偏心機構41と第2偏心機構42の位置関係、及び突部6dと凹部6eの位置関係を示し、図8(b)は、偏心量R1が0のときの第1偏心機構41と第2偏心機構42の位置関係、及び突部6dと凹部6eの位置関係を示す。図8では、第1偏心機構41を実線で表わし、第2偏心機構42を破線で表わしている。
【0048】
図8に示されるように、偏心量R1が0より大きいときは、突部6dは凹部6eに当接せず、偏心量R1が0になったときは、第1偏心機構41及び第2偏心機構42の外周が一致し、また、突部6dが凹部6eに当接している。
【0049】
以上のように、第1実施形態では、偏心機構4の偏心量R1が0になるとき、突部6dが凹部6eに当接するように構成されている。そして、突部6dが凹部6eに当接することで、同一方向にそれ以上回転しないので、偏心量R1を0のまま維持できる。従って、第1実施形態の無段変速機1では、偏心機構4の偏心量R1を0の状態に設定できる。
【0050】
これにより、例えば車両の停車時に、エンジンを停止することで実行される終了処理において、無段変速機1の変速比iを初期状態(例えば、偏心量R1を0)にできなかった場合であっても、次回の車両の始動時に、突部6dを凹部6eに当接させることで偏心量R1を0にしてから、偏心量R1を変更する制御を開始することで、精度良く変速比iの制御ができる。これによって、無段変速機1を適切に制御できる。
【0051】
偏心量R1を変更するとき、無段変速機1は、電動機14の回転速度の制御によって、ピニオンシャフト7の回転速度を、入力軸2の回転速度と異なる回転速度にすることで、各偏心機構4の偏心量R1が変化する。このとき、図8に示されるように、第1偏心機構41と第2偏心機構42との相対回転位置も変化する。従って、第1実施形態では、第1偏心機構41と第2偏心機構42が、本発明における「偏心機構の偏心量の変更のために相対回転位置が変化する2つの部材」に相当する。
【0052】
また、第1実施形態では、当接部としての凹部6eを電動機14に近い第1偏心機構41に設け、突部6dを第1偏心機構の隣に位置する第2偏心機構42に設けている。これによって、突部6d及び凹部6eを第1偏心機構41及び第2偏心機構42以外の偏心機構、すなわち、電動機14から遠い偏心機構に設けた場合に比べて、偏心機構4の偏心量R1を0に設定する際の誤差を小さくできる。
【0053】
突部6d及び凹部6eを第1偏心機構41及び第2偏心機構42以外の偏心機構に設けた場合、電動機14から遠い分、各部材の遊びや、ギアのバックラッシュなどによる捩れが生じやすくなるので、偏心量R1が0の状態になった後にピニオンシャフト等が多少回転してしまい、偏心量R1が0より大きな値になりやすい。
【0054】
このため、第1実施形態のように、ピニオンシャフトを回転駆動する電動機14に近い第1偏心機構41,第2偏心機構42に凹部6eと突部6dとを設け、突部6dを凹部6eに当接させることで捩れを最小にし、偏心機構4の偏心量R1を0に設定する際の誤差を小さくできる。
【0055】
なお、第1実施形態においては、突部6dを第2偏心機構42に設け、当接部としての凹部6eを第1偏心機構41に設けているが、突部6dを第1偏心機構41に設け、凹部6eを第2偏心機構42に設けてもよい。これによっても、捩れを最小にし、偏心機構4の偏心量R1を0に設定できると共に、この際の誤差を小さくできるという効果が得られる。
【0056】
また、突部6d及び当接部としての凹部6eを第1偏心機構41及び第2偏心機構42以外の偏心機構に設けてもよい。この場合には、突部6dを設けた偏心機構4に隣り合う偏心機構4に、凹部6eを設ければよい。これによっても、突部6d及び凹部6eを設けない無段変速機に比べて、偏心機構4の偏心量R1を0に設定できるという効果が得られる。
【0057】
また、第1実施形態においては、当接部として半円柱形状の凹みの凹部6eを形成しているが、これに限らない。例えば、当接部を、突部6dのように突出した形状に形成してもよい。この場合には、突部及び当接部の接触する面積を大きくするように、突部及び当接部が形成されるとよい。
【0058】
また、第1実施形態においては、一方向回転阻止機構として、一方向クラッチ17を用いているが、本発明の一方向回転阻止機構は、これに限らず、揺動リンク18から出力軸3にトルクを伝達可能な揺動リンク18の出力軸3に対する回転方向を切換自在に構成される二方向クラッチ(ツーウェイクラッチ)で構成してもよい。
【0059】
[第2実施形態]
次に、図9を参照して、第2実施形態の無段変速機1について説明する。第2実施形態の無段変速機1は、突部と当接部を設ける部材が異なる以外は、第1実施形態の無段変速機1と同じ構成である。
【0060】
この第2実施形態では、入力軸2と第1リングギア10との連結部に第1突部10aを設け、ピニオンシャフト7と第2リングギア11との連結部に第2突部11aを設けている。第1突部10aは第2突部11aに、偏心機構4の偏心量R1が0のときに当接するように形成されている。
【0061】
このように偏心量R1が0のときに当接することで、同一方向にはそれ以上回転しないので、偏心量R1を0のまま維持できる。これにより、偏心機構4の偏心量R1を0に設定できる。
【0062】
また、第1実施形態のものに比べ、電動機14により近い位置で第1突部10aを第2突部11aに当接できるため、偏心機構4の偏心量R1を0に設定する際の誤差を小さくできるという効果が得られる。
【0063】
第1実施形態の説明で記載したとおり、偏心量R1を変更するとき、無段変速機1は、電動機14の回転速度の制御によって、第2リングギア11の回転速度すなわちピニオンシャフト7の回転速度を、第1リングギア10の回転速度すなわち入力軸2の回転速度と異なる回転速度にしている。すなわち、偏心量R1を変更するときには、第1リングギア10(入力軸2)と第2リングギア11(ピニオンシャフト7)との相対回転位置は変化する。
【0064】
第2実施形態では、第1リングギア10が本発明における第1入力部材に相当し、サンギア9が本発明における第2入力部材に相当し、第2リングギア11が本発明における出力部材に相当する。また、第1突部10aが突部又は当接部に相当し、第2突部11aが当接部又は突部に相当する。
【符号の説明】
【0065】
1…無段変速機、2…入力軸、2a…切欠孔、3…出力軸、4…偏心機構、5…固定ディスク、6…揺動ディスク、6a…受入孔、6b…内歯、6c…窪み部、6d…突部、6e…凹部(第1実施形態の当接部)、7…ピニオンシャフト、7a…外歯、8…差動機構(遊星歯車機構)、9…サンギア(第2入力部材)、10…第1リングギア(第1入力部材)、10a…第1突部(第2実施形態の突部又は当接部)、11…第2リングギア(出力部材)、11a…第2突部(第2実施形態の当接部又は突部)、12…段付きピニオン、12a…大径部、12b…小径部、13…キャリア、14…駆動源(電動機)、14a…回転軸、15…コネクティングロッド、15a…大径環状部、15b…小径環状部、15c…潤滑油孔、16…ローラベアリング、17…一方向クラッチ(一方向回転阻止機構)、18…揺動リンク、18a…揺動端部、18b…突片、18c…貫通孔、19…連結ピン、20…四節リンク機構、P1…入力中心軸線、P2…固定ディスクの中心点、P3…揺動ディスクの中心点、Ra…P1とP2の距離、Rb…P2とP3の距離、R1…偏心量(P1とP3の距離)、θ2…揺動範囲。
【技術分野】
【0001】
本発明は、四節リンクの代表的な構造である「てこ・クランク機構」を用いた無段変速機に関する。
【背景技術】
【0002】
従来、車両に設けられたエンジン等の駆動源からの駆動力が伝達される中空の入力軸と、入力軸と平行に配置された出力軸と、入力軸に設けられた複数の偏心機構と、出力軸に揺動自在に軸支される複数の揺動リンクと、一方の端部に偏心機構に回転自在に外嵌される大径環状部を有し、他方の端部が揺動リンクの揺動端部に連結されるコネクティングロッドとを備える四節リンク型の無段変速機が知られている(例えば、特許文献1参照)。
【0003】
特許文献1のものでは、各偏心機構は、入力軸に偏心して設けられた固定ディスクと、この固定ディスクに偏心して回転自在に設けられた揺動ディスクからなる。また、揺動リンクと出力軸との間には、一方向クラッチが設けられている。一方向クラッチは、揺動リンクが出力軸に対して一方側に相対回転しようとするときに、出力軸に揺動リンクを固定し、他方側に相対回転しようとするときに、出力軸に対して揺動リンクを空転させる。
【0004】
入力軸には、ピニオンシャフトが挿入されるとともに、固定ディスクの偏心方向に対向する個所に切欠孔が形成され、この切欠孔からピニオンシャフトが露出している。揺動ディスクには入力軸及び固定ディスクを受け入れる受入孔が設けられている。この受入孔を形成する揺動ディスクの内周面には内歯が形成されている。
【0005】
内歯は、入力軸の切欠孔から露出するピニオンシャフトと噛合する。入力軸とピニオンシャフトとを同一速度で回転させると、偏心機構の偏心量が維持される。入力軸とピニオンシャフトの回転速度を異ならせると、偏心機構の偏心量が変更されて、変速比が変化する。
【0006】
入力軸を回転させることにより偏心機構を回転させると、コネクティングロッドの大径環状部が回転運動して、コネクティングロッドの他方の端部と連結される揺動リンクの揺動端部が揺動する。揺動リンクは、一方向クラッチを介して出力軸に設けられているため、一方側に回転するときのみ出力軸に回転駆動力(トルク)を伝達する。
【0007】
各偏心機構の固定ディスクの偏心方向は、それぞれ位相を異ならせて入力軸周りを一周するように設定されている。従って、各偏心機構に外嵌されたコネクティングロッドによって、揺動リンクが順にトルクを出力軸に伝達するため、出力軸をスムーズに回転させることができる。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特表2005−502543号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
このような無段変速機では、上記のように偏心機構の偏心量の変更により変速比が変化するので、無段変速機を適切に制御するためには、偏心量を精度良く検知する必要がある。そのため、偏心機構における揺動ディスクの偏心量の基準として偏心量0の状態を設定することが望ましい。しかしながら、特許文献1に記載された技術では、偏心機構を偏心量0の状態を設定することが考慮されていない。
【0010】
本発明は、偏心機構を偏心量0の状態に設定できる四節リンク型の無断変速機を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明は、車両の駆動源からの駆動力が伝達される中空の入力軸と、該入力軸と平行に配置された出力軸と、前記入力軸に偏心して設けられた固定ディスク、及び該固定ディスクに対して偏心して回転自在に設けられた揺動ディスクを有する複数の偏心機構と、前記出力軸に揺動自在に軸支される複数の揺動リンクと、該揺動リンクと前記出力軸との間に設けられ、前記出力軸に対して一方側に相対回転しようとするときに前記出力軸に該揺動リンクを固定し、他方側に相対回転しようとするときに前記出力軸に対して該揺動リンクを空転させる一方向回転阻止機構と、一方の端部に前記偏心機構に回転自在に外嵌される大径環状部を有し、他方の端部が前記揺動リンクの揺動端部に連結されるコネクティングロッドと、前記入力軸内に挿入されたピニオンシャフトとを備え、前記入力軸には、前記固定ディスクの偏心方向に対向する個所に切欠孔が形成され、該切欠孔から前記ピニオンシャフトが露出し、前記揺動ディスクには、前記入力軸及び前記固定ディスクを受け入れる受入孔が設けられ、該受入孔を形成する前記揺動ディスクの内周面に内歯が形成され、該内歯は、前記入力軸の切欠孔から露出する前記ピニオンシャフトと噛合し、前記入力軸と前記ピニオンシャフトとを同一速度で回転させることにより、前記偏心機構の偏心量が維持され、前記入力軸と前記ピニオンシャフトの回転速度を異ならせることにより前記偏心機構の偏心量を変更させて、変速比を制御する無段変速機であって、前記偏心機構の偏心量の変更のために相対回転位置が変化する2つの部材を備え、該2つの部材の一方には突部を設け、他方には前記偏心量が0になるときに前記突部が当接する当接部を設けたことを特徴とする。
【0012】
本発明によれば、偏心機構の偏心量の変更によって相対回転位置が変化する2つの部材のうち、一方に突部を設け、他方に当接部を設ける。突部は当接部に、偏心量が0になるときに当接するため、偏心量が0になったときに同じ方向への回転は阻止される。これにより、偏心量が0の状態を維持できるので、偏心機構を偏心量0の状態に設定できる。
【0013】
本発明において、前記2つの部材の他方は、前記複数の偏心機構のうちの第1偏心機構であり、前記2つの部材の一方は、前記複数の偏心機構のうち前記第1偏心機構の隣に位置する第2偏心機構であり、前記第2偏心機構には前記突部が前記第1偏心機構に向かって突出して設けられ、前記第1偏心機構には前記当接部が設けられることが好ましい。偏心量の変更によって、複数の偏心機構のそれぞれの相対回転位置が変化する。従って、複数の偏心機構のうち第1偏心機構と、第1偏心機構の隣に位置する第2偏心機構とに、当接部と突部を設けることで、偏心量が0になったときに突部が当接部に当接する。これにより、偏心機構を偏心量0に設定できる。
【0014】
本発明において、前記ピニオンシャフトを回転駆動するための電動機を備え、前記複数の偏心機構は少なくとも3つの偏心機構から構成され、前記複数の偏心機構のうち最も電動機に近い偏心機構を前記第1偏心機構又は前記第2偏心機構とし、前記最も電動機に近い偏心機構の隣に位置する偏心機構を前記第2偏心機構又は前記第1偏心機構とすることが好ましい。ピニオンシャフトは、電動機によって回転駆動する。従って、電動機に近い偏心機構に、突部と当接部を設けることで、各部材の遊びやギアのバックラッシュなどによる捩れが少なくなる。従って、偏心機構を偏心量0に設定する際の誤差を小さくできる。
【0015】
本発明において、電動機と、前記入力軸からの回転が入力される第1入力部材、前記電動機からの回転が入力される第2入力部材、及び前記ピニオンシャフトに回転を出力する出力部材を有する差動機構とを備え、前記差動機構は、前記入力軸の回転速度と前記電動機の回転速度とが同一の場合には、前記ピニオンシャフトの回転速度が前記入力軸の回転速度と同一になり、前記入力軸の回転速度と前記電動機の回転速度とが異なる場合には、前記ピニオンシャフトの回転速度が前記入力軸の回転速度と異なるように構成され、前記2つの部材は前記第1入力部材と前記出力部材であることが好ましい。
【0016】
これにより、入力軸の回転速度と電動機の回転速度とが同一の場合には、ピニオンシャフトの回転速度が入力軸の回転速度と同一になるため、偏心量が維持される。また、入力軸の回転速度と電動機の回転速度とが異なる場合には、ピニオンシャフトの回転速度が入力軸の回転速度と異なるため、偏心量が変化する。
【0017】
このように偏心量の変化のために、入力軸とピニオンシャフトの相対回転速度が変化する。従って、入力軸から回転が入力される第1入力部材とピニオンシャフトに回転を出力する出力部材との相対回転速度が変化する。換言すると、第1入力部材と出力部材との相対回転位置が変化する。
【0018】
従って、第1入力部材と出力部材に突部と当接部を設けることで偏心量が0になったときに突部が当接部に当接する。これにより、偏心機構を偏心量0の状態に設定できる。
【図面の簡単な説明】
【0019】
【図1】本発明の第1実施形態の無段変速機を示す断面図。
【図2】第1実施形態の偏心機構、コネクティングロッド、揺動リンクを軸方向から示す説明図。
【図3】第1実施形態の偏心機構の偏心量の変化を説明する説明図。
【図4】第1実施形態の偏心機構の偏心量の変化と、揺動リンクの揺動運動の揺動角θ2の関係を示す説明図であり、(a)は偏心量が最大、(b)は偏心量が中、(c)は偏心量が小であるときの揺動リンクの揺動運動の揺動角をそれぞれ示している。
【図5】第1実施形態の偏心機構の偏心量の変化に対する、揺動リンクの角速度ω2の変化を示すグラフ。
【図6】第1実施形態の無段変速機において、それぞれ60度ずつ位相を異ならせた6つの四節リンク機構により、出力軸が回転される状態を示すグラフ。
【図7】(a)は突部を設けた第2偏心機構を示し、(b)は(a)の突部が当接する凹部を設けた第1偏心機構を示す図。
【図8】(a)は偏心量が0でないときの突部と凹部との位置関係を示し、(b)は偏心量が0のときの突部と凹部との位置関係を示す図。
【図9】第2実施形態の無段変速機において、突部と当接部を設けた差動機構を示す模式図。
【発明を実施するための形態】
【0020】
[第1実施形態]
以下、本発明の無段変速機の制御装置の実施形態を説明する。第1実施形態の無段変速機は、変速比i(i=入力軸の回転速度/出力軸の回転速度)を無限大(∞)にして出力軸の回転速度を「0」にできる変速機、所謂インフィニティ・バリアブル・トランスミッション(Infinity Variable Transmission(IVT))の一種である。
【0021】
図1及び図2を参照して、本実施形態の無段変速機1は、図示省略した内燃機関であるエンジンや電動機等の車両用駆動源からの回転動力を受けることで入力中心軸線P1を中心に回転する中空の入力軸2と、入力軸2に平行に配置され、図外のデファレンシャルギアやプロペラシャフト等を介して車両の駆動輪(図示省略)に回転動力を伝達させる出力軸3と、入力軸2に設けられた6つの偏心機構4とを備える。
【0022】
各偏心機構4は、固定ディスク5と、揺動ディスク6とで構成される。固定ディスク5は、円盤状であり、入力中心軸線P1から偏心して入力軸2と一体的に回転するように入力軸2に2個1組でそれぞれ設けられている。各1組の固定ディスク5は、それぞれ位相を60度異ならせて、6組の固定ディスク5で入力軸2の周方向を一回りするように配置されている。また、各1組の固定ディスク5には、固定ディスク5を受け入れる受入孔6aを備える円盤状の揺動ディスク6が偏心させて回転自在に外嵌されている。
【0023】
揺動ディスク6は、固定ディスク5の中心点をP2、揺動ディスク6の中心点をP3として、入力中心軸線P1と中心点P2の距離Raと、中心点P2と中心点P3の距離Rbとが同一となるように、固定ディスク5に対して偏心している。
【0024】
揺動ディスク6の受入孔6aには、1組の固定ディスク5の間に位置させて内歯6bが設けられている。入力軸2には、1組の固定ディスク5の間に位置させて、固定ディスク5の偏心方向に対向する個所に内周面と外周面とを連通させる切欠孔2aが形成されている。
【0025】
また、揺動ディスク6の両面には、偏心方向とは反対方向の外周側に、揺動ディスク6の外周に沿うような三日月形状の窪み部6cが形成されている。
【0026】
中空の入力軸2内には、入力軸2と同心に配置され、揺動ディスク6と対応する個所に外歯7aを備えるピニオンシャフト7が、入力軸2と相対回転自在となるように配置されている。ピニオンシャフト7の外歯7aは、入力軸2の切欠孔2aを介して、揺動ディスク6の内歯6bと噛合する。
【0027】
ピニオンシャフト7には、差動機構8が接続されている。差動機構8は、遊星歯車機構で構成されており、サンギア9と、入力軸2に連結された第1リングギア10と、ピニオンシャフト7に連結された第2リングギア11と、サンギア9及び第1リングギア10と噛合する大径部12aと、第2リングギア11と噛合する小径部12bとから成る段付きピニオン12を自転及び公転自在に軸支するキャリア13とを備える。
【0028】
サンギア9には、ピニオンシャフト7を回転駆動するための電動機14の回転軸14aが連結されている。電動機14の回転軸14aの回転速度(以下、「電動機回転速度」という)を入力軸2の回転速度(以下、「入力軸回転速度」という)と同一にすると、サンギア9と第1リングギア10とが同一速度で回転することとなり、サンギア9、第1リングギア10、第2リングギア11及びキャリア13の4つの要素が相対回転不能なロック状態となって、第2リングギア11と連結するピニオンシャフト7が入力軸2と同一速度で回転する。
【0029】
電動機回転速度を入力軸回転速度よりも遅くすると、サンギア9の回転速度、すなわち電動機回転速度をNm、第1リングギア10の回転速度、すなわち入力軸回転速度をNi、サンギア9と第1リングギア10のギア比(第1リングギア10の歯数/サンギア9の歯数)をjとして、キャリア13の回転速度が「(j・Ni+Nm)/(j+1)」となる。
【0030】
そして、サンギア9と第2リングギア11のギア比{(第2リングギア11の歯数/サンギア9の歯数)×(段付きピニオン12の大径部12aの歯数/小径部12bの歯数)}をkとすると、第2リングギア11の回転速度、すなわちピニオンシャフト7の回転速度(以下、「ピニオンシャフト回転速度」という)Npが「[(k−j)/{k・(j+1)}]・Nm+[{j・(k+1)}/{k・(j+1)}]・Ni」となる。
【0031】
固定ディスク5が固定された入力軸回転速度Niとピニオンシャフト回転速度Npとが同一である場合には、揺動ディスク6は固定ディスク5と共に一体に回転する。入力軸回転速度Niとピニオンシャフト回転速度Npとに差がある場合には、揺動ディスク6は固定ディスク5の中心点P2を中心に固定ディスク5の周縁を回転する。
【0032】
図2に示すように、揺動ディスク6は、固定ディスク5に対して距離Raと距離Rbとが同一となるように偏心されているため、揺動ディスク6の中心点P3を入力中心軸線P1と同一軸線上に位置するようにして、入力中心軸線P1と中心点P3との距離、すなわち偏心量R1を「0」とすることもできる。
【0033】
揺動ディスク6の周縁には、一方の端部に大径の大径環状部15aを備え、他方の端部に大径環状部15aの径よりも小径の小径環状部15bを備えるコネクティングロッド15の大径環状部15aが、ローラベアリング16を介して回転自在に外嵌されている。出力軸3には、一方向回転阻止機構としての一方向クラッチ17を介して、揺動リンク18がコネクティングロッド15に対応させて6個設けられている。
【0034】
揺動リンク18は、環状に形成されており、その上方には、コネクティングロッド15の小径環状部15bに連結される揺動端部18aが設けられている。揺動端部18aには、小径環状部15bを軸方向で挟み込むように突出した一対の突片18bが設けられている。一対の突片18bには、小径環状部15bの内径に対応する貫通孔18cが穿設されている。貫通孔18c及び小径環状部15bには、連結ピン19が挿入されている。これにより、コネクティングロッド15と揺動リンク18とが連結される。
【0035】
図3に偏心機構4の偏心量R1を変化させた状態のピニオンシャフト7と揺動ディスク6との位置関係を示す。図3(a)は偏心量R1を「最大」とした状態を示しており、入力中心軸線P1と、固定ディスク5の中心点P2と、揺動ディスク6の中心点P3とが一直線に並ぶように、ピニオンシャフト7と揺動ディスク6とが位置する。このときの変速比iは最小となる。
【0036】
図3(b)は偏心量R1を図3(a)よりも小さい「中」とした状態を示しており、図3(c)は偏心量R1を図3(b)よりも更に小さい「小」とした状態を示している。変速比iは、図3(b)では図3(a)の変速比iよりも大きい「中」となり、図3(c)では図3(b)の変速比iよりも大きい「大」となる。図3(d)は偏心量R1を「0」とした状態を示しており、入力中心軸線P1と、揺動ディスク6の中心点P3とが同心に位置する。このときの変速比iは無限大(∞)となる。
【0037】
図2に示すように、本実施形態の偏心機構4、コネクティングロッド15、揺動リンク18は四節リンク機構20を構成する。すなわち、本実施形態の無段変速機1は合計6個の四節リンク機構20を備えている。偏心量R1が「0」でないときに、入力軸2を回転させると共に、ピニオンシャフト7を入力軸2と同一速度で回転させると、各コネクティングロッド15が60度ずつ位相を変えながら、偏心量R1に基づき入力軸2と出力軸3との間で出力軸3側に押したり、入力軸2側に引いたりを交互に繰り返して揺動する。
【0038】
コネクティングロッド15の小径環状部15bは、出力軸3に一方向クラッチ17を介して設けられた揺動リンク18に連結されているので、揺動リンク18がコネクティングロッド15によって押し引きされて揺動すると、揺動リンク18が押し方向側又は引張り方向側の何れか一方に回転するときだけ、出力軸3が回転し、揺動リンク18が他方に回転するときには、出力軸3に揺動リンク18の揺動運動の力が伝達されずに、揺動リンク18が空回りする。各偏心機構4は、60度毎に位相を変えて配置されているため、出力軸3は各偏心機構4で順に回転させられる。
【0039】
図4(a)は偏心量R1が図3(a)の「最大」である場合(変速比iが最小である場合)、図4(b)は偏心量R1が図3(b)の「中」である場合(変速比iが中である場合)、図4(c)は偏心量R1が図3(c)の「小」である場合(変速比iが大である場合)の、偏心機構4の回転運動に対する揺動リンク18の揺動範囲θ2を示している。図4から明らかなように、偏心量R1が小さくなるにつれ、揺動リンク18の揺動範囲θ2が狭くなる。尚、偏心量R1が「0」であるときは、揺動リンク18は揺動しなくなる。
【0040】
図5に、無段変速機1の偏心機構4の回転角度θを横軸、揺動リンク18の角速度ω2を縦軸として、偏心機構4の偏心量R1の変化に伴う角速度ω2の変化の関係を示す。図5から明らかなように、偏心量R1が大きい(変速比iが小さい)ほど揺動リンク18の角速度ω2が大きくなることが分かる。
【0041】
図6は、60度ずつ位相を異ならせた6つの偏心機構4を回転させたとき(入力軸2とピニオンシャフト7とを同一速度で回転させたとき)の偏心機構4の回転角度θに対する、各揺動リンク18の角速度ω2を示している。図6から、6つの四節リンク機構20により出力軸3がスムーズに回転されることが分かる。
【0042】
ここで、図1に示されるように、6つの偏心機構4のうち、電動機14から最も近いものを第1偏心機構41とし、該第1偏心機構41の隣に位置するものを第2偏心機構42とする。
【0043】
第2偏心機構42には、第1偏心機構41側の面で三日月形状の窪み部6cの内周の中央付近に、突部6dが挿着されている。突部6dは、円柱形状に形成され、第1偏心機構41側に向かって突出している。
【0044】
第1偏心機構41には、第2偏心機構42側の面で三日月形状の窪み部6cの内周の中央付近に、当接部としての凹部6eが形成されている。凹部6eは、偏心機構4の偏心量R1が0になるときに、突部6dが当接する当接部として形成されている。
【0045】
凹部6eは、その表面の全面が、突部6dの表面に沿うように形成されている。これによって、凹部6eに突部6dが当接するときに、接触する面積を増加させることで、当接時のトルクを分散させている。
【0046】
図7(a)は、突部6dが設けられた第2偏心機構42を示し、図7(b)は、凹部6eが設けられた第1偏心機構41を示す。三日月形状の窪み部6cは、無段変速機1の変速比iを変更するとき、すなわち、偏心量R1が変化するときに、第1偏心機構41及び第2偏心機構42の相対回転位置が変わっても、突部6dが第1偏心機構41に接触することを防止できる程度の大きさとなるように形成されている。
【0047】
図8(a)は、偏心量R1が0より大きいときの第1偏心機構41と第2偏心機構42の位置関係、及び突部6dと凹部6eの位置関係を示し、図8(b)は、偏心量R1が0のときの第1偏心機構41と第2偏心機構42の位置関係、及び突部6dと凹部6eの位置関係を示す。図8では、第1偏心機構41を実線で表わし、第2偏心機構42を破線で表わしている。
【0048】
図8に示されるように、偏心量R1が0より大きいときは、突部6dは凹部6eに当接せず、偏心量R1が0になったときは、第1偏心機構41及び第2偏心機構42の外周が一致し、また、突部6dが凹部6eに当接している。
【0049】
以上のように、第1実施形態では、偏心機構4の偏心量R1が0になるとき、突部6dが凹部6eに当接するように構成されている。そして、突部6dが凹部6eに当接することで、同一方向にそれ以上回転しないので、偏心量R1を0のまま維持できる。従って、第1実施形態の無段変速機1では、偏心機構4の偏心量R1を0の状態に設定できる。
【0050】
これにより、例えば車両の停車時に、エンジンを停止することで実行される終了処理において、無段変速機1の変速比iを初期状態(例えば、偏心量R1を0)にできなかった場合であっても、次回の車両の始動時に、突部6dを凹部6eに当接させることで偏心量R1を0にしてから、偏心量R1を変更する制御を開始することで、精度良く変速比iの制御ができる。これによって、無段変速機1を適切に制御できる。
【0051】
偏心量R1を変更するとき、無段変速機1は、電動機14の回転速度の制御によって、ピニオンシャフト7の回転速度を、入力軸2の回転速度と異なる回転速度にすることで、各偏心機構4の偏心量R1が変化する。このとき、図8に示されるように、第1偏心機構41と第2偏心機構42との相対回転位置も変化する。従って、第1実施形態では、第1偏心機構41と第2偏心機構42が、本発明における「偏心機構の偏心量の変更のために相対回転位置が変化する2つの部材」に相当する。
【0052】
また、第1実施形態では、当接部としての凹部6eを電動機14に近い第1偏心機構41に設け、突部6dを第1偏心機構の隣に位置する第2偏心機構42に設けている。これによって、突部6d及び凹部6eを第1偏心機構41及び第2偏心機構42以外の偏心機構、すなわち、電動機14から遠い偏心機構に設けた場合に比べて、偏心機構4の偏心量R1を0に設定する際の誤差を小さくできる。
【0053】
突部6d及び凹部6eを第1偏心機構41及び第2偏心機構42以外の偏心機構に設けた場合、電動機14から遠い分、各部材の遊びや、ギアのバックラッシュなどによる捩れが生じやすくなるので、偏心量R1が0の状態になった後にピニオンシャフト等が多少回転してしまい、偏心量R1が0より大きな値になりやすい。
【0054】
このため、第1実施形態のように、ピニオンシャフトを回転駆動する電動機14に近い第1偏心機構41,第2偏心機構42に凹部6eと突部6dとを設け、突部6dを凹部6eに当接させることで捩れを最小にし、偏心機構4の偏心量R1を0に設定する際の誤差を小さくできる。
【0055】
なお、第1実施形態においては、突部6dを第2偏心機構42に設け、当接部としての凹部6eを第1偏心機構41に設けているが、突部6dを第1偏心機構41に設け、凹部6eを第2偏心機構42に設けてもよい。これによっても、捩れを最小にし、偏心機構4の偏心量R1を0に設定できると共に、この際の誤差を小さくできるという効果が得られる。
【0056】
また、突部6d及び当接部としての凹部6eを第1偏心機構41及び第2偏心機構42以外の偏心機構に設けてもよい。この場合には、突部6dを設けた偏心機構4に隣り合う偏心機構4に、凹部6eを設ければよい。これによっても、突部6d及び凹部6eを設けない無段変速機に比べて、偏心機構4の偏心量R1を0に設定できるという効果が得られる。
【0057】
また、第1実施形態においては、当接部として半円柱形状の凹みの凹部6eを形成しているが、これに限らない。例えば、当接部を、突部6dのように突出した形状に形成してもよい。この場合には、突部及び当接部の接触する面積を大きくするように、突部及び当接部が形成されるとよい。
【0058】
また、第1実施形態においては、一方向回転阻止機構として、一方向クラッチ17を用いているが、本発明の一方向回転阻止機構は、これに限らず、揺動リンク18から出力軸3にトルクを伝達可能な揺動リンク18の出力軸3に対する回転方向を切換自在に構成される二方向クラッチ(ツーウェイクラッチ)で構成してもよい。
【0059】
[第2実施形態]
次に、図9を参照して、第2実施形態の無段変速機1について説明する。第2実施形態の無段変速機1は、突部と当接部を設ける部材が異なる以外は、第1実施形態の無段変速機1と同じ構成である。
【0060】
この第2実施形態では、入力軸2と第1リングギア10との連結部に第1突部10aを設け、ピニオンシャフト7と第2リングギア11との連結部に第2突部11aを設けている。第1突部10aは第2突部11aに、偏心機構4の偏心量R1が0のときに当接するように形成されている。
【0061】
このように偏心量R1が0のときに当接することで、同一方向にはそれ以上回転しないので、偏心量R1を0のまま維持できる。これにより、偏心機構4の偏心量R1を0に設定できる。
【0062】
また、第1実施形態のものに比べ、電動機14により近い位置で第1突部10aを第2突部11aに当接できるため、偏心機構4の偏心量R1を0に設定する際の誤差を小さくできるという効果が得られる。
【0063】
第1実施形態の説明で記載したとおり、偏心量R1を変更するとき、無段変速機1は、電動機14の回転速度の制御によって、第2リングギア11の回転速度すなわちピニオンシャフト7の回転速度を、第1リングギア10の回転速度すなわち入力軸2の回転速度と異なる回転速度にしている。すなわち、偏心量R1を変更するときには、第1リングギア10(入力軸2)と第2リングギア11(ピニオンシャフト7)との相対回転位置は変化する。
【0064】
第2実施形態では、第1リングギア10が本発明における第1入力部材に相当し、サンギア9が本発明における第2入力部材に相当し、第2リングギア11が本発明における出力部材に相当する。また、第1突部10aが突部又は当接部に相当し、第2突部11aが当接部又は突部に相当する。
【符号の説明】
【0065】
1…無段変速機、2…入力軸、2a…切欠孔、3…出力軸、4…偏心機構、5…固定ディスク、6…揺動ディスク、6a…受入孔、6b…内歯、6c…窪み部、6d…突部、6e…凹部(第1実施形態の当接部)、7…ピニオンシャフト、7a…外歯、8…差動機構(遊星歯車機構)、9…サンギア(第2入力部材)、10…第1リングギア(第1入力部材)、10a…第1突部(第2実施形態の突部又は当接部)、11…第2リングギア(出力部材)、11a…第2突部(第2実施形態の当接部又は突部)、12…段付きピニオン、12a…大径部、12b…小径部、13…キャリア、14…駆動源(電動機)、14a…回転軸、15…コネクティングロッド、15a…大径環状部、15b…小径環状部、15c…潤滑油孔、16…ローラベアリング、17…一方向クラッチ(一方向回転阻止機構)、18…揺動リンク、18a…揺動端部、18b…突片、18c…貫通孔、19…連結ピン、20…四節リンク機構、P1…入力中心軸線、P2…固定ディスクの中心点、P3…揺動ディスクの中心点、Ra…P1とP2の距離、Rb…P2とP3の距離、R1…偏心量(P1とP3の距離)、θ2…揺動範囲。
【特許請求の範囲】
【請求項1】
車両の駆動源からの駆動力が伝達される中空の入力軸と、
該入力軸と平行に配置された出力軸と、
前記入力軸に偏心して設けられた固定ディスク、及び該固定ディスクに対して偏心して回転自在に設けられた揺動ディスクを有する複数の偏心機構と、
前記出力軸に揺動自在に軸支される複数の揺動リンクと、
該揺動リンクと前記出力軸との間に設けられ、前記出力軸に対して一方側に相対回転しようとするときに前記出力軸に該揺動リンクを固定し、他方側に相対回転しようとするときに前記出力軸に対して該揺動リンクを空転させる一方向回転阻止機構と、
一方の端部に前記偏心機構に回転自在に外嵌される大径環状部を有し、他方の端部が前記揺動リンクの揺動端部に連結されるコネクティングロッドと、
前記入力軸内に挿入されたピニオンシャフトとを備え、
前記入力軸には、前記固定ディスクの偏心方向に対向する個所に切欠孔が形成され、該切欠孔から前記ピニオンシャフトが露出し、
前記揺動ディスクには、前記入力軸及び前記固定ディスクを受け入れる受入孔が設けられ、
該受入孔を形成する前記揺動ディスクの内周面に内歯が形成され、
該内歯は、前記入力軸の切欠孔から露出する前記ピニオンシャフトと噛合し、
前記入力軸と前記ピニオンシャフトとを同一速度で回転させることにより、前記偏心機構の偏心量が維持され、前記入力軸と前記ピニオンシャフトの回転速度を異ならせることにより前記偏心機構の偏心量を変更させて、変速比を制御する無段変速機であって、
前記偏心機構の偏心量の変更のために相対回転位置が変化する2つの部材を備え、
該2つの部材の一方には突部を設け、他方には前記偏心量が0になるときに前記突部が当接する当接部を設けたことを特徴とする無段変速機。
【請求項2】
請求項1に記載の無段変速機において、
前記2つの部材の他方は、前記複数の偏心機構のうちの第1偏心機構であり、前記2つの部材の一方は、前記複数の偏心機構のうち前記第1偏心機構の隣に位置する第2偏心機構であり、
前記第2偏心機構には前記突部が前記第1偏心機構に向かって突出して設けられ、
前記第1偏心機構には前記当接部が設けられることを特徴とする無段変速機。
【請求項3】
請求項2に記載の無段変速機において、
前記ピニオンシャフトを回転駆動するための電動機を備え、
前記複数の偏心機構は少なくとも3つの偏心機構から構成され、
前記複数の偏心機構のうち最も電動機に近い偏心機構を前記第1偏心機構又は前記第2偏心機構とし、
前記最も電動機に近い偏心機構の隣に位置する偏心機構を前記第2偏心機構又は前記第1偏心機構とすることを特徴とする無段変速機。
【請求項4】
請求項1に記載の無段変速機において、
電動機と、
前記入力軸からの回転が入力される第1入力部材、前記電動機からの回転が入力される第2入力部材、及び前記ピニオンシャフトに回転を出力する出力部材を有する差動機構とを備え、
前記差動機構は、前記入力軸の回転速度と前記電動機の回転速度とが同一の場合には、前記ピニオンシャフトの回転速度が前記入力軸の回転速度と同一になり、前記入力軸の回転速度と前記電動機の回転速度とが異なる場合には、前記ピニオンシャフトの回転速度が前記入力軸の回転速度と異なるように構成され、
前記2つの部材は前記第1入力部材と前記出力部材であることを特徴とする無段変速機。
【請求項1】
車両の駆動源からの駆動力が伝達される中空の入力軸と、
該入力軸と平行に配置された出力軸と、
前記入力軸に偏心して設けられた固定ディスク、及び該固定ディスクに対して偏心して回転自在に設けられた揺動ディスクを有する複数の偏心機構と、
前記出力軸に揺動自在に軸支される複数の揺動リンクと、
該揺動リンクと前記出力軸との間に設けられ、前記出力軸に対して一方側に相対回転しようとするときに前記出力軸に該揺動リンクを固定し、他方側に相対回転しようとするときに前記出力軸に対して該揺動リンクを空転させる一方向回転阻止機構と、
一方の端部に前記偏心機構に回転自在に外嵌される大径環状部を有し、他方の端部が前記揺動リンクの揺動端部に連結されるコネクティングロッドと、
前記入力軸内に挿入されたピニオンシャフトとを備え、
前記入力軸には、前記固定ディスクの偏心方向に対向する個所に切欠孔が形成され、該切欠孔から前記ピニオンシャフトが露出し、
前記揺動ディスクには、前記入力軸及び前記固定ディスクを受け入れる受入孔が設けられ、
該受入孔を形成する前記揺動ディスクの内周面に内歯が形成され、
該内歯は、前記入力軸の切欠孔から露出する前記ピニオンシャフトと噛合し、
前記入力軸と前記ピニオンシャフトとを同一速度で回転させることにより、前記偏心機構の偏心量が維持され、前記入力軸と前記ピニオンシャフトの回転速度を異ならせることにより前記偏心機構の偏心量を変更させて、変速比を制御する無段変速機であって、
前記偏心機構の偏心量の変更のために相対回転位置が変化する2つの部材を備え、
該2つの部材の一方には突部を設け、他方には前記偏心量が0になるときに前記突部が当接する当接部を設けたことを特徴とする無段変速機。
【請求項2】
請求項1に記載の無段変速機において、
前記2つの部材の他方は、前記複数の偏心機構のうちの第1偏心機構であり、前記2つの部材の一方は、前記複数の偏心機構のうち前記第1偏心機構の隣に位置する第2偏心機構であり、
前記第2偏心機構には前記突部が前記第1偏心機構に向かって突出して設けられ、
前記第1偏心機構には前記当接部が設けられることを特徴とする無段変速機。
【請求項3】
請求項2に記載の無段変速機において、
前記ピニオンシャフトを回転駆動するための電動機を備え、
前記複数の偏心機構は少なくとも3つの偏心機構から構成され、
前記複数の偏心機構のうち最も電動機に近い偏心機構を前記第1偏心機構又は前記第2偏心機構とし、
前記最も電動機に近い偏心機構の隣に位置する偏心機構を前記第2偏心機構又は前記第1偏心機構とすることを特徴とする無段変速機。
【請求項4】
請求項1に記載の無段変速機において、
電動機と、
前記入力軸からの回転が入力される第1入力部材、前記電動機からの回転が入力される第2入力部材、及び前記ピニオンシャフトに回転を出力する出力部材を有する差動機構とを備え、
前記差動機構は、前記入力軸の回転速度と前記電動機の回転速度とが同一の場合には、前記ピニオンシャフトの回転速度が前記入力軸の回転速度と同一になり、前記入力軸の回転速度と前記電動機の回転速度とが異なる場合には、前記ピニオンシャフトの回転速度が前記入力軸の回転速度と異なるように構成され、
前記2つの部材は前記第1入力部材と前記出力部材であることを特徴とする無段変速機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−251609(P2012−251609A)
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願番号】特願2011−125315(P2011−125315)
【出願日】平成23年6月3日(2011.6.3)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成24年12月20日(2012.12.20)
【国際特許分類】
【出願日】平成23年6月3日(2011.6.3)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]