
無段変速機
【課題】簡易な構造で出力軸を360度回転させることが可能な無段変速機を提供する。
【解決手段】無段変速機は、少なくとも平面内で枢動可能に支持されているクランク24と、クランク24上に滑動可能に支持されている支点22と、支点22を平面内の少なくとも所定範囲内で任意の位置に移動させる駆動部と、を備える。駆動部は、支点22に対して枢動可能に連結された少なくとも二本のリンク部材12、14と、リンク部材の長さを伸縮させる伸縮機構とで構成される。リンク部材12、14の伸縮により支点22を移動させて、クランク24上での支点22の位置とクランク24の角度とを変えることで、クランクの回転と減速比とを制御する。
【解決手段】無段変速機は、少なくとも平面内で枢動可能に支持されているクランク24と、クランク24上に滑動可能に支持されている支点22と、支点22を平面内の少なくとも所定範囲内で任意の位置に移動させる駆動部と、を備える。駆動部は、支点22に対して枢動可能に連結された少なくとも二本のリンク部材12、14と、リンク部材の長さを伸縮させる伸縮機構とで構成される。リンク部材12、14の伸縮により支点22を移動させて、クランク24上での支点22の位置とクランク24の角度とを変えることで、クランクの回転と減速比とを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、リンクを利用する無段変速機に関する。
【背景技術】
【0002】
現在、ロボットの多くはアクチュエータとして電動モータを採用している。一般に、電動モータは回転数が大きい一方、トルクは小さいので、通常は減速機と組み合わせて用いられる。ロボットが負荷を受けた状態で安定的に変速できるように、変速機は連続的に減速比を変えられる無段変速機であることが望ましい。
【0003】
このような無段変速機として、例えば特許文献1には、互いにピボット軸に枢動自在に連結された第1及び第2のリンク要素で入力リンク部材を構成し、第1及び第2のリンク要素の間の角度を変えることで入力リンク部材のリンク長を連続的に変化可能なリンク式無段変速機が開示されている。これによると、負荷に応じてリンク要素間の角度を変えることで大きな減速比を得ることができるとされている。
【0004】
また、非特許文献1には、定速回転している原動軸へ互いに位相の異なる複数の偏心カムを設け、往復運動を取り出して一方クラッチへ導き、回転運動に再変換して共通の従動軸の出力回転とする無段変速機が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−090562号公報
【非特許文献】
【0006】
【非特許文献1】柏原学、無段変速機、日刊工業新聞社、1955、p.218−219
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の無段変速機では、比較的小型の構造で大きな減速比を得ることができるが、出力軸の可動範囲が制限されるという問題がある。また、非特許文献1の無段変速機では、必要な部品が多く、駆動力に脈動があり、一方向にしか回転できないという問題がある。
【0008】
本発明はこうした状況に鑑みてなされたものであり、その目的は、簡易な構造で出力軸を360度回転させることが可能な無段変速機を提供することにある。
【課題を解決するための手段】
【0009】
本発明の一態様は、少なくとも平面内で枢動可能に支持されているクランクと、前記クランク上に滑動可能に支持されている支点と、前記支点を平面内の少なくとも所定範囲内で任意の位置に移動させる駆動部と、前記駆動部により前記支点を移動させて、前記クランク上での前記支点の位置と前記クランクの角度とを変えることで、前記クランクを回転させる制御部と、を備える無段変速機である。
【0010】
この態様によると、クランク上での支点の位置を平面内で任意の位置に移動させることで、クランクを360度回転させることができる。また、クランク上での支点の位置を変えることで、クランクの回転速度比を無段階に変更することができる。
【0011】
なお、以上の構成要素を任意に組み合わせたもの、あるいは本発明の表現を方法、システムなどの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0012】
本発明の無段変速機によれば、簡易な構造で出力軸を360度回転させることができる。
【図面の簡単な説明】
【0013】
【図1】(a)、(b)は従来のクランク式無段変速機の構成を示す模式図である。
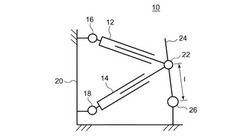
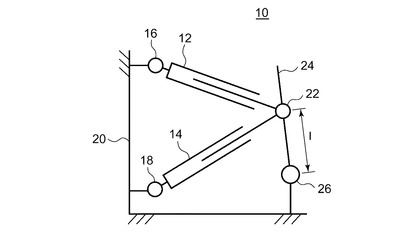
【図2】本発明の一実施形態に係る無段変速機の構成を示す模式図である。
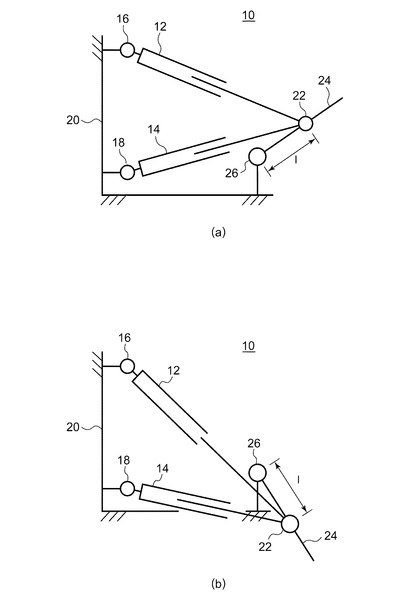
【図3】(a)、(b)は無段変速機における支点の移動を示す図である。
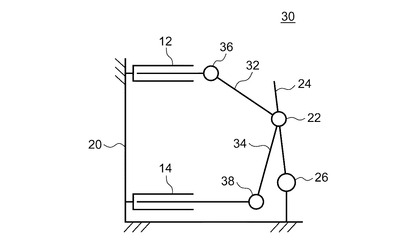
【図4】別の実施の形態に係る無段変速機の構成を示す模式図である。
【図5】さらに別の実施の形態に係る無段変速機の構成を示す模式図である。
【図6】さらに別の実施の形態に係る無段変速機の構成を示す模式図である。
【図7】さらに別の実施の形態に係る無段変速機の構成を示す模式図である。
【図8】図4で説明した実施形態に基づき作成された試作機の構造を示す図である。
【図9】試作機の運動学モデルを示す図である。
【図10】試作機におけるクランクの最大回転速度を計算したグラフである。
【図11】試作機におけるクランクの最大トルクを計算したグラフである。
【図12】無負荷状態でクランク角度の目標値を正弦関数的に変動させながら、クランク長さを変化させる実験の結果を示す図である。
【図13】クランクに負荷をかけた状態で、クランク角度の目標値を正弦関数的に変動させながら、クランク長さを変化させる実験の結果を示す図である。
【図14】無段変速機の変形例を示す模式図である。
【発明を実施するための形態】
【0014】
図1(a)は、従来のクランク式無段変速機80の構成を示す模式図である。クランク式無段変速機80は、三つのリンク部材84、86、88を備える。リンク部材84と86、および86と88は、互いに枢動自在に連結されるとともに、リンク部材84および88は、固定された基板90に対して枢動自在に取り付けられる。リンク部材84は伸縮機構82を有しており、一定の範囲で伸縮自在に構成される。
【0015】
無段変速機80では、リンク部材84を入力側、リンク部材88を出力側として用いる。図1(b)に示すように、リンク部材88を回転させると、リンク構造によってリンク部材84も回転する。このとき、伸縮機構82によりリンク部材84の長さを変化させることで、出力側の回転速度を変化させることができる。
【0016】
図1の無段変速機80では、クランクを一本のリンクで駆動する。このため、リンクとクランクが一直線上にならぶと、それ以上クランクを駆動することができない。このため、クランクの可動範囲は180度程度に制限されてしまう。
【0017】
図2は、本発明の一実施形態に係る無段変速機10の構成を示す模式図である。無段変速機10では、支点22がクランク24に対して滑動自在に取り付けられる。クランク24は、基板20に固定取付された枢動軸26によって枢動自在に保持される。支点22は、二本のリンク部材12、14と連結される。リンク部材12、14は伸縮機構を有しており、一定の範囲で伸縮自在に構成される。リンク部材12、14の一端は、基板20に固定取付された枢動軸16、18によってそれぞれ枢動自在に取り付けられる。リンク部材12、14の他端は、支点22に対して枢動自在に連結される。なお、リンク部材12、14およびクランク24は、紙面の平面内で回転するものとする。
【0018】
無段変速機10において、二本のリンク部材12、14の伸縮を入力として、クランク24の回転を出力として利用する。無段変速機10は、例えばロボットのアームやハンドの駆動系として適用される。
【0019】
上記の構成によると、伸縮可能なリンク部材12、14の一端を支点22と接続しているので、リンク部材12、14の長さを変えることで、支点22は、紙面の平面内で一定の範囲を自由に移動することができる。支点22はクランク24上に拘束されているので、支点22の運動によりクランク24が回転駆動される。この様子を、図3(a)、(b)に示す。支点22と枢動軸26の間の距離lが一定のまま、図2に示した状態から、リンク部材12、14を伸張させると、図3(a)に示す位置に支点22が移動する。リンク部材12を伸張させつつ、リンク部材14を短縮させると、図3(b)に示す位置に支点22が移動する。
【0020】
このように、無段変速機10を構成する各部材の配置と、リンク部材12、14の伸縮可能長さとを適宜調整することで、リンク部材12、14の伸縮動作のみで、枢動軸26の周りにクランク24を360度回転させることができる。本実施形態に係る無段変速機では、支点が互いに離間して固定された二つの伸縮部材と連結されているので、両方のリンク部材12、14とクランク24とが同時に一直線上に並ぶことはない。このため、図1の従来の無段変速機とは異なり、クランク24が枢動軸26に対して360度のいずれに位置した場合でも、支点22を介してクランク24に駆動力を伝達することができるため、クランクの360度の回転が実現される。支点22はクランク24上に拘束されているので、支点22の運動によりクランク24が回転駆動される。
【0021】
なお、図3から分かるように、クランク24を360度回転させるためには、支点22の移動可能範囲が枢動軸26の全周を含むようにリンク部材12、14の設置位置および伸縮長さを調整する必要がある。クランクを360度回転させる必要がない場合はこの限りでなく、所望の回転角度が得られるように支点22の移動可能範囲を調整すればよい。
【0022】
また、支点22を回転させるときに、クランク24上での支点22の固定位置、すなわち枢動軸26からの距離lを変えることで、支点22の移動速度、すなわちリンク部材12、14の伸縮速度に対するクランク24の回転速度比を変えることができる。すなわち、距離lが大きい場合は、リンク部材12、14の伸縮長さに対するクランク24の角度変化は比較的小さいのに対し、距離lが小さい場合は、リンク部材12、14の伸縮長さに対するクランク24の角度変化が比較的大きくなる。クランク24上の支点22の位置lは連続的に変えることができるので、クランク24の角速度も無段階に変えることができる。このようにして、図2の構成は無段変速機として機能する。
【0023】
上記に加え、本実施形態に係る無段変速機では、支点22を枢動軸26と一致させると、すなわちl=0となるように支点22を移動させると、リンク部材12、14からクランク24に力が伝達されない状態になる。つまり、クランク24を自由支持状態にすることができる。従来の減速機では、クラッチ等の機構が内蔵されていない限り、関節をフリーにすることはできないが、本発明では関節を受動状態と能動状態の両方にすることが容易に達成できる。この機能は、例えば無段変速機をロボットの脚の駆動系として適用し、脚を持ち上げたときに関節をフリーにするといった活用法が考えられる。
【0024】
なお、リンク部材の伸縮機構には、モータの出力軸に接続されたボールネジを使用することが好ましい。ボールネジはモータの減速機としても作用するので、伸縮機構としてボールネジを使用すると、減速機能と変速機能とを一体化できるという利点がある。しかしながら、クランク上の支点22を平面上のある範囲内で自在に移動できる限り、任意の装置を利用できる。
【0025】
図4は、別の実施の形態に係る無段変速機30の構成を示す模式図である。なお、各図において同一の符号を付された要素は、同一または同等の構成および機能を有するものとし、重複した説明は省略する。
【0026】
無段変速機30は、伸縮可能なリンク部材12、14を備える点、およびクランク24上に支点22が活動可能に取り付けられる点で、図2の無段変速機10と同様である。しかし、伸縮可能なリンク部材12、14の一端が基板20に対して固定されている点が異なる。リンク部材12、14の他端には枢動軸36、38が取り付けられ、それぞれ固定長のリンク部材32、34の一端が紙面の平面内で枢動自在に取り付けられる。そして、リンク部材32、34の他端が、支点22に対して枢動自在に連結される。
【0027】
この構成においても、リンク部材12、14を伸縮させることで、リンク部材32、34を介して支点22を平面上の一定範囲内で自由に移動することができる。したがって、図2の実施形態と同様に、クランク24の360度回転と無段階の変速とを実現することができる。
【0028】
図4の実施形態は、例えばボールネジ等で構成される伸縮機構を基板に固定した状態になるため、伸縮機構を枢動させる図1の実施形態と比べて、大型の伸縮機構の使用が可能になる。また、二台の伸縮機構を並置できるので、変速機を小型化しやすい。
【0029】
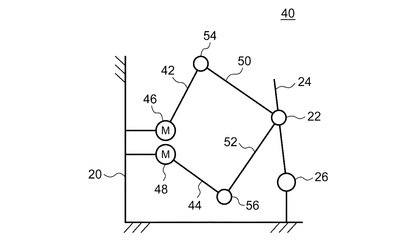
図5は、さらに別の実施の形態に係る無段変速機40の構成を示す模式図である。この実施形態では、クランク24上に拘束された支点22を移動させるために、伸縮機構ではなく回転機構を利用する。
【0030】
基板20に、モータ46、48が固定される。モータ46、48の出力軸には、カップリング等を介してそれぞれアーム42、44の一端が取り付けられる。アーム42、44の他端には、枢動軸54、56を介してリンク部材50、52の一端が枢動自在に連結される。リンク部材50、52の他端は、他の実施形態と同様に、支点22に対して枢動自在に連結される。支点22は、クランク24に対して滑動自在に取り付けられる。
【0031】
上記の構成において、モータ46、48の出力軸を回転させると、アーム42、44およびリンク部材50、52を介して、支点22を平面上の一定範囲内で自由に移動することができる。したがって、アームおよびリンク部材の長さを適宜調整することで、クランク24の360度回転と無段階の変速とを実現することができる。
【0032】
図5の実施形態は、直動の伸縮部材を適用できない場合に適している。例えば防塵等の観点から駆動系の密閉構造が求められる場合や、無段変速機の全長を短縮したい場合などが考えられる。
【0033】
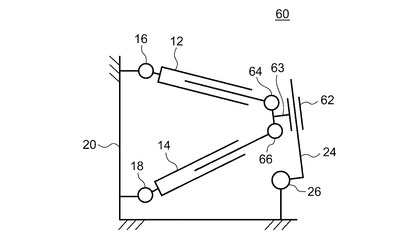
図6は、さらに別の実施の形態に係る無段変速機60の構成を示す模式図である。上述の実施形態では、クランク24に対する滑動とリンク部材に対する枢動とを一つの支点で行っていた。この実施形態では、クランク24に対する直線方向の滑動をスライダ62によって実現する。そして、スライダ62から延長形成された略T字形の部材63に二カ所の枢動軸64、66を取り付ける。伸縮可能なリンク部材12、14の一端は、図2の実施形態と同様に、基板20に対して枢動自在に取り付けられ、リンク部材12、14の他端が、略T字形部材63上の枢動軸64、66とそれぞれ枢動自在に連結される。この構成においても、リンク部材12、14を伸縮させることで、スライダ62を平面上の一定範囲内で自由に移動することができる。したがって、図2の実施形態と同様に、クランク24の360度回転と無段階の変速とを実現することができる。
【0034】
図6の実施形態は、リンク部材12、14の端部がクランク上の一部に集中せず互いを離して配置できるので、スライダ近辺の厚みを小さくでき、組み付けが容易になるという利点がある。
【0035】
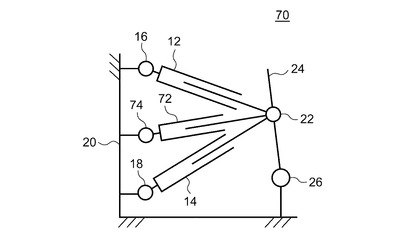
図7は、さらに別の実施の形態に係る無段変速機70の構成を示す模式図である。無段変速機70は、図2で説明した無段変速機10に対して、補助用のリンク部材72をさらに追加した構成を有する。他のリンク部材12、14と同様に、リンク部材72は伸縮機構を備え、一定の範囲で伸縮自在に構成される。リンク部材72の一端は枢動軸74によって基板20に対して枢動自在に取り付けられ、リンク部材72の他端は支点22に枢動自在に連結される。この構成によると、リンク部材一つ当たりの負荷が減り、支点22およびクランク24の剛性をさらに高めることができる。
【0036】
図7において、リンク部材12、14、72の一端を、基板20の平面上で三角形を構成するように配置してもよい。すなわち、リンク部材12、14、72が支点22を頂点とする三角錐の各辺を構成するように配置してもよい。このようにすると、クランク24を三次元的に回転できるとともに、クランク回転の脈動を小さくできる。
【0037】
なお、上述の実施形態は、適宜組み合わせることが可能である。例えば、図7の実施形態で説明した補助用のリンク部材は、図4、図6の実施の形態にも追加可能である。
【0038】
以上説明したように、本実施形態の無段変速機によれば、クランク上に滑動可能に保持された支点を、二本以上の伸縮可能なリンク部材と連結するようにした。二本以上のリンク部材の伸縮で支点を移動させるので、クランクの360度の回転が可能になり、従来のクランク式無段変速機における可動範囲の制約が解決される。
【0039】
また、クランク上の支点の位置を変えることで、リンク部材の伸縮速度に対するクランクの回転速度比を無段階に変更可能になる。したがって、一台の無段変速機で、低速高トルク、高速低トルクの両方の性能を容易に切り換えることができる。さらに、受動状態と能動状態とをも自由に切り換えることができる。
【0040】
従来のロボット用途では、遊星歯車装置や波動減速装置(ハーモニックドライブ)などの1/100から1/500程度の減速比を持つ減速装置が用いられることが多い。しかし、高減速比の減速装置を採用するロボットは、高負荷に耐えられる一方、無負荷状態であっても素早く動くことができないという欠点を有する。本実施形態の無段変速機をロボットに採用すれば、無負荷状態と高負荷状態が混在する動作を効率的に行うことが可能になる。
【0041】
また、従来の無段変速機と異なり、支点を閉ループにされたリンク部材で支持するので、出力軸の剛性が高くなる。
【0042】
さらに、従来自動車等で利用されている摩擦式や流体式の無段変速機と比較して、本発明の無段変速機は小型化が可能である。したがってロボットのアームやハンド等への適用も容易に実現できる。
【0043】
以下、本発明の試作機による実験結果について説明する。
【0044】
図8は、図4で説明した実施形態に基づき作成された試作機100の構造を示す。モータ106a、106bの出力軸は、遊星歯車で1/16に減速された後、ボールネジ110a、110bに接続される。ボールネジに取り付けられたナット112a、112bに、リンク部材116a、116bの一端がベアリングを介して枢動可能に連結される。リンク部材116a、116bの他端は、支点として機能するリニアガイド120に対し、ベアリングを介して枢動可能に連結される。リニアガイド120は、枢動軸124に支持されたクランク122上で滑動可能に保持される。さらに、ボールネジ110a、110bと平行にリニアガイド114a、114bを配置して、ナット112a、112bに係る横荷重を負担するようにされている。
【0045】
コンピュータおよびプログラム等で構成される制御部104は、ナット112a、112bの目標位置を計算し、モータ駆動部102a、102bからモータに対して駆動信号が与えられる。モータ106a、106bに取り付けられたエンコーダ108a、108bから回転角の情報が制御部104にフィードバックされ、これに基づき制御部104はモータを比例制御する。
【0046】
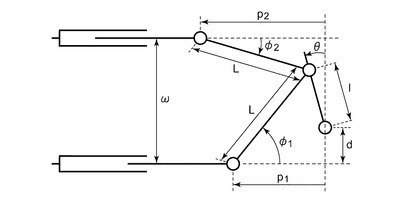
図9は、試作機100の運動学モデルを示す。図中、p1、p2はボールネジ110a、110bにおけるナット112a、112bのクランク枢動軸からの位置、θはクランク角度、lはクランクの枢動軸と支点間の距離、dはクランクの枢動軸とボールネジ110aの間の距離、Lはリンク部材の長さ、φ1、φ2はボールネジ軸に対するリンク部材116a、116bの角度である。
【0047】
なお、試作機100において、モータの最大連続トルクは23.5mNm、無負荷回転数は10200rpmであった。二つのボールネジの軸間距離w=80mm、ボールネジの軸を通る直線とクランク支点の距離d=20mm、リンク部材の長さL=89.4mmとした。リンク部材の長さは、二つのリングの相対角度が適当な範囲になるよう選択した。クランクの可動範囲は、θ=−60〜90deg、l=0〜40mmとなるように設計した。
【0048】
このとき、幾何学的な関係から次式が導かれる。
【数1】

角度θとクランク長さlの目標値を与えることで、制御部104は、式(1)、(2)を用いてボールネジにおけるナットの目標位置p1、p2を求め、これにしたがってモータを制御する。
【0049】
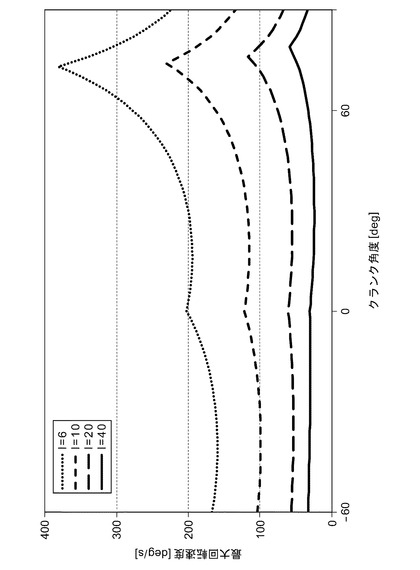
図10は、試作機100におけるクランクの最大回転速度を計算したグラフであり、図11は、クランクの最大トルクを計算したグラフである。これらのグラフでは、クランクの長さlを6mm、10mm、20mm、40mmにそれぞれ固定した状態で、クランクの角度θに対する最大回転速度、最大トルクが縦軸に表されている。
【0050】
図10から分かるように、クランク角度θによって値が変動するものの、クランク長さlが小さいほど最大回転速度が大きくなり、lが大きいほど最大回転速度が小さくなっている。また、図11から分かるように、クランク長さlが大きいほど最大トルクが大きくなり、lが小さいほど最大トルクが小さくなっている。このように、試作機100では、クランク長さlを変えることで減速比を変更できることが確認できた。
【0051】
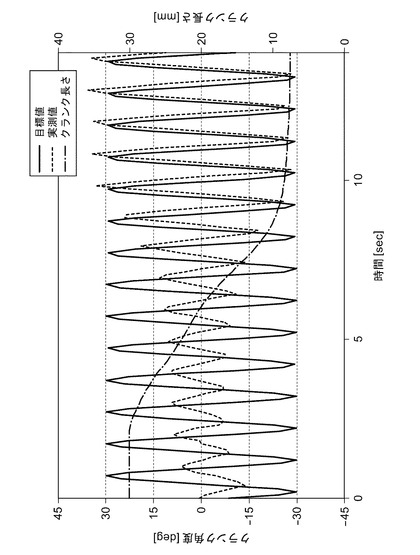
図12は、無負荷状態でクランク角度の目標値θを正弦関数的に変動させながら、クランク長さlを変化させる実験の結果を示す。この実験では、制御部104に、θ=30sin(2πt)[deg]を目標値として与えた。制御開始当初、クランク長さlが大きいときは、クランクは目標値の速い動きに追従できず、実測値の振幅は目標値よりも小さかった。しかし、クランク長さlを徐々に小さくして試作機100の減速比を小さくした結果、クランクが目標値に追従できるようになったことが分かる。
【0052】
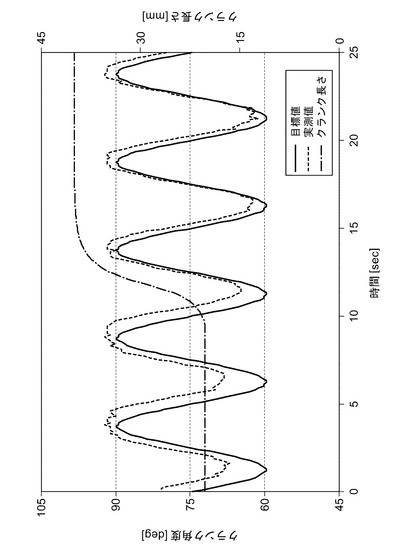
図13は、クランクに約15Nmの負荷を掛けた状態でクランク角度の目標値θを正弦関数的に変動させながら、クランク長さlを変化させる実験の結果を示す。この実験では、制御部104に、θ=15sin(2πt/5)+75[deg]を目標値として与えた。制御開始当初、クランク長さl=20mmのときは、負荷のためにクランクの動きが目標値に追従できなかったが、lを徐々に大きくして試作機100の減速比を上げた結果、クランクが目標値に追従できるようになったことが分かる。
【0053】
このように、本発明に係る無段変速機では、無負荷状態あるいは有負荷状態にかかわらず、素早い動作に対してもクランク長を制御中に変化させて減速比を変えることでクランクを追従させることができる。
【0054】
以上、本発明を実施の形態をもとに説明した。これらの実施の形態はあくまで例示であり、実施の形態どうしの任意の組み合わせ、実施の形態の各構成要素や各処理プロセスの任意の組み合わせなどの変形例もまた、本発明の範囲にあることは当業者に理解されるところである。
【0055】
本発明は、上述の各実施形態に限定されるものではなく、当業者の知識に基づいて各種の設計変更等の変形を加えることも可能である。各図に示す構成は、一例を説明するためのもので、同様な機能を達成できる構成であれば、適宜変更可能である。
【0056】
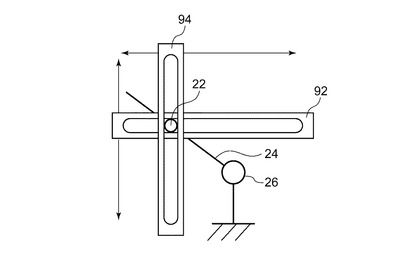
実施の形態では、伸縮部材としてボールネジを用いることを述べたが、クランク上の支点を平面上で自在に動かせる限り、任意の機構を駆動部として利用することができる。例えば、図14に示すように、中央部にガイド溝が空けられた、直交する二つのガイド板92、94で支点22を支持し、ガイド板92、94をそれぞれ図中の上下方向、左右方向に移動させるように無段変速機を構成してもよい。
【0057】
伸縮機構を備えるリンク部材の一方を、ばねで置換してもよい。この場合、クランク上の支点は、一つの伸縮自在なリンク部材により移動され、ばねはこれに従動して支点に対して引張力または反発力を与えるので、負荷感応型の変速機とすることができる。
【0058】
本発明の無段変速機は、ロボットに限らず、回転部分を持つ任意の装置、例えば巻き取り機などにも適用することができる。
【符号の説明】
【0059】
10 無段変速機、 12、14 リンク部材、 16 枢動軸、 22 支点、 24 クランク、 26 枢動軸、 30 無段変速機、 32 リンク部材、 36 枢動軸、 40 無段変速機、 42 アーム、 46 モータ、 50 リンク部材、 54 枢動軸、 60 無段変速機、 62 スライダ、 64 枢動軸、 70 無段変速機、 72 リンク部材、 74 枢動軸。
【技術分野】
【0001】
本発明は、リンクを利用する無段変速機に関する。
【背景技術】
【0002】
現在、ロボットの多くはアクチュエータとして電動モータを採用している。一般に、電動モータは回転数が大きい一方、トルクは小さいので、通常は減速機と組み合わせて用いられる。ロボットが負荷を受けた状態で安定的に変速できるように、変速機は連続的に減速比を変えられる無段変速機であることが望ましい。
【0003】
このような無段変速機として、例えば特許文献1には、互いにピボット軸に枢動自在に連結された第1及び第2のリンク要素で入力リンク部材を構成し、第1及び第2のリンク要素の間の角度を変えることで入力リンク部材のリンク長を連続的に変化可能なリンク式無段変速機が開示されている。これによると、負荷に応じてリンク要素間の角度を変えることで大きな減速比を得ることができるとされている。
【0004】
また、非特許文献1には、定速回転している原動軸へ互いに位相の異なる複数の偏心カムを設け、往復運動を取り出して一方クラッチへ導き、回転運動に再変換して共通の従動軸の出力回転とする無段変速機が開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2005−090562号公報
【非特許文献】
【0006】
【非特許文献1】柏原学、無段変速機、日刊工業新聞社、1955、p.218−219
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の無段変速機では、比較的小型の構造で大きな減速比を得ることができるが、出力軸の可動範囲が制限されるという問題がある。また、非特許文献1の無段変速機では、必要な部品が多く、駆動力に脈動があり、一方向にしか回転できないという問題がある。
【0008】
本発明はこうした状況に鑑みてなされたものであり、その目的は、簡易な構造で出力軸を360度回転させることが可能な無段変速機を提供することにある。
【課題を解決するための手段】
【0009】
本発明の一態様は、少なくとも平面内で枢動可能に支持されているクランクと、前記クランク上に滑動可能に支持されている支点と、前記支点を平面内の少なくとも所定範囲内で任意の位置に移動させる駆動部と、前記駆動部により前記支点を移動させて、前記クランク上での前記支点の位置と前記クランクの角度とを変えることで、前記クランクを回転させる制御部と、を備える無段変速機である。
【0010】
この態様によると、クランク上での支点の位置を平面内で任意の位置に移動させることで、クランクを360度回転させることができる。また、クランク上での支点の位置を変えることで、クランクの回転速度比を無段階に変更することができる。
【0011】
なお、以上の構成要素を任意に組み合わせたもの、あるいは本発明の表現を方法、システムなどの間で変換したものもまた、本発明の態様として有効である。
【発明の効果】
【0012】
本発明の無段変速機によれば、簡易な構造で出力軸を360度回転させることができる。
【図面の簡単な説明】
【0013】
【図1】(a)、(b)は従来のクランク式無段変速機の構成を示す模式図である。
【図2】本発明の一実施形態に係る無段変速機の構成を示す模式図である。
【図3】(a)、(b)は無段変速機における支点の移動を示す図である。
【図4】別の実施の形態に係る無段変速機の構成を示す模式図である。
【図5】さらに別の実施の形態に係る無段変速機の構成を示す模式図である。
【図6】さらに別の実施の形態に係る無段変速機の構成を示す模式図である。
【図7】さらに別の実施の形態に係る無段変速機の構成を示す模式図である。
【図8】図4で説明した実施形態に基づき作成された試作機の構造を示す図である。
【図9】試作機の運動学モデルを示す図である。
【図10】試作機におけるクランクの最大回転速度を計算したグラフである。
【図11】試作機におけるクランクの最大トルクを計算したグラフである。
【図12】無負荷状態でクランク角度の目標値を正弦関数的に変動させながら、クランク長さを変化させる実験の結果を示す図である。
【図13】クランクに負荷をかけた状態で、クランク角度の目標値を正弦関数的に変動させながら、クランク長さを変化させる実験の結果を示す図である。
【図14】無段変速機の変形例を示す模式図である。
【発明を実施するための形態】
【0014】
図1(a)は、従来のクランク式無段変速機80の構成を示す模式図である。クランク式無段変速機80は、三つのリンク部材84、86、88を備える。リンク部材84と86、および86と88は、互いに枢動自在に連結されるとともに、リンク部材84および88は、固定された基板90に対して枢動自在に取り付けられる。リンク部材84は伸縮機構82を有しており、一定の範囲で伸縮自在に構成される。
【0015】
無段変速機80では、リンク部材84を入力側、リンク部材88を出力側として用いる。図1(b)に示すように、リンク部材88を回転させると、リンク構造によってリンク部材84も回転する。このとき、伸縮機構82によりリンク部材84の長さを変化させることで、出力側の回転速度を変化させることができる。
【0016】
図1の無段変速機80では、クランクを一本のリンクで駆動する。このため、リンクとクランクが一直線上にならぶと、それ以上クランクを駆動することができない。このため、クランクの可動範囲は180度程度に制限されてしまう。
【0017】
図2は、本発明の一実施形態に係る無段変速機10の構成を示す模式図である。無段変速機10では、支点22がクランク24に対して滑動自在に取り付けられる。クランク24は、基板20に固定取付された枢動軸26によって枢動自在に保持される。支点22は、二本のリンク部材12、14と連結される。リンク部材12、14は伸縮機構を有しており、一定の範囲で伸縮自在に構成される。リンク部材12、14の一端は、基板20に固定取付された枢動軸16、18によってそれぞれ枢動自在に取り付けられる。リンク部材12、14の他端は、支点22に対して枢動自在に連結される。なお、リンク部材12、14およびクランク24は、紙面の平面内で回転するものとする。
【0018】
無段変速機10において、二本のリンク部材12、14の伸縮を入力として、クランク24の回転を出力として利用する。無段変速機10は、例えばロボットのアームやハンドの駆動系として適用される。
【0019】
上記の構成によると、伸縮可能なリンク部材12、14の一端を支点22と接続しているので、リンク部材12、14の長さを変えることで、支点22は、紙面の平面内で一定の範囲を自由に移動することができる。支点22はクランク24上に拘束されているので、支点22の運動によりクランク24が回転駆動される。この様子を、図3(a)、(b)に示す。支点22と枢動軸26の間の距離lが一定のまま、図2に示した状態から、リンク部材12、14を伸張させると、図3(a)に示す位置に支点22が移動する。リンク部材12を伸張させつつ、リンク部材14を短縮させると、図3(b)に示す位置に支点22が移動する。
【0020】
このように、無段変速機10を構成する各部材の配置と、リンク部材12、14の伸縮可能長さとを適宜調整することで、リンク部材12、14の伸縮動作のみで、枢動軸26の周りにクランク24を360度回転させることができる。本実施形態に係る無段変速機では、支点が互いに離間して固定された二つの伸縮部材と連結されているので、両方のリンク部材12、14とクランク24とが同時に一直線上に並ぶことはない。このため、図1の従来の無段変速機とは異なり、クランク24が枢動軸26に対して360度のいずれに位置した場合でも、支点22を介してクランク24に駆動力を伝達することができるため、クランクの360度の回転が実現される。支点22はクランク24上に拘束されているので、支点22の運動によりクランク24が回転駆動される。
【0021】
なお、図3から分かるように、クランク24を360度回転させるためには、支点22の移動可能範囲が枢動軸26の全周を含むようにリンク部材12、14の設置位置および伸縮長さを調整する必要がある。クランクを360度回転させる必要がない場合はこの限りでなく、所望の回転角度が得られるように支点22の移動可能範囲を調整すればよい。
【0022】
また、支点22を回転させるときに、クランク24上での支点22の固定位置、すなわち枢動軸26からの距離lを変えることで、支点22の移動速度、すなわちリンク部材12、14の伸縮速度に対するクランク24の回転速度比を変えることができる。すなわち、距離lが大きい場合は、リンク部材12、14の伸縮長さに対するクランク24の角度変化は比較的小さいのに対し、距離lが小さい場合は、リンク部材12、14の伸縮長さに対するクランク24の角度変化が比較的大きくなる。クランク24上の支点22の位置lは連続的に変えることができるので、クランク24の角速度も無段階に変えることができる。このようにして、図2の構成は無段変速機として機能する。
【0023】
上記に加え、本実施形態に係る無段変速機では、支点22を枢動軸26と一致させると、すなわちl=0となるように支点22を移動させると、リンク部材12、14からクランク24に力が伝達されない状態になる。つまり、クランク24を自由支持状態にすることができる。従来の減速機では、クラッチ等の機構が内蔵されていない限り、関節をフリーにすることはできないが、本発明では関節を受動状態と能動状態の両方にすることが容易に達成できる。この機能は、例えば無段変速機をロボットの脚の駆動系として適用し、脚を持ち上げたときに関節をフリーにするといった活用法が考えられる。
【0024】
なお、リンク部材の伸縮機構には、モータの出力軸に接続されたボールネジを使用することが好ましい。ボールネジはモータの減速機としても作用するので、伸縮機構としてボールネジを使用すると、減速機能と変速機能とを一体化できるという利点がある。しかしながら、クランク上の支点22を平面上のある範囲内で自在に移動できる限り、任意の装置を利用できる。
【0025】
図4は、別の実施の形態に係る無段変速機30の構成を示す模式図である。なお、各図において同一の符号を付された要素は、同一または同等の構成および機能を有するものとし、重複した説明は省略する。
【0026】
無段変速機30は、伸縮可能なリンク部材12、14を備える点、およびクランク24上に支点22が活動可能に取り付けられる点で、図2の無段変速機10と同様である。しかし、伸縮可能なリンク部材12、14の一端が基板20に対して固定されている点が異なる。リンク部材12、14の他端には枢動軸36、38が取り付けられ、それぞれ固定長のリンク部材32、34の一端が紙面の平面内で枢動自在に取り付けられる。そして、リンク部材32、34の他端が、支点22に対して枢動自在に連結される。
【0027】
この構成においても、リンク部材12、14を伸縮させることで、リンク部材32、34を介して支点22を平面上の一定範囲内で自由に移動することができる。したがって、図2の実施形態と同様に、クランク24の360度回転と無段階の変速とを実現することができる。
【0028】
図4の実施形態は、例えばボールネジ等で構成される伸縮機構を基板に固定した状態になるため、伸縮機構を枢動させる図1の実施形態と比べて、大型の伸縮機構の使用が可能になる。また、二台の伸縮機構を並置できるので、変速機を小型化しやすい。
【0029】
図5は、さらに別の実施の形態に係る無段変速機40の構成を示す模式図である。この実施形態では、クランク24上に拘束された支点22を移動させるために、伸縮機構ではなく回転機構を利用する。
【0030】
基板20に、モータ46、48が固定される。モータ46、48の出力軸には、カップリング等を介してそれぞれアーム42、44の一端が取り付けられる。アーム42、44の他端には、枢動軸54、56を介してリンク部材50、52の一端が枢動自在に連結される。リンク部材50、52の他端は、他の実施形態と同様に、支点22に対して枢動自在に連結される。支点22は、クランク24に対して滑動自在に取り付けられる。
【0031】
上記の構成において、モータ46、48の出力軸を回転させると、アーム42、44およびリンク部材50、52を介して、支点22を平面上の一定範囲内で自由に移動することができる。したがって、アームおよびリンク部材の長さを適宜調整することで、クランク24の360度回転と無段階の変速とを実現することができる。
【0032】
図5の実施形態は、直動の伸縮部材を適用できない場合に適している。例えば防塵等の観点から駆動系の密閉構造が求められる場合や、無段変速機の全長を短縮したい場合などが考えられる。
【0033】
図6は、さらに別の実施の形態に係る無段変速機60の構成を示す模式図である。上述の実施形態では、クランク24に対する滑動とリンク部材に対する枢動とを一つの支点で行っていた。この実施形態では、クランク24に対する直線方向の滑動をスライダ62によって実現する。そして、スライダ62から延長形成された略T字形の部材63に二カ所の枢動軸64、66を取り付ける。伸縮可能なリンク部材12、14の一端は、図2の実施形態と同様に、基板20に対して枢動自在に取り付けられ、リンク部材12、14の他端が、略T字形部材63上の枢動軸64、66とそれぞれ枢動自在に連結される。この構成においても、リンク部材12、14を伸縮させることで、スライダ62を平面上の一定範囲内で自由に移動することができる。したがって、図2の実施形態と同様に、クランク24の360度回転と無段階の変速とを実現することができる。
【0034】
図6の実施形態は、リンク部材12、14の端部がクランク上の一部に集中せず互いを離して配置できるので、スライダ近辺の厚みを小さくでき、組み付けが容易になるという利点がある。
【0035】
図7は、さらに別の実施の形態に係る無段変速機70の構成を示す模式図である。無段変速機70は、図2で説明した無段変速機10に対して、補助用のリンク部材72をさらに追加した構成を有する。他のリンク部材12、14と同様に、リンク部材72は伸縮機構を備え、一定の範囲で伸縮自在に構成される。リンク部材72の一端は枢動軸74によって基板20に対して枢動自在に取り付けられ、リンク部材72の他端は支点22に枢動自在に連結される。この構成によると、リンク部材一つ当たりの負荷が減り、支点22およびクランク24の剛性をさらに高めることができる。
【0036】
図7において、リンク部材12、14、72の一端を、基板20の平面上で三角形を構成するように配置してもよい。すなわち、リンク部材12、14、72が支点22を頂点とする三角錐の各辺を構成するように配置してもよい。このようにすると、クランク24を三次元的に回転できるとともに、クランク回転の脈動を小さくできる。
【0037】
なお、上述の実施形態は、適宜組み合わせることが可能である。例えば、図7の実施形態で説明した補助用のリンク部材は、図4、図6の実施の形態にも追加可能である。
【0038】
以上説明したように、本実施形態の無段変速機によれば、クランク上に滑動可能に保持された支点を、二本以上の伸縮可能なリンク部材と連結するようにした。二本以上のリンク部材の伸縮で支点を移動させるので、クランクの360度の回転が可能になり、従来のクランク式無段変速機における可動範囲の制約が解決される。
【0039】
また、クランク上の支点の位置を変えることで、リンク部材の伸縮速度に対するクランクの回転速度比を無段階に変更可能になる。したがって、一台の無段変速機で、低速高トルク、高速低トルクの両方の性能を容易に切り換えることができる。さらに、受動状態と能動状態とをも自由に切り換えることができる。
【0040】
従来のロボット用途では、遊星歯車装置や波動減速装置(ハーモニックドライブ)などの1/100から1/500程度の減速比を持つ減速装置が用いられることが多い。しかし、高減速比の減速装置を採用するロボットは、高負荷に耐えられる一方、無負荷状態であっても素早く動くことができないという欠点を有する。本実施形態の無段変速機をロボットに採用すれば、無負荷状態と高負荷状態が混在する動作を効率的に行うことが可能になる。
【0041】
また、従来の無段変速機と異なり、支点を閉ループにされたリンク部材で支持するので、出力軸の剛性が高くなる。
【0042】
さらに、従来自動車等で利用されている摩擦式や流体式の無段変速機と比較して、本発明の無段変速機は小型化が可能である。したがってロボットのアームやハンド等への適用も容易に実現できる。
【0043】
以下、本発明の試作機による実験結果について説明する。
【0044】
図8は、図4で説明した実施形態に基づき作成された試作機100の構造を示す。モータ106a、106bの出力軸は、遊星歯車で1/16に減速された後、ボールネジ110a、110bに接続される。ボールネジに取り付けられたナット112a、112bに、リンク部材116a、116bの一端がベアリングを介して枢動可能に連結される。リンク部材116a、116bの他端は、支点として機能するリニアガイド120に対し、ベアリングを介して枢動可能に連結される。リニアガイド120は、枢動軸124に支持されたクランク122上で滑動可能に保持される。さらに、ボールネジ110a、110bと平行にリニアガイド114a、114bを配置して、ナット112a、112bに係る横荷重を負担するようにされている。
【0045】
コンピュータおよびプログラム等で構成される制御部104は、ナット112a、112bの目標位置を計算し、モータ駆動部102a、102bからモータに対して駆動信号が与えられる。モータ106a、106bに取り付けられたエンコーダ108a、108bから回転角の情報が制御部104にフィードバックされ、これに基づき制御部104はモータを比例制御する。
【0046】
図9は、試作機100の運動学モデルを示す。図中、p1、p2はボールネジ110a、110bにおけるナット112a、112bのクランク枢動軸からの位置、θはクランク角度、lはクランクの枢動軸と支点間の距離、dはクランクの枢動軸とボールネジ110aの間の距離、Lはリンク部材の長さ、φ1、φ2はボールネジ軸に対するリンク部材116a、116bの角度である。
【0047】
なお、試作機100において、モータの最大連続トルクは23.5mNm、無負荷回転数は10200rpmであった。二つのボールネジの軸間距離w=80mm、ボールネジの軸を通る直線とクランク支点の距離d=20mm、リンク部材の長さL=89.4mmとした。リンク部材の長さは、二つのリングの相対角度が適当な範囲になるよう選択した。クランクの可動範囲は、θ=−60〜90deg、l=0〜40mmとなるように設計した。
【0048】
このとき、幾何学的な関係から次式が導かれる。
【数1】
角度θとクランク長さlの目標値を与えることで、制御部104は、式(1)、(2)を用いてボールネジにおけるナットの目標位置p1、p2を求め、これにしたがってモータを制御する。
【0049】
図10は、試作機100におけるクランクの最大回転速度を計算したグラフであり、図11は、クランクの最大トルクを計算したグラフである。これらのグラフでは、クランクの長さlを6mm、10mm、20mm、40mmにそれぞれ固定した状態で、クランクの角度θに対する最大回転速度、最大トルクが縦軸に表されている。
【0050】
図10から分かるように、クランク角度θによって値が変動するものの、クランク長さlが小さいほど最大回転速度が大きくなり、lが大きいほど最大回転速度が小さくなっている。また、図11から分かるように、クランク長さlが大きいほど最大トルクが大きくなり、lが小さいほど最大トルクが小さくなっている。このように、試作機100では、クランク長さlを変えることで減速比を変更できることが確認できた。
【0051】
図12は、無負荷状態でクランク角度の目標値θを正弦関数的に変動させながら、クランク長さlを変化させる実験の結果を示す。この実験では、制御部104に、θ=30sin(2πt)[deg]を目標値として与えた。制御開始当初、クランク長さlが大きいときは、クランクは目標値の速い動きに追従できず、実測値の振幅は目標値よりも小さかった。しかし、クランク長さlを徐々に小さくして試作機100の減速比を小さくした結果、クランクが目標値に追従できるようになったことが分かる。
【0052】
図13は、クランクに約15Nmの負荷を掛けた状態でクランク角度の目標値θを正弦関数的に変動させながら、クランク長さlを変化させる実験の結果を示す。この実験では、制御部104に、θ=15sin(2πt/5)+75[deg]を目標値として与えた。制御開始当初、クランク長さl=20mmのときは、負荷のためにクランクの動きが目標値に追従できなかったが、lを徐々に大きくして試作機100の減速比を上げた結果、クランクが目標値に追従できるようになったことが分かる。
【0053】
このように、本発明に係る無段変速機では、無負荷状態あるいは有負荷状態にかかわらず、素早い動作に対してもクランク長を制御中に変化させて減速比を変えることでクランクを追従させることができる。
【0054】
以上、本発明を実施の形態をもとに説明した。これらの実施の形態はあくまで例示であり、実施の形態どうしの任意の組み合わせ、実施の形態の各構成要素や各処理プロセスの任意の組み合わせなどの変形例もまた、本発明の範囲にあることは当業者に理解されるところである。
【0055】
本発明は、上述の各実施形態に限定されるものではなく、当業者の知識に基づいて各種の設計変更等の変形を加えることも可能である。各図に示す構成は、一例を説明するためのもので、同様な機能を達成できる構成であれば、適宜変更可能である。
【0056】
実施の形態では、伸縮部材としてボールネジを用いることを述べたが、クランク上の支点を平面上で自在に動かせる限り、任意の機構を駆動部として利用することができる。例えば、図14に示すように、中央部にガイド溝が空けられた、直交する二つのガイド板92、94で支点22を支持し、ガイド板92、94をそれぞれ図中の上下方向、左右方向に移動させるように無段変速機を構成してもよい。
【0057】
伸縮機構を備えるリンク部材の一方を、ばねで置換してもよい。この場合、クランク上の支点は、一つの伸縮自在なリンク部材により移動され、ばねはこれに従動して支点に対して引張力または反発力を与えるので、負荷感応型の変速機とすることができる。
【0058】
本発明の無段変速機は、ロボットに限らず、回転部分を持つ任意の装置、例えば巻き取り機などにも適用することができる。
【符号の説明】
【0059】
10 無段変速機、 12、14 リンク部材、 16 枢動軸、 22 支点、 24 クランク、 26 枢動軸、 30 無段変速機、 32 リンク部材、 36 枢動軸、 40 無段変速機、 42 アーム、 46 モータ、 50 リンク部材、 54 枢動軸、 60 無段変速機、 62 スライダ、 64 枢動軸、 70 無段変速機、 72 リンク部材、 74 枢動軸。
【特許請求の範囲】
【請求項1】
少なくとも平面内で枢動可能に支持されているクランクと、
前記クランク上に滑動可能に支持されている支点と、
前記支点を平面内の少なくとも所定範囲内で任意の位置に移動させる駆動部と、
前記駆動部により前記支点を移動させて、前記クランク上での前記支点の位置と前記クランクの角度とを変えることで、前記クランクを回転させる制御部と、
を備えることを特徴とする無段変速機。
【請求項2】
前記駆動部は、
前記支点に対して枢動可能に連結された少なくとも二本のリンク部材と、
前記リンク部材の長さを伸縮させる伸縮機構と、
を備えることを特徴とする請求項1に記載の無段変速機。
【請求項3】
前記駆動部は、
前記支点に対して枢動可能に連結された少なくとも二本のリンク部材と、
前記リンク部材とそれぞれ枢動可能に連結されたアームと、
前記アームとそれぞれ接続され該アームを平面内で回転させるモータと、
を備えることを特徴とする請求項1に記載の無段変速機。
【請求項4】
前記駆動部は、
前記支点に対して枢動可能に連結された三本のリンク部材と、
前記リンク部材の長さを伸縮させる伸縮機構と、を備え、
前記三本のリンク部材が、前記支点を頂点とする三角錐の辺を構成するように配置されることを特徴とする請求項1に記載の無段変速機。
【請求項1】
少なくとも平面内で枢動可能に支持されているクランクと、
前記クランク上に滑動可能に支持されている支点と、
前記支点を平面内の少なくとも所定範囲内で任意の位置に移動させる駆動部と、
前記駆動部により前記支点を移動させて、前記クランク上での前記支点の位置と前記クランクの角度とを変えることで、前記クランクを回転させる制御部と、
を備えることを特徴とする無段変速機。
【請求項2】
前記駆動部は、
前記支点に対して枢動可能に連結された少なくとも二本のリンク部材と、
前記リンク部材の長さを伸縮させる伸縮機構と、
を備えることを特徴とする請求項1に記載の無段変速機。
【請求項3】
前記駆動部は、
前記支点に対して枢動可能に連結された少なくとも二本のリンク部材と、
前記リンク部材とそれぞれ枢動可能に連結されたアームと、
前記アームとそれぞれ接続され該アームを平面内で回転させるモータと、
を備えることを特徴とする請求項1に記載の無段変速機。
【請求項4】
前記駆動部は、
前記支点に対して枢動可能に連結された三本のリンク部材と、
前記リンク部材の長さを伸縮させる伸縮機構と、を備え、
前記三本のリンク部材が、前記支点を頂点とする三角錐の辺を構成するように配置されることを特徴とする請求項1に記載の無段変速機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】

【図9】
【図10】
【図11】

【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−67809(P2012−67809A)
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願番号】特願2010−211335(P2010−211335)
【出願日】平成22年9月21日(2010.9.21)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ハーモニックドライブ
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
【公開日】平成24年4月5日(2012.4.5)
【国際特許分類】
【出願日】平成22年9月21日(2010.9.21)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.ハーモニックドライブ
【出願人】(304021417)国立大学法人東京工業大学 (1,821)
【Fターム(参考)】
[ Back to top ]