
無段変速機
【課題】ベルト挟持力が過大とならない無段変速機を提供する。
【解決手段】固定プーリ3aおよび可動プーリ3bとの接触半径が変更されるベルト4を備えた無段変速機1であって、可動プーリ3bを固定プーリ3a側へ付勢する推力を発生する弾性手段5と、V溝の溝幅が大きくなるように可動プーリ3bが軸部3cの軸方向に移動する場合に、弾性手段5による推力が増加することを抑制する推力低減機構6とを備え、推力低減機構6は、可動プーリ3bの背面側の軸部3cに設けられ弾性手段5が当接するストッパー16と、ストッパー16よりも固定プーリ3a側であり可動プーリ3bの背面側に設けられ、弾性手段5によって可動プーリ3bを固定プーリ3a側へ付勢する伝達手段11とを備え、V溝の溝幅が大きくなるように可動プーリ3bが軸方向に移動する場合に伝達手段11と弾性手段5との当接部位は可動プーリ3bに対して相対的に固定プーリ3a側へ移動する。
【解決手段】固定プーリ3aおよび可動プーリ3bとの接触半径が変更されるベルト4を備えた無段変速機1であって、可動プーリ3bを固定プーリ3a側へ付勢する推力を発生する弾性手段5と、V溝の溝幅が大きくなるように可動プーリ3bが軸部3cの軸方向に移動する場合に、弾性手段5による推力が増加することを抑制する推力低減機構6とを備え、推力低減機構6は、可動プーリ3bの背面側の軸部3cに設けられ弾性手段5が当接するストッパー16と、ストッパー16よりも固定プーリ3a側であり可動プーリ3bの背面側に設けられ、弾性手段5によって可動プーリ3bを固定プーリ3a側へ付勢する伝達手段11とを備え、V溝の溝幅が大きくなるように可動プーリ3bが軸方向に移動する場合に伝達手段11と弾性手段5との当接部位は可動プーリ3bに対して相対的に固定プーリ3a側へ移動する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は無段変速機に関するものである。
【背景技術】
【0002】
従来、固定プーリと、可動プーリとを備え、固定プーリと可動プーリとの間に形成されるV溝の幅を変更し、変速する無段変速機が特許文献1に開示されている。特許文献1に開示された無段変速機では、可動プーリの背面側にバネを設け、バネによる付勢力でVベルトをプーリによって保持している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−168080号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記の発明では、V溝の幅が狭い場合にプーリとVベルトとの間でベルト滑りが発生しないようにバネを設定すると、V溝の幅が広くなる場合にバネによる付勢力が過大となり、ベルト挟持力が過大となり、プーリ、またはVベルトが劣化する、といった問題点がある。
【0005】
本発明はこのような問題点を解決するために発明されたもので、バネによるベルト挟持力が過大となることを防止し、プーリ、またはVベルトが劣化することを抑制することを目的とする。
【課題を解決するための手段】
【0006】
本発明のある態様に係る無段変速機は、固定プーリと、固定プーリが連結された軸部の軸方向に移動する可動プーリと、固定プーリと可動プーリとによって形成されるV溝の溝幅が変更されることで、固定プーリおよび可動プーリとの接触半径が変更されるベルトとを備えた無段変速機であって、可動プーリを固定プーリ側へ付勢する推力を発生する弾性手段と、V溝の溝幅が大きくなるように可動プーリが軸部の軸方向に移動する場合に、弾性手段による推力が増加することを抑制する推力低減機構とを備え、推力低減機構は、可動プーリの背面側の軸部に設けられ、弾性手段の一方の端部が当接する第1ストッパーと、第1ストッパーよりも固定プーリ側であり、可動プーリの背面側に設けられ、弾性手段のもう一方の端部が当接し、弾性手段による推力を可動プーリに伝達する伝達手段とを備え、V溝の溝幅が大きくなるように可動プーリが軸方向に移動する場合に、伝達手段と弾性手段との当接部位は、可動プーリに対して相対的に固定プーリ側へ移動する。
【発明の効果】
【0007】
この態様によると、V溝の溝幅が大きくなるように可動プーリが軸方向に移動した場合に、弾性手段が当接する伝達手段が可動プーリに対して相対的に固定プーリ側へ移動するので、ベルト挟持力が過大となることを防止することができ、ベルト、またはプーリの劣化を抑制することができる。
【図面の簡単な説明】
【0008】
【図1】第1実施形態の無段変速機の概略断面図である。
【図2】図1のII-II断面における概略図である。
【図3】図2のIII-III断面におけるセカンダリプーリの概略構成図である。
【図4】第1実施形態の突出部を示す概略図である。
【図5】第1実施形態の突出部を展開した場合の概略図である。
【図6】突出部の変形例を示す図である。
【図7】突出部の変形例を示す図である。
【図8】突出部の変形例を示す図である。
【図9】突出部の変形例を示す図である。
【図10】第2実施形態のセカンダリプーリの概略断面図である。
【図11】第3実施形態のセカンダリプーリの概略断面図である。
【発明を実施するための形態】
【0009】
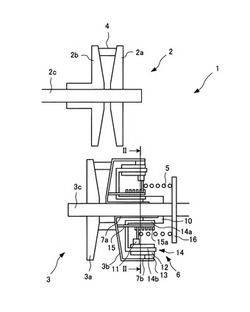
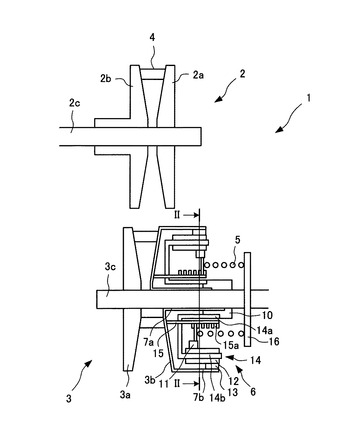
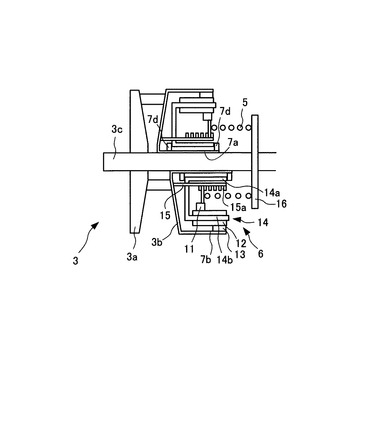
本発明の第1実施形態の無段変速機について図1、図2を用いて説明する。図1は本実施形態の無段変速機の概略断面図である。図1のセカンダリプーリは無段変速機の変速比が最Highとなっている状態と、最Lowとなっている状態を示している。図2は図1のII-II断面における概略図である。図2では無段変速機の変速比が最Lowとなっている状態を示している。
【0010】
本実施形態の無段変速機1は、プライマリプーリ2と、セカンダリプーリ3と、ベルト4と、バネ5と、推力低減機構6とを備える。
【0011】
プライマリプーリ2は、固定プーリ2aと、固定プーリ2aに対向配置された可動プーリ2bと、軸部2cとを備える。プライマリプーリ2は、固定プーリ2aのシーブ面と可動プーリ2bのシーブ面とによってV字状のプーリ溝を形成する。可動プーリ2bは、例えば遠心ローラーによって軸部2cに沿って移動し、プーリ溝の溝幅を変更する。
【0012】
セカンダリプーリ3は、固定プーリ3aと、固定プーリ3aに対向配置された可動プーリ3bと、軸部3cとを備える。セカンダリプーリ3は、固定プーリ3aのシーブ面と可動プーリ3bのシーブ面とによってV字状のプーリ溝を形成する。可動プーリ3bは、周方向においては軸部3cと共に回転し、軸方向においては軸部3cに対して移動可能となるように配置されている。
【0013】
可動プーリ3bは、軸部3cに摺接し、固定プーリ3aとは反対側に延設される第1円筒部7aと、可動プーリ3bの径方向外側の外周端から固定プーリ3aとは反対側に延設される第2円筒部7bと、第1円筒部7aの外周壁から径方向外側に突出する保持部7dとを備える。
【0014】
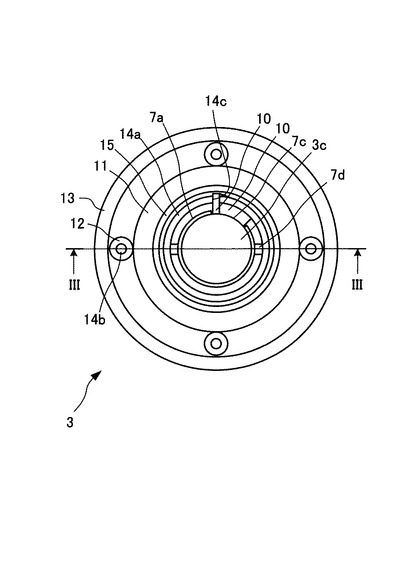
第1円筒部7aには、固定プーリ3aとは反対側の端部から固定プーリ3a側に向けて切欠部7cが形成される。切欠部7cは、可動プーリ3bが軸方向に移動した場合に、第1円筒部7aが後述する突出部10に接触しないように形成される。保持部7dは、図3に示すように後述するキャリア14を軸方向において挟持するように配置され、キャリア14の軸方向への移動を規制する。図3は、図2のIII-III断面におけるセカンダリプーリ3の概略図であり、変速比が最Highとなっている状態と、最Lowとなっている状態とを示している。保持部7dは、キャリア14の周方向への回転は規制しない。
【0015】
可動プーリ3bは、ベルト4によって可動プーリ3bを固定プーリ3aとは反対側に押す力と、バネ5によって固定プーリ3a側に押す力との差によって軸部3cの軸方向に沿って移動し、プーリ溝の溝幅を変更する。
【0016】
セカンダリプーリ3では、可動プーリ3bをバネ5によって固定プーリ3a側へ押す推力によって、ベルト挟持力が発生する。
【0017】
ベルト4はプライマリプーリ2とセカンダリプーリ3との間に掛け回され、プライマリプーリ2とセカンダリプーリ3との間で動力を伝達する。プライマリプーリ2とベルト4との接触半径、およびセカンダリプーリ3とベルト4との接触半径が変更されることで、無段変速機1は、変速比を無段階に変更する。
【0018】
推力低減機構6は、突出部10と、サンギア11と、ピニオンギア12と、リングギア13と、キャリア14と、第3円筒部15と、ストッパー16とを備えた遊星歯車機構である。
【0019】
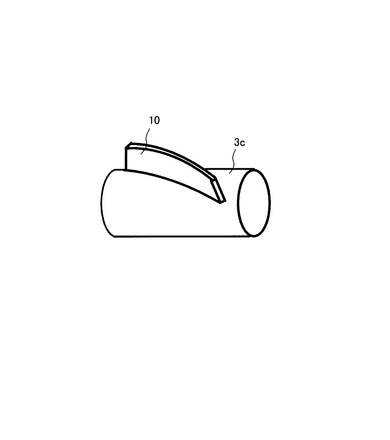
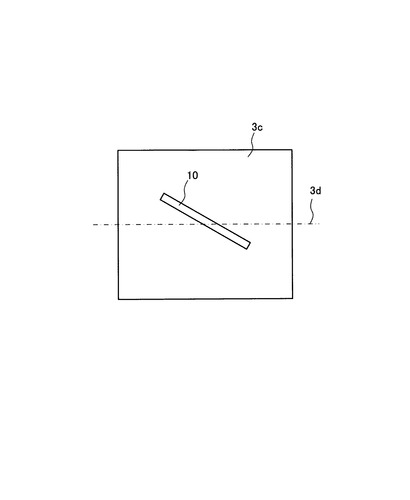
突出部10は、可動プーリ3bの背面側の軸部3cに設けられ、軸部3cから径方向外側に突出し、軸方向に延設される。突出部10は図4に示すように螺旋状に形成される。突出部10を平面に展開すると、突出部10は図5に示すように軸部3cの軸3dに対して傾斜した直線形状となる。可動プーリ3bの背面とは、固定プーリ3aと向かい合う面の裏側の面をいう。
【0020】
第3円筒部15は、突出部10よりも径方向外側に設けられ、軸方向に延設される。第3円筒部15の固定プーリ3a側の端部は、可動プーリ3bの背面に連結する。第3円筒部15の外周壁にはサンギア11が螺合する第1溝15aが螺旋状に形成される。第1溝15aは、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、サンギア11が周方向に回転しながら固定プーリ3a側へ移動するように形成される。
【0021】
サンギア11は、径方向内側の端部が第3円筒部15の第1溝15aに螺合し、径方向外側に歯車が形成された外歯車である。サンギア11は、第1溝15aに沿って回転可能となっており、ピニオンギア12の歯車と噛み合う。サンギア11は、ピニオンギア12の歯車に噛み合いながら軸方向へ移動可能となる。サンギア11は、バネ5の固定プーリ3a側の端部と当接し、バネ5による弾性力を可動プーリ3bに伝達し、可動プーリ3bを固定プーリ3a側へ付勢する。
【0022】
ピニオンギア12は、径方向内側でサンギア11の歯車に噛み合い、径方向外側でリングギア13の歯車に噛み合う。ピニオンギア12は、キャリア14によって径方向の移動が規制され、キャリア14と共に周方向に公転する。また、ピニオンギア12は、キャリア14の軸部14bを中心に自転する。ピニオンギア12は、ピニオンギア12とサンギア11とが噛み合った状態でサンギア11が軸方向に移動可能となるように軸方向に延設して設けられる。
【0023】
キャリア14は、径方向内側で軸方向に延設する螺合部14aと、ピニオンギア12を軸支する軸部14bとを備える。螺合部14aは、可動プーリ3bの第1円筒部7aと第3円筒部15との間に設けられ、突出部10に螺合する第2溝14cが形成される。第2溝14cは、突出部10の形状に沿って螺旋状に形成される。キャリア14は、保持部7dによって軸方向における移動が規制され、軸方向においては可動プーリ3bと共に移動する。しかし、周方向の回転については保持部7dによって規制されておらず、キャリア14は、可動プーリ3bに対して相対的に回転可能となっている。キャリア14は、可動プーリ3bと共に軸方向へ移動すると、突出部10に沿って周方向に回転する。つまり、キャリア14は、軸方向に移動すると、軸部3c、および可動プーリ3bに対して相対的に周方向に回転する。
【0024】
リングギア13は、可動プーリ3bの第2円筒部7bの内周壁に設けられ、ピニオンギア12に噛み合う内歯車である。リングギア13は、可動プーリ3bと共に回転する。可動プーリ3bが軸方向に移動すると、キャリア14はリングギア13に対しても相対的に周方向に回転する。
【0025】
ストッパー16は、可動プーリ3bの背面側に設けられ、軸部3cから径方向外側に向けて突出する。ストッパー16は、サンギア11に当接する端部とは反対側のバネ5の端部が当接する。
【0026】
バネ5は、一方の端部がサンギア11に当接し、もう一方の端部がストッパー16に当接し、サンギア11を固定プーリ3a側へ付勢する推力を発生させ、固定プーリ3aおよび可動プーリ3bによってベルト4を保持するベルト挟持力を発生させる。バネ5は、変速比が最Lowの場合にベルト滑りが発生しないベルト挟持力を発生するように設定されている。
【0027】
本実施形態の作用について説明する。
【0028】
無段変速機1の変速比がHigh側へ変更される場合には、可動プーリ3bのプーリ溝の幅が広くなるように、可動プーリ3bが軸方向に移動する。可動プーリ3bが軸方向に移動すると、突出部10に沿ってキャリア14は周方向に回転する。キャリア14は可動プーリ3bに対して相対的に周方向へ回転する。リングギア13は、可動プーリ3bに固定されており、キャリア14が周方向へ回転することによって、ピニオンギア12が回転し、サンギア11も回転する。サンギア11の径方向内側の端部は、可動プーリ3bに固定された第3円筒部15の第1溝15aに螺合している。そのため、サンギア11は、第1溝15aに沿って移動し、周方向に回転しながら固定プーリ3a側に移動する。
【0029】
つまり、プーリ溝の幅が広くなるように可動プーリ3bが軸方向に移動すると、サンギア11は軸方向における可動プーリ3bの移動方向とは反対方向に移動する。バネ5の一方の端部はサンギア11と当接しており、バネ5のもう一方の端部はストッパー16に当接している。そのため、プーリ溝の幅が広くなるように軸方向に可動プーリ3bが移動すると、バネ5の長さは長くなり、バネ5による可動プーリ3bの推力が小さくなる。
【0030】
また、遊星歯車機構によってキャリア14を介して入力される回転速度に対して、サンギア11で出力される回転速度は増速され、推力低減機構6は増速機構としての機能を有する。
【0031】
本発明の第1実施形態の効果について説明する。
【0032】
セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、バネ5が可動プーリ3bを固定プーリ3a側へ付勢する推力を低減する推力低減機構6を備える。バネ5の一方の端部はセカンダリプーリ3の軸部3cに設けたストッパー16に当接し、バネ5のもう一方の端部はサンギア11に当接する。セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、サンギア11は、可動プーリ3bに対して相対的に固定プーリ3a側へ移動する。これによって、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、バネ5による可動プーリ3bを固定プーリ3a側へ付勢する推力が増加することを防止することができる。例えば、変速比がLow側となっている場合に必要なベルト挟持力が大きい場合には、必要なベルト挟持力にあわせてバネ5を設定し、変速比がHigh側となった場合にベルト挟持力が過大となることを防止することができる。そのため、変速比がHigh側となった場合に、ベルト、またはセカンダリプーリ3の耐久性が低下することを抑制することができる(請求項1に対応する効果)。
【0033】
本実施形態を用いずにセカンダリプーリのプーリ溝の幅が大きくなるように可動プーリが軸方向に移動する場合に、バネおよびストッパーを可動プーリの移動方向と同じ方向に移動させることで、ベルト挟持力が過大となることを防止することも可能であるが、バネおよびストッパーを移動させるためのスペースが軸方向に必要となり、軸方向の長さが長くなる。本実施形態では、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、サンギア11を可動プーリ3bに対して相対的に固定プーリ3a側へ移動させることで、バネ5およびストッパー16を移動させるために必要なスペースを設ける必要が無く、無段変速機1の軸方向の長さを短くすることができ、無段変速機1を小型化することができる(請求項1に対応する効果)。
【0034】
軸部3cに螺旋状の突出部10を設け、キャリア14の螺合部14aに突出部10と螺合する第2溝14cを形成する。サンギア11はピニオンギア12に対して軸方向に移動可能に噛み合う。これにより、可動プーリ3bが軸方向に移動した場合に、キャリア14、ピニオンギア12が周方向に回転し、サンギア11は第1溝15aに沿って周方向に回転し、かつ軸方向に移動する。このように、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、機械式機構によってサンギア11を可動プーリ3bに対して相対的に固定プーリ3a側へ移動させることできる(請求項2に対応する効果)。
【0035】
キャリア14の周方向への回転を増速してサンギア11に伝達することで、可動プーリ3bの軸方向への移動量に対するサンギア11の軸方向への移動量を大きくすることができ、ベルト挟持力が過大となることをさらに防止することができる(請求項3に対応する効果)。
【0036】
推力低減機構6を遊星歯車機構、特にシングルピニオン遊星歯車機構とし、ピニオンギア12は可動プーリ3bに固定されたリングギア13に噛み合い、サンギア11は可動プーリ3bに固定された第3溝15cに螺合する。これにより、セカンダリプーリのプーリ溝の幅が大きくなるように可動プーリが軸方向に移動する場合に、部品点数が少ない機械式機構によって可動プーリ3bの軸方向への移動に対してサンギア11を相対的に固定プーリ3a側へ移動させることできる(請求項4、5に対応する効果)。
【0037】
突出部10を展開した場合に、突出部10が軸部3cの軸線3dに対して傾斜した直線形状となるように突出部10を設けることで、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、可動プーリ3bの軸方向への移動量に応じてベルト挟持力を小さくすることができる(請求項6に対応する効果)。
【0038】
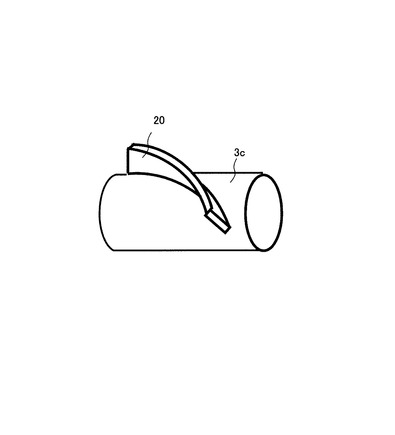
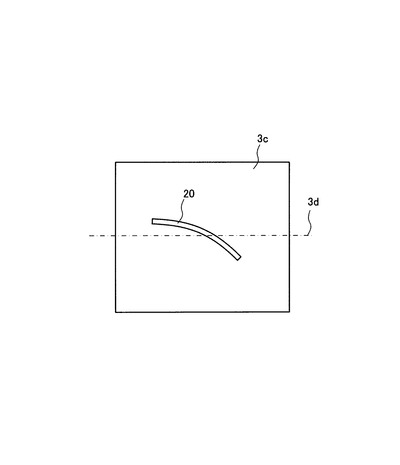
本実施形態では、突出部10は図5に示すように展開した場合に図が直線形状となるが、図6、7に示す形状としてもよい。図6は突出部の変形例であり、図7は図6の突出部20の展開図である。突出部20を展開した場合に、突出部20は曲線形状となる。これにより、展開図では突出部が直線形状となる場合と比較して、変速比がLow側の場合にはベルト挟持力の低減量が小さく、変速比がHigh側の場合にはベルト挟持力の低減量が大きくなる。
【0039】
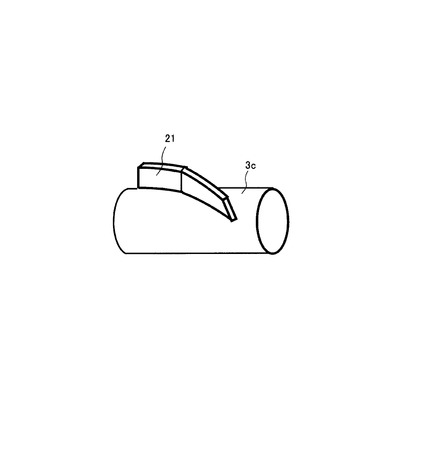
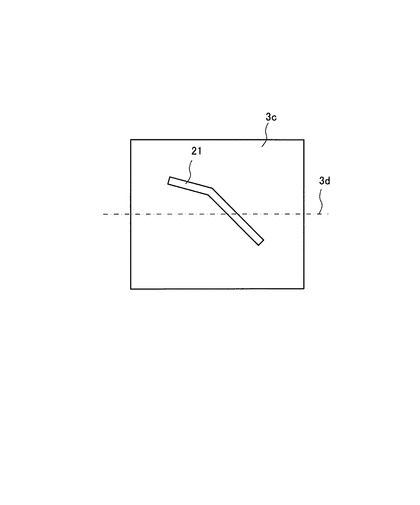
また、突出部のさらなる変形例を図8、9に示す。図8は突出部の変形例であり、図9は図8の突出部21の展開図である。突出部21を展開した場合に、突出部21は傾きが異なる複数の直線形状の突出部を連結した形状となる。これにより、突出部21の形状に応じてベルト挟持力の低減量を調整することができる。
【0040】
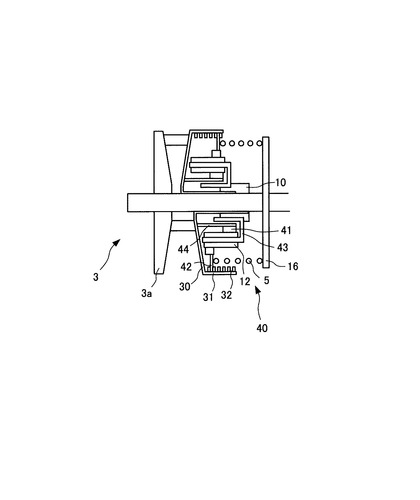
次に本発明の第2実施形態の無段変速機について図10を用いて説明する。図10は、本実施形態のセカンダリプーリの概略断面図である。図10では無段変速機の変速比が最Highとなっている状態と、最Lowとなっている状態とを示している。
【0041】
本実施形態は、第1実施形態と比較して主に推力低減機構が異なっている。第2実施形態については第1実施形態と異なる部分を中心に説明する。第1実施形態と同じ構成は、第1実施形態と同じ符号を付し、ここでの説明は省略する。
【0042】
推力低減機構40は、突出部10と、サンギア41と、ピニオンギア12、リングギア42と、キャリア43と、第3円筒部44と、ストッパー16とを備えた遊星機構である。
【0043】
サンギア41は、可動プーリ30に固定された第3円筒部44の外周壁に連結された外歯車である。
【0044】
リングギア42は、ピニオンギア12に噛み合う内歯車であり、リングギア42の外周端部は可動プーリ30の第2円筒部31に設けた第3溝32に螺合する。
【0045】
バネ5は、一方の端部がストッパー16に当接しており、もう一方の端部はリングギア42に当接している。
【0046】
本実施形態の作用について説明する。
【0047】
可動プーリ30が、プーリ溝の幅が広くなるように軸方向に移動すると、突出部10に沿ってキャリア43は周方向に回転する。サンギア41は可動プーリ30に固定されており、キャリア43の周方向への回転によって、ピニオンギア12が回転し、リングギア42も回転する。リングギア42の径方向外側の端部は、可動プーリ30の第2円筒部31に形成された第3溝32に螺合している。そのため、リングギア42は、第3溝32に沿って移動し、周方向に回転しながら固定プーリ3a側に移動する。
【0048】
本実施形態では、プーリ溝の幅が広くなるように可動プーリ30が軸方向に移動すると、リングギア42は軸方向における可動プーリ30の移動方向とは反対方向に移動する。
【0049】
本発明の第2実施形態の効果について説明する。
【0050】
本実施形態では、第1実施形態と比較して、可動プーリ30の軸方向への移動量に対するリングギア42の移動量を小さくすることができ、ベルト挟持力の低減力量を小さくすることができる。つまり、第1実施形態、第2実施形態の構成とすることで、可動プーリ3bの軸方向への移動量に対して、遊星歯車機構の形態、突出部10の形状、ギアの歯数を組み合わせることで、可動プーリ3bの軸方向への移動量に対するベルト挟持力の自由度を増すことができる。
【0051】
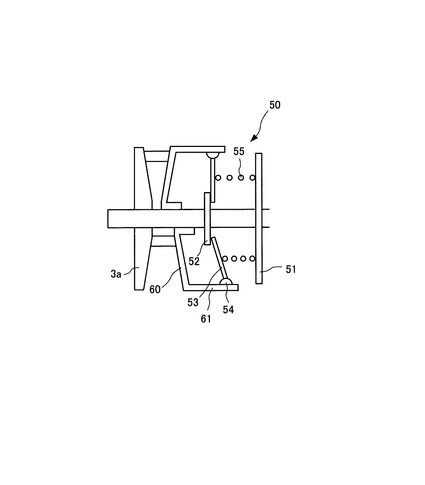
本発明の第3実施形態の無段変速機について図11を用いて説明する。図11は本実施形態のセカンダリプーリの概略構成図であり、無段変速機の変速比が最Highとなっている場合と変速比が最Lowとなっている場合を示している。
【0052】
本実施形態の無段変速機は、第3実施形態については第1実施形態と異なる部分を中心に説明する。第1実施形態と同じ構成は、第1実施形態と同じ符号を付し、ここでの説明は省略する。
【0053】
推力低減機構50は、第1ストッパー51と、第2ストッパー52と、回動部53と、連結部54とを備える。
【0054】
第1ストッパー51は、軸部3cから径方向外側に突出する。第1ストッパー51は、バネ55の一方の端部が当接する。
【0055】
第2ストッパー52は、第1ストッパー51よりも可動プーリ60側に位置し、径方向外側に突出する。第2ストッパー52は、回動部53の一部が当接する。第1ストッパー51と第2ストッパー52との間の距離は、可動プーリ60が軸方向に移動しても変わらない。
【0056】
回動部53は、可動プーリ60の第2円筒部61の内周壁に連結部54を介して連結され、連結部54を中心に回動する。回動部53は、径方向内側の端部側で第2ストッパー52およびバネ55に当接する。第2ストッパー52、回動部53、バネ55は固定プーリ3a側から第2ストッパー52、回動部53、バネ55の順番に配置される。つまり、回動部53は、径方向内側の端部付近で固定プーリ3a側の面または端部が第2ストッパー52に当接し、反対側の面がバネ55に当接する。
【0057】
本実施形態の作用について説明する。
【0058】
変速比が最Lowとなっている場合、つまり可動プーリ60のプーリ溝の幅が最小となっている場合には、第1ストッパー51と回動部53とは略並行となっている。変速比がHigh側へ変更され、可動プーリ60のプーリ溝の幅が大きくなるように可動プーリ60が軸方向に移動すると、連結部54は可動プーリ60と共に軸方向に移動する。回動部53は、バネ55によって固定プーリ3a側に向けて付勢されているので、回動部53は連結部54を中心として回動する。回動部53の径方向内側の端部は、第2ストッパー52と当接しており、回動部53の径方向内側の端部が第2ストッパー52よりも固定プーリ3a側へ移動することはない。このように可動プーリ60が軸方向に移動すると、回動部53が回動し、バネ55の収縮を低減することができる。
【0059】
バネ55による付勢力は、回動部53、連結部54を介して可動プーリ60に作用し、この付勢力によって可動プーリ60はベルト4を挟持する。そのため、バネ55によるベルト挟持力は、バネ55と回動部53との当接部が径方向外側、つまり連結部54側となるにつれて大きくなる。バネ55と回動部53との当接位置を変えることで、可動プーリ60の位置が同じでも、バネ55によるベルト挟持力は異なっている。つまり、バネ55と回動部53との当接位置を変えることで、ベルト挟持力を変更することができる。
【0060】
本発明の第3実施形態の効果について説明する。
【0061】
回動部53は、可動プーリ60の連結した連結部54を介して回動可能となっており、径方向内側の端部が軸部3cに設けられた第2ストッパー52に当接する。プーリ溝が大きくなるように可動プーリ60が軸方向に移動する場合に、回動部63は、連結部54を介して回動し、回動部63を介して可動プーリ60を固定プーリ3a側へ付勢するバネ55の収縮を低減することができる。そのため、プーリ溝の幅が大きくなるように可動プーリ60が軸方向に移動する場合に、バネ55による可動プーリ60を固定プーリ3a側へ付勢する推力が増加することを抑制することができる(請求項9に対応する効果)。
【0062】
本発明は上記した実施形態に限定されるものではなく、その技術的思想の範囲内でなしうるさまざまな変更、改良が含まれることは言うまでもない。
【0063】
上記実施形態では、推力低減機構6としてシングルピニオン遊星歯車機構を用いたが、ダブルピニオン遊星歯車機構を用いても良い。ダブルピニオン遊星歯車機構を用いることで、キャリアの回転の増速を大きくすることができる。
【0064】
上記実施形態では、保持部7dは図2における水平方向に2つ設けられているが、保持部7dの個数や配置は上記実施形態に限られることはない。
【符号の説明】
【0065】
1 無段変速機
3a 固定プーリ
3b、30 可動プーリ
3c 軸部
4 ベルト
5、55 バネ(弾性手段)
6、40、50 推力低減機構
10 突出部(第1螺合手段)
11 サンギア(伝達手段)
12 ピニオンギア(第2螺合手段)
13 リングギア
14、43 キャリア(第2螺合手段)
15 第3円筒部(第3螺合手段)
16 ストッパー(第1ストッパー)
42 リングギア(伝達手段)
51 第1ストッパー
52 第2ストッパー
53 回動部(伝達手段)
54 連結部
【技術分野】
【0001】
本発明は無段変速機に関するものである。
【背景技術】
【0002】
従来、固定プーリと、可動プーリとを備え、固定プーリと可動プーリとの間に形成されるV溝の幅を変更し、変速する無段変速機が特許文献1に開示されている。特許文献1に開示された無段変速機では、可動プーリの背面側にバネを設け、バネによる付勢力でVベルトをプーリによって保持している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−168080号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記の発明では、V溝の幅が狭い場合にプーリとVベルトとの間でベルト滑りが発生しないようにバネを設定すると、V溝の幅が広くなる場合にバネによる付勢力が過大となり、ベルト挟持力が過大となり、プーリ、またはVベルトが劣化する、といった問題点がある。
【0005】
本発明はこのような問題点を解決するために発明されたもので、バネによるベルト挟持力が過大となることを防止し、プーリ、またはVベルトが劣化することを抑制することを目的とする。
【課題を解決するための手段】
【0006】
本発明のある態様に係る無段変速機は、固定プーリと、固定プーリが連結された軸部の軸方向に移動する可動プーリと、固定プーリと可動プーリとによって形成されるV溝の溝幅が変更されることで、固定プーリおよび可動プーリとの接触半径が変更されるベルトとを備えた無段変速機であって、可動プーリを固定プーリ側へ付勢する推力を発生する弾性手段と、V溝の溝幅が大きくなるように可動プーリが軸部の軸方向に移動する場合に、弾性手段による推力が増加することを抑制する推力低減機構とを備え、推力低減機構は、可動プーリの背面側の軸部に設けられ、弾性手段の一方の端部が当接する第1ストッパーと、第1ストッパーよりも固定プーリ側であり、可動プーリの背面側に設けられ、弾性手段のもう一方の端部が当接し、弾性手段による推力を可動プーリに伝達する伝達手段とを備え、V溝の溝幅が大きくなるように可動プーリが軸方向に移動する場合に、伝達手段と弾性手段との当接部位は、可動プーリに対して相対的に固定プーリ側へ移動する。
【発明の効果】
【0007】
この態様によると、V溝の溝幅が大きくなるように可動プーリが軸方向に移動した場合に、弾性手段が当接する伝達手段が可動プーリに対して相対的に固定プーリ側へ移動するので、ベルト挟持力が過大となることを防止することができ、ベルト、またはプーリの劣化を抑制することができる。
【図面の簡単な説明】
【0008】
【図1】第1実施形態の無段変速機の概略断面図である。
【図2】図1のII-II断面における概略図である。
【図3】図2のIII-III断面におけるセカンダリプーリの概略構成図である。
【図4】第1実施形態の突出部を示す概略図である。
【図5】第1実施形態の突出部を展開した場合の概略図である。
【図6】突出部の変形例を示す図である。
【図7】突出部の変形例を示す図である。
【図8】突出部の変形例を示す図である。
【図9】突出部の変形例を示す図である。
【図10】第2実施形態のセカンダリプーリの概略断面図である。
【図11】第3実施形態のセカンダリプーリの概略断面図である。
【発明を実施するための形態】
【0009】
本発明の第1実施形態の無段変速機について図1、図2を用いて説明する。図1は本実施形態の無段変速機の概略断面図である。図1のセカンダリプーリは無段変速機の変速比が最Highとなっている状態と、最Lowとなっている状態を示している。図2は図1のII-II断面における概略図である。図2では無段変速機の変速比が最Lowとなっている状態を示している。
【0010】
本実施形態の無段変速機1は、プライマリプーリ2と、セカンダリプーリ3と、ベルト4と、バネ5と、推力低減機構6とを備える。
【0011】
プライマリプーリ2は、固定プーリ2aと、固定プーリ2aに対向配置された可動プーリ2bと、軸部2cとを備える。プライマリプーリ2は、固定プーリ2aのシーブ面と可動プーリ2bのシーブ面とによってV字状のプーリ溝を形成する。可動プーリ2bは、例えば遠心ローラーによって軸部2cに沿って移動し、プーリ溝の溝幅を変更する。
【0012】
セカンダリプーリ3は、固定プーリ3aと、固定プーリ3aに対向配置された可動プーリ3bと、軸部3cとを備える。セカンダリプーリ3は、固定プーリ3aのシーブ面と可動プーリ3bのシーブ面とによってV字状のプーリ溝を形成する。可動プーリ3bは、周方向においては軸部3cと共に回転し、軸方向においては軸部3cに対して移動可能となるように配置されている。
【0013】
可動プーリ3bは、軸部3cに摺接し、固定プーリ3aとは反対側に延設される第1円筒部7aと、可動プーリ3bの径方向外側の外周端から固定プーリ3aとは反対側に延設される第2円筒部7bと、第1円筒部7aの外周壁から径方向外側に突出する保持部7dとを備える。
【0014】
第1円筒部7aには、固定プーリ3aとは反対側の端部から固定プーリ3a側に向けて切欠部7cが形成される。切欠部7cは、可動プーリ3bが軸方向に移動した場合に、第1円筒部7aが後述する突出部10に接触しないように形成される。保持部7dは、図3に示すように後述するキャリア14を軸方向において挟持するように配置され、キャリア14の軸方向への移動を規制する。図3は、図2のIII-III断面におけるセカンダリプーリ3の概略図であり、変速比が最Highとなっている状態と、最Lowとなっている状態とを示している。保持部7dは、キャリア14の周方向への回転は規制しない。
【0015】
可動プーリ3bは、ベルト4によって可動プーリ3bを固定プーリ3aとは反対側に押す力と、バネ5によって固定プーリ3a側に押す力との差によって軸部3cの軸方向に沿って移動し、プーリ溝の溝幅を変更する。
【0016】
セカンダリプーリ3では、可動プーリ3bをバネ5によって固定プーリ3a側へ押す推力によって、ベルト挟持力が発生する。
【0017】
ベルト4はプライマリプーリ2とセカンダリプーリ3との間に掛け回され、プライマリプーリ2とセカンダリプーリ3との間で動力を伝達する。プライマリプーリ2とベルト4との接触半径、およびセカンダリプーリ3とベルト4との接触半径が変更されることで、無段変速機1は、変速比を無段階に変更する。
【0018】
推力低減機構6は、突出部10と、サンギア11と、ピニオンギア12と、リングギア13と、キャリア14と、第3円筒部15と、ストッパー16とを備えた遊星歯車機構である。
【0019】
突出部10は、可動プーリ3bの背面側の軸部3cに設けられ、軸部3cから径方向外側に突出し、軸方向に延設される。突出部10は図4に示すように螺旋状に形成される。突出部10を平面に展開すると、突出部10は図5に示すように軸部3cの軸3dに対して傾斜した直線形状となる。可動プーリ3bの背面とは、固定プーリ3aと向かい合う面の裏側の面をいう。
【0020】
第3円筒部15は、突出部10よりも径方向外側に設けられ、軸方向に延設される。第3円筒部15の固定プーリ3a側の端部は、可動プーリ3bの背面に連結する。第3円筒部15の外周壁にはサンギア11が螺合する第1溝15aが螺旋状に形成される。第1溝15aは、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、サンギア11が周方向に回転しながら固定プーリ3a側へ移動するように形成される。
【0021】
サンギア11は、径方向内側の端部が第3円筒部15の第1溝15aに螺合し、径方向外側に歯車が形成された外歯車である。サンギア11は、第1溝15aに沿って回転可能となっており、ピニオンギア12の歯車と噛み合う。サンギア11は、ピニオンギア12の歯車に噛み合いながら軸方向へ移動可能となる。サンギア11は、バネ5の固定プーリ3a側の端部と当接し、バネ5による弾性力を可動プーリ3bに伝達し、可動プーリ3bを固定プーリ3a側へ付勢する。
【0022】
ピニオンギア12は、径方向内側でサンギア11の歯車に噛み合い、径方向外側でリングギア13の歯車に噛み合う。ピニオンギア12は、キャリア14によって径方向の移動が規制され、キャリア14と共に周方向に公転する。また、ピニオンギア12は、キャリア14の軸部14bを中心に自転する。ピニオンギア12は、ピニオンギア12とサンギア11とが噛み合った状態でサンギア11が軸方向に移動可能となるように軸方向に延設して設けられる。
【0023】
キャリア14は、径方向内側で軸方向に延設する螺合部14aと、ピニオンギア12を軸支する軸部14bとを備える。螺合部14aは、可動プーリ3bの第1円筒部7aと第3円筒部15との間に設けられ、突出部10に螺合する第2溝14cが形成される。第2溝14cは、突出部10の形状に沿って螺旋状に形成される。キャリア14は、保持部7dによって軸方向における移動が規制され、軸方向においては可動プーリ3bと共に移動する。しかし、周方向の回転については保持部7dによって規制されておらず、キャリア14は、可動プーリ3bに対して相対的に回転可能となっている。キャリア14は、可動プーリ3bと共に軸方向へ移動すると、突出部10に沿って周方向に回転する。つまり、キャリア14は、軸方向に移動すると、軸部3c、および可動プーリ3bに対して相対的に周方向に回転する。
【0024】
リングギア13は、可動プーリ3bの第2円筒部7bの内周壁に設けられ、ピニオンギア12に噛み合う内歯車である。リングギア13は、可動プーリ3bと共に回転する。可動プーリ3bが軸方向に移動すると、キャリア14はリングギア13に対しても相対的に周方向に回転する。
【0025】
ストッパー16は、可動プーリ3bの背面側に設けられ、軸部3cから径方向外側に向けて突出する。ストッパー16は、サンギア11に当接する端部とは反対側のバネ5の端部が当接する。
【0026】
バネ5は、一方の端部がサンギア11に当接し、もう一方の端部がストッパー16に当接し、サンギア11を固定プーリ3a側へ付勢する推力を発生させ、固定プーリ3aおよび可動プーリ3bによってベルト4を保持するベルト挟持力を発生させる。バネ5は、変速比が最Lowの場合にベルト滑りが発生しないベルト挟持力を発生するように設定されている。
【0027】
本実施形態の作用について説明する。
【0028】
無段変速機1の変速比がHigh側へ変更される場合には、可動プーリ3bのプーリ溝の幅が広くなるように、可動プーリ3bが軸方向に移動する。可動プーリ3bが軸方向に移動すると、突出部10に沿ってキャリア14は周方向に回転する。キャリア14は可動プーリ3bに対して相対的に周方向へ回転する。リングギア13は、可動プーリ3bに固定されており、キャリア14が周方向へ回転することによって、ピニオンギア12が回転し、サンギア11も回転する。サンギア11の径方向内側の端部は、可動プーリ3bに固定された第3円筒部15の第1溝15aに螺合している。そのため、サンギア11は、第1溝15aに沿って移動し、周方向に回転しながら固定プーリ3a側に移動する。
【0029】
つまり、プーリ溝の幅が広くなるように可動プーリ3bが軸方向に移動すると、サンギア11は軸方向における可動プーリ3bの移動方向とは反対方向に移動する。バネ5の一方の端部はサンギア11と当接しており、バネ5のもう一方の端部はストッパー16に当接している。そのため、プーリ溝の幅が広くなるように軸方向に可動プーリ3bが移動すると、バネ5の長さは長くなり、バネ5による可動プーリ3bの推力が小さくなる。
【0030】
また、遊星歯車機構によってキャリア14を介して入力される回転速度に対して、サンギア11で出力される回転速度は増速され、推力低減機構6は増速機構としての機能を有する。
【0031】
本発明の第1実施形態の効果について説明する。
【0032】
セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、バネ5が可動プーリ3bを固定プーリ3a側へ付勢する推力を低減する推力低減機構6を備える。バネ5の一方の端部はセカンダリプーリ3の軸部3cに設けたストッパー16に当接し、バネ5のもう一方の端部はサンギア11に当接する。セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、サンギア11は、可動プーリ3bに対して相対的に固定プーリ3a側へ移動する。これによって、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、バネ5による可動プーリ3bを固定プーリ3a側へ付勢する推力が増加することを防止することができる。例えば、変速比がLow側となっている場合に必要なベルト挟持力が大きい場合には、必要なベルト挟持力にあわせてバネ5を設定し、変速比がHigh側となった場合にベルト挟持力が過大となることを防止することができる。そのため、変速比がHigh側となった場合に、ベルト、またはセカンダリプーリ3の耐久性が低下することを抑制することができる(請求項1に対応する効果)。
【0033】
本実施形態を用いずにセカンダリプーリのプーリ溝の幅が大きくなるように可動プーリが軸方向に移動する場合に、バネおよびストッパーを可動プーリの移動方向と同じ方向に移動させることで、ベルト挟持力が過大となることを防止することも可能であるが、バネおよびストッパーを移動させるためのスペースが軸方向に必要となり、軸方向の長さが長くなる。本実施形態では、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、サンギア11を可動プーリ3bに対して相対的に固定プーリ3a側へ移動させることで、バネ5およびストッパー16を移動させるために必要なスペースを設ける必要が無く、無段変速機1の軸方向の長さを短くすることができ、無段変速機1を小型化することができる(請求項1に対応する効果)。
【0034】
軸部3cに螺旋状の突出部10を設け、キャリア14の螺合部14aに突出部10と螺合する第2溝14cを形成する。サンギア11はピニオンギア12に対して軸方向に移動可能に噛み合う。これにより、可動プーリ3bが軸方向に移動した場合に、キャリア14、ピニオンギア12が周方向に回転し、サンギア11は第1溝15aに沿って周方向に回転し、かつ軸方向に移動する。このように、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、機械式機構によってサンギア11を可動プーリ3bに対して相対的に固定プーリ3a側へ移動させることできる(請求項2に対応する効果)。
【0035】
キャリア14の周方向への回転を増速してサンギア11に伝達することで、可動プーリ3bの軸方向への移動量に対するサンギア11の軸方向への移動量を大きくすることができ、ベルト挟持力が過大となることをさらに防止することができる(請求項3に対応する効果)。
【0036】
推力低減機構6を遊星歯車機構、特にシングルピニオン遊星歯車機構とし、ピニオンギア12は可動プーリ3bに固定されたリングギア13に噛み合い、サンギア11は可動プーリ3bに固定された第3溝15cに螺合する。これにより、セカンダリプーリのプーリ溝の幅が大きくなるように可動プーリが軸方向に移動する場合に、部品点数が少ない機械式機構によって可動プーリ3bの軸方向への移動に対してサンギア11を相対的に固定プーリ3a側へ移動させることできる(請求項4、5に対応する効果)。
【0037】
突出部10を展開した場合に、突出部10が軸部3cの軸線3dに対して傾斜した直線形状となるように突出部10を設けることで、セカンダリプーリ3のプーリ溝の幅が大きくなるように可動プーリ3bが軸方向に移動する場合に、可動プーリ3bの軸方向への移動量に応じてベルト挟持力を小さくすることができる(請求項6に対応する効果)。
【0038】
本実施形態では、突出部10は図5に示すように展開した場合に図が直線形状となるが、図6、7に示す形状としてもよい。図6は突出部の変形例であり、図7は図6の突出部20の展開図である。突出部20を展開した場合に、突出部20は曲線形状となる。これにより、展開図では突出部が直線形状となる場合と比較して、変速比がLow側の場合にはベルト挟持力の低減量が小さく、変速比がHigh側の場合にはベルト挟持力の低減量が大きくなる。
【0039】
また、突出部のさらなる変形例を図8、9に示す。図8は突出部の変形例であり、図9は図8の突出部21の展開図である。突出部21を展開した場合に、突出部21は傾きが異なる複数の直線形状の突出部を連結した形状となる。これにより、突出部21の形状に応じてベルト挟持力の低減量を調整することができる。
【0040】
次に本発明の第2実施形態の無段変速機について図10を用いて説明する。図10は、本実施形態のセカンダリプーリの概略断面図である。図10では無段変速機の変速比が最Highとなっている状態と、最Lowとなっている状態とを示している。
【0041】
本実施形態は、第1実施形態と比較して主に推力低減機構が異なっている。第2実施形態については第1実施形態と異なる部分を中心に説明する。第1実施形態と同じ構成は、第1実施形態と同じ符号を付し、ここでの説明は省略する。
【0042】
推力低減機構40は、突出部10と、サンギア41と、ピニオンギア12、リングギア42と、キャリア43と、第3円筒部44と、ストッパー16とを備えた遊星機構である。
【0043】
サンギア41は、可動プーリ30に固定された第3円筒部44の外周壁に連結された外歯車である。
【0044】
リングギア42は、ピニオンギア12に噛み合う内歯車であり、リングギア42の外周端部は可動プーリ30の第2円筒部31に設けた第3溝32に螺合する。
【0045】
バネ5は、一方の端部がストッパー16に当接しており、もう一方の端部はリングギア42に当接している。
【0046】
本実施形態の作用について説明する。
【0047】
可動プーリ30が、プーリ溝の幅が広くなるように軸方向に移動すると、突出部10に沿ってキャリア43は周方向に回転する。サンギア41は可動プーリ30に固定されており、キャリア43の周方向への回転によって、ピニオンギア12が回転し、リングギア42も回転する。リングギア42の径方向外側の端部は、可動プーリ30の第2円筒部31に形成された第3溝32に螺合している。そのため、リングギア42は、第3溝32に沿って移動し、周方向に回転しながら固定プーリ3a側に移動する。
【0048】
本実施形態では、プーリ溝の幅が広くなるように可動プーリ30が軸方向に移動すると、リングギア42は軸方向における可動プーリ30の移動方向とは反対方向に移動する。
【0049】
本発明の第2実施形態の効果について説明する。
【0050】
本実施形態では、第1実施形態と比較して、可動プーリ30の軸方向への移動量に対するリングギア42の移動量を小さくすることができ、ベルト挟持力の低減力量を小さくすることができる。つまり、第1実施形態、第2実施形態の構成とすることで、可動プーリ3bの軸方向への移動量に対して、遊星歯車機構の形態、突出部10の形状、ギアの歯数を組み合わせることで、可動プーリ3bの軸方向への移動量に対するベルト挟持力の自由度を増すことができる。
【0051】
本発明の第3実施形態の無段変速機について図11を用いて説明する。図11は本実施形態のセカンダリプーリの概略構成図であり、無段変速機の変速比が最Highとなっている場合と変速比が最Lowとなっている場合を示している。
【0052】
本実施形態の無段変速機は、第3実施形態については第1実施形態と異なる部分を中心に説明する。第1実施形態と同じ構成は、第1実施形態と同じ符号を付し、ここでの説明は省略する。
【0053】
推力低減機構50は、第1ストッパー51と、第2ストッパー52と、回動部53と、連結部54とを備える。
【0054】
第1ストッパー51は、軸部3cから径方向外側に突出する。第1ストッパー51は、バネ55の一方の端部が当接する。
【0055】
第2ストッパー52は、第1ストッパー51よりも可動プーリ60側に位置し、径方向外側に突出する。第2ストッパー52は、回動部53の一部が当接する。第1ストッパー51と第2ストッパー52との間の距離は、可動プーリ60が軸方向に移動しても変わらない。
【0056】
回動部53は、可動プーリ60の第2円筒部61の内周壁に連結部54を介して連結され、連結部54を中心に回動する。回動部53は、径方向内側の端部側で第2ストッパー52およびバネ55に当接する。第2ストッパー52、回動部53、バネ55は固定プーリ3a側から第2ストッパー52、回動部53、バネ55の順番に配置される。つまり、回動部53は、径方向内側の端部付近で固定プーリ3a側の面または端部が第2ストッパー52に当接し、反対側の面がバネ55に当接する。
【0057】
本実施形態の作用について説明する。
【0058】
変速比が最Lowとなっている場合、つまり可動プーリ60のプーリ溝の幅が最小となっている場合には、第1ストッパー51と回動部53とは略並行となっている。変速比がHigh側へ変更され、可動プーリ60のプーリ溝の幅が大きくなるように可動プーリ60が軸方向に移動すると、連結部54は可動プーリ60と共に軸方向に移動する。回動部53は、バネ55によって固定プーリ3a側に向けて付勢されているので、回動部53は連結部54を中心として回動する。回動部53の径方向内側の端部は、第2ストッパー52と当接しており、回動部53の径方向内側の端部が第2ストッパー52よりも固定プーリ3a側へ移動することはない。このように可動プーリ60が軸方向に移動すると、回動部53が回動し、バネ55の収縮を低減することができる。
【0059】
バネ55による付勢力は、回動部53、連結部54を介して可動プーリ60に作用し、この付勢力によって可動プーリ60はベルト4を挟持する。そのため、バネ55によるベルト挟持力は、バネ55と回動部53との当接部が径方向外側、つまり連結部54側となるにつれて大きくなる。バネ55と回動部53との当接位置を変えることで、可動プーリ60の位置が同じでも、バネ55によるベルト挟持力は異なっている。つまり、バネ55と回動部53との当接位置を変えることで、ベルト挟持力を変更することができる。
【0060】
本発明の第3実施形態の効果について説明する。
【0061】
回動部53は、可動プーリ60の連結した連結部54を介して回動可能となっており、径方向内側の端部が軸部3cに設けられた第2ストッパー52に当接する。プーリ溝が大きくなるように可動プーリ60が軸方向に移動する場合に、回動部63は、連結部54を介して回動し、回動部63を介して可動プーリ60を固定プーリ3a側へ付勢するバネ55の収縮を低減することができる。そのため、プーリ溝の幅が大きくなるように可動プーリ60が軸方向に移動する場合に、バネ55による可動プーリ60を固定プーリ3a側へ付勢する推力が増加することを抑制することができる(請求項9に対応する効果)。
【0062】
本発明は上記した実施形態に限定されるものではなく、その技術的思想の範囲内でなしうるさまざまな変更、改良が含まれることは言うまでもない。
【0063】
上記実施形態では、推力低減機構6としてシングルピニオン遊星歯車機構を用いたが、ダブルピニオン遊星歯車機構を用いても良い。ダブルピニオン遊星歯車機構を用いることで、キャリアの回転の増速を大きくすることができる。
【0064】
上記実施形態では、保持部7dは図2における水平方向に2つ設けられているが、保持部7dの個数や配置は上記実施形態に限られることはない。
【符号の説明】
【0065】
1 無段変速機
3a 固定プーリ
3b、30 可動プーリ
3c 軸部
4 ベルト
5、55 バネ(弾性手段)
6、40、50 推力低減機構
10 突出部(第1螺合手段)
11 サンギア(伝達手段)
12 ピニオンギア(第2螺合手段)
13 リングギア
14、43 キャリア(第2螺合手段)
15 第3円筒部(第3螺合手段)
16 ストッパー(第1ストッパー)
42 リングギア(伝達手段)
51 第1ストッパー
52 第2ストッパー
53 回動部(伝達手段)
54 連結部
【特許請求の範囲】
【請求項1】
固定プーリと、前記固定プーリが連結された軸部の軸方向に移動する可動プーリと、前記固定プーリと前記可動プーリとによって形成されるV溝の溝幅が変更されることで、前記固定プーリおよび前記可動プーリとの接触半径が変更されるベルトとを備えた無段変速機であって、
前記可動プーリを前記固定プーリ側へ付勢する推力を発生する弾性手段と、
前記V溝の溝幅が大きくなるように前記可動プーリが前記軸部の軸方向に移動する場合に、前記弾性手段による推力が増加することを抑制する推力低減機構とを備え、
前記推力低減機構は、
前記可動プーリの背面側の前記軸部に設けられ、前記弾性手段の一方の端部が当接する第1ストッパーと、
前記第1ストッパーよりも前記固定プーリ側であり、前記可動プーリの背面側に設けられ、前記弾性手段のもう一方の端部が当接し、前記弾性手段による推力を前記可動プーリに伝達する伝達手段とを備え、
前記V溝の溝幅が大きくなるように前記可動プーリが前記軸方向に移動する場合に、前記伝達手段と前記弾性手段との当接部位は、前記可動プーリに対して相対的に前記固定プーリ側へ移動することを特徴とする無段変速機。
【請求項2】
前記推力低減機構は、
前記可動プーリの背面側の前記軸部に形成された螺旋形状の第1螺合手段と、
前記第1螺合手段に螺合し、前記伝達手段を前記軸部の周方向に回転させる第2螺合手段とを備え、
前記伝達手段は、前記V溝の溝幅が大きくなるように前記可動プーリが前記軸部の軸方向に移動する場合に、前記第2螺合手段によって前記周方向へ回転しながら、前記可動プーリに対して相対的に前記固定プーリ側へ移動することを特徴とする請求項1に記載の無段変速機。
【請求項3】
前記推力低減機構は、前記第1螺合手段による回転を増速させて前記伝達手段に伝達する増速機構であることを特徴とする請求項2に記載の無段変速機。
【請求項4】
前記増速機構は、遊星歯車機構であることを特徴とする請求項3に記載の無段変速機。
【請求項5】
前記増速機構は、シングルピニオン遊星歯車機構であり、
前記第2螺合手段は、キャリアとピニオンギアによって構成され、
前記伝達手段は、前記ピニオンギアと噛み合うサンギアであり、
前記シングルピニオン遊星歯車機構は、
前記ピニオンギアと噛み合い、前記可動プーリに固定されるリングギアと、
前記サンギアの前記径方向内側の端部と螺合し、前記可動プーリに固定された螺旋形状の第3螺合手段とを備え、
前記キャリア、および前記ピニオンギアは前記第1螺合手段の螺旋形状に沿って移動し、
前記サンギアは、前記第3螺合手段の螺旋形状に沿って移動することを特徴とする請求項4に記載の無段変速機。
【請求項6】
前記第1螺合手段は、平面に展開した場合に前記軸部の軸線に対して傾斜した直線形状となることを特徴とする請求項2から5のいずれか一つに記載の無段変速機。
【請求項7】
前記第1螺合手段は、平面に展開した場合に曲線形状となることを特徴とする請求項2から5のいずれか一つに記載の無段変速機。
【請求項8】
前記第1螺合手段は、平面に展開した場合に前記軸部の軸線に対して傾斜し、傾きが異なる複数の直線形状を連結した形状となることを特徴とする請求項2から5のいずれか一つに記載の無段変速機。
【請求項9】
前記推力低減機構は、
前記可動プーリの背面側の前記軸部に設けられ、前記第1ストッパーよりも前記固定プーリ側に設けられた第2ストッパーと、
前記伝達手段の一方の端部を前記可動プーリに回動可能に連結する連結手段とを備え、
前記伝達手段のもう一方の端部は、前記第2ストッパーと当接することを特徴とする請求項1に記載の無段変速機。
【請求項1】
固定プーリと、前記固定プーリが連結された軸部の軸方向に移動する可動プーリと、前記固定プーリと前記可動プーリとによって形成されるV溝の溝幅が変更されることで、前記固定プーリおよび前記可動プーリとの接触半径が変更されるベルトとを備えた無段変速機であって、
前記可動プーリを前記固定プーリ側へ付勢する推力を発生する弾性手段と、
前記V溝の溝幅が大きくなるように前記可動プーリが前記軸部の軸方向に移動する場合に、前記弾性手段による推力が増加することを抑制する推力低減機構とを備え、
前記推力低減機構は、
前記可動プーリの背面側の前記軸部に設けられ、前記弾性手段の一方の端部が当接する第1ストッパーと、
前記第1ストッパーよりも前記固定プーリ側であり、前記可動プーリの背面側に設けられ、前記弾性手段のもう一方の端部が当接し、前記弾性手段による推力を前記可動プーリに伝達する伝達手段とを備え、
前記V溝の溝幅が大きくなるように前記可動プーリが前記軸方向に移動する場合に、前記伝達手段と前記弾性手段との当接部位は、前記可動プーリに対して相対的に前記固定プーリ側へ移動することを特徴とする無段変速機。
【請求項2】
前記推力低減機構は、
前記可動プーリの背面側の前記軸部に形成された螺旋形状の第1螺合手段と、
前記第1螺合手段に螺合し、前記伝達手段を前記軸部の周方向に回転させる第2螺合手段とを備え、
前記伝達手段は、前記V溝の溝幅が大きくなるように前記可動プーリが前記軸部の軸方向に移動する場合に、前記第2螺合手段によって前記周方向へ回転しながら、前記可動プーリに対して相対的に前記固定プーリ側へ移動することを特徴とする請求項1に記載の無段変速機。
【請求項3】
前記推力低減機構は、前記第1螺合手段による回転を増速させて前記伝達手段に伝達する増速機構であることを特徴とする請求項2に記載の無段変速機。
【請求項4】
前記増速機構は、遊星歯車機構であることを特徴とする請求項3に記載の無段変速機。
【請求項5】
前記増速機構は、シングルピニオン遊星歯車機構であり、
前記第2螺合手段は、キャリアとピニオンギアによって構成され、
前記伝達手段は、前記ピニオンギアと噛み合うサンギアであり、
前記シングルピニオン遊星歯車機構は、
前記ピニオンギアと噛み合い、前記可動プーリに固定されるリングギアと、
前記サンギアの前記径方向内側の端部と螺合し、前記可動プーリに固定された螺旋形状の第3螺合手段とを備え、
前記キャリア、および前記ピニオンギアは前記第1螺合手段の螺旋形状に沿って移動し、
前記サンギアは、前記第3螺合手段の螺旋形状に沿って移動することを特徴とする請求項4に記載の無段変速機。
【請求項6】
前記第1螺合手段は、平面に展開した場合に前記軸部の軸線に対して傾斜した直線形状となることを特徴とする請求項2から5のいずれか一つに記載の無段変速機。
【請求項7】
前記第1螺合手段は、平面に展開した場合に曲線形状となることを特徴とする請求項2から5のいずれか一つに記載の無段変速機。
【請求項8】
前記第1螺合手段は、平面に展開した場合に前記軸部の軸線に対して傾斜し、傾きが異なる複数の直線形状を連結した形状となることを特徴とする請求項2から5のいずれか一つに記載の無段変速機。
【請求項9】
前記推力低減機構は、
前記可動プーリの背面側の前記軸部に設けられ、前記第1ストッパーよりも前記固定プーリ側に設けられた第2ストッパーと、
前記伝達手段の一方の端部を前記可動プーリに回動可能に連結する連結手段とを備え、
前記伝達手段のもう一方の端部は、前記第2ストッパーと当接することを特徴とする請求項1に記載の無段変速機。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−96494(P2013−96494A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239452(P2011−239452)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
[ Back to top ]