
無線タグリーダおよび監視システム
【課題】無線タグの方向探知精度がよい無線タグリーダを提供する。
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
【解決手段】無線タグ400の各タグアンテナ412、414、416からの電波から電力強度パターンと参照パターンとの相関誤差をそれぞれ算出する(S108)。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線タグの方向を推定できる無線タグリーダ、およびこの無線タグリーダを用いる監視システムに関するものである。
【背景技術】
【0002】
電波を利用して無線タグから情報を読み取る無線タグシステムは様々な用途で使用されつつあり、このシステムの主要素である無線タグリーダは広範な用途に適用し得るように高機能化が求められている。高機能化の例としては、例えば、無線タグの情報を単純に読み取るだけではなく、その無線タグがどの方向に存在し得るかを特定可能とし、無線タグ所持者の探索に利用したり、無線タグ所持者が適正な方向に存在するか否かの判断に利用したりすることが考えられつつある。
【0003】
無線タグの方向の特定に関連する技術としては、例えば特許文献1のようなものが提案されている。この特許文献1では、複数のアンテナ素子を備えて指向特性を変化させることができるアレーアンテナを用いた電波到来方向探知方法が開示されており、該電波到来方向探知方法では、全方向角360度を12分割したビーム切り替えにより電波の到来方向を推定している。
【0004】
また、特許文献2には、半移動、移動局のアンテナ制御の為のシステムとして、ジャイロコンパスや加速度センサ等を用いて移動体の位置、姿勢、及び方位を検出し、これらをもとにアンテナの姿勢を制御する技術が知られていることが開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3836080号公報
【特許文献2】特許第3002612号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1のアレーアンテナは、水平面走査となるように設置されるのが通常であり、この場合、垂直偏波(直線偏波)に対して良好な感度を有する。したがって、方向探知の対象となる電波が垂直偏波の場合に、精度のよい方向探知を行うことが可能となる。
【0007】
しかし、無線タグが人に携帯される場合は、無線タグは様々な向きとなる。したがって、無線タグからのアンテナが一本であると、無線タグからの電波が水平偏波となることもある。しかし、特許文献1のアレーアンテナは、水平偏波に対しては感度が低く、また、指向性が鋭くないことから、無線タグからの電波が水平偏波である場合には方向探知精度が低下してしまうという問題がある。
【0008】
そこで、無線タグに送信アンテナを複数備え、各送信アンテナからそれぞれ電波を送信するとともに、無線タグリーダは、各送信アンテナで送信された電波から、垂直偏波を送信しているアンテナを選択する(すなわち、垂直偏波となっている電波を選択する)アンテナ選択ダイバーシティを行うことが考えられる。
【0009】
前述のように、特許文献1のアレーアンテナは、垂直偏波に対して良好な感度を有する。そこで、上記アンテナ選択ダイバーシティとしては、送信アンテナを切り替えながら無線タグが送信した電波を、アレーアンテナを搭載した無線タグリーダで受信し、無線タグの複数の送信アンテナのうち、最も強い電力強度が得られた送信アンテナを垂直偏波を送信しているアンテナとして特定することが考えられる。
【0010】
しかしながら、電力強度が最も強い場合が偏波一致とならないケースが存在する。例えば、無線タグが後ポケットに入れられている場合には、人体影響により、人体の前方へは垂直偏波が劣化し、相対的に水平偏波が強調される。このような場合には、水平偏波であっても、垂直偏波よりも電力強度が強くなる場合があることから、水平偏波を選択してしまう可能性がある。水平偏波を選択してしまった場合には、前述のように、方向探知精度が低下してしまう。
【0011】
また、特許文献2に記載の技術、すなわち、ジャイロコンパスや加速度センサ等のセンサを用いて移動体の姿勢を検出し、これをもとにアンテナの姿勢を制御する技術は、センサや姿勢を制御する装置が必要であることから、装置全体が高価になってしまうので、無線タグに適用することは現実的ではない。
【0012】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、無線タグの方向探知精度がよい無線タグリーダ、および、この無線タグリーダを用いる監視システムを提供することにある。
【課題を解決するための手段】
【0013】
その目的を達成するための請求項1記載の発明は、
垂直偏波に対する水平面内の指向性を複数の設定角度に切り替え可能に構成されたアレーアンテナと、
前記アレーアンテナの指向性を複数の設定角度に順次切り替える指向性切替手段とを備え、
偏波面が互いに直交する方向となっている複数のタグアンテナからそれぞれ電波を送信する無線タグからの電波を、前記指向性切替手段により指向性を切り替えつつ前記アレーアンテナで受信して、受信した電波の到来方位を推定する無線タグリーダであって、
前記アレーアンテナによって受信した電力強度を測定する受信強度測定手段と、
前記指向性切替手段が前記アレーアンテナの指向性を順次切り替えつつ前記受信強度測定手段によって測定された電力強度から、各タグアンテナから受信した前記設定角度の1周期分の電力強度であるタグアンテナ毎の電力強度パターンを決定する電力強度パターン決定手段と、
前記アレーアンテナが垂直偏波を受信した場合の基準の電力強度パターンである参照パターンを記憶する参照パターン記憶手段と、
前記電力強度パターン決定手段が決定した電力強度パターンと前記参照パターンとの相関を表すパターン相関値をタグアンテナ毎に算出する相関値算出手段と、
到来方位の推定に用いる電波として、前記複数のタグアンテナからそれぞれ受信した電波のうち、前記相関値算出手段が算出したタグアンテナ毎のパターン相関値のうち最も相関性が高い値を示した電波を選択する選択手段とを備えることを特徴とする。
【0014】
このように、本発明では、受信電力強度を単純に用いてタグアンテナを選択するのではなく、連続的に取得する電波強度を、例えばタグからリーダへのデータフレームの受信成立に伴う割込みタイミングとデータフレーム内にあるアンテナ番号情報により、タグアンテナ毎に電力強度パターンを決定し、その電力強度パターンと参照パターンとの相関を表すパターン相関値を算出している。
【0015】
前述のように、人体影響等により水平偏波が相対的に強まったとしても、アレーアンテナが切り替える指向性は垂直偏波の指向性であることから、水平偏波が主となるタグアンテナが送信する際に、受信した電波に基づいて決定された電力強度パターンは、指向性の切り替えを反映したパターンとはならない。一方、参照パターンは、アレーアンテナが垂直偏波に対する指向性を順次切り替えたときに垂直偏波を受信した場合の基準となる電力強度パターンである。よって、パターン相関値は、受信した電波が水平偏波である場合には、参照パターンとの相関性が低いことを示す値となる。したがって、タグアンテナ毎のパターン相関値のうち最も相関性が高い値を示した電波を到来方位の推定に用いる電波として選択するようにすれば、水平偏波の電波を選択してしまうことが抑制される。すなわち、垂直偏波を選択できる可能性が向上する。よって、無線タグの方向探知精度が向上する。
【0016】
請求項2記載の発明は、この無線タグリーダが設置されている周囲環境に基づいて設定角度毎に定まる重みであって、電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する重み設定手段と、
その重み設定手段で設定された重みを用いて、前記電力強度パターン決定手段が決定した各タグアンテナの電力強度パターンにおける電力強度を補正するパターン補正手段とを備え、
前記相関値決定手段は、前記パターン補正手段により補正された後の電力強度パターンと前記参照パターンとを用いて前記パターン相関値を算出することを特徴とする。
【0017】
無線タグリーダの周囲に電波反射物が存在する角度については、その電波反射物からの反射により、受信電力強度が大きくなってしまう可能性がある。しかし、本発明では、反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する。そして、この重みにより、タグアンテナの電力強度パターンにおける電力強度を補正する。したがって、重みによる補正後の電力強度パターンは、電波反射物からの反射の影響が軽減されたパターンとなる。そして、パターン相関値は、重みによる補正後の電力強度パターンを用いて算出する。よって、このパターン相関値も、電波反射物からの反射の影響が軽減された値となり、その結果、偏波の違いをよく反映した値となる。よって、水平偏波の電波を選択してしまうことをより抑制できる。
【0018】
請求項3記載の発明は、前記相関値決定手段は、前記電力強度パターン決定手段が決定した電力強度パターンと前記参照パターンとを用いて前記パターン相関値を算出し、
この無線タグリーダが設置されている周囲環境に基づいて設定角度毎に定まる重みであって、電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する重み設定手段と、
その重み設定手段で設定された重みを用いて、前記相関値決定手段が決定した各タグアンテナのパターン相関値を補正する相関値補正手段を備え、
前記選択手段は、前記相関値補正手段により補正された後の各タグアンテナのパターン相関値に基づいて、到来方位の推定に用いる電波を選択することを特徴とする。
【0019】
前述のように、無線タグリーダの周囲に電波反射物が存在する角度については、その電波反射物からの反射により、受信電力強度が大きくなってしまう可能性がある。しかし、本発明では、反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する。そして、この重みにより、パターン相関値を補正する。したがって、重みによる補正後のパターン相関値は、電波反射物からの反射の影響が軽減された値となり、結果として、偏波の違いをよく反映した値となる。よって、水平偏波の電波を選択してしまうことをより抑制できる。
【0020】
請求項4記載の発明は、前記重み設定手段で設定される重みは、前記アレーアンテナと前記電波反射物との間の距離、および、その電波反射物の電波反射率の少なくとも一方に相関した値となっていることを特徴とする。
【0021】
アレーアンテナと電波反射物との間の距離により、電波反射物からの反射の大きさは変化する。また、電波反射物の電波反射率によっても、その電波反射物からの反射の大きさは変化する。よって、この請求項4のようにすれば、電波反射物からの反射が大きいほど小さくなる重みを設定することができる。
【0022】
請求項5記載の発明は、前記重み設定手段で設定される重みは、前記アレーアンテナと前記電波反射物との間の距離に相関した値であって、その距離が短いほど小さい値に設定されることを特徴とする。
【0023】
このように電波反射物までの距離が短いほど小さい重みに設定すれば、電波反射物が存在することによって強くなってしまっている電力強度を、電波反射物の影響を少なくした強度にすることができる。
【0024】
請求項6記載の発明は、監視領域内の物体の距離と方向とを逐次測定するレーザセンサと、その監視領域を通信範囲として含んでいる請求項5に記載の無線タグリーダと、を備えた監視システムであって、
前記無線タグリーダは、
前記レーザセンサで検出された物体の距離と方向とを逐次取得できるようになっており、
前記重み設定手段で設定される重みは、前記レーザセンサから逐次取得した物体の方向に基づいて定まる設定角度に対して、前記レーザセンサから逐次取得した物体の距離に応じた値となっていることを特徴とする。
【0025】
このようにすれば、レーザセンサにより逐次測定された物体の距離と方向とに基づいて重みが設定されることから、移動物体が存在する場合にも、その移動物体の存在を反映した重みを設定することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の第1実施形態に係る監視システムの模式図である。
【図2】第1実施形態においてコントローラ300が行う処理を示すフローチャートである。
【図3】監視システムで用いられる無線タグリーダライタ100の構成図である。
【図4】無線タグリーダライタ100の送信部4および受信部5の詳細構成を示すブロック図である。
【図5】無線タグ400の構成図である。
【図6】無線タグ400における3つのタグアンテナ412、414、416の配置を概念的に示す図である。
【図7】方向探知部7の構成を詳しく示す図である。
【図8】参照パターンの一例を示す図である。
【図9】指向角を順次変化させることで順次形成される無線タグリーダライタ100の指向性パターンの概略図である。
【図10】指向角を変化させつつ検出した受信電力強度により生成される電力強度パターンの一例を示す図である。
【図11】無線タグリーダライタ100が住宅に隣接して設置されている場合の電波の反射を説明する図である。
【図12】図11の配置環境における重み係数リストの一例である。
【図13】方向探知部7が行なう方向探知処理を示すフローチャートである。
【図14】方向探知部7が行なう方向探知処理を示すフローチャートであって、図13に続いて実行する部分である。
【図15】第1実施形態の監視システムで用いられるデータフレームである。
【図16】図14のステップS100における相関誤差の計算処理の詳細フローチャートである。
【図17】人体による電波遮蔽がない状態で、第1タグアンテナ、第2タグアンテナ、第3タグアンテナが送信し、無線タグリーダライタ100が受信した電波の電力検出値を例示する図である。
【図18】人体による電波遮蔽がある状態で、第1タグアンテナ、第2タグアンテナ、第3タグアンテナが送信し、無線タグリーダライタ100が受信した電波の電力検出値を例示する図である。
【図19】人体遮蔽がある状態で各タグアンテナ412、414、416が送信した電波を、無線タグリーダライタ100が受信したときの利得を例示する図である。
【図20】無線タグリーダライタ100のアンテナ部1の指向性を例示する図 である。
【図21】第2実施形態の無線タグリーダライタ100が侵入者の無線タグ400の方向を検出する場合の説明図である。
【図22】第2実施形態での重み係数リストである。
【図23】第3実施形態の無線タグリーダライタ100が侵入者の無線タグ400の方向を検出する場合の説明図である。
【図24】第3実施形態に係るコントローラ300が重み係数W(θ)を自動設定する処理を示すフローチャートである。
【図25】第3実施形態での重み係数リストである。
【図26】第4実施形態において実行する相関誤差の計算処理の詳細フローチャートの一部である。
【発明を実施するための形態】
【0027】
[第1実施形態]
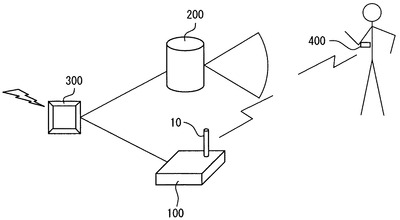
図1は、本発明の第1実施形態に係る監視システムの模式図である。この監視システムは、無線タグ400の方向(到来方位)を推定できる無線タグリーダライタ100と、監視領域内の物体の距離と方向とを測定するレーザセンサ200とを併用し、監視領域内に侵入した人が無線タグ400を携帯しているか否かをコントローラ300が判別し、携帯していない場合に警告を行う。
【0028】
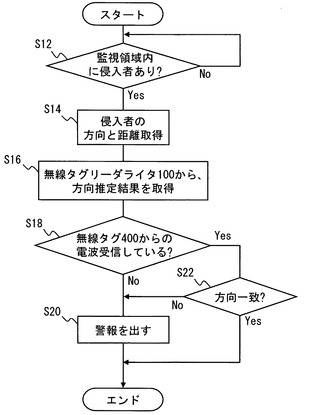
当該監視システムでのコントローラ300の処理について、図2のフローチャートを参照して概略を説明する。先ず、レーザセンサ200を制御して、監視領域内に侵入者があるか否かを判断する(S12)。この判断が否定判断であればS12を繰り返す。
【0029】
一方、肯定判断であれば、ステップS14へ進み、侵入者の方向と距離を取得する。侵入者の方向はレーザセンサ200の走査方向から取得し、侵入者までの距離はレーザセンサ200がレーザ光を送出してから、このレーザ光の反射光を受光するまでの時間から計測する。
【0030】
続いて、無線タグリーダライタ100から、無線タグ400の方向推定の結果を取得する(S16)。なお、無線タグリーダライタ100が行なう方向推定処理については後述する。続くステップS18では、無線タグリーダライタ100が無線タグ400からの電波を受信できているか否かを判断する。無線タグリーダライタ100の方向推定処理結果には、無線タグ400からの電波を受信できているか否かを示す情報も含まれており、ステップS18の判断はその方向推定処理結果を用いて行なう。
【0031】
無線タグリーダライタ100が無線タグ400からの電波を受信できていない場合には(S18:No)、侵入者が無線タグ400を携帯していないと判断し、警報音等により警報を出す(S20)。一方、無線タグリーダライタ100が無線タグ400からの電波を受信していた場合は(S18:Yes)、更に、レーザセンサ200により検出した侵入者の方向と、無線タグリーダライタ100で推定した無線タグ400の方向とが一致するか否か判断する(S22)。レーザセンサ200により検出した侵入者の方向と、無線タグリーダライタ100で推定した無線タグ400の方向が一致しない場合には(S22:No)、侵入者が無線タグ400を携帯しておらず、監視領域内のいずれかに侵入者と無関係な無線タグ400が存在していると判断し、警報を出す(S20)。方向が一致する場合には(S22:Yes)、侵入した者は無線タグ400を携帯する侵入許可者であるとして、警報を出すことなく処理を終了する。
【0032】
次に、監視システムで用いられる無線タグリーダライタ100の構成について、図3を参照して説明する。無線タグリーダライタ100は、アンテナ部1、分配器3、送信部4、受信部5、電力検出回路6、方向探知部7、通信制御部8を備える。
【0033】
アンテナ部1は、電子制御導波器アレーアンテナ装置であり、1本の励振素子10と、その励振素子10を中心とする半径rの円周上に等間隔に設けられた6本の非励振素子11〜16とを備えている。これらはいずれも直棒形状であり、その長さは、たとえば、いずれも約λ/4となっており、上記半径rもλ/4に設定されている。
【0034】
これら励振素子10、非励振素子11〜16は、接地導体17の上に、その接地導体17から絶縁された状態に設けられており、それらの素子は軸方向が鉛直方向となるように配置されている。その接地導体17は、励振素子10や非励振素子11〜16に対して十分に大きい広さ(たとえば半径λ/2)を有している。
【0035】
励振素子10の給電点は、同軸ケーブル19を介して分配器3に接続されており、無線タグ400から送信され励振素子10によって受信された電波を示す受信信号は分配器3に供給される。
【0036】
非励振素子11〜16には、可変リアクタンス回路18A〜18Fがそれぞれ接続されている。この可変リアクタンス回路18は、電子制御導波器アレーアンテナ装置において一般的に用いられるものと同一の回路であり、たとえば、バイアス電圧が印加されることによってリアクタンス値が変化する可変リアクタンス素子(例えば可変容量ダイオード)を含む回路として構成される。この回路は、高周波的に接地導体17に接続され、方向探知コンピュータ6の後述する可変リアクタンス制御部72によってリアクタンス値が電子的に変化させられる。このリアクタンス値が変化させられることにより、アンテナ部1は方位角が変化する。
【0037】
分配器3は、励振素子10から供給される受信信号を受信部5と電力検出回路6に分配する。送信部4は、通信制御部8から供給されるデータを符号化、変調等してアンテナ部1へ出力する。受信部5は、分配器3から供給された受信信号を復調、復号して、通信制御部8へ供給する。
【0038】
電力検出回路6は、分配器3から供給された受信信号の電力の大きさ(電力値)を検出する回路である。この電力検出回路6は、無線信号の電力を検出する種々の公知の回路を用いることができ、たとえばダイオード検波器を含む回路構成のものである。この電力検出回路6で検出された電力値を示す電力値信号は図示しないAD変換回路を介して方向探知部7に供給される。
【0039】
方向探知部7は、可変リアクタンス回路18を制御しつつ、電力検出回路6から供給される電力値信号に基づいて、無線タグ400の方向探知を行なう。この方向探知部7の構成および作動については後に詳述する。
【0040】
通信制御部8は、送信部4および受信部5を制御するものであり、送信部4からデータを送信させ、且つ、受信部5が受信した無線タグ400からのデータを取得する。図4は、送信部4および受信部5の詳細構成を示すブロック図である。図4に示すように、送信部4は、符号部41、変調部42、増幅部43を備える。
【0041】
符号部41は、通信制御部8から供給された信号を符号化する。変調部42は、符号部41にて符号化された信号を電気的デジタル信号に変換した後に、予め設定されている通信チャンネルを用いて位相偏移変調や周波数偏移変調等の所定の変調方式により変調する。増幅部43は、変調部42で変調された信号を増幅する。増幅された信号は、アンテナ部1から電波として送信される。
【0042】
受信部5は、復調部51、復号部52、キャリアセンス部53を備える。キャリアセンス部53は、送信する前に通信チャンネルにて受信電力レベルを検知し、その受信電力レベルが閾値以上ある場合はそのチャンネルでの送信を見合わせ、再度キャリアセンスする。閾値以下であれば、送信可能と判定し送信を開始する。なお、本実施形態の無線タグリーダライタ100は、2.45GHz、900MHz、433MHz等のRFIDにおいて通常用いられる周波数帯の電波を用いて通信を行う。復調部51は受信信号を復調する。復調された信号は復号部52において符号化され、符号化された信号が通信制御部8に送られる。
【0043】
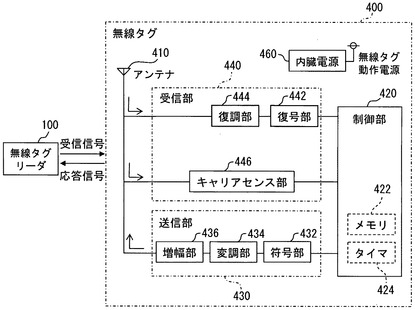
次に、無線タグ400の構成を説明する。図5は、無線タグ400の構成を示す図である。この図5に示すように、無線タグ400は、アンテナ部410、制御部420、送信部430、受信部440を備える。また、この無線タグ400は、アクティブタグであり、内蔵電源460も備える。また、制御部420は、メモリ422、タイマ424を内蔵する。送信部430は、符号を生成する符号部432、符号を変調する変調部434、変調された信号を増幅する増幅部436から成る。受信部440は、受信信号を復調する復調部444、復調された受信信号から符号を復号する復号部442、無線タグリーダライタとの送受信開始の時に通信の設定を行うキャリアセンス部446から成る。
【0044】
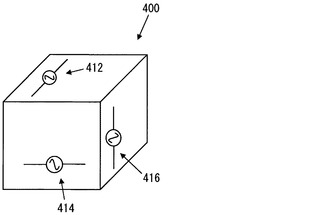
アンテナ部410は、偏波面が互いに直交する3つの第1〜第3タグアンテナ412、414、416を備える。図6は、無線タグ400における、それら3つのタグアンテナ412、414、416の配置を概念的に説明する図である。この図6に示すように、3つのタグアンテナ412、414、416は、本実施形態では、いずれも同じ線状アンテナであり、他の2つのタグアンテナに対して直交するように配置されている。
【0045】
図5に戻り、無線タグ400の制御部420は、タイマ424により周期的に起動し、あるいは、振動センサが無線タグ400に備えられている場合には、振動センサにより振動が検知された後に周期的に起動し、無線タグリーダライタ100からのデータを受信できるかどうかの判定処理を行なう。そして、受信できた場合には、応答信号を無線タグリーダライタ100に送信する。そして、無線タグリーダライタ100との通信が確立した後、無線タグリーダライタ100からの指示に従い、第1、第2、第3タグアンテナ412、414、416を用いて、順番に、無線タグリーダライタ100にデータを送信する。無線タグリーダライタ100は、無線タグ400が送信するこのデータを用いて無線タグ400の方向探知を行なう。
【0046】
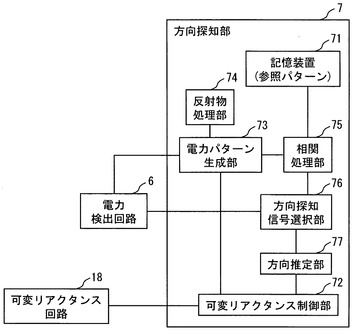
次に、無線タグリーダライタ100の方向探知部7の構成を説明する。図7は、方向探知部7の構成を詳しく説明する図である。方向探知部7は、CPU、ROM、RAM等(いずれも図示せず)を備えており、CPUがRAMの一時記憶機能を利用しつつROMに記憶されているプログラムを実行することにより、図7に示す各部72〜77として機能する。
【0047】
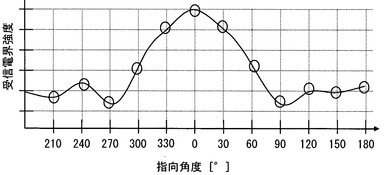
記憶装置71は、不揮発性の記憶装置であり、参照パターンが記憶されている。参照パターンとは、後述する電力強度パターンとの相関を算出する参照用の電力強度パターンである。この参照パターンの一例を図8に示す。参照パターンは、理想的な環境(人体やその他の物体などの遮蔽物がない環境)において、垂直偏波を受信したときの電力強度パターンであり、図8の例では、アンテナ部1がとり得る指向角度のうちの5つの連続する指向角度α(α=−60度、−30度、0度、30度、60度)における受信電界強度からなる。また、記憶装置71には、後述する重み係数W(θ)も記憶されている。
【0048】
可変リアクタンス制御部72は、図示しないメモリに記憶されたデジタル電圧値を参照して、内蔵した6個のDA変換器(図示せず)を用いてそのデジタル電圧値をアナログのバイアス電圧値に変換し、このバイアス電圧値をリアクタンス値信号C11(θ)〜C16(θ)として各可変リアクタンス回路18A〜18Fに出力する。上記デジタル電圧値は、予め設定された複数の指向角(本実施形態では、0°から330°まで30°毎)にビームを形成する複数の指向性ビームパターンに対して記憶されている。可変リアクタンス制御部72は、特許請求の範囲の指向性切替手段として機能し、リアクタンス値信号C11(θ)〜C16(θ)を切り替えることにより、指向性ビームパターンを、0°から330°まで、指向角を30°ずつ順次変化させる。図9は、このようにして、指向角を順次変化させることで順次形成される指向性パターンを概略的に示す図である。
【0049】
なお、メモリに記憶されたデジタル電圧値は、実験に基づいて予め求められた値である。たとえば、可変リアクタンス回路18Aの可変容量ダイオードの容量値を少なくすることで、キャパシタ性を持ち可変リアクタンス回路18Aは短縮コンデンサとなり、非励振素子11の電気長が励振素子10よりも短くなって、導波器として働く。一方、可変リアクタンス回18B〜18Fの可変容量ダイオードの容量値を大きくすることで、可変リアクタンス回路18B〜18Fはインダクタンス性を持ち、可変リアクタンス回路18B〜18Fは延長コイルとなり、非励振素子12〜16の電気長が励振素子10よりも長くなり、反射器として働く。こうすることで、可変リアクタンス制御部72は、アンテナ部1の指向角が0度方向である、励振素子11の方向になるように調整できる。
【0050】
電力パターン生成部73は、可変リアクタンス制御部72がアンテナ部1の指向角を、1周期分、すなわち、0°から330°まで変化させる際に、各指向角において電力検出回路6から供給された電力値を用いて電力強度パターンを生成する。この電力強度パターンは、0°〜330°までの指向角とそれら指向角における電力強度とのセットである。また、前述のように、無線タグ400には、3つのタグアンテナ412、414、416が備えられており、無線タグ400は、これら3つのタグアンテナ412、414、416からそれぞれ同じ強度の信号を送信する。電力パターン生成部73は、各タグアンテナ412、414、416から送信される信号に対して、それぞれ、電力強度パターンを生成する。図10に、このようにして生成した電力強度パターンの一例を示す。
【0051】
反射物処理部74は、特許請求の範囲のパターン補正手段に相当しており、電力パターン生成部73が生成したタグアンテナ毎の電力強度パターンを、無線タグリーダライタ100の周囲における電波反射物の存在状況に応じて補正する処理を行なう。この補正処理は、具体的には、無線タグリーダライタ100の周囲における電波反射物の距離や材質に応じて定まる指向角毎の重み係数W(θ)を、電力強度パターンの各指向角θにおける電力強度に乗じる処理である。反射物処理部74における具体的な重み係数は後述する。
【0052】
相関処理部75は、反射物処理部74により処理された後の電力強度パターンと、記憶装置71に記憶されている参照パターンとの相関性を示す値として相関誤差Γを算出する。この相関誤差Γは、3つのタグアンテナ412、414、416の電力強度パターンに対してそれぞれ算出する。なお、相関誤差Γの算出方法の詳細は後述する。
【0053】
方向探知信号選択部76は、相関処理部75において3つのタグアンテナ412、414、416に対してそれぞれ算出した相関誤差Γのうちの最小値を決定し、その最小値に対応する電力強度パターンの信号を、方向探知に用いる信号として選択する。
【0054】
方向推定部77は、方向探知信号選択部76で選択した電力強度パターンを用いて、無線タグ400の方向推定を行なう。本実施形態では、この方向推定に最大電力法を用いる。すなわち、選択した電力強度パターンにおいて信号強度が最大となる方向を無線タグ400の方向として推定する。
【0055】
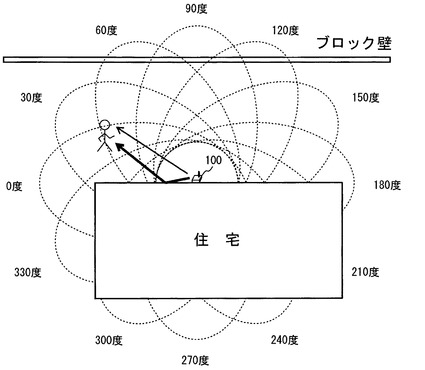
次に、反射物処理部74における処理を詳しく説明する。前述したように、反射物処理部74は、無線タグリーダライタ100の周囲における電波反射物の距離や材質に応じて定まる指向角毎の重み係数を、電力強度パターンの各指向角における電力強度に乗じる。たとえば、図11に示すように、無線タグリーダライタ100が、住宅に隣接して設置されている場合を例に上記重み係数を説明する。
【0056】
図11に示す例では、無線タグリーダライタ100の背面側に、電波反射物である住宅が存在している。この場合、同図に示すように、30度方向に侵入者(無線タグ400)があったとしても、その30度方向に指向角を設定した場合のみならず、他の角度(たとえば、330度)に指向角を設定した場合にも、受信電力強度が強くなる可能性がある。そこで、電波反射物が存在する方向に対しては、その電波反射物からの電波反射の影響を低減させるため、電波反射物からの電波反射が大きいほど小さくなる重み係数を設定する。
【0057】
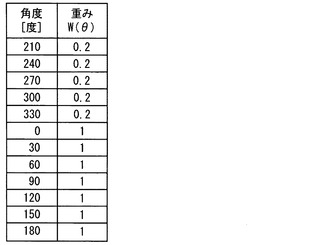
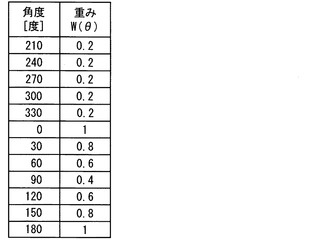
図12は、図11の配置環境における重み係数リストの一例であり、反射障害物が無い方向は重み係数W(θ)を1とする一方、反射障害物がある方向(この例では、210度〜330度)の重み係数W(θ)を1よりも小さくする。ここでは、住宅は反射の大きい物体であるため、0.2を設定している。反射物が大きなビルである場合には、さらに小さな係数、たとえば、0.15を設定する。この重み係数W(θ)は、たとえば、無線タグリーダライタ100の設置時に手動操作で設定する。
【0058】
次に、方向探知部7が行なう方向探知処理を図13に示すフローチャートに沿って説明する。また、このフローチャートの説明において、電力パターン生成部73、相関処理部75、方向探知信号選択部76、方向推定部77の処理も説明する。
【0059】
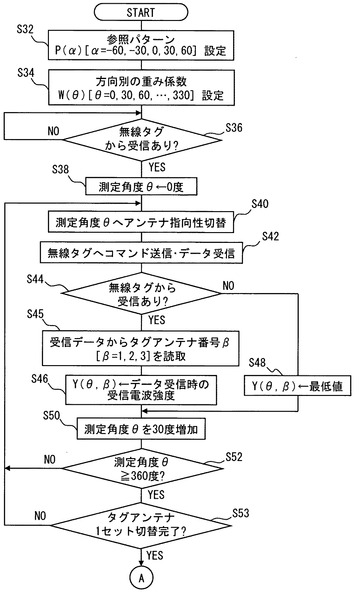
まず、ステップS32では、参照パターンP(α)[α=−60、−30、0、30、60]を設定する。続くステップS34では、方向別の重み係数W(θ)[θ=0、30、60・・・330]を設定する。これらは初期設定であり、S32は、無線タグリーダライタ100に製造段階で設定し、S34は、監視システムの構成装置である無線タグリーダライタ100を設置する際に設定する。
【0060】
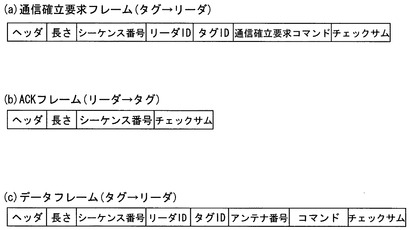
無線タグリーダライタ100は、コマンドを周期的に送信しながら、無線タグ400からの信号を受信できる状態で待機する(S36)。無線タグ400は、無線タグリーダライタ100からのコマンドを受信した場合には、図15(a)に示す通信確立要求フレームを送信する。この送信を無線タグリーダライタ100が受信するとステップS36がYESとなる。この場合、ステップS38にて、測定角度θを0度に設定する。また、このステップS38では、無線タグリーダライタ100は、図15(b)に示すACKフレームを無線タグ400に送信する。
【0061】
続くステップS40では、可変リアクタンス制御部72が、アンテナ部1の指向性を測定角度θに切り替える。続いて、無線タグ400へコマンドを送り、無線タグ400からのデータを受信するための処理を行なう(S42)。
【0062】
無線タグ400は、このステップS42で無線タグリーダライタ100が送信したコマンドを受信した場合には、第1タグアンテナ412、第2タグアンテナ414、第3タグアンテナ416を順番に用いて、図15(c)に示すデータフレームのデータを各アンテナから送信する。なお、図15(c)に示すデータフレームには、アンテナ番号が含まれており、無線タグリーダライタ100は、データフレームに含まれるアンテナ番号から、データフレームがどのタグアンテナにより送信されたかを判断できるようになっている。
【0063】
ステップS42を実行したら、無線タグ400からのデータ受信があったかどうかを判断する(S44)。そして、受信があった場合には(S44:Yes)、受信データからアンテナ番号βを読み取り、さらに、アンテナ部1の指向性を方位角θに設定した際に測定した受信電力Y(θ)として、データ受信時の受信電波強度を設定する(S46)。
【0064】
他方、無線タグ400からの受信が無かった場合には(S44:No)、受信電力Y(θ)として、予め設定されている最低値を設定する(S48)。そして、測定角度θを30度増加し(S50)、測定角度が360度以上か、即ち、0度から330度までの全角度の受信電波強度の測定が完了したかを判断し(S52)、測定が完了するまでは(S52:No)、S40の処理に戻る。なお、図15(c)に示すデータフレームを1回送信するのに要する時間は、ステップS40からステップS52を繰り返して、方位角θを0度から330度まで変化させて各方位角θで受信電波強度を測定するのに要する時間よりも長い時間に設定されている。
【0065】
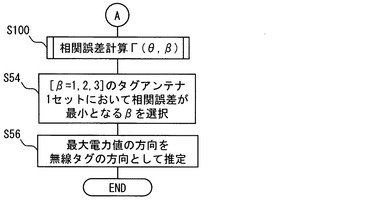
上記ステップS52の判断は、1つのタグアンテナに対する受信電波強度の測定完了の判断である。ステップS52がYESの場合、ステップS53において、タグアンテナ1セット、すなわち、3つのタグアンテナ412、414、416に対して、受信電波強度の測定が完了したかを判断する。この判断がNOである場合にも、ステップS40へ戻る。一方、この判断がYESである場合には、図14のステップS100にて相関誤差Γ(θ、β)を計算する。このステップS100の詳細は後述する。
【0066】
相関誤差Γ(θ、β)を計算したら、ステップS54にて、相関誤差Γが最小のタグアンテナの電力強度パターンを、方向探知に用いる信号として選択する。そして、ステップS56では、ステップS54で選択した電力強度パターンのうち信号強度が最大となる方向を無線タグ400の方向として推定し、推定した方向をコントローラ300へ出力して処理を終了する。
【0067】
なお、このステップS56で方向推定を行った後も、無線タグリーダライタ100は、無線タグ400の方向推定を周期的に行う。その際には、次の2つのうちのいずれかの方法により垂直偏波を主とする電波を取得する。1つ目の方法は、ステップS54で選択したタグアンテナを指定して、無線タグ400に、その指定したタグアンテナのみで信号を送信させる。2つ目は、受信したデータに含まれるアンテナ番号から方向推定に用いる電波であるかどうかを判断する方法である。
【0068】
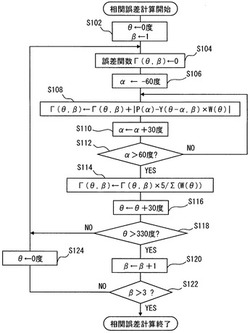
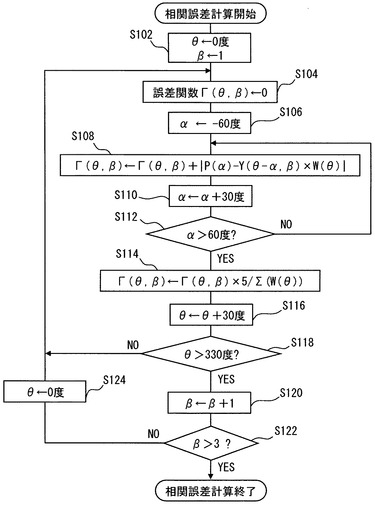
図16は、図14のステップS100における相関誤差の計算処理の詳細フローチャートである。まず、ステップS102では、測定角度θを0度に設定するとともに、アンテナ番号βを、第1タグアンテナ412に対応する「1」に設定する。
【0069】
ステップS104では、誤差関数Γ(θ、β)の値を0(初期値)に設定する。続くステップS106では、参照パターンにおける角度αを−60度(初期値)に設定する。続くステップS108では、下式を用いて相関誤差Γ(θ)を更新する。
【0070】
Γ(θ、β)=Γ(θ、β)+|P(α)−Y(θ−α、β)×W(θ)|
P(α)は、参照パターンの角度αでの電力強度
Y(θ、β)は、無線タグ400がタグアンテナβで送信した電波を、アンテナ部1の指向性を方位角θに設定して受信した際の受信電力強度
上記相関誤差Γ(θ)の算出式において、絶対値記号の中は、角度θ、αにおける相関誤差を意味している。また、受信電力強度Y(θ−α、β)には、重み係数W(θ)を乗じている。この重み係数W(θ)は、記憶装置71に保存されている重み係数リストを参照して設定する。重み係数W(θ)を乗じることにより、電波反射物からの反射を考慮した補正を、各受信電力強度Y(θ−α、β)に対して行っているのである。
【0071】
続くステップS110では角度αに30度を加える。そして、ステップS112では、角度αが60度超かどうかを判断する。この判断は、角度α=−60度〜60度の相関誤差を全部加算し、算出が完了したかを判断するものである。ステップ112がNOであればステップS108に戻り、YESであればステップS114へ進む。
【0072】
ステップS114では、下式を用いて相関誤差Γ(θ、β)を求める。
【0073】
Γ(θ、β)=Γ(θ、β)×5/(Σ(W(θ))
続くステップS116では方位角θに30度を加え、ステップS118では方位角θが330度超か、即ち、0度から330度までの全角度における相関誤差Γ(θ)の算出が完了したかを判断する。ステップS118がNOであればS104の処理に戻り、次の方位角θにおける相関誤差Γ(θ、β)を算出する。一方、ステップS118がYESであれば、ステップS120においてβに1を加える。そして、ステップS122ではβが3を超えたか否かを判断する。βが3を超えていない場合(S122:NO)、ステップ124でθを0度に設定した後、ステップS104に戻る。一方、βが3を超えていれば(S122:YES)、処理を終了する。
【0074】
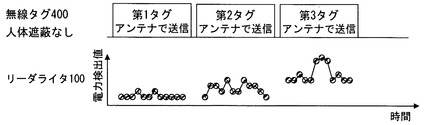
以上のように構成した本実施形態の効果を説明する。図17は、人体による電波遮蔽がない状態で、無線タグ400が第1タグアンテナ412、第2タグアンテナ414、第3タグアンテナ416で順番にデータを送信したときに、無線タグリーダライタ100の電力検出回路6により検出される電力検出値を示している。なお、この図17および次の図18における電力検出値の検出中、無線タグリーダライタ100は、前述した図13で説明したに示したように、測定角度θを順次切り替えている。
【0075】
図6に示したように、無線タグ400の第1〜第3タグアンテナ412、414、416は、互いに直交する方向に配置されている。従って、いずれか1つのタグアンテナは垂直偏波を主とする電波を送信し、残りの2つのタグアンテナのうちの一方は水平偏波を主とする電波を送信する。たとえば、第3タグアンテナ416が垂直偏波を送信し、第2タグアンテナ414は水平偏波を送信する。一方、無線タグリーダライタ100のアンテナ部1は、垂直偏波に対する受信感度がよい。従って、図17に示すように、垂直偏波で電波を送信する第3タグアンテナ416からの電波を受信したときの電力検出値が最も高く、第1、第2タグアンテナ412、414からの電波を受信したときの電力検出値は低くなる。
【0076】
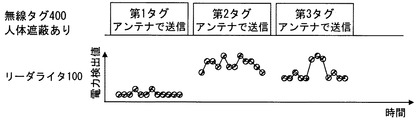
しかしながら、無線タグ400は人に携帯されるものであることから、人体により電波が遮蔽される場合もある。人体遮蔽がある場合、垂直偏波は水平偏波よりも遮蔽される程度が大きく、その結果、人体遮蔽がある場合には、図18に示すように、水平偏波に対する電力検出値が相対的に高くなる。図18の例は、図17と同様に、第3タグアンテナ416が垂直偏波で電波を送信し、第2タグアンテナ414が水平偏波で電波を送信している。しかし、人体遮蔽があるため、無線タグリーダライタ100が受信する電波の電力検出値は、第2タグアンテナ414からの電波を受信したときのほうが、第3タグアンテナ416からの電波を受信したときよりも、全体的に高くなっている。
【0077】
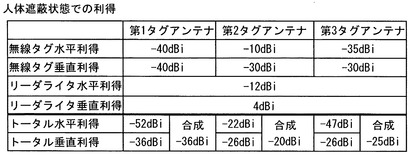
図19は、人体遮蔽がある状態で各タグアンテナ412、414、416が送信した電波を、無線タグリーダライタ100が受信したときの利得を例示する図である。この図19にも示されるように、人体遮蔽がある状態では、水平偏波を送信する第2タグアンテナ414の水平利得が相対的に高い値となる。その結果、この図の最下欄に示す合成利得は、第2タグアンテナ414が最も高くなっている。よって、電力検出回路6により検出される電力検出値は、利得以外の条件が同じであれば、前述の図18に示すように、第2タグアンテナ414の電波を受信したときが最も高くなる。
【0078】
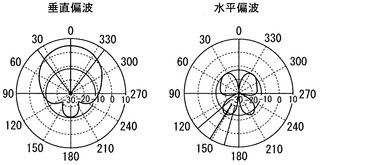
加えて、図20は、無線タグリーダライタ100のアンテナ部1の指向性を例示する図であるが、このアンテナ部1の指向性は、垂直偏波に対しては比較的鋭い指向性を有するが(左図)、水平偏波に対する指向性は広い。そのため、無線タグ400が送信する電波として水平偏波の電波を用いてしまうと、精度の良い方向探知ができない可能性が生じる。しかも、無線タグ400は、どのような向きで人に携帯されるか分からないことから、どのタグアンテナ412、414、416が垂直偏波を送信するか分からない。
【0079】
ここで、前述の図18を見ると分かるように、人体遮蔽状態であっても、電力強度パターンの形状は人体遮蔽がないときと同様のパターンとなる。すなわち、人体遮蔽状態であっても、第3タグアンテナ416で送信した電波を受信した場合の電力検出値は、無線タグ400の存在する方向に指向性が向いたときをピークとするパターンとなる。これに対して、第2タグアンテナ414で送信した電波を受信した場合の電力検出値は、指向性の切り替えを反映したパターンとはならない。
【0080】
このことに着目し、本実施形態では、各タグアンテナの電力強度パターンと参照パターンとの相関値(具体的には相関誤差Γ)をそれぞれ算出するようにした。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関を示す相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。そして、本実施形態では、この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
【0081】
加えて、本実施形態では、無線タグリーダライタ100の周囲に電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重み係数W(θ)を設定しており、この重み係数W(θ)を各電力強度パターンの電力強度Y(θ)に乗じている(S108)。したがって、重み係数W(θ)を乗じた後の各電力強度Y(θ)からなる電力強度パターンは、電波反射物からの反射の影響が軽減されたパターンとなる。そして、相関誤差Γは、重み係数W(θ)を乗じた後の各電力強度Yからなる電力強度パターンと参照パターンとの相関誤差である。よって、無線タグリーダライタ100の周囲に電波反射物が存在していても、相関誤差Γは、電波反射物からの反射の影響が軽減されて、受信電波の偏波の違いをよく反映した値となる。よって、水平偏波の電波を選択してしまうことをより抑制できる。
【0082】
[第2実施形態]
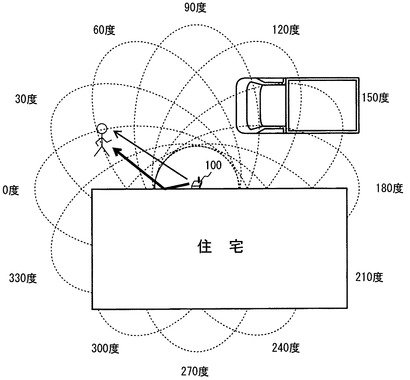
第2実施形態に係る無線タグリーダライタ100について図21、図22を参照して説明する。図21は、第2実施形態の無線タグリーダライタ100が侵入者の無線タグ400の方向を検出する場合の説明図である。
【0083】
第1実施形態の無線タグリーダライタ100は、住宅の正面に取り付けられ、電波反射物は該住宅しか存在していなかった。これに対して、第2実施形態では、住宅の正面側であって、無線タグリーダライタ100の監視領域内に電波を反射するブロック壁が存在している。このため、第2実施形態では、第1実施形態と同様に、住宅の方向の重み係数W(θ)を小さい値にすると共に、ブロック壁の方向の重み係数W(θ)も小さい値に設定する。
【0084】
図22は、第2実施形態での重み係数リストである。第1実施形態と同様に、電波反射物である住宅がある方向(210度〜330度)の重み係数W(θ)は0.2を設定しており、電波反射物であるブロック壁がある方向(30度〜150度)の重み係数W(θ)は、反射角度、距離に応じて0.4、0.6、0.8を設定している。また、反射障害物が無い方向(0度、180度)は重み係数W(θ)を1に設定している。なお、ブロック壁の代わりに生垣が設置されている場合、電波反射率がブロック壁よりも小さいので、例えば、0.5〜0.9等の大きな値に重み係数W(θ)を設定する。
【0085】
[第3実施形態]
第3実施形態に係る監視システムについて図23〜図25を参照して説明する。第1、第2実施形態では、電波反射物の影響を小さくするための重み係数W(θ)は、無線タグリーダライタ100を設置する際に手動操作で記憶装置71に記憶させていた。これに対して、第3実施形態では、電波反射物を検出し、自動的に重み係数W(θ)を決定する。
【0086】
図23は、第3実施形態の無線タグリーダライタ100が侵入者の無線タグ400の方向を検出する場合の説明図である。第3実施形態では、監視領域内である住宅の前にトラックが止められたとき、レーザセンサ200(図1参照)でこれを検出し、トラックによる電波反射の影響を軽減するために、コントローラ300が自動的に無線タグリーダライタ100へ重み係数W(θ)を設定する。ここで、トラックが止められていない場合の重み係数W(θ)は、図12を参照して上述した第1実施形態と同様に、住宅方向(210度〜330度)の重み係数W(θ)が0.2に設定してある。
【0087】
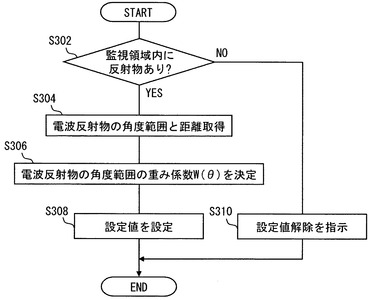
図24は、第3実施形態に係るコントローラ300が監視領域内の電波反射物を検出して無線タグリーダライタ100に対して重み係数W(θ)を自動設定する処理を示すフローチャートである。
【0088】
監視システムのコントローラ300(図1参照)は、レーザセンサ200により、侵入者と共に電波反射物が監視領域内に入っているか監視している。ここで、侵入者とトラック等の電波反射物とは、大きさ(例えば、30度以上の角度にまたがって検出される)、及び、移動の可否(10分以上同じ場所に存在している)を用いて識別する。
【0089】
コントローラ300は、監視領域内に電波反射物があると(S302:Yes)、レーザセンサ200から、電波反射物の存在する角度範囲と距離を取得する(S304)。そして、取得した角度範囲と距離に基づき、重み係数W(θ)を算出する(S306)。具体的には、レーザセンサ200から取得した方角および距離から、まず、無線タグリーダ100に対する電波反射物の角度範囲と距離とを演算する。そして、演算した距離、および、距離が遠くなるほど重み係数Wが小さくなる関係式を用いて、電波反射物の角度範囲の重み係数W(θ)を決定する。そして、決定した重み係数W(θ)を無線タグリーダライタ100に設定する(S308)。
【0090】
一方、電波反射物、例えば、トラックが監視領域外へ移動し、電波監視領域内に電波反射物が無くなると(S302:No)、該電波反射物用の重み係数W(θ)を解除するように無線タグリーダライタ100に指示する(S310)。
【0091】
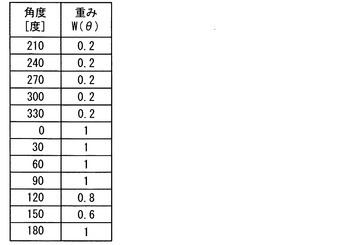
図25は、第3実施形態での重み係数リストである。ここでは、レーザセンサ200により検出された電波反射物(トラック)の方向(120度及び150度)の重み係数Wは、無線タグリーダライタ100とトラックとの距離に応じて、コントローラ300により算出された重み係数W(120度:0.8、150度:0.6)が設定されている。
【0092】
第3実施形態の監視システムは、レーザセンサ200で検出された物体の角度範囲と距離に応じて重み係数W(θ)を自動的に調整する。このため、例えば、無線タグリーダライタ100の監視領域内にトラック等が一時的に駐車した際にも、これをレーザセンサ200で検出し、該トラックによる電波反射の影響を排除して、無線タグ400の方向推定精度の低下を自動的に抑制できる。なお、上述した例では、住宅の方向の重み係数W(θ)については手動設定を行ったが、住宅の方向の重み係数W(θ)についても、第3実施形態の構成によれば、自動設定が可能である。
【0093】
[第4実施形態]
次に、第4実施形態を説明する。第1実施形態では、重み係数W(θ)による補正を、電力強度パターンに対して行っていた。これに対して、第4実施形態では、重み係数W(θ)による補正を相関誤差Γに対して行う。
【0094】
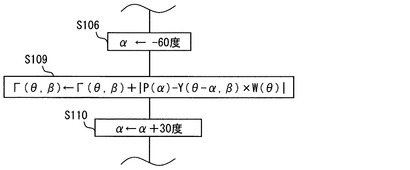
この場合、図16のステップS108に代えて、図26に示すステップS109を実行する。すなわち、下式を用いて相関誤差Γ(θ)を更新する。
【0095】
Γ(θ、β)=Γ(θ、β)+|{P(α)−Y(θ−α、β)}×W(θ)|
上記式は、電力強度の差に対して重み係数W(θ)を乗じており、電力強度の差は、各(θ、α)における相関誤差Γを意味する。よって、上記式は、相関誤差Γを重み係数W(θ)で補正していることになる。なお、このステップS109は特許請求の範囲の相関値補正手段に相当する。
【0096】
このように、相関誤差Γを重み係数W(θ)で補正しても、電力強度パターンを補正した場合と同様に、相関誤差Γは、電波反射物からの反射の影響が軽減されて、受信電波の偏波の違いをよく反映した値となる。よって、水平偏波の電波を選択してしまうことをより抑制できる。
【0097】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0098】
たとえば、前述の実施形態では、3つのタグアンテナ412、414、416から順次送信されて受信する電波の区別を、データフレームの受信成立タイミングおよびそのデータフレームに含まれるアンテナ番号により行っていた。しかし、これ以外にも、無線タグリーダライタ100が、無線タグ400に対して送信に用いるタグアンテナを指示し、無線タグ400は指示されたタグアンテナでデータフレームを送信する構成としてもよい。このようにしても、無線タグリーダライタ100は、受信した電波がどのタグアンテナにより送信されたかを判断することができる。
【0099】
また、前述の実施形態では、相関値として相関誤差Γを算出していた。この場合、値(相関誤差Γ)が大きいほど相関性が低いことになる。しかし、これに限られず、相関値として、相関が高いほど値が大きくなる指標を用いてもよい。
【符号の説明】
【0100】
1:アンテナ部 3:分配器 4:送信部 5:受信部 6:電力検出回路 7:方向探知部 8:通信制御部 10:励振素子 11〜16:非励振素子 17:接地導体 18:可変リアクタンス回路 19:同軸ケーブル 41:符号部 42:変調部 43:増幅部 51:復調部 52:復号部 53:キャリアセンス部 71:記憶装置 72:可変リアクタンス制御部 73:電力パターン生成部 74:反射物処理部(パターン補正手段) 75:相関処理部 76:方向探知信号選択部 77:方向推定部 100:無線タグリーダライタ 200:レーザセンサ 300:コントローラ 400:無線タグ 410:アンテナ部 412:第1タグアンテナ 414:第2タグアンテナ 416:第3タグアンテナ 420:制御部 422:メモリ 424:タイマ 430:送信部 432:符号部 434:変調部 436:増幅部 440:受信部 442:復号部 444:復調部 446:キャリアセンス部
【技術分野】
【0001】
本発明は、無線タグの方向を推定できる無線タグリーダ、およびこの無線タグリーダを用いる監視システムに関するものである。
【背景技術】
【0002】
電波を利用して無線タグから情報を読み取る無線タグシステムは様々な用途で使用されつつあり、このシステムの主要素である無線タグリーダは広範な用途に適用し得るように高機能化が求められている。高機能化の例としては、例えば、無線タグの情報を単純に読み取るだけではなく、その無線タグがどの方向に存在し得るかを特定可能とし、無線タグ所持者の探索に利用したり、無線タグ所持者が適正な方向に存在するか否かの判断に利用したりすることが考えられつつある。
【0003】
無線タグの方向の特定に関連する技術としては、例えば特許文献1のようなものが提案されている。この特許文献1では、複数のアンテナ素子を備えて指向特性を変化させることができるアレーアンテナを用いた電波到来方向探知方法が開示されており、該電波到来方向探知方法では、全方向角360度を12分割したビーム切り替えにより電波の到来方向を推定している。
【0004】
また、特許文献2には、半移動、移動局のアンテナ制御の為のシステムとして、ジャイロコンパスや加速度センサ等を用いて移動体の位置、姿勢、及び方位を検出し、これらをもとにアンテナの姿勢を制御する技術が知られていることが開示されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特許第3836080号公報
【特許文献2】特許第3002612号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1のアレーアンテナは、水平面走査となるように設置されるのが通常であり、この場合、垂直偏波(直線偏波)に対して良好な感度を有する。したがって、方向探知の対象となる電波が垂直偏波の場合に、精度のよい方向探知を行うことが可能となる。
【0007】
しかし、無線タグが人に携帯される場合は、無線タグは様々な向きとなる。したがって、無線タグからのアンテナが一本であると、無線タグからの電波が水平偏波となることもある。しかし、特許文献1のアレーアンテナは、水平偏波に対しては感度が低く、また、指向性が鋭くないことから、無線タグからの電波が水平偏波である場合には方向探知精度が低下してしまうという問題がある。
【0008】
そこで、無線タグに送信アンテナを複数備え、各送信アンテナからそれぞれ電波を送信するとともに、無線タグリーダは、各送信アンテナで送信された電波から、垂直偏波を送信しているアンテナを選択する(すなわち、垂直偏波となっている電波を選択する)アンテナ選択ダイバーシティを行うことが考えられる。
【0009】
前述のように、特許文献1のアレーアンテナは、垂直偏波に対して良好な感度を有する。そこで、上記アンテナ選択ダイバーシティとしては、送信アンテナを切り替えながら無線タグが送信した電波を、アレーアンテナを搭載した無線タグリーダで受信し、無線タグの複数の送信アンテナのうち、最も強い電力強度が得られた送信アンテナを垂直偏波を送信しているアンテナとして特定することが考えられる。
【0010】
しかしながら、電力強度が最も強い場合が偏波一致とならないケースが存在する。例えば、無線タグが後ポケットに入れられている場合には、人体影響により、人体の前方へは垂直偏波が劣化し、相対的に水平偏波が強調される。このような場合には、水平偏波であっても、垂直偏波よりも電力強度が強くなる場合があることから、水平偏波を選択してしまう可能性がある。水平偏波を選択してしまった場合には、前述のように、方向探知精度が低下してしまう。
【0011】
また、特許文献2に記載の技術、すなわち、ジャイロコンパスや加速度センサ等のセンサを用いて移動体の姿勢を検出し、これをもとにアンテナの姿勢を制御する技術は、センサや姿勢を制御する装置が必要であることから、装置全体が高価になってしまうので、無線タグに適用することは現実的ではない。
【0012】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、無線タグの方向探知精度がよい無線タグリーダ、および、この無線タグリーダを用いる監視システムを提供することにある。
【課題を解決するための手段】
【0013】
その目的を達成するための請求項1記載の発明は、
垂直偏波に対する水平面内の指向性を複数の設定角度に切り替え可能に構成されたアレーアンテナと、
前記アレーアンテナの指向性を複数の設定角度に順次切り替える指向性切替手段とを備え、
偏波面が互いに直交する方向となっている複数のタグアンテナからそれぞれ電波を送信する無線タグからの電波を、前記指向性切替手段により指向性を切り替えつつ前記アレーアンテナで受信して、受信した電波の到来方位を推定する無線タグリーダであって、
前記アレーアンテナによって受信した電力強度を測定する受信強度測定手段と、
前記指向性切替手段が前記アレーアンテナの指向性を順次切り替えつつ前記受信強度測定手段によって測定された電力強度から、各タグアンテナから受信した前記設定角度の1周期分の電力強度であるタグアンテナ毎の電力強度パターンを決定する電力強度パターン決定手段と、
前記アレーアンテナが垂直偏波を受信した場合の基準の電力強度パターンである参照パターンを記憶する参照パターン記憶手段と、
前記電力強度パターン決定手段が決定した電力強度パターンと前記参照パターンとの相関を表すパターン相関値をタグアンテナ毎に算出する相関値算出手段と、
到来方位の推定に用いる電波として、前記複数のタグアンテナからそれぞれ受信した電波のうち、前記相関値算出手段が算出したタグアンテナ毎のパターン相関値のうち最も相関性が高い値を示した電波を選択する選択手段とを備えることを特徴とする。
【0014】
このように、本発明では、受信電力強度を単純に用いてタグアンテナを選択するのではなく、連続的に取得する電波強度を、例えばタグからリーダへのデータフレームの受信成立に伴う割込みタイミングとデータフレーム内にあるアンテナ番号情報により、タグアンテナ毎に電力強度パターンを決定し、その電力強度パターンと参照パターンとの相関を表すパターン相関値を算出している。
【0015】
前述のように、人体影響等により水平偏波が相対的に強まったとしても、アレーアンテナが切り替える指向性は垂直偏波の指向性であることから、水平偏波が主となるタグアンテナが送信する際に、受信した電波に基づいて決定された電力強度パターンは、指向性の切り替えを反映したパターンとはならない。一方、参照パターンは、アレーアンテナが垂直偏波に対する指向性を順次切り替えたときに垂直偏波を受信した場合の基準となる電力強度パターンである。よって、パターン相関値は、受信した電波が水平偏波である場合には、参照パターンとの相関性が低いことを示す値となる。したがって、タグアンテナ毎のパターン相関値のうち最も相関性が高い値を示した電波を到来方位の推定に用いる電波として選択するようにすれば、水平偏波の電波を選択してしまうことが抑制される。すなわち、垂直偏波を選択できる可能性が向上する。よって、無線タグの方向探知精度が向上する。
【0016】
請求項2記載の発明は、この無線タグリーダが設置されている周囲環境に基づいて設定角度毎に定まる重みであって、電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する重み設定手段と、
その重み設定手段で設定された重みを用いて、前記電力強度パターン決定手段が決定した各タグアンテナの電力強度パターンにおける電力強度を補正するパターン補正手段とを備え、
前記相関値決定手段は、前記パターン補正手段により補正された後の電力強度パターンと前記参照パターンとを用いて前記パターン相関値を算出することを特徴とする。
【0017】
無線タグリーダの周囲に電波反射物が存在する角度については、その電波反射物からの反射により、受信電力強度が大きくなってしまう可能性がある。しかし、本発明では、反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する。そして、この重みにより、タグアンテナの電力強度パターンにおける電力強度を補正する。したがって、重みによる補正後の電力強度パターンは、電波反射物からの反射の影響が軽減されたパターンとなる。そして、パターン相関値は、重みによる補正後の電力強度パターンを用いて算出する。よって、このパターン相関値も、電波反射物からの反射の影響が軽減された値となり、その結果、偏波の違いをよく反映した値となる。よって、水平偏波の電波を選択してしまうことをより抑制できる。
【0018】
請求項3記載の発明は、前記相関値決定手段は、前記電力強度パターン決定手段が決定した電力強度パターンと前記参照パターンとを用いて前記パターン相関値を算出し、
この無線タグリーダが設置されている周囲環境に基づいて設定角度毎に定まる重みであって、電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する重み設定手段と、
その重み設定手段で設定された重みを用いて、前記相関値決定手段が決定した各タグアンテナのパターン相関値を補正する相関値補正手段を備え、
前記選択手段は、前記相関値補正手段により補正された後の各タグアンテナのパターン相関値に基づいて、到来方位の推定に用いる電波を選択することを特徴とする。
【0019】
前述のように、無線タグリーダの周囲に電波反射物が存在する角度については、その電波反射物からの反射により、受信電力強度が大きくなってしまう可能性がある。しかし、本発明では、反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する。そして、この重みにより、パターン相関値を補正する。したがって、重みによる補正後のパターン相関値は、電波反射物からの反射の影響が軽減された値となり、結果として、偏波の違いをよく反映した値となる。よって、水平偏波の電波を選択してしまうことをより抑制できる。
【0020】
請求項4記載の発明は、前記重み設定手段で設定される重みは、前記アレーアンテナと前記電波反射物との間の距離、および、その電波反射物の電波反射率の少なくとも一方に相関した値となっていることを特徴とする。
【0021】
アレーアンテナと電波反射物との間の距離により、電波反射物からの反射の大きさは変化する。また、電波反射物の電波反射率によっても、その電波反射物からの反射の大きさは変化する。よって、この請求項4のようにすれば、電波反射物からの反射が大きいほど小さくなる重みを設定することができる。
【0022】
請求項5記載の発明は、前記重み設定手段で設定される重みは、前記アレーアンテナと前記電波反射物との間の距離に相関した値であって、その距離が短いほど小さい値に設定されることを特徴とする。
【0023】
このように電波反射物までの距離が短いほど小さい重みに設定すれば、電波反射物が存在することによって強くなってしまっている電力強度を、電波反射物の影響を少なくした強度にすることができる。
【0024】
請求項6記載の発明は、監視領域内の物体の距離と方向とを逐次測定するレーザセンサと、その監視領域を通信範囲として含んでいる請求項5に記載の無線タグリーダと、を備えた監視システムであって、
前記無線タグリーダは、
前記レーザセンサで検出された物体の距離と方向とを逐次取得できるようになっており、
前記重み設定手段で設定される重みは、前記レーザセンサから逐次取得した物体の方向に基づいて定まる設定角度に対して、前記レーザセンサから逐次取得した物体の距離に応じた値となっていることを特徴とする。
【0025】
このようにすれば、レーザセンサにより逐次測定された物体の距離と方向とに基づいて重みが設定されることから、移動物体が存在する場合にも、その移動物体の存在を反映した重みを設定することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の第1実施形態に係る監視システムの模式図である。
【図2】第1実施形態においてコントローラ300が行う処理を示すフローチャートである。
【図3】監視システムで用いられる無線タグリーダライタ100の構成図である。
【図4】無線タグリーダライタ100の送信部4および受信部5の詳細構成を示すブロック図である。
【図5】無線タグ400の構成図である。
【図6】無線タグ400における3つのタグアンテナ412、414、416の配置を概念的に示す図である。
【図7】方向探知部7の構成を詳しく示す図である。
【図8】参照パターンの一例を示す図である。
【図9】指向角を順次変化させることで順次形成される無線タグリーダライタ100の指向性パターンの概略図である。
【図10】指向角を変化させつつ検出した受信電力強度により生成される電力強度パターンの一例を示す図である。
【図11】無線タグリーダライタ100が住宅に隣接して設置されている場合の電波の反射を説明する図である。
【図12】図11の配置環境における重み係数リストの一例である。
【図13】方向探知部7が行なう方向探知処理を示すフローチャートである。
【図14】方向探知部7が行なう方向探知処理を示すフローチャートであって、図13に続いて実行する部分である。
【図15】第1実施形態の監視システムで用いられるデータフレームである。
【図16】図14のステップS100における相関誤差の計算処理の詳細フローチャートである。
【図17】人体による電波遮蔽がない状態で、第1タグアンテナ、第2タグアンテナ、第3タグアンテナが送信し、無線タグリーダライタ100が受信した電波の電力検出値を例示する図である。
【図18】人体による電波遮蔽がある状態で、第1タグアンテナ、第2タグアンテナ、第3タグアンテナが送信し、無線タグリーダライタ100が受信した電波の電力検出値を例示する図である。
【図19】人体遮蔽がある状態で各タグアンテナ412、414、416が送信した電波を、無線タグリーダライタ100が受信したときの利得を例示する図である。
【図20】無線タグリーダライタ100のアンテナ部1の指向性を例示する図 である。
【図21】第2実施形態の無線タグリーダライタ100が侵入者の無線タグ400の方向を検出する場合の説明図である。
【図22】第2実施形態での重み係数リストである。
【図23】第3実施形態の無線タグリーダライタ100が侵入者の無線タグ400の方向を検出する場合の説明図である。
【図24】第3実施形態に係るコントローラ300が重み係数W(θ)を自動設定する処理を示すフローチャートである。
【図25】第3実施形態での重み係数リストである。
【図26】第4実施形態において実行する相関誤差の計算処理の詳細フローチャートの一部である。
【発明を実施するための形態】
【0027】
[第1実施形態]
図1は、本発明の第1実施形態に係る監視システムの模式図である。この監視システムは、無線タグ400の方向(到来方位)を推定できる無線タグリーダライタ100と、監視領域内の物体の距離と方向とを測定するレーザセンサ200とを併用し、監視領域内に侵入した人が無線タグ400を携帯しているか否かをコントローラ300が判別し、携帯していない場合に警告を行う。
【0028】
当該監視システムでのコントローラ300の処理について、図2のフローチャートを参照して概略を説明する。先ず、レーザセンサ200を制御して、監視領域内に侵入者があるか否かを判断する(S12)。この判断が否定判断であればS12を繰り返す。
【0029】
一方、肯定判断であれば、ステップS14へ進み、侵入者の方向と距離を取得する。侵入者の方向はレーザセンサ200の走査方向から取得し、侵入者までの距離はレーザセンサ200がレーザ光を送出してから、このレーザ光の反射光を受光するまでの時間から計測する。
【0030】
続いて、無線タグリーダライタ100から、無線タグ400の方向推定の結果を取得する(S16)。なお、無線タグリーダライタ100が行なう方向推定処理については後述する。続くステップS18では、無線タグリーダライタ100が無線タグ400からの電波を受信できているか否かを判断する。無線タグリーダライタ100の方向推定処理結果には、無線タグ400からの電波を受信できているか否かを示す情報も含まれており、ステップS18の判断はその方向推定処理結果を用いて行なう。
【0031】
無線タグリーダライタ100が無線タグ400からの電波を受信できていない場合には(S18:No)、侵入者が無線タグ400を携帯していないと判断し、警報音等により警報を出す(S20)。一方、無線タグリーダライタ100が無線タグ400からの電波を受信していた場合は(S18:Yes)、更に、レーザセンサ200により検出した侵入者の方向と、無線タグリーダライタ100で推定した無線タグ400の方向とが一致するか否か判断する(S22)。レーザセンサ200により検出した侵入者の方向と、無線タグリーダライタ100で推定した無線タグ400の方向が一致しない場合には(S22:No)、侵入者が無線タグ400を携帯しておらず、監視領域内のいずれかに侵入者と無関係な無線タグ400が存在していると判断し、警報を出す(S20)。方向が一致する場合には(S22:Yes)、侵入した者は無線タグ400を携帯する侵入許可者であるとして、警報を出すことなく処理を終了する。
【0032】
次に、監視システムで用いられる無線タグリーダライタ100の構成について、図3を参照して説明する。無線タグリーダライタ100は、アンテナ部1、分配器3、送信部4、受信部5、電力検出回路6、方向探知部7、通信制御部8を備える。
【0033】
アンテナ部1は、電子制御導波器アレーアンテナ装置であり、1本の励振素子10と、その励振素子10を中心とする半径rの円周上に等間隔に設けられた6本の非励振素子11〜16とを備えている。これらはいずれも直棒形状であり、その長さは、たとえば、いずれも約λ/4となっており、上記半径rもλ/4に設定されている。
【0034】
これら励振素子10、非励振素子11〜16は、接地導体17の上に、その接地導体17から絶縁された状態に設けられており、それらの素子は軸方向が鉛直方向となるように配置されている。その接地導体17は、励振素子10や非励振素子11〜16に対して十分に大きい広さ(たとえば半径λ/2)を有している。
【0035】
励振素子10の給電点は、同軸ケーブル19を介して分配器3に接続されており、無線タグ400から送信され励振素子10によって受信された電波を示す受信信号は分配器3に供給される。
【0036】
非励振素子11〜16には、可変リアクタンス回路18A〜18Fがそれぞれ接続されている。この可変リアクタンス回路18は、電子制御導波器アレーアンテナ装置において一般的に用いられるものと同一の回路であり、たとえば、バイアス電圧が印加されることによってリアクタンス値が変化する可変リアクタンス素子(例えば可変容量ダイオード)を含む回路として構成される。この回路は、高周波的に接地導体17に接続され、方向探知コンピュータ6の後述する可変リアクタンス制御部72によってリアクタンス値が電子的に変化させられる。このリアクタンス値が変化させられることにより、アンテナ部1は方位角が変化する。
【0037】
分配器3は、励振素子10から供給される受信信号を受信部5と電力検出回路6に分配する。送信部4は、通信制御部8から供給されるデータを符号化、変調等してアンテナ部1へ出力する。受信部5は、分配器3から供給された受信信号を復調、復号して、通信制御部8へ供給する。
【0038】
電力検出回路6は、分配器3から供給された受信信号の電力の大きさ(電力値)を検出する回路である。この電力検出回路6は、無線信号の電力を検出する種々の公知の回路を用いることができ、たとえばダイオード検波器を含む回路構成のものである。この電力検出回路6で検出された電力値を示す電力値信号は図示しないAD変換回路を介して方向探知部7に供給される。
【0039】
方向探知部7は、可変リアクタンス回路18を制御しつつ、電力検出回路6から供給される電力値信号に基づいて、無線タグ400の方向探知を行なう。この方向探知部7の構成および作動については後に詳述する。
【0040】
通信制御部8は、送信部4および受信部5を制御するものであり、送信部4からデータを送信させ、且つ、受信部5が受信した無線タグ400からのデータを取得する。図4は、送信部4および受信部5の詳細構成を示すブロック図である。図4に示すように、送信部4は、符号部41、変調部42、増幅部43を備える。
【0041】
符号部41は、通信制御部8から供給された信号を符号化する。変調部42は、符号部41にて符号化された信号を電気的デジタル信号に変換した後に、予め設定されている通信チャンネルを用いて位相偏移変調や周波数偏移変調等の所定の変調方式により変調する。増幅部43は、変調部42で変調された信号を増幅する。増幅された信号は、アンテナ部1から電波として送信される。
【0042】
受信部5は、復調部51、復号部52、キャリアセンス部53を備える。キャリアセンス部53は、送信する前に通信チャンネルにて受信電力レベルを検知し、その受信電力レベルが閾値以上ある場合はそのチャンネルでの送信を見合わせ、再度キャリアセンスする。閾値以下であれば、送信可能と判定し送信を開始する。なお、本実施形態の無線タグリーダライタ100は、2.45GHz、900MHz、433MHz等のRFIDにおいて通常用いられる周波数帯の電波を用いて通信を行う。復調部51は受信信号を復調する。復調された信号は復号部52において符号化され、符号化された信号が通信制御部8に送られる。
【0043】
次に、無線タグ400の構成を説明する。図5は、無線タグ400の構成を示す図である。この図5に示すように、無線タグ400は、アンテナ部410、制御部420、送信部430、受信部440を備える。また、この無線タグ400は、アクティブタグであり、内蔵電源460も備える。また、制御部420は、メモリ422、タイマ424を内蔵する。送信部430は、符号を生成する符号部432、符号を変調する変調部434、変調された信号を増幅する増幅部436から成る。受信部440は、受信信号を復調する復調部444、復調された受信信号から符号を復号する復号部442、無線タグリーダライタとの送受信開始の時に通信の設定を行うキャリアセンス部446から成る。
【0044】
アンテナ部410は、偏波面が互いに直交する3つの第1〜第3タグアンテナ412、414、416を備える。図6は、無線タグ400における、それら3つのタグアンテナ412、414、416の配置を概念的に説明する図である。この図6に示すように、3つのタグアンテナ412、414、416は、本実施形態では、いずれも同じ線状アンテナであり、他の2つのタグアンテナに対して直交するように配置されている。
【0045】
図5に戻り、無線タグ400の制御部420は、タイマ424により周期的に起動し、あるいは、振動センサが無線タグ400に備えられている場合には、振動センサにより振動が検知された後に周期的に起動し、無線タグリーダライタ100からのデータを受信できるかどうかの判定処理を行なう。そして、受信できた場合には、応答信号を無線タグリーダライタ100に送信する。そして、無線タグリーダライタ100との通信が確立した後、無線タグリーダライタ100からの指示に従い、第1、第2、第3タグアンテナ412、414、416を用いて、順番に、無線タグリーダライタ100にデータを送信する。無線タグリーダライタ100は、無線タグ400が送信するこのデータを用いて無線タグ400の方向探知を行なう。
【0046】
次に、無線タグリーダライタ100の方向探知部7の構成を説明する。図7は、方向探知部7の構成を詳しく説明する図である。方向探知部7は、CPU、ROM、RAM等(いずれも図示せず)を備えており、CPUがRAMの一時記憶機能を利用しつつROMに記憶されているプログラムを実行することにより、図7に示す各部72〜77として機能する。
【0047】
記憶装置71は、不揮発性の記憶装置であり、参照パターンが記憶されている。参照パターンとは、後述する電力強度パターンとの相関を算出する参照用の電力強度パターンである。この参照パターンの一例を図8に示す。参照パターンは、理想的な環境(人体やその他の物体などの遮蔽物がない環境)において、垂直偏波を受信したときの電力強度パターンであり、図8の例では、アンテナ部1がとり得る指向角度のうちの5つの連続する指向角度α(α=−60度、−30度、0度、30度、60度)における受信電界強度からなる。また、記憶装置71には、後述する重み係数W(θ)も記憶されている。
【0048】
可変リアクタンス制御部72は、図示しないメモリに記憶されたデジタル電圧値を参照して、内蔵した6個のDA変換器(図示せず)を用いてそのデジタル電圧値をアナログのバイアス電圧値に変換し、このバイアス電圧値をリアクタンス値信号C11(θ)〜C16(θ)として各可変リアクタンス回路18A〜18Fに出力する。上記デジタル電圧値は、予め設定された複数の指向角(本実施形態では、0°から330°まで30°毎)にビームを形成する複数の指向性ビームパターンに対して記憶されている。可変リアクタンス制御部72は、特許請求の範囲の指向性切替手段として機能し、リアクタンス値信号C11(θ)〜C16(θ)を切り替えることにより、指向性ビームパターンを、0°から330°まで、指向角を30°ずつ順次変化させる。図9は、このようにして、指向角を順次変化させることで順次形成される指向性パターンを概略的に示す図である。
【0049】
なお、メモリに記憶されたデジタル電圧値は、実験に基づいて予め求められた値である。たとえば、可変リアクタンス回路18Aの可変容量ダイオードの容量値を少なくすることで、キャパシタ性を持ち可変リアクタンス回路18Aは短縮コンデンサとなり、非励振素子11の電気長が励振素子10よりも短くなって、導波器として働く。一方、可変リアクタンス回18B〜18Fの可変容量ダイオードの容量値を大きくすることで、可変リアクタンス回路18B〜18Fはインダクタンス性を持ち、可変リアクタンス回路18B〜18Fは延長コイルとなり、非励振素子12〜16の電気長が励振素子10よりも長くなり、反射器として働く。こうすることで、可変リアクタンス制御部72は、アンテナ部1の指向角が0度方向である、励振素子11の方向になるように調整できる。
【0050】
電力パターン生成部73は、可変リアクタンス制御部72がアンテナ部1の指向角を、1周期分、すなわち、0°から330°まで変化させる際に、各指向角において電力検出回路6から供給された電力値を用いて電力強度パターンを生成する。この電力強度パターンは、0°〜330°までの指向角とそれら指向角における電力強度とのセットである。また、前述のように、無線タグ400には、3つのタグアンテナ412、414、416が備えられており、無線タグ400は、これら3つのタグアンテナ412、414、416からそれぞれ同じ強度の信号を送信する。電力パターン生成部73は、各タグアンテナ412、414、416から送信される信号に対して、それぞれ、電力強度パターンを生成する。図10に、このようにして生成した電力強度パターンの一例を示す。
【0051】
反射物処理部74は、特許請求の範囲のパターン補正手段に相当しており、電力パターン生成部73が生成したタグアンテナ毎の電力強度パターンを、無線タグリーダライタ100の周囲における電波反射物の存在状況に応じて補正する処理を行なう。この補正処理は、具体的には、無線タグリーダライタ100の周囲における電波反射物の距離や材質に応じて定まる指向角毎の重み係数W(θ)を、電力強度パターンの各指向角θにおける電力強度に乗じる処理である。反射物処理部74における具体的な重み係数は後述する。
【0052】
相関処理部75は、反射物処理部74により処理された後の電力強度パターンと、記憶装置71に記憶されている参照パターンとの相関性を示す値として相関誤差Γを算出する。この相関誤差Γは、3つのタグアンテナ412、414、416の電力強度パターンに対してそれぞれ算出する。なお、相関誤差Γの算出方法の詳細は後述する。
【0053】
方向探知信号選択部76は、相関処理部75において3つのタグアンテナ412、414、416に対してそれぞれ算出した相関誤差Γのうちの最小値を決定し、その最小値に対応する電力強度パターンの信号を、方向探知に用いる信号として選択する。
【0054】
方向推定部77は、方向探知信号選択部76で選択した電力強度パターンを用いて、無線タグ400の方向推定を行なう。本実施形態では、この方向推定に最大電力法を用いる。すなわち、選択した電力強度パターンにおいて信号強度が最大となる方向を無線タグ400の方向として推定する。
【0055】
次に、反射物処理部74における処理を詳しく説明する。前述したように、反射物処理部74は、無線タグリーダライタ100の周囲における電波反射物の距離や材質に応じて定まる指向角毎の重み係数を、電力強度パターンの各指向角における電力強度に乗じる。たとえば、図11に示すように、無線タグリーダライタ100が、住宅に隣接して設置されている場合を例に上記重み係数を説明する。
【0056】
図11に示す例では、無線タグリーダライタ100の背面側に、電波反射物である住宅が存在している。この場合、同図に示すように、30度方向に侵入者(無線タグ400)があったとしても、その30度方向に指向角を設定した場合のみならず、他の角度(たとえば、330度)に指向角を設定した場合にも、受信電力強度が強くなる可能性がある。そこで、電波反射物が存在する方向に対しては、その電波反射物からの電波反射の影響を低減させるため、電波反射物からの電波反射が大きいほど小さくなる重み係数を設定する。
【0057】
図12は、図11の配置環境における重み係数リストの一例であり、反射障害物が無い方向は重み係数W(θ)を1とする一方、反射障害物がある方向(この例では、210度〜330度)の重み係数W(θ)を1よりも小さくする。ここでは、住宅は反射の大きい物体であるため、0.2を設定している。反射物が大きなビルである場合には、さらに小さな係数、たとえば、0.15を設定する。この重み係数W(θ)は、たとえば、無線タグリーダライタ100の設置時に手動操作で設定する。
【0058】
次に、方向探知部7が行なう方向探知処理を図13に示すフローチャートに沿って説明する。また、このフローチャートの説明において、電力パターン生成部73、相関処理部75、方向探知信号選択部76、方向推定部77の処理も説明する。
【0059】
まず、ステップS32では、参照パターンP(α)[α=−60、−30、0、30、60]を設定する。続くステップS34では、方向別の重み係数W(θ)[θ=0、30、60・・・330]を設定する。これらは初期設定であり、S32は、無線タグリーダライタ100に製造段階で設定し、S34は、監視システムの構成装置である無線タグリーダライタ100を設置する際に設定する。
【0060】
無線タグリーダライタ100は、コマンドを周期的に送信しながら、無線タグ400からの信号を受信できる状態で待機する(S36)。無線タグ400は、無線タグリーダライタ100からのコマンドを受信した場合には、図15(a)に示す通信確立要求フレームを送信する。この送信を無線タグリーダライタ100が受信するとステップS36がYESとなる。この場合、ステップS38にて、測定角度θを0度に設定する。また、このステップS38では、無線タグリーダライタ100は、図15(b)に示すACKフレームを無線タグ400に送信する。
【0061】
続くステップS40では、可変リアクタンス制御部72が、アンテナ部1の指向性を測定角度θに切り替える。続いて、無線タグ400へコマンドを送り、無線タグ400からのデータを受信するための処理を行なう(S42)。
【0062】
無線タグ400は、このステップS42で無線タグリーダライタ100が送信したコマンドを受信した場合には、第1タグアンテナ412、第2タグアンテナ414、第3タグアンテナ416を順番に用いて、図15(c)に示すデータフレームのデータを各アンテナから送信する。なお、図15(c)に示すデータフレームには、アンテナ番号が含まれており、無線タグリーダライタ100は、データフレームに含まれるアンテナ番号から、データフレームがどのタグアンテナにより送信されたかを判断できるようになっている。
【0063】
ステップS42を実行したら、無線タグ400からのデータ受信があったかどうかを判断する(S44)。そして、受信があった場合には(S44:Yes)、受信データからアンテナ番号βを読み取り、さらに、アンテナ部1の指向性を方位角θに設定した際に測定した受信電力Y(θ)として、データ受信時の受信電波強度を設定する(S46)。
【0064】
他方、無線タグ400からの受信が無かった場合には(S44:No)、受信電力Y(θ)として、予め設定されている最低値を設定する(S48)。そして、測定角度θを30度増加し(S50)、測定角度が360度以上か、即ち、0度から330度までの全角度の受信電波強度の測定が完了したかを判断し(S52)、測定が完了するまでは(S52:No)、S40の処理に戻る。なお、図15(c)に示すデータフレームを1回送信するのに要する時間は、ステップS40からステップS52を繰り返して、方位角θを0度から330度まで変化させて各方位角θで受信電波強度を測定するのに要する時間よりも長い時間に設定されている。
【0065】
上記ステップS52の判断は、1つのタグアンテナに対する受信電波強度の測定完了の判断である。ステップS52がYESの場合、ステップS53において、タグアンテナ1セット、すなわち、3つのタグアンテナ412、414、416に対して、受信電波強度の測定が完了したかを判断する。この判断がNOである場合にも、ステップS40へ戻る。一方、この判断がYESである場合には、図14のステップS100にて相関誤差Γ(θ、β)を計算する。このステップS100の詳細は後述する。
【0066】
相関誤差Γ(θ、β)を計算したら、ステップS54にて、相関誤差Γが最小のタグアンテナの電力強度パターンを、方向探知に用いる信号として選択する。そして、ステップS56では、ステップS54で選択した電力強度パターンのうち信号強度が最大となる方向を無線タグ400の方向として推定し、推定した方向をコントローラ300へ出力して処理を終了する。
【0067】
なお、このステップS56で方向推定を行った後も、無線タグリーダライタ100は、無線タグ400の方向推定を周期的に行う。その際には、次の2つのうちのいずれかの方法により垂直偏波を主とする電波を取得する。1つ目の方法は、ステップS54で選択したタグアンテナを指定して、無線タグ400に、その指定したタグアンテナのみで信号を送信させる。2つ目は、受信したデータに含まれるアンテナ番号から方向推定に用いる電波であるかどうかを判断する方法である。
【0068】
図16は、図14のステップS100における相関誤差の計算処理の詳細フローチャートである。まず、ステップS102では、測定角度θを0度に設定するとともに、アンテナ番号βを、第1タグアンテナ412に対応する「1」に設定する。
【0069】
ステップS104では、誤差関数Γ(θ、β)の値を0(初期値)に設定する。続くステップS106では、参照パターンにおける角度αを−60度(初期値)に設定する。続くステップS108では、下式を用いて相関誤差Γ(θ)を更新する。
【0070】
Γ(θ、β)=Γ(θ、β)+|P(α)−Y(θ−α、β)×W(θ)|
P(α)は、参照パターンの角度αでの電力強度
Y(θ、β)は、無線タグ400がタグアンテナβで送信した電波を、アンテナ部1の指向性を方位角θに設定して受信した際の受信電力強度
上記相関誤差Γ(θ)の算出式において、絶対値記号の中は、角度θ、αにおける相関誤差を意味している。また、受信電力強度Y(θ−α、β)には、重み係数W(θ)を乗じている。この重み係数W(θ)は、記憶装置71に保存されている重み係数リストを参照して設定する。重み係数W(θ)を乗じることにより、電波反射物からの反射を考慮した補正を、各受信電力強度Y(θ−α、β)に対して行っているのである。
【0071】
続くステップS110では角度αに30度を加える。そして、ステップS112では、角度αが60度超かどうかを判断する。この判断は、角度α=−60度〜60度の相関誤差を全部加算し、算出が完了したかを判断するものである。ステップ112がNOであればステップS108に戻り、YESであればステップS114へ進む。
【0072】
ステップS114では、下式を用いて相関誤差Γ(θ、β)を求める。
【0073】
Γ(θ、β)=Γ(θ、β)×5/(Σ(W(θ))
続くステップS116では方位角θに30度を加え、ステップS118では方位角θが330度超か、即ち、0度から330度までの全角度における相関誤差Γ(θ)の算出が完了したかを判断する。ステップS118がNOであればS104の処理に戻り、次の方位角θにおける相関誤差Γ(θ、β)を算出する。一方、ステップS118がYESであれば、ステップS120においてβに1を加える。そして、ステップS122ではβが3を超えたか否かを判断する。βが3を超えていない場合(S122:NO)、ステップ124でθを0度に設定した後、ステップS104に戻る。一方、βが3を超えていれば(S122:YES)、処理を終了する。
【0074】
以上のように構成した本実施形態の効果を説明する。図17は、人体による電波遮蔽がない状態で、無線タグ400が第1タグアンテナ412、第2タグアンテナ414、第3タグアンテナ416で順番にデータを送信したときに、無線タグリーダライタ100の電力検出回路6により検出される電力検出値を示している。なお、この図17および次の図18における電力検出値の検出中、無線タグリーダライタ100は、前述した図13で説明したに示したように、測定角度θを順次切り替えている。
【0075】
図6に示したように、無線タグ400の第1〜第3タグアンテナ412、414、416は、互いに直交する方向に配置されている。従って、いずれか1つのタグアンテナは垂直偏波を主とする電波を送信し、残りの2つのタグアンテナのうちの一方は水平偏波を主とする電波を送信する。たとえば、第3タグアンテナ416が垂直偏波を送信し、第2タグアンテナ414は水平偏波を送信する。一方、無線タグリーダライタ100のアンテナ部1は、垂直偏波に対する受信感度がよい。従って、図17に示すように、垂直偏波で電波を送信する第3タグアンテナ416からの電波を受信したときの電力検出値が最も高く、第1、第2タグアンテナ412、414からの電波を受信したときの電力検出値は低くなる。
【0076】
しかしながら、無線タグ400は人に携帯されるものであることから、人体により電波が遮蔽される場合もある。人体遮蔽がある場合、垂直偏波は水平偏波よりも遮蔽される程度が大きく、その結果、人体遮蔽がある場合には、図18に示すように、水平偏波に対する電力検出値が相対的に高くなる。図18の例は、図17と同様に、第3タグアンテナ416が垂直偏波で電波を送信し、第2タグアンテナ414が水平偏波で電波を送信している。しかし、人体遮蔽があるため、無線タグリーダライタ100が受信する電波の電力検出値は、第2タグアンテナ414からの電波を受信したときのほうが、第3タグアンテナ416からの電波を受信したときよりも、全体的に高くなっている。
【0077】
図19は、人体遮蔽がある状態で各タグアンテナ412、414、416が送信した電波を、無線タグリーダライタ100が受信したときの利得を例示する図である。この図19にも示されるように、人体遮蔽がある状態では、水平偏波を送信する第2タグアンテナ414の水平利得が相対的に高い値となる。その結果、この図の最下欄に示す合成利得は、第2タグアンテナ414が最も高くなっている。よって、電力検出回路6により検出される電力検出値は、利得以外の条件が同じであれば、前述の図18に示すように、第2タグアンテナ414の電波を受信したときが最も高くなる。
【0078】
加えて、図20は、無線タグリーダライタ100のアンテナ部1の指向性を例示する図であるが、このアンテナ部1の指向性は、垂直偏波に対しては比較的鋭い指向性を有するが(左図)、水平偏波に対する指向性は広い。そのため、無線タグ400が送信する電波として水平偏波の電波を用いてしまうと、精度の良い方向探知ができない可能性が生じる。しかも、無線タグ400は、どのような向きで人に携帯されるか分からないことから、どのタグアンテナ412、414、416が垂直偏波を送信するか分からない。
【0079】
ここで、前述の図18を見ると分かるように、人体遮蔽状態であっても、電力強度パターンの形状は人体遮蔽がないときと同様のパターンとなる。すなわち、人体遮蔽状態であっても、第3タグアンテナ416で送信した電波を受信した場合の電力検出値は、無線タグ400の存在する方向に指向性が向いたときをピークとするパターンとなる。これに対して、第2タグアンテナ414で送信した電波を受信した場合の電力検出値は、指向性の切り替えを反映したパターンとはならない。
【0080】
このことに着目し、本実施形態では、各タグアンテナの電力強度パターンと参照パターンとの相関値(具体的には相関誤差Γ)をそれぞれ算出するようにした。参照パターンは、理想的な環境で、アンテナ部1が指向性を順次切り替えたときに垂直偏波を受信した場合の電力強度パターンである。よって、この参照パターンと各タグアンテナ412、414、416から受信した電波の受信電力強度パターンとの相関を示す相関誤差Γは、受信した電波が水平偏波を主とする場合に大きな値となる。そして、本実施形態では、この相関誤差Γが最小となる電力強度パターンを方向推定用のパターンとして選択しているので、選択したパターンは垂直偏波を主とする電波を受信したときのパターンである可能性が高い。よって、高い精度で無線タグ400の方向探知を行なうことができる。
【0081】
加えて、本実施形態では、無線タグリーダライタ100の周囲に電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重み係数W(θ)を設定しており、この重み係数W(θ)を各電力強度パターンの電力強度Y(θ)に乗じている(S108)。したがって、重み係数W(θ)を乗じた後の各電力強度Y(θ)からなる電力強度パターンは、電波反射物からの反射の影響が軽減されたパターンとなる。そして、相関誤差Γは、重み係数W(θ)を乗じた後の各電力強度Yからなる電力強度パターンと参照パターンとの相関誤差である。よって、無線タグリーダライタ100の周囲に電波反射物が存在していても、相関誤差Γは、電波反射物からの反射の影響が軽減されて、受信電波の偏波の違いをよく反映した値となる。よって、水平偏波の電波を選択してしまうことをより抑制できる。
【0082】
[第2実施形態]
第2実施形態に係る無線タグリーダライタ100について図21、図22を参照して説明する。図21は、第2実施形態の無線タグリーダライタ100が侵入者の無線タグ400の方向を検出する場合の説明図である。
【0083】
第1実施形態の無線タグリーダライタ100は、住宅の正面に取り付けられ、電波反射物は該住宅しか存在していなかった。これに対して、第2実施形態では、住宅の正面側であって、無線タグリーダライタ100の監視領域内に電波を反射するブロック壁が存在している。このため、第2実施形態では、第1実施形態と同様に、住宅の方向の重み係数W(θ)を小さい値にすると共に、ブロック壁の方向の重み係数W(θ)も小さい値に設定する。
【0084】
図22は、第2実施形態での重み係数リストである。第1実施形態と同様に、電波反射物である住宅がある方向(210度〜330度)の重み係数W(θ)は0.2を設定しており、電波反射物であるブロック壁がある方向(30度〜150度)の重み係数W(θ)は、反射角度、距離に応じて0.4、0.6、0.8を設定している。また、反射障害物が無い方向(0度、180度)は重み係数W(θ)を1に設定している。なお、ブロック壁の代わりに生垣が設置されている場合、電波反射率がブロック壁よりも小さいので、例えば、0.5〜0.9等の大きな値に重み係数W(θ)を設定する。
【0085】
[第3実施形態]
第3実施形態に係る監視システムについて図23〜図25を参照して説明する。第1、第2実施形態では、電波反射物の影響を小さくするための重み係数W(θ)は、無線タグリーダライタ100を設置する際に手動操作で記憶装置71に記憶させていた。これに対して、第3実施形態では、電波反射物を検出し、自動的に重み係数W(θ)を決定する。
【0086】
図23は、第3実施形態の無線タグリーダライタ100が侵入者の無線タグ400の方向を検出する場合の説明図である。第3実施形態では、監視領域内である住宅の前にトラックが止められたとき、レーザセンサ200(図1参照)でこれを検出し、トラックによる電波反射の影響を軽減するために、コントローラ300が自動的に無線タグリーダライタ100へ重み係数W(θ)を設定する。ここで、トラックが止められていない場合の重み係数W(θ)は、図12を参照して上述した第1実施形態と同様に、住宅方向(210度〜330度)の重み係数W(θ)が0.2に設定してある。
【0087】
図24は、第3実施形態に係るコントローラ300が監視領域内の電波反射物を検出して無線タグリーダライタ100に対して重み係数W(θ)を自動設定する処理を示すフローチャートである。
【0088】
監視システムのコントローラ300(図1参照)は、レーザセンサ200により、侵入者と共に電波反射物が監視領域内に入っているか監視している。ここで、侵入者とトラック等の電波反射物とは、大きさ(例えば、30度以上の角度にまたがって検出される)、及び、移動の可否(10分以上同じ場所に存在している)を用いて識別する。
【0089】
コントローラ300は、監視領域内に電波反射物があると(S302:Yes)、レーザセンサ200から、電波反射物の存在する角度範囲と距離を取得する(S304)。そして、取得した角度範囲と距離に基づき、重み係数W(θ)を算出する(S306)。具体的には、レーザセンサ200から取得した方角および距離から、まず、無線タグリーダ100に対する電波反射物の角度範囲と距離とを演算する。そして、演算した距離、および、距離が遠くなるほど重み係数Wが小さくなる関係式を用いて、電波反射物の角度範囲の重み係数W(θ)を決定する。そして、決定した重み係数W(θ)を無線タグリーダライタ100に設定する(S308)。
【0090】
一方、電波反射物、例えば、トラックが監視領域外へ移動し、電波監視領域内に電波反射物が無くなると(S302:No)、該電波反射物用の重み係数W(θ)を解除するように無線タグリーダライタ100に指示する(S310)。
【0091】
図25は、第3実施形態での重み係数リストである。ここでは、レーザセンサ200により検出された電波反射物(トラック)の方向(120度及び150度)の重み係数Wは、無線タグリーダライタ100とトラックとの距離に応じて、コントローラ300により算出された重み係数W(120度:0.8、150度:0.6)が設定されている。
【0092】
第3実施形態の監視システムは、レーザセンサ200で検出された物体の角度範囲と距離に応じて重み係数W(θ)を自動的に調整する。このため、例えば、無線タグリーダライタ100の監視領域内にトラック等が一時的に駐車した際にも、これをレーザセンサ200で検出し、該トラックによる電波反射の影響を排除して、無線タグ400の方向推定精度の低下を自動的に抑制できる。なお、上述した例では、住宅の方向の重み係数W(θ)については手動設定を行ったが、住宅の方向の重み係数W(θ)についても、第3実施形態の構成によれば、自動設定が可能である。
【0093】
[第4実施形態]
次に、第4実施形態を説明する。第1実施形態では、重み係数W(θ)による補正を、電力強度パターンに対して行っていた。これに対して、第4実施形態では、重み係数W(θ)による補正を相関誤差Γに対して行う。
【0094】
この場合、図16のステップS108に代えて、図26に示すステップS109を実行する。すなわち、下式を用いて相関誤差Γ(θ)を更新する。
【0095】
Γ(θ、β)=Γ(θ、β)+|{P(α)−Y(θ−α、β)}×W(θ)|
上記式は、電力強度の差に対して重み係数W(θ)を乗じており、電力強度の差は、各(θ、α)における相関誤差Γを意味する。よって、上記式は、相関誤差Γを重み係数W(θ)で補正していることになる。なお、このステップS109は特許請求の範囲の相関値補正手段に相当する。
【0096】
このように、相関誤差Γを重み係数W(θ)で補正しても、電力強度パターンを補正した場合と同様に、相関誤差Γは、電波反射物からの反射の影響が軽減されて、受信電波の偏波の違いをよく反映した値となる。よって、水平偏波の電波を選択してしまうことをより抑制できる。
【0097】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0098】
たとえば、前述の実施形態では、3つのタグアンテナ412、414、416から順次送信されて受信する電波の区別を、データフレームの受信成立タイミングおよびそのデータフレームに含まれるアンテナ番号により行っていた。しかし、これ以外にも、無線タグリーダライタ100が、無線タグ400に対して送信に用いるタグアンテナを指示し、無線タグ400は指示されたタグアンテナでデータフレームを送信する構成としてもよい。このようにしても、無線タグリーダライタ100は、受信した電波がどのタグアンテナにより送信されたかを判断することができる。
【0099】
また、前述の実施形態では、相関値として相関誤差Γを算出していた。この場合、値(相関誤差Γ)が大きいほど相関性が低いことになる。しかし、これに限られず、相関値として、相関が高いほど値が大きくなる指標を用いてもよい。
【符号の説明】
【0100】
1:アンテナ部 3:分配器 4:送信部 5:受信部 6:電力検出回路 7:方向探知部 8:通信制御部 10:励振素子 11〜16:非励振素子 17:接地導体 18:可変リアクタンス回路 19:同軸ケーブル 41:符号部 42:変調部 43:増幅部 51:復調部 52:復号部 53:キャリアセンス部 71:記憶装置 72:可変リアクタンス制御部 73:電力パターン生成部 74:反射物処理部(パターン補正手段) 75:相関処理部 76:方向探知信号選択部 77:方向推定部 100:無線タグリーダライタ 200:レーザセンサ 300:コントローラ 400:無線タグ 410:アンテナ部 412:第1タグアンテナ 414:第2タグアンテナ 416:第3タグアンテナ 420:制御部 422:メモリ 424:タイマ 430:送信部 432:符号部 434:変調部 436:増幅部 440:受信部 442:復号部 444:復調部 446:キャリアセンス部
【特許請求の範囲】
【請求項1】
垂直偏波に対する水平面内の指向性を複数の設定角度に切り替え可能に構成されたアレーアンテナと、
前記アレーアンテナの指向性を複数の設定角度に順次切り替える指向性切替手段とを備え、
偏波面が互いに直交する方向となっている複数のタグアンテナからそれぞれ電波を送信する無線タグからの電波を、前記指向性切替手段により指向性を切り替えつつ前記アレーアンテナで受信して、受信した電波の到来方位を推定する無線タグリーダであって、
前記アレーアンテナによって受信した電力強度を測定する受信強度測定手段と、
前記指向性切替手段が前記アレーアンテナの指向性を順次切り替えつつ前記受信強度測定手段によって測定された電力強度から、各タグアンテナから受信した前記設定角度の1周期分の電力強度であるタグアンテナ毎の電力強度パターンを決定する電力強度パターン決定手段と、
前記アレーアンテナが垂直偏波を受信した場合の基準の電力強度パターンである参照パターンを記憶する参照パターン記憶手段と、
前記電力強度パターン決定手段が決定した電力強度パターンと前記参照パターンとの相関を表すパターン相関値をタグアンテナ毎に算出する相関値算出手段と、
到来方位の推定に用いる電波として、前記複数のタグアンテナからそれぞれ受信した電波のうち、前記相関値算出手段が算出したタグアンテナ毎のパターン相関値のうち最も相関性が高い値を示した電波を選択する選択手段とを備えることを特徴とする無線タグリーダ。
【請求項2】
請求項1において、
この無線タグリーダが設置されている周囲環境に基づいて設定角度毎に定まる重みであって、電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する重み設定手段と、
その重み設定手段で設定された重みを用いて、前記電力強度パターン決定手段が決定した各タグアンテナの電力強度パターンにおける電力強度を補正するパターン補正手段とを備え、
前記相関値決定手段は、前記パターン補正手段により補正された後の電力強度パターンと前記参照パターンとを用いて前記パターン相関値を算出することを特徴とする無線タグリーダ。
【請求項3】
請求項1において、
前記相関値決定手段は、前記電力強度パターン決定手段が決定した電力強度パターンと前記参照パターンとを用いて前記パターン相関値を算出し、
この無線タグリーダが設置されている周囲環境に基づいて設定角度毎に定まる重みであって、電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する重み設定手段と、
その重み設定手段で設定された重みを用いて、前記相関値決定手段が決定した各タグアンテナのパターン相関値を補正する相関値補正手段を備え、
前記選択手段は、前記相関値補正手段により補正された後の各タグアンテナのパターン相関値に基づいて、到来方位の推定に用いる電波を選択することを特徴とする無線タグリーダ。
【請求項4】
請求項2または3において、
前記重み設定手段で設定される重みは、前記アレーアンテナと前記電波反射物との間の距離、および、その電波反射物の電波反射率の少なくとも一方に相関した値となっていることを特徴とする無線タグリーダ。
【請求項5】
請求項4において、
前記重み設定手段で設定される重みは、前記アレーアンテナと前記電波反射物との間の距離に相関した値であって、その距離が短いほど小さい値に設定されることを特徴とする無線タグリーダ。
【請求項6】
監視領域内の物体の距離と方向とを逐次測定するレーザセンサと、その監視領域を通信範囲として含んでいる請求項5に記載の無線タグリーダと、を備えた監視システムであって、
前記無線タグリーダは、
前記レーザセンサで検出された物体の距離と方向とを逐次取得できるようになっており、
前記重み設定手段で設定される重みは、前記レーザセンサから逐次取得した物体の方向に基づいて定まる設定角度に対して、前記レーザセンサから逐次取得した物体の距離に応じた値となっていることを特徴とする監視システム。
【請求項1】
垂直偏波に対する水平面内の指向性を複数の設定角度に切り替え可能に構成されたアレーアンテナと、
前記アレーアンテナの指向性を複数の設定角度に順次切り替える指向性切替手段とを備え、
偏波面が互いに直交する方向となっている複数のタグアンテナからそれぞれ電波を送信する無線タグからの電波を、前記指向性切替手段により指向性を切り替えつつ前記アレーアンテナで受信して、受信した電波の到来方位を推定する無線タグリーダであって、
前記アレーアンテナによって受信した電力強度を測定する受信強度測定手段と、
前記指向性切替手段が前記アレーアンテナの指向性を順次切り替えつつ前記受信強度測定手段によって測定された電力強度から、各タグアンテナから受信した前記設定角度の1周期分の電力強度であるタグアンテナ毎の電力強度パターンを決定する電力強度パターン決定手段と、
前記アレーアンテナが垂直偏波を受信した場合の基準の電力強度パターンである参照パターンを記憶する参照パターン記憶手段と、
前記電力強度パターン決定手段が決定した電力強度パターンと前記参照パターンとの相関を表すパターン相関値をタグアンテナ毎に算出する相関値算出手段と、
到来方位の推定に用いる電波として、前記複数のタグアンテナからそれぞれ受信した電波のうち、前記相関値算出手段が算出したタグアンテナ毎のパターン相関値のうち最も相関性が高い値を示した電波を選択する選択手段とを備えることを特徴とする無線タグリーダ。
【請求項2】
請求項1において、
この無線タグリーダが設置されている周囲環境に基づいて設定角度毎に定まる重みであって、電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する重み設定手段と、
その重み設定手段で設定された重みを用いて、前記電力強度パターン決定手段が決定した各タグアンテナの電力強度パターンにおける電力強度を補正するパターン補正手段とを備え、
前記相関値決定手段は、前記パターン補正手段により補正された後の電力強度パターンと前記参照パターンとを用いて前記パターン相関値を算出することを特徴とする無線タグリーダ。
【請求項3】
請求項1において、
前記相関値決定手段は、前記電力強度パターン決定手段が決定した電力強度パターンと前記参照パターンとを用いて前記パターン相関値を算出し、
この無線タグリーダが設置されている周囲環境に基づいて設定角度毎に定まる重みであって、電波反射物が存在する角度については、その電波反射物からの反射が大きいほど小さくなる重みを設定する重み設定手段と、
その重み設定手段で設定された重みを用いて、前記相関値決定手段が決定した各タグアンテナのパターン相関値を補正する相関値補正手段を備え、
前記選択手段は、前記相関値補正手段により補正された後の各タグアンテナのパターン相関値に基づいて、到来方位の推定に用いる電波を選択することを特徴とする無線タグリーダ。
【請求項4】
請求項2または3において、
前記重み設定手段で設定される重みは、前記アレーアンテナと前記電波反射物との間の距離、および、その電波反射物の電波反射率の少なくとも一方に相関した値となっていることを特徴とする無線タグリーダ。
【請求項5】
請求項4において、
前記重み設定手段で設定される重みは、前記アレーアンテナと前記電波反射物との間の距離に相関した値であって、その距離が短いほど小さい値に設定されることを特徴とする無線タグリーダ。
【請求項6】
監視領域内の物体の距離と方向とを逐次測定するレーザセンサと、その監視領域を通信範囲として含んでいる請求項5に記載の無線タグリーダと、を備えた監視システムであって、
前記無線タグリーダは、
前記レーザセンサで検出された物体の距離と方向とを逐次取得できるようになっており、
前記重み設定手段で設定される重みは、前記レーザセンサから逐次取得した物体の方向に基づいて定まる設定角度に対して、前記レーザセンサから逐次取得した物体の距離に応じた値となっていることを特徴とする監視システム。
【図1】


【図2】
【図3】

【図4】

【図5】
【図6】
【図7】
【図8】

【図9】

【図10】
【図11】

【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【公開番号】特開2013−61151(P2013−61151A)
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願番号】特願2011−197744(P2011−197744)
【出願日】平成23年9月10日(2011.9.10)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成25年4月4日(2013.4.4)
【国際特許分類】
【出願日】平成23年9月10日(2011.9.10)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]