
無線タグ距離算出システムおよび無線タグリーダ

【課題】無線タグの電池消耗を抑制しつつ、複数の無線タグリーダが無線タグとの間の距離をそれぞれ算出することができる無線タグ距離算出システムを提供する。
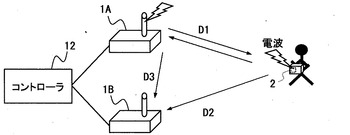
【解決手段】無線タグリーダ1Aは、タグコマンドの送信完了時点t3から、無線タグ2から送信されるACKの受信完了時点t10まで時間TAを計測し、計測した時間TAをブロードキャスト送信する。無線タグリーダ1Bは、タグコマンドおよびACKを受信(傍受)して、タグコマンドの受信完了時点t4からACKの受信完了時点t11までの時間TBを計測し、また、無線タグリーダ1Aから送信される時間データ(TA)を受信する。これら時間TA、TBと、予め記憶しているTtag、Tres、無線タグリーダ1Aと無線タグリーダ1Bとの間の距離D3とを用いて、無線タグリーダ1Bは、無線タグ2との間の距離D2を算出する。よって、無線タグ2と通信を行うことなく距離D2を算出できる。
【解決手段】無線タグリーダ1Aは、タグコマンドの送信完了時点t3から、無線タグ2から送信されるACKの受信完了時点t10まで時間TAを計測し、計測した時間TAをブロードキャスト送信する。無線タグリーダ1Bは、タグコマンドおよびACKを受信(傍受)して、タグコマンドの受信完了時点t4からACKの受信完了時点t11までの時間TBを計測し、また、無線タグリーダ1Aから送信される時間データ(TA)を受信する。これら時間TA、TBと、予め記憶しているTtag、Tres、無線タグリーダ1Aと無線タグリーダ1Bとの間の距離D3とを用いて、無線タグリーダ1Bは、無線タグ2との間の距離D2を算出する。よって、無線タグ2と通信を行うことなく距離D2を算出できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線タグリーダが無線タグまでの距離を算出する無線タグ距離算出システムおよびこのシステムを構成する無線タグリーダに関し、特に、無線タグリーダを複数備えた無線タグ距離算出システムおよびこのシステムを構成する無線タグリーダに関する。
【背景技術】
【0002】
電波の伝播時間を用いて距離を測定する方法が種々知られている。たとえば、特許文献1では、2つの無線局間の距離を測定するのにフレーム同期パターンを使用しており、第1の無線局は、フレーム同期パターンを送信してから、第2の無線局からのフレーム同期パターンを受信するまでの時間を計測し、この時間から距離を算出している。
【0003】
また、特許文献2には、実際の通信規格において、電波の伝播時間を用いて距離を計測する方法を適用した場合の詳細が記述されている。この特許文献2では、測定側から被測定側に電波を送信し、被測定側から測定側へ返信をさせている。そして、測定側では、自分が信号を送出し終わってから被測定側からの信号を受信し終わるまでの時間を計測している。この計測した時間と、信号送信時間と、信号返信の処理時間とから、距離による遅延時間を求め、この遅延時間から距離を求めている。
【0004】
また、特許文献3では、基地局間での距離測定を、複数の基地局間で行うことにより、各基地局の位置を測定することが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平1−235884号公報
【特許文献2】特開2008−232828号公報
【特許文献3】特開2004−85545号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
人や移動物体が無線タグを持つことで、無線タグを持っている人・移動物体を特定し、特定の無線タグとの間で通信を行ないたい場合が考えられる。たとえば、空港では、空港の各所に無線タグリーダを配置するとともに、搭乗予定客に表示機能付き無線タグを持ってもらい、無線タグと無線タグリーダとが通信を行って、搭乗予定客がどこにいるかをリアルタイムで把握することが考えられる。搭乗予定客がどこにいるかをリアルタイムで把握することができれば、搭乗時刻・ゲートの変更連絡や、搭乗時刻に遅れそうな客が持っている無線タグに対して案内情報を送信することや、その客を探すことなどが可能となる。
【0007】
ここで、無線タグリーダは、無線タグからの電波強度をもとに無線タグとの距離を算出することも考えられる。しかし、電波強度は、反射の影響によって近い距離でも弱くなったり、逆に、遠い距離でも強くなったりする。従って、電波強度を用いると、距離算出精度が十分ではない。そこで、特許文献1〜3に記載されているように、無線機同士が通信して距離を算出する技術を用いることが考えられる。
【0008】
しかし、同じ無線タグに対する距離を複数の無線タグリーダが測定したい場合において、特許文献1〜3のように無線機同士が通信することで距離を計算する方法を適用すると、無線タグは複数の無線タグリーダとそれぞれ通信しなければならない。その結果、無線タグの電池消耗が激しくなり、実用的な電池寿命が得られないおそれもある。
【0009】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、無線タグの電池消耗を抑制しつつ、複数の無線タグリーダが無線タグとの間の距離をそれぞれ算出することができる無線タグ距離算出システム、および、そのシステムを構成する無線タグリーダを提供することにある。
【課題を解決するための手段】
【0010】
その目的を達成するための請求項1記載の発明によれば、第1無線タグリーダは、無線タグと通信を行って信号送受時間から無線タグとの距離を算出するが、第2無線タグリーダは、第1無線タグリーダと無線タグとの通信を傍受することで、無線タグとの距離を算出する。すなわち、第2無線タグリーダは、第1無線タグリーダおよび無線タグがそれぞれ相手に送信する信号を受信(傍受)し、第1無線タグリーダから無線タグに送信された距離測定用コマンドの受信が完了してから、無線タグから第1無線タグリーダに送信された応答信号の受信(傍受)が完了するまでの傍受信号間時間を計測し、その計測した傍受信号間時間と、無線タグが距離測定用コマンドの受信を完了してから応答信号の送信を完了するまでの信号応答完了時間と、第1無線タグリーダと第2無線タグリーダとの距離とに基づいて、第2無線タグリーダと無線タグとの間の距離を算出する。これにより、第2無線タグリーダは、無線タグとの通信を行うことなく、その無線タグとの距離を算出することができる。よって、無線タグの電池消耗を抑制することができる。
【0011】
なお、本発明の無線タグ距離算出システムにおいて、第2無線タグリーダは1台に限られず、複数台あってもよい。第2の無線タグが複数台ある場合には、それら複数台の第2無線タグリーダはいずれも無線タグとの通信を行わずに、その無線タグとの距離を算出する。そのため、第2無線タグリーダが複数台ある場合には、各無線タグリーダがそれぞれ無線タグと通信を行う場合に比較して、無線タグの電池消耗を特に抑制することができる。
【0012】
また、請求項2のように、第1無線タグリーダは、第1距離に関連する第1距離関連値を第2無線タグリーダに送信し、第2無線タグリーダは、その第1距離関連値を受信して、傍受信号間時間、信号応答完了時間に加えて、第1距離関連値を用いて、第2距離を算出することが好ましい。傍受信号間時間、信号応答完了時間に加えて、第1距離関連値を用いることで、第2無線タグリーダは、無線タグとの距離を精度よく算出することができる。
【0013】
なお、第1距離関連値とは、第1距離、または、第1距離を一義的に導くことができる情報であり、後者には、第1距離を電波が伝播する時間、第1時間測定手段が測定した信号送受時間が含まれる。
【0014】
請求項3記載の発明では、第2無線タグリーダは、第1無線タグリーダが送信する距離測定用コマンドまたは無線タグが送信する応答信号を受信してから、所定時間内に、第1距離関連値を受信したか否かを判断し、第2距離算出手段は、第1距離関連値が受信できない場合に、第1距離と第2距離とが等しいと近似して第2距離を算出する。
【0015】
このようにすれば、第2無線タグリーダは、第1無線タグリーダから第1距離関連値が受信できなかったとしても、自身と無線タグとの距離を算出することができる。
【0016】
請求項4の記載の発明では、第1無線タグリーダは第1距離関連値を無線送信し、第2無線タグリーダは、第1無線タグリーダから無線送信された第1距離関連値を受信する。このようにすれば、第1無線タグリーダと第2無線タグリーダとの間を有線で接続しなくても、第1距離関連値を第1無線タグリーダから第2無線タグリーダへ送信することができる。
【0017】
また、請求項5記載の発明では、第1無線タグリーダは、距離測定用コマンドの送信および応答信号の受信を行い、その後、第1時間測定手段により信号送受時間を測定し、第1距離関連値を決定する第1距離関連値決定処理を、予め設定された初期判定回数繰り返す。また、距離計測処理が初期判定回数以上となった場合に、第1距離関連値の誤差が予め設定された許容値以下であるか否かを、第1距離関連値決定処理毎に判定する誤差判定手段をさらに備える。そして、誤差判定手段により、第1距離関連値の誤差が許容値よりも大きいと判定された場合には、第1距離関連値決定処理を再度実行し、誤差判定手段により第1距離関連値の誤差が予め設定された許容値以下であると判定された場合に、第1距離関連値を送信する。
【0018】
第1距離関連値を用いて第2無線タグリーダと無線タグとの距離を算出する場合、第1距離関連値の精度が第2無線タグリーダと無線タグとの距離の精度にも影響する。そこで、このように、第1距離関連値の誤差の大きさを判定して、その誤差が許容値以下となった精度のよい第1距離関連値を第2無線タグリーダへ送信するようにすれば、第2無線タグリーダと無線タグとの間の距離の算出精度が向上する。
【0019】
また、請求項6は、請求項1記載の無線タグ距離算出システムを構成する無線タグリーダである。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態の無線タグ距離算出システムのシステム構成を説明する図である。
【図2】無線タグリーダ1の構成を示すブロック図である。
【図3】無線タグ2の構成を説明するブロック図である。
【図4】無線タグリーダ1A、無線タグリーダ1B、無線タグ2の電波の送受信期間を示す図である。
【図5】無線タグリーダ1Aの動作を示すフローチャートである。
【図6】無線タグ2の動作を示すフローチャートである。
【図7】無線タグリーダ1Bの動作を示すフローチャートである。
【図8】本発明の第2実施形態における無線タグリーダ1Aの動作を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明の第1実施形態の無線タグ距離算出システムのシステム構成を説明する図である。この図1に示すように、本実施形態の無線タグ距離算出システムは、複数台の無線タグリーダ1(ここでは1A、1Bの2台)と、無線タグ2と、コントローラ3とを備えている。
【0022】
無線タグ2は、人が携帯し、あるいは、移動物体に取り付けられて、その位置が変化する。この無線タグ2は、アクティブ型であり、図示しない内部に備えられている電池により動作し、間欠的に通信状態となる。通信状態では、自身のIDを周囲に送信するととともに、無線タグリーダ1からのコマンドを受信することができる。また、コマンドを受信した場合には、そのコマンドに応じた処理を行う。
【0023】
無線タグリーダ1は、2.45GHz、900MHz、433MHz等のRFIDにおいて通常用いられる周波数帯の電波を用いて無線タグ2と通信を行う。また、この無線タグリーダ1は位置が定まっており、また、コントローラ3と有線接続されている。
【0024】
コントローラ3は、コンピュータを備えた構成となっており、複数の無線タグリーダ1を制御する。例えば、コントローラ3は、無線タグリーダ1から送信させる情報を無線タグリーダ1に供給する。また、無線タグリーダ1が受信した情報も取得する。また、コントローラ3は、複数の無線タグリーダ1に対して、無線タグ2との距離を測定させる指示を行う。この指示においては、一つの無線タグリーダ1に対しては、無線タグ2と通信を行ってその無線タグ2との距離を測定する通信測定を指示し、他の無線タグリーダ1に対しては、無線タグ2との通信を行わずに、通信を傍受することにより無線タグ2との距離を測定する傍受測定を指示する。
【0025】
図2は、無線タグリーダ1の構成を示すブロック図である。図2に示すように、無線タグリーダ1は、主制御部11、通信制御部12、時間測定部13、アンテナ14を備えている。
【0026】
主制御部11は、外部へ無線送信させる情報を通信制御部12へ送るとともに、アンテナ14によって受信され通信制御部12によって復調・復号された情報をその通信制御部12から取得する。また、主制御部11は、内部にメモリ11Aとタイマ11Bとを備えている。メモリ11Aには、無線タグ2との間の距離などが記憶される。タイマ11Bは、時間測定部13における時間の計測に用いられる。このタイマ11Bに、たとえば、前述の特許文献2等に記載されている構成、すなわち、多段ゲートで構成され、ゲートの遅延時間から時間を計測する構成のものを用いると、高精度な時間計測が可能となる。
【0027】
通信制御部12は、主制御部11から供給される情報をアンテナ14から外部へ送信させ、また、アンテナ14が受信した電波から、信号を復調・復号して主制御部11へ送る。この通信制御部12は、ベースバンド部121、送信アナログ回路122、復調部123、キャリアセンス部124を備えている。
【0028】
ベースバンド部121は、ベースバンド信号(変調前の信号および復調後の信号)を扱う部分であり、制御部121A、符号部121B、復号部121Cを備えている。制御部121Aは、キャリアセンス部124の制御を行う。無線タグリーダ1が行う無線タグ2との無線通信は、一つの通信チャンネル周波数で通信するように予め設定されている。
キャリアセンス部124は、送信する前に通信チャンネルにて受信電力レベルを検知し、その受信電力レベルが閾値以上ある場合はそのチャンネルでの送信を見合わせ、再度キャリアセンスする。閾値以下であれば、送信可能と判定し送信を開始する。なお、無線タグリーダ1が、無線タグ2と通信を行ってその無線タグ2との距離を測定する通信測定を行う場合、無線タグリーダ1ではキャリアセンスを行った後にコマンドを送信しても良いが、無線タグ2の応答は所定の時間を守るように、キャリアセンスすることなく送信する。
【0029】
符号部121Bは、主制御部11から供給された信号を符号化する。そして、符号化した信号を送信アナログ回路122へ送る。符号化された信号は、送信アナログ回路122にて直ちにアナログ化されてアンテナ14から送信されるので、符号部121Bが送信アナログ回路122へ信号の送信を完了した時点は、電波の送信完了時点とほぼ等しい。また、符号部121Bはデジタル処理部であるので、信号の送信完了時点を正確に判断できる。そこで、符号部121Bは、送信アナログ回路121への信号の送信が完了したら、電波の送信が完了したことを示す信号を時間測定部13へ送る。
【0030】
送信アナログ回路122は、変調部122Aと増幅部122Bとを備えており、変調部122Aは、符号部121Aにて符号化された信号を電気的デジタル信号に変換した後に、予め設定されている通信チャンネルを用いて位相偏移変調や周波数偏移変調等の所定の変調方式により変調する。増幅部122Bは、変調部122Aで変調された信号を増幅する。増幅された信号は、アンテナ14から電波として送信される。
【0031】
また、アンテナ14は、無線タグ2から送信された電波を受信する。受信した電波は復調部123において復調される。復調された信号は復号部121Cにおいて符号化され、符号化された信号が主制御部11に送られる。また、復号部121Cは、デジタル処理部であるので、信号の最終符号を容易に検知することができる。そこで、復号部121Cは、最終符号を検知し、エラーなく受信を完了したら、受信が完了したことを示す信号を時間測定部13へ送る。
【0032】
時間測定部13は、前述の通信測定を行う場合には、無線タグ2に対するタグコマンドの送信完了時点から、無線タグ2からのACK信号(特許請求の範囲の応答信号に相当)の受信完了時点までの時間を、タイマ11Bを利用して計測する。また、この無線リーダ1が傍受測定(無線タグ2との通信を行わず、通信を傍受することにより無線タグ2との距離を測定する)を行うものである場合には、他の無線タグリーダ1がタグコマンドの送信を完了したことを傍受(受信)してから、無線タグ2から受信完了の信号を受信(傍受)するまでの時間を、タイマ11Bを利用して測定する。
【0033】
次に、無線タグ2の構成を説明する。図3は、無線タグ2の構成を説明するブロック図である。図3に示すように、無線タグ2は、主制御部21、通信制御部22、アンテナ24、表示部25、ブザー26、LED27、内蔵電源28を備えている。
【0034】
主制御部21は、通信制御部22、表示部25、ブザー26、LED27や、内蔵するメモリ21Aの制御を行う。
【0035】
通信制御部22は、無線タグリーダ1の通信制御部11が備えているものと同じベースバンド部、アナログ変調回路、復調部等を備えている。これらにより、無線タグリーダ1から送信されアンテナ24により受信された電波から、タグコマンドを復調・復号し、復号したタグコマンドを主制御部21へ出力し、また、主制御部21から送られるACK信号を符号化・変調してアンテナ24から送信する。
【0036】
表示部25、ブザー26、LED27では、コントローラ12から無線タグリーダ1を介して送信されたコマンドに基づいて、文字の表示、音の出力、点灯が行われる。内蔵電源28は、主制御部21、通信制御部22、表示部25、ブザー26、LED27の電力源である。
【0037】
次に、このように構成されたシステムにおいて、無線タグリーダ1A、1Bと無線タグ2との間の距離を測定する方法を説明する。なお、無線タグリーダ1Aは特許請求の範囲の第1無線タグリーダ、無線タグリーダ1Bは特許請求の範囲の第2無線タグリーダとして機能するものとして説明する。また、この説明において、図1に示すように、無線タグリーダ1Aと無線タグ2との間の距離を第1距離D1、無線タグリーダ1Bと無線タグ2との間の距離を第2距離D2、無線タグリーダ1Aと無線タグリーダ1Bとの間の距離を第3距離D3とする。また、無線タグリーダ1Aと無線タグリーダ1Bは位置が定まっていることから、それらの間の第3距離D3は固定である。なお、この第3距離D3は、たとえば、30〜50m程度である。ただし、ショップやラウンジなどの区切りが多い範囲では、10〜20m程度となることもある。一方の距離D1、D2は、通常範囲では50m以内であるが、100m以上離れていても通信できることがある。
【0038】
上記距離D1、D2を測定するのは、無線タグリーダ1A、1Bでもよいし、また、無線タグリーダ1A、1Bから情報を取得して、コントローラ3が距離D1、D2を算出してもよいが、ここでは、無線タグリーダ1A、1Bが距離D1、D2を算出するものとする。また、第3距離D3は予め無線タグリーダ1A、1Bに記憶されている。
【0039】
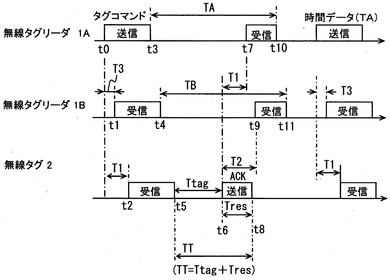
図4は、無線タグリーダ1A、無線タグリーダ1B、無線タグ2の電波の送受信期間を示す図である。この図4に基づいて、無線タグリーダ1A、1Bが無線タグ2との間の距離を測定する方法を説明する。まず、無線タグリーダ1Aと無線タグ2との間の第1距離D1の算出方法について説明する。
【0040】
まず、無線タグリーダ1Aは、無線タグ2に対してタグコマンドを送信する(t0〜t3)。このタグコマンドは、ACKを返す要求と、通信相手となる無線タグ2を特定するIDとを含んでおり、また、タグコマンドの最後には、送信完了を示す信号が含まれている。詳しくは、後述するが、無線タグリーダ1Aは、このタグコマンドを利用して無線タグ2との距離を測定することから、タグコマンドは、特許請求の範囲の距離測定用コマンドに相当する。なお、このタグコマンドを送信するタイミングは、後述するように、無線タグ2からタグIDを受信した後である。
【0041】
無線タグ2は、上記タグコマンドを、その送信開始時点t0、送信終了時点t3から、それぞれ、第1距離D1に応じた第1遅延時間T1だけ遅れたt2〜t5の期間に受信する。また、上記タグコマンドは無線タグ2によって受信されるだけでなく、無線タグリーダ1Bにも受信(傍受)される。無線タグリーダ1Bによってタグコマンドが受信される期間は、タグコマンドの送信開始時点t0、送信終了時点t3から、第3距離D3に応じた第3遅延時間T3だけ遅れたt1〜t4の期間である。
【0042】
無線タグ2は、タグコマンドの受信完了時点(送信完了の信号を受信した時点)から、予め設定された信号処理時間Ttagが経過した後に、予め設定された信号送信時間TresでACKを送信するように設定されている。そのため、図4では、t5時点から信号処理時間Ttagが経過した後のt6時点からACKの送信を開始し、そのt6時点からTres期間後のt8時点に、ACKの送信を終了する。すなわち、無線タグ2は、タグコマンドの受信完了時点t5から、信号処理時間Ttagおよび信号送信時間Tresが経過したt8時点でACKの送信を完了するようになっており、信号処理時間Ttagと信号送信時間Tresの和が信号応答完了時間TTである。なお、前述のタグコマンドと同様に、このACKにも、その最後に送信完了を示す信号が含まれている。
【0043】
無線タグリーダ1Aは、無線タグ2から送信されたACKを、その送信開始時点t6、送信終了時点t8から第1距離D1に応じた第1遅延時間T1だけ遅れたt7〜t10の期間に受信する。また、上記ACKは無線タグリーダ1Aによって受信されるだけでなく、無線タグリーダ1Bにも受信(傍受)される。無線タグリーダ1BによってACKが受信される期間は、ACKの送信開始時点t6、送信終了時点t8から、第2距離D2に応じた第2遅延時間T2だけ遅れたt9〜t11の期間である。
【0044】
無線タグリーダ1A、1B、無線タグ2は、以上のような信号の送受信を行うことから、無線タグリーダ1Aは、タグコマンドの送信を完了したt3時点からACKの受信を完了したt10時点までの時間(以下、信号送受時間という)TAを計測することができる。また、無線タグリーダ1Bは、タグコマンドの受信(傍受)を完了したt4時点からACKの受信(傍受)を完了したt11時点までの時間(以下、傍受信号間時間)TBを計測することができる。
【0045】
なお、無線タグリーダ1Aは、図4に示すように、信号送受時間TAを示す情報をブロードキャスト送信し、無線タグリーダ1Bは、無線タグリーダ1Aが送信した信号送受時間TAの情報を受信する。また、その情報は無線タグ2にも受信される。
【0046】
信号送受時間TAは、図4を参照すると分かるように、t3〜t5(=T1)、t5〜t6(Ttag)、t6〜t7(=T1)、t7〜t10(=tres)に分けられる。また、傍受信号間時間TBは図4を参照すると分かるように、t4〜t5(=T1−T3)、t5〜t6(Ttag)、t6〜t8(Tres)、t8〜t11(=T2)に分けられる。よって、下記式1、2が成り立つ。
(式1) TA=Ttag+Tres+T1+T1=TT+T1+T1
(式2) TB=Ttag+Tres+T1+T2−T3=TT+T1+T2−T3
上記式1を変形すると下記式3が得られ、また、光速をCとすると下記式4が成り立つ。
(式3) T1=(TA−TT)/2
(式4) D1=C/T1
【0047】
上記式3において、前述の通り、TAはt3時点からt10時点までの時間であり、計測可能な時間である。また、TTは、予め記憶されている。よって、無線タグリーダ1Aは、式3からT1を算出することができる。そして、算出したT1を用いて、無線タグリーダ1Aと無線タグ2との第1距離D1を式4から算出することができる。
【0048】
また、上記式2を変形すると下記式5が得られ、また、式6も成り立つ。
(式5) T2=TB−TT+T3−T1
(式6) D2=C/T2
【0049】
上記式5において、前述の通り、TBはt4時点からt11時点までの時間であり、計測可能な時間である。また、TTは、予め記憶されている。また、T3は、第3距離D3が予め記憶されていることから、下記式7から算出することができる。なお、T3は予め記憶しておいてもよい。
(式7) T3=C/D3
【0050】
さらに、T1は、前述の式3から算出することができ、図4において説明したように、無線タグリーダ1Aは信号送受時間TAを無線送信し、無線タグリーダ1Bはその信号送受時間TAを受信している。よって、無線タグリーダ1Bは、式3からT1を算出することができ、さらに、式5からT2を算出することができる。そして、算出したT2を用いると、無線タグリーダ1Bと無線タグ2との第2距離D2を式6から算出することができる。
【0051】
なお、仮に、何らかの理由で、無線タグリーダ1Aから信号送受時間TAが送信されなかった場合、無線タグリーダ1Bは、D1≒D2と近似してD2を算出する。具体的には、式5において、距離D1、D2とそれぞれ1対1の関係にあるT1、T2をT1≒T2とすることで得られる下記式8から、T2の概算値を算出する。そして、このT2の概算値を式6に代入してD2を算出する。
(式8) T2=(TB−TT+T3)/2
【0052】
次に、これまでに説明した無線タグ距離算出システムの処理をフローチャートを用いて説明する。図5は無線タグリーダ1Aの動作を示すフローチャートであり、図6は無線タグ2の動作を示すフローチャートであり、図7は無線タグリーダ1Bの動作を示すフローチャートである。まず、無線タグリーダ1Aの動作を図5を用いて説明する。
【0053】
無線タグリーダ1Aは、図5に示す動作を、コントローラ3からの通信測定の指示を受けた場合に開始する。まず、ステップS1では、タグIDを受信したか否かを判断する。この判断が否定判断である場合には処理を一旦終了する。この場合、所定周期経過後に、再度、図5の処理を最初から実行する。ステップS1が肯定判断の場合には、ステップS2へ進み、受信したIDが距離を測定すべきIDか否かを判断する。この判断は、具体的には、受信したIDに対して、まだ距離を算出していないかどうか、および、距離を算出してからの経過時間が基準時間を超えているか否かを判断するものである。
【0054】
ステップS2の判断が否定判断である場合にも図8の処理を一旦終了する。一方、ステップS2の判断が肯定判断となった場合には、ステップS3へ進み、タグコマンドを送信する処理を行う。このタグコマンドは、ACKを返すことを要求するコマンドと、通信相手となる無線タグ2を特定するIDとを含んでいる。また、タグコマンドには、送信元となる無線タグリーダ1AのIDも含まれている。
【0055】
続くステップS4では、無線タグ2からACKが返って来るまでの時間を計測するために、内部タイマをリセットする。続くステップS5では受信処理を行う。この受信処理は、アンテナ14によって受信された電波を復調部123で復調し、復号部121Cで復号し、復号した符号を主制御部11が取得する処理である。
【0056】
続くステップS6では、上記ステップS5での受信処理の結果に基づいて、ACKを受信したか否かを判断する。より正確には、ACKの受信が完了したか否かを、ACKの送信完了を示す符号を検知したか否かにより判断する。この判断が否定判断となった場合には、ステップS5の受信処理を繰り返す。一方、肯定判断となった場合にはステップS7へ進み、内部タイマを停止させる。この時点で停止させられた内部タイマが計測した時間は、図4のTAに相当する。よって、ステップS2からステップS4までの処理が特許請求の範囲の第1時間測定手段に相当する。
【0057】
続くステップS8では、内部タイマによって測定した信号送受時間TAをブロードキャスト送信する。続くステップS9では距離算出処理を行う。この距離算出処理は、内部タイマによって測定した信号送受時間TAを前述の式3に代入することで、無線タグリーダ1Aと無線タグ2との第1距離D1を算出する処理である。よって、ステップS9は特許請求の範囲の第1距離算出手段に相当する。この処理を行った後は、所定周期経過後にステップS1以下を再度実行する。
【0058】
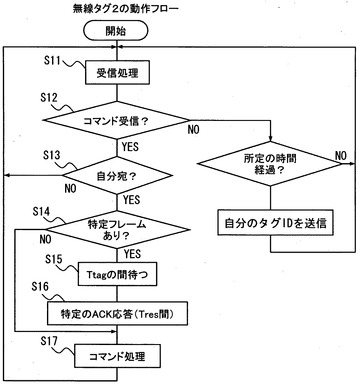
次に、無線タグ2の動作を図6を用いて説明する。無線タグ2は、図6に示す処理を逐次繰り返している。まず、ステップS11では受信処理を行う。この受信処理は、図5のステップS5と同様の処理である。続くステップS12では、コマンドを受信したか否かを判断する。この判断が否定判断となった場合には、ステップS18に進み、所定の時間経過するまでステップS11の受信処理を繰り返すとともに、所定の時間が経過したら、ステップS19にて、記憶しているタグIDを送信する。一方、ステップS12で肯定判断となった場合にはステップS13へ進む。
【0059】
ステップS13では、受信したタグコマンドが自分宛か否かを、タグコマンドに含まれているIDに基づいて判断する。この判断が否定判断となった場合にもステップS11へ戻る。一方、ステップS13も肯定判断となった場合、ステップS14へ進み、受信したコマンドに特定フレームが含まれているか否かを判断する。この特定フレームとは、ACKをTres期間という一定期間で送信することを要求するフレームである。
【0060】
このステップS14の判断が否定判断である場合には、ステップS17へ進み、受信したコマンドに従って処理を行う。一方、ステップS14が肯定判断である場合には、ステップS15に進み、コマンドの受信を完了してから時間Ttagが経過するまで待つ。なお、コマンドの受信完了は、コマンドに含まれる送信完了を示す符号を検知することにより判断する。
【0061】
続くステップS16では、特定のACK応答、すなわち、予め定められたTres期間でACK応答を送信する処理を行う。このステップS16を実行後は、ステップS14が否定判断となった場合と同様に、ステップS17へ進み、受信したコマンドに従って処理を行う。
【0062】
次に、無線タグリーダ1Bの動作を図7を用いて説明する。無線タグリーダ1Bは、図7に示す動作を、コントローラ3からの傍受測定の指示を受けた場合に開始する。なお、コントローラ3からは、上記指示とともに、無線タグ2のIDおよびその無線タグ2と通信を行う無線タグリーダのIDも送信される。
【0063】
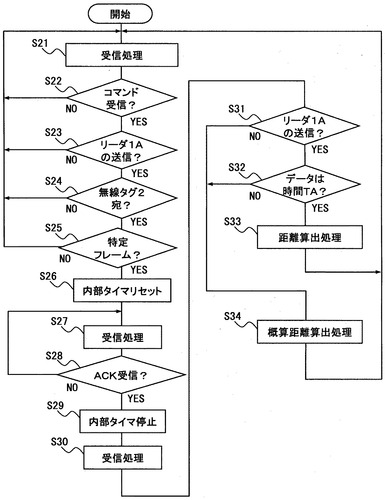
まず、ステップS21では受信処理を行う。この受信処理の内容は図5のステップS5と同じである。続くステップS22では、コマンドを受信したか否かを判断する。正確には、コマンドの送信完了を示す符号を検知したか否かを判断する。この判断が否定判断である場合にはステップS21へ戻る。一方、肯定判断である場合には、ステップS23へ進み、受信したコマンドが無線タグリーダ1Aが送信したものであるか否かを、受信したコマンドに含まれている送信元を示すIDに基づいて判断する。この判断が否定判断である場合にも、ステップS21へ戻る。
【0064】
一方、ステップS23の判断も肯定判断となった場合、ステップS24へ進み、受信したコマンドが無線タグ2宛であるか否かを、通信相手を示すIDに基づいて判断する。このステップS24の判断が否定判断である場合にも、ステップS21へ戻る。ステップS24の判断が肯定判断である場合には、ステップS25へ進み、受信したコマンドに特定フレームが含まれているか否かをさらに判断する。この特定フレームは、図6のステップS14と同じ意味である。
【0065】
ステップS25の判断が否定判断である場合にもステップS21へ戻る。一方、ステップS25も肯定判断となった場合には、ステップS26へ進んで、内部タイマをリセットする。その後、ステップS27へ進み、受信処理を行う。この受信処理は、ステップS21と同様の処理である。
【0066】
続くステップS28では、上記ステップS27での受信処理の結果に基づいて、ACKを受信したか否かを判断する。より正確には、ACKの受信が完了したか否かを、ACKの送信完了を示す符号を検知したか否かにより判断する。この判断が否定判断である場合には、ステップS27へ戻る。一方、肯定判断である場合には、ステップS29へ進み、内部タイマを停止させる。この時点で停止させられた内部タイマが計測した時間は、図4のTBに相当する。よって、ステップS26からステップS29までの処理が特許請求の範囲の第2時間測定手段に相当する。
【0067】
その後、ステップS30へ進み、再び受信処理を行う。ここでの受信処理は、予め設定された一定期間行う。その後、ステップ31へ進む。ステップS31では、ステップS30の受信処理の結果として受信した信号が、無線タグリーダ1Aからの信号であるか否かを判断する。この判断が否定判断である場合にはステップS34へ進む。一方、ステップS31が肯定判断である場合には、ステプS32へ進む。ステップS32では、受信したデータが信号送受時間TAを示すものであるか否かを判断する。この判断が否定判断である場合にもステップS34へ進む。
【0068】
一方、ステップS32も肯定判断である場合には、特許請求の範囲の第2距離算出手段に相当するステップS33へ進み、距離T2の算出処理を行う。ここでの距離算出処理は、具体的には、まず、無線タグリーダ1Aから受信した信号送受時間TA、および、予め記憶しているTTを前述の式3に代入することにより時間T1を算出する。次に、算出したT1、内部タイマによって計測した傍受信号間時間TB、および、予め記憶しているTT、T3を前述の式5に代入することにより時間T2を算出する。そして、算出した時間T2および予め記憶している光速Cを式6に代入することにより、第2距離D2を算出する処理である。このステップS33を終了後は、ステップS21へ戻る。
【0069】
一方、ステップS31の判断またはステップS32の判断が否定判断である場合、すなわち、無線タグリーダ1Aから信号送受時間TAを受信できなかった場合には、ステップS34において概算距離算出処理を行う。この概算距離算出処理は、T1≒T2とするものであり、内部タイマによって計測した傍受信号間時間TB、および、予め記憶しているTT、T3を前述の式8に代入することにより時間T2を算出し、算出した時間T2および予め記憶している光速Cを式6に代入することにより、第2距離D2を算出する処理である。ステップS34を終了後もステップS21へ戻る。
【0070】
以上、説明した第1実施形態によれば、無線タグリーダ1Aは、無線タグ2と通信を行って信号送受時間TAから無線タグ2との第1距離D1を算出するが、無線タグリーダ1Bは、無線タグリーダ1Aと無線タグ2との通信を傍受することで、無線タグ2との第2距離D2を算出する。すなわち、無線タグリーダ1Bは、無線タグリーダ1Aおよび無線タグ2がそれぞれ相手に送信する信号を傍受し、無線タグリーダ1Aから無線タグ2に送信されたタグコマンドの受信(傍受)が完了してから、無線タグ2から無線タグリーダ1Aに送信されたACKの受信(傍受)が完了するまでの傍受信号間時間TBを計測し、その計測した傍受信号間時間TBと、予め記憶している無線タグ2の信号応答完了時間TTと、無線タグリーダ1Aと無線タグリーダ1Bとの第3距離D3、さらに、無線タグリーダ1Aから送信される第1距離D1とを用いて、無線タグリーダ1Bと無線タグ2との間の第2距離D2を算出する。これにより、無線タグリーダ1Bは、無線タグ2の通信を行うことなく、無線タグ2との第2距離D2を算出することができる。よって、無線タグ2の電池消耗を抑制することができる。
【0071】
また、この第1実施形態によれば、無線タグリーダ1Aから信号送受時間TAを受信することができない場合には、D1≒D2と近似することで、信号送受時間TAを用いることなく第2距離D2を算出するので、信号送受時間TAを受信することができなくても、第2距離D2を算出することができる。
【0072】
次に、本発明の第2実施形態を説明する。第2実施形態は、無線タグリーダ1Aが、前述した図5に代えて、図8の処理を実行する点が第1実施形態と異なるのみである。
【0073】
図8において、まず、ステップS41では、タグIDを受信したか否かを判断する。この判断が否定判断である場合には処理を一旦終了する。この場合、所定周期経過後に、再度、図8の処理を最初から実行する。ステップS41が肯定判断の場合には、ステップS42へ進み、図5のステップS2と同様に、受信したIDが距離を測定すべきIDか否かを判断する。この判断が否定判断である場合にも図8の処理を一旦終了する。一方、肯定判断である場合にはステップS43へ進む。
【0074】
続くステップS43では、距離計測処理を実行する。この距離計測処理は、前述した図5のステップS3〜S9の処理であり、第1距離D1を算出する。また、この距離計測処理は、特許請求の範囲の第1距離関連値決定処理に相当する。続くステップS44では、上記ステップS43の処理で算出した第1距離D1を保存する。そして、続くステップS45では、第1距離D1の算出が初期判定回数として設定された3回完了したか否かを判断する。この判断が否定判断である場合にはステップS43へ戻り、距離計測処理を再び行う。
【0075】
一方、ステップS45が肯定判断となった場合にはステップS46へ進む。ステップS46では、保存した3回分の第1距離D1のうち、最大値と最小値との差を距離誤差として算出する。
【0076】
続くステップS47は特許請求の範囲の誤差判定手段に相当し、ステップS46が算出した距離誤差が予め設定した許容値以下であるか否かを判断する。この判断が肯定判断の場合には、ステップS48へ進み、3回分保存されている第1距離D1から、最終的な第1距離D1を決定する。この最終的な第1距離D1は、たとえば、3回分の平均でもよいし、或いは、3回の中央値でもよい。また、3回のうちの最新値でもよい。
【0077】
そして、続くステップS49では、上記ステップS48で決定した第1距離D1に対応する信号送受時間TAを算出し、この算出した信号送受時間TAをブロードキャスト送信する。信号送受時間TAが無線送信されると、無線タグリーダ1Bは、この信号送受時間TAを受信し、受信した信号送受時間TAを用いて第2距離D2を算出する。
【0078】
ステップS47が否定判断の場合はステップS50へ進む。ステップS50では、予め設定された測定制限回数に到達したか否かを判断する。この判断が肯定判断である場合には、この図8に示す処理を終了する。従って、ステップS50が否定判断となった場合には、無線タグリーダ1Aは信号送受時間TAを送信しないことになる。この場合、無線タグリーダ1Bは信号送受時間TAを受信できないことから、図7のステップS34の概算距離算出処理を実行して概算値の第2距離D2を算出する。
【0079】
ステップS50が否定判断である場合にはステップS51へ進む。ステップS51では、ステップS43と同じ距離計測処理を実行して第1距離D1を算出する。続くステップS52では、直前のステップS51で算出した第1距離D1を新算出値として保存する。
【0080】
そして、ステップS53では、新算出値が、保存している3回分の第1距離D1の最小値から最大値によって定まる範囲内であるか否かを判断する。この判断が否定判断である場合には、前述のステップS50に戻る。
【0081】
ステップS53が肯定判断である場合には、ステップS54へ進み、最大値−新算出値が、新算出値−最小値よりも小さいか否かを判断する。この判断は、最大値、最小値にうち、より距離誤差(=最大値−最小値)が小さくなる側と新算出値を置き換えるための判断である。この判断が肯定判断の場合にはステップS55に進み、新算出値を新たな最小値とする。一方、否定判断の場合にはステップS56に進み、新算出値を新たな最大値とする。これらステップS55またはS56を実行した後は、ステップS46以下を繰り返し実行する。この繰り返しにより、距離誤差が許容値以下となるか、測定制限回数に到達するまで、第1距離D1の計測が繰り返されることになる。
【0082】
以上、説明した第2実施形態によれば、第1実施形態と同様の効果が得られることに加えて、ステップS46において第1距離の誤差の大きさを判定し、その誤差が許容値以下となった精度のよい第1距離D1に対応する信号送受時間TAを無線タグリーダ1Bへ送信している。そのため、無線タグリーダ1Bは、この信号送受時間TAを利用した第2距離D2の算出精度が向上する。
【0083】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0084】
たとえば、前述の実施形態では、無線タグリーダ1Aは、信号送受時間TAをブロードキャスト送信していたが、通信相手の無線タグリーダ1Bを指定して信号送受時間TAを送信してもよい。また、無線タグリーダ1Aと無線タグリーダ1Bとの間を有線接続接続して、有線にて信号送受時間TAを送信していもよい。
【0085】
また、前述の実施形態では、無線タグリーダ1Aは、信号送受時間TAを送信していたが、これに代えて、第1距離D1、第1遅延時間T1を送信するようにしてもよい。また、前述の実施形態では、無線タグリーダ1Bは、信号応答完了時間TTを記憶していたが、前述したように信号応答完了時間TTは信号処理時間Ttagと信号送信時間Tresの和であることから、信号応答完了時間TTを直接は記憶せず、これらと信号処理時間Ttagと信号送信時間Tresをそれぞれ記憶することにより、実質的に信号応答完了時間TTを記憶するようにしてもよい。
【符号の説明】
【0086】
1:無線タグリーダ、 2:無線タグ、 3:コントローラ、 11:主制御部、 11A:メモリ、 11B:タイマ、 12:通信制御部、 121:ベースバンド部、 121A:符号部、 121B:復号部、 121C:制御部、 122:送信アナログ回路、 122A:変調部、 122B:増幅部、 123:復調部、 124:キャリアセンス部、 13:時間測定部、 14:アンテナ、 21:主制御部、 22:通信制御部、 24:アンテナ、 25:表示部、 26:ブザー、 27:LED、 28:内蔵電源
【技術分野】
【0001】
本発明は、無線タグリーダが無線タグまでの距離を算出する無線タグ距離算出システムおよびこのシステムを構成する無線タグリーダに関し、特に、無線タグリーダを複数備えた無線タグ距離算出システムおよびこのシステムを構成する無線タグリーダに関する。
【背景技術】
【0002】
電波の伝播時間を用いて距離を測定する方法が種々知られている。たとえば、特許文献1では、2つの無線局間の距離を測定するのにフレーム同期パターンを使用しており、第1の無線局は、フレーム同期パターンを送信してから、第2の無線局からのフレーム同期パターンを受信するまでの時間を計測し、この時間から距離を算出している。
【0003】
また、特許文献2には、実際の通信規格において、電波の伝播時間を用いて距離を計測する方法を適用した場合の詳細が記述されている。この特許文献2では、測定側から被測定側に電波を送信し、被測定側から測定側へ返信をさせている。そして、測定側では、自分が信号を送出し終わってから被測定側からの信号を受信し終わるまでの時間を計測している。この計測した時間と、信号送信時間と、信号返信の処理時間とから、距離による遅延時間を求め、この遅延時間から距離を求めている。
【0004】
また、特許文献3では、基地局間での距離測定を、複数の基地局間で行うことにより、各基地局の位置を測定することが記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平1−235884号公報
【特許文献2】特開2008−232828号公報
【特許文献3】特開2004−85545号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
人や移動物体が無線タグを持つことで、無線タグを持っている人・移動物体を特定し、特定の無線タグとの間で通信を行ないたい場合が考えられる。たとえば、空港では、空港の各所に無線タグリーダを配置するとともに、搭乗予定客に表示機能付き無線タグを持ってもらい、無線タグと無線タグリーダとが通信を行って、搭乗予定客がどこにいるかをリアルタイムで把握することが考えられる。搭乗予定客がどこにいるかをリアルタイムで把握することができれば、搭乗時刻・ゲートの変更連絡や、搭乗時刻に遅れそうな客が持っている無線タグに対して案内情報を送信することや、その客を探すことなどが可能となる。
【0007】
ここで、無線タグリーダは、無線タグからの電波強度をもとに無線タグとの距離を算出することも考えられる。しかし、電波強度は、反射の影響によって近い距離でも弱くなったり、逆に、遠い距離でも強くなったりする。従って、電波強度を用いると、距離算出精度が十分ではない。そこで、特許文献1〜3に記載されているように、無線機同士が通信して距離を算出する技術を用いることが考えられる。
【0008】
しかし、同じ無線タグに対する距離を複数の無線タグリーダが測定したい場合において、特許文献1〜3のように無線機同士が通信することで距離を計算する方法を適用すると、無線タグは複数の無線タグリーダとそれぞれ通信しなければならない。その結果、無線タグの電池消耗が激しくなり、実用的な電池寿命が得られないおそれもある。
【0009】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、無線タグの電池消耗を抑制しつつ、複数の無線タグリーダが無線タグとの間の距離をそれぞれ算出することができる無線タグ距離算出システム、および、そのシステムを構成する無線タグリーダを提供することにある。
【課題を解決するための手段】
【0010】
その目的を達成するための請求項1記載の発明によれば、第1無線タグリーダは、無線タグと通信を行って信号送受時間から無線タグとの距離を算出するが、第2無線タグリーダは、第1無線タグリーダと無線タグとの通信を傍受することで、無線タグとの距離を算出する。すなわち、第2無線タグリーダは、第1無線タグリーダおよび無線タグがそれぞれ相手に送信する信号を受信(傍受)し、第1無線タグリーダから無線タグに送信された距離測定用コマンドの受信が完了してから、無線タグから第1無線タグリーダに送信された応答信号の受信(傍受)が完了するまでの傍受信号間時間を計測し、その計測した傍受信号間時間と、無線タグが距離測定用コマンドの受信を完了してから応答信号の送信を完了するまでの信号応答完了時間と、第1無線タグリーダと第2無線タグリーダとの距離とに基づいて、第2無線タグリーダと無線タグとの間の距離を算出する。これにより、第2無線タグリーダは、無線タグとの通信を行うことなく、その無線タグとの距離を算出することができる。よって、無線タグの電池消耗を抑制することができる。
【0011】
なお、本発明の無線タグ距離算出システムにおいて、第2無線タグリーダは1台に限られず、複数台あってもよい。第2の無線タグが複数台ある場合には、それら複数台の第2無線タグリーダはいずれも無線タグとの通信を行わずに、その無線タグとの距離を算出する。そのため、第2無線タグリーダが複数台ある場合には、各無線タグリーダがそれぞれ無線タグと通信を行う場合に比較して、無線タグの電池消耗を特に抑制することができる。
【0012】
また、請求項2のように、第1無線タグリーダは、第1距離に関連する第1距離関連値を第2無線タグリーダに送信し、第2無線タグリーダは、その第1距離関連値を受信して、傍受信号間時間、信号応答完了時間に加えて、第1距離関連値を用いて、第2距離を算出することが好ましい。傍受信号間時間、信号応答完了時間に加えて、第1距離関連値を用いることで、第2無線タグリーダは、無線タグとの距離を精度よく算出することができる。
【0013】
なお、第1距離関連値とは、第1距離、または、第1距離を一義的に導くことができる情報であり、後者には、第1距離を電波が伝播する時間、第1時間測定手段が測定した信号送受時間が含まれる。
【0014】
請求項3記載の発明では、第2無線タグリーダは、第1無線タグリーダが送信する距離測定用コマンドまたは無線タグが送信する応答信号を受信してから、所定時間内に、第1距離関連値を受信したか否かを判断し、第2距離算出手段は、第1距離関連値が受信できない場合に、第1距離と第2距離とが等しいと近似して第2距離を算出する。
【0015】
このようにすれば、第2無線タグリーダは、第1無線タグリーダから第1距離関連値が受信できなかったとしても、自身と無線タグとの距離を算出することができる。
【0016】
請求項4の記載の発明では、第1無線タグリーダは第1距離関連値を無線送信し、第2無線タグリーダは、第1無線タグリーダから無線送信された第1距離関連値を受信する。このようにすれば、第1無線タグリーダと第2無線タグリーダとの間を有線で接続しなくても、第1距離関連値を第1無線タグリーダから第2無線タグリーダへ送信することができる。
【0017】
また、請求項5記載の発明では、第1無線タグリーダは、距離測定用コマンドの送信および応答信号の受信を行い、その後、第1時間測定手段により信号送受時間を測定し、第1距離関連値を決定する第1距離関連値決定処理を、予め設定された初期判定回数繰り返す。また、距離計測処理が初期判定回数以上となった場合に、第1距離関連値の誤差が予め設定された許容値以下であるか否かを、第1距離関連値決定処理毎に判定する誤差判定手段をさらに備える。そして、誤差判定手段により、第1距離関連値の誤差が許容値よりも大きいと判定された場合には、第1距離関連値決定処理を再度実行し、誤差判定手段により第1距離関連値の誤差が予め設定された許容値以下であると判定された場合に、第1距離関連値を送信する。
【0018】
第1距離関連値を用いて第2無線タグリーダと無線タグとの距離を算出する場合、第1距離関連値の精度が第2無線タグリーダと無線タグとの距離の精度にも影響する。そこで、このように、第1距離関連値の誤差の大きさを判定して、その誤差が許容値以下となった精度のよい第1距離関連値を第2無線タグリーダへ送信するようにすれば、第2無線タグリーダと無線タグとの間の距離の算出精度が向上する。
【0019】
また、請求項6は、請求項1記載の無線タグ距離算出システムを構成する無線タグリーダである。
【図面の簡単な説明】
【0020】
【図1】本発明の第1実施形態の無線タグ距離算出システムのシステム構成を説明する図である。
【図2】無線タグリーダ1の構成を示すブロック図である。
【図3】無線タグ2の構成を説明するブロック図である。
【図4】無線タグリーダ1A、無線タグリーダ1B、無線タグ2の電波の送受信期間を示す図である。
【図5】無線タグリーダ1Aの動作を示すフローチャートである。
【図6】無線タグ2の動作を示すフローチャートである。
【図7】無線タグリーダ1Bの動作を示すフローチャートである。
【図8】本発明の第2実施形態における無線タグリーダ1Aの動作を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明の実施形態を図面に基づいて説明する。図1は、本発明の第1実施形態の無線タグ距離算出システムのシステム構成を説明する図である。この図1に示すように、本実施形態の無線タグ距離算出システムは、複数台の無線タグリーダ1(ここでは1A、1Bの2台)と、無線タグ2と、コントローラ3とを備えている。
【0022】
無線タグ2は、人が携帯し、あるいは、移動物体に取り付けられて、その位置が変化する。この無線タグ2は、アクティブ型であり、図示しない内部に備えられている電池により動作し、間欠的に通信状態となる。通信状態では、自身のIDを周囲に送信するととともに、無線タグリーダ1からのコマンドを受信することができる。また、コマンドを受信した場合には、そのコマンドに応じた処理を行う。
【0023】
無線タグリーダ1は、2.45GHz、900MHz、433MHz等のRFIDにおいて通常用いられる周波数帯の電波を用いて無線タグ2と通信を行う。また、この無線タグリーダ1は位置が定まっており、また、コントローラ3と有線接続されている。
【0024】
コントローラ3は、コンピュータを備えた構成となっており、複数の無線タグリーダ1を制御する。例えば、コントローラ3は、無線タグリーダ1から送信させる情報を無線タグリーダ1に供給する。また、無線タグリーダ1が受信した情報も取得する。また、コントローラ3は、複数の無線タグリーダ1に対して、無線タグ2との距離を測定させる指示を行う。この指示においては、一つの無線タグリーダ1に対しては、無線タグ2と通信を行ってその無線タグ2との距離を測定する通信測定を指示し、他の無線タグリーダ1に対しては、無線タグ2との通信を行わずに、通信を傍受することにより無線タグ2との距離を測定する傍受測定を指示する。
【0025】
図2は、無線タグリーダ1の構成を示すブロック図である。図2に示すように、無線タグリーダ1は、主制御部11、通信制御部12、時間測定部13、アンテナ14を備えている。
【0026】
主制御部11は、外部へ無線送信させる情報を通信制御部12へ送るとともに、アンテナ14によって受信され通信制御部12によって復調・復号された情報をその通信制御部12から取得する。また、主制御部11は、内部にメモリ11Aとタイマ11Bとを備えている。メモリ11Aには、無線タグ2との間の距離などが記憶される。タイマ11Bは、時間測定部13における時間の計測に用いられる。このタイマ11Bに、たとえば、前述の特許文献2等に記載されている構成、すなわち、多段ゲートで構成され、ゲートの遅延時間から時間を計測する構成のものを用いると、高精度な時間計測が可能となる。
【0027】
通信制御部12は、主制御部11から供給される情報をアンテナ14から外部へ送信させ、また、アンテナ14が受信した電波から、信号を復調・復号して主制御部11へ送る。この通信制御部12は、ベースバンド部121、送信アナログ回路122、復調部123、キャリアセンス部124を備えている。
【0028】
ベースバンド部121は、ベースバンド信号(変調前の信号および復調後の信号)を扱う部分であり、制御部121A、符号部121B、復号部121Cを備えている。制御部121Aは、キャリアセンス部124の制御を行う。無線タグリーダ1が行う無線タグ2との無線通信は、一つの通信チャンネル周波数で通信するように予め設定されている。
キャリアセンス部124は、送信する前に通信チャンネルにて受信電力レベルを検知し、その受信電力レベルが閾値以上ある場合はそのチャンネルでの送信を見合わせ、再度キャリアセンスする。閾値以下であれば、送信可能と判定し送信を開始する。なお、無線タグリーダ1が、無線タグ2と通信を行ってその無線タグ2との距離を測定する通信測定を行う場合、無線タグリーダ1ではキャリアセンスを行った後にコマンドを送信しても良いが、無線タグ2の応答は所定の時間を守るように、キャリアセンスすることなく送信する。
【0029】
符号部121Bは、主制御部11から供給された信号を符号化する。そして、符号化した信号を送信アナログ回路122へ送る。符号化された信号は、送信アナログ回路122にて直ちにアナログ化されてアンテナ14から送信されるので、符号部121Bが送信アナログ回路122へ信号の送信を完了した時点は、電波の送信完了時点とほぼ等しい。また、符号部121Bはデジタル処理部であるので、信号の送信完了時点を正確に判断できる。そこで、符号部121Bは、送信アナログ回路121への信号の送信が完了したら、電波の送信が完了したことを示す信号を時間測定部13へ送る。
【0030】
送信アナログ回路122は、変調部122Aと増幅部122Bとを備えており、変調部122Aは、符号部121Aにて符号化された信号を電気的デジタル信号に変換した後に、予め設定されている通信チャンネルを用いて位相偏移変調や周波数偏移変調等の所定の変調方式により変調する。増幅部122Bは、変調部122Aで変調された信号を増幅する。増幅された信号は、アンテナ14から電波として送信される。
【0031】
また、アンテナ14は、無線タグ2から送信された電波を受信する。受信した電波は復調部123において復調される。復調された信号は復号部121Cにおいて符号化され、符号化された信号が主制御部11に送られる。また、復号部121Cは、デジタル処理部であるので、信号の最終符号を容易に検知することができる。そこで、復号部121Cは、最終符号を検知し、エラーなく受信を完了したら、受信が完了したことを示す信号を時間測定部13へ送る。
【0032】
時間測定部13は、前述の通信測定を行う場合には、無線タグ2に対するタグコマンドの送信完了時点から、無線タグ2からのACK信号(特許請求の範囲の応答信号に相当)の受信完了時点までの時間を、タイマ11Bを利用して計測する。また、この無線リーダ1が傍受測定(無線タグ2との通信を行わず、通信を傍受することにより無線タグ2との距離を測定する)を行うものである場合には、他の無線タグリーダ1がタグコマンドの送信を完了したことを傍受(受信)してから、無線タグ2から受信完了の信号を受信(傍受)するまでの時間を、タイマ11Bを利用して測定する。
【0033】
次に、無線タグ2の構成を説明する。図3は、無線タグ2の構成を説明するブロック図である。図3に示すように、無線タグ2は、主制御部21、通信制御部22、アンテナ24、表示部25、ブザー26、LED27、内蔵電源28を備えている。
【0034】
主制御部21は、通信制御部22、表示部25、ブザー26、LED27や、内蔵するメモリ21Aの制御を行う。
【0035】
通信制御部22は、無線タグリーダ1の通信制御部11が備えているものと同じベースバンド部、アナログ変調回路、復調部等を備えている。これらにより、無線タグリーダ1から送信されアンテナ24により受信された電波から、タグコマンドを復調・復号し、復号したタグコマンドを主制御部21へ出力し、また、主制御部21から送られるACK信号を符号化・変調してアンテナ24から送信する。
【0036】
表示部25、ブザー26、LED27では、コントローラ12から無線タグリーダ1を介して送信されたコマンドに基づいて、文字の表示、音の出力、点灯が行われる。内蔵電源28は、主制御部21、通信制御部22、表示部25、ブザー26、LED27の電力源である。
【0037】
次に、このように構成されたシステムにおいて、無線タグリーダ1A、1Bと無線タグ2との間の距離を測定する方法を説明する。なお、無線タグリーダ1Aは特許請求の範囲の第1無線タグリーダ、無線タグリーダ1Bは特許請求の範囲の第2無線タグリーダとして機能するものとして説明する。また、この説明において、図1に示すように、無線タグリーダ1Aと無線タグ2との間の距離を第1距離D1、無線タグリーダ1Bと無線タグ2との間の距離を第2距離D2、無線タグリーダ1Aと無線タグリーダ1Bとの間の距離を第3距離D3とする。また、無線タグリーダ1Aと無線タグリーダ1Bは位置が定まっていることから、それらの間の第3距離D3は固定である。なお、この第3距離D3は、たとえば、30〜50m程度である。ただし、ショップやラウンジなどの区切りが多い範囲では、10〜20m程度となることもある。一方の距離D1、D2は、通常範囲では50m以内であるが、100m以上離れていても通信できることがある。
【0038】
上記距離D1、D2を測定するのは、無線タグリーダ1A、1Bでもよいし、また、無線タグリーダ1A、1Bから情報を取得して、コントローラ3が距離D1、D2を算出してもよいが、ここでは、無線タグリーダ1A、1Bが距離D1、D2を算出するものとする。また、第3距離D3は予め無線タグリーダ1A、1Bに記憶されている。
【0039】
図4は、無線タグリーダ1A、無線タグリーダ1B、無線タグ2の電波の送受信期間を示す図である。この図4に基づいて、無線タグリーダ1A、1Bが無線タグ2との間の距離を測定する方法を説明する。まず、無線タグリーダ1Aと無線タグ2との間の第1距離D1の算出方法について説明する。
【0040】
まず、無線タグリーダ1Aは、無線タグ2に対してタグコマンドを送信する(t0〜t3)。このタグコマンドは、ACKを返す要求と、通信相手となる無線タグ2を特定するIDとを含んでおり、また、タグコマンドの最後には、送信完了を示す信号が含まれている。詳しくは、後述するが、無線タグリーダ1Aは、このタグコマンドを利用して無線タグ2との距離を測定することから、タグコマンドは、特許請求の範囲の距離測定用コマンドに相当する。なお、このタグコマンドを送信するタイミングは、後述するように、無線タグ2からタグIDを受信した後である。
【0041】
無線タグ2は、上記タグコマンドを、その送信開始時点t0、送信終了時点t3から、それぞれ、第1距離D1に応じた第1遅延時間T1だけ遅れたt2〜t5の期間に受信する。また、上記タグコマンドは無線タグ2によって受信されるだけでなく、無線タグリーダ1Bにも受信(傍受)される。無線タグリーダ1Bによってタグコマンドが受信される期間は、タグコマンドの送信開始時点t0、送信終了時点t3から、第3距離D3に応じた第3遅延時間T3だけ遅れたt1〜t4の期間である。
【0042】
無線タグ2は、タグコマンドの受信完了時点(送信完了の信号を受信した時点)から、予め設定された信号処理時間Ttagが経過した後に、予め設定された信号送信時間TresでACKを送信するように設定されている。そのため、図4では、t5時点から信号処理時間Ttagが経過した後のt6時点からACKの送信を開始し、そのt6時点からTres期間後のt8時点に、ACKの送信を終了する。すなわち、無線タグ2は、タグコマンドの受信完了時点t5から、信号処理時間Ttagおよび信号送信時間Tresが経過したt8時点でACKの送信を完了するようになっており、信号処理時間Ttagと信号送信時間Tresの和が信号応答完了時間TTである。なお、前述のタグコマンドと同様に、このACKにも、その最後に送信完了を示す信号が含まれている。
【0043】
無線タグリーダ1Aは、無線タグ2から送信されたACKを、その送信開始時点t6、送信終了時点t8から第1距離D1に応じた第1遅延時間T1だけ遅れたt7〜t10の期間に受信する。また、上記ACKは無線タグリーダ1Aによって受信されるだけでなく、無線タグリーダ1Bにも受信(傍受)される。無線タグリーダ1BによってACKが受信される期間は、ACKの送信開始時点t6、送信終了時点t8から、第2距離D2に応じた第2遅延時間T2だけ遅れたt9〜t11の期間である。
【0044】
無線タグリーダ1A、1B、無線タグ2は、以上のような信号の送受信を行うことから、無線タグリーダ1Aは、タグコマンドの送信を完了したt3時点からACKの受信を完了したt10時点までの時間(以下、信号送受時間という)TAを計測することができる。また、無線タグリーダ1Bは、タグコマンドの受信(傍受)を完了したt4時点からACKの受信(傍受)を完了したt11時点までの時間(以下、傍受信号間時間)TBを計測することができる。
【0045】
なお、無線タグリーダ1Aは、図4に示すように、信号送受時間TAを示す情報をブロードキャスト送信し、無線タグリーダ1Bは、無線タグリーダ1Aが送信した信号送受時間TAの情報を受信する。また、その情報は無線タグ2にも受信される。
【0046】
信号送受時間TAは、図4を参照すると分かるように、t3〜t5(=T1)、t5〜t6(Ttag)、t6〜t7(=T1)、t7〜t10(=tres)に分けられる。また、傍受信号間時間TBは図4を参照すると分かるように、t4〜t5(=T1−T3)、t5〜t6(Ttag)、t6〜t8(Tres)、t8〜t11(=T2)に分けられる。よって、下記式1、2が成り立つ。
(式1) TA=Ttag+Tres+T1+T1=TT+T1+T1
(式2) TB=Ttag+Tres+T1+T2−T3=TT+T1+T2−T3
上記式1を変形すると下記式3が得られ、また、光速をCとすると下記式4が成り立つ。
(式3) T1=(TA−TT)/2
(式4) D1=C/T1
【0047】
上記式3において、前述の通り、TAはt3時点からt10時点までの時間であり、計測可能な時間である。また、TTは、予め記憶されている。よって、無線タグリーダ1Aは、式3からT1を算出することができる。そして、算出したT1を用いて、無線タグリーダ1Aと無線タグ2との第1距離D1を式4から算出することができる。
【0048】
また、上記式2を変形すると下記式5が得られ、また、式6も成り立つ。
(式5) T2=TB−TT+T3−T1
(式6) D2=C/T2
【0049】
上記式5において、前述の通り、TBはt4時点からt11時点までの時間であり、計測可能な時間である。また、TTは、予め記憶されている。また、T3は、第3距離D3が予め記憶されていることから、下記式7から算出することができる。なお、T3は予め記憶しておいてもよい。
(式7) T3=C/D3
【0050】
さらに、T1は、前述の式3から算出することができ、図4において説明したように、無線タグリーダ1Aは信号送受時間TAを無線送信し、無線タグリーダ1Bはその信号送受時間TAを受信している。よって、無線タグリーダ1Bは、式3からT1を算出することができ、さらに、式5からT2を算出することができる。そして、算出したT2を用いると、無線タグリーダ1Bと無線タグ2との第2距離D2を式6から算出することができる。
【0051】
なお、仮に、何らかの理由で、無線タグリーダ1Aから信号送受時間TAが送信されなかった場合、無線タグリーダ1Bは、D1≒D2と近似してD2を算出する。具体的には、式5において、距離D1、D2とそれぞれ1対1の関係にあるT1、T2をT1≒T2とすることで得られる下記式8から、T2の概算値を算出する。そして、このT2の概算値を式6に代入してD2を算出する。
(式8) T2=(TB−TT+T3)/2
【0052】
次に、これまでに説明した無線タグ距離算出システムの処理をフローチャートを用いて説明する。図5は無線タグリーダ1Aの動作を示すフローチャートであり、図6は無線タグ2の動作を示すフローチャートであり、図7は無線タグリーダ1Bの動作を示すフローチャートである。まず、無線タグリーダ1Aの動作を図5を用いて説明する。
【0053】
無線タグリーダ1Aは、図5に示す動作を、コントローラ3からの通信測定の指示を受けた場合に開始する。まず、ステップS1では、タグIDを受信したか否かを判断する。この判断が否定判断である場合には処理を一旦終了する。この場合、所定周期経過後に、再度、図5の処理を最初から実行する。ステップS1が肯定判断の場合には、ステップS2へ進み、受信したIDが距離を測定すべきIDか否かを判断する。この判断は、具体的には、受信したIDに対して、まだ距離を算出していないかどうか、および、距離を算出してからの経過時間が基準時間を超えているか否かを判断するものである。
【0054】
ステップS2の判断が否定判断である場合にも図8の処理を一旦終了する。一方、ステップS2の判断が肯定判断となった場合には、ステップS3へ進み、タグコマンドを送信する処理を行う。このタグコマンドは、ACKを返すことを要求するコマンドと、通信相手となる無線タグ2を特定するIDとを含んでいる。また、タグコマンドには、送信元となる無線タグリーダ1AのIDも含まれている。
【0055】
続くステップS4では、無線タグ2からACKが返って来るまでの時間を計測するために、内部タイマをリセットする。続くステップS5では受信処理を行う。この受信処理は、アンテナ14によって受信された電波を復調部123で復調し、復号部121Cで復号し、復号した符号を主制御部11が取得する処理である。
【0056】
続くステップS6では、上記ステップS5での受信処理の結果に基づいて、ACKを受信したか否かを判断する。より正確には、ACKの受信が完了したか否かを、ACKの送信完了を示す符号を検知したか否かにより判断する。この判断が否定判断となった場合には、ステップS5の受信処理を繰り返す。一方、肯定判断となった場合にはステップS7へ進み、内部タイマを停止させる。この時点で停止させられた内部タイマが計測した時間は、図4のTAに相当する。よって、ステップS2からステップS4までの処理が特許請求の範囲の第1時間測定手段に相当する。
【0057】
続くステップS8では、内部タイマによって測定した信号送受時間TAをブロードキャスト送信する。続くステップS9では距離算出処理を行う。この距離算出処理は、内部タイマによって測定した信号送受時間TAを前述の式3に代入することで、無線タグリーダ1Aと無線タグ2との第1距離D1を算出する処理である。よって、ステップS9は特許請求の範囲の第1距離算出手段に相当する。この処理を行った後は、所定周期経過後にステップS1以下を再度実行する。
【0058】
次に、無線タグ2の動作を図6を用いて説明する。無線タグ2は、図6に示す処理を逐次繰り返している。まず、ステップS11では受信処理を行う。この受信処理は、図5のステップS5と同様の処理である。続くステップS12では、コマンドを受信したか否かを判断する。この判断が否定判断となった場合には、ステップS18に進み、所定の時間経過するまでステップS11の受信処理を繰り返すとともに、所定の時間が経過したら、ステップS19にて、記憶しているタグIDを送信する。一方、ステップS12で肯定判断となった場合にはステップS13へ進む。
【0059】
ステップS13では、受信したタグコマンドが自分宛か否かを、タグコマンドに含まれているIDに基づいて判断する。この判断が否定判断となった場合にもステップS11へ戻る。一方、ステップS13も肯定判断となった場合、ステップS14へ進み、受信したコマンドに特定フレームが含まれているか否かを判断する。この特定フレームとは、ACKをTres期間という一定期間で送信することを要求するフレームである。
【0060】
このステップS14の判断が否定判断である場合には、ステップS17へ進み、受信したコマンドに従って処理を行う。一方、ステップS14が肯定判断である場合には、ステップS15に進み、コマンドの受信を完了してから時間Ttagが経過するまで待つ。なお、コマンドの受信完了は、コマンドに含まれる送信完了を示す符号を検知することにより判断する。
【0061】
続くステップS16では、特定のACK応答、すなわち、予め定められたTres期間でACK応答を送信する処理を行う。このステップS16を実行後は、ステップS14が否定判断となった場合と同様に、ステップS17へ進み、受信したコマンドに従って処理を行う。
【0062】
次に、無線タグリーダ1Bの動作を図7を用いて説明する。無線タグリーダ1Bは、図7に示す動作を、コントローラ3からの傍受測定の指示を受けた場合に開始する。なお、コントローラ3からは、上記指示とともに、無線タグ2のIDおよびその無線タグ2と通信を行う無線タグリーダのIDも送信される。
【0063】
まず、ステップS21では受信処理を行う。この受信処理の内容は図5のステップS5と同じである。続くステップS22では、コマンドを受信したか否かを判断する。正確には、コマンドの送信完了を示す符号を検知したか否かを判断する。この判断が否定判断である場合にはステップS21へ戻る。一方、肯定判断である場合には、ステップS23へ進み、受信したコマンドが無線タグリーダ1Aが送信したものであるか否かを、受信したコマンドに含まれている送信元を示すIDに基づいて判断する。この判断が否定判断である場合にも、ステップS21へ戻る。
【0064】
一方、ステップS23の判断も肯定判断となった場合、ステップS24へ進み、受信したコマンドが無線タグ2宛であるか否かを、通信相手を示すIDに基づいて判断する。このステップS24の判断が否定判断である場合にも、ステップS21へ戻る。ステップS24の判断が肯定判断である場合には、ステップS25へ進み、受信したコマンドに特定フレームが含まれているか否かをさらに判断する。この特定フレームは、図6のステップS14と同じ意味である。
【0065】
ステップS25の判断が否定判断である場合にもステップS21へ戻る。一方、ステップS25も肯定判断となった場合には、ステップS26へ進んで、内部タイマをリセットする。その後、ステップS27へ進み、受信処理を行う。この受信処理は、ステップS21と同様の処理である。
【0066】
続くステップS28では、上記ステップS27での受信処理の結果に基づいて、ACKを受信したか否かを判断する。より正確には、ACKの受信が完了したか否かを、ACKの送信完了を示す符号を検知したか否かにより判断する。この判断が否定判断である場合には、ステップS27へ戻る。一方、肯定判断である場合には、ステップS29へ進み、内部タイマを停止させる。この時点で停止させられた内部タイマが計測した時間は、図4のTBに相当する。よって、ステップS26からステップS29までの処理が特許請求の範囲の第2時間測定手段に相当する。
【0067】
その後、ステップS30へ進み、再び受信処理を行う。ここでの受信処理は、予め設定された一定期間行う。その後、ステップ31へ進む。ステップS31では、ステップS30の受信処理の結果として受信した信号が、無線タグリーダ1Aからの信号であるか否かを判断する。この判断が否定判断である場合にはステップS34へ進む。一方、ステップS31が肯定判断である場合には、ステプS32へ進む。ステップS32では、受信したデータが信号送受時間TAを示すものであるか否かを判断する。この判断が否定判断である場合にもステップS34へ進む。
【0068】
一方、ステップS32も肯定判断である場合には、特許請求の範囲の第2距離算出手段に相当するステップS33へ進み、距離T2の算出処理を行う。ここでの距離算出処理は、具体的には、まず、無線タグリーダ1Aから受信した信号送受時間TA、および、予め記憶しているTTを前述の式3に代入することにより時間T1を算出する。次に、算出したT1、内部タイマによって計測した傍受信号間時間TB、および、予め記憶しているTT、T3を前述の式5に代入することにより時間T2を算出する。そして、算出した時間T2および予め記憶している光速Cを式6に代入することにより、第2距離D2を算出する処理である。このステップS33を終了後は、ステップS21へ戻る。
【0069】
一方、ステップS31の判断またはステップS32の判断が否定判断である場合、すなわち、無線タグリーダ1Aから信号送受時間TAを受信できなかった場合には、ステップS34において概算距離算出処理を行う。この概算距離算出処理は、T1≒T2とするものであり、内部タイマによって計測した傍受信号間時間TB、および、予め記憶しているTT、T3を前述の式8に代入することにより時間T2を算出し、算出した時間T2および予め記憶している光速Cを式6に代入することにより、第2距離D2を算出する処理である。ステップS34を終了後もステップS21へ戻る。
【0070】
以上、説明した第1実施形態によれば、無線タグリーダ1Aは、無線タグ2と通信を行って信号送受時間TAから無線タグ2との第1距離D1を算出するが、無線タグリーダ1Bは、無線タグリーダ1Aと無線タグ2との通信を傍受することで、無線タグ2との第2距離D2を算出する。すなわち、無線タグリーダ1Bは、無線タグリーダ1Aおよび無線タグ2がそれぞれ相手に送信する信号を傍受し、無線タグリーダ1Aから無線タグ2に送信されたタグコマンドの受信(傍受)が完了してから、無線タグ2から無線タグリーダ1Aに送信されたACKの受信(傍受)が完了するまでの傍受信号間時間TBを計測し、その計測した傍受信号間時間TBと、予め記憶している無線タグ2の信号応答完了時間TTと、無線タグリーダ1Aと無線タグリーダ1Bとの第3距離D3、さらに、無線タグリーダ1Aから送信される第1距離D1とを用いて、無線タグリーダ1Bと無線タグ2との間の第2距離D2を算出する。これにより、無線タグリーダ1Bは、無線タグ2の通信を行うことなく、無線タグ2との第2距離D2を算出することができる。よって、無線タグ2の電池消耗を抑制することができる。
【0071】
また、この第1実施形態によれば、無線タグリーダ1Aから信号送受時間TAを受信することができない場合には、D1≒D2と近似することで、信号送受時間TAを用いることなく第2距離D2を算出するので、信号送受時間TAを受信することができなくても、第2距離D2を算出することができる。
【0072】
次に、本発明の第2実施形態を説明する。第2実施形態は、無線タグリーダ1Aが、前述した図5に代えて、図8の処理を実行する点が第1実施形態と異なるのみである。
【0073】
図8において、まず、ステップS41では、タグIDを受信したか否かを判断する。この判断が否定判断である場合には処理を一旦終了する。この場合、所定周期経過後に、再度、図8の処理を最初から実行する。ステップS41が肯定判断の場合には、ステップS42へ進み、図5のステップS2と同様に、受信したIDが距離を測定すべきIDか否かを判断する。この判断が否定判断である場合にも図8の処理を一旦終了する。一方、肯定判断である場合にはステップS43へ進む。
【0074】
続くステップS43では、距離計測処理を実行する。この距離計測処理は、前述した図5のステップS3〜S9の処理であり、第1距離D1を算出する。また、この距離計測処理は、特許請求の範囲の第1距離関連値決定処理に相当する。続くステップS44では、上記ステップS43の処理で算出した第1距離D1を保存する。そして、続くステップS45では、第1距離D1の算出が初期判定回数として設定された3回完了したか否かを判断する。この判断が否定判断である場合にはステップS43へ戻り、距離計測処理を再び行う。
【0075】
一方、ステップS45が肯定判断となった場合にはステップS46へ進む。ステップS46では、保存した3回分の第1距離D1のうち、最大値と最小値との差を距離誤差として算出する。
【0076】
続くステップS47は特許請求の範囲の誤差判定手段に相当し、ステップS46が算出した距離誤差が予め設定した許容値以下であるか否かを判断する。この判断が肯定判断の場合には、ステップS48へ進み、3回分保存されている第1距離D1から、最終的な第1距離D1を決定する。この最終的な第1距離D1は、たとえば、3回分の平均でもよいし、或いは、3回の中央値でもよい。また、3回のうちの最新値でもよい。
【0077】
そして、続くステップS49では、上記ステップS48で決定した第1距離D1に対応する信号送受時間TAを算出し、この算出した信号送受時間TAをブロードキャスト送信する。信号送受時間TAが無線送信されると、無線タグリーダ1Bは、この信号送受時間TAを受信し、受信した信号送受時間TAを用いて第2距離D2を算出する。
【0078】
ステップS47が否定判断の場合はステップS50へ進む。ステップS50では、予め設定された測定制限回数に到達したか否かを判断する。この判断が肯定判断である場合には、この図8に示す処理を終了する。従って、ステップS50が否定判断となった場合には、無線タグリーダ1Aは信号送受時間TAを送信しないことになる。この場合、無線タグリーダ1Bは信号送受時間TAを受信できないことから、図7のステップS34の概算距離算出処理を実行して概算値の第2距離D2を算出する。
【0079】
ステップS50が否定判断である場合にはステップS51へ進む。ステップS51では、ステップS43と同じ距離計測処理を実行して第1距離D1を算出する。続くステップS52では、直前のステップS51で算出した第1距離D1を新算出値として保存する。
【0080】
そして、ステップS53では、新算出値が、保存している3回分の第1距離D1の最小値から最大値によって定まる範囲内であるか否かを判断する。この判断が否定判断である場合には、前述のステップS50に戻る。
【0081】
ステップS53が肯定判断である場合には、ステップS54へ進み、最大値−新算出値が、新算出値−最小値よりも小さいか否かを判断する。この判断は、最大値、最小値にうち、より距離誤差(=最大値−最小値)が小さくなる側と新算出値を置き換えるための判断である。この判断が肯定判断の場合にはステップS55に進み、新算出値を新たな最小値とする。一方、否定判断の場合にはステップS56に進み、新算出値を新たな最大値とする。これらステップS55またはS56を実行した後は、ステップS46以下を繰り返し実行する。この繰り返しにより、距離誤差が許容値以下となるか、測定制限回数に到達するまで、第1距離D1の計測が繰り返されることになる。
【0082】
以上、説明した第2実施形態によれば、第1実施形態と同様の効果が得られることに加えて、ステップS46において第1距離の誤差の大きさを判定し、その誤差が許容値以下となった精度のよい第1距離D1に対応する信号送受時間TAを無線タグリーダ1Bへ送信している。そのため、無線タグリーダ1Bは、この信号送受時間TAを利用した第2距離D2の算出精度が向上する。
【0083】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0084】
たとえば、前述の実施形態では、無線タグリーダ1Aは、信号送受時間TAをブロードキャスト送信していたが、通信相手の無線タグリーダ1Bを指定して信号送受時間TAを送信してもよい。また、無線タグリーダ1Aと無線タグリーダ1Bとの間を有線接続接続して、有線にて信号送受時間TAを送信していもよい。
【0085】
また、前述の実施形態では、無線タグリーダ1Aは、信号送受時間TAを送信していたが、これに代えて、第1距離D1、第1遅延時間T1を送信するようにしてもよい。また、前述の実施形態では、無線タグリーダ1Bは、信号応答完了時間TTを記憶していたが、前述したように信号応答完了時間TTは信号処理時間Ttagと信号送信時間Tresの和であることから、信号応答完了時間TTを直接は記憶せず、これらと信号処理時間Ttagと信号送信時間Tresをそれぞれ記憶することにより、実質的に信号応答完了時間TTを記憶するようにしてもよい。
【符号の説明】
【0086】
1:無線タグリーダ、 2:無線タグ、 3:コントローラ、 11:主制御部、 11A:メモリ、 11B:タイマ、 12:通信制御部、 121:ベースバンド部、 121A:符号部、 121B:復号部、 121C:制御部、 122:送信アナログ回路、 122A:変調部、 122B:増幅部、 123:復調部、 124:キャリアセンス部、 13:時間測定部、 14:アンテナ、 21:主制御部、 22:通信制御部、 24:アンテナ、 25:表示部、 26:ブザー、 27:LED、 28:内蔵電源
【特許請求の範囲】
【請求項1】
無線タグと、その無線タグとの間で通信を行う第1無線タグリーダおよび第2無線タグリーダとを備え、前記第1無線タグリーダと前記無線タグとの間の距離および前記第2無線タグリーダと前記無線タグとの間の距離をそれぞれ算出する無線タグ距離算出システムであって、
前記第1無線タグリーダは、前記無線タグに対して距離測定用コマンドを送信するとともに、その距離測定用コマンドに応答して前記無線タグから送信された応答信号を受信し、
前記無線タグは、前記距離測定用コマンドを受信し、受信完了時点から予め設定された信号応答完了時間で前記応答信号の送信を完了し、
前記第2無線タグリーダは、前記第1無線タグリーダが送信した距離測定用コマンドを受信するとともに、前記無線タグが送信した応答信号を受信し、
さらに、前記第1無線タグリーダは、
前記距離測定用コマンドの送信を完了してから前記応答信号の受信が完了するまでの信号送受時間を測定する第1時間測定手段と、
その第1時間測定手段が測定した信号送受時間から、第1無線タグリーダと無線タグとの第1距離を算出する第1距離算出手段とを有し、
前記第2無線タグリーダは、
前記距離測定用コマンドの受信を完了してから前記応答信号の受信が完了するまでの傍受信号間時間を測定する第2時間測定手段と、
その第2時間測定手段が測定した傍受信号間時間と、予め記憶している前記無線タグの信号応答完了時間と、第1無線タグリーダと第2無線タグリーダとの距離とから、第2無線タグリーダと無線タグとの第2距離を算出する第2距離算出手段とを有する
ことを特徴とする無線タグ距離算出システム。
【請求項2】
請求項1において、
前記第1無線タグリーダは、前記第1距離算出手段が算出した第1距離に関連する第1距離関連値を前記第2無線タグリーダに送信し、
前記第2無線タグリーダは、
前記第1距離関連値を受信し、
前記第2距離算出手段は、前記傍受信号間時間、信号応答完了時間に加えて、前記第1距離関連値を用いて、前記第2距離を算出することを特徴とする無線タグ距離算出システム。
【請求項3】
請求項2において、
前記第2無線タグリーダは、前記第1無線タグリーダが送信する距離測定用コマンドまたは前記無線タグが送信する応答信号を受信してから、所定時間内に、前記第1距離関連値を受信したか否かを判断し、
前記第2距離算出手段は、前記第1距離関連値が受信できない場合に、前記第1距離と前記第2距離とが等しいと近似して前記第2距離を算出することを特徴とする無線タグ距離算出システム。
【請求項4】
請求項2または3において、
前記第1無線タグリーダは前記第1距離関連値を無線送信し、
前記第2無線タグリーダは、前記第1無線タグリーダから無線送信された第1距離関連値を受信することを特徴とする無線タグ距離算出システム。
【請求項5】
請求項2〜4のいずれか1項において、
第1無線タグリーダは、前記距離測定用コマンドの送信および前記応答信号の受信を行い、その後、前記第1時間測定手段により前記信号送受時間を測定し、前記第1距離関連値を決定する第1距離関連値決定処理を、予め設定された初期判定回数繰り返し、
前記第1距離関連値決定処理が前記初期判定回数を以上となった場合には、前記第1距離関連値の誤差が予め設定された許容値以下であるか否かを、第1距離関連値決定処理毎に判定する誤差判定手段をさらに備え、
前記誤差判定手段により、前記第1距離関連値の誤差が許容値よりも大きいと判定された場合には、前記第1距離関連値決定処理を再度実行し、前記誤差判定手段により前記第1距離関連値の誤差が予め設定された許容値以下であると判定された場合に、前記第1距離関連値を送信することを特徴とする無線タグ距離算出システム。
【請求項6】
無線タグとの間の距離を算出する無線タグリーダであって、
他の無線タグリーダが前記無線タグに対して送信する距離測定用コマンド、および、その距離測定用コマンドに応答して前記無線タグが前記他の無線タグリーダに送信した応答信号を受信し、
前記距離測定用コマンドの受信を完了してから、前記応答信号の受信が完了するまでの傍受信号間時間を測定する時間測定手段と、
その時間測定手段が測定した傍受信号間時間と、予め記憶している前記無線タグの信号応答完了時間と、前記他の無線タグリーダと自身との距離とから、自身と無線タグとの距離を算出する距離算出手段とを有することを特徴とする無線タグリーダ。
【請求項1】
無線タグと、その無線タグとの間で通信を行う第1無線タグリーダおよび第2無線タグリーダとを備え、前記第1無線タグリーダと前記無線タグとの間の距離および前記第2無線タグリーダと前記無線タグとの間の距離をそれぞれ算出する無線タグ距離算出システムであって、
前記第1無線タグリーダは、前記無線タグに対して距離測定用コマンドを送信するとともに、その距離測定用コマンドに応答して前記無線タグから送信された応答信号を受信し、
前記無線タグは、前記距離測定用コマンドを受信し、受信完了時点から予め設定された信号応答完了時間で前記応答信号の送信を完了し、
前記第2無線タグリーダは、前記第1無線タグリーダが送信した距離測定用コマンドを受信するとともに、前記無線タグが送信した応答信号を受信し、
さらに、前記第1無線タグリーダは、
前記距離測定用コマンドの送信を完了してから前記応答信号の受信が完了するまでの信号送受時間を測定する第1時間測定手段と、
その第1時間測定手段が測定した信号送受時間から、第1無線タグリーダと無線タグとの第1距離を算出する第1距離算出手段とを有し、
前記第2無線タグリーダは、
前記距離測定用コマンドの受信を完了してから前記応答信号の受信が完了するまでの傍受信号間時間を測定する第2時間測定手段と、
その第2時間測定手段が測定した傍受信号間時間と、予め記憶している前記無線タグの信号応答完了時間と、第1無線タグリーダと第2無線タグリーダとの距離とから、第2無線タグリーダと無線タグとの第2距離を算出する第2距離算出手段とを有する
ことを特徴とする無線タグ距離算出システム。
【請求項2】
請求項1において、
前記第1無線タグリーダは、前記第1距離算出手段が算出した第1距離に関連する第1距離関連値を前記第2無線タグリーダに送信し、
前記第2無線タグリーダは、
前記第1距離関連値を受信し、
前記第2距離算出手段は、前記傍受信号間時間、信号応答完了時間に加えて、前記第1距離関連値を用いて、前記第2距離を算出することを特徴とする無線タグ距離算出システム。
【請求項3】
請求項2において、
前記第2無線タグリーダは、前記第1無線タグリーダが送信する距離測定用コマンドまたは前記無線タグが送信する応答信号を受信してから、所定時間内に、前記第1距離関連値を受信したか否かを判断し、
前記第2距離算出手段は、前記第1距離関連値が受信できない場合に、前記第1距離と前記第2距離とが等しいと近似して前記第2距離を算出することを特徴とする無線タグ距離算出システム。
【請求項4】
請求項2または3において、
前記第1無線タグリーダは前記第1距離関連値を無線送信し、
前記第2無線タグリーダは、前記第1無線タグリーダから無線送信された第1距離関連値を受信することを特徴とする無線タグ距離算出システム。
【請求項5】
請求項2〜4のいずれか1項において、
第1無線タグリーダは、前記距離測定用コマンドの送信および前記応答信号の受信を行い、その後、前記第1時間測定手段により前記信号送受時間を測定し、前記第1距離関連値を決定する第1距離関連値決定処理を、予め設定された初期判定回数繰り返し、
前記第1距離関連値決定処理が前記初期判定回数を以上となった場合には、前記第1距離関連値の誤差が予め設定された許容値以下であるか否かを、第1距離関連値決定処理毎に判定する誤差判定手段をさらに備え、
前記誤差判定手段により、前記第1距離関連値の誤差が許容値よりも大きいと判定された場合には、前記第1距離関連値決定処理を再度実行し、前記誤差判定手段により前記第1距離関連値の誤差が予め設定された許容値以下であると判定された場合に、前記第1距離関連値を送信することを特徴とする無線タグ距離算出システム。
【請求項6】
無線タグとの間の距離を算出する無線タグリーダであって、
他の無線タグリーダが前記無線タグに対して送信する距離測定用コマンド、および、その距離測定用コマンドに応答して前記無線タグが前記他の無線タグリーダに送信した応答信号を受信し、
前記距離測定用コマンドの受信を完了してから、前記応答信号の受信が完了するまでの傍受信号間時間を測定する時間測定手段と、
その時間測定手段が測定した傍受信号間時間と、予め記憶している前記無線タグの信号応答完了時間と、前記他の無線タグリーダと自身との距離とから、自身と無線タグとの距離を算出する距離算出手段とを有することを特徴とする無線タグリーダ。
【図1】


【図2】

【図3】

【図4】
【図5】

【図6】
【図7】
【図8】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−88125(P2012−88125A)
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願番号】特願2010−233985(P2010−233985)
【出願日】平成22年10月18日(2010.10.18)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
【公開日】平成24年5月10日(2012.5.10)
【国際特許分類】
【出願日】平成22年10月18日(2010.10.18)
【出願人】(501428545)株式会社デンソーウェーブ (1,155)
【Fターム(参考)】
[ Back to top ]