
無線ネットワークでの位置検出
第1のノードAが第1のメッセージを第2のノードBに送信する。第2のノードBは第2のメッセージを第1のノードに送信する。第1のメッセージの送信開始から第2のメッセージの受信開始までの第1経過時間が測定される。第1のメッセージの受信開始から第2のメッセージの送信開始までの第2経過時間が測定される。第2のノードBは第2経過時間を含む第3のメッセージを第1ノードAに送信する。第1のノードAと第2のノードBとの間の距離は、第1経過時間と、第2経過時間と、第2のメッセージに含まれるカウント校正乗数または第3のメッセージに含まれるカウント校正乗数とに基づいて演算される。ノードは無線メッシュネットワーク内を移動してもよい。ノードの位置情報及び当該ノードから近隣のノードまでの距離が測定され、ネットワークマネージャに送信されて蓄積される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、概して無線ネットワークでの位置検出に係り、より詳しくは工業環境に設けられた無線メッシュネットワークでの位置検出に関する。
【背景技術】
【0002】
無線技術では、技術の組み合わせにより、低電力のマイクロプロセッサ、集積回路、測定技術、及び制御技術が進歩し、エネルギーの貯蔵により、低コスト、低電力装置の開発が可能となった。プロセスオートメーションへの適用における信頼性、レイテンシー、リアルタイム性、及び性能要件を満たすことができるようにすると共に、利用可能な資源に対する実用上の限界を考慮してセンサネットワーク内に無線装置を一緒に組み入れることは、困難な課題である。無線信号強度はやがて変動し、無線ノードは行ったり来たりする。種々の経路でデータが動的に送信され、バッテリが有するエネルギは有限である。これらの要求を満たすために、装置及びネットワークそのものによって通知される情報を用いて、ネットワーク管理技術により全体的なネットワークトポロジを形成可能でなければならず、レイテンシー、電力、及びスループットに関し、ネットワーク全体をスケジュールして最適化する必要がある。
【0003】
レイテンシーを管理すると共に、電力を浪費しないことが、今日無線センサネットワークが直面している課題である。レイテンシーを最小限に抑えるために、パケットが送信元から宛先に至る途中で遅延しないように通信手段が構築される必要がある。工業環境では、大抵数年間となるような長期にわたり、多くの場合は無人環境で低電力ノードを稼働させる必要がある。エネルギーを最小限に抑えるため、装置は可能な限り低電力の状態に維持しなければならない。
【0004】
センサネットワークにおいて標準的な通信距離の場合、無線チャネルで情報に耳を傾けることは、データ伝送とほぼ同じ電力量を消費することになる。さらに、アイドル状態にある装置のエネルギー消費量は、受信状態にある装置のエネルギー消費量とほぼ同じである。結果として、節電する最も効果的な方法は、無線通信及び装置自体の作動をアイドル時に停止することである。装置を停止するには、装置がアイドル状態になる時間及び電力供給を再び行うべき時間について事前に認識する必要がある。WirelessHART(登録商標)等、いくつかの工業用センサネットワークプロトコルで用いられる手法は、いつ装置を起動し、いついくつかの機能を実行し、いつスリープ状態に戻すべきかについての認識を有した装置を構成するものである。このような構成は、ネットワークマネージャによって実行され、タイムスケジューリングと称されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
この問題に取り組むための1つのアプローチは、WirelessHARTによって利用される時分割多元接続(TDMA)等の時刻同期した無線技術を使用することである。WirelessHARTは、パケット基盤によるパケットでチャンネルホッピングする直接拡散方式(DSSS)の無線通信と互換性のあるIEEE802.15.4を利用する2.4GHzのISMバンドで作動する安全なネットワーク技術である。
【0006】
装置及びアプリケーションが規定する通信要求と組み合わせてネットワーク全体のルーティング情報を使用する集中型ネットワークマネージャによって、スケジューリングが実行される。スケジュールはスロットに細分化され、ネットワークマネージャから各装置に伝送される。装置には、各装置が送信要求または受信要求を有するスロットが提供されるだけである。ネットワークマネージャはネットワークグラフとネットワークスケジュールとを常に適合させ、ネットワークトポロジや通信要求を変更する。
【0007】
また、ネットワークマネージャはネットワーク通信パラメータ値を初期化して維持管理している。ネットワークマネージャは、ネットワークへの接続及び切断のほか、専用ネットワークリソース及び共用ネットワークリソースの管理のための仕組みも提供している。さらに、ネットワークマネージャは、ネットワーク全体の健全性についての診断情報を収集及び維持管理し、ホストベースのアプリケーションに通知する任務を負う。
【0008】
工業センサネットワークでの望ましい特徴は、工場建屋にいる人々や資産を探知できることであり、さらにその後で侵入者を検知できることである。位置検出を実行する従来の方法では、位置検出を実行して通知するための別個の基本設備に加え、種々のセンサ、ビーコン、及び検出器の設置を必要としていた。これらのシステムは多くの場合、別個に実行するには費用がかかりすぎ、位置情報を含まないセンサネットワークシステムとなっている。既存の無線センサネットワークインフラを使用して位置検出する方法が必要とされている。
【課題を解決するための手段】
【0009】
本発明の一態様は、第1のノードによって第1カウント校正乗数を測定し、第2のノードによって第2カウント校正乗数を測定するステップを有している。メッセージが前記第1のノードによって送信され、前記第2のノードによって受信される。第2のメッセージが前記第2のノードによって送信され、前記第1のノードによって受信される。第1のメッセージの送信開始から前記第2のメッセージの受信開始までの第1経過時間が測定される。前記第1メッセージの受信開始から前記第2メッセージの送信開始までの第2経過時間も測定される。第3のメッセージが前記第2経過時間を含み、前記第2のノードによって送信され、前記第1のノードによって受信される。前記第2カウント校正乗数は、前記第2のメッセージ及び前記第3のメッセージのいずれかを含む。そして、前記第1経過時間及び前記第2経過時間並びに前記第1カウント校正乗数及び前記第2カウント校正乗数に基づいて、前記第1のノードと前記第2のノードとの間の距離が求められる。
【0010】
本発明の別の態様では、無線メッシュネットワーク内のノードの位置探索の方法が示される。無線メッシュネットワーク内の2つ以上の位置にノードが配置される。それぞれの位置に関して、前記ノードの位置情報が測定される。前記無線メッシュネットワークに配置された別のノードからの距離が測定され、前記ノードの位置情報がネットワークマネージャに送信される。前記ネットワークマネージャは、各位置に関して、距離と位置情報とを蓄積する。
【図面の簡単な説明】
【0011】
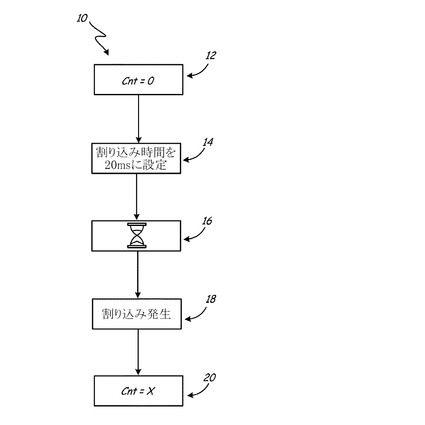
【図1】カウント校正乗数を測定する方法を示すフローチャートである。
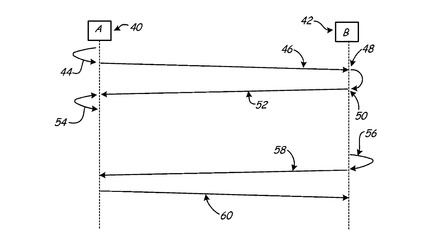
【図2】飛行時間の計算を示すタイミング図である。
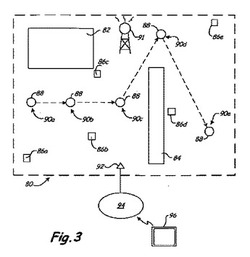
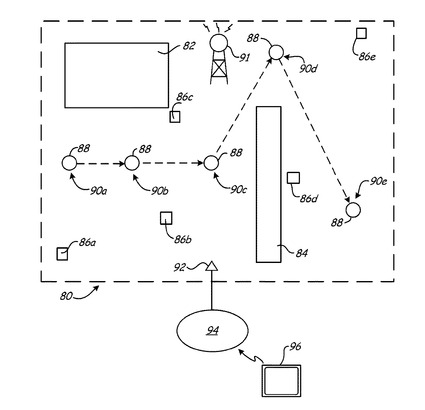
【図3】無線メッシュネットワークでの代表的なノードの配置を示す空間図である。
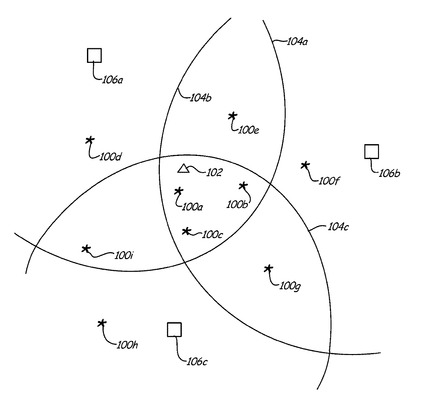
【図4】もう1つ別のノードがある可能性のある位置範囲を狭めるのに使用可能な近隣ノードまでの距離測定を示す図である。
【発明を実施するための形態】
【0012】
工業センサネットワーク、特にWirelessHART等、時刻同期した無線メッシュネットワークを利用する工業センサネットワークは、工場建屋にいる人々や資産を探知可能な位置検出に使用することができる。より高度な設備では、侵入者の探知も可能となる。
【0013】
ネットワーク内の各デバイスが機能強化され、絶対位置情報または相対位置情報を備えると共に、三角測量、マッピング、または他の数学的手法に基づいて位置を計算するアルゴリズムを備える。ロケータービーコンなどの専門化したデバイスは、ネットワーク内にあるハンドヘルドデバイス等のモバイルノードと、位置を識別するために人員に取り付けられた位置センサとによってネットワーク内で使用される周期的なビーコンを放射する。これらのノードは、工場建屋のフィールドデバイスやビーコンデバイスといった、無線メッシュネットワーク内に設置されている別のノードとの通信に基づいて位置を測定するアルゴリズムを備えることができる。さらに、それらのノードはフィールドデバイスやビーコンデバイスに絶対的中間点または相対的中間点を介装させることが可能である。ハンドヘルド等のデバイスは、工場建屋の周りを移動して、ノードを探索する精度を向上させる相対的中間点情報を組み入れる付加機能を有する。相対的中間点情報はネットワークマネージャ等のホストコンピュータにある、製造設備の地図を備えた中枢アプリケーションにフィードバック可能である。そして、無線メッシュネットワーク内を移動する資産や人員の位置が、中枢アプリケーションにおいて、これらの情報を使用して特定される。
【0014】
(時間調整フィールド)
メッセージが2つのモジュール間で送信される場合に飛行時間測定法(a time of flight measurement)を、2つのノード間の距離を測定するために構築し使用可能である。距離測定の精度は、時間測定の精度に直接関係する。無線メッシュネットワークでは、1つのノードが送信してもう1つのノードが受信する。無線リンクの他に、2つのノード間を接続するものはない。各ノードは時間の検知機能を自ら有している。グローバルクロックをタイムスタンプメッセージに使用可能だが、この方法は伝搬遅延や限界分解能に起因する誤差を生じる傾向がある。それにもかかわらず、いくつかの現存する無線メッシュネットワーク、特にWirelessHARTを利用する無線メッシュネットワークは、いかなるハードウェアの増設やソフトウェアへの重大な変更を行うことなく、より的確な位置検出が可能な機能強化ができるという特徴を備えている。
【0015】
図1は、発振器の変動を最小限に抑えてネットワーククロックの精度を改善する技術を示している。低速マイクロプロセッサのクロックを使用して高速発振器での変動を最小限に抑えることが可能である。プロセス10は、ステップ12で発振器カウンタを0にすることによって開始し、ステップ14で20msの割り込みを設定する。ほとんどの処理周期は標準値である20msを適用して定められる。次に、ステップ18で割り込みが発生するまで、ステップ16でノードが待機、または別のタスクが実行される。ステップ20でカウント値を読み込む。当該カウント値は20msの間にカウントした数である。例えば、この期間の発振器のティックの数がカウントされる。発振器の発信周波数が通常1×109Hzであった場合、理想的なカウント値は20,000,000ティックである。しかしながら、僅かな誤差が生じて20,000,010ティックになることもある。マクロプロセッサのクロックは発振器より正確なので、このカウント値はカウント校正乗数としてみなされ、種々のノードの発振器のカウント値をより高い分解能で比較するのに使用される。
【0016】
本発明はこのカウント校正乗数を使用し、2つのノード間の距離を測定するための飛行時間の算出精度を向上させる。この計算を完了するため、メッセージ送信を1つのノードで開始する時間と、もう1つのノードでメッセージを受信する時間とが解析される必要がある。時刻同期ネットワークにおいてでさえ、発振器周波数でのわずかな違いが距離計算に誤差を生じうる。
【0017】
図2は具体例としてのノードAのタイムライン40と、具体例としてのノードBのタイムライン42とを示すタイミング図である。ノードAはステップ44で第1の時間測定を開始し、距離指令読み取りメッセージ46をノードBに送信する。ステップ48でノードBは第2の時間測定を開始し、距離指令読み取りメッセージ46の受信を開始する。ステップ50で、ノードBはノードAに受信通知52を送信し、受信通知52の開始時点で時間測定を完了する。受信通知52を受信すると、ステップ54において受信確認52の受信を開始した時点でノードAは時間測定を停止する。ステップ56で、ノードBはノードBの時間測定値及びノードB用のカウント校正乗数を含む応答メッセージ58を生成する。ネットワークプロトコルによって要求される場合には、ノードAは受信通知60をノードBにさらに送信してもよい。
【0018】
経過時間の測定はタイムスタンプやカウンタを含む様々な技術を用いて行うことができる。タイムスタンプを使用するには、開始タイムスタンプと終了タイムスタンプとが記録される。大抵、自走クロックが使用される。第1のタイムスタンプを第2のタイムスタンプから減算し、2つのタイムスタンプ間の経過時間を取得する。カウンタのカウントはカウンタレジスタを0に初期化することで開始する。カウンタが停止または読み取りが行われるまでは、システムクロックによりカウンタがカウントを継続する。そしてレジスタの値が経過時間となる。
【0019】
経過時間測定の分解能は、通常マイクロプロセッサのクロックの周期と同じである。クロックが高速であるほど、経過時間測定からの正確な計算が可能となる。バッテリ駆動のフィールドデバイスで得られるクロック周波数は、約10〜20ナノ秒の測定分解能を得られるが、1ナノ秒の周期は容易に到達可能であり、良好な結果を生じる。
【0020】
受信通知メッセージの供給における遅延時間が判ると、飛行時間が計算可能になる。精度を向上するために、カウント校正乗数を使用し、各ノードのカウント校正乗数に応じて各ノードからの発振器のカウントを調整して、より正確な測定にする。
【0021】
距離は以下のように求められる。
d=(1/2)×c×((ノードAの校正乗数に応じたノードAの時間測定の調整)−(ノードBの校正乗数によって調整されたノードBの時間測定))
ここで、dはノード間の距離、cは光速を示している。
【0022】
例えば受信通知メッセージが約5msで送信されてノードが名目上1×109Hzの発振器を有する場合に、以下の具体的な値を生成するものとする。
ノードBは50,000,025ティックを計測する。
ノードAは50,000,100ティックを計測する。
ノードAは20,000,010のカウント校正乗数を有する。
ノードBは20,000,000のカウント校正乗数を有する。
d=(1/2)×3×108m/s/(1000ms/sec)×((50000100ティック/(20000010/20ティック/ms))−(50000025ティック/(20000000/20ティック/ms)))=7.5m
カウント校正乗数を用いない場合は以下のようになる。
d=(1/2)×3×108m/s/(1000ms/sec)×((50000100ティック/(20000000/20ティック/ms))−(50000025ティック/(20000000/20ティック/ms)))=11.25m
【0023】
カウント校正乗数を使用して発振器周波数のわずかな差異によるノード間の違いを低減する利点により、明らかにより正確な結果が得られる。この補償を利用することによって、高精度の結果を得るために発振器に対して非常に厳密な許容差は不要となり、この技術を幅広い種々のノードに組み合わせて使用可能である。最低3つのノードにより、2次元における位置を測定することができ、最低4つのノードにより、三角測量技術を用いることによって3次元の位置を測定することが可能となる。
【0024】
(無線メッシュネットワークにおける位置の探知)
位置探知により、資産についての位置情報を測定することが可能となる。資産は、人員、設備、装置、または他の様々なものとすることができる。位置は、「2号炉」等の既知の記述語、(x,y,z)座標などの絶対的な位置、いくつかの中間点からの(x,y,z)等の相対座標、またはこれら手法の組み合わせで表すことができる。この位置情報は、ハンドヘルド等の装置や、ネットワークノード自身により、或いはゲートウェイやバックエンドサーバにおいて測定することが可能である。位置情報は、資産の位置を示す動的オーバーレイを用いた地図としてユーザに示すことも可能である。資産自体はノードに関連づけられる。WirelessHARTの場合、全てのノードは、フィールドデバイス、ルータとして作動するデバイス、ハンドヘルド、ゲートウェイ、ネットワークマネージャ、ロケータビーコンとして作動するデバイス、及びアダプタとしてさらに分類される装置である。いくつかの装置は物体、即ち認可または不認可資産の可能性がある資産の存在を検知する動作検知装置を備えていてもよい。
【0025】
ロケータビーコンはアクティブでもパッシブでもよい。アクティブデバイスの場合は、ビーコン位置情報を自動的に送信する。パッシブデバイスの場合は、別のデバイスに応答したり、または単に別のノードの位置を測定する通信をモニタしたりする。
【0026】
位置情報は、補助的なサブネットワークを構築することにより収集可能であり、或いは主体となる無線メッシュネットワーク内で結合することが可能である。WirelessHARTネットワークの場合、位置情報はHARTコマンドの使用により、主体となるネットワークに統合することができる。測位能力を有するノードは、位置設定を読み書きするHARTコマンドをサポートして、ビーコンメッセージを送信する機能を有し、ビーコンメッセージを受信可能であり、位置を計算可能であり、またはこれらの組み合わせの機能を有する。
【0027】
ノードには、送信器、受信器、センサ、ランドマーク、中間点が組み込まれている。中間点及びランドマークは上記に列挙したいずれの方法でも表すことが可能な位置情報を出力する。本発明の代表的なインストール環境は、工場施設環境等の工業環境である。これは、高性能のビーコンデバイスが、照明レベル、電磁干渉、校正誤差、及び他のノイズ源によって影響を受けうることを意味する。より高性能なデバイスであれば、これらの問題の補償を試みてもよい。
【0028】
位置探知システムの優れた特徴は、上位システムに組み入れられてさらに資産の探知を支援するカードリーダ/バッジリーダを備えていることである。人員がバッジをつけてエリア内に入る、またはRFIDリーダを起動させると、所在が工場施設に関する正確な情報を含んで中央サーバに中継される。工場建屋に追加したビーコンデバイスによって、フィンガープリントの探知を向上させることができる。これらのアクセスポイントは、記号情報及び物理的な情報を有して構成することにより、工場建屋におけるより正確な資産の探索を支援することができる。さらに統合したシステムでは、組み合わせて工場全体の測位システムを形成するような地図ベースの測位システムを備えることもできる。SQLサーバ2008等のデータベースがそのようなシステムのためのサポートを提供する。
【0029】
ハードウェアのサポートを追加することなく、製造プラントに配置された既存の無線センサメッシュネットワークを用い、位置情報を測定して所在の認識を行うことができる。これを行うための2つの方法には、三角測量及びフィンガープリント法が含まれる。工場環境において、三角測量技術は、障害物、反射、及びマルチパスによる伝播遅延のために常には正確にならない。例えば、図3において、典型的な工場施設80が、無線通信を妨害する機械装置82、84を備えている。工場設備は無線通信等の電磁信号を妨げる金属で構成されていることが多い。微弱な信号は、マルチパスによる伝播通信方式に影響を及ぼし得る長い距離を必ずしも意味しない。フィンガープリント法は、訓練データを使用し、工場施設での確定した位置を定め、計測値に最も近い既知点を探索するものである。位置決定を達成する本発明の1つの方法は、訓練モードでのフィンガープリント法、並びに距離測定及び位置情報のデータベースを利用することである。
【0030】
工場施設80は、機械装置82、84の周りに分散して設置された複数の固定ノード86a〜86e(まとめてノード86とする)を有している。複数の対象位置90a〜90e(まとめて対象位置90とする)に技術者がモバイルノード88を携帯していく。対象位置90は単に重要な場所、または工場施設80にある様々な細分度の座標格子点であってもよい。それぞれの対象位置90で、モバイルノード88は範囲内にある全てのノード86からの距離を測定し、対象位置についての人員情報と共にネットワークマネージャに通知する。ネットワークマネージャは、ネットワーク4に接続するゲートウェイ92等のゲートウェイで実行するアプリケーション形式を含む多くの方法で実行可能である。距離測定は、三角測量、受信信号強度表示器(RSSI)、または前述のカウント校正乗数による修正を行う飛行時間演算を含む種々の技術によって達成可能である。
【0031】
代わりに、ノード86はモバイルノード88からの距離を測定し、ネットワークマネージャに位置情報と共に通知してもよい。もう1つの代替実施形態では、モバイルノード88及びノード86の両方がそれぞれの距離を測定してネットワークマネージャに通知する。ネットワークマネージャは、モバイルノード88からの測定値をノード86によって通知された測定値と比較し、相互に十分に値の近いものだけを蓄積することで、信頼性があり、正確な情報を確実にデータベースに蓄積する。ネットワークマネージャは新たに測定した情報を、すでにデータベースに記録されている情報と比較して、平均値に対する標準偏差内にある場合にだけ更新するようにしてもよい。このようにして、蓄積されたデータ点に関する品質及び信頼性が向上する。もう1つの実施形態は、無線メッシュネットワークに固定ノード及びモバイルノードの両方が存在しており、固定ノードからの測定値のみがデータベースに保存されるように、ネットワークマネージャ、あるいはノード86またはモバイルノード88のいずれか1つが受信した信号強度情報にフィルタをかける。
【0032】
前述した全ての実施形態において、モバイルノード88にGPSデバイスを接続して、受信信号強度測定が行われる対象位置90について、より高精度な記述が得られるようにしてもよい。工場施設80はGPS受信が限定された閉鎖構造であることが多いので、GPS中継器91を一時的または恒久的に設置してデータベースの構成を支援するようにしてもよい。
【0033】
グラフィカルインタフェースとして使用して既知のノードの位置をグラフィック(または地図)表示する端末96を備えたネットワーク94への伝達を含め、位置情報を様々な方法で使用可能である。端末96が既知のノードを探知し続け、無線メッシュネットワークの範囲によって規定された領域内における、未知のノードである物体を検知して警報を発することによって侵入検知機能を組み込んで構成してもよい。この物体の検出は、動作検知器、赤外線カメラ、近接検出器等の使用を含む種々の技術によって達成可能となる。また、この物体検出は無線メッシュネットワーク内の固定位置にある既知ノード間での受信信号強度、または距離測定値の、データベースにおける蓄積値からの偏差に基づいて測定可能となるものである。
【0034】
データベースが位置情報や関連する距離情報で満たされると、その後ノードの位置は近隣のノードとの距離を測定し、データベースと比較することによって確定する。後者のノードはシステムを構成するのに使用された同じモバイルノード、または無線メッシュネットワークの範囲に出入り可能な複数のノードのいずれか一方であってもよい。この処理は、これまでノードから通知された距離に最も厳密に整合する一群の距離ベクトルについてデータベースを検索することによって実行される。
【0035】
ニューラルネットワーク手法や最小自乗法を含む様々なデータベースの検索方法が可能である。一例として、最小自乗法について説明する。訓練工程で使用された固定位置の任意のノードをアンカーノードとすることができる。メッシュネットワーク内のN個のアンカーノードの検索を実行するために、まずモバイルノードMからアンカーノードi(i=1〜N)までの距離が収集され、SMiと称される。データベースは、既に予め蓄積された対象位置Lについてのアンカーノードまでの距離値のリストを含み、これらをSLi(i=1〜N)と称す。必要であれば、結果の値が送り手と受け手との間の物理的な距離に直線的に近似するように、対数関数を距離値に適用してもよい。これは、信号強度が距離に対して非線形となるRSSIの場合に特に有用である。M及びLは、各軸がアンカーノードを表すN次元空間で2つの点として処理される。このN次元空間におけるM及びLの間の幾何学的距離は、以下の式の平方根で求められる。
【0036】
【数1】

【0037】
全ての対象位置の中で、平方根の最小値を有する対象位置が、ノードMの現在の位置に対し、データベースに蓄積された最も近い対象位置となり、ノードMに関する位置測定が行われる。
【0038】
十分な数のノードを割り当てることで、経路伝播の変化があっても2つの離間した場所が同じような相対距離を有することが可能になる。さらに、近接した2つの位置は大きく異なる距離を有していてもよい。図4を参照すると、対象位置100a〜100f(まとめて対象位置100とする)がデータベースに蓄積され、位置固定されたノード102を含む工場施設内に分散している。ノード102からの距離は、円弧104a〜104cによって図示される距離となる。ノード106aは、ノード102が円弧104aに位置するような距離を演算する。ノード106bは、ノード102が円弧104bに位置するような距離を演算する。ノード106cは、ノード102が円弧104cに位置するような距離を演算する。測定誤差によって明確な位置を求められないが、対象位置100a、100b、及び100cを含む領域が求められる。これらの対象位置により、検索のためのデータベースの部分集合が生成される。対象位置100a、100b、及び100cに関連するデータベースの距離情報だけを評価すればよい。その結果、ノード102が対象位置100aに最も近いと迅速且つ確実に確定する。
【0039】
好ましい実施形態を参照して本発明を説明したが、本発明の趣旨や範囲からそれることなく、形状や詳細な構成について変更が可能であることは当業者に明らかである。
【技術分野】
【0001】
本発明は、概して無線ネットワークでの位置検出に係り、より詳しくは工業環境に設けられた無線メッシュネットワークでの位置検出に関する。
【背景技術】
【0002】
無線技術では、技術の組み合わせにより、低電力のマイクロプロセッサ、集積回路、測定技術、及び制御技術が進歩し、エネルギーの貯蔵により、低コスト、低電力装置の開発が可能となった。プロセスオートメーションへの適用における信頼性、レイテンシー、リアルタイム性、及び性能要件を満たすことができるようにすると共に、利用可能な資源に対する実用上の限界を考慮してセンサネットワーク内に無線装置を一緒に組み入れることは、困難な課題である。無線信号強度はやがて変動し、無線ノードは行ったり来たりする。種々の経路でデータが動的に送信され、バッテリが有するエネルギは有限である。これらの要求を満たすために、装置及びネットワークそのものによって通知される情報を用いて、ネットワーク管理技術により全体的なネットワークトポロジを形成可能でなければならず、レイテンシー、電力、及びスループットに関し、ネットワーク全体をスケジュールして最適化する必要がある。
【0003】
レイテンシーを管理すると共に、電力を浪費しないことが、今日無線センサネットワークが直面している課題である。レイテンシーを最小限に抑えるために、パケットが送信元から宛先に至る途中で遅延しないように通信手段が構築される必要がある。工業環境では、大抵数年間となるような長期にわたり、多くの場合は無人環境で低電力ノードを稼働させる必要がある。エネルギーを最小限に抑えるため、装置は可能な限り低電力の状態に維持しなければならない。
【0004】
センサネットワークにおいて標準的な通信距離の場合、無線チャネルで情報に耳を傾けることは、データ伝送とほぼ同じ電力量を消費することになる。さらに、アイドル状態にある装置のエネルギー消費量は、受信状態にある装置のエネルギー消費量とほぼ同じである。結果として、節電する最も効果的な方法は、無線通信及び装置自体の作動をアイドル時に停止することである。装置を停止するには、装置がアイドル状態になる時間及び電力供給を再び行うべき時間について事前に認識する必要がある。WirelessHART(登録商標)等、いくつかの工業用センサネットワークプロトコルで用いられる手法は、いつ装置を起動し、いついくつかの機能を実行し、いつスリープ状態に戻すべきかについての認識を有した装置を構成するものである。このような構成は、ネットワークマネージャによって実行され、タイムスケジューリングと称されている。
【発明の概要】
【発明が解決しようとする課題】
【0005】
この問題に取り組むための1つのアプローチは、WirelessHARTによって利用される時分割多元接続(TDMA)等の時刻同期した無線技術を使用することである。WirelessHARTは、パケット基盤によるパケットでチャンネルホッピングする直接拡散方式(DSSS)の無線通信と互換性のあるIEEE802.15.4を利用する2.4GHzのISMバンドで作動する安全なネットワーク技術である。
【0006】
装置及びアプリケーションが規定する通信要求と組み合わせてネットワーク全体のルーティング情報を使用する集中型ネットワークマネージャによって、スケジューリングが実行される。スケジュールはスロットに細分化され、ネットワークマネージャから各装置に伝送される。装置には、各装置が送信要求または受信要求を有するスロットが提供されるだけである。ネットワークマネージャはネットワークグラフとネットワークスケジュールとを常に適合させ、ネットワークトポロジや通信要求を変更する。
【0007】
また、ネットワークマネージャはネットワーク通信パラメータ値を初期化して維持管理している。ネットワークマネージャは、ネットワークへの接続及び切断のほか、専用ネットワークリソース及び共用ネットワークリソースの管理のための仕組みも提供している。さらに、ネットワークマネージャは、ネットワーク全体の健全性についての診断情報を収集及び維持管理し、ホストベースのアプリケーションに通知する任務を負う。
【0008】
工業センサネットワークでの望ましい特徴は、工場建屋にいる人々や資産を探知できることであり、さらにその後で侵入者を検知できることである。位置検出を実行する従来の方法では、位置検出を実行して通知するための別個の基本設備に加え、種々のセンサ、ビーコン、及び検出器の設置を必要としていた。これらのシステムは多くの場合、別個に実行するには費用がかかりすぎ、位置情報を含まないセンサネットワークシステムとなっている。既存の無線センサネットワークインフラを使用して位置検出する方法が必要とされている。
【課題を解決するための手段】
【0009】
本発明の一態様は、第1のノードによって第1カウント校正乗数を測定し、第2のノードによって第2カウント校正乗数を測定するステップを有している。メッセージが前記第1のノードによって送信され、前記第2のノードによって受信される。第2のメッセージが前記第2のノードによって送信され、前記第1のノードによって受信される。第1のメッセージの送信開始から前記第2のメッセージの受信開始までの第1経過時間が測定される。前記第1メッセージの受信開始から前記第2メッセージの送信開始までの第2経過時間も測定される。第3のメッセージが前記第2経過時間を含み、前記第2のノードによって送信され、前記第1のノードによって受信される。前記第2カウント校正乗数は、前記第2のメッセージ及び前記第3のメッセージのいずれかを含む。そして、前記第1経過時間及び前記第2経過時間並びに前記第1カウント校正乗数及び前記第2カウント校正乗数に基づいて、前記第1のノードと前記第2のノードとの間の距離が求められる。
【0010】
本発明の別の態様では、無線メッシュネットワーク内のノードの位置探索の方法が示される。無線メッシュネットワーク内の2つ以上の位置にノードが配置される。それぞれの位置に関して、前記ノードの位置情報が測定される。前記無線メッシュネットワークに配置された別のノードからの距離が測定され、前記ノードの位置情報がネットワークマネージャに送信される。前記ネットワークマネージャは、各位置に関して、距離と位置情報とを蓄積する。
【図面の簡単な説明】
【0011】
【図1】カウント校正乗数を測定する方法を示すフローチャートである。
【図2】飛行時間の計算を示すタイミング図である。
【図3】無線メッシュネットワークでの代表的なノードの配置を示す空間図である。
【図4】もう1つ別のノードがある可能性のある位置範囲を狭めるのに使用可能な近隣ノードまでの距離測定を示す図である。
【発明を実施するための形態】
【0012】
工業センサネットワーク、特にWirelessHART等、時刻同期した無線メッシュネットワークを利用する工業センサネットワークは、工場建屋にいる人々や資産を探知可能な位置検出に使用することができる。より高度な設備では、侵入者の探知も可能となる。
【0013】
ネットワーク内の各デバイスが機能強化され、絶対位置情報または相対位置情報を備えると共に、三角測量、マッピング、または他の数学的手法に基づいて位置を計算するアルゴリズムを備える。ロケータービーコンなどの専門化したデバイスは、ネットワーク内にあるハンドヘルドデバイス等のモバイルノードと、位置を識別するために人員に取り付けられた位置センサとによってネットワーク内で使用される周期的なビーコンを放射する。これらのノードは、工場建屋のフィールドデバイスやビーコンデバイスといった、無線メッシュネットワーク内に設置されている別のノードとの通信に基づいて位置を測定するアルゴリズムを備えることができる。さらに、それらのノードはフィールドデバイスやビーコンデバイスに絶対的中間点または相対的中間点を介装させることが可能である。ハンドヘルド等のデバイスは、工場建屋の周りを移動して、ノードを探索する精度を向上させる相対的中間点情報を組み入れる付加機能を有する。相対的中間点情報はネットワークマネージャ等のホストコンピュータにある、製造設備の地図を備えた中枢アプリケーションにフィードバック可能である。そして、無線メッシュネットワーク内を移動する資産や人員の位置が、中枢アプリケーションにおいて、これらの情報を使用して特定される。
【0014】
(時間調整フィールド)
メッセージが2つのモジュール間で送信される場合に飛行時間測定法(a time of flight measurement)を、2つのノード間の距離を測定するために構築し使用可能である。距離測定の精度は、時間測定の精度に直接関係する。無線メッシュネットワークでは、1つのノードが送信してもう1つのノードが受信する。無線リンクの他に、2つのノード間を接続するものはない。各ノードは時間の検知機能を自ら有している。グローバルクロックをタイムスタンプメッセージに使用可能だが、この方法は伝搬遅延や限界分解能に起因する誤差を生じる傾向がある。それにもかかわらず、いくつかの現存する無線メッシュネットワーク、特にWirelessHARTを利用する無線メッシュネットワークは、いかなるハードウェアの増設やソフトウェアへの重大な変更を行うことなく、より的確な位置検出が可能な機能強化ができるという特徴を備えている。
【0015】
図1は、発振器の変動を最小限に抑えてネットワーククロックの精度を改善する技術を示している。低速マイクロプロセッサのクロックを使用して高速発振器での変動を最小限に抑えることが可能である。プロセス10は、ステップ12で発振器カウンタを0にすることによって開始し、ステップ14で20msの割り込みを設定する。ほとんどの処理周期は標準値である20msを適用して定められる。次に、ステップ18で割り込みが発生するまで、ステップ16でノードが待機、または別のタスクが実行される。ステップ20でカウント値を読み込む。当該カウント値は20msの間にカウントした数である。例えば、この期間の発振器のティックの数がカウントされる。発振器の発信周波数が通常1×109Hzであった場合、理想的なカウント値は20,000,000ティックである。しかしながら、僅かな誤差が生じて20,000,010ティックになることもある。マクロプロセッサのクロックは発振器より正確なので、このカウント値はカウント校正乗数としてみなされ、種々のノードの発振器のカウント値をより高い分解能で比較するのに使用される。
【0016】
本発明はこのカウント校正乗数を使用し、2つのノード間の距離を測定するための飛行時間の算出精度を向上させる。この計算を完了するため、メッセージ送信を1つのノードで開始する時間と、もう1つのノードでメッセージを受信する時間とが解析される必要がある。時刻同期ネットワークにおいてでさえ、発振器周波数でのわずかな違いが距離計算に誤差を生じうる。
【0017】
図2は具体例としてのノードAのタイムライン40と、具体例としてのノードBのタイムライン42とを示すタイミング図である。ノードAはステップ44で第1の時間測定を開始し、距離指令読み取りメッセージ46をノードBに送信する。ステップ48でノードBは第2の時間測定を開始し、距離指令読み取りメッセージ46の受信を開始する。ステップ50で、ノードBはノードAに受信通知52を送信し、受信通知52の開始時点で時間測定を完了する。受信通知52を受信すると、ステップ54において受信確認52の受信を開始した時点でノードAは時間測定を停止する。ステップ56で、ノードBはノードBの時間測定値及びノードB用のカウント校正乗数を含む応答メッセージ58を生成する。ネットワークプロトコルによって要求される場合には、ノードAは受信通知60をノードBにさらに送信してもよい。
【0018】
経過時間の測定はタイムスタンプやカウンタを含む様々な技術を用いて行うことができる。タイムスタンプを使用するには、開始タイムスタンプと終了タイムスタンプとが記録される。大抵、自走クロックが使用される。第1のタイムスタンプを第2のタイムスタンプから減算し、2つのタイムスタンプ間の経過時間を取得する。カウンタのカウントはカウンタレジスタを0に初期化することで開始する。カウンタが停止または読み取りが行われるまでは、システムクロックによりカウンタがカウントを継続する。そしてレジスタの値が経過時間となる。
【0019】
経過時間測定の分解能は、通常マイクロプロセッサのクロックの周期と同じである。クロックが高速であるほど、経過時間測定からの正確な計算が可能となる。バッテリ駆動のフィールドデバイスで得られるクロック周波数は、約10〜20ナノ秒の測定分解能を得られるが、1ナノ秒の周期は容易に到達可能であり、良好な結果を生じる。
【0020】
受信通知メッセージの供給における遅延時間が判ると、飛行時間が計算可能になる。精度を向上するために、カウント校正乗数を使用し、各ノードのカウント校正乗数に応じて各ノードからの発振器のカウントを調整して、より正確な測定にする。
【0021】
距離は以下のように求められる。
d=(1/2)×c×((ノードAの校正乗数に応じたノードAの時間測定の調整)−(ノードBの校正乗数によって調整されたノードBの時間測定))
ここで、dはノード間の距離、cは光速を示している。
【0022】
例えば受信通知メッセージが約5msで送信されてノードが名目上1×109Hzの発振器を有する場合に、以下の具体的な値を生成するものとする。
ノードBは50,000,025ティックを計測する。
ノードAは50,000,100ティックを計測する。
ノードAは20,000,010のカウント校正乗数を有する。
ノードBは20,000,000のカウント校正乗数を有する。
d=(1/2)×3×108m/s/(1000ms/sec)×((50000100ティック/(20000010/20ティック/ms))−(50000025ティック/(20000000/20ティック/ms)))=7.5m
カウント校正乗数を用いない場合は以下のようになる。
d=(1/2)×3×108m/s/(1000ms/sec)×((50000100ティック/(20000000/20ティック/ms))−(50000025ティック/(20000000/20ティック/ms)))=11.25m
【0023】
カウント校正乗数を使用して発振器周波数のわずかな差異によるノード間の違いを低減する利点により、明らかにより正確な結果が得られる。この補償を利用することによって、高精度の結果を得るために発振器に対して非常に厳密な許容差は不要となり、この技術を幅広い種々のノードに組み合わせて使用可能である。最低3つのノードにより、2次元における位置を測定することができ、最低4つのノードにより、三角測量技術を用いることによって3次元の位置を測定することが可能となる。
【0024】
(無線メッシュネットワークにおける位置の探知)
位置探知により、資産についての位置情報を測定することが可能となる。資産は、人員、設備、装置、または他の様々なものとすることができる。位置は、「2号炉」等の既知の記述語、(x,y,z)座標などの絶対的な位置、いくつかの中間点からの(x,y,z)等の相対座標、またはこれら手法の組み合わせで表すことができる。この位置情報は、ハンドヘルド等の装置や、ネットワークノード自身により、或いはゲートウェイやバックエンドサーバにおいて測定することが可能である。位置情報は、資産の位置を示す動的オーバーレイを用いた地図としてユーザに示すことも可能である。資産自体はノードに関連づけられる。WirelessHARTの場合、全てのノードは、フィールドデバイス、ルータとして作動するデバイス、ハンドヘルド、ゲートウェイ、ネットワークマネージャ、ロケータビーコンとして作動するデバイス、及びアダプタとしてさらに分類される装置である。いくつかの装置は物体、即ち認可または不認可資産の可能性がある資産の存在を検知する動作検知装置を備えていてもよい。
【0025】
ロケータビーコンはアクティブでもパッシブでもよい。アクティブデバイスの場合は、ビーコン位置情報を自動的に送信する。パッシブデバイスの場合は、別のデバイスに応答したり、または単に別のノードの位置を測定する通信をモニタしたりする。
【0026】
位置情報は、補助的なサブネットワークを構築することにより収集可能であり、或いは主体となる無線メッシュネットワーク内で結合することが可能である。WirelessHARTネットワークの場合、位置情報はHARTコマンドの使用により、主体となるネットワークに統合することができる。測位能力を有するノードは、位置設定を読み書きするHARTコマンドをサポートして、ビーコンメッセージを送信する機能を有し、ビーコンメッセージを受信可能であり、位置を計算可能であり、またはこれらの組み合わせの機能を有する。
【0027】
ノードには、送信器、受信器、センサ、ランドマーク、中間点が組み込まれている。中間点及びランドマークは上記に列挙したいずれの方法でも表すことが可能な位置情報を出力する。本発明の代表的なインストール環境は、工場施設環境等の工業環境である。これは、高性能のビーコンデバイスが、照明レベル、電磁干渉、校正誤差、及び他のノイズ源によって影響を受けうることを意味する。より高性能なデバイスであれば、これらの問題の補償を試みてもよい。
【0028】
位置探知システムの優れた特徴は、上位システムに組み入れられてさらに資産の探知を支援するカードリーダ/バッジリーダを備えていることである。人員がバッジをつけてエリア内に入る、またはRFIDリーダを起動させると、所在が工場施設に関する正確な情報を含んで中央サーバに中継される。工場建屋に追加したビーコンデバイスによって、フィンガープリントの探知を向上させることができる。これらのアクセスポイントは、記号情報及び物理的な情報を有して構成することにより、工場建屋におけるより正確な資産の探索を支援することができる。さらに統合したシステムでは、組み合わせて工場全体の測位システムを形成するような地図ベースの測位システムを備えることもできる。SQLサーバ2008等のデータベースがそのようなシステムのためのサポートを提供する。
【0029】
ハードウェアのサポートを追加することなく、製造プラントに配置された既存の無線センサメッシュネットワークを用い、位置情報を測定して所在の認識を行うことができる。これを行うための2つの方法には、三角測量及びフィンガープリント法が含まれる。工場環境において、三角測量技術は、障害物、反射、及びマルチパスによる伝播遅延のために常には正確にならない。例えば、図3において、典型的な工場施設80が、無線通信を妨害する機械装置82、84を備えている。工場設備は無線通信等の電磁信号を妨げる金属で構成されていることが多い。微弱な信号は、マルチパスによる伝播通信方式に影響を及ぼし得る長い距離を必ずしも意味しない。フィンガープリント法は、訓練データを使用し、工場施設での確定した位置を定め、計測値に最も近い既知点を探索するものである。位置決定を達成する本発明の1つの方法は、訓練モードでのフィンガープリント法、並びに距離測定及び位置情報のデータベースを利用することである。
【0030】
工場施設80は、機械装置82、84の周りに分散して設置された複数の固定ノード86a〜86e(まとめてノード86とする)を有している。複数の対象位置90a〜90e(まとめて対象位置90とする)に技術者がモバイルノード88を携帯していく。対象位置90は単に重要な場所、または工場施設80にある様々な細分度の座標格子点であってもよい。それぞれの対象位置90で、モバイルノード88は範囲内にある全てのノード86からの距離を測定し、対象位置についての人員情報と共にネットワークマネージャに通知する。ネットワークマネージャは、ネットワーク4に接続するゲートウェイ92等のゲートウェイで実行するアプリケーション形式を含む多くの方法で実行可能である。距離測定は、三角測量、受信信号強度表示器(RSSI)、または前述のカウント校正乗数による修正を行う飛行時間演算を含む種々の技術によって達成可能である。
【0031】
代わりに、ノード86はモバイルノード88からの距離を測定し、ネットワークマネージャに位置情報と共に通知してもよい。もう1つの代替実施形態では、モバイルノード88及びノード86の両方がそれぞれの距離を測定してネットワークマネージャに通知する。ネットワークマネージャは、モバイルノード88からの測定値をノード86によって通知された測定値と比較し、相互に十分に値の近いものだけを蓄積することで、信頼性があり、正確な情報を確実にデータベースに蓄積する。ネットワークマネージャは新たに測定した情報を、すでにデータベースに記録されている情報と比較して、平均値に対する標準偏差内にある場合にだけ更新するようにしてもよい。このようにして、蓄積されたデータ点に関する品質及び信頼性が向上する。もう1つの実施形態は、無線メッシュネットワークに固定ノード及びモバイルノードの両方が存在しており、固定ノードからの測定値のみがデータベースに保存されるように、ネットワークマネージャ、あるいはノード86またはモバイルノード88のいずれか1つが受信した信号強度情報にフィルタをかける。
【0032】
前述した全ての実施形態において、モバイルノード88にGPSデバイスを接続して、受信信号強度測定が行われる対象位置90について、より高精度な記述が得られるようにしてもよい。工場施設80はGPS受信が限定された閉鎖構造であることが多いので、GPS中継器91を一時的または恒久的に設置してデータベースの構成を支援するようにしてもよい。
【0033】
グラフィカルインタフェースとして使用して既知のノードの位置をグラフィック(または地図)表示する端末96を備えたネットワーク94への伝達を含め、位置情報を様々な方法で使用可能である。端末96が既知のノードを探知し続け、無線メッシュネットワークの範囲によって規定された領域内における、未知のノードである物体を検知して警報を発することによって侵入検知機能を組み込んで構成してもよい。この物体の検出は、動作検知器、赤外線カメラ、近接検出器等の使用を含む種々の技術によって達成可能となる。また、この物体検出は無線メッシュネットワーク内の固定位置にある既知ノード間での受信信号強度、または距離測定値の、データベースにおける蓄積値からの偏差に基づいて測定可能となるものである。
【0034】
データベースが位置情報や関連する距離情報で満たされると、その後ノードの位置は近隣のノードとの距離を測定し、データベースと比較することによって確定する。後者のノードはシステムを構成するのに使用された同じモバイルノード、または無線メッシュネットワークの範囲に出入り可能な複数のノードのいずれか一方であってもよい。この処理は、これまでノードから通知された距離に最も厳密に整合する一群の距離ベクトルについてデータベースを検索することによって実行される。
【0035】
ニューラルネットワーク手法や最小自乗法を含む様々なデータベースの検索方法が可能である。一例として、最小自乗法について説明する。訓練工程で使用された固定位置の任意のノードをアンカーノードとすることができる。メッシュネットワーク内のN個のアンカーノードの検索を実行するために、まずモバイルノードMからアンカーノードi(i=1〜N)までの距離が収集され、SMiと称される。データベースは、既に予め蓄積された対象位置Lについてのアンカーノードまでの距離値のリストを含み、これらをSLi(i=1〜N)と称す。必要であれば、結果の値が送り手と受け手との間の物理的な距離に直線的に近似するように、対数関数を距離値に適用してもよい。これは、信号強度が距離に対して非線形となるRSSIの場合に特に有用である。M及びLは、各軸がアンカーノードを表すN次元空間で2つの点として処理される。このN次元空間におけるM及びLの間の幾何学的距離は、以下の式の平方根で求められる。
【0036】
【数1】
【0037】
全ての対象位置の中で、平方根の最小値を有する対象位置が、ノードMの現在の位置に対し、データベースに蓄積された最も近い対象位置となり、ノードMに関する位置測定が行われる。
【0038】
十分な数のノードを割り当てることで、経路伝播の変化があっても2つの離間した場所が同じような相対距離を有することが可能になる。さらに、近接した2つの位置は大きく異なる距離を有していてもよい。図4を参照すると、対象位置100a〜100f(まとめて対象位置100とする)がデータベースに蓄積され、位置固定されたノード102を含む工場施設内に分散している。ノード102からの距離は、円弧104a〜104cによって図示される距離となる。ノード106aは、ノード102が円弧104aに位置するような距離を演算する。ノード106bは、ノード102が円弧104bに位置するような距離を演算する。ノード106cは、ノード102が円弧104cに位置するような距離を演算する。測定誤差によって明確な位置を求められないが、対象位置100a、100b、及び100cを含む領域が求められる。これらの対象位置により、検索のためのデータベースの部分集合が生成される。対象位置100a、100b、及び100cに関連するデータベースの距離情報だけを評価すればよい。その結果、ノード102が対象位置100aに最も近いと迅速且つ確実に確定する。
【0039】
好ましい実施形態を参照して本発明を説明したが、本発明の趣旨や範囲からそれることなく、形状や詳細な構成について変更が可能であることは当業者に明らかである。
【特許請求の範囲】
【請求項1】
第1のノードによって第1カウント校正乗数を測定するステップと、
第2のノードによって第2カウント校正乗数を測定するステップと、
前記第1のノードによって第1のメッセージを送信するステップと、
前記第2のノードによって前記第1のメッセージを受信するステップと、
前記第2のノードによって第2のメッセージを送信するステップと、
前記第1のノードによって前記第2のメッセージを受信するステップと、
前記第1のメッセージの送信開始から前記第2のメッセージの受信開始までの第1経過時間を測定するステップと、
前記第1のメッセージの受信開始から前記第2のメッセージの送信開始までの第2経過時間を測定するステップと、
前記第2のノードによって、前記第2経過時間を含む第3のメッセージを送信するステップと、
前記第1のノードによって前記第3のメッセージを受信するステップと、
前記第1経過時間、前記第2経過時間、前記第1カウント校正乗数、及び前記第2カウント校正乗数に基づいて、前記第1のノードと前記第2のノードとの間の距離を求めるステップと、を含み、
前記第2カウント校正乗数は、前記第2のメッセージまたは前記第3のメッセージのいずれか一方に含まれることを特徴とする無線メッシュネットワーク内のノードを探知する方法。
【請求項2】
前記第1のメッセージの送信開始から前記第2のメッセージの受信開始までの第1経過時間を測定するステップは、
前記第1のメッセージの送信開始時の第1タイムスタンプを記録するステップと、
前記第2のメッセージの受信開始時の第2タイムスタンプを記録するステップと、
前記第2タイムスタンプから前記第1タイムスタンプを減算することによって前記第1経過時間を求めるステップと、
をさらに有することを特徴とする請求項1に記載の方法。
【請求項3】
前記第1のメッセージの受信開始から前記第2のメッセージの送信開始までの第2経過時間を測定するステップは、
前記第1のメッセージの受信開始時の第1タイムスタンプを記録するステップと、
前記第2のメッセージの送信開始時の第2タイムスタンプを記録するステップと、
前記第2タイムスタンプから前記第1タイムスタンプを減算することによって前記第2経過時間を求めるステップと、
をさらに有することを特徴とする請求項1に記載の方法。
【請求項4】
前記第1のメッセージの送信開始から前記第2のメッセージの受信開始までの第1経過時間を測定するステップは、
前記第1のメッセージの送信開始時にカウンタのカウントを開始するステップと、
前記第2のメッセージの受信開始時に前記カウンタのカウント値を読み込み、前記第1経過時間を測定するステップと、
をさらに有することを特徴とする請求項1に記載の方法。
【請求項5】
前記第1のメッセージの受信開始から前記第2のメッセージの送信開始までの第2経過時間を測定するステップは、
前記第1のメッセージの受信開始時にカウンタのカウントを開始するステップと、
前記第2のメッセージの送信開始時に前記カウンタのカウント値を読み込み、前記第2経過時間を測定するステップと、
をさらに有することを特徴とする請求項1に記載の方法。
【請求項6】
前記第1経過時間及び前記第2経過時間は、少なくとも1ナノ秒の分解能を有することを特徴とする請求項1に記載の方法。
【請求項7】
前記第1経過時間及び前記第2経過時間は、約10ナノ秒の分解能を有することを特徴とする請求項1に記載の方法。
【請求項8】
前記第1経過時間及び前記第2経過時間は、約20ナノ秒の分解能を有することを特徴とする請求項1に記載の方法。
【請求項9】
前記第1のノードと第3のノードとの間の距離を測定するステップと、
前記第1のノードと前記第2のノードとの間の距離と、前記第1のノードと前記第3のノードとの間の距離とに基づき、2次元での前記第1ノードの位置を演算するステップと、
をさらに含むことを特徴とする請求項1に記載の方法。
【請求項10】
前記第1のノードの位置をネットワークマネージャに通知するステップと、
前記ネットワークマネージャによって、前記第1のノードの位置を含む地図を維持管理するステップと、
をさらに含むことを特徴とする請求項9に記載の方法。
【請求項11】
グラフィカルインタフェースに前記地図を表示するステップをさらに含むことを特徴とする請求項10に記載の方法。
【請求項12】
前記地図によって規定された領域内にある全ての既知ノードの位置を維持管理するステップと、
前記領域内の物体を検出するステップと、
前記領域内の前記物体が既知のノードではない場合に警報を発するステップと、
をさらに含むことを特徴とする請求項10に記載の方法。
【請求項13】
前記第1のノードと第3のノードとの間の距離を測定するステップと、
前記第1のノードと第4のノードとの間の距離を測定するステップと、
前記第1のノードと前記第2のノードとの間の距離、前記第1のノードと前記第3のノードとの間の距離、及び前記第1のノードと前記第4のノードとの間の距離に基づき、3次元での前記第1のノードの位置を演算するステップと、
をさらに含むことを特徴とする請求項1に記載の方法。
【請求項14】
前記第1のノードの位置をネットワークマネージャに通知するステップと、
前記ネットワークマネージャによって、前記第1のノードの位置を含む地図を維持管理するステップと、
をさらに含むことを特徴とする請求項13に記載の方法。
【請求項15】
グラフィカルインタフェースに前記地図を表示するステップをさらに含むことを特徴とする請求項14に記載の方法。
【請求項16】
前記地図によって規定された領域内にある全ての既知ノードの位置を維持管理するステップと、
前記領域内にある物体を検出するステップと、
前記物体が前記領域内の既知のノードではない場合に、警報を発するステップと、
をさらに含むことを特徴とする請求項15に記載の方法。
【請求項17】
無線メッシュネットワーク内の2つ以上の位置にノードを配置するステップと、
各位置に関し、前記ノードの位置情報を測定するステップと、
前記ノードと、前記無線メッシュネットワークに設置された複数のノードとの間でカウント校正乗数を取り交わすステップと、
飛行時間測定法及び前記カウント校正乗数を使用して、前記複数のノードから各位置の前記ノードまでの第1の複数の距離を測定するステップと、
前記第1の複数の距離と、各位置のノードに関する位置情報とをネットワークマネージャに送信するステップと、
前記ネットワークマネージャによって、前記第1の複数の距離と、各位置の位置情報とを蓄積するステップと、
を含むことを特徴とする無線メッシュネットワーク内のノードを探知する方法。
【請求項18】
前記ネットワークマネージャによって、前記第1の複数の距離と、各位置の位置情報とを蓄積するステップは、前記第1の複数の距離をフィルタリングして固定ノードに関連する距離だけを蓄積するステップをさらに有することを特徴とする請求項17に記載の方法。
【請求項19】
前記ネットワークマネージャによって、前記第1の複数の距離と、各位置の位置情報とを蓄積するステップは、前記第1の複数の距離を予め蓄積された複数の距離の一群と比較し、前記予め蓄積された複数の距離の一群の標準偏差内にある距離だけを蓄積するステップをさらに有することを特徴とする請求項17に記載の方法。
【請求項20】
前記第1の複数の距離と、各位置のノードに関する位置情報とをネットワークマネージャに送信するステップは、前記第1の複数の距離をフィルタリングし、固定ノードに関連する距離だけを送信するステップをさらに備えることを特徴とする請求項17に記載の方法。
【請求項21】
前記複数のノードの少なくとも1つはロケータビーコンであることを特徴とする請求項17に記載の方法。
【請求項22】
前記ノードはモバイルノードであることを特徴とする請求項17に記載の方法。
【請求項23】
前記複数のノードから各位置の前記ノードまでの第1の複数の距離を測定するステップは、飛行時間測定法及びカウント校正乗数を使用して前記第1の複数の距離を演算するステップを有することを特徴とする請求項17に記載の方法。
【請求項24】
各位置の前記ノードに関する位置情報を測定するステップは、前記ノードの位置のGPS測定結果を取得するステップをさらに有することを特徴とする請求項17に記載の方法。
【請求項25】
各位置の前記ノードに関する位置情報を測定するステップは、前記無線メッシュネットワークの近傍に設置されたGPS中継器を使用してGPS測定結果の信号強度を強めるステップをさらに有することを特徴とする請求項24に記載の方法。
【請求項26】
前記無線メッシュネットワーク内に前記ノードを配置するステップと、
前記無線メッシュネットワークに設置された前記複数のノードから前記ノードまでの第2の複数の距離を測定するステップと、
前記第2の複数の距離を前記ネットワークマネージャに送信するステップと、
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記ノードの位置を特定するステップと、
をさらに含むことを特徴とする請求項17に記載の方法。
【請求項27】
前記無線メッシュネットワークに第2のノードを配置するステップと、
前記無線メッシュネットワークに設置された前記複数のノードから前記第2のノードまでの第2の複数の距離を測定するステップと、
前記第2の複数の距離を前記ネットワークマネージャに送信するステップと、
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記第2のノードの位置を特定するステップと、
をさらに含むことを特徴とする請求項17に記載の方法。
【請求項28】
前記無線メッシュネットワークに設置された前記複数のノードから前記第2のノードまでの前記第2の複数の距離を測定するステップは、飛行時間測定法及びカウント校正乗数を使用して前記第2の複数の距離を演算するステップをさらに有することを特徴とする請求項27に記載の方法。
【請求項29】
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記第2のノードの位置を特定するステップは、前記第2の複数の距離に基づく領域を三角測量し、蓄積された前記第1の複数の距離及び蓄積された前記位置情報で前記領域内にあるものだけを検索するステップをさらに有することを特徴とする請求項27に記載の方法。
【請求項30】
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記第2のノードの位置を特定するステップは、蓄積された前記第1の複数の距離と、蓄積された前記位置情報とを、最小自乗法を用いて検索するステップをさらに有することを特徴とする請求項27に記載の方法。
【請求項31】
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記第2のノードの位置を特定するステップは、蓄積された前記第1の複数の距離と、蓄積された前記位置情報とを、ニューラルネットワークアルゴリズムを用いて検索するステップをさらに有することを特徴とする請求項27に記載の方法。
【請求項32】
前記第2のノードの位置をグラフィックで表示するステップをさらに含むことを特徴とする請求項27に記載の方法。
【請求項33】
前記無線メッシュネットワークにある全ての既知ノードの位置の状態を維持管理するステップと、
前記無線メッシュネットワークの適用範囲の領域内にある物体の位置を検出するステップと、
前記物体の位置が前記無線メッシュネットワークの既知のノードでない場合には、警報を発するステップと、
をさらに含むことを特徴とする請求項27に記載の方法。
【請求項1】
第1のノードによって第1カウント校正乗数を測定するステップと、
第2のノードによって第2カウント校正乗数を測定するステップと、
前記第1のノードによって第1のメッセージを送信するステップと、
前記第2のノードによって前記第1のメッセージを受信するステップと、
前記第2のノードによって第2のメッセージを送信するステップと、
前記第1のノードによって前記第2のメッセージを受信するステップと、
前記第1のメッセージの送信開始から前記第2のメッセージの受信開始までの第1経過時間を測定するステップと、
前記第1のメッセージの受信開始から前記第2のメッセージの送信開始までの第2経過時間を測定するステップと、
前記第2のノードによって、前記第2経過時間を含む第3のメッセージを送信するステップと、
前記第1のノードによって前記第3のメッセージを受信するステップと、
前記第1経過時間、前記第2経過時間、前記第1カウント校正乗数、及び前記第2カウント校正乗数に基づいて、前記第1のノードと前記第2のノードとの間の距離を求めるステップと、を含み、
前記第2カウント校正乗数は、前記第2のメッセージまたは前記第3のメッセージのいずれか一方に含まれることを特徴とする無線メッシュネットワーク内のノードを探知する方法。
【請求項2】
前記第1のメッセージの送信開始から前記第2のメッセージの受信開始までの第1経過時間を測定するステップは、
前記第1のメッセージの送信開始時の第1タイムスタンプを記録するステップと、
前記第2のメッセージの受信開始時の第2タイムスタンプを記録するステップと、
前記第2タイムスタンプから前記第1タイムスタンプを減算することによって前記第1経過時間を求めるステップと、
をさらに有することを特徴とする請求項1に記載の方法。
【請求項3】
前記第1のメッセージの受信開始から前記第2のメッセージの送信開始までの第2経過時間を測定するステップは、
前記第1のメッセージの受信開始時の第1タイムスタンプを記録するステップと、
前記第2のメッセージの送信開始時の第2タイムスタンプを記録するステップと、
前記第2タイムスタンプから前記第1タイムスタンプを減算することによって前記第2経過時間を求めるステップと、
をさらに有することを特徴とする請求項1に記載の方法。
【請求項4】
前記第1のメッセージの送信開始から前記第2のメッセージの受信開始までの第1経過時間を測定するステップは、
前記第1のメッセージの送信開始時にカウンタのカウントを開始するステップと、
前記第2のメッセージの受信開始時に前記カウンタのカウント値を読み込み、前記第1経過時間を測定するステップと、
をさらに有することを特徴とする請求項1に記載の方法。
【請求項5】
前記第1のメッセージの受信開始から前記第2のメッセージの送信開始までの第2経過時間を測定するステップは、
前記第1のメッセージの受信開始時にカウンタのカウントを開始するステップと、
前記第2のメッセージの送信開始時に前記カウンタのカウント値を読み込み、前記第2経過時間を測定するステップと、
をさらに有することを特徴とする請求項1に記載の方法。
【請求項6】
前記第1経過時間及び前記第2経過時間は、少なくとも1ナノ秒の分解能を有することを特徴とする請求項1に記載の方法。
【請求項7】
前記第1経過時間及び前記第2経過時間は、約10ナノ秒の分解能を有することを特徴とする請求項1に記載の方法。
【請求項8】
前記第1経過時間及び前記第2経過時間は、約20ナノ秒の分解能を有することを特徴とする請求項1に記載の方法。
【請求項9】
前記第1のノードと第3のノードとの間の距離を測定するステップと、
前記第1のノードと前記第2のノードとの間の距離と、前記第1のノードと前記第3のノードとの間の距離とに基づき、2次元での前記第1ノードの位置を演算するステップと、
をさらに含むことを特徴とする請求項1に記載の方法。
【請求項10】
前記第1のノードの位置をネットワークマネージャに通知するステップと、
前記ネットワークマネージャによって、前記第1のノードの位置を含む地図を維持管理するステップと、
をさらに含むことを特徴とする請求項9に記載の方法。
【請求項11】
グラフィカルインタフェースに前記地図を表示するステップをさらに含むことを特徴とする請求項10に記載の方法。
【請求項12】
前記地図によって規定された領域内にある全ての既知ノードの位置を維持管理するステップと、
前記領域内の物体を検出するステップと、
前記領域内の前記物体が既知のノードではない場合に警報を発するステップと、
をさらに含むことを特徴とする請求項10に記載の方法。
【請求項13】
前記第1のノードと第3のノードとの間の距離を測定するステップと、
前記第1のノードと第4のノードとの間の距離を測定するステップと、
前記第1のノードと前記第2のノードとの間の距離、前記第1のノードと前記第3のノードとの間の距離、及び前記第1のノードと前記第4のノードとの間の距離に基づき、3次元での前記第1のノードの位置を演算するステップと、
をさらに含むことを特徴とする請求項1に記載の方法。
【請求項14】
前記第1のノードの位置をネットワークマネージャに通知するステップと、
前記ネットワークマネージャによって、前記第1のノードの位置を含む地図を維持管理するステップと、
をさらに含むことを特徴とする請求項13に記載の方法。
【請求項15】
グラフィカルインタフェースに前記地図を表示するステップをさらに含むことを特徴とする請求項14に記載の方法。
【請求項16】
前記地図によって規定された領域内にある全ての既知ノードの位置を維持管理するステップと、
前記領域内にある物体を検出するステップと、
前記物体が前記領域内の既知のノードではない場合に、警報を発するステップと、
をさらに含むことを特徴とする請求項15に記載の方法。
【請求項17】
無線メッシュネットワーク内の2つ以上の位置にノードを配置するステップと、
各位置に関し、前記ノードの位置情報を測定するステップと、
前記ノードと、前記無線メッシュネットワークに設置された複数のノードとの間でカウント校正乗数を取り交わすステップと、
飛行時間測定法及び前記カウント校正乗数を使用して、前記複数のノードから各位置の前記ノードまでの第1の複数の距離を測定するステップと、
前記第1の複数の距離と、各位置のノードに関する位置情報とをネットワークマネージャに送信するステップと、
前記ネットワークマネージャによって、前記第1の複数の距離と、各位置の位置情報とを蓄積するステップと、
を含むことを特徴とする無線メッシュネットワーク内のノードを探知する方法。
【請求項18】
前記ネットワークマネージャによって、前記第1の複数の距離と、各位置の位置情報とを蓄積するステップは、前記第1の複数の距離をフィルタリングして固定ノードに関連する距離だけを蓄積するステップをさらに有することを特徴とする請求項17に記載の方法。
【請求項19】
前記ネットワークマネージャによって、前記第1の複数の距離と、各位置の位置情報とを蓄積するステップは、前記第1の複数の距離を予め蓄積された複数の距離の一群と比較し、前記予め蓄積された複数の距離の一群の標準偏差内にある距離だけを蓄積するステップをさらに有することを特徴とする請求項17に記載の方法。
【請求項20】
前記第1の複数の距離と、各位置のノードに関する位置情報とをネットワークマネージャに送信するステップは、前記第1の複数の距離をフィルタリングし、固定ノードに関連する距離だけを送信するステップをさらに備えることを特徴とする請求項17に記載の方法。
【請求項21】
前記複数のノードの少なくとも1つはロケータビーコンであることを特徴とする請求項17に記載の方法。
【請求項22】
前記ノードはモバイルノードであることを特徴とする請求項17に記載の方法。
【請求項23】
前記複数のノードから各位置の前記ノードまでの第1の複数の距離を測定するステップは、飛行時間測定法及びカウント校正乗数を使用して前記第1の複数の距離を演算するステップを有することを特徴とする請求項17に記載の方法。
【請求項24】
各位置の前記ノードに関する位置情報を測定するステップは、前記ノードの位置のGPS測定結果を取得するステップをさらに有することを特徴とする請求項17に記載の方法。
【請求項25】
各位置の前記ノードに関する位置情報を測定するステップは、前記無線メッシュネットワークの近傍に設置されたGPS中継器を使用してGPS測定結果の信号強度を強めるステップをさらに有することを特徴とする請求項24に記載の方法。
【請求項26】
前記無線メッシュネットワーク内に前記ノードを配置するステップと、
前記無線メッシュネットワークに設置された前記複数のノードから前記ノードまでの第2の複数の距離を測定するステップと、
前記第2の複数の距離を前記ネットワークマネージャに送信するステップと、
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記ノードの位置を特定するステップと、
をさらに含むことを特徴とする請求項17に記載の方法。
【請求項27】
前記無線メッシュネットワークに第2のノードを配置するステップと、
前記無線メッシュネットワークに設置された前記複数のノードから前記第2のノードまでの第2の複数の距離を測定するステップと、
前記第2の複数の距離を前記ネットワークマネージャに送信するステップと、
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記第2のノードの位置を特定するステップと、
をさらに含むことを特徴とする請求項17に記載の方法。
【請求項28】
前記無線メッシュネットワークに設置された前記複数のノードから前記第2のノードまでの前記第2の複数の距離を測定するステップは、飛行時間測定法及びカウント校正乗数を使用して前記第2の複数の距離を演算するステップをさらに有することを特徴とする請求項27に記載の方法。
【請求項29】
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記第2のノードの位置を特定するステップは、前記第2の複数の距離に基づく領域を三角測量し、蓄積された前記第1の複数の距離及び蓄積された前記位置情報で前記領域内にあるものだけを検索するステップをさらに有することを特徴とする請求項27に記載の方法。
【請求項30】
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記第2のノードの位置を特定するステップは、蓄積された前記第1の複数の距離と、蓄積された前記位置情報とを、最小自乗法を用いて検索するステップをさらに有することを特徴とする請求項27に記載の方法。
【請求項31】
前記第2の複数の距離、蓄積された前記第1の複数の距離、及び蓄積された前記位置情報に基づいて前記第2のノードの位置を特定するステップは、蓄積された前記第1の複数の距離と、蓄積された前記位置情報とを、ニューラルネットワークアルゴリズムを用いて検索するステップをさらに有することを特徴とする請求項27に記載の方法。
【請求項32】
前記第2のノードの位置をグラフィックで表示するステップをさらに含むことを特徴とする請求項27に記載の方法。
【請求項33】
前記無線メッシュネットワークにある全ての既知ノードの位置の状態を維持管理するステップと、
前記無線メッシュネットワークの適用範囲の領域内にある物体の位置を検出するステップと、
前記物体の位置が前記無線メッシュネットワークの既知のノードでない場合には、警報を発するステップと、
をさらに含むことを特徴とする請求項27に記載の方法。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公表番号】特表2013−510307(P2013−510307A)
【公表日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願番号】特願2012−537854(P2012−537854)
【出願日】平成22年11月4日(2010.11.4)
【国際出願番号】PCT/US2010/002894
【国際公開番号】WO2011/056218
【国際公開日】平成23年5月12日(2011.5.12)
【出願人】(597115727)ローズマウント インコーポレイテッド (240)
【Fターム(参考)】
【公表日】平成25年3月21日(2013.3.21)
【国際特許分類】
【出願日】平成22年11月4日(2010.11.4)
【国際出願番号】PCT/US2010/002894
【国際公開番号】WO2011/056218
【国際公開日】平成23年5月12日(2011.5.12)
【出願人】(597115727)ローズマウント インコーポレイテッド (240)
【Fターム(参考)】
[ Back to top ]