
無線ネットワークのための制御装置
【課題】高優先度のフローに対する低優先度フローの干渉を最小限にするように低優先度フローを制御し高優先度のフローのスループットを向上させる。
【解決手段】複数の無線局を備え、各無線局間で異なる優先度を有する複数のパケットフローを用いて発信元無線局から宛先無線局に対してパケット信号を伝送することによりパケット無線通信を行う。低優先度フローの発信元無線局は当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)と、所定の期間内に受信された自局で伝送しない他の高優先度のフローの数(HPF)を計数してなるHPFテーブル内の他の高優先度のフローの数(HPF)とに基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信する。
【解決手段】複数の無線局を備え、各無線局間で異なる優先度を有する複数のパケットフローを用いて発信元無線局から宛先無線局に対してパケット信号を伝送することによりパケット無線通信を行う。低優先度フローの発信元無線局は当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)と、所定の期間内に受信された自局で伝送しない他の高優先度のフローの数(HPF)を計数してなるHPFテーブル内の他の高優先度のフローの数(HPF)とに基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数のノード無線局を備えた、例えば無線LANなどの無線ネットワークにおいてパケット通信を行う、例えばアドホック無線ネットワークなどの無線ネットワークのための制御装置に関する。
【背景技術】
【0002】
無線通信システム及びパーソナルコンピュータの最近の進歩に伴い、移動体ルータとして動作する複数のノード無線局からなり、迅速に配置可能なインフラストラクチャなしのネットワークであることが想定されたアドホック無線ネットワークが研究されている。このアドホック無線ネットワークにおいて、最近、モバイルアドホックネットワークにおけるQoSを提供する課題に対して様々な解決方法が提案されている(非特許文献1及び2を参照。)。
【0003】
【特許文献1】特開2001−244983号公報。
【特許文献2】特開2001−024431号公報。
【非特許文献1】Kui Wu et al., “QoS Support in Mobile Ad hoc Networks”, Crossing Boundaries an interdisciplinary journal, Vol.1, No.1, Fall 2001。
【非特許文献2】Satyabrata Chakrabarti et al., “QoS issues in Ad Hoc Wireless Networks”, IEEE Communications Magazine, Vol.39, No.2, pp.142-148, February 2001。
【非特許文献3】X. Pallot et al., “Implementing Message Priority Policies over an 802.11 Based Mobile Ad Hoc Network”, Proceedings of MILCOM 2001, Washington, U.S.A., October 2001。
【非特許文献4】Kolarov et al., “A control theoretic approach to the design of close loop rate based flow control for high speed ATM networks”, Proceedings of IEEE INFOCOM'97, pp.293-300, April 1997。
【非特許文献5】S. Keshav, “A control-theoretic approach to flow control”, Proceedings of ACM SIGCOMM'91, pp.3-15, Zurich, Switzerland, September 1991。
【非特許文献6】C. R. Kalmanek et al., “Rate Controlled Servers for Very High Speed Networks”, Proceedings of Globecom 1990, 300.3.1-300.3.9, December 1990。
【非特許文献7】L. Benmohamed et al., “Feedback Control of Congestion in Packet Switching Networks: The Case of a Single Congested Node”, IEEE/ACM Transactions on Networking, Vol.1, No.6, pp.693-707, 1993。
【非特許文献8】Siuli Roy et al., “A Network-Aware MAC and Routing Protocol for Effective Load Balancing in Ad Hoc Wireless Networks with Directional Antenna”, Proceedings of ACM MobiHoc 2003, Maryland, U.S.A., 1-3 June 2003。
【非特許文献9】Thyagarajan Nandagopal et al., “Service differentiation through end-to-end rate control in low bandwidth wireless packet networks”, Proceedings of the 6th International Workshop on Mobile Multimedia Communications, San Diego, California, U.S.A., November 1999。
【非特許文献10】Seung-Seok Kang et al., “Provisioning Service Differentiation in Ad Hoc Networks by the Modification of Back off Algorithm”, International Conference on Computer Communication and Network (ICCCN) 2001, Scottsdale, Arizona, U.S.A., October 2001。
【非特許文献11】S. Mangold et al., “IEEE 802.11e Wireless LAN for Quality of Service”, (invited paper), Proceedings of the European Wireless 2002, Florence, Italy, February 2002。
【非特許文献12】Xue Yang et al., “Priority Scheduling in Wireless Ad Hoc Networks”, ACM International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc), June 2002。
【非特許文献13】Vance J. VanDoren, “Understanding PID Control: Familiar examples show how and why proportional-integral-derivative controllers behave the way they do”, Control Engineering, http://www.controleng.com, June 1, 2000。
【非特許文献14】Minorsky, “Directional Stability of automatically steered bodies”, Journal of American Social of Naval Engineering, Vol. 34, pp.284, 1922。
【非特許文献15】G. F. Franklin et al., “Feedback Control of Dynamic Systems”, Addison-Wesley, Singapore, 1988。
【非特許文献16】Tetsuro Ueda et al., “A Rotational Sector-based, Receiver-Oriented Mechanism for Location Tracking and Medium Access Control in Ad Hoc Networks Using Directional Antenna”, Proceedings of the IFIP conference on Personal Wireless Communications PWC 2003, Venice, Italy, September 23-25, 2003。
【非特許文献17】T. Ueda et al., “Evaluating the Performance of Wireless Ad Hoc Network Testbed Smart Antenna”, Fourth IEEE Conference on Mobile and Wireless Communication Networks (MWCN2002), September 2002。
【非特許文献18】QualNet Simulator Version 3.1, Scalable Network Technologies, http://www.scalable-networks.com, accessible on June 11, 2004。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、非特許文献3で指摘されているように、移動体の無線チャンネルは帯域幅が限定されていて、トラフィックのあらゆるクラスに対して同じQoSを与えることができない。従って、あるクラスに他のクラスを上回る優先度を割り当てることによって、各クラスに異なるQoSを提供するための何らかの手段を実装する必要がある。有線環境に対してはいくつかの解決方法がすでに存在するが、これらの解決方法は、アドホック無線ネットワークにおいては、共用された通信環境とホストの移動性とに起因してうまく機能しない。
【0005】
何人かの研究者らは、ネットワーク内の輻輳を制御し、フローに基づくエンド・ツー・エンドのQoSを提供しかつ公平性の問題に対処するために、有線ネットワークにおいてフローレートを制御するための制御理論的アプローチの考案について探究している(非特許文献4乃至7を参照)。非特許文献4では、利用可能なビットレートサービスをサポートするコントローラを設計するために使用可能な制御機構が提案され、ここでは、ユーザは、フローレートをフィードバックして分散されたコントローラのセットを調整することにより、利用可能な帯域幅を公平にかつ動的に共用することができる。非特許文献5では、予約なしのネットワークにおけるトランスポート接続を制御するために使用可能な制御理論的アプローチを提示している。これらのフローレート制御方式は、ネットワーク内に存在する複数のフローがその時刻におけるネットワークの状態に依存して利用可能な帯域幅を等しく共用することを可能にするフィードバック制御機構を使用している。しかしながらこれらの方式は、いくつかのフローを他のフローよりも優先するという、優先度に基づいたサービスの問題をまったく取り扱っていない。さらに、これらの文献で調査されているものは有線ネットワーク環境である。
【0006】
アドホック無線ネットワークにおける2つのフローのルートが共通のノード無線局を共用するとき、もしくは互いに干渉し合うほど十分に近接しているときには、互いに影響し合い、ルートカップリングを生じさせる(非特許文献8を参照)。この場合、これら2つのルート内の複数のノード無線局は、それらのルートによって共用される媒体に対してアクセスするために常に競合するであろう。このような状況においては、低優先度フローのフローレートが減少されると、高優先度フローは、共用する媒体へアクセスする多くの機会を得ることになり、結果として輻輳は減少し、高優先度フローのスループットが向上する。このように、優先度に基づくフローレート制御は、異なるクラスのフローに対してサービスの差別化を提供する効果的な手段である。
【0007】
研究者の中には、サービスの差別化を達成するために、トランスポート層にエンド・ツー・エンドのフローレート制御を導入した者もいる(非特許文献9を参照)。しかしながら、これらの方式では、高優先度のトラフィックに対して所望のレートを保証することができない。フローのレート制御を用いたサービスの差別化に関する非特許文献9の研究は、個別化されたフローレート制御に焦点を合わせている。この場合、フローは、エンド・ツー・エンドのフィードバックに基づいたレートベクトルにより個別に制御され、高優先度フローのフローレートは低優先度フローのフローレートよりも緩やかに低下される。よって、高優先度フローのフローレートは向上するものの、所望のレベルのフローレートを保持できない可能性がある。
【0008】
また、サービスの差別化に関する他の既存のMAC層(メディアアクセスコントロール層)の解決方法として、非特許文献10乃至12に開示された技術が存在する。MANET(Mobile Ad Hoc Network)においては、MAC層内のトラフィックの優先度に従ってフレーム間隔(IFS)と競合窓(コンテンションウィンドウ:CW)のサイズとを変更しかつバックオフアルゴリズムを適宜修正することにより、QoSをサポートするいくつかの試みが行われている。しかしながら、これは、高優先度のパケットがデータ通信のための媒体に対する競合のないアクセスを常に獲得することを保証するものではない(非特許文献12を参照)。これらの方式では、媒体を求めて競合する多数の高優先度フローは、媒体に公平にアクセスすることの保証を必ずしも獲得できるわけではない。さらに、高優先度のトラフィックが存在しない場合の多数の低優先度のトラフィックは、大きい競合窓を選択する可能性があり、このことは媒体の不十分な利用に繋がる。上述の文献において取り組まれていないMAC層におけるQoSに係る他の重要な側面として、パケット伝送率がある。中間のノード無線局のMAC層における低優先度のパケットは、増大されたバックオフカウンタを選択していることがしばしば見出だされる場合があり、このカウンタ値は発信元無線局には未知のままであり、発信元無線局はそれでも非常に高いレートでパケットを注入し続けている可能性がある。その結果、低優先度フローのパケット信号を伝送する中間のノード無線局に非常に高いレートで到着するパケットは、MAC層によって迅速にサービスされることはなくキューメモリに格納されたままとなり、上記キューメモリはオーバーフローしてパケット廃棄をもたらす可能性がある。
【0009】
本発明の目的は以上の問題点を解決し、異なる複数の優先度のフローが存在するアドホック無線ネットワークにおいて、各フローの優先度に基づいて当該フローのQoSをサポートすることができ、これにより、高優先度のフローに対する低優先度フローの干渉を最小限にするように低優先度フローを制御し、高優先度のフローのスループットを向上させることができる無線ネットワークのための制御装置を提供することにある。
【課題を解決するための手段】
【0010】
本発明に係る無線ネットワークのための制御装置は、複数の無線局を備え、各無線局間で異なる優先度を有する複数のパケットフローを用いて発信元無線局から宛先無線局に対してパケット信号を伝送することによりパケット無線通信を行う無線ネットワークのための制御装置において、
各無線局は、発信元無線局から宛先無線局への低優先度フローである同一の各パケットフローについて、上記各パケットフローのパケット信号を受信したとき、当該パケットフローのパケット到着間隔(PAI)を計算してPAIテーブルとして記憶装置に記憶するとともに、所定の期間内に受信された自局で伝送しない他の高優先度のフローの数(HPF)を計数してHPFテーブルとして上記記憶装置に記憶し、
低優先度フローの無線信号を受信したパケットフローの発信元無線局以外の中継無線局は、上記PAIテーブルにおける当該パケットフローの最大のパケット到着間隔(PPAI)と、上記受信したパケットフローのパケット信号に含まれるパケットフローの最大のパケット到着間隔(PPAI)の少なくとも大きい値を有するパケット到着間隔(PPAI)及び上記他の高優先度のフローの数(HPF)を含むパケット信号を発信元無線局に向けて逆伝搬させて送信し、
高優先度フローの無線信号を受信したパケットフローの発信元無線局以外の中継無線局は、上記他の高優先度のフローの数(HPF)を含むパケット信号を発信元無線局に向けて逆伝搬させて送信し、
低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)と、上記HPFテーブル内の他の高優先度のフローの数(HPF)とに基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする。
【0011】
上記無線ネットワークのための制御装置において、低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)及び上記HPFテーブル内の他の高優先度のフローの数(HPF)から決定される設定値Rpとの誤差に基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする。
【0012】
また、上記無線ネットワークのための制御装置において、低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)及び上記HPFテーブル内の他の高優先度のフローの数(HPF)から決定される設定値Rpとの誤差に基づいて、当該誤差が最小となるように、比例積分及び微分制御(PID制御)方法を用いて、新しいパケット注入レート(PII)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする。
【0013】
さらに、無線ネットワークのための制御装置において、高優先度のフローの発信元無線局は、上記HPFテーブル内の他の高優先度のフローの数(HPF)に基づいて、当該高優先度フローのパケット注入レート(PIR)を決定し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする。
【発明の効果】
【0014】
従って、本発明によれば、異なる複数の優先度のフローが存在するアドホック無線ネットワークにおいて、各フローの優先度に基づいて当該フローのQoSをサポートすることができ、これにより、高優先度のフローに対する低優先度フローの干渉を最小限にするように低優先度フローを制御し、高優先度のフローのスループットを向上させることができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明に係る実施形態について図面を参照して説明する。
【0016】
本発明に係る実施形態においては、上述の問題点を解決し、無線媒体の十分な利用が適応型レート制御に従って達成されるように、高優先度フロー(高優先度を有するパケット信号を発信元無線局から宛先無線局に対して所定の無線媒体パスのフローを介して伝送するときのセッション接続のフローをいう。)を所望のレベルに保持しながら低優先度フロー(高優先度よりも低い優先度である低優先度を有するパケット信号を発信元無線局から宛先無線局に対して所定の無線媒体パスのフローを介して伝送するときのセッション接続のフローをいう。)を適応的に最大化することができる無線ネットワークのための制御装置を提供する。ここで、高優先度フローにこの望ましいサービスの差別化を提供するためには、高優先度フローとの干渉の原因である低優先度フローがそのルート上の各ノード無線局において高優先度フローのフローレートを検出してこれを測定し、最終的に制御理論的アプローチを使用して当該低優先度フローのフローレートを調整し、高優先度フローがその所望レベルに保持されるように制御するフローレート制御アルゴリズムが必要である。この検出及び測定は、発信元無線局から宛先無線局までのルーティングに関与する各ノード無線局のMAC層において行う必要がある。
【0017】
図1は、本発明に係る一実施形態の無線通信システムであるアドホック無線ネットワークの構成を示す複数のノード無線局1−1乃至1−9(総称して、符号1を付す。)の平面配置図であり、図2は、図1の各ノード無線局1の構成を示すブロック図である。
【0018】
この実施形態の無線通信システムは、例えば無線LANなどのアドホック無線ネットワークのパケット通信システムに適用するものであって、各ノード無線局1は、無指向性のオムニパターンと、所定の方位角幅を有するセクターパターンと、上記セクターパターンを回転しながら走査する回転セクターパターンとを少なくとも用いて放射パターンの制御を実行する可変ビームアンテナ101を備え、以下の処理を実行することを特徴としている。
(i)自局のサービスエリア内の各ノード無線局1に対してオムニパターンを用いてブロードキャストで自局IDを含むビーコン信号を送信する。
(ii)回転セクターパターンを用いて上記ビーコン信号を受信し、上記ビーコン信号の方位角と信号強度レベルとノード無線局ID(すなわち、送信局ID)を検出することにより、上記複数のノード無線局1のうちのサービスエリア内の各ノード無線局1に対する、方位角と信号強度レベルを方位角及び信号強度レベルテーブル(以下、ASテーブルという。なお、ASはAngle-Signal Strengthの略である。)としてデータベースメモリ154に記憶する。
(iii)パケット信号を宛先無線局に伝送するときに、当該ASテーブルにより示される方位角のセクターパターンを用いて当該宛先無線局に対してパケット信号を送信することにより、パケット信号をルーティングする。
(iv)従来技術に係るRTS(Request To Send)/CTS(Clear To Send)信号の基本的な通信手順をベースとして用い、図4(a)に示す信号フォーマットを有するRTSパケット信号(以下、RTS信号という。)と、図4(b)に示す信号フォーマットを有するCTSパケット信号(以下、CTS信号という。)とを用いて、図15乃至図19のパケット送受信制御処理を実行することにより、以下の信号処理を実行する。
(a)低優先度フローのRTS信号又はCTS信号を受信したとき、同一のパケットフローについてパケット到着間隔(Packet Arrival Interval:PAI)を計算してデータベースメモリ154内のPAIテーブルに記憶し(図16のステップS41)、自局が当該低優先度フローの発信元無線局であるときデータベースメモリ154内のPAIテーブルにおける当該フローのパケット信号を伝搬するノード無線局において検出される最大のパケット到着間隔(Detected Maximum Packet Arrival Interval:DMPAI)及びHPFテーブル(自局の所定の時間Ta内に受信した高優先度のフローの数(以下、HPFという。)を計数してデータベースメモリ154内の高優先度フローテーブルを、以下、HPFテーブルという。)内のHPFに基づいて、PID(Proportional Integral Derivative:比例積分及び微分)制御を用いたフローレート制御方法を用いて、当該フローのパケット注入レート又はパケット注入レート(Packet Injection Rate:PIR)を計算してパケット注入レートPIRを更新する(図16のステップS43)一方、自局が当該低優先度フローの発信元無線局でなくかつ中継無線局であるときPAIテーブルにおいてDMPAIを伝搬されたPAI(Propagated Packet Arrival Interval:PPAI)として選択して当該PPAIを含むCTS信号を発信元無線局に向けて逆伝搬させる(図16のステップS44)。
(b)高優先度のフローのRTS信号又はCTS信号を受信しかつ自局が低優先度フローを伝送しないノード無線局であるとき、受信したRTS信号又はCTS信号に基づいて、所定の時間Ta内に受信した高優先度のフローの数であるHPFを計数してデータベースメモリ154内のHPFテーブルに格納して更新し(図17のステップS51)、
(b1)自局が高優先度のフローの発信元無線局でなく中継無線局であるとき上記HPFを含む高優先度のフローのCTS信号を発信元無線局に向けて逆伝搬させる(図17のステップS54)一方、
(b2)自局が高優先度のフローの発信元無線局であるとき自局のHPFテーブル内のHPFに基づいて自局が発信する高優先度のフローの無線信号のパケット注入レートPIRの設定値Rpを決定し、決定された設定値Rpに基づいて自局が発信する高優先度のフローの無線信号のパケット注入レートPIRを設定し、上記設定された無線信号の注入レートPIRに基づいて自局が発信する高優先度のフローの無線信号を制御し(図17のステップS53)、
(c)高優先度のフローのRTS信号又はCTS信号を受信しかつ自局が低優先度フローを伝送するノード無線局であるとき、受信したRTS信号又はCTS信号の時刻に基づいて、同一のパケットフローについてパケット到着間隔PAIを計算してPAIテーブルに格納し、受信した信号内のHPFを高優先度のフローのIDに対応してHPFテーブルに格納した後、
(c1)自局が低優先度フローの発信元無線局であるとき、PAIテーブルにおける当該フローのパケット信号を伝搬するノード無線局において検出される最大のパケット到着間隔DMPAIに基づいて、PID制御を用いたフローレート制御方法を用いて、当該低優先度フローのパケット注入レートPIRを計算して更新し、上記設定された無線信号の注入レートPIRに基づいて自局が発信する低優先度フローの無線信号を制御する(図16のステップS37)一方、
(c2)自局が低優先度フローの発信元無線局でなく中継無線局であるときに低優先度フローのCTS信号を受信したとき自局のPAIテーブルにおいてDMPAIを伝搬されたPAI(PPAI)として選択して当該PPAI及び受信されたCTS信号内の伝搬されたHPF(Propagated High Priority Flow:PHPF)を含むCTS信号を発信元無線局に向けて逆伝搬させる(図16のステップS39)。
(c3)また、自局が低優先度フローの発信元無線局でなく中継無線局であるときに低優先度フローのCTS信号を受信しないとき自局のHPFテーブルと受信されたCTS信号内のHPFとの平均値を、新しいPHPFとして更新し、このときに、自局が高優先度のフローの発信元無線局でなく中継無線局であるとき上記新しいPHPFを含む高優先度のフローのCTS信号を発信元無線局に向けて逆伝搬させる(図18のステップS59)一方、自局が高優先度のフローの発信元無線局であるとき上記新しいPHPFに基づいて自局が発信する高優先度のフローの無線信号の注入レートPIRの設定値Rpを決定し、決定された設定値Rpに基づいて自局が発信する高優先度のフローの無線信号の注入レートPIRを設定し、上記設定された無線信号の注入レートPIRに基づいて自局が発信する高優先度のフローの無線信号を制御する(図18のステップS58)。
【0019】
この実施形態の無線通信システムでは、図1に示すように、複数のノード無線局1が平面的に散在して存在し、各ノード無線局1はそれぞれ、可変ビームアンテナ101の利得や送信電力、受信感度などのパラメータで決定される所定のサービスエリアを有し、このサービスエリア内でパケット通信を行うことができ、サービスエリア外のノード無線局1とパケット通信を行うときは、サービスエリア内のノード無線局1を中継局として用いてパケットデータを中継することにより、所望の宛先無線局1にパケットデータを伝送する。すなわち、各ノード無線局1は、パケットのルーティングを行うルータ装置を備え、発信端末、中継局、又は宛先端末として動作する。
【0020】
次いで、図2を参照して、各ノード無線局1の装置構成について説明する。図2において、ノード無線局1は、可変ビームアンテナ101と、その指向性を制御するための放射パターン制御部103と、サーキュレータ102と、データパケット送信部140及びデータパケット受信部130を有するデータパケット送受信部104と、トラヒックモニタ部105と、回線制御部106と、上位レイヤ処理部107とを備える。
【0021】
送受信すべきデータを処理する上位レイヤ処理装置107に従って発生されたパケット形式の通信用送信信号データは、送信バッファメモリ142を介して変調器143に入力され、変調器143は、所定の無線周波数の搬送波信号を、拡散符号発生器160でCDMA方式で発生された所定の通信チャンネル用拡散符号を用いて、入力された通信用送信信号データに従ってスペクトル拡散変調して、変調後の送信信号を高周波送信機144に出力する。高周波送信機144は入力された送信信号に対して増幅などの処理を実行した後、サーキュレータ102を介して可変ビームアンテナ101から他のノード無線局1に向けて送信する。一方、可変ビームアンテナ101で受信されたパケット形式の通信チャンネル用受信信号は、サーキュレータ102を介して高周波受信機131に入力され、高周波受信機131は入力された受信信号に対して低雑音増幅などの処理を実行した後、復調器132に出力する。復調器132は、入力される受信信号を、拡散符号発生器160でCDMA方式で発生された通信チャンネル用拡散符号を用いて、スペクトル逆拡散により復調して、復調後の受信信号データを受信バッファメモリ133を介して上位レイヤ処理装置107に出力するとともに、トラヒックモニタのためにトラヒックモニタ部105に出力する。
【0022】
本実施形態においては、可変指向性アンテナである可変ビームアンテナ101は、複数のアンテナ素子とその指向性を制御する放射パターン制御部103から構成されるものであって、より具体的には、無線信号が給電される給電素子と、この給電素子から所定の間隔だけ離れて設けられ、無線信号が給電されない複数個の非給電素子と、これら各非給電素子に接続された可変リアクタンス素子とから成るアレーアンテナを備え、上記各可変リアクタンス素子のリアクタンス値を変化させることにより、上記アレーアンテナの指向特性を変化させる、特許文献2において開示された、いわゆる電子制御導波器アレーアンテナ装置を用いることができる。本実施形態においては、可変ビームアンテナ101は、例えば所定のビーム幅を有するメインビームの方向を、所定の走査間隔で電気的な制御により変更可能であり、以下の放射パターンを選択的に設定して動作する。
【0023】
(i)無指向性のオムニパターン。
(ii)所定の方位角幅を有するセクターパターン。
(iii)上記セクターパターンを所定の方位角(例えば30度)毎に回転しながら走査する回転セクターパターン。
(iv)例えば、公知の最急勾配法などの適応制御方法を用いて可変ビームアンテナ101の主ビームを所望波の方向に向けかつ干渉波の方向にヌルを向ける適応制御パターン。
【0024】
なお、可変ビームアンテナ101については、例えば、公知のフェーズドアレーアンテナ装置であってもよい。
【0025】
トラヒックモニタ部105は、検索エンジン152と、更新エンジン153と、データベースメモリ154とを備え、後述のパケット送受信制御処理を実行するとともに、ノード無線局1が他のノード無線局1とのパケット通信において使用すべき通信チャンネルを決定して、決定した通信チャンネルに対応する拡散符号の指定データを回線制御部106を介して拡散符号発生器160に送ることにより、拡散符号発生器160が当該指定データに対応する拡散符号を発生するように制御するとともに、決定した通信チャンネルに対応するタイムスロットの指定データを回線制御部106を介して送信タイミング制御部141に送ることにより、送信タイミング制御部141が送信バッファメモリ142による通信チャンネル用送信信号データの書き込み及び読み出しを制御することにより通信チャンネル用送信信号が対応するタイムスロットで送信されるように制御する。
【0026】
トラヒックモニタ部105の検索エンジン152は、管理制御部151の制御によりデータベースメモリ154内のデータを検索して検索したデータを管理制御部151に返信する。また、更新エンジン153は、管理制御部151の制御によりデータベースメモリ154内のデータを更新する。さらに、データベースメモリ154には、方位角及び信号強度レベルテーブル(ASテーブル)、パケット到着間隔テーブル(PAIテーブル)及び高優先度フローテーブル(HPFテーブル)を記憶する。
【0027】
データベースメモリ154に格納されたASテーブルは、図10に示すように、自局のサービスエリア内の隣接ノード無線局毎に、方位角と、信号強度レベルの情報を格納し、後述するパケット送受信制御処理により作成更新される。また、データベースメモリ154に格納されたHPFテーブルは、図11に示すように、高優先度フローの通信ID毎に近傍のノード無線局により伝送される他の高優先度フローの数HPFを格納する。データベースメモリ154に格納されたPAIテーブルは、図12に示すように、無線局1において定義された各方位角に対する、各高優先度フローのパケット到着間隔PAIを格納する。
【0028】
本実施形態のアドホック無線ネットワークはパケット通信システムであり、このパケット通信システムで用いるパケットデータは、図3に示す一般的な形式のフォーマットを有する。すなわち、パケットデータは、宛先のIDと、パケット種別(ビーコン、RTS、CTS、DATA、ACKなど)と、自局のIDと、データ(上位レイヤでのデータなどを含む)とを含む。なお、本実施形態では、図4(a)に示すような特殊なフォーマット形式のRTS信号と、図4(b)に示すような特殊なフォーマット形式のCTS信号を使用する。
【0029】
RTS信号は、図4(a)に示すように、宛先無線局IDフィールド、パケット種別フィールド、発信元無線局IDフィールド、通信IDフィールド、優先度レベルフィールド、HPFフィールド、伝送すべきデータのフィールドを含む。ここで、通信IDフィールドは、そのパケットが帰属するフローの通信IDを示すために付加され、優先度レベルフィールドは、そのパケットが帰属するフローの優先度レベル(すなわち、高優先度フロー又は低優先度フロー)を示すために付加されている。RTS信号における通信IDフィールド及び優先度レベルフィールドは、進行中の通信の優先度レベルを近傍のノード無線局に通知させるために必要とされる。また、HPFフィールドは、近傍無線局における他の高優先度フローの数HPFを示す。
【0030】
CTS信号は、図4(b)に示すように、当該信号が高優先度フローのCTS信号である場合には、宛先無線局IDフィールド、パケット種別フィールド、発信元無線局IDフィールド、通信IDフィールド、優先度レベルフィールド(高優先度フロー又は低優先度フロー)、HPFフィールド、PHPFフィールド、伝送すべきデータのフィールドを含む。CTS信号における通信IDフィールド及び優先度レベルフィールドは、RTS信号の場合と同様に、進行中の通信の優先度レベルを近傍のノード無線局に通知させるために必要とされる。また、CTS信号が低優先度フローのCTS信号である場合には、PPAIフィールドをさらに含む。PPAIフィールドは、その近傍における高優先度の通信の最大パケット到着間隔を示す。1つの低優先度フローの近傍に2つ以上の高優先度フローが存在する場合でも、高優先度フローの最大パケット到着間隔の逆伝搬が行われる。これは、高優先度フローが媒体にアクセスする最大の機会を得ることができてかつその期待されるパケット到着間隔が保持されるように、低優先度フローがそれ自体を繰り返し適応的に調整できることを示している。これらRTS信号やCTS信号の送受信処理については詳細後述する。
【0031】
次いで、本実施形態のアドホック無線ネットワークで用いるMAC通信プロトコルについて以下に説明する。本実施形態に係るアドホック無線ネットワークにおいて、互いに無線通信を行う1組のノード無線局1は二次元的な閉鎖空間内を動き回り、共通の無線通信チャンネルを共有するものと仮定する。各ノード無線局1は、上述の4個の放射パターンを有する、例えば電子制御導波器アレーアンテナ装置である可変ビームアンテナ101を備える。各ノード無線局1は一度に送信又は受信の何れかを実行可能であるが、1つのノード無線局1で複数の送受信を行うことはできない。
【0032】
IEEE802.11のMACプロトコル基準では、RTS/CTS/DATA/ACKアクセス制御方式を用いて、高信頼性のデータ通信が保証されているが、本実施形態の方法では、このアクセス制御方式をベースとして、ASテーブルを形成するためのフェーズが追加の命令信号や応答信号と共に加えられる。従って、データ通信は周期的な、ASテーブル生成フェーズの合間に実行される。また、各フレームにはトレーニングシーケンスが追加されて送受信アンテナによるそのビーム及びヌルの制御及び適応制御モードへの移行が可能にされる。
【0033】
図13は、本実施形態に係る4方向ハンドシェイクのアンテナモードの使用例を示している。適応制御パターンは移動中の端末を追跡することはできるが、ビーム及びヌルはパケット信号が受信されなければ形成され得ない。従って、RTS送信及びRTS/CTS受信における開始部分では、オムニパターンとセクターパターンが使用される。さらに、待ちノード無線局1は指向性RTS信号がどの方向から到着するかを認識しないため、回転セクターパターンが使用される。本実施形態に係るASテーブルの場合のRTS信号の送信時間は、特許文献1において開示された従来技術のMACプロトコルで用いるSINRテーブルにおけるRTS信号の送信時間の2倍であることに注意を要する。また、RTS信号の送信及びCTS信号の受信におけるセクターパターンのビームの方向は、図10のASテーブルから得ることができる。
【0034】
次いで、図1のアドホック無線ネットワークにおいて用いられる各ノード無線局での放射パターンの種類と無線通信プロトコルを示すタイミングチャートである図13の制御パターンについて以下に詳細に説明する。まず、送信元ノード無線局はASテーブルにより示される宛先無線局にビームを向けるセクターパターンを用いて当該宛先無線局に対してRTS信号を送信する一方、宛先無線局は回転セクターパターンを用いてRTS信号を受信し、上記RTS信号内のノード無線局IDを検出したときは、当該送信元ノード無線局のノード無線局IDに基づいて方位角及び信号強度レベルテーブルにより示される当該送信元ノード無線局にビームを向けるセクターパターンを介して適応制御パターンに変更してRTS信号を受信する。次いで、宛先無線局は、引き続き上記適応制御パターンを用いてCTS信号を送信元ノード無線局に送信する一方、送信元ノード無線局は上記セクターパターンから上記適応制御パターンに変更してCTS信号を受信することにより、宛先無線局との無線リンクを確立する。その後、送信元ノード無線局及び宛先無線局はともに上記適応制御パターンを用いてデータ信号及びACK信号の送受信を実行する。すなわち、送信元ノード無線局は適応制御パターンを用いてデータ信号を送信する一方、宛先無線局は送信されたデータ信号を適応制御パターンを用いて受信する。次いで、宛先無線局は、データ信号を受信したことの確認信号としてACK信号を適応制御パターンを用いて送信元ノード無線局に対して送信し、一方、送信元ノード無線局はこのACK信号を適応制御パターンを用いて受信する。
【0035】
図13に図示する本実施形態に係る制御パターンにおいては、RTS信号の受信から、セクターパターンから適応制御パターンに変更したアンテナの放射パターンを、宛先無線局及び送信元ノード無線局において用いているが、適応制御パターンを用いず、セクターパターンのみを用いるようにしてもよい。
【0036】
本実施形態に係る図10のASテーブルを使用する提案されたMACプロトコルにおいては、各ノード無線局1は下記のステップを周期的に実行する。
【0037】
(i)隣接ノード無線局1−i,1−j,1−kを有するノード無線局1−nは、常に回転セクターパターンを用いた受信モードで待機している。回転セクターパターンでは、ノード無線局1−nはその可変ビームアンテナ101を制御し、各方向において受信される信号を全方向における順次方向性受信の形式で検出する。本実施形態においては、30度のビーム幅を有しかつ水平面内で互いに隣接した12個のセクターパターンを順次に用いて、360度の方位角をすべて走査する。
(ii)無線チャンネルが空いている場合はいつでも、各ノード無線局1はオムニパターンを用いてビーコン信号をその近傍のノード無線局に対して送信する。提案されたこのMACプロトコルの方法においては、図14が示すように2つのパケット信号がビーコンとして順次送信される。ビーコンの第1のパケット信号は、回転セクターパターンにおける受信するノード無線局によるビーコン信号が送信中であるか否かの検出において一助となる。次いで、受信機がビーコンの第2のパケット信号を受信し、復号化する。ビーコンの第2のパケット信号は、ノード無線局IDを含んでいる。ここで、全12方向を回転する時間は、1つのパケット信号の持続時間よりも短く設定する必要がある。
(iii)回転セクターパターンでは、ノード無線局1−iがその回転の間に1つの回転セクターパターンにおいて他のノード無線局1−nからのビーコンの第1のパケットを検出すると、ノード無線局1−iはその検出されたセクターパターンにおいて回転を停止し、ノード無線局1−iからのビーコンの第2のパケットを受信する。第2のパケットの信号強度レベルが測定され、ノード無線局1−iのノード無線局IDが復号されると、検出されたセクターパターンの方位角がそのビーコン信号を送信した隣接ノード無線局1−iの方位角になる。
(iv)ノード無線局1−nは、ノード無線局1−nのASテーブルのノード無線局1−iのエントリにこれら検出された情報の書込みをする。図10において、方位角ANGLEn,i(t)は、その時刻tにおける受信されたセクターパターンのノード無線局1−iからノード無線局1−nへの方向の方位角であり、SIGNALn,i(t)はノード無線局1−nのそのセクターパターンにおけるノード無線局1−iから受信された信号レベルである。
(v)ノード無線局1−nは、ノード無線局1−i,1−j,1−kから順次ビーコン信号を受信することにより、ノード無線局1−nのASテーブルのノード無線局1−i,1−j,1−kのエントリ全体を累積して更新格納する。
【0038】
ところで、特許文献1に係る従来技術のプロトコルでは、任意のノード無線局1−nがセットアップ信号を送信してそれに基づくSINRテーブルの形成を開始する。ここで、送信機のための方位角は必ず受信機用の方位角とは異なるため、ノード無線局1−nからの方向の同報通信を行わない(例えば12個のRQパケット信号なしの)受信ノード無線局における回転セクターパターンによる方位角予測は適当でない。従って、方位角情報による12個のRQパケット信号だけでなく、REパケット信号によるセットアップパケット信号及び12個のRQパケット信号の受信機からの方位角情報の変換を使用することも必要である。また、あらゆる周辺ノード無線局から多くのセットアップパケット信号と12個のRQパケット信号を受信する各ノード無線局は、REパケット信号を介してすべての隣接ノード無線局にそれぞれ応答しなければならないという問題点を有していた。
【0039】
これに対して、本実施形態のアドホック無線ネットワークにおいて使用されるMAC通信プロトコルでは、各ASテーブルはビーコンの受信ノード無線局において作成されるため、回転セクターパターンを受信モードとして使用して無指向性ビーコンの方位角予測を行うことが可能である。各ノード無線局における異なる送信電力の非対称性リンクの問題は、ビーコンに送信電力情報を追加することにより回避することができる。結果的に、12個のRQパケット信号やREパケット信号なしであってもわずか2つのパケット信号をビーコン信号として送信すればよい。さらに、このビーコン信号はオムニパターンで送信されるために、各ノード無線局は近傍に向けてビーコン信号を一度だけ送信すれば足りる。つまり、各ノード無線局は、わずか1つのビーコン信号を送信するだけで隣接するすべてのノード無線局に受信された方位角を予測させることが可能であり、隣接ノード無線局の数だけビーコン信号を送信する必要はない。
【0040】
さらに、提案された本実施形態に係るMACプロトコルでは、各ノード無線局が隣接ノード無線局の方位角を予測する際にSINRではなく信号強度レベルをリンク品質のパラメータとして使用するために、本実施形態に係るMACプロトコルは、特許文献1に開示された従来技術のプロトコルにおける方位角毎のSINRテーブルにおける干渉の問題を回避することができる。
【0041】
各ノード無線局からのビーコンのパケット信号は、同じ送信間隔で送信される。この場合は、各ノード無線局がビーコン信号の遷移タイミングをランダムに選ぶとしても、複数のビーコン信号が同時に送信されれば、その受信機側で発生する衝突により無指向性ビーコン信号の幾つかが失われる可能性もある。オムニパターンでの受信モードではビーコン信号は復号され得ないが、回転セクターパターンでは、複数のビーコン信号をセクターパターンで分割することができる点に注意することを必要とする。ここで、この衝突の確率は、各ノード無線局1が送信間隔を選択することに従ってより低く抑えることができる。例えば、当該無線ネットワークシステムにおける基準周期時間間隔tiに対する持続時刻tdのウィンドウからランダムなタイミングを選択することができる(td<ti)。
【0042】
次いで、本発明に係る実施形態のアドホック無線ネットワークにおいて用いるフローレート制御方式について、すなわち、パケット注入レートを制御することによってサービスを差別化する方法について以下に説明する。
【0043】
図5は、従来技術における問題点を示す図であって、オムニアンテナを用いたとき、ルートカップリングに起因して低優先度フロー(S2−D2)が高優先度フロー(S1−D1)を妨害する(又は2つのフローが競合する)場合を示す平面図であり、ここで、点線はオムニアンテナを用いたことに起因するノード無線局間の無線接続を示す。
【0044】
低優先度フローのルート上の各ノード無線局は高優先度フローのフローレートを検出してこれを測定するが、この検出及び測定は、発信元無線局から宛先無線局までのルーティングに関与する各ノード無線局のMAC層において行う必要がある。詳しくは、低優先度フローのパケット信号を伝送するノード無線局(例えば図5のノード無線局S2,N2,N3,D2)は、高優先度フローのパケット信号を伝送するノード無線局(例えば図5のノード無線局S1,N1,D1)からの連続的なRTS信号及び/又はCTS信号の受信間隔を記録することにより、低優先度フローのパケット信号を伝送するノード無線局の各近傍における高優先度フローのフローレートを測定できるようになる。例えば、図5の例では、ノード無線局N3は、高優先度フローのパケット信号を伝送するノード無線局N1からRTS信号を受信し、各時刻における高優先度フローのフローレートを測定することができる。測定されたフローレートの情報は、低優先度フローの発信元無線局であるノード無線局S2に逆伝搬され、ノード無線局S2は、高優先度フローのフローレートをその所望レベルに保持するために、計算により制御量を決定してそのパケット注入レートを適応的に調整する。
【0045】
例えば図5において、連続的な低優先度フローであるフロー「S2−N2−N3−D2」(又は、フロー「S2−D2」と表記する。)が存在したとする。このフローが単独で動作する場合、そのフローレートは予め定義された値に固定される。ここで、高優先度フローであるフロー「S1−N1−D1」(又は、フロー「S1−D1」と表記する。)が動作を開始する。この高優先度フローのフローレートを予め定義されたレベルに固定して保持することを所望していると仮定する。しかしながら、図5におけるこれらの2つのルートはルートカップリングを発生させるほど十分に近接しているため互いに干渉し合い、これにより、高優先度フローのフローレートは、低優先度フローとの間で干渉しているノード無線局N1及びD1において低下する。
【0046】
本実施形態に係るフローレート制御方式を構築する際における本発明者らの目的は、低優先度フローに属するノード無線局において、高優先度フローのフローレートの低下を検出し、かつ検出された低下についての情報を低優先度フローの発信元無線局へ逆伝搬して戻すことにあり、これにより、低優先度フローの発信元無線局は、低優先度フローのフローレートを適応的に低下させて、高優先度フローのフローレートをその予め定義された値に保持することができる。
【0047】
これを実行するに当たって、ノード無線局N3及びD2はともに、ノード無線局N1によって送信されるRTS信号とノード無線局D1によって送信されるCTS信号とから、高優先度フロー「S1−D1」の存在を検出する。高優先度フロー「S1−D1」が検出されたことは、この高優先度フローから遠く離れた、低優先度フローの発信元無線局S2には未知のままである。よって、ノード無線局D2は、CTS信号の援助により、高優先度フロー「S1−D1」が検出されたという情報をノード無線局N3に送信する。ノード無線局N3は、ノード無線局N2にCTS信号を送信しなければならない際に、それ自体が検出した高優先度のトラフィックについての情報と、ノード無線局D2から受信した情報(すなわち、ノード無線局D2において高優先度フロー「S1−D1」が検出されたという情報)とを結合し、フロー内の競合についての1つ又は複数の情報を重複的に考慮して、CTS信号を用いてこれをノード無線局N2に送信する。次に、ノード無線局N2は、CTS信号を用いて、ノード無線局N3から受信された情報とノード無線局N2において取得された情報とをノード無線局S2に送信して戻す。最後に、発信元無線局であるノード無線局S2は、フローの媒体における競合を考慮して、適応的にパケット注入レートを低下させるように決定する。ゆえに、媒体における高優先度フローとの競合についての情報は、余分なパケットの送信を必要とせずに、低優先度フローの発信元無線局S2へ送信され、この発信元無線局S2は低優先度フローのパケット注入レートを適応的に低下させる。以上のようなシステムによれば、媒体内に競合が存在しない場合には、低優先度フローであってもその予め定義されたフローレートで動作することができる。
【0048】
本実施形態では、高優先度フローが低優先度フローと競合する場合に、高優先度フローへのフローレートに関して特定レベルのサービス保証を達成しようとしている。このために、本願明細書では、オムニアンテナ(無指向性アンテナ)を使用するオーバーヘッドの極めて少ないプロトコルを用いたフローレート制御方式を提案し、次いで、全体のスループットが向上するように指向性アンテナを使用してこのフローレート制御方式を変形した実施形態を提案する。
【0049】
次に、本実施形態のアドホック無線ネットワークにおいて使用されるフローレート制御方式の原理として用いている、制御理論的アプローチについて説明する。なお、本願明細書において、数式がイメージ入力された墨付き括弧の数番号と、数式が文字入力された大括弧の数番号とを混在して用いており、また、当該明細書での一連の数式番号として「式(1)」の形式を用いて数式番号を式の最後部に付与して用いることとする。
【0050】
まず、本実施形態で使用されるフローレート制御方式に係る制御理論的アプローチである比例積分微分(PID)制御方式に関するいくつかの準備段階から説明する。
【0051】
図6は、基本的な帰還型コントローラ装置の構成を示すブロック図である。帰還型コントローラ装置を、測定可能なプロセス変数である出力信号Yを設定値として、周知の所望の設定値R(設定値信号)の方向へ駆動すべくプロセスに何らかの制御を働かせる制御信号の出力uを発生させるように設計する(図6)。帰還型コントローラ装置は、アクチュエータを使用してプロセスに作用し、センサを使用して結果を測定する。
【0052】
図6において、帰還型コントローラ装置は、減算器11tと、コントローラ12と、制御対象のプラント装置13とを備えて構成される。加算器11は入力される設定値信号Rから、プラント装置13から出力される出力信号Yを減算して、減算結果の信号であるトラッキング誤差信号eをコントローラ12に出力する。コントローラ12は、入力されるトラッキング誤差信号eに基づいて所定の制御方法を用いて制御するための制御信号uを発生してプラント装置13に出力する。プラント装置13は、入力される制御信号uに基づいてその動作が制御され、そのときのプラント装置13からの出力信号Yが減算器11に出力されるとともに、外部装置に出力される。
【0053】
以上説明したように、図6の帰還型コントローラにおいては、設定値信号(R)とプロセス変数である出力信号(Y)の測定値との誤差信号eを観察することによりその出力信号を決定する。誤差信号eは、プロセス上の外乱又は負荷がプロセス変数を変更すると発生するが、図6の帰還型コントローラ装置の役割は、この誤差信号eを自動的に排除して0にすることにある(例えば、非特許文献13参照。)。
【0054】
初期の帰還型制御装置は、その制御構成において明示的又は暗示的に比例積分及び微分(PID)制御の各動作の考案を使用した。ここで、PID制御を厳密に理論的に考察したのは、1922年に発表されたミノルスキー(Minorsky)による船舶操舵に関する現象研究であった(例えば、非特許文献14参照。)。PIDコントローラは、現代の産業プロセスにおいていまだ最も広範囲に使用されている制御構成である(例えば、非特許文献15参照。)。ここで、PID制御アルゴリズムの一般式は、次式で表される。
【0055】
【数1】

【0056】
ここで、変数(e)は、減算器11により計算され、所望の入力値である設定値信号(R)と実際の出力信号(Y)との差であるトラッキング誤差信号を表す。この誤差信号(e)はPIDコントローラ12に送られ、PIDコントローラ12はこの誤差信号eの導関数及び積分の双方を計算する。PIDコントローラ12を通過した直後の制御信号(u)は、この時点で、比例利得(Kp)×誤差信号の大きさ(e)+積分利得(Ki)×誤差信号(e)の積分+微分利得(Kd)×誤差信号(e)の導関数に等しい。
【0057】
比例利得(Kp)は、制御信号uの立ち上り時間を短縮する効果を有し、かつ定常状態の誤差を、完全に排除はしないものの低減させる。積分利得(Ki)は定常状態の誤差を排除する効果を有するが、過渡応答を悪化させる場合がある。微分利得(Kd)は、システムの安定度を高め、オーバーシュートを低減し、過渡応答を向上させる効果を有する。上記の式はPIDコントローラ12の連続表示の式であり、離散表示に変換されなければならない。これを行う方法は幾つか存在するが、一次有限差分を使用するものが最も簡単である。ここで、比例する誤差項も、やはり基準値と現在値との誤差を用いる。微分項及び積分項は、次式で置き換えできる。
【0058】
【数2】
【数3】
【0059】
ここで、wは積分制御のウィンドウである。従って、上記式の最終形式は、次式で表される。
【0060】
【数4】
【0061】
従って、所望の出力信号Yを計算するためには、現在の誤差、誤差合計及び誤差の最近の変化を求めることが必要になる。
【0062】
次に、以上説明したPID制御方式を図1のアドホック無線ネットワークに適用した場合の、優先度に基づいたフローレート制御方法について説明する。
【0063】
図7は、図6のフィードバックコントローラを図1のアドホック無線ネットワークに適用した場合の、優先度に基づいたフローレート制御装置を概略的に示すブロック図である。図7は、図1のアドホック無線ネットワークにおいて単一の高優先度フローと複数n個の低優先度フローとが存在する場合に、当該ネットワーク内の基本的なフローレート制御を1つのフローレート制御装置として概略的に示している。
【0064】
図7のフローレート制御装置は、高優先度フローの設定値信号Rpからフィードバック信号である出力信号Yを減算して、その減算結果であるトラッキング誤差信号eを出力する減算器20と、各低優先度フローL1,…,Lnの発信元無線局にそれぞれ設けられ、トラッキング誤差信号eの入力に基づいて、各低優先度フローL1,…,LnのフローレートをPID制御する低優先度フローコントローラLPC1,…,LPCnからなるフローコントローラ21と、1つの高優先度フローH及びn個の低優先度フローL1,…,Lnのパケット信号を伝送するネットワークにおけるフローシステム22と、各低優先度フローL1,…,Lnのパケット信号を伝送する無線局にそれぞれ設けられ、これら各低優先度フローL1,…,Lnのパケット信号と結合する高優先度フローHのフローレートを測定し、当該フローレートを逆伝搬させるシステム23とを備えている。従って、フローコントローラ21によってそれぞれ制御された各低優先度フローL1,…,Lnのフローレートが図6のコントローラ11の制御信号uに対応し、図7のフローシステム22からの出力信号が図6の出力信号Yに対応し、当該出力信号Yはシステム23により逆伝搬されて減算器20にフィードバックされる。
【0065】
図7の説明では、特に、無線ネットワーク内の単一の高優先度フローと複数n個の低優先度フローが互いにカップリングされる場合、すなわちこれらのフローのルートは(1つ又は複数の)共通のノード無線局を共用し、もしくは互いに干渉し合うほど十分に近接しているかの何れかである場合を仮定する。この場合、高優先度フローを所望のフローレートの設定値Rpに保持するために、各低優先度フローは、高優先度フローのフローレートの出力信号Yが可能な限り設定値Rpに近づくように、PID制御方式を用いて各低優先度フローの発信元無線局においてそのフローレートの制御信号uを適応的に変化させている。各低優先度フローは、高優先度フローを保護するために同様の制御方式を使用している。各低優先度フローLiのパケット信号を伝送するノード無線局は、高優先度フローとのカップリングが存在すれば、その高優先度フローのフローレートを測定して、測定値Miを取得する。この情報は、低優先度フローのパケット信号をそれぞれ発信した各発信元無線局SLに逆伝搬される。これにより、各低優先度フローLiの発信元無線局はフローレートYを決定し、PID制御方法を用いて当該制御処理が実行される。これに基づいて、各低優先度フローの発信元無線局は当該低優先度フローのフローレートを調整し、当該プロセスが反復される。
【0066】
上述した従来技術のPIDコントローラと、本発明に係る実施形態において用いられるフローレート制御方式との間には、重大な違いがあることは注目すべき点である。本実施形態において用いられるフローレート制御方式では、低優先度フローコントローラLPC1,…,LPCnの出力信号値u(すなわち低優先度フローのフローレート)をゼロに設定するとき、他に低優先度フローがまったく存在しなければ、高優先度フローのフローレートYはその所望のフローレートの設定値Rpに達することが容易に分かる。よって、高優先度フローのフローレートを所望の値に保持する課題だけに焦点が合わされていれば、この解決方法は従来的な意味でのコントローラをまったく必要としない。しかしながら、本実施形態に係るアドホック無線ネットワークにおける目的は、高優先度フローのフローレートの設定値RpHをその所望レベルに保持しつつ低優先度フローのフローレートの設定値RpLを最大化することにある。これは、最大−最小(max-min)フローレート制御に類似するものであり、この場合、本実施形態において用いられるフローレート制御方式は、高優先度フローのフローレートの設定値RpHをその所望値より低下させることなしに低優先度フローのフローレートの設定値RpLをさらに増加させることができなくなるような方法で、設定値RpLの値を動的に調整しかつ制御することにより、設定値RpHをその所望のレベルに保持する。この種の必要条件は従来のPID制御には存在せず、よって、本発明に係る実施形態のアプローチは従来技術のPID制御方法に対して新規性を有するものである。引き続き、これについて説明する。
【0067】
無線通信システム内に複数の高優先度フローが複数の低優先度フローとともに存在し、これらが互いにカップリングされている場合、単一の高優先度フローに割り当てられる所望のフローレートの設定値Rpはもはや有効ではない。これは、低優先度フローが存在しないときであっても、2つ以上の高優先度フローの間のカップリングにより、高優先度フローのすべてがそれらのフローレートを保持する余地がないからである。よって、複数の高優先度フローが互いにカップリングされる場合には、高優先度フローのための新たな設定値を動的に決定する必要がある。例えば、単一の高優先度フローが毎秒50パケットの保証されたフローレートで動作することを無線通信システムが許容しているとき、この同じシステムは、システム内に2つのカップリングされた高優先度フローが存在する場合に同一のフローレートを保証することはできない。この場合、各高優先度フローに保証されるフローレートは、例えば毎秒30パケットになる。そして他の低優先度フローは、この時点で、各高優先度フローに割り当てられた新たなフローレートを保護しようとする。
【0068】
分散環境において高優先度フローの設定値を動的に変化させるために、各高優先度フローは、その近傍における他の高優先度フローの存在をモニタリングする。高優先度フローH1がその近傍にもう1つの高優先度フローH2を検出し、これらの2つの高優先度フローが互いにカップリングされる可能性が生じる場合には、フローH1は、その設定値を、予め定義された値Rnew1に変化させる。ここで、R>Rnew1であり、単位はパケット/秒とする。同様に、高優先度フローH2も高優先度フローH1を検出し、同じくその設定値を値Rnew1に変化させる。
【0069】
また、高優先度フローH1がその近傍に2つの高優先度フローを検出すれば、高優先度フローH1は、その設定値を、予め定義された他の値Rnew2に変化させる。これらの設定値は、実験により予め定義される場合もあり、また最適な媒体利用のために適応的に計算されることも可能である。後述のシミュレーションでは、簡単化のために、設定値は実験で予め定義されていることを仮定している。
【0070】
高優先度フローH1のフローレートの設定値が値Rnew1又はRnew2に変更された後で、指定された時間期間にわたって高優先度フローH1がその近傍に他の高優先度フローの存在を何ら検出しなければ、高優先度フローH1のフローレートの設定値は元の値Rに戻される。
【0071】
低優先度フローはその近傍における高優先度フローのフローレートを測定し、さらに高優先度フローの設定値を取得する。低優先度フローは、これに応じてそのフローレートを調整し、最も弱い高優先度フローを保護する。本実施形態における「最も弱い高優先度フロー」とは、当該高優先度フローの設定値が値Rnewであるときに、最大の誤差信号値e=(Rnew−Y)を有するフローである。以上述べた低優先度フローの処理は、当然ながらその近傍における他の高優先度フローの保護を保証する。
【0072】
次に、指向性の可変ビームアンテナ101を使用するフローレート制御方式の実装について説明する。
【0073】
ここまでは、図5を参照し、近傍ノード無線局として、オムニアンテナを使用する無指向性のノード無線局が存在する場合について考察した。しかしながら、図2のように、指向性の可変ビームアンテナ101を用いたアドホック無線ネットワークに適応させるように、本実施形態に係るフローレート制御方式を変形するためには、指向性のMACと、その指向性の近傍ノード無線局とについて考察する必要がある。本発明者らは、非特許文献16及び17において、近傍ノード無線局のロケーションを追跡する能力のある、受信機が使用する回転セクタに基づく指向性MACプロトコルを実装した。従って、各ノード無線局1−nは、その近傍に位置しかつ指向性の可変ビームアンテナ101を備えたノード無線局1−mを認識し、この情報は各ノード無線局1−n内のデータベースメモリ154に格納された方位角及び信号強度テーブル(ASテーブル)に記録される。
【0074】
ある実施形態では、RTS信号及びCTS信号は無指向性のアンテナパターンを用いて送信されるのに対して、データパケット信号及びACKパケット信号は指向性のアンテナパターンを用いて送信される。アドホック無線ネットワークにおける指向性の可変ビームアンテナ101の使用により、無線干渉を大幅に低下させることが可能であり、従って、無線媒体の利用は向上する(非特許文献8、16及び17を参照)。指向性の可変ビームアンテナ101のこの特性は、本発明の実施形態に係るフローレート制御方式のプロトコルの効率を改善するために使用される。
【0075】
図8は以上のことを示し、本実施形態において、セクターパターンのアンテナパターンを可変ビームアンテナ101に設定して用いたとき、低優先度フロー(S2−D2)が高優先度フロー(S1−D1)と同時に存在することができることを示す平面図である。図8の状況では、図5の同時に存在する高優先度のトラフィック「S1−D1」及び低優先度のトラフィック「S2−D2」は、可変ビームアンテナ101を各ノード無線局S1,N1,D1,S2,N2,N3,D2に設けることによって、互いに妨害し合うことなく共存することが可能である。オムニアンテナを使用する場合(図5)、このことは不可能であろう。よって、指向性の可変ビームアンテナ101を用いた場合、低優先度のトラフィック「S2−D2」は、高優先度のトラフィック「S1−D1」が存在していても、当該トラフィック「S2−D2」のパケット注入レートを制御する必要がない。指向性の可変ビームアンテナ101を使用すれば、優先度レベルの異なる複数のトラフィックが近接して存在していてもフロー方向にある通信からの競合だけが考慮されるという意味において、媒体における競合の検出もまた「指向性」になる(すなわち、所定の方位角における競合を検出する)。
【0076】
MAC(メディアアクセスコントロール)は、そのASテーブルを調べて、媒体における所定の方位角における競合を検出する。指向性の可変ビームアンテナ101はSDMA(空間分割多重アクセス)の効率を向上させるので、これは媒体内の他のフローの妨害を最小限に抑えながら低優先度フローのパケット注入レートをも増大させ、よって、高優先度のトラフィック及び低優先度のトラフィックのスループットが増大するに至る。それと同時に、複数の高優先度フローがカップリングされる機会は減少され、高優先度フローの性能が改善されることになる。
【0077】
次に、本実施形態に係るフローレート制御方式における、ある高優先度フローの、他のフローによる検出及び当該高優先度フローのフローレートの測定について説明する。
【0078】
フローによるパケット信号の送信が開始されると、パケット信号は、複数のホップを介し、かつMAC層において送信され、中間の各ノード無線局におけるパケット配送は、RTS信号、CTS信号、DATA信号及びACK信号の交換によって確認される。本実施形態において、RTS信号及びCTS信号は、低優先度フローの発信元無線局においてパケット注入レート制御に対して下される決定に関する、フローに関連した情報を検出しかつ逆伝搬するために使用される。
【0079】
図8が示すように、低優先度フローは、低優先度フローと高優先度フローの向きが重なる場合にのみ、当該高優先度フローに干渉する。図8では、ノード無線局N1及びN3は、互いに、オムニパターンのアンテナパターンを用いた場合の送信レンジ内にあるが、ノード無線局N1からノード無線局D1へのフローは、ノード無線局N3からノード無線局D2へのフローに干渉しない。これを保証するためには、低優先度フローにおける各ノード無線局は、当該ノード無線局の可変ビームアンテナ101によって低優先度フローの方向に形成された送信ゾーンが、高優先度フローのパケット信号を伝送するノード無線局を含むか否かを検出することが不可欠である。送信ゾーンがそのようなノード無線局を含むならば(すなわち干渉が存在するならば)、このことは、低優先度フローが高優先度フローを妨害することを含意し、必然的に低優先度フローのフローレートを制御して高優先度フローのフローレートを保護する必要がある。以下、任意のノード無線局1−nが高優先度フローを検出しかつ当該高優先度フローのフローレートを測定するための機構を定式化する。そのために、まず、いくつかのパラメータを定義する。
【0080】
<定義1>ノード無線局1−nが、可変ビームアンテナ101を用いて、送信レンジ(送信半径)Rで方位角α及びビーム幅(角度)βの送信ビームを形成するとき、方位角αにおけるノード無線局1−nの有効到達範囲をノード無線局1−nの送信ゾーンTZn(α,β,R)と定義する。図9に、この送信ゾーンTZn(α,β,R)を示す。これは、ノード無線局1−mが送信ゾーンTZn(α,β,R)内にありかつノード無線局1−mが受信モードにある場合に、ノード無線局1−nが、当該ノード無線局1−nに関する送信方位角α、ビーム幅β及び送信レンジRでメッセージを送信するときはいつでも、上記メッセージがノード無線局1−mによって受信されることを含意する。ノード無線局1−mが送信ゾーンTZn(α,β,R)の外に移動すると、ノード無線局1−nとノード無線局1−mとの間の接続性は失われる。本実施形態では送信ビーム幅(角度)β及び送信レンジZが一定であるので、後の議論では、送信ゾーンTZn(α,β,R)を送信ゾーンTZn(α)と呼ぶ。
【0081】
<定義2>RRTHi,α,n(t)(RTS信号受信時刻)は、その時点で高優先度フローHiを取り扱っている任意のノード無線局から、ノード無線局1−nが、ノード無線局1−nに関する方位角αでRTS信号を受信する時刻tと定義される。
【0082】
<定義3>PAIHi,α,n(t)(パケット到着間隔)は、ノード無線局1−nにおいて、時刻tに、ノード無線局1−nに関する方位角αで高優先度フローHiから受信される、2つの連続的なRRTの受信時刻の間隔と定義される。これは、指向性の可変ビームアンテナ101を備えた任意のノード無線局1−nにより、その近傍における高優先度フローのフローレート(すなわち、単位時間当たりのパケット数:1/PAIHi,α,n(t))を測定するために使用される。この定義により、次式が成り立つ。
【0083】
[数1]
PAIHi,α,n(t)
=RRTHi,α,n(t)−RRTHi,α,n(tprevious) (5)
【0084】
ここで、RRTの以前の受信時刻tpreviousは、t−Δt<tprevious≦tを満たす。Δtは、ノード無線局1−nに到着する2つのRTS信号の有効な連続性を保証するために導入される時間周期である。例えば、ノード無線局1−nが、ランダムなチャンネル誤差、衝突又は移動性に起因してRTS信号を受信し損なえば、ノード無線局1−nは誤ったフローレートを計算する可能性がある。このようなアドホック無線ネットワークにおいて、時間周期Δtの導入は必要である。RTS信号を発行することのない高優先度フローの宛先無線局の場合、その高優先度フローの宛先無線局において高優先度フローのフローレートを計算するために、CTS信号受信時刻がモニタリングされる。
【0085】
<定義4>PAITn(t)(PAIテーブル)は、図12に示されたような、各方位角αにおける各高優先度フローHiのパケット到着間隔PAIHi,α,n(t)を記憶した、ノード無線局1−nにおける時刻tでのパケット到着間隔テーブルと定義される。
【0086】
これで、ノード無線局1−nにおける低優先度フローが高優先度フローとの競合を発生させているか否かは、低優先度フローの送信方向又は送信ゾーンと、そのゾーン内で進行中の高優先度の通信とに依存する。ここで、ノード無線局1−nにおける低優先度フローは、ノード無線局1−nに関する送信ゾーンTZγを使用しているものと仮定する。言い替えれば、送信ゾーンTZγの方位角γは、ノード無線局1−nにおける、ある時刻tでの低優先度フローの向きである。ノード無線局1−nにおけるこの低優先度フローがその近傍における任意の高優先度フローとの競合を発生させているか否かは、送信ゾーンTZγの方位角γ方向におけるPAIテーブルのエントリに依存する。すなわち、送信ゾーンTZγの方位角γ方向において、PAIテーブルが{<PAIHj,γ,n(t)><PAIHk,γ,n(t)>…}のような高優先度フローに関する何らかのPAIのエントリを含んでいる場合には、低優先度フローのレート調整のために、次式で定義される高優先度フローに関するPAIの最大値MAXPAI(γ,t)が、当該低優先度フローの発信元無線局に逆伝搬される必要がある。
【0087】
[数2]
MAXPAI(γ,t)
=MAX{<PAIHj,γ,n(t)>,<PAIHk,γ,n(t)>,…} (6)
【0088】
MAXPAI(γ,t)は、低優先度フローのパケット信号を伝送するノード無線局が、これらのPAI値の最大値がフローレートの最小値を示すという意味において最も影響される高優先度フローを識別することを援助することは注目すべき点である。従って、この低優先度フローは、この最大のPAIを保護するために当該低優先度フローのフローレートを調整するように試み、これにより、PAIの最大値を有する高優先度フローだけではなく、他の高優先度フローも自動的に保護される。
【0089】
次に、低優先度フローの発信元無線局による、高優先度フローのフローレートの分散測定技術について検討する。発信元無線局Sから宛先無線局Dへのルート「S→N1→…→Nk−1→Nk→Nk+1→…→D」が低優先度フローであるとすると、各ノード無線局は、PAIHi,α,Nk(t)を用いて、高優先度フローのフローレートを独立に測定している。低優先度フローの各ノード無線局で測定される高優先度フローのフローレートは、互いに異なっている可能性がある。ただし、制御決定を下すためには、低優先度フローの発信元無線局は、フローレートのボトルネック情報、すなわち、フロー「S→N1→…→Nk−1→Nk→Nk+1→…→D」における各ノード無線局で測定されたすべてのフローレート値のうちの最低値を認識する必要がある。言い替えれば、発信元無線局Sは、低優先度フロー「S→N1→…→Nk−1→Nk→Nk+1→…→D」の全ノード無線局におけるMAXPAIの最大値を知る必要がある。
【0090】
議論を簡単化するため、これまでは1つだけの低優先度フローが存在する場合について考察してきた。しかしながら、1つのノード無線局は複数の低優先度フローに含まれている可能性がある。よって、MAXPAIを、任意の方位角γの絶対値ではなく、フローの通信ID及びその通信IDに係るフローの向きに関連付ける必要がある。そこで定義5において、MAXPAIの定義を下記のように変更する。
【0091】
<定義5>DMPAI(Nk)Li(t)又は時刻tにおいて低優先度フローLiのパケット信号を取り扱って伝送するノード無線局Nkで検出される最大パケット到着間隔を、ノード無線局Nkで検出される低優先度フローLiの向きにおける高優先度フローの最大PAIと定義する。
【0092】
<定義6>PPAI(Nk)Li(t)(伝搬パケット到着間隔)は、低優先度フローLiの一部「Nk+1→…→D」の各ノード無線局によって測定された値であって、ノード無線局Nk+1からの、ノード無線局Nkにおける、高優先度フローの最大のPAIの伝搬された値である。よって、次式が成り立つ。
【0093】
[数3]
PPAI(Nk)Li(t)
=MAX{DMPAI(Nk+1)Li(t),…,DMPAI(D)Li(t)} (7)
[数4]
PPAI(Nk−1)Li(t)
=MAX{DMPAI(Nk)Li(t),PPAI(Nk)Li(t)} (8)
【0094】
よって、PPAI(S)Liは、低優先度フローLiの発信元無線局Sによって最終的に検出される、高優先度フローの最大パケット到着間隔である。低優先度フローLiの発信元無線局Sは、この情報を使用して低優先度フローLiのフローレートを適応的に制御する。
【0095】
次に、本実施形態に係るフローレート制御方式における、低優先度フローのフローレートのフィードバック制御について説明する。
【0096】
以下の議論では、発信元無線局におけるパケット注入間隔(PII)を、フローレートを制御するための尺度として考慮している。発信元無線局におけるフローのパケット注入レートPIR「パケット/秒」は、次式により計算される。
【0097】
[数5]
PII=1/PIR (9)
【0098】
例えば、発信元無線局におけるPIIが20ミリ秒(msec)であれば、PIR=50パケット/秒である。
【0099】
フローレートに対して何らかの制御決定を下すためには、前述のように、まずPIDコントローラにおける誤差項を計算する必要がある。従って、次式の誤差信号値eを用いる。
【0100】
[数6]
「任意の低優先度フローLiのその発信元無線局Sにおける誤差信号値e」
=Rp−PPAI(S)Li (10)
【0101】
ここで、Rpは、高優先度フローの所望されるPAIであり、この値Rpを設定値として用いる。PPAI(S)Liは、低優先度フローLiにおけるノード無線局によって検出されかつ低優先度フローLiの発信元無線局Sへ逆伝搬される、低優先度フローLiの近傍における高優先度フローの最大パケット到着間隔である。各高優先度フローは予め指定されたパケット注入レートの設定値Rpを有し、このパケット注入レートの設定値Rpは、高優先度フローがいかなる競合に直面する必要もないときは、任意の中間のノード無線局におけるパケット到着間隔に対応するはずであることが仮定される。ネットワーク内のすべてのノード無線局がこの値を認識し、これは所望の高優先度フローのPAIに対応している。前述した通り、複数の高優先度フローが存在するアドホック無線ネットワークにおいては、高優先度フローH1がその近傍においてもう1つの高優先度フローH2を検出し、これらの2つの高優先度フローがカップリングされる可能性がある場合には、フローH1及びH2は、それらの設定値を、予め定義された新しい値Rnewに変更し、この情報がこれらの近傍における低優先度フローに伝送される。フローH1が、設定値を値Rnewに変更した後で、指定された時間期間にわたってその近傍において他の高優先度フローの存在を検出しなければ、フローH1のフローレートは設定値Rpに戻る。
【0102】
誤差信号値e(n)及び連続する2つの誤差信号値間の時間周期Δtが計算されると、低優先度フローLi(S)のPIIは、次式のように計算される。
【0103】
【数5】
【0104】
パラメータkp,ki及びkdの値は、最適な性能を得るように調整する必要がある。以上説明したコントローラを実装したアドホック無線ネットワークの性能についてのシミュレーション結果を後述する。
【0105】
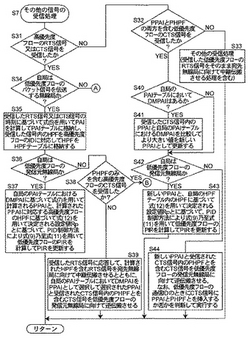
図15乃至図19は、本実施形態に係るフローレート制御方式として、図2のノード無線局1の管理制御部105によって実行されるパケット送受信制御処理を示すフローチャートである。
【0106】
図15において、まず、ステップS1において回転セクターパターンで可変ビームアンテナ101を所定方位角(例えば、30度)毎に変化して回転走査するように制御して受信信号を受信し、ステップS2において所定のしきい値以上の信号強度レベルの受信信号を受信したか否かが判断され、YESのときはステップS3に進む一方、NOのときはステップS8に進む。ステップS8において送信すべきパケット信号があるか否かが判断され、YESのときはステップS9に進む一方、NOのときは図19のサブルーチンであるPAI削除処理のステップS12を実行した後、ステップS1に戻る。ステップS9において送信すべきパケット信号はビーコン信号であるか否かが判断され、YESのときはステップS10に進む一方、NOのときはステップS11に進む。ステップS10においてオムニパターンでビーコン信号を送信した後、ステップS1に戻る。一方、ステップS11においてその他の信号をセクターパターン又は適応制御パターンで送信し、すなわち、図13に示すように、各信号に応じて対応する放射パターンで送信を行った後、ステップS1に戻る。
【0107】
ステップS3では、回転セクターパターンを停止して、可変ビームアンテナ101の放射パターンを、停止した所定の方位角に向けるセクターパターンに設定する。次いで、ステップS4において適応制御パターンで受信信号を受信し、パケット情報を復号化し受信信号の信号強度レベルを測定し、ステップS5において受信信号はビーコン信号か否かが判断され、YESのときはステップS6に進む一方、NOのときはステップS7に進む。ステップS6においてパケット情報内のノード無線局IDと検出された方位角と信号強度レベルに基づいてASテーブルの内容を更新した後、ステップS1に戻る。一方、ステップS7において、図16乃至図18のサブルーチンであるその他の信号の受信処理を実行した後、ステップS1に戻る。
【0108】
図15の制御フローにおいては、ステップS1,S2において、可変ビームアンテナ101を回転走査して所定のしきい値以上の信号強度レベルの受信信号を受信したときに、その受信信号を検出しているが、本発明はこれに限らず、可変ビームアンテナ101を360度にわたって回転走査して、所定のしきい値以上の信号強度レベルの受信信号を受信しかつそのうちの最大の受信信号を、検出された受信信号としてもよい。
【0109】
図16乃至図18は図15のサブルーチンであるその他の信号の受信処理(ステップS7)を示すフローチャートである。
【0110】
図16のステップS31において、まず、高優先度フローのRTS信号又はCTS信号を受信したか否かが判断され、YESのときはステップS34に進む一方、NOのときはステップS32に進む。ステップS32においてPPAIとPHPFの両方を含む低優先度フローのCTS信号を受信したか否かが判断され、YESのときはステップS40に進む一方、NOのときはステップS33においてその他の受信処理を実行した後、元のメインルーチンに戻る。ここで、ステップS33のその他の受信処理は、受信された低優先度フローのRTS信号をそのまま宛先無線局に向けて中継伝搬させる処理を含む。
【0111】
ステップS34においては、自局が低優先度フローのパケット信号を伝送する無線局であるか否かが判断され、YESのときはステップS35に進み、NOのときは図17のステップS51に進む。ステップS51において、受信したRTS信号又はCTS信号に基づいて、所定時間Ta内に受信したHPFの値を1だけインクリメントした後、更新したHPFの値を、高優先度のフローのIDに対応してHPFテーブルに格納する。このステップでは、高優先度フロー(例えば、フローHiとする。)のパケット信号を取り扱って伝送するノード無線局において、RTS信号又はCTS信号を受信すると、そのノード無線局がこれまでに所定の時間内に受信したHPFの値を1だけインクリメントする。その上で、そのインクリメントされたHPFの値を、そのノード無線局が取り扱っているフローH1の通信IDに対応したHPFとして格納する。つまり、高優先度フローHiのパケット信号を取り扱って伝送するノード無線局では、常に自局のノード無線局の通信エリア内における他の隣接した高優先度フローHj(i≠j)の数をモニタリングし、自局で取り扱っているフローHiのHPFの値を更新する。
【0112】
次いで、ステップS52において、自局が高優先度フローの発信元無線局か否かが判断され、YESのときはステップS53に進み、NOの時はステップS54に進む。ステップS53において、自局のHPFテーブルのHPFから決まる設定値Rpに基づいて高優先度フローのPIRを計算してパケット注入レートPIRを更新する。その設定値Rpは、予め決められた定数rと、HPFテーブルに格納されている中で、自局で取り扱っているフローに対するHPFの値とに基づいて、次式を用いて計算される。
【0113】
[数7]
HPF=0のとき:Rp=r,
HPF=1のとき:Rp=r/2,
HPF=2のとき:Rp=r/3,
...........
HPF=nのとき:Rp=r/n
(12)
【0114】
上記式(12)により決定された設定値Rpをそのまま、PIRとする。
【0115】
[数8]
PIR=1/PII=Rp (13)
【0116】
ステップS53においては、パケット注入レートPIRを更新した後、元のメインルーチンに戻る。また、ステップS54において、受信したRTS信号に応答して、計算されたHPFを含むRTS信号を宛先無線局に向けて中継伝搬させるとともに、上記更新されたHPFテーブル内のHPFの値を新しいPHPFとし、当該新しいPHPFを含むCTS信号を高優先度フローの発信元無線局に向けて逆伝搬させた後、元のメインルーチンに戻る。
【0117】
再び図16を参照すると、ステップS35においては、受信されたRTS信号又はCTS信号の時刻に基づいて、式(5)を用いてPAIを計算してPAIテーブルに格納し、受信した信号内のHPFを、高優先度フローの通信IDに対応してHPFテーブルに格納する。低優先度フローのパケット信号を伝送するノード無線局においては、単に高優先度フローのRTS信号又はCTS信号に含まれているノードID(高優先度フローの通信IDに相当する)とHPFの値を、そのままHPFテーブルに格納して更新する。
【0118】
次いでステップS36において、自局が低優先度フローの発信元無線局であるか否かが判断され、YESのときはステップS37に進む一方、NOのときはステップS38に進む。ステップS37では、自局のPAIテーブルにおけるDMPAIに基づいて式(7)を用いて計算されるPPAIと、上記計算されたPPAIに対応する高優先度のフローのHPFから決定される設定値Rpとに基づいて、低優先度フローのPIRを計算してPIRを更新する。このステップにおいて計算されたPPAIはPAIの最小値であり、このPAIの最小値に相当する高優先度フローのHPFの値から、式(12)を用いて設定値Rpを計算する。計算された設定値Rpに基づいて、式(9)乃至式(11)を用いてPIRを計算して更新する。
【0119】
ステップS37においてPIRを更新した後、元のメインルーチンに戻る。
【0120】
ステップS38では、PHPFのみを含む高優先度のフローのCTS信号を受信したかが判断され、YESのときは、図18のステップS55に進む一方、NOのときはステップS39に進む。ステップS55において、自局のHPFテーブルにおいてHPFがあるか否かが判断され、YESのときはステップS56に進み、NOのときはステップS56Aに進む。ステップS56において、受信されたCTS信号内のHPFと、自局で伝送しているHPFとを平均化して、その平均値を新しいPHPFとして更新し、ステップS57に進む。また、ステップS56Aでは、受信したCTS信号内のHPFを新しいPHPFとして設定してステップS57に進む。
【0121】
ステップS57において、自局が高優先度フローの発信元無線局か否かが判断され、YESのときはステップS58に進み、NOのときはステップS59に進む。ステップS58において、新しいPHPFをHPFとしたときに式(13)を用いて計算される設定値Rpに基づいて式(13)を用いて高優先度フローのPIRを計算してPIRを更新した後で、元のメインルーチンに戻る。ステップS59において、新しいPHPFを含む高優先度のフローのCTS信号を高優先度フローの発信元無線局に向けて逆伝搬させる。なお、ステップS59では、高優先度フローの通信IDの時にCTS信号にPHPFを挿入するか否かを判断して実行する。そして、元のメインルーチンに戻る。
【0122】
さらに、図16のステップS39において、受信したRTS信号に応答して計算されたHPFを含むRTS信号を宛先無線局に向けて中継伝搬させるとともに、自局のPAIテーブルにおいてDMPAIをPPAIとして選択して上記選択されたPPAIと、上記受信されたCTS信号内のPHPFとを含むCTS信号を低優先度フローの発信元無線局に向けて逆伝搬させた後、元のメインルーチンに戻る。
【0123】
ステップS40では、自局のPAIテーブルにおいてDMPAIはあるか否かが判断され、YESのときはステップS41に進む一方、NOのときはそのままステップS42に進む。ステップS41において、受信したCTS信号内のPPAIと、自局のPAIテーブルにおけるDMPAIとを比較してより大きい値を新しいPPAIとして更新し、次いで、ステップS42において、自局が低優先度フローの発信元無線局であるか否かが判断される。ステップS42でYESのときはステップS43に進む一方、NOのときはステップS44に進む。ステップS43では、新しいPPAIと、自局のHPFテーブル内のHPFから式(12)を用いて決定される設定値Rpとに基づいて、式(9)乃至式(11)を用いて低優先度フローのPIRを計算してPIRを更新し、元のメインルーチンに戻る。また、ステップS44では、新しいPPAIと、受信されたCTS信号内のPHPFを含むCTS信号を低優先度フローの発信元無線局に向けて逆伝搬させる。なお、ステップS44において、低優先度フローの通信IDのときにCTS信号にPPAIとPHPFを挿入するか否かを判断して実行することとする。そして、元のメインルーチンに戻る。
【0124】
図19は、図15のサブルーチンであるPAI削除処理(ステップS12)を示すフローチャートである。
【0125】
図19のステップS61において、各高優先度フローについて時間Δtの間RTS信号又はCTS信号を受信していないか否かが判断され、YESのときはステップS62に進む一方、NOのときはそのまま元のルーチンに戻る。ステップS62では、当該高優先度フローに対するPAIをPAIテーブルから削除した後、元のルーチンに戻る。
【0126】
以上説明したように、本実施形態のアドホック無線ネットワーク内の各ノード無線局によって実行されるパケット送受信制御処理によれば、異なる複数の優先度のフローが存在するアドホック無線ネットワークにおいて、各フローの優先度に基づいて当該フローのQoSをサポートすることができる。これにより、高優先度のフローに対する低優先度フローの干渉を最小限にするように低優先度フローを制御し、高優先度のフローのスループットを向上させることができる。
【実施例1】
【0127】
次いで、本実施形態のアドホック無線ネットワークのシミュレーションによる性能評価について説明する。
【0128】
本発明者らは、本発明の実施形態に係る、フローレート制御方式を用いたアドホック無線ネットワークの性能を、クアルネット(QualNet)・ネットワークシミュレータを用いたシミュレーションによって評価した(非特許文献18を参照)。シミュレーションでは、IEEE802.11に基づく指向性のMAC(非特許文献16を参照)を考慮し、また、提案した実施形態に係るプロトコルを、可変ビームアンテナ101を用いた場合についてのみ実装した。シミュレーションは、30度の方位角毎に離散的にステアリングされて360度の範囲をカバーする擬似スイッチング式のビームアンテナの形式である、電子制御導波器アレーアンテナ装置(非特許文献16を参照)を指向性の可変ビームアンテナ101として用いて行った。クォールネット・ネットワークシミュレータには、提案した実施形態に係るプロトコルを実装するために必要な変更を加えた。表1に、シミュレーションに使用したパラメータのセットを示す。
【0129】
【表1】
【0130】
まず、本実施形態に係るフローレート制御方式が実装され、低優先度フローの発信元無線局が低優先度フローコントローラLPCを備えたノード無線局として動作するアドホック無線ネットワークの性能評価について説明する。
【0131】
議論を簡単化するために、1つの列毎に6つのノード無線局を有し、必要な場合は常にそのうちの2つの端部のノード無線局が各々発信元無線局及び宛先無線局として動作する格子状のトポロジーを仮定する。低優先度フローコントローラLPCの性能評価は、次のように設定された3つの格子状トポロジーの下で行った。
【0132】
(A)格子の第1の列に沿った単一の高優先度フローと、格子の第2の列に沿った単一の低優先度フロー:両方のフローのルートは、ルートカップリングを発生させるのに十分なほど物理的に近接している(以下、第1のトポロジーという。)。
(B)格子の第2の列に沿った単一の高優先度フローと、格子の第1及び第3の列に沿った2つの低優先度フロー:3つのルートはすべて、ルートカップリングを発生させるのに十分なほど物理的に近接している(以下、第2のトポロジーという。)。
(C)格子の第2及び第3の列に沿った2つの高優先度フローと、格子の第1の列に沿った単一の低優先度フロー:これらはすべて、ルートカップリングを発生させるのに十分なほど物理的に近接している(以下、第3のトポロジーという。)。
【0133】
本実施形態に係るプロトコルにおいて得られる利得を明確に示すため、静的ルートを使用してルーティングプロトコルによる影響を除去した。また、ルーティングプロトコルに起因するいかなる制御パケットも発生させないために、静的ルートを使用した。発信元無線局及び宛先無線局のペアをランダムに選択する代わりに、高優先度フローと低優先度フローとの間に競合が存在するような発信元無線局及び宛先無線局のペアを選択し、パケット注入間隔の制御の効果を実証できる状況を人工的に創出した。
【0134】
最初のシミュレーション結果として、上述の第1のトポロジー、すなわち、1つの高優先度フローと1つの低優先度フローとが存在する場合の低優先度フローコントローラLPCの性能について説明する。
【0135】
図20乃至図23は、1つの高優先度フローと1つの低優先度フローとが存在する場合の低優先度フローコントローラLPCの性能を示している。高優先度フローのパケット注入間隔(PII)について所望される設定値Rpは20ミリ秒である、すなわち、所望のパケット注入レートは毎秒50パケットである。512バイトのパケットサイズ及び100%のパケット伝送率(PDR)の場合、パケット注入間隔PII=20ミリ秒において期待されるスループットは204.8kbpsである。
【0136】
図20は、低優先度フローコントローラLPCを用いた場合の、高優先度フローのパケット到着間隔(PAI)と低優先度フローのパケット注入間隔(PII)との時間的変化を示すグラフである。図20に示されたシミュレーションでは、高優先度フロー(H)を保護するための低優先度フロー(L)のフローレート適応制御が行われている。図20に示されたシミュレーションでは、高優先度フローのPII(H)及び低優先度フローのPII(L)の両方の初期値は20ミリ秒である。PII(L)=20ミリ秒で動作する低優先度フローがカップリングされている場合には高優先度フローは20ミリ秒のフローレートを保持できないので、低優先度フローのPIIは即時かつ急激に増大して高優先度フローのフローレートを保護する。低優先度フローのフローレートは、漸次減少し、平均してPII(L)=60ミリ秒(近似値)に落ち着く。
【0137】
図21は、本実施形態に係るフローレート制御として適応的なパケット注入レート制御を実行した場合における、対応するスループットとパケット伝送率の結果を示す表である。高優先度フローは、1の値であるパケット伝送率とともにスループット204kbpsを保持することができる。低優先度フローのスループットは53kbpsであり、パケット伝送率は0.999である。このシミュレーション結果を得る際に使用されたパラメータkp,ki及びkdの値はそれぞれ、0.8,0.1,0.1である。
【0138】
図22及び図23は、上記条件下で、本実施形態に係るフローレート制御を実行するコントローラを使用しない場合のシステムの動作を示す。図22及び図23のシミュレーションでは、1つの高優先度フロー(H)及び1つの低優先度フロー(L)が存在する場合に、高優先度フローのパケット注入間隔を20ミリ秒(すなわち毎秒50パケットに固定されたフローレート)に一定に保持し、かつ低優先度フローのパケット注入間隔を手動で増大させ、ここで、図22は、低優先度フローのパケット注入間隔に対する各フローのスループットを示すグラフであり、図23は、低優先度フローのパケット注入間隔に対する各フローのパケット伝送率(PDR)を示すグラフである。
【0139】
高優先度フロー及び低優先度フローの両方がパケット注入間隔PII=20ミリ秒に設定されているとき、高優先度フローのスループットは129kbpsであり、パケット伝送率は0.63であり、一方、低優先度フローのスループットは124kbpsであり、パケット伝送率は0.6である。ここで、低優先度フローのPIIを手動で変化させることによって、高優先度フローのスループット及びパケット伝送率を測定した。低優先度フローのパケット注入間隔PII(すなわちPII(L))を増大させると、高優先度フローのスループット及びパケット伝送率はともに増大する。パケット注入間隔PII(L)=60ミリ秒又はこれ以上のときに、高優先度フローはパケット伝送率0.993でスループットのピーク値204kbpsに達する。よって、パケット注入間隔PII(L)=60ミリ秒が、手動で調整された低優先度フローの最適な設定値であり、この設定値のときに、高優先度フローをその所望のレベルに保持することができる。このことが、低優先度フローのフローレートを制御することによって達成しようとしているものである(図20を参照)。この設定値における低優先度フローのスループットは、67kbpsである。
【0140】
次のシミュレーション結果として、上述の第2のトポロジー、すなわち、1つの高優先度フローと2つの低優先度フローとが存在する場合の低優先度フローコントローラLPCの性能について説明する。
【0141】
図24は、1つの高優先度フローHと2つの低優先度フローL1及びL2とが存在し、すべてが互いにカップリングされる場合において、本実施形態に係るフローレート制御として適応的なパケット注入レート制御を実行したときの、対応するスループットとパケット伝送率を示す表であり、図25は、低優先度フローコントローラLPCの性能として、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。図24及び図25のシミュレーションでは、高優先度フロー(H)のフローレートを保護しかつ低優先度フロー(L1及びL2)自体のスループットを最大化するために、2つの低優先度フローに対する適応的なフローレート制御が行われている。
【0142】
高優先度フローのパケット注入間隔(PII)の所望される設定値Rpは20ミリ秒である、すなわち所望されるパケット注入レートは毎秒50パケットである。図25に、低優先度フローコントローラLPCの動作を示す。図25のシミュレーションでは、パケット注入間隔PII(H)、PII(L1)及びPII(L2)の初期値は20ミリ秒である。低優先度フローコントローラLPCの制御動作を示すため、フローH及びL1の通信は、シミュレーション開始後30秒の時刻に同時に開始させてシミュレーションの終わりまで継続させ、それに対して、フローL2の通信はシミュレーション開始後110秒の時刻に開始させて、シミュレーション開始後180秒の時刻に停止させる。フローL2が存在しなければ、低優先度フローコントローラLPCの動作は先の場合と同じである。しかしながら、フローL2を開始させると、フローL1及びL2の両方のPIIは即時かつ急激に増大してフローHのフローレート(すなわちパケット注入間隔PII)をPII(H)=20ミリ秒に保護する。両方の低優先度フローのフローレートは、漸次減少し、平均してPII(L)=220ミリ秒(近似値)に落ち着く。フローL2が停止されると、図示するようにフローL1のPIIはそのもとの値へと落ち着く。
【0143】
図24を参照すると、高優先度フローは、図20乃至図23に示されたシミュレーション結果と同様に、1の値であるパケット伝送率とともにスループット204.8kbpsを保持することができる。フローL1のスループットは35.15kbpsであり、パケット伝送率は0.99であり、一方、フローL2のスループットは17.5kbpsであり、パケット伝送率は1である。フローL1とL2のスループットの差は、フローL2が存在する場合と存在しない場合とでフローL1が異なるPII(L1)で動作したという事実に起因する。このシミュレーション結果を得るために使用されたパラメータkp,ki及びkdの値はそれぞれ、0.8,0.5,0.2である。本実施形態に係るフローレート制御を実行するコントローラが存在しなければ、フローHのスループットは82.06kbpsであり、パケット伝送率は0.4である。
【0144】
また、次のシミュレーション結果として、上述の第3のトポロジー、すなわち、2つの高優先度フローと1つの低優先度フローとが存在する場合の低優先度フローコントローラLPCの性能について説明する。
【0145】
図26は、2つの高優先度フローH1及びH2と1つの低優先度フローLとが存在し、すべてが互いにカップリングされる場合において、本実施形態に係るフローレート制御として適応的なパケット注入レート制御を実行したときの、対応するスループットとパケット伝送率を示す表であり、図27は、低優先度フローコントローラLPCの性能として、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。図26及び図27のシミュレーションでは、高優先度フローH1及びH2のフローレートを保護しかつ低優先度フローL自体のスループットを最大化するために、低優先度フローLに対する適応的なフローレート制御が行われている。
【0146】
システムは、パケット注入間隔PIIの値を小さくするだけでは余裕のある状態で2つの高優先度フローを保持することができないので、高優先度フローのパケット注入間隔(PII)の所望される設定値Rpは、このシミュレーションでは40ミリ秒に設定される、すなわち所望のパケット注入レートは毎秒25パケットに設定される。この値は、実験で得たものである。このシミュレーションにおける低優先度フローコントローラLPCのタスクは、高優先度フローH1及びH2の両方をこの所望の設定値に保持することである。図27は、低優先度フローコントローラLPCの動作を示す。図27のシミュレーションでは、パケット注入間隔PII(H1)、PII(H2)及びPII(L)の初期値は40ミリ秒である。低優先度フローは、最初の急激な増大の後、平均してパケット注入間隔PII(L)=120ミリ秒(近似値)に落ち着く。図26は、対応するスループットとパケット伝送率を示す。両方の高優先度フローは、ほぼ1の値であるパケット伝送率で所望のスループット102.3kbpsを保持することができる。このシミュレーションにおいて、パケット注入間隔PII(H)は40ミリ秒であるため、パケットサイズが512バイトであってかつ100%のパケット伝送率でる場合の理想スループットは102.4kbpsである。低優先度フローLのスループットは、ほぼ1の値であるパケット伝送率で33.77kbpsである。このシミュレーション結果を得るために使用されたパラメータkp,ki及びkdの値は、0.8,0.8,0.1である。
【0147】
以上説明したシミュレーション結果は、オーバーヘッドのない理想的な環境の格子状トポロジーにおける低優先度フローコントローラLPCの評価であるが、次に、ランダムトポロジーにおけるシステム性能の評価についてのシミュレーション結果を説明する。
【0148】
このシミュレーションでは、本発明者らが開発した指向性MACプロトコルのようなロケーション追跡機構を有する、回転セクタに基づく受信機側に装備する指向性MACプロトコル(非特許文献16を参照)を実装した。また、このシミュレーションでは、本発明者らが開発した指向性ルーティングプロトコルのような、ネットワークを認識するルーティングプロトコル(非特許文献8を参照)を用いた。様々なMAC及びルーティング層制御パケットのオーバーヘッドを伴う実際的なシナリオにおいて本発明の実施形態に係るフローレート制御方式の有効性を示すため、このMAC及びルーティングプロトコル上に本実施形態に係るフローレート制御方式を実装した。1500m×1500mの正方形の有界領域に100個のノード無線局を有するランダムトポロジーにおいて、高優先度フローとしての1つの発信元無線局及び宛先無線局のペアと、低優先度フローとしてのさらに5つの発信元無線局及び宛先無線局のペアとをランダムに選択した。システム性能の評価は、各ノード無線局が静的に配置された場合と、各ノード無線局が移動する場合との両方に関して行った。
【0149】
まず、各ノード無線局が領域内に静的かつランダムに配置された場合のシミュレーション結果について説明する。
【0150】
図28は、フローレート制御方式を実装したノード無線局からなる5つの低優先度フローが存在する場合の高優先度フローの性能を、低優先度フローに低優先度フローコントローラLPCが割り当てられていない場合と、他にまったくフローが存在せず高優先度フローが単独で動作する場合との比較で示したものである。高優先度フローが単独で動作する場合、これはほぼ86kbpsのスループットを生み出す。他の5つの低優先度フローが導入されかつフローレート制御方式(すなわち、低優先度フローコントローラLPCの制御方式)が割り当てられない場合は、図28から明らかであるように、この高優先度フローの性能はその以前の値のほぼ半分にまで劣化する。低優先度フローが存在しても、本実施形態に係るフローレート制御方式を使用するならば、高優先度フローのスループットは単独で動作していたときの値とほぼ同じである。
【0151】
図29は、低優先度フローコントローラLPCをいっさい使用しない場合と使用する場合の2つのシナリオにおける、5つの低優先度フローの性能を示している。本実施形態に係るフローレート制御方式を導入すると、低優先度フローは引き続き、フローレート制御をまったく行わなかった場合のその平均スループットの90%を保持することができる。このことは、低優先度フローのフローレートが高優先度フローのフローレートを保護するために十分なほど低下されなかったからではない。低優先度フローのパケット注入レートが最適に制御されると輻輳は低下し、媒体を適正に利用することがパケットロスを無視できるほど減少させる。この方式は低優先度フローのスループットをも最大化し、パケットは、ネットワークがその時点で処理し得る最適化されたレートで注入される。
【0152】
次に、各ノード無線局が領域内を移動する場合のシミュレーション結果について説明する。連続的に変化しているトポロジーにおいても本発明の実施形態に係るフローレート制御方式が頑健であることを示すために、ノード無線局装置が毎秒0−10メートルで移動しているという条件下で、本実施形態に係るプロトコルを試験しかつ評価した。輻輳情報が低優先度フローの発信元無線局へ高速で逆伝搬され、当該発信元無線局はそのフローレートの制御量を適応的に決定できることから、より優れた性能を達成することが可能である。
【0153】
図30は、本発明の実施形態に係るフローレート制御方式における高優先度フローの性能を、低優先度フローに低優先度フローコントローラLPCが割り当てられていない場合と、他にまったくフローが存在せず高優先度フローが単独で動作する場合との比較で示したものである。単独で動作する高優先度フローは、ほぼ133kbpsのスループットを生み出す。他の5つの低優先度フローが低優先度フローコントローラLPCなしで導入される場合は、図30から明らかであるように、この高優先度フローの性能はその以前の値のほぼ3分の1未満にまで劣化する。低優先度フローが存在しても、本発明の実施形態に係るフローレート制御方式を使用すれば、この高優先度フローのスループットはほぼ127kbpsにまで増加する。
【0154】
図31は、優先度に基づくフローレート制御方式をいっさい使用しない場合(低優先度フローコントローラLPCなし)と、本発明の実施形態に係るフローレート制御としてパケット注入レート制御を導入した後(低優先度フローコントローラLPCを使用)との2つのシナリオにおける低優先度フローの性能を示している。本シミュレーションによる評価において最も興味深い部分は、本実施形態に係るフローレート制御方式を導入すると、低優先度フローはむしろその平均スループットをも向上させ得ることを示している。この向上は、低優先度フローのパケット注入レートの最適な制御によりネットワークの輻輳が減少し、パケットロスを最小限に抑えた最適な媒体利用がもたらされることから可能となる。
【図面の簡単な説明】
【0155】
【図1】本発明に係る一実施形態であるアドホック無線ネットワークを構成する複数のノード無線局1−1乃至1−9の平面配置図である。
【図2】図1の各ノード無線局1の内部構成を示すブロック図である。
【図3】図1のアドホック無線ネットワークにおいて用いられるパケットデータの一般的なフォーマットを示す図である。
【図4】(a)は図1のアドホック無線ネットワークにおいて用いるRTSパケット信号のフォーマットを示す図であり、(b)は図1のアドホック無線ネットワークにおいて用いるCTSパケット信号のフォーマットを示す図である。
【図5】従来技術における問題点を示す図であって、オムニアンテナを用いたとき、低優先度フロー(S2−D2)が高優先度フロー(S1−D1)を妨害する場合を示す平面図である。
【図6】図1のアドホック無線ネットワークに適用される、基本的なフィードバックコントローラを概略的に示すブロック図である。
【図7】図6のフィードバックコントローラを図1のアドホック無線ネットワークに適用した場合の、優先度に基づいたフローレート制御装置を概略的に示すブロック図である。
【図8】本実施形態において、セクターパターンを可変ビームアンテナ101に設定して用いたとき、低優先度フロー(S2−D2)が高優先度フロー(S1−D1)と同時に存在することができることを示す平面図である。
【図9】図2の可変ビームアンテナ101によって形成されるノード無線局1−nの送信ゾーンTZn(α,β,R)を示す図である。
【図10】図2のデータベースメモリ154において格納される方位角及び信号強度レベルテーブル(ASテーブル)の一例を示す表である。
【図11】図2のデータベースメモリ154において格納される高優先度フローテーブル(HPFテーブル)の一例を示す表である。
【図12】図2のデータベースメモリ154において格納されるパケット到着間隔テーブル(PAIテーブル)の一例を示す表である。
【図13】図1のアドホック無線ネットワークにおいて用いられる各ノード無線局での放射パターンの種類と無線通信プロトコルを示すタイミングチャートである。
【図14】図1のアドホック無線ネットワークにおいて用いられるビーコン信号の動作を示すタイミングチャートである。
【図15】図2のノード無線局1の管理制御部105に従って実行されるパケット送受信制御処理を示すフローチャートである。
【図16】図15のサブルーチンであるその他の信号の受信処理(ステップS7)を示すフローチャートの第1の部分である。
【図17】図15のサブルーチンであるその他の信号の受信処理(ステップS7)を示すフローチャートの第2の部分である。
【図18】図15のサブルーチンであるその他の信号の受信処理(ステップS7)を示すフローチャートの第3の部分である。
【図19】図15のサブルーチンであるPAI削除処理(ステップS12)を示すフローチャートである。
【図20】本実施形態のシミュレーション結果であって、高優先度フローと低優先度フローとが存在するときの、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。
【図21】本実施形態のシミュレーション結果であって、高優先度フローと低優先度フローとが存在するときの、適応的パケット注入レート制御の結果を示す表である。
【図22】本実施形態のシミュレーション結果であって、高優先度フローと低優先度フローとが存在するときの、低優先度フローのパケット注入間隔に対する各フローのスループットを示すグラフである。
【図23】本実施形態のシミュレーション結果であって、高優先度フローと低優先度フローとが存在するときの、低優先度フローのパケット注入間隔に対する各フローのパケット伝送率を示すグラフである。
【図24】本実施形態のシミュレーション結果であって、1つの高優先度フローと2つの低優先度フローとが存在するときの、適応的パケット注入レート制御の結果を示す表である。
【図25】本実施形態のシミュレーション結果であって、1つの高優先度フローと2つの低優先度フローとが存在するときの、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。
【図26】本実施形態のシミュレーション結果であって、2つの高優先度フローと1つの低優先度フローとが存在するときの、適応的パケット注入レート制御の結果を示す表である。
【図27】本実施形態のシミュレーション結果であって、2つの高優先度フローと1つの低優先度フローとが存在するときの、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。
【図28】本実施形態のシミュレーション結果であって、複数のノード無線局が領域内に静的かつランダムに配置された場合、高優先度フローのみのとき、高優先度フロー及び5つの低優先度フロー(フローレート制御なし)のとき、並びに、高優先度フロー及び5つの低優先度フロー(フローレート制御有り)のときにおける高優先度フローのスループットの比較を示すグラフである。
【図29】本実施形態のシミュレーション結果であって、複数のノード無線局が領域内に静的かつランダムに配置された場合、低優先度フローについて、フローレート制御の有無に対する平均スループットを示すグラフである。
【図30】本実施形態のシミュレーション結果であって、複数のノード無線局が領域内を移動する場合、高優先度フローのみのとき、高優先度フロー及び5つの低優先度フロー(フローレート制御なし)のとき、並びに、高優先度フロー及び5つの低優先度フロー(フローレート制御有り)のときにおける高優先度フローのスループットの比較を示すグラフである。
【図31】本実施形態のシミュレーション結果であって、複数のノード無線局が領域内を移動する場合、低優先度フローについて、フローレート制御の有無に対する平均スループットを示すグラフである。
【符号の説明】
【0156】
1,1−1乃至1−9…ノード無線局、
10,20…減算器、
11…コントローラ、
12…プラント、
21…フローコントローラ、
22…ネットワークにおけるフローシステム、
23…フローレートを逆伝搬させるシステム、
101…可変ビームアンテナ、
102…サーキュレータ、
103…放射パターン制御部、
104…パケット送受信部、
105…トラヒックモニタ部、
106…回線制御部、
107…上位レイヤ処理装置、
130…パケット受信部、
131…高周波受信機、
132…復調器、
133…受信バッファメモリ、
140…パケット送信部、
141…送信タイミング制御部、
142…送信バッファメモリ、
143…変調器、
144…高周波送信機、
151…管理制御部、
152…検索エンジン、
153…更新エンジン、
154…データベースメモリ、
160…拡散符号発生器。
【技術分野】
【0001】
本発明は、複数のノード無線局を備えた、例えば無線LANなどの無線ネットワークにおいてパケット通信を行う、例えばアドホック無線ネットワークなどの無線ネットワークのための制御装置に関する。
【背景技術】
【0002】
無線通信システム及びパーソナルコンピュータの最近の進歩に伴い、移動体ルータとして動作する複数のノード無線局からなり、迅速に配置可能なインフラストラクチャなしのネットワークであることが想定されたアドホック無線ネットワークが研究されている。このアドホック無線ネットワークにおいて、最近、モバイルアドホックネットワークにおけるQoSを提供する課題に対して様々な解決方法が提案されている(非特許文献1及び2を参照。)。
【0003】
【特許文献1】特開2001−244983号公報。
【特許文献2】特開2001−024431号公報。
【非特許文献1】Kui Wu et al., “QoS Support in Mobile Ad hoc Networks”, Crossing Boundaries an interdisciplinary journal, Vol.1, No.1, Fall 2001。
【非特許文献2】Satyabrata Chakrabarti et al., “QoS issues in Ad Hoc Wireless Networks”, IEEE Communications Magazine, Vol.39, No.2, pp.142-148, February 2001。
【非特許文献3】X. Pallot et al., “Implementing Message Priority Policies over an 802.11 Based Mobile Ad Hoc Network”, Proceedings of MILCOM 2001, Washington, U.S.A., October 2001。
【非特許文献4】Kolarov et al., “A control theoretic approach to the design of close loop rate based flow control for high speed ATM networks”, Proceedings of IEEE INFOCOM'97, pp.293-300, April 1997。
【非特許文献5】S. Keshav, “A control-theoretic approach to flow control”, Proceedings of ACM SIGCOMM'91, pp.3-15, Zurich, Switzerland, September 1991。
【非特許文献6】C. R. Kalmanek et al., “Rate Controlled Servers for Very High Speed Networks”, Proceedings of Globecom 1990, 300.3.1-300.3.9, December 1990。
【非特許文献7】L. Benmohamed et al., “Feedback Control of Congestion in Packet Switching Networks: The Case of a Single Congested Node”, IEEE/ACM Transactions on Networking, Vol.1, No.6, pp.693-707, 1993。
【非特許文献8】Siuli Roy et al., “A Network-Aware MAC and Routing Protocol for Effective Load Balancing in Ad Hoc Wireless Networks with Directional Antenna”, Proceedings of ACM MobiHoc 2003, Maryland, U.S.A., 1-3 June 2003。
【非特許文献9】Thyagarajan Nandagopal et al., “Service differentiation through end-to-end rate control in low bandwidth wireless packet networks”, Proceedings of the 6th International Workshop on Mobile Multimedia Communications, San Diego, California, U.S.A., November 1999。
【非特許文献10】Seung-Seok Kang et al., “Provisioning Service Differentiation in Ad Hoc Networks by the Modification of Back off Algorithm”, International Conference on Computer Communication and Network (ICCCN) 2001, Scottsdale, Arizona, U.S.A., October 2001。
【非特許文献11】S. Mangold et al., “IEEE 802.11e Wireless LAN for Quality of Service”, (invited paper), Proceedings of the European Wireless 2002, Florence, Italy, February 2002。
【非特許文献12】Xue Yang et al., “Priority Scheduling in Wireless Ad Hoc Networks”, ACM International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc), June 2002。
【非特許文献13】Vance J. VanDoren, “Understanding PID Control: Familiar examples show how and why proportional-integral-derivative controllers behave the way they do”, Control Engineering, http://www.controleng.com, June 1, 2000。
【非特許文献14】Minorsky, “Directional Stability of automatically steered bodies”, Journal of American Social of Naval Engineering, Vol. 34, pp.284, 1922。
【非特許文献15】G. F. Franklin et al., “Feedback Control of Dynamic Systems”, Addison-Wesley, Singapore, 1988。
【非特許文献16】Tetsuro Ueda et al., “A Rotational Sector-based, Receiver-Oriented Mechanism for Location Tracking and Medium Access Control in Ad Hoc Networks Using Directional Antenna”, Proceedings of the IFIP conference on Personal Wireless Communications PWC 2003, Venice, Italy, September 23-25, 2003。
【非特許文献17】T. Ueda et al., “Evaluating the Performance of Wireless Ad Hoc Network Testbed Smart Antenna”, Fourth IEEE Conference on Mobile and Wireless Communication Networks (MWCN2002), September 2002。
【非特許文献18】QualNet Simulator Version 3.1, Scalable Network Technologies, http://www.scalable-networks.com, accessible on June 11, 2004。
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、非特許文献3で指摘されているように、移動体の無線チャンネルは帯域幅が限定されていて、トラフィックのあらゆるクラスに対して同じQoSを与えることができない。従って、あるクラスに他のクラスを上回る優先度を割り当てることによって、各クラスに異なるQoSを提供するための何らかの手段を実装する必要がある。有線環境に対してはいくつかの解決方法がすでに存在するが、これらの解決方法は、アドホック無線ネットワークにおいては、共用された通信環境とホストの移動性とに起因してうまく機能しない。
【0005】
何人かの研究者らは、ネットワーク内の輻輳を制御し、フローに基づくエンド・ツー・エンドのQoSを提供しかつ公平性の問題に対処するために、有線ネットワークにおいてフローレートを制御するための制御理論的アプローチの考案について探究している(非特許文献4乃至7を参照)。非特許文献4では、利用可能なビットレートサービスをサポートするコントローラを設計するために使用可能な制御機構が提案され、ここでは、ユーザは、フローレートをフィードバックして分散されたコントローラのセットを調整することにより、利用可能な帯域幅を公平にかつ動的に共用することができる。非特許文献5では、予約なしのネットワークにおけるトランスポート接続を制御するために使用可能な制御理論的アプローチを提示している。これらのフローレート制御方式は、ネットワーク内に存在する複数のフローがその時刻におけるネットワークの状態に依存して利用可能な帯域幅を等しく共用することを可能にするフィードバック制御機構を使用している。しかしながらこれらの方式は、いくつかのフローを他のフローよりも優先するという、優先度に基づいたサービスの問題をまったく取り扱っていない。さらに、これらの文献で調査されているものは有線ネットワーク環境である。
【0006】
アドホック無線ネットワークにおける2つのフローのルートが共通のノード無線局を共用するとき、もしくは互いに干渉し合うほど十分に近接しているときには、互いに影響し合い、ルートカップリングを生じさせる(非特許文献8を参照)。この場合、これら2つのルート内の複数のノード無線局は、それらのルートによって共用される媒体に対してアクセスするために常に競合するであろう。このような状況においては、低優先度フローのフローレートが減少されると、高優先度フローは、共用する媒体へアクセスする多くの機会を得ることになり、結果として輻輳は減少し、高優先度フローのスループットが向上する。このように、優先度に基づくフローレート制御は、異なるクラスのフローに対してサービスの差別化を提供する効果的な手段である。
【0007】
研究者の中には、サービスの差別化を達成するために、トランスポート層にエンド・ツー・エンドのフローレート制御を導入した者もいる(非特許文献9を参照)。しかしながら、これらの方式では、高優先度のトラフィックに対して所望のレートを保証することができない。フローのレート制御を用いたサービスの差別化に関する非特許文献9の研究は、個別化されたフローレート制御に焦点を合わせている。この場合、フローは、エンド・ツー・エンドのフィードバックに基づいたレートベクトルにより個別に制御され、高優先度フローのフローレートは低優先度フローのフローレートよりも緩やかに低下される。よって、高優先度フローのフローレートは向上するものの、所望のレベルのフローレートを保持できない可能性がある。
【0008】
また、サービスの差別化に関する他の既存のMAC層(メディアアクセスコントロール層)の解決方法として、非特許文献10乃至12に開示された技術が存在する。MANET(Mobile Ad Hoc Network)においては、MAC層内のトラフィックの優先度に従ってフレーム間隔(IFS)と競合窓(コンテンションウィンドウ:CW)のサイズとを変更しかつバックオフアルゴリズムを適宜修正することにより、QoSをサポートするいくつかの試みが行われている。しかしながら、これは、高優先度のパケットがデータ通信のための媒体に対する競合のないアクセスを常に獲得することを保証するものではない(非特許文献12を参照)。これらの方式では、媒体を求めて競合する多数の高優先度フローは、媒体に公平にアクセスすることの保証を必ずしも獲得できるわけではない。さらに、高優先度のトラフィックが存在しない場合の多数の低優先度のトラフィックは、大きい競合窓を選択する可能性があり、このことは媒体の不十分な利用に繋がる。上述の文献において取り組まれていないMAC層におけるQoSに係る他の重要な側面として、パケット伝送率がある。中間のノード無線局のMAC層における低優先度のパケットは、増大されたバックオフカウンタを選択していることがしばしば見出だされる場合があり、このカウンタ値は発信元無線局には未知のままであり、発信元無線局はそれでも非常に高いレートでパケットを注入し続けている可能性がある。その結果、低優先度フローのパケット信号を伝送する中間のノード無線局に非常に高いレートで到着するパケットは、MAC層によって迅速にサービスされることはなくキューメモリに格納されたままとなり、上記キューメモリはオーバーフローしてパケット廃棄をもたらす可能性がある。
【0009】
本発明の目的は以上の問題点を解決し、異なる複数の優先度のフローが存在するアドホック無線ネットワークにおいて、各フローの優先度に基づいて当該フローのQoSをサポートすることができ、これにより、高優先度のフローに対する低優先度フローの干渉を最小限にするように低優先度フローを制御し、高優先度のフローのスループットを向上させることができる無線ネットワークのための制御装置を提供することにある。
【課題を解決するための手段】
【0010】
本発明に係る無線ネットワークのための制御装置は、複数の無線局を備え、各無線局間で異なる優先度を有する複数のパケットフローを用いて発信元無線局から宛先無線局に対してパケット信号を伝送することによりパケット無線通信を行う無線ネットワークのための制御装置において、
各無線局は、発信元無線局から宛先無線局への低優先度フローである同一の各パケットフローについて、上記各パケットフローのパケット信号を受信したとき、当該パケットフローのパケット到着間隔(PAI)を計算してPAIテーブルとして記憶装置に記憶するとともに、所定の期間内に受信された自局で伝送しない他の高優先度のフローの数(HPF)を計数してHPFテーブルとして上記記憶装置に記憶し、
低優先度フローの無線信号を受信したパケットフローの発信元無線局以外の中継無線局は、上記PAIテーブルにおける当該パケットフローの最大のパケット到着間隔(PPAI)と、上記受信したパケットフローのパケット信号に含まれるパケットフローの最大のパケット到着間隔(PPAI)の少なくとも大きい値を有するパケット到着間隔(PPAI)及び上記他の高優先度のフローの数(HPF)を含むパケット信号を発信元無線局に向けて逆伝搬させて送信し、
高優先度フローの無線信号を受信したパケットフローの発信元無線局以外の中継無線局は、上記他の高優先度のフローの数(HPF)を含むパケット信号を発信元無線局に向けて逆伝搬させて送信し、
低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)と、上記HPFテーブル内の他の高優先度のフローの数(HPF)とに基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする。
【0011】
上記無線ネットワークのための制御装置において、低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)及び上記HPFテーブル内の他の高優先度のフローの数(HPF)から決定される設定値Rpとの誤差に基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする。
【0012】
また、上記無線ネットワークのための制御装置において、低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)及び上記HPFテーブル内の他の高優先度のフローの数(HPF)から決定される設定値Rpとの誤差に基づいて、当該誤差が最小となるように、比例積分及び微分制御(PID制御)方法を用いて、新しいパケット注入レート(PII)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする。
【0013】
さらに、無線ネットワークのための制御装置において、高優先度のフローの発信元無線局は、上記HPFテーブル内の他の高優先度のフローの数(HPF)に基づいて、当該高優先度フローのパケット注入レート(PIR)を決定し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする。
【発明の効果】
【0014】
従って、本発明によれば、異なる複数の優先度のフローが存在するアドホック無線ネットワークにおいて、各フローの優先度に基づいて当該フローのQoSをサポートすることができ、これにより、高優先度のフローに対する低優先度フローの干渉を最小限にするように低優先度フローを制御し、高優先度のフローのスループットを向上させることができる。
【発明を実施するための最良の形態】
【0015】
以下、本発明に係る実施形態について図面を参照して説明する。
【0016】
本発明に係る実施形態においては、上述の問題点を解決し、無線媒体の十分な利用が適応型レート制御に従って達成されるように、高優先度フロー(高優先度を有するパケット信号を発信元無線局から宛先無線局に対して所定の無線媒体パスのフローを介して伝送するときのセッション接続のフローをいう。)を所望のレベルに保持しながら低優先度フロー(高優先度よりも低い優先度である低優先度を有するパケット信号を発信元無線局から宛先無線局に対して所定の無線媒体パスのフローを介して伝送するときのセッション接続のフローをいう。)を適応的に最大化することができる無線ネットワークのための制御装置を提供する。ここで、高優先度フローにこの望ましいサービスの差別化を提供するためには、高優先度フローとの干渉の原因である低優先度フローがそのルート上の各ノード無線局において高優先度フローのフローレートを検出してこれを測定し、最終的に制御理論的アプローチを使用して当該低優先度フローのフローレートを調整し、高優先度フローがその所望レベルに保持されるように制御するフローレート制御アルゴリズムが必要である。この検出及び測定は、発信元無線局から宛先無線局までのルーティングに関与する各ノード無線局のMAC層において行う必要がある。
【0017】
図1は、本発明に係る一実施形態の無線通信システムであるアドホック無線ネットワークの構成を示す複数のノード無線局1−1乃至1−9(総称して、符号1を付す。)の平面配置図であり、図2は、図1の各ノード無線局1の構成を示すブロック図である。
【0018】
この実施形態の無線通信システムは、例えば無線LANなどのアドホック無線ネットワークのパケット通信システムに適用するものであって、各ノード無線局1は、無指向性のオムニパターンと、所定の方位角幅を有するセクターパターンと、上記セクターパターンを回転しながら走査する回転セクターパターンとを少なくとも用いて放射パターンの制御を実行する可変ビームアンテナ101を備え、以下の処理を実行することを特徴としている。
(i)自局のサービスエリア内の各ノード無線局1に対してオムニパターンを用いてブロードキャストで自局IDを含むビーコン信号を送信する。
(ii)回転セクターパターンを用いて上記ビーコン信号を受信し、上記ビーコン信号の方位角と信号強度レベルとノード無線局ID(すなわち、送信局ID)を検出することにより、上記複数のノード無線局1のうちのサービスエリア内の各ノード無線局1に対する、方位角と信号強度レベルを方位角及び信号強度レベルテーブル(以下、ASテーブルという。なお、ASはAngle-Signal Strengthの略である。)としてデータベースメモリ154に記憶する。
(iii)パケット信号を宛先無線局に伝送するときに、当該ASテーブルにより示される方位角のセクターパターンを用いて当該宛先無線局に対してパケット信号を送信することにより、パケット信号をルーティングする。
(iv)従来技術に係るRTS(Request To Send)/CTS(Clear To Send)信号の基本的な通信手順をベースとして用い、図4(a)に示す信号フォーマットを有するRTSパケット信号(以下、RTS信号という。)と、図4(b)に示す信号フォーマットを有するCTSパケット信号(以下、CTS信号という。)とを用いて、図15乃至図19のパケット送受信制御処理を実行することにより、以下の信号処理を実行する。
(a)低優先度フローのRTS信号又はCTS信号を受信したとき、同一のパケットフローについてパケット到着間隔(Packet Arrival Interval:PAI)を計算してデータベースメモリ154内のPAIテーブルに記憶し(図16のステップS41)、自局が当該低優先度フローの発信元無線局であるときデータベースメモリ154内のPAIテーブルにおける当該フローのパケット信号を伝搬するノード無線局において検出される最大のパケット到着間隔(Detected Maximum Packet Arrival Interval:DMPAI)及びHPFテーブル(自局の所定の時間Ta内に受信した高優先度のフローの数(以下、HPFという。)を計数してデータベースメモリ154内の高優先度フローテーブルを、以下、HPFテーブルという。)内のHPFに基づいて、PID(Proportional Integral Derivative:比例積分及び微分)制御を用いたフローレート制御方法を用いて、当該フローのパケット注入レート又はパケット注入レート(Packet Injection Rate:PIR)を計算してパケット注入レートPIRを更新する(図16のステップS43)一方、自局が当該低優先度フローの発信元無線局でなくかつ中継無線局であるときPAIテーブルにおいてDMPAIを伝搬されたPAI(Propagated Packet Arrival Interval:PPAI)として選択して当該PPAIを含むCTS信号を発信元無線局に向けて逆伝搬させる(図16のステップS44)。
(b)高優先度のフローのRTS信号又はCTS信号を受信しかつ自局が低優先度フローを伝送しないノード無線局であるとき、受信したRTS信号又はCTS信号に基づいて、所定の時間Ta内に受信した高優先度のフローの数であるHPFを計数してデータベースメモリ154内のHPFテーブルに格納して更新し(図17のステップS51)、
(b1)自局が高優先度のフローの発信元無線局でなく中継無線局であるとき上記HPFを含む高優先度のフローのCTS信号を発信元無線局に向けて逆伝搬させる(図17のステップS54)一方、
(b2)自局が高優先度のフローの発信元無線局であるとき自局のHPFテーブル内のHPFに基づいて自局が発信する高優先度のフローの無線信号のパケット注入レートPIRの設定値Rpを決定し、決定された設定値Rpに基づいて自局が発信する高優先度のフローの無線信号のパケット注入レートPIRを設定し、上記設定された無線信号の注入レートPIRに基づいて自局が発信する高優先度のフローの無線信号を制御し(図17のステップS53)、
(c)高優先度のフローのRTS信号又はCTS信号を受信しかつ自局が低優先度フローを伝送するノード無線局であるとき、受信したRTS信号又はCTS信号の時刻に基づいて、同一のパケットフローについてパケット到着間隔PAIを計算してPAIテーブルに格納し、受信した信号内のHPFを高優先度のフローのIDに対応してHPFテーブルに格納した後、
(c1)自局が低優先度フローの発信元無線局であるとき、PAIテーブルにおける当該フローのパケット信号を伝搬するノード無線局において検出される最大のパケット到着間隔DMPAIに基づいて、PID制御を用いたフローレート制御方法を用いて、当該低優先度フローのパケット注入レートPIRを計算して更新し、上記設定された無線信号の注入レートPIRに基づいて自局が発信する低優先度フローの無線信号を制御する(図16のステップS37)一方、
(c2)自局が低優先度フローの発信元無線局でなく中継無線局であるときに低優先度フローのCTS信号を受信したとき自局のPAIテーブルにおいてDMPAIを伝搬されたPAI(PPAI)として選択して当該PPAI及び受信されたCTS信号内の伝搬されたHPF(Propagated High Priority Flow:PHPF)を含むCTS信号を発信元無線局に向けて逆伝搬させる(図16のステップS39)。
(c3)また、自局が低優先度フローの発信元無線局でなく中継無線局であるときに低優先度フローのCTS信号を受信しないとき自局のHPFテーブルと受信されたCTS信号内のHPFとの平均値を、新しいPHPFとして更新し、このときに、自局が高優先度のフローの発信元無線局でなく中継無線局であるとき上記新しいPHPFを含む高優先度のフローのCTS信号を発信元無線局に向けて逆伝搬させる(図18のステップS59)一方、自局が高優先度のフローの発信元無線局であるとき上記新しいPHPFに基づいて自局が発信する高優先度のフローの無線信号の注入レートPIRの設定値Rpを決定し、決定された設定値Rpに基づいて自局が発信する高優先度のフローの無線信号の注入レートPIRを設定し、上記設定された無線信号の注入レートPIRに基づいて自局が発信する高優先度のフローの無線信号を制御する(図18のステップS58)。
【0019】
この実施形態の無線通信システムでは、図1に示すように、複数のノード無線局1が平面的に散在して存在し、各ノード無線局1はそれぞれ、可変ビームアンテナ101の利得や送信電力、受信感度などのパラメータで決定される所定のサービスエリアを有し、このサービスエリア内でパケット通信を行うことができ、サービスエリア外のノード無線局1とパケット通信を行うときは、サービスエリア内のノード無線局1を中継局として用いてパケットデータを中継することにより、所望の宛先無線局1にパケットデータを伝送する。すなわち、各ノード無線局1は、パケットのルーティングを行うルータ装置を備え、発信端末、中継局、又は宛先端末として動作する。
【0020】
次いで、図2を参照して、各ノード無線局1の装置構成について説明する。図2において、ノード無線局1は、可変ビームアンテナ101と、その指向性を制御するための放射パターン制御部103と、サーキュレータ102と、データパケット送信部140及びデータパケット受信部130を有するデータパケット送受信部104と、トラヒックモニタ部105と、回線制御部106と、上位レイヤ処理部107とを備える。
【0021】
送受信すべきデータを処理する上位レイヤ処理装置107に従って発生されたパケット形式の通信用送信信号データは、送信バッファメモリ142を介して変調器143に入力され、変調器143は、所定の無線周波数の搬送波信号を、拡散符号発生器160でCDMA方式で発生された所定の通信チャンネル用拡散符号を用いて、入力された通信用送信信号データに従ってスペクトル拡散変調して、変調後の送信信号を高周波送信機144に出力する。高周波送信機144は入力された送信信号に対して増幅などの処理を実行した後、サーキュレータ102を介して可変ビームアンテナ101から他のノード無線局1に向けて送信する。一方、可変ビームアンテナ101で受信されたパケット形式の通信チャンネル用受信信号は、サーキュレータ102を介して高周波受信機131に入力され、高周波受信機131は入力された受信信号に対して低雑音増幅などの処理を実行した後、復調器132に出力する。復調器132は、入力される受信信号を、拡散符号発生器160でCDMA方式で発生された通信チャンネル用拡散符号を用いて、スペクトル逆拡散により復調して、復調後の受信信号データを受信バッファメモリ133を介して上位レイヤ処理装置107に出力するとともに、トラヒックモニタのためにトラヒックモニタ部105に出力する。
【0022】
本実施形態においては、可変指向性アンテナである可変ビームアンテナ101は、複数のアンテナ素子とその指向性を制御する放射パターン制御部103から構成されるものであって、より具体的には、無線信号が給電される給電素子と、この給電素子から所定の間隔だけ離れて設けられ、無線信号が給電されない複数個の非給電素子と、これら各非給電素子に接続された可変リアクタンス素子とから成るアレーアンテナを備え、上記各可変リアクタンス素子のリアクタンス値を変化させることにより、上記アレーアンテナの指向特性を変化させる、特許文献2において開示された、いわゆる電子制御導波器アレーアンテナ装置を用いることができる。本実施形態においては、可変ビームアンテナ101は、例えば所定のビーム幅を有するメインビームの方向を、所定の走査間隔で電気的な制御により変更可能であり、以下の放射パターンを選択的に設定して動作する。
【0023】
(i)無指向性のオムニパターン。
(ii)所定の方位角幅を有するセクターパターン。
(iii)上記セクターパターンを所定の方位角(例えば30度)毎に回転しながら走査する回転セクターパターン。
(iv)例えば、公知の最急勾配法などの適応制御方法を用いて可変ビームアンテナ101の主ビームを所望波の方向に向けかつ干渉波の方向にヌルを向ける適応制御パターン。
【0024】
なお、可変ビームアンテナ101については、例えば、公知のフェーズドアレーアンテナ装置であってもよい。
【0025】
トラヒックモニタ部105は、検索エンジン152と、更新エンジン153と、データベースメモリ154とを備え、後述のパケット送受信制御処理を実行するとともに、ノード無線局1が他のノード無線局1とのパケット通信において使用すべき通信チャンネルを決定して、決定した通信チャンネルに対応する拡散符号の指定データを回線制御部106を介して拡散符号発生器160に送ることにより、拡散符号発生器160が当該指定データに対応する拡散符号を発生するように制御するとともに、決定した通信チャンネルに対応するタイムスロットの指定データを回線制御部106を介して送信タイミング制御部141に送ることにより、送信タイミング制御部141が送信バッファメモリ142による通信チャンネル用送信信号データの書き込み及び読み出しを制御することにより通信チャンネル用送信信号が対応するタイムスロットで送信されるように制御する。
【0026】
トラヒックモニタ部105の検索エンジン152は、管理制御部151の制御によりデータベースメモリ154内のデータを検索して検索したデータを管理制御部151に返信する。また、更新エンジン153は、管理制御部151の制御によりデータベースメモリ154内のデータを更新する。さらに、データベースメモリ154には、方位角及び信号強度レベルテーブル(ASテーブル)、パケット到着間隔テーブル(PAIテーブル)及び高優先度フローテーブル(HPFテーブル)を記憶する。
【0027】
データベースメモリ154に格納されたASテーブルは、図10に示すように、自局のサービスエリア内の隣接ノード無線局毎に、方位角と、信号強度レベルの情報を格納し、後述するパケット送受信制御処理により作成更新される。また、データベースメモリ154に格納されたHPFテーブルは、図11に示すように、高優先度フローの通信ID毎に近傍のノード無線局により伝送される他の高優先度フローの数HPFを格納する。データベースメモリ154に格納されたPAIテーブルは、図12に示すように、無線局1において定義された各方位角に対する、各高優先度フローのパケット到着間隔PAIを格納する。
【0028】
本実施形態のアドホック無線ネットワークはパケット通信システムであり、このパケット通信システムで用いるパケットデータは、図3に示す一般的な形式のフォーマットを有する。すなわち、パケットデータは、宛先のIDと、パケット種別(ビーコン、RTS、CTS、DATA、ACKなど)と、自局のIDと、データ(上位レイヤでのデータなどを含む)とを含む。なお、本実施形態では、図4(a)に示すような特殊なフォーマット形式のRTS信号と、図4(b)に示すような特殊なフォーマット形式のCTS信号を使用する。
【0029】
RTS信号は、図4(a)に示すように、宛先無線局IDフィールド、パケット種別フィールド、発信元無線局IDフィールド、通信IDフィールド、優先度レベルフィールド、HPFフィールド、伝送すべきデータのフィールドを含む。ここで、通信IDフィールドは、そのパケットが帰属するフローの通信IDを示すために付加され、優先度レベルフィールドは、そのパケットが帰属するフローの優先度レベル(すなわち、高優先度フロー又は低優先度フロー)を示すために付加されている。RTS信号における通信IDフィールド及び優先度レベルフィールドは、進行中の通信の優先度レベルを近傍のノード無線局に通知させるために必要とされる。また、HPFフィールドは、近傍無線局における他の高優先度フローの数HPFを示す。
【0030】
CTS信号は、図4(b)に示すように、当該信号が高優先度フローのCTS信号である場合には、宛先無線局IDフィールド、パケット種別フィールド、発信元無線局IDフィールド、通信IDフィールド、優先度レベルフィールド(高優先度フロー又は低優先度フロー)、HPFフィールド、PHPFフィールド、伝送すべきデータのフィールドを含む。CTS信号における通信IDフィールド及び優先度レベルフィールドは、RTS信号の場合と同様に、進行中の通信の優先度レベルを近傍のノード無線局に通知させるために必要とされる。また、CTS信号が低優先度フローのCTS信号である場合には、PPAIフィールドをさらに含む。PPAIフィールドは、その近傍における高優先度の通信の最大パケット到着間隔を示す。1つの低優先度フローの近傍に2つ以上の高優先度フローが存在する場合でも、高優先度フローの最大パケット到着間隔の逆伝搬が行われる。これは、高優先度フローが媒体にアクセスする最大の機会を得ることができてかつその期待されるパケット到着間隔が保持されるように、低優先度フローがそれ自体を繰り返し適応的に調整できることを示している。これらRTS信号やCTS信号の送受信処理については詳細後述する。
【0031】
次いで、本実施形態のアドホック無線ネットワークで用いるMAC通信プロトコルについて以下に説明する。本実施形態に係るアドホック無線ネットワークにおいて、互いに無線通信を行う1組のノード無線局1は二次元的な閉鎖空間内を動き回り、共通の無線通信チャンネルを共有するものと仮定する。各ノード無線局1は、上述の4個の放射パターンを有する、例えば電子制御導波器アレーアンテナ装置である可変ビームアンテナ101を備える。各ノード無線局1は一度に送信又は受信の何れかを実行可能であるが、1つのノード無線局1で複数の送受信を行うことはできない。
【0032】
IEEE802.11のMACプロトコル基準では、RTS/CTS/DATA/ACKアクセス制御方式を用いて、高信頼性のデータ通信が保証されているが、本実施形態の方法では、このアクセス制御方式をベースとして、ASテーブルを形成するためのフェーズが追加の命令信号や応答信号と共に加えられる。従って、データ通信は周期的な、ASテーブル生成フェーズの合間に実行される。また、各フレームにはトレーニングシーケンスが追加されて送受信アンテナによるそのビーム及びヌルの制御及び適応制御モードへの移行が可能にされる。
【0033】
図13は、本実施形態に係る4方向ハンドシェイクのアンテナモードの使用例を示している。適応制御パターンは移動中の端末を追跡することはできるが、ビーム及びヌルはパケット信号が受信されなければ形成され得ない。従って、RTS送信及びRTS/CTS受信における開始部分では、オムニパターンとセクターパターンが使用される。さらに、待ちノード無線局1は指向性RTS信号がどの方向から到着するかを認識しないため、回転セクターパターンが使用される。本実施形態に係るASテーブルの場合のRTS信号の送信時間は、特許文献1において開示された従来技術のMACプロトコルで用いるSINRテーブルにおけるRTS信号の送信時間の2倍であることに注意を要する。また、RTS信号の送信及びCTS信号の受信におけるセクターパターンのビームの方向は、図10のASテーブルから得ることができる。
【0034】
次いで、図1のアドホック無線ネットワークにおいて用いられる各ノード無線局での放射パターンの種類と無線通信プロトコルを示すタイミングチャートである図13の制御パターンについて以下に詳細に説明する。まず、送信元ノード無線局はASテーブルにより示される宛先無線局にビームを向けるセクターパターンを用いて当該宛先無線局に対してRTS信号を送信する一方、宛先無線局は回転セクターパターンを用いてRTS信号を受信し、上記RTS信号内のノード無線局IDを検出したときは、当該送信元ノード無線局のノード無線局IDに基づいて方位角及び信号強度レベルテーブルにより示される当該送信元ノード無線局にビームを向けるセクターパターンを介して適応制御パターンに変更してRTS信号を受信する。次いで、宛先無線局は、引き続き上記適応制御パターンを用いてCTS信号を送信元ノード無線局に送信する一方、送信元ノード無線局は上記セクターパターンから上記適応制御パターンに変更してCTS信号を受信することにより、宛先無線局との無線リンクを確立する。その後、送信元ノード無線局及び宛先無線局はともに上記適応制御パターンを用いてデータ信号及びACK信号の送受信を実行する。すなわち、送信元ノード無線局は適応制御パターンを用いてデータ信号を送信する一方、宛先無線局は送信されたデータ信号を適応制御パターンを用いて受信する。次いで、宛先無線局は、データ信号を受信したことの確認信号としてACK信号を適応制御パターンを用いて送信元ノード無線局に対して送信し、一方、送信元ノード無線局はこのACK信号を適応制御パターンを用いて受信する。
【0035】
図13に図示する本実施形態に係る制御パターンにおいては、RTS信号の受信から、セクターパターンから適応制御パターンに変更したアンテナの放射パターンを、宛先無線局及び送信元ノード無線局において用いているが、適応制御パターンを用いず、セクターパターンのみを用いるようにしてもよい。
【0036】
本実施形態に係る図10のASテーブルを使用する提案されたMACプロトコルにおいては、各ノード無線局1は下記のステップを周期的に実行する。
【0037】
(i)隣接ノード無線局1−i,1−j,1−kを有するノード無線局1−nは、常に回転セクターパターンを用いた受信モードで待機している。回転セクターパターンでは、ノード無線局1−nはその可変ビームアンテナ101を制御し、各方向において受信される信号を全方向における順次方向性受信の形式で検出する。本実施形態においては、30度のビーム幅を有しかつ水平面内で互いに隣接した12個のセクターパターンを順次に用いて、360度の方位角をすべて走査する。
(ii)無線チャンネルが空いている場合はいつでも、各ノード無線局1はオムニパターンを用いてビーコン信号をその近傍のノード無線局に対して送信する。提案されたこのMACプロトコルの方法においては、図14が示すように2つのパケット信号がビーコンとして順次送信される。ビーコンの第1のパケット信号は、回転セクターパターンにおける受信するノード無線局によるビーコン信号が送信中であるか否かの検出において一助となる。次いで、受信機がビーコンの第2のパケット信号を受信し、復号化する。ビーコンの第2のパケット信号は、ノード無線局IDを含んでいる。ここで、全12方向を回転する時間は、1つのパケット信号の持続時間よりも短く設定する必要がある。
(iii)回転セクターパターンでは、ノード無線局1−iがその回転の間に1つの回転セクターパターンにおいて他のノード無線局1−nからのビーコンの第1のパケットを検出すると、ノード無線局1−iはその検出されたセクターパターンにおいて回転を停止し、ノード無線局1−iからのビーコンの第2のパケットを受信する。第2のパケットの信号強度レベルが測定され、ノード無線局1−iのノード無線局IDが復号されると、検出されたセクターパターンの方位角がそのビーコン信号を送信した隣接ノード無線局1−iの方位角になる。
(iv)ノード無線局1−nは、ノード無線局1−nのASテーブルのノード無線局1−iのエントリにこれら検出された情報の書込みをする。図10において、方位角ANGLEn,i(t)は、その時刻tにおける受信されたセクターパターンのノード無線局1−iからノード無線局1−nへの方向の方位角であり、SIGNALn,i(t)はノード無線局1−nのそのセクターパターンにおけるノード無線局1−iから受信された信号レベルである。
(v)ノード無線局1−nは、ノード無線局1−i,1−j,1−kから順次ビーコン信号を受信することにより、ノード無線局1−nのASテーブルのノード無線局1−i,1−j,1−kのエントリ全体を累積して更新格納する。
【0038】
ところで、特許文献1に係る従来技術のプロトコルでは、任意のノード無線局1−nがセットアップ信号を送信してそれに基づくSINRテーブルの形成を開始する。ここで、送信機のための方位角は必ず受信機用の方位角とは異なるため、ノード無線局1−nからの方向の同報通信を行わない(例えば12個のRQパケット信号なしの)受信ノード無線局における回転セクターパターンによる方位角予測は適当でない。従って、方位角情報による12個のRQパケット信号だけでなく、REパケット信号によるセットアップパケット信号及び12個のRQパケット信号の受信機からの方位角情報の変換を使用することも必要である。また、あらゆる周辺ノード無線局から多くのセットアップパケット信号と12個のRQパケット信号を受信する各ノード無線局は、REパケット信号を介してすべての隣接ノード無線局にそれぞれ応答しなければならないという問題点を有していた。
【0039】
これに対して、本実施形態のアドホック無線ネットワークにおいて使用されるMAC通信プロトコルでは、各ASテーブルはビーコンの受信ノード無線局において作成されるため、回転セクターパターンを受信モードとして使用して無指向性ビーコンの方位角予測を行うことが可能である。各ノード無線局における異なる送信電力の非対称性リンクの問題は、ビーコンに送信電力情報を追加することにより回避することができる。結果的に、12個のRQパケット信号やREパケット信号なしであってもわずか2つのパケット信号をビーコン信号として送信すればよい。さらに、このビーコン信号はオムニパターンで送信されるために、各ノード無線局は近傍に向けてビーコン信号を一度だけ送信すれば足りる。つまり、各ノード無線局は、わずか1つのビーコン信号を送信するだけで隣接するすべてのノード無線局に受信された方位角を予測させることが可能であり、隣接ノード無線局の数だけビーコン信号を送信する必要はない。
【0040】
さらに、提案された本実施形態に係るMACプロトコルでは、各ノード無線局が隣接ノード無線局の方位角を予測する際にSINRではなく信号強度レベルをリンク品質のパラメータとして使用するために、本実施形態に係るMACプロトコルは、特許文献1に開示された従来技術のプロトコルにおける方位角毎のSINRテーブルにおける干渉の問題を回避することができる。
【0041】
各ノード無線局からのビーコンのパケット信号は、同じ送信間隔で送信される。この場合は、各ノード無線局がビーコン信号の遷移タイミングをランダムに選ぶとしても、複数のビーコン信号が同時に送信されれば、その受信機側で発生する衝突により無指向性ビーコン信号の幾つかが失われる可能性もある。オムニパターンでの受信モードではビーコン信号は復号され得ないが、回転セクターパターンでは、複数のビーコン信号をセクターパターンで分割することができる点に注意することを必要とする。ここで、この衝突の確率は、各ノード無線局1が送信間隔を選択することに従ってより低く抑えることができる。例えば、当該無線ネットワークシステムにおける基準周期時間間隔tiに対する持続時刻tdのウィンドウからランダムなタイミングを選択することができる(td<ti)。
【0042】
次いで、本発明に係る実施形態のアドホック無線ネットワークにおいて用いるフローレート制御方式について、すなわち、パケット注入レートを制御することによってサービスを差別化する方法について以下に説明する。
【0043】
図5は、従来技術における問題点を示す図であって、オムニアンテナを用いたとき、ルートカップリングに起因して低優先度フロー(S2−D2)が高優先度フロー(S1−D1)を妨害する(又は2つのフローが競合する)場合を示す平面図であり、ここで、点線はオムニアンテナを用いたことに起因するノード無線局間の無線接続を示す。
【0044】
低優先度フローのルート上の各ノード無線局は高優先度フローのフローレートを検出してこれを測定するが、この検出及び測定は、発信元無線局から宛先無線局までのルーティングに関与する各ノード無線局のMAC層において行う必要がある。詳しくは、低優先度フローのパケット信号を伝送するノード無線局(例えば図5のノード無線局S2,N2,N3,D2)は、高優先度フローのパケット信号を伝送するノード無線局(例えば図5のノード無線局S1,N1,D1)からの連続的なRTS信号及び/又はCTS信号の受信間隔を記録することにより、低優先度フローのパケット信号を伝送するノード無線局の各近傍における高優先度フローのフローレートを測定できるようになる。例えば、図5の例では、ノード無線局N3は、高優先度フローのパケット信号を伝送するノード無線局N1からRTS信号を受信し、各時刻における高優先度フローのフローレートを測定することができる。測定されたフローレートの情報は、低優先度フローの発信元無線局であるノード無線局S2に逆伝搬され、ノード無線局S2は、高優先度フローのフローレートをその所望レベルに保持するために、計算により制御量を決定してそのパケット注入レートを適応的に調整する。
【0045】
例えば図5において、連続的な低優先度フローであるフロー「S2−N2−N3−D2」(又は、フロー「S2−D2」と表記する。)が存在したとする。このフローが単独で動作する場合、そのフローレートは予め定義された値に固定される。ここで、高優先度フローであるフロー「S1−N1−D1」(又は、フロー「S1−D1」と表記する。)が動作を開始する。この高優先度フローのフローレートを予め定義されたレベルに固定して保持することを所望していると仮定する。しかしながら、図5におけるこれらの2つのルートはルートカップリングを発生させるほど十分に近接しているため互いに干渉し合い、これにより、高優先度フローのフローレートは、低優先度フローとの間で干渉しているノード無線局N1及びD1において低下する。
【0046】
本実施形態に係るフローレート制御方式を構築する際における本発明者らの目的は、低優先度フローに属するノード無線局において、高優先度フローのフローレートの低下を検出し、かつ検出された低下についての情報を低優先度フローの発信元無線局へ逆伝搬して戻すことにあり、これにより、低優先度フローの発信元無線局は、低優先度フローのフローレートを適応的に低下させて、高優先度フローのフローレートをその予め定義された値に保持することができる。
【0047】
これを実行するに当たって、ノード無線局N3及びD2はともに、ノード無線局N1によって送信されるRTS信号とノード無線局D1によって送信されるCTS信号とから、高優先度フロー「S1−D1」の存在を検出する。高優先度フロー「S1−D1」が検出されたことは、この高優先度フローから遠く離れた、低優先度フローの発信元無線局S2には未知のままである。よって、ノード無線局D2は、CTS信号の援助により、高優先度フロー「S1−D1」が検出されたという情報をノード無線局N3に送信する。ノード無線局N3は、ノード無線局N2にCTS信号を送信しなければならない際に、それ自体が検出した高優先度のトラフィックについての情報と、ノード無線局D2から受信した情報(すなわち、ノード無線局D2において高優先度フロー「S1−D1」が検出されたという情報)とを結合し、フロー内の競合についての1つ又は複数の情報を重複的に考慮して、CTS信号を用いてこれをノード無線局N2に送信する。次に、ノード無線局N2は、CTS信号を用いて、ノード無線局N3から受信された情報とノード無線局N2において取得された情報とをノード無線局S2に送信して戻す。最後に、発信元無線局であるノード無線局S2は、フローの媒体における競合を考慮して、適応的にパケット注入レートを低下させるように決定する。ゆえに、媒体における高優先度フローとの競合についての情報は、余分なパケットの送信を必要とせずに、低優先度フローの発信元無線局S2へ送信され、この発信元無線局S2は低優先度フローのパケット注入レートを適応的に低下させる。以上のようなシステムによれば、媒体内に競合が存在しない場合には、低優先度フローであってもその予め定義されたフローレートで動作することができる。
【0048】
本実施形態では、高優先度フローが低優先度フローと競合する場合に、高優先度フローへのフローレートに関して特定レベルのサービス保証を達成しようとしている。このために、本願明細書では、オムニアンテナ(無指向性アンテナ)を使用するオーバーヘッドの極めて少ないプロトコルを用いたフローレート制御方式を提案し、次いで、全体のスループットが向上するように指向性アンテナを使用してこのフローレート制御方式を変形した実施形態を提案する。
【0049】
次に、本実施形態のアドホック無線ネットワークにおいて使用されるフローレート制御方式の原理として用いている、制御理論的アプローチについて説明する。なお、本願明細書において、数式がイメージ入力された墨付き括弧の数番号と、数式が文字入力された大括弧の数番号とを混在して用いており、また、当該明細書での一連の数式番号として「式(1)」の形式を用いて数式番号を式の最後部に付与して用いることとする。
【0050】
まず、本実施形態で使用されるフローレート制御方式に係る制御理論的アプローチである比例積分微分(PID)制御方式に関するいくつかの準備段階から説明する。
【0051】
図6は、基本的な帰還型コントローラ装置の構成を示すブロック図である。帰還型コントローラ装置を、測定可能なプロセス変数である出力信号Yを設定値として、周知の所望の設定値R(設定値信号)の方向へ駆動すべくプロセスに何らかの制御を働かせる制御信号の出力uを発生させるように設計する(図6)。帰還型コントローラ装置は、アクチュエータを使用してプロセスに作用し、センサを使用して結果を測定する。
【0052】
図6において、帰還型コントローラ装置は、減算器11tと、コントローラ12と、制御対象のプラント装置13とを備えて構成される。加算器11は入力される設定値信号Rから、プラント装置13から出力される出力信号Yを減算して、減算結果の信号であるトラッキング誤差信号eをコントローラ12に出力する。コントローラ12は、入力されるトラッキング誤差信号eに基づいて所定の制御方法を用いて制御するための制御信号uを発生してプラント装置13に出力する。プラント装置13は、入力される制御信号uに基づいてその動作が制御され、そのときのプラント装置13からの出力信号Yが減算器11に出力されるとともに、外部装置に出力される。
【0053】
以上説明したように、図6の帰還型コントローラにおいては、設定値信号(R)とプロセス変数である出力信号(Y)の測定値との誤差信号eを観察することによりその出力信号を決定する。誤差信号eは、プロセス上の外乱又は負荷がプロセス変数を変更すると発生するが、図6の帰還型コントローラ装置の役割は、この誤差信号eを自動的に排除して0にすることにある(例えば、非特許文献13参照。)。
【0054】
初期の帰還型制御装置は、その制御構成において明示的又は暗示的に比例積分及び微分(PID)制御の各動作の考案を使用した。ここで、PID制御を厳密に理論的に考察したのは、1922年に発表されたミノルスキー(Minorsky)による船舶操舵に関する現象研究であった(例えば、非特許文献14参照。)。PIDコントローラは、現代の産業プロセスにおいていまだ最も広範囲に使用されている制御構成である(例えば、非特許文献15参照。)。ここで、PID制御アルゴリズムの一般式は、次式で表される。
【0055】
【数1】
【0056】
ここで、変数(e)は、減算器11により計算され、所望の入力値である設定値信号(R)と実際の出力信号(Y)との差であるトラッキング誤差信号を表す。この誤差信号(e)はPIDコントローラ12に送られ、PIDコントローラ12はこの誤差信号eの導関数及び積分の双方を計算する。PIDコントローラ12を通過した直後の制御信号(u)は、この時点で、比例利得(Kp)×誤差信号の大きさ(e)+積分利得(Ki)×誤差信号(e)の積分+微分利得(Kd)×誤差信号(e)の導関数に等しい。
【0057】
比例利得(Kp)は、制御信号uの立ち上り時間を短縮する効果を有し、かつ定常状態の誤差を、完全に排除はしないものの低減させる。積分利得(Ki)は定常状態の誤差を排除する効果を有するが、過渡応答を悪化させる場合がある。微分利得(Kd)は、システムの安定度を高め、オーバーシュートを低減し、過渡応答を向上させる効果を有する。上記の式はPIDコントローラ12の連続表示の式であり、離散表示に変換されなければならない。これを行う方法は幾つか存在するが、一次有限差分を使用するものが最も簡単である。ここで、比例する誤差項も、やはり基準値と現在値との誤差を用いる。微分項及び積分項は、次式で置き換えできる。
【0058】
【数2】
【数3】
【0059】
ここで、wは積分制御のウィンドウである。従って、上記式の最終形式は、次式で表される。
【0060】
【数4】
【0061】
従って、所望の出力信号Yを計算するためには、現在の誤差、誤差合計及び誤差の最近の変化を求めることが必要になる。
【0062】
次に、以上説明したPID制御方式を図1のアドホック無線ネットワークに適用した場合の、優先度に基づいたフローレート制御方法について説明する。
【0063】
図7は、図6のフィードバックコントローラを図1のアドホック無線ネットワークに適用した場合の、優先度に基づいたフローレート制御装置を概略的に示すブロック図である。図7は、図1のアドホック無線ネットワークにおいて単一の高優先度フローと複数n個の低優先度フローとが存在する場合に、当該ネットワーク内の基本的なフローレート制御を1つのフローレート制御装置として概略的に示している。
【0064】
図7のフローレート制御装置は、高優先度フローの設定値信号Rpからフィードバック信号である出力信号Yを減算して、その減算結果であるトラッキング誤差信号eを出力する減算器20と、各低優先度フローL1,…,Lnの発信元無線局にそれぞれ設けられ、トラッキング誤差信号eの入力に基づいて、各低優先度フローL1,…,LnのフローレートをPID制御する低優先度フローコントローラLPC1,…,LPCnからなるフローコントローラ21と、1つの高優先度フローH及びn個の低優先度フローL1,…,Lnのパケット信号を伝送するネットワークにおけるフローシステム22と、各低優先度フローL1,…,Lnのパケット信号を伝送する無線局にそれぞれ設けられ、これら各低優先度フローL1,…,Lnのパケット信号と結合する高優先度フローHのフローレートを測定し、当該フローレートを逆伝搬させるシステム23とを備えている。従って、フローコントローラ21によってそれぞれ制御された各低優先度フローL1,…,Lnのフローレートが図6のコントローラ11の制御信号uに対応し、図7のフローシステム22からの出力信号が図6の出力信号Yに対応し、当該出力信号Yはシステム23により逆伝搬されて減算器20にフィードバックされる。
【0065】
図7の説明では、特に、無線ネットワーク内の単一の高優先度フローと複数n個の低優先度フローが互いにカップリングされる場合、すなわちこれらのフローのルートは(1つ又は複数の)共通のノード無線局を共用し、もしくは互いに干渉し合うほど十分に近接しているかの何れかである場合を仮定する。この場合、高優先度フローを所望のフローレートの設定値Rpに保持するために、各低優先度フローは、高優先度フローのフローレートの出力信号Yが可能な限り設定値Rpに近づくように、PID制御方式を用いて各低優先度フローの発信元無線局においてそのフローレートの制御信号uを適応的に変化させている。各低優先度フローは、高優先度フローを保護するために同様の制御方式を使用している。各低優先度フローLiのパケット信号を伝送するノード無線局は、高優先度フローとのカップリングが存在すれば、その高優先度フローのフローレートを測定して、測定値Miを取得する。この情報は、低優先度フローのパケット信号をそれぞれ発信した各発信元無線局SLに逆伝搬される。これにより、各低優先度フローLiの発信元無線局はフローレートYを決定し、PID制御方法を用いて当該制御処理が実行される。これに基づいて、各低優先度フローの発信元無線局は当該低優先度フローのフローレートを調整し、当該プロセスが反復される。
【0066】
上述した従来技術のPIDコントローラと、本発明に係る実施形態において用いられるフローレート制御方式との間には、重大な違いがあることは注目すべき点である。本実施形態において用いられるフローレート制御方式では、低優先度フローコントローラLPC1,…,LPCnの出力信号値u(すなわち低優先度フローのフローレート)をゼロに設定するとき、他に低優先度フローがまったく存在しなければ、高優先度フローのフローレートYはその所望のフローレートの設定値Rpに達することが容易に分かる。よって、高優先度フローのフローレートを所望の値に保持する課題だけに焦点が合わされていれば、この解決方法は従来的な意味でのコントローラをまったく必要としない。しかしながら、本実施形態に係るアドホック無線ネットワークにおける目的は、高優先度フローのフローレートの設定値RpHをその所望レベルに保持しつつ低優先度フローのフローレートの設定値RpLを最大化することにある。これは、最大−最小(max-min)フローレート制御に類似するものであり、この場合、本実施形態において用いられるフローレート制御方式は、高優先度フローのフローレートの設定値RpHをその所望値より低下させることなしに低優先度フローのフローレートの設定値RpLをさらに増加させることができなくなるような方法で、設定値RpLの値を動的に調整しかつ制御することにより、設定値RpHをその所望のレベルに保持する。この種の必要条件は従来のPID制御には存在せず、よって、本発明に係る実施形態のアプローチは従来技術のPID制御方法に対して新規性を有するものである。引き続き、これについて説明する。
【0067】
無線通信システム内に複数の高優先度フローが複数の低優先度フローとともに存在し、これらが互いにカップリングされている場合、単一の高優先度フローに割り当てられる所望のフローレートの設定値Rpはもはや有効ではない。これは、低優先度フローが存在しないときであっても、2つ以上の高優先度フローの間のカップリングにより、高優先度フローのすべてがそれらのフローレートを保持する余地がないからである。よって、複数の高優先度フローが互いにカップリングされる場合には、高優先度フローのための新たな設定値を動的に決定する必要がある。例えば、単一の高優先度フローが毎秒50パケットの保証されたフローレートで動作することを無線通信システムが許容しているとき、この同じシステムは、システム内に2つのカップリングされた高優先度フローが存在する場合に同一のフローレートを保証することはできない。この場合、各高優先度フローに保証されるフローレートは、例えば毎秒30パケットになる。そして他の低優先度フローは、この時点で、各高優先度フローに割り当てられた新たなフローレートを保護しようとする。
【0068】
分散環境において高優先度フローの設定値を動的に変化させるために、各高優先度フローは、その近傍における他の高優先度フローの存在をモニタリングする。高優先度フローH1がその近傍にもう1つの高優先度フローH2を検出し、これらの2つの高優先度フローが互いにカップリングされる可能性が生じる場合には、フローH1は、その設定値を、予め定義された値Rnew1に変化させる。ここで、R>Rnew1であり、単位はパケット/秒とする。同様に、高優先度フローH2も高優先度フローH1を検出し、同じくその設定値を値Rnew1に変化させる。
【0069】
また、高優先度フローH1がその近傍に2つの高優先度フローを検出すれば、高優先度フローH1は、その設定値を、予め定義された他の値Rnew2に変化させる。これらの設定値は、実験により予め定義される場合もあり、また最適な媒体利用のために適応的に計算されることも可能である。後述のシミュレーションでは、簡単化のために、設定値は実験で予め定義されていることを仮定している。
【0070】
高優先度フローH1のフローレートの設定値が値Rnew1又はRnew2に変更された後で、指定された時間期間にわたって高優先度フローH1がその近傍に他の高優先度フローの存在を何ら検出しなければ、高優先度フローH1のフローレートの設定値は元の値Rに戻される。
【0071】
低優先度フローはその近傍における高優先度フローのフローレートを測定し、さらに高優先度フローの設定値を取得する。低優先度フローは、これに応じてそのフローレートを調整し、最も弱い高優先度フローを保護する。本実施形態における「最も弱い高優先度フロー」とは、当該高優先度フローの設定値が値Rnewであるときに、最大の誤差信号値e=(Rnew−Y)を有するフローである。以上述べた低優先度フローの処理は、当然ながらその近傍における他の高優先度フローの保護を保証する。
【0072】
次に、指向性の可変ビームアンテナ101を使用するフローレート制御方式の実装について説明する。
【0073】
ここまでは、図5を参照し、近傍ノード無線局として、オムニアンテナを使用する無指向性のノード無線局が存在する場合について考察した。しかしながら、図2のように、指向性の可変ビームアンテナ101を用いたアドホック無線ネットワークに適応させるように、本実施形態に係るフローレート制御方式を変形するためには、指向性のMACと、その指向性の近傍ノード無線局とについて考察する必要がある。本発明者らは、非特許文献16及び17において、近傍ノード無線局のロケーションを追跡する能力のある、受信機が使用する回転セクタに基づく指向性MACプロトコルを実装した。従って、各ノード無線局1−nは、その近傍に位置しかつ指向性の可変ビームアンテナ101を備えたノード無線局1−mを認識し、この情報は各ノード無線局1−n内のデータベースメモリ154に格納された方位角及び信号強度テーブル(ASテーブル)に記録される。
【0074】
ある実施形態では、RTS信号及びCTS信号は無指向性のアンテナパターンを用いて送信されるのに対して、データパケット信号及びACKパケット信号は指向性のアンテナパターンを用いて送信される。アドホック無線ネットワークにおける指向性の可変ビームアンテナ101の使用により、無線干渉を大幅に低下させることが可能であり、従って、無線媒体の利用は向上する(非特許文献8、16及び17を参照)。指向性の可変ビームアンテナ101のこの特性は、本発明の実施形態に係るフローレート制御方式のプロトコルの効率を改善するために使用される。
【0075】
図8は以上のことを示し、本実施形態において、セクターパターンのアンテナパターンを可変ビームアンテナ101に設定して用いたとき、低優先度フロー(S2−D2)が高優先度フロー(S1−D1)と同時に存在することができることを示す平面図である。図8の状況では、図5の同時に存在する高優先度のトラフィック「S1−D1」及び低優先度のトラフィック「S2−D2」は、可変ビームアンテナ101を各ノード無線局S1,N1,D1,S2,N2,N3,D2に設けることによって、互いに妨害し合うことなく共存することが可能である。オムニアンテナを使用する場合(図5)、このことは不可能であろう。よって、指向性の可変ビームアンテナ101を用いた場合、低優先度のトラフィック「S2−D2」は、高優先度のトラフィック「S1−D1」が存在していても、当該トラフィック「S2−D2」のパケット注入レートを制御する必要がない。指向性の可変ビームアンテナ101を使用すれば、優先度レベルの異なる複数のトラフィックが近接して存在していてもフロー方向にある通信からの競合だけが考慮されるという意味において、媒体における競合の検出もまた「指向性」になる(すなわち、所定の方位角における競合を検出する)。
【0076】
MAC(メディアアクセスコントロール)は、そのASテーブルを調べて、媒体における所定の方位角における競合を検出する。指向性の可変ビームアンテナ101はSDMA(空間分割多重アクセス)の効率を向上させるので、これは媒体内の他のフローの妨害を最小限に抑えながら低優先度フローのパケット注入レートをも増大させ、よって、高優先度のトラフィック及び低優先度のトラフィックのスループットが増大するに至る。それと同時に、複数の高優先度フローがカップリングされる機会は減少され、高優先度フローの性能が改善されることになる。
【0077】
次に、本実施形態に係るフローレート制御方式における、ある高優先度フローの、他のフローによる検出及び当該高優先度フローのフローレートの測定について説明する。
【0078】
フローによるパケット信号の送信が開始されると、パケット信号は、複数のホップを介し、かつMAC層において送信され、中間の各ノード無線局におけるパケット配送は、RTS信号、CTS信号、DATA信号及びACK信号の交換によって確認される。本実施形態において、RTS信号及びCTS信号は、低優先度フローの発信元無線局においてパケット注入レート制御に対して下される決定に関する、フローに関連した情報を検出しかつ逆伝搬するために使用される。
【0079】
図8が示すように、低優先度フローは、低優先度フローと高優先度フローの向きが重なる場合にのみ、当該高優先度フローに干渉する。図8では、ノード無線局N1及びN3は、互いに、オムニパターンのアンテナパターンを用いた場合の送信レンジ内にあるが、ノード無線局N1からノード無線局D1へのフローは、ノード無線局N3からノード無線局D2へのフローに干渉しない。これを保証するためには、低優先度フローにおける各ノード無線局は、当該ノード無線局の可変ビームアンテナ101によって低優先度フローの方向に形成された送信ゾーンが、高優先度フローのパケット信号を伝送するノード無線局を含むか否かを検出することが不可欠である。送信ゾーンがそのようなノード無線局を含むならば(すなわち干渉が存在するならば)、このことは、低優先度フローが高優先度フローを妨害することを含意し、必然的に低優先度フローのフローレートを制御して高優先度フローのフローレートを保護する必要がある。以下、任意のノード無線局1−nが高優先度フローを検出しかつ当該高優先度フローのフローレートを測定するための機構を定式化する。そのために、まず、いくつかのパラメータを定義する。
【0080】
<定義1>ノード無線局1−nが、可変ビームアンテナ101を用いて、送信レンジ(送信半径)Rで方位角α及びビーム幅(角度)βの送信ビームを形成するとき、方位角αにおけるノード無線局1−nの有効到達範囲をノード無線局1−nの送信ゾーンTZn(α,β,R)と定義する。図9に、この送信ゾーンTZn(α,β,R)を示す。これは、ノード無線局1−mが送信ゾーンTZn(α,β,R)内にありかつノード無線局1−mが受信モードにある場合に、ノード無線局1−nが、当該ノード無線局1−nに関する送信方位角α、ビーム幅β及び送信レンジRでメッセージを送信するときはいつでも、上記メッセージがノード無線局1−mによって受信されることを含意する。ノード無線局1−mが送信ゾーンTZn(α,β,R)の外に移動すると、ノード無線局1−nとノード無線局1−mとの間の接続性は失われる。本実施形態では送信ビーム幅(角度)β及び送信レンジZが一定であるので、後の議論では、送信ゾーンTZn(α,β,R)を送信ゾーンTZn(α)と呼ぶ。
【0081】
<定義2>RRTHi,α,n(t)(RTS信号受信時刻)は、その時点で高優先度フローHiを取り扱っている任意のノード無線局から、ノード無線局1−nが、ノード無線局1−nに関する方位角αでRTS信号を受信する時刻tと定義される。
【0082】
<定義3>PAIHi,α,n(t)(パケット到着間隔)は、ノード無線局1−nにおいて、時刻tに、ノード無線局1−nに関する方位角αで高優先度フローHiから受信される、2つの連続的なRRTの受信時刻の間隔と定義される。これは、指向性の可変ビームアンテナ101を備えた任意のノード無線局1−nにより、その近傍における高優先度フローのフローレート(すなわち、単位時間当たりのパケット数:1/PAIHi,α,n(t))を測定するために使用される。この定義により、次式が成り立つ。
【0083】
[数1]
PAIHi,α,n(t)
=RRTHi,α,n(t)−RRTHi,α,n(tprevious) (5)
【0084】
ここで、RRTの以前の受信時刻tpreviousは、t−Δt<tprevious≦tを満たす。Δtは、ノード無線局1−nに到着する2つのRTS信号の有効な連続性を保証するために導入される時間周期である。例えば、ノード無線局1−nが、ランダムなチャンネル誤差、衝突又は移動性に起因してRTS信号を受信し損なえば、ノード無線局1−nは誤ったフローレートを計算する可能性がある。このようなアドホック無線ネットワークにおいて、時間周期Δtの導入は必要である。RTS信号を発行することのない高優先度フローの宛先無線局の場合、その高優先度フローの宛先無線局において高優先度フローのフローレートを計算するために、CTS信号受信時刻がモニタリングされる。
【0085】
<定義4>PAITn(t)(PAIテーブル)は、図12に示されたような、各方位角αにおける各高優先度フローHiのパケット到着間隔PAIHi,α,n(t)を記憶した、ノード無線局1−nにおける時刻tでのパケット到着間隔テーブルと定義される。
【0086】
これで、ノード無線局1−nにおける低優先度フローが高優先度フローとの競合を発生させているか否かは、低優先度フローの送信方向又は送信ゾーンと、そのゾーン内で進行中の高優先度の通信とに依存する。ここで、ノード無線局1−nにおける低優先度フローは、ノード無線局1−nに関する送信ゾーンTZγを使用しているものと仮定する。言い替えれば、送信ゾーンTZγの方位角γは、ノード無線局1−nにおける、ある時刻tでの低優先度フローの向きである。ノード無線局1−nにおけるこの低優先度フローがその近傍における任意の高優先度フローとの競合を発生させているか否かは、送信ゾーンTZγの方位角γ方向におけるPAIテーブルのエントリに依存する。すなわち、送信ゾーンTZγの方位角γ方向において、PAIテーブルが{<PAIHj,γ,n(t)><PAIHk,γ,n(t)>…}のような高優先度フローに関する何らかのPAIのエントリを含んでいる場合には、低優先度フローのレート調整のために、次式で定義される高優先度フローに関するPAIの最大値MAXPAI(γ,t)が、当該低優先度フローの発信元無線局に逆伝搬される必要がある。
【0087】
[数2]
MAXPAI(γ,t)
=MAX{<PAIHj,γ,n(t)>,<PAIHk,γ,n(t)>,…} (6)
【0088】
MAXPAI(γ,t)は、低優先度フローのパケット信号を伝送するノード無線局が、これらのPAI値の最大値がフローレートの最小値を示すという意味において最も影響される高優先度フローを識別することを援助することは注目すべき点である。従って、この低優先度フローは、この最大のPAIを保護するために当該低優先度フローのフローレートを調整するように試み、これにより、PAIの最大値を有する高優先度フローだけではなく、他の高優先度フローも自動的に保護される。
【0089】
次に、低優先度フローの発信元無線局による、高優先度フローのフローレートの分散測定技術について検討する。発信元無線局Sから宛先無線局Dへのルート「S→N1→…→Nk−1→Nk→Nk+1→…→D」が低優先度フローであるとすると、各ノード無線局は、PAIHi,α,Nk(t)を用いて、高優先度フローのフローレートを独立に測定している。低優先度フローの各ノード無線局で測定される高優先度フローのフローレートは、互いに異なっている可能性がある。ただし、制御決定を下すためには、低優先度フローの発信元無線局は、フローレートのボトルネック情報、すなわち、フロー「S→N1→…→Nk−1→Nk→Nk+1→…→D」における各ノード無線局で測定されたすべてのフローレート値のうちの最低値を認識する必要がある。言い替えれば、発信元無線局Sは、低優先度フロー「S→N1→…→Nk−1→Nk→Nk+1→…→D」の全ノード無線局におけるMAXPAIの最大値を知る必要がある。
【0090】
議論を簡単化するため、これまでは1つだけの低優先度フローが存在する場合について考察してきた。しかしながら、1つのノード無線局は複数の低優先度フローに含まれている可能性がある。よって、MAXPAIを、任意の方位角γの絶対値ではなく、フローの通信ID及びその通信IDに係るフローの向きに関連付ける必要がある。そこで定義5において、MAXPAIの定義を下記のように変更する。
【0091】
<定義5>DMPAI(Nk)Li(t)又は時刻tにおいて低優先度フローLiのパケット信号を取り扱って伝送するノード無線局Nkで検出される最大パケット到着間隔を、ノード無線局Nkで検出される低優先度フローLiの向きにおける高優先度フローの最大PAIと定義する。
【0092】
<定義6>PPAI(Nk)Li(t)(伝搬パケット到着間隔)は、低優先度フローLiの一部「Nk+1→…→D」の各ノード無線局によって測定された値であって、ノード無線局Nk+1からの、ノード無線局Nkにおける、高優先度フローの最大のPAIの伝搬された値である。よって、次式が成り立つ。
【0093】
[数3]
PPAI(Nk)Li(t)
=MAX{DMPAI(Nk+1)Li(t),…,DMPAI(D)Li(t)} (7)
[数4]
PPAI(Nk−1)Li(t)
=MAX{DMPAI(Nk)Li(t),PPAI(Nk)Li(t)} (8)
【0094】
よって、PPAI(S)Liは、低優先度フローLiの発信元無線局Sによって最終的に検出される、高優先度フローの最大パケット到着間隔である。低優先度フローLiの発信元無線局Sは、この情報を使用して低優先度フローLiのフローレートを適応的に制御する。
【0095】
次に、本実施形態に係るフローレート制御方式における、低優先度フローのフローレートのフィードバック制御について説明する。
【0096】
以下の議論では、発信元無線局におけるパケット注入間隔(PII)を、フローレートを制御するための尺度として考慮している。発信元無線局におけるフローのパケット注入レートPIR「パケット/秒」は、次式により計算される。
【0097】
[数5]
PII=1/PIR (9)
【0098】
例えば、発信元無線局におけるPIIが20ミリ秒(msec)であれば、PIR=50パケット/秒である。
【0099】
フローレートに対して何らかの制御決定を下すためには、前述のように、まずPIDコントローラにおける誤差項を計算する必要がある。従って、次式の誤差信号値eを用いる。
【0100】
[数6]
「任意の低優先度フローLiのその発信元無線局Sにおける誤差信号値e」
=Rp−PPAI(S)Li (10)
【0101】
ここで、Rpは、高優先度フローの所望されるPAIであり、この値Rpを設定値として用いる。PPAI(S)Liは、低優先度フローLiにおけるノード無線局によって検出されかつ低優先度フローLiの発信元無線局Sへ逆伝搬される、低優先度フローLiの近傍における高優先度フローの最大パケット到着間隔である。各高優先度フローは予め指定されたパケット注入レートの設定値Rpを有し、このパケット注入レートの設定値Rpは、高優先度フローがいかなる競合に直面する必要もないときは、任意の中間のノード無線局におけるパケット到着間隔に対応するはずであることが仮定される。ネットワーク内のすべてのノード無線局がこの値を認識し、これは所望の高優先度フローのPAIに対応している。前述した通り、複数の高優先度フローが存在するアドホック無線ネットワークにおいては、高優先度フローH1がその近傍においてもう1つの高優先度フローH2を検出し、これらの2つの高優先度フローがカップリングされる可能性がある場合には、フローH1及びH2は、それらの設定値を、予め定義された新しい値Rnewに変更し、この情報がこれらの近傍における低優先度フローに伝送される。フローH1が、設定値を値Rnewに変更した後で、指定された時間期間にわたってその近傍において他の高優先度フローの存在を検出しなければ、フローH1のフローレートは設定値Rpに戻る。
【0102】
誤差信号値e(n)及び連続する2つの誤差信号値間の時間周期Δtが計算されると、低優先度フローLi(S)のPIIは、次式のように計算される。
【0103】
【数5】
【0104】
パラメータkp,ki及びkdの値は、最適な性能を得るように調整する必要がある。以上説明したコントローラを実装したアドホック無線ネットワークの性能についてのシミュレーション結果を後述する。
【0105】
図15乃至図19は、本実施形態に係るフローレート制御方式として、図2のノード無線局1の管理制御部105によって実行されるパケット送受信制御処理を示すフローチャートである。
【0106】
図15において、まず、ステップS1において回転セクターパターンで可変ビームアンテナ101を所定方位角(例えば、30度)毎に変化して回転走査するように制御して受信信号を受信し、ステップS2において所定のしきい値以上の信号強度レベルの受信信号を受信したか否かが判断され、YESのときはステップS3に進む一方、NOのときはステップS8に進む。ステップS8において送信すべきパケット信号があるか否かが判断され、YESのときはステップS9に進む一方、NOのときは図19のサブルーチンであるPAI削除処理のステップS12を実行した後、ステップS1に戻る。ステップS9において送信すべきパケット信号はビーコン信号であるか否かが判断され、YESのときはステップS10に進む一方、NOのときはステップS11に進む。ステップS10においてオムニパターンでビーコン信号を送信した後、ステップS1に戻る。一方、ステップS11においてその他の信号をセクターパターン又は適応制御パターンで送信し、すなわち、図13に示すように、各信号に応じて対応する放射パターンで送信を行った後、ステップS1に戻る。
【0107】
ステップS3では、回転セクターパターンを停止して、可変ビームアンテナ101の放射パターンを、停止した所定の方位角に向けるセクターパターンに設定する。次いで、ステップS4において適応制御パターンで受信信号を受信し、パケット情報を復号化し受信信号の信号強度レベルを測定し、ステップS5において受信信号はビーコン信号か否かが判断され、YESのときはステップS6に進む一方、NOのときはステップS7に進む。ステップS6においてパケット情報内のノード無線局IDと検出された方位角と信号強度レベルに基づいてASテーブルの内容を更新した後、ステップS1に戻る。一方、ステップS7において、図16乃至図18のサブルーチンであるその他の信号の受信処理を実行した後、ステップS1に戻る。
【0108】
図15の制御フローにおいては、ステップS1,S2において、可変ビームアンテナ101を回転走査して所定のしきい値以上の信号強度レベルの受信信号を受信したときに、その受信信号を検出しているが、本発明はこれに限らず、可変ビームアンテナ101を360度にわたって回転走査して、所定のしきい値以上の信号強度レベルの受信信号を受信しかつそのうちの最大の受信信号を、検出された受信信号としてもよい。
【0109】
図16乃至図18は図15のサブルーチンであるその他の信号の受信処理(ステップS7)を示すフローチャートである。
【0110】
図16のステップS31において、まず、高優先度フローのRTS信号又はCTS信号を受信したか否かが判断され、YESのときはステップS34に進む一方、NOのときはステップS32に進む。ステップS32においてPPAIとPHPFの両方を含む低優先度フローのCTS信号を受信したか否かが判断され、YESのときはステップS40に進む一方、NOのときはステップS33においてその他の受信処理を実行した後、元のメインルーチンに戻る。ここで、ステップS33のその他の受信処理は、受信された低優先度フローのRTS信号をそのまま宛先無線局に向けて中継伝搬させる処理を含む。
【0111】
ステップS34においては、自局が低優先度フローのパケット信号を伝送する無線局であるか否かが判断され、YESのときはステップS35に進み、NOのときは図17のステップS51に進む。ステップS51において、受信したRTS信号又はCTS信号に基づいて、所定時間Ta内に受信したHPFの値を1だけインクリメントした後、更新したHPFの値を、高優先度のフローのIDに対応してHPFテーブルに格納する。このステップでは、高優先度フロー(例えば、フローHiとする。)のパケット信号を取り扱って伝送するノード無線局において、RTS信号又はCTS信号を受信すると、そのノード無線局がこれまでに所定の時間内に受信したHPFの値を1だけインクリメントする。その上で、そのインクリメントされたHPFの値を、そのノード無線局が取り扱っているフローH1の通信IDに対応したHPFとして格納する。つまり、高優先度フローHiのパケット信号を取り扱って伝送するノード無線局では、常に自局のノード無線局の通信エリア内における他の隣接した高優先度フローHj(i≠j)の数をモニタリングし、自局で取り扱っているフローHiのHPFの値を更新する。
【0112】
次いで、ステップS52において、自局が高優先度フローの発信元無線局か否かが判断され、YESのときはステップS53に進み、NOの時はステップS54に進む。ステップS53において、自局のHPFテーブルのHPFから決まる設定値Rpに基づいて高優先度フローのPIRを計算してパケット注入レートPIRを更新する。その設定値Rpは、予め決められた定数rと、HPFテーブルに格納されている中で、自局で取り扱っているフローに対するHPFの値とに基づいて、次式を用いて計算される。
【0113】
[数7]
HPF=0のとき:Rp=r,
HPF=1のとき:Rp=r/2,
HPF=2のとき:Rp=r/3,
...........
HPF=nのとき:Rp=r/n
(12)
【0114】
上記式(12)により決定された設定値Rpをそのまま、PIRとする。
【0115】
[数8]
PIR=1/PII=Rp (13)
【0116】
ステップS53においては、パケット注入レートPIRを更新した後、元のメインルーチンに戻る。また、ステップS54において、受信したRTS信号に応答して、計算されたHPFを含むRTS信号を宛先無線局に向けて中継伝搬させるとともに、上記更新されたHPFテーブル内のHPFの値を新しいPHPFとし、当該新しいPHPFを含むCTS信号を高優先度フローの発信元無線局に向けて逆伝搬させた後、元のメインルーチンに戻る。
【0117】
再び図16を参照すると、ステップS35においては、受信されたRTS信号又はCTS信号の時刻に基づいて、式(5)を用いてPAIを計算してPAIテーブルに格納し、受信した信号内のHPFを、高優先度フローの通信IDに対応してHPFテーブルに格納する。低優先度フローのパケット信号を伝送するノード無線局においては、単に高優先度フローのRTS信号又はCTS信号に含まれているノードID(高優先度フローの通信IDに相当する)とHPFの値を、そのままHPFテーブルに格納して更新する。
【0118】
次いでステップS36において、自局が低優先度フローの発信元無線局であるか否かが判断され、YESのときはステップS37に進む一方、NOのときはステップS38に進む。ステップS37では、自局のPAIテーブルにおけるDMPAIに基づいて式(7)を用いて計算されるPPAIと、上記計算されたPPAIに対応する高優先度のフローのHPFから決定される設定値Rpとに基づいて、低優先度フローのPIRを計算してPIRを更新する。このステップにおいて計算されたPPAIはPAIの最小値であり、このPAIの最小値に相当する高優先度フローのHPFの値から、式(12)を用いて設定値Rpを計算する。計算された設定値Rpに基づいて、式(9)乃至式(11)を用いてPIRを計算して更新する。
【0119】
ステップS37においてPIRを更新した後、元のメインルーチンに戻る。
【0120】
ステップS38では、PHPFのみを含む高優先度のフローのCTS信号を受信したかが判断され、YESのときは、図18のステップS55に進む一方、NOのときはステップS39に進む。ステップS55において、自局のHPFテーブルにおいてHPFがあるか否かが判断され、YESのときはステップS56に進み、NOのときはステップS56Aに進む。ステップS56において、受信されたCTS信号内のHPFと、自局で伝送しているHPFとを平均化して、その平均値を新しいPHPFとして更新し、ステップS57に進む。また、ステップS56Aでは、受信したCTS信号内のHPFを新しいPHPFとして設定してステップS57に進む。
【0121】
ステップS57において、自局が高優先度フローの発信元無線局か否かが判断され、YESのときはステップS58に進み、NOのときはステップS59に進む。ステップS58において、新しいPHPFをHPFとしたときに式(13)を用いて計算される設定値Rpに基づいて式(13)を用いて高優先度フローのPIRを計算してPIRを更新した後で、元のメインルーチンに戻る。ステップS59において、新しいPHPFを含む高優先度のフローのCTS信号を高優先度フローの発信元無線局に向けて逆伝搬させる。なお、ステップS59では、高優先度フローの通信IDの時にCTS信号にPHPFを挿入するか否かを判断して実行する。そして、元のメインルーチンに戻る。
【0122】
さらに、図16のステップS39において、受信したRTS信号に応答して計算されたHPFを含むRTS信号を宛先無線局に向けて中継伝搬させるとともに、自局のPAIテーブルにおいてDMPAIをPPAIとして選択して上記選択されたPPAIと、上記受信されたCTS信号内のPHPFとを含むCTS信号を低優先度フローの発信元無線局に向けて逆伝搬させた後、元のメインルーチンに戻る。
【0123】
ステップS40では、自局のPAIテーブルにおいてDMPAIはあるか否かが判断され、YESのときはステップS41に進む一方、NOのときはそのままステップS42に進む。ステップS41において、受信したCTS信号内のPPAIと、自局のPAIテーブルにおけるDMPAIとを比較してより大きい値を新しいPPAIとして更新し、次いで、ステップS42において、自局が低優先度フローの発信元無線局であるか否かが判断される。ステップS42でYESのときはステップS43に進む一方、NOのときはステップS44に進む。ステップS43では、新しいPPAIと、自局のHPFテーブル内のHPFから式(12)を用いて決定される設定値Rpとに基づいて、式(9)乃至式(11)を用いて低優先度フローのPIRを計算してPIRを更新し、元のメインルーチンに戻る。また、ステップS44では、新しいPPAIと、受信されたCTS信号内のPHPFを含むCTS信号を低優先度フローの発信元無線局に向けて逆伝搬させる。なお、ステップS44において、低優先度フローの通信IDのときにCTS信号にPPAIとPHPFを挿入するか否かを判断して実行することとする。そして、元のメインルーチンに戻る。
【0124】
図19は、図15のサブルーチンであるPAI削除処理(ステップS12)を示すフローチャートである。
【0125】
図19のステップS61において、各高優先度フローについて時間Δtの間RTS信号又はCTS信号を受信していないか否かが判断され、YESのときはステップS62に進む一方、NOのときはそのまま元のルーチンに戻る。ステップS62では、当該高優先度フローに対するPAIをPAIテーブルから削除した後、元のルーチンに戻る。
【0126】
以上説明したように、本実施形態のアドホック無線ネットワーク内の各ノード無線局によって実行されるパケット送受信制御処理によれば、異なる複数の優先度のフローが存在するアドホック無線ネットワークにおいて、各フローの優先度に基づいて当該フローのQoSをサポートすることができる。これにより、高優先度のフローに対する低優先度フローの干渉を最小限にするように低優先度フローを制御し、高優先度のフローのスループットを向上させることができる。
【実施例1】
【0127】
次いで、本実施形態のアドホック無線ネットワークのシミュレーションによる性能評価について説明する。
【0128】
本発明者らは、本発明の実施形態に係る、フローレート制御方式を用いたアドホック無線ネットワークの性能を、クアルネット(QualNet)・ネットワークシミュレータを用いたシミュレーションによって評価した(非特許文献18を参照)。シミュレーションでは、IEEE802.11に基づく指向性のMAC(非特許文献16を参照)を考慮し、また、提案した実施形態に係るプロトコルを、可変ビームアンテナ101を用いた場合についてのみ実装した。シミュレーションは、30度の方位角毎に離散的にステアリングされて360度の範囲をカバーする擬似スイッチング式のビームアンテナの形式である、電子制御導波器アレーアンテナ装置(非特許文献16を参照)を指向性の可変ビームアンテナ101として用いて行った。クォールネット・ネットワークシミュレータには、提案した実施形態に係るプロトコルを実装するために必要な変更を加えた。表1に、シミュレーションに使用したパラメータのセットを示す。
【0129】
【表1】
【0130】
まず、本実施形態に係るフローレート制御方式が実装され、低優先度フローの発信元無線局が低優先度フローコントローラLPCを備えたノード無線局として動作するアドホック無線ネットワークの性能評価について説明する。
【0131】
議論を簡単化するために、1つの列毎に6つのノード無線局を有し、必要な場合は常にそのうちの2つの端部のノード無線局が各々発信元無線局及び宛先無線局として動作する格子状のトポロジーを仮定する。低優先度フローコントローラLPCの性能評価は、次のように設定された3つの格子状トポロジーの下で行った。
【0132】
(A)格子の第1の列に沿った単一の高優先度フローと、格子の第2の列に沿った単一の低優先度フロー:両方のフローのルートは、ルートカップリングを発生させるのに十分なほど物理的に近接している(以下、第1のトポロジーという。)。
(B)格子の第2の列に沿った単一の高優先度フローと、格子の第1及び第3の列に沿った2つの低優先度フロー:3つのルートはすべて、ルートカップリングを発生させるのに十分なほど物理的に近接している(以下、第2のトポロジーという。)。
(C)格子の第2及び第3の列に沿った2つの高優先度フローと、格子の第1の列に沿った単一の低優先度フロー:これらはすべて、ルートカップリングを発生させるのに十分なほど物理的に近接している(以下、第3のトポロジーという。)。
【0133】
本実施形態に係るプロトコルにおいて得られる利得を明確に示すため、静的ルートを使用してルーティングプロトコルによる影響を除去した。また、ルーティングプロトコルに起因するいかなる制御パケットも発生させないために、静的ルートを使用した。発信元無線局及び宛先無線局のペアをランダムに選択する代わりに、高優先度フローと低優先度フローとの間に競合が存在するような発信元無線局及び宛先無線局のペアを選択し、パケット注入間隔の制御の効果を実証できる状況を人工的に創出した。
【0134】
最初のシミュレーション結果として、上述の第1のトポロジー、すなわち、1つの高優先度フローと1つの低優先度フローとが存在する場合の低優先度フローコントローラLPCの性能について説明する。
【0135】
図20乃至図23は、1つの高優先度フローと1つの低優先度フローとが存在する場合の低優先度フローコントローラLPCの性能を示している。高優先度フローのパケット注入間隔(PII)について所望される設定値Rpは20ミリ秒である、すなわち、所望のパケット注入レートは毎秒50パケットである。512バイトのパケットサイズ及び100%のパケット伝送率(PDR)の場合、パケット注入間隔PII=20ミリ秒において期待されるスループットは204.8kbpsである。
【0136】
図20は、低優先度フローコントローラLPCを用いた場合の、高優先度フローのパケット到着間隔(PAI)と低優先度フローのパケット注入間隔(PII)との時間的変化を示すグラフである。図20に示されたシミュレーションでは、高優先度フロー(H)を保護するための低優先度フロー(L)のフローレート適応制御が行われている。図20に示されたシミュレーションでは、高優先度フローのPII(H)及び低優先度フローのPII(L)の両方の初期値は20ミリ秒である。PII(L)=20ミリ秒で動作する低優先度フローがカップリングされている場合には高優先度フローは20ミリ秒のフローレートを保持できないので、低優先度フローのPIIは即時かつ急激に増大して高優先度フローのフローレートを保護する。低優先度フローのフローレートは、漸次減少し、平均してPII(L)=60ミリ秒(近似値)に落ち着く。
【0137】
図21は、本実施形態に係るフローレート制御として適応的なパケット注入レート制御を実行した場合における、対応するスループットとパケット伝送率の結果を示す表である。高優先度フローは、1の値であるパケット伝送率とともにスループット204kbpsを保持することができる。低優先度フローのスループットは53kbpsであり、パケット伝送率は0.999である。このシミュレーション結果を得る際に使用されたパラメータkp,ki及びkdの値はそれぞれ、0.8,0.1,0.1である。
【0138】
図22及び図23は、上記条件下で、本実施形態に係るフローレート制御を実行するコントローラを使用しない場合のシステムの動作を示す。図22及び図23のシミュレーションでは、1つの高優先度フロー(H)及び1つの低優先度フロー(L)が存在する場合に、高優先度フローのパケット注入間隔を20ミリ秒(すなわち毎秒50パケットに固定されたフローレート)に一定に保持し、かつ低優先度フローのパケット注入間隔を手動で増大させ、ここで、図22は、低優先度フローのパケット注入間隔に対する各フローのスループットを示すグラフであり、図23は、低優先度フローのパケット注入間隔に対する各フローのパケット伝送率(PDR)を示すグラフである。
【0139】
高優先度フロー及び低優先度フローの両方がパケット注入間隔PII=20ミリ秒に設定されているとき、高優先度フローのスループットは129kbpsであり、パケット伝送率は0.63であり、一方、低優先度フローのスループットは124kbpsであり、パケット伝送率は0.6である。ここで、低優先度フローのPIIを手動で変化させることによって、高優先度フローのスループット及びパケット伝送率を測定した。低優先度フローのパケット注入間隔PII(すなわちPII(L))を増大させると、高優先度フローのスループット及びパケット伝送率はともに増大する。パケット注入間隔PII(L)=60ミリ秒又はこれ以上のときに、高優先度フローはパケット伝送率0.993でスループットのピーク値204kbpsに達する。よって、パケット注入間隔PII(L)=60ミリ秒が、手動で調整された低優先度フローの最適な設定値であり、この設定値のときに、高優先度フローをその所望のレベルに保持することができる。このことが、低優先度フローのフローレートを制御することによって達成しようとしているものである(図20を参照)。この設定値における低優先度フローのスループットは、67kbpsである。
【0140】
次のシミュレーション結果として、上述の第2のトポロジー、すなわち、1つの高優先度フローと2つの低優先度フローとが存在する場合の低優先度フローコントローラLPCの性能について説明する。
【0141】
図24は、1つの高優先度フローHと2つの低優先度フローL1及びL2とが存在し、すべてが互いにカップリングされる場合において、本実施形態に係るフローレート制御として適応的なパケット注入レート制御を実行したときの、対応するスループットとパケット伝送率を示す表であり、図25は、低優先度フローコントローラLPCの性能として、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。図24及び図25のシミュレーションでは、高優先度フロー(H)のフローレートを保護しかつ低優先度フロー(L1及びL2)自体のスループットを最大化するために、2つの低優先度フローに対する適応的なフローレート制御が行われている。
【0142】
高優先度フローのパケット注入間隔(PII)の所望される設定値Rpは20ミリ秒である、すなわち所望されるパケット注入レートは毎秒50パケットである。図25に、低優先度フローコントローラLPCの動作を示す。図25のシミュレーションでは、パケット注入間隔PII(H)、PII(L1)及びPII(L2)の初期値は20ミリ秒である。低優先度フローコントローラLPCの制御動作を示すため、フローH及びL1の通信は、シミュレーション開始後30秒の時刻に同時に開始させてシミュレーションの終わりまで継続させ、それに対して、フローL2の通信はシミュレーション開始後110秒の時刻に開始させて、シミュレーション開始後180秒の時刻に停止させる。フローL2が存在しなければ、低優先度フローコントローラLPCの動作は先の場合と同じである。しかしながら、フローL2を開始させると、フローL1及びL2の両方のPIIは即時かつ急激に増大してフローHのフローレート(すなわちパケット注入間隔PII)をPII(H)=20ミリ秒に保護する。両方の低優先度フローのフローレートは、漸次減少し、平均してPII(L)=220ミリ秒(近似値)に落ち着く。フローL2が停止されると、図示するようにフローL1のPIIはそのもとの値へと落ち着く。
【0143】
図24を参照すると、高優先度フローは、図20乃至図23に示されたシミュレーション結果と同様に、1の値であるパケット伝送率とともにスループット204.8kbpsを保持することができる。フローL1のスループットは35.15kbpsであり、パケット伝送率は0.99であり、一方、フローL2のスループットは17.5kbpsであり、パケット伝送率は1である。フローL1とL2のスループットの差は、フローL2が存在する場合と存在しない場合とでフローL1が異なるPII(L1)で動作したという事実に起因する。このシミュレーション結果を得るために使用されたパラメータkp,ki及びkdの値はそれぞれ、0.8,0.5,0.2である。本実施形態に係るフローレート制御を実行するコントローラが存在しなければ、フローHのスループットは82.06kbpsであり、パケット伝送率は0.4である。
【0144】
また、次のシミュレーション結果として、上述の第3のトポロジー、すなわち、2つの高優先度フローと1つの低優先度フローとが存在する場合の低優先度フローコントローラLPCの性能について説明する。
【0145】
図26は、2つの高優先度フローH1及びH2と1つの低優先度フローLとが存在し、すべてが互いにカップリングされる場合において、本実施形態に係るフローレート制御として適応的なパケット注入レート制御を実行したときの、対応するスループットとパケット伝送率を示す表であり、図27は、低優先度フローコントローラLPCの性能として、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。図26及び図27のシミュレーションでは、高優先度フローH1及びH2のフローレートを保護しかつ低優先度フローL自体のスループットを最大化するために、低優先度フローLに対する適応的なフローレート制御が行われている。
【0146】
システムは、パケット注入間隔PIIの値を小さくするだけでは余裕のある状態で2つの高優先度フローを保持することができないので、高優先度フローのパケット注入間隔(PII)の所望される設定値Rpは、このシミュレーションでは40ミリ秒に設定される、すなわち所望のパケット注入レートは毎秒25パケットに設定される。この値は、実験で得たものである。このシミュレーションにおける低優先度フローコントローラLPCのタスクは、高優先度フローH1及びH2の両方をこの所望の設定値に保持することである。図27は、低優先度フローコントローラLPCの動作を示す。図27のシミュレーションでは、パケット注入間隔PII(H1)、PII(H2)及びPII(L)の初期値は40ミリ秒である。低優先度フローは、最初の急激な増大の後、平均してパケット注入間隔PII(L)=120ミリ秒(近似値)に落ち着く。図26は、対応するスループットとパケット伝送率を示す。両方の高優先度フローは、ほぼ1の値であるパケット伝送率で所望のスループット102.3kbpsを保持することができる。このシミュレーションにおいて、パケット注入間隔PII(H)は40ミリ秒であるため、パケットサイズが512バイトであってかつ100%のパケット伝送率でる場合の理想スループットは102.4kbpsである。低優先度フローLのスループットは、ほぼ1の値であるパケット伝送率で33.77kbpsである。このシミュレーション結果を得るために使用されたパラメータkp,ki及びkdの値は、0.8,0.8,0.1である。
【0147】
以上説明したシミュレーション結果は、オーバーヘッドのない理想的な環境の格子状トポロジーにおける低優先度フローコントローラLPCの評価であるが、次に、ランダムトポロジーにおけるシステム性能の評価についてのシミュレーション結果を説明する。
【0148】
このシミュレーションでは、本発明者らが開発した指向性MACプロトコルのようなロケーション追跡機構を有する、回転セクタに基づく受信機側に装備する指向性MACプロトコル(非特許文献16を参照)を実装した。また、このシミュレーションでは、本発明者らが開発した指向性ルーティングプロトコルのような、ネットワークを認識するルーティングプロトコル(非特許文献8を参照)を用いた。様々なMAC及びルーティング層制御パケットのオーバーヘッドを伴う実際的なシナリオにおいて本発明の実施形態に係るフローレート制御方式の有効性を示すため、このMAC及びルーティングプロトコル上に本実施形態に係るフローレート制御方式を実装した。1500m×1500mの正方形の有界領域に100個のノード無線局を有するランダムトポロジーにおいて、高優先度フローとしての1つの発信元無線局及び宛先無線局のペアと、低優先度フローとしてのさらに5つの発信元無線局及び宛先無線局のペアとをランダムに選択した。システム性能の評価は、各ノード無線局が静的に配置された場合と、各ノード無線局が移動する場合との両方に関して行った。
【0149】
まず、各ノード無線局が領域内に静的かつランダムに配置された場合のシミュレーション結果について説明する。
【0150】
図28は、フローレート制御方式を実装したノード無線局からなる5つの低優先度フローが存在する場合の高優先度フローの性能を、低優先度フローに低優先度フローコントローラLPCが割り当てられていない場合と、他にまったくフローが存在せず高優先度フローが単独で動作する場合との比較で示したものである。高優先度フローが単独で動作する場合、これはほぼ86kbpsのスループットを生み出す。他の5つの低優先度フローが導入されかつフローレート制御方式(すなわち、低優先度フローコントローラLPCの制御方式)が割り当てられない場合は、図28から明らかであるように、この高優先度フローの性能はその以前の値のほぼ半分にまで劣化する。低優先度フローが存在しても、本実施形態に係るフローレート制御方式を使用するならば、高優先度フローのスループットは単独で動作していたときの値とほぼ同じである。
【0151】
図29は、低優先度フローコントローラLPCをいっさい使用しない場合と使用する場合の2つのシナリオにおける、5つの低優先度フローの性能を示している。本実施形態に係るフローレート制御方式を導入すると、低優先度フローは引き続き、フローレート制御をまったく行わなかった場合のその平均スループットの90%を保持することができる。このことは、低優先度フローのフローレートが高優先度フローのフローレートを保護するために十分なほど低下されなかったからではない。低優先度フローのパケット注入レートが最適に制御されると輻輳は低下し、媒体を適正に利用することがパケットロスを無視できるほど減少させる。この方式は低優先度フローのスループットをも最大化し、パケットは、ネットワークがその時点で処理し得る最適化されたレートで注入される。
【0152】
次に、各ノード無線局が領域内を移動する場合のシミュレーション結果について説明する。連続的に変化しているトポロジーにおいても本発明の実施形態に係るフローレート制御方式が頑健であることを示すために、ノード無線局装置が毎秒0−10メートルで移動しているという条件下で、本実施形態に係るプロトコルを試験しかつ評価した。輻輳情報が低優先度フローの発信元無線局へ高速で逆伝搬され、当該発信元無線局はそのフローレートの制御量を適応的に決定できることから、より優れた性能を達成することが可能である。
【0153】
図30は、本発明の実施形態に係るフローレート制御方式における高優先度フローの性能を、低優先度フローに低優先度フローコントローラLPCが割り当てられていない場合と、他にまったくフローが存在せず高優先度フローが単独で動作する場合との比較で示したものである。単独で動作する高優先度フローは、ほぼ133kbpsのスループットを生み出す。他の5つの低優先度フローが低優先度フローコントローラLPCなしで導入される場合は、図30から明らかであるように、この高優先度フローの性能はその以前の値のほぼ3分の1未満にまで劣化する。低優先度フローが存在しても、本発明の実施形態に係るフローレート制御方式を使用すれば、この高優先度フローのスループットはほぼ127kbpsにまで増加する。
【0154】
図31は、優先度に基づくフローレート制御方式をいっさい使用しない場合(低優先度フローコントローラLPCなし)と、本発明の実施形態に係るフローレート制御としてパケット注入レート制御を導入した後(低優先度フローコントローラLPCを使用)との2つのシナリオにおける低優先度フローの性能を示している。本シミュレーションによる評価において最も興味深い部分は、本実施形態に係るフローレート制御方式を導入すると、低優先度フローはむしろその平均スループットをも向上させ得ることを示している。この向上は、低優先度フローのパケット注入レートの最適な制御によりネットワークの輻輳が減少し、パケットロスを最小限に抑えた最適な媒体利用がもたらされることから可能となる。
【図面の簡単な説明】
【0155】
【図1】本発明に係る一実施形態であるアドホック無線ネットワークを構成する複数のノード無線局1−1乃至1−9の平面配置図である。
【図2】図1の各ノード無線局1の内部構成を示すブロック図である。
【図3】図1のアドホック無線ネットワークにおいて用いられるパケットデータの一般的なフォーマットを示す図である。
【図4】(a)は図1のアドホック無線ネットワークにおいて用いるRTSパケット信号のフォーマットを示す図であり、(b)は図1のアドホック無線ネットワークにおいて用いるCTSパケット信号のフォーマットを示す図である。
【図5】従来技術における問題点を示す図であって、オムニアンテナを用いたとき、低優先度フロー(S2−D2)が高優先度フロー(S1−D1)を妨害する場合を示す平面図である。
【図6】図1のアドホック無線ネットワークに適用される、基本的なフィードバックコントローラを概略的に示すブロック図である。
【図7】図6のフィードバックコントローラを図1のアドホック無線ネットワークに適用した場合の、優先度に基づいたフローレート制御装置を概略的に示すブロック図である。
【図8】本実施形態において、セクターパターンを可変ビームアンテナ101に設定して用いたとき、低優先度フロー(S2−D2)が高優先度フロー(S1−D1)と同時に存在することができることを示す平面図である。
【図9】図2の可変ビームアンテナ101によって形成されるノード無線局1−nの送信ゾーンTZn(α,β,R)を示す図である。
【図10】図2のデータベースメモリ154において格納される方位角及び信号強度レベルテーブル(ASテーブル)の一例を示す表である。
【図11】図2のデータベースメモリ154において格納される高優先度フローテーブル(HPFテーブル)の一例を示す表である。
【図12】図2のデータベースメモリ154において格納されるパケット到着間隔テーブル(PAIテーブル)の一例を示す表である。
【図13】図1のアドホック無線ネットワークにおいて用いられる各ノード無線局での放射パターンの種類と無線通信プロトコルを示すタイミングチャートである。
【図14】図1のアドホック無線ネットワークにおいて用いられるビーコン信号の動作を示すタイミングチャートである。
【図15】図2のノード無線局1の管理制御部105に従って実行されるパケット送受信制御処理を示すフローチャートである。
【図16】図15のサブルーチンであるその他の信号の受信処理(ステップS7)を示すフローチャートの第1の部分である。
【図17】図15のサブルーチンであるその他の信号の受信処理(ステップS7)を示すフローチャートの第2の部分である。
【図18】図15のサブルーチンであるその他の信号の受信処理(ステップS7)を示すフローチャートの第3の部分である。
【図19】図15のサブルーチンであるPAI削除処理(ステップS12)を示すフローチャートである。
【図20】本実施形態のシミュレーション結果であって、高優先度フローと低優先度フローとが存在するときの、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。
【図21】本実施形態のシミュレーション結果であって、高優先度フローと低優先度フローとが存在するときの、適応的パケット注入レート制御の結果を示す表である。
【図22】本実施形態のシミュレーション結果であって、高優先度フローと低優先度フローとが存在するときの、低優先度フローのパケット注入間隔に対する各フローのスループットを示すグラフである。
【図23】本実施形態のシミュレーション結果であって、高優先度フローと低優先度フローとが存在するときの、低優先度フローのパケット注入間隔に対する各フローのパケット伝送率を示すグラフである。
【図24】本実施形態のシミュレーション結果であって、1つの高優先度フローと2つの低優先度フローとが存在するときの、適応的パケット注入レート制御の結果を示す表である。
【図25】本実施形態のシミュレーション結果であって、1つの高優先度フローと2つの低優先度フローとが存在するときの、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。
【図26】本実施形態のシミュレーション結果であって、2つの高優先度フローと1つの低優先度フローとが存在するときの、適応的パケット注入レート制御の結果を示す表である。
【図27】本実施形態のシミュレーション結果であって、2つの高優先度フローと1つの低優先度フローとが存在するときの、高優先度フローのパケット到着間隔と低優先度フローのパケット注入間隔との時間的変化を示すグラフである。
【図28】本実施形態のシミュレーション結果であって、複数のノード無線局が領域内に静的かつランダムに配置された場合、高優先度フローのみのとき、高優先度フロー及び5つの低優先度フロー(フローレート制御なし)のとき、並びに、高優先度フロー及び5つの低優先度フロー(フローレート制御有り)のときにおける高優先度フローのスループットの比較を示すグラフである。
【図29】本実施形態のシミュレーション結果であって、複数のノード無線局が領域内に静的かつランダムに配置された場合、低優先度フローについて、フローレート制御の有無に対する平均スループットを示すグラフである。
【図30】本実施形態のシミュレーション結果であって、複数のノード無線局が領域内を移動する場合、高優先度フローのみのとき、高優先度フロー及び5つの低優先度フロー(フローレート制御なし)のとき、並びに、高優先度フロー及び5つの低優先度フロー(フローレート制御有り)のときにおける高優先度フローのスループットの比較を示すグラフである。
【図31】本実施形態のシミュレーション結果であって、複数のノード無線局が領域内を移動する場合、低優先度フローについて、フローレート制御の有無に対する平均スループットを示すグラフである。
【符号の説明】
【0156】
1,1−1乃至1−9…ノード無線局、
10,20…減算器、
11…コントローラ、
12…プラント、
21…フローコントローラ、
22…ネットワークにおけるフローシステム、
23…フローレートを逆伝搬させるシステム、
101…可変ビームアンテナ、
102…サーキュレータ、
103…放射パターン制御部、
104…パケット送受信部、
105…トラヒックモニタ部、
106…回線制御部、
107…上位レイヤ処理装置、
130…パケット受信部、
131…高周波受信機、
132…復調器、
133…受信バッファメモリ、
140…パケット送信部、
141…送信タイミング制御部、
142…送信バッファメモリ、
143…変調器、
144…高周波送信機、
151…管理制御部、
152…検索エンジン、
153…更新エンジン、
154…データベースメモリ、
160…拡散符号発生器。
【特許請求の範囲】
【請求項1】
複数の無線局を備え、各無線局間で異なる優先度を有する複数のパケットフローを用いて発信元無線局から宛先無線局に対してパケット信号を伝送することによりパケット無線通信を行う無線ネットワークのための制御装置において、
各無線局は、発信元無線局から宛先無線局への低優先度フローである同一の各パケットフローについて、上記各パケットフローのパケット信号を受信したとき、当該パケットフローのパケット到着間隔(PAI)を計算してPAIテーブルとして記憶装置に記憶するとともに、所定の期間内に受信された自局で伝送しない他の高優先度のフローの数(HPF)を計数してHPFテーブルとして上記記憶装置に記憶し、
低優先度フローの無線信号を受信したパケットフローの発信元無線局以外の中継無線局は、上記PAIテーブルにおける当該パケットフローの最大のパケット到着間隔(PPAI)と、上記受信したパケットフローのパケット信号に含まれるパケットフローの最大のパケット到着間隔(PPAI)の少なくとも大きい値を有するパケット到着間隔(PPAI)及び上記他の高優先度のフローの数(HPF)を含むパケット信号を発信元無線局に向けて逆伝搬させて送信し、
高優先度フローの無線信号を受信したパケットフローの発信元無線局以外の中継無線局は、上記他の高優先度のフローの数(HPF)を含むパケット信号を発信元無線局に向けて逆伝搬させて送信し、
低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)と、上記HPFテーブル内の他の高優先度のフローの数(HPF)とに基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする無線ネットワークのための制御装置。
【請求項2】
低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)及び上記HPFテーブル内の他の高優先度のフローの数(HPF)から決定される設定値Rpとの誤差に基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする請求項1記載の無線ネットワークのための制御装置。
【請求項3】
低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)及び上記HPFテーブル内の他の高優先度のフローの数(HPF)から決定される設定値Rpとの誤差に基づいて、当該誤差が最小となるように、比例積分及び微分制御(PID制御)方法を用いて、新しいパケット注入レート(PII)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする請求項1記載の無線ネットワークのための制御装置。
【請求項4】
高優先度のフローの発信元無線局は、上記HPFテーブル内の他の高優先度のフローの数(HPF)に基づいて、当該高優先度フローのパケット注入レート(PIR)を決定し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする請求項1乃至3のうちのいずれか1つに記載の無線ネットワークのための制御装置。
【請求項1】
複数の無線局を備え、各無線局間で異なる優先度を有する複数のパケットフローを用いて発信元無線局から宛先無線局に対してパケット信号を伝送することによりパケット無線通信を行う無線ネットワークのための制御装置において、
各無線局は、発信元無線局から宛先無線局への低優先度フローである同一の各パケットフローについて、上記各パケットフローのパケット信号を受信したとき、当該パケットフローのパケット到着間隔(PAI)を計算してPAIテーブルとして記憶装置に記憶するとともに、所定の期間内に受信された自局で伝送しない他の高優先度のフローの数(HPF)を計数してHPFテーブルとして上記記憶装置に記憶し、
低優先度フローの無線信号を受信したパケットフローの発信元無線局以外の中継無線局は、上記PAIテーブルにおける当該パケットフローの最大のパケット到着間隔(PPAI)と、上記受信したパケットフローのパケット信号に含まれるパケットフローの最大のパケット到着間隔(PPAI)の少なくとも大きい値を有するパケット到着間隔(PPAI)及び上記他の高優先度のフローの数(HPF)を含むパケット信号を発信元無線局に向けて逆伝搬させて送信し、
高優先度フローの無線信号を受信したパケットフローの発信元無線局以外の中継無線局は、上記他の高優先度のフローの数(HPF)を含むパケット信号を発信元無線局に向けて逆伝搬させて送信し、
低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)と、上記HPFテーブル内の他の高優先度のフローの数(HPF)とに基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする無線ネットワークのための制御装置。
【請求項2】
低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)及び上記HPFテーブル内の他の高優先度のフローの数(HPF)から決定される設定値Rpとの誤差に基づいて、当該低優先度フローのパケット注入レート(PIR)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする請求項1記載の無線ネットワークのための制御装置。
【請求項3】
低優先度フローの発信元無線局は、当該低優先度フローに現在設定されているパケット注入レート(PII)と、すべてのパケットフローにおいて最大値を有するパケット到着間隔(PPAI)及び上記HPFテーブル内の他の高優先度のフローの数(HPF)から決定される設定値Rpとの誤差に基づいて、当該誤差が最小となるように、比例積分及び微分制御(PID制御)方法を用いて、新しいパケット注入レート(PII)を計算し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする請求項1記載の無線ネットワークのための制御装置。
【請求項4】
高優先度のフローの発信元無線局は、上記HPFテーブル内の他の高優先度のフローの数(HPF)に基づいて、当該高優先度フローのパケット注入レート(PIR)を決定し、当該計算されたパケット注入レート(PIR)で当該パケットフローのパケット信号を送信することを特徴とする請求項1乃至3のうちのいずれか1つに記載の無線ネットワークのための制御装置。
【図1】

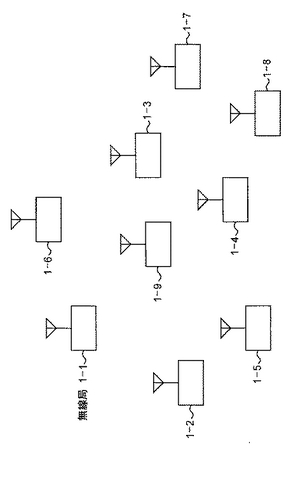
【図2】

【図3】
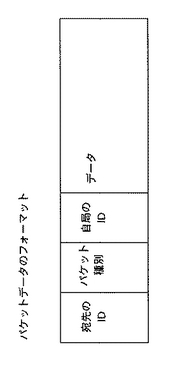
【図4】
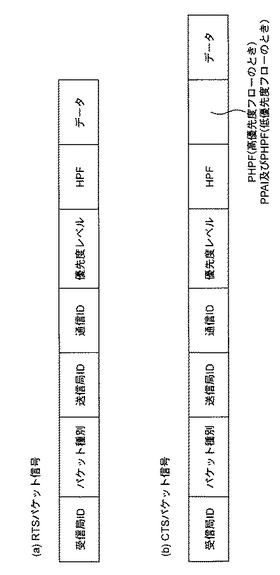
【図5】
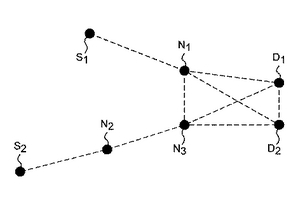
【図6】
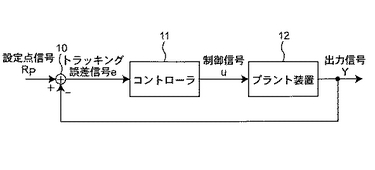
【図7】
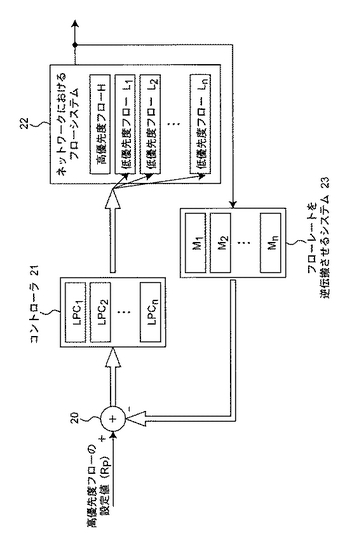
【図8】
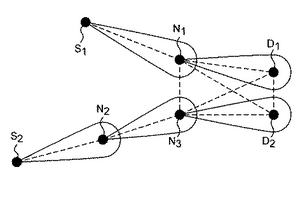
【図9】
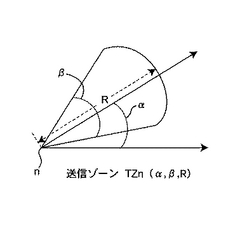
【図10】
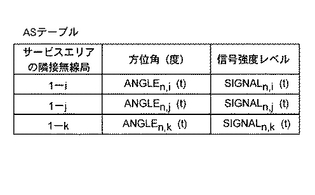
【図11】
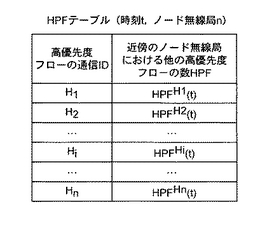
【図12】
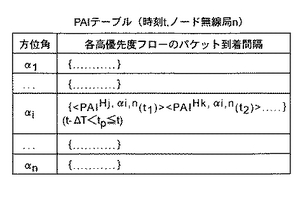
【図13】
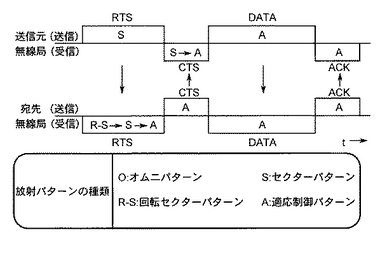
【図14】
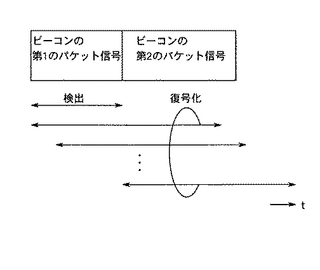
【図15】
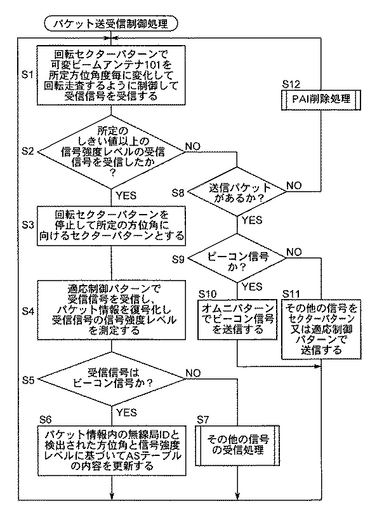
【図16】
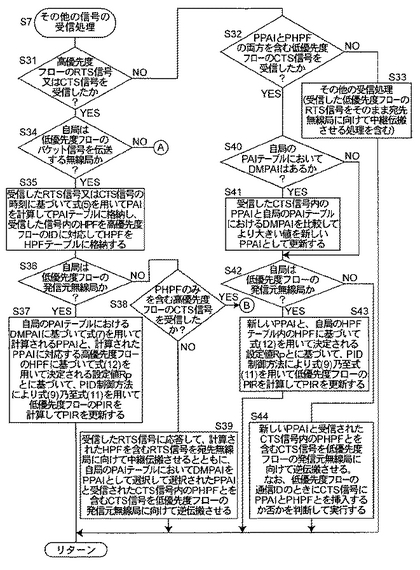
【図17】
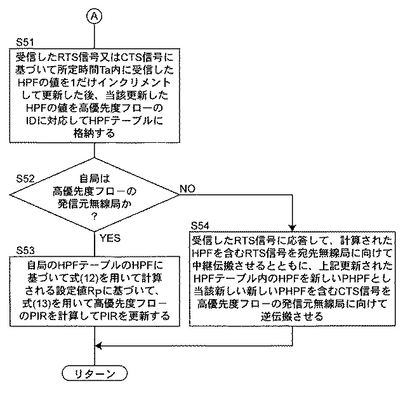
【図18】
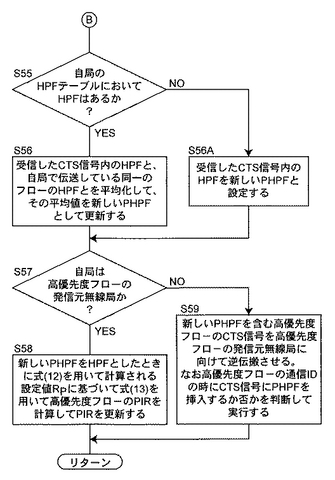
【図19】
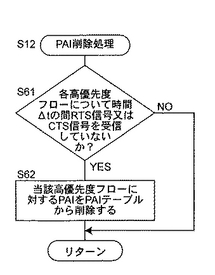
【図20】
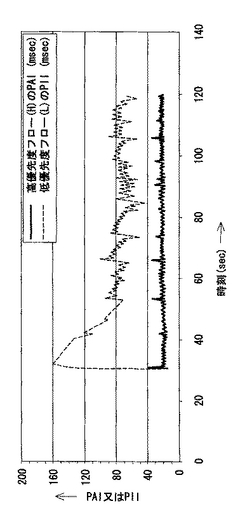
【図21】
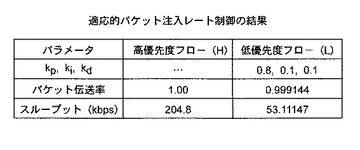
【図22】
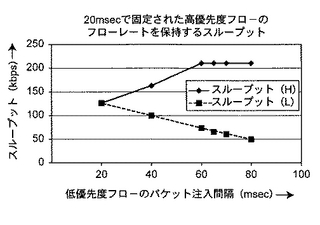
【図23】
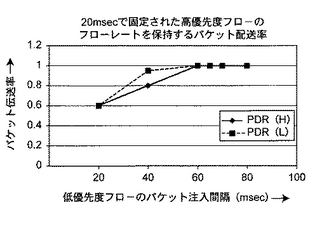
【図24】
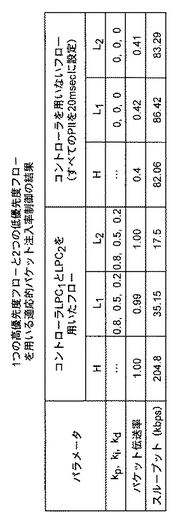
【図25】
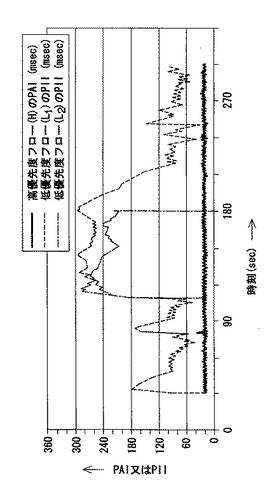
【図26】
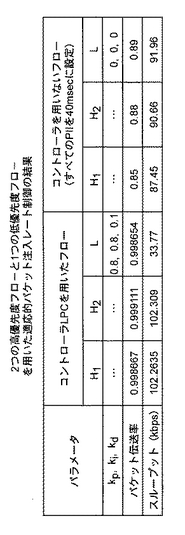
【図27】
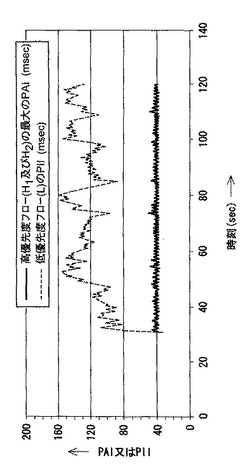
【図28】
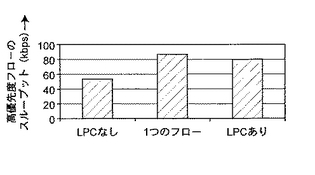
【図29】
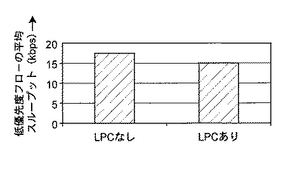
【図30】
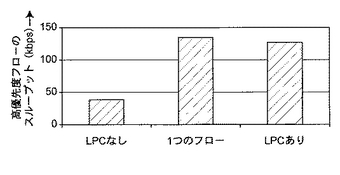
【図31】
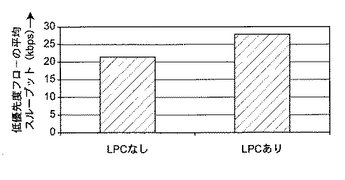
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【図26】
【図27】
【図28】
【図29】
【図30】
【図31】
【公開番号】特開2006−5749(P2006−5749A)
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願番号】特願2004−181295(P2004−181295)
【出願日】平成16年6月18日(2004.6.18)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成16年度独立行政法人情報通信研究機構、研究テーマ「自律分散型無線ネットワークの研究開発」に関する委託研究、産業活力再生特別措置法第30条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
【公開日】平成18年1月5日(2006.1.5)
【国際特許分類】
【出願日】平成16年6月18日(2004.6.18)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成16年度独立行政法人情報通信研究機構、研究テーマ「自律分散型無線ネットワークの研究開発」に関する委託研究、産業活力再生特別措置法第30条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
[ Back to top ]