
無線伝送システムとその移動局
【課題】 回路構成や通信方式の複雑化を招来することなく、高品質なデータ伝送が可能な密結合無線伝送方式による無線伝送システムを提供する。
【解決手段】 固定局5に接続されている対撚りケーブル4を介して、映像を含むデータ信号f3を固定局5に対して無線で送信するデータ伝送用の結合器24,25を複数備えている無線伝送システムの移動局3であって、前記複数の結合器24,25を、対撚りケーブル4から受信した受信信号f1のレベル変動の位相が互いに異なるように配置し、データ信号f3の送信元を複数の結合器24,25のうちで受信信号f3のレベルが最も大きい結合器24,25に切り替える切り替え手段26を設ける。
【解決手段】 固定局5に接続されている対撚りケーブル4を介して、映像を含むデータ信号f3を固定局5に対して無線で送信するデータ伝送用の結合器24,25を複数備えている無線伝送システムの移動局3であって、前記複数の結合器24,25を、対撚りケーブル4から受信した受信信号f1のレベル変動の位相が互いに異なるように配置し、データ信号f3の送信元を複数の結合器24,25のうちで受信信号f3のレベルが最も大きい結合器24,25に切り替える切り替え手段26を設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、遠隔操作による点検装置として利用するのに好適な無線伝送システムとその移動局に関し、特に、密結合無線伝送方式で信号伝送を行う無線伝送システムとその移動局に関するものである。
【背景技術】
【0002】
従来から、高速道路や橋梁の床版、トンネルの上半部分といった高所で危険を伴う被検査箇所の点検を行うために、遠隔操作で自動走行する点検ロボットを有する点検装置が既に開発されている。かかる点検装置では、固定局であるコントローラとカメラを有する移動局である点検ロボットの間の信号伝送として、ケーブルが不要で小型化が可能な無線伝送方式を用いるのが一般的である(特許文献1参照)。
【0003】
このようなケーブル無しの無線伝送方式の場合には、送信出力が小さく電波使用の免許が不要な特定小電力無線を採用すればよいが、法令で電界強度が制限されているため、伝送可能距離が限られるという欠点がある。そこで、本出願人は、そのような欠点のない密結合無線伝送方式を採用した点検装置を既に開発している(特許文献2参照)。
【0004】
この点検装置では、移動局である点検ロボットの走行方向に沿ってケーブルが敷設され、そのケーブルを固定局であるコントローラと接続することによって構成されており、点検ロボットに設けられた結合器をケーブルに密着又は近接させて無線信号の送受信を行うことにより、ケーブルを介して固定局と移動局の間で、移動局のカメラで撮影した映像信号を無線で送受信するものである。このような密結合無線伝送方式を採用することにより、法令で定められた電界強度を遵守しながら、伝送可能距離を延長することができる。
【0005】
かかる密結合無線伝送方式によって固定局と移動局の間で映像信号を伝送するに当たって、対撚りケーブルを利用した誘導無線方式で映像をアナログ伝送することもあるが、この場合には安定した高画質の映像信号の伝送が困難であり、伝送路の状況によって映像品質が著しく変動するという問題がある。
特に、最近の画像処理技術の進歩に伴い、撮影した映像をデジタル画像処理することによって迅速かつ精度のよい点検が可能となるが、その実現のためには固定局であるコントローラに高品質な映像信号を伝送する必要がある。
【0006】
このため、特許文献2に記載の点検ロボット装置では、映像品質を向上するためにQPSK方式等の多値化したデジタル変調方式を採用し、ケーブルを通じてその変調された映像信号をデジタル伝送するようにしている。
【特許文献1】特開平8−128015号公報
【特許文献2】特開2006−42020号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、デジタル変調方式で大容量の映像信号を伝送するには、広い周波数帯域を必要とすることから、映像信号は高い搬送波周波数を有する無線信号に変調されて伝送される。しかし、高周波数領域では、ケーブル内の伝送路が分布定数回路となるため、移動局である点検ロボットとケーブルとの位置関係によって信号の伝送特性が大きく変動する。
【0008】
そのため、点検ロボットが撮影を行いながらレール上を移動すると、ケーブルに対する相対位置の変化によって信号の伝送特性に変動が生じ、このため、コントローラで受信する無線信号のレベルにも変動が生じる。
そこで、前記特許文献2に記載の点検装置では、デジタル画像の安定化のために複数の送信周波数を設定し、受信側のコントローラにおいて受信状態のよい周波数を選択して映像信号を伝送するようにしている。
【0009】
しかし、このような伝送方式では、映像信号の送信側の点検ロボットだけでなく、受信側のコントローラについても複数の周波数帯域での受信を可能とする必要があるので、固定局の回路構成が複雑になる。また、この場合には、点検ロボットとコントローラの間で周波数切り替えのための制御通信を行う必要があるので、両者間の通信方式が複雑になるという欠点もある。
【0010】
一方、後述の実施形態でも述べる通り、伝送媒体が対撚りケーブルの場合には、そのケーブルを構成する二本の電線の向きにより結合器の伝送特性が大きく変化する。このため、点検ロボットが撮影を行いながらレール上を移動すると、結合器の伝送特性は、ケーブルの分布定数回路に基づく変化よりも小さいピッチで変化するが、特許文献2に記載の点検装置では、このようなケーブルの撚り構造に伴う伝送特性の変化に対する対策については、何ら考慮されていない。
【0011】
本発明は、このような実情に鑑み、回路構成や通信方式の複雑化を招来することなく、高品質なデータ伝送が可能な密結合無線伝送方式による無線伝送システムを提供することを目的とする。
また、本発明は、対撚りケーブルを採用する場合であっても、高品質なデータ伝送が可能な密結合無線伝送方式による無線伝送システムを提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、固定局に接続されている対撚りケーブルを介して、映像を含むデータ信号を前記固定局に対して無線で送信するデータ伝送用の結合器を複数備えている無線伝送システムの移動局であって、前記複数の結合器は、前記対撚りケーブルから受信した受信信号のレベル変動の位相が互いに異なるように配置されており、前記データ信号の送信元を前記複数の結合器のうちで前記受信信号のレベルが最も大きい結合器に切り替える切り替え手段を備えていることを特徴とする。
【0013】
上記した本発明の移動局によれば、データ伝送用の複数の結合器が、対撚りケーブルから受信した受信信号のレベル変動の位相が互いに異なるように配置されており、これらの結合器のうちで前記受信信号のレベルが最も大きい結合器にデータ信号の送信元を切り替え手段によって切り替えるようにしたので、選択された結合器から対撚りケーブルに送信されるデータ信号の劣化が最小限に抑えられ、移動局からのデータ信号を劣化させずに固定局に伝送することができる。
【0014】
また、本発明の移動局によれば、移動局に設けた複数のデータ伝送用の結合器のうちの伝送特性がよい方の結合器によってデータ信号を固定局に送信するようにしたので、従来のように複数の周波数帯域を受信するための回路構成を固定局において採用する必要がなく、しかも、移動局と固定局の間で周波数切り替えのための制御通信を行う必要もない。このため、システム全体の回路構成及び通信方式が簡便になる。
なお、本発明において、移動局側の複数の結合器が対撚りケーブルから受信する受信信号としては、具体的には、固定局から対撚りケーブルを介して送信される、当該移動局を遠隔操作するための制御信号を利用することができる。
【0015】
本発明において、前記切り替え手段を固定局に設けてもよいが、この場合には、移動局側の各結合器が受信した受信信号のレベル比較と結合器の切り替え制御を、固定局側において行うことになるが、そのような制御を移動局と固定局との間で正確に同期をとって行うことは困難である。このため、固定局から結合器の切り替えを行うための制御信号がデータ信号と干渉し、固定局に対するデータ信号の伝送が阻害され得るという不都合が生じる。
【0016】
そこで、前記切り替え手段は、データ伝送用の各結合器とともに移動局側に搭載することが推奨される。
この場合には、各結合器が受信した受信信号のレベル比較と結合器の切り替え制御を移動局において行うことになるので、例えば、データ信号のガードビットにおいて切り替え手段を作動させるタイミング調整手段を更に移動局に設けることにより、データ信号の送信と干渉しないように結合器の切り替えタイミングを調整でき、固定局に対するデータ信号の伝送を適切に行うことができる。
【0017】
本発明において、データ伝送用の各結合器間の距離は、各結合器における制御信号の変動の位相が揃わないものであれば、特定の距離に限定されるものではないが、それらの複数の結合器は、前記受信信号のレベル変動の位相が互いに反転する位置に配置することが好ましい。このような結合器の配置は、より具体的には、移動局の移動方向であるケーブル長さ方向において、対撚りケーブルの撚りピッチの1/4の奇数倍だけ離れた位置に配置することによって実現することができる。
この場合には、一方の結合器での伝送損失が最大であるときに、他方の結合器での伝送損失が最小となるので、切り替え手段によってこれらの結合器のいずれか一方を選択的に採用した場合における、対撚りケーブルに対するデータ信号の伝送損失を最小限に抑制することができる。
【0018】
また、本発明において、データ伝送用の複数の結合器にそれぞれデュプレクサを接続することにより、各結合器が受信する微弱な受信信号(後述の実施形態における制御信号)が、各結合器から送信されるデータ信号から受ける影響を極力小さくすることができ、これにより、結合器の切り替え制御をより確実に行うことができる。
更に、本発明において、複数の結合器として、発信電波の方向性を対撚りケーブルと固定局との接続側に向けることができる方向性結合器を採用すれば、対撚りケーブル内での電波の干渉が抑制され、対撚りケーブルに対する方向性が一定である通常の結合器に比べて、移動局からのデータ信号をより確実に固定局に伝送することができる。
【発明の効果】
【0019】
以上説明した通り、本発明によれば、回路構成や通信方式の複雑化を招来することなく、移動局からのデータ信号を劣化させずに固定局に伝送できるので、高品質なデータ伝送が可能な密結合無線伝送方式による無線伝送システムを安価に提供することができる。
【発明を実施するための最良の形態】
【0020】
以下、図面に基づいて、本発明の実施形態を説明する。
〔点検装置の全体構成〕
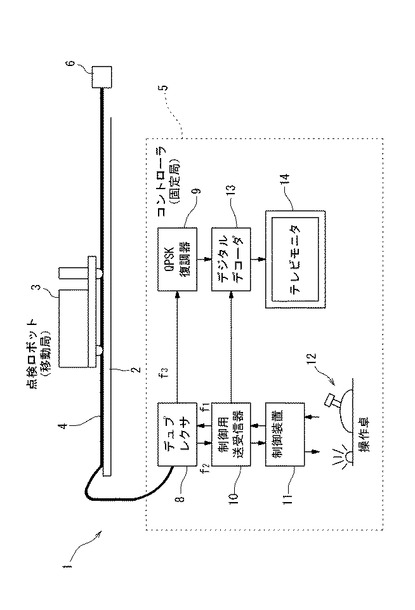
図1は、本発明の無線伝送システムを採用した点検装置の概略構成図である。
本実施形態の点検装置1は、高速道路や橋梁の床版等の高所にある被検査箇所の点検を遠隔操作で行うためのものであり、図1に示すように、橋梁等の構造物の下方に敷設された走行レール2に走行自在に設けられた移動局としての点検ロボット3と、走行レール2に沿って敷設された対撚りケーブル4と、このケーブル4の一端に接続された固定局としてのコントローラ5とから構成されている。
【0021】
対撚りケーブル4の他端には、終端器6が接続されている。また、図1に示す例では、コントローラ5に対撚りケーブル4が直結されているが、コントローラ5とケーブル4とは図示しない整合器を介して間接的に接続するようにしてもよい。
図1及び図2を参照して点検装置1の全体構成と動作を説明すると、まず、点検ロボット3は、走行レール2を走行しながらテレビカメラ27で点検対象物を撮影するとともに、集音マイク28で点検対象物周辺の音声を取得する。
【0022】
その映像と音声の信号(以下、データ信号f3という。)は、データ信号用の結合器24,25から対撚りケーブル4に送信され、このケーブル4を介してコントローラ5に伝送される。
点検ロボット3は、現在位置、走行速度、テレビカメラ方向及びバッテリー残量などの運転状態の信号(以下、状態信号f2という。)を、前記結合器24,25とは別に設けられた制御用の結合器19及び対撚りケーブル4を介してコントローラ5へ送信する。
【0023】
コントローラ5は、ケーブル4を介して点検ロボット3からデータ信号f3と状態信号f2を受信し、テレビモニタ14に映像を表示しかつ音声を出力する。更に、コントローラ5は、点検ロボット3の運転状態をテレビモニタ14に表示する。
点検を行うユーザは、コントローラ5に表示される点検ロボット3の運転状態を確認しながら、テレビモニタ14上に表示される映像と音声出力を参照して点検作業を行うことができる。更に、ユーザは、コントローラ5の操作装置12を用いて、点検ロボット3の前進及び後退や停止等の操作や、テレビカメラ27の上下左右方向の旋回の操作を行うことができる。
【0024】
コントローラ5は、上記したユーザの操作を受けて、点検ロボット3に対して操作を指示する信号(以下、制御信号f1という。)を生成し、その制御信号f1を対撚りケーブル4を介して点検ロボット3へ送信する。
点検ロボット3は、制御用の結合器19を介してコントローラ5からの上記制御信号f1を受信し、ユーザの操作指示に応じて各部位を動作するようになっている。
【0025】
対撚りケーブル4は、密結合無線伝送方式に適したケーブルであり、二本の電線をほぼ一定のピッチで撚り合わせて対にしたツイストペアケーブルよりなる。このケーブル4には、シールドの無いものが使用されている。また、対撚りケーブル4は、走行レール2に沿って敷設されており、対撚りケーブル4の両端にはコントローラ5と終端器6がそれぞれ接続されている。この終端器6は対撚りケーブル4の終端部での反射波の発生を抑制するものである。
なお、対撚りケーブル4は、無線信号を増幅させる中継器(図示しない)を介して他の対撚りケーブル4と接続することにより、伝送距離を延長させることもできる。
【0026】
〔コントローラの構成〕
図1に示すように、前記コントローラ5は、対撚りケーブル4に接続されたデュプレクサ8と、このデュプレクサ8にそれぞれ接続されたQPSK(Quadruple Phase Shift Keying:4相位相変調)方式による復調器9と、制御用送受信器10とを備えている。
制御用送受信器10は、例えばFSK(Frequency Shift Keying:周波数偏移変調)方式等によって点検ロボット3の遠隔操作を行うための制御信号f1を途切れなく送信することができ、この制御信号f1に対応する状態信号f2を受信することができる。
【0027】
制御用送受信器10には制御装置11が接続され、この制御装置11には操作装置12が接続されている。制御装置11は、送受信器10から入力された状態信号f2の復調信号に基づいて、操作装置12に設けてある表示部に対して、前進又は後進等の運動表示を切り替える。
また、制御装置11は、操作装置12に設けてある操作レバーからの操作信号を送受信器10に出力する。送受信器10は、その操作信号を例えばFSK変調方式で制御信号f1に変調して、その制御信号f1をデュプレクサ8を介して対撚りケーブル4に送信する。
【0028】
QPSK復調器9は、点検ロボット3からのQPSK変調波よりなるデータ信号f3をMPEG信号に復調し、この信号をデジタルデコーダ13に出力する。このデコーダ13は、復調器9から受けたMPEG信号をアナログの映像信号及び音声信号に変換し、テレビモニタ14よりなる表示装置に出力する。テレビモニタ14は、デジタルデコーダ13からの映像信号及び音声信号に基づいて、所定の映像表示及び音声出力を行う。
【0029】
〔点検ロボットの構成〕
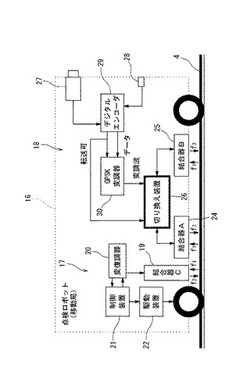
図2は、本実施形態の点検ロボット3の概略構成図である。
図2に示すように、この点検ロボット3は、対撚りケーブル4に沿って移動自在な走行機体16と、この走行機体16に搭載された駆動制御部17及びデータ伝送部18とを備えている
このうち、駆動制御部17は、ケーブル4に密着又は近接した状態で配置された制御用の結合部19と、制御信号用の変復調器20と、制御装置21と、駆動装置22とを備えている。
【0030】
制御用の結合器19は、ループアンテナを内部に有しており、対撚りケーブル4に状態信号f2を送信し、同ケーブル4からの制御信号f1を受信する。
制御信号用の変復調器20は、結合器19から受けた制御信号f1を例えばFSK変調方式で復調し、その復調信号を制御装置21に出力する。制御装置21は、その復調信号に基づいて駆動装置22を制御する。
この駆動装置22は、走行機体16の駆動モータ及びテレビカメラ27の旋回モータ等よりなり、制御装置21の指令に基づいて、走行機体16を前進又は後進ないし停止させ、或いは、テレビカメラ27に上下左右方向の旋回運動を行わせる。
【0031】
また、制御装置21は、駆動装置22の運動状態(上記駆動モータや旋回モータの回転方向や作動状態等)を常時把握しており、その状態を示すアナログ信号を制御信号用の変復調器20に出力している。そして、この変復調器20は、制御装置21からの制御信号を例えばFSK変調方式で状態信号f2に変調し、この状態信号f2は、前記結合器19を介して対撚りケーブル4に送信される。
【0032】
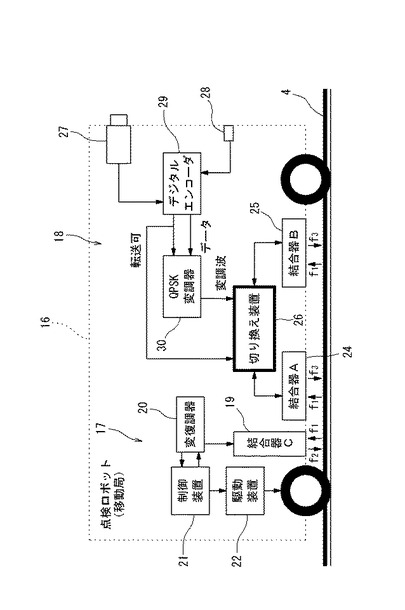
前記データ伝送部18は、点検ロボット3の移動方向であるケーブル長さ方向に離れた二つの位置にそれぞれ配置された特性が揃った一対のデータ伝送用の結合器24,25と、この両結合器24,25が接続された切り替え装置26と、点検対象物を撮影するためのテレビカメラ27と、点検対象物の周辺の音声を拾う集音マイク28と、そのカメラ27及びマイク28に接続されたデジタルエンコーダ29と、このエンコーダ29に接続されたQPSK変調器30とから構成されている。
【0033】
テレビカメラ27は、カメラレンズを通して撮影した点検対象物の映像を電気的な信号に変換して、デジタルエンコーダ29に出力し、集音マイク28は、取得した音声を電気的な信号に変換して、同エンコーダ29に出力する。
デジタルエンコーダ29は、テレビカメラ27からの映像信号と集音マイク28からの音声信号を、映像音声のデジタル信号であるMPEG信号に変換し、この信号をQPSK変調器30に出力する。
【0034】
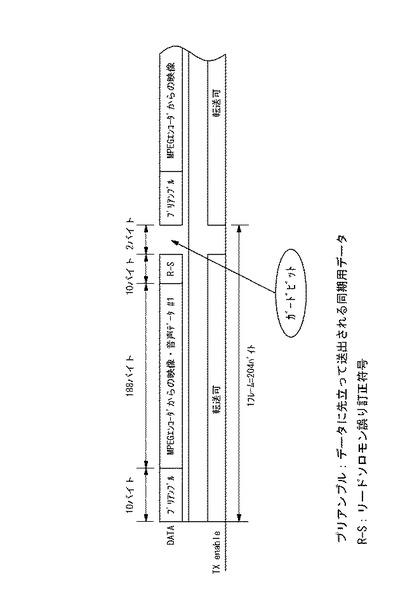
本実施形態のデジタルエンコーダ29は、映像及び音声信号に対して同期用のプリアンブルやリードソロモン誤り訂正符号を付加するとともに、所定のガードビットを付加して例えば図4に示すフレームを作成する符号変換機能を有し、この各フレームをQPSK変調器30に出力する。
QPSK変調器30は、MPEG信号よりなるデータ信号f3のフレームをQPSK方式によってQPSK変調波に変調し、この変調波を前記切り替え装置26に出力する。切り替え装置26は二つの結合器24,25のうちのいずれか一方を選択し、この選択された結合器24,25がQPSK変調波よりなるデータ信号f3を対撚りケーブル4に送信する。
【0035】
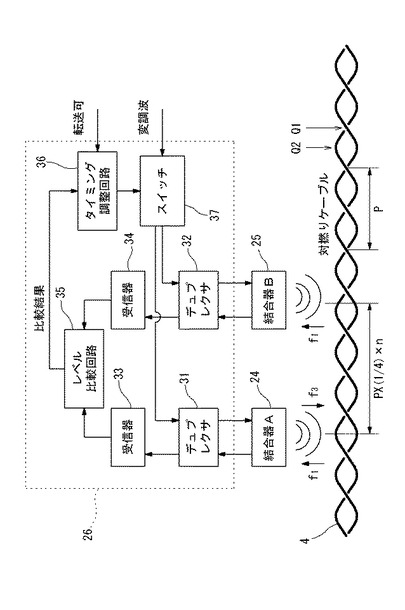
図3は、切り替え装置26の回路構成を示すブロック図である。
図3に示すように、データ伝送用の各結合器24,25は、ループアンテナを内部に有しており、対撚りケーブル4にQPSK変調波よりなるデータ信号f3を送信し、同ケーブル4からの制御信号f1を受信するものである。
本実施形態の切り替え装置(切り替え手段)26は、データ伝送用の各結合器24,25に接続された一対のデュプレクサ31,32と、これらのデュプレクサ31,32にそれぞれ接続された一対の受信器33,34と、この各受信器33,34が接続されたレベル比較器35と、データ信号f3の送信タイミングを調整するタイミング調整回路36と、この調整回路36の指示に従って結合器24,25を切り替えるスイッチ37とを備えている。
【0036】
各デュプレクサ31,32は、結合器24,25のアンテナ端子と送信側であるスイッチ37の端子の間に接続された送信フィルタと、同アンテナ端子と受信端子との間に接続された分波回路及び受信フィルタによって構成されている。また、各デュプレクサ31,32に含まれる分波回路は、送受信信号(この場合は、データ信号f3と制御信号f1)が互いに相手方の回路に与える影響を遮断する。
【0037】
このため、送信側端子からの送信信号であるデータ信号f3が受信側端子に達することなく、結合器24,25のアンテナ端子に送出され、かつ、アンテナ端子より供給される受信信号である制御信号f1が送信側端子に達することなく受信側端子へと供給されるようになっており、これにより、各結合器24,25が受信する微弱な制御信号f1が、各結合器24,25から送信するデータ信号f3から受ける影響が小さくなり、結合器24,25の切り替え制御をより確実に行うことができる。
【0038】
各受信器33,34はレベル比較回路35に常に制御信号f1を出力しており、レベル比較回路35は、いずれの結合器24,25からの制御信号f1が大きいか否かを判定し、その結果をタイミング調整回路36に出力する。
タイミング調整回路36は、レベル比較回路35からの判定結果に基づいて、制御信号f1が大きい方の結合器24,25にQPSK変調器30からのデータ信号f3が送られるよう、スイッチ37を切り替える。
【0039】
また、タイミング調整回路36は、デジタルエンコーダ29から転送されたMPEG信号に基づいて、データ信号f3に含まれているガードビットのタイミングを認識し、この間隔においてスイッチ37に切り替え動作させるようになっている。
ところで、対撚りケーブル4は、二本の電線をほぼ一定のピッチで撚り合わせて対にした構造になっているので、二本の電線が水平に並ぶ位置Q1では、結合器24,25の伝送レベルが最大(伝送損失が最小)となり、逆に、二本の電線が垂直に並ぶ位置Q2では、結合器24,25の伝送レベルが最小(伝送損失が最大)となる。
【0040】
このため、対撚りケーブル4の撚りピッチをPとすると、データ伝送用の各結合器24,25における伝送損失は、ほぼ半ピッチ(0.5×P)の周期で最大と最小を繰り返して変動するものとなる。そこで、本実施形態では、対撚りケーブル4の撚りピッチPに対して、両結合器24,25がP×(1/4)×n(ただしnは奇数)だけ離れた状態となるように、走行機体16に両結合器24,25を設置し、これにより、各結合器24,25での制御信号f1の変動の位相が反転するようにした。
【0041】
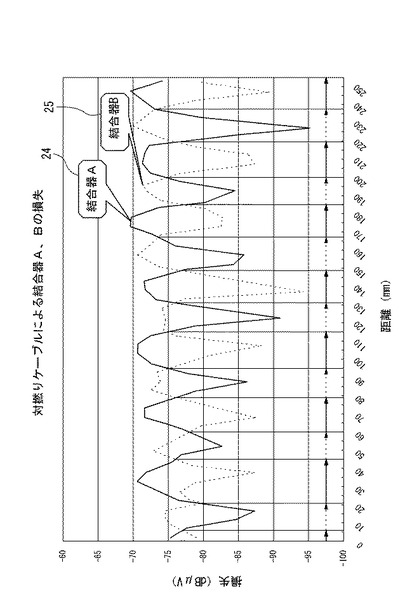
図5は、対撚りケーブル4の長さ位置と各結合器24,25の伝送損失の関係の一例を示すグラフである。
この図5に示すように、本実施形態では、各結合器24,25を、対撚りケーブル4の撚りピッチPの1/4の奇数倍だけ離れた状態で配置しているので、一方の結合器24の伝送損失が最大であるときに、他方の結合器25での伝送損失が最小となり、位相が反転した状態で各結合器24,25の伝送損失が変化する。
【0042】
このため、前記切り替え装置26によって両結合器24,25のいずれか一方を選択的に採用した場合に、図5に示す両結合器24,25の損失変動線(実線と破線)のクロス部分が伝送損失の最大限となり、それ以上に伝送損失が増大することがない。
従って、本実施形態における結合器24,25の配置の仕方によれば、対撚りケーブル4に対するデータ信号f3の伝送損失を最小限に抑制することができる。
【0043】
このように、上記構成に係る本実施形態の点検ロボット3によれば、データ伝送用の各結合器24,25が、走行機体16を制御するための制御信号f1の変動の位相が互いに異なるケーブル長さ方向に離れた二つの位置に配置され、これらの結合器24,25で受信した制御信号f1のレベルが大きい方の当該結合器24,25にデータ信号f3の送信元を切り替えるようにしたので、選択された結合器24,25から対撚りケーブル4に送信されるデータ信号f3の劣化が最小限に抑えられ、点検ロボット3からのデータ信号f3を劣化させずにコントローラ5に伝送することができる。
【0044】
また、本実施形態の点検ロボット3によれば、コントローラ5に設けた二つのデータ伝送用の結合器24,25のうちの伝送特性がよい方の結合器24,25によってデータ信号f3をコントローラ5に送信するようにしたので、複数の周波数帯域を受信するための回路構成をコントローラ5において採用する必要がなく、しかも、点検ロボット3とコントローラ5の間で周波数切り替えのための制御通信を行う必要もない。このため、システム全体の回路構成及び通信方式が簡便になる。
【0045】
更に、本実施形態では、切り替え装置26を、データ伝送用の各結合器24,25とともに点検ロボット3側に搭載し、各結合器24,25が受信した制御信号f1のレベル比較と結合器の切り替え制御を点検ロボット3において行っている。その上で、データ信号f3のガードビットにおいて結合器24,25を切り替えるタイミング調整を点検ロボット3において行うようにしたので、データ信号f3の送信と干渉しないように結合器24,25の切り替えタイミングを調整することができ、コントローラ5に対するデータ信号f3の伝送を適切に行うことができる。
【0046】
なお、本発明は上記実施形態に限定されるものではない。
例えば、上記実施形態では、本発明の無線伝送システムを構造物の点検装置1に採用した場合を例示したが、この伝送システムは、例えば物流分野の搬送装置等、その他の装置に適用することもできる。
また、上記実施形態では、MPEG信号の多値化したデジタル変調方式として、QPSK方式を採用しているが、これに限られるものではなく、例えばBPSK方式や8PSK方式等の他の変調方式を採用することもできる。
また、上記実施形態では、データ伝送用の結合器24,25を二つ設けているが、当該結合器を三つ以上設けることにしてもよい。この場合には、前記切り替え装置26において、データ信号f3の送信元を、複数の結合器のうちで対撚りケーブル4から受信する制御信号f1のレベルが最も大きい結合器に切り替えるようにすればよい。
【0047】
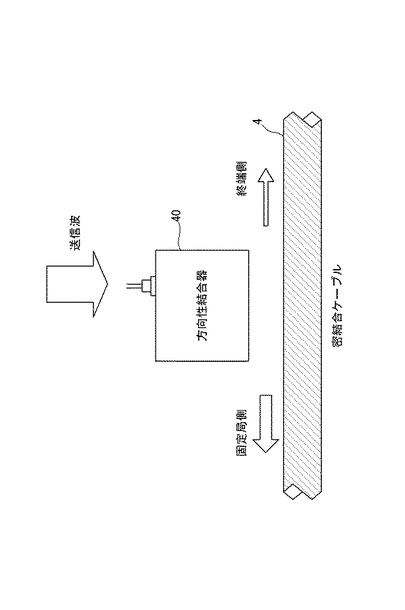
更に、点検ロボット3に設けるデータ伝送用の各結合器24,25として、図6に示す方向性結合器40を採用することにしてもよい。この方向性結合器40は、その内部の回転体を回すことで発信電波(送信波)の方向性を変更することができる。
本実施形態では、対撚りケーブル4の始端側(図6の左側)にコントローラ5が接続されているので、結合器40から始端側へデータ信号f3の電波が送られれば十分であり、終端側(図6の右側)へ伝搬する電波は不要である。仮に、終端側に大きなレベルの電波が発射されると、その高レベルの電波が対撚りケーブル4の終端で反射して始端側へ送られた電波と干渉し、コントローラ5に送るべきデータ信号f3に悪影響を与える。
【0048】
そこで、方向性結合器40の回転体を操作して、当該結合器40からの発信電波の方向性を対撚りケーブル4とコントローラ5との接続側である始端側(図6の左側)に向けるようにすれば、上記した対撚りケーブル4内での電波の干渉が抑制され、点検ロボット3からのデータ信号f3を確実にコントローラ5に伝送することができる。
【図面の簡単な説明】
【0049】
【図1】本発明の無線伝送システムを採用した点検装置の概略構成図である。
【図2】点検ロボットの概略構成図である。
【図3】切り替え装置の回路構成を示すブロック図である。
【図4】データ信号のフレーム構造を示す図である。
【図5】対撚りケーブルの長さ位置と各結合器の伝送損失の関係を示すグラフである。
【図6】方向性結合器の機能を示す拡大図である。
【符号の説明】
【0050】
1 点検装置
2 走行レール
3 点検ロボット(移動局)
4 対撚りケーブル
5 コントローラ(固定局)
6 終端器又は中継器
8 デュプレクサ
9 QPSK復調器
11 制御装置
10 制御用送受信器
12 操作卓
13 デジタルエンコーダ
14 映像モニタ
16 走行機体
17 駆動制御部
18 データ伝送部
19 制御信号用の結合器C
20 制御信号用の変復調器
21 制御装置
22 駆動装置
24 データ伝送用の結合器A
25 データ伝送用の結合器B
26 結合器の切り替え装置(切り替え手段)
27 テレビカメラ
28 集音マイク
29 デジタルエンコーダ
30 QPSK変調器
31 デュプレクサ
32 デュプレクサ
33 受信器
34 受信器
35 レベル比較回路
36 タイミング調整回路(タイミング調整手段)
37 結合器の切り替えスイッチ
40 方向性結合器
f1 制御信号(受信信号)
f2 状態信号
f3 データ信号
【技術分野】
【0001】
本発明は、遠隔操作による点検装置として利用するのに好適な無線伝送システムとその移動局に関し、特に、密結合無線伝送方式で信号伝送を行う無線伝送システムとその移動局に関するものである。
【背景技術】
【0002】
従来から、高速道路や橋梁の床版、トンネルの上半部分といった高所で危険を伴う被検査箇所の点検を行うために、遠隔操作で自動走行する点検ロボットを有する点検装置が既に開発されている。かかる点検装置では、固定局であるコントローラとカメラを有する移動局である点検ロボットの間の信号伝送として、ケーブルが不要で小型化が可能な無線伝送方式を用いるのが一般的である(特許文献1参照)。
【0003】
このようなケーブル無しの無線伝送方式の場合には、送信出力が小さく電波使用の免許が不要な特定小電力無線を採用すればよいが、法令で電界強度が制限されているため、伝送可能距離が限られるという欠点がある。そこで、本出願人は、そのような欠点のない密結合無線伝送方式を採用した点検装置を既に開発している(特許文献2参照)。
【0004】
この点検装置では、移動局である点検ロボットの走行方向に沿ってケーブルが敷設され、そのケーブルを固定局であるコントローラと接続することによって構成されており、点検ロボットに設けられた結合器をケーブルに密着又は近接させて無線信号の送受信を行うことにより、ケーブルを介して固定局と移動局の間で、移動局のカメラで撮影した映像信号を無線で送受信するものである。このような密結合無線伝送方式を採用することにより、法令で定められた電界強度を遵守しながら、伝送可能距離を延長することができる。
【0005】
かかる密結合無線伝送方式によって固定局と移動局の間で映像信号を伝送するに当たって、対撚りケーブルを利用した誘導無線方式で映像をアナログ伝送することもあるが、この場合には安定した高画質の映像信号の伝送が困難であり、伝送路の状況によって映像品質が著しく変動するという問題がある。
特に、最近の画像処理技術の進歩に伴い、撮影した映像をデジタル画像処理することによって迅速かつ精度のよい点検が可能となるが、その実現のためには固定局であるコントローラに高品質な映像信号を伝送する必要がある。
【0006】
このため、特許文献2に記載の点検ロボット装置では、映像品質を向上するためにQPSK方式等の多値化したデジタル変調方式を採用し、ケーブルを通じてその変調された映像信号をデジタル伝送するようにしている。
【特許文献1】特開平8−128015号公報
【特許文献2】特開2006−42020号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
ところで、デジタル変調方式で大容量の映像信号を伝送するには、広い周波数帯域を必要とすることから、映像信号は高い搬送波周波数を有する無線信号に変調されて伝送される。しかし、高周波数領域では、ケーブル内の伝送路が分布定数回路となるため、移動局である点検ロボットとケーブルとの位置関係によって信号の伝送特性が大きく変動する。
【0008】
そのため、点検ロボットが撮影を行いながらレール上を移動すると、ケーブルに対する相対位置の変化によって信号の伝送特性に変動が生じ、このため、コントローラで受信する無線信号のレベルにも変動が生じる。
そこで、前記特許文献2に記載の点検装置では、デジタル画像の安定化のために複数の送信周波数を設定し、受信側のコントローラにおいて受信状態のよい周波数を選択して映像信号を伝送するようにしている。
【0009】
しかし、このような伝送方式では、映像信号の送信側の点検ロボットだけでなく、受信側のコントローラについても複数の周波数帯域での受信を可能とする必要があるので、固定局の回路構成が複雑になる。また、この場合には、点検ロボットとコントローラの間で周波数切り替えのための制御通信を行う必要があるので、両者間の通信方式が複雑になるという欠点もある。
【0010】
一方、後述の実施形態でも述べる通り、伝送媒体が対撚りケーブルの場合には、そのケーブルを構成する二本の電線の向きにより結合器の伝送特性が大きく変化する。このため、点検ロボットが撮影を行いながらレール上を移動すると、結合器の伝送特性は、ケーブルの分布定数回路に基づく変化よりも小さいピッチで変化するが、特許文献2に記載の点検装置では、このようなケーブルの撚り構造に伴う伝送特性の変化に対する対策については、何ら考慮されていない。
【0011】
本発明は、このような実情に鑑み、回路構成や通信方式の複雑化を招来することなく、高品質なデータ伝送が可能な密結合無線伝送方式による無線伝送システムを提供することを目的とする。
また、本発明は、対撚りケーブルを採用する場合であっても、高品質なデータ伝送が可能な密結合無線伝送方式による無線伝送システムを提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明は、固定局に接続されている対撚りケーブルを介して、映像を含むデータ信号を前記固定局に対して無線で送信するデータ伝送用の結合器を複数備えている無線伝送システムの移動局であって、前記複数の結合器は、前記対撚りケーブルから受信した受信信号のレベル変動の位相が互いに異なるように配置されており、前記データ信号の送信元を前記複数の結合器のうちで前記受信信号のレベルが最も大きい結合器に切り替える切り替え手段を備えていることを特徴とする。
【0013】
上記した本発明の移動局によれば、データ伝送用の複数の結合器が、対撚りケーブルから受信した受信信号のレベル変動の位相が互いに異なるように配置されており、これらの結合器のうちで前記受信信号のレベルが最も大きい結合器にデータ信号の送信元を切り替え手段によって切り替えるようにしたので、選択された結合器から対撚りケーブルに送信されるデータ信号の劣化が最小限に抑えられ、移動局からのデータ信号を劣化させずに固定局に伝送することができる。
【0014】
また、本発明の移動局によれば、移動局に設けた複数のデータ伝送用の結合器のうちの伝送特性がよい方の結合器によってデータ信号を固定局に送信するようにしたので、従来のように複数の周波数帯域を受信するための回路構成を固定局において採用する必要がなく、しかも、移動局と固定局の間で周波数切り替えのための制御通信を行う必要もない。このため、システム全体の回路構成及び通信方式が簡便になる。
なお、本発明において、移動局側の複数の結合器が対撚りケーブルから受信する受信信号としては、具体的には、固定局から対撚りケーブルを介して送信される、当該移動局を遠隔操作するための制御信号を利用することができる。
【0015】
本発明において、前記切り替え手段を固定局に設けてもよいが、この場合には、移動局側の各結合器が受信した受信信号のレベル比較と結合器の切り替え制御を、固定局側において行うことになるが、そのような制御を移動局と固定局との間で正確に同期をとって行うことは困難である。このため、固定局から結合器の切り替えを行うための制御信号がデータ信号と干渉し、固定局に対するデータ信号の伝送が阻害され得るという不都合が生じる。
【0016】
そこで、前記切り替え手段は、データ伝送用の各結合器とともに移動局側に搭載することが推奨される。
この場合には、各結合器が受信した受信信号のレベル比較と結合器の切り替え制御を移動局において行うことになるので、例えば、データ信号のガードビットにおいて切り替え手段を作動させるタイミング調整手段を更に移動局に設けることにより、データ信号の送信と干渉しないように結合器の切り替えタイミングを調整でき、固定局に対するデータ信号の伝送を適切に行うことができる。
【0017】
本発明において、データ伝送用の各結合器間の距離は、各結合器における制御信号の変動の位相が揃わないものであれば、特定の距離に限定されるものではないが、それらの複数の結合器は、前記受信信号のレベル変動の位相が互いに反転する位置に配置することが好ましい。このような結合器の配置は、より具体的には、移動局の移動方向であるケーブル長さ方向において、対撚りケーブルの撚りピッチの1/4の奇数倍だけ離れた位置に配置することによって実現することができる。
この場合には、一方の結合器での伝送損失が最大であるときに、他方の結合器での伝送損失が最小となるので、切り替え手段によってこれらの結合器のいずれか一方を選択的に採用した場合における、対撚りケーブルに対するデータ信号の伝送損失を最小限に抑制することができる。
【0018】
また、本発明において、データ伝送用の複数の結合器にそれぞれデュプレクサを接続することにより、各結合器が受信する微弱な受信信号(後述の実施形態における制御信号)が、各結合器から送信されるデータ信号から受ける影響を極力小さくすることができ、これにより、結合器の切り替え制御をより確実に行うことができる。
更に、本発明において、複数の結合器として、発信電波の方向性を対撚りケーブルと固定局との接続側に向けることができる方向性結合器を採用すれば、対撚りケーブル内での電波の干渉が抑制され、対撚りケーブルに対する方向性が一定である通常の結合器に比べて、移動局からのデータ信号をより確実に固定局に伝送することができる。
【発明の効果】
【0019】
以上説明した通り、本発明によれば、回路構成や通信方式の複雑化を招来することなく、移動局からのデータ信号を劣化させずに固定局に伝送できるので、高品質なデータ伝送が可能な密結合無線伝送方式による無線伝送システムを安価に提供することができる。
【発明を実施するための最良の形態】
【0020】
以下、図面に基づいて、本発明の実施形態を説明する。
〔点検装置の全体構成〕
図1は、本発明の無線伝送システムを採用した点検装置の概略構成図である。
本実施形態の点検装置1は、高速道路や橋梁の床版等の高所にある被検査箇所の点検を遠隔操作で行うためのものであり、図1に示すように、橋梁等の構造物の下方に敷設された走行レール2に走行自在に設けられた移動局としての点検ロボット3と、走行レール2に沿って敷設された対撚りケーブル4と、このケーブル4の一端に接続された固定局としてのコントローラ5とから構成されている。
【0021】
対撚りケーブル4の他端には、終端器6が接続されている。また、図1に示す例では、コントローラ5に対撚りケーブル4が直結されているが、コントローラ5とケーブル4とは図示しない整合器を介して間接的に接続するようにしてもよい。
図1及び図2を参照して点検装置1の全体構成と動作を説明すると、まず、点検ロボット3は、走行レール2を走行しながらテレビカメラ27で点検対象物を撮影するとともに、集音マイク28で点検対象物周辺の音声を取得する。
【0022】
その映像と音声の信号(以下、データ信号f3という。)は、データ信号用の結合器24,25から対撚りケーブル4に送信され、このケーブル4を介してコントローラ5に伝送される。
点検ロボット3は、現在位置、走行速度、テレビカメラ方向及びバッテリー残量などの運転状態の信号(以下、状態信号f2という。)を、前記結合器24,25とは別に設けられた制御用の結合器19及び対撚りケーブル4を介してコントローラ5へ送信する。
【0023】
コントローラ5は、ケーブル4を介して点検ロボット3からデータ信号f3と状態信号f2を受信し、テレビモニタ14に映像を表示しかつ音声を出力する。更に、コントローラ5は、点検ロボット3の運転状態をテレビモニタ14に表示する。
点検を行うユーザは、コントローラ5に表示される点検ロボット3の運転状態を確認しながら、テレビモニタ14上に表示される映像と音声出力を参照して点検作業を行うことができる。更に、ユーザは、コントローラ5の操作装置12を用いて、点検ロボット3の前進及び後退や停止等の操作や、テレビカメラ27の上下左右方向の旋回の操作を行うことができる。
【0024】
コントローラ5は、上記したユーザの操作を受けて、点検ロボット3に対して操作を指示する信号(以下、制御信号f1という。)を生成し、その制御信号f1を対撚りケーブル4を介して点検ロボット3へ送信する。
点検ロボット3は、制御用の結合器19を介してコントローラ5からの上記制御信号f1を受信し、ユーザの操作指示に応じて各部位を動作するようになっている。
【0025】
対撚りケーブル4は、密結合無線伝送方式に適したケーブルであり、二本の電線をほぼ一定のピッチで撚り合わせて対にしたツイストペアケーブルよりなる。このケーブル4には、シールドの無いものが使用されている。また、対撚りケーブル4は、走行レール2に沿って敷設されており、対撚りケーブル4の両端にはコントローラ5と終端器6がそれぞれ接続されている。この終端器6は対撚りケーブル4の終端部での反射波の発生を抑制するものである。
なお、対撚りケーブル4は、無線信号を増幅させる中継器(図示しない)を介して他の対撚りケーブル4と接続することにより、伝送距離を延長させることもできる。
【0026】
〔コントローラの構成〕
図1に示すように、前記コントローラ5は、対撚りケーブル4に接続されたデュプレクサ8と、このデュプレクサ8にそれぞれ接続されたQPSK(Quadruple Phase Shift Keying:4相位相変調)方式による復調器9と、制御用送受信器10とを備えている。
制御用送受信器10は、例えばFSK(Frequency Shift Keying:周波数偏移変調)方式等によって点検ロボット3の遠隔操作を行うための制御信号f1を途切れなく送信することができ、この制御信号f1に対応する状態信号f2を受信することができる。
【0027】
制御用送受信器10には制御装置11が接続され、この制御装置11には操作装置12が接続されている。制御装置11は、送受信器10から入力された状態信号f2の復調信号に基づいて、操作装置12に設けてある表示部に対して、前進又は後進等の運動表示を切り替える。
また、制御装置11は、操作装置12に設けてある操作レバーからの操作信号を送受信器10に出力する。送受信器10は、その操作信号を例えばFSK変調方式で制御信号f1に変調して、その制御信号f1をデュプレクサ8を介して対撚りケーブル4に送信する。
【0028】
QPSK復調器9は、点検ロボット3からのQPSK変調波よりなるデータ信号f3をMPEG信号に復調し、この信号をデジタルデコーダ13に出力する。このデコーダ13は、復調器9から受けたMPEG信号をアナログの映像信号及び音声信号に変換し、テレビモニタ14よりなる表示装置に出力する。テレビモニタ14は、デジタルデコーダ13からの映像信号及び音声信号に基づいて、所定の映像表示及び音声出力を行う。
【0029】
〔点検ロボットの構成〕
図2は、本実施形態の点検ロボット3の概略構成図である。
図2に示すように、この点検ロボット3は、対撚りケーブル4に沿って移動自在な走行機体16と、この走行機体16に搭載された駆動制御部17及びデータ伝送部18とを備えている
このうち、駆動制御部17は、ケーブル4に密着又は近接した状態で配置された制御用の結合部19と、制御信号用の変復調器20と、制御装置21と、駆動装置22とを備えている。
【0030】
制御用の結合器19は、ループアンテナを内部に有しており、対撚りケーブル4に状態信号f2を送信し、同ケーブル4からの制御信号f1を受信する。
制御信号用の変復調器20は、結合器19から受けた制御信号f1を例えばFSK変調方式で復調し、その復調信号を制御装置21に出力する。制御装置21は、その復調信号に基づいて駆動装置22を制御する。
この駆動装置22は、走行機体16の駆動モータ及びテレビカメラ27の旋回モータ等よりなり、制御装置21の指令に基づいて、走行機体16を前進又は後進ないし停止させ、或いは、テレビカメラ27に上下左右方向の旋回運動を行わせる。
【0031】
また、制御装置21は、駆動装置22の運動状態(上記駆動モータや旋回モータの回転方向や作動状態等)を常時把握しており、その状態を示すアナログ信号を制御信号用の変復調器20に出力している。そして、この変復調器20は、制御装置21からの制御信号を例えばFSK変調方式で状態信号f2に変調し、この状態信号f2は、前記結合器19を介して対撚りケーブル4に送信される。
【0032】
前記データ伝送部18は、点検ロボット3の移動方向であるケーブル長さ方向に離れた二つの位置にそれぞれ配置された特性が揃った一対のデータ伝送用の結合器24,25と、この両結合器24,25が接続された切り替え装置26と、点検対象物を撮影するためのテレビカメラ27と、点検対象物の周辺の音声を拾う集音マイク28と、そのカメラ27及びマイク28に接続されたデジタルエンコーダ29と、このエンコーダ29に接続されたQPSK変調器30とから構成されている。
【0033】
テレビカメラ27は、カメラレンズを通して撮影した点検対象物の映像を電気的な信号に変換して、デジタルエンコーダ29に出力し、集音マイク28は、取得した音声を電気的な信号に変換して、同エンコーダ29に出力する。
デジタルエンコーダ29は、テレビカメラ27からの映像信号と集音マイク28からの音声信号を、映像音声のデジタル信号であるMPEG信号に変換し、この信号をQPSK変調器30に出力する。
【0034】
本実施形態のデジタルエンコーダ29は、映像及び音声信号に対して同期用のプリアンブルやリードソロモン誤り訂正符号を付加するとともに、所定のガードビットを付加して例えば図4に示すフレームを作成する符号変換機能を有し、この各フレームをQPSK変調器30に出力する。
QPSK変調器30は、MPEG信号よりなるデータ信号f3のフレームをQPSK方式によってQPSK変調波に変調し、この変調波を前記切り替え装置26に出力する。切り替え装置26は二つの結合器24,25のうちのいずれか一方を選択し、この選択された結合器24,25がQPSK変調波よりなるデータ信号f3を対撚りケーブル4に送信する。
【0035】
図3は、切り替え装置26の回路構成を示すブロック図である。
図3に示すように、データ伝送用の各結合器24,25は、ループアンテナを内部に有しており、対撚りケーブル4にQPSK変調波よりなるデータ信号f3を送信し、同ケーブル4からの制御信号f1を受信するものである。
本実施形態の切り替え装置(切り替え手段)26は、データ伝送用の各結合器24,25に接続された一対のデュプレクサ31,32と、これらのデュプレクサ31,32にそれぞれ接続された一対の受信器33,34と、この各受信器33,34が接続されたレベル比較器35と、データ信号f3の送信タイミングを調整するタイミング調整回路36と、この調整回路36の指示に従って結合器24,25を切り替えるスイッチ37とを備えている。
【0036】
各デュプレクサ31,32は、結合器24,25のアンテナ端子と送信側であるスイッチ37の端子の間に接続された送信フィルタと、同アンテナ端子と受信端子との間に接続された分波回路及び受信フィルタによって構成されている。また、各デュプレクサ31,32に含まれる分波回路は、送受信信号(この場合は、データ信号f3と制御信号f1)が互いに相手方の回路に与える影響を遮断する。
【0037】
このため、送信側端子からの送信信号であるデータ信号f3が受信側端子に達することなく、結合器24,25のアンテナ端子に送出され、かつ、アンテナ端子より供給される受信信号である制御信号f1が送信側端子に達することなく受信側端子へと供給されるようになっており、これにより、各結合器24,25が受信する微弱な制御信号f1が、各結合器24,25から送信するデータ信号f3から受ける影響が小さくなり、結合器24,25の切り替え制御をより確実に行うことができる。
【0038】
各受信器33,34はレベル比較回路35に常に制御信号f1を出力しており、レベル比較回路35は、いずれの結合器24,25からの制御信号f1が大きいか否かを判定し、その結果をタイミング調整回路36に出力する。
タイミング調整回路36は、レベル比較回路35からの判定結果に基づいて、制御信号f1が大きい方の結合器24,25にQPSK変調器30からのデータ信号f3が送られるよう、スイッチ37を切り替える。
【0039】
また、タイミング調整回路36は、デジタルエンコーダ29から転送されたMPEG信号に基づいて、データ信号f3に含まれているガードビットのタイミングを認識し、この間隔においてスイッチ37に切り替え動作させるようになっている。
ところで、対撚りケーブル4は、二本の電線をほぼ一定のピッチで撚り合わせて対にした構造になっているので、二本の電線が水平に並ぶ位置Q1では、結合器24,25の伝送レベルが最大(伝送損失が最小)となり、逆に、二本の電線が垂直に並ぶ位置Q2では、結合器24,25の伝送レベルが最小(伝送損失が最大)となる。
【0040】
このため、対撚りケーブル4の撚りピッチをPとすると、データ伝送用の各結合器24,25における伝送損失は、ほぼ半ピッチ(0.5×P)の周期で最大と最小を繰り返して変動するものとなる。そこで、本実施形態では、対撚りケーブル4の撚りピッチPに対して、両結合器24,25がP×(1/4)×n(ただしnは奇数)だけ離れた状態となるように、走行機体16に両結合器24,25を設置し、これにより、各結合器24,25での制御信号f1の変動の位相が反転するようにした。
【0041】
図5は、対撚りケーブル4の長さ位置と各結合器24,25の伝送損失の関係の一例を示すグラフである。
この図5に示すように、本実施形態では、各結合器24,25を、対撚りケーブル4の撚りピッチPの1/4の奇数倍だけ離れた状態で配置しているので、一方の結合器24の伝送損失が最大であるときに、他方の結合器25での伝送損失が最小となり、位相が反転した状態で各結合器24,25の伝送損失が変化する。
【0042】
このため、前記切り替え装置26によって両結合器24,25のいずれか一方を選択的に採用した場合に、図5に示す両結合器24,25の損失変動線(実線と破線)のクロス部分が伝送損失の最大限となり、それ以上に伝送損失が増大することがない。
従って、本実施形態における結合器24,25の配置の仕方によれば、対撚りケーブル4に対するデータ信号f3の伝送損失を最小限に抑制することができる。
【0043】
このように、上記構成に係る本実施形態の点検ロボット3によれば、データ伝送用の各結合器24,25が、走行機体16を制御するための制御信号f1の変動の位相が互いに異なるケーブル長さ方向に離れた二つの位置に配置され、これらの結合器24,25で受信した制御信号f1のレベルが大きい方の当該結合器24,25にデータ信号f3の送信元を切り替えるようにしたので、選択された結合器24,25から対撚りケーブル4に送信されるデータ信号f3の劣化が最小限に抑えられ、点検ロボット3からのデータ信号f3を劣化させずにコントローラ5に伝送することができる。
【0044】
また、本実施形態の点検ロボット3によれば、コントローラ5に設けた二つのデータ伝送用の結合器24,25のうちの伝送特性がよい方の結合器24,25によってデータ信号f3をコントローラ5に送信するようにしたので、複数の周波数帯域を受信するための回路構成をコントローラ5において採用する必要がなく、しかも、点検ロボット3とコントローラ5の間で周波数切り替えのための制御通信を行う必要もない。このため、システム全体の回路構成及び通信方式が簡便になる。
【0045】
更に、本実施形態では、切り替え装置26を、データ伝送用の各結合器24,25とともに点検ロボット3側に搭載し、各結合器24,25が受信した制御信号f1のレベル比較と結合器の切り替え制御を点検ロボット3において行っている。その上で、データ信号f3のガードビットにおいて結合器24,25を切り替えるタイミング調整を点検ロボット3において行うようにしたので、データ信号f3の送信と干渉しないように結合器24,25の切り替えタイミングを調整することができ、コントローラ5に対するデータ信号f3の伝送を適切に行うことができる。
【0046】
なお、本発明は上記実施形態に限定されるものではない。
例えば、上記実施形態では、本発明の無線伝送システムを構造物の点検装置1に採用した場合を例示したが、この伝送システムは、例えば物流分野の搬送装置等、その他の装置に適用することもできる。
また、上記実施形態では、MPEG信号の多値化したデジタル変調方式として、QPSK方式を採用しているが、これに限られるものではなく、例えばBPSK方式や8PSK方式等の他の変調方式を採用することもできる。
また、上記実施形態では、データ伝送用の結合器24,25を二つ設けているが、当該結合器を三つ以上設けることにしてもよい。この場合には、前記切り替え装置26において、データ信号f3の送信元を、複数の結合器のうちで対撚りケーブル4から受信する制御信号f1のレベルが最も大きい結合器に切り替えるようにすればよい。
【0047】
更に、点検ロボット3に設けるデータ伝送用の各結合器24,25として、図6に示す方向性結合器40を採用することにしてもよい。この方向性結合器40は、その内部の回転体を回すことで発信電波(送信波)の方向性を変更することができる。
本実施形態では、対撚りケーブル4の始端側(図6の左側)にコントローラ5が接続されているので、結合器40から始端側へデータ信号f3の電波が送られれば十分であり、終端側(図6の右側)へ伝搬する電波は不要である。仮に、終端側に大きなレベルの電波が発射されると、その高レベルの電波が対撚りケーブル4の終端で反射して始端側へ送られた電波と干渉し、コントローラ5に送るべきデータ信号f3に悪影響を与える。
【0048】
そこで、方向性結合器40の回転体を操作して、当該結合器40からの発信電波の方向性を対撚りケーブル4とコントローラ5との接続側である始端側(図6の左側)に向けるようにすれば、上記した対撚りケーブル4内での電波の干渉が抑制され、点検ロボット3からのデータ信号f3を確実にコントローラ5に伝送することができる。
【図面の簡単な説明】
【0049】
【図1】本発明の無線伝送システムを採用した点検装置の概略構成図である。
【図2】点検ロボットの概略構成図である。
【図3】切り替え装置の回路構成を示すブロック図である。
【図4】データ信号のフレーム構造を示す図である。
【図5】対撚りケーブルの長さ位置と各結合器の伝送損失の関係を示すグラフである。
【図6】方向性結合器の機能を示す拡大図である。
【符号の説明】
【0050】
1 点検装置
2 走行レール
3 点検ロボット(移動局)
4 対撚りケーブル
5 コントローラ(固定局)
6 終端器又は中継器
8 デュプレクサ
9 QPSK復調器
11 制御装置
10 制御用送受信器
12 操作卓
13 デジタルエンコーダ
14 映像モニタ
16 走行機体
17 駆動制御部
18 データ伝送部
19 制御信号用の結合器C
20 制御信号用の変復調器
21 制御装置
22 駆動装置
24 データ伝送用の結合器A
25 データ伝送用の結合器B
26 結合器の切り替え装置(切り替え手段)
27 テレビカメラ
28 集音マイク
29 デジタルエンコーダ
30 QPSK変調器
31 デュプレクサ
32 デュプレクサ
33 受信器
34 受信器
35 レベル比較回路
36 タイミング調整回路(タイミング調整手段)
37 結合器の切り替えスイッチ
40 方向性結合器
f1 制御信号(受信信号)
f2 状態信号
f3 データ信号
【特許請求の範囲】
【請求項1】
固定局に接続されている対撚りケーブルを介して、映像を含むデータ信号を前記固定局に対して無線で送信するデータ伝送用の結合器を複数備えている無線伝送システムの移動局であって、
前記複数の結合器は、前記対撚りケーブルから受信した受信信号のレベル変動の位相が互いに異なるように配置されており、
前記データ信号の送信元を前記複数の結合器のうちで前記受信信号のレベルが最も大きい結合器に切り替える切り替え手段を備えていることを特徴とする無線伝送システムの移動局。
【請求項2】
前記複数の結合器は、前記受信信号のレベル変動の位相が互いに反転する位置に配置されている請求項1に記載の無線伝送システムの移動局。
【請求項3】
前記複数の結合器は、当該移動局の移動方向であるケーブル長さ方向において、前記対撚りケーブルの撚りピッチの1/4の奇数倍だけ離れた位置に配置されている請求項1又は2に記載の無線伝送システムの移動局。
【請求項4】
前記結合器の切り替え手段は、前記データ信号のガードビットにおいて前記結合器の切り替えを行うタイミング調整手段を備えている請求項1〜3のいずれか1項に記載の無線伝送システムの移動局。
【請求項5】
前記複数の結合器にそれぞれデュプレクサが接続されている請求項1〜4のいずれか1項に記載の無線伝送システムの移動局。
【請求項6】
前記複数の結合器は、発信電波の方向性を前記対撚りケーブルと前記固定局との接続側に向けることができる方向性結合器よりなる請求項1〜5のいずれか1項に記載の無線伝送システムの移動局。
【請求項7】
対撚りケーブルと、このケーブルに沿って移動自在でかつ映像を含むデータ信号を前記ケーブルに対して無線送信するデータ伝送用の結合器を有する移動局と、前記ケーブルに接続されかつこのケーブルを介して前記結合器からのデータ信号を受信する固定局と、を備えている無線伝送システムにおいて、
前記移動局は、前記対撚りケーブルから受信した受信信号のレベル変動の位相が互いに異なるように配置された複数の結合器を備え、
前記移動局又は前記固定局は、前記データ信号の送信元を前記複数の結合器のうちで前記受信信号のレベルが最も大きい結合器に切り替える切り替え手段を備えていることを特徴とする無線伝送システム。
【請求項1】
固定局に接続されている対撚りケーブルを介して、映像を含むデータ信号を前記固定局に対して無線で送信するデータ伝送用の結合器を複数備えている無線伝送システムの移動局であって、
前記複数の結合器は、前記対撚りケーブルから受信した受信信号のレベル変動の位相が互いに異なるように配置されており、
前記データ信号の送信元を前記複数の結合器のうちで前記受信信号のレベルが最も大きい結合器に切り替える切り替え手段を備えていることを特徴とする無線伝送システムの移動局。
【請求項2】
前記複数の結合器は、前記受信信号のレベル変動の位相が互いに反転する位置に配置されている請求項1に記載の無線伝送システムの移動局。
【請求項3】
前記複数の結合器は、当該移動局の移動方向であるケーブル長さ方向において、前記対撚りケーブルの撚りピッチの1/4の奇数倍だけ離れた位置に配置されている請求項1又は2に記載の無線伝送システムの移動局。
【請求項4】
前記結合器の切り替え手段は、前記データ信号のガードビットにおいて前記結合器の切り替えを行うタイミング調整手段を備えている請求項1〜3のいずれか1項に記載の無線伝送システムの移動局。
【請求項5】
前記複数の結合器にそれぞれデュプレクサが接続されている請求項1〜4のいずれか1項に記載の無線伝送システムの移動局。
【請求項6】
前記複数の結合器は、発信電波の方向性を前記対撚りケーブルと前記固定局との接続側に向けることができる方向性結合器よりなる請求項1〜5のいずれか1項に記載の無線伝送システムの移動局。
【請求項7】
対撚りケーブルと、このケーブルに沿って移動自在でかつ映像を含むデータ信号を前記ケーブルに対して無線送信するデータ伝送用の結合器を有する移動局と、前記ケーブルに接続されかつこのケーブルを介して前記結合器からのデータ信号を受信する固定局と、を備えている無線伝送システムにおいて、
前記移動局は、前記対撚りケーブルから受信した受信信号のレベル変動の位相が互いに異なるように配置された複数の結合器を備え、
前記移動局又は前記固定局は、前記データ信号の送信元を前記複数の結合器のうちで前記受信信号のレベルが最も大きい結合器に切り替える切り替え手段を備えていることを特徴とする無線伝送システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2008−85890(P2008−85890A)
【公開日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願番号】特願2006−265697(P2006−265697)
【出願日】平成18年9月28日(2006.9.28)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
【公開日】平成20年4月10日(2008.4.10)
【国際特許分類】
【出願日】平成18年9月28日(2006.9.28)
【出願人】(504126112)住友電工システムソリューション株式会社 (78)
【Fターム(参考)】
[ Back to top ]