
無線受信装置及び航法データ取得方法
【課題】測位の時間を短縮し、測位成功確率を高めるとともに、消費電力を削減すること。
【解決手段】SPS受信部150は、航法データを間欠的に含むSPS信号を間欠受信する。測位演算部105は、SPS受信部150により受信したSPS信号より航法データを取得して測位を行う。航法データ取得判定部107は、測位演算部105において航法データの取得が可能である場合に、航法データの取得が完了するまでSPS受信部150におけるSPS信号の受信を継続させる。
【解決手段】SPS受信部150は、航法データを間欠的に含むSPS信号を間欠受信する。測位演算部105は、SPS受信部150により受信したSPS信号より航法データを取得して測位を行う。航法データ取得判定部107は、測位演算部105において航法データの取得が可能である場合に、航法データの取得が完了するまでSPS受信部150におけるSPS信号の受信を継続させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、特に衛星からの信号を受信して測位を行う無線受信装置及び航法データ取得方法に関する。
【背景技術】
【0002】
SPS(Satellite Positioning System)受信装置は、GPS(Global Positioning System)衛星などから送信される測位データを含む電波を受信して現在位置を検出する装置である。また、SPS受信装置は、車両の位置を報知するカーナビゲーション装置または位置検出機能を備える携帯電話等に用いられている。
【0003】
衛星から送信される測位データを含む信号(以下「SPS信号」と記載する)の受信には比較的大きな電流消費を伴う。従って、バッテリーで動作するSPS受信装置を長時間駆動させるためには、電流の消費を抑制する必要がある。そのため、従来、測位を間欠的に行うSPS受信装置が提案されている(例えば、特許文献1)。
【0004】
また、SPS受信装置は、SPS信号を受信することにより、疑似距離と航法データとを取得して測位を行う。また、航法データには有効期限が設けられているため、SPS受信装置は、測位を行うためには、航法データを度々取得する必要がある。
【0005】
しかしながら、SPS受信装置は、疑似距離の取得に比べて、航法データの取得は容易ではない。具体的には、GPS信号の場合、疑似距離の取得は、SPS信号が信号強度−160dBm程度でも可能であるのに対し、航法データ(エフェメリス)の取得は、−140dBm以上の信号強度が一般的に必要である。GPS信号を−160dBmで受信するには、ビルの陰、窓際または屋外でのカバンの中等でも可能である。一方、GPS信号を−140dBm以上で受信するには、SPS受信装置と衛星との間に妨げるものが無く、かつ見通しがよい場所で受信する必要がある。さらに、GPS信号は30秒周期で繰り返し送出され、航法データはその内の18秒程度のデータである。従って、航法データは、見通しの良い場所で18秒以上継続して受信する必要がある。例えば、GPS受信装置は、航法データの有効期限が切れた際に、ビルの陰または窓際等の航法データを取得することができない環境に位置する場合があり得る。この場合、SPS受信装置は、航法データを取得することができるまで、長時間動作する必要がある。また、SPS受信装置は、長時間動作した場合でも、航法データを取得できない場合には、疑似距離を取得することができても測位を行えないという問題がある。
【0006】
このような問題を解決する技術として、従来、航法データを取得後、一定の時間が経過した際、アラーム音を発生させ、使用者に対し、GPS信号が良好に受信できる環境で30秒連続して計測操作を行うように促すものが知られている(例えば、特許文献2)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平4−370778号公報
【特許文献2】特開2008−241719号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献2においては、使用者が自発的に場所を移動し、30秒という長時間に渡り受信操作をすることは操作性が悪く、さらに受信操作を促したとしても、使用者が移動できない場合があり得る。また、使用者は、移動可能な場合であっても、SPS衛星との見通しが得られているか否かは分からない。従って、特許文献2においては、上記の特許文献1と同様の問題がある。
【0009】
本発明の目的は、測位の時間を短縮することができ、測位成功確率を高めることができるとともに、消費電力を削減することができる無線受信装置及び航法データ取得方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の無線受信装置は、航法データを間欠的に含む測位信号を間欠受信する受信手段と、前記受信手段により受信した前記測位信号より前記航法データを取得して測位を行う測位演算手段と、前記測位演算手段において前記航法データの取得が可能である場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる制御手段と、を具備する構成を採る。
【0011】
本発明の航法データ取得方法は、無線受信装置における航法データ取得方法であって、航法データを間欠的に含む測位信号を間欠受信するステップと、受信した前記測位信号より前記航法データを取得して測位を行うステップと、前記航法データの取得が可能である場合に、前記航法データの取得が完了するまで前記測位信号の受信を継続するステップと、を具備するようにした。
【発明の効果】
【0012】
本発明によれば、測位の時間を短縮することができ、測位成功確率を高めることができるとともに、消費電力を削減することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態に係る無線受信装置の構成を示すブロック図
【図2】本発明の実施の形態に係る無線受信装置の動作を示すフロー図
【図3】従来の測位時のSPS信号を示す図
【図4】本実施の形態の測位時のSPS信号を示す図
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0015】
(実施の形態)
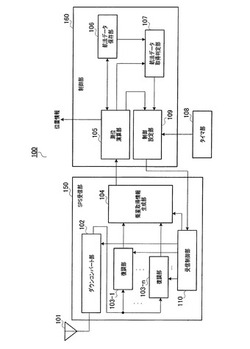
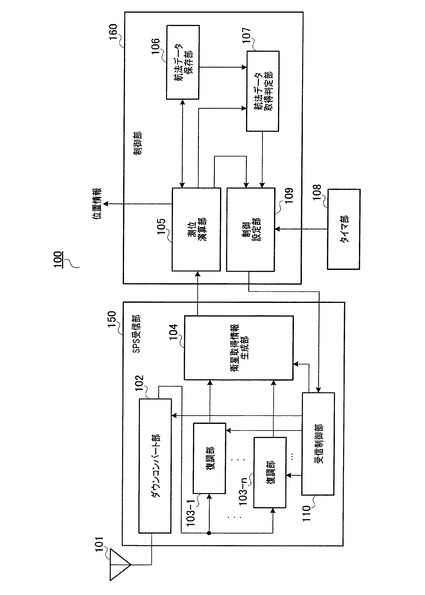
図1は、本発明の実施の形態に係る無線受信装置100の構成を示すブロック図である。無線受信装置100は、例えばSPS受信装置である。
【0016】
無線受信装置100は、アンテナ101と、ダウンコンバート部102と、復調部103−1〜103−nと、衛星取得情報生成部104と、測位演算部105と、航法データ保存部106と、航法データ取得判定部107と、タイマ部108と、制御設定部109と、受信制御部110とから主に構成される。また、SPS受信部150は、ダウンコンバート部102と、復調部103−1〜103−nと、衛星取得情報生成部104と、受信制御部110とを含む。また、制御部160は、測位演算部105と、航法データ保存部106と、航法データ取得判定部107と、制御設定部109とを含む。以下に、各構成について、詳細に説明する。
【0017】
アンテナ101は、SPS衛星から送信されるSPS信号を受信してダウンコンバート部102へ出力する。
【0018】
ダウンコンバート部102は、アンテナ101から入力したSPS信号をダウンコンバートして、IF(Intermediate Frequency)信号に周波数変換する。そして、ダウンコンバート部102は、IF信号を復調部103−1〜103−nへ出力する。
【0019】
復調部103−1〜103−nは、受信制御部110の制御に従って、ダウンコンバート部102から入力したIF信号を復調して衛星取得情報生成部104へ出力する。復調部103−1〜103−nは、存在する衛星の数に対応してn(nは任意の自然数)個設けられている。また、SPS信号は、CDMA(Code Division Multiple Access)方式を用いて送信されるため、復調部103−1〜103−nは、各SPS衛星からの信号が有するCDMAコードにより、IF信号を逆拡散することによりデコードする。
【0020】
また、復調部103−1〜103−nは、複数のSPS衛星からのSPS信号を同時に受信する。また、復調部103−1〜103−nは、同一のSPS衛星からのSPS信号について、逆拡散時における位相及び周波数をシフトして、相関の高い位相及び周波数を見つけて逆拡散を行う。
【0021】
衛星取得情報生成部104は、n個の復調部103−1〜103−nから入力した信号に基づいて、各SPS衛星のSPS衛星取得情報を生成する。そして、衛星取得情報生成部104は、生成したSPS衛星取得情報を測位演算部105へ出力する。ここで、衛星取得情報とは、疑似距離、衛星デコード信号及び信号品質情報である。また、衛星デコード信号は、アルマナック、航法データ及び時刻情報等を含む。また、疑似距離とは、逆拡散時の位相及び周波数の条件から得られる各SPS衛星と無線受信装置100との間の距離である。
【0022】
測位演算部105は、衛星取得情報生成部104から入力した衛星デコード信号から航法データを取得する。また、測位演算部105は、取得した航法データを航法データ保存部106に保存する。また、測位演算部105は、取得した航法データまたは航法データ保存部106に保存されている航法データと、衛星取得情報生成部104から入力した疑似距離を用いて測位演算を行い、無線受信装置100の位置情報を生成する。そして、測位演算部105は、生成した位置情報を外部へ出力する。また、測位演算部105は、SPS信号から航法データが取得されているか否かの判定、または衛星取得情報生成部104から取得した各SPS衛星のSPS信号の受信品質の良否より、航法データ受信可否判定情報を生成して航法データ取得判定部107へ出力する。この際、測位演算部105は、例えば、SNRが規定値以上であるか否かによりSPS信号の受信品質の良否を判断する。そして、測位演算部105は、SNRが規定値以上であればSPS信号の受信品質は良好である航法データ受信可否判定情報を生成する。または、測位演算部105は、SPS信号から航法データが取得されていると判定した場合に、航法データが取得されている航法データ受信可否判定情報を生成する。また、測位演算部105は、測位演算の経過状況を示す演算経過情報を制御設定部109へ出力する。また、測位演算部105は、測位演算により、SPS信号を送出する衛星の設定情報を取得し、取得した衛星の設定情報を制御設定部109へ出力する。ここで、衛星の設定情報は、サーチする衛星番号及び衛星ドップラー信号等を含む。
【0023】
航法データ保存部106は、測位演算部105から入力した航法データを保存する。また、航法データ保存部106は、航法データを保存してからの経過時間を計測する。
【0024】
航法データ取得判定部107は、航法データ内に記載されている有効期限情報を、航法データ保存部106に保存されている航法データから取得する。または、航法データ取得判定部107は、航法データ保存部106が航法データを保存してからの経過時間情報を、航法データ保存部106から取得する。また、航法データ取得判定部107は、測位演算部105から航法データ受信可否判定情報を取得する。また、航法データ取得判定部107は、有効期限情報または経過時間情報と、航法データ受信可否判定情報とに基づいて、GPS測位後も航法データの取得が完了するまで継続してSPS受信部150を動作させるか否かを判定する。例えば、航法データ取得判定部107は、航法データの有効期限の残りが2時間未満になった場合において、受信品質は良好である航法データ受信可否判定情報を得た場合、測位完了後も航法データの取得が完了するまで継続してSPS信号を受信すると判定する。または、航法データ取得判定部107は、航法データの有効期限の残りが2時間未満になった場合において、航法データが取得されている航法データ受信可否判定情報を得た場合、測位完了後も航法データの取得が完了するまで継続してSPS信号を受信すると判定する。または、航法データ取得判定部107は、航法データを取得してからの経過時間が2時間以上の場合において、航法データの受信が可能である航法データ受信可否判定情報を得た場合、測位完了後も航法データの取得が完了するまで継続してSPS信号を受信すると判定する。または、航法データ取得判定部107は、航法データを取得してからの経過時間が2時間以上の場合において、受信品質は良好である航法データ受信可否判定情報を得た場合、測位完了後も航法データの取得が完了するまで継続してSPS信号を受信すると判定する。そして、航法データ取得判定部107は、上記の判定結果である航法データ取得動作判定情報を制御設定部109へ出力する。
【0025】
タイマ部108は、所定のタイマ周期でカウントを行う。
【0026】
制御設定部109は、タイマ部108におけるカウント値に基づいて、間欠的に測位を行うように受信制御部110を制御する。また、制御設定部109は、航法データ取得判定部107から入力した航法データ取得動作判定情報に基づいて、SPS受信部150を動作させるための受信部動作制御信号を受信制御部110へ出力する。具体的には、制御設定部109は、航法データ取得判定部107から入力した航法データ取得動作判定情報が、航法データを取得する判定である場合には、測位演算部105における測位演算が完了し、測位が完了した後もSPS受信部150において継続して航法データを取得する動作を行うように、受信部動作制御信号により受信制御部110を制御する。また、制御設定部109は、航法データ取得判定部107から入力した航法データ受信可否判定情報が、航法データの取得を完了したことを通知する場合には、SPS受信部150の動作を終了させるように、受信部動作制御信号により受信制御部110を制御する。また、制御設定部109は、測位と航法データの取得のいずれも完了せずに一定期間経過した場合には、SPS受信部150の動作を終了させるように、受信部動作制御信号により受信制御部110を制御する。ここで、受信部動作制御信号は、ONまたはOFF等の動作制御、SPS衛星をサーチするための周波数等のサーチ動作情報を含む。また、制御設定部109は、測位演算部105から入力した演算経過情報の測位演算の経過状況に応じて、測位動作の開始または終了の設定を行う。また、制御設定部109は、測位演算部105から入力したSPS信号を送出する衛星の設定情報に基づいて、各復調部103−1〜103−nが動作するパラメータを受信制御部110へ出力する。ここで、各復調部103−1〜103−nが動作するパラメータとは、周波数、位相及びPRN(pseudo-random number、疑似ランダム信号をデコードするための符号)コードである。
【0027】
受信制御部110は、制御設定部109から入力した受信部動作制御信号に従って、ダウンコンバート部102、復調部103−1〜103−n及び衛星取得情報生成部104等を制御し、SPS受信部150の電源のONまたはOFFの制御を行う。
【0028】
以上で、無線受信装置100の構成の説明を終える。
【0029】
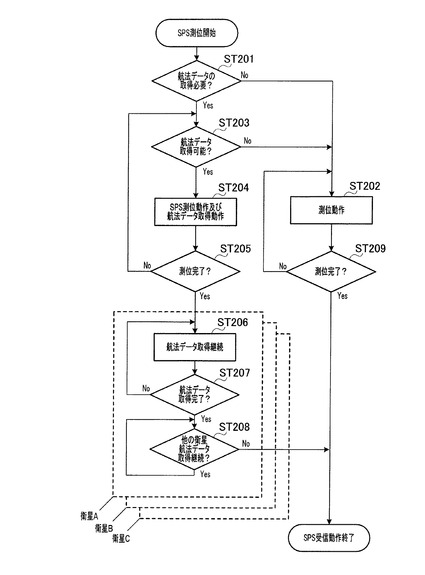
次に、無線受信装置100の動作について、図2を用いて説明する。図2は、無線受信装置100の動作を示すフロー図である。ここで、図2は、SPS信号をGPS信号とした際の航法データを取得する動作を説明するものである。また、図2は、間欠測位における1測位毎の動作を示すものである。
【0030】
航法データ取得判定部107は、測位開始とともに、航法データの有効期限までの残りの期間または航法データ保存後の経過時間に基づいて、航法データの取得が必要であるか否かを判定する(ステップST201)。
【0031】
航法データの取得が不要の場合には(ステップST201:No)、航法データ取得判定部107において航法データの取得が可能であるか否かを判定することなく、測位演算部105は測位動作を行う(ステップST202)。
【0032】
一方、航法データの取得が必要な場合には(ステップST201:Yes)、航法データ取得判定部107は、航法データの取得が可能であるか否かを判定する(ステップST203)。
【0033】
航法データの取得が不可能と判定した場合には(ステップST203:No)、航法データ取得判定部107において取得動作判定情報を出力することなく、測位演算部105は測位動作を行う(ステップST202)。
【0034】
一方、航法データの取得が可能と判定した場合には(ステップST203:Yes)、測位演算部105における測位動作とともに、SPS受信部150は、航法データの取得動作を行う(ステップST204)。
【0035】
次に、測位演算部105は、測位が完了したか否かを判定する(ステップST205)。
【0036】
測位が完了していない場合には(ステップST205:No)、無線受信装置100は、ステップST203〜ステップST205の処理を繰り返す。
【0037】
一方、測位が完了している場合には(ステップST205:Yes)、SPS受信部150は、航法データの取得を継続する(ステップST206)。航法データは、複数のSPS衛星分同時に取得することも可能であり、図2では、衛星A〜Cの3つのSPS衛星のSPS信号を同時に取得している。
【0038】
また、測位演算部105は、航法データの取得が完了したか否かを判定する(ステップST207)。
【0039】
完了していない場合には(ステップST207:No)、無線受信装置100は、ステップST206及びステップST207の処理を繰り返す。
【0040】
一方、完了している場合には(ステップST207:Yes)、測位演算部105は、航法データの取得を完了したSPS衛星以外の、他のSPS衛星の航法データの取得を継続するか否かを判定する(ステップST208)。
【0041】
継続する場合には(ステップST208:Yes)、測位演算部105は、ステップST208の処理を繰り返す。
【0042】
一方、継続しない場合には(ステップST208:No)、無線受信装置100は、SPS信号の受信動作を終了する。
【0043】
ステップST202に戻って、ステップST202の処理の次に、測位演算部105は、測位が完了したか否かを判定する(ステップST209)。
【0044】
測位が完了していない場合には(ステップST209:No)、無線受信装置100は、ステップST202の処理を繰り返す。
【0045】
一方、測位が完了している場合には(ステップST209:Yes)、無線受信装置100は、SPS信号の受信動作を終了する。
【0046】
なお、図2の各動作において、タイムアウト時間を設定し、タイムアウト時間内に測位または航法データの取得が完了できない場合に、動作を中断するようにしてもよい。
【0047】
以上で、無線受信装置100の動作の説明を終える。
【0048】
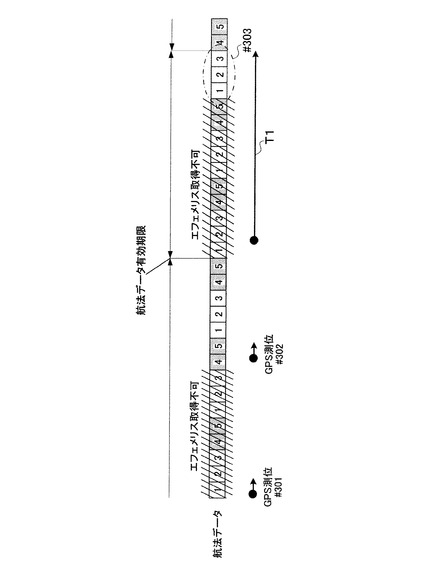
次に、SPS信号を受信する従来の無線受信装置と本実施の形態の無線受信装置との相違について、図3及び図4を用いて説明する。図3は、従来の測位時のSPS信号を示す図であり、図4は、本実施の形態の測位時のSPS信号を示す図である。ここで、図3及び図4において、SPS信号をGPS信号として説明する。
【0049】
図3及び図4において、横軸は時間である。また、図3及び図4において、デコードされるGPS信号は、フレーム1〜フレーム5の5つのフレームで構成される。また、測位演算に用いる航法データは、フレーム1〜フレーム3に格納され、繰り返し送信される。フレーム1からフレーム5までの時間は、例えば30秒である。また、図3及び図4において、斜線が記載されているフレームは、航法データが取得できないようなビル陰等の環境であることを示す。なお、航法データを取得できない場合であっても、疑似距離は取得可能である。
【0050】
図3より、従来の無線受信装置では、航法データ有効期限までは、航法データを取得できない環境においても、取得済みの航法データを用い、疑似距離のみを取得して測位できる。従って、従来の無線受信装置は、航法データ有効期限までは、繰り返し測位#301、#302を行うことができる。しかし、図3では、航法データ有効期限を越えた際、航法データの取得が不可能な環境であるため、航法データを取得することはできない。この場合、従来の無線受信装置は、航法データを取得できるまで継続してGPS信号の受信を行う。即ち、図3の期間T1において、GPS信号の受信を行う。
【0051】
図3では、時間帯#303において、航法データを取得することができ、測位が完了する。すなわち、図3の場合、1回の測位において、航法データを取得するまでに、デコード信号のフレーム1〜フレーム5の2周期分の時間と時間帯#303との合計時間(図3のT1)として、1分18秒程度かかることになる。また、測位動作中断までのタイムアウト時間を設定している場合、例えば、1分のタイムアウト時間を設定している場合には、図3において測位失敗となり測位結果を出力することができない。
【0052】
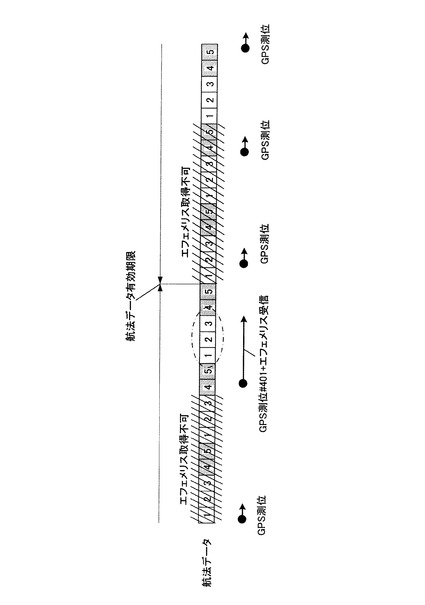
一方、図4より、本実施の形態の無線受信装置100では、2回目の測位#401、つまり航法データ有効期限よりも前で、かつ航法データの取得可能な測位#401の時に、測位自体は数秒で終わるにも関わらず、継続して航法データを取得する。即ち、本実施の形態では、航法データ有効期限よりも前であるにも関わらず、航法データの取得が可能な時に、航法データを取得する。そして、航法データの取得後にGPS信号の受信動作を完了する。測位終了後の航法データを取得するまでに約30秒必要である。その後は、期間T1において取得した航法データを用いて、数秒毎の測位を行う。
【0053】
このように、本実施の形態によれば、航法データ有効期限よりも前であるにも関わらず、航法データの取得が可能な時に、航法データを取得する。これにより、測位の時間を短縮することができ、測位成功確率を高めることができるとともに、消費電力を削減することができる。
【0054】
なお、本実施の形態において、航法データの有効期限までの残り期間、または航法データを保存してからの経過時間に基づいて、航法データの取得動作を継続する。しかし、本実施の形態においては、これら以外にも、SPS受信装置を駆動するバッテリーの残量に応じて、航法データの取得動作を継続するか否かを判断してもよい。例えば、航法データ取得判定部107は、航法データの取得が可能な場合において、バッテリーの残量が閾値以上である検出結果が入力した場合、航法データの取得動作を継続すると判断してもよい。これにより、バッテリーの減りを抑えることができる。また、本実施の形態において、間欠測位の時間長に応じて、航法データの取得動作を継続するか否かを判断する周期を制御してもよい。例えば、間欠測位の時間長が長い場合には、上記の判断の周期を早めてもよい。これにより、間欠測位の周期が長すぎることにより、航法データを取得できないリスクを回避し、利便性を高めることができる。
【0055】
また、図3及び図4に示したように、本実施の形態では、航法データは複数のデータフレームを用いて送信される。この際、本実施の形態において、SPS受信装置は、連続したフレームにより航法データを取得するようにしたが、本発明はこれに限らず、複数回の不連続なフレームに分けて、航法データを取得するようにしてもよい。この場合、SPS受信装置は、フレーム毎に航法データ保存部106に航法データを保存し、測位演算時には複数回に分けて、取得した航法データを使用する。複数回に分ける条件としては、各測位の時間短縮のために各測位で分担して取得して航法データを生成するようにしても良い。または、連続して取得している途中で環境等の変化により取得できなくなった場合に、一部だけ取得できたものを保持し、別の測位の際に補う部分を取得して航法データを生成するようにしてもよい。このように、航法データを分割して取得することにより、効率的に航法データを取得し、動作時間を減らして消費電力を削減することができる。
【0056】
また、図3及び図4に示したように、航法データは、衛星デコード信号(図3及び図4の場合にはフレーム1〜フレーム5)のうちの1部に格納されている(図3及び図4の場合にはフレーム1〜フレーム3)。従って、効率的に航法データを取得するために、測位動作中に航法データ部分の取得が開始できた場合(フレーム1の先頭から受信できた場合)には、測位完了後も航法データ取得を継続するようにしてもよい。さらに、航法データは図3及び図4に示すように周期的に送信され、航法データが送信されるタイミングは類推することができる。例えば、図3及び図4で示す航法データが含まれるフレーム1〜フレーム3の各フレームは、30秒毎に送信される。また、フレーム1の開始タイミングは30秒毎となる。従って、無線受信装置100は、一度航法データを取得すると、フレーム1の送信タイミングがわかる。具体的には、制御設定部109は、タイマ部108から出力されるカウント値に基づいて、以前の航法データの取得タイミングから、もしくは、SPS信号をデコードして取得される時刻情報から航法データの送信タイミングを推定することができる。そして、制御設定部109は、測位が休止している状態から受信部動作制御信号によりSPS受信部150をONにする。このSPS受信部150をONにするタイミングは、例えば、フレーム1が送信される数秒前にし、測位動作を継続することができる。これにより、航法データを効率的に取得することができる。このように航法データ送信の直前のタイミングに測位動作を継続する判定を行ってもよい。これらの動作によって衛星デコード信号の航法データ以外の部分を取得する時間を削減でき、無線受信装置100の動作時間を減らすことができ、消費電力を削減することができる。
【産業上の利用可能性】
【0057】
本発明にかかる無線受信装置及びデータ取得方法は、特に衛星からの信号を受信して測位を行うのに好適である。
【符号の説明】
【0058】
100 無線受信装置
101 アンテナ
102 ダウンコンバート部
103−1〜103−n 復調部
104 衛星取得情報生成部
105 測位演算部
106 航法データ保存部
107 航法データ取得判定部
108 タイマ部
109 制御設定部
110 受信制御部
150 SPS受信部
160 制御部
【技術分野】
【0001】
本発明は、特に衛星からの信号を受信して測位を行う無線受信装置及び航法データ取得方法に関する。
【背景技術】
【0002】
SPS(Satellite Positioning System)受信装置は、GPS(Global Positioning System)衛星などから送信される測位データを含む電波を受信して現在位置を検出する装置である。また、SPS受信装置は、車両の位置を報知するカーナビゲーション装置または位置検出機能を備える携帯電話等に用いられている。
【0003】
衛星から送信される測位データを含む信号(以下「SPS信号」と記載する)の受信には比較的大きな電流消費を伴う。従って、バッテリーで動作するSPS受信装置を長時間駆動させるためには、電流の消費を抑制する必要がある。そのため、従来、測位を間欠的に行うSPS受信装置が提案されている(例えば、特許文献1)。
【0004】
また、SPS受信装置は、SPS信号を受信することにより、疑似距離と航法データとを取得して測位を行う。また、航法データには有効期限が設けられているため、SPS受信装置は、測位を行うためには、航法データを度々取得する必要がある。
【0005】
しかしながら、SPS受信装置は、疑似距離の取得に比べて、航法データの取得は容易ではない。具体的には、GPS信号の場合、疑似距離の取得は、SPS信号が信号強度−160dBm程度でも可能であるのに対し、航法データ(エフェメリス)の取得は、−140dBm以上の信号強度が一般的に必要である。GPS信号を−160dBmで受信するには、ビルの陰、窓際または屋外でのカバンの中等でも可能である。一方、GPS信号を−140dBm以上で受信するには、SPS受信装置と衛星との間に妨げるものが無く、かつ見通しがよい場所で受信する必要がある。さらに、GPS信号は30秒周期で繰り返し送出され、航法データはその内の18秒程度のデータである。従って、航法データは、見通しの良い場所で18秒以上継続して受信する必要がある。例えば、GPS受信装置は、航法データの有効期限が切れた際に、ビルの陰または窓際等の航法データを取得することができない環境に位置する場合があり得る。この場合、SPS受信装置は、航法データを取得することができるまで、長時間動作する必要がある。また、SPS受信装置は、長時間動作した場合でも、航法データを取得できない場合には、疑似距離を取得することができても測位を行えないという問題がある。
【0006】
このような問題を解決する技術として、従来、航法データを取得後、一定の時間が経過した際、アラーム音を発生させ、使用者に対し、GPS信号が良好に受信できる環境で30秒連続して計測操作を行うように促すものが知られている(例えば、特許文献2)。
【先行技術文献】
【特許文献】
【0007】
【特許文献1】特開平4−370778号公報
【特許文献2】特開2008−241719号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
しかしながら、特許文献2においては、使用者が自発的に場所を移動し、30秒という長時間に渡り受信操作をすることは操作性が悪く、さらに受信操作を促したとしても、使用者が移動できない場合があり得る。また、使用者は、移動可能な場合であっても、SPS衛星との見通しが得られているか否かは分からない。従って、特許文献2においては、上記の特許文献1と同様の問題がある。
【0009】
本発明の目的は、測位の時間を短縮することができ、測位成功確率を高めることができるとともに、消費電力を削減することができる無線受信装置及び航法データ取得方法を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明の無線受信装置は、航法データを間欠的に含む測位信号を間欠受信する受信手段と、前記受信手段により受信した前記測位信号より前記航法データを取得して測位を行う測位演算手段と、前記測位演算手段において前記航法データの取得が可能である場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる制御手段と、を具備する構成を採る。
【0011】
本発明の航法データ取得方法は、無線受信装置における航法データ取得方法であって、航法データを間欠的に含む測位信号を間欠受信するステップと、受信した前記測位信号より前記航法データを取得して測位を行うステップと、前記航法データの取得が可能である場合に、前記航法データの取得が完了するまで前記測位信号の受信を継続するステップと、を具備するようにした。
【発明の効果】
【0012】
本発明によれば、測位の時間を短縮することができ、測位成功確率を高めることができるとともに、消費電力を削減することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の実施の形態に係る無線受信装置の構成を示すブロック図
【図2】本発明の実施の形態に係る無線受信装置の動作を示すフロー図
【図3】従来の測位時のSPS信号を示す図
【図4】本実施の形態の測位時のSPS信号を示す図
【発明を実施するための形態】
【0014】
以下、本発明の実施の形態について、図面を参照して詳細に説明する。
【0015】
(実施の形態)
図1は、本発明の実施の形態に係る無線受信装置100の構成を示すブロック図である。無線受信装置100は、例えばSPS受信装置である。
【0016】
無線受信装置100は、アンテナ101と、ダウンコンバート部102と、復調部103−1〜103−nと、衛星取得情報生成部104と、測位演算部105と、航法データ保存部106と、航法データ取得判定部107と、タイマ部108と、制御設定部109と、受信制御部110とから主に構成される。また、SPS受信部150は、ダウンコンバート部102と、復調部103−1〜103−nと、衛星取得情報生成部104と、受信制御部110とを含む。また、制御部160は、測位演算部105と、航法データ保存部106と、航法データ取得判定部107と、制御設定部109とを含む。以下に、各構成について、詳細に説明する。
【0017】
アンテナ101は、SPS衛星から送信されるSPS信号を受信してダウンコンバート部102へ出力する。
【0018】
ダウンコンバート部102は、アンテナ101から入力したSPS信号をダウンコンバートして、IF(Intermediate Frequency)信号に周波数変換する。そして、ダウンコンバート部102は、IF信号を復調部103−1〜103−nへ出力する。
【0019】
復調部103−1〜103−nは、受信制御部110の制御に従って、ダウンコンバート部102から入力したIF信号を復調して衛星取得情報生成部104へ出力する。復調部103−1〜103−nは、存在する衛星の数に対応してn(nは任意の自然数)個設けられている。また、SPS信号は、CDMA(Code Division Multiple Access)方式を用いて送信されるため、復調部103−1〜103−nは、各SPS衛星からの信号が有するCDMAコードにより、IF信号を逆拡散することによりデコードする。
【0020】
また、復調部103−1〜103−nは、複数のSPS衛星からのSPS信号を同時に受信する。また、復調部103−1〜103−nは、同一のSPS衛星からのSPS信号について、逆拡散時における位相及び周波数をシフトして、相関の高い位相及び周波数を見つけて逆拡散を行う。
【0021】
衛星取得情報生成部104は、n個の復調部103−1〜103−nから入力した信号に基づいて、各SPS衛星のSPS衛星取得情報を生成する。そして、衛星取得情報生成部104は、生成したSPS衛星取得情報を測位演算部105へ出力する。ここで、衛星取得情報とは、疑似距離、衛星デコード信号及び信号品質情報である。また、衛星デコード信号は、アルマナック、航法データ及び時刻情報等を含む。また、疑似距離とは、逆拡散時の位相及び周波数の条件から得られる各SPS衛星と無線受信装置100との間の距離である。
【0022】
測位演算部105は、衛星取得情報生成部104から入力した衛星デコード信号から航法データを取得する。また、測位演算部105は、取得した航法データを航法データ保存部106に保存する。また、測位演算部105は、取得した航法データまたは航法データ保存部106に保存されている航法データと、衛星取得情報生成部104から入力した疑似距離を用いて測位演算を行い、無線受信装置100の位置情報を生成する。そして、測位演算部105は、生成した位置情報を外部へ出力する。また、測位演算部105は、SPS信号から航法データが取得されているか否かの判定、または衛星取得情報生成部104から取得した各SPS衛星のSPS信号の受信品質の良否より、航法データ受信可否判定情報を生成して航法データ取得判定部107へ出力する。この際、測位演算部105は、例えば、SNRが規定値以上であるか否かによりSPS信号の受信品質の良否を判断する。そして、測位演算部105は、SNRが規定値以上であればSPS信号の受信品質は良好である航法データ受信可否判定情報を生成する。または、測位演算部105は、SPS信号から航法データが取得されていると判定した場合に、航法データが取得されている航法データ受信可否判定情報を生成する。また、測位演算部105は、測位演算の経過状況を示す演算経過情報を制御設定部109へ出力する。また、測位演算部105は、測位演算により、SPS信号を送出する衛星の設定情報を取得し、取得した衛星の設定情報を制御設定部109へ出力する。ここで、衛星の設定情報は、サーチする衛星番号及び衛星ドップラー信号等を含む。
【0023】
航法データ保存部106は、測位演算部105から入力した航法データを保存する。また、航法データ保存部106は、航法データを保存してからの経過時間を計測する。
【0024】
航法データ取得判定部107は、航法データ内に記載されている有効期限情報を、航法データ保存部106に保存されている航法データから取得する。または、航法データ取得判定部107は、航法データ保存部106が航法データを保存してからの経過時間情報を、航法データ保存部106から取得する。また、航法データ取得判定部107は、測位演算部105から航法データ受信可否判定情報を取得する。また、航法データ取得判定部107は、有効期限情報または経過時間情報と、航法データ受信可否判定情報とに基づいて、GPS測位後も航法データの取得が完了するまで継続してSPS受信部150を動作させるか否かを判定する。例えば、航法データ取得判定部107は、航法データの有効期限の残りが2時間未満になった場合において、受信品質は良好である航法データ受信可否判定情報を得た場合、測位完了後も航法データの取得が完了するまで継続してSPS信号を受信すると判定する。または、航法データ取得判定部107は、航法データの有効期限の残りが2時間未満になった場合において、航法データが取得されている航法データ受信可否判定情報を得た場合、測位完了後も航法データの取得が完了するまで継続してSPS信号を受信すると判定する。または、航法データ取得判定部107は、航法データを取得してからの経過時間が2時間以上の場合において、航法データの受信が可能である航法データ受信可否判定情報を得た場合、測位完了後も航法データの取得が完了するまで継続してSPS信号を受信すると判定する。または、航法データ取得判定部107は、航法データを取得してからの経過時間が2時間以上の場合において、受信品質は良好である航法データ受信可否判定情報を得た場合、測位完了後も航法データの取得が完了するまで継続してSPS信号を受信すると判定する。そして、航法データ取得判定部107は、上記の判定結果である航法データ取得動作判定情報を制御設定部109へ出力する。
【0025】
タイマ部108は、所定のタイマ周期でカウントを行う。
【0026】
制御設定部109は、タイマ部108におけるカウント値に基づいて、間欠的に測位を行うように受信制御部110を制御する。また、制御設定部109は、航法データ取得判定部107から入力した航法データ取得動作判定情報に基づいて、SPS受信部150を動作させるための受信部動作制御信号を受信制御部110へ出力する。具体的には、制御設定部109は、航法データ取得判定部107から入力した航法データ取得動作判定情報が、航法データを取得する判定である場合には、測位演算部105における測位演算が完了し、測位が完了した後もSPS受信部150において継続して航法データを取得する動作を行うように、受信部動作制御信号により受信制御部110を制御する。また、制御設定部109は、航法データ取得判定部107から入力した航法データ受信可否判定情報が、航法データの取得を完了したことを通知する場合には、SPS受信部150の動作を終了させるように、受信部動作制御信号により受信制御部110を制御する。また、制御設定部109は、測位と航法データの取得のいずれも完了せずに一定期間経過した場合には、SPS受信部150の動作を終了させるように、受信部動作制御信号により受信制御部110を制御する。ここで、受信部動作制御信号は、ONまたはOFF等の動作制御、SPS衛星をサーチするための周波数等のサーチ動作情報を含む。また、制御設定部109は、測位演算部105から入力した演算経過情報の測位演算の経過状況に応じて、測位動作の開始または終了の設定を行う。また、制御設定部109は、測位演算部105から入力したSPS信号を送出する衛星の設定情報に基づいて、各復調部103−1〜103−nが動作するパラメータを受信制御部110へ出力する。ここで、各復調部103−1〜103−nが動作するパラメータとは、周波数、位相及びPRN(pseudo-random number、疑似ランダム信号をデコードするための符号)コードである。
【0027】
受信制御部110は、制御設定部109から入力した受信部動作制御信号に従って、ダウンコンバート部102、復調部103−1〜103−n及び衛星取得情報生成部104等を制御し、SPS受信部150の電源のONまたはOFFの制御を行う。
【0028】
以上で、無線受信装置100の構成の説明を終える。
【0029】
次に、無線受信装置100の動作について、図2を用いて説明する。図2は、無線受信装置100の動作を示すフロー図である。ここで、図2は、SPS信号をGPS信号とした際の航法データを取得する動作を説明するものである。また、図2は、間欠測位における1測位毎の動作を示すものである。
【0030】
航法データ取得判定部107は、測位開始とともに、航法データの有効期限までの残りの期間または航法データ保存後の経過時間に基づいて、航法データの取得が必要であるか否かを判定する(ステップST201)。
【0031】
航法データの取得が不要の場合には(ステップST201:No)、航法データ取得判定部107において航法データの取得が可能であるか否かを判定することなく、測位演算部105は測位動作を行う(ステップST202)。
【0032】
一方、航法データの取得が必要な場合には(ステップST201:Yes)、航法データ取得判定部107は、航法データの取得が可能であるか否かを判定する(ステップST203)。
【0033】
航法データの取得が不可能と判定した場合には(ステップST203:No)、航法データ取得判定部107において取得動作判定情報を出力することなく、測位演算部105は測位動作を行う(ステップST202)。
【0034】
一方、航法データの取得が可能と判定した場合には(ステップST203:Yes)、測位演算部105における測位動作とともに、SPS受信部150は、航法データの取得動作を行う(ステップST204)。
【0035】
次に、測位演算部105は、測位が完了したか否かを判定する(ステップST205)。
【0036】
測位が完了していない場合には(ステップST205:No)、無線受信装置100は、ステップST203〜ステップST205の処理を繰り返す。
【0037】
一方、測位が完了している場合には(ステップST205:Yes)、SPS受信部150は、航法データの取得を継続する(ステップST206)。航法データは、複数のSPS衛星分同時に取得することも可能であり、図2では、衛星A〜Cの3つのSPS衛星のSPS信号を同時に取得している。
【0038】
また、測位演算部105は、航法データの取得が完了したか否かを判定する(ステップST207)。
【0039】
完了していない場合には(ステップST207:No)、無線受信装置100は、ステップST206及びステップST207の処理を繰り返す。
【0040】
一方、完了している場合には(ステップST207:Yes)、測位演算部105は、航法データの取得を完了したSPS衛星以外の、他のSPS衛星の航法データの取得を継続するか否かを判定する(ステップST208)。
【0041】
継続する場合には(ステップST208:Yes)、測位演算部105は、ステップST208の処理を繰り返す。
【0042】
一方、継続しない場合には(ステップST208:No)、無線受信装置100は、SPS信号の受信動作を終了する。
【0043】
ステップST202に戻って、ステップST202の処理の次に、測位演算部105は、測位が完了したか否かを判定する(ステップST209)。
【0044】
測位が完了していない場合には(ステップST209:No)、無線受信装置100は、ステップST202の処理を繰り返す。
【0045】
一方、測位が完了している場合には(ステップST209:Yes)、無線受信装置100は、SPS信号の受信動作を終了する。
【0046】
なお、図2の各動作において、タイムアウト時間を設定し、タイムアウト時間内に測位または航法データの取得が完了できない場合に、動作を中断するようにしてもよい。
【0047】
以上で、無線受信装置100の動作の説明を終える。
【0048】
次に、SPS信号を受信する従来の無線受信装置と本実施の形態の無線受信装置との相違について、図3及び図4を用いて説明する。図3は、従来の測位時のSPS信号を示す図であり、図4は、本実施の形態の測位時のSPS信号を示す図である。ここで、図3及び図4において、SPS信号をGPS信号として説明する。
【0049】
図3及び図4において、横軸は時間である。また、図3及び図4において、デコードされるGPS信号は、フレーム1〜フレーム5の5つのフレームで構成される。また、測位演算に用いる航法データは、フレーム1〜フレーム3に格納され、繰り返し送信される。フレーム1からフレーム5までの時間は、例えば30秒である。また、図3及び図4において、斜線が記載されているフレームは、航法データが取得できないようなビル陰等の環境であることを示す。なお、航法データを取得できない場合であっても、疑似距離は取得可能である。
【0050】
図3より、従来の無線受信装置では、航法データ有効期限までは、航法データを取得できない環境においても、取得済みの航法データを用い、疑似距離のみを取得して測位できる。従って、従来の無線受信装置は、航法データ有効期限までは、繰り返し測位#301、#302を行うことができる。しかし、図3では、航法データ有効期限を越えた際、航法データの取得が不可能な環境であるため、航法データを取得することはできない。この場合、従来の無線受信装置は、航法データを取得できるまで継続してGPS信号の受信を行う。即ち、図3の期間T1において、GPS信号の受信を行う。
【0051】
図3では、時間帯#303において、航法データを取得することができ、測位が完了する。すなわち、図3の場合、1回の測位において、航法データを取得するまでに、デコード信号のフレーム1〜フレーム5の2周期分の時間と時間帯#303との合計時間(図3のT1)として、1分18秒程度かかることになる。また、測位動作中断までのタイムアウト時間を設定している場合、例えば、1分のタイムアウト時間を設定している場合には、図3において測位失敗となり測位結果を出力することができない。
【0052】
一方、図4より、本実施の形態の無線受信装置100では、2回目の測位#401、つまり航法データ有効期限よりも前で、かつ航法データの取得可能な測位#401の時に、測位自体は数秒で終わるにも関わらず、継続して航法データを取得する。即ち、本実施の形態では、航法データ有効期限よりも前であるにも関わらず、航法データの取得が可能な時に、航法データを取得する。そして、航法データの取得後にGPS信号の受信動作を完了する。測位終了後の航法データを取得するまでに約30秒必要である。その後は、期間T1において取得した航法データを用いて、数秒毎の測位を行う。
【0053】
このように、本実施の形態によれば、航法データ有効期限よりも前であるにも関わらず、航法データの取得が可能な時に、航法データを取得する。これにより、測位の時間を短縮することができ、測位成功確率を高めることができるとともに、消費電力を削減することができる。
【0054】
なお、本実施の形態において、航法データの有効期限までの残り期間、または航法データを保存してからの経過時間に基づいて、航法データの取得動作を継続する。しかし、本実施の形態においては、これら以外にも、SPS受信装置を駆動するバッテリーの残量に応じて、航法データの取得動作を継続するか否かを判断してもよい。例えば、航法データ取得判定部107は、航法データの取得が可能な場合において、バッテリーの残量が閾値以上である検出結果が入力した場合、航法データの取得動作を継続すると判断してもよい。これにより、バッテリーの減りを抑えることができる。また、本実施の形態において、間欠測位の時間長に応じて、航法データの取得動作を継続するか否かを判断する周期を制御してもよい。例えば、間欠測位の時間長が長い場合には、上記の判断の周期を早めてもよい。これにより、間欠測位の周期が長すぎることにより、航法データを取得できないリスクを回避し、利便性を高めることができる。
【0055】
また、図3及び図4に示したように、本実施の形態では、航法データは複数のデータフレームを用いて送信される。この際、本実施の形態において、SPS受信装置は、連続したフレームにより航法データを取得するようにしたが、本発明はこれに限らず、複数回の不連続なフレームに分けて、航法データを取得するようにしてもよい。この場合、SPS受信装置は、フレーム毎に航法データ保存部106に航法データを保存し、測位演算時には複数回に分けて、取得した航法データを使用する。複数回に分ける条件としては、各測位の時間短縮のために各測位で分担して取得して航法データを生成するようにしても良い。または、連続して取得している途中で環境等の変化により取得できなくなった場合に、一部だけ取得できたものを保持し、別の測位の際に補う部分を取得して航法データを生成するようにしてもよい。このように、航法データを分割して取得することにより、効率的に航法データを取得し、動作時間を減らして消費電力を削減することができる。
【0056】
また、図3及び図4に示したように、航法データは、衛星デコード信号(図3及び図4の場合にはフレーム1〜フレーム5)のうちの1部に格納されている(図3及び図4の場合にはフレーム1〜フレーム3)。従って、効率的に航法データを取得するために、測位動作中に航法データ部分の取得が開始できた場合(フレーム1の先頭から受信できた場合)には、測位完了後も航法データ取得を継続するようにしてもよい。さらに、航法データは図3及び図4に示すように周期的に送信され、航法データが送信されるタイミングは類推することができる。例えば、図3及び図4で示す航法データが含まれるフレーム1〜フレーム3の各フレームは、30秒毎に送信される。また、フレーム1の開始タイミングは30秒毎となる。従って、無線受信装置100は、一度航法データを取得すると、フレーム1の送信タイミングがわかる。具体的には、制御設定部109は、タイマ部108から出力されるカウント値に基づいて、以前の航法データの取得タイミングから、もしくは、SPS信号をデコードして取得される時刻情報から航法データの送信タイミングを推定することができる。そして、制御設定部109は、測位が休止している状態から受信部動作制御信号によりSPS受信部150をONにする。このSPS受信部150をONにするタイミングは、例えば、フレーム1が送信される数秒前にし、測位動作を継続することができる。これにより、航法データを効率的に取得することができる。このように航法データ送信の直前のタイミングに測位動作を継続する判定を行ってもよい。これらの動作によって衛星デコード信号の航法データ以外の部分を取得する時間を削減でき、無線受信装置100の動作時間を減らすことができ、消費電力を削減することができる。
【産業上の利用可能性】
【0057】
本発明にかかる無線受信装置及びデータ取得方法は、特に衛星からの信号を受信して測位を行うのに好適である。
【符号の説明】
【0058】
100 無線受信装置
101 アンテナ
102 ダウンコンバート部
103−1〜103−n 復調部
104 衛星取得情報生成部
105 測位演算部
106 航法データ保存部
107 航法データ取得判定部
108 タイマ部
109 制御設定部
110 受信制御部
150 SPS受信部
160 制御部
【特許請求の範囲】
【請求項1】
航法データを間欠的に含む測位信号を間欠受信する受信手段と、
前記受信手段により受信した前記測位信号より前記航法データを取得して測位を行う測位演算手段と、
前記測位演算手段において前記航法データの取得が可能である場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる制御手段と、
を具備する無線受信装置。
【請求項2】
前記受信手段により受信した前記測位信号の受信品質を取得する取得手段をさらに具備し、
前記制御手段は、前記受信品質が閾値以上である場合に前記航法データの取得が可能であると判定し、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1記載の無線受信装置。
【請求項3】
前記制御手段は、前記測位演算手段により前記航法データの取得が可能である場合において、前記測位演算手段により取得した前記航法データの有効期限までの残り期間が閾値未満の場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1または請求項2記載の無線受信装置。
【請求項4】
前記測位演算手段により取得した前記航法データを保存する保存手段をさらに具備し、
前記制御手段は、前記測位演算手段により前記航法データの取得が可能である場合において、前記保存手段に前記航法データを保存してからの経過時間が閾値以上の場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1から請求項3のいずれかに記載の無線受信装置。
【請求項5】
前記受信手段に電源を供給する電源供給手段をさらに具備し、
前記制御手段は、前記測位演算手段により前記航法データの取得が可能である場合において、前記電源の残量が閾値以上の場合に、前記航法データの取得が完了するまで前記受信手段における前記航法データの受信を継続させる請求項1から請求項4のいずれかに記載の無線受信装置。
【請求項6】
前記制御手段は、前記測位演算手段における前記航法データの取得が完了するまでの連続した所定期間において、前記受信手段における前記測位信号の受信を継続させる請求項1から請求項5のいずれかに記載の無線受信装置。
【請求項7】
前記制御手段は、前記測位演算手段における前記航法データの取得が完了するまでの複数の不連続の所定期間において、前記受信手段における前記測位信号の受信を継続させる請求項1から請求項6のいずれかに記載の無線受信装置。
【請求項8】
前記測位演算手段は、複数フレームを有する測位信号の一部の連続するフレームに含まれる前記航法データを取得し、
前記制御手段は、前記測位演算手段により前記一部のフレームの先頭フレームを取得した場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1から請求項7のいずれかに記載の無線受信装置。
【請求項9】
前記制御手段は、前記受信手段における前記航法データの送信タイミングを推定し、推定した前記送信タイミングの所定時間前において、前記航法データの取得が可能であると判定し、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1から請求項8のいずれかに記載の無線受信装置。
【請求項10】
前記受信手段は、前記航法データであるエフェメリスを間欠的に含むGPS信号を前記測位信号として間欠受信する請求項1から請求項9のいずれかに記載の無線受信装置。
【請求項11】
無線受信装置における航法データ取得方法であって、
航法データを間欠的に含む測位信号を間欠受信するステップと、
受信した前記測位信号より前記航法データを取得して測位を行うステップと、
前記航法データの取得が可能である場合に、前記航法データの取得が完了するまで前記測位信号の受信を継続するステップと、
を具備する航法データ取得方法。
【請求項1】
航法データを間欠的に含む測位信号を間欠受信する受信手段と、
前記受信手段により受信した前記測位信号より前記航法データを取得して測位を行う測位演算手段と、
前記測位演算手段において前記航法データの取得が可能である場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる制御手段と、
を具備する無線受信装置。
【請求項2】
前記受信手段により受信した前記測位信号の受信品質を取得する取得手段をさらに具備し、
前記制御手段は、前記受信品質が閾値以上である場合に前記航法データの取得が可能であると判定し、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1記載の無線受信装置。
【請求項3】
前記制御手段は、前記測位演算手段により前記航法データの取得が可能である場合において、前記測位演算手段により取得した前記航法データの有効期限までの残り期間が閾値未満の場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1または請求項2記載の無線受信装置。
【請求項4】
前記測位演算手段により取得した前記航法データを保存する保存手段をさらに具備し、
前記制御手段は、前記測位演算手段により前記航法データの取得が可能である場合において、前記保存手段に前記航法データを保存してからの経過時間が閾値以上の場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1から請求項3のいずれかに記載の無線受信装置。
【請求項5】
前記受信手段に電源を供給する電源供給手段をさらに具備し、
前記制御手段は、前記測位演算手段により前記航法データの取得が可能である場合において、前記電源の残量が閾値以上の場合に、前記航法データの取得が完了するまで前記受信手段における前記航法データの受信を継続させる請求項1から請求項4のいずれかに記載の無線受信装置。
【請求項6】
前記制御手段は、前記測位演算手段における前記航法データの取得が完了するまでの連続した所定期間において、前記受信手段における前記測位信号の受信を継続させる請求項1から請求項5のいずれかに記載の無線受信装置。
【請求項7】
前記制御手段は、前記測位演算手段における前記航法データの取得が完了するまでの複数の不連続の所定期間において、前記受信手段における前記測位信号の受信を継続させる請求項1から請求項6のいずれかに記載の無線受信装置。
【請求項8】
前記測位演算手段は、複数フレームを有する測位信号の一部の連続するフレームに含まれる前記航法データを取得し、
前記制御手段は、前記測位演算手段により前記一部のフレームの先頭フレームを取得した場合に、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1から請求項7のいずれかに記載の無線受信装置。
【請求項9】
前記制御手段は、前記受信手段における前記航法データの送信タイミングを推定し、推定した前記送信タイミングの所定時間前において、前記航法データの取得が可能であると判定し、前記航法データの取得が完了するまで前記受信手段における前記測位信号の受信を継続させる請求項1から請求項8のいずれかに記載の無線受信装置。
【請求項10】
前記受信手段は、前記航法データであるエフェメリスを間欠的に含むGPS信号を前記測位信号として間欠受信する請求項1から請求項9のいずれかに記載の無線受信装置。
【請求項11】
無線受信装置における航法データ取得方法であって、
航法データを間欠的に含む測位信号を間欠受信するステップと、
受信した前記測位信号より前記航法データを取得して測位を行うステップと、
前記航法データの取得が可能である場合に、前記航法データの取得が完了するまで前記測位信号の受信を継続するステップと、
を具備する航法データ取得方法。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2011−137711(P2011−137711A)
【公開日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願番号】特願2009−297768(P2009−297768)
【出願日】平成21年12月28日(2009.12.28)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成23年7月14日(2011.7.14)
【国際特許分類】
【出願日】平成21年12月28日(2009.12.28)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]