
無線周波数近接センサ及びセンサ・システム
【課題】車両の死角における物体検知を行い、他の検知システムと干渉しない、近接センサを提供する。
【解決手段】周波数が異なる複数の無線周波数(RF)信号を送信し、反射したRF信号を受信し、中間周波数(IF)信号を送るように、構成される。各IF信号は反射RF信号の1つを代表し、各反射RF信号はセンサの検出領域内の物体によって反射された送信RF信号に対応する。センサは、IF信号を用いて、物体がその検出領域内にあるかどうか及びその移動方向を決定する。
【解決手段】周波数が異なる複数の無線周波数(RF)信号を送信し、反射したRF信号を受信し、中間周波数(IF)信号を送るように、構成される。各IF信号は反射RF信号の1つを代表し、各反射RF信号はセンサの検出領域内の物体によって反射された送信RF信号に対応する。センサは、IF信号を用いて、物体がその検出領域内にあるかどうか及びその移動方向を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本出願は、2007年9月14日に出願の米国仮出願 第60/972,485号の利益を主張する。[0002]本発明は、全般的に近接センサ(proximity sensor)に関し、より詳細には、車両の死角(vehicle blind spot)における物体の検知に用いることができる無線周波数(RF:radio frequency)近接センサに関する。
【背景技術】
【0002】
[0003]多くの自走車両は、車両の近くにあるかも知れない物体が車両運転者にとって見づらいと思われる、車両周囲の領域があるように製造される。これらの領域は典型的には“死角”といわれている。車両の死角の特定の位置は、例えば、車両モデルや車両運転者により異なるであろう。しかし、典型的な車両の死角位置としては、車両の後部方向に広がる車両運転者の左右や車両の後部の領域が挙げられる。特定の車両の死角の特定の位置や大きさがどうであろうと、死角は車両の死角にある物体に車両が侵入する可能性を増大させる。
【0003】
[0004]車両の死角の大きさを縮小させるかあるいは車両の死角における物体を検出する能力を増強する各種の解決策が、提案されてきた。1つの解決策には、車両の様々な位置に配置された凹面鏡等の様々な形をした鏡を車両に備えることがある。別の解決策としては、車両に1台以上のカメラを取り付けることがある。
【0004】
1台以上のカメラは、車両の死角における障害物の視覚映像を車両運転者に提供する。提案された更に別の解決策では、車両に搭載のレーダ検出システムを用いて、車両の死角における障害物を検出し、警告信号等の情報を車両運転者に提供する。かかるシステムの1つでは、周波数が異なる2つの信号間の相対位相シフトを用いて、車両の死角における物体の存在及び物体までの距離を検出する。
【発明の開示】
【発明が解決しようとする課題】
【0005】
[0005]運転者が車両の死角内の物体を見付ける又は検出するのを支援している時には一般に有用であるが、上述の各解決策には幾つかの欠点がある。例えば、鏡は夜間に又は悪天候下で有効性の低下を示すことがある。カメラに基づくシステムは、ビデオ・カメラ及びビデオ・モニターの使用に依存すると、比較的複雑かつ高価になる可能性がある。しかも、ビデオ・モニターは、気が散ることがあり、又は、車両運転者にとって読み取るのが難しいと思われる比較的複雑な映像を示すことがあって、このようなモニターは気が散ることがある。更に、カメラに基づくシステムも、夜間に又は悪天候下で有効性の低下を示すことがある。従来技術を利用するレーダに基づくシステムは、比較的複雑かつ高価になる可能性がある。加えて、上述のレーダに基づく位相検出システムは、180°以上の位相差ではアンビギュイティ(ambiguity;あいまいさ)を示し、他の車両に搭載したレーダに基づくシステムによって互いに干渉することがあり、これにより有効性及び信頼性が低下する。
【0006】
[0006]従って、夜間に又は悪天候下で十分な有効性を示し、比較的簡単且つ安価であり、アンビギュイティを示さない又は他の検出システムと干渉しない、車両の死角検出器を求める要請がある。本発明はこれらの要請の1以上に応えるものである。
【課題を解決するための手段】
【0007】
[0007]一実施の形態において、また、単に一例として、車両の死角検知システムは、車両に搭載された複数の死角検出器とプロセッサとを含む。各死角検出器には車両周囲の検出領域があり、各死角検出器は、周波数が異なる3種以上の無線周波数(RF:radio frequency)信号を送信し、反射したRF信号を受信し、中間周波数(IF;intermediate frequency)信号を送るよう作動する。各IF信号は反射RF信号の1つを代表し、各反射RF信号は検出領域内に存在する移動中の物体によって反射された送信RF信号に対応する。プロセッサは、少なくとも1つの死角検出器から送られるIF信号を受信するように接続されると共に、IF信号を受信すると、移動中の物体が少なくとも1つの死角検出器の検出領域内にあるかどうかを決定するよう作動する。
【0008】
[0008]別の典型的な実施の形態において、近接センサは、電波即ち無線周波数(RF)センサと、パルス発生器と、複数の検出チャンネルと、プロセッサとを含む。RFセンサは、周波数制御信号を受信するように接続されると共に、その信号に応答して、周波数が異なる複数のRF信号を発生及び送信するよう作動する。RFセンサは、更に、反射したRF信号を受信し、かつ中間周波(IF)信号を送るよう作動する。各IF信号は反射RF信号の1つを代表し、各反射RF信号はある方向に移動しつつある物体によって反射された送信RF信号に対応する。パルス発生器は、RFセンサに接続されると共に、RFセンサに周波数制御信号を送るよう作動する。各検出チャンネルは、RFセンサから送られるIF信号の1つを受信するように接続されると共に、IF信号を代表するデジタル信号を送るよう作動する。プロセッサは、それぞれの検出チャンネルから送られるデジタル信号を受信するように接続されると共に、その信号を受信すると、送信RF信号を反射した移動中の物体までの距離と物体の方向を決定するよう作動する。
【0009】
[0009]更に別の典型的な実施の形態において、ある移動方向に移動しつつある物体の存在及び物体までの距離を検出する方法は、周波数が異なる3種以上の無線周波数(RF)信号の送信を含む。移動中の物体によって反射された送信RF信号に対応する反射RF信号が受信される。2組以上の反射RF信号間の相対位相角(relative phase angles)が決定され、決定された相対位相角から物体までの距離と物体の移動方向が決定される。
【発明を実施するための最良の形態】
【0010】
[0010]以下に、同様の構成要素には同一の番号を付して、添付の図面と共に本発明を説明する。[0019]以下の詳細な説明は、本来単なる例示にすぎず、本発明を限定したり本発明の適用及び使用を制限しようとするものではない。更に、前記背景技術又は以下の詳細な説明に提示されるいかなる理論により、本発明が何ら束縛されるものではない。この点に関して、本発明のセンサの実施例は自動車の死角検出システムで実施されるように説明されているが、当然のことながら、センサは数多くの他のシステムや環境で実施されてもよい。例えば、居住、商業、政府もしくは軍事用建物又は施設付近の物体の存在を検出するために、センサを使用することができる。更に、本明細書で用いられるように、用語“物体(object)”又は“複数の物体(objects)”は、生命のある物及び無生物の双方に当てはめても差し支えない。
【0011】
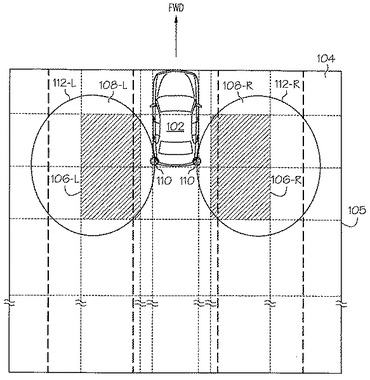
[0020]さて図1を参照すると、典型的な車両102が走行面104に示される。図1には様々な領域も図解されている。これらの領域としては、複数の運転者警告領域106(例えば、106-L,106-R)、複数の懸念のある運転者警告領域108(例えば、108-L,108-R)、及び複数の検出領域112(例えば、112-L,112-R)が挙げられる。運転者警告領域106は、領域106-L,106-R内のいずれかで移動中の物体が検出されると、車両運転者に警告を発することが望ましい領域を示す。懸念のある運転者警告領域108は、領域108-L,108-R内のいずれかで移動中の物体が検出されると、そのように望むならば、車両運転者に警告を発することができる領域を示す。検出領域112は、車両の死角検出器110の検出能力を示す。図示の実施例では、車両102は、検出領域112内の物体を検出する複数の死角検出器110を含む。より詳細には、車両102は、左側の死角検出器110-Lと右側の死角検出器110-Rを装備することが好ましい。一側につき1つの死角検出器110が図示されているが、当然のことながら、車両102は、複数の左側及び右側死角検出器108-L,108-Rを装備することもあり得る。
【0012】
[0021]更に先に進む前に、懸念のある運転者警告領域108は、図1に図示されたものより大きくても小さくてもよいことが指摘される。実際、一部の実施の形態では、警告領域は図1の境界線105まで広がることがあり得る。勿論、懸念のある警告領域108の広がりは検出領域112の広がりにより制限され、後者の広がりはやはり車両の死角検出器110の検出範囲により制限され、その実施の形態を後に説明する。
【0013】
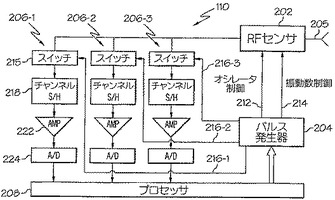
[0022]次に図2を見ると、死角検出器110の典型的な一実施例の機能的ブロック図が示されている。図示の死角検出器110は、無線周波数(RF)近接センサであり、RFセンサ202、パルス発生器204、複数の検出チャンネル206(例えば、206-1,206-2,206-3 )、及びプロセッサ208を含む。死角検出器/RF近接センサ110についてより詳細に説明する前に、センサ110は自動車死角検出システムとの関連において説明されるが、数多くの広範なシステム及び環境で、そして数多くの広範な機能を目指して、センサを使用できることがもう一度指摘される。
【0014】
[0023]RFセンサ202は、無線周波数(RF)信号を送信し、1以上のアンテナ205を介して、その検出領域112内の移動中の物体によって反射されたRF信号を受信するように、構成される。様々な周波数のRF信号を送信及び受信するように、RFセンサ202を構成することができる。しかし、マイクロ波周波数スペクトルに見られるRFの周波数を送受信するように、RFセンサ202を構成することが好ましい。また、RFセンサ202は、好ましくは、多周波RF信号を送受信するように構成される。即ち、RFセンサ202は同一周波数のRF信号を送受信するだけではない。むしろ、RFセンサ202はドップラー情報を含む周波数の異なるRF信号を送受信する。RFセンサ202は、反射したRF信号を受信すると、送信されて反射したRF信号を結合して、周波数が異なるドップラーIF(intermediate frequency)信号を発生し、これを検出チャンネル206に送る。図示の実施例では、RFセンサ202は、3種の異なる周波数(F1,F2,F3)のRF信号を送受信するように構成されている。この理由については後に更に論じる。当然のことながら、異なる周波数が上記の数より多いRF信号を送受信するように、RFセンサ202を構成することもあり得る。しかし、異なる周波数の数は検出チャンネル206の数と等しいことが好ましい。
【0015】
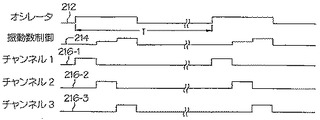
[0024]RFセンサ202が送受信する信号のRFの周波数は、少なくとも一部がパルス発生器204によって制御される。パルス発生器204は、RFセンサ202に接続しおり、複数の制御信号をRFセンサ202に送る。制御信号は、RF信号を発生するRFセンサ202内の図示していないオシレータ(以下に説明する)の作動及び振動数を制御する。このように、図示の実施例では、制御信号はオシレータ制御信号212と振動数制御信号214とを含む。オシレータ制御信号212はRFセンサのオシレータをオン・オフに切り替え、振動数制御信号214はオシレータの振動数を制御する。また、パルス発生器204は、チャンネル・イネーブル信号216(例えば、216-1,216-2,216-3 )をそれぞれの検出チャンネル206に送る。チャンネル・イネーブル信号216は、検出チャンネル206を選択的に有効及び無効にする。
【0016】
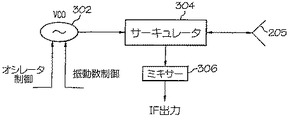
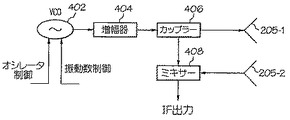
[0025]検出チャンネル206について説明する前に、数多くの好適なディバイス及び回路構成のいずれか1つを用いて、RFセンサ202を実装できることが指摘される。図3に示すある特定の回路構成では、電圧制御オシレータ(VCO)302、サーキュレータ304、及びミキサー306を含む。図4に示す更に別の典型的な構成では、VCO402、光増幅器404、カップラー406、及びミキサー408を含む。図3の構成ではRFセンサ202は1つのアンテナ205しか含んでいないが、一方、図4の構成ではRFセンサ202は2つのアンテナ−−送信アンテナ205-1と受信アンテナ205-2とを含んでいる、ことが分かるであろう。
【0017】
[0026]検出チャンネル206は各々、RFセンサ202から送られるIF信号を処理するように構成されている。より詳しくは、各検出チャンネル206は、異なるRFの周波数に対応する信号のドップラーIF信号を処理するように構成されている。このように、死角検出器110は3つの検出チャンネル206-1,206-2,206-3 を含む。しかし、当然のことながら、RFセンサ202及びパルス発生器204が、4種以上の異なるRFの周波数の送受信を可能にするように構成されるならば、死角検出器110は上記の数より多い検出チャンネル206を含むこともあり得る。いずれの場合も、各検出チャンネル206は、スイッチ回路215、サンプルホールド(S/H)回路218、増幅回路222、及びアナログ・デジタル変換(A/D)回路224を含む。スイッチ回路215はパルス発生器204から送られるチャンネル・イネーブル信号216に応答して、適切なRFの周波数に対応するIF信号をS/H回路218に選択的に送る。
【0018】
[0027]S/H回路218は、スイッチ回路215から選択的に送られたIF信号を受信し、公知の機能性を実現しながら、標本化IF信号を増幅回路222に送る。増幅回路222は、標本化IF信号の好適な信号処理を行って、調整された標本化IF信号をA/D回路224に送るように、構成されている。A/D回路224は、受信する調整標本化IF信号をデジタル信号に変換して、IF信号を代表するデジタル信号をプロセッサ208に送る。当然のことながら、一部の実施の形態では、増幅回路222を自動利得制御(AGC)回路に置き換えてもよい。
【0019】
[0028]プロセッサ208は、それぞれの検出チャンネル206からのデジタル信号を受信するように接続していて、信号を適切に処理する。プロセッサ208は、とりわけ、移動中の物体が検出領域112内にあるかどうかを決定し、もしそうならば、物体の移動方向、及び、検出された物体が運転者警告領域106の一方又は懸念のある運転者警告領域108の一方内にあるかどうかを決定する。その際、プロセッサ208は、この後者の決定に基づいて、1以上の適切な信号を外部機器に送って、適切な警告を生成し発する。図示していない外部機器から発せられる警告には、例えば、照明光、可聴音又は双方がある。一部の実施の形態では、プロセッサ208は、また、図示していない他の様々な車両システムと交信可能にして、潜在的に望ましくない車両の動きを行うドライバーに警告することができる。例えば、プロセッサ208は、好適な車両操縦センサ、ウィンカー等と作動可能に接続してもよい。
【0020】
[0029]また図2に示すように、プロセッサは、パルス発生器204の全般的な作動を制御することが好ましい。この点に関して、当然のことながら、パルス発生器204の機能は、必要とあれば又は所望により、プロセッサ208により実現されこともあり得る。更に当然のことながら、数多くの好適な素子のいずれか1つを用いて又は2以上の素子を組み合わせて、プロセッサ208を実装してもよく、これらの素子としては、幾つか例を挙げると、数多くの汎用マイクロプロセッサ、特定用途向け集積回路(ASICs)、個別論理部品又はデジタル信号プロセッサ(DSPs)のいずれか1つが挙げられる。
【0021】
[0030]次に図5を見ると、パルス発生器204から送られる各種信号の典型的なタイミング図が示されている。図5に明確に示すように、信号は全て同期することが好ましく、振動数制御信号214の電圧振幅が低から高に漸進的に増大する。当然のことながら、他のパルス波形を用いて振動数制御信号214を実行してもよい。更に、図5に示されていないものの、当然のことながら、好ましい実施の形態では、オシレータ制御信号212のデューティ・サイクル(T)は所定の範囲内で不規則に変動する。これは、別の車両に搭載された別の死角検出器110が同時にオンになる可能性を著しく低減する。
【0022】
[0031]現在のレーダに基づく死角検出システムは、位相角アンビギュイティを示し、他の車両に搭載された同様のレーダに基づくシステムを干渉するかも知れないことが、先の説明で指摘された。本明細書に記載の死角検出器110は、多周波探知能力を実行することによって位相角アンビギュイティを克服し、1以上のアンテナ205の設置によって、上述の不規則なパルスの発生に加えて干渉問題を克服する。1以上のアンテナ205の設置については、後に更に詳細に説明する。しかし、以下に今まで以上に詳しく説明するが、3種の異なる周波数を送受信するようにRFセンサ202を構成することによって、位相角アンビギュイティが解消される。
【0023】
[0032]好ましい実施の形態では、RFセンサ202から送信される3種の周波数(F1,F2,F3)は、ほんの少し異なるだけである。即ち、F2=F1+Δ1及びF3=F1+Δ2であり、Δ1<<F1及びΔ2<<F1である。その結果、移動中のターゲットによる反射から生じる付随ドップラー周波数のシフトはほんの少し異なるだけであり、3種の付随ドップラーIF信号間の位相差から、下記の式に従って、RFセンサ202から移動中のターゲットまでの距離(R)を求めることができる。
【数1】

式中、RはRFセンサ202からのターゲットの距離(m)であり、cは単位秒当たりの光速(3×108m)であり、ΔNはF1とF2又はF1とF3間の周波数差であり、ΔφはそれぞれのドップラーIF信号間(例えば、IF1とIF2又はIF1とIF3)の位相差(ラジアン)である。上記の式で位相差(Δφ)の絶対値が用いられているが、位相差(Δφ)の符号(+/−)を用いて、送信信号を反射する移動中のターゲットの移動方向を求め得ることに、気付くであろう。
【0024】
[0033]上記の式を用いる説明に役立つ実例として、RFセンサから送信される第一と第二の周波数(F1,F2)が3MHzほど異なり(例えば、Δ1=F2−F1=3MHz)、同じく第一と第三の周波数(F1,F3)が5MHzほど異なる(例えば、Δ2=F3−F1=5MHz)ように、RFセンサ202を構成すると仮定する。更に、参考用に検出チャンネル206-1 を用い、移動中のターゲットによる反射から生じるドップラーIF信号の位相を、φ1=0°、φ2=36°、φ3=60°とする。これらの値を上記の式に当てはめると、ターゲットまでの到達距離(R)は5mと計算される。位相差が正であるので、これは、ターゲットが存在し、RFセンサ202の方向に移動中であることを示す。注目すべきは、得られる3種のドップラーIF信号の位相が、φ1=0°、φ2=−36°、φ3=−60°であるならば、その時は計算される到達距離(R)も5mであろう。しかし、位相差が負であるので、これは、ターゲットがRFセンサ202から離れながら移動しつつあることを示すであろう。
【0025】
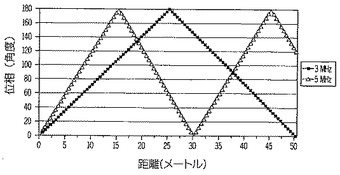
[0034]図6を参照すると、システムが位相アンビギュイティに起因する到達距離アンビギュイティを避ける仕方が、グラフで示されている。特に、システムが第一及び第二の周波数(F1,F2)のみで信号を送信すると、その時1つのターゲットによる反射が3MHzの周波数差で生じることが分かる。更に、付随ドップラーIF信号(IF1,IF2)の位相差は、36°の位相遅延又は324°の位相前進の可能性があり得る。その結果、計算される到達距離は、5m(36°の位相差では)又は45m(324°の位相差では)のいずれかであり、到達距離アンビギュイティを生み出すであろう。しかし、システムが5MHzの差を生み出す第三の周波数(F3)を送信するため、付随ドップラーIF信号の位相差(IF1とIF3)は、60°の位相遅延又は300°の位相前進の可能性があり得る。これら2つの位相角は、付随する5MHzの周波数差に関して、5m(60°の位相差では)又は25m(300°の位相差では)と計算される到達距離に対応する。周波数の対(例えば、F1,F2及びF1,F3)間の共通の到達距離は5mであるので、25m及び45mの曖昧な値を消去することができる。
【0026】
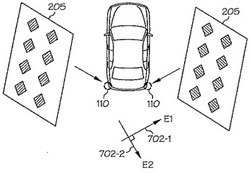
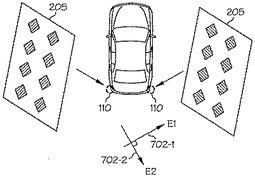
[0035]各死角検出器110と協働する1以上のアンテナ205は、様々に構成し実施することができる。しかし、図7に示すように、1以上のアンテナ205を45°の直線偏波(linear polarized)アンテナとして設置することが好ましい。更に、図示の実施例における1以上のアンテナ205は2×4のパッチ列(patch array)であるが、当然のことながら、1×4のパッチ列、2×2のパッチ列、又は様々な寸法のパッチ列を用いて、各アンテナ205を実現することもできる。また、2,3例を挙げると、例えばスロット・アレイ又はホーン・アンテナ等の他の数多くのアンテナ型式のいずれか1つを用いて、1以上のアンテナ205を実施することができるであろう。
【0027】
[0036]本明細書に記載の死角検出器110は、1以上のアンテナ205の上記設置に少なくとも一部が起因して、前述の干渉問題に遭遇するようなことがない。特に、そして図8,9により明確に示すように、同じ方向(図8)又は反対方向(図9)のいずれかに移動しつつある車両102に搭載された死角検出器110から放射される電場702-1,702-2は、互いに直交する。その結果、死角検出器110間のRF干渉が、解消されるか又は少なくとも実質的に軽減する。理解を明確かつ容易にするために、図8は2台の車両102-1,102-2の側面図を示し、双方車両は同じ方向802に移動しつつあることに、気付くであろう。更に、図9は、一方の方向902に移動中しつつある一方の車両102-1、及び反対方向904に移動しつつある別の車両102-2の側面図を示している。
【0028】
[0037]以上の詳細な説明には少なくとも1つの典型的な実施例を提示してきたが、当然のことながら膨大な数の変更が存在する。同様に当然のことながら、1つ又は複数の典型的な実施の形態は、単なる例にすぎず、本発明の範囲、適用可能性又は構成を決して限定しようとするものではない。むしろ、以上の詳細な説明は、本発明の典型的な実施の形態を実施する簡便な道筋を当業者に提供するであろう。典型的な実施の形態に記載された構成要素の機能及び配置における種々の変更が、本発明の範囲から逸脱することなく、なされ得ることを理解するであろう。
【図面の簡単な説明】
【0029】
【図1】走行面及び車両周囲の様々な領域上の典型的な車両を示す図面である。
【図2】図1の車両に搭載可能な無線周波数近接センサの典型的な実施例の機能的ブロック図を示す。
【図3】図2の近接センサの実装に用いられ得る無線周波数センサの典型的な実施例の機能的ブロック図である。
【図4】図2の近接センサの実装に用いられ得る無線周波数センサの別の典型的な実施例の機能的ブロック図である。
【図5】図2の死角検出器において発生する各種信号の典型的なタイミング図を示す。
【図6】図2の典型的な死角検出器の多周波探知検出能力をグラフで示す。
【図7】図2の死角検出器により放射される典型的な電場を単純化して示す。
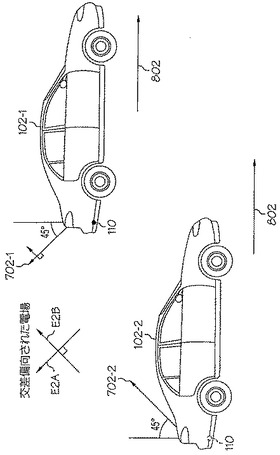
【図8】同じ方向に走行する車両に搭載された死角検出器から放射される典型的な電場を単純化して示す。
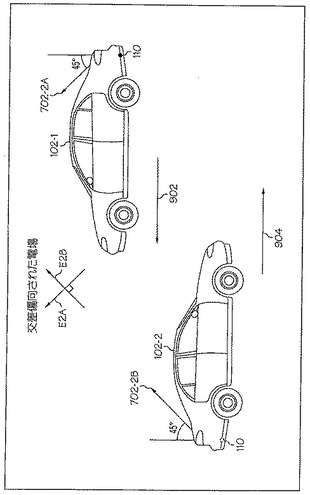
【図9】反対方向に走行する車両に搭載された死角検出器から放射される典型的な電場を単純化して示す。
【技術分野】
【0001】
本出願は、2007年9月14日に出願の米国仮出願 第60/972,485号の利益を主張する。[0002]本発明は、全般的に近接センサ(proximity sensor)に関し、より詳細には、車両の死角(vehicle blind spot)における物体の検知に用いることができる無線周波数(RF:radio frequency)近接センサに関する。
【背景技術】
【0002】
[0003]多くの自走車両は、車両の近くにあるかも知れない物体が車両運転者にとって見づらいと思われる、車両周囲の領域があるように製造される。これらの領域は典型的には“死角”といわれている。車両の死角の特定の位置は、例えば、車両モデルや車両運転者により異なるであろう。しかし、典型的な車両の死角位置としては、車両の後部方向に広がる車両運転者の左右や車両の後部の領域が挙げられる。特定の車両の死角の特定の位置や大きさがどうであろうと、死角は車両の死角にある物体に車両が侵入する可能性を増大させる。
【0003】
[0004]車両の死角の大きさを縮小させるかあるいは車両の死角における物体を検出する能力を増強する各種の解決策が、提案されてきた。1つの解決策には、車両の様々な位置に配置された凹面鏡等の様々な形をした鏡を車両に備えることがある。別の解決策としては、車両に1台以上のカメラを取り付けることがある。
【0004】
1台以上のカメラは、車両の死角における障害物の視覚映像を車両運転者に提供する。提案された更に別の解決策では、車両に搭載のレーダ検出システムを用いて、車両の死角における障害物を検出し、警告信号等の情報を車両運転者に提供する。かかるシステムの1つでは、周波数が異なる2つの信号間の相対位相シフトを用いて、車両の死角における物体の存在及び物体までの距離を検出する。
【発明の開示】
【発明が解決しようとする課題】
【0005】
[0005]運転者が車両の死角内の物体を見付ける又は検出するのを支援している時には一般に有用であるが、上述の各解決策には幾つかの欠点がある。例えば、鏡は夜間に又は悪天候下で有効性の低下を示すことがある。カメラに基づくシステムは、ビデオ・カメラ及びビデオ・モニターの使用に依存すると、比較的複雑かつ高価になる可能性がある。しかも、ビデオ・モニターは、気が散ることがあり、又は、車両運転者にとって読み取るのが難しいと思われる比較的複雑な映像を示すことがあって、このようなモニターは気が散ることがある。更に、カメラに基づくシステムも、夜間に又は悪天候下で有効性の低下を示すことがある。従来技術を利用するレーダに基づくシステムは、比較的複雑かつ高価になる可能性がある。加えて、上述のレーダに基づく位相検出システムは、180°以上の位相差ではアンビギュイティ(ambiguity;あいまいさ)を示し、他の車両に搭載したレーダに基づくシステムによって互いに干渉することがあり、これにより有効性及び信頼性が低下する。
【0006】
[0006]従って、夜間に又は悪天候下で十分な有効性を示し、比較的簡単且つ安価であり、アンビギュイティを示さない又は他の検出システムと干渉しない、車両の死角検出器を求める要請がある。本発明はこれらの要請の1以上に応えるものである。
【課題を解決するための手段】
【0007】
[0007]一実施の形態において、また、単に一例として、車両の死角検知システムは、車両に搭載された複数の死角検出器とプロセッサとを含む。各死角検出器には車両周囲の検出領域があり、各死角検出器は、周波数が異なる3種以上の無線周波数(RF:radio frequency)信号を送信し、反射したRF信号を受信し、中間周波数(IF;intermediate frequency)信号を送るよう作動する。各IF信号は反射RF信号の1つを代表し、各反射RF信号は検出領域内に存在する移動中の物体によって反射された送信RF信号に対応する。プロセッサは、少なくとも1つの死角検出器から送られるIF信号を受信するように接続されると共に、IF信号を受信すると、移動中の物体が少なくとも1つの死角検出器の検出領域内にあるかどうかを決定するよう作動する。
【0008】
[0008]別の典型的な実施の形態において、近接センサは、電波即ち無線周波数(RF)センサと、パルス発生器と、複数の検出チャンネルと、プロセッサとを含む。RFセンサは、周波数制御信号を受信するように接続されると共に、その信号に応答して、周波数が異なる複数のRF信号を発生及び送信するよう作動する。RFセンサは、更に、反射したRF信号を受信し、かつ中間周波(IF)信号を送るよう作動する。各IF信号は反射RF信号の1つを代表し、各反射RF信号はある方向に移動しつつある物体によって反射された送信RF信号に対応する。パルス発生器は、RFセンサに接続されると共に、RFセンサに周波数制御信号を送るよう作動する。各検出チャンネルは、RFセンサから送られるIF信号の1つを受信するように接続されると共に、IF信号を代表するデジタル信号を送るよう作動する。プロセッサは、それぞれの検出チャンネルから送られるデジタル信号を受信するように接続されると共に、その信号を受信すると、送信RF信号を反射した移動中の物体までの距離と物体の方向を決定するよう作動する。
【0009】
[0009]更に別の典型的な実施の形態において、ある移動方向に移動しつつある物体の存在及び物体までの距離を検出する方法は、周波数が異なる3種以上の無線周波数(RF)信号の送信を含む。移動中の物体によって反射された送信RF信号に対応する反射RF信号が受信される。2組以上の反射RF信号間の相対位相角(relative phase angles)が決定され、決定された相対位相角から物体までの距離と物体の移動方向が決定される。
【発明を実施するための最良の形態】
【0010】
[0010]以下に、同様の構成要素には同一の番号を付して、添付の図面と共に本発明を説明する。[0019]以下の詳細な説明は、本来単なる例示にすぎず、本発明を限定したり本発明の適用及び使用を制限しようとするものではない。更に、前記背景技術又は以下の詳細な説明に提示されるいかなる理論により、本発明が何ら束縛されるものではない。この点に関して、本発明のセンサの実施例は自動車の死角検出システムで実施されるように説明されているが、当然のことながら、センサは数多くの他のシステムや環境で実施されてもよい。例えば、居住、商業、政府もしくは軍事用建物又は施設付近の物体の存在を検出するために、センサを使用することができる。更に、本明細書で用いられるように、用語“物体(object)”又は“複数の物体(objects)”は、生命のある物及び無生物の双方に当てはめても差し支えない。
【0011】
[0020]さて図1を参照すると、典型的な車両102が走行面104に示される。図1には様々な領域も図解されている。これらの領域としては、複数の運転者警告領域106(例えば、106-L,106-R)、複数の懸念のある運転者警告領域108(例えば、108-L,108-R)、及び複数の検出領域112(例えば、112-L,112-R)が挙げられる。運転者警告領域106は、領域106-L,106-R内のいずれかで移動中の物体が検出されると、車両運転者に警告を発することが望ましい領域を示す。懸念のある運転者警告領域108は、領域108-L,108-R内のいずれかで移動中の物体が検出されると、そのように望むならば、車両運転者に警告を発することができる領域を示す。検出領域112は、車両の死角検出器110の検出能力を示す。図示の実施例では、車両102は、検出領域112内の物体を検出する複数の死角検出器110を含む。より詳細には、車両102は、左側の死角検出器110-Lと右側の死角検出器110-Rを装備することが好ましい。一側につき1つの死角検出器110が図示されているが、当然のことながら、車両102は、複数の左側及び右側死角検出器108-L,108-Rを装備することもあり得る。
【0012】
[0021]更に先に進む前に、懸念のある運転者警告領域108は、図1に図示されたものより大きくても小さくてもよいことが指摘される。実際、一部の実施の形態では、警告領域は図1の境界線105まで広がることがあり得る。勿論、懸念のある警告領域108の広がりは検出領域112の広がりにより制限され、後者の広がりはやはり車両の死角検出器110の検出範囲により制限され、その実施の形態を後に説明する。
【0013】
[0022]次に図2を見ると、死角検出器110の典型的な一実施例の機能的ブロック図が示されている。図示の死角検出器110は、無線周波数(RF)近接センサであり、RFセンサ202、パルス発生器204、複数の検出チャンネル206(例えば、206-1,206-2,206-3 )、及びプロセッサ208を含む。死角検出器/RF近接センサ110についてより詳細に説明する前に、センサ110は自動車死角検出システムとの関連において説明されるが、数多くの広範なシステム及び環境で、そして数多くの広範な機能を目指して、センサを使用できることがもう一度指摘される。
【0014】
[0023]RFセンサ202は、無線周波数(RF)信号を送信し、1以上のアンテナ205を介して、その検出領域112内の移動中の物体によって反射されたRF信号を受信するように、構成される。様々な周波数のRF信号を送信及び受信するように、RFセンサ202を構成することができる。しかし、マイクロ波周波数スペクトルに見られるRFの周波数を送受信するように、RFセンサ202を構成することが好ましい。また、RFセンサ202は、好ましくは、多周波RF信号を送受信するように構成される。即ち、RFセンサ202は同一周波数のRF信号を送受信するだけではない。むしろ、RFセンサ202はドップラー情報を含む周波数の異なるRF信号を送受信する。RFセンサ202は、反射したRF信号を受信すると、送信されて反射したRF信号を結合して、周波数が異なるドップラーIF(intermediate frequency)信号を発生し、これを検出チャンネル206に送る。図示の実施例では、RFセンサ202は、3種の異なる周波数(F1,F2,F3)のRF信号を送受信するように構成されている。この理由については後に更に論じる。当然のことながら、異なる周波数が上記の数より多いRF信号を送受信するように、RFセンサ202を構成することもあり得る。しかし、異なる周波数の数は検出チャンネル206の数と等しいことが好ましい。
【0015】
[0024]RFセンサ202が送受信する信号のRFの周波数は、少なくとも一部がパルス発生器204によって制御される。パルス発生器204は、RFセンサ202に接続しおり、複数の制御信号をRFセンサ202に送る。制御信号は、RF信号を発生するRFセンサ202内の図示していないオシレータ(以下に説明する)の作動及び振動数を制御する。このように、図示の実施例では、制御信号はオシレータ制御信号212と振動数制御信号214とを含む。オシレータ制御信号212はRFセンサのオシレータをオン・オフに切り替え、振動数制御信号214はオシレータの振動数を制御する。また、パルス発生器204は、チャンネル・イネーブル信号216(例えば、216-1,216-2,216-3 )をそれぞれの検出チャンネル206に送る。チャンネル・イネーブル信号216は、検出チャンネル206を選択的に有効及び無効にする。
【0016】
[0025]検出チャンネル206について説明する前に、数多くの好適なディバイス及び回路構成のいずれか1つを用いて、RFセンサ202を実装できることが指摘される。図3に示すある特定の回路構成では、電圧制御オシレータ(VCO)302、サーキュレータ304、及びミキサー306を含む。図4に示す更に別の典型的な構成では、VCO402、光増幅器404、カップラー406、及びミキサー408を含む。図3の構成ではRFセンサ202は1つのアンテナ205しか含んでいないが、一方、図4の構成ではRFセンサ202は2つのアンテナ−−送信アンテナ205-1と受信アンテナ205-2とを含んでいる、ことが分かるであろう。
【0017】
[0026]検出チャンネル206は各々、RFセンサ202から送られるIF信号を処理するように構成されている。より詳しくは、各検出チャンネル206は、異なるRFの周波数に対応する信号のドップラーIF信号を処理するように構成されている。このように、死角検出器110は3つの検出チャンネル206-1,206-2,206-3 を含む。しかし、当然のことながら、RFセンサ202及びパルス発生器204が、4種以上の異なるRFの周波数の送受信を可能にするように構成されるならば、死角検出器110は上記の数より多い検出チャンネル206を含むこともあり得る。いずれの場合も、各検出チャンネル206は、スイッチ回路215、サンプルホールド(S/H)回路218、増幅回路222、及びアナログ・デジタル変換(A/D)回路224を含む。スイッチ回路215はパルス発生器204から送られるチャンネル・イネーブル信号216に応答して、適切なRFの周波数に対応するIF信号をS/H回路218に選択的に送る。
【0018】
[0027]S/H回路218は、スイッチ回路215から選択的に送られたIF信号を受信し、公知の機能性を実現しながら、標本化IF信号を増幅回路222に送る。増幅回路222は、標本化IF信号の好適な信号処理を行って、調整された標本化IF信号をA/D回路224に送るように、構成されている。A/D回路224は、受信する調整標本化IF信号をデジタル信号に変換して、IF信号を代表するデジタル信号をプロセッサ208に送る。当然のことながら、一部の実施の形態では、増幅回路222を自動利得制御(AGC)回路に置き換えてもよい。
【0019】
[0028]プロセッサ208は、それぞれの検出チャンネル206からのデジタル信号を受信するように接続していて、信号を適切に処理する。プロセッサ208は、とりわけ、移動中の物体が検出領域112内にあるかどうかを決定し、もしそうならば、物体の移動方向、及び、検出された物体が運転者警告領域106の一方又は懸念のある運転者警告領域108の一方内にあるかどうかを決定する。その際、プロセッサ208は、この後者の決定に基づいて、1以上の適切な信号を外部機器に送って、適切な警告を生成し発する。図示していない外部機器から発せられる警告には、例えば、照明光、可聴音又は双方がある。一部の実施の形態では、プロセッサ208は、また、図示していない他の様々な車両システムと交信可能にして、潜在的に望ましくない車両の動きを行うドライバーに警告することができる。例えば、プロセッサ208は、好適な車両操縦センサ、ウィンカー等と作動可能に接続してもよい。
【0020】
[0029]また図2に示すように、プロセッサは、パルス発生器204の全般的な作動を制御することが好ましい。この点に関して、当然のことながら、パルス発生器204の機能は、必要とあれば又は所望により、プロセッサ208により実現されこともあり得る。更に当然のことながら、数多くの好適な素子のいずれか1つを用いて又は2以上の素子を組み合わせて、プロセッサ208を実装してもよく、これらの素子としては、幾つか例を挙げると、数多くの汎用マイクロプロセッサ、特定用途向け集積回路(ASICs)、個別論理部品又はデジタル信号プロセッサ(DSPs)のいずれか1つが挙げられる。
【0021】
[0030]次に図5を見ると、パルス発生器204から送られる各種信号の典型的なタイミング図が示されている。図5に明確に示すように、信号は全て同期することが好ましく、振動数制御信号214の電圧振幅が低から高に漸進的に増大する。当然のことながら、他のパルス波形を用いて振動数制御信号214を実行してもよい。更に、図5に示されていないものの、当然のことながら、好ましい実施の形態では、オシレータ制御信号212のデューティ・サイクル(T)は所定の範囲内で不規則に変動する。これは、別の車両に搭載された別の死角検出器110が同時にオンになる可能性を著しく低減する。
【0022】
[0031]現在のレーダに基づく死角検出システムは、位相角アンビギュイティを示し、他の車両に搭載された同様のレーダに基づくシステムを干渉するかも知れないことが、先の説明で指摘された。本明細書に記載の死角検出器110は、多周波探知能力を実行することによって位相角アンビギュイティを克服し、1以上のアンテナ205の設置によって、上述の不規則なパルスの発生に加えて干渉問題を克服する。1以上のアンテナ205の設置については、後に更に詳細に説明する。しかし、以下に今まで以上に詳しく説明するが、3種の異なる周波数を送受信するようにRFセンサ202を構成することによって、位相角アンビギュイティが解消される。
【0023】
[0032]好ましい実施の形態では、RFセンサ202から送信される3種の周波数(F1,F2,F3)は、ほんの少し異なるだけである。即ち、F2=F1+Δ1及びF3=F1+Δ2であり、Δ1<<F1及びΔ2<<F1である。その結果、移動中のターゲットによる反射から生じる付随ドップラー周波数のシフトはほんの少し異なるだけであり、3種の付随ドップラーIF信号間の位相差から、下記の式に従って、RFセンサ202から移動中のターゲットまでの距離(R)を求めることができる。
【数1】
式中、RはRFセンサ202からのターゲットの距離(m)であり、cは単位秒当たりの光速(3×108m)であり、ΔNはF1とF2又はF1とF3間の周波数差であり、ΔφはそれぞれのドップラーIF信号間(例えば、IF1とIF2又はIF1とIF3)の位相差(ラジアン)である。上記の式で位相差(Δφ)の絶対値が用いられているが、位相差(Δφ)の符号(+/−)を用いて、送信信号を反射する移動中のターゲットの移動方向を求め得ることに、気付くであろう。
【0024】
[0033]上記の式を用いる説明に役立つ実例として、RFセンサから送信される第一と第二の周波数(F1,F2)が3MHzほど異なり(例えば、Δ1=F2−F1=3MHz)、同じく第一と第三の周波数(F1,F3)が5MHzほど異なる(例えば、Δ2=F3−F1=5MHz)ように、RFセンサ202を構成すると仮定する。更に、参考用に検出チャンネル206-1 を用い、移動中のターゲットによる反射から生じるドップラーIF信号の位相を、φ1=0°、φ2=36°、φ3=60°とする。これらの値を上記の式に当てはめると、ターゲットまでの到達距離(R)は5mと計算される。位相差が正であるので、これは、ターゲットが存在し、RFセンサ202の方向に移動中であることを示す。注目すべきは、得られる3種のドップラーIF信号の位相が、φ1=0°、φ2=−36°、φ3=−60°であるならば、その時は計算される到達距離(R)も5mであろう。しかし、位相差が負であるので、これは、ターゲットがRFセンサ202から離れながら移動しつつあることを示すであろう。
【0025】
[0034]図6を参照すると、システムが位相アンビギュイティに起因する到達距離アンビギュイティを避ける仕方が、グラフで示されている。特に、システムが第一及び第二の周波数(F1,F2)のみで信号を送信すると、その時1つのターゲットによる反射が3MHzの周波数差で生じることが分かる。更に、付随ドップラーIF信号(IF1,IF2)の位相差は、36°の位相遅延又は324°の位相前進の可能性があり得る。その結果、計算される到達距離は、5m(36°の位相差では)又は45m(324°の位相差では)のいずれかであり、到達距離アンビギュイティを生み出すであろう。しかし、システムが5MHzの差を生み出す第三の周波数(F3)を送信するため、付随ドップラーIF信号の位相差(IF1とIF3)は、60°の位相遅延又は300°の位相前進の可能性があり得る。これら2つの位相角は、付随する5MHzの周波数差に関して、5m(60°の位相差では)又は25m(300°の位相差では)と計算される到達距離に対応する。周波数の対(例えば、F1,F2及びF1,F3)間の共通の到達距離は5mであるので、25m及び45mの曖昧な値を消去することができる。
【0026】
[0035]各死角検出器110と協働する1以上のアンテナ205は、様々に構成し実施することができる。しかし、図7に示すように、1以上のアンテナ205を45°の直線偏波(linear polarized)アンテナとして設置することが好ましい。更に、図示の実施例における1以上のアンテナ205は2×4のパッチ列(patch array)であるが、当然のことながら、1×4のパッチ列、2×2のパッチ列、又は様々な寸法のパッチ列を用いて、各アンテナ205を実現することもできる。また、2,3例を挙げると、例えばスロット・アレイ又はホーン・アンテナ等の他の数多くのアンテナ型式のいずれか1つを用いて、1以上のアンテナ205を実施することができるであろう。
【0027】
[0036]本明細書に記載の死角検出器110は、1以上のアンテナ205の上記設置に少なくとも一部が起因して、前述の干渉問題に遭遇するようなことがない。特に、そして図8,9により明確に示すように、同じ方向(図8)又は反対方向(図9)のいずれかに移動しつつある車両102に搭載された死角検出器110から放射される電場702-1,702-2は、互いに直交する。その結果、死角検出器110間のRF干渉が、解消されるか又は少なくとも実質的に軽減する。理解を明確かつ容易にするために、図8は2台の車両102-1,102-2の側面図を示し、双方車両は同じ方向802に移動しつつあることに、気付くであろう。更に、図9は、一方の方向902に移動中しつつある一方の車両102-1、及び反対方向904に移動しつつある別の車両102-2の側面図を示している。
【0028】
[0037]以上の詳細な説明には少なくとも1つの典型的な実施例を提示してきたが、当然のことながら膨大な数の変更が存在する。同様に当然のことながら、1つ又は複数の典型的な実施の形態は、単なる例にすぎず、本発明の範囲、適用可能性又は構成を決して限定しようとするものではない。むしろ、以上の詳細な説明は、本発明の典型的な実施の形態を実施する簡便な道筋を当業者に提供するであろう。典型的な実施の形態に記載された構成要素の機能及び配置における種々の変更が、本発明の範囲から逸脱することなく、なされ得ることを理解するであろう。
【図面の簡単な説明】
【0029】
【図1】走行面及び車両周囲の様々な領域上の典型的な車両を示す図面である。
【図2】図1の車両に搭載可能な無線周波数近接センサの典型的な実施例の機能的ブロック図を示す。
【図3】図2の近接センサの実装に用いられ得る無線周波数センサの典型的な実施例の機能的ブロック図である。
【図4】図2の近接センサの実装に用いられ得る無線周波数センサの別の典型的な実施例の機能的ブロック図である。
【図5】図2の死角検出器において発生する各種信号の典型的なタイミング図を示す。
【図6】図2の典型的な死角検出器の多周波探知検出能力をグラフで示す。
【図7】図2の死角検出器により放射される典型的な電場を単純化して示す。
【図8】同じ方向に走行する車両に搭載された死角検出器から放射される典型的な電場を単純化して示す。
【図9】反対方向に走行する車両に搭載された死角検出器から放射される典型的な電場を単純化して示す。
【特許請求の範囲】
【請求項1】
車両(102)に搭載された複数の死角検出器(110)と、プロセッサ(208)とを含む車両の死角検知システムであって、
各死角検出器(110)は、車両(102)周囲の検出領域(112)を有し、
各死角検出器(110)は、(i)周波数が異なる3種以上の無線周波数(RF)信号を送信し、(ii)反射RF信号を受信し、(iii)中間周波(IF)信号を送るよう作動し、
各IF信号は、反射RF信号の1つを代表し、各反射RF信号は、検出領域(112)内に存在する移動中の物体によって反射された送信RF信号に対応し、
前記プロセッサ(208)は、少なくとも1つの死角検出器(110)から送られるIF信号を受信するように接続されると共に、IF信号を受信すると、移動中の物体が少なくとも1つの死角検出器(110)の検出領域(112)内にあるかどうかを決定するよう作動する、車両の死角検知システム。
【請求項2】
無線周波数(RF)センサ(202)と、パルス発生器(204)と、複数の検出チャンネル(206)と、プロセッサ(208)とを含む近接センサ(110)であって、
RFセンサ(202)は、周波数制御信号(214)を受信するように接続されると共に、該周波数制御信号に応答して、周波数が異なる複数のRF信号を発生及び送信するよう作動し、RFセンサ(202)は、更に、反射したRF信号を受信し、かつ中間周波(IF)信号を送るよう作動し、各IF信号は反射RF信号の1つを代表し、各反射RF信号は、移動中の物体によって反射された送信RF信号に対応し、
パルス発生器(204)は、RFセンサ(202)に接続されると共に、RFセンサへ周波数制御信号(214)を送るよう作動可能であり、
各検出チャンネル(206)は、RFセンサ(202)から送られるIF信号の1つを受信するように接続されると共に、IF信号を代表するデジタル信号を送るよう作動し、
プロセッサ(208)は、それぞれの検出チャンネル(206)から送られるデジタル信号を受信するように接続されると共に、該デジタル信号を受信すると、送信RF信号を反射した移動中の物体までの距離と該物体の移動方向(802)を決定するよう作動する、
近接センサ。
【請求項3】
物体の存在及び該物体までの距離を検出する方法であって、
周波数が異なる3種以上の無線周波数(RF)信号を送信する工程と、
物体によって反射された送信RF信号に対応する、それぞれの反射RF信号を受信する工程と、
2組以上の反射RF信号間の相対位相角を決定する工程と、
決定された相対位相角から物体までの距離と該物体の移動方向を決定する工程と、を含む方法。
【請求項1】
車両(102)に搭載された複数の死角検出器(110)と、プロセッサ(208)とを含む車両の死角検知システムであって、
各死角検出器(110)は、車両(102)周囲の検出領域(112)を有し、
各死角検出器(110)は、(i)周波数が異なる3種以上の無線周波数(RF)信号を送信し、(ii)反射RF信号を受信し、(iii)中間周波(IF)信号を送るよう作動し、
各IF信号は、反射RF信号の1つを代表し、各反射RF信号は、検出領域(112)内に存在する移動中の物体によって反射された送信RF信号に対応し、
前記プロセッサ(208)は、少なくとも1つの死角検出器(110)から送られるIF信号を受信するように接続されると共に、IF信号を受信すると、移動中の物体が少なくとも1つの死角検出器(110)の検出領域(112)内にあるかどうかを決定するよう作動する、車両の死角検知システム。
【請求項2】
無線周波数(RF)センサ(202)と、パルス発生器(204)と、複数の検出チャンネル(206)と、プロセッサ(208)とを含む近接センサ(110)であって、
RFセンサ(202)は、周波数制御信号(214)を受信するように接続されると共に、該周波数制御信号に応答して、周波数が異なる複数のRF信号を発生及び送信するよう作動し、RFセンサ(202)は、更に、反射したRF信号を受信し、かつ中間周波(IF)信号を送るよう作動し、各IF信号は反射RF信号の1つを代表し、各反射RF信号は、移動中の物体によって反射された送信RF信号に対応し、
パルス発生器(204)は、RFセンサ(202)に接続されると共に、RFセンサへ周波数制御信号(214)を送るよう作動可能であり、
各検出チャンネル(206)は、RFセンサ(202)から送られるIF信号の1つを受信するように接続されると共に、IF信号を代表するデジタル信号を送るよう作動し、
プロセッサ(208)は、それぞれの検出チャンネル(206)から送られるデジタル信号を受信するように接続されると共に、該デジタル信号を受信すると、送信RF信号を反射した移動中の物体までの距離と該物体の移動方向(802)を決定するよう作動する、
近接センサ。
【請求項3】
物体の存在及び該物体までの距離を検出する方法であって、
周波数が異なる3種以上の無線周波数(RF)信号を送信する工程と、
物体によって反射された送信RF信号に対応する、それぞれの反射RF信号を受信する工程と、
2組以上の反射RF信号間の相対位相角を決定する工程と、
決定された相対位相角から物体までの距離と該物体の移動方向を決定する工程と、を含む方法。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2009−109484(P2009−109484A)
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【外国語出願】
【出願番号】特願2008−233181(P2008−233181)
【出願日】平成20年9月11日(2008.9.11)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
【公開日】平成21年5月21日(2009.5.21)
【国際特許分類】
【出願番号】特願2008−233181(P2008−233181)
【出願日】平成20年9月11日(2008.9.11)
【出願人】(500575824)ハネウェル・インターナショナル・インコーポレーテッド (1,504)
【Fターム(参考)】
[ Back to top ]