
無線周波数電力搬送システム
電力を動的負荷(260)に搬送するシステム(200)及び方法が提供される。このシステムは、実質的に一定の電力開ループ応答を有するDC電力を提供する電源(210)と、前記DC電力をRF電力に変換する電力増幅器(220)と、電圧と電流と前記RF電力と関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とを測定するセンサ(240)と、動的負荷(260)のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正する電気的に制御可能なインピーダンス・マッチング・システム(250、252)と、前記電気的に制御可能なインピーダンス・マッチング・システムを制御するコントローラ(230)と、を備えている。このシステム(200)は、更に、前記電力増幅器によって搬送される電力を決定するセンサ較正測定モジュールと、前記動的負荷(260)に搬送される電力を決定する電子的マッチング・システム較正モジュール(252)と、前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算する電力消費モジュールとを含む。

【発明の詳細な説明】
【技術分野及び背景技術】
【0001】
動的負荷にRF電力を供給するには、様々なアプローチが存在する。RF生成器は、約400kHzから約200MHzまで周波数で動的負荷に電力を典型的に供給する。科学、産業及び医療において用いられる周波数は、約2MHz、13.56MHz及び27MHzである。
【0002】
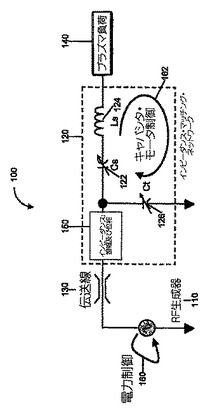
図1Aに示されているように、動的負荷(つまりプラズマ負荷140)にRF電力を提供するあるシステム100は、固定周波数RF生成器110と、50Ωの伝送線路130によって接続されている2軸型調整可能マッチング・ネットワーク120とを含む。調整可能なマッチング・ネットワーク120は、直列の電動真空可変キャパシタ122と、インダクタ124と、シャント型の電動真空バリコン126とを含む。直列及びシャント・キャパシタンスを決定するのに用いられるアルゴリズムは、振幅及び位相検出器150を用いてなされるのが通常であるインピーダンス測定値に基づく。独立的な電力制御は、RF生成器110における電力測定値に基づいている。電力制御ループ160とインピーダンス制御ループ162とは独立している。
【0003】
図1Bで示されているように、RF電力を動的負荷に提供する別のシステム100’は、RF生成器110によって給電され50Ωの伝送線路130によって接続される固定要素型のマッチング・ネットワーク120’を含む。固定要素型のマッチング・ネットワーク’120は、直列コンデンサ122とインダクタ124とシャント・キャパシタ126とを含んでいる。RF生成器110の周波数は、ある範囲(例えば、13.56MHz+−5%)に調整することができる。RF生成器110の周波数コマンドは、電圧定在波比(VSWR)の値に基づく。独立した電力ループ及びVSWR(インピーダンス)制御ループ160’は、RF生成器110の出力での測定値に基づく。
図1Cに示されているように、動的負荷にRF電力を供給する別のシステム100”は、一体化されたRF生成器インピーダンス・マッチング・ネットワークを120”含む。このRF生成器インピーダンス・マッチング・ネットワーク120”は、直列キャパシタ122と、インダクタ124と、複数のシャント・キャパシタ126a・・・126nとを含む。シャント・キャパシタ126a...126nは、これらのキャパシタ126をグランドに結合しグラウンドから切断するスイッチング回路127aに結合されている。システム100”の電源制御と周波数制御160”とは、同時に導通することはない。
【発明の概要】
【0004】
従来の技術及び方法には欠点が。従来型の技術及び方法では、伝送線路を介して接続される少なくとも2つの必要なモジュールである1)RF生成器/増幅器と2)インピーダンス・マッチング・ネットワークとに起因して、高コストになりがちである。更に、それぞれのモジュールに、RF電圧/電流センサ又は振幅/位相検出器が必要になる。
【0005】
プラズマ・インピーダンスは、プラズマに搬送される電力の関数である。更に、RF生成器によって搬送される電力は、この生成器から見たインピーダンスの関数である。その結果として、搬送される電力と負荷インピーダンスとの間には循環的な相互依存が明確に存在し、よって、クロスカップリングを備えたマルチ入力マルチ出力(MIMO)システムが生じる。従来型のシステムでは、RF生成器制御ループとインピーダンス・マッチング制御ループとは独立であるから、電力制御とインピーダンス・マッチング制御ループとの間のクロスカップリングを補償することができない。これにより、閉ループの低いパフォーマンスが生じてしまう。
【0006】
任意の制御対象となるシステムの動的応答は、最も低速の機能モジュール(センサ、アクチュエータ、制御システム・パラメータなど)と同じくらいでしかない。従来型のシステムでは、最も低速の機能モジュールは、DC電源であるのが典型的である。具体的には、RF電力増幅器の入力に供給されたDC電力は、通常は、高周波化をフィルタリングするのに用いられる大きな電解キャパシタを含む。そのようなフィルタ・ネットワークを用いることに伴う短所は、動的応答(例えば、電力コマンドのステップ変化に対する応答)が、制御更新速度とは無関係に低速であることである。よって、そのようなシステムではプラズマの不安定性を十分に補償できない。
【0007】
モータによって駆動される真空キャパシタを使用するシステムでは、応答時間は数百ミリ秒のオーダーである。考察対象であるプラズマ過渡現象(インピーダンスの突然で迅速な変更)が数百マイクロ秒の間に生じるから、真空キャパシタはプラズマ過渡現象に起因する負荷変動と一致するためには使えない。
【0008】
従来用いられるマッチング・ネットワークの制御アルゴリズムは、測定されたインピーダンスの実部及び虚部に依存している。インピーダンス測定ベースのマッチング制御は、内在的な欠点を有する。例えば、インピーダンスの実部を訂正又は修正するシャント・キャパシタンスが変化すると、その結果、インピーダンスの虚部に望ましくない変化が生じてしまう。同様に、インピーダンスの虚部を訂正又は修正する直列キャパシタンス又は周波数が変化すると、その結果、インピーダンスの実部に望ましくない変化が生じる。制御対象である変数ベクトル(インピーダンスの実部及び虚部によって定式化される)と制御する側の変数ベクトル(シャント及び直列キャパシタンス又はシャント・キャパシタンス及び周波数とによって定式化される)とを関連付ける行列は、対角行列ではない。よって、インピーダンス測定値ベースの制御アルゴリズムは有効ではない。インピーダンスの振幅及び位相測定値を用いて定式化されるインピーダンス・ベースの制御アルゴリズムも同様に有効ではない。
【0009】
従来技術のための較正方法は、RFRFインピーダンス・アナライザ又はVIプローブを較正する。これらの較正方法では、電子マッチング・ネットワークにおける電力損失は電子マッチング・ネットワークのすべての状態と動作周波数とについて固定されていると仮定している。しかし、電子マッチングネットワークの損失は、システム全体の動作に大きく影響する。
【0010】
したがって、動的プラズマ負荷に供給される電力とそれと関連付けられる損失とを制御する改善された方法及びシステムに対する必要性が存在している。
【0011】
電力を動的負荷に搬送するシステムが提供される。このシステムは、実質的に一定の電力開ループ応答を有するDC電力を提供する電源と、前記DC電力をRF電力に変換する電力増幅器と、電圧と電流と前記RF電力に関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とを測定するセンサと、動的負荷のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正する電気的に制御可能なインピーダンス・マッチング・システムと、前記電気的に制御可能なインピーダンス・マッチング・システムを制御するコントローラと、を備えている。このシステムは、更に、前記電力増幅器によって搬送される電力を決定するセンサ較正測定モジュールと、動的負荷に搬送される電力を決定する電子的マッチング・システム較正モジュールと、前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算する電力消費モジュールと、を更に備えている。
【0012】
ある実施例では、前記電気的に制御可能なインピーダンス・マッチング・システムは、インダクタと、前記インダクタと直列のキャパシタと、前記動的負荷と並列の複数の切換型キャパシタとを含むことがある、前記インダクタは、マルチタップ型のインダクタ又は可変型のインダクタでありうる。前記複数の切換型キャパシタは、それぞれが、スイッチ及び追加的なキャパシタと直列でありうる。別の実施例では、前記電気的に制御可能なインピーダンス・マッチング・システムは、キャパシタと、前記動的負荷と並列である複数の切換型キャパシタとを含んでおり、前記複数のキャパシタはそれぞれがスイッチ及び追加的なキャパシタと直列でありうる。更に別の実施例では、前記電気的に制御可能なインピーダンス・マッチング・システムは、前記電力増幅器と前記動的負荷との間のインピーダンス・マッチングの周波数を制御することができる。
【0013】
ある実施例では、前記前記コントローラは、前記電気的に制御可能なインピーダンス・マッチング・システムを制御して、前記電力増幅器と前記動的負荷との間のインピーダンスに関連付けられたコンダクタンスとサセプタンスとを同時に制御することができる。別の実施例では、前記コントローラは、RF電力周波数とRF電力振幅と前記電力増幅器と前記動的負荷との間のインピーダンスとを同時に制御することができる。更に別の実施例では、前記コントローラは、前記電気的に制御可能なインピーダンス・マッチング・システムを制御し、不安定な動的負荷を安定化する設定点にコンダクタンスとサセプタンスとを調節することができる。
【0014】
前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力は前記電力増幅器によって搬送される電力と前記動的負荷に搬送される電力との差である。前記動的負荷に搬送される電力は、抵抗性負荷に搬送される電力と前記負荷シミュレータの内部で消費される電力との和である。
【0015】
前記センサ較正測定モジュールは、前記センサを抵抗性負荷に較正する。ここで、前記抵抗性負荷は50Ωである。前記電子的マッチング・システム較正モジュールは、前記電気的に制御可能なインピーダンス・マッチング・システムの出力を負荷シミュレータに較正する。前記負荷シミュレータは、逆の(inverse)電気的に制御可能なインピーダンス・マッチング・システムでありうる。前記電子的マッチング・システム較正モジュールは、抵抗性負荷に搬送される電力を決定する電力計較正モジュールと、前記負荷シミュレータにおいて消費される電力を決定する負荷シミュレータ較正モジュールとを含みうる。前記抵抗性負荷は、50Ωでありうる。このRF周波数電力搬送システムは、従来型のシステムと比較すると、少なくとも以下の長所を有する。すなわち、このシステムでは、高速(例えば、ある実施例では、50kHzを超える)のデジタル・マルチ入力マルチ出力(MIMO)制御を用いて、電力設定点の調整、インピーダンス・マッチング、そして、負荷外乱の緩和が提供される。このシステムは、プラズマ負荷特性に過渡的な変化が存在するときや、高速プラズマ安定化を含む条件下でも動作可能である。このシステムは、システム自体の始動時の過渡現象に対してロバストなRF電力搬送システムを提供することができる。このシステムは、高い電力ステップアップ比を提供する。ここで、この高い電力ステップアップ比は100(例えば、15Wから1500Wまで)である。このシステムは、一体型の発電機システム(generator system)の出力に接続された負荷に搬送される電力を測定することができる。このシステムは、制御対象である様々な変数の状態/値と関連する電力損失の変動とは無関係な電力の調整が可能である。このシステムでは、プラズマ負荷のためのレシピ・ベースの較正を不要にすることができる。
【発明を実施するための最良の形態】
【0016】
本発明の以上の及びそれ以外の目的、特徴及び効果は、添付の図面に図解されている本発明の好適実施例に関する以下のより特定の説明から明らかになる。添付の図面は必ずしも寸法通りではなく、むしろ本発明の原理を図解することが強調されている。
【0017】
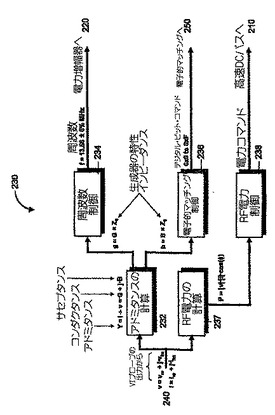
一般的に言えば、一体化された無線周波数(RF)電力搬送システムが、動的負荷(例えば、誘導性及び/又は容量性プラズマ負荷)への適用のために提供される。図2は、一体化された無線周波数(RF)電力運搬システム200の図解である。この一体化されたシステム200の代表的な機能モジュールは、高速DCバス210と、RF電力増幅器(「PA」)220と、デジタル信号プロセッサ(「DSP」)補償器ボード230と、RFインピーダンス・アナライザ又はVIプローブ240と、電子マッチング・ネットワーク250とを含む。システム200は、プラズマ負荷に結合される。この技術分野の当業者であれば理解することであるが、この一体化されたシステム200は広範囲の抵抗性及び無効負荷に関して実現可能である。
【0018】
一般に、高速DCバス210は、電力増幅器220にDC電力を搬送する。電力増幅器220は、高速DCバス210からのDC電力を、ある周波数を有するRF電力に変換する。電子マッチングシステム250は、シャント・キャパシタ(図示せず)を切り換えることにより、電力増幅器220とプラズマ負荷260との間のインピーダンスと一致させて、電力増幅器220からプラズマ負荷260までの安定的で最大の電力転送を容易にする。DSP補償器ボード230は、高速バス・コントローラ212とRFインピーダンス・アナライザ240とから受け取られた測定値に基づいて、システム200の動作を制御する。RFインピーダンス・アナライザ240は、RMS電圧と、RMS電流と、RF電圧ベクトルとRF電流ベクトルとの間の位相角とを測定する。これらの測定値に基づき、適切なRFパラメータが、DSP補償器ボード230によって計算される。限定を意味しないが、これらのパラメータには、次が含まれる。すなわち、インピーダンス・ベクトルz(上にベクトルを意味するバー付き)、アドミタンス・ベクトルy(同じく上にバー付き)、搬送された電力Pdel、電圧定在波比(「VSWR」)である。DSP補償器ボードの典型的な動作には、高速バス・コントローラ212による電力設定点、電力増幅器ドライバ222によるRF電力周波数設定点、電子マッチング・コントローラ252によるスイッチング周波数などが含まれる。
【0019】
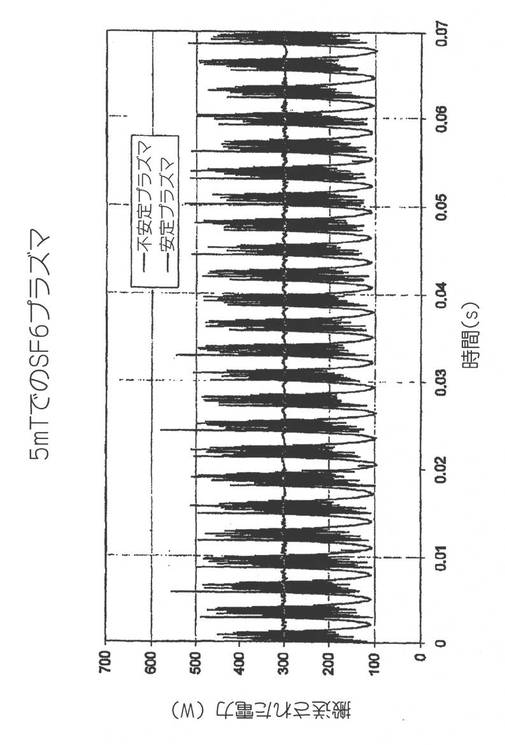
ある1つの特徴では、システム200は、同時的な電力及びインピーダンスの調整を達成する。独立のサセプタンス調整により、コンダクタンス設定点からのコンダクタンスの偏差にのみ基づいた周波数制御アルゴリズムのインプリメンテーションが可能になる。その結果として、両方の制御ループの同時的かつ高速での動作が可能になり、ロバスト性が向上する。更に、低圧(例えば、図3に示されているように、5mT及び300WにおけるSF6)での負の電荷を持ったプラズマに関する広く知られた不安定性を、高速DCバス210での動作について任意のコンダクタンス及びサセプタンス設定点を設定することにより、安定化させることが可能になる。
【0020】
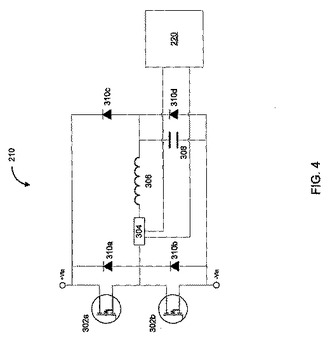
図4は、部分共振インバータ電源型の高速DCバス210のダイアグラムである。この高速DCバス210は、関連する一定電力開ループ応答により、プロセス安定性を提供する。高速DCバス210は負荷空間におけるFETの利用を向上させることにより、同じPA220(図2)を用いて、負荷により多くの電力を搬送する。高速DCバス210は高速応答速度を有し、それによって、プラズマへより多くの電力を搬送することが可能になり、よって、バス電圧を低下させる柔軟性によりPA220上のFETがセーフ・モードで動作することが保証される。高速DCバス210には、他のタイプのトポロジを用いることも可能である。例えば、継続中の一部継続出願である2004年9月22日に出願された親出願である米国特許出願第10/947,397を参照のこと。この米国出願はその全体を本出願において援用する。
【0021】
ある1つの実施例では、高速DCバスは、1対のスイッチ(MOSFET)302a及び302bと、インダクタ(L)306と、キャパシタ(C)308と、4つのダイオード310a、310b、310cおよび310dとを含む部分共振インバータ210でありうる。動作においては、部分共振インバータ300は、入力電圧を方形波又は他の既知のタイプのDC波形に変換する。方形波は、組み合わされてLCフィルタを形成するインダクタ306及びキャパシタ308を通過し、ダイオードによって310c及び301dによってクランプされ、変圧器整流子304によって結合及び整流され、フィルタリングがなされて、所望のDC電圧(電力設定点)が得られる。DC電力設定点は、DSP補償器ボード230(図2)から提供される。所望のインピーダンス設定点は、そのベクトル逆数(アドミタンスと称される)を用いて特定され、コンダクタンスを任意のコンダクタンス設定点への、そして、サセプタンスを任意のサセプタンス設定点への同時的な調整がなされる。部分共振インバータ300(DC−DCコンバータ)の出力は、RF電力生成器/増幅器220のDC入力に接続される。
【0022】
動作においては、キャパシタ308は、入力レール電圧(+Vin)に周期的に充電され、キャパシタ電流がプラズマ負荷260(FIG.2)を流れる間は放電される。すべての充電又は放電サイクルでも、抵抗性負荷におけるエネルギは、負荷の抵抗値とは無関係に、CV2/2に等しい。従って、電力は、FSWxCV2/2に等しい。ここで、Fswはスイッチング周波数であり、Vは入力電圧である。インダクタ306は、キャパシタ308が有限の時間で完全に充電及び放電されることを保証する。この部分共振インバータ300設計の利点としては、VとFswとの少なくとも一方を変動させることによって出力電圧を制御できる点にある。
【0023】
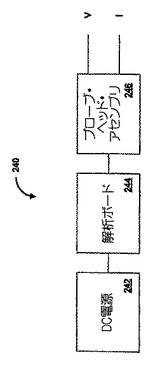
図5は、RFインピーダンス・アナライザ又はVIプローブ240の1つの実施例のダイアグラムである。VIプローブ240は、DC電源242と、アナライザ・ボード・アセンブリ244と、プローブ・ヘッド・アセンブリ246とを含む。アナライザ・ボード・アセンブリ244は、プローブ・ヘッド・アセンブリ246から低レベルのRFシグナルを受け取る。プローブ・ヘッド・アセンブリ246は、2つの電圧出力を提供する。すなわち、1)プローブ・ヘッド・アセンブリ246に存在する時間変動する電場の電圧表現(電圧信号)と、2)プローブ・ヘッド・アセンブリ246に存在する時間変動する磁場の電圧表現(電流信号)とである。アナライザ・ボード・アセンブリ244は、プローブ・ヘッド・アセンブリ246の2つの電圧出力を受け取り処理して、DSP補償器ボード230(FIG.2)にRFパラメータを出力する。MKSインスツルメンツ社によるVIプローブ4100及びVIプローブ350は、この目的に使用することができる例示的なアナライザである。
【0024】
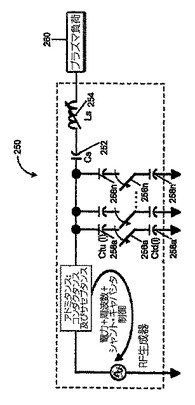
図6は、電子マッチング・ネットワーク250の1つの実施例のダイアグラムである。ある実施例では、電子マッチング・ネットワーク250は、負荷260と直列のインダクタンス254(例えば、複数のタップ・ポイントを有するコンパクトなインダクタ)と、固定又は可変の直列パディング・キャパシタ252と、1又は複数の上側のキャパシタCm(i)258a・・・258nをグランドに終端されており対応する下側のキャパシタCtd(i)258a’・・・258n’に切り換える電界効果トランジスタ(「FET」)256a・・・256nとを含む。実施例によっては、電子マッチング・ネットワーク250は、負荷260と直列のインダクタンスは含まない。これ以外のタイプの電子マッチング・ネットワークを用いることもできる。それについては、米国特許第6,887,339号を参照のこと。この米国特許の全体をこの出願において援用する。
【0025】
図7は、DSP補償器ボード230のモジュール・ベースのダイアグラムを示す。DSP補償器ボード230は、デジタル信号プロセッサ(「DSP」)とフィールドプログラマブルゲートアレイ(「FPGA」)との両方を組み込んでおり、共に、集積システム200の全体を制御する。DSP補償器ボードは、アドミタンス補償モジュール232と、周波数制御モジュール234と、電子マッチング制御モジュール236と、RF電力計算モジュール237と、RF電力制御モジュール238とを含む。一般に、DSP補償器ボードはVPのプローブ240からの出力を受け取る。アドミタンス計算モジュール232は、VIプローブ出力を用いて、システム200のアドミタンスを計算する。周波数制御モジュール234は、アドミタンスを用いて、電力増幅器220の周波数を変動させる。電子マッチング制御モジュール236は、アドミタンスを用いて、電子マッチング・ネットワーク250のFET256をオン・オフに切り換える。RF電力計算モジュール237は、VIプローブ出力を用いて、システム200のRF電力を計算する。RF電力制御モジュール234は、RF電力計算を用いて、高速DCバス電力210から供給される動力を調節する。システム200の動作に関する詳述について以下で述べる。
【0026】
電源調節の目的及びアルゴリズムの1つの実施例について、以下で述べる。目的は、搬送される電力Pdelをユーザが定義する設定点Pspに調節することである。滑らかな移行を保証するため、軌道生成器(trajectory generators)が用いられる。1つの実施例では、第1次の軌道が、以下の数式1(EQN.1、以下同様)のように生成される。
【0027】
【数1】
ここで、τtは軌道時定数であり、Ptは所望の電力軌道である。搬送電力制御アルゴリズムは、高速バスに命令される電力の変化に関し、次の数式2の関係によって与えられる。
【0028】
【数2】
ここで、kpとkiとは、それぞれ、比例ゲインと積分ゲインとである。
【0029】
次に、アドミタンス調節の目的について述べる。正規化されたアドミタンス・ベクトルは、y=g+jbによって定義される。ただし、左辺のyの上にはバー(−)が付されている。この日本語訳では、入力の関係で単にyと書かれている。gは正規化されたコンダクタンスであり、bは正規化されたサセプタンスである。インピーダンス・マッチング制御の目的は、次のように定式化される。すなわち、g−>gsp及びb−>bspとする。ただし、ここで、gsp及びbspはプラズマの安定性を向上させるように選択された任意の設定点である。上述した目的は、次の数式3のようにインピーダンスはアドミタンスの逆数として定義されることに注意すると、インピーダンスによって表現することも可能である。
【0030】
【数3】
ただし、zは正規化されたインピーダンスであり、r及びxはそれぞれが抵抗値とリアクタンスであり、Z0=R0+j0はノミナルなRF増幅器の特性インピーダンスを表す。これから、g−>1及びb−>0のときには、R−>R0及びX−>0となる。
【0031】
次は、アドミタンス調節アルゴリズムである。周波数制御ループは、例えば次の数式4によるPI制御アルゴリズムとして、コンダクタンス測定値を用いることによって設計される。
【0032】
【数4】
ここで、kpf及びkifは、スカラ比例ゲインと積分制御ゲインとである。シャント・キャパシタンス制御ループは、例えば次の数式5のPI制御アルゴリズムとして、コンダクタンス測定値を用いることによって設計される。
【0033】
【数5】
ここで、kpc及びkicは、スカラ比例ゲインと積分制御ゲインとである。
【0034】
動作においては、図2、3及び6を参照すると、ユーザが0でない設定点を提供した後で、軌道生成器と電力及びアドミタンス制御アルゴリズムとが同時に付勢され実行される。VIプローブ240は、RF電圧とRF電流とに比例するアナログ信号を提供し、これはアナログ・デジタル変換器によって同期してサンプリングされ、ミキサとCICフィルタ(図示せず)とに送られ、最終的には、較正行列を介して、次の数式6によって与えられる関係によるRF電圧及びRF電流測定値が生じる。
【0035】
【数6】
ここで、V及びI(実際はV及びIの上にバーが付いている)は、瞬時値のRF電圧及び電流のベクトル表現であり、添字のr及びIは実部及び虚部のスカラ値を示すのに用いられている。
【0036】
平均の搬送電力は、次の数式7によって計算される。
【0037】
【数7】
ここで、Re{}はベクトルの実部を表し、上付きの*はベクトルの複素共役を示すのに用いられている。
【0038】
アドミタンス・ベクトルY(Yの上にバー付き)は次の数式8のように計算される。
【0039】
【数8】
ここで、コンダクタンスG及びサセプタンスBは、アドミタンスY(上にバー付き)の実部及び虚部である。
【0040】
正規化されたコンダクタンスgと正規化されたサセプタンスbとは、次の数式9によって計算される。
【0041】
【数9】
ここでz0は、RF増幅器の特性インピーダンスを示している。Pdel、g、bの測定値は、それぞれが、Pcmd、fcmd、Ctcmdに対する制御アルゴリズムに設定される。
【0042】
電子マッチング・コントローラ252は、シャント・キャパシタ258を切り換えることによりFET256(図6)を切り換え、電力増幅器20と動的負荷260との間のインピーダンスと一致する。機械的な部材が不在であるから、より高い信頼性が得られることになる。1つの実施例では、応答速度が機械的な応答ではなく電子的に制御されているから、システム200のステップ応答は約1ミリ秒(ms)よりも高速である。
【0043】
周波数が変化する結果として、コンダクタンスとサセプタンスとの両方に変化が生じる。しかし、伝送線路ケーブルが存在しないこの一体化されたシステムでは、シャント・キャパシタンスの変化はサセプタンスの変化にのみ帰着し、コンダクタンス値には影響しない。従って、制御対象である変数ベクトル(アドミタンスの実部及び虚部によって定式化される)と制御する側の変数ベクトル(シャント及び直列キャパシタンス又はシャント及び周波数によって定式化される)とを関連付ける行列は三角行列である。その結果、独立したサセプタンス調節が、シャント・キャパシタンスを変動させることによって達成される。
【0044】
独立のサセプタンス調節は、コンダクタンス設定点からのコンダクタンスの偏差にのみ基づく周波数制御アルゴリズムのインプリメンテーションを可能にする。その結果、コンダクタンス・ベースの周波数制御ループとサセプタンス・ベースのシャント・キャパシタンス制御ループとの両方が、同時かつ高速で動作可能であり、その結果として、ロバストネスが向上する。
【0045】
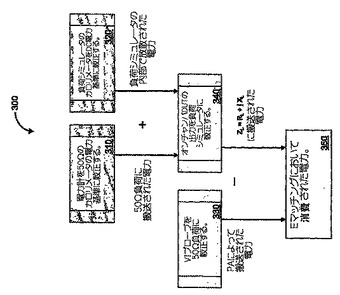
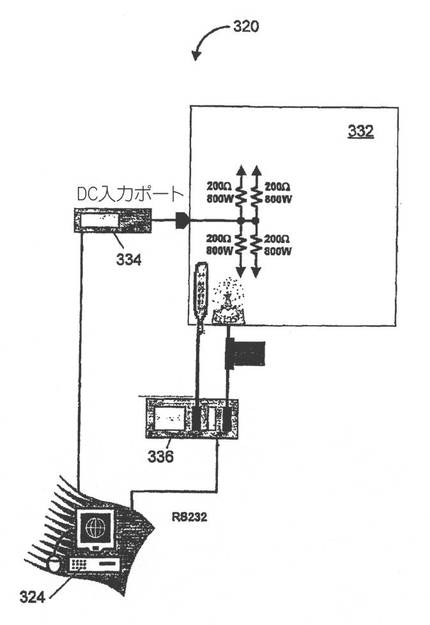
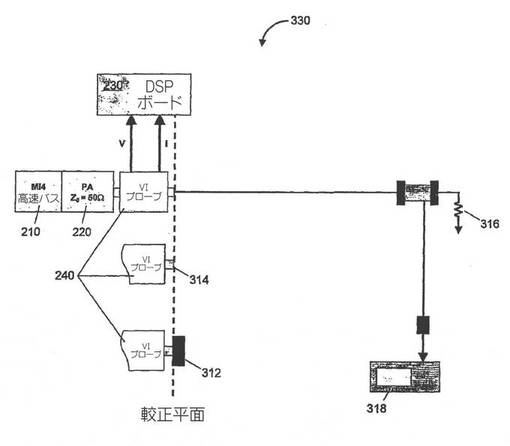
図8は、電子マッチング・ネットワーク250(図2)において消費される(損失する)電力を決定してシステム200の効率を改善する方法のブロック図300である。ステップ1(310)では、電力計314(図9A)が50Ωの熱量計基準に較正され、この50Ωの負荷に搬送される電力が決定される。ステップ2(320)では、負荷シミュレータ熱量計332(図9B)がDC電力基準に較正され、負荷シミュレータ342(図9D)の内部で消費される電力が決定される。ステップ3(330)では、VIプローブ240(図2)が50Ωの負荷に較正され、電力増幅器220(図2)によって搬送される電力が決定される。ステップ4(340)では、システム200の出力が負荷シミュレーター342に較正され、ZL=RL+jXLに搬送される電力が決定される。ステップ5(350)では、電子マッチングシステムにおいて消費される電力は、電力増幅器220によって搬送される電力とZL=RL+jXLに搬送される電力との差によって計算される。
【0046】
図9Aは、電力計314を測定するステップ310の詳細なインプリメンテーション・ダイアグラムである。熱量計322はVIプローブ240の出力に結合されており、RF電力は電力増幅器220から与えられ、電力計314が較正される。熱量測定は熱損失の測定値である。これは、熱量計(322)における50Ωの負荷を熱的に絶縁して周囲の熱損失を防止し、冷却水の流率及び温度上昇を測定することによりインプリメントされる。電力計は、Q=(dm/dt)C(Tout−Tin)によって計算される負荷における電力消費に較正される。ここで、dm/dtは質量流率、Cは水の比熱、Tin及びToutは入口及び出口の温度を表す。コンピュータ324は、流量と温度測定値とを得て、電力計の読み出しに関して、負荷における電力消費と差(誤差)とを計算する。コンピュータは、次に、この誤差を電力計への訂正として適用し、較正を完了する。
【0047】
図9Bは、負荷シミュレータ熱量計332を較正するステップ320の詳細なインプリメンテーション・ダイアグラムである。負荷シミュレータ熱量計332は、DC電源334に結合され、DC電力が印加され、負荷シミュレータ熱量計332が較正される。DC電源は、DC電力測定値を提供する。冷却システムの入口及び出口の流率及び温度測定値を用いて、コンピュータ324は、負荷シミュレータにおいて消費される電力を計算する。次に、コンピュータ324は、DC電源によって報告される電力と、熱量測定(calorimetry)を用いて計算される電力との間の誤差を負荷シミュレータへの訂正として適用し、較正を完了する。
【0048】
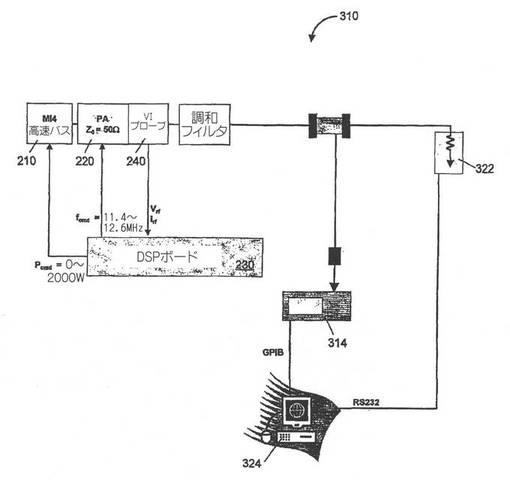
図9Cは、RFインピーダンス・アナライザ又はVIプローブ240を較正するステップ330の詳細なインプリメンテーション・ダイアグラムである。一般に、それぞれの一体化された高周波生成システム200でのVIプローブ240の較正は、VIプローブ電圧とDSP補償器ボード230によって測定される電流とを実際のRF線の電圧及び電流と関係付ける行列伝達関数を生じる下記のステップを含む。
【0049】
第1に、短絡回路コネクタ312が、VIプローブ240のRF回線出力端子に結合され、RF電力が電力増幅器220から印加され、Zdspscが計算される。ここで、Zdspscは、DSP補償器ボード230によって短絡回路に関して測定されるVdsp/Idspの比率として定義される。第2に、開放回路コネクタ314はVIプローブ240のRF回線出力端子に結合され、RF電力が電力増幅器220から印加され、Zdspocが開放回路に関してDSP補償器ボードによって測定されるVdsp/Idspとして定義される。第3に、50Ωの負荷が316はVIプローブ240の出力に結合され、RF電力が電力増幅器220から印加され、Vm及びImが記録され、RF回線電圧電圧VLが計算される。ここで、VL=(PLZL)1/2である。PLは、50Ωの負荷316における電力計318によって測定される搬送電力である。最後に、VIプローブ較正行列伝達関数は、次の数式10によって計算される。
【0050】
【数10】
方程式10における表現は、VIプローブ測定値信号を、VIプローブ240の出力におけるRF回線電圧とRF回線電流とに変換する。
【0051】
図9Dは、システム200(図2)を較正するステップ340に関する詳細なインプリメンテーション・ダイアグラムである。システム・レベルの較正が用いられ、値マッチング・ネットワーク変数の範囲に関して、電子マッチング・ネットワーク250における電力損失を数量化する。典型的には、負荷シミュレータ342は、電子マッチング・ネットワーク250とは逆数の関係にある電子マッチング・ネットワークである。50Ωの負荷が負荷シミュレータ342の出力に結合される。RF生成システム200のシステム・レベルの較正は、以下のように行なわれる。第1に、直列のインダクタンスが、範囲[Lsmin,Lsmax]に含まれるLsに対するllステップにおいて調整される。第2に、電力設定点の値は、[Pspmin,Pspmax]Wに含まれるppステップであるPspにおいて変更される。第3に、シャント・キャパシタンス設定点の値は、範囲[Ctcmdmin,Ctcmdmax]に含まれるccステップにおいて変更される。最後に、RF周波数の値は、範囲[fmin,fmax]Hzに含まれるffステップであるfにおいて変更される。
【0052】
上述したステップのそれぞれの組合せについて、負荷シミュレータ342は、電子マッチング・ネットワーク250の出力においてインピーダンス不整合を示すように設定される。次に、RF電力が電力増幅器220から印加され、電力計314は終端負荷312の抵抗値を測定する。この終端負荷抵抗値は、P50Ωによって表し、負荷シミュレータ342の入力に変換される。シミュレートされた負荷は、Psys=f50−to−sim(P50Ω,C1,C2)によって表す。ここで、C1及びC2は負荷シミュレータの直列及びシャント・キャパシタンスである。f50−to−simは平面上の構成を表す。電子マッチング・ネットワーク250において関連付けられる損失は、PLとP50Ωとの間の差によって計算される。
【0053】
いくつかの実施例では、llxppxccxffの大きさを有する較正テーブルが、Psys=fVI−to−sim(Ls,Psp,Ctcmd,f)として不揮発性メモリ(例えばフラッシュ・メモリ)に記憶される。ここで、fVI−to−simは平面上の構成を表す。高速リアルタイム制御ループのために、システム200の動作中に、較正テーブルの中の高速サーチが必要となる。不揮発性メモリ(例えばフラッシュ・メモリ)は揮発性メモリ(例えばダイナミックRAM)より低速な傾向を有する。高速の揮発性メモリが効果的に用いられる。ここで、較正テーブル(llxppxccxffの大きさ)の構成は、どれくらいの頻度でLs、Psp、Ctcmd及びfが/変更されるかに依存する。特に、この較正テーブルはllのメモリ・ブロックに分割が可能であり、それぞれのブロックはppのメモリ・ページを含み、それぞれのメモリ・ページはccxffの大きさのテーブルを含む。Lsが変更されると新たなメモリ・ブロックを不揮発性メモリの中のロードすることが可能であり、電力設定点が変更されると新たなメモリ・ページのロードが可能であり、Ctcmd及びfと関連する適切なメモリ・ページに対する較正点をリアルタイムで拡張することが可能である。
【0054】
以上では、本発明をその好適実施例を参照しながら示し説明したが、この技術分野の当業者であれば、特許請求の範囲によって画定される本発明の範囲から逸脱することなく形態及び詳細において様々な変更をなすことが可能であることを理解するはずである。
【図面の簡単な説明】
【0055】
【図1A】図1Aは、従来技術による2軸同調可能マッチング・ネットワークを有するRF電力搬送システムの図である。
【図1B】図1Bは、従来技術による固定型マッチング・ネットワークを有するRF電力搬送システムの図である。
【図1C】図1Cは、従来技術による一体型のRF発電機インピーダンス・マッチング・ネットワークを有するRF電力搬送システムの図である。
【図2】オンチャンバRF電力搬送システムのモジュール・ベースの図である。
【図3】プラズマ安定性グラフである。
【図4】図2の高速DCバスの1つの実施例である。
【図5】図2のVIプローブのRFインピーダンス・アナライザの1つの実施例である。
【図6】図2の電子的マッチング・ネットワークの1つの実施例である。
【図7】図2のDSP補償器ボードのモジュール・ベースの図の1つの実施例である。
【図8】オンチャンバRF電力搬送システムを較正するブロック図である。
【図9A】電力計を50Ωの熱量計電力基準に較正する1つの実施例である。
【図9B】負荷シミュレータをDC電力基準に較正する1つの実施例である。
【図9C】RFインピーダンス・アナライザを50Ωの負荷に較正する1つの実施例である。
【図9D】負荷シミュレータに搬送される電力を較正する1つの実施例である。
【技術分野及び背景技術】
【0001】
動的負荷にRF電力を供給するには、様々なアプローチが存在する。RF生成器は、約400kHzから約200MHzまで周波数で動的負荷に電力を典型的に供給する。科学、産業及び医療において用いられる周波数は、約2MHz、13.56MHz及び27MHzである。
【0002】
図1Aに示されているように、動的負荷(つまりプラズマ負荷140)にRF電力を提供するあるシステム100は、固定周波数RF生成器110と、50Ωの伝送線路130によって接続されている2軸型調整可能マッチング・ネットワーク120とを含む。調整可能なマッチング・ネットワーク120は、直列の電動真空可変キャパシタ122と、インダクタ124と、シャント型の電動真空バリコン126とを含む。直列及びシャント・キャパシタンスを決定するのに用いられるアルゴリズムは、振幅及び位相検出器150を用いてなされるのが通常であるインピーダンス測定値に基づく。独立的な電力制御は、RF生成器110における電力測定値に基づいている。電力制御ループ160とインピーダンス制御ループ162とは独立している。
【0003】
図1Bで示されているように、RF電力を動的負荷に提供する別のシステム100’は、RF生成器110によって給電され50Ωの伝送線路130によって接続される固定要素型のマッチング・ネットワーク120’を含む。固定要素型のマッチング・ネットワーク’120は、直列コンデンサ122とインダクタ124とシャント・キャパシタ126とを含んでいる。RF生成器110の周波数は、ある範囲(例えば、13.56MHz+−5%)に調整することができる。RF生成器110の周波数コマンドは、電圧定在波比(VSWR)の値に基づく。独立した電力ループ及びVSWR(インピーダンス)制御ループ160’は、RF生成器110の出力での測定値に基づく。
図1Cに示されているように、動的負荷にRF電力を供給する別のシステム100”は、一体化されたRF生成器インピーダンス・マッチング・ネットワークを120”含む。このRF生成器インピーダンス・マッチング・ネットワーク120”は、直列キャパシタ122と、インダクタ124と、複数のシャント・キャパシタ126a・・・126nとを含む。シャント・キャパシタ126a...126nは、これらのキャパシタ126をグランドに結合しグラウンドから切断するスイッチング回路127aに結合されている。システム100”の電源制御と周波数制御160”とは、同時に導通することはない。
【発明の概要】
【0004】
従来の技術及び方法には欠点が。従来型の技術及び方法では、伝送線路を介して接続される少なくとも2つの必要なモジュールである1)RF生成器/増幅器と2)インピーダンス・マッチング・ネットワークとに起因して、高コストになりがちである。更に、それぞれのモジュールに、RF電圧/電流センサ又は振幅/位相検出器が必要になる。
【0005】
プラズマ・インピーダンスは、プラズマに搬送される電力の関数である。更に、RF生成器によって搬送される電力は、この生成器から見たインピーダンスの関数である。その結果として、搬送される電力と負荷インピーダンスとの間には循環的な相互依存が明確に存在し、よって、クロスカップリングを備えたマルチ入力マルチ出力(MIMO)システムが生じる。従来型のシステムでは、RF生成器制御ループとインピーダンス・マッチング制御ループとは独立であるから、電力制御とインピーダンス・マッチング制御ループとの間のクロスカップリングを補償することができない。これにより、閉ループの低いパフォーマンスが生じてしまう。
【0006】
任意の制御対象となるシステムの動的応答は、最も低速の機能モジュール(センサ、アクチュエータ、制御システム・パラメータなど)と同じくらいでしかない。従来型のシステムでは、最も低速の機能モジュールは、DC電源であるのが典型的である。具体的には、RF電力増幅器の入力に供給されたDC電力は、通常は、高周波化をフィルタリングするのに用いられる大きな電解キャパシタを含む。そのようなフィルタ・ネットワークを用いることに伴う短所は、動的応答(例えば、電力コマンドのステップ変化に対する応答)が、制御更新速度とは無関係に低速であることである。よって、そのようなシステムではプラズマの不安定性を十分に補償できない。
【0007】
モータによって駆動される真空キャパシタを使用するシステムでは、応答時間は数百ミリ秒のオーダーである。考察対象であるプラズマ過渡現象(インピーダンスの突然で迅速な変更)が数百マイクロ秒の間に生じるから、真空キャパシタはプラズマ過渡現象に起因する負荷変動と一致するためには使えない。
【0008】
従来用いられるマッチング・ネットワークの制御アルゴリズムは、測定されたインピーダンスの実部及び虚部に依存している。インピーダンス測定ベースのマッチング制御は、内在的な欠点を有する。例えば、インピーダンスの実部を訂正又は修正するシャント・キャパシタンスが変化すると、その結果、インピーダンスの虚部に望ましくない変化が生じてしまう。同様に、インピーダンスの虚部を訂正又は修正する直列キャパシタンス又は周波数が変化すると、その結果、インピーダンスの実部に望ましくない変化が生じる。制御対象である変数ベクトル(インピーダンスの実部及び虚部によって定式化される)と制御する側の変数ベクトル(シャント及び直列キャパシタンス又はシャント・キャパシタンス及び周波数とによって定式化される)とを関連付ける行列は、対角行列ではない。よって、インピーダンス測定値ベースの制御アルゴリズムは有効ではない。インピーダンスの振幅及び位相測定値を用いて定式化されるインピーダンス・ベースの制御アルゴリズムも同様に有効ではない。
【0009】
従来技術のための較正方法は、RFRFインピーダンス・アナライザ又はVIプローブを較正する。これらの較正方法では、電子マッチング・ネットワークにおける電力損失は電子マッチング・ネットワークのすべての状態と動作周波数とについて固定されていると仮定している。しかし、電子マッチングネットワークの損失は、システム全体の動作に大きく影響する。
【0010】
したがって、動的プラズマ負荷に供給される電力とそれと関連付けられる損失とを制御する改善された方法及びシステムに対する必要性が存在している。
【0011】
電力を動的負荷に搬送するシステムが提供される。このシステムは、実質的に一定の電力開ループ応答を有するDC電力を提供する電源と、前記DC電力をRF電力に変換する電力増幅器と、電圧と電流と前記RF電力に関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とを測定するセンサと、動的負荷のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正する電気的に制御可能なインピーダンス・マッチング・システムと、前記電気的に制御可能なインピーダンス・マッチング・システムを制御するコントローラと、を備えている。このシステムは、更に、前記電力増幅器によって搬送される電力を決定するセンサ較正測定モジュールと、動的負荷に搬送される電力を決定する電子的マッチング・システム較正モジュールと、前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算する電力消費モジュールと、を更に備えている。
【0012】
ある実施例では、前記電気的に制御可能なインピーダンス・マッチング・システムは、インダクタと、前記インダクタと直列のキャパシタと、前記動的負荷と並列の複数の切換型キャパシタとを含むことがある、前記インダクタは、マルチタップ型のインダクタ又は可変型のインダクタでありうる。前記複数の切換型キャパシタは、それぞれが、スイッチ及び追加的なキャパシタと直列でありうる。別の実施例では、前記電気的に制御可能なインピーダンス・マッチング・システムは、キャパシタと、前記動的負荷と並列である複数の切換型キャパシタとを含んでおり、前記複数のキャパシタはそれぞれがスイッチ及び追加的なキャパシタと直列でありうる。更に別の実施例では、前記電気的に制御可能なインピーダンス・マッチング・システムは、前記電力増幅器と前記動的負荷との間のインピーダンス・マッチングの周波数を制御することができる。
【0013】
ある実施例では、前記前記コントローラは、前記電気的に制御可能なインピーダンス・マッチング・システムを制御して、前記電力増幅器と前記動的負荷との間のインピーダンスに関連付けられたコンダクタンスとサセプタンスとを同時に制御することができる。別の実施例では、前記コントローラは、RF電力周波数とRF電力振幅と前記電力増幅器と前記動的負荷との間のインピーダンスとを同時に制御することができる。更に別の実施例では、前記コントローラは、前記電気的に制御可能なインピーダンス・マッチング・システムを制御し、不安定な動的負荷を安定化する設定点にコンダクタンスとサセプタンスとを調節することができる。
【0014】
前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力は前記電力増幅器によって搬送される電力と前記動的負荷に搬送される電力との差である。前記動的負荷に搬送される電力は、抵抗性負荷に搬送される電力と前記負荷シミュレータの内部で消費される電力との和である。
【0015】
前記センサ較正測定モジュールは、前記センサを抵抗性負荷に較正する。ここで、前記抵抗性負荷は50Ωである。前記電子的マッチング・システム較正モジュールは、前記電気的に制御可能なインピーダンス・マッチング・システムの出力を負荷シミュレータに較正する。前記負荷シミュレータは、逆の(inverse)電気的に制御可能なインピーダンス・マッチング・システムでありうる。前記電子的マッチング・システム較正モジュールは、抵抗性負荷に搬送される電力を決定する電力計較正モジュールと、前記負荷シミュレータにおいて消費される電力を決定する負荷シミュレータ較正モジュールとを含みうる。前記抵抗性負荷は、50Ωでありうる。このRF周波数電力搬送システムは、従来型のシステムと比較すると、少なくとも以下の長所を有する。すなわち、このシステムでは、高速(例えば、ある実施例では、50kHzを超える)のデジタル・マルチ入力マルチ出力(MIMO)制御を用いて、電力設定点の調整、インピーダンス・マッチング、そして、負荷外乱の緩和が提供される。このシステムは、プラズマ負荷特性に過渡的な変化が存在するときや、高速プラズマ安定化を含む条件下でも動作可能である。このシステムは、システム自体の始動時の過渡現象に対してロバストなRF電力搬送システムを提供することができる。このシステムは、高い電力ステップアップ比を提供する。ここで、この高い電力ステップアップ比は100(例えば、15Wから1500Wまで)である。このシステムは、一体型の発電機システム(generator system)の出力に接続された負荷に搬送される電力を測定することができる。このシステムは、制御対象である様々な変数の状態/値と関連する電力損失の変動とは無関係な電力の調整が可能である。このシステムでは、プラズマ負荷のためのレシピ・ベースの較正を不要にすることができる。
【発明を実施するための最良の形態】
【0016】
本発明の以上の及びそれ以外の目的、特徴及び効果は、添付の図面に図解されている本発明の好適実施例に関する以下のより特定の説明から明らかになる。添付の図面は必ずしも寸法通りではなく、むしろ本発明の原理を図解することが強調されている。
【0017】
一般的に言えば、一体化された無線周波数(RF)電力搬送システムが、動的負荷(例えば、誘導性及び/又は容量性プラズマ負荷)への適用のために提供される。図2は、一体化された無線周波数(RF)電力運搬システム200の図解である。この一体化されたシステム200の代表的な機能モジュールは、高速DCバス210と、RF電力増幅器(「PA」)220と、デジタル信号プロセッサ(「DSP」)補償器ボード230と、RFインピーダンス・アナライザ又はVIプローブ240と、電子マッチング・ネットワーク250とを含む。システム200は、プラズマ負荷に結合される。この技術分野の当業者であれば理解することであるが、この一体化されたシステム200は広範囲の抵抗性及び無効負荷に関して実現可能である。
【0018】
一般に、高速DCバス210は、電力増幅器220にDC電力を搬送する。電力増幅器220は、高速DCバス210からのDC電力を、ある周波数を有するRF電力に変換する。電子マッチングシステム250は、シャント・キャパシタ(図示せず)を切り換えることにより、電力増幅器220とプラズマ負荷260との間のインピーダンスと一致させて、電力増幅器220からプラズマ負荷260までの安定的で最大の電力転送を容易にする。DSP補償器ボード230は、高速バス・コントローラ212とRFインピーダンス・アナライザ240とから受け取られた測定値に基づいて、システム200の動作を制御する。RFインピーダンス・アナライザ240は、RMS電圧と、RMS電流と、RF電圧ベクトルとRF電流ベクトルとの間の位相角とを測定する。これらの測定値に基づき、適切なRFパラメータが、DSP補償器ボード230によって計算される。限定を意味しないが、これらのパラメータには、次が含まれる。すなわち、インピーダンス・ベクトルz(上にベクトルを意味するバー付き)、アドミタンス・ベクトルy(同じく上にバー付き)、搬送された電力Pdel、電圧定在波比(「VSWR」)である。DSP補償器ボードの典型的な動作には、高速バス・コントローラ212による電力設定点、電力増幅器ドライバ222によるRF電力周波数設定点、電子マッチング・コントローラ252によるスイッチング周波数などが含まれる。
【0019】
ある1つの特徴では、システム200は、同時的な電力及びインピーダンスの調整を達成する。独立のサセプタンス調整により、コンダクタンス設定点からのコンダクタンスの偏差にのみ基づいた周波数制御アルゴリズムのインプリメンテーションが可能になる。その結果として、両方の制御ループの同時的かつ高速での動作が可能になり、ロバスト性が向上する。更に、低圧(例えば、図3に示されているように、5mT及び300WにおけるSF6)での負の電荷を持ったプラズマに関する広く知られた不安定性を、高速DCバス210での動作について任意のコンダクタンス及びサセプタンス設定点を設定することにより、安定化させることが可能になる。
【0020】
図4は、部分共振インバータ電源型の高速DCバス210のダイアグラムである。この高速DCバス210は、関連する一定電力開ループ応答により、プロセス安定性を提供する。高速DCバス210は負荷空間におけるFETの利用を向上させることにより、同じPA220(図2)を用いて、負荷により多くの電力を搬送する。高速DCバス210は高速応答速度を有し、それによって、プラズマへより多くの電力を搬送することが可能になり、よって、バス電圧を低下させる柔軟性によりPA220上のFETがセーフ・モードで動作することが保証される。高速DCバス210には、他のタイプのトポロジを用いることも可能である。例えば、継続中の一部継続出願である2004年9月22日に出願された親出願である米国特許出願第10/947,397を参照のこと。この米国出願はその全体を本出願において援用する。
【0021】
ある1つの実施例では、高速DCバスは、1対のスイッチ(MOSFET)302a及び302bと、インダクタ(L)306と、キャパシタ(C)308と、4つのダイオード310a、310b、310cおよび310dとを含む部分共振インバータ210でありうる。動作においては、部分共振インバータ300は、入力電圧を方形波又は他の既知のタイプのDC波形に変換する。方形波は、組み合わされてLCフィルタを形成するインダクタ306及びキャパシタ308を通過し、ダイオードによって310c及び301dによってクランプされ、変圧器整流子304によって結合及び整流され、フィルタリングがなされて、所望のDC電圧(電力設定点)が得られる。DC電力設定点は、DSP補償器ボード230(図2)から提供される。所望のインピーダンス設定点は、そのベクトル逆数(アドミタンスと称される)を用いて特定され、コンダクタンスを任意のコンダクタンス設定点への、そして、サセプタンスを任意のサセプタンス設定点への同時的な調整がなされる。部分共振インバータ300(DC−DCコンバータ)の出力は、RF電力生成器/増幅器220のDC入力に接続される。
【0022】
動作においては、キャパシタ308は、入力レール電圧(+Vin)に周期的に充電され、キャパシタ電流がプラズマ負荷260(FIG.2)を流れる間は放電される。すべての充電又は放電サイクルでも、抵抗性負荷におけるエネルギは、負荷の抵抗値とは無関係に、CV2/2に等しい。従って、電力は、FSWxCV2/2に等しい。ここで、Fswはスイッチング周波数であり、Vは入力電圧である。インダクタ306は、キャパシタ308が有限の時間で完全に充電及び放電されることを保証する。この部分共振インバータ300設計の利点としては、VとFswとの少なくとも一方を変動させることによって出力電圧を制御できる点にある。
【0023】
図5は、RFインピーダンス・アナライザ又はVIプローブ240の1つの実施例のダイアグラムである。VIプローブ240は、DC電源242と、アナライザ・ボード・アセンブリ244と、プローブ・ヘッド・アセンブリ246とを含む。アナライザ・ボード・アセンブリ244は、プローブ・ヘッド・アセンブリ246から低レベルのRFシグナルを受け取る。プローブ・ヘッド・アセンブリ246は、2つの電圧出力を提供する。すなわち、1)プローブ・ヘッド・アセンブリ246に存在する時間変動する電場の電圧表現(電圧信号)と、2)プローブ・ヘッド・アセンブリ246に存在する時間変動する磁場の電圧表現(電流信号)とである。アナライザ・ボード・アセンブリ244は、プローブ・ヘッド・アセンブリ246の2つの電圧出力を受け取り処理して、DSP補償器ボード230(FIG.2)にRFパラメータを出力する。MKSインスツルメンツ社によるVIプローブ4100及びVIプローブ350は、この目的に使用することができる例示的なアナライザである。
【0024】
図6は、電子マッチング・ネットワーク250の1つの実施例のダイアグラムである。ある実施例では、電子マッチング・ネットワーク250は、負荷260と直列のインダクタンス254(例えば、複数のタップ・ポイントを有するコンパクトなインダクタ)と、固定又は可変の直列パディング・キャパシタ252と、1又は複数の上側のキャパシタCm(i)258a・・・258nをグランドに終端されており対応する下側のキャパシタCtd(i)258a’・・・258n’に切り換える電界効果トランジスタ(「FET」)256a・・・256nとを含む。実施例によっては、電子マッチング・ネットワーク250は、負荷260と直列のインダクタンスは含まない。これ以外のタイプの電子マッチング・ネットワークを用いることもできる。それについては、米国特許第6,887,339号を参照のこと。この米国特許の全体をこの出願において援用する。
【0025】
図7は、DSP補償器ボード230のモジュール・ベースのダイアグラムを示す。DSP補償器ボード230は、デジタル信号プロセッサ(「DSP」)とフィールドプログラマブルゲートアレイ(「FPGA」)との両方を組み込んでおり、共に、集積システム200の全体を制御する。DSP補償器ボードは、アドミタンス補償モジュール232と、周波数制御モジュール234と、電子マッチング制御モジュール236と、RF電力計算モジュール237と、RF電力制御モジュール238とを含む。一般に、DSP補償器ボードはVPのプローブ240からの出力を受け取る。アドミタンス計算モジュール232は、VIプローブ出力を用いて、システム200のアドミタンスを計算する。周波数制御モジュール234は、アドミタンスを用いて、電力増幅器220の周波数を変動させる。電子マッチング制御モジュール236は、アドミタンスを用いて、電子マッチング・ネットワーク250のFET256をオン・オフに切り換える。RF電力計算モジュール237は、VIプローブ出力を用いて、システム200のRF電力を計算する。RF電力制御モジュール234は、RF電力計算を用いて、高速DCバス電力210から供給される動力を調節する。システム200の動作に関する詳述について以下で述べる。
【0026】
電源調節の目的及びアルゴリズムの1つの実施例について、以下で述べる。目的は、搬送される電力Pdelをユーザが定義する設定点Pspに調節することである。滑らかな移行を保証するため、軌道生成器(trajectory generators)が用いられる。1つの実施例では、第1次の軌道が、以下の数式1(EQN.1、以下同様)のように生成される。
【0027】
【数1】
ここで、τtは軌道時定数であり、Ptは所望の電力軌道である。搬送電力制御アルゴリズムは、高速バスに命令される電力の変化に関し、次の数式2の関係によって与えられる。
【0028】
【数2】
ここで、kpとkiとは、それぞれ、比例ゲインと積分ゲインとである。
【0029】
次に、アドミタンス調節の目的について述べる。正規化されたアドミタンス・ベクトルは、y=g+jbによって定義される。ただし、左辺のyの上にはバー(−)が付されている。この日本語訳では、入力の関係で単にyと書かれている。gは正規化されたコンダクタンスであり、bは正規化されたサセプタンスである。インピーダンス・マッチング制御の目的は、次のように定式化される。すなわち、g−>gsp及びb−>bspとする。ただし、ここで、gsp及びbspはプラズマの安定性を向上させるように選択された任意の設定点である。上述した目的は、次の数式3のようにインピーダンスはアドミタンスの逆数として定義されることに注意すると、インピーダンスによって表現することも可能である。
【0030】
【数3】
ただし、zは正規化されたインピーダンスであり、r及びxはそれぞれが抵抗値とリアクタンスであり、Z0=R0+j0はノミナルなRF増幅器の特性インピーダンスを表す。これから、g−>1及びb−>0のときには、R−>R0及びX−>0となる。
【0031】
次は、アドミタンス調節アルゴリズムである。周波数制御ループは、例えば次の数式4によるPI制御アルゴリズムとして、コンダクタンス測定値を用いることによって設計される。
【0032】
【数4】
ここで、kpf及びkifは、スカラ比例ゲインと積分制御ゲインとである。シャント・キャパシタンス制御ループは、例えば次の数式5のPI制御アルゴリズムとして、コンダクタンス測定値を用いることによって設計される。
【0033】
【数5】
ここで、kpc及びkicは、スカラ比例ゲインと積分制御ゲインとである。
【0034】
動作においては、図2、3及び6を参照すると、ユーザが0でない設定点を提供した後で、軌道生成器と電力及びアドミタンス制御アルゴリズムとが同時に付勢され実行される。VIプローブ240は、RF電圧とRF電流とに比例するアナログ信号を提供し、これはアナログ・デジタル変換器によって同期してサンプリングされ、ミキサとCICフィルタ(図示せず)とに送られ、最終的には、較正行列を介して、次の数式6によって与えられる関係によるRF電圧及びRF電流測定値が生じる。
【0035】
【数6】
ここで、V及びI(実際はV及びIの上にバーが付いている)は、瞬時値のRF電圧及び電流のベクトル表現であり、添字のr及びIは実部及び虚部のスカラ値を示すのに用いられている。
【0036】
平均の搬送電力は、次の数式7によって計算される。
【0037】
【数7】
ここで、Re{}はベクトルの実部を表し、上付きの*はベクトルの複素共役を示すのに用いられている。
【0038】
アドミタンス・ベクトルY(Yの上にバー付き)は次の数式8のように計算される。
【0039】
【数8】
ここで、コンダクタンスG及びサセプタンスBは、アドミタンスY(上にバー付き)の実部及び虚部である。
【0040】
正規化されたコンダクタンスgと正規化されたサセプタンスbとは、次の数式9によって計算される。
【0041】
【数9】
ここでz0は、RF増幅器の特性インピーダンスを示している。Pdel、g、bの測定値は、それぞれが、Pcmd、fcmd、Ctcmdに対する制御アルゴリズムに設定される。
【0042】
電子マッチング・コントローラ252は、シャント・キャパシタ258を切り換えることによりFET256(図6)を切り換え、電力増幅器20と動的負荷260との間のインピーダンスと一致する。機械的な部材が不在であるから、より高い信頼性が得られることになる。1つの実施例では、応答速度が機械的な応答ではなく電子的に制御されているから、システム200のステップ応答は約1ミリ秒(ms)よりも高速である。
【0043】
周波数が変化する結果として、コンダクタンスとサセプタンスとの両方に変化が生じる。しかし、伝送線路ケーブルが存在しないこの一体化されたシステムでは、シャント・キャパシタンスの変化はサセプタンスの変化にのみ帰着し、コンダクタンス値には影響しない。従って、制御対象である変数ベクトル(アドミタンスの実部及び虚部によって定式化される)と制御する側の変数ベクトル(シャント及び直列キャパシタンス又はシャント及び周波数によって定式化される)とを関連付ける行列は三角行列である。その結果、独立したサセプタンス調節が、シャント・キャパシタンスを変動させることによって達成される。
【0044】
独立のサセプタンス調節は、コンダクタンス設定点からのコンダクタンスの偏差にのみ基づく周波数制御アルゴリズムのインプリメンテーションを可能にする。その結果、コンダクタンス・ベースの周波数制御ループとサセプタンス・ベースのシャント・キャパシタンス制御ループとの両方が、同時かつ高速で動作可能であり、その結果として、ロバストネスが向上する。
【0045】
図8は、電子マッチング・ネットワーク250(図2)において消費される(損失する)電力を決定してシステム200の効率を改善する方法のブロック図300である。ステップ1(310)では、電力計314(図9A)が50Ωの熱量計基準に較正され、この50Ωの負荷に搬送される電力が決定される。ステップ2(320)では、負荷シミュレータ熱量計332(図9B)がDC電力基準に較正され、負荷シミュレータ342(図9D)の内部で消費される電力が決定される。ステップ3(330)では、VIプローブ240(図2)が50Ωの負荷に較正され、電力増幅器220(図2)によって搬送される電力が決定される。ステップ4(340)では、システム200の出力が負荷シミュレーター342に較正され、ZL=RL+jXLに搬送される電力が決定される。ステップ5(350)では、電子マッチングシステムにおいて消費される電力は、電力増幅器220によって搬送される電力とZL=RL+jXLに搬送される電力との差によって計算される。
【0046】
図9Aは、電力計314を測定するステップ310の詳細なインプリメンテーション・ダイアグラムである。熱量計322はVIプローブ240の出力に結合されており、RF電力は電力増幅器220から与えられ、電力計314が較正される。熱量測定は熱損失の測定値である。これは、熱量計(322)における50Ωの負荷を熱的に絶縁して周囲の熱損失を防止し、冷却水の流率及び温度上昇を測定することによりインプリメントされる。電力計は、Q=(dm/dt)C(Tout−Tin)によって計算される負荷における電力消費に較正される。ここで、dm/dtは質量流率、Cは水の比熱、Tin及びToutは入口及び出口の温度を表す。コンピュータ324は、流量と温度測定値とを得て、電力計の読み出しに関して、負荷における電力消費と差(誤差)とを計算する。コンピュータは、次に、この誤差を電力計への訂正として適用し、較正を完了する。
【0047】
図9Bは、負荷シミュレータ熱量計332を較正するステップ320の詳細なインプリメンテーション・ダイアグラムである。負荷シミュレータ熱量計332は、DC電源334に結合され、DC電力が印加され、負荷シミュレータ熱量計332が較正される。DC電源は、DC電力測定値を提供する。冷却システムの入口及び出口の流率及び温度測定値を用いて、コンピュータ324は、負荷シミュレータにおいて消費される電力を計算する。次に、コンピュータ324は、DC電源によって報告される電力と、熱量測定(calorimetry)を用いて計算される電力との間の誤差を負荷シミュレータへの訂正として適用し、較正を完了する。
【0048】
図9Cは、RFインピーダンス・アナライザ又はVIプローブ240を較正するステップ330の詳細なインプリメンテーション・ダイアグラムである。一般に、それぞれの一体化された高周波生成システム200でのVIプローブ240の較正は、VIプローブ電圧とDSP補償器ボード230によって測定される電流とを実際のRF線の電圧及び電流と関係付ける行列伝達関数を生じる下記のステップを含む。
【0049】
第1に、短絡回路コネクタ312が、VIプローブ240のRF回線出力端子に結合され、RF電力が電力増幅器220から印加され、Zdspscが計算される。ここで、Zdspscは、DSP補償器ボード230によって短絡回路に関して測定されるVdsp/Idspの比率として定義される。第2に、開放回路コネクタ314はVIプローブ240のRF回線出力端子に結合され、RF電力が電力増幅器220から印加され、Zdspocが開放回路に関してDSP補償器ボードによって測定されるVdsp/Idspとして定義される。第3に、50Ωの負荷が316はVIプローブ240の出力に結合され、RF電力が電力増幅器220から印加され、Vm及びImが記録され、RF回線電圧電圧VLが計算される。ここで、VL=(PLZL)1/2である。PLは、50Ωの負荷316における電力計318によって測定される搬送電力である。最後に、VIプローブ較正行列伝達関数は、次の数式10によって計算される。
【0050】
【数10】
方程式10における表現は、VIプローブ測定値信号を、VIプローブ240の出力におけるRF回線電圧とRF回線電流とに変換する。
【0051】
図9Dは、システム200(図2)を較正するステップ340に関する詳細なインプリメンテーション・ダイアグラムである。システム・レベルの較正が用いられ、値マッチング・ネットワーク変数の範囲に関して、電子マッチング・ネットワーク250における電力損失を数量化する。典型的には、負荷シミュレータ342は、電子マッチング・ネットワーク250とは逆数の関係にある電子マッチング・ネットワークである。50Ωの負荷が負荷シミュレータ342の出力に結合される。RF生成システム200のシステム・レベルの較正は、以下のように行なわれる。第1に、直列のインダクタンスが、範囲[Lsmin,Lsmax]に含まれるLsに対するllステップにおいて調整される。第2に、電力設定点の値は、[Pspmin,Pspmax]Wに含まれるppステップであるPspにおいて変更される。第3に、シャント・キャパシタンス設定点の値は、範囲[Ctcmdmin,Ctcmdmax]に含まれるccステップにおいて変更される。最後に、RF周波数の値は、範囲[fmin,fmax]Hzに含まれるffステップであるfにおいて変更される。
【0052】
上述したステップのそれぞれの組合せについて、負荷シミュレータ342は、電子マッチング・ネットワーク250の出力においてインピーダンス不整合を示すように設定される。次に、RF電力が電力増幅器220から印加され、電力計314は終端負荷312の抵抗値を測定する。この終端負荷抵抗値は、P50Ωによって表し、負荷シミュレータ342の入力に変換される。シミュレートされた負荷は、Psys=f50−to−sim(P50Ω,C1,C2)によって表す。ここで、C1及びC2は負荷シミュレータの直列及びシャント・キャパシタンスである。f50−to−simは平面上の構成を表す。電子マッチング・ネットワーク250において関連付けられる損失は、PLとP50Ωとの間の差によって計算される。
【0053】
いくつかの実施例では、llxppxccxffの大きさを有する較正テーブルが、Psys=fVI−to−sim(Ls,Psp,Ctcmd,f)として不揮発性メモリ(例えばフラッシュ・メモリ)に記憶される。ここで、fVI−to−simは平面上の構成を表す。高速リアルタイム制御ループのために、システム200の動作中に、較正テーブルの中の高速サーチが必要となる。不揮発性メモリ(例えばフラッシュ・メモリ)は揮発性メモリ(例えばダイナミックRAM)より低速な傾向を有する。高速の揮発性メモリが効果的に用いられる。ここで、較正テーブル(llxppxccxffの大きさ)の構成は、どれくらいの頻度でLs、Psp、Ctcmd及びfが/変更されるかに依存する。特に、この較正テーブルはllのメモリ・ブロックに分割が可能であり、それぞれのブロックはppのメモリ・ページを含み、それぞれのメモリ・ページはccxffの大きさのテーブルを含む。Lsが変更されると新たなメモリ・ブロックを不揮発性メモリの中のロードすることが可能であり、電力設定点が変更されると新たなメモリ・ページのロードが可能であり、Ctcmd及びfと関連する適切なメモリ・ページに対する較正点をリアルタイムで拡張することが可能である。
【0054】
以上では、本発明をその好適実施例を参照しながら示し説明したが、この技術分野の当業者であれば、特許請求の範囲によって画定される本発明の範囲から逸脱することなく形態及び詳細において様々な変更をなすことが可能であることを理解するはずである。
【図面の簡単な説明】
【0055】
【図1A】図1Aは、従来技術による2軸同調可能マッチング・ネットワークを有するRF電力搬送システムの図である。
【図1B】図1Bは、従来技術による固定型マッチング・ネットワークを有するRF電力搬送システムの図である。
【図1C】図1Cは、従来技術による一体型のRF発電機インピーダンス・マッチング・ネットワークを有するRF電力搬送システムの図である。
【図2】オンチャンバRF電力搬送システムのモジュール・ベースの図である。
【図3】プラズマ安定性グラフである。
【図4】図2の高速DCバスの1つの実施例である。
【図5】図2のVIプローブのRFインピーダンス・アナライザの1つの実施例である。
【図6】図2の電子的マッチング・ネットワークの1つの実施例である。
【図7】図2のDSP補償器ボードのモジュール・ベースの図の1つの実施例である。
【図8】オンチャンバRF電力搬送システムを較正するブロック図である。
【図9A】電力計を50Ωの熱量計電力基準に較正する1つの実施例である。
【図9B】負荷シミュレータをDC電力基準に較正する1つの実施例である。
【図9C】RFインピーダンス・アナライザを50Ωの負荷に較正する1つの実施例である。
【図9D】負荷シミュレータに搬送される電力を較正する1つの実施例である。
【特許請求の範囲】
【請求項1】
電力を動的負荷に搬送するシステムであって、
実質的に一定の電力開ループ応答を有するDC電力を提供する電源と、
前記DC電力をRF電力に変換する電力増幅器と、
電圧と、電流と、前記RF電力と関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とを測定するセンサと、
動的負荷のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正する電気的に制御可能なインピーダンス・マッチング・システムと、
前記電気的に制御可能なインピーダンス・マッチング・システムを制御するコントローラと、
を備えていることを特徴とするシステム。
【請求項2】
請求項1記載のシステムにおいて、前記コントローラは、前記電気的に制御可能なインピーダンス・マッチング・システムを制御して、前記電力増幅器と前記動的負荷との間のインピーダンスと関連付けられたコンダクタンスとサセプタンスとを同時に制御することを特徴とするシステム。
【請求項3】
請求項1記載のシステムにおいて、前記電気的に制御可能なインピーダンス・マッチング・システムは、インダクタと、前記インダクタと直列のキャパシタと、前記動的負荷と並列の複数の切換型キャパシタとを含むことを特徴とするシステム。
【請求項4】
請求項3記載のシステムにおいて、前記インダクタはマルチタップ型のインダクタ又は可変型のインダクタであることを特徴とするシステム。
【請求項5】
請求項3記載のシステムにおいて、前記複数の切換型キャパシタはそれぞれがスイッチ及び追加的なキャパシタと直列であることを特徴とするシステム。
【請求項6】
請求項1記載のシステムにおいて、前記電気的に制御可能なインピーダンス・マッチング・システムは、キャパシタと、前記動的負荷と並列である複数の切換型キャパシタとを含んでおり、前記複数のキャパシタはそれぞれがスイッチ及び追加的なキャパシタと直列であることを特徴とするシステム。
【請求項7】
請求項1記載のシステムにおいて、前記コントローラは、RF電力周波数とRF電力振幅と前記電力増幅器と前記動的負荷との間のインピーダンスとを同時に制御することを特徴とするシステム。
【請求項8】
請求項1記載のシステムにおいて、前記電気的に制御可能なインピーダンス・マッチング・システムは、前記電力増幅器と前記動的負荷との間のインピーダンス・マッチングの周波数を制御することを特徴とするシステム。
【請求項9】
請求項1記載のシステムにおいて、前記コントローラは、前記電気的に制御可能なインピーダンス・マッチング・システムを制御し、不安定な動的負荷を安定化する設定点にコンダクタンスとサセプタンスとを調節することを特徴とするシステム。
【請求項10】
請求項1記載のシステムにおいて、
前記電力増幅器によって搬送される電力を決定するセンサ較正測定モジュールと、
動的負荷に搬送される電力を決定する電子的マッチング・システム較正モジュールと、
前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算する電力消費モジュールと、
を更に備えていることを特徴とするシステム。
【請求項11】
請求項10記載のシステムにおいて、前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力は前記電力増幅器によって搬送される電力と前記動的負荷に搬送される電力との差であることを特徴とするシステム。
【請求項12】
請求項10記載のシステムにおいて、前記センサ較正測定モジュールは前記センサを抵抗性負荷に較正することを特徴とするシステム。
【請求項13】
請求項12記載のシステムにおいて、前記抵抗性負荷は50Ωであることを特徴とするシステム。
【請求項14】
請求項10記載のシステムにおいて、前記電子的マッチング・システム較正モジュールは、前記電気的に制御可能なインピーダンス・マッチング・システムの出力を負荷シミュレータに較正することを特徴とするシステム。
【請求項15】
請求項14記載のシステムにおいて、前記負荷シミュレータは逆の(inverse)電気的に制御可能なインピーダンス・マッチング・システムであることを特徴とするシステム。
【請求項16】
請求項10記載のシステムにおいて、前記電子的マッチング・システム較正モジュールは、
抵抗性負荷に搬送される電力を決定する電力計較正モジュールと、
前記負荷シミュレータにおいて消費される電力を決定する負荷シミュレータ較正モジュールと、
を含むことを特徴とするシステム。
【請求項17】
請求項15記載のシステムにおいて、前記抵抗性負荷は50Ωであることを特徴とするシステム。
【請求項18】
請求項15記載のシステムにおいて、前記動的負荷に搬送される電力は、抵抗性負荷に搬送される電力と前記負荷シミュレータの内部で消費される電力との和であることを特徴とするシステム。
【請求項19】
電力を動的負荷に搬送する方法であって、
実質的に一定の電力開ループ応答を有するDC電力を提供するステップと、
電力増幅器を用いて前記DC電力をRF電力に変換するステップと、
電圧と、電流と、前記RF電力と関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とをセンサを用いて測定するステップと、
電気的に制御可能なインピーダンス・マッチング・システムを用いて、動的負荷のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正するステップと、
を含むことを特徴とする方法。
【請求項20】
請求項19記載の方法において、前記電力増幅器と前記動的負荷との間のインピーダンスと関連付けられたコンダクタンスとサセプタンスとを同時に制御するステップを更に含むことを特徴とする方法。
【請求項21】
請求項19記載の方法において、RF電力周波数とRF電力振幅と前記電力増幅器と前記動的負荷との間のインピーダンスとを同時に制御するステップを更に含むことを特徴とする方法。
【請求項22】
請求項19記載の方法において、前記電力増幅器と前記動的負荷との間のインピーダンス・マッチングの周波数を制御するステップを更に含むことを特徴とする方法。
【請求項23】
請求項19記載の方法において、前記電気的に制御可能なインピーダンス・マッチング・システムを制御し、不安定な動的負荷を安定化する設定点にコンダクタンスとサセプタンスとを調節するステップを更に含むことを特徴とする方法。
【請求項24】
請求項19記載の方法において、
前記電力増幅器によって搬送される電力を決定するステップと、
動的負荷に搬送される電力を決定するステップと、
前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算するステップと、
を更に含むことを特徴とする方法。
【請求項25】
請求項24記載の方法において、前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力は前記電力増幅器によって搬送される電力と前記動的負荷に搬送される電力との差であることを特徴とする方法。
【請求項26】
請求項24記載の方法において、動的負荷に搬送される電力を決定する前記ステップは、
抵抗性負荷に搬送される電力を決定するステップと、
負荷シミュレータの内部で消費される電力を決定するステップと、
を含むことを特徴とする方法。
【請求項27】
請求項26記載の方法において、前記動的負荷に搬送される電力は、抵抗性負荷に搬送される電力と前記負荷シミュレータの内部で消費される電力との和であることを特徴とする方法。
【請求項28】
請求項19記載の方法において、前記センサを抵抗性負荷に較正するステップを更に含むことを特徴とする方法。
【請求項29】
請求項19記載の方法において、前記電気的に制御可能なインピーダンス・マッチング・システムの出力を負荷シミュレータに較正するステップを更に含むことを特徴とする方法。
【請求項30】
電力を動的負荷に搬送する方法であって、
実質的に一定の電力開ループ応答を有するDC電力を提供する手段と、
電力増幅器を用いて前記DC電力をRF電力に変換する手段と、
電圧と、電流と、前記RF電力と関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とを測定する手段と、
電気的に制御可能なインピーダンス・マッチング・システムを用いて、動的負荷のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正する手段と、
を含むことを特徴とする方法。
【請求項31】
請求項30記載の方法において、
前記電力増幅器によって搬送されるRF電力を決定する手段と、
動的負荷に搬送される電力を決定する手段と、
前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算する手段と、
を含むことを特徴とする方法。
【請求項1】
電力を動的負荷に搬送するシステムであって、
実質的に一定の電力開ループ応答を有するDC電力を提供する電源と、
前記DC電力をRF電力に変換する電力増幅器と、
電圧と、電流と、前記RF電力と関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とを測定するセンサと、
動的負荷のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正する電気的に制御可能なインピーダンス・マッチング・システムと、
前記電気的に制御可能なインピーダンス・マッチング・システムを制御するコントローラと、
を備えていることを特徴とするシステム。
【請求項2】
請求項1記載のシステムにおいて、前記コントローラは、前記電気的に制御可能なインピーダンス・マッチング・システムを制御して、前記電力増幅器と前記動的負荷との間のインピーダンスと関連付けられたコンダクタンスとサセプタンスとを同時に制御することを特徴とするシステム。
【請求項3】
請求項1記載のシステムにおいて、前記電気的に制御可能なインピーダンス・マッチング・システムは、インダクタと、前記インダクタと直列のキャパシタと、前記動的負荷と並列の複数の切換型キャパシタとを含むことを特徴とするシステム。
【請求項4】
請求項3記載のシステムにおいて、前記インダクタはマルチタップ型のインダクタ又は可変型のインダクタであることを特徴とするシステム。
【請求項5】
請求項3記載のシステムにおいて、前記複数の切換型キャパシタはそれぞれがスイッチ及び追加的なキャパシタと直列であることを特徴とするシステム。
【請求項6】
請求項1記載のシステムにおいて、前記電気的に制御可能なインピーダンス・マッチング・システムは、キャパシタと、前記動的負荷と並列である複数の切換型キャパシタとを含んでおり、前記複数のキャパシタはそれぞれがスイッチ及び追加的なキャパシタと直列であることを特徴とするシステム。
【請求項7】
請求項1記載のシステムにおいて、前記コントローラは、RF電力周波数とRF電力振幅と前記電力増幅器と前記動的負荷との間のインピーダンスとを同時に制御することを特徴とするシステム。
【請求項8】
請求項1記載のシステムにおいて、前記電気的に制御可能なインピーダンス・マッチング・システムは、前記電力増幅器と前記動的負荷との間のインピーダンス・マッチングの周波数を制御することを特徴とするシステム。
【請求項9】
請求項1記載のシステムにおいて、前記コントローラは、前記電気的に制御可能なインピーダンス・マッチング・システムを制御し、不安定な動的負荷を安定化する設定点にコンダクタンスとサセプタンスとを調節することを特徴とするシステム。
【請求項10】
請求項1記載のシステムにおいて、
前記電力増幅器によって搬送される電力を決定するセンサ較正測定モジュールと、
動的負荷に搬送される電力を決定する電子的マッチング・システム較正モジュールと、
前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算する電力消費モジュールと、
を更に備えていることを特徴とするシステム。
【請求項11】
請求項10記載のシステムにおいて、前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力は前記電力増幅器によって搬送される電力と前記動的負荷に搬送される電力との差であることを特徴とするシステム。
【請求項12】
請求項10記載のシステムにおいて、前記センサ較正測定モジュールは前記センサを抵抗性負荷に較正することを特徴とするシステム。
【請求項13】
請求項12記載のシステムにおいて、前記抵抗性負荷は50Ωであることを特徴とするシステム。
【請求項14】
請求項10記載のシステムにおいて、前記電子的マッチング・システム較正モジュールは、前記電気的に制御可能なインピーダンス・マッチング・システムの出力を負荷シミュレータに較正することを特徴とするシステム。
【請求項15】
請求項14記載のシステムにおいて、前記負荷シミュレータは逆の(inverse)電気的に制御可能なインピーダンス・マッチング・システムであることを特徴とするシステム。
【請求項16】
請求項10記載のシステムにおいて、前記電子的マッチング・システム較正モジュールは、
抵抗性負荷に搬送される電力を決定する電力計較正モジュールと、
前記負荷シミュレータにおいて消費される電力を決定する負荷シミュレータ較正モジュールと、
を含むことを特徴とするシステム。
【請求項17】
請求項15記載のシステムにおいて、前記抵抗性負荷は50Ωであることを特徴とするシステム。
【請求項18】
請求項15記載のシステムにおいて、前記動的負荷に搬送される電力は、抵抗性負荷に搬送される電力と前記負荷シミュレータの内部で消費される電力との和であることを特徴とするシステム。
【請求項19】
電力を動的負荷に搬送する方法であって、
実質的に一定の電力開ループ応答を有するDC電力を提供するステップと、
電力増幅器を用いて前記DC電力をRF電力に変換するステップと、
電圧と、電流と、前記RF電力と関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とをセンサを用いて測定するステップと、
電気的に制御可能なインピーダンス・マッチング・システムを用いて、動的負荷のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正するステップと、
を含むことを特徴とする方法。
【請求項20】
請求項19記載の方法において、前記電力増幅器と前記動的負荷との間のインピーダンスと関連付けられたコンダクタンスとサセプタンスとを同時に制御するステップを更に含むことを特徴とする方法。
【請求項21】
請求項19記載の方法において、RF電力周波数とRF電力振幅と前記電力増幅器と前記動的負荷との間のインピーダンスとを同時に制御するステップを更に含むことを特徴とする方法。
【請求項22】
請求項19記載の方法において、前記電力増幅器と前記動的負荷との間のインピーダンス・マッチングの周波数を制御するステップを更に含むことを特徴とする方法。
【請求項23】
請求項19記載の方法において、前記電気的に制御可能なインピーダンス・マッチング・システムを制御し、不安定な動的負荷を安定化する設定点にコンダクタンスとサセプタンスとを調節するステップを更に含むことを特徴とする方法。
【請求項24】
請求項19記載の方法において、
前記電力増幅器によって搬送される電力を決定するステップと、
動的負荷に搬送される電力を決定するステップと、
前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算するステップと、
を更に含むことを特徴とする方法。
【請求項25】
請求項24記載の方法において、前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力は前記電力増幅器によって搬送される電力と前記動的負荷に搬送される電力との差であることを特徴とする方法。
【請求項26】
請求項24記載の方法において、動的負荷に搬送される電力を決定する前記ステップは、
抵抗性負荷に搬送される電力を決定するステップと、
負荷シミュレータの内部で消費される電力を決定するステップと、
を含むことを特徴とする方法。
【請求項27】
請求項26記載の方法において、前記動的負荷に搬送される電力は、抵抗性負荷に搬送される電力と前記負荷シミュレータの内部で消費される電力との和であることを特徴とする方法。
【請求項28】
請求項19記載の方法において、前記センサを抵抗性負荷に較正するステップを更に含むことを特徴とする方法。
【請求項29】
請求項19記載の方法において、前記電気的に制御可能なインピーダンス・マッチング・システムの出力を負荷シミュレータに較正するステップを更に含むことを特徴とする方法。
【請求項30】
電力を動的負荷に搬送する方法であって、
実質的に一定の電力開ループ応答を有するDC電力を提供する手段と、
電力増幅器を用いて前記DC電力をRF電力に変換する手段と、
電圧と、電流と、前記RF電力と関連付けられた電圧ベクトルと電流ベクトルとの間の位相角とを測定する手段と、
電気的に制御可能なインピーダンス・マッチング・システムを用いて、動的負荷のインピーダンスと少なくとも実質的に一致するように前記電力増幅器のインピーダンスを修正する手段と、
を含むことを特徴とする方法。
【請求項31】
請求項30記載の方法において、
前記電力増幅器によって搬送されるRF電力を決定する手段と、
動的負荷に搬送される電力を決定する手段と、
前記電気的に制御可能なインピーダンス・マッチング・システムにおいて消費される電力を計算する手段と、
を含むことを特徴とする方法。
【図1A】

【図1B】

【図1C】

【図4】
【図5】
【図6】
【図7】
【図8】
【図2】

【図3】
【図9A】
【図9B】
【図9C】
【図9D】

【図1B】
【図1C】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図9A】
【図9B】
【図9C】
【図9D】
【公表番号】特表2009−514176(P2009−514176A)
【公表日】平成21年4月2日(2009.4.2)
【国際特許分類】
【出願番号】特願2008−538090(P2008−538090)
【出願日】平成18年10月31日(2006.10.31)
【国際出願番号】PCT/US2006/042360
【国際公開番号】WO2007/053569
【国際公開日】平成19年5月10日(2007.5.10)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
【公表日】平成21年4月2日(2009.4.2)
【国際特許分類】
【出願日】平成18年10月31日(2006.10.31)
【国際出願番号】PCT/US2006/042360
【国際公開番号】WO2007/053569
【国際公開日】平成19年5月10日(2007.5.10)
【出願人】(592053963)エム ケー エス インストルメンツ インコーポレーテッド (114)
【氏名又は名称原語表記】MKS INSTRUMENTS,INCORPORATED
【Fターム(参考)】
[ Back to top ]