
無線式センサシステム

【課題】比較的簡素な構造を用いて、親機とパッシブセンサとの距離が所定距離に高精度にセットされた状態で物理量を計測可能な無線式センサシステムを実現する。
【解決手段】親機20は、筐体200の通信面側に、所定高さのガイド部材300を備える。計測を行う際には、ガイド部材300が被検知体900におけるパッシブセンサ10が装着された皮膚の表面に当接するように、親機20を当てる。これにより、パッシブセンサ10のアンテナ12と、親機20の親機側アンテナ24との距離を一定に保ちながら、無線による計測処理を行うことができる。
【解決手段】親機20は、筐体200の通信面側に、所定高さのガイド部材300を備える。計測を行う際には、ガイド部材300が被検知体900におけるパッシブセンサ10が装着された皮膚の表面に当接するように、親機20を当てる。これにより、パッシブセンサ10のアンテナ12と、親機20の親機側アンテナ24との距離を一定に保ちながら、無線による計測処理を行うことができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、物理量を検知して所定信号を発生するパッシブセンサと、パッシブセンサに対して無線通信する親機とを備え、親機側で物理量を算出する無線式センサシステムに関する。
【背景技術】
【0002】
従来、無線通信を用いて親機(質問機)から遠隔でトリガを与えて各種の物理量を計測するセンサシステムが考案されている。例えば、特許文献1に記載の方式では、RFIDタグにセンサを備える。親機は、RFIDタグと無線通信することで、センサの検出値を取得している。そして、このようなシステムでは、RFIDタグと親機との距離に通信精度が影響される。このため、特許文献1のセンサシステムでは、親機とRFIDタグとにそれぞれ凹部と凸部を設け、当該凹部と凸部との嵌合により、RFIDタグと親機との距離を一定に固定している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−63140号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のシステムの場合、親機とRFIDタグとの双方に凹凸形状を設ける必要があるが、このような凹凸形状は加工が複雑であり、製造工程が煩雑になる。特に、精度が要求される場合には、凹凸形状の加工、製造精度も高くしなければならず、必然的に高価なものになってしまう。
【0005】
このような問題を鑑みて、本発明の目的は、比較的簡素な構造を用いて、親機とパッシブセンサとの距離が所定距離に高精度にセットされた状態で物理量を計測可能な無線式センサシステムを実現することにある。
【課題を解決するための手段】
【0006】
この発明は、パッシブセンサと親機とを備えた無線式センサシステムに関する。パッシブセンサは、物理量を感知して該物理量に応じた検知信号を出力するセンサ素子と該センサ素子に接続されており検知信号を無線通信するアンテナとを備える。親機は、該パッシブセンサと無線通信する親機側アンテナを備え、無線通信で取得した検知信号に基づいて物理量を算出する。このような構成の上で、親機は、親機側アンテナとパッシブセンサのアンテナとが所定距離に離間される高さからなるガイド部材を、親機の筐体における無線通信側の表面に備える。
【0007】
この構成では、物理量の計測を行う場合に、パッシブセンサが装着された被検知体の表面にガイド部材を当接させれば、親機の親機側アンテナとパッシブセンサのアンテナとの距離が一定で固定される。これにより、アンテナ間の距離がばらつかず、親機側アンテナで受信される時点での検知信号の変化が抑圧され、高い計測精度が得られる。
【0008】
また、この発明は、パッシブセンサと親機とを備えた無線式センサシステムに関する。パッシブセンサは、物理量を感知して該物理量に応じた検知信号を出力するセンサ素子と、該センサ素子に接続されており検知信号を無線通信するアンテナとを備える。親機は、該パッシブセンサと無線通信する親機側アンテナを備え、無線通信で取得した検知信号に基づいて物理量を算出する。このような構成の上で、親機は、親機側アンテナとパッシブセンサのアンテナとが所定距離に離間されたことを検出する測距手段を備える。そして、測距手段が所定距離を検出した場合に、検知信号に基づく物理量の算出処理を行う。
【0009】
この構成では、物理的(機構的)なガイド部材を用いず、アンテナ間の距離を計測することで、上述の所定距離での無線通信および物理量算出を行うことができる。特に、このような小型化可能な測距手段を親機に内蔵すれば、親機の外形形状を変えずに、計測精度を向上できる。
【0010】
また、この発明の無線式センサシステムでは、測距手段は、測距信号を送波する送波部と、測距信号の反射信号を受波する受波部とを備える。測距手段は、測距信号と反射信号とに基づいて測距する。
【0011】
この構成では、測距手段の具体的一例を示している。具体的に、この構成では、親機に測距用の送波部と受波部と備え、光学信号、電波信号、または超音波信号を用いて測距を行う。
【0012】
また、この発明の無線式センサシステムでは、測距手段は、親機側アンテナとアンテナとの電磁界結合によって親機側アンテナに発生する共振周波数および当該共振周波数の電力レベルを検出し、該共振周波数および電力レベルに基づいて測距する。
【0013】
この構成も、測距手段の具体的一例を示している。具体的に、この構成では、親機側アンテナとパッシブセンサのアンテナとの距離に応じて電磁界結合度が異なることを利用している。電磁界結合度が異なると、共振周波数や共振信号レベル(電力レベル)が変化する。したがって、これらの共振周波数や共振信号レベル(電力レベル)を観測することで、測距を行うことができる。そして、この構成では、測距のためだけの信号送波手段や信号受波手段を必要としないので、より構成が簡素化される。
【発明の効果】
【0014】
この発明によれば、親機やパッシブセンサを比較的簡素な構造で形成しながら、物理量を高精度に計測することができる。
【図面の簡単な説明】
【0015】
【図1】第1の実施形態に係る無線式センサシステム1の構成を示すブロック図である。
【図2】第1の実施形態に係る無線式センサシステム1に用いるパッシブセンサ10の構造を示すための平面図である。
【図3】親機20の構成を示す外観斜視図である。
【図4】第1の実施形態の無線式センサシステム1における体温計測の状況を示す図である。
【図5】電磁界結合型によるアンテナ間距離と伝搬される通信信号の周波数との関係を示す図である。
【図6】第2の実施形態の無線式センサシステム1Aの構成および使用状況を示す図である。
【図7】第2の実施形態の無線式センサシステム1Aの構成を示すブロック図である。
【図8】第2の実施形態の無線式センサシステム1Aを用いた計測方法を示すフローチャートである。
【図9】第3の実施形態の無線式センサシステム1Bの構成を示すブロック図である。
【図10】第3の実施形態の無線式センサシステム1Bを用いた計測方法を示すフローチャートである。
【発明を実施するための形態】
【0016】
本発明の第1の実施形態に係る無線式センサシステムについて、図を参照して説明する。図1は本実施形態に係る無線式センサシステム1の構成を示すブロック図である。図2は本実施形態に係る無線式センサシステム1に用いるパッシブセンサ10の構造を示すための平面図である。図3は親機20の構成を示す図であり、図3(A)が操作面側から見た外観斜視図である、図3(B)が通信面側から見た外観斜視図である。図4は、本実施形態の無線式センサシステム1における体温計測の状況を示す図である。
【0017】
<構成説明>
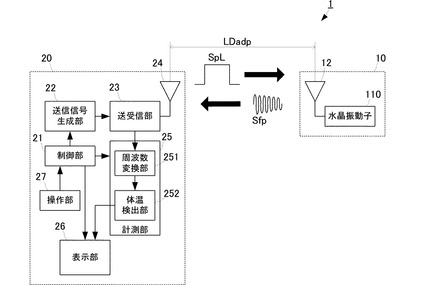
無線式センサシステム1は、パッシブセンサ10と親機20とを備える。パッシブセンサ10と親機20とは、電磁界結合もしくは電波の送受信による通信を行う。なお、通信様式は、電磁界結合に限らず、電磁誘導や電波の放射によるものであってもよい。
【0018】
パッシブセンサ10は、アンテナ12、本願の「センサ素子」に対応する水晶振動子110を備える。なお、本発明では、センサ素子として、水晶振動子を用いているが、圧電共振子、SAW共振子、音叉型共振子等、検知する物理量(温度、磁気強度等)に応じて、共振周波数が変化するものであれば、他のものを用いてもよい。
【0019】
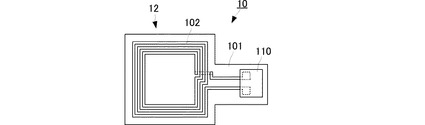
アンテナ12は、電磁界結合方式であれば、図2に示すように、絶縁性ベース基板101上に、巻回状に形成されたコイル電極102によって実現される。一方、電波の送受波方式であれば、例えばダイポールアンテナによって実現される。いずれの方式であっても、アンテナ12は、通信に利用する周波数帯域に応じた形状(電極長等)で形成されている。アンテナ12は、親機20の親機側アンテナ24からの励振信号SpLを受波して、水晶振動子110へ与える。アンテナ12は、水晶振動子110から出力される共振信号Sfpを外部放射する。この放射された共振信号Sfpを親機側アンテナ24で受波することで、共振信号Sfpは、パッシブセンサ10のアンテナ12から親機20の親機側アンテナ24へ伝送される。
【0020】
水晶振動子110は、例えばYsカットで所定厚みに設定された水晶単結晶に電極パターンを形成したものである。そして、厚み等を変化させることで、共振周波数が決定される。このような水晶振動子110は、図2に示すように、ベース基板101上に形成されたランド電極に実装され、アンテナ12を構成するコイル電極102へ接続されている。
【0021】
水晶振動子110は、所定の物理量(本実施形態では温度Tを例にする)を感知して、感知した温度Tに応じた共振周波数で発振する特性を有する。したがって、上述のように、アンテナ12から、パルス状の励振信号SpLを受けると、水晶振動子110は、感知した磁気強度に応じた共振周波数で残響共振し、共振信号Sfpを出力する。共振信号Sfpは、アンテナ12へ出力される。
【0022】
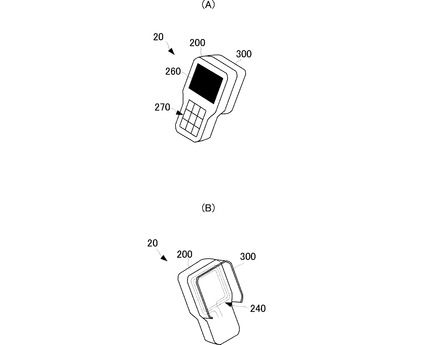
親機20は、構造的には、図3に示すように、操作面と通信面とを備えた、略直方体形状の筐体200を備える。筐体200の操作面には、当該筐体の200の長手方向に沿って、表示用ディスプレイ260と複数の操作子270とが配設されている。筐体200の通信面には、当該通信面側の内部に親機側アンテナ24を形成する巻回状コイル電極240が配設されている。
【0023】
また、筐体200の通信面には、当該通信面から外方に向く直交する方向の高さが、所定の高さからなるガイド部材300が配設されている。ガイド部材300は、例えば所定厚みからなる誘電体基板等からなり、筐体200の通信面に対して、巻回状コイル電極240を囲むような形状で配設されている。
【0024】
なお、本実施形態の親機20は、巻回状コイル電極240を三方から囲む形状にしているが、これに限るものではなく、図4に示すように、当該ガイド部材300をパッシブセンサ10が装着された被検知体900の表面に当接させることで、親機20とパッシブセンサ10とが所定の距離を保てる形状であれば、他の形状であってもよい。
【0025】
そして、ガイド部材300の高さは、当該ガイド部材300を被検知体に当接させた状態で、親機20とパッシブセンサ10とが予め設定した距離で通信できるような高さに設定されている。
【0026】
このような構造的特徴を有する親機20は、回路機能的に次の構成を備える。
【0027】
親機20は、制御部21、送信信号生成部22、送受信部23、親機側アンテナ24、計測部25、関連情報読取部26、および表示部27、操作部28を備える。
【0028】
制御部21は、親機20の全体制御を行うとともに、計測モードにおける送信モードおよび受信モードの切り替え等の制御を行う。これらの制御は、例えば操作部27からの操作入力内容に基づいて実行される。
【0029】
送信信号生成部22は、制御部21からの送信モード開始制御にしたがって、パルス状の励振信号SpLを生成し、送受信部23へ出力する。
【0030】
送受信部23は、送信信号生成部22からの励振信号SpLを親機側アンテナ24へ出力し、親機側アンテナ24からの共振信号Sfpを計測部25へ出力する。
【0031】
親機側アンテナ24は、上述のように、パッシブセンサ10のアンテナ12と同様に、仕様に応じて平板状のコイル電極によるアンテナや、ダイポールアンテナによって実現される。
【0032】
計測部25は、周波数変換部251、体温検出部252を備える。周波数変換部251は、共振信号Sfpを周波数解析し、共振周波数fpを検出する。
【0033】
体温検出部252は、予め設定記憶されている水晶振動子に応じた温度−周波数特性と、周波数変換部251からの共振周波数fpとを比較し、当該共振周波数に対応する温度を読み出すことで、温度Tを算出する。
【0034】
計測部25は、算出した温度Tと関連情報とを関連付けして、表示部26へ出力する。
【0035】
表示部26は、表示制御部と、上述の表示用ディスプレイとを備え、計測部25で算出された温度Tを表示する。
【0036】
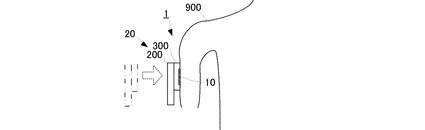
このような構成において、本実施形態の無線式センサシステム1では、次に示すように、被検知体900である人の体温を計測する。
【0037】
まず、被検知体900である人にパッシブセンサ10を装着する。次に、計測者は、ガイド部材300が被検知体900である人の皮膚表面に当接するように、親機20を当てる。この際、ガイド部材300内に、パッシブセンサ10のアンテナ12が入るように配置する。
【0038】
次に、計測者は、親機20の操作子270(操作部27)を操作して、体温計測開始の操作入力を行う。親機20は、パルス状励起信号SpLを生成し、親機側アンテナ24から放射する。パッシブセンサ10のアンテナ12はパルス状励起信号SpLを受波して、水晶振動子110へ印加する。水晶振動子110は、被検知体900の体温に応じた共振周波数で残響共振し、共振信号Sfpを発生する。パッシブセンサ10のアンテナ10は、この共振信号Sfpを放射し、親機側アンテナ24がこの共振信号Sfpを受波する。
【0039】
親機20は、受波した共振信号Sfpに基づいて温度(体温)Tを計測する。
【0040】
このような計測において、本実施形態のように、親機20にガイド部材300を設置し、親機20とパッシブセンサ10との距離、より具体的には、親機側アンテナ24とアンテナ12との距離を固定することで、常に、一定の間隔LDadtで無線通信を行うことができる。
【0041】
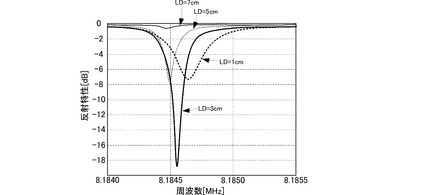
ここで、図5に示すように、共振信号Sfpの共振周波数fpは、アンテナ間距離によって変化する。図5は、電磁界結合型によるアンテナ間距離と伝搬される通信信号の周波数との関係を示す図である。図5に示すように、アンテナ間距離が変化すると、伝搬経路長が変化し、これに応じた通信信号に対する空気のインピーダンス変化が生じてしまう。
【0042】
したがって、本実施形態に示すように、親機20とパッシブセンサ10との間隔を一定に保つことで、空気のインピーダンスにより周波数が変化しやすい共振信号Sfpの周波数fpを安定させることができる。これにより、親機20で得られる共振信号Sfpの周波数が、計測する温度のみに依存して安定する。この結果、体温の計測精度を向上させることができる。また、このように形状が単純なガイド部材300を親機20の筐体200に配設するという簡素な構造だけで、計測精度を向上させることができる。
【0043】
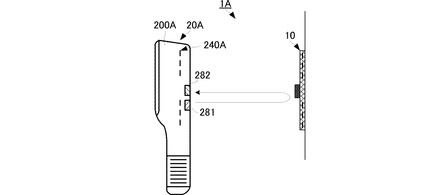
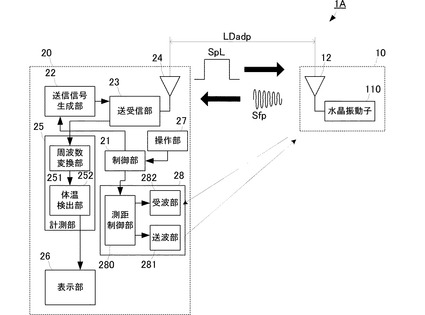
次に、第2の実施形態に係る無線式センサシステムについて、図を参照して説明する。図6は本実施形態の無線式センサシステム1Aの構成および使用状況を示す図である。図7は本実施形態の無線式センサシステム1Aの構成を示すブロック図である。本実施形態の無線式センサシステム1Aでは、親機20Aの構造、構成が、第1の実施形態に示した無線式センサシステム1の親機20と異なるものであり、パッシブセンサ10の構造、構成は第1の実施形態と同じである。したがって、親機20Aについてのみ、具体的に説明する。
【0044】
本実施形態の親機20Aは、ガイド部材300を備えず、代わりに、光学的な測距を行う測距部28を備える。測距部28は、測距制御部280、送波部281、および受波部282を備える。
【0045】
測距制御部280は、制御部21から測距モード開始制御を受けると、送波部281に対して送波制御を行う。送波部281は発光素子からなり、送波制御に応じて発光する。発光された光信号は、パッシブセンサ10の表面に到達すると反射される。
【0046】
受波部282は、フォトダイオード等の受光素子からなり、パッシブセンサ10で反射された光信号を受波し、受波検出信号を出力する。
【0047】
測距制御部280は、発光制御タイミングと受波検出信号の受信タイミングとの時間差を計測し、当該時間差から親機20Aとパッシブセンサ10との間の距離を算出する。測距制御部280は、当該算出距離を制御部21へ出力する。なお、このような測距処理は、測距モード開始制御後、所定の時間間隔で継続的に行われる。
【0048】
制御部21は、測距結果から、親機20Aとパッシブセンサ10との間の距離が、適する間隔LDadtであることを検出すると、上述の第1実施形態に示したような計測モードを実行し、体温の計測を行う。
【0049】
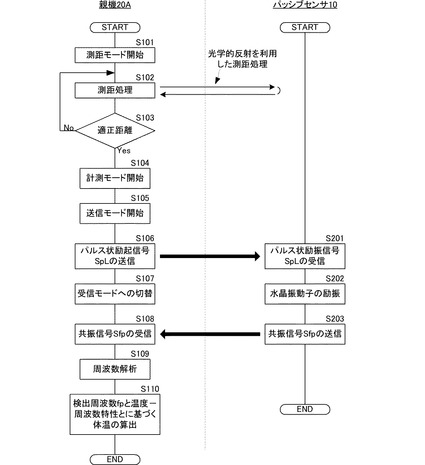
次に、このような構成による計測方法について図を参照して説明する。図8は、本実施形態の無線式センサシステム1Aを用いた計測方法を示すフローチャートである。なお、以下の説明では、計測処理前に測距処理をしているが、計測処理を行いながら測距処理を行うことができる。この場合、測距処理により適する間隔LDadtが得られたタイミングの計測結果を採用すればよい。
【0050】
まず、親機20Aは、測距モードを開始する(S101)。これにより、親機20Aの測距部28は、上述のような光学的測距処理を行う(S102)。測距部28は、測距結果が適する間隔LDadtになるまで(S103:No)、測距処理を所定間隔で繰り返す。
【0051】
親機20Aは、測距結果が適する間隔LDadtになると(S103:Yes)、測距モードを終了し、計測モードを開始する(S104)。
【0052】
次に、親機20Aは、計測モードに移行し、送信モードを開始する(S105)。親機20Aは、パルス状の励振信号SpLを送信する(S106)。親機20Aは、励振信号SpLの送信後、受信モードに切り替わる(S107)。
【0053】
パッシブセンサ10は、アンテナ12で励振信号SpLを受信する(S201)。パッシブセンサ10の水晶振動子110は、励振信号SpLで励振し、被検知体の体温に応じた共振周波数で発振し、共振信号Sfpを出力する(S202)。パッシブセンサ10は、共振信号Sfpを送信する(S203)。
【0054】
親機20Aは、共振信号Sfpを受信し(S108)、当該共振信号Sfpの周波数解析を行い、共振周波数fpを検出する(S109)。
【0055】
親機20Aは、検出した共振周波数fpと、予め記憶している温度−周波数特性とに基づいて、計測体温を算出する(S110)。
【0056】
以上のような構成および処理を用いることで、親機20Aとパッシブセンサ10とが適した距離に配された状態で、体温の計測が行われるので、計測結果のバラツキを抑制することができる。これにより、高い計測精度で体温計測を行うことができる。
【0057】
次に、第3の実施形態に係る無線式センサシステム1Bについて、図を参照して説明する。図9は第3の実施形態の無線式センサシステム1Bの構成を示すブロック図である。本実施形態の無線式センサシステム1Bは、上述のガイド部材300も光学的測距手段も備えず、親機側アンテナ24とパッシブセンサ10のアンテナ12との電磁界結合による共振現象を利用して、測距を行う。すなわち、図5に示すように、アンテナ間距離により共振周波数が変化し、反射特性も異なることを利用する。
【0058】
親機20Bは測距部29を備える。測距部29は、測距モード時に、送受信部23から出力される信号の電力を計測する。測距部29は、計測した電力に基づいて、アンテナ間距離の算出、すなわち測距処理を行う。制御部21は、測距結果が適する間隔LDadtになると、上述の各実施形態と同様に計測処理を行う。
【0059】
次に、このような構成による計測方法について図を参照して説明する。図10は、本実施形態の無線式センサシステム1Bを用いた計測方法を示すフローチャートである。なお、本実施形態の無線式センサシステム1Bは、処理的には、測距処理が第2の実施形態の無線式センサシステム1Aと異なるのみであるので、計測モード移行前までについてのみ説明する。
【0060】
まず、親機20Bは、測距モードを開始する(S101)。親機20Bの測距部29は、送受信部23からの出力信号の電力を計測し、距離検出を行う(S302)。測距部29は、測距結果が適する間隔LDadtになるまで(S303:No)、測距処理を所定間隔で繰り返す。
【0061】
親機20Bは、測距結果が適する間隔LDadtになると(S103:Yes)、測距モードを終了し、計測モードを開始する(S104)。以下の計測処理は、第2の実施形態と同じである。
【0062】
以上のような構成および処理を用いることでも、親機20Bとパッシブセンサ10とが適した距離に配された状態で、体温の計測が行われるので、計測結果のバラツキを抑制することができる。これにより、高い計測精度で体温計測を行うことができる。
【0063】
さらに、本実施形態の構成および処理を用いることで、計測用とは別に、測距用の信号の送受波部や、機構的部材を用いなくてよい。これにより、親機20Bを、より簡素な構造で構成することができる。
【符号の説明】
【0064】
1,1A,1B−無線式センサシステム、10−パッシブセンサ、12−アンテナ、110−水晶振動子、20,20A,20B−親機、21−制御部、22−送信信号生成部、23−送受信部、24−親機側アンテナ、25−計測部、251−周波数変換部、252−体温検出部、26−表示部、27−操作部、28,29−測距部、280−測距制御部、281−送波部、282−受波部、101−ベース基板、102−巻回状コイル電極、200−本体、260−表示用ディスプレイ、270−操作子、240−巻回状コイル電極、300−ガイド部材、
【技術分野】
【0001】
本発明は、物理量を検知して所定信号を発生するパッシブセンサと、パッシブセンサに対して無線通信する親機とを備え、親機側で物理量を算出する無線式センサシステムに関する。
【背景技術】
【0002】
従来、無線通信を用いて親機(質問機)から遠隔でトリガを与えて各種の物理量を計測するセンサシステムが考案されている。例えば、特許文献1に記載の方式では、RFIDタグにセンサを備える。親機は、RFIDタグと無線通信することで、センサの検出値を取得している。そして、このようなシステムでは、RFIDタグと親機との距離に通信精度が影響される。このため、特許文献1のセンサシステムでは、親機とRFIDタグとにそれぞれ凹部と凸部を設け、当該凹部と凸部との嵌合により、RFIDタグと親機との距離を一定に固定している。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2005−63140号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に記載のシステムの場合、親機とRFIDタグとの双方に凹凸形状を設ける必要があるが、このような凹凸形状は加工が複雑であり、製造工程が煩雑になる。特に、精度が要求される場合には、凹凸形状の加工、製造精度も高くしなければならず、必然的に高価なものになってしまう。
【0005】
このような問題を鑑みて、本発明の目的は、比較的簡素な構造を用いて、親機とパッシブセンサとの距離が所定距離に高精度にセットされた状態で物理量を計測可能な無線式センサシステムを実現することにある。
【課題を解決するための手段】
【0006】
この発明は、パッシブセンサと親機とを備えた無線式センサシステムに関する。パッシブセンサは、物理量を感知して該物理量に応じた検知信号を出力するセンサ素子と該センサ素子に接続されており検知信号を無線通信するアンテナとを備える。親機は、該パッシブセンサと無線通信する親機側アンテナを備え、無線通信で取得した検知信号に基づいて物理量を算出する。このような構成の上で、親機は、親機側アンテナとパッシブセンサのアンテナとが所定距離に離間される高さからなるガイド部材を、親機の筐体における無線通信側の表面に備える。
【0007】
この構成では、物理量の計測を行う場合に、パッシブセンサが装着された被検知体の表面にガイド部材を当接させれば、親機の親機側アンテナとパッシブセンサのアンテナとの距離が一定で固定される。これにより、アンテナ間の距離がばらつかず、親機側アンテナで受信される時点での検知信号の変化が抑圧され、高い計測精度が得られる。
【0008】
また、この発明は、パッシブセンサと親機とを備えた無線式センサシステムに関する。パッシブセンサは、物理量を感知して該物理量に応じた検知信号を出力するセンサ素子と、該センサ素子に接続されており検知信号を無線通信するアンテナとを備える。親機は、該パッシブセンサと無線通信する親機側アンテナを備え、無線通信で取得した検知信号に基づいて物理量を算出する。このような構成の上で、親機は、親機側アンテナとパッシブセンサのアンテナとが所定距離に離間されたことを検出する測距手段を備える。そして、測距手段が所定距離を検出した場合に、検知信号に基づく物理量の算出処理を行う。
【0009】
この構成では、物理的(機構的)なガイド部材を用いず、アンテナ間の距離を計測することで、上述の所定距離での無線通信および物理量算出を行うことができる。特に、このような小型化可能な測距手段を親機に内蔵すれば、親機の外形形状を変えずに、計測精度を向上できる。
【0010】
また、この発明の無線式センサシステムでは、測距手段は、測距信号を送波する送波部と、測距信号の反射信号を受波する受波部とを備える。測距手段は、測距信号と反射信号とに基づいて測距する。
【0011】
この構成では、測距手段の具体的一例を示している。具体的に、この構成では、親機に測距用の送波部と受波部と備え、光学信号、電波信号、または超音波信号を用いて測距を行う。
【0012】
また、この発明の無線式センサシステムでは、測距手段は、親機側アンテナとアンテナとの電磁界結合によって親機側アンテナに発生する共振周波数および当該共振周波数の電力レベルを検出し、該共振周波数および電力レベルに基づいて測距する。
【0013】
この構成も、測距手段の具体的一例を示している。具体的に、この構成では、親機側アンテナとパッシブセンサのアンテナとの距離に応じて電磁界結合度が異なることを利用している。電磁界結合度が異なると、共振周波数や共振信号レベル(電力レベル)が変化する。したがって、これらの共振周波数や共振信号レベル(電力レベル)を観測することで、測距を行うことができる。そして、この構成では、測距のためだけの信号送波手段や信号受波手段を必要としないので、より構成が簡素化される。
【発明の効果】
【0014】
この発明によれば、親機やパッシブセンサを比較的簡素な構造で形成しながら、物理量を高精度に計測することができる。
【図面の簡単な説明】
【0015】
【図1】第1の実施形態に係る無線式センサシステム1の構成を示すブロック図である。
【図2】第1の実施形態に係る無線式センサシステム1に用いるパッシブセンサ10の構造を示すための平面図である。
【図3】親機20の構成を示す外観斜視図である。
【図4】第1の実施形態の無線式センサシステム1における体温計測の状況を示す図である。
【図5】電磁界結合型によるアンテナ間距離と伝搬される通信信号の周波数との関係を示す図である。
【図6】第2の実施形態の無線式センサシステム1Aの構成および使用状況を示す図である。
【図7】第2の実施形態の無線式センサシステム1Aの構成を示すブロック図である。
【図8】第2の実施形態の無線式センサシステム1Aを用いた計測方法を示すフローチャートである。
【図9】第3の実施形態の無線式センサシステム1Bの構成を示すブロック図である。
【図10】第3の実施形態の無線式センサシステム1Bを用いた計測方法を示すフローチャートである。
【発明を実施するための形態】
【0016】
本発明の第1の実施形態に係る無線式センサシステムについて、図を参照して説明する。図1は本実施形態に係る無線式センサシステム1の構成を示すブロック図である。図2は本実施形態に係る無線式センサシステム1に用いるパッシブセンサ10の構造を示すための平面図である。図3は親機20の構成を示す図であり、図3(A)が操作面側から見た外観斜視図である、図3(B)が通信面側から見た外観斜視図である。図4は、本実施形態の無線式センサシステム1における体温計測の状況を示す図である。
【0017】
<構成説明>
無線式センサシステム1は、パッシブセンサ10と親機20とを備える。パッシブセンサ10と親機20とは、電磁界結合もしくは電波の送受信による通信を行う。なお、通信様式は、電磁界結合に限らず、電磁誘導や電波の放射によるものであってもよい。
【0018】
パッシブセンサ10は、アンテナ12、本願の「センサ素子」に対応する水晶振動子110を備える。なお、本発明では、センサ素子として、水晶振動子を用いているが、圧電共振子、SAW共振子、音叉型共振子等、検知する物理量(温度、磁気強度等)に応じて、共振周波数が変化するものであれば、他のものを用いてもよい。
【0019】
アンテナ12は、電磁界結合方式であれば、図2に示すように、絶縁性ベース基板101上に、巻回状に形成されたコイル電極102によって実現される。一方、電波の送受波方式であれば、例えばダイポールアンテナによって実現される。いずれの方式であっても、アンテナ12は、通信に利用する周波数帯域に応じた形状(電極長等)で形成されている。アンテナ12は、親機20の親機側アンテナ24からの励振信号SpLを受波して、水晶振動子110へ与える。アンテナ12は、水晶振動子110から出力される共振信号Sfpを外部放射する。この放射された共振信号Sfpを親機側アンテナ24で受波することで、共振信号Sfpは、パッシブセンサ10のアンテナ12から親機20の親機側アンテナ24へ伝送される。
【0020】
水晶振動子110は、例えばYsカットで所定厚みに設定された水晶単結晶に電極パターンを形成したものである。そして、厚み等を変化させることで、共振周波数が決定される。このような水晶振動子110は、図2に示すように、ベース基板101上に形成されたランド電極に実装され、アンテナ12を構成するコイル電極102へ接続されている。
【0021】
水晶振動子110は、所定の物理量(本実施形態では温度Tを例にする)を感知して、感知した温度Tに応じた共振周波数で発振する特性を有する。したがって、上述のように、アンテナ12から、パルス状の励振信号SpLを受けると、水晶振動子110は、感知した磁気強度に応じた共振周波数で残響共振し、共振信号Sfpを出力する。共振信号Sfpは、アンテナ12へ出力される。
【0022】
親機20は、構造的には、図3に示すように、操作面と通信面とを備えた、略直方体形状の筐体200を備える。筐体200の操作面には、当該筐体の200の長手方向に沿って、表示用ディスプレイ260と複数の操作子270とが配設されている。筐体200の通信面には、当該通信面側の内部に親機側アンテナ24を形成する巻回状コイル電極240が配設されている。
【0023】
また、筐体200の通信面には、当該通信面から外方に向く直交する方向の高さが、所定の高さからなるガイド部材300が配設されている。ガイド部材300は、例えば所定厚みからなる誘電体基板等からなり、筐体200の通信面に対して、巻回状コイル電極240を囲むような形状で配設されている。
【0024】
なお、本実施形態の親機20は、巻回状コイル電極240を三方から囲む形状にしているが、これに限るものではなく、図4に示すように、当該ガイド部材300をパッシブセンサ10が装着された被検知体900の表面に当接させることで、親機20とパッシブセンサ10とが所定の距離を保てる形状であれば、他の形状であってもよい。
【0025】
そして、ガイド部材300の高さは、当該ガイド部材300を被検知体に当接させた状態で、親機20とパッシブセンサ10とが予め設定した距離で通信できるような高さに設定されている。
【0026】
このような構造的特徴を有する親機20は、回路機能的に次の構成を備える。
【0027】
親機20は、制御部21、送信信号生成部22、送受信部23、親機側アンテナ24、計測部25、関連情報読取部26、および表示部27、操作部28を備える。
【0028】
制御部21は、親機20の全体制御を行うとともに、計測モードにおける送信モードおよび受信モードの切り替え等の制御を行う。これらの制御は、例えば操作部27からの操作入力内容に基づいて実行される。
【0029】
送信信号生成部22は、制御部21からの送信モード開始制御にしたがって、パルス状の励振信号SpLを生成し、送受信部23へ出力する。
【0030】
送受信部23は、送信信号生成部22からの励振信号SpLを親機側アンテナ24へ出力し、親機側アンテナ24からの共振信号Sfpを計測部25へ出力する。
【0031】
親機側アンテナ24は、上述のように、パッシブセンサ10のアンテナ12と同様に、仕様に応じて平板状のコイル電極によるアンテナや、ダイポールアンテナによって実現される。
【0032】
計測部25は、周波数変換部251、体温検出部252を備える。周波数変換部251は、共振信号Sfpを周波数解析し、共振周波数fpを検出する。
【0033】
体温検出部252は、予め設定記憶されている水晶振動子に応じた温度−周波数特性と、周波数変換部251からの共振周波数fpとを比較し、当該共振周波数に対応する温度を読み出すことで、温度Tを算出する。
【0034】
計測部25は、算出した温度Tと関連情報とを関連付けして、表示部26へ出力する。
【0035】
表示部26は、表示制御部と、上述の表示用ディスプレイとを備え、計測部25で算出された温度Tを表示する。
【0036】
このような構成において、本実施形態の無線式センサシステム1では、次に示すように、被検知体900である人の体温を計測する。
【0037】
まず、被検知体900である人にパッシブセンサ10を装着する。次に、計測者は、ガイド部材300が被検知体900である人の皮膚表面に当接するように、親機20を当てる。この際、ガイド部材300内に、パッシブセンサ10のアンテナ12が入るように配置する。
【0038】
次に、計測者は、親機20の操作子270(操作部27)を操作して、体温計測開始の操作入力を行う。親機20は、パルス状励起信号SpLを生成し、親機側アンテナ24から放射する。パッシブセンサ10のアンテナ12はパルス状励起信号SpLを受波して、水晶振動子110へ印加する。水晶振動子110は、被検知体900の体温に応じた共振周波数で残響共振し、共振信号Sfpを発生する。パッシブセンサ10のアンテナ10は、この共振信号Sfpを放射し、親機側アンテナ24がこの共振信号Sfpを受波する。
【0039】
親機20は、受波した共振信号Sfpに基づいて温度(体温)Tを計測する。
【0040】
このような計測において、本実施形態のように、親機20にガイド部材300を設置し、親機20とパッシブセンサ10との距離、より具体的には、親機側アンテナ24とアンテナ12との距離を固定することで、常に、一定の間隔LDadtで無線通信を行うことができる。
【0041】
ここで、図5に示すように、共振信号Sfpの共振周波数fpは、アンテナ間距離によって変化する。図5は、電磁界結合型によるアンテナ間距離と伝搬される通信信号の周波数との関係を示す図である。図5に示すように、アンテナ間距離が変化すると、伝搬経路長が変化し、これに応じた通信信号に対する空気のインピーダンス変化が生じてしまう。
【0042】
したがって、本実施形態に示すように、親機20とパッシブセンサ10との間隔を一定に保つことで、空気のインピーダンスにより周波数が変化しやすい共振信号Sfpの周波数fpを安定させることができる。これにより、親機20で得られる共振信号Sfpの周波数が、計測する温度のみに依存して安定する。この結果、体温の計測精度を向上させることができる。また、このように形状が単純なガイド部材300を親機20の筐体200に配設するという簡素な構造だけで、計測精度を向上させることができる。
【0043】
次に、第2の実施形態に係る無線式センサシステムについて、図を参照して説明する。図6は本実施形態の無線式センサシステム1Aの構成および使用状況を示す図である。図7は本実施形態の無線式センサシステム1Aの構成を示すブロック図である。本実施形態の無線式センサシステム1Aでは、親機20Aの構造、構成が、第1の実施形態に示した無線式センサシステム1の親機20と異なるものであり、パッシブセンサ10の構造、構成は第1の実施形態と同じである。したがって、親機20Aについてのみ、具体的に説明する。
【0044】
本実施形態の親機20Aは、ガイド部材300を備えず、代わりに、光学的な測距を行う測距部28を備える。測距部28は、測距制御部280、送波部281、および受波部282を備える。
【0045】
測距制御部280は、制御部21から測距モード開始制御を受けると、送波部281に対して送波制御を行う。送波部281は発光素子からなり、送波制御に応じて発光する。発光された光信号は、パッシブセンサ10の表面に到達すると反射される。
【0046】
受波部282は、フォトダイオード等の受光素子からなり、パッシブセンサ10で反射された光信号を受波し、受波検出信号を出力する。
【0047】
測距制御部280は、発光制御タイミングと受波検出信号の受信タイミングとの時間差を計測し、当該時間差から親機20Aとパッシブセンサ10との間の距離を算出する。測距制御部280は、当該算出距離を制御部21へ出力する。なお、このような測距処理は、測距モード開始制御後、所定の時間間隔で継続的に行われる。
【0048】
制御部21は、測距結果から、親機20Aとパッシブセンサ10との間の距離が、適する間隔LDadtであることを検出すると、上述の第1実施形態に示したような計測モードを実行し、体温の計測を行う。
【0049】
次に、このような構成による計測方法について図を参照して説明する。図8は、本実施形態の無線式センサシステム1Aを用いた計測方法を示すフローチャートである。なお、以下の説明では、計測処理前に測距処理をしているが、計測処理を行いながら測距処理を行うことができる。この場合、測距処理により適する間隔LDadtが得られたタイミングの計測結果を採用すればよい。
【0050】
まず、親機20Aは、測距モードを開始する(S101)。これにより、親機20Aの測距部28は、上述のような光学的測距処理を行う(S102)。測距部28は、測距結果が適する間隔LDadtになるまで(S103:No)、測距処理を所定間隔で繰り返す。
【0051】
親機20Aは、測距結果が適する間隔LDadtになると(S103:Yes)、測距モードを終了し、計測モードを開始する(S104)。
【0052】
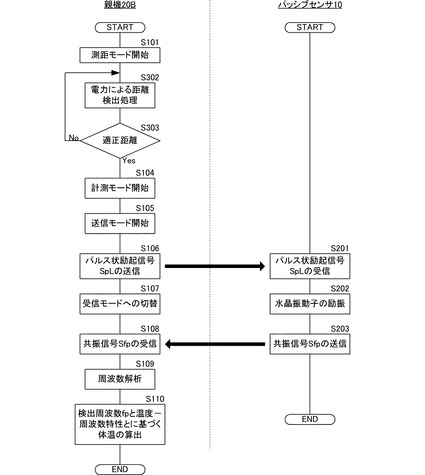
次に、親機20Aは、計測モードに移行し、送信モードを開始する(S105)。親機20Aは、パルス状の励振信号SpLを送信する(S106)。親機20Aは、励振信号SpLの送信後、受信モードに切り替わる(S107)。
【0053】
パッシブセンサ10は、アンテナ12で励振信号SpLを受信する(S201)。パッシブセンサ10の水晶振動子110は、励振信号SpLで励振し、被検知体の体温に応じた共振周波数で発振し、共振信号Sfpを出力する(S202)。パッシブセンサ10は、共振信号Sfpを送信する(S203)。
【0054】
親機20Aは、共振信号Sfpを受信し(S108)、当該共振信号Sfpの周波数解析を行い、共振周波数fpを検出する(S109)。
【0055】
親機20Aは、検出した共振周波数fpと、予め記憶している温度−周波数特性とに基づいて、計測体温を算出する(S110)。
【0056】
以上のような構成および処理を用いることで、親機20Aとパッシブセンサ10とが適した距離に配された状態で、体温の計測が行われるので、計測結果のバラツキを抑制することができる。これにより、高い計測精度で体温計測を行うことができる。
【0057】
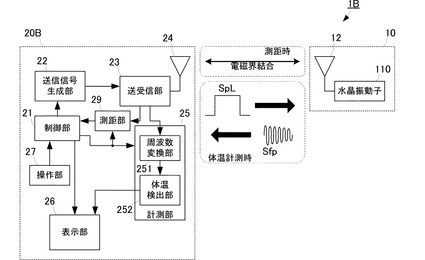
次に、第3の実施形態に係る無線式センサシステム1Bについて、図を参照して説明する。図9は第3の実施形態の無線式センサシステム1Bの構成を示すブロック図である。本実施形態の無線式センサシステム1Bは、上述のガイド部材300も光学的測距手段も備えず、親機側アンテナ24とパッシブセンサ10のアンテナ12との電磁界結合による共振現象を利用して、測距を行う。すなわち、図5に示すように、アンテナ間距離により共振周波数が変化し、反射特性も異なることを利用する。
【0058】
親機20Bは測距部29を備える。測距部29は、測距モード時に、送受信部23から出力される信号の電力を計測する。測距部29は、計測した電力に基づいて、アンテナ間距離の算出、すなわち測距処理を行う。制御部21は、測距結果が適する間隔LDadtになると、上述の各実施形態と同様に計測処理を行う。
【0059】
次に、このような構成による計測方法について図を参照して説明する。図10は、本実施形態の無線式センサシステム1Bを用いた計測方法を示すフローチャートである。なお、本実施形態の無線式センサシステム1Bは、処理的には、測距処理が第2の実施形態の無線式センサシステム1Aと異なるのみであるので、計測モード移行前までについてのみ説明する。
【0060】
まず、親機20Bは、測距モードを開始する(S101)。親機20Bの測距部29は、送受信部23からの出力信号の電力を計測し、距離検出を行う(S302)。測距部29は、測距結果が適する間隔LDadtになるまで(S303:No)、測距処理を所定間隔で繰り返す。
【0061】
親機20Bは、測距結果が適する間隔LDadtになると(S103:Yes)、測距モードを終了し、計測モードを開始する(S104)。以下の計測処理は、第2の実施形態と同じである。
【0062】
以上のような構成および処理を用いることでも、親機20Bとパッシブセンサ10とが適した距離に配された状態で、体温の計測が行われるので、計測結果のバラツキを抑制することができる。これにより、高い計測精度で体温計測を行うことができる。
【0063】
さらに、本実施形態の構成および処理を用いることで、計測用とは別に、測距用の信号の送受波部や、機構的部材を用いなくてよい。これにより、親機20Bを、より簡素な構造で構成することができる。
【符号の説明】
【0064】
1,1A,1B−無線式センサシステム、10−パッシブセンサ、12−アンテナ、110−水晶振動子、20,20A,20B−親機、21−制御部、22−送信信号生成部、23−送受信部、24−親機側アンテナ、25−計測部、251−周波数変換部、252−体温検出部、26−表示部、27−操作部、28,29−測距部、280−測距制御部、281−送波部、282−受波部、101−ベース基板、102−巻回状コイル電極、200−本体、260−表示用ディスプレイ、270−操作子、240−巻回状コイル電極、300−ガイド部材、
【特許請求の範囲】
【請求項1】
物理量を感知して該物理量に応じた検知信号を出力するセンサ素子と、該センサ素子に接続されており、前記検知信号を無線通信するアンテナと、を備えたパッシブセンサと、
該パッシブセンサと無線通信する親機側アンテナを備え、無線通信で取得した前記検知信号に基づいて前記物理量を算出する親機と、を備えた無線式センサシステムであって、
前記親機は、前記親機側アンテナと前記パッシブセンサの前記アンテナとが所定距離に離間される高さからなるガイド部材を、前記親機の筐体における無線通信側の表面に備える、無線式センサシステム。
【請求項2】
物理量を感知して該物理量に応じた検知信号を出力するセンサ素子と、該センサ素子に接続されており前記検知信号を無線通信するアンテナとを備えたパッシブセンサと、
該パッシブセンサと無線通信する親機側アンテナを備え、無線通信で取得した前記検知信号に基づいて前記物理量を算出する親機と、を備えた無線式センサシステムであって、
前記親機は、前記親機側アンテナと前記パッシブセンサの前記アンテナとが所定距離に離間されたことを検出する測距手段を備え、
該測距手段が前記所定距離を検出した場合に、前記検知信号に基づく物理量の算出処理を行う、無線式センサシステム。
【請求項3】
請求項2に記載の無線式センサシステムであって、
前記測距手段は、測距信号を送波する送波部と、前記光学的測距信号の反射信号を受波する受波部とを備え、前記測距信号と前記反射信号とに基づいて測距する、無線式センサシステム。
【請求項4】
請求項2に記載の無線式センサシステムであって、
前記測距手段は、前記親機側アンテナと前記アンテナとの電磁界結合によって前記親機側アンテナに発生する共振周波数および当該共振周波数の電力レベルを検出し、該共振周波数および電力レベルに基づいて測距する、無線式センサシステム。
【請求項1】
物理量を感知して該物理量に応じた検知信号を出力するセンサ素子と、該センサ素子に接続されており、前記検知信号を無線通信するアンテナと、を備えたパッシブセンサと、
該パッシブセンサと無線通信する親機側アンテナを備え、無線通信で取得した前記検知信号に基づいて前記物理量を算出する親機と、を備えた無線式センサシステムであって、
前記親機は、前記親機側アンテナと前記パッシブセンサの前記アンテナとが所定距離に離間される高さからなるガイド部材を、前記親機の筐体における無線通信側の表面に備える、無線式センサシステム。
【請求項2】
物理量を感知して該物理量に応じた検知信号を出力するセンサ素子と、該センサ素子に接続されており前記検知信号を無線通信するアンテナとを備えたパッシブセンサと、
該パッシブセンサと無線通信する親機側アンテナを備え、無線通信で取得した前記検知信号に基づいて前記物理量を算出する親機と、を備えた無線式センサシステムであって、
前記親機は、前記親機側アンテナと前記パッシブセンサの前記アンテナとが所定距離に離間されたことを検出する測距手段を備え、
該測距手段が前記所定距離を検出した場合に、前記検知信号に基づく物理量の算出処理を行う、無線式センサシステム。
【請求項3】
請求項2に記載の無線式センサシステムであって、
前記測距手段は、測距信号を送波する送波部と、前記光学的測距信号の反射信号を受波する受波部とを備え、前記測距信号と前記反射信号とに基づいて測距する、無線式センサシステム。
【請求項4】
請求項2に記載の無線式センサシステムであって、
前記測距手段は、前記親機側アンテナと前記アンテナとの電磁界結合によって前記親機側アンテナに発生する共振周波数および当該共振周波数の電力レベルを検出し、該共振周波数および電力レベルに基づいて測距する、無線式センサシステム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−8750(P2012−8750A)
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願番号】特願2010−143276(P2010−143276)
【出願日】平成22年6月24日(2010.6.24)
【出願人】(000006231)株式会社村田製作所 (3,635)
【Fターム(参考)】
【公開日】平成24年1月12日(2012.1.12)
【国際特許分類】
【出願日】平成22年6月24日(2010.6.24)
【出願人】(000006231)株式会社村田製作所 (3,635)
【Fターム(参考)】
[ Back to top ]