
無線機の方位検出装置
【課題】無線機の方位を電波の到来方向により検出する方位検出装置において、その近傍に反射物体が存在すると、反射波の影響により方位の検出精度が低下する。
【解決手段】記憶部28は電波の反射物体が存在する方位を示す反射角度範囲を記憶する。タグ解析手段42は電波の受信強度のピークに基づいて当該電波の到来方向を判定し無線タグ6の方位を検出する。タグ解析手段42は、受信強度の第1ピークに基づく到来方向が反射角度範囲内である場合には、受信強度の第2ピークに基づく到来方向の検出を試行し、その試行結果に応じて無線タグ6の方位を決定する。
【解決手段】記憶部28は電波の反射物体が存在する方位を示す反射角度範囲を記憶する。タグ解析手段42は電波の受信強度のピークに基づいて当該電波の到来方向を判定し無線タグ6の方位を検出する。タグ解析手段42は、受信強度の第1ピークに基づく到来方向が反射角度範囲内である場合には、受信強度の第2ピークに基づく到来方向の検出を試行し、その試行結果に応じて無線タグ6の方位を決定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、可搬型の無線機が存在する方位を検出する無線機方位検出装置に関する。
【背景技術】
【0002】
近年、無線タグを用いて人や物を識別するシステムが活用されている。例えば、家屋への侵入監視システムでは、監視エリアにて検出した人物が無線タグを携行しているか否かを判別することで不審者の検出を行う。
【0003】
このようなシステムでは人物(或いは物体)が無線タグを携行しているか否かは、人物の位置と無線タグの位置とが一致しているか否かに基づいて判断される。人物の位置は監視エリアを監視する画像センサやレーザセンサ等のセンサを利用することで検出可能である。無線タグの位置に関しては、下記特許文献1には、互いに受信範囲が異なる複数のタグリーダを配置し、それらのいずれで無線タグが検知されるかに基づいて無線タグの位置を求める技術が示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−003448号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
無線タグの位置に関しては、無線タグから受信した電波の強度・方向を解析して電波の到来方向を求め、当該方向を無線タグの方位と推定することもできる。タグリーダには無線タグから直接届く直接波以外に地面や壁など様々な物体での反射波が入射し得る。通常は、直接波は反射波よりも電波強度が大きいため、各方位から受信した電波のうち受信強度が大きい方位を無線タグの方位と定めることができる。
【0006】
しかし、地面等の反射波が直接波に干渉し、直接波の受信強度が大きく低下するマルチパスフェージングが生じることがある。このとき、タグリーダの近傍に壁などの電波に対する反射物体が存在すると、当該反射物体による反射波の受信強度が直接波の受信強度より大きくなり、反射波の到来方向を無線タグの方位として誤検出するおそれがある。
【0007】
本発明は上記問題点を解決するためになされたものであり、反射物体の影響を抑えて無線タグなどの無線機の方位を精度良く検出することを可能とする。
【課題を解決するための手段】
【0008】
本発明に係る無線機の方位検出装置は、可搬型の無線機が発する電波を受信して当該無線機が存在する方位を検出するものであって、前記電波の反射物体が存在する方位を示す反射角度範囲を記憶する記憶手段と、前記電波の受信強度のピークに基づいて当該電波の到来方向を判定し前記無線機の方位を検出する方位解析手段と、を有し、前記方位解析手段は、前記受信強度の第1ピークに基づく前記到来方向が前記反射角度範囲内である場合には、前記受信強度の第2ピークに基づく前記到来方向の検出を試行し、その試行結果に応じて前記無線機の方位を決定する。
【0009】
他の本発明に係る無線機の方位検出装置においては、前記方位解析手段は、前記反射角度範囲外にて前記第2ピークに基づく前記到来方向が検出された場合には、当該到来方向を前記無線機の方位とする。
【0010】
別の本発明に係る無線機の方位検出装置においては、前記記憶手段は、当該装置の所定の近傍範囲内に存在する前記反射物体についての前記反射角度範囲を記憶する。
【0011】
また別の本発明に係る無線機の方位検出装置においては、前記記憶手段は、当該装置の所定の近傍範囲内に存在し且つ当該装置の設置壁面に略直交する物体面を持つ前記反射物体についての前記反射角度範囲を記憶する。
【0012】
他の本発明に係る無線機の方位検出装置は、さらに、監視空間を水平面内の所定の角度ごとにレーザ走査して物体までの距離を測定する測距手段と、前記レーザ走査の走査角度及び前記距離からなる測距データに基づき前記物体面を検出し、当該物体面が存在する方位を包含する角度範囲を前記反射角度範囲として前記記憶部に記憶させる反射角度範囲設定手段と、を備える。
【0013】
さらに他の本発明に係る無線機の方位検出装置においては、前記反射角度範囲設定手段は、所定周期又は所定タイミングで前記反射物体の前記物体面の検出処理を実行して前記反射角度範囲を更新する。
【0014】
別の本発明に係る無線機の方位検出装置は、さらに、前記測距データに基づき、移動物体の存在及びその方位を検出する移動物体検出手段と、前記移動物体の検出方位と前記無線機の検出方位との一致性により当該移動物体と当該無線機との対応付けを行う対応付け手段と、前記無線機との対応付けがされない前記移動物体の存在に基づいて不審物体の存在を判定する異常判定手段と、を備える。
【発明の効果】
【0015】
本発明によれば、反射物体の影響を抑えて無線機の方位を精度良く検出することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明に係る方位検出装置である検知装置を含んで構成される不審者監視システムの概略の構成を示すブロック図である。
【図2】検知装置が設置される監視エリアの一例の模式的な平面図である。
【図3】タグ解析手段におけるタグ方位の解析処理を説明する概略のフロー図である。
【図4】検知装置が設置される監視エリアに存在する人物の位置及び無線タグからの電波の経路の例を示す模式的な平面図である。
【図5】図4に示す電波経路に対応した受信強度の模式的なグラフである。
【図6】リンク処理手段における処理を説明する概略のフロー図である。
【図7】リンク維持判定処理の一例の概略のフロー図である。
【図8】反射角度範囲設定手段における反射角度範囲の登録・更新処理の概略のフロー図である。
【発明を実施するための形態】
【0017】
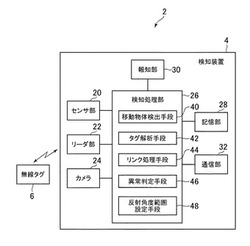
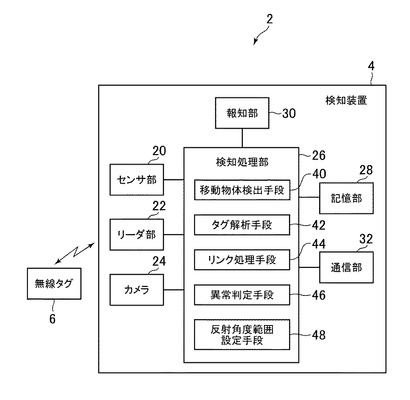
以下、本発明に係る、無線機の方位検出装置の実施の形態(以下実施形態という)について、図面に基づいて説明する。図1は、本発明に係る方位検出装置である検知装置を含んで構成される不審者監視システムの概略の構成を示すブロック図である。当該不審者監視システム2は、検知装置4及び無線タグ6を含んで構成される。
【0018】
不審者監視システム2は監視対象の物件に設置される。例えば、不審者監視システム2は監視対象の建物の外周の敷地内を監視する。より具体的には、例えば、戸建て家屋を監視対象とし、当該家屋の庭・アプローチを監視エリアとする。また、不審者監視システム2は屋内監視に用いることもでき、例えば、マンション、オフィスビル、ホテルなどのエントランスホールやロビーを監視エリアとすることができる。
【0019】
不審者監視システム2は、監視エリアに監視対象物件の居住者や従業員等といった正規利用者(以下、ユーザ)が存在し得る状態にて、当該監視エリアにおける移動物体(人物)を監視する。すなわち、夜間などユーザが監視エリアに存在しない状態にて警備開始の設定をしたり、ユーザが存在し得る状態では警備解除の操作をしたりする警備システムとは異なり、不審者監視システム2は警備解除などの操作を基本的には必要とせず、日中などユーザが存在し得る状態においても監視を行うことができるものである。不審者監視システム2は監視エリア内のユーザを含む人物を監視し、敷地内へ侵入した不審者や建物内に侵入した不審者が検出されると、異常通報信号と共に監視エリアの画像が警備センタ(図示せず)へ送られる。異常通報を受けた警備センタでは、送られた画像に基づいて監視員が状況を把握し警備員を派遣する等の適切な対処をとることができる。
【0020】
不審者監視システム2を構成する検知装置4は、監視対象の物件に1台又は複数台設置される。例えば、複数台の検知装置4からの検知結果を統合判定する監視装置を設け、当該監視装置を介して警備センタへの通報などの処理を行う構成とすることができる。監視対象物件のユーザには、ユーザであるかを識別可能とする無線機として例えば予め無線タグ6が付与され、ユーザは監視エリアではこれを携行する。検知装置4は監視エリア内の移動物体の位置を検出すると共に、無線タグの識別情報及び位置を取得する。
【0021】
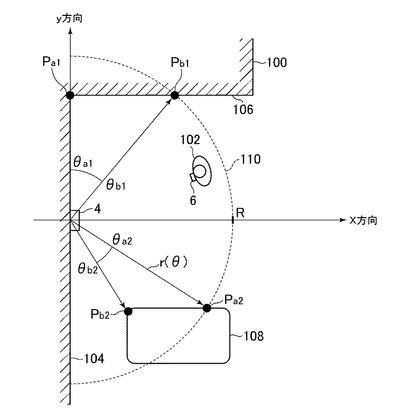
図2は検知装置4が設置される監視エリアの一例の模式的な平面図である。建物100の外周の敷地内が監視エリアとして設定される。検知装置4は例えば建物100の外壁に設置され、後述するセンサ部20から監視エリアへレーザパルスが照射され、移動物体である人物102の検出が行われる。また、検知装置4に設けられる後述のリーダ部22は無線タグ6が発する電波に基づいて当該無線タグ6の存在及び方位を検知する。
【0022】
図2に示す例では、例えば建物100はL字型に曲がり、検知装置4の設置位置から見て左側の近傍に、検知装置4が設置された外壁104に直交する壁106が存在している。また監視エリアには検知装置4から見て右側の近傍に自動車108が駐車している。例えば、これら壁106や自動車108は無線タグ6が発する電波に対する反射物体となる。
【0023】
続いて、図1を参照して検知装置4の構成を説明する。検知装置4は、センサ部20、リーダ部22、カメラ24、検知処理部26、記憶部28、報知部30及び通信部32を含んで構成される。
【0024】
センサ部20は監視エリアにおける人物の位置情報を検出する機能を有する。本実施形態ではセンサ部20はレーザ測距センサであり、レーザ光により監視エリアを走査してレーザ光を反射した物体の位置を検出する。例えば、センサ部20は波長890nm程度の近赤外光のレーザ光源を備え、光源からのレーザパルスを等速に回転駆動される走査鏡で反射してその出射方向を変え、監視エリアの全域に順次照射する。また、センサ部20は物体にて反射されたレーザパルスを受光して、当該物体までの測距データを生成する。レーザ光の走査はセンサ部20を中心として監視エリアを臨む角度範囲(例えば水平方向に180゜)に対して所定周期(例えば200ミリ秒)で繰り返される。測距は走査角度範囲内にて所定の角度ステップ(例えば0.25゜)ごとに飛行時間法(TOF法:Time of Flight)を用いて行われ、具体的にはレーザパルスの出射から受光までに要する時間を計測し、当該時間と光速度とからレーザを反射した物体までの距離が算定される。測距データは走査角(方位)と距離とで表され、検知装置4を視点とした物体の位置が当該測距データで与えられる。
【0025】
センサ部20は上述したレーザ測距センサには限定されず、例えば、マイクロ波やミリ波等の電波を使用するレーダセンサや、超音波を送受信する超音波センサ(ソナーセンサ)等でも同様に構成可能である。また、画像センサを用いて、背景差分やフレーム間差分により人物を抽出し、画像上の水平方向座標から人物の方位を求め、また監視エリアを斜め上方から撮影した画像における垂直方向座標から逆透視変換により人物までの距離を推定することで測距データを生成することもできる。
【0026】
上述したようにリーダ部22はユーザに付与される無線タグ6が発した電波を受信して、ユーザが携行する無線タグ6の存在を検知し、またその位置情報を取得する。無線タグ6は固有の識別情報(タグID)を記憶し、リーダ部22からの質問信号を受信すると、タグIDを含む応答信号を無線信号として送出する。本実施形態では無線タグ6は自身にバッテリを備えたアクティブ型のRFID(Radio Frequency IDentification)タグを用いて構成され、不審者監視システム2の比較的広い監視エリアにてリーダ部22との通信を可能とする。無線タグ6は例えば、900MHz帯等のUHFの帯域又は2.45GHz帯等のマイクロ波の帯域の周波数のものを用いることができる。なお、リーダからの電波を整流して電源とするパッシブ型のRFIDタグであっても数メートルの通信が可能なものがあり、監視エリアが比較的狭い場合にはパッシブタグを用いることも可能である。
【0027】
リーダ部22は監視エリアに質問信号を送出する。そして、リーダ部22はこれに反応して無線タグ6が発した応答信号を受信し、応答信号に含まれるタグIDを抽出することによりユーザの無線タグ6の存在を検知する。
【0028】
また、リーダ部22は受信した応答信号に基づいて無線タグ6の位置情報を検出するための構成を有する。検知装置4は無線タグ6の位置情報として、リーダ部22から見た無線タグ6が存在する方位を検出する。そのための構成の一例として、リーダ部22はそれぞれ比較的狭いビーム幅(例えば10゜)の指向性を有し互いにビーム方向をずらして配置された複数のアンテナを備え、それら複数のアンテナを切り替えて質問信号の送出及び応答信号の受信を行う。当該送受信が全方位(360゜)にて順次行われるようにリーダ部22は指向性を切り替え、所定周期(例えば200ミリ秒)ごとに全方向に対する無線タグ6の読み取りを完了する。リーダ部22は全方位に順次設定される指向角ごとに無線タグ6の応答信号の受信強度を取得し、タグIDごとに全方位での受信強度をまとめ、1周期分の受信データとして検知処理部26へ出力する。
【0029】
上述の例ではビーム方向をビーム幅に応じたステップで変化させるものである。つまりビーム幅が10゜程度であれば、ビーム間の多少のオーバーラップを設けつつ指向角はおよそ10゜刻みで設定される。しかし、ビーム方向の変化ステップはビーム幅より小さく設定することができ、これにより無線タグ6の存在する方位をビーム幅より小さい角度で求めることができる。
【0030】
なお、後述するリンク処理のために、測距データによる位置とタグデータによる位置(方位)との関係を予め定義しておく必要がある。好適には、センサ部20及びリーダ部22それぞれの視軸が実質的に一致するように、検知装置4内にてセンサ部20及びリーダ部22を互いに近づけて配置する。これによりセンサ部20の走査角とリーダ部22の指向角、すなわち測距データにおける角度(方位)と受信データの角度(方位)とを共通の座標系で表現できる。
【0031】
リーダ部22に設けるアンテナは指向性の向きを変えられる他の構成とすることができる。例えば、或る方向に強い指向性を有する単一のアンテナを回転させて指向角を変更する構成や、フェーズドアレイアンテナのように電子的制御により指向角を変える構成なども可能である。また、送信アンテナと受信アンテナとを設け、一方だけに鋭い指向性を持たせ、他方は例えば無指向性のような広い指向特性を持たせてもよい。
【0032】
リーダ部22は無線タグ6の位置情報として上述の例では方位を求めるが、さらに無線タグ6までの距離を求める構成とすることもできる。例えば、リーダ部22は質問信号の送出から応答信号の受信までの時間差に基づいて無線タグ6までの距離を求め、方位と当該距離とで二次元座標上の位置を決定することができる。
【0033】
カメラ24は監視エリアを撮影して画像を取得する。例えば、CCDイメージセンサやCMOSイメージセンサ等を用いて監視エリアの画像信号を生成する。カメラ24により撮影される画像は検知装置4から異常通報信号と共に警備センタへ送られ、警備センタの監視員が状況の把握に用いる。
【0034】
記憶部28は検知処理部26にて実行される各種プログラムやそれに必要なデータを格納される。また、記憶部28はユーザに付与されている無線タグ6のタグIDの情報(登録タグデータ)を記憶する。
【0035】
さらに、記憶部28は、無線タグ6が発する電波に対する反射物体が存在する方位を示す反射角度範囲を記憶する。ここで反射物体は当該物体での反射波が検知装置4でのタグ方位検知に影響を与える物とする。例えば、検知装置4の所定の近傍範囲内に存在し、且つ検知装置4の設置壁面(壁104)に略直交する物体面を持つ物体を反射物体とし、反射角度範囲は検知装置4から当該物体面を臨む角度範囲と定義することができる。図2に示す例では、検知装置4の所定近傍範囲として検知装置4から半径Rの円110が設定され、その範囲内の壁106及び自動車108について反射角度範囲が定義される。具体的には、壁106の位置Pa1からPb1までの壁面、及び自動車108の位置Pa2からPb2までの面が反射物体の物体面となり、それぞれの物体面を臨む角度範囲θa1〜θb1,θa2〜θb2が反射角度範囲θab1、反射角度範囲θab2として登録される。
【0036】
検知処理部26は、マイクロプロセッサ等を用いて構成され、実行されるプログラムに応じて、センサ部20が取得した測距データ、及びリーダ部22が検出したタグデータや無線タグ6の方位検出についての処理を行う。具体的には検知処理部26は移動物体検出手段40、タグ解析手段42、リンク処理手段44、異常判定手段46及び反射角度範囲設定手段48として機能する。
【0037】
移動物体検出手段40は監視エリアにおける移動物体の位置を検出する物体検出手段を構成する。移動物体検出手段40はセンサ部20から入力される測距データにおいて、所定以上の距離変化が生じた走査角のまとまり(距離変化群)を移動物体に対応するものとして抽出する。そして、距離変化群における距離及び走査角の分布から把握される移動物体の大きさが人を示す程度である場合に、当該移動物体を人物と判定し、当該人物を検出した方位及び距離を人物の位置とする。人物の位置(方位、距離)は例えば、距離変化群の中心の方位及び距離とする。
【0038】
複数の距離変化群が抽出された場合は、それぞれについて人物判定及び位置の検出を行う。検出した人物にはそれぞれ人物IDを付与する。移動物体検出手段40は前回の走査で検出した人物と今回の走査で検出した人物との大きさの類似度や位置関係を判定する等により、それら人物が同一であるかを判定する。例えば、位置関係に関しては、人物の移動距離と経過時間とから導かれる移動速度の妥当性を同一人物か否かの判定材料とすることができる。
【0039】
なお、人物の方位・距離は距離変化群の走査角・距離の分布範囲や、平均値など他の代表値で表してもよい。
【0040】
タグ解析手段42はリーダ部22と共に、監視エリアにおける無線タグ6の存在及びその位置を検出する手段を構成し、特に、位置を検出する手段に関し、無線タグ6からの電波の受信強度のピークに基づいて当該電波の到来方向を判定し無線タグ6が存在する方位を検出する方位解析手段を構成する。タグ解析手段42は、リーダ部22からタグIDごとに全方位での受信強度をまとめた受信データを入力される。タグ解析手段42は記憶部28の登録タグデータを参照し、検知されたタグIDが登録されたものである場合、方位に応じた受信強度の相違に基づいて、当該タグIDに対応する無線タグ6が存在する方位(タグ方位)を求める処理を行う。タグ解析手段42は基本処理として、受信強度の最大ピークの方向に基づいてタグ方位を求める。例えば、ここでは単純に最大ピークの方向がタグ方位と推定する。
【0041】
なお、ピーク方向に依存したタグ方位の推定方法はこれ以外のものであってもよい。例えば、最新の受信データでの最大ピークの方向と過去に推定されたタグ方位とを重み付け平均して最新のタグ方位としてもよい。これにより、検出誤差などによるタグ方位の変動を平滑化することができる。別の方法として、最大ピーク方向を含む受信強度の山(メインローブ)を抽出し、山の面積(ピーク面積)を2等分する方向、つまり中央値の方向をタグ方位と定めることもできる。また、山が位置する方位範囲の中央、つまり平均値の方向をタグ方位と定めることもできる。
【0042】
また、各方向の受信強度の分布をパターン解析してタグ方位を推定することもできる。例えば、タグリーダの分解能が30°(つまり、0〜360°を12方向に分割)の場合、12方向の受信強度を例えば円形グラフで表し、そのグラフの形状を解析し、より詳細な分解能(例えば5°単位)でタグ方位を決定する。
【0043】
なお、最大ピークの位置の求め方として、受信強度にて当該ピークの概略の位置を求め、次にその両側で強度が0(又は極小)となる点を探索し、そして、最大ピークの両側の点として得られた2つの受信強度の極小点の中点を最大ピークの位置と推定する方法(ヌル走査方式)もある。
【0044】
上述のようにタグ解析手段42は基本処理としては、受信強度の最大ピーク(第1ピーク)の方向に基づいてタグ方位を求めるが、当該第1ピークに基づく電波到来方向が記憶部28に記憶されている反射角度範囲内である場合には、受信強度の2番目に大きなピーク(第2ピーク)に基づく電波到来方向の検出を試行し、その試行結果に応じて無線タグ6の方位を決定する。
【0045】
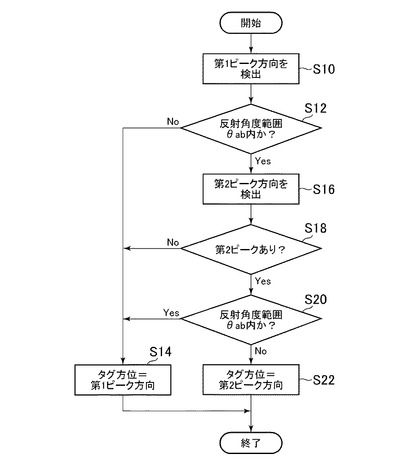
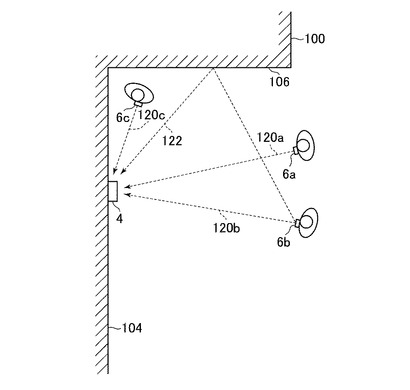
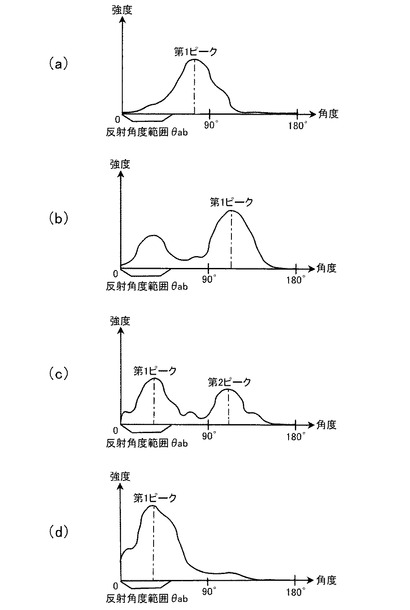
図3はタグ解析手段42におけるタグ方位の解析処理を説明する概略のフロー図である。また図4は検知装置4が設置される監視エリアに存在する人物の位置及び無線タグ6からの電波の経路の例を示す模式的な平面図である。図5は図4に示す電波経路に対応した受信強度の模式的なグラフであり、縦軸が受信強度、横軸が検知装置4から見た方向を表す角度である。当該角度は検知装置4の正面を90°とし、左横を0°、右横を180°としており、図4に示す検知装置4の左側の壁106が存在する方向が反射角度範囲θabとなっている。
【0046】
タグ解析手段42は、リーダ部22にて登録された無線タグ6が検知された場合、各無線タグ6について図3の方位解析処理を実行する。タグ解析手段42は検知された無線タグ6からの電波の到来方向を受信強度が最大である第1ピークに基づいて検出する(S10)。ステップS10で検出した第1ピークの方位(第1ピーク方向)が反射角度範囲θab外であれば(S12にて「No」及び、図5(a),(b)の場合)、当該方位は無線タグ6からの直接波の到来方向と推定されることから、当該第1ピーク方向をタグ方位と定める(S14)。図5(a)は図4の無線タグ6aの場合に当たり、直接波120aの到来方向に基づいて無線タグ6aの方位が検知される。また図5(b)は図4の無線タグ6bの直接波120bが反射波122より強い場合に当たり、直接波120bの到来方向に基づいて無線タグ6bの方位が検知される。
【0047】
一方、第1ピーク方向が反射角度範囲θab内の場合は(S12にて「Yes」の場合)、反射物体による反射波の可能性があるので、タグ解析手段42は受信強度が第1ピークの次に大きい第2ピークの方位(第2ピーク方向)の検出を試行する(S16)。その結果、図5(c)に示すように、他の方向と比較して受信強度に有意な信号強度差を有する第2ピークが存在し(S18にて「Yes」の場合)、かつ第2ピーク方向が反射角度範囲θab外であれば(S20にて「No」の場合)、第1ピーク方向は反射波であったと推定し、第2ピーク方向をタグ方位と定める(S22)。これは図4の無線タグ6bの場合に当たり、反射波122が直接波120bより強い場合であっても、第2ピークをなす直接波120bの到来方向に基づいて無線タグ6bの方位が検知される。
【0048】
第2ピーク方向の検出を試みた結果、第2ピークが存在しない場合(S18にて「No」の場合)や、第2ピーク方向が反射角度範囲θab内である場合(S20にて「Yes」の場合)は、第1ピーク方向は反射波ではなく直接波であると判断し、第1ピーク方向をタグ方位とする(S14)。これは図5(d)及び図4の無線タグ6cの場合に相当し、直接波120cの到来方向に基づいて壁106の手前に位置する無線タグ6cの方位が検知される。
【0049】
リンク処理手段44は、移動物体検出手段40により検出された人物の位置情報と、タグ解析手段42により検出された無線タグ6の位置情報とを照合して移動物体に対応する無線タグ6を求める対応付け手段として機能する。本実施形態では、リンク処理手段44は無線タグ6が検知されている場合、人物の位置を特定する情報に含まれる方位(人物の方位)と無線タグ6の方位とを比較し、その一致性が認められれば、人物と無線タグ6とを対応付ける(リンク成立)。一方、一致性が認められない場合や、無線タグ6が検知されていない場合は対応付けしない(リンク失敗)。
【0050】
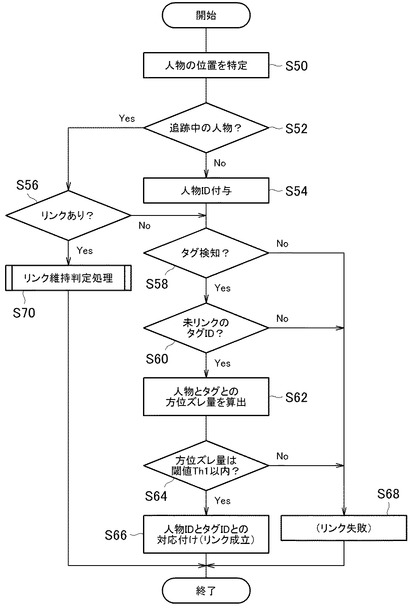
図6はリンク処理手段44における処理を説明する概略のフロー図である。移動物体検出手段40は人物の位置を特定し(S50)、当該人物が追跡中の人物でない、つまり今回のセンサ部20の走査で新たに検出された人物である場合には(S52にて「No」の場合)、当該人物に人物IDを付与し(S54)リンク設定を試みる(S58〜S68)。一方、追跡中の人物である、つまり人物IDを既に付与されている人物である場合には(S52にて「Yes」の場合)、リンク処理手段44が当該人物IDについてリンクが存在するか否か、つまり無線タグ6と対応付けされているか否かを判定する(S56)。追跡中であるがリンクが存在しない場合は(S56にて「No」の場合)リンク設定を試みる(S58〜S68)。
【0051】
リンクが存在しない場合(S52及びS56にて「No」の場合)は、リンク処理手段44はタグ解析手段42により無線タグ6が検出されており(S58にて「Yes」の場合)、かつ当該無線タグ6のタグIDに対してリンクが設定されていない場合(S60にて「Yes」の場合)、人物の方位と無線タグ6の方位との相違量(方位ズレ量)を算出する(S62)。そして、方位ズレ量が所定の閾値Th1以内であれば(S64にて「Yes」の場合)、リンク処理の対象としている人物に付与されている人物IDに当該無線タグ6のタグIDを対応付け、これにより新たなリンクが設定される(S66)。
【0052】
一方、監視エリアに無線タグ6が検知されていない場合(S58にて「No」の場合)や無線タグ6は検知されているが未リンクのものはない場合(S60にて「No」の場合)、また方位ズレ量が閾値Th1を超えている場合は(S64にて「No」の場合)リンクを設定することができないか、設定することが不適切である場合である。よって、これらの場合はリンク失敗の場合として、リンク処理手段44は処理対象の人物に対してリンクを設定しない(S68)。
【0053】
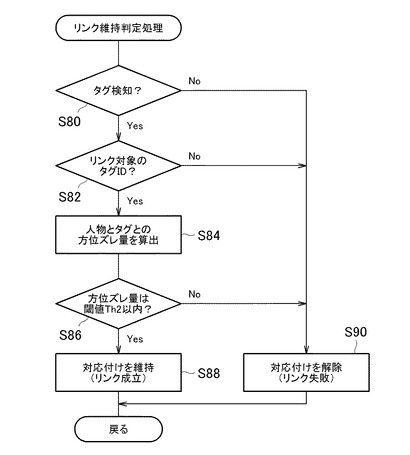
リンク処理手段44は処理対象の人物に前回の処理にてリンクが設定されている場合(S56にて「Yes」の場合)、リンク維持判定処理S70を行う。リンク維持判定処理S70は、無線タグ6の検出誤差が比較的大きいことに配慮した処理であり、一旦リンクを設定した人物と無線タグ6に対しては以降のリンク処理において一致判定の基準を緩和してリンク切れが頻繁に発生する事態を回避する。
【0054】
図7はリンク維持判定処理S70の一例の概略のフロー図であり、リンク処理手段44はリンクが存在する場合には、リンクが存在しない場合の処理S58〜S68に代えて、リンク維持判定処理S70を実行する。具体的には、リンク処理手段44はリンク維持の判定対象の無線タグ6のタグIDがタグ解析手段42により検出されており(S80及びS82にて「Yes」の場合)、リンク維持の判定対象の人物及び無線タグ6についての方位ズレ量を算出する(S84)。そして、方位ズレ量がTh2>Th1に設定される閾値Th2以内であれば(S86にて「Yes」の場合)、リンク維持の判定対象の人物と無線タグ6との間にリンクが成立すると判定し、両者の対応付けを維持する(S88)。一方、監視エリアに無線タグ6が検知されていない場合(S80にて「No」の場合)や無線タグ6は検知されているがリンク維持判定の対象のタグIDは検知されていない場合(S82にて「No」の場合)、また方位ズレ量が閾値Th2を超えている場合は(S86にて「No」の場合)はリンク失敗とすべき状態であり、維持するかの判定対象としている対応付けを解除する(S90)。例えば閾値Th1は5゜とし、Th2は8゜に設定することができる。
【0055】
リンク処理手段44は上述のリンク処理を監視エリアにて検出された人物ごとに行う。
【0056】
なお、上述した無線タグ6の二次元座標を求める構成では、方位の一致性に代えて二次元座標の一致性に基づいてリンク処理を行う。すなわち、方位及び距離で与えられる人物の位置と無線タグ6の二次元座標で表される位置との距離をズレ量として判定処理S64,S86を行う。
【0057】
異常判定手段46は、監視エリアにおいて検出された人物が無線タグ6と対応付けされているか否かに基づき当該人物がユーザであるか否かを識別し、侵入異常の判定を行う。具体的には、異常判定手段46は移動物体検出手段40にて検出された人物の位置の変化を追跡すると共に、当該人物についてのリンク処理手段44による無線タグ6との対応付け結果を取得する。そして、無線タグ6と対応付けされていない人物(不審者候補)が監視エリア内に所定時間継続して存在する場合、当該人物を敷地内での不正滞留者とみなし、外周侵入異常と判定する。また、監視エリアから監視対象の建物側に移動した不審者候補を検出した場合、当該人物を建物への不正侵入者とみなし、建物侵入異常と判定する。異常判定手段46は、外周侵入異常又は建物侵入異常を判定すると、報知部30により異常発生を周囲に報知すると共に、通信部32を介して遠隔の警備センタへ異常発生を通報する。
【0058】
反射角度範囲設定手段48は、センサ部20によるレーザ走査の走査角度及び距離測定値からなる測距データに基づき監視エリアに存在する反射物体の物体面を検出し、当該物体面が存在する方位を包含する角度範囲を反射角度範囲θabとして記憶部28に記憶させる。
【0059】
反射角度範囲設定手段48は所定周期又は所定タイミングで反射物体の物体面の検出処理を実行して反射角度範囲θabを更新する。例えば、反射角度範囲設定手段48は初期設定の際、及び監視動作中の一定時間ごと(例えば10秒ごと)に反射角度範囲θabの解析・更新処理を実行する。
【0060】
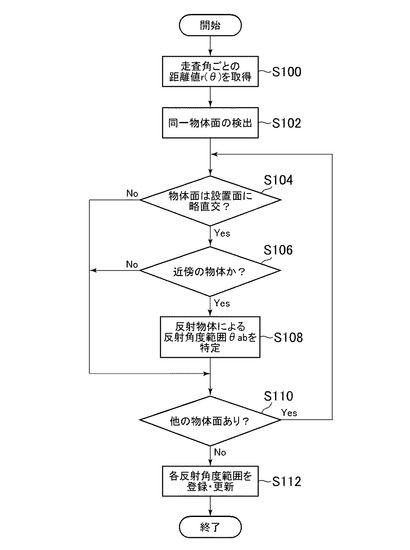
図8は反射角度範囲設定手段48における反射角度範囲θabの登録・更新処理の概略のフロー図である。反射角度範囲設定手段48は測距データから走査角ごとの距離値r(θ)を取得する(S100)。ここでr(θ)は最新の測距データの値を用いる構成とすることもできるし、数周期分の平均値を用いる構成とすることもできる。また、反射物体として登録すべき物体は基本的に、監視対象とする移動物体である人物に対して背景として存在する静止物体である。よって、一定期間、距離値が安定している走査角のみを後述の物体面の検出処理の対象としてもよい。
【0061】
反射角度範囲設定手段48は走査角ごとの距離値r(θ)に基づいて同一物体面の検出処理を行う(S102)。例えば、走査角が隣接する所定数の距離値r(θ)を抽出し、それらが表す監視エリア内での座標群(点群)について回帰直線を推定する。当該回帰直線について最小二乗法による二乗誤差が閾値未満か否かを判定し、閾値未満であれば、抽出した座標群は回帰直線に沿った平面を構成すると判断し、閾値以上であれば平面を構成しないと判断する。ここでは、検知装置4を原点とし、検知装置4の設置面(図2の例では壁104)に平行にy軸を設定し、検知装置4の正面方向(設置面と直交する視軸方向)をx軸に設定し、回帰直線を“y=ax+b”と表す。
【0062】
1回に抽出する距離値の個数は例えば、座標群のうち走査角θが最小のものが表す座標と最大のものが表す座標との距離が1m相当になるように調整され、これにより反射物体の表面の一部をなす1mに応じた長さの平面が同一物体面として検出される。反射角度範囲設定手段48は座標群を順次ずらして上記処理を繰り返し、これにより監視エリア内の反射物体の表面を構成する同一物体面の集合が得られる。なお、順次抽出する座標群のθの範囲は互いに一部をオーバーラップさせることができ、例えば、1m相当の座標群を抽出する場合に0.5mずつずらして順次、座標群を抽出することができる。
【0063】
なお、隣接する走査角にて距離値r(θ)の差が所定値以下である測定点の連鎖を探索し、当該連鎖の長さが所定値(例えば1m)以上であればその連鎖を形成する座標群を処理結果の同一物体面として抽出してもよい。
【0064】
次に反射角度範囲設定手段48は、抽出した各物体面が検知装置4の設置面に略直交し(S104)、且つ検知装置4の近傍に位置する物体のものであるか(S106)を調べ、当該条件を満たす場合(S104及びS106にて「Yes」の場合)は当該物体面が検知装置4でのタグ方位検知に影響を与える反射物体に該当するとして反射角度範囲θabを求める(S108)。
【0065】
物体面が検知装置4の設置面に略直交しているか否かの判定処理S104は例えば、回帰直線の傾きaの絶対値に基づいて行うことができ、傾きaが予め設定した閾値未満であれば略直交であると判断する。
【0066】
処理対象の物体面が検知装置4の近傍に存在するか否かの判定処理S106は例えば、当該物体面のうち検知装置4から最も遠い測距点の距離値r(θ)に基づいて行うことができ、距離値r(θ)が所定距離R以内であれば、その物体面(1m相当)は近傍であると判断する。例えばRは3m程度に設定することができる。
【0067】
なお、処理S106では設置面に略直交している物体面を処理対象としているので、基本的に物体面をなす測距点のうち走査角θが最も90°(x軸方向)に近い点が最も遠い測距点となる。よって、測距点のうちそのθと90°との差の絶対値が最小となる点の距離値r(θ)をRと比較して近傍判定を行っても良い。
【0068】
また、検知装置4から物体面に沿う回帰直線(y=ax+b)への垂線の長さや、当該回帰直線のy切片bや、或いは最も90°側の測距点の距離値と走査角とから定まる距離y(r,θ)が所定値以下であることに基づいて近傍判定を行う構成とすることもできる。
【0069】
また、処理S100やS102にて予め処理対象の距離値r(θ)を所定距離R以下に制限して物体面の検出処理を行うこととし、近傍判定処理S106を省略することもできる。
【0070】
反射角度範囲設定手段48は、判定処理S104及びS106の条件を満たす物体面について反射角度範囲θabを求める(S108)。具体的には、当該物体面の両端の走査角度をθa,θbとし角度範囲θa〜θbを当該物体面の反射角度範囲θabとする(S108)。なお、上記条件を満たさない物体面(S104又はS106にて「No」の場合)については反射角度範囲θabは定めない。
【0071】
反射角度範囲設定手段48は処理S102で検出した物体面のうち未処理の物体面があれば(S110にて「Yes」)、当該物体面について処理S104〜S108を行い、全ての物体面について当該処理が終了すると(S110にて「No」)、処理S108にて求められた反射角度範囲θabを記憶部28に登録、更新する処理を行う(S112)。その際、複数の反射角度範囲θabが連続する場合には、それらを統合して1つの反射角度範囲θabとし、これを記憶部28に記憶させることができる。
【0072】
なお、上述した物体面の検出処理S102をθ=90°から0°に向かう方向、及びθ=90°から180°に向かう方向にそれぞれ行い、それら各方向にて1つの物体面が検出された時点で当該物体面について処理S104〜S108を行ってもよい。この場合、反射物体とみなせる、すなわち設置面に略直交し且つ検知装置4の近傍に存在する物体面が検出された時点で反射物体の探索を終了し、当該物体面の方位を含む角度範囲を、反射角度範囲θabとして登録することができる。具体的には、検出された物体面の遠方側(90°寄り)の端部の角度θb又はθaを用いて0°〜θb又はθa〜180°を反射角度範囲θabと定義する。この定義では、反射角度範囲θab内には実際には反射物体が存在しない設置面側の方位も含まれ得るが、基本的には第2ピーク検出処理等が余分に行われるだけであって、高精度でのタグ方位の検出には影響しない。
【0073】
上述した処理では、反射物体の物体面は設置面に略直交するという条件を課したが、検知装置4の近傍の物体という条件だけとしてもよい。また、設置面に略直交との条件に代えて、検知装置4に対向しない物体面、又は検知装置4の側方に位置する物体面との条件としてもよい。
【0074】
以上のように、検知装置4はタグ解析手段42により、反射物体からの反射波の影響を考慮してタグ方位を検出するので、検出精度の向上が図られる。また、無線タグ6の方位解析に影響がある壁などの反射物体の位置(角度範囲)を自動検出し、これによりタグ方位検出の精度が確保される。さらに反射物体の位置を初期設定時に登録するだけでなく監視動作中も随時更新するので、監視エリアの状況が変化してもタグ方位検出の精度が維持される。例えば、駐車している自動車の移動などの状況の変化が生じてもタグ方位を高精度に検出可能である。
【0075】
検知装置4はLAN(Local Area Network)やその他の通信網で監視装置又は警備センタと接続される構成としており、検知装置4に設けられる通信部32は監視装置や警備センタとの通信インターフェースである。
【0076】
また、報知部30は異常検知時の警報を出力するスピーカ等である。例えば、異常判定手段46が報知部30を動作させる。また、通信部32を介して検知処理部26が警備センタや監視装置から指示を受けて報知部30を動作させる構成とすることもできる。
【0077】
上述の実施形態では、無線タグ6はリーダ部22からの質問信号を受けて応答信号を発するものとしたが、無線タグ6は一定周期或いは振動検知時に自発的に発信するものとしてもよい。
【0078】
以上、実施形態により説明した本発明では、監視エリアにて検出した人物と無線タグ6との位置を照合して当該人物と無線タグ6とを対応付けする。これにより、監視エリア内のどの人物がどの無線タグ6を所持しているかが的確に把握される。さらに本発明では、無線タグ6が発する電波の反射物体での反射の影響を考慮して、無線タグ6の方位を決定するので、人物と無線タグ6との対応付けの精度が向上する。
【符号の説明】
【0079】
2 不審者監視システム、4 検知装置、6 無線タグ、20 センサ部、22 リーダ部、24 カメラ、26 検知処理部、28 記憶部、30 報知部、32 通信部、40 移動物体検出手段、42 タグ解析手段、44 リンク処理手段、46 異常判定手段、48 反射角度範囲設定手段。
【技術分野】
【0001】
本発明は、可搬型の無線機が存在する方位を検出する無線機方位検出装置に関する。
【背景技術】
【0002】
近年、無線タグを用いて人や物を識別するシステムが活用されている。例えば、家屋への侵入監視システムでは、監視エリアにて検出した人物が無線タグを携行しているか否かを判別することで不審者の検出を行う。
【0003】
このようなシステムでは人物(或いは物体)が無線タグを携行しているか否かは、人物の位置と無線タグの位置とが一致しているか否かに基づいて判断される。人物の位置は監視エリアを監視する画像センサやレーザセンサ等のセンサを利用することで検出可能である。無線タグの位置に関しては、下記特許文献1には、互いに受信範囲が異なる複数のタグリーダを配置し、それらのいずれで無線タグが検知されるかに基づいて無線タグの位置を求める技術が示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−003448号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
無線タグの位置に関しては、無線タグから受信した電波の強度・方向を解析して電波の到来方向を求め、当該方向を無線タグの方位と推定することもできる。タグリーダには無線タグから直接届く直接波以外に地面や壁など様々な物体での反射波が入射し得る。通常は、直接波は反射波よりも電波強度が大きいため、各方位から受信した電波のうち受信強度が大きい方位を無線タグの方位と定めることができる。
【0006】
しかし、地面等の反射波が直接波に干渉し、直接波の受信強度が大きく低下するマルチパスフェージングが生じることがある。このとき、タグリーダの近傍に壁などの電波に対する反射物体が存在すると、当該反射物体による反射波の受信強度が直接波の受信強度より大きくなり、反射波の到来方向を無線タグの方位として誤検出するおそれがある。
【0007】
本発明は上記問題点を解決するためになされたものであり、反射物体の影響を抑えて無線タグなどの無線機の方位を精度良く検出することを可能とする。
【課題を解決するための手段】
【0008】
本発明に係る無線機の方位検出装置は、可搬型の無線機が発する電波を受信して当該無線機が存在する方位を検出するものであって、前記電波の反射物体が存在する方位を示す反射角度範囲を記憶する記憶手段と、前記電波の受信強度のピークに基づいて当該電波の到来方向を判定し前記無線機の方位を検出する方位解析手段と、を有し、前記方位解析手段は、前記受信強度の第1ピークに基づく前記到来方向が前記反射角度範囲内である場合には、前記受信強度の第2ピークに基づく前記到来方向の検出を試行し、その試行結果に応じて前記無線機の方位を決定する。
【0009】
他の本発明に係る無線機の方位検出装置においては、前記方位解析手段は、前記反射角度範囲外にて前記第2ピークに基づく前記到来方向が検出された場合には、当該到来方向を前記無線機の方位とする。
【0010】
別の本発明に係る無線機の方位検出装置においては、前記記憶手段は、当該装置の所定の近傍範囲内に存在する前記反射物体についての前記反射角度範囲を記憶する。
【0011】
また別の本発明に係る無線機の方位検出装置においては、前記記憶手段は、当該装置の所定の近傍範囲内に存在し且つ当該装置の設置壁面に略直交する物体面を持つ前記反射物体についての前記反射角度範囲を記憶する。
【0012】
他の本発明に係る無線機の方位検出装置は、さらに、監視空間を水平面内の所定の角度ごとにレーザ走査して物体までの距離を測定する測距手段と、前記レーザ走査の走査角度及び前記距離からなる測距データに基づき前記物体面を検出し、当該物体面が存在する方位を包含する角度範囲を前記反射角度範囲として前記記憶部に記憶させる反射角度範囲設定手段と、を備える。
【0013】
さらに他の本発明に係る無線機の方位検出装置においては、前記反射角度範囲設定手段は、所定周期又は所定タイミングで前記反射物体の前記物体面の検出処理を実行して前記反射角度範囲を更新する。
【0014】
別の本発明に係る無線機の方位検出装置は、さらに、前記測距データに基づき、移動物体の存在及びその方位を検出する移動物体検出手段と、前記移動物体の検出方位と前記無線機の検出方位との一致性により当該移動物体と当該無線機との対応付けを行う対応付け手段と、前記無線機との対応付けがされない前記移動物体の存在に基づいて不審物体の存在を判定する異常判定手段と、を備える。
【発明の効果】
【0015】
本発明によれば、反射物体の影響を抑えて無線機の方位を精度良く検出することが可能となる。
【図面の簡単な説明】
【0016】
【図1】本発明に係る方位検出装置である検知装置を含んで構成される不審者監視システムの概略の構成を示すブロック図である。
【図2】検知装置が設置される監視エリアの一例の模式的な平面図である。
【図3】タグ解析手段におけるタグ方位の解析処理を説明する概略のフロー図である。
【図4】検知装置が設置される監視エリアに存在する人物の位置及び無線タグからの電波の経路の例を示す模式的な平面図である。
【図5】図4に示す電波経路に対応した受信強度の模式的なグラフである。
【図6】リンク処理手段における処理を説明する概略のフロー図である。
【図7】リンク維持判定処理の一例の概略のフロー図である。
【図8】反射角度範囲設定手段における反射角度範囲の登録・更新処理の概略のフロー図である。
【発明を実施するための形態】
【0017】
以下、本発明に係る、無線機の方位検出装置の実施の形態(以下実施形態という)について、図面に基づいて説明する。図1は、本発明に係る方位検出装置である検知装置を含んで構成される不審者監視システムの概略の構成を示すブロック図である。当該不審者監視システム2は、検知装置4及び無線タグ6を含んで構成される。
【0018】
不審者監視システム2は監視対象の物件に設置される。例えば、不審者監視システム2は監視対象の建物の外周の敷地内を監視する。より具体的には、例えば、戸建て家屋を監視対象とし、当該家屋の庭・アプローチを監視エリアとする。また、不審者監視システム2は屋内監視に用いることもでき、例えば、マンション、オフィスビル、ホテルなどのエントランスホールやロビーを監視エリアとすることができる。
【0019】
不審者監視システム2は、監視エリアに監視対象物件の居住者や従業員等といった正規利用者(以下、ユーザ)が存在し得る状態にて、当該監視エリアにおける移動物体(人物)を監視する。すなわち、夜間などユーザが監視エリアに存在しない状態にて警備開始の設定をしたり、ユーザが存在し得る状態では警備解除の操作をしたりする警備システムとは異なり、不審者監視システム2は警備解除などの操作を基本的には必要とせず、日中などユーザが存在し得る状態においても監視を行うことができるものである。不審者監視システム2は監視エリア内のユーザを含む人物を監視し、敷地内へ侵入した不審者や建物内に侵入した不審者が検出されると、異常通報信号と共に監視エリアの画像が警備センタ(図示せず)へ送られる。異常通報を受けた警備センタでは、送られた画像に基づいて監視員が状況を把握し警備員を派遣する等の適切な対処をとることができる。
【0020】
不審者監視システム2を構成する検知装置4は、監視対象の物件に1台又は複数台設置される。例えば、複数台の検知装置4からの検知結果を統合判定する監視装置を設け、当該監視装置を介して警備センタへの通報などの処理を行う構成とすることができる。監視対象物件のユーザには、ユーザであるかを識別可能とする無線機として例えば予め無線タグ6が付与され、ユーザは監視エリアではこれを携行する。検知装置4は監視エリア内の移動物体の位置を検出すると共に、無線タグの識別情報及び位置を取得する。
【0021】
図2は検知装置4が設置される監視エリアの一例の模式的な平面図である。建物100の外周の敷地内が監視エリアとして設定される。検知装置4は例えば建物100の外壁に設置され、後述するセンサ部20から監視エリアへレーザパルスが照射され、移動物体である人物102の検出が行われる。また、検知装置4に設けられる後述のリーダ部22は無線タグ6が発する電波に基づいて当該無線タグ6の存在及び方位を検知する。
【0022】
図2に示す例では、例えば建物100はL字型に曲がり、検知装置4の設置位置から見て左側の近傍に、検知装置4が設置された外壁104に直交する壁106が存在している。また監視エリアには検知装置4から見て右側の近傍に自動車108が駐車している。例えば、これら壁106や自動車108は無線タグ6が発する電波に対する反射物体となる。
【0023】
続いて、図1を参照して検知装置4の構成を説明する。検知装置4は、センサ部20、リーダ部22、カメラ24、検知処理部26、記憶部28、報知部30及び通信部32を含んで構成される。
【0024】
センサ部20は監視エリアにおける人物の位置情報を検出する機能を有する。本実施形態ではセンサ部20はレーザ測距センサであり、レーザ光により監視エリアを走査してレーザ光を反射した物体の位置を検出する。例えば、センサ部20は波長890nm程度の近赤外光のレーザ光源を備え、光源からのレーザパルスを等速に回転駆動される走査鏡で反射してその出射方向を変え、監視エリアの全域に順次照射する。また、センサ部20は物体にて反射されたレーザパルスを受光して、当該物体までの測距データを生成する。レーザ光の走査はセンサ部20を中心として監視エリアを臨む角度範囲(例えば水平方向に180゜)に対して所定周期(例えば200ミリ秒)で繰り返される。測距は走査角度範囲内にて所定の角度ステップ(例えば0.25゜)ごとに飛行時間法(TOF法:Time of Flight)を用いて行われ、具体的にはレーザパルスの出射から受光までに要する時間を計測し、当該時間と光速度とからレーザを反射した物体までの距離が算定される。測距データは走査角(方位)と距離とで表され、検知装置4を視点とした物体の位置が当該測距データで与えられる。
【0025】
センサ部20は上述したレーザ測距センサには限定されず、例えば、マイクロ波やミリ波等の電波を使用するレーダセンサや、超音波を送受信する超音波センサ(ソナーセンサ)等でも同様に構成可能である。また、画像センサを用いて、背景差分やフレーム間差分により人物を抽出し、画像上の水平方向座標から人物の方位を求め、また監視エリアを斜め上方から撮影した画像における垂直方向座標から逆透視変換により人物までの距離を推定することで測距データを生成することもできる。
【0026】
上述したようにリーダ部22はユーザに付与される無線タグ6が発した電波を受信して、ユーザが携行する無線タグ6の存在を検知し、またその位置情報を取得する。無線タグ6は固有の識別情報(タグID)を記憶し、リーダ部22からの質問信号を受信すると、タグIDを含む応答信号を無線信号として送出する。本実施形態では無線タグ6は自身にバッテリを備えたアクティブ型のRFID(Radio Frequency IDentification)タグを用いて構成され、不審者監視システム2の比較的広い監視エリアにてリーダ部22との通信を可能とする。無線タグ6は例えば、900MHz帯等のUHFの帯域又は2.45GHz帯等のマイクロ波の帯域の周波数のものを用いることができる。なお、リーダからの電波を整流して電源とするパッシブ型のRFIDタグであっても数メートルの通信が可能なものがあり、監視エリアが比較的狭い場合にはパッシブタグを用いることも可能である。
【0027】
リーダ部22は監視エリアに質問信号を送出する。そして、リーダ部22はこれに反応して無線タグ6が発した応答信号を受信し、応答信号に含まれるタグIDを抽出することによりユーザの無線タグ6の存在を検知する。
【0028】
また、リーダ部22は受信した応答信号に基づいて無線タグ6の位置情報を検出するための構成を有する。検知装置4は無線タグ6の位置情報として、リーダ部22から見た無線タグ6が存在する方位を検出する。そのための構成の一例として、リーダ部22はそれぞれ比較的狭いビーム幅(例えば10゜)の指向性を有し互いにビーム方向をずらして配置された複数のアンテナを備え、それら複数のアンテナを切り替えて質問信号の送出及び応答信号の受信を行う。当該送受信が全方位(360゜)にて順次行われるようにリーダ部22は指向性を切り替え、所定周期(例えば200ミリ秒)ごとに全方向に対する無線タグ6の読み取りを完了する。リーダ部22は全方位に順次設定される指向角ごとに無線タグ6の応答信号の受信強度を取得し、タグIDごとに全方位での受信強度をまとめ、1周期分の受信データとして検知処理部26へ出力する。
【0029】
上述の例ではビーム方向をビーム幅に応じたステップで変化させるものである。つまりビーム幅が10゜程度であれば、ビーム間の多少のオーバーラップを設けつつ指向角はおよそ10゜刻みで設定される。しかし、ビーム方向の変化ステップはビーム幅より小さく設定することができ、これにより無線タグ6の存在する方位をビーム幅より小さい角度で求めることができる。
【0030】
なお、後述するリンク処理のために、測距データによる位置とタグデータによる位置(方位)との関係を予め定義しておく必要がある。好適には、センサ部20及びリーダ部22それぞれの視軸が実質的に一致するように、検知装置4内にてセンサ部20及びリーダ部22を互いに近づけて配置する。これによりセンサ部20の走査角とリーダ部22の指向角、すなわち測距データにおける角度(方位)と受信データの角度(方位)とを共通の座標系で表現できる。
【0031】
リーダ部22に設けるアンテナは指向性の向きを変えられる他の構成とすることができる。例えば、或る方向に強い指向性を有する単一のアンテナを回転させて指向角を変更する構成や、フェーズドアレイアンテナのように電子的制御により指向角を変える構成なども可能である。また、送信アンテナと受信アンテナとを設け、一方だけに鋭い指向性を持たせ、他方は例えば無指向性のような広い指向特性を持たせてもよい。
【0032】
リーダ部22は無線タグ6の位置情報として上述の例では方位を求めるが、さらに無線タグ6までの距離を求める構成とすることもできる。例えば、リーダ部22は質問信号の送出から応答信号の受信までの時間差に基づいて無線タグ6までの距離を求め、方位と当該距離とで二次元座標上の位置を決定することができる。
【0033】
カメラ24は監視エリアを撮影して画像を取得する。例えば、CCDイメージセンサやCMOSイメージセンサ等を用いて監視エリアの画像信号を生成する。カメラ24により撮影される画像は検知装置4から異常通報信号と共に警備センタへ送られ、警備センタの監視員が状況の把握に用いる。
【0034】
記憶部28は検知処理部26にて実行される各種プログラムやそれに必要なデータを格納される。また、記憶部28はユーザに付与されている無線タグ6のタグIDの情報(登録タグデータ)を記憶する。
【0035】
さらに、記憶部28は、無線タグ6が発する電波に対する反射物体が存在する方位を示す反射角度範囲を記憶する。ここで反射物体は当該物体での反射波が検知装置4でのタグ方位検知に影響を与える物とする。例えば、検知装置4の所定の近傍範囲内に存在し、且つ検知装置4の設置壁面(壁104)に略直交する物体面を持つ物体を反射物体とし、反射角度範囲は検知装置4から当該物体面を臨む角度範囲と定義することができる。図2に示す例では、検知装置4の所定近傍範囲として検知装置4から半径Rの円110が設定され、その範囲内の壁106及び自動車108について反射角度範囲が定義される。具体的には、壁106の位置Pa1からPb1までの壁面、及び自動車108の位置Pa2からPb2までの面が反射物体の物体面となり、それぞれの物体面を臨む角度範囲θa1〜θb1,θa2〜θb2が反射角度範囲θab1、反射角度範囲θab2として登録される。
【0036】
検知処理部26は、マイクロプロセッサ等を用いて構成され、実行されるプログラムに応じて、センサ部20が取得した測距データ、及びリーダ部22が検出したタグデータや無線タグ6の方位検出についての処理を行う。具体的には検知処理部26は移動物体検出手段40、タグ解析手段42、リンク処理手段44、異常判定手段46及び反射角度範囲設定手段48として機能する。
【0037】
移動物体検出手段40は監視エリアにおける移動物体の位置を検出する物体検出手段を構成する。移動物体検出手段40はセンサ部20から入力される測距データにおいて、所定以上の距離変化が生じた走査角のまとまり(距離変化群)を移動物体に対応するものとして抽出する。そして、距離変化群における距離及び走査角の分布から把握される移動物体の大きさが人を示す程度である場合に、当該移動物体を人物と判定し、当該人物を検出した方位及び距離を人物の位置とする。人物の位置(方位、距離)は例えば、距離変化群の中心の方位及び距離とする。
【0038】
複数の距離変化群が抽出された場合は、それぞれについて人物判定及び位置の検出を行う。検出した人物にはそれぞれ人物IDを付与する。移動物体検出手段40は前回の走査で検出した人物と今回の走査で検出した人物との大きさの類似度や位置関係を判定する等により、それら人物が同一であるかを判定する。例えば、位置関係に関しては、人物の移動距離と経過時間とから導かれる移動速度の妥当性を同一人物か否かの判定材料とすることができる。
【0039】
なお、人物の方位・距離は距離変化群の走査角・距離の分布範囲や、平均値など他の代表値で表してもよい。
【0040】
タグ解析手段42はリーダ部22と共に、監視エリアにおける無線タグ6の存在及びその位置を検出する手段を構成し、特に、位置を検出する手段に関し、無線タグ6からの電波の受信強度のピークに基づいて当該電波の到来方向を判定し無線タグ6が存在する方位を検出する方位解析手段を構成する。タグ解析手段42は、リーダ部22からタグIDごとに全方位での受信強度をまとめた受信データを入力される。タグ解析手段42は記憶部28の登録タグデータを参照し、検知されたタグIDが登録されたものである場合、方位に応じた受信強度の相違に基づいて、当該タグIDに対応する無線タグ6が存在する方位(タグ方位)を求める処理を行う。タグ解析手段42は基本処理として、受信強度の最大ピークの方向に基づいてタグ方位を求める。例えば、ここでは単純に最大ピークの方向がタグ方位と推定する。
【0041】
なお、ピーク方向に依存したタグ方位の推定方法はこれ以外のものであってもよい。例えば、最新の受信データでの最大ピークの方向と過去に推定されたタグ方位とを重み付け平均して最新のタグ方位としてもよい。これにより、検出誤差などによるタグ方位の変動を平滑化することができる。別の方法として、最大ピーク方向を含む受信強度の山(メインローブ)を抽出し、山の面積(ピーク面積)を2等分する方向、つまり中央値の方向をタグ方位と定めることもできる。また、山が位置する方位範囲の中央、つまり平均値の方向をタグ方位と定めることもできる。
【0042】
また、各方向の受信強度の分布をパターン解析してタグ方位を推定することもできる。例えば、タグリーダの分解能が30°(つまり、0〜360°を12方向に分割)の場合、12方向の受信強度を例えば円形グラフで表し、そのグラフの形状を解析し、より詳細な分解能(例えば5°単位)でタグ方位を決定する。
【0043】
なお、最大ピークの位置の求め方として、受信強度にて当該ピークの概略の位置を求め、次にその両側で強度が0(又は極小)となる点を探索し、そして、最大ピークの両側の点として得られた2つの受信強度の極小点の中点を最大ピークの位置と推定する方法(ヌル走査方式)もある。
【0044】
上述のようにタグ解析手段42は基本処理としては、受信強度の最大ピーク(第1ピーク)の方向に基づいてタグ方位を求めるが、当該第1ピークに基づく電波到来方向が記憶部28に記憶されている反射角度範囲内である場合には、受信強度の2番目に大きなピーク(第2ピーク)に基づく電波到来方向の検出を試行し、その試行結果に応じて無線タグ6の方位を決定する。
【0045】
図3はタグ解析手段42におけるタグ方位の解析処理を説明する概略のフロー図である。また図4は検知装置4が設置される監視エリアに存在する人物の位置及び無線タグ6からの電波の経路の例を示す模式的な平面図である。図5は図4に示す電波経路に対応した受信強度の模式的なグラフであり、縦軸が受信強度、横軸が検知装置4から見た方向を表す角度である。当該角度は検知装置4の正面を90°とし、左横を0°、右横を180°としており、図4に示す検知装置4の左側の壁106が存在する方向が反射角度範囲θabとなっている。
【0046】
タグ解析手段42は、リーダ部22にて登録された無線タグ6が検知された場合、各無線タグ6について図3の方位解析処理を実行する。タグ解析手段42は検知された無線タグ6からの電波の到来方向を受信強度が最大である第1ピークに基づいて検出する(S10)。ステップS10で検出した第1ピークの方位(第1ピーク方向)が反射角度範囲θab外であれば(S12にて「No」及び、図5(a),(b)の場合)、当該方位は無線タグ6からの直接波の到来方向と推定されることから、当該第1ピーク方向をタグ方位と定める(S14)。図5(a)は図4の無線タグ6aの場合に当たり、直接波120aの到来方向に基づいて無線タグ6aの方位が検知される。また図5(b)は図4の無線タグ6bの直接波120bが反射波122より強い場合に当たり、直接波120bの到来方向に基づいて無線タグ6bの方位が検知される。
【0047】
一方、第1ピーク方向が反射角度範囲θab内の場合は(S12にて「Yes」の場合)、反射物体による反射波の可能性があるので、タグ解析手段42は受信強度が第1ピークの次に大きい第2ピークの方位(第2ピーク方向)の検出を試行する(S16)。その結果、図5(c)に示すように、他の方向と比較して受信強度に有意な信号強度差を有する第2ピークが存在し(S18にて「Yes」の場合)、かつ第2ピーク方向が反射角度範囲θab外であれば(S20にて「No」の場合)、第1ピーク方向は反射波であったと推定し、第2ピーク方向をタグ方位と定める(S22)。これは図4の無線タグ6bの場合に当たり、反射波122が直接波120bより強い場合であっても、第2ピークをなす直接波120bの到来方向に基づいて無線タグ6bの方位が検知される。
【0048】
第2ピーク方向の検出を試みた結果、第2ピークが存在しない場合(S18にて「No」の場合)や、第2ピーク方向が反射角度範囲θab内である場合(S20にて「Yes」の場合)は、第1ピーク方向は反射波ではなく直接波であると判断し、第1ピーク方向をタグ方位とする(S14)。これは図5(d)及び図4の無線タグ6cの場合に相当し、直接波120cの到来方向に基づいて壁106の手前に位置する無線タグ6cの方位が検知される。
【0049】
リンク処理手段44は、移動物体検出手段40により検出された人物の位置情報と、タグ解析手段42により検出された無線タグ6の位置情報とを照合して移動物体に対応する無線タグ6を求める対応付け手段として機能する。本実施形態では、リンク処理手段44は無線タグ6が検知されている場合、人物の位置を特定する情報に含まれる方位(人物の方位)と無線タグ6の方位とを比較し、その一致性が認められれば、人物と無線タグ6とを対応付ける(リンク成立)。一方、一致性が認められない場合や、無線タグ6が検知されていない場合は対応付けしない(リンク失敗)。
【0050】
図6はリンク処理手段44における処理を説明する概略のフロー図である。移動物体検出手段40は人物の位置を特定し(S50)、当該人物が追跡中の人物でない、つまり今回のセンサ部20の走査で新たに検出された人物である場合には(S52にて「No」の場合)、当該人物に人物IDを付与し(S54)リンク設定を試みる(S58〜S68)。一方、追跡中の人物である、つまり人物IDを既に付与されている人物である場合には(S52にて「Yes」の場合)、リンク処理手段44が当該人物IDについてリンクが存在するか否か、つまり無線タグ6と対応付けされているか否かを判定する(S56)。追跡中であるがリンクが存在しない場合は(S56にて「No」の場合)リンク設定を試みる(S58〜S68)。
【0051】
リンクが存在しない場合(S52及びS56にて「No」の場合)は、リンク処理手段44はタグ解析手段42により無線タグ6が検出されており(S58にて「Yes」の場合)、かつ当該無線タグ6のタグIDに対してリンクが設定されていない場合(S60にて「Yes」の場合)、人物の方位と無線タグ6の方位との相違量(方位ズレ量)を算出する(S62)。そして、方位ズレ量が所定の閾値Th1以内であれば(S64にて「Yes」の場合)、リンク処理の対象としている人物に付与されている人物IDに当該無線タグ6のタグIDを対応付け、これにより新たなリンクが設定される(S66)。
【0052】
一方、監視エリアに無線タグ6が検知されていない場合(S58にて「No」の場合)や無線タグ6は検知されているが未リンクのものはない場合(S60にて「No」の場合)、また方位ズレ量が閾値Th1を超えている場合は(S64にて「No」の場合)リンクを設定することができないか、設定することが不適切である場合である。よって、これらの場合はリンク失敗の場合として、リンク処理手段44は処理対象の人物に対してリンクを設定しない(S68)。
【0053】
リンク処理手段44は処理対象の人物に前回の処理にてリンクが設定されている場合(S56にて「Yes」の場合)、リンク維持判定処理S70を行う。リンク維持判定処理S70は、無線タグ6の検出誤差が比較的大きいことに配慮した処理であり、一旦リンクを設定した人物と無線タグ6に対しては以降のリンク処理において一致判定の基準を緩和してリンク切れが頻繁に発生する事態を回避する。
【0054】
図7はリンク維持判定処理S70の一例の概略のフロー図であり、リンク処理手段44はリンクが存在する場合には、リンクが存在しない場合の処理S58〜S68に代えて、リンク維持判定処理S70を実行する。具体的には、リンク処理手段44はリンク維持の判定対象の無線タグ6のタグIDがタグ解析手段42により検出されており(S80及びS82にて「Yes」の場合)、リンク維持の判定対象の人物及び無線タグ6についての方位ズレ量を算出する(S84)。そして、方位ズレ量がTh2>Th1に設定される閾値Th2以内であれば(S86にて「Yes」の場合)、リンク維持の判定対象の人物と無線タグ6との間にリンクが成立すると判定し、両者の対応付けを維持する(S88)。一方、監視エリアに無線タグ6が検知されていない場合(S80にて「No」の場合)や無線タグ6は検知されているがリンク維持判定の対象のタグIDは検知されていない場合(S82にて「No」の場合)、また方位ズレ量が閾値Th2を超えている場合は(S86にて「No」の場合)はリンク失敗とすべき状態であり、維持するかの判定対象としている対応付けを解除する(S90)。例えば閾値Th1は5゜とし、Th2は8゜に設定することができる。
【0055】
リンク処理手段44は上述のリンク処理を監視エリアにて検出された人物ごとに行う。
【0056】
なお、上述した無線タグ6の二次元座標を求める構成では、方位の一致性に代えて二次元座標の一致性に基づいてリンク処理を行う。すなわち、方位及び距離で与えられる人物の位置と無線タグ6の二次元座標で表される位置との距離をズレ量として判定処理S64,S86を行う。
【0057】
異常判定手段46は、監視エリアにおいて検出された人物が無線タグ6と対応付けされているか否かに基づき当該人物がユーザであるか否かを識別し、侵入異常の判定を行う。具体的には、異常判定手段46は移動物体検出手段40にて検出された人物の位置の変化を追跡すると共に、当該人物についてのリンク処理手段44による無線タグ6との対応付け結果を取得する。そして、無線タグ6と対応付けされていない人物(不審者候補)が監視エリア内に所定時間継続して存在する場合、当該人物を敷地内での不正滞留者とみなし、外周侵入異常と判定する。また、監視エリアから監視対象の建物側に移動した不審者候補を検出した場合、当該人物を建物への不正侵入者とみなし、建物侵入異常と判定する。異常判定手段46は、外周侵入異常又は建物侵入異常を判定すると、報知部30により異常発生を周囲に報知すると共に、通信部32を介して遠隔の警備センタへ異常発生を通報する。
【0058】
反射角度範囲設定手段48は、センサ部20によるレーザ走査の走査角度及び距離測定値からなる測距データに基づき監視エリアに存在する反射物体の物体面を検出し、当該物体面が存在する方位を包含する角度範囲を反射角度範囲θabとして記憶部28に記憶させる。
【0059】
反射角度範囲設定手段48は所定周期又は所定タイミングで反射物体の物体面の検出処理を実行して反射角度範囲θabを更新する。例えば、反射角度範囲設定手段48は初期設定の際、及び監視動作中の一定時間ごと(例えば10秒ごと)に反射角度範囲θabの解析・更新処理を実行する。
【0060】
図8は反射角度範囲設定手段48における反射角度範囲θabの登録・更新処理の概略のフロー図である。反射角度範囲設定手段48は測距データから走査角ごとの距離値r(θ)を取得する(S100)。ここでr(θ)は最新の測距データの値を用いる構成とすることもできるし、数周期分の平均値を用いる構成とすることもできる。また、反射物体として登録すべき物体は基本的に、監視対象とする移動物体である人物に対して背景として存在する静止物体である。よって、一定期間、距離値が安定している走査角のみを後述の物体面の検出処理の対象としてもよい。
【0061】
反射角度範囲設定手段48は走査角ごとの距離値r(θ)に基づいて同一物体面の検出処理を行う(S102)。例えば、走査角が隣接する所定数の距離値r(θ)を抽出し、それらが表す監視エリア内での座標群(点群)について回帰直線を推定する。当該回帰直線について最小二乗法による二乗誤差が閾値未満か否かを判定し、閾値未満であれば、抽出した座標群は回帰直線に沿った平面を構成すると判断し、閾値以上であれば平面を構成しないと判断する。ここでは、検知装置4を原点とし、検知装置4の設置面(図2の例では壁104)に平行にy軸を設定し、検知装置4の正面方向(設置面と直交する視軸方向)をx軸に設定し、回帰直線を“y=ax+b”と表す。
【0062】
1回に抽出する距離値の個数は例えば、座標群のうち走査角θが最小のものが表す座標と最大のものが表す座標との距離が1m相当になるように調整され、これにより反射物体の表面の一部をなす1mに応じた長さの平面が同一物体面として検出される。反射角度範囲設定手段48は座標群を順次ずらして上記処理を繰り返し、これにより監視エリア内の反射物体の表面を構成する同一物体面の集合が得られる。なお、順次抽出する座標群のθの範囲は互いに一部をオーバーラップさせることができ、例えば、1m相当の座標群を抽出する場合に0.5mずつずらして順次、座標群を抽出することができる。
【0063】
なお、隣接する走査角にて距離値r(θ)の差が所定値以下である測定点の連鎖を探索し、当該連鎖の長さが所定値(例えば1m)以上であればその連鎖を形成する座標群を処理結果の同一物体面として抽出してもよい。
【0064】
次に反射角度範囲設定手段48は、抽出した各物体面が検知装置4の設置面に略直交し(S104)、且つ検知装置4の近傍に位置する物体のものであるか(S106)を調べ、当該条件を満たす場合(S104及びS106にて「Yes」の場合)は当該物体面が検知装置4でのタグ方位検知に影響を与える反射物体に該当するとして反射角度範囲θabを求める(S108)。
【0065】
物体面が検知装置4の設置面に略直交しているか否かの判定処理S104は例えば、回帰直線の傾きaの絶対値に基づいて行うことができ、傾きaが予め設定した閾値未満であれば略直交であると判断する。
【0066】
処理対象の物体面が検知装置4の近傍に存在するか否かの判定処理S106は例えば、当該物体面のうち検知装置4から最も遠い測距点の距離値r(θ)に基づいて行うことができ、距離値r(θ)が所定距離R以内であれば、その物体面(1m相当)は近傍であると判断する。例えばRは3m程度に設定することができる。
【0067】
なお、処理S106では設置面に略直交している物体面を処理対象としているので、基本的に物体面をなす測距点のうち走査角θが最も90°(x軸方向)に近い点が最も遠い測距点となる。よって、測距点のうちそのθと90°との差の絶対値が最小となる点の距離値r(θ)をRと比較して近傍判定を行っても良い。
【0068】
また、検知装置4から物体面に沿う回帰直線(y=ax+b)への垂線の長さや、当該回帰直線のy切片bや、或いは最も90°側の測距点の距離値と走査角とから定まる距離y(r,θ)が所定値以下であることに基づいて近傍判定を行う構成とすることもできる。
【0069】
また、処理S100やS102にて予め処理対象の距離値r(θ)を所定距離R以下に制限して物体面の検出処理を行うこととし、近傍判定処理S106を省略することもできる。
【0070】
反射角度範囲設定手段48は、判定処理S104及びS106の条件を満たす物体面について反射角度範囲θabを求める(S108)。具体的には、当該物体面の両端の走査角度をθa,θbとし角度範囲θa〜θbを当該物体面の反射角度範囲θabとする(S108)。なお、上記条件を満たさない物体面(S104又はS106にて「No」の場合)については反射角度範囲θabは定めない。
【0071】
反射角度範囲設定手段48は処理S102で検出した物体面のうち未処理の物体面があれば(S110にて「Yes」)、当該物体面について処理S104〜S108を行い、全ての物体面について当該処理が終了すると(S110にて「No」)、処理S108にて求められた反射角度範囲θabを記憶部28に登録、更新する処理を行う(S112)。その際、複数の反射角度範囲θabが連続する場合には、それらを統合して1つの反射角度範囲θabとし、これを記憶部28に記憶させることができる。
【0072】
なお、上述した物体面の検出処理S102をθ=90°から0°に向かう方向、及びθ=90°から180°に向かう方向にそれぞれ行い、それら各方向にて1つの物体面が検出された時点で当該物体面について処理S104〜S108を行ってもよい。この場合、反射物体とみなせる、すなわち設置面に略直交し且つ検知装置4の近傍に存在する物体面が検出された時点で反射物体の探索を終了し、当該物体面の方位を含む角度範囲を、反射角度範囲θabとして登録することができる。具体的には、検出された物体面の遠方側(90°寄り)の端部の角度θb又はθaを用いて0°〜θb又はθa〜180°を反射角度範囲θabと定義する。この定義では、反射角度範囲θab内には実際には反射物体が存在しない設置面側の方位も含まれ得るが、基本的には第2ピーク検出処理等が余分に行われるだけであって、高精度でのタグ方位の検出には影響しない。
【0073】
上述した処理では、反射物体の物体面は設置面に略直交するという条件を課したが、検知装置4の近傍の物体という条件だけとしてもよい。また、設置面に略直交との条件に代えて、検知装置4に対向しない物体面、又は検知装置4の側方に位置する物体面との条件としてもよい。
【0074】
以上のように、検知装置4はタグ解析手段42により、反射物体からの反射波の影響を考慮してタグ方位を検出するので、検出精度の向上が図られる。また、無線タグ6の方位解析に影響がある壁などの反射物体の位置(角度範囲)を自動検出し、これによりタグ方位検出の精度が確保される。さらに反射物体の位置を初期設定時に登録するだけでなく監視動作中も随時更新するので、監視エリアの状況が変化してもタグ方位検出の精度が維持される。例えば、駐車している自動車の移動などの状況の変化が生じてもタグ方位を高精度に検出可能である。
【0075】
検知装置4はLAN(Local Area Network)やその他の通信網で監視装置又は警備センタと接続される構成としており、検知装置4に設けられる通信部32は監視装置や警備センタとの通信インターフェースである。
【0076】
また、報知部30は異常検知時の警報を出力するスピーカ等である。例えば、異常判定手段46が報知部30を動作させる。また、通信部32を介して検知処理部26が警備センタや監視装置から指示を受けて報知部30を動作させる構成とすることもできる。
【0077】
上述の実施形態では、無線タグ6はリーダ部22からの質問信号を受けて応答信号を発するものとしたが、無線タグ6は一定周期或いは振動検知時に自発的に発信するものとしてもよい。
【0078】
以上、実施形態により説明した本発明では、監視エリアにて検出した人物と無線タグ6との位置を照合して当該人物と無線タグ6とを対応付けする。これにより、監視エリア内のどの人物がどの無線タグ6を所持しているかが的確に把握される。さらに本発明では、無線タグ6が発する電波の反射物体での反射の影響を考慮して、無線タグ6の方位を決定するので、人物と無線タグ6との対応付けの精度が向上する。
【符号の説明】
【0079】
2 不審者監視システム、4 検知装置、6 無線タグ、20 センサ部、22 リーダ部、24 カメラ、26 検知処理部、28 記憶部、30 報知部、32 通信部、40 移動物体検出手段、42 タグ解析手段、44 リンク処理手段、46 異常判定手段、48 反射角度範囲設定手段。
【特許請求の範囲】
【請求項1】
可搬型の無線機が発する電波を受信して当該無線機が存在する方位を検出する方位検出装置であって、
前記電波の反射物体が存在する方位を示す反射角度範囲を記憶する記憶手段と、
前記電波の受信強度のピークに基づいて当該電波の到来方向を判定し前記無線機の方位を検出する方位解析手段と、を有し、
前記方位解析手段は、前記受信強度の第1ピークに基づく前記到来方向が前記反射角度範囲内である場合には、前記受信強度の第2ピークに基づく前記到来方向の検出を試行し、その試行結果に応じて前記無線機の方位を決定すること、を特徴とする無線機の方位検出装置。
【請求項2】
前記方位解析手段は、前記反射角度範囲外にて前記第2ピークに基づく前記到来方向が検出された場合には、当該到来方向を前記無線機の方位とすること、を特徴とする請求項1に記載の無線機の方位検出装置。
【請求項3】
前記記憶手段は、当該装置の所定の近傍範囲内に存在する前記反射物体についての前記反射角度範囲を記憶すること、を特徴とする請求項1又は請求項2に記載の無線機の方位検出装置。
【請求項4】
前記記憶手段は、当該装置の所定の近傍範囲内に存在し且つ当該装置の設置壁面に略直交する物体面を持つ前記反射物体についての前記反射角度範囲を記憶すること、を特徴とする請求項1又は請求項2に記載の無線機の方位検出装置。
【請求項5】
さらに、監視空間を水平面内の所定の角度ごとにレーザ走査して物体までの距離を測定する測距手段と、
前記レーザ走査の走査角度及び前記距離からなる測距データに基づき前記物体面を検出し、当該物体面が存在する方位を包含する角度範囲を前記反射角度範囲として前記記憶部に記憶させる反射角度範囲設定手段と、
を備えたことを特徴とする請求項3又は請求項4に記載の無線機の方位検出装置。
【請求項6】
前記反射角度範囲設定手段は、所定周期又は所定タイミングで前記反射物体の前記物体面の検出処理を実行して前記反射角度範囲を更新すること、を特徴とする請求項5に記載の無線機の方位検出装置。
【請求項7】
さらに、前記測距データに基づき、移動物体の存在及びその方位を検出する移動物体検出手段と、
前記移動物体の検出方位と前記無線機の検出方位との一致性により当該移動物体と当該無線機との対応付けを行う対応付け手段と、
前記無線機との対応付けがされない前記移動物体の存在に基づいて不審物体の存在を判定する異常判定手段と、
を備えたことを特徴とする請求項5又は請求項6に記載の無線機の方位検出装置。
【請求項1】
可搬型の無線機が発する電波を受信して当該無線機が存在する方位を検出する方位検出装置であって、
前記電波の反射物体が存在する方位を示す反射角度範囲を記憶する記憶手段と、
前記電波の受信強度のピークに基づいて当該電波の到来方向を判定し前記無線機の方位を検出する方位解析手段と、を有し、
前記方位解析手段は、前記受信強度の第1ピークに基づく前記到来方向が前記反射角度範囲内である場合には、前記受信強度の第2ピークに基づく前記到来方向の検出を試行し、その試行結果に応じて前記無線機の方位を決定すること、を特徴とする無線機の方位検出装置。
【請求項2】
前記方位解析手段は、前記反射角度範囲外にて前記第2ピークに基づく前記到来方向が検出された場合には、当該到来方向を前記無線機の方位とすること、を特徴とする請求項1に記載の無線機の方位検出装置。
【請求項3】
前記記憶手段は、当該装置の所定の近傍範囲内に存在する前記反射物体についての前記反射角度範囲を記憶すること、を特徴とする請求項1又は請求項2に記載の無線機の方位検出装置。
【請求項4】
前記記憶手段は、当該装置の所定の近傍範囲内に存在し且つ当該装置の設置壁面に略直交する物体面を持つ前記反射物体についての前記反射角度範囲を記憶すること、を特徴とする請求項1又は請求項2に記載の無線機の方位検出装置。
【請求項5】
さらに、監視空間を水平面内の所定の角度ごとにレーザ走査して物体までの距離を測定する測距手段と、
前記レーザ走査の走査角度及び前記距離からなる測距データに基づき前記物体面を検出し、当該物体面が存在する方位を包含する角度範囲を前記反射角度範囲として前記記憶部に記憶させる反射角度範囲設定手段と、
を備えたことを特徴とする請求項3又は請求項4に記載の無線機の方位検出装置。
【請求項6】
前記反射角度範囲設定手段は、所定周期又は所定タイミングで前記反射物体の前記物体面の検出処理を実行して前記反射角度範囲を更新すること、を特徴とする請求項5に記載の無線機の方位検出装置。
【請求項7】
さらに、前記測距データに基づき、移動物体の存在及びその方位を検出する移動物体検出手段と、
前記移動物体の検出方位と前記無線機の検出方位との一致性により当該移動物体と当該無線機との対応付けを行う対応付け手段と、
前記無線機との対応付けがされない前記移動物体の存在に基づいて不審物体の存在を判定する異常判定手段と、
を備えたことを特徴とする請求項5又は請求項6に記載の無線機の方位検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−113740(P2013−113740A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−260814(P2011−260814)
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000108085)セコム株式会社 (596)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月29日(2011.11.29)
【出願人】(000108085)セコム株式会社 (596)
【Fターム(参考)】
[ Back to top ]