
無線測位装置及び方法並びにこれを用いる移動端末機
【課題】リソースの制限された移動端末機環境において位置測定の正確性及び迅速性を考慮すると同時に、エネルギーの効率及び使用者の利便性を改善する。
【解決手段】無線測位装置は、特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS測位モードを含む測位モードのうち、特定状況に対応する測位モードを判断する測位モード判断部と、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、を備える。
【解決手段】無線測位装置は、特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS測位モードを含む測位モードのうち、特定状況に対応する測位モードを判断する測位モード判断部と、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線測位技術に関し、特に、リソースの制限された移動端末機環境において適応的な測位方式を適用することによって、位置測定の正確性及び迅速性を考慮するとともに、エネルギーの効率を改善することができる無線測位装置及び方法並びにこれを用いる移動端末機に関するものである。
【背景技術】
【0002】
近年、携帯電話やPDAのような移動通信端末機の普及率が急増するに伴い、移動通信端末機を用いる様々な無線インターネットサービスが紹介されている。特に、位置ベースサービス(LBS:Location Based Service)は、広範囲な活用性及び利便性から大きく脚光を浴びている。例えば、位置ベースサービスは、救助要請や犯罪申告に適切に対応する必要がある場合、多数の地域の地理的情報や交通情報が必要な場合、位置によって移動通信料金を差別化する場合、物流管制を行う場合を含め、様々な分野及び状況に適用可能である。このような位置ベースサービスを実現するためには、移動通信端末機の位置を把握する技術である無線測位技術(PDT:Position Determination Technology)が必須である。
【0003】
かかる無線測位技術には、移動通信ネットワークの基地局受信信号を用いるネットワークベース(Network Based)方式、端末機に装着されるGPS(Global Positioning System)信号受信機などを用いる端末機ベース(Handset Based)方式、及びこれら両方式を混合して使用するハイブリッド(Hybrid)方式がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ネットワークベース方式は、移動通信基地局のセル(Cell)の大きさや位置決定方式によって、500mから数kmに至る位置誤差が生じるため、正確度が落ちるという問題があった。また、端末機ベース方式及びハイブリッド方式は、GPS信号を用いるため、悪天候の場合又は室内や地下に位置する場合のように無線通信環境が劣悪な場合には適用しにくいという問題があった。さらに、これらの方式はリソースの制限された移動端末機環境においてエネルギー効率を全く考慮していないという問題もあった。
【0005】
本発明の実施例は、リソースの制限された移動端末機環境において、適応的な測位方式を適用することによって、位置測定の正確性及び迅速性を考慮すると同時にエネルギーの効率を改善する。
【0006】
また、本発明の実施例は、様々な無線通信環境において位置測定を可能にすることによって、使用者の利便性を改善する。
【0007】
また、本発明の属する技術の分野における通常の知識を有する者には、本発明の実施例が、以上に言及していない他の技術的課題を解決できるということが、下記の記載から明確に理解できるであろう。
【課題を解決するための手段】
【0008】
本発明の一実施例に係る無線測位装置は、特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断部と、判断された測位モードが、前記Stand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、を含む。
【0009】
一実施例において、前記測位モード判断部は、予め定められた周期的測位状況が発生すると、前記周期的測位状況に対応する測位モードを前記Stand−Alone GPS測位モードと判断する。
【0010】
一実施例において、前記測位モード判断部は、予め定められた実時間測位状況が発生すると、前記実時間測位状況に対応する測位モードを前記AGPS測位モードと判断する。
【0011】
一実施例において、前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、前記位置情報生成部は、前記受信された前記GPS信号を用いて前記周期毎に前記Stand−Alone GPS測位を行う。
【0012】
一実施例において、前記無線測位装置は、位置決定サーバー(PDE:Position Determination Entity)を有する移動通信システムと通信を行う無線通信部をさらに含み、前記位置情報生成部は、前記無線通信部を介して受信される前記位置決定サーバーのデータを用いて実時間で前記AGPS測位を行う。
【0013】
本発明の他の一実施例に係る無線測位装置は、特定状況が発生する場合に、Cell ID測位モード、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断部と、判断された測位モードが前記Cell ID測位モードであると、予め定められた第1周期毎に又は実時間でCell ID測位を行って位置情報を生成し、判断された測位モードが前記Stand−Alone GPS測位モードであると、予め定められた第2周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、を含む。
【0014】
一実施例において、前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、前記測位モード判断部は、前記GPS信号受信部によるGPS信号受信に失敗した状況が発生すると、前記失敗状況に対応する測位モードを前記Cell ID測位モードと判断する。
【0015】
一実施例において、前記無線測位装置は、移動局位置決定センター(MPC:Mobile Positioning Center)を有する移動通信システムと通信を行う無線通信部をさらに含み、前記測位モード判断部は、前記Cell ID測位モード状態で予め定められた周期的測位状況が発生すると、前記Cell ID測位モードを周期的Cell ID測位モードと判断し、前記位置情報生成部は、前記無線通信部を介して受信される前記移動局位置決定センターのデータを用いて前記第1周期毎にCell ID測位を行う。
【0016】
一実施例において、前記測位モード判断部は、前記Cell ID測位モード状態で予め定められた実時間測位状況が発生すると、前記Cell ID測位モードを実時間Cell ID測位モードと判断し、前記位置情報生成部は、前記無線通信部を介して受信される前記移動局位置決定センターのデータを用いて実時間でCell ID測位を行う。
【0017】
本発明の一実施例に係る移動端末機は、GPS衛星から受信するGPS信号及び移動通信システムの位置決定サーバー(PDE)から受信するデータを用いて、予め定められた周期的測位状況が発生する場合に、予め定められた周期毎にStand−Alone GPS測位を行い、予め定められた実時間測位状況が発生する場合に、実時間でAGPS測位を行う無線測位装置と、前記無線測位装置の測位により生成される位置情報を表示する表示部と、を含む。
【0018】
本発明の一実施例に係る無線測位方法は、GPS信号受信部及び無線通信部を含む無線測位装置を通じて無線測位を行う方法であり、特定状況が発生する場合に、無線測位装置でCell ID測位モード、Stand−Alone GPS測位モード及びAGPS測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断段階と、前記無線測位装置で前記判断された測位モードが前記Cell ID測位モードであると、予め定められた第1周期毎に又は実時間でCell ID測位を行って位置情報を生成し、前記判断された測位モードが前記Stand−Alone GPS測位モードであると、予め定められた第2周期毎にStand−Alone GPS測位を行って位置情報を生成し、そして前記判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成段階と、を含む。
【発明の効果】
【0019】
上記のように、本発明の実施例は、リソースの制限された移動端末機環境において、状況の変化に応じて適応的に測位方式を選択して行わせることにより、位置測定の正確性及び迅速性を考慮しながらもエネルギーの効率を改善することができる。
また、本発明の実施例は、GPS信号の受信が不可能な環境でも位置測定を可能にしたため、使用者の利便性をさらに改善することが可能になる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施例が適用され得る移動通信システムの環境を示す図である。
【図2】本発明の一実施例に係る無線測位装置を示すブロック図である。
【図3】本発明の一実施例に係る無線測位方法を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明の技術的課題に関する解決方案を明確化するために、添付図面を参照して本発明の好適な実施例について詳細に説明する。ただし、下記の説明において、関連する公知技術に関する説明が本発明の要旨をかえって不明瞭にすると判断される場合は、その詳細な説明を省略する。また、後述する用語は、本発明での機能を考慮して定義された用語であり、これは、使用者、運用者などの意図又は慣例などによって変更されてもよい。したがって、その定義は、本明細書の全般にわたる内容に基づいて行わなければならない。
【0022】
図1には、本発明の実施例が適用され得る移動通信のネットワーク環境を示す。
【0023】
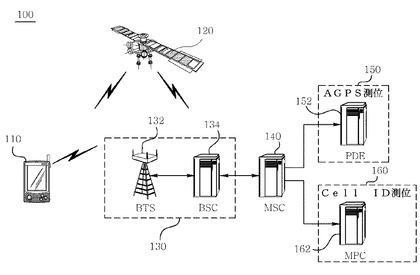
図1に示すように、移動通信のネットワーク環境100は、移動端末機110、GPS衛星120、基地局130、移動交換局(MSC:Mobile Switching Center)140、及びネットワークベース測位システム150,160を含むことができる。
【0024】
移動端末機110は、無線測位装置及び表示部を含み、無線測位を行うことができる。例えば、無線測位装置は、GPS衛星120から受信するGPS信号、及び移動通信システムの位置決定サーバー(PDE:Position Determination Entity)152から受信するデータを用いて、予め定められた周期的測位状況が発生すると、予め定められた周期毎にStand−Alone GPS測位を行い、予め定められた実時間測位状況が発生すると、実時間でAGPS(Assisted GPS)測位を行う。そして、表示部は、無線測位装置の測位により生成される位置情報を、使用者が認識できるように表示する。
【0025】
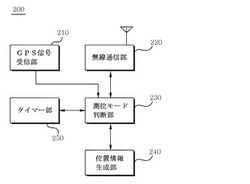
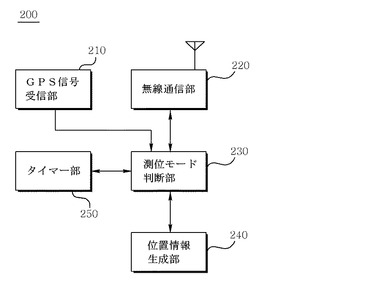
一実施例において、無線測位装置は、測位モード判断部及び位置情報生成部を含むことができる。測位モード判断部は、特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS測位モードを含む測位モードのうち、当該特定状況に対応する測位モードを判断する。そして、位置情報生成部は、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する。この場合、測位モード判断部は、周期的測位状況が発生すると、当該周期的測位状況に対応する測位モードをStand−Alone GPS測位モードと判断し、実時間測位状況が発生すると、当該実時間測位状況に対応する測位モードをAGPS測位モードと判断することができる。
【0026】
一方、GPS衛星120は、GPS(Global Positioning System)で移動端末機110の位置を把握するのに用いられる衛星である。GPS衛星120は、位置計算のために必要な航法データを搬送波(Carrier Wave)を用いて移動端末機110に連続して伝送する24基の衛星から構成され、これらのうち、21基の衛星は航法に用いられ、3基の衛星は予備用として配置されるとよい。
【0027】
基地局130の基地局伝送器(BTS:Base Transceiver Station)132は、無線送受信機から構成された装備で、無線アクセスネットワーク(Radio Access Network:RAN)内の移動端末機110と無線リンクを通じて音声通話及びパケットデータを送/受信する。そして、基地局130の基地局制御器(BSC:Base Station Controller)134は、多数の基地局伝送器132を管理し、無線チャンネル設定(Setup)、周波数ホッピング(Frequency Hopping)、ハンドオーバー(Handover)処理などを担当する。
【0028】
移動交換局(MSC:Mobile Switching Center)140は、移動端末機110の移動性管理、位置登録/管理、認証、ハンドオーバー、ローミングなどを担当する。
【0029】
移動通信システムに含まれるネットワークベース測位システム150,160の位置決定サーバー(PDE:Position Determination Entity)152は、移動端末機110の伝送したGPS情報から緯度/経度情報などを計算する。
【0030】
ネットワークベース測位システム150,160の移動局位置決定センター(MPC:Mobile Positioning Center)162は、移動端末機110に対するGPS測位に失敗する場合に、移動交換局140を介してCell−ID方式の測位を処理し、移動端末機110に関する基地局Cell情報を移動端末機110などに伝送する。
【0031】
以下、図2及び図3を参照して本発明の実施例についてより具体的に説明する。
【0032】
図2は、本発明の一実施例に係る無線測位装置を示すブロック図である。また、図3は、本発明の一実施例に係る無線測位方法を示すフローチャートである。
【0033】
図2及び図3に示すように、無線測位装置100は、測位モード判断部230及び位置情報生成部240を含む。
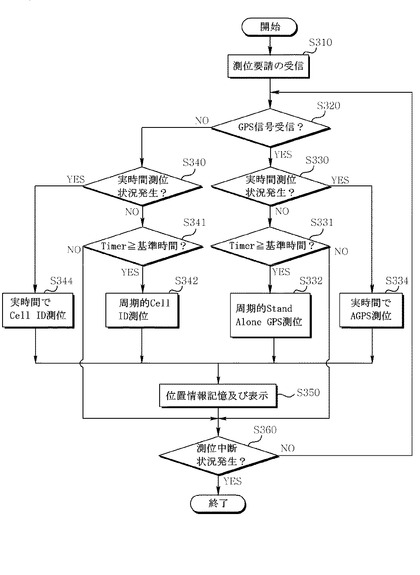
まず、無線測位装置100の適用される移動端末機のセッティングや、使用者のキー入力又はメニュー選択により無線測位装置100に測位要求が受信されると、無線測位装置100は測位を開始する(S310)。
【0034】
そして、測位モード判断部230は、特定状況が発生すると、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、当該特定状況に対応する測位モードを判断する(S320、S330、S340)。
【0035】
次に、位置情報生成部240は、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する(S331、S332、S334)。この場合、位置情報生成部240が行うAGPS測位は、移動局補助GPS(MS Assisted GPS )測位又は移動局ベースGPS(MS Based GPS)測位でよい。
【0036】
Stand−Alone GPS測位方式は、米国国防省が管理し、20,000Km上空の地球軌道を回る24基のGPS人工衛星のうちの3基から1.5GHzの周波数帯域、2400乃至4800bpsの低い伝送速度による衛星軌道情報を受信して、三角測量法で緯度、経度、海抜の位置情報を把握し、もう一つの衛星信号を更に受信及び分析して時間情報を把握する方式である。Stand−Alone GPS測位方式は、誤差範囲が数m乃至数十m程度と比較的精密であるという利点があるが、低い伝送速度の信号を受信及び復調して応用するまでの実際の所要時間であるTTFF(TIME TO FIRST FIX)が約1分以上から数十分もかかるなど、測位に時間がかかるという欠点がある。
【0037】
そのため、測位モード判断部230は、予め定められた周期的測位状況が発生する場合、例えば、無線測位装置100の適用された移動端末機がブートを始めて移動通信ネットワーク上に存在したり通話待機状態にあるなどのように正常状況が発生する場合、その外に特別なイベントがない場合などには、周期的測位状況に対応する測位モードをStand−Alone GPS測位モードと判断する(S330)。続いて、位置情報生成部240は、GPS衛星から受信されたGPS信号を用いてStand−Alone GPS測位を行う(S331、S332)。この場合、位置情報生成部240は、エネルギー効率のために、予め定められた周期毎にStand−Alone GPS測位を行う。このために、無線測位装置100は、GPS衛星からGPS信号を受信するGPS信号受信部210を含むことができる。また、予め定められた周期をカウントするタイマー部250をさらに含むことができる。尚、測位を行う周期は、無線測位装置100の適用される環境を考慮して決定するとよい。例えば、520mAh容量のバッテリを使用する小型移動端末機環境においてコール(Call)を試みる際、520mAhが消耗され、測位時間が30秒程度かかるとすれば、待機時間を24時間以上保持するために、測位周期は12分程度とすることができる。
【0038】
また、AGPS測位方式は、移動通信システムベース端末機補助GPS(MS−Assisted Network−Based GPS)、すなわち、MS Assisted GPS方式と、移動通信システム補助端末機ベースGPS(MS−Based Network−Assisted GPS)、すなわち、MS Based GPS方式とに区別できる。MS Assisted GPS方式とMS Based GPS方式は、移動端末機(MS)の位置情報を計算又は演算するために、移動通信システムの位置決定サーバー(PDE)から伝送される補助(Aiding)データを受信し、一つ以上のGPS衛星から受信されたGPS信号を分析して位置情報を演算する方式である。
【0039】
特に、MS Assisted GPS方式は、移動端末機が受信したGPS情報を移動通信システムに伝送し、該移動通信システムの位置決定サーバー(PDE)でGPS情報と既存に知っているGPS衛星の散布などの情報に対する検索結果の値に基づいて最終位置の値を計算し、それを移動端末機に伝送する方式である。
【0040】
また、MS−Based GPS方式は、移動端末機が移動通信システムの位置決定サーバー(PDE)からGPS衛星の補助(Aiding)データの値を受信し、該受信した補助データに基づき、非常に短いTTFFの間に、指定されたGPS人工衛星からGPS信号を受信及び自体演算することで、現在位置の経度、緯度、海抜などに関する位置情報を生成する方式である。この場合、補助データは、GPS衛星を用いる位置確認方式において先行的に確保すべき必須情報であり、GPS衛星の軌道情報を表示するアルマナック(ALMANAC)情報及びGPS衛星の飛行速度又は移動速度の情報を表示するエフェメリス(EPHEMERIS)情報を表す。
【0041】
したがって、測位モード判断部230は、予め定められた実時間測位状況が発生する場合、例えば、無線測位装置100の適用された移動端末機がバッテリ切れ寸前だったり、他の移動端末機への緊急通話要請に失敗するなどのように緊急状態が発生する場合、使用者による実時間位置照会要請がある場合、その他の特別なイベントが発生する場合などには、実時間測位状況に対応する測位モードをAGPS測位モードと判断する(S330)。すると、位置情報生成部240は、GPS衛星から受信されたGPS信号及び移動通信システムに位置する位置決定サーバー(PDE:Position Determination Entity)のデータを用いてAGPS測位を行う(S334)。この場合、位置情報生成部240は、迅速かつ正確な位置情報を提供するために実時間でAGPS測位を行う。このために、無線測位装100は、位置決定サーバー(PDE)を有する移動通信システムと通信を行う無線通信部220をさらに含むことができる。又、前述したように、位置情報生成部240は、実施例に応じて移動局補助GPS(MS Assisted GPS)測位を行ったり、移動局ベースGPS(MS Based GPS)測位を行ったりして、位置情報を生成することができる。
【0042】
一方、Stand−Alone GPS測位方式及びAGPS測位方式は、GPS信号を必須に要求する方式である。その結果、GPS衛星の数が足りない場合、悪天候な場合、又は室内や地下に位置する場合のように無線通信環境が劣悪な場合には、無線測位装置の正常的な動作が不可能になる。
【0043】
したがって、一実施例において、測位モード判断部230は、特定状況が発生する場合に、Cell ID測位モード、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、当該特定状況に対応する測位モードを判断することができる(S320、S330、S340)。
【0044】
次に、位置情報生成部240は、判断された測位モードがCell ID測位モードであると、予め定められた第1周期毎に或いは実時間でCell ID測位を行って位置情報を生成し、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた第2周期毎にStand−Alone GPS測位を行って位置情報を生成し、そして判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成すればよい(S331、S332、S334、S341、S342、S344)。
【0045】
一実施例において、測位モード判断部230は、GPS信号受信部210によるGPS信号の受信に失敗する状況が発生する場合に、この失敗状況に対応する測位モードをCell ID測位モードと判断する(S320)。
【0046】
また、測位モード判断部230は、Cell ID測位モード状態で予め定められた周期的測位状況が発生する場合、例えばGPS信号の受信に失敗したが他に特別なイベントがない場合などには、Cell ID測位モードを周期的Cell ID測位モードと判断する(S340)。そして、位置情報生成部240は、無線通信部220を介して受信される移動局位置決定センター(MPC:Mobile Positioning Center)のデータを用いて、第1周期毎にCell ID測位を行う(S341、S342)。この場合、位置情報生成部240は、タイマー部250を用いて第1周期をカウントできる。尚、無線測位装置100は、移動局位置決定センター(MPC)を有する移動通信システムと通信を行う別の無線通信部を含んでもよい。
【0047】
さらに、測位モード判断部230は、Cell ID測位モード状態で予め定められた実時間測位状況が発生する場合、例えばGPS信号の受信に失敗した状態で、無線測位装置100の適用された移動端末機がバッテリ切れ寸前だったり他の移動端末機への緊急通話要請に失敗するなどのように緊急状態が発生する場合、使用者による実時間位置照会要請がある場合、その他の特別なイベントが発生する場合などには、Cell ID測位モードを実時間Cell ID測位モードと判断する(S340)。そして、位置情報生成部240は、無線通信部220を介して受信される移動通信システムの移動局位置決定センター(MPC)のデータを用いて実時間でCell ID測位を行う(S344)。
【0048】
続いて、無線測位装置100により生成された位置情報は、所定の記憶部(不図示)に記憶されてもよく、所定の表示部(不図示)を介して使用者が認識できる形態で表示されてもよい(S350)。記憶部及び表示部は、無線測位装置100に含まれてもよく、無線測位装置100の適用される移動端末機に含まれてもよい。
【0049】
また、無線測位装置100は、所定の測位中断状況、例えば、電源がオフ(off)になったり、又は使用者による測位中断の要求を受信する等の状況が発生しないうちには、前述した動作を行って位置情報を生成することができる(S360)。
【0050】
一方、本発明の実施例は、コンピュータ読み取り可能な記録媒体に、コンピュータ読み込み可能なプログラムコードを記録して具現することが可能である。本発明の実施例がソフトウェアを用いて実行される場合、本発明の構成手段は、必要な作業を実行するコードセグメントである。尚、プログラム又はコードセグメントは、コンピュータのプロセッサで読み取り可能な媒体に格納されてもよく、伝送媒体又は通信網を介して搬送波と結合したコンピュータデータ信号として伝送されてもよい。
【0051】
コンピュータ読み取り可能な記録媒体には、コンピュータシステムで読み込み可能なデータを記憶するいかなる記録装置をも含むことができる。例えば、コンピュータ読み取り可能な記録媒体には、ROM、RAM、CD−ROM、磁気テープ、フロッピー(登録商標)ディスク、光ディスク記憶装置などを含むことができる。また、ネットワークで接続したコンピュータシステムにコンピュータ読み取り可能な記録媒体を分散配置し、コンピュータ読み込み可能なコードが分散方式で記憶され実行されるようにしてもよい。
【0052】
以上、実施例を参照して本発明を説明してきた。しかし、当業者には、本発明の本質的な技術的思想を逸脱しない範囲内で、本発明の種々の変形形態が可能であるということが理解できるであろう。したがって、開示された実施例は、限定的な観点ではなく説明的な観点で考慮せねばならない。すなわち、本発明の真正の技術的範囲は、添付した特許請求の範囲に開示されており、特許請求の範囲と均等な範囲内における差異点はいずれも、本発明に含まれるものと解釈しなければならない。
【技術分野】
【0001】
本発明は、無線測位技術に関し、特に、リソースの制限された移動端末機環境において適応的な測位方式を適用することによって、位置測定の正確性及び迅速性を考慮するとともに、エネルギーの効率を改善することができる無線測位装置及び方法並びにこれを用いる移動端末機に関するものである。
【背景技術】
【0002】
近年、携帯電話やPDAのような移動通信端末機の普及率が急増するに伴い、移動通信端末機を用いる様々な無線インターネットサービスが紹介されている。特に、位置ベースサービス(LBS:Location Based Service)は、広範囲な活用性及び利便性から大きく脚光を浴びている。例えば、位置ベースサービスは、救助要請や犯罪申告に適切に対応する必要がある場合、多数の地域の地理的情報や交通情報が必要な場合、位置によって移動通信料金を差別化する場合、物流管制を行う場合を含め、様々な分野及び状況に適用可能である。このような位置ベースサービスを実現するためには、移動通信端末機の位置を把握する技術である無線測位技術(PDT:Position Determination Technology)が必須である。
【0003】
かかる無線測位技術には、移動通信ネットワークの基地局受信信号を用いるネットワークベース(Network Based)方式、端末機に装着されるGPS(Global Positioning System)信号受信機などを用いる端末機ベース(Handset Based)方式、及びこれら両方式を混合して使用するハイブリッド(Hybrid)方式がある。
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、ネットワークベース方式は、移動通信基地局のセル(Cell)の大きさや位置決定方式によって、500mから数kmに至る位置誤差が生じるため、正確度が落ちるという問題があった。また、端末機ベース方式及びハイブリッド方式は、GPS信号を用いるため、悪天候の場合又は室内や地下に位置する場合のように無線通信環境が劣悪な場合には適用しにくいという問題があった。さらに、これらの方式はリソースの制限された移動端末機環境においてエネルギー効率を全く考慮していないという問題もあった。
【0005】
本発明の実施例は、リソースの制限された移動端末機環境において、適応的な測位方式を適用することによって、位置測定の正確性及び迅速性を考慮すると同時にエネルギーの効率を改善する。
【0006】
また、本発明の実施例は、様々な無線通信環境において位置測定を可能にすることによって、使用者の利便性を改善する。
【0007】
また、本発明の属する技術の分野における通常の知識を有する者には、本発明の実施例が、以上に言及していない他の技術的課題を解決できるということが、下記の記載から明確に理解できるであろう。
【課題を解決するための手段】
【0008】
本発明の一実施例に係る無線測位装置は、特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断部と、判断された測位モードが、前記Stand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、を含む。
【0009】
一実施例において、前記測位モード判断部は、予め定められた周期的測位状況が発生すると、前記周期的測位状況に対応する測位モードを前記Stand−Alone GPS測位モードと判断する。
【0010】
一実施例において、前記測位モード判断部は、予め定められた実時間測位状況が発生すると、前記実時間測位状況に対応する測位モードを前記AGPS測位モードと判断する。
【0011】
一実施例において、前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、前記位置情報生成部は、前記受信された前記GPS信号を用いて前記周期毎に前記Stand−Alone GPS測位を行う。
【0012】
一実施例において、前記無線測位装置は、位置決定サーバー(PDE:Position Determination Entity)を有する移動通信システムと通信を行う無線通信部をさらに含み、前記位置情報生成部は、前記無線通信部を介して受信される前記位置決定サーバーのデータを用いて実時間で前記AGPS測位を行う。
【0013】
本発明の他の一実施例に係る無線測位装置は、特定状況が発生する場合に、Cell ID測位モード、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断部と、判断された測位モードが前記Cell ID測位モードであると、予め定められた第1周期毎に又は実時間でCell ID測位を行って位置情報を生成し、判断された測位モードが前記Stand−Alone GPS測位モードであると、予め定められた第2周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、を含む。
【0014】
一実施例において、前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、前記測位モード判断部は、前記GPS信号受信部によるGPS信号受信に失敗した状況が発生すると、前記失敗状況に対応する測位モードを前記Cell ID測位モードと判断する。
【0015】
一実施例において、前記無線測位装置は、移動局位置決定センター(MPC:Mobile Positioning Center)を有する移動通信システムと通信を行う無線通信部をさらに含み、前記測位モード判断部は、前記Cell ID測位モード状態で予め定められた周期的測位状況が発生すると、前記Cell ID測位モードを周期的Cell ID測位モードと判断し、前記位置情報生成部は、前記無線通信部を介して受信される前記移動局位置決定センターのデータを用いて前記第1周期毎にCell ID測位を行う。
【0016】
一実施例において、前記測位モード判断部は、前記Cell ID測位モード状態で予め定められた実時間測位状況が発生すると、前記Cell ID測位モードを実時間Cell ID測位モードと判断し、前記位置情報生成部は、前記無線通信部を介して受信される前記移動局位置決定センターのデータを用いて実時間でCell ID測位を行う。
【0017】
本発明の一実施例に係る移動端末機は、GPS衛星から受信するGPS信号及び移動通信システムの位置決定サーバー(PDE)から受信するデータを用いて、予め定められた周期的測位状況が発生する場合に、予め定められた周期毎にStand−Alone GPS測位を行い、予め定められた実時間測位状況が発生する場合に、実時間でAGPS測位を行う無線測位装置と、前記無線測位装置の測位により生成される位置情報を表示する表示部と、を含む。
【0018】
本発明の一実施例に係る無線測位方法は、GPS信号受信部及び無線通信部を含む無線測位装置を通じて無線測位を行う方法であり、特定状況が発生する場合に、無線測位装置でCell ID測位モード、Stand−Alone GPS測位モード及びAGPS測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断段階と、前記無線測位装置で前記判断された測位モードが前記Cell ID測位モードであると、予め定められた第1周期毎に又は実時間でCell ID測位を行って位置情報を生成し、前記判断された測位モードが前記Stand−Alone GPS測位モードであると、予め定められた第2周期毎にStand−Alone GPS測位を行って位置情報を生成し、そして前記判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成段階と、を含む。
【発明の効果】
【0019】
上記のように、本発明の実施例は、リソースの制限された移動端末機環境において、状況の変化に応じて適応的に測位方式を選択して行わせることにより、位置測定の正確性及び迅速性を考慮しながらもエネルギーの効率を改善することができる。
また、本発明の実施例は、GPS信号の受信が不可能な環境でも位置測定を可能にしたため、使用者の利便性をさらに改善することが可能になる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施例が適用され得る移動通信システムの環境を示す図である。
【図2】本発明の一実施例に係る無線測位装置を示すブロック図である。
【図3】本発明の一実施例に係る無線測位方法を示すフローチャートである。
【発明を実施するための形態】
【0021】
以下、本発明の技術的課題に関する解決方案を明確化するために、添付図面を参照して本発明の好適な実施例について詳細に説明する。ただし、下記の説明において、関連する公知技術に関する説明が本発明の要旨をかえって不明瞭にすると判断される場合は、その詳細な説明を省略する。また、後述する用語は、本発明での機能を考慮して定義された用語であり、これは、使用者、運用者などの意図又は慣例などによって変更されてもよい。したがって、その定義は、本明細書の全般にわたる内容に基づいて行わなければならない。
【0022】
図1には、本発明の実施例が適用され得る移動通信のネットワーク環境を示す。
【0023】
図1に示すように、移動通信のネットワーク環境100は、移動端末機110、GPS衛星120、基地局130、移動交換局(MSC:Mobile Switching Center)140、及びネットワークベース測位システム150,160を含むことができる。
【0024】
移動端末機110は、無線測位装置及び表示部を含み、無線測位を行うことができる。例えば、無線測位装置は、GPS衛星120から受信するGPS信号、及び移動通信システムの位置決定サーバー(PDE:Position Determination Entity)152から受信するデータを用いて、予め定められた周期的測位状況が発生すると、予め定められた周期毎にStand−Alone GPS測位を行い、予め定められた実時間測位状況が発生すると、実時間でAGPS(Assisted GPS)測位を行う。そして、表示部は、無線測位装置の測位により生成される位置情報を、使用者が認識できるように表示する。
【0025】
一実施例において、無線測位装置は、測位モード判断部及び位置情報生成部を含むことができる。測位モード判断部は、特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS測位モードを含む測位モードのうち、当該特定状況に対応する測位モードを判断する。そして、位置情報生成部は、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する。この場合、測位モード判断部は、周期的測位状況が発生すると、当該周期的測位状況に対応する測位モードをStand−Alone GPS測位モードと判断し、実時間測位状況が発生すると、当該実時間測位状況に対応する測位モードをAGPS測位モードと判断することができる。
【0026】
一方、GPS衛星120は、GPS(Global Positioning System)で移動端末機110の位置を把握するのに用いられる衛星である。GPS衛星120は、位置計算のために必要な航法データを搬送波(Carrier Wave)を用いて移動端末機110に連続して伝送する24基の衛星から構成され、これらのうち、21基の衛星は航法に用いられ、3基の衛星は予備用として配置されるとよい。
【0027】
基地局130の基地局伝送器(BTS:Base Transceiver Station)132は、無線送受信機から構成された装備で、無線アクセスネットワーク(Radio Access Network:RAN)内の移動端末機110と無線リンクを通じて音声通話及びパケットデータを送/受信する。そして、基地局130の基地局制御器(BSC:Base Station Controller)134は、多数の基地局伝送器132を管理し、無線チャンネル設定(Setup)、周波数ホッピング(Frequency Hopping)、ハンドオーバー(Handover)処理などを担当する。
【0028】
移動交換局(MSC:Mobile Switching Center)140は、移動端末機110の移動性管理、位置登録/管理、認証、ハンドオーバー、ローミングなどを担当する。
【0029】
移動通信システムに含まれるネットワークベース測位システム150,160の位置決定サーバー(PDE:Position Determination Entity)152は、移動端末機110の伝送したGPS情報から緯度/経度情報などを計算する。
【0030】
ネットワークベース測位システム150,160の移動局位置決定センター(MPC:Mobile Positioning Center)162は、移動端末機110に対するGPS測位に失敗する場合に、移動交換局140を介してCell−ID方式の測位を処理し、移動端末機110に関する基地局Cell情報を移動端末機110などに伝送する。
【0031】
以下、図2及び図3を参照して本発明の実施例についてより具体的に説明する。
【0032】
図2は、本発明の一実施例に係る無線測位装置を示すブロック図である。また、図3は、本発明の一実施例に係る無線測位方法を示すフローチャートである。
【0033】
図2及び図3に示すように、無線測位装置100は、測位モード判断部230及び位置情報生成部240を含む。
まず、無線測位装置100の適用される移動端末機のセッティングや、使用者のキー入力又はメニュー選択により無線測位装置100に測位要求が受信されると、無線測位装置100は測位を開始する(S310)。
【0034】
そして、測位モード判断部230は、特定状況が発生すると、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、当該特定状況に対応する測位モードを判断する(S320、S330、S340)。
【0035】
次に、位置情報生成部240は、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する(S331、S332、S334)。この場合、位置情報生成部240が行うAGPS測位は、移動局補助GPS(MS Assisted GPS )測位又は移動局ベースGPS(MS Based GPS)測位でよい。
【0036】
Stand−Alone GPS測位方式は、米国国防省が管理し、20,000Km上空の地球軌道を回る24基のGPS人工衛星のうちの3基から1.5GHzの周波数帯域、2400乃至4800bpsの低い伝送速度による衛星軌道情報を受信して、三角測量法で緯度、経度、海抜の位置情報を把握し、もう一つの衛星信号を更に受信及び分析して時間情報を把握する方式である。Stand−Alone GPS測位方式は、誤差範囲が数m乃至数十m程度と比較的精密であるという利点があるが、低い伝送速度の信号を受信及び復調して応用するまでの実際の所要時間であるTTFF(TIME TO FIRST FIX)が約1分以上から数十分もかかるなど、測位に時間がかかるという欠点がある。
【0037】
そのため、測位モード判断部230は、予め定められた周期的測位状況が発生する場合、例えば、無線測位装置100の適用された移動端末機がブートを始めて移動通信ネットワーク上に存在したり通話待機状態にあるなどのように正常状況が発生する場合、その外に特別なイベントがない場合などには、周期的測位状況に対応する測位モードをStand−Alone GPS測位モードと判断する(S330)。続いて、位置情報生成部240は、GPS衛星から受信されたGPS信号を用いてStand−Alone GPS測位を行う(S331、S332)。この場合、位置情報生成部240は、エネルギー効率のために、予め定められた周期毎にStand−Alone GPS測位を行う。このために、無線測位装置100は、GPS衛星からGPS信号を受信するGPS信号受信部210を含むことができる。また、予め定められた周期をカウントするタイマー部250をさらに含むことができる。尚、測位を行う周期は、無線測位装置100の適用される環境を考慮して決定するとよい。例えば、520mAh容量のバッテリを使用する小型移動端末機環境においてコール(Call)を試みる際、520mAhが消耗され、測位時間が30秒程度かかるとすれば、待機時間を24時間以上保持するために、測位周期は12分程度とすることができる。
【0038】
また、AGPS測位方式は、移動通信システムベース端末機補助GPS(MS−Assisted Network−Based GPS)、すなわち、MS Assisted GPS方式と、移動通信システム補助端末機ベースGPS(MS−Based Network−Assisted GPS)、すなわち、MS Based GPS方式とに区別できる。MS Assisted GPS方式とMS Based GPS方式は、移動端末機(MS)の位置情報を計算又は演算するために、移動通信システムの位置決定サーバー(PDE)から伝送される補助(Aiding)データを受信し、一つ以上のGPS衛星から受信されたGPS信号を分析して位置情報を演算する方式である。
【0039】
特に、MS Assisted GPS方式は、移動端末機が受信したGPS情報を移動通信システムに伝送し、該移動通信システムの位置決定サーバー(PDE)でGPS情報と既存に知っているGPS衛星の散布などの情報に対する検索結果の値に基づいて最終位置の値を計算し、それを移動端末機に伝送する方式である。
【0040】
また、MS−Based GPS方式は、移動端末機が移動通信システムの位置決定サーバー(PDE)からGPS衛星の補助(Aiding)データの値を受信し、該受信した補助データに基づき、非常に短いTTFFの間に、指定されたGPS人工衛星からGPS信号を受信及び自体演算することで、現在位置の経度、緯度、海抜などに関する位置情報を生成する方式である。この場合、補助データは、GPS衛星を用いる位置確認方式において先行的に確保すべき必須情報であり、GPS衛星の軌道情報を表示するアルマナック(ALMANAC)情報及びGPS衛星の飛行速度又は移動速度の情報を表示するエフェメリス(EPHEMERIS)情報を表す。
【0041】
したがって、測位モード判断部230は、予め定められた実時間測位状況が発生する場合、例えば、無線測位装置100の適用された移動端末機がバッテリ切れ寸前だったり、他の移動端末機への緊急通話要請に失敗するなどのように緊急状態が発生する場合、使用者による実時間位置照会要請がある場合、その他の特別なイベントが発生する場合などには、実時間測位状況に対応する測位モードをAGPS測位モードと判断する(S330)。すると、位置情報生成部240は、GPS衛星から受信されたGPS信号及び移動通信システムに位置する位置決定サーバー(PDE:Position Determination Entity)のデータを用いてAGPS測位を行う(S334)。この場合、位置情報生成部240は、迅速かつ正確な位置情報を提供するために実時間でAGPS測位を行う。このために、無線測位装100は、位置決定サーバー(PDE)を有する移動通信システムと通信を行う無線通信部220をさらに含むことができる。又、前述したように、位置情報生成部240は、実施例に応じて移動局補助GPS(MS Assisted GPS)測位を行ったり、移動局ベースGPS(MS Based GPS)測位を行ったりして、位置情報を生成することができる。
【0042】
一方、Stand−Alone GPS測位方式及びAGPS測位方式は、GPS信号を必須に要求する方式である。その結果、GPS衛星の数が足りない場合、悪天候な場合、又は室内や地下に位置する場合のように無線通信環境が劣悪な場合には、無線測位装置の正常的な動作が不可能になる。
【0043】
したがって、一実施例において、測位モード判断部230は、特定状況が発生する場合に、Cell ID測位モード、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、当該特定状況に対応する測位モードを判断することができる(S320、S330、S340)。
【0044】
次に、位置情報生成部240は、判断された測位モードがCell ID測位モードであると、予め定められた第1周期毎に或いは実時間でCell ID測位を行って位置情報を生成し、判断された測位モードがStand−Alone GPS測位モードであると、予め定められた第2周期毎にStand−Alone GPS測位を行って位置情報を生成し、そして判断された測位モードがAGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成すればよい(S331、S332、S334、S341、S342、S344)。
【0045】
一実施例において、測位モード判断部230は、GPS信号受信部210によるGPS信号の受信に失敗する状況が発生する場合に、この失敗状況に対応する測位モードをCell ID測位モードと判断する(S320)。
【0046】
また、測位モード判断部230は、Cell ID測位モード状態で予め定められた周期的測位状況が発生する場合、例えばGPS信号の受信に失敗したが他に特別なイベントがない場合などには、Cell ID測位モードを周期的Cell ID測位モードと判断する(S340)。そして、位置情報生成部240は、無線通信部220を介して受信される移動局位置決定センター(MPC:Mobile Positioning Center)のデータを用いて、第1周期毎にCell ID測位を行う(S341、S342)。この場合、位置情報生成部240は、タイマー部250を用いて第1周期をカウントできる。尚、無線測位装置100は、移動局位置決定センター(MPC)を有する移動通信システムと通信を行う別の無線通信部を含んでもよい。
【0047】
さらに、測位モード判断部230は、Cell ID測位モード状態で予め定められた実時間測位状況が発生する場合、例えばGPS信号の受信に失敗した状態で、無線測位装置100の適用された移動端末機がバッテリ切れ寸前だったり他の移動端末機への緊急通話要請に失敗するなどのように緊急状態が発生する場合、使用者による実時間位置照会要請がある場合、その他の特別なイベントが発生する場合などには、Cell ID測位モードを実時間Cell ID測位モードと判断する(S340)。そして、位置情報生成部240は、無線通信部220を介して受信される移動通信システムの移動局位置決定センター(MPC)のデータを用いて実時間でCell ID測位を行う(S344)。
【0048】
続いて、無線測位装置100により生成された位置情報は、所定の記憶部(不図示)に記憶されてもよく、所定の表示部(不図示)を介して使用者が認識できる形態で表示されてもよい(S350)。記憶部及び表示部は、無線測位装置100に含まれてもよく、無線測位装置100の適用される移動端末機に含まれてもよい。
【0049】
また、無線測位装置100は、所定の測位中断状況、例えば、電源がオフ(off)になったり、又は使用者による測位中断の要求を受信する等の状況が発生しないうちには、前述した動作を行って位置情報を生成することができる(S360)。
【0050】
一方、本発明の実施例は、コンピュータ読み取り可能な記録媒体に、コンピュータ読み込み可能なプログラムコードを記録して具現することが可能である。本発明の実施例がソフトウェアを用いて実行される場合、本発明の構成手段は、必要な作業を実行するコードセグメントである。尚、プログラム又はコードセグメントは、コンピュータのプロセッサで読み取り可能な媒体に格納されてもよく、伝送媒体又は通信網を介して搬送波と結合したコンピュータデータ信号として伝送されてもよい。
【0051】
コンピュータ読み取り可能な記録媒体には、コンピュータシステムで読み込み可能なデータを記憶するいかなる記録装置をも含むことができる。例えば、コンピュータ読み取り可能な記録媒体には、ROM、RAM、CD−ROM、磁気テープ、フロッピー(登録商標)ディスク、光ディスク記憶装置などを含むことができる。また、ネットワークで接続したコンピュータシステムにコンピュータ読み取り可能な記録媒体を分散配置し、コンピュータ読み込み可能なコードが分散方式で記憶され実行されるようにしてもよい。
【0052】
以上、実施例を参照して本発明を説明してきた。しかし、当業者には、本発明の本質的な技術的思想を逸脱しない範囲内で、本発明の種々の変形形態が可能であるということが理解できるであろう。したがって、開示された実施例は、限定的な観点ではなく説明的な観点で考慮せねばならない。すなわち、本発明の真正の技術的範囲は、添付した特許請求の範囲に開示されており、特許請求の範囲と均等な範囲内における差異点はいずれも、本発明に含まれるものと解釈しなければならない。
【特許請求の範囲】
【請求項1】
特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断部と、
判断された測位モードが、前記Stand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、
を含む無線測位装置。
【請求項2】
前記測位モード判断部は、予め定められた周期的測位状況が発生すると、前記周期的測位状況に対応する測位モードを前記Stand−Alone GPS測位モードと判断する、請求項1に記載の無線測位装置。
【請求項3】
前記測位モード判断部は、予め定められた実時間測位状況が発生すると、前記実時間測位状況に対応する測位モードを前記AGPS測位モードと判断する、請求項1または2に記載の無線測位装置。
【請求項4】
前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、
前記位置情報生成部は、受信された前記GPS信号を用いて前記周期毎に前記Stand−Alone GPS測位を行う、請求項1乃至3のいずれか1項に記載の無線測位装置。
【請求項5】
前記無線測位装置は、位置決定サーバー(PDE:Position Determination Entity)を有する移動通信システムと通信を行う無線通信部をさらに含み、
前記位置情報生成部は、前記無線通信部を介して受信される前記位置決定サーバーのデータを用いて実時間で前記AGPS測位を行う、請求項1乃至4のいずれか1項に記載の無線測位装置。
【請求項6】
前記位置情報生成部が行うAGPS測位は、移動局補助GPS(MS Assisted GPS)測位又は移動局ベースGPS(MS Based GPS)測位である、請求項1乃至5のいずれか1項に記載の無線測位装置。
【請求項7】
特定状況が発生する場合に、Cell ID測位モード、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断部と、
判断された測位モードが前記Cell ID測位モードであると、予め定められた第1周期毎に又は実時間でCell ID測位を行って位置情報を生成し、判断された測位モードが前記Stand−Alone GPS測位モードであると、予め定められた第2周期毎にStand−Alone GPS測位を行って位置情報を生成し、そして判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、
を含む無線測位装置。
【請求項8】
前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、
前記測位モード判断部は、前記GPS信号受信部によるGPS信号受信に失敗した状況が発生すると、前記失敗状況に対応する測位モードを前記Cell ID測位モードと判断する、請求項7に記載の無線測位装置。
【請求項9】
前記無線測位装置は、移動局位置決定センター(MPC:Mobile Positioning Center)を有する移動通信システムと通信を行う無線通信部をさらに含み、
前記測位モード判断部は、前記Cell ID測位モード状態で予め定められた周期的測位状況が発生すると、前記Cell ID測位モードを周期的Cell ID測位モードと判断し、
前記位置情報生成部は、前記無線通信部を介して受信される前記移動局位置決定センターのデータを用いて前記第1周期毎にCell ID測位を行う、請求項7又は8に記載の無線測位装置。
【請求項10】
前記測位モード判断部は、前記Cell ID測位モード状態で予め定められた実時間測位状況が発生すると、前記Cell ID測位モードを実時間Cell ID測位モードと判断し、
前記位置情報生成部は、前記無線通信部を介して受信される前記移動局位置決定センターのデータを用いて実時間でCell ID測位を行う、請求項7乃至9のいずれか1項に記載の無線測位装置。
【請求項11】
前記測位モード判断部は、予め定められた周期的測位状況が発生すると、前記周期的測位状況に対応する測位モードを前記Stand−Alone GPS測位モードと判断する、請求項7乃至10のいずれか1項に記載の無線測位装置。
【請求項12】
前記測位モード判断部は、予め定められた実時間測位状況が発生すると、前記実時間測位状況に対応する測位モードを前記AGPS測位モードと判断する、請求項7乃至11のいずれか1項に記載の無線測位装置。
【請求項13】
前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、
前記位置情報生成部は、受信された前記GPS信号を用いて前記Stand−Alone GPS測位を行う、請求項7乃至12のいずれか1項に記載の無線測位装置。
【請求項14】
前記無線測位装置は、位置決定サーバー(PDE:Position Determination Entity)を有する移動通信システムと通信を行う無線通信部をさらに含み、
前記位置情報生成部は、前記無線通信部を介して受信される前記位置決定サーバーのデータを用いて前記AGPS測位を行う、請求項7乃至13のいずれか1項に記載の無線測位装置。
【請求項15】
前記位置情報生成部が行うAGPS測位は、移動局補助GPS(MS Assisted GPS)測位又は移動局ベースGPS(MS Based GPS)測位である、請求項7乃至14のいずれか1項に記載の無線測位装置。
【請求項1】
特定状況が発生する場合に、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断部と、
判断された測位モードが、前記Stand−Alone GPS測位モードであると、予め定められた周期毎にStand−Alone GPS測位を行って位置情報を生成し、判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、
を含む無線測位装置。
【請求項2】
前記測位モード判断部は、予め定められた周期的測位状況が発生すると、前記周期的測位状況に対応する測位モードを前記Stand−Alone GPS測位モードと判断する、請求項1に記載の無線測位装置。
【請求項3】
前記測位モード判断部は、予め定められた実時間測位状況が発生すると、前記実時間測位状況に対応する測位モードを前記AGPS測位モードと判断する、請求項1または2に記載の無線測位装置。
【請求項4】
前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、
前記位置情報生成部は、受信された前記GPS信号を用いて前記周期毎に前記Stand−Alone GPS測位を行う、請求項1乃至3のいずれか1項に記載の無線測位装置。
【請求項5】
前記無線測位装置は、位置決定サーバー(PDE:Position Determination Entity)を有する移動通信システムと通信を行う無線通信部をさらに含み、
前記位置情報生成部は、前記無線通信部を介して受信される前記位置決定サーバーのデータを用いて実時間で前記AGPS測位を行う、請求項1乃至4のいずれか1項に記載の無線測位装置。
【請求項6】
前記位置情報生成部が行うAGPS測位は、移動局補助GPS(MS Assisted GPS)測位又は移動局ベースGPS(MS Based GPS)測位である、請求項1乃至5のいずれか1項に記載の無線測位装置。
【請求項7】
特定状況が発生する場合に、Cell ID測位モード、Stand−Alone GPS測位モード及びAGPS(Assisted GPS)測位モードを含む測位モードのうち、前記特定状況に対応する測位モードを判断する測位モード判断部と、
判断された測位モードが前記Cell ID測位モードであると、予め定められた第1周期毎に又は実時間でCell ID測位を行って位置情報を生成し、判断された測位モードが前記Stand−Alone GPS測位モードであると、予め定められた第2周期毎にStand−Alone GPS測位を行って位置情報を生成し、そして判断された測位モードが前記AGPS測位モードであると、実時間でAGPS測位を行って位置情報を生成する位置情報生成部と、
を含む無線測位装置。
【請求項8】
前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、
前記測位モード判断部は、前記GPS信号受信部によるGPS信号受信に失敗した状況が発生すると、前記失敗状況に対応する測位モードを前記Cell ID測位モードと判断する、請求項7に記載の無線測位装置。
【請求項9】
前記無線測位装置は、移動局位置決定センター(MPC:Mobile Positioning Center)を有する移動通信システムと通信を行う無線通信部をさらに含み、
前記測位モード判断部は、前記Cell ID測位モード状態で予め定められた周期的測位状況が発生すると、前記Cell ID測位モードを周期的Cell ID測位モードと判断し、
前記位置情報生成部は、前記無線通信部を介して受信される前記移動局位置決定センターのデータを用いて前記第1周期毎にCell ID測位を行う、請求項7又は8に記載の無線測位装置。
【請求項10】
前記測位モード判断部は、前記Cell ID測位モード状態で予め定められた実時間測位状況が発生すると、前記Cell ID測位モードを実時間Cell ID測位モードと判断し、
前記位置情報生成部は、前記無線通信部を介して受信される前記移動局位置決定センターのデータを用いて実時間でCell ID測位を行う、請求項7乃至9のいずれか1項に記載の無線測位装置。
【請求項11】
前記測位モード判断部は、予め定められた周期的測位状況が発生すると、前記周期的測位状況に対応する測位モードを前記Stand−Alone GPS測位モードと判断する、請求項7乃至10のいずれか1項に記載の無線測位装置。
【請求項12】
前記測位モード判断部は、予め定められた実時間測位状況が発生すると、前記実時間測位状況に対応する測位モードを前記AGPS測位モードと判断する、請求項7乃至11のいずれか1項に記載の無線測位装置。
【請求項13】
前記無線測位装置は、GPS衛星からGPS信号を受信するGPS信号受信部をさらに含み、
前記位置情報生成部は、受信された前記GPS信号を用いて前記Stand−Alone GPS測位を行う、請求項7乃至12のいずれか1項に記載の無線測位装置。
【請求項14】
前記無線測位装置は、位置決定サーバー(PDE:Position Determination Entity)を有する移動通信システムと通信を行う無線通信部をさらに含み、
前記位置情報生成部は、前記無線通信部を介して受信される前記位置決定サーバーのデータを用いて前記AGPS測位を行う、請求項7乃至13のいずれか1項に記載の無線測位装置。
【請求項15】
前記位置情報生成部が行うAGPS測位は、移動局補助GPS(MS Assisted GPS)測位又は移動局ベースGPS(MS Based GPS)測位である、請求項7乃至14のいずれか1項に記載の無線測位装置。
【図1】


【図2】
【図3】
【図2】
【図3】
【公開番号】特開2012−132918(P2012−132918A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2011−280049(P2011−280049)
【出願日】平成23年12月21日(2011.12.21)
【出願人】(510039426)エルジー イノテック カンパニー リミテッド (279)
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成23年12月21日(2011.12.21)
【出願人】(510039426)エルジー イノテック カンパニー リミテッド (279)
【Fターム(参考)】
[ Back to top ]