
無線測距装置、無線端末及び無線測距システム
【課題】折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得によって折り返しパルスを受信し、正確に測距する無線測距システムを提供する。
【解決手段】リーダ制御部25は、タグ−リーダ間の距離を検出するために、送信電力、受信ゲインおよび自折り返しパルスの送信レベルの組合せを周期的に切り替える。第1の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する。この場合、タグAとタグBでは、リーダ5からの送信パルスの受信レベルが第1の閾値より小さいので、折り返し送信しない。タグCでは、送信パルスの受信レベルが第1の閾値より大きいので、折り返し送信する。第2の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する。
【解決手段】リーダ制御部25は、タグ−リーダ間の距離を検出するために、送信電力、受信ゲインおよび自折り返しパルスの送信レベルの組合せを周期的に切り替える。第1の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する。この場合、タグAとタグBでは、リーダ5からの送信パルスの受信レベルが第1の閾値より小さいので、折り返し送信しない。タグCでは、送信パルスの受信レベルが第1の閾値より大きいので、折り返し送信する。第2の組合せでは、リーダ制御部25は、送信電力、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、パルス信号を送信して距離を測定する無線測距装置、無線端末及び無線測距システムに関する。
【背景技術】
【0002】
従来、無線測距システムでは、無線基地局装置であるリーダが無線端末装置であるタグに対してパルス信号を無線によって送信し、タグはパルス信号を受信した後にリーダへ折り返しパルス信号を送信する。リーダは、タグからの折り返しパルス信号を受信するまでの往復時間を基に、タグまでの距離を測定する。
【0003】
この様な無線測距システムにおいて、例えば、UWB(Ultra Wide Band)通信方式は、パルス幅が1ナノ秒以下という短パルス信号を用いるため、マルチパス伝播環境においても高精度な測距を実現できる。
【0004】
この種の先行技術として、多数存在するタグを1つずつ検出するシステムが知られている(例えば特許文献1参照)。このシステムでは、呼掛け機(リーダ)は、先ず送信する信号のレベルを小さく設定し、Pm1の範囲において各トランスポンダ(タグ:14.1〜14.3)を測定する。各トランスポンダ14.1〜14.3の検出はシーケンシャルに実施される。その後、呼掛け機は、各トランスポンダからの信号の受信に応じて受信確認信号を各トランスポンダに送信し、各トランスポンダ14.1〜14.3をスリープモードに遷移させ、信号の反射を停止させる。次に、呼掛け機は、送信する信号のレベルを上げ、Pm2の範囲において各トランスポンダ(14.4〜14.8)を測定する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−344562号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述従来の無線測距システムにおいては、次の様な課題があり、課題の改善が要望された。
【0007】
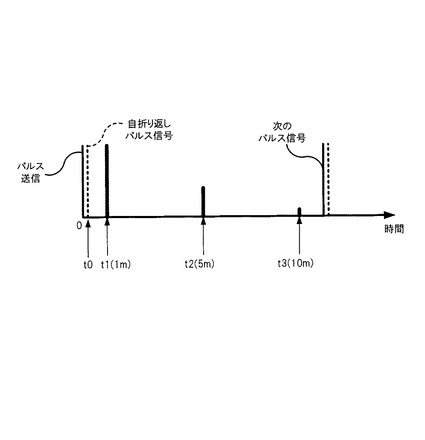
図23は、リーダからの距離に応じて変化する折り返しパルス信号の受信レベルを示す説明図である。図23に示す様に、リーダ−タグ間の距離に応じて、リーダにおいて受信される折り返しパルス信号の受信レベルが大きく異なる。図23においては、自折り返しパルス信号を受信した時間t0から、タグからの折り返しパルス信号を受信するまでの時間t1、t2、t3が示されている。
【0008】
距離1mのタグからの折り返しパルス信号を受信するまでの時間(受信時間)t1における折り返しパルス信号の受信レベルが最も大きい。距離5mのタグからの折り返しパルス信号を受信するまでの受信時間t2、距離10mのタグからの折り返しパルス信号を受信するまでの受信時間t3と距離が長くなるにつれて、タグからの折り返しパルス信号の受信レベルは小さくなっている。
【0009】
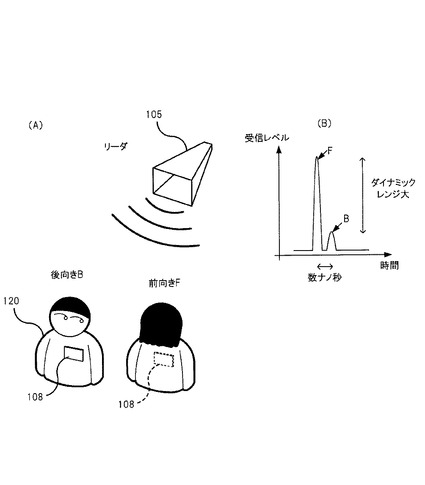
図24は、タグの遮蔽による折り返しパルス信号の受信レベルの変化を示す説明図である。図24(A)は、リーダとタグとの間に遮蔽物(例えば、人体)が存在する場合の説明図である。図24(B)は、人物がリーダに対して前向きである場合と後向きである場合における各折り返しパルス信号の受信レベルを示す説明図である。
【0010】
図24(A)に示す様に、リーダとタグとの間に遮蔽物(例えば、人体)が存在する場合がある。例えば、リーダ105に対し、タグ108を胸ポケットに入れて所持する人物120を想定する。人物120がリーダ105に対して前向きFである場合、リーダ105とタグ108の間に人体である遮蔽物は存在せず、図24(B)に示す様に、折り返しパルス信号の受信レベルFは大きい。一方、人物120がリーダ105に対して後向きBである場合、リーダ105とタグ108との間に人体である遮蔽物が存在し、折り返しパルス信号の受信レベルBは小さい。この様に、リーダ−タグ間の距離とは無関係に、リーダにおいて受信される折り返しパルス信号の受信レベルが小さくなる場合もある。
【0011】
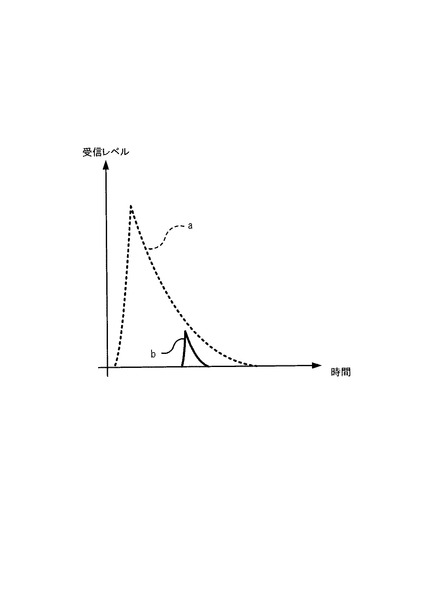
図25は、リーダにおいて受信される折り返しパルス信号の波形を示すグラフである。図25に示す様に、リーダにおいて受信される折り返しパルス信号の波形は、例えば、フィルタの影響により裾の部分に広がりを持つ。このため、受信レベルの大きな折り返しパルス信号aの裾に、受信レベルの小さな折り返しパルス信号bが埋もれてしまい、受信レベルの小さな折り返しパルス信号bの検出が困難となる。
【0012】
以上のように、リーダにおいて受信される折り返しパルス信号の受信レベルは大きく変化するため、リーダは広いダイナミックレンジを持つ必要がある。
【0013】
上述のような課題を解決するために、リーダは、折り返しパルス信号の受信レベルに応じて、適切に受信利得を調整しなければならない。しかし、UWBの様な短パルス信号を用いた場合、単一パルスを用いて受信信号強度であるRSSI(Received Signal Strength Indicator)を生成することは困難である。即ち、短パルス信号を用いない通常の無線機に使用される自動利得制御(AGC:Automatic Gain Control)の実現は困難となる。又、数ナノ秒という短い区間において、折り返しパルス信号毎に可変利得アンプ(VGA:Variable Gain Amp.)の利得を切り替えることは難しい。
【0014】
又、特許文献1では、リーダの受信利得制御については記述されておらず、上述AGCの課題を解決することは困難である。又、範囲内のタグの検出はシーケンシャルに実施されるので、測定に時間がかかる。更に、受信確認信号を検出するために、復調処理を必要とすることは、タグの安価及び省電力の実現を難しくさせる。
【0015】
そこで、本発明は、上述した従来の事情に鑑みてなされたもので、折り返しパルス信号の受信レベルが高速に大きく変動する環境においても、適切な利得によって折り返しパルス信号を受信し、正確に測距する無線測距装置、無線端末及び無線測距システムを提供することを目的とする。
【課題を解決するための手段】
【0016】
本発明は、上述した無線測距装置であって、無線端末にパルス信号を送信する無線測距装置であって、前記無線端末から送信された折り返しパルス信号を検波する検波部と、前記検波部から出力された検波信号を増幅する増幅部と、前記送信されるパルス信号の送信レベルを可変する送信レベル制御部と、前記検波信号を増幅するための利得を可変する受信ゲイン制御部と、前記送信されるパルス信号の送信レベル及び前記利得の大きさの組合せを周期的に切り替えるリーダ制御部と、前記増幅されたパルス信号を基に、前記無線端末の識別情報を検出するタグID検出部と、前記パルス信号の送信タイミングから、前記タグID検出部によって前記識別情報が検出されたパルス信号の受信タイミングまでの時間差を基に、前記無線端末との距離を測距する測距部と、を備える。
【0017】
又、本発明は、上述した無線端末であって、無線測距装置から送信されたパルス信号を受信する無線端末であって、前記受信された前記パルス信号を検波する検波部と、前記検波部から出力された検波信号のレベルを判定する受信レベル判定部と、前記検波信号のレベルが所定の範囲にある場合、前記無線測距装置から送信された前記パルス信号に対する折り返しパルス信号の送信を制御する折り返し制御部と、を備える。
【0018】
又、本発明は、上述した無線測距システムであって、無線端末にパルス信号を送信する無線測距装置と、前記無線測距装置から送信されたパルス信号を受信する無線端末とを含む無線測距システムであって、前記無線測距装置は、前記無線端末から送信された折り返しパルス信号を検波する第1検波部と、前記第1検波部から出力された検波信号を増幅する増幅部と、前記送信されるパルス信号の送信レベルを可変する送信レベル制御部と、前記検波信号を増幅するための利得を可変する受信ゲイン制御部と、前記送信されるパルス信号の送信レベル及び前記利得の大きさの組合せを周期的に切り替えるリーダ制御部と、前記増幅されたパルス信号を基に、前記無線端末の識別情報を検出するタグID検出部と、前記パルス信号の送信タイミングから、前記タグID検出部によって識別情報が検出されたパルス信号の受信タイミングまでの時間差を基に、前記無線端末との距離を測距する測距部と、を備え、前記無線端末は、前記受信された前記パルス信号を検波する第2検波部と、前記第2検波部から出力された検波信号のレベルを判定する受信レベル判定部と、前記検波信号のレベルが所定の範囲にある場合、前記無線測距装置から送信された前記パルス信号に対する折り返しパルス信号の送信を制御する折り返し制御部と、を備える。
【発明の効果】
【0019】
本発明によれば、送信パルスの送信レベルと受信利得の組合せを切り替えるので、折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得により折り返しパルスを受信し、正確に測距できる。
【図面の簡単な説明】
【0020】
【図1】第1の実施形態の無線測距システムにおける測距方法を説明する説明図、(A)リーダから送信されるパルス、リーダにおいて受信される自折り返しパルス、及びタグから送信される折り返しパルスを説明する説明図、(B)リーダとタグとの間の距離の測定を説明する説明図
【図2】リーダとタグとの間において送受信されるパルスのフレームフォーマットの一例を示す説明図、(A)リーダから周期的に送信されるパルスのフレームフォーマット、(B)タグから送信される折り返しパルスのフレームフォーマット
【図3】第1の実施形態におけるリーダの内部構成を示すブロック図
【図4】第1の実施形態におけるタグの内部構成を示すブロック図
【図5】リーダ及びタグの動作を説明する説明図、(A)タグにより検出されるパルスの受信レベルに対して設定された第1の閾値及び第2の閾値を示すグラフ、(B)リーダと、リーダから異なる距離に位置する3つのタグとの位置関係を示す説明図、(C)タグでのパルスの受信レベルの組合せに応じて、利得制御を適切に行い正確な測距を実現するためのリーダにおける制御パターンの一例を示す説明図
【図6】タグの起動期間及びスリープ期間を示すタイミングチャート
【図7】第1の実施形態のリーダの動作手順を示すフローチャート
【図8】第1の実施形態のタグの動作手順を示すフローチャート
【図9】マルチパスによる干渉の低減を説明する説明図、(A)障害物が存在する場合の説明図、(B)マルチパスによる干渉が発生している様子を示す説明図
【図10】自折り返しバルスを検出しないで、パルス送信タイミングを決定する場合のリーダの構成を示す図
【図11】第2の実施形態におけるリーダの内部構成を示すブロック図
【図12】第2の実施形態におけるタグの内部構成を示すブロック図
【図13】リーダ及びタグの送受信を示すタイミングチャート
【図14】トレーニング期間において決定される送信待ち時間を説明する説明図、(A)リーダとリーダから異なる距離に位置する3つのタグとの位置関係を示す説明図、(B)各タグにおいて受信されたパルスの受信レベルを示すグラフ、(C)送信再開時間テーブルの一例を示す説明図
【図15】第2の実施形態のリーダの動作手順を示すフローチャート
【図16】第2の実施形態のタグの動作手順を示すフローチャート
【図17】第3の実施形態におけるリーダの内部構成を示すブロック図
【図18】第3の実施形態におけるタグの内部構成を示すブロック図
【図19】送信パルスのパルスパターンを示すタイミングチャート
【図20】パルス受信レベル及びパルス受信間隔を基に折り返しパルスを返信するか否かの判定を示す説明図、(A)判定テーブルの一例を示す説明図、(B)パルス受信間隔とパルスの受信レベル(電力)との関係の一例を示す説明図
【図21】第3の実施形態のリーダの動作手順を示すフローチャート
【図22】第3の実施形態のタグの動作手順を示すフローチャート
【図23】リーダからの距離に応じて変化する折り返しパルス信号の受信レベルを示す説明図
【図24】タグの遮蔽によるパルスの受信レベルの変化を示す説明図、(A)リーダとタグとの間に遮蔽物(例えば、人体)が存在する場合の説明図、(B)人物がリーダに対して前向きである場合と後向きである場合における各折り返しパルス信号の受信レベルを示す説明図
【図25】リーダにおいて受信される折り返しパルス信号の波形を示すグラフ
【発明を実施するための形態】
【0021】
以下、本発明に係る無線測距装置、無線端末及び無線測距システムの実施形態について、図面を参照して説明する。
【0022】
(第1の実施形態)
本発明に係る無線測距システムは、無線測距装置である無線基地局(以下、「リーダ」という)、及び無線端末である携帯端末装置(以下、「タグ」という)を含む構成である。
【0023】
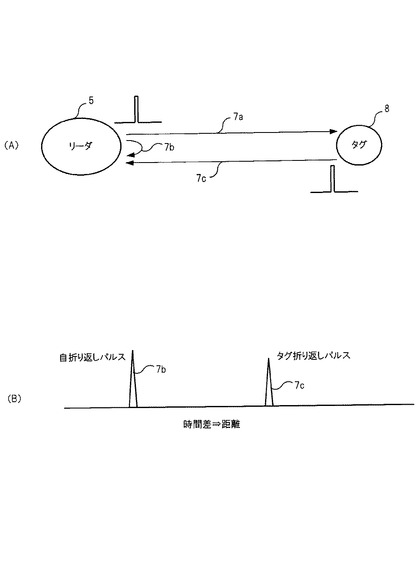
図1は、第1の実施形態の無線測距システムにおける測距方法を説明する説明図である。図1(A)は、リーダから送信されるパルス7a、リーダにおいて受信される自折り返しパルス7b、及びタグから送信される折り返しパルス7cを説明する説明図である。図1(B)は、リーダとタグとの間の距離の測定を説明する説明図である。
【0024】
図1(A)に示す様に、リーダ5は、リーダIDを表すパルス信号(以下、単にパルスともいう)7aをタグ8に送信する。この場合、送信されたパルスは、自装置(リーダ5)において自折り返しパルス7bとして受信される。一方、タグ8は、周期的に起き上がり(スリープ状態から起動状態になり)、リーダ5から送信されたパルスを受信して分析した後、リーダ5に折り返しパルス7cを返信する。リーダ5は、図1(B)に示す様に、自折り返しパルス7bを受信してから、折り返しパルス7cを受信するまでの時間差を計測し、測定した時間差を基に、リーダ5からタグ8までの距離を測定する。
【0025】
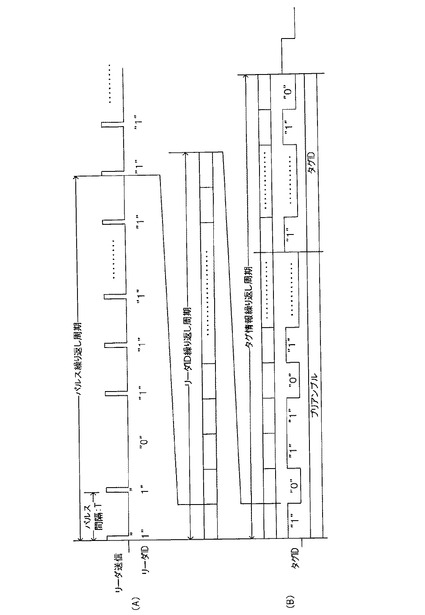
図2は、リーダ5とタグ8との間において送受信されるパルスのフレームフォーマットの一例を示す説明図である。図2(A)に示す様に、リーダ5から周期的に送信されるパルスのフレームフォーマットは、リーダIDを表し、パルス間隔Tごとに値1(パルス送信あり)と値0(パルス送信なし)とにより表される。本実施形態においては、パルス幅1nsのパルスがパルス間隔100nsの周期により送信される。なお、本発明は上述のパルス幅およびパルス間隔に限定されるものではない。
【0026】
又、図2(B)に示す様に、タグから送信される折り返しパルスのフレームフォーマットは、プリアンプル及びタグIDを含む構成であり、リーダ5の送信パルスと同様、値1と値0とにより表される。リーダ5から送信されたパルスに対し、タグ8から送信された折り返しパルスは、非同期にて返信される。なお、本発明は図2に示すフレームフォーマットに限定されるものではない。
【0027】
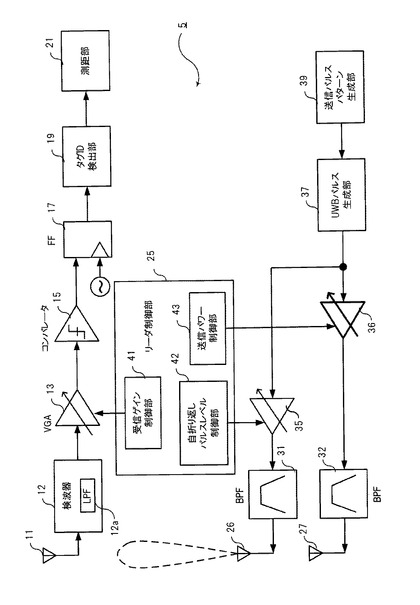
図3は、第1の実施形態におけるリーダ5の内部構成を示すブロック図である。リーダ5は、図3に示す様に、受信アンテナ11、検波器12、可変利得増幅器(VGA)13、コンパレータ15、フリップフロップ(FF)17、タグID検出部19、測距部21、リーダ制御部25、第1送信アンテナ26、第2送信アンテナ27、バンドパスフィルタ(BPF)31,32、VGA35,36、UWBパルス生成部37及び送信パルスパターン生成部39を含む構成である。
【0028】
受信アンテナ11は、タグ8から送信された折り返しパルス、及びリーダ5から送信されたパルスの自折り返しパルスを受信する。受信された折り返しパルス又は自折り返しパルスは検波器12に入力される。
【0029】
検波部としての検波器12は、ローパスフィルタ(LPF)12aを有し、受信アンテナ11において受信されたパルスを検波し、検波信号をVGA13に出力する。なお、図3において、ローパスフィルタ12aは、検波器12に含まれる構成であるが、検波器12からの出力を入力可能に検波器12とは別に構成されても良い。なお、ローパスフィルタが検波部に含まれている構成が検波部とは別に構成されても良いことは、後述の各実施形態においても同様である。
【0030】
増幅部としての可変利得増幅器(VGA)13は、折り返しパルス及び自折り返しパルスを検出するために後述する受信ゲイン制御部41によって調整されたゲインによって、検波器12から出力された検波信号を増幅して出力する。
【0031】
コンパレータ15は、VGA13から出力された信号を2値信号に変換する。
【0032】
フリップフロップ(FF)17は、コンパレータ15により変換された2値信号をサンプリングする。なお、フリップフロップ17には、リーダ5に内蔵される基準信号発振器からのリファレンス信号が供給されている。フリップフロップ17は、リファレンス信号を所定倍に逓倍した信号に基づいて、コンパレータ15から出力された2値信号をサンプリングする。フリップフロップ17に供給されているリファレンス信号については後述の各実施形態においても同様である。
【0033】
タグID検出部19は、フリップフロップ17のサンプリングによって出力された2値信号を基に、タグ8の識別情報であるタグIDを判定する。更に、タグID検出部19は、タグIDが検出された折り返しパルスの受信タイミングを測距部21に出力する。タグID検出部19は、例えば、複数の受信タイミングで受信されるパルス信号のそれぞれについて、既知であるプリアンブルパターンの検出処理を行い、プリアンブルパターンの検出を契機に引き続き受信されるタグIDの検出を行う。
【0034】
測距部21は、タグID検出部19から出力された受信タイミングと自折り返しパルスの送信タイミングとの時間差を基に、タグIDが検出されたタグ8とリーダ5との距離を測定する。
【0035】
リーダ制御部25について説明する。
【0036】
リーダ制御部25は、受信ゲイン制御部41、自折り返しパルスレベル制御部42及び送信レベル制御部としての送信パワー制御部43を含む構成である。本実施形態においては、リーダ制御部25は、折り返しパルスの受信レベルが大きく異なるタグを区別して検出するために、送信電力、受信ゲイン及び自折り返しパルスの送信レベルを制御する。受信ゲインは、検波器12から出力された検波信号を増幅するために用いられるゲインである。なお、リーダ制御部25の各部の動作については後述する。
【0037】
送信パルスパターン生成部39は、リーダ5に固有の送信パターン信号(図2(A)参照)を生成し、生成された送信パターン信号をUWBパルス生成部37に出力する。
【0038】
UWBパルス生成部37は、送信パルスパターン生成部39から出力された送信パターン信号の立ち上がりに同期してUWBパルス信号を生成する。UWBパルス生成部37は、生成されたUWBパルス信号をVGA35,36にそれぞれ出力する。
【0039】
VGA35,36は、自折り返しパルスレベル制御部42,送信パワー制御部43により調整されたゲインによって、UWBパルス生成部37から出力されたUWBパルス信号を増幅する。VGA35により増幅されたUWBパルス信号は、BPF31によってUWBパルス信号の帯域が制限された後、自折り返しパルスとして、指向性を有する第1送信アンテナ26から受信アンテナ11に向けて送信される。一方、VGA36により増幅されたUWBパルス信号は、BPF32によってUWBパルス信号の帯域が制限された後、送信パルスとして、第2送信アンテナ27からタグ8に送信される。
【0040】
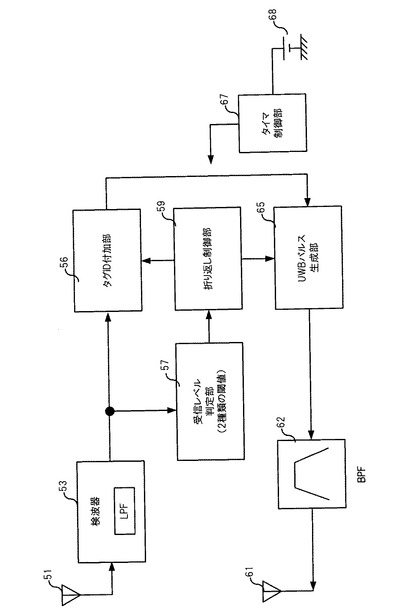
図4は、第1の実施形態におけるタグ8の内部構成を示すブロック図である。タグ8は、図4に示す様に、受信アンテナ51、検波器53、タグID付加部56、受信レベル判定部57、折り返し制御部59、送信アンテナ61、バンドパスフィルタ(BPF)62、UWBパルス生成部65、タイマ制御部67及び電源68を含む構成である。
【0041】
受信アンテナ51は、リーダ5から送信されたパルスを受信する。受信されたパルスは検波器53に入力される。
【0042】
検波器53は、ローパスフィルタ(LPF)53aを有し、受信アンテナ51において受信されたパルスを検波し、検波信号をタグID付加部56及び受信レベル判定部57にそれぞれ出力する。なお、図4において、ローパスフィルタ53aは、検波器53に含まれる構成であるが、検波器53からの出力を入力可能に検波器53とは別に構成されても良い。
【0043】
受信レベル判定部57は、後述する様に、2つの閾値を予め有しており、検波器53により検波されたパルス信号の受信レベルを測定し、測定された受信レベルを基に、リーダ5に対して折り返しパルスを送信するか否かを判定する。受信レベル判定部57は、判定結果を折り返し制御部59に出力(通知)する。
【0044】
折り返し制御部59は、受信レベル判定部57の判定結果を基に、リーダ5に対して折り返しパルスを送信する場合、タグID付加部56及びUWBパルス生成部65を動作させる。
【0045】
タグID付加部56は、検波器53により検波されたパルス信号に対し、自タグIDを表すパルスのON/OFFを制御し、その結果、値1と値0とにより表される自タグIDの信号をUWBパルス生成部65に出力する。
【0046】
UWBパルス生成部65は、タグID付加部56から出力された信号を基に、タグID付加部56から出力された信号の立ち上がりに同期するUWBパルス信号を生成する。UWBパルス信号は、BPF62においてUWBパルス信号の帯域が制限され、送信アンテナ61から折り返しパルスとして送信される。
【0047】
又、タグ8は、タイマ制御部67の動作により、周期ごとに起動状態又はスリープ状態を繰り返す。起動時には電源68によりタグ8の各部が通電され、スリープ時にはタグ8の各部への通電が遮断される。
【0048】
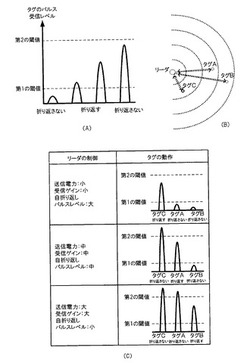
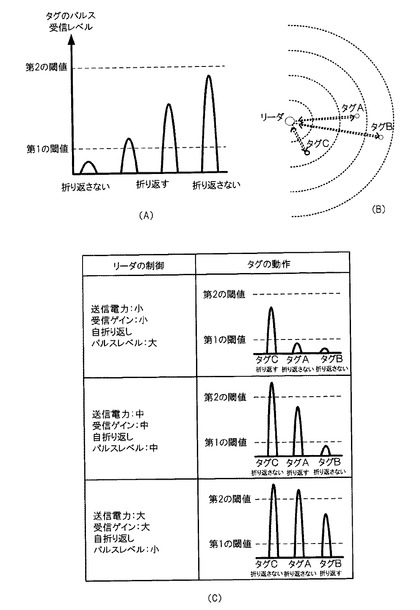
次に、上述したリーダ5及びタグ8を含む無線測距システムの動作を示す。図5は、リーダ5及びタグ8の動作を説明する説明図である。図5(A)は、タグ8により検出されるパルスの受信レベルに対して設定された第1の閾値及び第2の閾値を示すグラフである。上述した様に、タグ8の受信レベル判定部57は、予め設定された第1の閾値及び第2の閾値を保持している。タグ8は、受信レベル判定部57の判定結果に応じて、第1の閾値より受信レベルが小さいパルス、及び第2の閾値より受信レベルが大きいパルスに対し、折り返しパルスを送信しない。
【0049】
図5(B)は、リーダと、リーダから異なる距離に位置する3つのタグとの位置関係を示す説明図である。3つのタグ8を、それぞれタグA、タグB、タグCと表すとする。図5(C)は、タグ8(タグA、タグB、タグC)でのパルスの受信レベルとリーダ5での折り返しパルスの受信レベルの組合せに応じて、利得制御を適切に行い正確な測距を実現するためのリーダにおける制御パターンの一例を示す説明図を示す。
【0050】
リーダ制御部25は、受信ゲイン制御部41、自折り返しパルスレベル制御部42及び送信パワー制御部43を用いて、タグとリーダ双方でのパルスの受信レベルに応じて適切な利得制御を実現するため、それぞれ送信電力、受信ゲイン及び自折り返しパルスの送信レベルの組合せを周期的に切り替える。
【0051】
第1の組合せにおいては、リーダ制御部25は、送信電力(パワー:レベル)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する。この場合、タグAとタグBにおいては、リーダ5から送信されたパルスの受信レベルが第1の閾値より小さいため、折り返しパルスは送信されない。一方、タグCにおいては、リーダ5から送信されたパルスの受信レベルが第1の閾値より大きいため、折り返しパルスは送信される。
【0052】
この場合、リーダ5とタグCとの間の距離は近く、リーダ5におけるタグCからの折り返しパルスの受信レベルは大きいと想定されるため、自折り返しパルスのレベルも大きく設定し、受信ゲインを小さく設定する。
【0053】
第2の組合せにおいては、リーダ制御部25は、送信電力(パワー:レベル)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する。この場合、タグAにおいては、リーダ5から送信されたパルスの受信レベルが第1の閾値より大きいため、折り返しパルスは送信される。タグBにおいては、リーダ5から送信されたパルスの受信レベルが第1の閾値より小さいため、折り返しパルスは送信されない。タグCにおいては、リーダ5から送信されたパルスの受信レベルが第2の閾値より大きいため、折り返しパルスは送信されない。
【0054】
この場合、リーダ5におけるタグAからの折り返しパルスの受信レベルは中程度と想定されるため、自折り返しパルスのレベルも中程度に設定し、受信ゲインも中程度に設定する。
【0055】
第3の組合せにおいては、リーダ制御部25は、送信電力(パワー:レベル)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「大」、「大」、「小」に設定する。この場合、タグAとタグCとにおいては、リーダ5から送信されたパルスの受信レベルが第2の閾値より大きいため、折り返しパルスは送信されない。一方、タグBにおいては、リーダ5から送信されたパルスの受信レベルが第2の閾値より小さく第1の閾値より大きいため、折り返しパルスは送信される。
【0056】
この場合、リーダ5とタグBとの間の距離は遠く、リーダ5におけるタグBからの折り返しパルスの受信レベルは小さいと想定されるため、自折り返しパルスのレベルも小さく設定し、受信ゲインを大きく設定する。
【0057】
この様に、リーダ5から送信されたパルスの送信レベルに合わせて受信ゲインを設定し、設定された受信ゲインに合わせて自折り返しパルスの送信レベルが設定された組合せに切り替えられる。
【0058】
なお、本実施形態では、送信電力、受信ゲイン及び自折り返しパルスの送信レベルの組合せについて3通りの動作を周期的に切り替える場合を示したが、リーダ制御部25は、3通りに限らず、任意の数の動作を切り替えても良い。
【0059】
図6は、タグ8の起動期間及びスリープ期間を示すタイミングチャートである。タグ8は、図6の第1段に示す様に、起動している状態である起動期間と、例えば消費電力を低減するためのスリープ状態であるスリープ(Sleep)期間とを交互に繰り返す。図6の第2段〜第5段においては、タグ8として、タグA〜Dがそれぞれ非同期に上述した2つの状態を繰り返す場合が示されている。又、タグ8が起動状態にある起動期間とスリープ状態にあるスリープ期間を合わせた期間をウェイクアップ(Wake Up)周期という。
【0060】
次に、リーダ5の動作手順を、図7を参照して説明する。
【0061】
図7は、第1の実施形態のリーダ5の動作手順を示すフローチャートである。図7の各動作のうち測距部21及びリーダ制御部25により実行される各動作のプログラムは、リーダ5に内蔵されるROM(Read Only Memory)に格納され、測距部21及びリーダ制御部25をそれぞれ構成しリーダ5に内蔵されるCPU(Central Processing Unit)によって実行される。
【0062】
リーダ5のリーダ制御部25は、送信パワー制御部43、受信ゲイン制御部41及び自折り返しパルスレベル制御部42を用いて、送信電力(パワー:レベル)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する(S11)。
【0063】
リーダ5は、パルス及び自折り返しパルスを送信し、タグ8から送信された折り返しパルスを基に、リーダ5とタグ8との間の距離を測定する(S12)。ステップS12の後、リーダ5は、ウェイクアップ周期の2倍以上に予め設定された周期Nが経過したか否かを判別する(S13)。なお、リーダ5は、図3に図示していないタイマを含み、タイマからの出力に応じて、周期Nが経過したか否かを判別する。
【0064】
周期Nが経過していない場合(S13、NO)、リーダ5は、ステップS12に戻り、同様の処理を繰り返す。一方、ステップS13において周期Nが経過している場合(S13、YES)、リーダ5のリーダ制御部25は、送信パワー制御部43、受信ゲイン制御部41及び自折り返しパルスレベル制御部42を用いて、送信電力(パワー)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する(S14)。
【0065】
リーダ5は、パルス及び自折り返しパルスを送信し、タグ8から送信された折り返しパルスを基に、リーダ5とタグ8との間の距離を測定する(S15)。ステップS15の後、リーダ5は、ウェイクアップ周期の2倍以上に予め設定された周期Nが経過したか否かを判別する(S16)。
【0066】
周期Nが経過していない場合(S16、NO)、リーダ5は、ステップS15に戻り、同様の処理を繰り返す。一方、ステップS16において周期Nが経過している場合(S16、YES)、リーダ5のリーダ制御部25は、送信パワー制御部43、受信ゲイン制御部41及び自折り返しパルスレベル制御部42を用いて、送信電力(パワー)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「大」、「大」、「小」に設定する(S17)。
【0067】
リーダ5は、パルス及び自折り返しパルスを送信し、タグ8から送信された折り返しパルスを基に、リーダ5とタグ8との間の距離を測定する(S18)。ステップS18の後、リーダ5は、ウェイクアップ周期の2倍以上に予め設定された周期Nが経過したか否かを判別する(S19)。
【0068】
周期Nが経過していない場合(S19、NO)、リーダ5は、ステップS18に戻り、同様の処理を繰り返す。一方、ステップS19において周期Nが経過している場合(S19、YES)、リーダ5は、ステップS11の処理に戻る。
【0069】
次に、タグ8の動作手順を、図8を参照して説明する。
【0070】
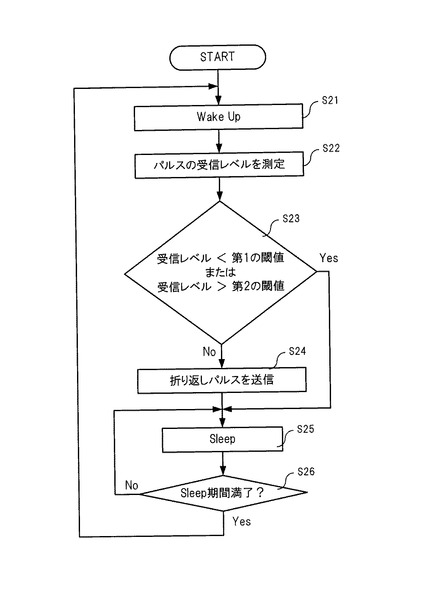
図8は、第1の実施形態のタグ8の動作手順を示すフローチャートである。図8の各動作のうち受信レベル判定部57及び折り返し制御部59により実行される動作のプログラムは、タグ8に内蔵されるROMに格納され、電源オン時にタグ8に内蔵されるCPUによって実行される。
【0071】
先ず、タグ8は、ウェイクアップ周期の起動状態(起動期間)になる(S21、図6の第1段参照)。タグ8の受信レベル判定部57は、リーダ5から送信されたパルスの受信レベルを測定する(S22)。具体的には、受信レベル判定部57は、一定の期間に複数のパルス信号を受信し、受信された複数のパルス信号を基に受信レベルを測定する。更に、タグ8の受信レベル判定部57は、パルスの受信レベルが第1の閾値より小さいか又は第2の閾値より大きいかを判定する(S23)。受信レベルが第1の閾値以上第2の閾値以下である場合に(S23、NO)、タグ8は、折り返しパルスを送信する(S24)。タグ8は、ステップS21の起動期間が終了すると、スリープ(Sleep)状態(スリープ期間)に入る(S25、図6の第1段参照)。
【0072】
一方、ステップS23において受信レベルが第1の閾値より小さい又は第2の閾値より大きい場合には(S23、YES)、タグ8は折り返しパルスを送信せず、タグ8の動作はステップS25の処理に進む。
【0073】
タグ8は、タイマ制御部67からの出力を基に、スリープ期間が満了したか否かを判別する(S26)。タグ8は、スリープ期間が満了していない場合に(S26、NO)、ステップS25の処理に戻ってスリープ状態を継続する。一方、スリープ期間が満了している場合には(S26、YES)、タグ8の動作はステップS21の処理に戻る。
【0074】
この様に、第1の実施形態の無線測距システムによれば、タグ8から送信される折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得により折り返しパルスを受信し、リーダ5とタグ8との間において正確に測距できる。
【0075】
即ち、リーダ5は、折り返しパルスを送信するタグ8を、パルスの送信レベルに応じて分けることができ、想定される折り返しパルスの受信レベルに応じてリーダ5における受信ゲインを適切に設定できる。
【0076】
例えばリーダ5とタグ8との間の距離を例に考えた場合、送信レベルが小さければ、リーダ5からの距離が近いタグ8からのみ折り返しパルスが送信されるため、距離減衰が小さいことを考慮し受信ゲインを小さく設定すればよい。
【0077】
一方、送信レベルが大きければ、リーダ5からの距離が遠いタグ8からのみ折り返しパルスが送信されるため、距離減衰が大きいことを考慮し受信ゲインを大きく設定すればよい。
【0078】
また図24に示すように、リーダ5とタグ8との間に障害物が存在する場合を考えると、送信レベルが小さければ、リーダ5との間に障害物が無いタグ8からのみ折り返しパルスが送信されるため、障害物による減衰がないことを考慮し受信ゲインを小さく設定すればよい。
【0079】
一方、送信レベルが大きければ、リーダ5との間に障害物があるタグ8からのみ折り返しパルスが送信されるため、障害物による減衰があることを考慮し受信ゲインを大きく設定すればよい。
【0080】
又、リーダ5は、折り返すタグを、タグにおけるパルスの受信レベルに応じて制限できるので、リーダ5において受信レベルの高いパルス波形(例えばリーダ5からの距離が近いタグ8による折り返しパルス)の裾に受信レベルの低いパルス(例えばリーダ5からの距離が遠いタグ8による折り返しパルス)が埋もれる様な(図25参照)、複数のタグ8からの折り返しパルスの干渉を軽減し、タグを容易に検出できる。
【0081】
同様に、図24に示す状態において、前向きの場合Fのタグ108による折り返しパルスと、後向きの場合Bのタグ108による折り返しパルスの間の干渉も回避することができる。
【0082】
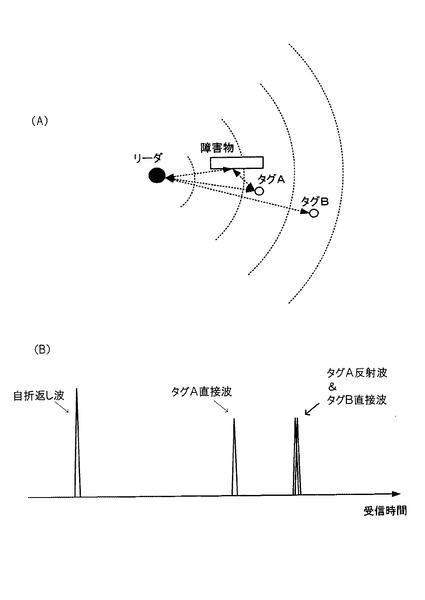
更に、リーダ5は、折り返しパルスを送信するタグ8を制限することにより、マルチパス(反射波)による干渉も低減できる。
【0083】
図9は、マルチパスによる干渉の低減を説明する説明図である。図9(A)は、障害物が存在する場合の説明図である。図9(B)は、マルチパスによる干渉が発生している様子を示す説明図である。図9(A)に示す様に、障害物が存在する場合、タグAからの折り返しパルスが障害物により反射され、リーダに到達する距離と、タグBからの折り返しパルスが直接リーダに到達する距離とがほぼ等しいとする。この場合、従来技術では、図9(B)に示す様なマルチパスによる干渉が生じる。しかしながら、本実施形態では、タグAとタグBとは、同時に折り返しパルスを送信しないため、各折り返しパルスの干渉は生じない。
【0084】
なお、本実施形態においては、自折り返しパルスを検出することにより、基準時間となるパルス送信タイミングを決定しているが、自折り返しバルスを検出しないで、パルス送信タイミングを決定しても良い。
【0085】
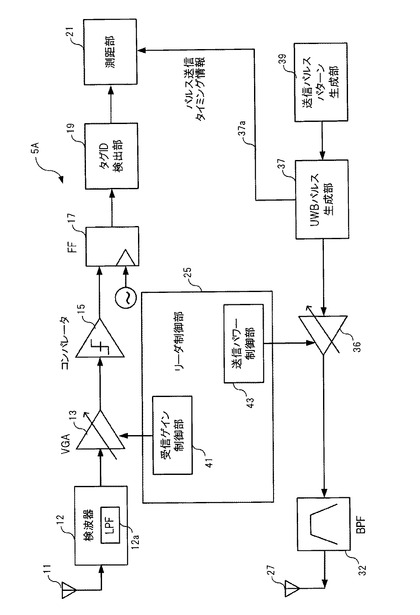
図10は、自折り返しパルスを検出しないで、パルス送信タイミングを決定する場合のリーダ5Aの構成を示すブロック図である。リーダ5Aにおいては、図3の構成と比較すると、自折り返しパルスの送信に係る部分の構成、即ち、送信アンテナ26、BPF31、VGA35、及び自折り返しパルスレベル制御部42が省かれている。又、UWBパルス生成部37から測距部21にパルス送信タイミングの信号線37aが接続されている。その他の構成は図3の構成と同じである。
【0086】
リーダ5Aにおいて、タグID検出部19は、検出されたタグIDと検出タイミングとを測距部21に出力(通知)する。測距部21は、タグID検出部19から出力された検出タイミングと、UWBパルス生成部37から信号線37aを介して取得したパルス送信タイミングとを基に、リーダ5とタグ8との間の距離を求める。この様に、図3のリーダ5の構成に比べて、自折り返しパルスを送信しないことにより、リーダ5Aの構成を簡易に実現できる。
【0087】
(第2の実施形態)
第2の実施形態の無線測距システムは、上述した第1の実施形態と同一の構成を有する部分について同一の符号を付すことにより、説明を省略し、第1の実施形態と異なる構成および動作について説明する。
【0088】
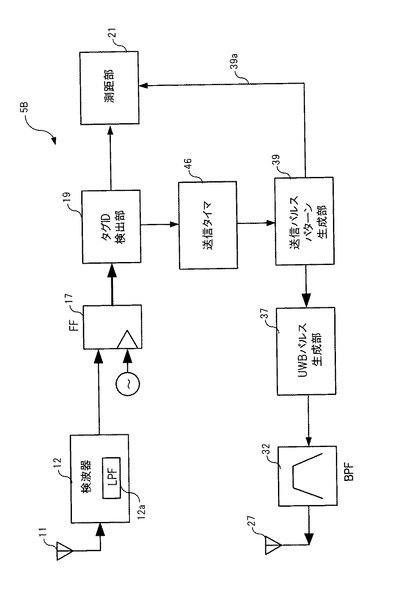
図11は、第2の実施形態におけるリーダ5Bの内部構成を示すブロック図である。リーダ5Bにおいては、図3の構成と比較すると、リーダ制御部25、VGA13、コンパレータ15、送信アンテナ26、BPF31及びVGA35,36が省かれている。又、送信パルスパターン生成部39から測距部21にパルス送信タイミングの信号線39aが接続されている。その他の構成は図3のリーダ5の構成と同じである。
【0089】
リーダ5Bは、受信アンテナ11を介して、タグ8から送信された折り返しパルスを受信し、受信された折り返しパルスを検波器12において検波し、検波信号をフリップフロップ17に出力する。フリップフロップ17は、検波部12から出力された検波信号をサンプリングし、サンプリング結果をタグID検出部19に出力する。
【0090】
タグID検出部19は、フリップフロップ17から出力されたサンプリング結果を基に、第1の実施形態と同様にタグIDを判定し、タグID及び検出タイミングを測距部21に出力(通知)する。
【0091】
測距部21は、タグID検出部19から出力された検出タイミングと、送信パルスパターン生成部39から信号線39aを介して取得したパルス送信タイミングとを基に、リーダ5Bとタグ8Bとの間の距離を求める。
【0092】
送信パルスパターン生成部39は、リーダ5Bに固有の送信パターン信号(図2(A)参照)を生成し、生成された送信パターン信号をUWBパルス生成部37に出力する。送信パルスパターン生成部39は、送信タイマ46から出力される送信中断指示を基に、パルス送信を停止可能である。
【0093】
UWBパルス生成部37は、送信パルスパターン生成部39から出力された送信パターン信号の立ち上がりに同期してUWBパルス信号を生成する。
【0094】
送信タイマ46は、タグID検出部19から出力されるフレーム異常通知を基に、又は送信タイマ46に内蔵されている自走カウンタの制御により長時間(例えば数時間)に一度の割合にて、送信中断指示を送信パルスパターン生成部39に送出する。
【0095】
図12は、第2の実施形態におけるタグ8Bの内部構成を示すブロック図である。タグ8Bは、図4のタグ8と比較すると、パルス放射テーブル部72を更に含む構成である。その他の構成は図4のタグ8の構成と同じである。
【0096】
タグ8Bは、受信アンテナ51を介して、リーダ5Bから送信されたパルスを受信する。受信されたパルスは、検波器53に入力される。検波器53は、入力されたパルスを検波し、タグID付加部56、受信レベル判定部57及びパルス放射テーブル部72にそれぞれ出力する。
【0097】
受信レベル判定部57は、検波器53から出力された検波信号から得られる受信レベルを基に、リーダ5Bから送信されるパルスの有無を判定し、判定結果を折り返し制御部59Aに出力する。
【0098】
パルス放射テーブル部72は、送信再開時間テーブル72aを保持し、検波器53から出力された検波信号の受信レベルを基に、リーダ5Bがパルスの送信を再開した後においてパルスの折り返し送信の待ち時間を決定する。パルス放射テーブル部72は、決定された送信待ち時間を折り返し制御部59Aに出力(通知)する。
【0099】
折り返し制御部59Aは、タイマ59aを有し、スリープ、トレーニング、パルス折り返しのタイミングを制御し、更に、リーダ5Bに対して折り返して送信するか否かをタグID付加部56に指示する。トレーニングとは、リーダ5Bから送信されたパルスの受信レベルを測定するが、リーダ5Bに対して折り返して送信しない動作である。
【0100】
タグID付加部56は、検波器53から出力された検波信号に対し、自タグIDを表すパルスのON/OFFを制御し、その結果、値1と値0とにより表される自タグIDの信号をUWBパルス生成部65に出力する。
【0101】
UWBパルス生成部65は、タグID付加部56から出力された信号を基に、タグID付加部56から出力された信号の立ち上がりに同期するUWBパルス信号を生成する。UWBパルス信号は、BPF62においてUWBパルス信号の帯域が制限され、送信アンテナ61から折り返しパルスとして送信される。
【0102】
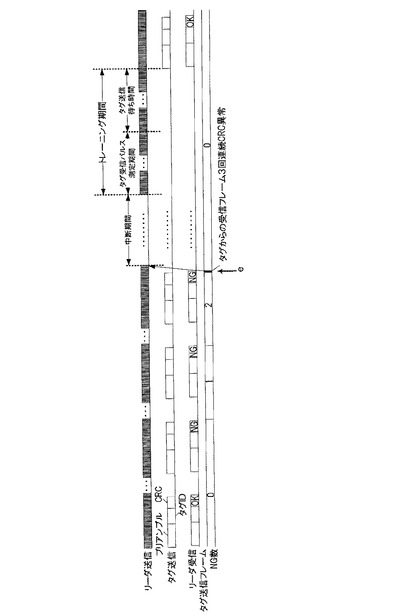
次に、上述したリーダ5B及びタグ8Bを含む無線測距システムの動作を示す。図13は、リーダ5B及びタグ8Bの送受信を示すタイミングチャートである。
【0103】
リーダ5Bは、タグ8Bから送信された折り返しパルスのフレームに誤り(例えば、プリアンプルパターン異常、タグIDに対するCRCエラー)がある状態が、一定期間継続した場合、各タグ8Bから送信された各折り返しパルスの間において干渉が発生しているとみなす。一定期間は、例えば図13のタイミングeにおいて、タグ8Bから送信された第3番目の折り返しパルスの受信タイミングである。
【0104】
図13のタイミングeにおいては、リーダ5Bは、タグ8Bを識別することが困難である。このため、リーダ5Bは、パルスの送信を一定期間(所定時間)中断し、その後、再度パルスの送信を開始する。中断する一定期間とは、例えばタグ8Bに送信するパルスのフレーム以上に相当する期間であり、より望ましくはタグ8Bのウェイクアップ周期以上である。
【0105】
タグ8Bは、リーダ5Bから送信されたパルスを受信するか否かを監視し、一定期間パルスを検出しない場合にリーダ5Bから送信されたパルスを再び検出すると、次の手順に従ってトレーニングする。
【0106】
具体的には、タグ8Bは、リーダ5Bから送信されたパルスの受信レベルを測定するが、折り返しパルスをリーダ5Bに対して返信しない。タグ8Bは、パルス放射テーブル部72に保持されている送信再開時間テーブルを基に、測定されたパルスの受信レベルに応じた送信待ち時間を決定する。
【0107】
トレーニング期間満了後、タグ8Bは、決定された送信待ち時間が経過した後、折り返しパルスをリーダ5Bに対して返信する。なお、本実施形態においては、タグ8Bは、受信されたパルスのフレームに誤りがあった場合、トレーニングするが、フレームに誤りがない場合でも、所定時間が経過する度にトレーニングしても良い。
【0108】
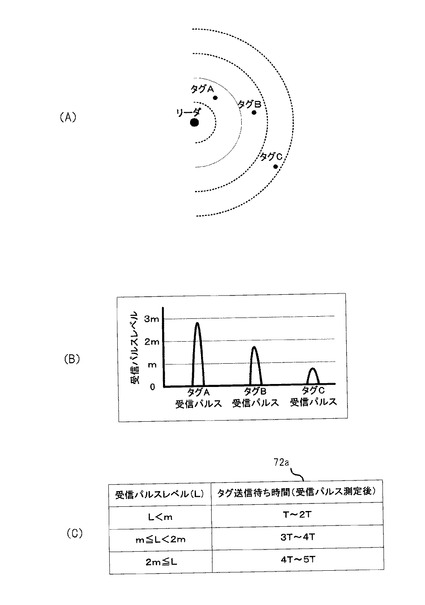
図14は、トレーニング期間において決定される送信待ち時間を説明する説明図である。図14(A)は、リーダ5Bとリーダ5Bから異なる距離に位置する3つのタグA、タグB、タグCとの位置関係を示す説明図である。図14(B)は、各タグにおいて受信されたパルスの受信レベルを示すグラフである。図14(C)は、送信再開時間テーブル72aの一例を示す説明図である。
【0109】
図14(A)に示す様に、タグ8BとしてタグA、タグB、タグCの3つに対し、リーダ5Bから送信されるパルスの受信レベルは、図14(B)に示すとおりである。即ち、図14(B)に示す様に、リーダ5Bに最も近いタグAにおいて測定される受信レベルLは、レベル2m〜3mの範囲にある。タグAより遠い位置にあるタグBにおいて測定される受信レベルLは、レベルm〜2mの範囲にある。リーダ5Bから最も遠い位置にあるタグCにおいて測定される受信レベルLは、レベルmより小さい。
【0110】
図14(C)の送信再開時間テーブル72aにおいては、送信待ち時間は、例えば受信レベルに応じて3つ設定されている。即ち、タグCにおいて測定される受信レベルLがレベルm未満では、送信待ち時間は、T〜2Tの範囲に設定される。タグBにおいて測定される受信レベルLがレベルm以上2mより小さい場合、送信待ち時間は、3T〜4Tの範囲に設定される。タグAにおいて測定される受信レベルLがレベル2m以上では、送信待ち時間は、4T〜5Tの範囲に設定される。
【0111】
この様に、リーダ5Bにおいて、受信レベルの小さいタグCから、折り返しパルスを検出するため、リーダ5Bから遠方にあるタグの検出率が向上する。又、距離の異なるタグから送信される折り返しパルスの干渉が軽減する。
【0112】
次に、リーダ5Bの動作手順を、図15を参照して説明する。
【0113】
図15は、第2の実施形態のリーダ5Bの動作手順を示すフローチャートである。図15の各動作のうち測距部21により実行される動作のプログラムは、リーダ5Bに内蔵されるROMに格納され、測距部21を構成しリーダ5Bに内蔵されるCPUによって実行される。
【0114】
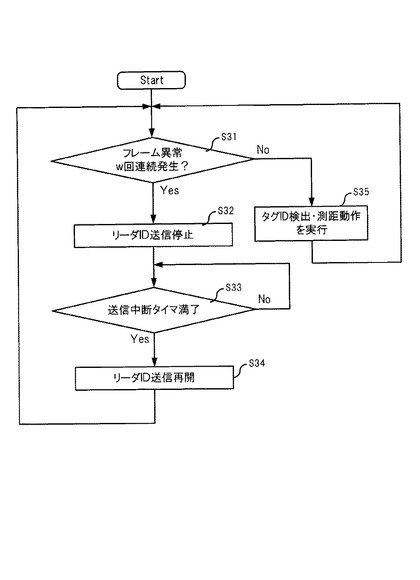
リーダ5Bの検波部12は、タグ8Bから送信された折り返しパルスのフレームに誤りがある状態が一定期間継続したか、即ちw回連続して発生したか否かを判別する(S31)。パラメータwは自然数である。
【0115】
w回連続して発生していない場合(S31、NO)、リーダ5Bは、図7と同様にタグIDを検出し、測距する(S35)。ステップS35の後、リーダ5Bの動作はステップS31の処理に戻る。なお、ステップS35においては、リーダ5Bは、第1の実施形態において説明した様な、送信電力、受信ゲイン及び自折り返しパルスレベルを含む組合せを切り替えても良いし、又は切り替えなくても良い。送信電力、受信ゲイン及び自折り返しパルスレベルを含む組合せを切り替える場合には、リーダ5Bは、図3のリーダ5のリーダ制御部25を更に含む構成となる。
【0116】
一方、ステップS31において、タグ8Bから送信された折り返しパルスのフレームに誤りがw回連続して発生している場合(S31、YES)、リーダ5Bの送信パルスパターン生成部39は、各タグ5Bから送信された各折り返しパルス間において干渉が発生しているとして、送信タイマ46から出力された送信中断指示に従ってリーダIDのパルス送信を停止する(S32)。
【0117】
リーダ5Bは、送信タイマ46(送信中断タイマ)が満了になるまで待つ(S33)。送信タイマ46が満了になると、リーダ5Bは、リーダIDのパルスの送信を再開する(S34)。次に、リーダ5Bの動作は、ステップS31の処理に戻る。
【0118】
図16は、第2の実施形態のタグ8の動作手順を示すフローチャートである。図16の各動作のうち受信レベル判定部57、折り返し制御部59A及びパルス放射テーブル部72により実行される動作のプログラムは、タグ8Bに内蔵されるROMに格納され、電源オン時にタグ8Bに内蔵されるCPUによってスリープ中も実行される。
【0119】
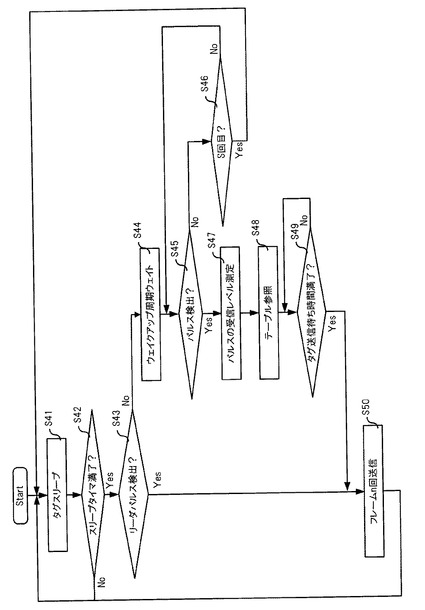
先ず、タグ8Bは、スリープ状態(スリープ期間)に入り(S41)、その後、スリーブ期間が満了するまで待つ(S42)。
【0120】
スリープ期間が満了すると(S42、YES)、タグ8Bの検波器53は、リーダ5Bから送信されたパルスを検出したか否かを判別する(S43)。パルスを検出した場合(S43、YES)、タグ8Bは、n(例えばn=3)回の折り返し送信パルスをリーダ5Bに返信する(S50)。ステップS50の後、タグ8Bは、ステップS41の処理、即ちスリープ状態(スリープ期間)に戻る。
【0121】
一方、ステップS43においてパルスを検出しない場合(S43、NO)、タグ8Bは、リーダ5Bのパルス送信の中断期間として例えばウェイクアップ周期が経過するのを待ち(S44)、パルスを検出したか否かを判別する(S45)。パルスが検出されない場合(S45、NO)、タグ8Bは、S(例えばS=4)回目であるか否かを判別する(S46)。S回目でない場合(S46、NO)、タグ8Bの動作はステップS45の処理に戻る。S回目である場合(S46、YES)、タグ8Bの動作はステップS41の処理に戻る。
【0122】
又、一方、ステップS45においてリーダ5Bから送信されたパルスが検出された場合(S45、YES)、タグ8Bの受信レベル判定部57は、パルスの受信レベルを測定する(S47)。タグ8Bのパルス放射テーブル部72は、検波器53から出力された検波信号を基に、送信再開時間テーブル72aを参照して送信待ち時間を決定する(S48)。
【0123】
タグ8Bの折り返し制御部59Aは、タイマ59aからの出力を基に、ステップS48において決定された送信待ち時間が満了するまで待つ(S49)。送信待ち時間が満了すると(S49、YES)、タグ8Bの動作は、ステップS50の処理に進む。
【0124】
この様に、第2の実施形態の無線測距システムによれば、リーダ5Bは、タグ8Bから送信された折り返しパルスに応じて、タグ8Bに対するパルス送信を中断及び再開できる。又、タグ8Bは、リーダ5Bからのパルス送信の中断及び再開を検出でき、復調処理することなく、折り返しパルスの返信タイミングを制御できる。
【0125】
又、第2の実施形態の無線測距システムによれば、受信レベルの小さい、つまり、遠方にあるタグから、折り返しパルスが検出されるので、遠方にあるタグの検出率が向上し、距離の異なるタグからのパルスの干渉を軽減できる。
【0126】
(第3の実施形態)
第3の実施形態の無線測距システムは、上述した第1及び第2の実施形態と同一の構成を有する部分について同一の符号を付すことにより、説明を省略し、第1及び第2の実施形態と異なる構成および動作について説明する。
【0127】
図17は、第3の実施形態におけるリーダ5Cの内部構成を示すブロック図である。リーダ5Cにおいては、送信パルスパターン生成部39Aは、送信タイマ46からの指示を基に、送信パルス間隔を変更する。例えば、第3の実施形態において、送信パルス間隔は、T、2T、4T、8Tのうちいずれかに設定される。
【0128】
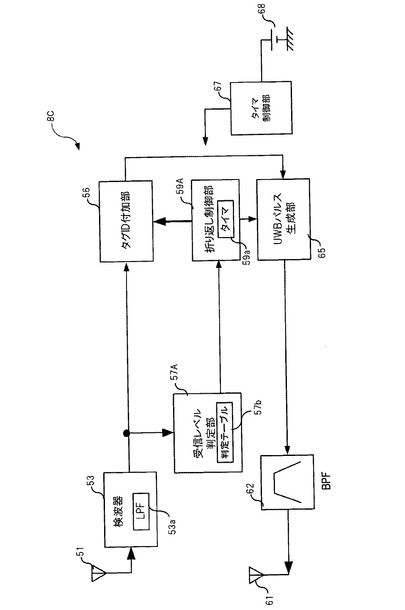
図18は、第3の実施形態におけるタグ8Cの内部構成を示すブロック図である。タグ8Cにおいては、図12のタグ8Bと比べ、パルス放射テーブル部72が省かれている。受信レベル判定部57Aは、検波器53から出力された検波信号から得られる受信レベル及び受信パルス間隔を基に、判定テーブル57bを参照し、折り返しパルスを送信するか否かを判定する。
【0129】
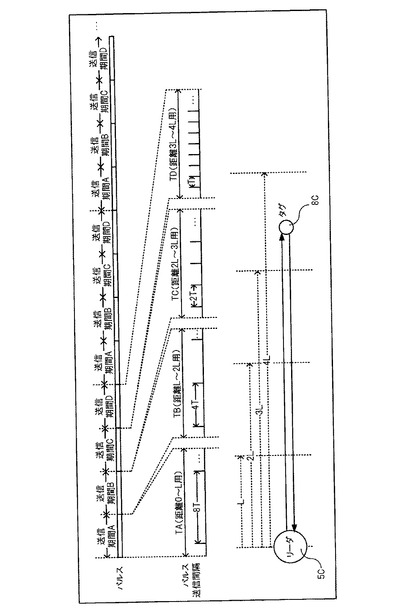
図19は、送信パルスのパルスパターンを示すタイミングチャートである。リーダ5Cとタグ8Cとの間の距離が距離0〜Lである場合、リーダ5Cは、パルス間隔8Tによってパルスを送信する。リーダ5Cとタグ8Cとの間の距離が距離L〜2Lである場合、リーダ5Cは、パルス間隔4Tによってパルスを送信する。リーダ5Cとタグ8Cとの間の距離が距離2L〜3Lである場合、リーダ5Cは、パルス間隔2Tによってパルスを送信する。リーダ5Cとタグ8Cとの間の距離が距離3L〜4Lである場合、リーダ5Cは、パルス間隔Tによってパルスを送信する。
【0130】
図20は、パルス受信レベル及びパルス受信間隔を基に折り返しパルスを返信するか否かの判定を示す説明図である。図20(A)は、タグ8Cがリーダ5Cからパルスを受信した場合に、自タグ8Cが折り返しパルスを送信するか否かを判定するための判定テーブル57bを示す。判定テーブル57bには、パルスの受信間隔と受信レベルを基に、自タグ8Cが折り返しパルスを送信する機会が示されている。なお、パルスの受信レベルは、例えば、予めトレーニングによりタグ8Cにおいて既知であるとする。
【0131】
図20(A)の判定テーブル57bにおいて、○印は、自タグ8Cが折り返しパルスを送信する機会であることを示す。同様に、×印は、自タグ8Cが折り返しパルスを送信する機会ではないことを示す。
【0132】
具体的に、受信間隔がTであり、かつ受信レベルがP/16〜P/8である場合には、自タグ8Cが折り返しパルスを送信する機会である。又、受信間隔が2Tであり、受信レベルがP/8〜P/4である場合、自タグ8Cが折り返しパルスを送信する機会である。又、受信間隔が4Tであり、受信レベルがP/4〜P/2である場合、自タグ8Cが折り返しパルスを送信する機会である。又、受信間隔が8Tであり、受信レベルがP/2〜Pである場合、自タグ8Cが折り返しパルスを送信する機会である。
【0133】
図20(B)は、パルス受信間隔とパルスの受信レベル(電力)との関係の一例を示す説明図である。図20(B)には、パルス受信間隔がTであり、受信レベルがP/16〜P/8である場合に、自タグ8Cが折り返しパルスを送信する機会である送信パルスが示されている。
【0134】
図21は、第3の実施形態のリーダ5Cの動作手順を示すフローチャートである。図21の各動作のうち測距部21により実行される動作のプログラムは、リーダ5Cに内蔵されるROMに格納され、測距部21を構成しリーダ5Cに内蔵されるCPUによって実行される。
【0135】
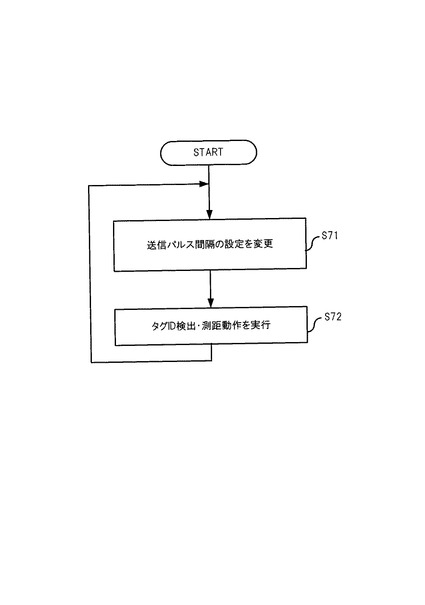
先ず、リーダ5Cは、パルスの送信間隔の設定を変更する(S71)。パルスの送信間隔の設定の変更においては、送信パルス間隔がTである場合、2倍の2Tに変更される。又、送信パルス間隔が2Tである場合、2倍の4Tに変更される。同様に、送信パルス間隔が4Tである場合、2倍の8Tに変更される。さらに、送信パルス間隔が8Tである場合、Tに変更される。以後、送信パルス間隔は、循環的に変更される。
【0136】
リーダ5Cは、変更されたパルスの送信間隔を用いてパルスを送信し、図7と同様にタグIDの検出及びリーダ5Cとタグ8Cとの間の距離を測定する(S72)。ステップS72の後、リーダ5Cの動作はステップS71の処理に戻る。なお、ステップS72においては、リーダ5Cは、第1の実施形態において説明した様な、送信電力、受信ゲイン及び自折り返しパルスレベルを含む組合せを切り替えても良いし、又は切り替えなくても良い。送信電力、受信ゲイン及び自折り返しパルスレベルを含む組合せを切り替える場合には、リーダ5Cは、図3のリーダ5のリーダ制御部25を更に含む構成となる。
【0137】
図22は、第3の実施形態のタグ8Cの動作手順を示すフローチャートである。図22の各動作のうち受信レベル判定部57A及び折り返し制御部59Aにより実行される動作のプログラムは、タグ8Cに内蔵されるROMに格納され、電源オン時にタグ8Cに内蔵されるCPUによってスリープ中も実行される。
【0138】
先ず、タグ8Cは、スリープ状態(スリープ期間)に入り(S81)、その後、スリープ期間が満了するまで待つ(S82)。
【0139】
スリープ期間が満了すると(S82、YES)、タグ8Cの検波器53は、リーダ5Cから送信されたパルスを検出したか否かを判別する(S83)。パルスを検出していない場合(S83、NO)、タグ8Cの動作はステップS81の処理に戻る。
【0140】
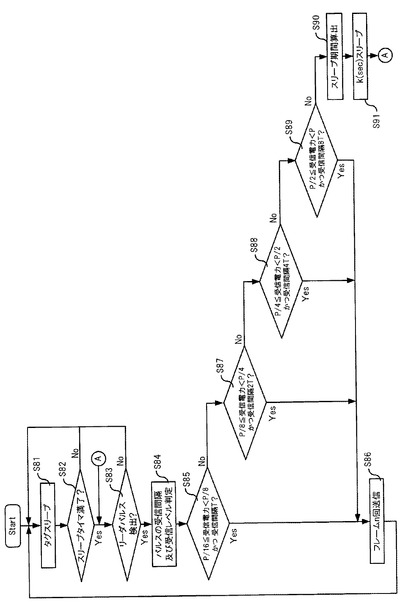
一方、ステップS83においてリーダ5Cから送信されたパルスを検出した場合(S83、YES)、タグ8Cの受信レベル判定部57Aは、リーダ5Cから送信されたパルスの受信間隔及び受信レベルを判定する(S84)。タグ8Cの受信レベル判定部57Aは、ステップS84において判定されたパルスの受信間隔及び受信レベルを基に、条件1が満たされるか否か、即ち、送信パルスの受信レベルがP/16以上であってP/8未満であり、かつ、受信間隔がTであるか否かを判別する(S85)。
【0141】
条件1が満たされた場合(S85、YES)、タグ8Cは、スリープ状態(スリープ期間)から起動(ウェイクアップ)し、n(例えばn=3)回の折り返し送信パルスをリーダ5Cに返信する(S86)。ステップS86の後、タグ8Cの動作はステップS81の処理に戻る。
【0142】
一方、ステップS85において条件1が満たされない場合(S85、NO)、タグ8Cの受信レベル判定部57Aは、条件2が満たされるか否か、即ち、送信パルスの受信レベルがP/8以上であってP/4未満であり、かつ、受信間隔が2Tであるか否かを判別する(S87)。条件2が満たされる場合(S87、YES)、タグ8Cの動作はステップS86の処理に進む。
【0143】
一方、ステップS87において条件2が満たされない場合(S87、NO)、タグ8Cの受信レベル判定部57Aは、条件3が満たされるか否か、即ち、送信パルスの受信レベルがP/4以上であってP/2未満であり、かつ、受信間隔が4Tであるか否かを判別する(S88)。条件3が満たされる場合(S88、YES)、タグ8Cの動作はステップS86の処理に進む。
【0144】
一方、ステップS88において条件3が満たされない場合(S88、NO)、タグ8Cの受信レベル判定部57Aは、条件4が満たされるか否か、即ち、送信パルスの受信レベルがP/2以上であってP未満であり、かつ、受信間隔が8Tであるか否かを判別する(S89)。条件4が満たされる場合(S89、YES)、タグ8Cの動作はステップS86の処理に進む。
【0145】
一方、ステップS89において条件4が満たされない場合(S89、NO)、タグ8Cの折り返し制御部59Aは、受信レベル判定部57Aからの出力、即ち、リーダ5Cからのパルスの受信間隔及び受信レベルを基に、タグ8Cのスリープ期間kを算出する(S90)。ステップS90において、タグ8Cのスリープ期間kは、折り返し制御部59Aにより数式(1)に従って算出される。
【0146】
【数1】

【0147】
スリープ期間kの算出について具体的に説明する。例えば、ステップS84において判定されたパルスの受信間隔が8Tであって、受信レベルがP/16〜P/8である場合におけるスリープ期間kを算出する例を説明する。
【0148】
タグ8Cの折り返し制御部59Aは、ステップS84において受信レベル判定部57Aにより判定されたパルスの受信間隔を基に、数式(1)の現在の送信期間が図19における送信期間A、B、C、Dのうちいずれであるかを把握する。例えば、リーダ5Cから送信されるパルスの送信期間(送信間隔)が受信間隔8T(図19参照)である場合、折り返し制御部59Aは、数式(1)における現在の送信期間を送信期間Aであると判定する。
【0149】
更に、折り返し制御部59Aは、ステップS84において判定された受信レベル及び判定テーブル57bを基に、数式(1)におけるウェイクアップ時から自送信機会までの時間を算出する。例えば、リーダ5Cから送信されるパルスの受信レベルがP/16〜P/8である場合、折り返し制御部59Aは、現在の送信期間(送信期間A)から次の自送信機会(送信期間D)までの時間を、図19における時間TA+TB+TCと判定する。
【0150】
ここで、上述した具体例において、受信レベルがP/16〜P/8の場合にタグ8Cの次の自送信機会が送信期間Dとなるのは、次の理由による。即ち、受信レベルP/16〜P/8であってパルスの受信間隔が受信間隔Tとなる場合に、タグ8Cが折り返しパルスを送信する機会であることが図20(A)の判定テーブル57bにおいて定められているためである(図20(A)の判定テーブル57bの○印参照)。
【0151】
但し、タグ8Cのウェイクアップ時の送信期間Aにおける詳細な時間は定かでないため、スリープ期間kの算出においては、スリープ期間kが送信期間Dを超過しないために、(現在の送信期間/2)が減算されている(数式(1)参照)。
【0152】
従って、折り返し制御部59Aは、ステップS84において判定されたパルスの受信間隔が8Tであってパルスの受信レベルがP/16〜P/8である場合には、数式(1)に従って、スリープ期間kを、k=(TA+TB+TC)−TA/2と算出する。
【0153】
折り返し制御部59Aは、タグ8CがステップS90において算出されたスリープ期間kの間スリープする旨を、図18に不図示の電源制御部に指示する。これにより、タグ8Cは、ステップS90において算出されたスリープ期間kの間スリープする(S91)。上述した具体例においては、タグ8Cは、次の送信期間Dとなるまでスリープする。k秒間のスリープ期間が満了すると(S82、YES)、タグ8Cの動作はステップS83に進み、以降は同様の動作が繰り返される。
【0154】
この様に、第3の実施形態の無線測距システムによれば、リーダ5Cとタグ8Cとの間の距離に応じて、タグからの折り返しパルスの送信を制御できる。又、第3の実施形態においては、リーダ5Cからタグ8Cが遠いほど、受信パルス数が増えるので、リーダ5Cにおける相関利得を上げることができ、遠方にあるタグ8Cの検出率を高めることができる。更に、本実施形態の無線距離システムによれば、距離が異なる各タグ8Cから同時に各折り返しパルスを受信することがないため、マルチパスによる干渉を低減できる。
【0155】
以上、図面を参照しながら各種の実施形態について説明したが、本発明はかかる例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例又、は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0156】
なお、第2の実施形態のリーダ5B(図11参照)は、無線端末(タグ5B)にパルス信号を送信する無線測距装置であって、無線端末(タグ5B)から送信された折り返しパルス信号を検波する検波部12と、検波部12により出力された検波信号を基に、無線端末(タグ8B)の識別情報を検出するタグID検出部19と、タグID検出部19が無線端末(タグ8B)の識別情報を検出しない場合、パルス信号の送信を中断する送信パルスパターン生成部39と、を備える。また、送信パルスパターン生成部39は、パルス信号の送信を所定時間中断した後、パルス信号の送信を再開する。
【0157】
なお、第3の実施形態のリーダ5C(図17参照)は、無線端末(タグ5C)にパルス信号を送信する無線測距装置であって、無線端末(タグ5C)から送信された折り返しパルス信号を検波する検波部12と、検波部12により出力された検波信号を基に、無線端末(タグ8C)の識別情報を検出するタグID検出部19と、タグID検出部19が無線端末(タグ8C)の識別情報を検出しない場合、パルス信号の送信を中断する送信パルスパターン生成部39と、を備える。また、送信パルスパターン生成部39は、パルス信号の送信間隔を、例えば複数の異なる所定の送信期間の中から周期的に切り替える。
【産業上の利用可能性】
【0158】
本発明は、無線測距装置および無線端末間の距離を測定する場合、無線測距装置が適切な利得によって折り返しパルスを受信し、正確に測距でき、有用である。
【符号の説明】
【0159】
5、5A、5B、5C リーダ
8、8B、8C タグ
11 受信アンテナ
12 検波器
13、35、36 可変利得増幅器
15 コンパレータ
17 フリップフロップ
19 タグID検出部
21 測距部
25 リーダ制御部
26、27 送信アンテナ
37 UWBパルス生成部
37a、39a 信号線
39、39A 送信パルスパターン生成部
41 受信ゲイン制御部
42 自折り返しパルスレベル制御部
43 送信パワー制御部
46 送信タイマ
51 受信アンテナ
53 検波器
56 タグID付加部
57、57A 受信レベル判定部
59、59A 折り返し制御部
61 送信アンテナ
67 タイマ制御部
【技術分野】
【0001】
本発明は、パルス信号を送信して距離を測定する無線測距装置、無線端末及び無線測距システムに関する。
【背景技術】
【0002】
従来、無線測距システムでは、無線基地局装置であるリーダが無線端末装置であるタグに対してパルス信号を無線によって送信し、タグはパルス信号を受信した後にリーダへ折り返しパルス信号を送信する。リーダは、タグからの折り返しパルス信号を受信するまでの往復時間を基に、タグまでの距離を測定する。
【0003】
この様な無線測距システムにおいて、例えば、UWB(Ultra Wide Band)通信方式は、パルス幅が1ナノ秒以下という短パルス信号を用いるため、マルチパス伝播環境においても高精度な測距を実現できる。
【0004】
この種の先行技術として、多数存在するタグを1つずつ検出するシステムが知られている(例えば特許文献1参照)。このシステムでは、呼掛け機(リーダ)は、先ず送信する信号のレベルを小さく設定し、Pm1の範囲において各トランスポンダ(タグ:14.1〜14.3)を測定する。各トランスポンダ14.1〜14.3の検出はシーケンシャルに実施される。その後、呼掛け機は、各トランスポンダからの信号の受信に応じて受信確認信号を各トランスポンダに送信し、各トランスポンダ14.1〜14.3をスリープモードに遷移させ、信号の反射を停止させる。次に、呼掛け機は、送信する信号のレベルを上げ、Pm2の範囲において各トランスポンダ(14.4〜14.8)を測定する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平11−344562号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上述従来の無線測距システムにおいては、次の様な課題があり、課題の改善が要望された。
【0007】
図23は、リーダからの距離に応じて変化する折り返しパルス信号の受信レベルを示す説明図である。図23に示す様に、リーダ−タグ間の距離に応じて、リーダにおいて受信される折り返しパルス信号の受信レベルが大きく異なる。図23においては、自折り返しパルス信号を受信した時間t0から、タグからの折り返しパルス信号を受信するまでの時間t1、t2、t3が示されている。
【0008】
距離1mのタグからの折り返しパルス信号を受信するまでの時間(受信時間)t1における折り返しパルス信号の受信レベルが最も大きい。距離5mのタグからの折り返しパルス信号を受信するまでの受信時間t2、距離10mのタグからの折り返しパルス信号を受信するまでの受信時間t3と距離が長くなるにつれて、タグからの折り返しパルス信号の受信レベルは小さくなっている。
【0009】
図24は、タグの遮蔽による折り返しパルス信号の受信レベルの変化を示す説明図である。図24(A)は、リーダとタグとの間に遮蔽物(例えば、人体)が存在する場合の説明図である。図24(B)は、人物がリーダに対して前向きである場合と後向きである場合における各折り返しパルス信号の受信レベルを示す説明図である。
【0010】
図24(A)に示す様に、リーダとタグとの間に遮蔽物(例えば、人体)が存在する場合がある。例えば、リーダ105に対し、タグ108を胸ポケットに入れて所持する人物120を想定する。人物120がリーダ105に対して前向きFである場合、リーダ105とタグ108の間に人体である遮蔽物は存在せず、図24(B)に示す様に、折り返しパルス信号の受信レベルFは大きい。一方、人物120がリーダ105に対して後向きBである場合、リーダ105とタグ108との間に人体である遮蔽物が存在し、折り返しパルス信号の受信レベルBは小さい。この様に、リーダ−タグ間の距離とは無関係に、リーダにおいて受信される折り返しパルス信号の受信レベルが小さくなる場合もある。
【0011】
図25は、リーダにおいて受信される折り返しパルス信号の波形を示すグラフである。図25に示す様に、リーダにおいて受信される折り返しパルス信号の波形は、例えば、フィルタの影響により裾の部分に広がりを持つ。このため、受信レベルの大きな折り返しパルス信号aの裾に、受信レベルの小さな折り返しパルス信号bが埋もれてしまい、受信レベルの小さな折り返しパルス信号bの検出が困難となる。
【0012】
以上のように、リーダにおいて受信される折り返しパルス信号の受信レベルは大きく変化するため、リーダは広いダイナミックレンジを持つ必要がある。
【0013】
上述のような課題を解決するために、リーダは、折り返しパルス信号の受信レベルに応じて、適切に受信利得を調整しなければならない。しかし、UWBの様な短パルス信号を用いた場合、単一パルスを用いて受信信号強度であるRSSI(Received Signal Strength Indicator)を生成することは困難である。即ち、短パルス信号を用いない通常の無線機に使用される自動利得制御(AGC:Automatic Gain Control)の実現は困難となる。又、数ナノ秒という短い区間において、折り返しパルス信号毎に可変利得アンプ(VGA:Variable Gain Amp.)の利得を切り替えることは難しい。
【0014】
又、特許文献1では、リーダの受信利得制御については記述されておらず、上述AGCの課題を解決することは困難である。又、範囲内のタグの検出はシーケンシャルに実施されるので、測定に時間がかかる。更に、受信確認信号を検出するために、復調処理を必要とすることは、タグの安価及び省電力の実現を難しくさせる。
【0015】
そこで、本発明は、上述した従来の事情に鑑みてなされたもので、折り返しパルス信号の受信レベルが高速に大きく変動する環境においても、適切な利得によって折り返しパルス信号を受信し、正確に測距する無線測距装置、無線端末及び無線測距システムを提供することを目的とする。
【課題を解決するための手段】
【0016】
本発明は、上述した無線測距装置であって、無線端末にパルス信号を送信する無線測距装置であって、前記無線端末から送信された折り返しパルス信号を検波する検波部と、前記検波部から出力された検波信号を増幅する増幅部と、前記送信されるパルス信号の送信レベルを可変する送信レベル制御部と、前記検波信号を増幅するための利得を可変する受信ゲイン制御部と、前記送信されるパルス信号の送信レベル及び前記利得の大きさの組合せを周期的に切り替えるリーダ制御部と、前記増幅されたパルス信号を基に、前記無線端末の識別情報を検出するタグID検出部と、前記パルス信号の送信タイミングから、前記タグID検出部によって前記識別情報が検出されたパルス信号の受信タイミングまでの時間差を基に、前記無線端末との距離を測距する測距部と、を備える。
【0017】
又、本発明は、上述した無線端末であって、無線測距装置から送信されたパルス信号を受信する無線端末であって、前記受信された前記パルス信号を検波する検波部と、前記検波部から出力された検波信号のレベルを判定する受信レベル判定部と、前記検波信号のレベルが所定の範囲にある場合、前記無線測距装置から送信された前記パルス信号に対する折り返しパルス信号の送信を制御する折り返し制御部と、を備える。
【0018】
又、本発明は、上述した無線測距システムであって、無線端末にパルス信号を送信する無線測距装置と、前記無線測距装置から送信されたパルス信号を受信する無線端末とを含む無線測距システムであって、前記無線測距装置は、前記無線端末から送信された折り返しパルス信号を検波する第1検波部と、前記第1検波部から出力された検波信号を増幅する増幅部と、前記送信されるパルス信号の送信レベルを可変する送信レベル制御部と、前記検波信号を増幅するための利得を可変する受信ゲイン制御部と、前記送信されるパルス信号の送信レベル及び前記利得の大きさの組合せを周期的に切り替えるリーダ制御部と、前記増幅されたパルス信号を基に、前記無線端末の識別情報を検出するタグID検出部と、前記パルス信号の送信タイミングから、前記タグID検出部によって識別情報が検出されたパルス信号の受信タイミングまでの時間差を基に、前記無線端末との距離を測距する測距部と、を備え、前記無線端末は、前記受信された前記パルス信号を検波する第2検波部と、前記第2検波部から出力された検波信号のレベルを判定する受信レベル判定部と、前記検波信号のレベルが所定の範囲にある場合、前記無線測距装置から送信された前記パルス信号に対する折り返しパルス信号の送信を制御する折り返し制御部と、を備える。
【発明の効果】
【0019】
本発明によれば、送信パルスの送信レベルと受信利得の組合せを切り替えるので、折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得により折り返しパルスを受信し、正確に測距できる。
【図面の簡単な説明】
【0020】
【図1】第1の実施形態の無線測距システムにおける測距方法を説明する説明図、(A)リーダから送信されるパルス、リーダにおいて受信される自折り返しパルス、及びタグから送信される折り返しパルスを説明する説明図、(B)リーダとタグとの間の距離の測定を説明する説明図
【図2】リーダとタグとの間において送受信されるパルスのフレームフォーマットの一例を示す説明図、(A)リーダから周期的に送信されるパルスのフレームフォーマット、(B)タグから送信される折り返しパルスのフレームフォーマット
【図3】第1の実施形態におけるリーダの内部構成を示すブロック図
【図4】第1の実施形態におけるタグの内部構成を示すブロック図
【図5】リーダ及びタグの動作を説明する説明図、(A)タグにより検出されるパルスの受信レベルに対して設定された第1の閾値及び第2の閾値を示すグラフ、(B)リーダと、リーダから異なる距離に位置する3つのタグとの位置関係を示す説明図、(C)タグでのパルスの受信レベルの組合せに応じて、利得制御を適切に行い正確な測距を実現するためのリーダにおける制御パターンの一例を示す説明図
【図6】タグの起動期間及びスリープ期間を示すタイミングチャート
【図7】第1の実施形態のリーダの動作手順を示すフローチャート
【図8】第1の実施形態のタグの動作手順を示すフローチャート
【図9】マルチパスによる干渉の低減を説明する説明図、(A)障害物が存在する場合の説明図、(B)マルチパスによる干渉が発生している様子を示す説明図
【図10】自折り返しバルスを検出しないで、パルス送信タイミングを決定する場合のリーダの構成を示す図
【図11】第2の実施形態におけるリーダの内部構成を示すブロック図
【図12】第2の実施形態におけるタグの内部構成を示すブロック図
【図13】リーダ及びタグの送受信を示すタイミングチャート
【図14】トレーニング期間において決定される送信待ち時間を説明する説明図、(A)リーダとリーダから異なる距離に位置する3つのタグとの位置関係を示す説明図、(B)各タグにおいて受信されたパルスの受信レベルを示すグラフ、(C)送信再開時間テーブルの一例を示す説明図
【図15】第2の実施形態のリーダの動作手順を示すフローチャート
【図16】第2の実施形態のタグの動作手順を示すフローチャート
【図17】第3の実施形態におけるリーダの内部構成を示すブロック図
【図18】第3の実施形態におけるタグの内部構成を示すブロック図
【図19】送信パルスのパルスパターンを示すタイミングチャート
【図20】パルス受信レベル及びパルス受信間隔を基に折り返しパルスを返信するか否かの判定を示す説明図、(A)判定テーブルの一例を示す説明図、(B)パルス受信間隔とパルスの受信レベル(電力)との関係の一例を示す説明図
【図21】第3の実施形態のリーダの動作手順を示すフローチャート
【図22】第3の実施形態のタグの動作手順を示すフローチャート
【図23】リーダからの距離に応じて変化する折り返しパルス信号の受信レベルを示す説明図
【図24】タグの遮蔽によるパルスの受信レベルの変化を示す説明図、(A)リーダとタグとの間に遮蔽物(例えば、人体)が存在する場合の説明図、(B)人物がリーダに対して前向きである場合と後向きである場合における各折り返しパルス信号の受信レベルを示す説明図
【図25】リーダにおいて受信される折り返しパルス信号の波形を示すグラフ
【発明を実施するための形態】
【0021】
以下、本発明に係る無線測距装置、無線端末及び無線測距システムの実施形態について、図面を参照して説明する。
【0022】
(第1の実施形態)
本発明に係る無線測距システムは、無線測距装置である無線基地局(以下、「リーダ」という)、及び無線端末である携帯端末装置(以下、「タグ」という)を含む構成である。
【0023】
図1は、第1の実施形態の無線測距システムにおける測距方法を説明する説明図である。図1(A)は、リーダから送信されるパルス7a、リーダにおいて受信される自折り返しパルス7b、及びタグから送信される折り返しパルス7cを説明する説明図である。図1(B)は、リーダとタグとの間の距離の測定を説明する説明図である。
【0024】
図1(A)に示す様に、リーダ5は、リーダIDを表すパルス信号(以下、単にパルスともいう)7aをタグ8に送信する。この場合、送信されたパルスは、自装置(リーダ5)において自折り返しパルス7bとして受信される。一方、タグ8は、周期的に起き上がり(スリープ状態から起動状態になり)、リーダ5から送信されたパルスを受信して分析した後、リーダ5に折り返しパルス7cを返信する。リーダ5は、図1(B)に示す様に、自折り返しパルス7bを受信してから、折り返しパルス7cを受信するまでの時間差を計測し、測定した時間差を基に、リーダ5からタグ8までの距離を測定する。
【0025】
図2は、リーダ5とタグ8との間において送受信されるパルスのフレームフォーマットの一例を示す説明図である。図2(A)に示す様に、リーダ5から周期的に送信されるパルスのフレームフォーマットは、リーダIDを表し、パルス間隔Tごとに値1(パルス送信あり)と値0(パルス送信なし)とにより表される。本実施形態においては、パルス幅1nsのパルスがパルス間隔100nsの周期により送信される。なお、本発明は上述のパルス幅およびパルス間隔に限定されるものではない。
【0026】
又、図2(B)に示す様に、タグから送信される折り返しパルスのフレームフォーマットは、プリアンプル及びタグIDを含む構成であり、リーダ5の送信パルスと同様、値1と値0とにより表される。リーダ5から送信されたパルスに対し、タグ8から送信された折り返しパルスは、非同期にて返信される。なお、本発明は図2に示すフレームフォーマットに限定されるものではない。
【0027】
図3は、第1の実施形態におけるリーダ5の内部構成を示すブロック図である。リーダ5は、図3に示す様に、受信アンテナ11、検波器12、可変利得増幅器(VGA)13、コンパレータ15、フリップフロップ(FF)17、タグID検出部19、測距部21、リーダ制御部25、第1送信アンテナ26、第2送信アンテナ27、バンドパスフィルタ(BPF)31,32、VGA35,36、UWBパルス生成部37及び送信パルスパターン生成部39を含む構成である。
【0028】
受信アンテナ11は、タグ8から送信された折り返しパルス、及びリーダ5から送信されたパルスの自折り返しパルスを受信する。受信された折り返しパルス又は自折り返しパルスは検波器12に入力される。
【0029】
検波部としての検波器12は、ローパスフィルタ(LPF)12aを有し、受信アンテナ11において受信されたパルスを検波し、検波信号をVGA13に出力する。なお、図3において、ローパスフィルタ12aは、検波器12に含まれる構成であるが、検波器12からの出力を入力可能に検波器12とは別に構成されても良い。なお、ローパスフィルタが検波部に含まれている構成が検波部とは別に構成されても良いことは、後述の各実施形態においても同様である。
【0030】
増幅部としての可変利得増幅器(VGA)13は、折り返しパルス及び自折り返しパルスを検出するために後述する受信ゲイン制御部41によって調整されたゲインによって、検波器12から出力された検波信号を増幅して出力する。
【0031】
コンパレータ15は、VGA13から出力された信号を2値信号に変換する。
【0032】
フリップフロップ(FF)17は、コンパレータ15により変換された2値信号をサンプリングする。なお、フリップフロップ17には、リーダ5に内蔵される基準信号発振器からのリファレンス信号が供給されている。フリップフロップ17は、リファレンス信号を所定倍に逓倍した信号に基づいて、コンパレータ15から出力された2値信号をサンプリングする。フリップフロップ17に供給されているリファレンス信号については後述の各実施形態においても同様である。
【0033】
タグID検出部19は、フリップフロップ17のサンプリングによって出力された2値信号を基に、タグ8の識別情報であるタグIDを判定する。更に、タグID検出部19は、タグIDが検出された折り返しパルスの受信タイミングを測距部21に出力する。タグID検出部19は、例えば、複数の受信タイミングで受信されるパルス信号のそれぞれについて、既知であるプリアンブルパターンの検出処理を行い、プリアンブルパターンの検出を契機に引き続き受信されるタグIDの検出を行う。
【0034】
測距部21は、タグID検出部19から出力された受信タイミングと自折り返しパルスの送信タイミングとの時間差を基に、タグIDが検出されたタグ8とリーダ5との距離を測定する。
【0035】
リーダ制御部25について説明する。
【0036】
リーダ制御部25は、受信ゲイン制御部41、自折り返しパルスレベル制御部42及び送信レベル制御部としての送信パワー制御部43を含む構成である。本実施形態においては、リーダ制御部25は、折り返しパルスの受信レベルが大きく異なるタグを区別して検出するために、送信電力、受信ゲイン及び自折り返しパルスの送信レベルを制御する。受信ゲインは、検波器12から出力された検波信号を増幅するために用いられるゲインである。なお、リーダ制御部25の各部の動作については後述する。
【0037】
送信パルスパターン生成部39は、リーダ5に固有の送信パターン信号(図2(A)参照)を生成し、生成された送信パターン信号をUWBパルス生成部37に出力する。
【0038】
UWBパルス生成部37は、送信パルスパターン生成部39から出力された送信パターン信号の立ち上がりに同期してUWBパルス信号を生成する。UWBパルス生成部37は、生成されたUWBパルス信号をVGA35,36にそれぞれ出力する。
【0039】
VGA35,36は、自折り返しパルスレベル制御部42,送信パワー制御部43により調整されたゲインによって、UWBパルス生成部37から出力されたUWBパルス信号を増幅する。VGA35により増幅されたUWBパルス信号は、BPF31によってUWBパルス信号の帯域が制限された後、自折り返しパルスとして、指向性を有する第1送信アンテナ26から受信アンテナ11に向けて送信される。一方、VGA36により増幅されたUWBパルス信号は、BPF32によってUWBパルス信号の帯域が制限された後、送信パルスとして、第2送信アンテナ27からタグ8に送信される。
【0040】
図4は、第1の実施形態におけるタグ8の内部構成を示すブロック図である。タグ8は、図4に示す様に、受信アンテナ51、検波器53、タグID付加部56、受信レベル判定部57、折り返し制御部59、送信アンテナ61、バンドパスフィルタ(BPF)62、UWBパルス生成部65、タイマ制御部67及び電源68を含む構成である。
【0041】
受信アンテナ51は、リーダ5から送信されたパルスを受信する。受信されたパルスは検波器53に入力される。
【0042】
検波器53は、ローパスフィルタ(LPF)53aを有し、受信アンテナ51において受信されたパルスを検波し、検波信号をタグID付加部56及び受信レベル判定部57にそれぞれ出力する。なお、図4において、ローパスフィルタ53aは、検波器53に含まれる構成であるが、検波器53からの出力を入力可能に検波器53とは別に構成されても良い。
【0043】
受信レベル判定部57は、後述する様に、2つの閾値を予め有しており、検波器53により検波されたパルス信号の受信レベルを測定し、測定された受信レベルを基に、リーダ5に対して折り返しパルスを送信するか否かを判定する。受信レベル判定部57は、判定結果を折り返し制御部59に出力(通知)する。
【0044】
折り返し制御部59は、受信レベル判定部57の判定結果を基に、リーダ5に対して折り返しパルスを送信する場合、タグID付加部56及びUWBパルス生成部65を動作させる。
【0045】
タグID付加部56は、検波器53により検波されたパルス信号に対し、自タグIDを表すパルスのON/OFFを制御し、その結果、値1と値0とにより表される自タグIDの信号をUWBパルス生成部65に出力する。
【0046】
UWBパルス生成部65は、タグID付加部56から出力された信号を基に、タグID付加部56から出力された信号の立ち上がりに同期するUWBパルス信号を生成する。UWBパルス信号は、BPF62においてUWBパルス信号の帯域が制限され、送信アンテナ61から折り返しパルスとして送信される。
【0047】
又、タグ8は、タイマ制御部67の動作により、周期ごとに起動状態又はスリープ状態を繰り返す。起動時には電源68によりタグ8の各部が通電され、スリープ時にはタグ8の各部への通電が遮断される。
【0048】
次に、上述したリーダ5及びタグ8を含む無線測距システムの動作を示す。図5は、リーダ5及びタグ8の動作を説明する説明図である。図5(A)は、タグ8により検出されるパルスの受信レベルに対して設定された第1の閾値及び第2の閾値を示すグラフである。上述した様に、タグ8の受信レベル判定部57は、予め設定された第1の閾値及び第2の閾値を保持している。タグ8は、受信レベル判定部57の判定結果に応じて、第1の閾値より受信レベルが小さいパルス、及び第2の閾値より受信レベルが大きいパルスに対し、折り返しパルスを送信しない。
【0049】
図5(B)は、リーダと、リーダから異なる距離に位置する3つのタグとの位置関係を示す説明図である。3つのタグ8を、それぞれタグA、タグB、タグCと表すとする。図5(C)は、タグ8(タグA、タグB、タグC)でのパルスの受信レベルとリーダ5での折り返しパルスの受信レベルの組合せに応じて、利得制御を適切に行い正確な測距を実現するためのリーダにおける制御パターンの一例を示す説明図を示す。
【0050】
リーダ制御部25は、受信ゲイン制御部41、自折り返しパルスレベル制御部42及び送信パワー制御部43を用いて、タグとリーダ双方でのパルスの受信レベルに応じて適切な利得制御を実現するため、それぞれ送信電力、受信ゲイン及び自折り返しパルスの送信レベルの組合せを周期的に切り替える。
【0051】
第1の組合せにおいては、リーダ制御部25は、送信電力(パワー:レベル)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する。この場合、タグAとタグBにおいては、リーダ5から送信されたパルスの受信レベルが第1の閾値より小さいため、折り返しパルスは送信されない。一方、タグCにおいては、リーダ5から送信されたパルスの受信レベルが第1の閾値より大きいため、折り返しパルスは送信される。
【0052】
この場合、リーダ5とタグCとの間の距離は近く、リーダ5におけるタグCからの折り返しパルスの受信レベルは大きいと想定されるため、自折り返しパルスのレベルも大きく設定し、受信ゲインを小さく設定する。
【0053】
第2の組合せにおいては、リーダ制御部25は、送信電力(パワー:レベル)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する。この場合、タグAにおいては、リーダ5から送信されたパルスの受信レベルが第1の閾値より大きいため、折り返しパルスは送信される。タグBにおいては、リーダ5から送信されたパルスの受信レベルが第1の閾値より小さいため、折り返しパルスは送信されない。タグCにおいては、リーダ5から送信されたパルスの受信レベルが第2の閾値より大きいため、折り返しパルスは送信されない。
【0054】
この場合、リーダ5におけるタグAからの折り返しパルスの受信レベルは中程度と想定されるため、自折り返しパルスのレベルも中程度に設定し、受信ゲインも中程度に設定する。
【0055】
第3の組合せにおいては、リーダ制御部25は、送信電力(パワー:レベル)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「大」、「大」、「小」に設定する。この場合、タグAとタグCとにおいては、リーダ5から送信されたパルスの受信レベルが第2の閾値より大きいため、折り返しパルスは送信されない。一方、タグBにおいては、リーダ5から送信されたパルスの受信レベルが第2の閾値より小さく第1の閾値より大きいため、折り返しパルスは送信される。
【0056】
この場合、リーダ5とタグBとの間の距離は遠く、リーダ5におけるタグBからの折り返しパルスの受信レベルは小さいと想定されるため、自折り返しパルスのレベルも小さく設定し、受信ゲインを大きく設定する。
【0057】
この様に、リーダ5から送信されたパルスの送信レベルに合わせて受信ゲインを設定し、設定された受信ゲインに合わせて自折り返しパルスの送信レベルが設定された組合せに切り替えられる。
【0058】
なお、本実施形態では、送信電力、受信ゲイン及び自折り返しパルスの送信レベルの組合せについて3通りの動作を周期的に切り替える場合を示したが、リーダ制御部25は、3通りに限らず、任意の数の動作を切り替えても良い。
【0059】
図6は、タグ8の起動期間及びスリープ期間を示すタイミングチャートである。タグ8は、図6の第1段に示す様に、起動している状態である起動期間と、例えば消費電力を低減するためのスリープ状態であるスリープ(Sleep)期間とを交互に繰り返す。図6の第2段〜第5段においては、タグ8として、タグA〜Dがそれぞれ非同期に上述した2つの状態を繰り返す場合が示されている。又、タグ8が起動状態にある起動期間とスリープ状態にあるスリープ期間を合わせた期間をウェイクアップ(Wake Up)周期という。
【0060】
次に、リーダ5の動作手順を、図7を参照して説明する。
【0061】
図7は、第1の実施形態のリーダ5の動作手順を示すフローチャートである。図7の各動作のうち測距部21及びリーダ制御部25により実行される各動作のプログラムは、リーダ5に内蔵されるROM(Read Only Memory)に格納され、測距部21及びリーダ制御部25をそれぞれ構成しリーダ5に内蔵されるCPU(Central Processing Unit)によって実行される。
【0062】
リーダ5のリーダ制御部25は、送信パワー制御部43、受信ゲイン制御部41及び自折り返しパルスレベル制御部42を用いて、送信電力(パワー:レベル)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「小」、「小」、「大」に設定する(S11)。
【0063】
リーダ5は、パルス及び自折り返しパルスを送信し、タグ8から送信された折り返しパルスを基に、リーダ5とタグ8との間の距離を測定する(S12)。ステップS12の後、リーダ5は、ウェイクアップ周期の2倍以上に予め設定された周期Nが経過したか否かを判別する(S13)。なお、リーダ5は、図3に図示していないタイマを含み、タイマからの出力に応じて、周期Nが経過したか否かを判別する。
【0064】
周期Nが経過していない場合(S13、NO)、リーダ5は、ステップS12に戻り、同様の処理を繰り返す。一方、ステップS13において周期Nが経過している場合(S13、YES)、リーダ5のリーダ制御部25は、送信パワー制御部43、受信ゲイン制御部41及び自折り返しパルスレベル制御部42を用いて、送信電力(パワー)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「中」、「中」、「中」に設定する(S14)。
【0065】
リーダ5は、パルス及び自折り返しパルスを送信し、タグ8から送信された折り返しパルスを基に、リーダ5とタグ8との間の距離を測定する(S15)。ステップS15の後、リーダ5は、ウェイクアップ周期の2倍以上に予め設定された周期Nが経過したか否かを判別する(S16)。
【0066】
周期Nが経過していない場合(S16、NO)、リーダ5は、ステップS15に戻り、同様の処理を繰り返す。一方、ステップS16において周期Nが経過している場合(S16、YES)、リーダ5のリーダ制御部25は、送信パワー制御部43、受信ゲイン制御部41及び自折り返しパルスレベル制御部42を用いて、送信電力(パワー)、受信ゲイン、自折り返しパルスの送信レベルをそれぞれ「大」、「大」、「小」に設定する(S17)。
【0067】
リーダ5は、パルス及び自折り返しパルスを送信し、タグ8から送信された折り返しパルスを基に、リーダ5とタグ8との間の距離を測定する(S18)。ステップS18の後、リーダ5は、ウェイクアップ周期の2倍以上に予め設定された周期Nが経過したか否かを判別する(S19)。
【0068】
周期Nが経過していない場合(S19、NO)、リーダ5は、ステップS18に戻り、同様の処理を繰り返す。一方、ステップS19において周期Nが経過している場合(S19、YES)、リーダ5は、ステップS11の処理に戻る。
【0069】
次に、タグ8の動作手順を、図8を参照して説明する。
【0070】
図8は、第1の実施形態のタグ8の動作手順を示すフローチャートである。図8の各動作のうち受信レベル判定部57及び折り返し制御部59により実行される動作のプログラムは、タグ8に内蔵されるROMに格納され、電源オン時にタグ8に内蔵されるCPUによって実行される。
【0071】
先ず、タグ8は、ウェイクアップ周期の起動状態(起動期間)になる(S21、図6の第1段参照)。タグ8の受信レベル判定部57は、リーダ5から送信されたパルスの受信レベルを測定する(S22)。具体的には、受信レベル判定部57は、一定の期間に複数のパルス信号を受信し、受信された複数のパルス信号を基に受信レベルを測定する。更に、タグ8の受信レベル判定部57は、パルスの受信レベルが第1の閾値より小さいか又は第2の閾値より大きいかを判定する(S23)。受信レベルが第1の閾値以上第2の閾値以下である場合に(S23、NO)、タグ8は、折り返しパルスを送信する(S24)。タグ8は、ステップS21の起動期間が終了すると、スリープ(Sleep)状態(スリープ期間)に入る(S25、図6の第1段参照)。
【0072】
一方、ステップS23において受信レベルが第1の閾値より小さい又は第2の閾値より大きい場合には(S23、YES)、タグ8は折り返しパルスを送信せず、タグ8の動作はステップS25の処理に進む。
【0073】
タグ8は、タイマ制御部67からの出力を基に、スリープ期間が満了したか否かを判別する(S26)。タグ8は、スリープ期間が満了していない場合に(S26、NO)、ステップS25の処理に戻ってスリープ状態を継続する。一方、スリープ期間が満了している場合には(S26、YES)、タグ8の動作はステップS21の処理に戻る。
【0074】
この様に、第1の実施形態の無線測距システムによれば、タグ8から送信される折り返しパルスの受信レベルが高速に大きく変動する環境においても、適切な利得により折り返しパルスを受信し、リーダ5とタグ8との間において正確に測距できる。
【0075】
即ち、リーダ5は、折り返しパルスを送信するタグ8を、パルスの送信レベルに応じて分けることができ、想定される折り返しパルスの受信レベルに応じてリーダ5における受信ゲインを適切に設定できる。
【0076】
例えばリーダ5とタグ8との間の距離を例に考えた場合、送信レベルが小さければ、リーダ5からの距離が近いタグ8からのみ折り返しパルスが送信されるため、距離減衰が小さいことを考慮し受信ゲインを小さく設定すればよい。
【0077】
一方、送信レベルが大きければ、リーダ5からの距離が遠いタグ8からのみ折り返しパルスが送信されるため、距離減衰が大きいことを考慮し受信ゲインを大きく設定すればよい。
【0078】
また図24に示すように、リーダ5とタグ8との間に障害物が存在する場合を考えると、送信レベルが小さければ、リーダ5との間に障害物が無いタグ8からのみ折り返しパルスが送信されるため、障害物による減衰がないことを考慮し受信ゲインを小さく設定すればよい。
【0079】
一方、送信レベルが大きければ、リーダ5との間に障害物があるタグ8からのみ折り返しパルスが送信されるため、障害物による減衰があることを考慮し受信ゲインを大きく設定すればよい。
【0080】
又、リーダ5は、折り返すタグを、タグにおけるパルスの受信レベルに応じて制限できるので、リーダ5において受信レベルの高いパルス波形(例えばリーダ5からの距離が近いタグ8による折り返しパルス)の裾に受信レベルの低いパルス(例えばリーダ5からの距離が遠いタグ8による折り返しパルス)が埋もれる様な(図25参照)、複数のタグ8からの折り返しパルスの干渉を軽減し、タグを容易に検出できる。
【0081】
同様に、図24に示す状態において、前向きの場合Fのタグ108による折り返しパルスと、後向きの場合Bのタグ108による折り返しパルスの間の干渉も回避することができる。
【0082】
更に、リーダ5は、折り返しパルスを送信するタグ8を制限することにより、マルチパス(反射波)による干渉も低減できる。
【0083】
図9は、マルチパスによる干渉の低減を説明する説明図である。図9(A)は、障害物が存在する場合の説明図である。図9(B)は、マルチパスによる干渉が発生している様子を示す説明図である。図9(A)に示す様に、障害物が存在する場合、タグAからの折り返しパルスが障害物により反射され、リーダに到達する距離と、タグBからの折り返しパルスが直接リーダに到達する距離とがほぼ等しいとする。この場合、従来技術では、図9(B)に示す様なマルチパスによる干渉が生じる。しかしながら、本実施形態では、タグAとタグBとは、同時に折り返しパルスを送信しないため、各折り返しパルスの干渉は生じない。
【0084】
なお、本実施形態においては、自折り返しパルスを検出することにより、基準時間となるパルス送信タイミングを決定しているが、自折り返しバルスを検出しないで、パルス送信タイミングを決定しても良い。
【0085】
図10は、自折り返しパルスを検出しないで、パルス送信タイミングを決定する場合のリーダ5Aの構成を示すブロック図である。リーダ5Aにおいては、図3の構成と比較すると、自折り返しパルスの送信に係る部分の構成、即ち、送信アンテナ26、BPF31、VGA35、及び自折り返しパルスレベル制御部42が省かれている。又、UWBパルス生成部37から測距部21にパルス送信タイミングの信号線37aが接続されている。その他の構成は図3の構成と同じである。
【0086】
リーダ5Aにおいて、タグID検出部19は、検出されたタグIDと検出タイミングとを測距部21に出力(通知)する。測距部21は、タグID検出部19から出力された検出タイミングと、UWBパルス生成部37から信号線37aを介して取得したパルス送信タイミングとを基に、リーダ5とタグ8との間の距離を求める。この様に、図3のリーダ5の構成に比べて、自折り返しパルスを送信しないことにより、リーダ5Aの構成を簡易に実現できる。
【0087】
(第2の実施形態)
第2の実施形態の無線測距システムは、上述した第1の実施形態と同一の構成を有する部分について同一の符号を付すことにより、説明を省略し、第1の実施形態と異なる構成および動作について説明する。
【0088】
図11は、第2の実施形態におけるリーダ5Bの内部構成を示すブロック図である。リーダ5Bにおいては、図3の構成と比較すると、リーダ制御部25、VGA13、コンパレータ15、送信アンテナ26、BPF31及びVGA35,36が省かれている。又、送信パルスパターン生成部39から測距部21にパルス送信タイミングの信号線39aが接続されている。その他の構成は図3のリーダ5の構成と同じである。
【0089】
リーダ5Bは、受信アンテナ11を介して、タグ8から送信された折り返しパルスを受信し、受信された折り返しパルスを検波器12において検波し、検波信号をフリップフロップ17に出力する。フリップフロップ17は、検波部12から出力された検波信号をサンプリングし、サンプリング結果をタグID検出部19に出力する。
【0090】
タグID検出部19は、フリップフロップ17から出力されたサンプリング結果を基に、第1の実施形態と同様にタグIDを判定し、タグID及び検出タイミングを測距部21に出力(通知)する。
【0091】
測距部21は、タグID検出部19から出力された検出タイミングと、送信パルスパターン生成部39から信号線39aを介して取得したパルス送信タイミングとを基に、リーダ5Bとタグ8Bとの間の距離を求める。
【0092】
送信パルスパターン生成部39は、リーダ5Bに固有の送信パターン信号(図2(A)参照)を生成し、生成された送信パターン信号をUWBパルス生成部37に出力する。送信パルスパターン生成部39は、送信タイマ46から出力される送信中断指示を基に、パルス送信を停止可能である。
【0093】
UWBパルス生成部37は、送信パルスパターン生成部39から出力された送信パターン信号の立ち上がりに同期してUWBパルス信号を生成する。
【0094】
送信タイマ46は、タグID検出部19から出力されるフレーム異常通知を基に、又は送信タイマ46に内蔵されている自走カウンタの制御により長時間(例えば数時間)に一度の割合にて、送信中断指示を送信パルスパターン生成部39に送出する。
【0095】
図12は、第2の実施形態におけるタグ8Bの内部構成を示すブロック図である。タグ8Bは、図4のタグ8と比較すると、パルス放射テーブル部72を更に含む構成である。その他の構成は図4のタグ8の構成と同じである。
【0096】
タグ8Bは、受信アンテナ51を介して、リーダ5Bから送信されたパルスを受信する。受信されたパルスは、検波器53に入力される。検波器53は、入力されたパルスを検波し、タグID付加部56、受信レベル判定部57及びパルス放射テーブル部72にそれぞれ出力する。
【0097】
受信レベル判定部57は、検波器53から出力された検波信号から得られる受信レベルを基に、リーダ5Bから送信されるパルスの有無を判定し、判定結果を折り返し制御部59Aに出力する。
【0098】
パルス放射テーブル部72は、送信再開時間テーブル72aを保持し、検波器53から出力された検波信号の受信レベルを基に、リーダ5Bがパルスの送信を再開した後においてパルスの折り返し送信の待ち時間を決定する。パルス放射テーブル部72は、決定された送信待ち時間を折り返し制御部59Aに出力(通知)する。
【0099】
折り返し制御部59Aは、タイマ59aを有し、スリープ、トレーニング、パルス折り返しのタイミングを制御し、更に、リーダ5Bに対して折り返して送信するか否かをタグID付加部56に指示する。トレーニングとは、リーダ5Bから送信されたパルスの受信レベルを測定するが、リーダ5Bに対して折り返して送信しない動作である。
【0100】
タグID付加部56は、検波器53から出力された検波信号に対し、自タグIDを表すパルスのON/OFFを制御し、その結果、値1と値0とにより表される自タグIDの信号をUWBパルス生成部65に出力する。
【0101】
UWBパルス生成部65は、タグID付加部56から出力された信号を基に、タグID付加部56から出力された信号の立ち上がりに同期するUWBパルス信号を生成する。UWBパルス信号は、BPF62においてUWBパルス信号の帯域が制限され、送信アンテナ61から折り返しパルスとして送信される。
【0102】
次に、上述したリーダ5B及びタグ8Bを含む無線測距システムの動作を示す。図13は、リーダ5B及びタグ8Bの送受信を示すタイミングチャートである。
【0103】
リーダ5Bは、タグ8Bから送信された折り返しパルスのフレームに誤り(例えば、プリアンプルパターン異常、タグIDに対するCRCエラー)がある状態が、一定期間継続した場合、各タグ8Bから送信された各折り返しパルスの間において干渉が発生しているとみなす。一定期間は、例えば図13のタイミングeにおいて、タグ8Bから送信された第3番目の折り返しパルスの受信タイミングである。
【0104】
図13のタイミングeにおいては、リーダ5Bは、タグ8Bを識別することが困難である。このため、リーダ5Bは、パルスの送信を一定期間(所定時間)中断し、その後、再度パルスの送信を開始する。中断する一定期間とは、例えばタグ8Bに送信するパルスのフレーム以上に相当する期間であり、より望ましくはタグ8Bのウェイクアップ周期以上である。
【0105】
タグ8Bは、リーダ5Bから送信されたパルスを受信するか否かを監視し、一定期間パルスを検出しない場合にリーダ5Bから送信されたパルスを再び検出すると、次の手順に従ってトレーニングする。
【0106】
具体的には、タグ8Bは、リーダ5Bから送信されたパルスの受信レベルを測定するが、折り返しパルスをリーダ5Bに対して返信しない。タグ8Bは、パルス放射テーブル部72に保持されている送信再開時間テーブルを基に、測定されたパルスの受信レベルに応じた送信待ち時間を決定する。
【0107】
トレーニング期間満了後、タグ8Bは、決定された送信待ち時間が経過した後、折り返しパルスをリーダ5Bに対して返信する。なお、本実施形態においては、タグ8Bは、受信されたパルスのフレームに誤りがあった場合、トレーニングするが、フレームに誤りがない場合でも、所定時間が経過する度にトレーニングしても良い。
【0108】
図14は、トレーニング期間において決定される送信待ち時間を説明する説明図である。図14(A)は、リーダ5Bとリーダ5Bから異なる距離に位置する3つのタグA、タグB、タグCとの位置関係を示す説明図である。図14(B)は、各タグにおいて受信されたパルスの受信レベルを示すグラフである。図14(C)は、送信再開時間テーブル72aの一例を示す説明図である。
【0109】
図14(A)に示す様に、タグ8BとしてタグA、タグB、タグCの3つに対し、リーダ5Bから送信されるパルスの受信レベルは、図14(B)に示すとおりである。即ち、図14(B)に示す様に、リーダ5Bに最も近いタグAにおいて測定される受信レベルLは、レベル2m〜3mの範囲にある。タグAより遠い位置にあるタグBにおいて測定される受信レベルLは、レベルm〜2mの範囲にある。リーダ5Bから最も遠い位置にあるタグCにおいて測定される受信レベルLは、レベルmより小さい。
【0110】
図14(C)の送信再開時間テーブル72aにおいては、送信待ち時間は、例えば受信レベルに応じて3つ設定されている。即ち、タグCにおいて測定される受信レベルLがレベルm未満では、送信待ち時間は、T〜2Tの範囲に設定される。タグBにおいて測定される受信レベルLがレベルm以上2mより小さい場合、送信待ち時間は、3T〜4Tの範囲に設定される。タグAにおいて測定される受信レベルLがレベル2m以上では、送信待ち時間は、4T〜5Tの範囲に設定される。
【0111】
この様に、リーダ5Bにおいて、受信レベルの小さいタグCから、折り返しパルスを検出するため、リーダ5Bから遠方にあるタグの検出率が向上する。又、距離の異なるタグから送信される折り返しパルスの干渉が軽減する。
【0112】
次に、リーダ5Bの動作手順を、図15を参照して説明する。
【0113】
図15は、第2の実施形態のリーダ5Bの動作手順を示すフローチャートである。図15の各動作のうち測距部21により実行される動作のプログラムは、リーダ5Bに内蔵されるROMに格納され、測距部21を構成しリーダ5Bに内蔵されるCPUによって実行される。
【0114】
リーダ5Bの検波部12は、タグ8Bから送信された折り返しパルスのフレームに誤りがある状態が一定期間継続したか、即ちw回連続して発生したか否かを判別する(S31)。パラメータwは自然数である。
【0115】
w回連続して発生していない場合(S31、NO)、リーダ5Bは、図7と同様にタグIDを検出し、測距する(S35)。ステップS35の後、リーダ5Bの動作はステップS31の処理に戻る。なお、ステップS35においては、リーダ5Bは、第1の実施形態において説明した様な、送信電力、受信ゲイン及び自折り返しパルスレベルを含む組合せを切り替えても良いし、又は切り替えなくても良い。送信電力、受信ゲイン及び自折り返しパルスレベルを含む組合せを切り替える場合には、リーダ5Bは、図3のリーダ5のリーダ制御部25を更に含む構成となる。
【0116】
一方、ステップS31において、タグ8Bから送信された折り返しパルスのフレームに誤りがw回連続して発生している場合(S31、YES)、リーダ5Bの送信パルスパターン生成部39は、各タグ5Bから送信された各折り返しパルス間において干渉が発生しているとして、送信タイマ46から出力された送信中断指示に従ってリーダIDのパルス送信を停止する(S32)。
【0117】
リーダ5Bは、送信タイマ46(送信中断タイマ)が満了になるまで待つ(S33)。送信タイマ46が満了になると、リーダ5Bは、リーダIDのパルスの送信を再開する(S34)。次に、リーダ5Bの動作は、ステップS31の処理に戻る。
【0118】
図16は、第2の実施形態のタグ8の動作手順を示すフローチャートである。図16の各動作のうち受信レベル判定部57、折り返し制御部59A及びパルス放射テーブル部72により実行される動作のプログラムは、タグ8Bに内蔵されるROMに格納され、電源オン時にタグ8Bに内蔵されるCPUによってスリープ中も実行される。
【0119】
先ず、タグ8Bは、スリープ状態(スリープ期間)に入り(S41)、その後、スリーブ期間が満了するまで待つ(S42)。
【0120】
スリープ期間が満了すると(S42、YES)、タグ8Bの検波器53は、リーダ5Bから送信されたパルスを検出したか否かを判別する(S43)。パルスを検出した場合(S43、YES)、タグ8Bは、n(例えばn=3)回の折り返し送信パルスをリーダ5Bに返信する(S50)。ステップS50の後、タグ8Bは、ステップS41の処理、即ちスリープ状態(スリープ期間)に戻る。
【0121】
一方、ステップS43においてパルスを検出しない場合(S43、NO)、タグ8Bは、リーダ5Bのパルス送信の中断期間として例えばウェイクアップ周期が経過するのを待ち(S44)、パルスを検出したか否かを判別する(S45)。パルスが検出されない場合(S45、NO)、タグ8Bは、S(例えばS=4)回目であるか否かを判別する(S46)。S回目でない場合(S46、NO)、タグ8Bの動作はステップS45の処理に戻る。S回目である場合(S46、YES)、タグ8Bの動作はステップS41の処理に戻る。
【0122】
又、一方、ステップS45においてリーダ5Bから送信されたパルスが検出された場合(S45、YES)、タグ8Bの受信レベル判定部57は、パルスの受信レベルを測定する(S47)。タグ8Bのパルス放射テーブル部72は、検波器53から出力された検波信号を基に、送信再開時間テーブル72aを参照して送信待ち時間を決定する(S48)。
【0123】
タグ8Bの折り返し制御部59Aは、タイマ59aからの出力を基に、ステップS48において決定された送信待ち時間が満了するまで待つ(S49)。送信待ち時間が満了すると(S49、YES)、タグ8Bの動作は、ステップS50の処理に進む。
【0124】
この様に、第2の実施形態の無線測距システムによれば、リーダ5Bは、タグ8Bから送信された折り返しパルスに応じて、タグ8Bに対するパルス送信を中断及び再開できる。又、タグ8Bは、リーダ5Bからのパルス送信の中断及び再開を検出でき、復調処理することなく、折り返しパルスの返信タイミングを制御できる。
【0125】
又、第2の実施形態の無線測距システムによれば、受信レベルの小さい、つまり、遠方にあるタグから、折り返しパルスが検出されるので、遠方にあるタグの検出率が向上し、距離の異なるタグからのパルスの干渉を軽減できる。
【0126】
(第3の実施形態)
第3の実施形態の無線測距システムは、上述した第1及び第2の実施形態と同一の構成を有する部分について同一の符号を付すことにより、説明を省略し、第1及び第2の実施形態と異なる構成および動作について説明する。
【0127】
図17は、第3の実施形態におけるリーダ5Cの内部構成を示すブロック図である。リーダ5Cにおいては、送信パルスパターン生成部39Aは、送信タイマ46からの指示を基に、送信パルス間隔を変更する。例えば、第3の実施形態において、送信パルス間隔は、T、2T、4T、8Tのうちいずれかに設定される。
【0128】
図18は、第3の実施形態におけるタグ8Cの内部構成を示すブロック図である。タグ8Cにおいては、図12のタグ8Bと比べ、パルス放射テーブル部72が省かれている。受信レベル判定部57Aは、検波器53から出力された検波信号から得られる受信レベル及び受信パルス間隔を基に、判定テーブル57bを参照し、折り返しパルスを送信するか否かを判定する。
【0129】
図19は、送信パルスのパルスパターンを示すタイミングチャートである。リーダ5Cとタグ8Cとの間の距離が距離0〜Lである場合、リーダ5Cは、パルス間隔8Tによってパルスを送信する。リーダ5Cとタグ8Cとの間の距離が距離L〜2Lである場合、リーダ5Cは、パルス間隔4Tによってパルスを送信する。リーダ5Cとタグ8Cとの間の距離が距離2L〜3Lである場合、リーダ5Cは、パルス間隔2Tによってパルスを送信する。リーダ5Cとタグ8Cとの間の距離が距離3L〜4Lである場合、リーダ5Cは、パルス間隔Tによってパルスを送信する。
【0130】
図20は、パルス受信レベル及びパルス受信間隔を基に折り返しパルスを返信するか否かの判定を示す説明図である。図20(A)は、タグ8Cがリーダ5Cからパルスを受信した場合に、自タグ8Cが折り返しパルスを送信するか否かを判定するための判定テーブル57bを示す。判定テーブル57bには、パルスの受信間隔と受信レベルを基に、自タグ8Cが折り返しパルスを送信する機会が示されている。なお、パルスの受信レベルは、例えば、予めトレーニングによりタグ8Cにおいて既知であるとする。
【0131】
図20(A)の判定テーブル57bにおいて、○印は、自タグ8Cが折り返しパルスを送信する機会であることを示す。同様に、×印は、自タグ8Cが折り返しパルスを送信する機会ではないことを示す。
【0132】
具体的に、受信間隔がTであり、かつ受信レベルがP/16〜P/8である場合には、自タグ8Cが折り返しパルスを送信する機会である。又、受信間隔が2Tであり、受信レベルがP/8〜P/4である場合、自タグ8Cが折り返しパルスを送信する機会である。又、受信間隔が4Tであり、受信レベルがP/4〜P/2である場合、自タグ8Cが折り返しパルスを送信する機会である。又、受信間隔が8Tであり、受信レベルがP/2〜Pである場合、自タグ8Cが折り返しパルスを送信する機会である。
【0133】
図20(B)は、パルス受信間隔とパルスの受信レベル(電力)との関係の一例を示す説明図である。図20(B)には、パルス受信間隔がTであり、受信レベルがP/16〜P/8である場合に、自タグ8Cが折り返しパルスを送信する機会である送信パルスが示されている。
【0134】
図21は、第3の実施形態のリーダ5Cの動作手順を示すフローチャートである。図21の各動作のうち測距部21により実行される動作のプログラムは、リーダ5Cに内蔵されるROMに格納され、測距部21を構成しリーダ5Cに内蔵されるCPUによって実行される。
【0135】
先ず、リーダ5Cは、パルスの送信間隔の設定を変更する(S71)。パルスの送信間隔の設定の変更においては、送信パルス間隔がTである場合、2倍の2Tに変更される。又、送信パルス間隔が2Tである場合、2倍の4Tに変更される。同様に、送信パルス間隔が4Tである場合、2倍の8Tに変更される。さらに、送信パルス間隔が8Tである場合、Tに変更される。以後、送信パルス間隔は、循環的に変更される。
【0136】
リーダ5Cは、変更されたパルスの送信間隔を用いてパルスを送信し、図7と同様にタグIDの検出及びリーダ5Cとタグ8Cとの間の距離を測定する(S72)。ステップS72の後、リーダ5Cの動作はステップS71の処理に戻る。なお、ステップS72においては、リーダ5Cは、第1の実施形態において説明した様な、送信電力、受信ゲイン及び自折り返しパルスレベルを含む組合せを切り替えても良いし、又は切り替えなくても良い。送信電力、受信ゲイン及び自折り返しパルスレベルを含む組合せを切り替える場合には、リーダ5Cは、図3のリーダ5のリーダ制御部25を更に含む構成となる。
【0137】
図22は、第3の実施形態のタグ8Cの動作手順を示すフローチャートである。図22の各動作のうち受信レベル判定部57A及び折り返し制御部59Aにより実行される動作のプログラムは、タグ8Cに内蔵されるROMに格納され、電源オン時にタグ8Cに内蔵されるCPUによってスリープ中も実行される。
【0138】
先ず、タグ8Cは、スリープ状態(スリープ期間)に入り(S81)、その後、スリープ期間が満了するまで待つ(S82)。
【0139】
スリープ期間が満了すると(S82、YES)、タグ8Cの検波器53は、リーダ5Cから送信されたパルスを検出したか否かを判別する(S83)。パルスを検出していない場合(S83、NO)、タグ8Cの動作はステップS81の処理に戻る。
【0140】
一方、ステップS83においてリーダ5Cから送信されたパルスを検出した場合(S83、YES)、タグ8Cの受信レベル判定部57Aは、リーダ5Cから送信されたパルスの受信間隔及び受信レベルを判定する(S84)。タグ8Cの受信レベル判定部57Aは、ステップS84において判定されたパルスの受信間隔及び受信レベルを基に、条件1が満たされるか否か、即ち、送信パルスの受信レベルがP/16以上であってP/8未満であり、かつ、受信間隔がTであるか否かを判別する(S85)。
【0141】
条件1が満たされた場合(S85、YES)、タグ8Cは、スリープ状態(スリープ期間)から起動(ウェイクアップ)し、n(例えばn=3)回の折り返し送信パルスをリーダ5Cに返信する(S86)。ステップS86の後、タグ8Cの動作はステップS81の処理に戻る。
【0142】
一方、ステップS85において条件1が満たされない場合(S85、NO)、タグ8Cの受信レベル判定部57Aは、条件2が満たされるか否か、即ち、送信パルスの受信レベルがP/8以上であってP/4未満であり、かつ、受信間隔が2Tであるか否かを判別する(S87)。条件2が満たされる場合(S87、YES)、タグ8Cの動作はステップS86の処理に進む。
【0143】
一方、ステップS87において条件2が満たされない場合(S87、NO)、タグ8Cの受信レベル判定部57Aは、条件3が満たされるか否か、即ち、送信パルスの受信レベルがP/4以上であってP/2未満であり、かつ、受信間隔が4Tであるか否かを判別する(S88)。条件3が満たされる場合(S88、YES)、タグ8Cの動作はステップS86の処理に進む。
【0144】
一方、ステップS88において条件3が満たされない場合(S88、NO)、タグ8Cの受信レベル判定部57Aは、条件4が満たされるか否か、即ち、送信パルスの受信レベルがP/2以上であってP未満であり、かつ、受信間隔が8Tであるか否かを判別する(S89)。条件4が満たされる場合(S89、YES)、タグ8Cの動作はステップS86の処理に進む。
【0145】
一方、ステップS89において条件4が満たされない場合(S89、NO)、タグ8Cの折り返し制御部59Aは、受信レベル判定部57Aからの出力、即ち、リーダ5Cからのパルスの受信間隔及び受信レベルを基に、タグ8Cのスリープ期間kを算出する(S90)。ステップS90において、タグ8Cのスリープ期間kは、折り返し制御部59Aにより数式(1)に従って算出される。
【0146】
【数1】
【0147】
スリープ期間kの算出について具体的に説明する。例えば、ステップS84において判定されたパルスの受信間隔が8Tであって、受信レベルがP/16〜P/8である場合におけるスリープ期間kを算出する例を説明する。
【0148】
タグ8Cの折り返し制御部59Aは、ステップS84において受信レベル判定部57Aにより判定されたパルスの受信間隔を基に、数式(1)の現在の送信期間が図19における送信期間A、B、C、Dのうちいずれであるかを把握する。例えば、リーダ5Cから送信されるパルスの送信期間(送信間隔)が受信間隔8T(図19参照)である場合、折り返し制御部59Aは、数式(1)における現在の送信期間を送信期間Aであると判定する。
【0149】
更に、折り返し制御部59Aは、ステップS84において判定された受信レベル及び判定テーブル57bを基に、数式(1)におけるウェイクアップ時から自送信機会までの時間を算出する。例えば、リーダ5Cから送信されるパルスの受信レベルがP/16〜P/8である場合、折り返し制御部59Aは、現在の送信期間(送信期間A)から次の自送信機会(送信期間D)までの時間を、図19における時間TA+TB+TCと判定する。
【0150】
ここで、上述した具体例において、受信レベルがP/16〜P/8の場合にタグ8Cの次の自送信機会が送信期間Dとなるのは、次の理由による。即ち、受信レベルP/16〜P/8であってパルスの受信間隔が受信間隔Tとなる場合に、タグ8Cが折り返しパルスを送信する機会であることが図20(A)の判定テーブル57bにおいて定められているためである(図20(A)の判定テーブル57bの○印参照)。
【0151】
但し、タグ8Cのウェイクアップ時の送信期間Aにおける詳細な時間は定かでないため、スリープ期間kの算出においては、スリープ期間kが送信期間Dを超過しないために、(現在の送信期間/2)が減算されている(数式(1)参照)。
【0152】
従って、折り返し制御部59Aは、ステップS84において判定されたパルスの受信間隔が8Tであってパルスの受信レベルがP/16〜P/8である場合には、数式(1)に従って、スリープ期間kを、k=(TA+TB+TC)−TA/2と算出する。
【0153】
折り返し制御部59Aは、タグ8CがステップS90において算出されたスリープ期間kの間スリープする旨を、図18に不図示の電源制御部に指示する。これにより、タグ8Cは、ステップS90において算出されたスリープ期間kの間スリープする(S91)。上述した具体例においては、タグ8Cは、次の送信期間Dとなるまでスリープする。k秒間のスリープ期間が満了すると(S82、YES)、タグ8Cの動作はステップS83に進み、以降は同様の動作が繰り返される。
【0154】
この様に、第3の実施形態の無線測距システムによれば、リーダ5Cとタグ8Cとの間の距離に応じて、タグからの折り返しパルスの送信を制御できる。又、第3の実施形態においては、リーダ5Cからタグ8Cが遠いほど、受信パルス数が増えるので、リーダ5Cにおける相関利得を上げることができ、遠方にあるタグ8Cの検出率を高めることができる。更に、本実施形態の無線距離システムによれば、距離が異なる各タグ8Cから同時に各折り返しパルスを受信することがないため、マルチパスによる干渉を低減できる。
【0155】
以上、図面を参照しながら各種の実施形態について説明したが、本発明はかかる例に限定されないことは言うまでもない。当業者であれば、特許請求の範囲に記載された範疇内において、各種の変更例又、は修正例に想到し得ることは明らかであり、それらについても当然に本発明の技術的範囲に属するものと了解される。
【0156】
なお、第2の実施形態のリーダ5B(図11参照)は、無線端末(タグ5B)にパルス信号を送信する無線測距装置であって、無線端末(タグ5B)から送信された折り返しパルス信号を検波する検波部12と、検波部12により出力された検波信号を基に、無線端末(タグ8B)の識別情報を検出するタグID検出部19と、タグID検出部19が無線端末(タグ8B)の識別情報を検出しない場合、パルス信号の送信を中断する送信パルスパターン生成部39と、を備える。また、送信パルスパターン生成部39は、パルス信号の送信を所定時間中断した後、パルス信号の送信を再開する。
【0157】
なお、第3の実施形態のリーダ5C(図17参照)は、無線端末(タグ5C)にパルス信号を送信する無線測距装置であって、無線端末(タグ5C)から送信された折り返しパルス信号を検波する検波部12と、検波部12により出力された検波信号を基に、無線端末(タグ8C)の識別情報を検出するタグID検出部19と、タグID検出部19が無線端末(タグ8C)の識別情報を検出しない場合、パルス信号の送信を中断する送信パルスパターン生成部39と、を備える。また、送信パルスパターン生成部39は、パルス信号の送信間隔を、例えば複数の異なる所定の送信期間の中から周期的に切り替える。
【産業上の利用可能性】
【0158】
本発明は、無線測距装置および無線端末間の距離を測定する場合、無線測距装置が適切な利得によって折り返しパルスを受信し、正確に測距でき、有用である。
【符号の説明】
【0159】
5、5A、5B、5C リーダ
8、8B、8C タグ
11 受信アンテナ
12 検波器
13、35、36 可変利得増幅器
15 コンパレータ
17 フリップフロップ
19 タグID検出部
21 測距部
25 リーダ制御部
26、27 送信アンテナ
37 UWBパルス生成部
37a、39a 信号線
39、39A 送信パルスパターン生成部
41 受信ゲイン制御部
42 自折り返しパルスレベル制御部
43 送信パワー制御部
46 送信タイマ
51 受信アンテナ
53 検波器
56 タグID付加部
57、57A 受信レベル判定部
59、59A 折り返し制御部
61 送信アンテナ
67 タイマ制御部
【特許請求の範囲】
【請求項1】
無線端末にパルス信号を送信する無線測距装置であって、
前記無線端末から送信された折り返しパルス信号を検波する検波部と、
前記検波部から出力された検波信号を増幅する増幅部と、
前記送信されるパルス信号の送信レベルを可変する送信レベル制御部と、
前記検波信号を増幅するための利得を可変する受信ゲイン制御部と、
前記送信されるパルス信号の送信レベル及び前記利得の大きさの組合せを周期的に切り替えるリーダ制御部と、
前記増幅されたパルス信号を基に、前記無線端末の識別情報を検出するタグID検出部と、
前記パルス信号の送信タイミングから、前記タグID検出部によって前記識別情報が検出されたパルス信号の受信タイミングまでの時間差を基に、前記無線端末との距離を測距する測距部と、を備える無線測距装置。
【請求項2】
請求項1に記載の無線測距装置であって、
前記無線測距装置に向けた自折り返しパルスの送信レベルを可変する自折り返しパルスレベル制御部と、を更に備え、
前記パルス信号と同時に送信される前記自折り返しパルス信号の受信タイミングを、前記パルス信号の送信タイミングとし、
前記リーダ制御部は、前記パルスの送信レベル、前記利得、及び前記自折り返しパルスの送信レベルの大きさの組合せを切り替える無線測距装置。
【請求項3】
無線測距装置から送信されたパルス信号を受信する無線端末であって、
前記受信された前記パルス信号を検波する検波部と、
前記検波部から出力された検波信号のレベルを判定する受信レベル判定部と、
前記検波信号のレベルが所定の範囲にある場合、前記無線測距装置から送信された前記パルス信号に対する折り返しパルス信号の送信を制御する折り返し制御部と、を備える無線端末。
【請求項4】
請求項3に記載の無線端末であって、
前記折り返し制御部は、前記受信レベル判定部により判定された前記検波信号のレベルを基に、前記無線測距装置からの前記パルス信号の送信の中断の再開後に、前記折り返しパルス信号を送信するための待ち時間を設定する無線端末。
【請求項5】
請求項3に記載の無線端末であって、
前記受信レベル判定部は、前記検波部から出力された検波信号のレベルと、前記無線測距装置から送信された前記パルス信号の受信間隔とが所定の条件を満足するか否かを判定し、
前記折り返し制御部は、前記受信レベル判定部の判定結果を基に、前記折り返しパルス信号の送信を決定する無線端末。
【請求項6】
請求項5に記載の無線端末であって、
前記所定の条件は、前記受信レベルが低いほど前記パルス信号の送信周期が長く設定された前記受信レベルの範囲及び受信間隔である無線測距システム。
【請求項7】
請求項5又は6に記載の無線端末であって、
前記折り返し制御部は、前記検波信号のレベルと前記パルス信号の受信間隔とが前記所定の条件を満足しないと判断される期間において、前記送信パルスを受信しない状態に移行する無線端末。
【請求項8】
無線端末にパルス信号を送信する無線測距装置と、前記無線測距装置から送信されたパルス信号を受信する無線端末とを含む無線測距システムであって、
前記無線測距装置は、
前記無線端末から送信された折り返しパルス信号を検波する第1検波部と、
前記第1検波部から出力された検波信号を増幅する増幅部と、
前記送信されるパルス信号の送信レベルを可変する送信レベル制御部と、
前記検波信号を増幅するための利得を可変する受信ゲイン制御部と、
前記送信されるパルス信号の送信レベル及び前記利得の大きさの組合せを周期的に切り替えるリーダ制御部と、
前記増幅されたパルス信号を基に、前記無線端末の識別情報を検出するタグID検出部と、
前記パルス信号の送信タイミングから、前記タグID検出部によって識別情報が検出されたパルス信号の受信タイミングまでの時間差を基に、前記無線端末との距離を測距する測距部と、を備え、
前記無線端末は、
前記受信された前記パルス信号を検波する第2検波部と、
前記第2検波部から出力された検波信号のレベルを判定する受信レベル判定部と、
前記検波信号のレベルが所定の範囲にある場合、前記無線測距装置から送信された前記パルス信号に対する折り返しパルス信号の送信を制御する折り返し制御部と、を備える無線測距システム。
【請求項1】
無線端末にパルス信号を送信する無線測距装置であって、
前記無線端末から送信された折り返しパルス信号を検波する検波部と、
前記検波部から出力された検波信号を増幅する増幅部と、
前記送信されるパルス信号の送信レベルを可変する送信レベル制御部と、
前記検波信号を増幅するための利得を可変する受信ゲイン制御部と、
前記送信されるパルス信号の送信レベル及び前記利得の大きさの組合せを周期的に切り替えるリーダ制御部と、
前記増幅されたパルス信号を基に、前記無線端末の識別情報を検出するタグID検出部と、
前記パルス信号の送信タイミングから、前記タグID検出部によって前記識別情報が検出されたパルス信号の受信タイミングまでの時間差を基に、前記無線端末との距離を測距する測距部と、を備える無線測距装置。
【請求項2】
請求項1に記載の無線測距装置であって、
前記無線測距装置に向けた自折り返しパルスの送信レベルを可変する自折り返しパルスレベル制御部と、を更に備え、
前記パルス信号と同時に送信される前記自折り返しパルス信号の受信タイミングを、前記パルス信号の送信タイミングとし、
前記リーダ制御部は、前記パルスの送信レベル、前記利得、及び前記自折り返しパルスの送信レベルの大きさの組合せを切り替える無線測距装置。
【請求項3】
無線測距装置から送信されたパルス信号を受信する無線端末であって、
前記受信された前記パルス信号を検波する検波部と、
前記検波部から出力された検波信号のレベルを判定する受信レベル判定部と、
前記検波信号のレベルが所定の範囲にある場合、前記無線測距装置から送信された前記パルス信号に対する折り返しパルス信号の送信を制御する折り返し制御部と、を備える無線端末。
【請求項4】
請求項3に記載の無線端末であって、
前記折り返し制御部は、前記受信レベル判定部により判定された前記検波信号のレベルを基に、前記無線測距装置からの前記パルス信号の送信の中断の再開後に、前記折り返しパルス信号を送信するための待ち時間を設定する無線端末。
【請求項5】
請求項3に記載の無線端末であって、
前記受信レベル判定部は、前記検波部から出力された検波信号のレベルと、前記無線測距装置から送信された前記パルス信号の受信間隔とが所定の条件を満足するか否かを判定し、
前記折り返し制御部は、前記受信レベル判定部の判定結果を基に、前記折り返しパルス信号の送信を決定する無線端末。
【請求項6】
請求項5に記載の無線端末であって、
前記所定の条件は、前記受信レベルが低いほど前記パルス信号の送信周期が長く設定された前記受信レベルの範囲及び受信間隔である無線測距システム。
【請求項7】
請求項5又は6に記載の無線端末であって、
前記折り返し制御部は、前記検波信号のレベルと前記パルス信号の受信間隔とが前記所定の条件を満足しないと判断される期間において、前記送信パルスを受信しない状態に移行する無線端末。
【請求項8】
無線端末にパルス信号を送信する無線測距装置と、前記無線測距装置から送信されたパルス信号を受信する無線端末とを含む無線測距システムであって、
前記無線測距装置は、
前記無線端末から送信された折り返しパルス信号を検波する第1検波部と、
前記第1検波部から出力された検波信号を増幅する増幅部と、
前記送信されるパルス信号の送信レベルを可変する送信レベル制御部と、
前記検波信号を増幅するための利得を可変する受信ゲイン制御部と、
前記送信されるパルス信号の送信レベル及び前記利得の大きさの組合せを周期的に切り替えるリーダ制御部と、
前記増幅されたパルス信号を基に、前記無線端末の識別情報を検出するタグID検出部と、
前記パルス信号の送信タイミングから、前記タグID検出部によって識別情報が検出されたパルス信号の受信タイミングまでの時間差を基に、前記無線端末との距離を測距する測距部と、を備え、
前記無線端末は、
前記受信された前記パルス信号を検波する第2検波部と、
前記第2検波部から出力された検波信号のレベルを判定する受信レベル判定部と、
前記検波信号のレベルが所定の範囲にある場合、前記無線測距装置から送信された前記パルス信号に対する折り返しパルス信号の送信を制御する折り返し制御部と、を備える無線測距システム。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】

【図7】

【図8】
【図9】
【図10】
【図11】
【図12】

【図13】
【図14】
【図15】
【図16】
【図17】

【図18】
【図19】
【図20】

【図21】
【図22】
【図23】
【図24】
【図25】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【図25】
【公開番号】特開2013−24658(P2013−24658A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−158248(P2011−158248)
【出願日】平成23年7月19日(2011.7.19)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月19日(2011.7.19)
【出願人】(000005821)パナソニック株式会社 (73,050)
【Fターム(参考)】
[ Back to top ]