
無線端末における位置推定方法、無線端末及び位置推定プログラム
【課題】測位電波を受信することができない環境にあっても、無線端末が相互に通信することで位置情報を推定すると共に、その位置情報の精度を高めることができる無線端末の位置推定方法、無線端末及び位置推定プログラムを提供する。
【解決手段】複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、無線端末は、自無線端末の位置情報と位置情報の精度を高い順に規定したレベルとを保持し、通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から他無線端末までの推定距離を算出し、その推定距離に基づいて推定位置情報を算出する第3のステップとを有する。
【解決手段】複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、無線端末は、自無線端末の位置情報と位置情報の精度を高い順に規定したレベルとを保持し、通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から他無線端末までの推定距離を算出し、その推定距離に基づいて推定位置情報を算出する第3のステップとを有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法、無線端末及び位置推定プログラムに関する。
【背景技術】
【0002】
無線端末の測位技術として、GPS(Global Positioning System)衛星から送信される測位電波が広く利用されている。この技術によれば、無線端末は、測位電波を受信することによって当該衛星からの距離を算出する。4機以上のGPS衛星からの測位電波を受信することによって、10m程度の精度で位置を測定することができる。一方、無線端末が、3機以下のGPS衛星からの測位電波しか受信できなかった場合、又は、受信した測位電波を送信する衛星との仰角が仰角マスク以下である場合には、測位の精度は大きく劣化する。
【0003】
これに対し、屋内のように、GPS衛星からの測位電波が遮断される場所に位置する無線端末については、RFID(Radio Frequency IDentifier)タグを用いて位置を推定する技術や、複数のカメラによって撮影された画像に基づいて位置を推定する技術もある。
【0004】
例えば、屋内に、測位電波を送信する複数の測位基準装置を設置し、その測位基準装置と無線端末との間の距離を、その伝播特性を用いて推定する技術もある(例えば特許文献1及び非特許文献1参照)。この技術によれば、サーバが、測位基準装置の位置情報と、無線端末によって推定された距離とを用いて、その無線端末の位置情報を算出する。
【0005】
一方、センサネットワークを用いて無線端末の位置を推定する技術もある(例えば非特許文献2参照)。この技術によれば、無線端末が、他無線端末から位置情報を取得し、無線端末間の距離を伝播受信強度に基づいて推定する。その位置情報及び距離を用いて、その無線端末の位置を算出する。この技術によれば、インフラストラクチャとして、多数の測位基準装置を配置する必要がない。
【0006】
【特許文献1】特開2004−53510号公報
【非特許文献1】日立製作所ワイヤレスインフォベンチャーカンパニー、「日立AirSenseTM UWBエントリーモデル」、2007年12月10日、[online]、[平成20年11月1日検索]、インターネット<URL:http://www.hitachi.co.jp/New/cnews/month/2007/12/1210a.html>
【非特許文献2】Bo Liu、「A Study on Wireless Sensor NetworksLocation”、 Wireless Communications」、 Networking and Mobile Computing、 2006年、WiCOM2006、[online]、[平成20年11月1日検索]、インターネット<URL:http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=4149451>
【発明の開示】
【発明が解決しようとする課題】
【0007】
特許文献1及び非特許文献1に記載された技術によれば、無線端末自体が、GPS衛星又は測位基準装置からの測位電波を用いて測位するために、測位可能なエリアを広げるには、多数の測位基準装置が必要となる。
【0008】
一方で、自無線端末が、他無線端末の位置情報及びその距離に基づいて位置情報を推定する技術もある。しかしながら、位置情報が、他無線端末の位置情報及び距離の精度が低い場合もあり、その場合、自無線端末によって算出される位置情報自体の精度も低くなる。この技術によれば、無線端末の位置情報の信頼度が、指数関数的に低下する可能性が強い。
【0009】
これに対し、非特許文献2に記載の技術によれば、「重み」の概念を導入している。即ち、一般的なGPSシステムと同等の位置推定アルゴリズムを用いるものの、「近距離に位置する無線端末間における距離の推定は、より正確である」との前提条件から、推定距離の誤差に対して重み付けをする。具体的には、各無線端末の位置情報の信頼度と、距離情報の信頼度とに基づいて重み付けをする。電波受信強度が高いほど、距離情報の信頼度も高いと仮定する。距離情報の信頼度を、隣接無線端末の位置情報の信頼度に乗算することによって、自無線端末の位置情報の信頼度を算出する。
【0010】
しかしながら、現実的には、近距離であってもマルチパスやフェージングなどが存在する環境下では、「近距離に位置する無線端末間における距離の推定は、より正確である」との前提に基づいて算出された「重み」は、より誤差が増加させる可能性がある。従って、自無線端末は、他無線端末の位置情報の精度を判断し、その位置情報を自無線端末の位置推定に使用するか否かを取捨選択することが重要となる。
【0011】
そこで、本発明は、測位電波を受信することができない環境にあっても、無線端末が相互に通信することで位置情報を推定すると共に、その位置情報の精度を高めることができる無線端末の位置推定方法、無線端末及び位置推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明によれば、複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、
無線端末は、自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを保持し、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、
他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、
自無線端末のレベルが他無線端末のレベルより低い場合、受信電波に基づいて、自無線端末から他無線端末までの推定距離を算出する第3のステップと、
他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する第4のステップと、
を有することを特徴とする。
【0013】
本発明の位置推定方法における他の実施形態によれば、他無線端末のレベル及び推定距離に基づいて自無線端末のレベルを算出し、該レベルを自無線端末のレベルとして更新するする第5のステップを更に有することも好ましい。
【0014】
本発明の位置推定方法における他の実施形態によれば、他無線端末の位置情報と自無線端末の位置情報とを直線上に結ぶ距離Dを算出し、該距離Dと第3のステップで算出された推定距離D’との差分が、所定閾値以上である場合、直線上における他無線端末からの推定距離D’に対応する位置情報を用いて、自無線端末の位置情報を更新する第6のステップを更に有することも好ましい。
【0015】
本発明の位置推定方法における他の実施形態によれば、第3のステップについて、推定距離は、他無線端末からの受信電波の伝播損失又は到達時間に基づいて推定されることも好ましい。
【0016】
本発明の位置推定方法における他の実施形態によれば、
無線端末は、測位電波を受信可能であって、
第1のステップの前段について、無線端末は、測位電波を受信し且つ自無線端末の位置情報を取得可能か否かを判定し、取得できない場合に第1のステップへ移行することも好ましい。
【0017】
本発明の位置推定方法における他の実施形態によれば、
GPS(Global
Positioning System)衛星からの測位電波である場合、捕捉したGPS衛星の数及び仰角に基づいてレベルを算出し、又は、
自装置の位置情報を放送する測位装置からの測位電波である場合、該測位装置との間の推定距離に基づいてレベルを算出することも好ましい。
【0018】
本発明の位置推定方法における他の実施形態によれば、第2のステップについて、自無線端末のレベルが他無線端末のレベルより高い場合は、処理を終了することも好ましい。
【0019】
本発明によれば、無線リンクを介して相互接続するネットワークシステムにおける無線端末であって、
自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを記憶する記憶手段と、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、該無線端末の位置情報及びレベルを取得する他端末探索手段と、
他無線端末のレベルと自無線端末のレベルとを比較するレベル比較手段と、
自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から探索した無線端末までの推定距離を算出する距離推定手段と、
他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する位置情報推定手段と
を有することを特徴とする。
【0020】
本発明によれば、無線リンクを介して相互接続するネットワークシステムにおける無線端末に搭載されたコンピュータを機能させる位置推定プログラムにおいて、
自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを記憶する記憶手段と、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、該無線端末の位置情報及びレベルを取得する他端末探索手段と、
他無線端末のレベルと自無線端末のレベルとを比較するレベル比較手段と、
自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から探索した無線端末までの推定距離を算出する距離推定手段と、
他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する位置情報推定手段と
してコンピュータを機能させることを特徴とする。
【発明の効果】
【0021】
本発明の位置推定方法、無線端末及び位置推定プログラムによれば、測位電波を受信することができない環境にあっても、無線端末が相互に通信する際に、精度の高い位置情報のみを用いて当該無線端末の位置情報を推定するために、その位置情報の精度を高めることができる。
【発明を実施するための最良の形態】
【0022】
以下では、図面を用いて、本発明を実施するための最良の形態について詳細に説明する。
【0023】
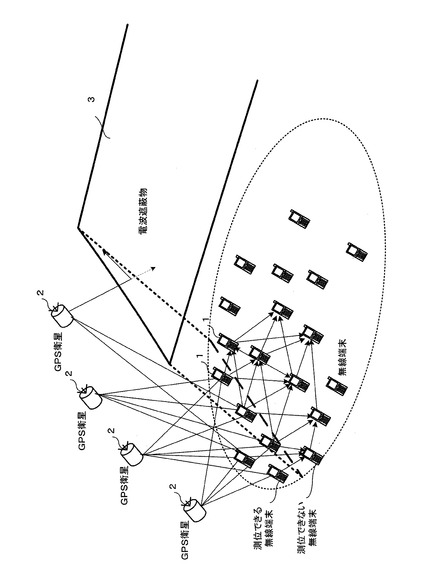
図1は、本発明におけるシステム構成図である。
【0024】
図1のネットワークシステムによれば、複数の無線端末1が、無線リンクを介して相互に通信可能である。また、無線端末1は、例えばGPS衛星からの測位電波を受信することによって、その位置情報を取得することができる。
【0025】
ここで、複数の無線端末1の一部は、電波遮蔽物3によって測位電波を受信することができない場合がある。具体的には、屋内や地下街など、外部から電波が到達しにくい場所を想定している。従って、図1によれば、測位可能な第1の無線端末の群と、測位不可能な第2の無線端末の群とに区別される。
【0026】
測位不可能な第2の無線端末は、測位電波は受信できなくても、測位可能な第1の無線端末と通信することができる場合がある。このとき、第2の無線端末は、第1の無線端末からその位置情報を取得することができる。また、第2の無線端末は、第1の無線端末からの受信電波の無線品質(例えば受信レベル)によって、第1の無線端末との間の距離を推定することできる。第1の無線端末の位置情報と、それら無線端末間の推定距離とを用いて、第2の無線端末自身がその位置情報を推定することができる。
【0027】
これによって、測位電波を受信することができない第2の無線端末であっても、位置情報を推定することができる。その後、更なる測位電波を受信できない他無線端末は、位置情報を推定し且つ保持した第2の無線端末と通信することによって、位置情報を推定することができる。このように、無線端末は、自律分散的に他の無線端末と相互通信することによって、最終的には、ネットワークシステム全体の無線端末が、自らの位置情報を推定することができる。
【0028】
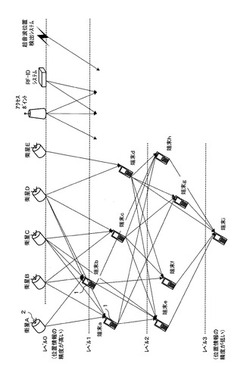
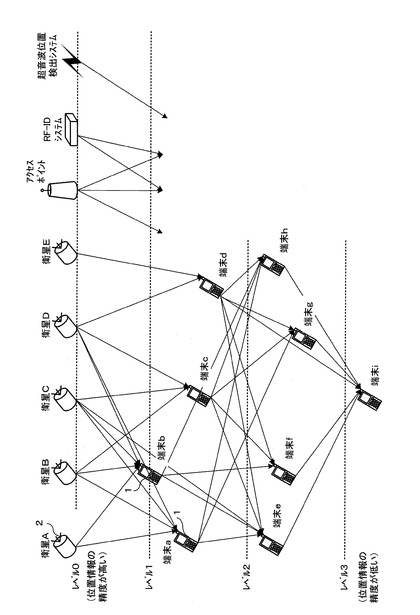
図2は、無線端末の位置情報に対するレベルを表す説明図である。
【0029】
図2によれば、縦方向に、位置情報のレベルが表されている。これは、物理的な位置関係を表すものではない。各無線端末が保持する位置情報には、その精度を表すレベルが対応付けられている。
【0030】
位置情報の「レベル」は、最高精度をレベル0とし、順に低いもの(レベル1,2,3・・・)にされる。このレベルによって、各無線端末が保持する位置情報における精度の高低を、比較することができる。本発明によれば、無線端末は、他無線端末から受信した位置情報のレベルが、当該自無線端末が保持する位置情報のレベルよりも低い場合、他無線端末の位置情報を用いて位置情報を更新しないようにする。
【0031】
次に、レベル付けの基準について説明する。GPS衛星の位置情報は、現在利用できる最高精度のものであって、レベル0と規定される。次に、そのGPS衛星からの測位電波を受信した無線端末における位置情報は、レベル1と規定される。
【0032】
尚、無線端末が、GPS衛星からの測位電波を直接的に受信することができる場合であっても、その捕捉する衛星の数、仰角、無線端末の時刻精度、仰角マスク等の要因に応じて、その無線端末の位置情報の精度は変化する。それら要因に応じて、無線端末のレベルは、レベル1から2までの間で変化する。また、GPS衛星が捕捉できず且つレベルが0より低い無線端末の位置情報を用いて推定した無線端末の位置情報は、レベル2よりも低いレベルが割り当てられる。レベルが2よりも低い無線端末の位置情報を用いて推定した無線端末の位置情報は、レベル3よりも低いレベルが割り当てられる。
【0033】
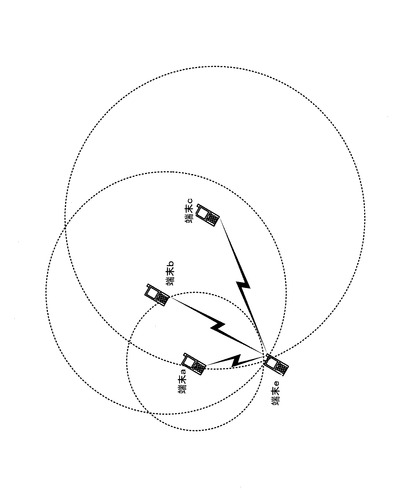
図2によれば、GPS衛星A〜Eは、レベル0と規定される。
無線端末bは、GPS衛星A、B、C及びDを空間的に十分なばらつきをもって捕捉している。そのために、精度良く位置情報を得ることが可能であり、「レベル1」と規定される。
無線端末aは、無線端末bと同じ衛星を捕捉しているものの、衛星との仰角が小さい。そのために、無線端末bほどの精度が取れず、例えば「1.2」と規定される。
無線端末cは、GPS衛星B、C及びDを捕捉可能であるが、衛星A及びEを捕捉できない。そのために、更に劣化して「1.5」と規定される。
無線端末dは、GPS衛星D及びEの2つの衛星しか捕捉できない。そのために、位置情報の精度は、更に劣化した「1.7」と規定される。
無線端末eは、GPS衛星を捕捉できないが、無線端末a、b、c及びdを捕捉している。無線端末eは、これら無線端末の劣化したレベルの位置情報に基づいて、位置情報を推定するために、そのレベルは更に劣化し、例えば「2.2」と規定される。
以下、無線端末f〜iが、同様にしてレベル付けされる。
【0034】
このように、他無線端末から位置情報の精度と、自無線端末の位置情報の精度とは、比較可能となる。例えば、端末bと端末gとは、当初、直接的に通信可能ではないが、移動によって通信可能となった場合、端末b及び端末gとの間でレベルを比較することができる。
【0035】
尚、図2によれば、レベル0に、GPS衛星の他、既知の位置情報を持つ固定のアクセスポイント、RFIDシステム及び超音波位置検知システムも設置されている。勿論、映像を用いて無線端末の位置を測定する装置であってもよい。このように、異なる種類の位置情報配信システムが混在する場合であっても、位置情報の精度を「レベル」として扱うことができる。
【0036】
また、国土地理院などから提供される位置情報のデータベースは、十分に信頼度が高いため、この位置情報は、GPS衛星と同様にレベル0と規定できる。位置推定システム毎に異なるレベルを規定することによって、異なる測位装置であっても統合的な運用を容易にする。
【0037】
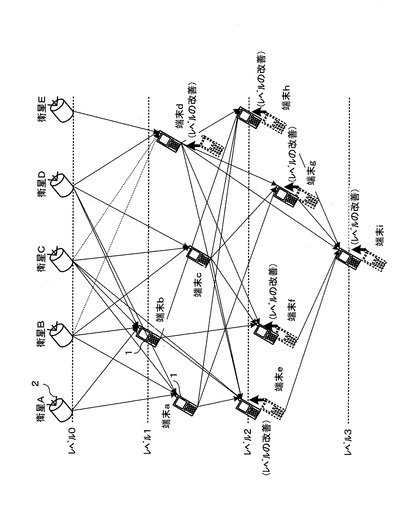
図3は、図2における位置情報のレベルの改善を表す説明図である。
【0038】
図3によれば、無線端末dは、これまで捕捉していたGPS衛星D及びE(図2参照)に加えて、新たに衛星B及びCを捕捉したとする。無線端末dは、GPS衛星を4機捕捉することとなる。これによって、無線端末dが保持する位置情報のレベルは、改善(向上)する。
【0039】
無線端末dの位置情報のレベルが向上した場合、その無線端末dからの受信電波によって位置情報を推定していた無線端末e〜hについても、その位置情報のレベルが向上する。更に、無線端末e〜hからの受信電波によって位置情報を推定していた無線端末iについても、その位置情報のレベルが向上する。
【0040】
図4は、無線端末における位置推定方法を表すフローチャートである。図5は、本発明を用いて推定される位置情報の説明図である。
【0041】
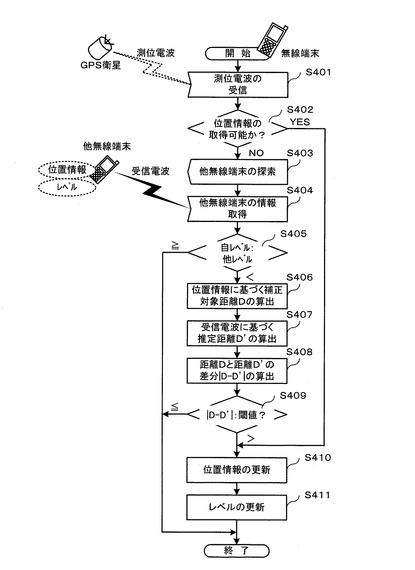
図4によれば、無線端末は、自無線端末の位置情報と、その位置情報の精度を高い順に規定したレベルとを保持する。
【0042】
(S401)無線端末は、GPS衛星から測位電波を受信する。
(S402)次に、無線端末は、測位電波に基づいて、位置情報を取得可能か否か判定する。取得可能な場合は、S410へ移行する。
(S403)測位電波に基づいて自無線端末の位置情報を取得できない場合、無線端末は、無線リンクを介して通信可能な他無線端末を探索する。
(S404)無線端末は、無線リンクを介して通信可能な他無線端末から、位置情報及びレベルを取得する。
(S405)ここで、無線端末は、他無線端末のレベルと、自無線端末のレベルとを比較する。自無線端末のレベルが、他無線端末のレベル以上である場合、そのまま処理を終了する。
【0043】
レベルは、前述したように位置情報の精度を規定している。従って、最高精度を0とし、精度が劣化するのに応じて順次大きな数値で規定される。S405の比較によって、自無線端末のレベルが、他無線端末のレベル以上である場合、その他無線端末の位置情報を用いて、自無線端末の位置情報の更新を実行しない。これによって、位置情報の精度の劣化を防止することができる。
【0044】
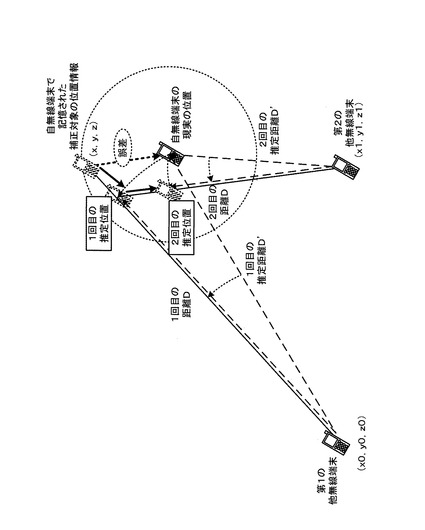
(S406)一方、自無線端末のレベルが、他無線端末のレベルよりも低い場合、無線端末は、自無線端末の位置情報と、他無線端末の位置情報とを直線上に結ぶ補正対象距離Dを算出する。図5によれば、補正対象の位置情報(x,y,z)と、第1の他無線端末の位置情報(x0,y0,z0)とを直線上に結ぶ補正対象距離Dが表されている。
【0045】
(S407)次に、無線端末は、他無線端末からの受信電波に基づいて、他無線端末との間の推定距離D’を導出する。推定距離D’は、例えば受信電波強度に基づいて導出される。図5によれば、現実の位置の無線端末は、第1の他無線端末から受信した受信電波に基づいて、推定距離D’を導出する。
【0046】
(S408)無線端末は、補正対象距離Dと、推定距離D’との差分の絶対値|D−D’|を算出する。
(S409)次に、無線端末は、その差分|D−D’|と所定閾値とを比較する。差分|D−D’|が、所定閾値以下である場合、そのまま処理を終了する。所定閾値で比較することによって、補正対象距離Dと推定距離D’との差分が小さい場合にも、頻繁に位置情報を更新することを避けることができる。
【0047】
(S410)一方、差分|D−D’|が所定閾値よりも大きい場合、無線端末は、位置情報を更新する。幾何学的には、最初に、他無線端末の位置情報と自無線端末の位置情報とを結ぶ直線を算出し、その距離を補正対象距離Dとする。そして、他無線端末の位置情報を基点として、その直線上で、推定距離D’に対応する位置を決定する。その推定距離D’に対応する座標点を、新たに推定された位置情報となる。図5によれば、補正対象の位置情報と第1の他無線端末とを結ぶ直線上で、推定距離D’の位置を、1回目の推定位置とする。
【0048】
(S411)無線端末は、自無線端末の位置情報の精度を規定するレベルを、他無線端末の位置情報のレベル及び推定距離D’等に基づいて算出する。例えば、推定距離D’が長くなるほど、レベル自体は、低く設定される。無線端末は、新たに設定されたレベルを用いて、保持する位置情報のレベルを更新する。
【0049】
図5によれば、無線端末は、1回目の推定位置から、更に第2の他無線端末からの受信電波によって、位置を補正する。1回目の推定位置と、第2の他無線端末の位置情報(x1,y1,z1)とを直線上に結ぶ補正対象距離Dが表されている。次に、現実の位置の無線端末は、第2の他無線端末から受信した受信電波に基づいて、推定距離D’を導出する。そして、第1の推定位置と第2の他無線端末とを結ぶ直線上で、推定距離D’の位置を、2回目の推定位置とする。
【0050】
図6は、本実施形態の無線端末の機能構成図である。
【0051】
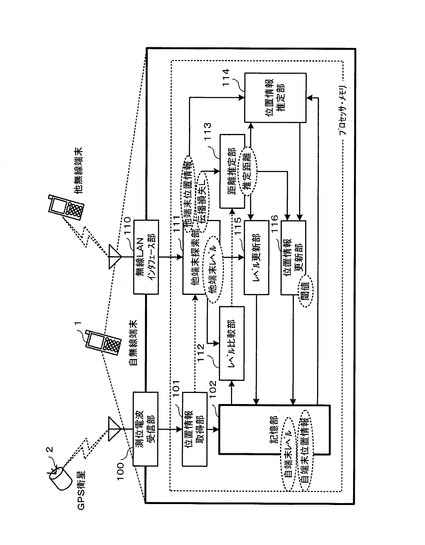
図6によれば、無線端末1は、測位電波受信部100と、無線LANインタフェース部110とを有する。測位電波受信部100は、GPS衛星2からの測位電波を受信する。捕捉できたGPS衛星からの情報は、位置情報取得部101へ出力される。また、無線LANインタフェース部110は、無線リンクを介して他無線端末と通信する。例えば、アドホックネットワークプロトコルの機能も有する。
【0052】
また、無線端末1は、位置情報取得部101と、記憶部102と、他端末探索部111と、レベル比較部112と、距離推定部113と、位置情報推定部114と、レベル更新部115と、位置情報更新部116とを有する。これら機能構成部は、無線端末に搭載されたコンピュータによって実行される位置推定プログラムによって実現される。
【0053】
位置情報取得部101は、測位電波受信部100から測位電波の情報を受け取り、位置情報を取得可能か否かを判定する。位置情報を取得可能か否かは、捕捉できたGPS衛星の数や仰角等の情報に応じて判定される。取得できた自無線端末の位置情報は、記憶部102へ出力される。また、捕捉できたGPS衛星の数や仰角等の情報に応じて算出した、その位置情報のレベルも、記憶部102へ出力する。
【0054】
記憶部102は、自無線端末の位置情報及びレベルを記憶する。自無線端末の位置情報は、位置情報推定部114へ出力され、自無線端末のレベルは、レベル比較部112へ出力される。
【0055】
他端末探索部111は、位置情報取得部101によって測位電波から位置情報を取得できない場合に実行される。他端末探索部111は、無線LANインタフェース部110を介して他無線端末を探索し、他無線端末から位置情報及びレベルを受信する。他無線端末の位置情報は、位置情報推定部114へ出力され、他無線端末のレベルは、レベル比較部112及びレベル更新部115へ出力される。また。他端末探索部111は、他無線端末からの電波の受信レベルを計測し、その受信レベルから他無線端末と自無線端末間の伝播損失L(又は遅延時間)を計測する。その伝播損失Lは、距離推定部113へ出力される。
【0056】
尚、他端末探索部111は、タイマによって、周期的に周辺の他無線端末を探索することも好ましい。また、探索に必要な時間は、周辺の伝播環境等に応じて適応的に決定されるものであってもよいし、予め決定した一定時間であってもよい。
【0057】
レベル比較部112は、他無線端末のレベルと、記憶部102に保持する自無線端末のレベルとを比較する。自無線端末のレベルが他無線端末のレベルよりも低い場合、推定許可が、距離推定部113へ通知される。自無線端末のレベルが他無線端末のレベル以上である場合、距離推定部113は実行されない。
【0058】
距離推定部113は、レベル比較部112から推定許可の通知を受けた場合、他端末探索部111から出力される伝播損失Lに基づいて、他無線端末から自無線端末までの推定距離を算出する。端末間の距離dと伝播損失Lとの関係は、次式(1)で表される。
L=10log10(4πd/λ) 式(1)
ここで、Lは伝播損失であり、dは距離であり、λは使用電波の波長であり、πは円周率である。尚、伝播損失に代えて、遅延時間を用いるものであってもよい。
【0059】
距離推定部113は、具体的には、他端末探索部111で計測された伝播損失Lから、式(1)の逆関数である次式(2)を用いて距離dを算出する。
d=(λ/4π)exp((L(loge10)/10) 式(2)
この推定された距離d(以下「推定距離D’」と表示する)は、位置情報推定部114、レベル更新部115及び位置情報更新部116へ出力される。尚、伝播損失Lは、マルチパスやフェージングなどの周辺環境によって大きく変動するため、例えば一定時間程度の観測をして、その変動を抑制することも好ましい。
【0060】
位置情報推定部114は、他端末探索部111から他無線端末の位置情報を入力し、距離推定部113から推定距離D’を入力し、記憶部102から自無線端末の位置情報を入力する。ここで、他無線端末の位置情報(x0,y0,z0)と、自無線端末の位置情報(x,y,z)とが結ばれた直線上における補正対象距離Dを、次式(3)によって算出する。
D=√((x−x0)2+(y−y0)2+(z−z0)2) 式(3)
【0061】
次に、位置情報推定部114は、自無線端末の新たな推定位置(x’,y’,z’)を、他無線端末の位置(x0,y0,z0)から推定距離D’だけ離れたこの直線上における位置として算出する。即ち、次式(4)に基づいて、自無線端末の新たな推定位置(x’,y’,z’)を算出する。
x’−x0=(x−x0)D’/D
y’−y0=(y−y0)D’/D 式(4)
z’−z0=(z−z0)D’/D
自無線端末の新たな推定位置(x’,y’,z’)は、記憶部102へ出力される。
【0062】
レベル更新部115は、位置推定に用いた他無線端末のレベル及び推定距離に基づいて、自無線端末のレベルを更新する。自無線端末のレベルは、先ず、位置推定に用いた他無線端末のレベルに依存する。また、レベルは、距離推定による誤差を加えて、更に劣化する。距離推定による誤差は、その距離が大きいほど誤差も大きくなるために、推定距離が長くなるに応じてレベルが低下するように算出される。
【0063】
位置情報更新部116は、位置情報推定部114で算出された推定位置情報(x’,y’,z’)を用いて、自無線端末が保持する位置情報(x,y,z)を更新する。ここでは、上式(3)の距離Dと推定距離D’との差分の絶対値|D−D’|を計算する。そして、所定閾値と差分|D−D’|を比較する。所定閾値より差分が大きい場合には、新たに推定された位置情報(x’、y’、z’)を用いて位置情報(x,y,z)を更新する。
【0064】
図7は、三角測量に基づく位置情報の推定を表す説明図である。
【0065】
本発明によれば、自無線端末が、誤差を含むかもしれない位置情報を、記憶部に予め保持しておくことを前提としている。従って、自無線端末が、初期動作の段階では何ら位置情報を保持していない。この場合、位置情報推定部114は、例えば従来技術に基づく「三角測量」の技術を用いることができる。「三角測量」とは、複数の他無線端末の位置を中心にした各推定距離D’の半径を有する複数の球面の交点として、位置情報を推定する。
【0066】
具体的には、無線端末は、自無線端末から無線リンクで通信可能な複数の他無線端末の探索が完了した後、予め定めておいた位置情報推定の条件を満たす場合に位置情報を算出する。この位置情報推定の条件として、例えば以下のような場合がある。
(1)捕捉した他無線端末の数が一定数以上になった場合
(2)自無線端末のレベル以上のレベルを持つ他無線端末が一定数以上存在する場合
(3)自無線端末の位置推定に未使用の他無線端末が一定数存在する場合
(4)累積した位置情報の誤差が閾値以上である場合
【0067】
ここでは、位置情報推定の条件として、捕捉した他無線端末の数が5以上の場合に位置情報を推定するとする。この場合は、捕捉した5つの無線端末からの位置情報(xi,yi,zi)(i=1から5)及びそれら他無線端末から自無線端末への伝播損失Li(i=1から5)から推定される距離di(i=1から5)に基づいて、式(5)で示される5つの式を得る。そして、これら5つの式を連立させて、位置情報(x、y、z)を得る。この位置情報(x、y、z)は、新たな推定位置情報(x’、y’、z’)そのものである。このようにして、一度、自無線端末の位置情報を獲得した後は、既述したように、式(5)によって自無線端末の新たな推定位置を算出できる。
(x−x1)2+(y−y1)2+(z−z1)2=d12
(x−x2)2+(y−y2)2+(z−z2)2=d22
(x−x3)2+(y−y3)2+(z−z3)2=d32 式(5)
(x−x4)2+(y−y4)2+(z−z4)2=d42
(x−x5)2+(y−y5)2+(z−z5)2=d52
【0068】
以上、詳細に説明したように、本発明の無線端末の位置推定方法、無線端末及び位置推定プログラムによれば、測位電波を受信することができない環境にあっても、無線端末が相互に通信する際に、精度の高い位置情報のみを用いて当該無線端末の位置情報を推定するために、その位置情報の精度を高めることができる。
【0069】
また、本発明によれば、各無線端末が、伝播環境に依存することなく、自律分散的に位置情報を推定することできる。特に、センサネットワークを展開した領域内における利用が見込まれる。例えば、屋内や地下環境でも、各無線端末が、電波伝播状態や温度、湿度など様々な情報をセンシングし、それらの情報と測定した位置情報をセットにして管理することができる。また、ネットワーク内のいくつかの基準となる測位電波送信装置に対して、正確な位置情報を随時入力することによって、ネットワークの全無線端末の位置情報の精度を継続して向上させることもできる。
【0070】
更に、本発明によれば、多数の測位電波送信装置をインフラストラクチャとして配置する必要がないために、低コストで位置情報の推定を実現することができる。更に、本発明によれば、測位電波送信装置の種別に応じて位置情報の精度を表すレベルを対応付けることもできる。更に、無線端末が保持する位置情報にはレベルが対応付けられており、そのレベルは、周辺の電波伝搬環境には依存しない位置情報の精度を表す。
【0071】
前述した本発明の種々の実施形態において、本発明の技術思想及び見地の範囲の種々の変更、修正及び省略は、当業者によれば容易に行うことができる。前述の説明はあくまで例であって、何ら制約しようとするものではない。本発明は、特許請求の範囲及びその均等物として限定するものにのみ制約される。
【図面の簡単な説明】
【0072】
【図1】本発明におけるシステム構成図である。
【図2】無線端末の位置情報に対するレベルを表す説明図である。
【図3】図2における位置情報のレベルの改善を表す説明図である。
【図4】無線端末における位置推定方法を表すフローチャートである。
【図5】本発明を用いて推定される位置情報の説明図である。
【図6】本発明における無線端末の機能構成図である。
【図7】三角測量に基づく位置情報の推定を表す説明図である。
【符号の説明】
【0073】
1 無線端末
100 測位電波受信部
101 位置情報取得部
102 記憶部
110 無線LANインタフェース部
111 他端末探索部
113 距離推定部
114 位置情報推定部
115 レベル更新部
116 位置情報更新部
2 GPS衛星、測位電波送信装置
3 電波遮蔽物
【技術分野】
【0001】
本発明は、複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法、無線端末及び位置推定プログラムに関する。
【背景技術】
【0002】
無線端末の測位技術として、GPS(Global Positioning System)衛星から送信される測位電波が広く利用されている。この技術によれば、無線端末は、測位電波を受信することによって当該衛星からの距離を算出する。4機以上のGPS衛星からの測位電波を受信することによって、10m程度の精度で位置を測定することができる。一方、無線端末が、3機以下のGPS衛星からの測位電波しか受信できなかった場合、又は、受信した測位電波を送信する衛星との仰角が仰角マスク以下である場合には、測位の精度は大きく劣化する。
【0003】
これに対し、屋内のように、GPS衛星からの測位電波が遮断される場所に位置する無線端末については、RFID(Radio Frequency IDentifier)タグを用いて位置を推定する技術や、複数のカメラによって撮影された画像に基づいて位置を推定する技術もある。
【0004】
例えば、屋内に、測位電波を送信する複数の測位基準装置を設置し、その測位基準装置と無線端末との間の距離を、その伝播特性を用いて推定する技術もある(例えば特許文献1及び非特許文献1参照)。この技術によれば、サーバが、測位基準装置の位置情報と、無線端末によって推定された距離とを用いて、その無線端末の位置情報を算出する。
【0005】
一方、センサネットワークを用いて無線端末の位置を推定する技術もある(例えば非特許文献2参照)。この技術によれば、無線端末が、他無線端末から位置情報を取得し、無線端末間の距離を伝播受信強度に基づいて推定する。その位置情報及び距離を用いて、その無線端末の位置を算出する。この技術によれば、インフラストラクチャとして、多数の測位基準装置を配置する必要がない。
【0006】
【特許文献1】特開2004−53510号公報
【非特許文献1】日立製作所ワイヤレスインフォベンチャーカンパニー、「日立AirSenseTM UWBエントリーモデル」、2007年12月10日、[online]、[平成20年11月1日検索]、インターネット<URL:http://www.hitachi.co.jp/New/cnews/month/2007/12/1210a.html>
【非特許文献2】Bo Liu、「A Study on Wireless Sensor NetworksLocation”、 Wireless Communications」、 Networking and Mobile Computing、 2006年、WiCOM2006、[online]、[平成20年11月1日検索]、インターネット<URL:http://ieeexplore.ieee.org/xpl/freeabs_all.jsp?arnumber=4149451>
【発明の開示】
【発明が解決しようとする課題】
【0007】
特許文献1及び非特許文献1に記載された技術によれば、無線端末自体が、GPS衛星又は測位基準装置からの測位電波を用いて測位するために、測位可能なエリアを広げるには、多数の測位基準装置が必要となる。
【0008】
一方で、自無線端末が、他無線端末の位置情報及びその距離に基づいて位置情報を推定する技術もある。しかしながら、位置情報が、他無線端末の位置情報及び距離の精度が低い場合もあり、その場合、自無線端末によって算出される位置情報自体の精度も低くなる。この技術によれば、無線端末の位置情報の信頼度が、指数関数的に低下する可能性が強い。
【0009】
これに対し、非特許文献2に記載の技術によれば、「重み」の概念を導入している。即ち、一般的なGPSシステムと同等の位置推定アルゴリズムを用いるものの、「近距離に位置する無線端末間における距離の推定は、より正確である」との前提条件から、推定距離の誤差に対して重み付けをする。具体的には、各無線端末の位置情報の信頼度と、距離情報の信頼度とに基づいて重み付けをする。電波受信強度が高いほど、距離情報の信頼度も高いと仮定する。距離情報の信頼度を、隣接無線端末の位置情報の信頼度に乗算することによって、自無線端末の位置情報の信頼度を算出する。
【0010】
しかしながら、現実的には、近距離であってもマルチパスやフェージングなどが存在する環境下では、「近距離に位置する無線端末間における距離の推定は、より正確である」との前提に基づいて算出された「重み」は、より誤差が増加させる可能性がある。従って、自無線端末は、他無線端末の位置情報の精度を判断し、その位置情報を自無線端末の位置推定に使用するか否かを取捨選択することが重要となる。
【0011】
そこで、本発明は、測位電波を受信することができない環境にあっても、無線端末が相互に通信することで位置情報を推定すると共に、その位置情報の精度を高めることができる無線端末の位置推定方法、無線端末及び位置推定プログラムを提供することを目的とする。
【課題を解決するための手段】
【0012】
本発明によれば、複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、
無線端末は、自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを保持し、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、
他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、
自無線端末のレベルが他無線端末のレベルより低い場合、受信電波に基づいて、自無線端末から他無線端末までの推定距離を算出する第3のステップと、
他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する第4のステップと、
を有することを特徴とする。
【0013】
本発明の位置推定方法における他の実施形態によれば、他無線端末のレベル及び推定距離に基づいて自無線端末のレベルを算出し、該レベルを自無線端末のレベルとして更新するする第5のステップを更に有することも好ましい。
【0014】
本発明の位置推定方法における他の実施形態によれば、他無線端末の位置情報と自無線端末の位置情報とを直線上に結ぶ距離Dを算出し、該距離Dと第3のステップで算出された推定距離D’との差分が、所定閾値以上である場合、直線上における他無線端末からの推定距離D’に対応する位置情報を用いて、自無線端末の位置情報を更新する第6のステップを更に有することも好ましい。
【0015】
本発明の位置推定方法における他の実施形態によれば、第3のステップについて、推定距離は、他無線端末からの受信電波の伝播損失又は到達時間に基づいて推定されることも好ましい。
【0016】
本発明の位置推定方法における他の実施形態によれば、
無線端末は、測位電波を受信可能であって、
第1のステップの前段について、無線端末は、測位電波を受信し且つ自無線端末の位置情報を取得可能か否かを判定し、取得できない場合に第1のステップへ移行することも好ましい。
【0017】
本発明の位置推定方法における他の実施形態によれば、
GPS(Global
Positioning System)衛星からの測位電波である場合、捕捉したGPS衛星の数及び仰角に基づいてレベルを算出し、又は、
自装置の位置情報を放送する測位装置からの測位電波である場合、該測位装置との間の推定距離に基づいてレベルを算出することも好ましい。
【0018】
本発明の位置推定方法における他の実施形態によれば、第2のステップについて、自無線端末のレベルが他無線端末のレベルより高い場合は、処理を終了することも好ましい。
【0019】
本発明によれば、無線リンクを介して相互接続するネットワークシステムにおける無線端末であって、
自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを記憶する記憶手段と、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、該無線端末の位置情報及びレベルを取得する他端末探索手段と、
他無線端末のレベルと自無線端末のレベルとを比較するレベル比較手段と、
自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から探索した無線端末までの推定距離を算出する距離推定手段と、
他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する位置情報推定手段と
を有することを特徴とする。
【0020】
本発明によれば、無線リンクを介して相互接続するネットワークシステムにおける無線端末に搭載されたコンピュータを機能させる位置推定プログラムにおいて、
自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを記憶する記憶手段と、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、該無線端末の位置情報及びレベルを取得する他端末探索手段と、
他無線端末のレベルと自無線端末のレベルとを比較するレベル比較手段と、
自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から探索した無線端末までの推定距離を算出する距離推定手段と、
他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する位置情報推定手段と
してコンピュータを機能させることを特徴とする。
【発明の効果】
【0021】
本発明の位置推定方法、無線端末及び位置推定プログラムによれば、測位電波を受信することができない環境にあっても、無線端末が相互に通信する際に、精度の高い位置情報のみを用いて当該無線端末の位置情報を推定するために、その位置情報の精度を高めることができる。
【発明を実施するための最良の形態】
【0022】
以下では、図面を用いて、本発明を実施するための最良の形態について詳細に説明する。
【0023】
図1は、本発明におけるシステム構成図である。
【0024】
図1のネットワークシステムによれば、複数の無線端末1が、無線リンクを介して相互に通信可能である。また、無線端末1は、例えばGPS衛星からの測位電波を受信することによって、その位置情報を取得することができる。
【0025】
ここで、複数の無線端末1の一部は、電波遮蔽物3によって測位電波を受信することができない場合がある。具体的には、屋内や地下街など、外部から電波が到達しにくい場所を想定している。従って、図1によれば、測位可能な第1の無線端末の群と、測位不可能な第2の無線端末の群とに区別される。
【0026】
測位不可能な第2の無線端末は、測位電波は受信できなくても、測位可能な第1の無線端末と通信することができる場合がある。このとき、第2の無線端末は、第1の無線端末からその位置情報を取得することができる。また、第2の無線端末は、第1の無線端末からの受信電波の無線品質(例えば受信レベル)によって、第1の無線端末との間の距離を推定することできる。第1の無線端末の位置情報と、それら無線端末間の推定距離とを用いて、第2の無線端末自身がその位置情報を推定することができる。
【0027】
これによって、測位電波を受信することができない第2の無線端末であっても、位置情報を推定することができる。その後、更なる測位電波を受信できない他無線端末は、位置情報を推定し且つ保持した第2の無線端末と通信することによって、位置情報を推定することができる。このように、無線端末は、自律分散的に他の無線端末と相互通信することによって、最終的には、ネットワークシステム全体の無線端末が、自らの位置情報を推定することができる。
【0028】
図2は、無線端末の位置情報に対するレベルを表す説明図である。
【0029】
図2によれば、縦方向に、位置情報のレベルが表されている。これは、物理的な位置関係を表すものではない。各無線端末が保持する位置情報には、その精度を表すレベルが対応付けられている。
【0030】
位置情報の「レベル」は、最高精度をレベル0とし、順に低いもの(レベル1,2,3・・・)にされる。このレベルによって、各無線端末が保持する位置情報における精度の高低を、比較することができる。本発明によれば、無線端末は、他無線端末から受信した位置情報のレベルが、当該自無線端末が保持する位置情報のレベルよりも低い場合、他無線端末の位置情報を用いて位置情報を更新しないようにする。
【0031】
次に、レベル付けの基準について説明する。GPS衛星の位置情報は、現在利用できる最高精度のものであって、レベル0と規定される。次に、そのGPS衛星からの測位電波を受信した無線端末における位置情報は、レベル1と規定される。
【0032】
尚、無線端末が、GPS衛星からの測位電波を直接的に受信することができる場合であっても、その捕捉する衛星の数、仰角、無線端末の時刻精度、仰角マスク等の要因に応じて、その無線端末の位置情報の精度は変化する。それら要因に応じて、無線端末のレベルは、レベル1から2までの間で変化する。また、GPS衛星が捕捉できず且つレベルが0より低い無線端末の位置情報を用いて推定した無線端末の位置情報は、レベル2よりも低いレベルが割り当てられる。レベルが2よりも低い無線端末の位置情報を用いて推定した無線端末の位置情報は、レベル3よりも低いレベルが割り当てられる。
【0033】
図2によれば、GPS衛星A〜Eは、レベル0と規定される。
無線端末bは、GPS衛星A、B、C及びDを空間的に十分なばらつきをもって捕捉している。そのために、精度良く位置情報を得ることが可能であり、「レベル1」と規定される。
無線端末aは、無線端末bと同じ衛星を捕捉しているものの、衛星との仰角が小さい。そのために、無線端末bほどの精度が取れず、例えば「1.2」と規定される。
無線端末cは、GPS衛星B、C及びDを捕捉可能であるが、衛星A及びEを捕捉できない。そのために、更に劣化して「1.5」と規定される。
無線端末dは、GPS衛星D及びEの2つの衛星しか捕捉できない。そのために、位置情報の精度は、更に劣化した「1.7」と規定される。
無線端末eは、GPS衛星を捕捉できないが、無線端末a、b、c及びdを捕捉している。無線端末eは、これら無線端末の劣化したレベルの位置情報に基づいて、位置情報を推定するために、そのレベルは更に劣化し、例えば「2.2」と規定される。
以下、無線端末f〜iが、同様にしてレベル付けされる。
【0034】
このように、他無線端末から位置情報の精度と、自無線端末の位置情報の精度とは、比較可能となる。例えば、端末bと端末gとは、当初、直接的に通信可能ではないが、移動によって通信可能となった場合、端末b及び端末gとの間でレベルを比較することができる。
【0035】
尚、図2によれば、レベル0に、GPS衛星の他、既知の位置情報を持つ固定のアクセスポイント、RFIDシステム及び超音波位置検知システムも設置されている。勿論、映像を用いて無線端末の位置を測定する装置であってもよい。このように、異なる種類の位置情報配信システムが混在する場合であっても、位置情報の精度を「レベル」として扱うことができる。
【0036】
また、国土地理院などから提供される位置情報のデータベースは、十分に信頼度が高いため、この位置情報は、GPS衛星と同様にレベル0と規定できる。位置推定システム毎に異なるレベルを規定することによって、異なる測位装置であっても統合的な運用を容易にする。
【0037】
図3は、図2における位置情報のレベルの改善を表す説明図である。
【0038】
図3によれば、無線端末dは、これまで捕捉していたGPS衛星D及びE(図2参照)に加えて、新たに衛星B及びCを捕捉したとする。無線端末dは、GPS衛星を4機捕捉することとなる。これによって、無線端末dが保持する位置情報のレベルは、改善(向上)する。
【0039】
無線端末dの位置情報のレベルが向上した場合、その無線端末dからの受信電波によって位置情報を推定していた無線端末e〜hについても、その位置情報のレベルが向上する。更に、無線端末e〜hからの受信電波によって位置情報を推定していた無線端末iについても、その位置情報のレベルが向上する。
【0040】
図4は、無線端末における位置推定方法を表すフローチャートである。図5は、本発明を用いて推定される位置情報の説明図である。
【0041】
図4によれば、無線端末は、自無線端末の位置情報と、その位置情報の精度を高い順に規定したレベルとを保持する。
【0042】
(S401)無線端末は、GPS衛星から測位電波を受信する。
(S402)次に、無線端末は、測位電波に基づいて、位置情報を取得可能か否か判定する。取得可能な場合は、S410へ移行する。
(S403)測位電波に基づいて自無線端末の位置情報を取得できない場合、無線端末は、無線リンクを介して通信可能な他無線端末を探索する。
(S404)無線端末は、無線リンクを介して通信可能な他無線端末から、位置情報及びレベルを取得する。
(S405)ここで、無線端末は、他無線端末のレベルと、自無線端末のレベルとを比較する。自無線端末のレベルが、他無線端末のレベル以上である場合、そのまま処理を終了する。
【0043】
レベルは、前述したように位置情報の精度を規定している。従って、最高精度を0とし、精度が劣化するのに応じて順次大きな数値で規定される。S405の比較によって、自無線端末のレベルが、他無線端末のレベル以上である場合、その他無線端末の位置情報を用いて、自無線端末の位置情報の更新を実行しない。これによって、位置情報の精度の劣化を防止することができる。
【0044】
(S406)一方、自無線端末のレベルが、他無線端末のレベルよりも低い場合、無線端末は、自無線端末の位置情報と、他無線端末の位置情報とを直線上に結ぶ補正対象距離Dを算出する。図5によれば、補正対象の位置情報(x,y,z)と、第1の他無線端末の位置情報(x0,y0,z0)とを直線上に結ぶ補正対象距離Dが表されている。
【0045】
(S407)次に、無線端末は、他無線端末からの受信電波に基づいて、他無線端末との間の推定距離D’を導出する。推定距離D’は、例えば受信電波強度に基づいて導出される。図5によれば、現実の位置の無線端末は、第1の他無線端末から受信した受信電波に基づいて、推定距離D’を導出する。
【0046】
(S408)無線端末は、補正対象距離Dと、推定距離D’との差分の絶対値|D−D’|を算出する。
(S409)次に、無線端末は、その差分|D−D’|と所定閾値とを比較する。差分|D−D’|が、所定閾値以下である場合、そのまま処理を終了する。所定閾値で比較することによって、補正対象距離Dと推定距離D’との差分が小さい場合にも、頻繁に位置情報を更新することを避けることができる。
【0047】
(S410)一方、差分|D−D’|が所定閾値よりも大きい場合、無線端末は、位置情報を更新する。幾何学的には、最初に、他無線端末の位置情報と自無線端末の位置情報とを結ぶ直線を算出し、その距離を補正対象距離Dとする。そして、他無線端末の位置情報を基点として、その直線上で、推定距離D’に対応する位置を決定する。その推定距離D’に対応する座標点を、新たに推定された位置情報となる。図5によれば、補正対象の位置情報と第1の他無線端末とを結ぶ直線上で、推定距離D’の位置を、1回目の推定位置とする。
【0048】
(S411)無線端末は、自無線端末の位置情報の精度を規定するレベルを、他無線端末の位置情報のレベル及び推定距離D’等に基づいて算出する。例えば、推定距離D’が長くなるほど、レベル自体は、低く設定される。無線端末は、新たに設定されたレベルを用いて、保持する位置情報のレベルを更新する。
【0049】
図5によれば、無線端末は、1回目の推定位置から、更に第2の他無線端末からの受信電波によって、位置を補正する。1回目の推定位置と、第2の他無線端末の位置情報(x1,y1,z1)とを直線上に結ぶ補正対象距離Dが表されている。次に、現実の位置の無線端末は、第2の他無線端末から受信した受信電波に基づいて、推定距離D’を導出する。そして、第1の推定位置と第2の他無線端末とを結ぶ直線上で、推定距離D’の位置を、2回目の推定位置とする。
【0050】
図6は、本実施形態の無線端末の機能構成図である。
【0051】
図6によれば、無線端末1は、測位電波受信部100と、無線LANインタフェース部110とを有する。測位電波受信部100は、GPS衛星2からの測位電波を受信する。捕捉できたGPS衛星からの情報は、位置情報取得部101へ出力される。また、無線LANインタフェース部110は、無線リンクを介して他無線端末と通信する。例えば、アドホックネットワークプロトコルの機能も有する。
【0052】
また、無線端末1は、位置情報取得部101と、記憶部102と、他端末探索部111と、レベル比較部112と、距離推定部113と、位置情報推定部114と、レベル更新部115と、位置情報更新部116とを有する。これら機能構成部は、無線端末に搭載されたコンピュータによって実行される位置推定プログラムによって実現される。
【0053】
位置情報取得部101は、測位電波受信部100から測位電波の情報を受け取り、位置情報を取得可能か否かを判定する。位置情報を取得可能か否かは、捕捉できたGPS衛星の数や仰角等の情報に応じて判定される。取得できた自無線端末の位置情報は、記憶部102へ出力される。また、捕捉できたGPS衛星の数や仰角等の情報に応じて算出した、その位置情報のレベルも、記憶部102へ出力する。
【0054】
記憶部102は、自無線端末の位置情報及びレベルを記憶する。自無線端末の位置情報は、位置情報推定部114へ出力され、自無線端末のレベルは、レベル比較部112へ出力される。
【0055】
他端末探索部111は、位置情報取得部101によって測位電波から位置情報を取得できない場合に実行される。他端末探索部111は、無線LANインタフェース部110を介して他無線端末を探索し、他無線端末から位置情報及びレベルを受信する。他無線端末の位置情報は、位置情報推定部114へ出力され、他無線端末のレベルは、レベル比較部112及びレベル更新部115へ出力される。また。他端末探索部111は、他無線端末からの電波の受信レベルを計測し、その受信レベルから他無線端末と自無線端末間の伝播損失L(又は遅延時間)を計測する。その伝播損失Lは、距離推定部113へ出力される。
【0056】
尚、他端末探索部111は、タイマによって、周期的に周辺の他無線端末を探索することも好ましい。また、探索に必要な時間は、周辺の伝播環境等に応じて適応的に決定されるものであってもよいし、予め決定した一定時間であってもよい。
【0057】
レベル比較部112は、他無線端末のレベルと、記憶部102に保持する自無線端末のレベルとを比較する。自無線端末のレベルが他無線端末のレベルよりも低い場合、推定許可が、距離推定部113へ通知される。自無線端末のレベルが他無線端末のレベル以上である場合、距離推定部113は実行されない。
【0058】
距離推定部113は、レベル比較部112から推定許可の通知を受けた場合、他端末探索部111から出力される伝播損失Lに基づいて、他無線端末から自無線端末までの推定距離を算出する。端末間の距離dと伝播損失Lとの関係は、次式(1)で表される。
L=10log10(4πd/λ) 式(1)
ここで、Lは伝播損失であり、dは距離であり、λは使用電波の波長であり、πは円周率である。尚、伝播損失に代えて、遅延時間を用いるものであってもよい。
【0059】
距離推定部113は、具体的には、他端末探索部111で計測された伝播損失Lから、式(1)の逆関数である次式(2)を用いて距離dを算出する。
d=(λ/4π)exp((L(loge10)/10) 式(2)
この推定された距離d(以下「推定距離D’」と表示する)は、位置情報推定部114、レベル更新部115及び位置情報更新部116へ出力される。尚、伝播損失Lは、マルチパスやフェージングなどの周辺環境によって大きく変動するため、例えば一定時間程度の観測をして、その変動を抑制することも好ましい。
【0060】
位置情報推定部114は、他端末探索部111から他無線端末の位置情報を入力し、距離推定部113から推定距離D’を入力し、記憶部102から自無線端末の位置情報を入力する。ここで、他無線端末の位置情報(x0,y0,z0)と、自無線端末の位置情報(x,y,z)とが結ばれた直線上における補正対象距離Dを、次式(3)によって算出する。
D=√((x−x0)2+(y−y0)2+(z−z0)2) 式(3)
【0061】
次に、位置情報推定部114は、自無線端末の新たな推定位置(x’,y’,z’)を、他無線端末の位置(x0,y0,z0)から推定距離D’だけ離れたこの直線上における位置として算出する。即ち、次式(4)に基づいて、自無線端末の新たな推定位置(x’,y’,z’)を算出する。
x’−x0=(x−x0)D’/D
y’−y0=(y−y0)D’/D 式(4)
z’−z0=(z−z0)D’/D
自無線端末の新たな推定位置(x’,y’,z’)は、記憶部102へ出力される。
【0062】
レベル更新部115は、位置推定に用いた他無線端末のレベル及び推定距離に基づいて、自無線端末のレベルを更新する。自無線端末のレベルは、先ず、位置推定に用いた他無線端末のレベルに依存する。また、レベルは、距離推定による誤差を加えて、更に劣化する。距離推定による誤差は、その距離が大きいほど誤差も大きくなるために、推定距離が長くなるに応じてレベルが低下するように算出される。
【0063】
位置情報更新部116は、位置情報推定部114で算出された推定位置情報(x’,y’,z’)を用いて、自無線端末が保持する位置情報(x,y,z)を更新する。ここでは、上式(3)の距離Dと推定距離D’との差分の絶対値|D−D’|を計算する。そして、所定閾値と差分|D−D’|を比較する。所定閾値より差分が大きい場合には、新たに推定された位置情報(x’、y’、z’)を用いて位置情報(x,y,z)を更新する。
【0064】
図7は、三角測量に基づく位置情報の推定を表す説明図である。
【0065】
本発明によれば、自無線端末が、誤差を含むかもしれない位置情報を、記憶部に予め保持しておくことを前提としている。従って、自無線端末が、初期動作の段階では何ら位置情報を保持していない。この場合、位置情報推定部114は、例えば従来技術に基づく「三角測量」の技術を用いることができる。「三角測量」とは、複数の他無線端末の位置を中心にした各推定距離D’の半径を有する複数の球面の交点として、位置情報を推定する。
【0066】
具体的には、無線端末は、自無線端末から無線リンクで通信可能な複数の他無線端末の探索が完了した後、予め定めておいた位置情報推定の条件を満たす場合に位置情報を算出する。この位置情報推定の条件として、例えば以下のような場合がある。
(1)捕捉した他無線端末の数が一定数以上になった場合
(2)自無線端末のレベル以上のレベルを持つ他無線端末が一定数以上存在する場合
(3)自無線端末の位置推定に未使用の他無線端末が一定数存在する場合
(4)累積した位置情報の誤差が閾値以上である場合
【0067】
ここでは、位置情報推定の条件として、捕捉した他無線端末の数が5以上の場合に位置情報を推定するとする。この場合は、捕捉した5つの無線端末からの位置情報(xi,yi,zi)(i=1から5)及びそれら他無線端末から自無線端末への伝播損失Li(i=1から5)から推定される距離di(i=1から5)に基づいて、式(5)で示される5つの式を得る。そして、これら5つの式を連立させて、位置情報(x、y、z)を得る。この位置情報(x、y、z)は、新たな推定位置情報(x’、y’、z’)そのものである。このようにして、一度、自無線端末の位置情報を獲得した後は、既述したように、式(5)によって自無線端末の新たな推定位置を算出できる。
(x−x1)2+(y−y1)2+(z−z1)2=d12
(x−x2)2+(y−y2)2+(z−z2)2=d22
(x−x3)2+(y−y3)2+(z−z3)2=d32 式(5)
(x−x4)2+(y−y4)2+(z−z4)2=d42
(x−x5)2+(y−y5)2+(z−z5)2=d52
【0068】
以上、詳細に説明したように、本発明の無線端末の位置推定方法、無線端末及び位置推定プログラムによれば、測位電波を受信することができない環境にあっても、無線端末が相互に通信する際に、精度の高い位置情報のみを用いて当該無線端末の位置情報を推定するために、その位置情報の精度を高めることができる。
【0069】
また、本発明によれば、各無線端末が、伝播環境に依存することなく、自律分散的に位置情報を推定することできる。特に、センサネットワークを展開した領域内における利用が見込まれる。例えば、屋内や地下環境でも、各無線端末が、電波伝播状態や温度、湿度など様々な情報をセンシングし、それらの情報と測定した位置情報をセットにして管理することができる。また、ネットワーク内のいくつかの基準となる測位電波送信装置に対して、正確な位置情報を随時入力することによって、ネットワークの全無線端末の位置情報の精度を継続して向上させることもできる。
【0070】
更に、本発明によれば、多数の測位電波送信装置をインフラストラクチャとして配置する必要がないために、低コストで位置情報の推定を実現することができる。更に、本発明によれば、測位電波送信装置の種別に応じて位置情報の精度を表すレベルを対応付けることもできる。更に、無線端末が保持する位置情報にはレベルが対応付けられており、そのレベルは、周辺の電波伝搬環境には依存しない位置情報の精度を表す。
【0071】
前述した本発明の種々の実施形態において、本発明の技術思想及び見地の範囲の種々の変更、修正及び省略は、当業者によれば容易に行うことができる。前述の説明はあくまで例であって、何ら制約しようとするものではない。本発明は、特許請求の範囲及びその均等物として限定するものにのみ制約される。
【図面の簡単な説明】
【0072】
【図1】本発明におけるシステム構成図である。
【図2】無線端末の位置情報に対するレベルを表す説明図である。
【図3】図2における位置情報のレベルの改善を表す説明図である。
【図4】無線端末における位置推定方法を表すフローチャートである。
【図5】本発明を用いて推定される位置情報の説明図である。
【図6】本発明における無線端末の機能構成図である。
【図7】三角測量に基づく位置情報の推定を表す説明図である。
【符号の説明】
【0073】
1 無線端末
100 測位電波受信部
101 位置情報取得部
102 記憶部
110 無線LANインタフェース部
111 他端末探索部
113 距離推定部
114 位置情報推定部
115 レベル更新部
116 位置情報更新部
2 GPS衛星、測位電波送信装置
3 電波遮蔽物
【特許請求の範囲】
【請求項1】
複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、
前記無線端末は、自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを保持し、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、
他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、
自無線端末のレベルが他無線端末のレベルより低い場合、受信電波に基づいて、自無線端末から他無線端末までの推定距離を算出する第3のステップと、
前記他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する第4のステップと、
を有することを特徴とする位置推定方法。
【請求項2】
他無線端末のレベル及び推定距離に基づいて自無線端末のレベルを算出し、該レベルを自無線端末のレベルとして更新するする第5のステップを更に有することを特徴とする請求項1に記載の位置推定方法。
【請求項3】
前記他無線端末の位置情報と自無線端末の位置情報とを直線上に結ぶ距離Dを算出し、該距離Dと第3のステップで算出された推定距離D’との差分が、所定閾値以上である場合、前記直線上における前記他無線端末からの推定距離D’に対応する位置情報を用いて、前記自無線端末の位置情報を更新する第6のステップを更に有することを特徴とする請求項1又は2に記載の位置推定方法。
【請求項4】
第3のステップについて、前記推定距離は、他無線端末からの受信電波の伝播損失又は到達時間に基づいて推定されることを特徴とする請求項1から3のいずれか1項に記載の位置推定方法。
【請求項5】
前記無線端末は、測位電波を受信可能であって、
第1のステップの前段について、前記無線端末は、前記測位電波を受信し且つ自無線端末の位置情報を取得可能か否かを判定し、取得できない場合に第1のステップへ移行することを特徴とする請求項1に記載の位置推定方法。
【請求項6】
GPS(Global Positioning System)衛星からの測位電波である場合、捕捉したGPS衛星の数及び仰角に基づいてレベルを算出し、又は、
自装置の位置情報を放送する測位装置からの測位電波である場合、該測位装置との間の推定距離に基づいてレベルを算出する
ことを特徴とする請求項5に記載の位置推定方法。
【請求項7】
第2のステップについて、自無線端末のレベルが他無線端末のレベルより高い場合は、処理を終了することを特徴とする請求項1から6のいずれか1項に記載の位置推定方法。
【請求項8】
無線リンクを介して相互接続するネットワークシステムにおける無線端末であって、
自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを記憶する記憶手段と、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、該無線端末の位置情報及びレベルを取得する他端末探索手段と、
他無線端末のレベルと自無線端末のレベルとを比較するレベル比較手段と、
自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から前記探索した無線端末までの推定距離を算出する距離推定手段と、
前記他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する位置情報推定手段と
を有することを特徴とする無線端末。
【請求項9】
無線リンクを介して相互接続するネットワークシステムにおける無線端末に搭載されたコンピュータを機能させる位置推定プログラムにおいて、
自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを記憶する記憶手段と、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、該無線端末の位置情報及びレベルを取得する他端末探索手段と、
他無線端末のレベルと自無線端末のレベルとを比較するレベル比較手段と、
自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から前記探索した無線端末までの推定距離を算出する距離推定手段と、
前記他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する位置情報推定手段と
してコンピュータを機能させることを特徴とする位置推定プログラム。
【請求項1】
複数の無線端末が無線リンクを介して相互に接続されるネットワークシステムにおける無線端末の位置推定方法において、
前記無線端末は、自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを保持し、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、他無線端末の位置情報及びレベルを取得する第1のステップと、
他無線端末のレベルと自無線端末のレベルとを比較する第2のステップと、
自無線端末のレベルが他無線端末のレベルより低い場合、受信電波に基づいて、自無線端末から他無線端末までの推定距離を算出する第3のステップと、
前記他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する第4のステップと、
を有することを特徴とする位置推定方法。
【請求項2】
他無線端末のレベル及び推定距離に基づいて自無線端末のレベルを算出し、該レベルを自無線端末のレベルとして更新するする第5のステップを更に有することを特徴とする請求項1に記載の位置推定方法。
【請求項3】
前記他無線端末の位置情報と自無線端末の位置情報とを直線上に結ぶ距離Dを算出し、該距離Dと第3のステップで算出された推定距離D’との差分が、所定閾値以上である場合、前記直線上における前記他無線端末からの推定距離D’に対応する位置情報を用いて、前記自無線端末の位置情報を更新する第6のステップを更に有することを特徴とする請求項1又は2に記載の位置推定方法。
【請求項4】
第3のステップについて、前記推定距離は、他無線端末からの受信電波の伝播損失又は到達時間に基づいて推定されることを特徴とする請求項1から3のいずれか1項に記載の位置推定方法。
【請求項5】
前記無線端末は、測位電波を受信可能であって、
第1のステップの前段について、前記無線端末は、前記測位電波を受信し且つ自無線端末の位置情報を取得可能か否かを判定し、取得できない場合に第1のステップへ移行することを特徴とする請求項1に記載の位置推定方法。
【請求項6】
GPS(Global Positioning System)衛星からの測位電波である場合、捕捉したGPS衛星の数及び仰角に基づいてレベルを算出し、又は、
自装置の位置情報を放送する測位装置からの測位電波である場合、該測位装置との間の推定距離に基づいてレベルを算出する
ことを特徴とする請求項5に記載の位置推定方法。
【請求項7】
第2のステップについて、自無線端末のレベルが他無線端末のレベルより高い場合は、処理を終了することを特徴とする請求項1から6のいずれか1項に記載の位置推定方法。
【請求項8】
無線リンクを介して相互接続するネットワークシステムにおける無線端末であって、
自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを記憶する記憶手段と、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、該無線端末の位置情報及びレベルを取得する他端末探索手段と、
他無線端末のレベルと自無線端末のレベルとを比較するレベル比較手段と、
自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から前記探索した無線端末までの推定距離を算出する距離推定手段と、
前記他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する位置情報推定手段と
を有することを特徴とする無線端末。
【請求項9】
無線リンクを介して相互接続するネットワークシステムにおける無線端末に搭載されたコンピュータを機能させる位置推定プログラムにおいて、
自無線端末の位置情報と、該位置情報の精度を高い順に規定したレベルとを記憶する記憶手段と、
自無線端末と無線リンクを介して通信可能な他無線端末を探索し、該無線端末の位置情報及びレベルを取得する他端末探索手段と、
他無線端末のレベルと自無線端末のレベルとを比較するレベル比較手段と、
自無線端末のレベルが他無線端末のレベルより低い場合、自無線端末から前記探索した無線端末までの推定距離を算出する距離推定手段と、
前記他無線端末の位置情報及び推定距離に基づいて、自無線端末の推定位置情報を算出する位置情報推定手段と
してコンピュータを機能させることを特徴とする位置推定プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−112869(P2010−112869A)
【公開日】平成22年5月20日(2010.5.20)
【国際特許分類】
【出願番号】特願2008−286353(P2008−286353)
【出願日】平成20年11月7日(2008.11.7)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
【公開日】平成22年5月20日(2010.5.20)
【国際特許分類】
【出願日】平成20年11月7日(2008.11.7)
【出願人】(000208891)KDDI株式会社 (2,700)
【Fターム(参考)】
[ Back to top ]