
無線端末装置及び制御方法
【課題】GPS測位における利用者の利便性を損なうことなく、より省電力を実現できる無線端末装置及び制御方法を提供すること。
【解決手段】携帯電話機1は、衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理部34と、捕捉した衛星から得られる信号の受信強度を取得する強度取得部31と、捕捉した衛星の仰角及び方位角を取得する方向取得部32と、強度取得部31により取得された受信強度、及び方向取得部32により取得された方向に基づいて、GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定部33と、を備える。
【解決手段】携帯電話機1は、衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理部34と、捕捉した衛星から得られる信号の受信強度を取得する強度取得部31と、捕捉した衛星の仰角及び方位角を取得する方向取得部32と、強度取得部31により取得された受信強度、及び方向取得部32により取得された方向に基づいて、GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定部33と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、GPS測位機能を有する無線端末装置及び制御方法に関する。
【背景技術】
【0002】
従来、無線端末装置の現在地情報を取得するために、GPS(Global Positioning System)による測位サービスが提供されている。このサービスでは、無線端末装置は、GPS衛星(以下、単に衛星という)の方向を特定するための補助情報を基地局等から取得すると、この補助情報に基づいて衛星の電波を捕捉する。そして、無線端末装置は、衛星から受信した信号に基づいて測位処理を実行する。このとき、複数の衛星による測位結果を用いることにより、無線端末装置は、測位精度を向上できる。
【0003】
ところで、例えば携帯電話機のようにバッテリ駆動の無線端末装置の場合、このGPS測位処理が継続的に実行されると動作時間が短くなる。そこで、例えば、移動速度が遅い場合に測位周期を長くして省電力を図ることが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−249565号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、衛星の捕捉数や電波状況によって測位精度は大きく変動するが、この測位精度の高低にかかわらず、上述のように測位周期を変動させると、精度の低い測位処理を頻繁に実行して電力を浪費するおそれもあった。
【0006】
本発明は、GPS測位における利用者の利便性を損なうことなく、より省電力を実現できる無線端末装置及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る無線端末装置は、衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理部と、前記捕捉した衛星から得られる信号の受信強度を取得する強度取得部と、前記捕捉した衛星の仰角及び方位角を取得する方向取得部と、前記強度取得部により取得された受信強度、及び前記方向取得部により取得された方向に基づいて、前記GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定部と、を備える。
【0008】
また、前記頻度設定部は、前記強度取得部により取得された受信強度が所定値以上の衛星が所定数以上捕捉され、かつ、前記方向取得部により取得された仰角が所定以下の高度に偏っていない、若しくは方位角がある範囲に偏っていない条件を満たす場合、前記GPS測位処理の実行頻度を初期値に設定し、当該条件を満たさない場合、前記GPS測位処理の実行頻度を前記初期値よりも低く設定することが好ましい。
【0009】
また、前記測位処理部は、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角の範囲が所定以上の高度である衛星を所定数以上捕捉すると、以降の衛星捕捉動作を行わないことが好ましい。
【0010】
また、本発明に係る無線端末装置は、前記捕捉した衛星について、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角の範囲が所定以上の高度である場合、当該衛星の捕捉優先度を上位に設定する優先度設定部をさらに備えることが好ましい。
【0011】
また、前記優先度設定部は、捕捉できなかった衛星について前記方向取得部により取得された方向がある領域に偏っている場合、当該領域内にあると予測される衛星の捕捉優先度を下位に設定することが好ましい。
【0012】
また、前記優先度設定部は、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角が所定以下の高度である衛星が捕捉された場合、当該衛星の近隣領域にあると予測される衛星の捕捉優先度を下位に設定することが好ましい。
【0013】
また、前記優先度設定部は、所定以上の高度であると予測される衛星が捕捉できなかった場合、当該衛星と方位角が近似し、かつ、当該衛星よりも低い高度にあると予測される衛星の捕捉優先度を下位に設定することが好ましい。
【0014】
また、前記測位処理部は、位置登録した基地局から得られる基地局識別情報に基づいて、前記頻度設定部により設定された実行頻度に対応する移動が検知された場合に、GPS測位処理を実行することが好ましい。
【0015】
また、前記測位処理部は、前記実行頻度に対応して、前記基地局識別情報のうち、セル情報、基地局ID又はシステムIDが変化した場合に、GPS測位処理を実行することが好ましい。
【0016】
本発明に係る制御方法は、GPS測位機能を有する無線端末装置の制御方法であって、衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理ステップと、前記捕捉した衛星から得られる信号の受信強度を取得する強度取得ステップと、前記捕捉した衛星の仰角及び方位角を取得する方向取得ステップと、前記強度取得ステップにおいて取得された受信強度、及び前記方向取得ステップにおいて取得された方向に基づいて、前記GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定ステップと、を含む。
【発明の効果】
【0017】
本発明によれば、GPS測位における利用者の利便性を損なうことなく、無線端末装置において、より省電力を実現できる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係る携帯電話機の外観斜視図である。
【図2】本発明の実施形態に係る携帯電話機の機能を示すブロック図である。
【図3】本発明の実施形態に係る測位頻度に対応するGPS測位処理の実行タイミングを示す図である。
【図4】本発明の実施形態に係る処理を示すフローチャートである。
【図5】本発明の実施形態に係るGPS測位処理を示すフローチャートである。
【図6】本発明の実施形態に係る衛星リストの並べ替え処理を示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態の一例について説明する。なお、本実施形態では、無線端末装置の一例として、携帯電話機1を説明する。
【0020】
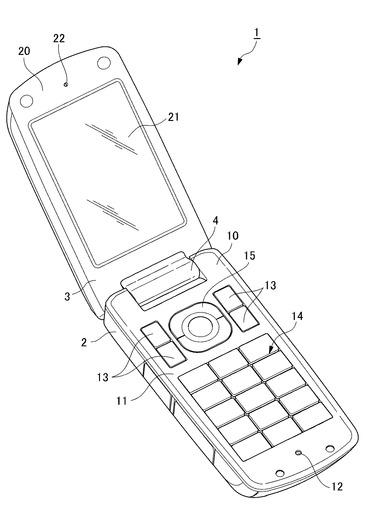
図1は、本実施形態に係る携帯電話機1の外観斜視図である。
携帯電話機1は、操作部側筐体2と、表示部側筐体3と、を備えて構成される。操作部側筐体2は、表面部10に、操作部11と、携帯電話機1の使用者が通話時や音声認識アプリケーションを利用時に発した音声が入力されるマイク12と、を備えて構成される。操作部11は、各種設定機能や電話帳機能やメール機能等の各種機能を作動させるための機能設定操作ボタン13と、電話番号の数字やメールの文字等を入力するための入力操作ボタン14と、各種操作における決定やスクロール等を行う決定操作ボタン15と、から構成されている。
【0021】
また、表示部側筐体3は、表面部20に、各種情報を表示するための表示部21と、通話の相手側の音声を出力するレシーバ22と、を備えて構成されている。
【0022】
また、操作部側筐体2の上端部と表示部側筐体3の下端部とは、ヒンジ機構4を介して連結されている。また、携帯電話機1は、ヒンジ機構4を介して連結された操作部側筐体2と表示部側筐体3とを相対的に回転することにより、操作部側筐体2と表示部側筐体3とが互いに開いた状態(開放状態)にしたり、操作部側筐体2と表示部側筐体3とを折り畳んだ状態(折畳み状態)にしたりできる。
【0023】
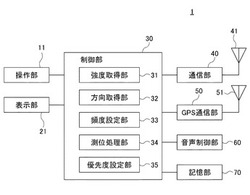
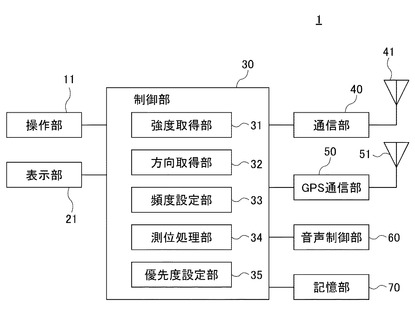
図2は、本実施形態に係る携帯電話機1の機能を示すブロック図である。
携帯電話機1は、操作部11と、表示部21と、制御部30と、通信部40と、メインアンテナ41と、GPS通信部50と、GPSアンテナ51と、音声制御部60と、記憶部70と、を備える。
【0024】
制御部30は、携帯電話機1の全体を制御しており、例えば、表示部21、通信部40、GPS通信部50、音声制御部60等に対して所定の制御を行う。また、制御部30は、操作部11等から入力を受け付けて、各種処理を実行する。そして、制御部30は、処理実行の際には、記憶部70を制御し、各種プログラム及びデータの読み出し、並びにデータの書き込みを行う。
【0025】
さらに、制御部30は、強度取得部31と、方向取得部32と、頻度設定部33と、測位処理部34と、優先度設定部35とを備える。そして、制御部30は、携帯電話機1のユーザやアプリケーション等から現在位置の測位要求を受け付けると、所定の測位処理に基づいて、取得した位置情報を出力する。なお、制御部30が備える各部の機能は後述する。
【0026】
通信部40は、所定の周波数帯(例えば、2GHz帯や800MHz帯等)で外部装置(基地局)と通信を行う。そして、通信部40は、メインアンテナ41より受信した信号を復調処理し、処理後の信号を制御部30に供給し、また、制御部30から供給された信号を変調処理し、メインアンテナ41から外部装置に送信する。
【0027】
また、通信部40は、音声通話やデータ通信等に係る信号の送受信に加えて、測位処理の方式(例えば、Assisted測位)によっては、基地局及びネットワークを介して測位サーバと接続し、衛星サーチ補助情報や、測位結果等を取得する。なお、衛星の捕捉状況に応じて、制御部30にて実行される測位処理の方式は異なり、送受信されるデータの内容も異なる。
【0028】
GPS通信部50は、GPSアンテナ51により受信した衛星からの所定周波数帯の電波信号を復調処理し、処理後の信号を制御部30に供給する。なお、GPS通信部50及びGPSアンテナ51の機能は、それぞれ、通信部40及びメインアンテナ41が担ってもよい。
【0029】
音声制御部60は、制御部30の制御に従って、通信部40から供給された信号に対して所定の音声処理を行い、処理後の信号をレシーバ22に出力する。レシーバ22は、音声制御部60から供給された信号を外部に出力する。なお、この信号は、レシーバ22に代えて、又はレシーバ22と共に、スピーカ(図示せず)から出力されるとしてもよい。
【0030】
また、音声制御部60は、制御部30の制御に従って、マイク12から入力された信号を処理し、処理後の信号を通信部40に出力する。通信部40は、音声制御部60から供給された信号に所定の処理を行い、処理後の信号をメインアンテナ41より出力する。
【0031】
記憶部70は、例えば、ワーキングメモリを含み、制御部30による演算処理に利用される。また、本実施形態では、後述の処理を実行するプログラムや各種データベース、例えば、捕捉の優先度が対応付けられた衛星のリスト等が記憶される。なお、記憶部70は、着脱可能な外部メモリを兼ねていてもよい。
【0032】
次に、本実施形態に係る制御部30の各部の機能を詳述する。
強度取得部31は、捕捉した衛星から得られる信号の受信強度を示す搬送波対雑音比(C/N値)を取得する。
【0033】
方向取得部32は、捕捉した衛星の自端末からの方向を示す仰角(例えば、0度〜180度)及び方位角を取得する。
【0034】
頻度設定部33は、強度取得部31により取得されたC/N値、及び方向取得部32により取得された方向(仰角及び方位角)に基づいて、GPS測位処理の測位精度を判定し、このGPS測位処理の実行頻度を設定する。
【0035】
具体的には、頻度設定部33は、強度取得部31により取得されたC/N値が所定値以上の衛星が所定数(例えば、4個)以上捕捉され、かつ、方向取得部32により取得された仰角が所定以下の高度に偏っていない、若しくは方位角がある範囲に偏っていないという条件を満たすか否かにより測位精度を判定する。すなわち、頻度設定部33は、この条件を満たす場合、GPS測位処理の実行頻度を初期値に設定し、条件を満たさない場合、GPS測位処理の実行頻度を初期値よりも低く設定する。なお、設定される実行頻度は2種類には限られず、判定された測位精度の高低に応じて3種類以上あってもよい。
【0036】
ここで、衛星の捕捉数が4個に満たない場合や、仰角が低い又はある方向に偏った衛星を用いた場合、測位精度は低下する。したがって、頻度設定部33は、測位精度が高い場合には、測位頻度を高く(通常の頻度に)して、携帯電話機1の現在位置をより正確に取得させる。一方、頻度設定部33は、測位精度が低下した場合には、携帯電話機1の正確でない移動の軌跡を具体的にしないように、測位頻度を低くして、消費電力を抑制する。
【0037】
測位処理部34は、衛星の方向を示す補助情報に基づいて衛星を捕捉し、これらの捕捉した衛星から得られた信号に基づいて、GPS測位処理を所定の周期で、すなわち頻度設定部33により設定された実行頻度で実行する。
【0038】
このとき、測位処理部34は、強度取得部31により取得されたC/N値が所定値以上であり、かつ、方向取得部32により取得された仰角の範囲が所定以上の高度である衛星を所定数(例えば、4個)以上捕捉すると、十分な測位精度が得られると判断し、以降の衛星捕捉動作を行わない。
【0039】
また、測位処理部34は、通信部40により位置登録した基地局から得られる基地局識別情報に基づいて、頻度設定部33により設定された実行頻度に対応する移動が検知された場合に、GPS測位処理を実行する。一例として、測位処理部34は、実行頻度の高低に対応して、基地局識別情報のうち、セル情報、基地局ID又はシステムIDが変化した場合に、GPS測位処理を実行する。
【0040】
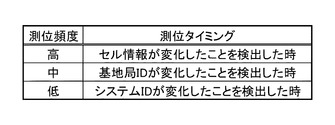
図3は、本実施形態に係る測位頻度に対応するGPS測位処理の実行タイミングを示す図である。この例では、測位頻度は3種類(高、中、低)設定可能である。
【0041】
測位頻度が「高」の場合、測位処理部34は、セル情報が変化したことを検出するとGPS測位処理を実行する。
測位頻度が「中」の場合、測位処理部34は、基地局IDが変化したことを検出するとGPS測位処理を実行する。
測位頻度が「低」の場合、測位処理部34は、システムIDが変化したことを検出するとGPS測位処理を実行する。
【0042】
1つのシステムには複数の基地局が含まれ、1つの基地局には複数のセルが含まれるという関係にあるので、セル、基地局、システムの順に領域面積が広がる。面積が広いほど、領域間の移動頻度が低下するので、測位処理部34は、いずれの変化を検出するのかを切り替えることにより、GPS測位処理の実行頻度を調整できる。
【0043】
優先度設定部35は、捕捉した衛星について、強度取得部31により取得されたC/N値が所定値以上であり、かつ、方向取得部32により取得された仰角の範囲が所定以上の高度で天空にある場合、すなわち、位置情報を算出する上で有効な衛星である場合、この衛星の捕捉優先度を上位に設定する。
【0044】
また、優先度設定部35は、捕捉できなかった衛星について、方向取得部32により取得された方向がある領域に偏っている場合、この方向に衛星電波を遮断する障害物があると判断し、捕捉を試行していなくても、この領域内にあると予測される他の衛星の捕捉優先度を下位に設定する。
【0045】
さらに、優先度設定部35は、強度取得部31により取得されたC/N値が所定値以上であり、かつ、方向取得部32により取得された仰角が所定以下の高度である衛星が捕捉された場合、この衛星電波は信頼性が低いと判断する。すなわち、通常、仰角が低い方向にある衛星のC/N値は低くなるが、逆にC/N値が高くなっている場合、例えば、マルチパス等の影響を受けており、正しい信号でない可能性が高い。すると、優先度設定部35は、この衛星の近隣領域にあると予測される衛星の捕捉優先度も下位に設定する。
【0046】
また、優先度設定部35は、所定以上の高度であると予測される衛星が捕捉できなかった場合、この衛星の方向に障害物があると判断する。そして、優先度設定部35は、この衛星と方位角が近似し、かつ、この衛星よりも低い高度にあると予測される衛星の捕捉優先度を下位に設定する。
【0047】
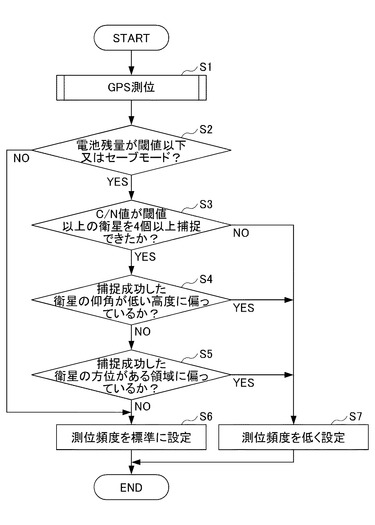
図4は、本実施形態に係る制御部30における処理を示すフローチャートである。なお、本処理は、設定された実行頻度に応じて繰り返し実行される。
【0048】
ステップS1において、制御部30(測位処理部34)は、GPS測位処理を実行する。なお、処理内容は後述する(図5)。
【0049】
ステップS2において、制御部30は、携帯電話機1の電池残量が閾値以下であるか、又は消費電力を抑制するモードであるか否かを判定する。制御部30は、この判定がYESの場合、測位周期を調整して消費電力を抑制するため、処理をステップS3に移し、判定がNOの場合、処理をステップS6に移す。
【0050】
ステップS3において、制御部30(頻度設定部33)は、C/N値が閾値以上の衛星を4個以上捕捉できたか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS4に移し、判定がNOの場合、処理をステップS7に移す。
【0051】
ステップS4において、制御部30(頻度設定部33)は、捕捉に成功した衛星の仰角の範囲が低い高度(α度以下又はβ度以上)に偏っているか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS7に移し、判定がNOの場合、処理をステップS5に移す。
【0052】
ステップS5において、制御部30(頻度設定部33)は、捕捉に成功した衛星の方位角の範囲がある領域に偏っているか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS7に移し、判定がNOの場合、処理をステップS6に移す。
【0053】
ステップS6において、制御部30(頻度設定部33)は、GPS測位処理の精度が十分にあると判断し、測位頻度を標準(初期値)に設定する。
【0054】
ステップS7において、制御部30(頻度設定部33)は、GPS測位処理の精度が十分でないと判断し、測位頻度を低く設定する。
【0055】
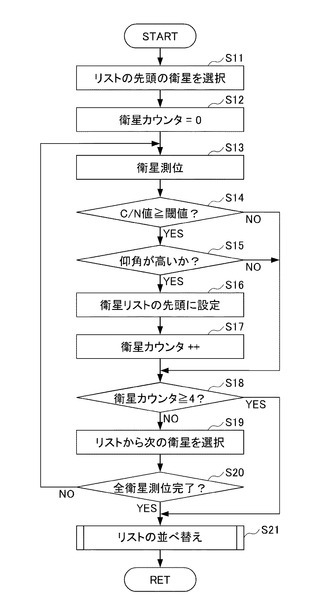
図5は、本実施形態に係る制御部30におけるGPS測位処理を示すフローチャートである。なお、本処理は、図4のステップS1に相当する。
【0056】
ステップS11において、制御部30(測位処理部34)は、捕捉対象である衛星リストの先頭の、最も優先度が高い衛星を選択する。
【0057】
ステップS12において、制御部30(測位処理部34)は、衛星カウンタを0にリセットする。この衛星カウンタは、信頼性が高い衛星を捕捉した数を示し、4個に達すると十分な測位精度が得られる。
【0058】
ステップS13において、制御部30(測位処理部34)は、選択した衛星の電波に基づいて、所定の方式により衛星測位を実行する。
【0059】
ステップS14において、制御部30(測位処理部34)は、衛星電波のC/N値が閾値以上であるか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS15に移し、判定がNOの場合、処理をステップS18に移す。
【0060】
ステップS15において、制御部30(測位処理部34)は、衛星の仰角が高い高度(α度以上β度以下)であるか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS16に移し、判定がNOの場合、処理をステップS18に移す。
【0061】
ステップS16において、制御部30(優先度設定部35)は、選択した衛星の信頼性が高いので、衛星リストの先頭(又は上位)に設定する。
【0062】
ステップS17において、制御部30(測位処理部34)は、衛星カウンタをカウントアップ(+1)する。
【0063】
ステップS18において、制御部30(測位処理部34)は、衛星カウンタが4以上であるか否かを判定する。制御部30は、この判定がYESの場合、十分な測位精度が得られる数の衛星を捕捉したので、衛星の捕捉を終了して、処理をステップS21に移す。一方、判定がNOの場合、制御部30は、処理をステップS19に移す。
【0064】
ステップS19において、制御部30(測位処理部34)は、衛星リストから次に優先度が高い衛星を選択する。
【0065】
ステップS20において、制御部30(測位処理部34)は、衛星リストにある全ての衛星による測位が完了したか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS21に移し、判定がNOの場合、処理をステップS13に移す。
【0066】
ステップS21において、制御部30(優先度設定部35)は、衛星リストの並べ替え処理を実行する。なお、処理内容は後述する(図6)。
【0067】
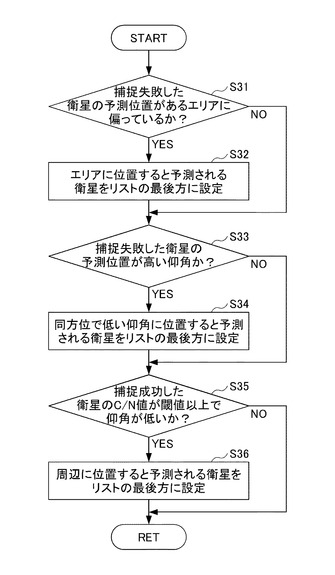
図6は、本実施形態に係る制御部30における衛星リストの並べ替え処理を示すフローチャートである。なお、本処理は、図5のステップS21に相当する。
【0068】
ステップS31において、制御部30(優先度設定部35)は、捕捉に失敗した衛星の予測位置があるエリア(仰角及び方位角が近似する領域)に偏っているか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS32に移し、判定がNOの場合、処理をステップS33に移す。
【0069】
ステップS32において、制御部30(優先度設定部35)は、ステップS31で判定されたエリアに位置すると予測される衛星を、衛星リストの最後方(又は下位)に設定する。
【0070】
ステップS33において、制御部30(優先度設定部35)は、捕捉に失敗した衛星の予測位置がある仰角より高い位置であるか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS34に移し、判定がNOの場合、処理をステップS35に移す。
【0071】
ステップS34において、制御部30(優先度設定部35)は、ステップS33で高い位置にあると判定された衛星と近隣の所定範囲の方位角で、この衛星よりも仰角が低い位置にあると予測される衛星を、衛星リストの最後方(又は下位)に設定する。
【0072】
ステップS35において、制御部30(優先度設定部35)は、捕捉に成功した衛星のC/N値が閾値以上で、かつ、仰角が低い(α度以下又はβ度以上)か否かを判定する。制御部30は、この判定がYESの場合、処理をステップS36に移し、判定がNOの場合、処理を終了する。
【0073】
ステップS36において、制御部30(優先度設定部35)は、ステップS35で低い位置にありC/N値が高いと判定された衛星の周辺の、所定範囲に位置すると予測される衛星を、衛星リストの最後方(又は下位)に設定する。
【0074】
以上のように、本実施形態によれば、携帯電話機1は、衛星から得られる信号の受信強度(C/N値)と方向(仰角及び方位角)に基づいて、GPS測位処理の測位精度を判定し、GPS測位処理の実行頻度を設定できる。したがって、携帯電話機1は、連続してGPS測位を行う場合、測位精度が高ければ、測位頻度を高くして現在位置をより正確に取得する一方、測位精度が低ければ、測位頻度を低くして正確でない移動の軌跡が具体的になるのを抑制すると共に、消費電力を抑制できる。その結果、携帯電話機1は、GPS測位における利用者の利便性を損なうことなく、より省電力を実現できる。
【0075】
また、具体的には、携帯電話機1は、C/N値が高い衛星を4個以上捕捉できない場合、捕捉に成功した衛星が低い位置にある場合、又は捕捉に成功した衛星がある方位に偏っている場合には、測位頻度を低下させる。したがって、携帯電話機1は、これらの条件により不正確と判断される測位情報を、必要以上に頻繁に取得することなく、省電力を実現できる。
【0076】
また、携帯電話機1は、衛星の受信強度及び方向に関する測位環境に応じて、位置情報を算出する上で信頼性の高い衛星を表す優先度を設定し、効率的にGPS測位処理を実行できる。
【0077】
具体的には、携帯電話機1は、高い位置にあってC/N値が高い衛星の優先度を上位にする一方で、捕捉できなかった衛星が偏っている領域、低い位置であるのにC/N値が高い衛星の周辺、及び高い位置にあるのに捕捉できなかった衛星よりも低い位置にある衛星の優先度を下位に設定する。したがって、携帯電話機1は、捕捉を試行していない衛星に関しても、周囲の衛星の捕捉状況に応じて優先度を設定でき、信頼性の高い衛星を優先的に用いて効率的にGPS測位処理を実行できる。
【0078】
さらに、携帯電話機1は、位置登録した基地局から得られる基地局識別情報、具体的には、例えば、セル情報、基地局ID、システムID等に基づいて、設定された測位頻度によるGPS測位処理の実行タイミングを検出する。したがって、携帯電話機1は、移動の軌跡を取得する場合に、測位精度に応じて適切な移動距離ごとにGPS測位処理を実行できる。
【0079】
なお、GPS測位処理の実行タイミングを検出する情報は、これらには限られず、例えば、チャネル情報の切り替えタイミング等、状況に応じて適宜設定可能である。
【0080】
以上、好適な実施形態について説明したが、本発明は前述した実施形態に限定されることなく種々の形態で実施することができる。また、前述の実施形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、前述のものに限定されない。
【0081】
前述の実施形態において、無線端末装置として携帯電話機1について説明しているが、無線端末装置はこれに限定されず、本発明は、PHS(登録商標;Personal Handy phone System)、PDA(Personal Digital Assistant)、ゲーム機、ナビゲーション装置、パーソナルコンピュータ等の他、通信機能に特化した通信専用モジュール等、様々な装置に適用可能である。
【符号の説明】
【0082】
1 携帯電話機(無線端末装置)
11 操作部
21 表示部
30 制御部
31 強度取得部
32 方向取得部
33 頻度設定部
34 測位処理部
35 優先度設定部
40 通信部
41 メインアンテナ
50 GPS通信部
51 GPSアンテナ
60 音声制御部
70 記憶部
【技術分野】
【0001】
本発明は、GPS測位機能を有する無線端末装置及び制御方法に関する。
【背景技術】
【0002】
従来、無線端末装置の現在地情報を取得するために、GPS(Global Positioning System)による測位サービスが提供されている。このサービスでは、無線端末装置は、GPS衛星(以下、単に衛星という)の方向を特定するための補助情報を基地局等から取得すると、この補助情報に基づいて衛星の電波を捕捉する。そして、無線端末装置は、衛星から受信した信号に基づいて測位処理を実行する。このとき、複数の衛星による測位結果を用いることにより、無線端末装置は、測位精度を向上できる。
【0003】
ところで、例えば携帯電話機のようにバッテリ駆動の無線端末装置の場合、このGPS測位処理が継続的に実行されると動作時間が短くなる。そこで、例えば、移動速度が遅い場合に測位周期を長くして省電力を図ることが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−249565号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、衛星の捕捉数や電波状況によって測位精度は大きく変動するが、この測位精度の高低にかかわらず、上述のように測位周期を変動させると、精度の低い測位処理を頻繁に実行して電力を浪費するおそれもあった。
【0006】
本発明は、GPS測位における利用者の利便性を損なうことなく、より省電力を実現できる無線端末装置及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明に係る無線端末装置は、衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理部と、前記捕捉した衛星から得られる信号の受信強度を取得する強度取得部と、前記捕捉した衛星の仰角及び方位角を取得する方向取得部と、前記強度取得部により取得された受信強度、及び前記方向取得部により取得された方向に基づいて、前記GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定部と、を備える。
【0008】
また、前記頻度設定部は、前記強度取得部により取得された受信強度が所定値以上の衛星が所定数以上捕捉され、かつ、前記方向取得部により取得された仰角が所定以下の高度に偏っていない、若しくは方位角がある範囲に偏っていない条件を満たす場合、前記GPS測位処理の実行頻度を初期値に設定し、当該条件を満たさない場合、前記GPS測位処理の実行頻度を前記初期値よりも低く設定することが好ましい。
【0009】
また、前記測位処理部は、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角の範囲が所定以上の高度である衛星を所定数以上捕捉すると、以降の衛星捕捉動作を行わないことが好ましい。
【0010】
また、本発明に係る無線端末装置は、前記捕捉した衛星について、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角の範囲が所定以上の高度である場合、当該衛星の捕捉優先度を上位に設定する優先度設定部をさらに備えることが好ましい。
【0011】
また、前記優先度設定部は、捕捉できなかった衛星について前記方向取得部により取得された方向がある領域に偏っている場合、当該領域内にあると予測される衛星の捕捉優先度を下位に設定することが好ましい。
【0012】
また、前記優先度設定部は、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角が所定以下の高度である衛星が捕捉された場合、当該衛星の近隣領域にあると予測される衛星の捕捉優先度を下位に設定することが好ましい。
【0013】
また、前記優先度設定部は、所定以上の高度であると予測される衛星が捕捉できなかった場合、当該衛星と方位角が近似し、かつ、当該衛星よりも低い高度にあると予測される衛星の捕捉優先度を下位に設定することが好ましい。
【0014】
また、前記測位処理部は、位置登録した基地局から得られる基地局識別情報に基づいて、前記頻度設定部により設定された実行頻度に対応する移動が検知された場合に、GPS測位処理を実行することが好ましい。
【0015】
また、前記測位処理部は、前記実行頻度に対応して、前記基地局識別情報のうち、セル情報、基地局ID又はシステムIDが変化した場合に、GPS測位処理を実行することが好ましい。
【0016】
本発明に係る制御方法は、GPS測位機能を有する無線端末装置の制御方法であって、衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理ステップと、前記捕捉した衛星から得られる信号の受信強度を取得する強度取得ステップと、前記捕捉した衛星の仰角及び方位角を取得する方向取得ステップと、前記強度取得ステップにおいて取得された受信強度、及び前記方向取得ステップにおいて取得された方向に基づいて、前記GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定ステップと、を含む。
【発明の効果】
【0017】
本発明によれば、GPS測位における利用者の利便性を損なうことなく、無線端末装置において、より省電力を実現できる。
【図面の簡単な説明】
【0018】
【図1】本発明の実施形態に係る携帯電話機の外観斜視図である。
【図2】本発明の実施形態に係る携帯電話機の機能を示すブロック図である。
【図3】本発明の実施形態に係る測位頻度に対応するGPS測位処理の実行タイミングを示す図である。
【図4】本発明の実施形態に係る処理を示すフローチャートである。
【図5】本発明の実施形態に係るGPS測位処理を示すフローチャートである。
【図6】本発明の実施形態に係る衛星リストの並べ替え処理を示すフローチャートである。
【発明を実施するための形態】
【0019】
以下、本発明の実施形態の一例について説明する。なお、本実施形態では、無線端末装置の一例として、携帯電話機1を説明する。
【0020】
図1は、本実施形態に係る携帯電話機1の外観斜視図である。
携帯電話機1は、操作部側筐体2と、表示部側筐体3と、を備えて構成される。操作部側筐体2は、表面部10に、操作部11と、携帯電話機1の使用者が通話時や音声認識アプリケーションを利用時に発した音声が入力されるマイク12と、を備えて構成される。操作部11は、各種設定機能や電話帳機能やメール機能等の各種機能を作動させるための機能設定操作ボタン13と、電話番号の数字やメールの文字等を入力するための入力操作ボタン14と、各種操作における決定やスクロール等を行う決定操作ボタン15と、から構成されている。
【0021】
また、表示部側筐体3は、表面部20に、各種情報を表示するための表示部21と、通話の相手側の音声を出力するレシーバ22と、を備えて構成されている。
【0022】
また、操作部側筐体2の上端部と表示部側筐体3の下端部とは、ヒンジ機構4を介して連結されている。また、携帯電話機1は、ヒンジ機構4を介して連結された操作部側筐体2と表示部側筐体3とを相対的に回転することにより、操作部側筐体2と表示部側筐体3とが互いに開いた状態(開放状態)にしたり、操作部側筐体2と表示部側筐体3とを折り畳んだ状態(折畳み状態)にしたりできる。
【0023】
図2は、本実施形態に係る携帯電話機1の機能を示すブロック図である。
携帯電話機1は、操作部11と、表示部21と、制御部30と、通信部40と、メインアンテナ41と、GPS通信部50と、GPSアンテナ51と、音声制御部60と、記憶部70と、を備える。
【0024】
制御部30は、携帯電話機1の全体を制御しており、例えば、表示部21、通信部40、GPS通信部50、音声制御部60等に対して所定の制御を行う。また、制御部30は、操作部11等から入力を受け付けて、各種処理を実行する。そして、制御部30は、処理実行の際には、記憶部70を制御し、各種プログラム及びデータの読み出し、並びにデータの書き込みを行う。
【0025】
さらに、制御部30は、強度取得部31と、方向取得部32と、頻度設定部33と、測位処理部34と、優先度設定部35とを備える。そして、制御部30は、携帯電話機1のユーザやアプリケーション等から現在位置の測位要求を受け付けると、所定の測位処理に基づいて、取得した位置情報を出力する。なお、制御部30が備える各部の機能は後述する。
【0026】
通信部40は、所定の周波数帯(例えば、2GHz帯や800MHz帯等)で外部装置(基地局)と通信を行う。そして、通信部40は、メインアンテナ41より受信した信号を復調処理し、処理後の信号を制御部30に供給し、また、制御部30から供給された信号を変調処理し、メインアンテナ41から外部装置に送信する。
【0027】
また、通信部40は、音声通話やデータ通信等に係る信号の送受信に加えて、測位処理の方式(例えば、Assisted測位)によっては、基地局及びネットワークを介して測位サーバと接続し、衛星サーチ補助情報や、測位結果等を取得する。なお、衛星の捕捉状況に応じて、制御部30にて実行される測位処理の方式は異なり、送受信されるデータの内容も異なる。
【0028】
GPS通信部50は、GPSアンテナ51により受信した衛星からの所定周波数帯の電波信号を復調処理し、処理後の信号を制御部30に供給する。なお、GPS通信部50及びGPSアンテナ51の機能は、それぞれ、通信部40及びメインアンテナ41が担ってもよい。
【0029】
音声制御部60は、制御部30の制御に従って、通信部40から供給された信号に対して所定の音声処理を行い、処理後の信号をレシーバ22に出力する。レシーバ22は、音声制御部60から供給された信号を外部に出力する。なお、この信号は、レシーバ22に代えて、又はレシーバ22と共に、スピーカ(図示せず)から出力されるとしてもよい。
【0030】
また、音声制御部60は、制御部30の制御に従って、マイク12から入力された信号を処理し、処理後の信号を通信部40に出力する。通信部40は、音声制御部60から供給された信号に所定の処理を行い、処理後の信号をメインアンテナ41より出力する。
【0031】
記憶部70は、例えば、ワーキングメモリを含み、制御部30による演算処理に利用される。また、本実施形態では、後述の処理を実行するプログラムや各種データベース、例えば、捕捉の優先度が対応付けられた衛星のリスト等が記憶される。なお、記憶部70は、着脱可能な外部メモリを兼ねていてもよい。
【0032】
次に、本実施形態に係る制御部30の各部の機能を詳述する。
強度取得部31は、捕捉した衛星から得られる信号の受信強度を示す搬送波対雑音比(C/N値)を取得する。
【0033】
方向取得部32は、捕捉した衛星の自端末からの方向を示す仰角(例えば、0度〜180度)及び方位角を取得する。
【0034】
頻度設定部33は、強度取得部31により取得されたC/N値、及び方向取得部32により取得された方向(仰角及び方位角)に基づいて、GPS測位処理の測位精度を判定し、このGPS測位処理の実行頻度を設定する。
【0035】
具体的には、頻度設定部33は、強度取得部31により取得されたC/N値が所定値以上の衛星が所定数(例えば、4個)以上捕捉され、かつ、方向取得部32により取得された仰角が所定以下の高度に偏っていない、若しくは方位角がある範囲に偏っていないという条件を満たすか否かにより測位精度を判定する。すなわち、頻度設定部33は、この条件を満たす場合、GPS測位処理の実行頻度を初期値に設定し、条件を満たさない場合、GPS測位処理の実行頻度を初期値よりも低く設定する。なお、設定される実行頻度は2種類には限られず、判定された測位精度の高低に応じて3種類以上あってもよい。
【0036】
ここで、衛星の捕捉数が4個に満たない場合や、仰角が低い又はある方向に偏った衛星を用いた場合、測位精度は低下する。したがって、頻度設定部33は、測位精度が高い場合には、測位頻度を高く(通常の頻度に)して、携帯電話機1の現在位置をより正確に取得させる。一方、頻度設定部33は、測位精度が低下した場合には、携帯電話機1の正確でない移動の軌跡を具体的にしないように、測位頻度を低くして、消費電力を抑制する。
【0037】
測位処理部34は、衛星の方向を示す補助情報に基づいて衛星を捕捉し、これらの捕捉した衛星から得られた信号に基づいて、GPS測位処理を所定の周期で、すなわち頻度設定部33により設定された実行頻度で実行する。
【0038】
このとき、測位処理部34は、強度取得部31により取得されたC/N値が所定値以上であり、かつ、方向取得部32により取得された仰角の範囲が所定以上の高度である衛星を所定数(例えば、4個)以上捕捉すると、十分な測位精度が得られると判断し、以降の衛星捕捉動作を行わない。
【0039】
また、測位処理部34は、通信部40により位置登録した基地局から得られる基地局識別情報に基づいて、頻度設定部33により設定された実行頻度に対応する移動が検知された場合に、GPS測位処理を実行する。一例として、測位処理部34は、実行頻度の高低に対応して、基地局識別情報のうち、セル情報、基地局ID又はシステムIDが変化した場合に、GPS測位処理を実行する。
【0040】
図3は、本実施形態に係る測位頻度に対応するGPS測位処理の実行タイミングを示す図である。この例では、測位頻度は3種類(高、中、低)設定可能である。
【0041】
測位頻度が「高」の場合、測位処理部34は、セル情報が変化したことを検出するとGPS測位処理を実行する。
測位頻度が「中」の場合、測位処理部34は、基地局IDが変化したことを検出するとGPS測位処理を実行する。
測位頻度が「低」の場合、測位処理部34は、システムIDが変化したことを検出するとGPS測位処理を実行する。
【0042】
1つのシステムには複数の基地局が含まれ、1つの基地局には複数のセルが含まれるという関係にあるので、セル、基地局、システムの順に領域面積が広がる。面積が広いほど、領域間の移動頻度が低下するので、測位処理部34は、いずれの変化を検出するのかを切り替えることにより、GPS測位処理の実行頻度を調整できる。
【0043】
優先度設定部35は、捕捉した衛星について、強度取得部31により取得されたC/N値が所定値以上であり、かつ、方向取得部32により取得された仰角の範囲が所定以上の高度で天空にある場合、すなわち、位置情報を算出する上で有効な衛星である場合、この衛星の捕捉優先度を上位に設定する。
【0044】
また、優先度設定部35は、捕捉できなかった衛星について、方向取得部32により取得された方向がある領域に偏っている場合、この方向に衛星電波を遮断する障害物があると判断し、捕捉を試行していなくても、この領域内にあると予測される他の衛星の捕捉優先度を下位に設定する。
【0045】
さらに、優先度設定部35は、強度取得部31により取得されたC/N値が所定値以上であり、かつ、方向取得部32により取得された仰角が所定以下の高度である衛星が捕捉された場合、この衛星電波は信頼性が低いと判断する。すなわち、通常、仰角が低い方向にある衛星のC/N値は低くなるが、逆にC/N値が高くなっている場合、例えば、マルチパス等の影響を受けており、正しい信号でない可能性が高い。すると、優先度設定部35は、この衛星の近隣領域にあると予測される衛星の捕捉優先度も下位に設定する。
【0046】
また、優先度設定部35は、所定以上の高度であると予測される衛星が捕捉できなかった場合、この衛星の方向に障害物があると判断する。そして、優先度設定部35は、この衛星と方位角が近似し、かつ、この衛星よりも低い高度にあると予測される衛星の捕捉優先度を下位に設定する。
【0047】
図4は、本実施形態に係る制御部30における処理を示すフローチャートである。なお、本処理は、設定された実行頻度に応じて繰り返し実行される。
【0048】
ステップS1において、制御部30(測位処理部34)は、GPS測位処理を実行する。なお、処理内容は後述する(図5)。
【0049】
ステップS2において、制御部30は、携帯電話機1の電池残量が閾値以下であるか、又は消費電力を抑制するモードであるか否かを判定する。制御部30は、この判定がYESの場合、測位周期を調整して消費電力を抑制するため、処理をステップS3に移し、判定がNOの場合、処理をステップS6に移す。
【0050】
ステップS3において、制御部30(頻度設定部33)は、C/N値が閾値以上の衛星を4個以上捕捉できたか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS4に移し、判定がNOの場合、処理をステップS7に移す。
【0051】
ステップS4において、制御部30(頻度設定部33)は、捕捉に成功した衛星の仰角の範囲が低い高度(α度以下又はβ度以上)に偏っているか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS7に移し、判定がNOの場合、処理をステップS5に移す。
【0052】
ステップS5において、制御部30(頻度設定部33)は、捕捉に成功した衛星の方位角の範囲がある領域に偏っているか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS7に移し、判定がNOの場合、処理をステップS6に移す。
【0053】
ステップS6において、制御部30(頻度設定部33)は、GPS測位処理の精度が十分にあると判断し、測位頻度を標準(初期値)に設定する。
【0054】
ステップS7において、制御部30(頻度設定部33)は、GPS測位処理の精度が十分でないと判断し、測位頻度を低く設定する。
【0055】
図5は、本実施形態に係る制御部30におけるGPS測位処理を示すフローチャートである。なお、本処理は、図4のステップS1に相当する。
【0056】
ステップS11において、制御部30(測位処理部34)は、捕捉対象である衛星リストの先頭の、最も優先度が高い衛星を選択する。
【0057】
ステップS12において、制御部30(測位処理部34)は、衛星カウンタを0にリセットする。この衛星カウンタは、信頼性が高い衛星を捕捉した数を示し、4個に達すると十分な測位精度が得られる。
【0058】
ステップS13において、制御部30(測位処理部34)は、選択した衛星の電波に基づいて、所定の方式により衛星測位を実行する。
【0059】
ステップS14において、制御部30(測位処理部34)は、衛星電波のC/N値が閾値以上であるか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS15に移し、判定がNOの場合、処理をステップS18に移す。
【0060】
ステップS15において、制御部30(測位処理部34)は、衛星の仰角が高い高度(α度以上β度以下)であるか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS16に移し、判定がNOの場合、処理をステップS18に移す。
【0061】
ステップS16において、制御部30(優先度設定部35)は、選択した衛星の信頼性が高いので、衛星リストの先頭(又は上位)に設定する。
【0062】
ステップS17において、制御部30(測位処理部34)は、衛星カウンタをカウントアップ(+1)する。
【0063】
ステップS18において、制御部30(測位処理部34)は、衛星カウンタが4以上であるか否かを判定する。制御部30は、この判定がYESの場合、十分な測位精度が得られる数の衛星を捕捉したので、衛星の捕捉を終了して、処理をステップS21に移す。一方、判定がNOの場合、制御部30は、処理をステップS19に移す。
【0064】
ステップS19において、制御部30(測位処理部34)は、衛星リストから次に優先度が高い衛星を選択する。
【0065】
ステップS20において、制御部30(測位処理部34)は、衛星リストにある全ての衛星による測位が完了したか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS21に移し、判定がNOの場合、処理をステップS13に移す。
【0066】
ステップS21において、制御部30(優先度設定部35)は、衛星リストの並べ替え処理を実行する。なお、処理内容は後述する(図6)。
【0067】
図6は、本実施形態に係る制御部30における衛星リストの並べ替え処理を示すフローチャートである。なお、本処理は、図5のステップS21に相当する。
【0068】
ステップS31において、制御部30(優先度設定部35)は、捕捉に失敗した衛星の予測位置があるエリア(仰角及び方位角が近似する領域)に偏っているか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS32に移し、判定がNOの場合、処理をステップS33に移す。
【0069】
ステップS32において、制御部30(優先度設定部35)は、ステップS31で判定されたエリアに位置すると予測される衛星を、衛星リストの最後方(又は下位)に設定する。
【0070】
ステップS33において、制御部30(優先度設定部35)は、捕捉に失敗した衛星の予測位置がある仰角より高い位置であるか否かを判定する。制御部30は、この判定がYESの場合、処理をステップS34に移し、判定がNOの場合、処理をステップS35に移す。
【0071】
ステップS34において、制御部30(優先度設定部35)は、ステップS33で高い位置にあると判定された衛星と近隣の所定範囲の方位角で、この衛星よりも仰角が低い位置にあると予測される衛星を、衛星リストの最後方(又は下位)に設定する。
【0072】
ステップS35において、制御部30(優先度設定部35)は、捕捉に成功した衛星のC/N値が閾値以上で、かつ、仰角が低い(α度以下又はβ度以上)か否かを判定する。制御部30は、この判定がYESの場合、処理をステップS36に移し、判定がNOの場合、処理を終了する。
【0073】
ステップS36において、制御部30(優先度設定部35)は、ステップS35で低い位置にありC/N値が高いと判定された衛星の周辺の、所定範囲に位置すると予測される衛星を、衛星リストの最後方(又は下位)に設定する。
【0074】
以上のように、本実施形態によれば、携帯電話機1は、衛星から得られる信号の受信強度(C/N値)と方向(仰角及び方位角)に基づいて、GPS測位処理の測位精度を判定し、GPS測位処理の実行頻度を設定できる。したがって、携帯電話機1は、連続してGPS測位を行う場合、測位精度が高ければ、測位頻度を高くして現在位置をより正確に取得する一方、測位精度が低ければ、測位頻度を低くして正確でない移動の軌跡が具体的になるのを抑制すると共に、消費電力を抑制できる。その結果、携帯電話機1は、GPS測位における利用者の利便性を損なうことなく、より省電力を実現できる。
【0075】
また、具体的には、携帯電話機1は、C/N値が高い衛星を4個以上捕捉できない場合、捕捉に成功した衛星が低い位置にある場合、又は捕捉に成功した衛星がある方位に偏っている場合には、測位頻度を低下させる。したがって、携帯電話機1は、これらの条件により不正確と判断される測位情報を、必要以上に頻繁に取得することなく、省電力を実現できる。
【0076】
また、携帯電話機1は、衛星の受信強度及び方向に関する測位環境に応じて、位置情報を算出する上で信頼性の高い衛星を表す優先度を設定し、効率的にGPS測位処理を実行できる。
【0077】
具体的には、携帯電話機1は、高い位置にあってC/N値が高い衛星の優先度を上位にする一方で、捕捉できなかった衛星が偏っている領域、低い位置であるのにC/N値が高い衛星の周辺、及び高い位置にあるのに捕捉できなかった衛星よりも低い位置にある衛星の優先度を下位に設定する。したがって、携帯電話機1は、捕捉を試行していない衛星に関しても、周囲の衛星の捕捉状況に応じて優先度を設定でき、信頼性の高い衛星を優先的に用いて効率的にGPS測位処理を実行できる。
【0078】
さらに、携帯電話機1は、位置登録した基地局から得られる基地局識別情報、具体的には、例えば、セル情報、基地局ID、システムID等に基づいて、設定された測位頻度によるGPS測位処理の実行タイミングを検出する。したがって、携帯電話機1は、移動の軌跡を取得する場合に、測位精度に応じて適切な移動距離ごとにGPS測位処理を実行できる。
【0079】
なお、GPS測位処理の実行タイミングを検出する情報は、これらには限られず、例えば、チャネル情報の切り替えタイミング等、状況に応じて適宜設定可能である。
【0080】
以上、好適な実施形態について説明したが、本発明は前述した実施形態に限定されることなく種々の形態で実施することができる。また、前述の実施形態に記載された効果は、本発明から生じる最も好適な効果を列挙したに過ぎず、本発明による効果は、前述のものに限定されない。
【0081】
前述の実施形態において、無線端末装置として携帯電話機1について説明しているが、無線端末装置はこれに限定されず、本発明は、PHS(登録商標;Personal Handy phone System)、PDA(Personal Digital Assistant)、ゲーム機、ナビゲーション装置、パーソナルコンピュータ等の他、通信機能に特化した通信専用モジュール等、様々な装置に適用可能である。
【符号の説明】
【0082】
1 携帯電話機(無線端末装置)
11 操作部
21 表示部
30 制御部
31 強度取得部
32 方向取得部
33 頻度設定部
34 測位処理部
35 優先度設定部
40 通信部
41 メインアンテナ
50 GPS通信部
51 GPSアンテナ
60 音声制御部
70 記憶部
【特許請求の範囲】
【請求項1】
衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理部と、
前記捕捉した衛星から得られる信号の受信強度を取得する強度取得部と、
前記捕捉した衛星の仰角及び方位角を取得する方向取得部と、
前記強度取得部により取得された受信強度、及び前記方向取得部により取得された方向に基づいて、前記GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定部と、を備える無線端末装置。
【請求項2】
前記頻度設定部は、前記強度取得部により取得された受信強度が所定値以上の衛星が所定数以上捕捉され、かつ、前記方向取得部により取得された仰角が所定以下の高度に偏っていない、若しくは方位角がある範囲に偏っていない条件を満たす場合、前記GPS測位処理の実行頻度を初期値に設定し、当該条件を満たさない場合、前記GPS測位処理の実行頻度を前記初期値よりも低く設定する請求項1に記載の無線端末装置。
【請求項3】
前記測位処理部は、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角の範囲が所定以上の高度である衛星を所定数以上捕捉すると、以降の衛星捕捉動作を行わない請求項1又は請求項2に記載の無線端末装置。
【請求項4】
前記捕捉した衛星について、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角の範囲が所定以上の高度である場合、当該衛星の捕捉優先度を上位に設定する優先度設定部をさらに備える請求項1から請求項3のいずれか1項に記載の無線端末装置。
【請求項5】
前記優先度設定部は、捕捉できなかった衛星について前記方向取得部により取得された方向がある領域に偏っている場合、当該領域内にあると予測される衛星の捕捉優先度を下位に設定する請求項4に記載の無線端末装置。
【請求項6】
前記優先度設定部は、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角が所定以下の高度である衛星が捕捉された場合、当該衛星の近隣領域にあると予測される衛星の捕捉優先度を下位に設定する請求項4又は請求項5に記載の無線端末装置。
【請求項7】
前記優先度設定部は、所定以上の高度であると予測される衛星が捕捉できなかった場合、当該衛星と方位角が近似し、かつ、当該衛星よりも低い高度にあると予測される衛星の捕捉優先度を下位に設定する請求項4から請求項6のいずれか1項に記載の無線端末装置。
【請求項8】
前記測位処理部は、位置登録した基地局から得られる基地局識別情報に基づいて、前記頻度設定部により設定された実行頻度に対応する移動が検知された場合に、GPS測位処理を実行する請求項1から請求項7のいずれか1項に記載の無線端末装置。
【請求項9】
前記測位処理部は、前記実行頻度に対応して、前記基地局識別情報のうち、セル情報、基地局ID又はシステムIDが変化した場合に、GPS測位処理を実行する請求項8に記載の無線端末装置。
【請求項10】
GPS測位機能を有する無線端末装置の制御方法であって、
衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理ステップと、
前記捕捉した衛星から得られる信号の受信強度を取得する強度取得ステップと、
前記捕捉した衛星の仰角及び方位角を取得する方向取得ステップと、
前記強度取得ステップにおいて取得された受信強度、及び前記方向取得ステップにおいて取得された方向に基づいて、前記GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定ステップと、を含む制御方法。
【請求項1】
衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理部と、
前記捕捉した衛星から得られる信号の受信強度を取得する強度取得部と、
前記捕捉した衛星の仰角及び方位角を取得する方向取得部と、
前記強度取得部により取得された受信強度、及び前記方向取得部により取得された方向に基づいて、前記GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定部と、を備える無線端末装置。
【請求項2】
前記頻度設定部は、前記強度取得部により取得された受信強度が所定値以上の衛星が所定数以上捕捉され、かつ、前記方向取得部により取得された仰角が所定以下の高度に偏っていない、若しくは方位角がある範囲に偏っていない条件を満たす場合、前記GPS測位処理の実行頻度を初期値に設定し、当該条件を満たさない場合、前記GPS測位処理の実行頻度を前記初期値よりも低く設定する請求項1に記載の無線端末装置。
【請求項3】
前記測位処理部は、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角の範囲が所定以上の高度である衛星を所定数以上捕捉すると、以降の衛星捕捉動作を行わない請求項1又は請求項2に記載の無線端末装置。
【請求項4】
前記捕捉した衛星について、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角の範囲が所定以上の高度である場合、当該衛星の捕捉優先度を上位に設定する優先度設定部をさらに備える請求項1から請求項3のいずれか1項に記載の無線端末装置。
【請求項5】
前記優先度設定部は、捕捉できなかった衛星について前記方向取得部により取得された方向がある領域に偏っている場合、当該領域内にあると予測される衛星の捕捉優先度を下位に設定する請求項4に記載の無線端末装置。
【請求項6】
前記優先度設定部は、前記強度取得部により取得された受信強度が前記所定値以上であり、かつ、前記方向取得部により取得された仰角が所定以下の高度である衛星が捕捉された場合、当該衛星の近隣領域にあると予測される衛星の捕捉優先度を下位に設定する請求項4又は請求項5に記載の無線端末装置。
【請求項7】
前記優先度設定部は、所定以上の高度であると予測される衛星が捕捉できなかった場合、当該衛星と方位角が近似し、かつ、当該衛星よりも低い高度にあると予測される衛星の捕捉優先度を下位に設定する請求項4から請求項6のいずれか1項に記載の無線端末装置。
【請求項8】
前記測位処理部は、位置登録した基地局から得られる基地局識別情報に基づいて、前記頻度設定部により設定された実行頻度に対応する移動が検知された場合に、GPS測位処理を実行する請求項1から請求項7のいずれか1項に記載の無線端末装置。
【請求項9】
前記測位処理部は、前記実行頻度に対応して、前記基地局識別情報のうち、セル情報、基地局ID又はシステムIDが変化した場合に、GPS測位処理を実行する請求項8に記載の無線端末装置。
【請求項10】
GPS測位機能を有する無線端末装置の制御方法であって、
衛星の方向を示す補助情報に基づいて当該衛星を捕捉し、当該捕捉した衛星から得られた信号に基づいて、GPS測位処理を実行する測位処理ステップと、
前記捕捉した衛星から得られる信号の受信強度を取得する強度取得ステップと、
前記捕捉した衛星の仰角及び方位角を取得する方向取得ステップと、
前記強度取得ステップにおいて取得された受信強度、及び前記方向取得ステップにおいて取得された方向に基づいて、前記GPS測位処理の測位精度を判定し、当該GPS測位処理の実行頻度を設定する頻度設定ステップと、を含む制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2012−21850(P2012−21850A)
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願番号】特願2010−159046(P2010−159046)
【出願日】平成22年7月13日(2010.7.13)
【出願人】(000006633)京セラ株式会社 (13,660)
【Fターム(参考)】
【公開日】平成24年2月2日(2012.2.2)
【国際特許分類】
【出願日】平成22年7月13日(2010.7.13)
【出願人】(000006633)京セラ株式会社 (13,660)
【Fターム(参考)】
[ Back to top ]