
無線通信システム
【課題】携帯機のコイルアンテナ特性に着目して、LF受信回路に故障検出機能を設けることにより、コストアップを招くことなく携帯機故障を容易に検知可能な無線通信システムを得る。
【解決手段】携帯機2は、CPU20と、複数の受信アンテナ26a〜26cおよびLF受信回路24と、複数の受信アンテナ26a〜26cごとに受信電界強度を測定するRSSI回路2402と、を備える。複数の受信アンテナ26a〜26cは、互いに磁束検出方向の異なるコイルアンテナからなる。CPU20は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値の相互比較結果に基づいて、複数の受信アンテナ26a〜26cのいずれかの故障状態を検出する故障検出手段を含む。
【解決手段】携帯機2は、CPU20と、複数の受信アンテナ26a〜26cおよびLF受信回路24と、複数の受信アンテナ26a〜26cごとに受信電界強度を測定するRSSI回路2402と、を備える。複数の受信アンテナ26a〜26cは、互いに磁束検出方向の異なるコイルアンテナからなる。CPU20は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値の相互比較結果に基づいて、複数の受信アンテナ26a〜26cのいずれかの故障状態を検出する故障検出手段を含む。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、車両に搭載された車載無線通信装置(以下、「車載機」という)と、ユーザによって携帯される携帯無線通信装置(以下、「携帯機」という)とを備えた無線通信システムに関し、特に、故障による通信性能の低下を防止できるスマートキーレスエントリシステムを実現するための技術に関するものである。
【背景技術】
【0002】
従来から、車両のドアの施錠や解錠を、ユーザの携帯機からの遠隔操作によって行うキーレスエントリシステムが知られている。
また、携帯機を操作することなく、ドアの施錠や解錠を行うスマートキーレスエントリシステムも良く知られている(たとえば、特許文献1参照)。
【0003】
特許文献1においては、車載機および携帯機を有するキーレスエントリシステムにおいて、携帯機に内蔵されたRSSI(Received Signal Strength Indicator:受信信号強度測定器)機能を使用して、携帯機と車載機との距離を測定し、あらかじめ定められた距離閾値を超えるか否かに応じて、ドアの施解錠の許可または禁止や、イグニション操作の許可または禁止を判定している。
【0004】
ところで、上記従来システムにおいては、車載機と携帯機との間でLF(Low Frequency)通信を行う際に、携帯機が故障検出(診断)機能を備えていないので、携帯機を落下した際の衝撃による故障や出荷後の経年劣化による故障が発生した場合に、車両のユーザは、スマートキーレスエントリシステムの動作異常によって気付く場合を除いて、故障発生を認識することができない。すなわち、携帯機が全く機能しなければ、ユーザは直ちに異常に気付くことができる。
【0005】
しかし、携帯機のLF受信回路は、携帯機の向きの違いによる受信感度低下を回避するために、通常は、互いにアンテナコイルの向きを90度ずらした3系統の受信アンテナと、各受信アンテナに対応した受信回路とを備えているので、すべての受信アンテナ系統が同時に故障せずに部分的に故障する場合が考えられる。
【0006】
このように、携帯機の受信機能が部分的に故障した場合には、スマートキーレスエントリシステムとして、特定の携帯機の向きで受信感度が低下するものの完全に通信不能には至らず、それなりに動作し続けるので、ユーザはシステムの故障に気付きにくい。
【0007】
また、スマートキーレスエントリシステムにおいては、3系統の受信アンテナの受信電界強度(RSSI値)を測定し、3系統のアンテナの受信電界強度のベクトル和に基づき送信アンテナからの距離を求めることにより、車両に対する携帯機の位置を推定してスマートキーレスエントリシステムの動作に反映させている。
【0008】
たとえば、携帯機が車内に位置すると推定された場合には、施錠要求に対して携帯機の車内閉じ込め警告を発するなどの警報動作判定に利用している。
また、携帯機が車外に位置すると推定された場合には、車両の駆動動力源(エンジンやモータ)の始動操作を受け付けない、などの制御判定に利用している。
【0009】
したがって、携帯機の受信機能に部分的な故障が発生した場合でも、正しく携帯機の位置が検出することができず、スマートキーレスエントリシステムとしては、誤った判定結果に基づいて誤動作する可能性がある。
【0010】
このような誤判定が発生する条件としては、車両における携帯機の位置、携帯機の故障により生じる携帯機の位置推定のズレ量、携帯機の向きによる受信信号を故障受信系統アンテナが受ける割合などがあげられ、異常動作の再現が難しい場合も多い。
【0011】
したがって、ユーザは、スマートキーレスエントリシステムの動作時に違和感を覚えても、故障と判断することができずに放置する状況が起こり、たまたま悪条件が揃った際に、無視できない程度のスマートキーレスエントリシステムの誤判定(携帯機の閉じ込めなど)が発生し、不満を覚えることが想定される。
【0012】
さらに、受信用の3系統のうちの1系統は、携帯機の電池が切れた場合の応急用のトランスポンダ(transponder)送受信用と兼用している場合が多く、この兼用系統が故障した場合に気付かないで放置していると、携帯機の電池切れの際に応急措置がとれず、ユーザが車両を動かすことが困難になってしまう。
【0013】
また、上記のように、携帯機の受信機能に関する簡便な故障検出手段を備えていない従来システムにおいては、ユーザがスマートキーレスエントリシステム動作に違和感を覚えて点検を依頼した際に、携帯機の故障を短時間に的確に見つけることは難しく、故障に対処できないことも想定される。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2006−319845号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
従来の無線通信システムは、複数の受信系統を有する携帯機の機能を診断する故障検出手段を備えていないので、複数系統のうちの一部機能が故障しても故障発生状態を検知することができず、種々の不具合が生じるという課題があった。
【0016】
また、仮に受信アンテナに故障検出用の回路を設けると、携帯機のLF受信回路が複雑になりコストアップを招くうえ、故障検出中にLF受信が不可能になるという課題があった。
さらに、故障発生に備えて、仮に携帯機の電池切れ時の対処用に独立したLF通信系を準備すると、携帯機のコストアップおよび大型化を招くうえ、外観設計の自由度を損なうという課題があった。
【0017】
この発明は、上記のような課題を解決するためになされたものであり、特に構造を複雑化せずに、携帯機のコイルアンテナ特性に着目して、LF受信回路およびCPUに故障検出機能を設けることにより、コストアップを招くことなく、ユーザが判断しにくいスマートキーレスエントリシステムの携帯機故障を容易に検知可能な無線通信システムを得ることを目的とする。
【課題を解決するための手段】
【0018】
この発明に係る無線通信システムは、車両に搭載された無線通信機能を有する車載機と、車両のユーザによって携帯され、車載機との間で無線通信機能を有する携帯機とにより構成される無線通信システムであって、車載機は、車載機CPUと、認証コードを記憶する車載機メモリと、電界強度測定用信号および認証要求信号を携帯機に送信するLF送信回路と、携帯機からの認証応答信号を受信する受信回路と、を備え、車載機CPUは、携帯機から受信した認証応答信号に含まれる認証コードと、車載機メモリ内の認証コードとの照合を行い、携帯機は、携帯機CPUと、認証コードを記憶する携帯機メモリと、電界強度測定用信号および認証要求信号を受信する複数の受信アンテナおよびLF受信回路と、携帯機メモリ内の認証コードおよび認証応答信号を車載機に送信する送信回路と、複数の受信アンテナごとに電界強度測定用信号の受信電界強度を測定する電界強度測定部と、を備え、携帯機の複数の受信アンテナは、互いに磁束検出方向の異なるコイルアンテナからなり、携帯機CPUは、複数の受信アンテナごとの各受信電界強度測定値の相互比較結果に基づいて、複数の受信アンテナのいずれかの故障状態を検出する故障検出手段を含むものである。
【発明の効果】
【0019】
この発明によれば、スマートキーレスシステムに適用される無線通信システムにおいて、たとえ違和感があってもユーザによる故障判定が困難な、携帯機の一部の受信アンテナの故障を多大なコストを要することなく検出することができる。
【図面の簡単な説明】
【0020】
【図1】この発明の実施の形態1に係る無線通信システム(スマ−トキーレスエントリシステム)を概略的に示す平面構成図である。
【図2】図1内の車載機の回路構成を示すブロック図である。
【図3】図1内の携帯機の回路構成を示すブロック図である。
【図4】図3内の受信アンテナのコイル構造の第1段階を示す斜視図である。
【図5】図3内の受信アンテナのコイル構造の第2段階を示す斜視図である。
【図6】図3内の受信アンテナのコイル構造の第3段階を示す斜視図である。
【図7】この発明の実施の形態1による受信アンテナの故障検出処理を示すフローチャートである。
【図8】この発明の実施の形態1による受信アンテナの故障検出処理を示すタイミングチャートである。
【図9】この発明の実施の形態2による受信アンテナの故障検出処理を示すフローチャートである。
【図10】この発明の実施の形態2による受信アンテナの故障検出処理を示すタイミングチャートである。
【図11】この発明の実施の形態3による受信アンテナの故障検出処理を示すフローチャートである。
【図12】この発明の実施の形態3による受信アンテナの故障検出処理を示すタイミングチャートである。
【発明を実施するための形態】
【0021】
実施の形態1.
以下、図1〜図3を参照しながら、この発明の実施の形態1に係る無線通信システムについて、スマートキーレスエントリシステムの場合を例にとって詳細に説明する。
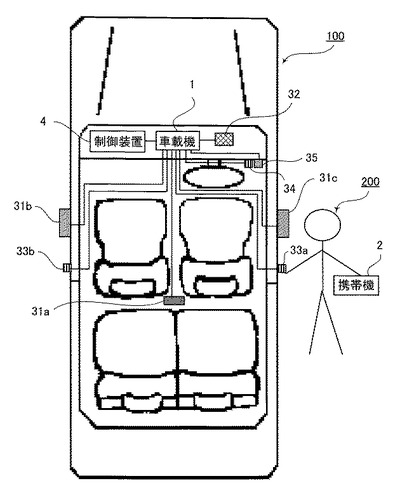
図1はこの発明の実施の形態1に係るスマートキーレスエントリシステムを概略的に示す平面構成図である。
【0022】
図1において、スマートキーレスエントリシステムは、概して、車両100に搭載された車載機1と、車両100のユーザ200が携帯する携帯機2とにより構成される。
車両100には、車載機1と協働する他の回路要素として、制御装置4と、LF送信アンテナ31a〜31cと、RF受信アンテナ32と、リクエストスイッチ33a、33bと、スタートスイッチ34と、イモビライザ(Immobiliser)機能を実現するためのトランスポンダ通信用アンテナ35と、が設けられている。
【0023】
車載機1は、RF受信アンテナ32を介して、携帯機2からの遠隔操作信号を受信した際に、制御装置4を介してドアの解錠操作または施錠操作などを行う。
また、車載機1は、ユーザ200によるドアの開閉動作やリクエストスイッチ33a、33bまたはスタートスイッチ34の操作に応答して、LF送信アンテナ31a〜31cから携帯機2に対してLF信号の近距離送信を行い、携帯機2の位置検知などを行う。
【0024】
LF送信アンテナ31a〜31cは、車両100の車室内および左右ドア部に設置されており、リクエストスイッチ33a、33bは、ユーザ200が操作しやすいように車両100の左右ドア部に設置されている。
【0025】
LF送信アンテナ31a〜31cは、携帯機2に対して無線送信を行い、RF受信アンテナ32は、携帯機2からの無線送信を受信する。
リクエストスイッチ33a、33bは、ユーザ200の施錠および開錠の意思を受け付け、スタートスイッチ34は、ユーザ200の操作によるエンジン始動や走行スタンバイ状態への移行要求を受け付ける。
【0026】
トランスポンダ通信用アンテナ35は、携帯機2が電池切れの場合に、携帯機2との間で、イモビライザ機能を実現するためのトランスポンダ通信(携帯機2への電力供給を兼ねる)を行う。
制御装置4は、車両100のイグニションスイッチ(図示せず)に関する制御を行うとともに、車両100のドアの施錠および解錠を制御する。
【0027】
図1に示したスマートキーレスエントリシステムにおいて、車載機1は、携帯機2から送られてくる信号を受信し、受信信号の内容に応じて、イグニッション操作の許可または禁止を判定し、制御装置4に対してイグニション操作の許可または禁止を指示する。
【0028】
また、車載機1は、携帯機2からの受信信号の内容に応じて、ドアの施錠または解錠を判定し、制御装置4に対してドアの施錠または解錠を指示する。
さらに、車載機1は、携帯機2からの受信信号の内容に応じて、携帯機2が車載機1との操作許可圏内に位置するか否かを判定し、制御装置4に対して、警報用ブザー(図示せず)の駆動許可または駆動禁止や、警告用ランプ(図示せず)の点灯または消灯を指示する。
【0029】
なお、以下の説明において、車載機1から携帯機2への通信は、LF通信方式(Low Frequency Communication Method)を使用し、変調処理後の信号を使用するものとする。
【0030】
また、携帯機2から車載機1への通信は、代表的に、最も一般的なRF通信方式(Radio Frequency Communication Method)を使用し、変調処理後の信号を使用するものとする。
さらに、携帯機2の電池が切れの場合に備え、車載機1と携帯機2との間で双方向LF通信(以下、「トランスポンダ通信」という)を使用するものとする。
【0031】
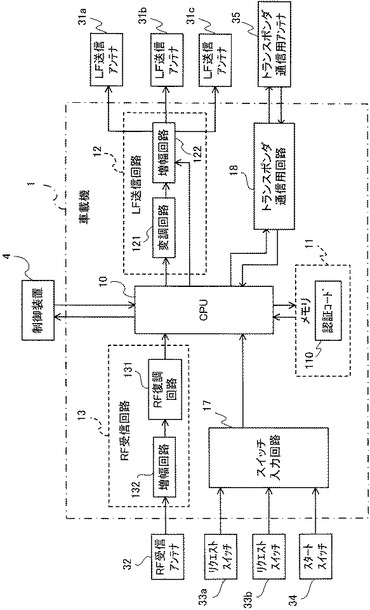
図2は図1内の車載機1の回路構成を示すブロック図であり、前述(図1参照)と同様のものについては、前述と同一符号を付して詳述を省略する。
図2において、車載機1は、各種演算処理機能を有する車載機CPU10(以下、単に「CPU10」という)と、CPU10に属するROMおよびRAMを含む車載機メモリ11(以下、単に「メモリ11」という)と、LF送信回路12と、RF受信回路13と、スイッチ入力回路17と、トランスポンダ通信用回路18とを備えている。
【0032】
CPU10には、LF送信回路12を介してLF送信アンテナ31a〜31cが接続され、RF受信回路13を介してRF受信アンテナ32が接続され、スイッチ入力回路17を介してリクエストスイッチ33a、33bおよびスタートスイッチ34が接続され、トランスポンダ通信用回路18を介してトランスポンダ通信用アンテナ35が接続されている。
【0033】
メモリ11内には、携帯機2から送信されてくる認証応答信号のデータを認証する(後述する認証コード220の照合を行う)ための認証コード110が記憶されており、メモリ11は、受信データの認証時に認証コード110をCPU10に入力する。
なお、メモリ11内には、トランスポンダ通信時の認証コード(図示せず)も記憶されるが、認証コード110は、トランスポンダ通信時の認証コードにも兼用され得る。
【0034】
CPU10は、車載機1の統合的な制御を行い、あらかじめメモリ11に記憶されたプログラムを実行することにより各種機能を実現する。
【0035】
LF送信回路12は、変調回路121および増幅回路122を備えている。
LF送信回路12内の変調回路121は、CPU10からの送信信号(電界強度測定用信号および認証要求信号)をLF周波数帯の搬送波で変調し、変調後の送信信号を生成する。
また、LF送信回路12内の増幅回路122は、変調回路121により変調された送信信号を増幅してLF送信アンテナ31a〜31cに送る。
【0036】
LF送信アンテナ31a〜31cは、増幅後の送信信号を気中に送信する。
3つのLF送信アンテナ31a〜31cのうち、1つのLF送信アンテナ31aは、車両100の車室内への送信に使用され、他の2つのLF送信アンテナ31b、31cは、車外への送信に使用される。
【0037】
RF受信回路13は、RF復調回路131および増幅回路132を備えている。
RF受信回路13内の増幅回路132は、気中の無線信号を受信するRF受信アンテナ32に接続され、RF受信アンテナ32から入力される受信信号を増幅する。
RF復調回路131は、増幅後の受信信号を復調し、得られた復調信号をCPU10に入力する。
【0038】
トランスポンダ通信用回路18は、CPU10からの送信指令に応答して、携帯機2へのLF送信信号を生成し、トランスポンダ通信用アンテナ35は、LF送信信号を気中に送信する。
また、トランスポンダ通信用回路18は、トランスポンダ通信用アンテナ35を介して受信した気中の無線信号を復調してCPU10に入力する。
【0039】
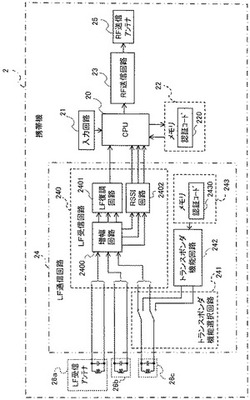
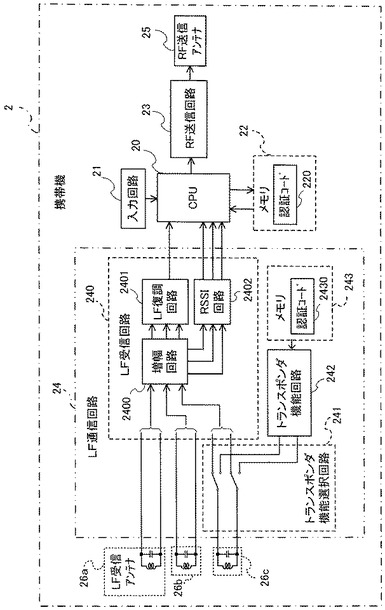
図3は図1内の携帯機2の回路構成を示すブロック図である。
図3において、携帯機2は、各種演算処理機能を有する携帯機CPU20(以下、単に「CPU20」という)と、ユーザ200の操作信号をCPU20に入力する入力回路21と、CPU20に属するROMおよびRAMを含む携帯機メモリ22(以下、単に「メモリ22」という)と、RF送信回路23と、LF通信回路24と、RF送信アンテナ25と、LF受信アンテナ26a、26b(以下、単に「受信アンテナ26a、26b」または「アンテナ26a、26b」という)と、トランスポンダ通信兼用のLF受信アンテナ26c(以下、単に「受信アンテナ26c」または「アンテナ26c」という)と、を備えている。
【0040】
LF通信回路24内において、トランスポンダ機能選択回路241およびトランスポンダ機能回路242は、通常時には動作せず、携帯機2が電池切れの際のみに車載機1側からの送信電力に応答して動作する。
各アンテナ26a〜26cは、後述の図4〜図6に示すように、互いに磁束検出方向の異なるコイルアンテナからなる。
また、アンテナ26cは、トランスポンダ機能選択回路241およびトランスポンダ機能回路242によるトランスポンダ通信機能が有効化された際には、送受信アンテナとして機能する。
【0041】
CPU20は、携帯機2の統合的な制御を行い、あらかじめメモリ22内に記憶されたプログラムを実行することにより各種機能を実現する。
メモリ22内のROMには、認証コード220があらかじめ記憶されている。認証コード220は、携帯機2から車載機1への送信時に、車載機1において携帯機2を認証する(認証コード110と照合する)ために必要なデータである。
【0042】
RF送信回路23は、CPU20からの送信信号に基づき、RF周波数帯の搬送波を変調した送信信号(認証コード220、認証応答信号および電界強度測定値)を生成し、RF送信アンテナ25は、RF送信回路23からの送信信号を気中に送信する。
【0043】
なお、ここでは図示を省略するが、RF送信回路23は、CPU20からの送信信号をRF周波数帯の搬送波で変調する変調回路と、変調後の送信信号を増幅する増幅回路とを備えている。
【0044】
LF通信回路24は、LF受信回路240と、トランスポンダ機能選択回路241と、トランスポンダ機能回路242と、トランスポンダ機能回路242に属するメモリ243とを備えている。
【0045】
メモリ243内には、認証コード2430が記憶されており、トランスポンダ機能回路242が有効化されたときに、メモリ243内の認証コード2430がトランスポンダ機能回路242に入力される。このとき、認証コード2430は、アンテナ26cを介して車載機1に送信される。
【0046】
なお、図2においては、CPU20に接続されたメモリ22と、トランスポンダ機能回路242に接続されたメモリ243とを、個別に構成した例を示しているが、トランスポンダ機能用のメモリ243を、車載機1への認証応答用のメモリ22を兼用してもよい。
この場合、CPU20は、メモリ243にアクセス可能となり、構成認証コード220は認証コード2430と同一値となるので、メモリ22内の認証コード220は不要となる。
【0047】
LF受信回路240は、増幅回路2400と、LF復調回路2401と、RSSI(Received Signal Strength Indicator)回路2402とを備えている。
増幅回路2400およびRSSI回路2402は、それぞれ、各受信アンテナ26a〜26cに対応して並列構成されているものとする。
【0048】
増幅回路2400は、気中の無線信号を受信するアンテナ26a〜26cからの受信信号を増幅する。
LF復調回路2401は、増幅後の受信信号を復調し、得られた復調信号をCPU20に入力する。
【0049】
RSSI回路2402は、増幅回路2400での増幅度合いに基づき、各アンテナ26a〜26cの受信電界強度(RSSI値Ra〜Rc)を測定し、受信電界強度信号をCPU20に入力する。
【0050】
トランスポンダ機能選択回路241は、アンテナ26cからの気中の無線信号に基づきトランスポンダ通信用の電力供給を検出すると、アンテナ26cの入力経路を、LF受信回路240の選択状態(図3に示した状態)からトランスポンダ機能回路242へと切り替え接続し、LF通信回路24をトランスポンダ機能動作に切替える。
【0051】
トランスポンダ機能回路242は、トランスポンダ機能選択回路241がトランスポンダ機能動作を選択した際に、気中の無線信号を受信するアンテナ26cから入力される受信信号と、認証コード2430とに基づき、車載機1と携帯機2とが相互認証を行うのに必要な暗号演算を行い、演算結果をアンテナ26cから気中へと無線送信する。
相互認証するのに必要なデータである認証コード2430は、メモリ243のROMに記憶されている。
【0052】
入力回路21は、携帯機2のユーザ200による操作入力(ドアやトランクを施錠または解錠する操作入力など)を検出し、操作入力に応じた信号をCPU20に入力する。
【0053】
ここで、この発明の実施の形態1による携帯機2の故障検出原理について説明する。
スマートキーレスエントリシステムの携帯機2において、アンテナ26a〜26cは、互いに指向性による死角を補い合うように、各々のコイルの向きが互いにほぼ90度だけ異なるようにレイアウトされる。
このとき、アンテナ26a、26b、26cは、それぞれが独立部品で構成される場合と、複数のコイルが一体構成される場合がある。
【0054】
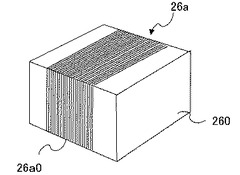
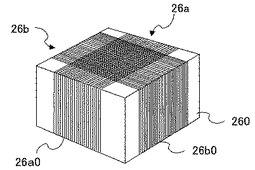
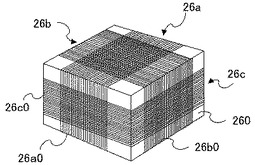
一例として、図4〜図6を参照しながら、3つのアンテナ26a〜26cが一体構成された場合のアンテナ構造について説明する。
図4〜図6は図3内のアンテナ26a〜26cのコイル構造を製造時の第1〜第3段階に分けて示す斜視図である。
【0055】
まず、図4のように、直方体(互いの面が90度)のコイルボビン260上の一方向に対し、アンテナ26aのコイル26a0が巻かれる。
次に、図5のように、コイルボビン260上の90度ずらした方向に、アンテナ26bのコイル26b0が巻かれる。
最後に、図6のように、コイルボビン260上のさらに90度ずらした方向に、アンテナ26cのコイル26c0が巻かれる。
【0056】
図6において、互いのアンテナ26a〜26cは、ほぼ90度ずつずれた方向に向いているが、携帯機2内の狭い空間にレイアウトされるので、アンテナ26a〜26cのいずれの相互間にも少なからず相互インダクタンスを持つことになる。
【0057】
たとえば、アンテナコイルが単独構成であって磁束がコイルを貫通しない方向の場合には、コイルに起電力が発生することはないが、図6のコイル構造からなる携帯機2の場合には、コイル26a0〜26c0のいずれかが磁束を受け続けて起電力が発生するうえ、上述の相互インダクタンスを持つので、磁束が通らないコイルにも常に僅かな起電力が発生し続けることになる。
【0058】
よって、強い磁界内に携帯機2を置いた場合には、どのアンテナコイルにも一定以上の起電力が発生するはずなので、起電力を発生しないアンテナコイルのコイルまたは増幅回路2400やRSSI回路2402が断線故障していると判定することができる。
逆に、比較的弱い磁界内に携帯機2を置いた場合には、強い磁界を検出しているアンテナコイルの増幅回路2400やRSSI回路2402が故障(受信電界強度測定値が実際よりも大きくなる故障など)していると判定することもできる。
【0059】
次に、図7および図8を参照しながら、図1〜図6に示したこの発明の実施の形態1による故障検出動作について、さらに具体的に説明する。
この発明の実施の形態1に係る無線通信システムの故障検出手段は、各アンテナ26a〜26cのコイル間の相互インダクタンスによる起電力の発生を利用したものである。
ここでは、具体例として、トランスポンダ通信兼用のアンテナ26cの断線故障を検出する場合を例にとって説明する。
【0060】
図7はこの発明の実施の形態1による受信アンテナ26cの故障検出処理を示すフローチャートであり、CPU20と協働するメモリ22内にあらかじめ記憶された断線故障検出プログラムを示している。
また、図8はこの発明の実施の形態1による受信アンテナ26cの故障検出処理を示すタイミングチャートである。
【0061】
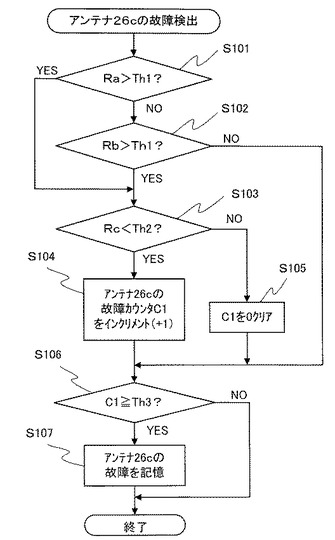
図7において、CPU20は、まず、RSSI回路2402から各アンテナ26a〜26cの受信電界強度(RSSI値Ra〜Rc)を取得して、第1の比較処理により、アンテナ26aのRSSI値Raが閾値Th1(強磁界判定用の基準値)よりも大きいか否かを判定し(ステップS101)、Ra>Th1(すなわち、YES)と判定されれば、第3の比較処理(ステップS103)に移行する。
【0062】
一方、ステップS101において、Ra≦Th1(すなわち、NO)と判定されれば、続いて、第2の比較処理により、アンテナ26bのRSSI値Rbが閾値Th1よりも大きいか否かを判定し(ステップS102)、Rb≦Th1(すなわち、NO)と判定されれば、故障判定処理(ステップS106)に移行する。
【0063】
一方、ステップS102において、Rb>Th1(すなわち、YES)と判定されれば、続いて、第3の比較処理により、アンテナ26cのRSSI値Rcが閾値Th2(強磁界下での最低起電力<Th1)よりも小さいか否かを判定する(ステップS103)。
【0064】
ステップS103において、Rc<Th2(すなわち、YES)と判定されれば、強磁界下の条件下にもかかわらず、アンテナ26cから最低起電力が得られていない状態なので、アンテナ26cの故障カウンタC1をインクリメント(+1)して(ステップS104)、故障判定処理(ステップS106)に移行する。
【0065】
一方、ステップS103において、Rc≧Th2(すなわち、NO)と判定されれば、アンテナ26cの故障カウンタC1を0クリアして(ステップS105)、故障判定処理(ステップS106)に移行する。
【0066】
ステップS106においては、故障カウンタC1の値が閾値Th3(実際の故障時に到達し得る回数)以上であるか否かを判定し、C1<Th3(すなわち、NO)と判定されれば、故障が発生していないものと見なし、図7の処理ルーチンを終了する。
【0067】
一方、ステップS106において、C1≧Th3(すなわち、YES)と判定されれば、アンテナ26cの断線故障と見なし、故障を記憶して(ステップS107)、図7の処理ルーチンを終了する。
【0068】
このように、アンテナ26cを故障判定対象とした場合、他のアンテナ26a、26bのRSSI値Ra、Rbのチェックを行い(ステップS101、S102)、いずれかのRSSI値が閾値Th1(強磁界判定閾値)を超えていれば、自身のアンテナ26cのRSSI値Rcのチェックを行う(ステップS103)。
【0069】
そして、アンテナ26cのRSSI値Rcが閾値Th2(強磁界下での最低起電力)に満たない場合には、故障カウンタC1をインクリメントし(ステップS104)、C1≧Th3に達した時点で(ステップS106)、故障状態を記憶する(ステップS107)。
【0070】
図7の断線故障検出プログラムは、RSSI回路2402からRSSI値(受信電界強度)がCPU20に入力されるごとに1回のみ実行される。
なお、図7内の故障判定処理や故障記憶処理(ステップS106、S107)は、携帯機2内のCPU20による実行に限らず、携帯機2と通信する車載機1内のCPU10で実行してもよい。
【0071】
車載機1内のCPU10で故障を判定する場合、携帯機2内のRSSI回路2402で測定された各RSSI値は、RF送信回路23およびRF送信アンテナ25から、RF受信アンテナ32を介して車載機1内のCPU10に入力されることになる。
【0072】
車載機1内のCPU10で故障判定を行う場合、携帯機2は、認証コード220および認証応答信号とともに、車載機1から受信した電界強度測定用信号の各アンテナ26a〜26cでのRSSI値(電界強度測定値)を、車載機1に送信すればよい。
【0073】
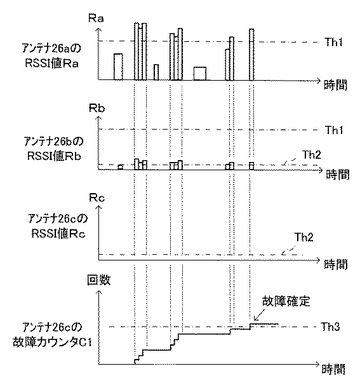
図8は故障検出処理(図7)の具体的な動作例を示している。
図8のタイミングチャートにおいては、アンテナ26aのRSSI値Raが強磁界を検出している状況下において、アンテナ26cに断線故障が発生し、アンテナ26cのRSSI値Rcが閾値Th2に満たない状態を示している。
図8において、故障していないアンテナ26bのRSSI値Rbは、閾値Th2以上のレベルを満たしている。
【0074】
一方、アンテナ26cのRSSI値Rcは閾値Th2に満たないので、アンテナ26cの故障カウンタC1は、アンテナ26aのRSSI値Raが閾値Th1を超えるごとに、アンテナ26cのRSSI値Rc<Th2の判定結果に応答してインクリメントし続け、C1≧Th3に達した時点で故障が確定される。
【0075】
なお、ここでは代表的に、3つのアンテナ26a〜26cのうち最も重要な、トランスポンダ兼用のアンテナ26cの故障判定処理を例にとって説明したが、他のアンテナ26a、26bの故障判定処理も同様に行うことができる。
【0076】
以上のように、この発明の実施の形態1(図1〜図8)に係る無線通信システムは、車両100に搭載された無線通信機能を有する車載機1と、車両100のユーザ200によって携帯され、車載機1との間で無線通信機能を有する携帯機2とにより構成されている。
【0077】
車載機1は、CPU10と、認証コード110を記憶するメモリ11と、電界強度測定用信号および認証要求信号を携帯機2に送信するLF送信回路12と、携帯機2からの認証応答信号を受信するRF受信回路13と、を備えている。
CPU10は、携帯機2から受信した認証応答信号に含まれる認証コード220と、メモリ11内の認証コード110との照合を行う。
【0078】
携帯機2は、CPU20と、認証コード220を記憶するメモリ22と、電界強度測定用信号および認証要求信号を受信する複数の受信アンテナ26a〜26cおよびLF受信回路240と、メモリ22内の認証コード220および認証応答信号を車載機1に送信するRF送信回路23およびRF送信アンテナ25と、複数の受信アンテナ26a〜26cごとに電界強度測定用信号の受信電界強度を測定するRSSI回路2402(電界強度測定部)と、を備えている。
【0079】
携帯機2の複数の受信アンテナ26a〜26cは、互いに磁束検出方向の異なるコイルアンテナからなる。
CPU20は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値の相互比較結果に基づいて、複数の受信アンテナ26a〜26cのいずれかの故障状態を検出する故障検出手段を含む。
【0080】
または、携帯機2のCPU20は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値を、RF送信回路23を介して車載機1に送信する。
この場合、車載機1のCPU10は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値の相互比較結果に基づいて、複数の受信アンテナ26a〜26cのいずれかの故障状態を検出する故障検出手段を含む。
【0081】
故障検出手段(図7、図8)は、複数の受信アンテナ26a〜26cのうちの少なくとも1つの受信アンテナ(たとえば、アンテナ26aまたは26b)の受信電界強度測定値(RaまたはRb)が閾値Th1(第1の閾値)を超えたときに、複数の受信アンテナ26a〜26cのうちの他の1つの受信アンテナ(たとえば、アンテナ26c)の受信電界強度測定値(Rc)が、閾値Th1よりも小さい閾値Th2(第2の閾値)に満たない場合に、他の1つの受信アンテナ(アンテナ26c)の故障(断線故障)を検出する。
【0082】
さらに、故障検出手段(図7、図8)は、少なくとも1つの受信アンテナの受信電界強度測定値(たとえば、RaまたはRb)が閾値Th1を超えたときに、他の1つの受信電界強度測定値(Rc)が閾値Th2に満たない場合に、カウント値をインクリメントする故障カウンタC1(第1の故障カウンタ)を有し、故障カウンタC1が閾値Th3(第3の閾値)に達した時点で、他の1つの受信アンテナ(たとえば、アンテナ26c)の故障(断線故障)を確定して記憶する。
【0083】
一方、この発明の実施の形態1による故障検出手段は、複数の受信アンテナ26a〜26cのうちの少なくとも2つの受信アンテナの受信電界強度測定値が第2の閾値に満たないときに、複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値が、第2の閾値よりも大きい第1の閾値を超える場合に、他の1つの受信アンテナの増幅回路2400またはRSSI回路2402の故障(受信電界強度測定値が実際よりも大きくなる故障)を検出する。
【0084】
さらに、故障検出手段は、少なくとも2つの受信アンテナの受信電界強度測定値が第2の閾値に満たないときに、他の1つの受信電界強度測定値が第1の閾値を超えた場合に、カウント値をインクリメントする第1の故障カウンタを有し、第1の故障カウンタが第3の閾値に達した時点で、他の1つの受信アンテナの増幅回路2400またはRSSI回路2402の故障(受信電界強度測定値が実際より大きくなる故障)を確定して記憶する。
【0085】
また、複数の受信アンテナ26a〜26cの各コイル26a0〜26c0(図4〜図6)は、互いに直交する方向となるように、単一のコイルボビン260に巻回されている。
さらに、複数の受信アンテナ26a〜26cのうちの1つの受信アンテナ26cは、携帯機2の電池が切れた場合に車載機1と携帯機2との間で通信するためのトランスポンダ通信用の送受信アンテナの機能を兼ねている。
【0086】
故障検出手段は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値Ra〜Rcを複数回にわたって繰り返し取得する。
さらに、故障検出手段は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値Ra〜Rcのいずれかが故障の兆候を示す場合に、携帯機の移動をともなう可能性が高いタイミングとして、車両100のドア開閉時のタイミングで受信電界強度測定値Ra〜Rcを複数回にわたって繰り返し取得する。これにより、RSSI値(電界強度)を測定する機会を増やして故障診断精度を高め、故障検出の遅れや誤検出の可能性を減らすことができる。
【0087】
車載機1から携帯機2に送信される電界強度測定用信号および認証要求信号は、LF帯波を用いていることから、磁束の性質を有する。
また、携帯機2の受信アンテナ26a〜26cとしてはコイルアンテナが使用されるので、携帯機2の受信感度は、強い指向性を有し、磁束がコイル26a0〜26c0に直行する向きで最大となり、磁束がコイル26a0〜26c0に並行になると最小となる。
【0088】
スマートキーレスエントリシステムにおいては、車載機1側のLF送信アンテナ31aに対する携帯機2の向きおよび位置により、携帯機2における磁束の向きも変化することから、一方向の受信アンテナのみでは磁束を捉えられない状況が発生するので、複数の方向の受信アンテナ26a〜26cを設置することにより、受信不能に陥らないように工夫されている。
【0089】
携帯機2において、複数の受信アンテナ26a〜26c(コイルアンテナ)は、互いに相互インダクタンスなどの結合を有し、1つのアンテナが十分な強度の磁束を受信している条件下においては、他のアンテナも幾らかの電界強度を検出している。
よって、幾つかの受信アンテナが非常に強い電界強度を検出している条件下では、他の受信アンテナも相互インダクタンスなどの電磁結合によって閾値Th2以上の電界強度を検知するはずであり、電界強度が閾値Th2未満の状態が継続(C1≧Th3)する場合には、いずれかの受信系統の故障(断線故障)と判定することができる。
【0090】
この発明の実施の形態1によれば、スマートキーレスシステムに適用される無線通信システムにおいて、たとえユーザにとって違和感があっても、ユーザによる故障判定が困難な携帯機2の故障(携帯機2の一部の受信アンテナの故障)を、多大なコストを要することなく検出することができる。
【0091】
これにより、ユーザが故障と知らずに無線通信システムを使用し続けた際に、故障した受信アンテナの電界強度が異常なことに起因して、スマートキーレスシステムが携帯機2の位置を正しく把握できずに生じる異常動作に悩まされなくて済み、ユーザクレームを減少させることができる。
【0092】
特に、故障アンテナがトランスポンダ通信兼用のLF受信アンテナ26cであって、携帯機2の電池切れ時用のバックアップ機能と兼用されている場合、電池切れでバックアップ機能を使うまで故障に気付かないという不具合を防止することができる。
【0093】
さらに具体的には、故障判定手順(図7)が実行されるためには、ユーザ200が車両100のスイッチ類を操作しかつ携帯機2が高い磁界内に入っている必要があり、故障判定の機会が限られることから、故障が確定するまでに時間が掛かる。
たとえば、ユーザ200がスイッチ類を操作する機会は1日のうちに数回程度であり、故障カウンタC1が閾値Th3に達するまでに数日を要してしまうことになる。
【0094】
そこで、故障検出機会を増やすための対策として、故障カウンタC1のカウント値が所定回数に達した場合、いずれかの受信アンテナが高い磁束を受け始めると、車載機1は、故障判定用のRSSI値測定用信号の携帯機2への送信を繰返し実行することにより、故障の確定を早めるようにする。
【0095】
たとえば、故障カウンタC1のカウント値が所定回数を越えた場合、故障判定の機会を増やすために、車載機1は、LF送信アンテナ31a〜31cの出力レベルを変動させながら、繰返し故障検出用の送信アンテナ駆動を繰返す動作を行うことにより、携帯機2における故障判定の確定を早めることができる。
このとき、途中で故障カウンタC1が0クリアされた場合には、故障判定用のRSSI値測定用信号の繰返し送信動作を中止する機能を持たせる。
【0096】
また、上記説明では具体的に言及しなかったが、無線通信システムに診断モードを設けるとともに、診断モードに強制的に切替えるための外部操作手段(スイッチ類)の操作により、特別な専用装置を用いることなく、携帯機2の診断モードに移行可能な構成としてもよい。
【0097】
これにより、車両100のディーラやユーザ200が携帯機2の故障検出を行いたい場合に、特別な専用装置を使わずに、たとえばリクエストスイッチ33a、33b(および携帯機2の入力回路21の操作信号との組み合わせ)を所定手順で操作することにより、故障検出手段を有効化して、故障検出動作を繰返す診断モードに移行することができる。
【0098】
すなわち、スマートキーレスシステムの無線通信システムにおいて、たとえば、リクエストスイッチ31a、31bを複数回連続操作するなど所定の操作手順により、RSSI回路2402による電界強度測定を繰返す診断モード(図7、図8)に入るので、ディーラやユーザが携帯機2の故障点検および故障検出を容易に行うことができる。
【0099】
具体例としては、車載機1に入力されるリクエストスイッチ33a、33bの操作信号、または、制御装置4を介して車載機1に入力されるドア開閉信号、または、携帯機2の入力回路21を介して入力される施錠スイッチ信号または開錠スイッチ信号を、上記スイッチ操作信号と関連したモード切替え有効化信号として、車載機1に送信してもよい。
【0100】
車載機1は、携帯機2から送信される気中信号をRF受信アンテナ32で受信するが、このとき、RF受信回路13で復調して得られる携帯機2の施錠または開錠スイッチ信号(携帯機2の操作信号)をユーザ200が所定手順で操作することにより、モード切替えを有効化して、車載機1からのLF送信信号に基づく携帯機2のLF受信アンテナ26a〜26cの故障診断モードに移行することができる。
または、ディーラで行われる故障診断モードの一部として、携帯機2のLF受信アンテナ26a〜26cの故障診断モードに移行することができる。
【0101】
携帯機2のLF受信アンテナ26a〜26cの故障診断モードにおいて、車載機1は、故障判定用のRSSI値測定用信号の送信動作を繰返し実行し続けることになる。
さらに、携帯機2のLF受信アンテナ26a〜26cの故障診断モードにおいて、ユーザ200は、故障判定対象となる携帯機2を車載機1のLF送信アンテナ31aに近づけたり離したり、また、携帯機2の向きを回したりすることにより、故障判定処理手順を効率的に繰返し実行することができる。
【0102】
故障判定処理(図7、図8)による診断結果は、車載の制御装置4の表示器または報知器を介して、故障コード表示やランプ点灯またはブザー吹鳴などにより、作業者に知らせることができる。
【0103】
実施の形態2.
なお、上記実施の形態1(図7、図8)では、強磁界の環境下(Ra>Th1、または、Rb>Th1)で検出されるRSSI値(Rc)が閾値Th2(<Th1)に満たない場合に故障カウンタC1をインクリメントしたが、図9および図10に示すように、携帯機2の姿勢が大変動している環境下(dRa>Th4、または、dRb>Th4)で、RSSI値変動量dRc(=|今回値−前回値|)が閾値Th5(<Th4)に満たない場合に故障カウンタC2をインクリメントしてもよい。
【0104】
以下、図9および図10を参照しながら、この発明の実施の形態2による故障検出動作について、前述と同様に、代表的にアンテナ26cの断線故障を検出する場合を例にとって説明する。
【0105】
図9はこの発明の実施の形態2による受信アンテナ26cの故障検出処理を示すフローチャートであり、図10はこの発明の実施の形態2による受信アンテナ26cの故障検出処理を示すタイミングチャートである。
なお、この発明の実施の形態2に係る無線通信システムの構成は、前述(図1〜図6)と同様であり、携帯機2(図3)内のCPU20の動作プログラムが異なるのみである。
【0106】
この場合、磁束の中で携帯機2の位置や向きが大きく動いた場合、携帯機2のすべてのアンテナ26a〜26cのRSSI値Ra〜Rcが変動することを利用して故障検出を行う。
すなわち、図6のように、携帯機2のアンテナ26a〜26cは、ほぼ直行して配置されているので、少なくとも1つのアンテナのRSSI値が大きく変動すると、携帯機2の位置か向きが大きく変化したと推測できる。
【0107】
よって、携帯機2の姿勢変動状態(RSSI値の変動状態)でRSSI値が変化しない状態が長時間にわたって継続することは考えにくいので、RSSI値が変化しないアンテナコイルが断線故障しているか、または増幅回路やRSSI回路が故障していると判定することができる。
逆に、携帯機2の姿勢安定状態(RSSI値の無変動状態)でRSSI値の大きな変化を検出しているアンテナコイルの増幅回路やRSSI回路が故障(受信電界強度測定値が実際よりも大きくなる故障など)していると判定することもできる。
【0108】
図9においては、前述(図7)と同様に断線故障検出プログラムの一例を示している。
図9において、ステップS206〜S209は、前述(図7参照)のステップS104〜S107の処理に対応している。
【0109】
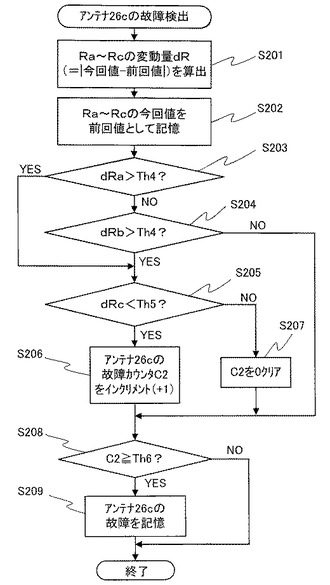
携帯機2(図3)内のCPU20は、まず、アンテナ26a〜26cのRSSI値Ra〜Rcの今回値から前回値を減算して各アンテナのRSSI値変動量dR(=|今回値−前回値|)を算出する(ステップS201)。
【0110】
続いて、次回の故障検出処理に備えて、各RSSI値Ra〜Rcの今回値を前回値として記憶する(ステップS202)。
以下、ステップS203、S204により、アンテナ26a、26bのRSSI値変動量dRa、dRbのいずれかが、閾値Th4(携帯機2の位置または向きの変化が十分大きいと見なされる大変動判定用の基準値)よりも大きいか否かを判定し、いずれかが閾値Th4を越えた場合は、アンテナ26cのRSSI値変動量dRcの判定処理(ステップS205)を行う。
【0111】
まず、アンテナ26aのRSSI値変動量dRaが閾値Th4よりも大きいか否かを判定し(ステップS203)、dRa>Th4(すなわち、YES)と判定されれば、アンテナ26cのRSSI値変動量dRcの判定処理(ステップS205)に移行する。
【0112】
一方、ステップS203において、dRa≦Th4(すなわち、NO)と判定されれば、続いて、アンテナ26bのRSSI値変動量dRbが閾値Th4よりも大きいか否かを判定し(ステップS204)、dRb≦Th4(すなわち、NO)と判定されれば、アンテナ26cの故障カウンタC2の判定処理(ステップS208)に移行する。
【0113】
一方、ステップS204において、dRb>Th4(すなわち、YES)と判定されれば、続いて、アンテナ26cのRSSI値変動量dRcが閾値Th5(RSSI値の大変動時に測定されるべき最小限の値<Th4)よりも小さいか否かを判定する(ステップS205)。
【0114】
ステップS205において、dRc<Th5(すなわち、YES)と判定されれば、アンテナ26cを含む回路系に断線故障の可能性があるので、アンテナ26cの故障カウンタC2をインクリメント(+1)して(ステップS206)、ステップS208に移行する。
【0115】
一方、ステップS205において、dRc≧Th5(すなわち、NO)と判定されれば、アンテナ26cを含む回路系が正常と見なされるので、アンテナ26cの故障カウンタC2を0クリアして(ステップS207)、ステップS208に移行する。
【0116】
ステップS208においては、アンテナ26cの故障カウンタC2のカウント数(故障判定回数)が閾値Th6(実際に故障していなければ達し得ない回数)以上に達したか否かを判定し、C2<Th6(すなわち、NO)と判定されれば、実際の故障発生とは確定されないので、図9の処理ルーチンを終了する。
【0117】
一方、ステップS208において、C2≧Th6(すなわち、YES)と判定されれば、実際の故障発生状態と見なし、アンテナ26cの故障を記憶して(ステップS209)、図9の処理ルーチンを終了する。
なお、図9において、故障確定用の閾値Th6は、前述(図7、図8)の閾値Th3と同一値であってもよい。
【0118】
また、前述(図7)と同様に、図9の故障検出プログラムは、RSSI値が入力されるごとに1回のみ実行される。
さらに、図9の故障判定処理や故障の記憶処理(ステップS209)は、携帯機2内のCPU20による実行に限定されることはなく、車載機1内のCPU10で実行してもよい。
【0119】
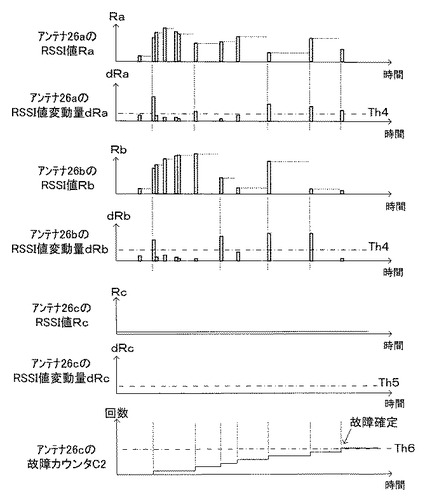
図10は故障検出処理(図9)の具体的な動作例を示している。
図10においては、アンテナ26a、26bのRSSI値Ra、Rbが十分に変動している状況下(dRa>Th4、dRb>Th4)で、アンテナ26cに断線故障が発生し、アンテナ26cのRSSI値変動量dRcが閾値Th5に満たない状態を示している。
【0120】
図10において、故障していないアンテナ26a、26bのRSSI値変動量dRa、dRbは、閾値Th4を超えている。
一方、断線故障したアンテナ26cのRSSI値変動量dRcは0レベルであり、閾値Th5に達することはない。
【0121】
よって、アンテナ26cの故障カウンタC2は、アンテナ26a、26bのいずれかのRSSI値変動量dRa、dRbが閾値Th4を超えるごとに、dRc<Th5の判定結果に応答してインクリメントし続け、C2≧Th6に達した時点で故障が確定される。
【0122】
なお、ここでは代表的に、3つのアンテナ26a〜26cのうち最も重要な、トランスポンダ兼用のアンテナ26cの故障判定処理を例にとって説明したが、他のアンテナ26a、26bの故障判定処理も同様に行うことができる。
【0123】
以上のように、この発明の実施の形態2(図1〜図6、図9、図10)に係る無線通信システムの故障検出手段は、複数の受信アンテナ26a〜26cのうちの少なくとも1つの受信アンテナの受信電界強度測定値の変動量(たとえば、dRaまたはdRb)が閾値Th4(第4の閾値)を超えたときに、複数の受信アンテナ26a〜26cのうちの他の1つの受信アンテナの受信電界強度測定値の変動量(たとえば、dRc)が、閾値Th4よりも小さい閾値Th5(第5の閾値)に満たない場合に、他の1つの受信アンテナ(たとえば、26c)の故障(断線故障)を検出する。
【0124】
さらに、この発明の実施の形態2による故障検出手段(図9、図10)は、少なくとも1つの受信アンテナの受信電界強度測定値の変動量が第閾値Th4を超えたときに、他の1つの受信電界強度測定値の変動量が閾値Th5に満たない場合に、カウント値をインクリメントする故障カウンタC2(第2の故障カウンタ)を有し、故障カウンタC2が閾値Th6(第6の閾値)に達した時点で、他の1つの受信アンテナの故障(断線故障)を確定して記憶する。
【0125】
一方、この発明の実施の形態2による故障検出手段は、複数の受信アンテナ26a〜26cのうちの少なくとも2つの受信アンテナの受信電界強度測定値の変動量が第5の閾値に満たないときに、複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値の変動量が、第5の閾値よりも大きい第4の閾値を超えた場合に、他の1つの受信アンテナの増幅回路またはRSSI回路の故障(受信電界強度測定値が実際よりも大きくなる故障)を検出する。
【0126】
さらに、故障検出手段は、少なくとも2つの受信アンテナの受信電界強度測定値の変動量が第5の閾値に満たないときに、他の1つの受信電界強度測定値の変動量が第4の閾値を超えた場合に、カウント値をインクリメントする第2の故障カウンタを有し、第2の故障カウンタが第6の閾値に達した時点で、他の1つの受信アンテナの増幅回路またはRSSI回路の故障(受信電界強度測定値が実際よりも大きくなる故障)を確定して記憶する。
【0127】
このように、任意の受信アンテナ(コイルアンテナ)のRSSI値(電界強度測定値)が前回値に対して閾値Th4を超える変化を示す場合に、携帯機2に印加される磁束の向きが変わった(携帯機2が移動したか、携帯機2の向きが変わった)ものと判定し、他に電界強度の変化が見られない(変動量が閾値Th5未満の)受信アンテナが存在した場合に、この条件下の状態が所定回数(閾値Th6)以上にわたって継続した時点で、変動量が閾値Th5未満の受信アンテナの受信系に異常が有ると判定する機能を有する。
【0128】
この場合も、前述の実施の形態1と同様に、スイッチ類の操作に応じた診断モードへの強制的切替えや故障報知など、種々の変形例を適用することが可能であり、前述の実施の形態1と同様の作用効果を奏する。
【0129】
実施の形態3.
なお、上記実施の形態2(図9、図10)では、RSSI値変動時の環境下で検出されるRSSI値変動量dRが閾値Th5に満たない場合に故障カウンタC2をインクリメントしたが、図11および図12に示すように、RSSI値変動時の環境下(dRa>Th7、または、dRb>Th7)において、2つのアンテナのRSSI値変動量の差分ΔdRac(=|dRc−dRa|)が閾値Th8に満たない場合に差分故障カウンタC3をインクリメントしてもよい。
【0130】
以下、図11および図12を参照しながら、この発明の実施の形態3による故障検出動作について、前述と同様に、代表的にアンテナ26cの断線故障を検出する場合を例にとって説明する。
【0131】
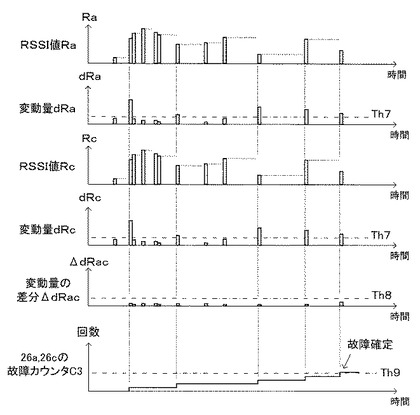
図11はこの発明の実施の形態3による受信アンテナ26cの故障検出処理を示すフローチャートであり、図12はこの発明の実施の形態3による受信アンテナ26cの故障検出処理を示すタイミングチャートである。
なお、この発明の実施の形態3に係る無線通信システムの構成は、前述(図1〜図6)と同様であり、携帯機2(図3)内のCPU20の動作プログラムが異なるのみである。
【0132】
この発明の実施の形態3においては、磁束中で携帯機2の位置や向きが大きく変動している場合に、携帯機2のアンテナ26a〜26cのRSSI値変動量dRa〜dRcが、相互間にほとんど差分が生じない状態を続けることは有り得ない、という事実を利用している。
【0133】
以下、この発明の実施の形態3による故障検出原理について説明する。
前述(図4〜図6)の通り、携帯機2のアンテナ26a〜26cは、ほぼ直行して配置されているので、複数のアンテナの各RSSI値変動量が同一値であり続けるように携帯機2の位置または向きを変化させ続けることは困難である。
【0134】
よって、いずれかのアンテナのRSSI値が所定値以上変化している(携帯機2の位置または向きが変化している)際に、複数のアンテナのRSSI値変動量が同一値のままの状態が長時間続くことは考え難いので、たとえばRSSI値変動量が同一値を示すアンテナコイルは互いに接触故障している可能性がある。または、逆に、RSSI値変動量が大きいアンテナコイルの増幅回路やRSSI回路にも故障があるものと判定することができる。
【0135】
図11においては、アンテナ26aとアンテナ26cとの間でショート故障が発生した場合の、アンテナ26a、26cの故障検出プログラムの一例を示している。
図11において、ステップS301〜S303は、前述(図9参照)のステップS201〜S203の処理に対応している。
【0136】
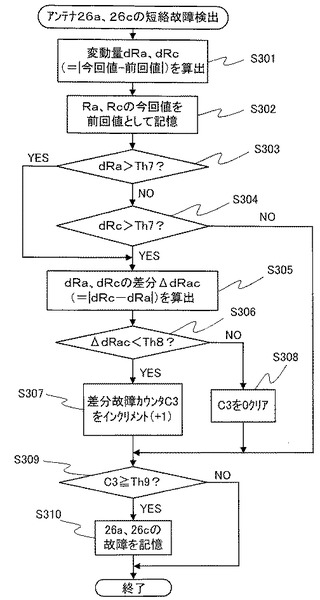
携帯機2(図3)内のCPU20は、まず、アンテナ26a、26cのRSSI値の今回値から前回値を減算して各アンテナのRSSI値変動量dRa、dRcを算出する(ステップS301)。
続いて、次回の処理に備えて、アンテナ26a、26cの今回のRSSI値Ra、Rcを前回値として記憶する(ステップS302)。
【0137】
以下、ステップS303、S304により、アンテナ26a、26cのRSSI値変動量dRa、dRcのいずれかが閾値Th7(携帯機2の位置または向きの変化が十分大きいと見なされる大変動判定用の基準値)よりも大きいか否かを判定し、いずれかが閾値Th7を越えた場合は、差分算出処理(ステップS305)に移行し、いずれも閾値Th7を超えていない場合には、差分故障カウンタC3の判定処理(ステップS309)に移行する。
【0138】
まず、アンテナ26aのRSSI値変動量dRaが閾値Th7よりも大きいか否かを判定し(ステップS303)、dRa>Th7(すなわち、YES)と判定されれば、後述の差分算出処理(ステップS305)に移行する。
なお、図11において、大変動判定用の基準値となる閾値Th7は、前述(図9、図10)の閾値Th4と同一値であってもよい。
【0139】
一方、ステップS303において、dRa≦Th7(すなわち、NO)と判定されれば、続いて、アンテナ26cのRSSI値変動量dRcが閾値Th7よりも大きいか否かを判定し(ステップS304)、dRc≦Th7(すなわち、NO)と判定されれば、差分故障カウンタC3の判定処理(ステップS309)に移行する。
【0140】
一方、ステップS304において、dRc>Th7(すなわち、YES)と判定されれば、RSSI値変動量が十分に大きい状態にあるものと見なし、アンテナ26a、26cのRSSI値変動量dRa、dRcの差分ΔdRac(=|dRc−dRa|)を算出する(ステップS305)。
【0141】
続いて、アンテナ26a、26cのRSSI値変動量の差分ΔdRacが閾値Th8(アンテナ26a、26cが短絡したものと見なせる微小差分)よりも小さいか否かを判定する(ステップS306)。
【0142】
ステップS306において、ΔdRac<Th8(すなわち、YES)と判定されれば、アンテナ26a、26cの差分故障カウンタC3をインクリメント(+1)して(ステップS307)、ステップS309に移行する。
一方、ステップS306において、ΔdRac≧Th8(すなわち、NO)と判定されれば、差分故障カウンタC3を0クリアして(ステップS308)、ステップS309に移行する。
【0143】
ステップS309においては、差分故障カウンタC3のカウント数が閾値Th9(実際に短絡故障していなければ達し得ない回数)以上に達したか否かを判定し、C3<Th9(すなわち、NO)と判定されれば、実際の短絡故障発生とは確定されないので、図11の処理ルーチンを終了する。
なお、故障確定用の閾値Th9は、前述(図9、図10)の閾値Th6と同一値であってもよい。
【0144】
一方、ステップS309において、C3≧Th9(すなわち、YES)と判定されれば、実際の短絡故障発生状態と見なし、アンテナ26a、26cの故障を記憶して(ステップS310)、図11の処理ルーチンを終了する。
【0145】
なお、前述(図9)と同様に、図11の短絡故障検出プログラムは、RSSI値が入力されるごとに1回のみ実行される。
また、図11の短絡故障判定処理や故障の記憶処理(ステップS310)は、携帯機2内のCPU20による実行に限定されることはなく、車載機1内のCPU10で実行されてもよい。
【0146】
図12は短絡故障検出処理(図11)の具体的な動作例を示している。
図12においては、アンテナ26a、26cのRSSI値Ra、Rcが十分に変動している状況下(dRa>Th7、dRc>Th7)で、アンテナ26a、26cの相互間で短絡故障が発生し、アンテナ26a、26cのRSSI値変動量の差分ΔdRacが閾値Th8に満たない状態を示している。
【0147】
図12において、短絡故障しているアンテナ26a、26cのRSSI値変動量dRa、dRcは、閾値Th7を超えている。
また、RSSI値変動量dRa、dRcの差分ΔdRac(=|dRc−dRa|)は、閾値Th8に達していない。
【0148】
よって、差分故障カウンタC3は、アンテナ26a、26cのRSSI値変動量dRa、dRcが閾値Th7を超えるごとに、ΔdRac<Th8の判定結果に応答してインクリメントし続け、C3≧Th9に達した時点で故障が確定される。
なお、ここでは代表的に、2つのアンテナ26a、26cの短絡故障判定処理を例にとって説明したが、他の2つのアンテナの組合せ、すなわち、アンテナ26a、26b、アンテナ26b、26cについても、同様に短絡故障判定処理を行うことができる。
【0149】
以上のように、この発明の実施の形態3(図1〜図6、図11、図12)に係る無線通信システムの故障検出手段は、複数の受信アンテナ26a〜26cのうちの2つの受信アンテナの受信電界強度測定値の変動量(たとえば、dRaまたはdRc)の少なくとも一方が閾値Th7(第7の閾値)を超えたときに、2つの受信アンテナの受信電界強度測定値の各変動量の差分(ΔdRac=dRc−dRa)が、閾値Th7よりも小さい閾値Th8(第8の閾値)に満たない場合に、2つの受信アンテナ(たとえば、26a、26c)の故障(短絡故障)を検出する。
【0150】
さらに、この発明の実施の形態3による故障検出手段(図11、図12)は、2つの受信アンテナの受信電界強度測定値の変動量(たとえば、dRaまたはdRc)の少なくとも一方が閾値Th7を超えたときに、2つの受信アンテナの受信電界強度測定値の各変動量の差分(たとえば、ΔdRac)が、閾値Th8に満たない場合に、カウント値をインクリメントする差分故障カウンタC3(第3の故障カウンタ)を有し、差分故障カウンタC3が閾値Th9(第9の閾値)に達した時点で、2つの受信アンテナ(たとえば、26a、26c)の故障(短絡故障)を確定して記憶する。
【0151】
このように、複数の受信アンテナ26a〜26cの電界強度が一定値以上変動している状態において、2つの受信アンテナの電界強度の各変動量の間に差分が見られない(差分が閾値Th8未満の)状態が長時間継続する場合に、2つの受信アンテナの受信系の異常と判定する機能を有する。
【0152】
この場合も、前述の実施の形態1、2と同様に、スイッチ類の操作に応じた診断モードへの強制的切替えや故障報知など、種々の変形例を適用することが可能であり、前述の実施の形態1、2と同様の作用効果を奏する。
【符号の説明】
【0153】
1 車載機、2 携帯機、4 制御装置、10 CPU、11 メモリ、12 LF送信回路、13 RF受信回路、17 スイッチ入力回路、18 トランスポンダ通信用回路、20 CPU、21 入力回路、22 メモリ、23 RF送信回路、24 LF通信回路、25 RF送信アンテナ、26a〜26c アンテナ(LF受信アンテナ)、26a0〜26c0 コイル、31a〜31c LF送信アンテナ、32 RF受信アンテナ、33a、33b リクエストスイッチ、34 スタートスイッチ、35 トランスポンダ通信用アンテナ、100 車両、110 認証コード、121 変調回路、122 増幅回路、131 RF復調回路、132 増幅回路、200 ユーザ、220 認証コード、240 LF受信回路、241 トランスポンダ機能選択回路、242 トランスポンダ機能回路、243 メモリ、260 コイルボビン、2400 増幅回路、2401 LF復調回路、2402 RSSI回路、2430 認証コード、C1、C2 故障カウンタ、C3 差分故障カウンタ、dRa、dRb、dRc RSSI値変動量、Ra、Rb、Rc RSSI値、Th1〜Th9 閾値、ΔdRac RSSI値変動量の差分。
【技術分野】
【0001】
この発明は、車両に搭載された車載無線通信装置(以下、「車載機」という)と、ユーザによって携帯される携帯無線通信装置(以下、「携帯機」という)とを備えた無線通信システムに関し、特に、故障による通信性能の低下を防止できるスマートキーレスエントリシステムを実現するための技術に関するものである。
【背景技術】
【0002】
従来から、車両のドアの施錠や解錠を、ユーザの携帯機からの遠隔操作によって行うキーレスエントリシステムが知られている。
また、携帯機を操作することなく、ドアの施錠や解錠を行うスマートキーレスエントリシステムも良く知られている(たとえば、特許文献1参照)。
【0003】
特許文献1においては、車載機および携帯機を有するキーレスエントリシステムにおいて、携帯機に内蔵されたRSSI(Received Signal Strength Indicator:受信信号強度測定器)機能を使用して、携帯機と車載機との距離を測定し、あらかじめ定められた距離閾値を超えるか否かに応じて、ドアの施解錠の許可または禁止や、イグニション操作の許可または禁止を判定している。
【0004】
ところで、上記従来システムにおいては、車載機と携帯機との間でLF(Low Frequency)通信を行う際に、携帯機が故障検出(診断)機能を備えていないので、携帯機を落下した際の衝撃による故障や出荷後の経年劣化による故障が発生した場合に、車両のユーザは、スマートキーレスエントリシステムの動作異常によって気付く場合を除いて、故障発生を認識することができない。すなわち、携帯機が全く機能しなければ、ユーザは直ちに異常に気付くことができる。
【0005】
しかし、携帯機のLF受信回路は、携帯機の向きの違いによる受信感度低下を回避するために、通常は、互いにアンテナコイルの向きを90度ずらした3系統の受信アンテナと、各受信アンテナに対応した受信回路とを備えているので、すべての受信アンテナ系統が同時に故障せずに部分的に故障する場合が考えられる。
【0006】
このように、携帯機の受信機能が部分的に故障した場合には、スマートキーレスエントリシステムとして、特定の携帯機の向きで受信感度が低下するものの完全に通信不能には至らず、それなりに動作し続けるので、ユーザはシステムの故障に気付きにくい。
【0007】
また、スマートキーレスエントリシステムにおいては、3系統の受信アンテナの受信電界強度(RSSI値)を測定し、3系統のアンテナの受信電界強度のベクトル和に基づき送信アンテナからの距離を求めることにより、車両に対する携帯機の位置を推定してスマートキーレスエントリシステムの動作に反映させている。
【0008】
たとえば、携帯機が車内に位置すると推定された場合には、施錠要求に対して携帯機の車内閉じ込め警告を発するなどの警報動作判定に利用している。
また、携帯機が車外に位置すると推定された場合には、車両の駆動動力源(エンジンやモータ)の始動操作を受け付けない、などの制御判定に利用している。
【0009】
したがって、携帯機の受信機能に部分的な故障が発生した場合でも、正しく携帯機の位置が検出することができず、スマートキーレスエントリシステムとしては、誤った判定結果に基づいて誤動作する可能性がある。
【0010】
このような誤判定が発生する条件としては、車両における携帯機の位置、携帯機の故障により生じる携帯機の位置推定のズレ量、携帯機の向きによる受信信号を故障受信系統アンテナが受ける割合などがあげられ、異常動作の再現が難しい場合も多い。
【0011】
したがって、ユーザは、スマートキーレスエントリシステムの動作時に違和感を覚えても、故障と判断することができずに放置する状況が起こり、たまたま悪条件が揃った際に、無視できない程度のスマートキーレスエントリシステムの誤判定(携帯機の閉じ込めなど)が発生し、不満を覚えることが想定される。
【0012】
さらに、受信用の3系統のうちの1系統は、携帯機の電池が切れた場合の応急用のトランスポンダ(transponder)送受信用と兼用している場合が多く、この兼用系統が故障した場合に気付かないで放置していると、携帯機の電池切れの際に応急措置がとれず、ユーザが車両を動かすことが困難になってしまう。
【0013】
また、上記のように、携帯機の受信機能に関する簡便な故障検出手段を備えていない従来システムにおいては、ユーザがスマートキーレスエントリシステム動作に違和感を覚えて点検を依頼した際に、携帯機の故障を短時間に的確に見つけることは難しく、故障に対処できないことも想定される。
【先行技術文献】
【特許文献】
【0014】
【特許文献1】特開2006−319845号公報
【発明の概要】
【発明が解決しようとする課題】
【0015】
従来の無線通信システムは、複数の受信系統を有する携帯機の機能を診断する故障検出手段を備えていないので、複数系統のうちの一部機能が故障しても故障発生状態を検知することができず、種々の不具合が生じるという課題があった。
【0016】
また、仮に受信アンテナに故障検出用の回路を設けると、携帯機のLF受信回路が複雑になりコストアップを招くうえ、故障検出中にLF受信が不可能になるという課題があった。
さらに、故障発生に備えて、仮に携帯機の電池切れ時の対処用に独立したLF通信系を準備すると、携帯機のコストアップおよび大型化を招くうえ、外観設計の自由度を損なうという課題があった。
【0017】
この発明は、上記のような課題を解決するためになされたものであり、特に構造を複雑化せずに、携帯機のコイルアンテナ特性に着目して、LF受信回路およびCPUに故障検出機能を設けることにより、コストアップを招くことなく、ユーザが判断しにくいスマートキーレスエントリシステムの携帯機故障を容易に検知可能な無線通信システムを得ることを目的とする。
【課題を解決するための手段】
【0018】
この発明に係る無線通信システムは、車両に搭載された無線通信機能を有する車載機と、車両のユーザによって携帯され、車載機との間で無線通信機能を有する携帯機とにより構成される無線通信システムであって、車載機は、車載機CPUと、認証コードを記憶する車載機メモリと、電界強度測定用信号および認証要求信号を携帯機に送信するLF送信回路と、携帯機からの認証応答信号を受信する受信回路と、を備え、車載機CPUは、携帯機から受信した認証応答信号に含まれる認証コードと、車載機メモリ内の認証コードとの照合を行い、携帯機は、携帯機CPUと、認証コードを記憶する携帯機メモリと、電界強度測定用信号および認証要求信号を受信する複数の受信アンテナおよびLF受信回路と、携帯機メモリ内の認証コードおよび認証応答信号を車載機に送信する送信回路と、複数の受信アンテナごとに電界強度測定用信号の受信電界強度を測定する電界強度測定部と、を備え、携帯機の複数の受信アンテナは、互いに磁束検出方向の異なるコイルアンテナからなり、携帯機CPUは、複数の受信アンテナごとの各受信電界強度測定値の相互比較結果に基づいて、複数の受信アンテナのいずれかの故障状態を検出する故障検出手段を含むものである。
【発明の効果】
【0019】
この発明によれば、スマートキーレスシステムに適用される無線通信システムにおいて、たとえ違和感があってもユーザによる故障判定が困難な、携帯機の一部の受信アンテナの故障を多大なコストを要することなく検出することができる。
【図面の簡単な説明】
【0020】
【図1】この発明の実施の形態1に係る無線通信システム(スマ−トキーレスエントリシステム)を概略的に示す平面構成図である。
【図2】図1内の車載機の回路構成を示すブロック図である。
【図3】図1内の携帯機の回路構成を示すブロック図である。
【図4】図3内の受信アンテナのコイル構造の第1段階を示す斜視図である。
【図5】図3内の受信アンテナのコイル構造の第2段階を示す斜視図である。
【図6】図3内の受信アンテナのコイル構造の第3段階を示す斜視図である。
【図7】この発明の実施の形態1による受信アンテナの故障検出処理を示すフローチャートである。
【図8】この発明の実施の形態1による受信アンテナの故障検出処理を示すタイミングチャートである。
【図9】この発明の実施の形態2による受信アンテナの故障検出処理を示すフローチャートである。
【図10】この発明の実施の形態2による受信アンテナの故障検出処理を示すタイミングチャートである。
【図11】この発明の実施の形態3による受信アンテナの故障検出処理を示すフローチャートである。
【図12】この発明の実施の形態3による受信アンテナの故障検出処理を示すタイミングチャートである。
【発明を実施するための形態】
【0021】
実施の形態1.
以下、図1〜図3を参照しながら、この発明の実施の形態1に係る無線通信システムについて、スマートキーレスエントリシステムの場合を例にとって詳細に説明する。
図1はこの発明の実施の形態1に係るスマートキーレスエントリシステムを概略的に示す平面構成図である。
【0022】
図1において、スマートキーレスエントリシステムは、概して、車両100に搭載された車載機1と、車両100のユーザ200が携帯する携帯機2とにより構成される。
車両100には、車載機1と協働する他の回路要素として、制御装置4と、LF送信アンテナ31a〜31cと、RF受信アンテナ32と、リクエストスイッチ33a、33bと、スタートスイッチ34と、イモビライザ(Immobiliser)機能を実現するためのトランスポンダ通信用アンテナ35と、が設けられている。
【0023】
車載機1は、RF受信アンテナ32を介して、携帯機2からの遠隔操作信号を受信した際に、制御装置4を介してドアの解錠操作または施錠操作などを行う。
また、車載機1は、ユーザ200によるドアの開閉動作やリクエストスイッチ33a、33bまたはスタートスイッチ34の操作に応答して、LF送信アンテナ31a〜31cから携帯機2に対してLF信号の近距離送信を行い、携帯機2の位置検知などを行う。
【0024】
LF送信アンテナ31a〜31cは、車両100の車室内および左右ドア部に設置されており、リクエストスイッチ33a、33bは、ユーザ200が操作しやすいように車両100の左右ドア部に設置されている。
【0025】
LF送信アンテナ31a〜31cは、携帯機2に対して無線送信を行い、RF受信アンテナ32は、携帯機2からの無線送信を受信する。
リクエストスイッチ33a、33bは、ユーザ200の施錠および開錠の意思を受け付け、スタートスイッチ34は、ユーザ200の操作によるエンジン始動や走行スタンバイ状態への移行要求を受け付ける。
【0026】
トランスポンダ通信用アンテナ35は、携帯機2が電池切れの場合に、携帯機2との間で、イモビライザ機能を実現するためのトランスポンダ通信(携帯機2への電力供給を兼ねる)を行う。
制御装置4は、車両100のイグニションスイッチ(図示せず)に関する制御を行うとともに、車両100のドアの施錠および解錠を制御する。
【0027】
図1に示したスマートキーレスエントリシステムにおいて、車載機1は、携帯機2から送られてくる信号を受信し、受信信号の内容に応じて、イグニッション操作の許可または禁止を判定し、制御装置4に対してイグニション操作の許可または禁止を指示する。
【0028】
また、車載機1は、携帯機2からの受信信号の内容に応じて、ドアの施錠または解錠を判定し、制御装置4に対してドアの施錠または解錠を指示する。
さらに、車載機1は、携帯機2からの受信信号の内容に応じて、携帯機2が車載機1との操作許可圏内に位置するか否かを判定し、制御装置4に対して、警報用ブザー(図示せず)の駆動許可または駆動禁止や、警告用ランプ(図示せず)の点灯または消灯を指示する。
【0029】
なお、以下の説明において、車載機1から携帯機2への通信は、LF通信方式(Low Frequency Communication Method)を使用し、変調処理後の信号を使用するものとする。
【0030】
また、携帯機2から車載機1への通信は、代表的に、最も一般的なRF通信方式(Radio Frequency Communication Method)を使用し、変調処理後の信号を使用するものとする。
さらに、携帯機2の電池が切れの場合に備え、車載機1と携帯機2との間で双方向LF通信(以下、「トランスポンダ通信」という)を使用するものとする。
【0031】
図2は図1内の車載機1の回路構成を示すブロック図であり、前述(図1参照)と同様のものについては、前述と同一符号を付して詳述を省略する。
図2において、車載機1は、各種演算処理機能を有する車載機CPU10(以下、単に「CPU10」という)と、CPU10に属するROMおよびRAMを含む車載機メモリ11(以下、単に「メモリ11」という)と、LF送信回路12と、RF受信回路13と、スイッチ入力回路17と、トランスポンダ通信用回路18とを備えている。
【0032】
CPU10には、LF送信回路12を介してLF送信アンテナ31a〜31cが接続され、RF受信回路13を介してRF受信アンテナ32が接続され、スイッチ入力回路17を介してリクエストスイッチ33a、33bおよびスタートスイッチ34が接続され、トランスポンダ通信用回路18を介してトランスポンダ通信用アンテナ35が接続されている。
【0033】
メモリ11内には、携帯機2から送信されてくる認証応答信号のデータを認証する(後述する認証コード220の照合を行う)ための認証コード110が記憶されており、メモリ11は、受信データの認証時に認証コード110をCPU10に入力する。
なお、メモリ11内には、トランスポンダ通信時の認証コード(図示せず)も記憶されるが、認証コード110は、トランスポンダ通信時の認証コードにも兼用され得る。
【0034】
CPU10は、車載機1の統合的な制御を行い、あらかじめメモリ11に記憶されたプログラムを実行することにより各種機能を実現する。
【0035】
LF送信回路12は、変調回路121および増幅回路122を備えている。
LF送信回路12内の変調回路121は、CPU10からの送信信号(電界強度測定用信号および認証要求信号)をLF周波数帯の搬送波で変調し、変調後の送信信号を生成する。
また、LF送信回路12内の増幅回路122は、変調回路121により変調された送信信号を増幅してLF送信アンテナ31a〜31cに送る。
【0036】
LF送信アンテナ31a〜31cは、増幅後の送信信号を気中に送信する。
3つのLF送信アンテナ31a〜31cのうち、1つのLF送信アンテナ31aは、車両100の車室内への送信に使用され、他の2つのLF送信アンテナ31b、31cは、車外への送信に使用される。
【0037】
RF受信回路13は、RF復調回路131および増幅回路132を備えている。
RF受信回路13内の増幅回路132は、気中の無線信号を受信するRF受信アンテナ32に接続され、RF受信アンテナ32から入力される受信信号を増幅する。
RF復調回路131は、増幅後の受信信号を復調し、得られた復調信号をCPU10に入力する。
【0038】
トランスポンダ通信用回路18は、CPU10からの送信指令に応答して、携帯機2へのLF送信信号を生成し、トランスポンダ通信用アンテナ35は、LF送信信号を気中に送信する。
また、トランスポンダ通信用回路18は、トランスポンダ通信用アンテナ35を介して受信した気中の無線信号を復調してCPU10に入力する。
【0039】
図3は図1内の携帯機2の回路構成を示すブロック図である。
図3において、携帯機2は、各種演算処理機能を有する携帯機CPU20(以下、単に「CPU20」という)と、ユーザ200の操作信号をCPU20に入力する入力回路21と、CPU20に属するROMおよびRAMを含む携帯機メモリ22(以下、単に「メモリ22」という)と、RF送信回路23と、LF通信回路24と、RF送信アンテナ25と、LF受信アンテナ26a、26b(以下、単に「受信アンテナ26a、26b」または「アンテナ26a、26b」という)と、トランスポンダ通信兼用のLF受信アンテナ26c(以下、単に「受信アンテナ26c」または「アンテナ26c」という)と、を備えている。
【0040】
LF通信回路24内において、トランスポンダ機能選択回路241およびトランスポンダ機能回路242は、通常時には動作せず、携帯機2が電池切れの際のみに車載機1側からの送信電力に応答して動作する。
各アンテナ26a〜26cは、後述の図4〜図6に示すように、互いに磁束検出方向の異なるコイルアンテナからなる。
また、アンテナ26cは、トランスポンダ機能選択回路241およびトランスポンダ機能回路242によるトランスポンダ通信機能が有効化された際には、送受信アンテナとして機能する。
【0041】
CPU20は、携帯機2の統合的な制御を行い、あらかじめメモリ22内に記憶されたプログラムを実行することにより各種機能を実現する。
メモリ22内のROMには、認証コード220があらかじめ記憶されている。認証コード220は、携帯機2から車載機1への送信時に、車載機1において携帯機2を認証する(認証コード110と照合する)ために必要なデータである。
【0042】
RF送信回路23は、CPU20からの送信信号に基づき、RF周波数帯の搬送波を変調した送信信号(認証コード220、認証応答信号および電界強度測定値)を生成し、RF送信アンテナ25は、RF送信回路23からの送信信号を気中に送信する。
【0043】
なお、ここでは図示を省略するが、RF送信回路23は、CPU20からの送信信号をRF周波数帯の搬送波で変調する変調回路と、変調後の送信信号を増幅する増幅回路とを備えている。
【0044】
LF通信回路24は、LF受信回路240と、トランスポンダ機能選択回路241と、トランスポンダ機能回路242と、トランスポンダ機能回路242に属するメモリ243とを備えている。
【0045】
メモリ243内には、認証コード2430が記憶されており、トランスポンダ機能回路242が有効化されたときに、メモリ243内の認証コード2430がトランスポンダ機能回路242に入力される。このとき、認証コード2430は、アンテナ26cを介して車載機1に送信される。
【0046】
なお、図2においては、CPU20に接続されたメモリ22と、トランスポンダ機能回路242に接続されたメモリ243とを、個別に構成した例を示しているが、トランスポンダ機能用のメモリ243を、車載機1への認証応答用のメモリ22を兼用してもよい。
この場合、CPU20は、メモリ243にアクセス可能となり、構成認証コード220は認証コード2430と同一値となるので、メモリ22内の認証コード220は不要となる。
【0047】
LF受信回路240は、増幅回路2400と、LF復調回路2401と、RSSI(Received Signal Strength Indicator)回路2402とを備えている。
増幅回路2400およびRSSI回路2402は、それぞれ、各受信アンテナ26a〜26cに対応して並列構成されているものとする。
【0048】
増幅回路2400は、気中の無線信号を受信するアンテナ26a〜26cからの受信信号を増幅する。
LF復調回路2401は、増幅後の受信信号を復調し、得られた復調信号をCPU20に入力する。
【0049】
RSSI回路2402は、増幅回路2400での増幅度合いに基づき、各アンテナ26a〜26cの受信電界強度(RSSI値Ra〜Rc)を測定し、受信電界強度信号をCPU20に入力する。
【0050】
トランスポンダ機能選択回路241は、アンテナ26cからの気中の無線信号に基づきトランスポンダ通信用の電力供給を検出すると、アンテナ26cの入力経路を、LF受信回路240の選択状態(図3に示した状態)からトランスポンダ機能回路242へと切り替え接続し、LF通信回路24をトランスポンダ機能動作に切替える。
【0051】
トランスポンダ機能回路242は、トランスポンダ機能選択回路241がトランスポンダ機能動作を選択した際に、気中の無線信号を受信するアンテナ26cから入力される受信信号と、認証コード2430とに基づき、車載機1と携帯機2とが相互認証を行うのに必要な暗号演算を行い、演算結果をアンテナ26cから気中へと無線送信する。
相互認証するのに必要なデータである認証コード2430は、メモリ243のROMに記憶されている。
【0052】
入力回路21は、携帯機2のユーザ200による操作入力(ドアやトランクを施錠または解錠する操作入力など)を検出し、操作入力に応じた信号をCPU20に入力する。
【0053】
ここで、この発明の実施の形態1による携帯機2の故障検出原理について説明する。
スマートキーレスエントリシステムの携帯機2において、アンテナ26a〜26cは、互いに指向性による死角を補い合うように、各々のコイルの向きが互いにほぼ90度だけ異なるようにレイアウトされる。
このとき、アンテナ26a、26b、26cは、それぞれが独立部品で構成される場合と、複数のコイルが一体構成される場合がある。
【0054】
一例として、図4〜図6を参照しながら、3つのアンテナ26a〜26cが一体構成された場合のアンテナ構造について説明する。
図4〜図6は図3内のアンテナ26a〜26cのコイル構造を製造時の第1〜第3段階に分けて示す斜視図である。
【0055】
まず、図4のように、直方体(互いの面が90度)のコイルボビン260上の一方向に対し、アンテナ26aのコイル26a0が巻かれる。
次に、図5のように、コイルボビン260上の90度ずらした方向に、アンテナ26bのコイル26b0が巻かれる。
最後に、図6のように、コイルボビン260上のさらに90度ずらした方向に、アンテナ26cのコイル26c0が巻かれる。
【0056】
図6において、互いのアンテナ26a〜26cは、ほぼ90度ずつずれた方向に向いているが、携帯機2内の狭い空間にレイアウトされるので、アンテナ26a〜26cのいずれの相互間にも少なからず相互インダクタンスを持つことになる。
【0057】
たとえば、アンテナコイルが単独構成であって磁束がコイルを貫通しない方向の場合には、コイルに起電力が発生することはないが、図6のコイル構造からなる携帯機2の場合には、コイル26a0〜26c0のいずれかが磁束を受け続けて起電力が発生するうえ、上述の相互インダクタンスを持つので、磁束が通らないコイルにも常に僅かな起電力が発生し続けることになる。
【0058】
よって、強い磁界内に携帯機2を置いた場合には、どのアンテナコイルにも一定以上の起電力が発生するはずなので、起電力を発生しないアンテナコイルのコイルまたは増幅回路2400やRSSI回路2402が断線故障していると判定することができる。
逆に、比較的弱い磁界内に携帯機2を置いた場合には、強い磁界を検出しているアンテナコイルの増幅回路2400やRSSI回路2402が故障(受信電界強度測定値が実際よりも大きくなる故障など)していると判定することもできる。
【0059】
次に、図7および図8を参照しながら、図1〜図6に示したこの発明の実施の形態1による故障検出動作について、さらに具体的に説明する。
この発明の実施の形態1に係る無線通信システムの故障検出手段は、各アンテナ26a〜26cのコイル間の相互インダクタンスによる起電力の発生を利用したものである。
ここでは、具体例として、トランスポンダ通信兼用のアンテナ26cの断線故障を検出する場合を例にとって説明する。
【0060】
図7はこの発明の実施の形態1による受信アンテナ26cの故障検出処理を示すフローチャートであり、CPU20と協働するメモリ22内にあらかじめ記憶された断線故障検出プログラムを示している。
また、図8はこの発明の実施の形態1による受信アンテナ26cの故障検出処理を示すタイミングチャートである。
【0061】
図7において、CPU20は、まず、RSSI回路2402から各アンテナ26a〜26cの受信電界強度(RSSI値Ra〜Rc)を取得して、第1の比較処理により、アンテナ26aのRSSI値Raが閾値Th1(強磁界判定用の基準値)よりも大きいか否かを判定し(ステップS101)、Ra>Th1(すなわち、YES)と判定されれば、第3の比較処理(ステップS103)に移行する。
【0062】
一方、ステップS101において、Ra≦Th1(すなわち、NO)と判定されれば、続いて、第2の比較処理により、アンテナ26bのRSSI値Rbが閾値Th1よりも大きいか否かを判定し(ステップS102)、Rb≦Th1(すなわち、NO)と判定されれば、故障判定処理(ステップS106)に移行する。
【0063】
一方、ステップS102において、Rb>Th1(すなわち、YES)と判定されれば、続いて、第3の比較処理により、アンテナ26cのRSSI値Rcが閾値Th2(強磁界下での最低起電力<Th1)よりも小さいか否かを判定する(ステップS103)。
【0064】
ステップS103において、Rc<Th2(すなわち、YES)と判定されれば、強磁界下の条件下にもかかわらず、アンテナ26cから最低起電力が得られていない状態なので、アンテナ26cの故障カウンタC1をインクリメント(+1)して(ステップS104)、故障判定処理(ステップS106)に移行する。
【0065】
一方、ステップS103において、Rc≧Th2(すなわち、NO)と判定されれば、アンテナ26cの故障カウンタC1を0クリアして(ステップS105)、故障判定処理(ステップS106)に移行する。
【0066】
ステップS106においては、故障カウンタC1の値が閾値Th3(実際の故障時に到達し得る回数)以上であるか否かを判定し、C1<Th3(すなわち、NO)と判定されれば、故障が発生していないものと見なし、図7の処理ルーチンを終了する。
【0067】
一方、ステップS106において、C1≧Th3(すなわち、YES)と判定されれば、アンテナ26cの断線故障と見なし、故障を記憶して(ステップS107)、図7の処理ルーチンを終了する。
【0068】
このように、アンテナ26cを故障判定対象とした場合、他のアンテナ26a、26bのRSSI値Ra、Rbのチェックを行い(ステップS101、S102)、いずれかのRSSI値が閾値Th1(強磁界判定閾値)を超えていれば、自身のアンテナ26cのRSSI値Rcのチェックを行う(ステップS103)。
【0069】
そして、アンテナ26cのRSSI値Rcが閾値Th2(強磁界下での最低起電力)に満たない場合には、故障カウンタC1をインクリメントし(ステップS104)、C1≧Th3に達した時点で(ステップS106)、故障状態を記憶する(ステップS107)。
【0070】
図7の断線故障検出プログラムは、RSSI回路2402からRSSI値(受信電界強度)がCPU20に入力されるごとに1回のみ実行される。
なお、図7内の故障判定処理や故障記憶処理(ステップS106、S107)は、携帯機2内のCPU20による実行に限らず、携帯機2と通信する車載機1内のCPU10で実行してもよい。
【0071】
車載機1内のCPU10で故障を判定する場合、携帯機2内のRSSI回路2402で測定された各RSSI値は、RF送信回路23およびRF送信アンテナ25から、RF受信アンテナ32を介して車載機1内のCPU10に入力されることになる。
【0072】
車載機1内のCPU10で故障判定を行う場合、携帯機2は、認証コード220および認証応答信号とともに、車載機1から受信した電界強度測定用信号の各アンテナ26a〜26cでのRSSI値(電界強度測定値)を、車載機1に送信すればよい。
【0073】
図8は故障検出処理(図7)の具体的な動作例を示している。
図8のタイミングチャートにおいては、アンテナ26aのRSSI値Raが強磁界を検出している状況下において、アンテナ26cに断線故障が発生し、アンテナ26cのRSSI値Rcが閾値Th2に満たない状態を示している。
図8において、故障していないアンテナ26bのRSSI値Rbは、閾値Th2以上のレベルを満たしている。
【0074】
一方、アンテナ26cのRSSI値Rcは閾値Th2に満たないので、アンテナ26cの故障カウンタC1は、アンテナ26aのRSSI値Raが閾値Th1を超えるごとに、アンテナ26cのRSSI値Rc<Th2の判定結果に応答してインクリメントし続け、C1≧Th3に達した時点で故障が確定される。
【0075】
なお、ここでは代表的に、3つのアンテナ26a〜26cのうち最も重要な、トランスポンダ兼用のアンテナ26cの故障判定処理を例にとって説明したが、他のアンテナ26a、26bの故障判定処理も同様に行うことができる。
【0076】
以上のように、この発明の実施の形態1(図1〜図8)に係る無線通信システムは、車両100に搭載された無線通信機能を有する車載機1と、車両100のユーザ200によって携帯され、車載機1との間で無線通信機能を有する携帯機2とにより構成されている。
【0077】
車載機1は、CPU10と、認証コード110を記憶するメモリ11と、電界強度測定用信号および認証要求信号を携帯機2に送信するLF送信回路12と、携帯機2からの認証応答信号を受信するRF受信回路13と、を備えている。
CPU10は、携帯機2から受信した認証応答信号に含まれる認証コード220と、メモリ11内の認証コード110との照合を行う。
【0078】
携帯機2は、CPU20と、認証コード220を記憶するメモリ22と、電界強度測定用信号および認証要求信号を受信する複数の受信アンテナ26a〜26cおよびLF受信回路240と、メモリ22内の認証コード220および認証応答信号を車載機1に送信するRF送信回路23およびRF送信アンテナ25と、複数の受信アンテナ26a〜26cごとに電界強度測定用信号の受信電界強度を測定するRSSI回路2402(電界強度測定部)と、を備えている。
【0079】
携帯機2の複数の受信アンテナ26a〜26cは、互いに磁束検出方向の異なるコイルアンテナからなる。
CPU20は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値の相互比較結果に基づいて、複数の受信アンテナ26a〜26cのいずれかの故障状態を検出する故障検出手段を含む。
【0080】
または、携帯機2のCPU20は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値を、RF送信回路23を介して車載機1に送信する。
この場合、車載機1のCPU10は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値の相互比較結果に基づいて、複数の受信アンテナ26a〜26cのいずれかの故障状態を検出する故障検出手段を含む。
【0081】
故障検出手段(図7、図8)は、複数の受信アンテナ26a〜26cのうちの少なくとも1つの受信アンテナ(たとえば、アンテナ26aまたは26b)の受信電界強度測定値(RaまたはRb)が閾値Th1(第1の閾値)を超えたときに、複数の受信アンテナ26a〜26cのうちの他の1つの受信アンテナ(たとえば、アンテナ26c)の受信電界強度測定値(Rc)が、閾値Th1よりも小さい閾値Th2(第2の閾値)に満たない場合に、他の1つの受信アンテナ(アンテナ26c)の故障(断線故障)を検出する。
【0082】
さらに、故障検出手段(図7、図8)は、少なくとも1つの受信アンテナの受信電界強度測定値(たとえば、RaまたはRb)が閾値Th1を超えたときに、他の1つの受信電界強度測定値(Rc)が閾値Th2に満たない場合に、カウント値をインクリメントする故障カウンタC1(第1の故障カウンタ)を有し、故障カウンタC1が閾値Th3(第3の閾値)に達した時点で、他の1つの受信アンテナ(たとえば、アンテナ26c)の故障(断線故障)を確定して記憶する。
【0083】
一方、この発明の実施の形態1による故障検出手段は、複数の受信アンテナ26a〜26cのうちの少なくとも2つの受信アンテナの受信電界強度測定値が第2の閾値に満たないときに、複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値が、第2の閾値よりも大きい第1の閾値を超える場合に、他の1つの受信アンテナの増幅回路2400またはRSSI回路2402の故障(受信電界強度測定値が実際よりも大きくなる故障)を検出する。
【0084】
さらに、故障検出手段は、少なくとも2つの受信アンテナの受信電界強度測定値が第2の閾値に満たないときに、他の1つの受信電界強度測定値が第1の閾値を超えた場合に、カウント値をインクリメントする第1の故障カウンタを有し、第1の故障カウンタが第3の閾値に達した時点で、他の1つの受信アンテナの増幅回路2400またはRSSI回路2402の故障(受信電界強度測定値が実際より大きくなる故障)を確定して記憶する。
【0085】
また、複数の受信アンテナ26a〜26cの各コイル26a0〜26c0(図4〜図6)は、互いに直交する方向となるように、単一のコイルボビン260に巻回されている。
さらに、複数の受信アンテナ26a〜26cのうちの1つの受信アンテナ26cは、携帯機2の電池が切れた場合に車載機1と携帯機2との間で通信するためのトランスポンダ通信用の送受信アンテナの機能を兼ねている。
【0086】
故障検出手段は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値Ra〜Rcを複数回にわたって繰り返し取得する。
さらに、故障検出手段は、複数の受信アンテナ26a〜26cごとの各受信電界強度測定値Ra〜Rcのいずれかが故障の兆候を示す場合に、携帯機の移動をともなう可能性が高いタイミングとして、車両100のドア開閉時のタイミングで受信電界強度測定値Ra〜Rcを複数回にわたって繰り返し取得する。これにより、RSSI値(電界強度)を測定する機会を増やして故障診断精度を高め、故障検出の遅れや誤検出の可能性を減らすことができる。
【0087】
車載機1から携帯機2に送信される電界強度測定用信号および認証要求信号は、LF帯波を用いていることから、磁束の性質を有する。
また、携帯機2の受信アンテナ26a〜26cとしてはコイルアンテナが使用されるので、携帯機2の受信感度は、強い指向性を有し、磁束がコイル26a0〜26c0に直行する向きで最大となり、磁束がコイル26a0〜26c0に並行になると最小となる。
【0088】
スマートキーレスエントリシステムにおいては、車載機1側のLF送信アンテナ31aに対する携帯機2の向きおよび位置により、携帯機2における磁束の向きも変化することから、一方向の受信アンテナのみでは磁束を捉えられない状況が発生するので、複数の方向の受信アンテナ26a〜26cを設置することにより、受信不能に陥らないように工夫されている。
【0089】
携帯機2において、複数の受信アンテナ26a〜26c(コイルアンテナ)は、互いに相互インダクタンスなどの結合を有し、1つのアンテナが十分な強度の磁束を受信している条件下においては、他のアンテナも幾らかの電界強度を検出している。
よって、幾つかの受信アンテナが非常に強い電界強度を検出している条件下では、他の受信アンテナも相互インダクタンスなどの電磁結合によって閾値Th2以上の電界強度を検知するはずであり、電界強度が閾値Th2未満の状態が継続(C1≧Th3)する場合には、いずれかの受信系統の故障(断線故障)と判定することができる。
【0090】
この発明の実施の形態1によれば、スマートキーレスシステムに適用される無線通信システムにおいて、たとえユーザにとって違和感があっても、ユーザによる故障判定が困難な携帯機2の故障(携帯機2の一部の受信アンテナの故障)を、多大なコストを要することなく検出することができる。
【0091】
これにより、ユーザが故障と知らずに無線通信システムを使用し続けた際に、故障した受信アンテナの電界強度が異常なことに起因して、スマートキーレスシステムが携帯機2の位置を正しく把握できずに生じる異常動作に悩まされなくて済み、ユーザクレームを減少させることができる。
【0092】
特に、故障アンテナがトランスポンダ通信兼用のLF受信アンテナ26cであって、携帯機2の電池切れ時用のバックアップ機能と兼用されている場合、電池切れでバックアップ機能を使うまで故障に気付かないという不具合を防止することができる。
【0093】
さらに具体的には、故障判定手順(図7)が実行されるためには、ユーザ200が車両100のスイッチ類を操作しかつ携帯機2が高い磁界内に入っている必要があり、故障判定の機会が限られることから、故障が確定するまでに時間が掛かる。
たとえば、ユーザ200がスイッチ類を操作する機会は1日のうちに数回程度であり、故障カウンタC1が閾値Th3に達するまでに数日を要してしまうことになる。
【0094】
そこで、故障検出機会を増やすための対策として、故障カウンタC1のカウント値が所定回数に達した場合、いずれかの受信アンテナが高い磁束を受け始めると、車載機1は、故障判定用のRSSI値測定用信号の携帯機2への送信を繰返し実行することにより、故障の確定を早めるようにする。
【0095】
たとえば、故障カウンタC1のカウント値が所定回数を越えた場合、故障判定の機会を増やすために、車載機1は、LF送信アンテナ31a〜31cの出力レベルを変動させながら、繰返し故障検出用の送信アンテナ駆動を繰返す動作を行うことにより、携帯機2における故障判定の確定を早めることができる。
このとき、途中で故障カウンタC1が0クリアされた場合には、故障判定用のRSSI値測定用信号の繰返し送信動作を中止する機能を持たせる。
【0096】
また、上記説明では具体的に言及しなかったが、無線通信システムに診断モードを設けるとともに、診断モードに強制的に切替えるための外部操作手段(スイッチ類)の操作により、特別な専用装置を用いることなく、携帯機2の診断モードに移行可能な構成としてもよい。
【0097】
これにより、車両100のディーラやユーザ200が携帯機2の故障検出を行いたい場合に、特別な専用装置を使わずに、たとえばリクエストスイッチ33a、33b(および携帯機2の入力回路21の操作信号との組み合わせ)を所定手順で操作することにより、故障検出手段を有効化して、故障検出動作を繰返す診断モードに移行することができる。
【0098】
すなわち、スマートキーレスシステムの無線通信システムにおいて、たとえば、リクエストスイッチ31a、31bを複数回連続操作するなど所定の操作手順により、RSSI回路2402による電界強度測定を繰返す診断モード(図7、図8)に入るので、ディーラやユーザが携帯機2の故障点検および故障検出を容易に行うことができる。
【0099】
具体例としては、車載機1に入力されるリクエストスイッチ33a、33bの操作信号、または、制御装置4を介して車載機1に入力されるドア開閉信号、または、携帯機2の入力回路21を介して入力される施錠スイッチ信号または開錠スイッチ信号を、上記スイッチ操作信号と関連したモード切替え有効化信号として、車載機1に送信してもよい。
【0100】
車載機1は、携帯機2から送信される気中信号をRF受信アンテナ32で受信するが、このとき、RF受信回路13で復調して得られる携帯機2の施錠または開錠スイッチ信号(携帯機2の操作信号)をユーザ200が所定手順で操作することにより、モード切替えを有効化して、車載機1からのLF送信信号に基づく携帯機2のLF受信アンテナ26a〜26cの故障診断モードに移行することができる。
または、ディーラで行われる故障診断モードの一部として、携帯機2のLF受信アンテナ26a〜26cの故障診断モードに移行することができる。
【0101】
携帯機2のLF受信アンテナ26a〜26cの故障診断モードにおいて、車載機1は、故障判定用のRSSI値測定用信号の送信動作を繰返し実行し続けることになる。
さらに、携帯機2のLF受信アンテナ26a〜26cの故障診断モードにおいて、ユーザ200は、故障判定対象となる携帯機2を車載機1のLF送信アンテナ31aに近づけたり離したり、また、携帯機2の向きを回したりすることにより、故障判定処理手順を効率的に繰返し実行することができる。
【0102】
故障判定処理(図7、図8)による診断結果は、車載の制御装置4の表示器または報知器を介して、故障コード表示やランプ点灯またはブザー吹鳴などにより、作業者に知らせることができる。
【0103】
実施の形態2.
なお、上記実施の形態1(図7、図8)では、強磁界の環境下(Ra>Th1、または、Rb>Th1)で検出されるRSSI値(Rc)が閾値Th2(<Th1)に満たない場合に故障カウンタC1をインクリメントしたが、図9および図10に示すように、携帯機2の姿勢が大変動している環境下(dRa>Th4、または、dRb>Th4)で、RSSI値変動量dRc(=|今回値−前回値|)が閾値Th5(<Th4)に満たない場合に故障カウンタC2をインクリメントしてもよい。
【0104】
以下、図9および図10を参照しながら、この発明の実施の形態2による故障検出動作について、前述と同様に、代表的にアンテナ26cの断線故障を検出する場合を例にとって説明する。
【0105】
図9はこの発明の実施の形態2による受信アンテナ26cの故障検出処理を示すフローチャートであり、図10はこの発明の実施の形態2による受信アンテナ26cの故障検出処理を示すタイミングチャートである。
なお、この発明の実施の形態2に係る無線通信システムの構成は、前述(図1〜図6)と同様であり、携帯機2(図3)内のCPU20の動作プログラムが異なるのみである。
【0106】
この場合、磁束の中で携帯機2の位置や向きが大きく動いた場合、携帯機2のすべてのアンテナ26a〜26cのRSSI値Ra〜Rcが変動することを利用して故障検出を行う。
すなわち、図6のように、携帯機2のアンテナ26a〜26cは、ほぼ直行して配置されているので、少なくとも1つのアンテナのRSSI値が大きく変動すると、携帯機2の位置か向きが大きく変化したと推測できる。
【0107】
よって、携帯機2の姿勢変動状態(RSSI値の変動状態)でRSSI値が変化しない状態が長時間にわたって継続することは考えにくいので、RSSI値が変化しないアンテナコイルが断線故障しているか、または増幅回路やRSSI回路が故障していると判定することができる。
逆に、携帯機2の姿勢安定状態(RSSI値の無変動状態)でRSSI値の大きな変化を検出しているアンテナコイルの増幅回路やRSSI回路が故障(受信電界強度測定値が実際よりも大きくなる故障など)していると判定することもできる。
【0108】
図9においては、前述(図7)と同様に断線故障検出プログラムの一例を示している。
図9において、ステップS206〜S209は、前述(図7参照)のステップS104〜S107の処理に対応している。
【0109】
携帯機2(図3)内のCPU20は、まず、アンテナ26a〜26cのRSSI値Ra〜Rcの今回値から前回値を減算して各アンテナのRSSI値変動量dR(=|今回値−前回値|)を算出する(ステップS201)。
【0110】
続いて、次回の故障検出処理に備えて、各RSSI値Ra〜Rcの今回値を前回値として記憶する(ステップS202)。
以下、ステップS203、S204により、アンテナ26a、26bのRSSI値変動量dRa、dRbのいずれかが、閾値Th4(携帯機2の位置または向きの変化が十分大きいと見なされる大変動判定用の基準値)よりも大きいか否かを判定し、いずれかが閾値Th4を越えた場合は、アンテナ26cのRSSI値変動量dRcの判定処理(ステップS205)を行う。
【0111】
まず、アンテナ26aのRSSI値変動量dRaが閾値Th4よりも大きいか否かを判定し(ステップS203)、dRa>Th4(すなわち、YES)と判定されれば、アンテナ26cのRSSI値変動量dRcの判定処理(ステップS205)に移行する。
【0112】
一方、ステップS203において、dRa≦Th4(すなわち、NO)と判定されれば、続いて、アンテナ26bのRSSI値変動量dRbが閾値Th4よりも大きいか否かを判定し(ステップS204)、dRb≦Th4(すなわち、NO)と判定されれば、アンテナ26cの故障カウンタC2の判定処理(ステップS208)に移行する。
【0113】
一方、ステップS204において、dRb>Th4(すなわち、YES)と判定されれば、続いて、アンテナ26cのRSSI値変動量dRcが閾値Th5(RSSI値の大変動時に測定されるべき最小限の値<Th4)よりも小さいか否かを判定する(ステップS205)。
【0114】
ステップS205において、dRc<Th5(すなわち、YES)と判定されれば、アンテナ26cを含む回路系に断線故障の可能性があるので、アンテナ26cの故障カウンタC2をインクリメント(+1)して(ステップS206)、ステップS208に移行する。
【0115】
一方、ステップS205において、dRc≧Th5(すなわち、NO)と判定されれば、アンテナ26cを含む回路系が正常と見なされるので、アンテナ26cの故障カウンタC2を0クリアして(ステップS207)、ステップS208に移行する。
【0116】
ステップS208においては、アンテナ26cの故障カウンタC2のカウント数(故障判定回数)が閾値Th6(実際に故障していなければ達し得ない回数)以上に達したか否かを判定し、C2<Th6(すなわち、NO)と判定されれば、実際の故障発生とは確定されないので、図9の処理ルーチンを終了する。
【0117】
一方、ステップS208において、C2≧Th6(すなわち、YES)と判定されれば、実際の故障発生状態と見なし、アンテナ26cの故障を記憶して(ステップS209)、図9の処理ルーチンを終了する。
なお、図9において、故障確定用の閾値Th6は、前述(図7、図8)の閾値Th3と同一値であってもよい。
【0118】
また、前述(図7)と同様に、図9の故障検出プログラムは、RSSI値が入力されるごとに1回のみ実行される。
さらに、図9の故障判定処理や故障の記憶処理(ステップS209)は、携帯機2内のCPU20による実行に限定されることはなく、車載機1内のCPU10で実行してもよい。
【0119】
図10は故障検出処理(図9)の具体的な動作例を示している。
図10においては、アンテナ26a、26bのRSSI値Ra、Rbが十分に変動している状況下(dRa>Th4、dRb>Th4)で、アンテナ26cに断線故障が発生し、アンテナ26cのRSSI値変動量dRcが閾値Th5に満たない状態を示している。
【0120】
図10において、故障していないアンテナ26a、26bのRSSI値変動量dRa、dRbは、閾値Th4を超えている。
一方、断線故障したアンテナ26cのRSSI値変動量dRcは0レベルであり、閾値Th5に達することはない。
【0121】
よって、アンテナ26cの故障カウンタC2は、アンテナ26a、26bのいずれかのRSSI値変動量dRa、dRbが閾値Th4を超えるごとに、dRc<Th5の判定結果に応答してインクリメントし続け、C2≧Th6に達した時点で故障が確定される。
【0122】
なお、ここでは代表的に、3つのアンテナ26a〜26cのうち最も重要な、トランスポンダ兼用のアンテナ26cの故障判定処理を例にとって説明したが、他のアンテナ26a、26bの故障判定処理も同様に行うことができる。
【0123】
以上のように、この発明の実施の形態2(図1〜図6、図9、図10)に係る無線通信システムの故障検出手段は、複数の受信アンテナ26a〜26cのうちの少なくとも1つの受信アンテナの受信電界強度測定値の変動量(たとえば、dRaまたはdRb)が閾値Th4(第4の閾値)を超えたときに、複数の受信アンテナ26a〜26cのうちの他の1つの受信アンテナの受信電界強度測定値の変動量(たとえば、dRc)が、閾値Th4よりも小さい閾値Th5(第5の閾値)に満たない場合に、他の1つの受信アンテナ(たとえば、26c)の故障(断線故障)を検出する。
【0124】
さらに、この発明の実施の形態2による故障検出手段(図9、図10)は、少なくとも1つの受信アンテナの受信電界強度測定値の変動量が第閾値Th4を超えたときに、他の1つの受信電界強度測定値の変動量が閾値Th5に満たない場合に、カウント値をインクリメントする故障カウンタC2(第2の故障カウンタ)を有し、故障カウンタC2が閾値Th6(第6の閾値)に達した時点で、他の1つの受信アンテナの故障(断線故障)を確定して記憶する。
【0125】
一方、この発明の実施の形態2による故障検出手段は、複数の受信アンテナ26a〜26cのうちの少なくとも2つの受信アンテナの受信電界強度測定値の変動量が第5の閾値に満たないときに、複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値の変動量が、第5の閾値よりも大きい第4の閾値を超えた場合に、他の1つの受信アンテナの増幅回路またはRSSI回路の故障(受信電界強度測定値が実際よりも大きくなる故障)を検出する。
【0126】
さらに、故障検出手段は、少なくとも2つの受信アンテナの受信電界強度測定値の変動量が第5の閾値に満たないときに、他の1つの受信電界強度測定値の変動量が第4の閾値を超えた場合に、カウント値をインクリメントする第2の故障カウンタを有し、第2の故障カウンタが第6の閾値に達した時点で、他の1つの受信アンテナの増幅回路またはRSSI回路の故障(受信電界強度測定値が実際よりも大きくなる故障)を確定して記憶する。
【0127】
このように、任意の受信アンテナ(コイルアンテナ)のRSSI値(電界強度測定値)が前回値に対して閾値Th4を超える変化を示す場合に、携帯機2に印加される磁束の向きが変わった(携帯機2が移動したか、携帯機2の向きが変わった)ものと判定し、他に電界強度の変化が見られない(変動量が閾値Th5未満の)受信アンテナが存在した場合に、この条件下の状態が所定回数(閾値Th6)以上にわたって継続した時点で、変動量が閾値Th5未満の受信アンテナの受信系に異常が有ると判定する機能を有する。
【0128】
この場合も、前述の実施の形態1と同様に、スイッチ類の操作に応じた診断モードへの強制的切替えや故障報知など、種々の変形例を適用することが可能であり、前述の実施の形態1と同様の作用効果を奏する。
【0129】
実施の形態3.
なお、上記実施の形態2(図9、図10)では、RSSI値変動時の環境下で検出されるRSSI値変動量dRが閾値Th5に満たない場合に故障カウンタC2をインクリメントしたが、図11および図12に示すように、RSSI値変動時の環境下(dRa>Th7、または、dRb>Th7)において、2つのアンテナのRSSI値変動量の差分ΔdRac(=|dRc−dRa|)が閾値Th8に満たない場合に差分故障カウンタC3をインクリメントしてもよい。
【0130】
以下、図11および図12を参照しながら、この発明の実施の形態3による故障検出動作について、前述と同様に、代表的にアンテナ26cの断線故障を検出する場合を例にとって説明する。
【0131】
図11はこの発明の実施の形態3による受信アンテナ26cの故障検出処理を示すフローチャートであり、図12はこの発明の実施の形態3による受信アンテナ26cの故障検出処理を示すタイミングチャートである。
なお、この発明の実施の形態3に係る無線通信システムの構成は、前述(図1〜図6)と同様であり、携帯機2(図3)内のCPU20の動作プログラムが異なるのみである。
【0132】
この発明の実施の形態3においては、磁束中で携帯機2の位置や向きが大きく変動している場合に、携帯機2のアンテナ26a〜26cのRSSI値変動量dRa〜dRcが、相互間にほとんど差分が生じない状態を続けることは有り得ない、という事実を利用している。
【0133】
以下、この発明の実施の形態3による故障検出原理について説明する。
前述(図4〜図6)の通り、携帯機2のアンテナ26a〜26cは、ほぼ直行して配置されているので、複数のアンテナの各RSSI値変動量が同一値であり続けるように携帯機2の位置または向きを変化させ続けることは困難である。
【0134】
よって、いずれかのアンテナのRSSI値が所定値以上変化している(携帯機2の位置または向きが変化している)際に、複数のアンテナのRSSI値変動量が同一値のままの状態が長時間続くことは考え難いので、たとえばRSSI値変動量が同一値を示すアンテナコイルは互いに接触故障している可能性がある。または、逆に、RSSI値変動量が大きいアンテナコイルの増幅回路やRSSI回路にも故障があるものと判定することができる。
【0135】
図11においては、アンテナ26aとアンテナ26cとの間でショート故障が発生した場合の、アンテナ26a、26cの故障検出プログラムの一例を示している。
図11において、ステップS301〜S303は、前述(図9参照)のステップS201〜S203の処理に対応している。
【0136】
携帯機2(図3)内のCPU20は、まず、アンテナ26a、26cのRSSI値の今回値から前回値を減算して各アンテナのRSSI値変動量dRa、dRcを算出する(ステップS301)。
続いて、次回の処理に備えて、アンテナ26a、26cの今回のRSSI値Ra、Rcを前回値として記憶する(ステップS302)。
【0137】
以下、ステップS303、S304により、アンテナ26a、26cのRSSI値変動量dRa、dRcのいずれかが閾値Th7(携帯機2の位置または向きの変化が十分大きいと見なされる大変動判定用の基準値)よりも大きいか否かを判定し、いずれかが閾値Th7を越えた場合は、差分算出処理(ステップS305)に移行し、いずれも閾値Th7を超えていない場合には、差分故障カウンタC3の判定処理(ステップS309)に移行する。
【0138】
まず、アンテナ26aのRSSI値変動量dRaが閾値Th7よりも大きいか否かを判定し(ステップS303)、dRa>Th7(すなわち、YES)と判定されれば、後述の差分算出処理(ステップS305)に移行する。
なお、図11において、大変動判定用の基準値となる閾値Th7は、前述(図9、図10)の閾値Th4と同一値であってもよい。
【0139】
一方、ステップS303において、dRa≦Th7(すなわち、NO)と判定されれば、続いて、アンテナ26cのRSSI値変動量dRcが閾値Th7よりも大きいか否かを判定し(ステップS304)、dRc≦Th7(すなわち、NO)と判定されれば、差分故障カウンタC3の判定処理(ステップS309)に移行する。
【0140】
一方、ステップS304において、dRc>Th7(すなわち、YES)と判定されれば、RSSI値変動量が十分に大きい状態にあるものと見なし、アンテナ26a、26cのRSSI値変動量dRa、dRcの差分ΔdRac(=|dRc−dRa|)を算出する(ステップS305)。
【0141】
続いて、アンテナ26a、26cのRSSI値変動量の差分ΔdRacが閾値Th8(アンテナ26a、26cが短絡したものと見なせる微小差分)よりも小さいか否かを判定する(ステップS306)。
【0142】
ステップS306において、ΔdRac<Th8(すなわち、YES)と判定されれば、アンテナ26a、26cの差分故障カウンタC3をインクリメント(+1)して(ステップS307)、ステップS309に移行する。
一方、ステップS306において、ΔdRac≧Th8(すなわち、NO)と判定されれば、差分故障カウンタC3を0クリアして(ステップS308)、ステップS309に移行する。
【0143】
ステップS309においては、差分故障カウンタC3のカウント数が閾値Th9(実際に短絡故障していなければ達し得ない回数)以上に達したか否かを判定し、C3<Th9(すなわち、NO)と判定されれば、実際の短絡故障発生とは確定されないので、図11の処理ルーチンを終了する。
なお、故障確定用の閾値Th9は、前述(図9、図10)の閾値Th6と同一値であってもよい。
【0144】
一方、ステップS309において、C3≧Th9(すなわち、YES)と判定されれば、実際の短絡故障発生状態と見なし、アンテナ26a、26cの故障を記憶して(ステップS310)、図11の処理ルーチンを終了する。
【0145】
なお、前述(図9)と同様に、図11の短絡故障検出プログラムは、RSSI値が入力されるごとに1回のみ実行される。
また、図11の短絡故障判定処理や故障の記憶処理(ステップS310)は、携帯機2内のCPU20による実行に限定されることはなく、車載機1内のCPU10で実行されてもよい。
【0146】
図12は短絡故障検出処理(図11)の具体的な動作例を示している。
図12においては、アンテナ26a、26cのRSSI値Ra、Rcが十分に変動している状況下(dRa>Th7、dRc>Th7)で、アンテナ26a、26cの相互間で短絡故障が発生し、アンテナ26a、26cのRSSI値変動量の差分ΔdRacが閾値Th8に満たない状態を示している。
【0147】
図12において、短絡故障しているアンテナ26a、26cのRSSI値変動量dRa、dRcは、閾値Th7を超えている。
また、RSSI値変動量dRa、dRcの差分ΔdRac(=|dRc−dRa|)は、閾値Th8に達していない。
【0148】
よって、差分故障カウンタC3は、アンテナ26a、26cのRSSI値変動量dRa、dRcが閾値Th7を超えるごとに、ΔdRac<Th8の判定結果に応答してインクリメントし続け、C3≧Th9に達した時点で故障が確定される。
なお、ここでは代表的に、2つのアンテナ26a、26cの短絡故障判定処理を例にとって説明したが、他の2つのアンテナの組合せ、すなわち、アンテナ26a、26b、アンテナ26b、26cについても、同様に短絡故障判定処理を行うことができる。
【0149】
以上のように、この発明の実施の形態3(図1〜図6、図11、図12)に係る無線通信システムの故障検出手段は、複数の受信アンテナ26a〜26cのうちの2つの受信アンテナの受信電界強度測定値の変動量(たとえば、dRaまたはdRc)の少なくとも一方が閾値Th7(第7の閾値)を超えたときに、2つの受信アンテナの受信電界強度測定値の各変動量の差分(ΔdRac=dRc−dRa)が、閾値Th7よりも小さい閾値Th8(第8の閾値)に満たない場合に、2つの受信アンテナ(たとえば、26a、26c)の故障(短絡故障)を検出する。
【0150】
さらに、この発明の実施の形態3による故障検出手段(図11、図12)は、2つの受信アンテナの受信電界強度測定値の変動量(たとえば、dRaまたはdRc)の少なくとも一方が閾値Th7を超えたときに、2つの受信アンテナの受信電界強度測定値の各変動量の差分(たとえば、ΔdRac)が、閾値Th8に満たない場合に、カウント値をインクリメントする差分故障カウンタC3(第3の故障カウンタ)を有し、差分故障カウンタC3が閾値Th9(第9の閾値)に達した時点で、2つの受信アンテナ(たとえば、26a、26c)の故障(短絡故障)を確定して記憶する。
【0151】
このように、複数の受信アンテナ26a〜26cの電界強度が一定値以上変動している状態において、2つの受信アンテナの電界強度の各変動量の間に差分が見られない(差分が閾値Th8未満の)状態が長時間継続する場合に、2つの受信アンテナの受信系の異常と判定する機能を有する。
【0152】
この場合も、前述の実施の形態1、2と同様に、スイッチ類の操作に応じた診断モードへの強制的切替えや故障報知など、種々の変形例を適用することが可能であり、前述の実施の形態1、2と同様の作用効果を奏する。
【符号の説明】
【0153】
1 車載機、2 携帯機、4 制御装置、10 CPU、11 メモリ、12 LF送信回路、13 RF受信回路、17 スイッチ入力回路、18 トランスポンダ通信用回路、20 CPU、21 入力回路、22 メモリ、23 RF送信回路、24 LF通信回路、25 RF送信アンテナ、26a〜26c アンテナ(LF受信アンテナ)、26a0〜26c0 コイル、31a〜31c LF送信アンテナ、32 RF受信アンテナ、33a、33b リクエストスイッチ、34 スタートスイッチ、35 トランスポンダ通信用アンテナ、100 車両、110 認証コード、121 変調回路、122 増幅回路、131 RF復調回路、132 増幅回路、200 ユーザ、220 認証コード、240 LF受信回路、241 トランスポンダ機能選択回路、242 トランスポンダ機能回路、243 メモリ、260 コイルボビン、2400 増幅回路、2401 LF復調回路、2402 RSSI回路、2430 認証コード、C1、C2 故障カウンタ、C3 差分故障カウンタ、dRa、dRb、dRc RSSI値変動量、Ra、Rb、Rc RSSI値、Th1〜Th9 閾値、ΔdRac RSSI値変動量の差分。
【特許請求の範囲】
【請求項1】
車両に搭載された無線通信機能を有する車載機と、
前記車両のユーザによって携帯され、前記車載機との間で無線通信機能を有する携帯機とにより構成される無線通信システムであって、
前記車載機は、
車載機CPUと、
認証コードを記憶する車載機メモリと、
電界強度測定用信号および認証要求信号を前記携帯機に送信するLF送信回路と、
前記携帯機からの認証応答信号を受信する受信回路と、を備え、
前記車載機CPUは、前記携帯機から受信した認証応答信号に含まれる認証コードと、前記車載機メモリ内の認証コードとの照合を行い、
前記携帯機は、
携帯機CPUと、
前記認証コードを記憶する携帯機メモリと、
前記電界強度測定用信号および前記認証要求信号を受信する複数の受信アンテナおよびLF受信回路と、
前記携帯機メモリ内の認証コードおよび前記認証応答信号を前記車載機に送信する送信回路と、
前記複数の受信アンテナごとに前記電界強度測定用信号の受信電界強度を測定する電界強度測定部と、を備え、
前記携帯機の複数の受信アンテナは、互いに磁束検出方向の異なるコイルアンテナからなり、
前記携帯機CPUは、
前記複数の受信アンテナごとの各受信電界強度測定値の相互比較結果に基づいて、前記複数の受信アンテナのいずれかの故障状態を検出する故障検出手段を含むことを特徴とする無線通信システム。
【請求項2】
車両に搭載された無線通信機能を有する車載機と、
前記車両のユーザによって携帯され、前記車載機との間で無線通信機能を有する携帯機とにより構成される無線通信システムであって、
前記車載機は、
車載機CPUと、
認証コードを記憶する車載機メモリと、
電界強度測定用信号および認証要求信号を前記携帯機に送信するLF送信回路と、
前記携帯機からの認証応答信号を受信する受信回路と、を備え、
前記車載機CPUは、前記携帯機から受信した認証応答信号に含まれる認証コードと、前記車載機メモリ内の認証コードとの照合を行い、
前記携帯機は、
携帯機CPUと、
前記認証コードを記憶する携帯機メモリと、
前記電界強度測定用信号および前記認証要求信号を受信する複数の受信アンテナおよびLF受信回路と、
前記携帯機メモリ内の認証コードおよび前記認証応答信号を前記車載機に送信する送信回路と、
前記複数の受信アンテナごとに前記電界強度測定用信号の受信電界強度を測定する電界強度測定部と、を備え、
前記携帯機の複数の受信アンテナは、互いに磁束検出方向の異なるコイルアンテナからなり、
前記携帯機CPUは、前記複数の受信アンテナごとの各受信電界強度測定値を、前記送信回路を介して前記車載機に送信し、
前記車載機CPUは、
前記複数の受信アンテナごとの各受信電界強度測定値の相互比較結果に基づいて、前記複数の受信アンテナのいずれかの故障状態を検出する故障検出手段を含むことを特徴とする無線通信システム。
【請求項3】
前記故障検出手段は、
前記複数の受信アンテナのうちの少なくとも1つの受信アンテナの受信電界強度測定値が、強磁界判定用の第1の閾値を超えたときに、前記複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値が、前記第1の閾値よりも小さい第2の閾値に満たない場合に、前記他の1つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項4】
前記故障検出手段は、
前記少なくとも1つの受信アンテナの受信電界強度測定値が前記第1の閾値を超えたときに、前記他の1つの受信電界強度測定値が前記第2の閾値に満たない場合に、カウント値をインクリメントする第1の故障カウンタを有し、
前記第1の故障カウンタが第3の閾値に達した時点で、前記他の1つの受信アンテナの故障を確定して記憶することを特徴とする請求項3に記載の無線通信システム。
【請求項5】
前記故障検出手段は、
前記複数の受信アンテナのうちの少なくとも2つの受信アンテナの受信電界強度測定値が、弱磁界判定用の第2の閾値に満たないときに、前記複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値が、前記第2の閾値よりも大きい第1の閾値を超える場合に、前記他の1つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項6】
前記故障検出手段は、
前記少なくとも2つの受信アンテナの受信電界強度測定値が前記第2の閾値に満たないときに、前記他の1つの受信電界強度測定値が前記第1の閾値を超えた場合に、カウント値をインクリメントする第1の故障カウンタを有し、
前記第1の故障カウンタが第3の閾値に達した時点で、前記他の1つの受信アンテナの故障を確定して記憶することを特徴とする請求項5に記載の無線通信システム。
【請求項7】
前記故障検出手段は、
前記複数の受信アンテナのうちの少なくとも1つの受信アンテナの受信電界強度測定値の変動量が、大変動判定用の第4の閾値を超えたときに、前記複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値の変動量が、前記第4の閾値よりも小さい第5の閾値に満たない場合に、前記他の1つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項8】
前記故障検出手段は、
前記少なくとも1つの受信アンテナの受信電界強度測定値の変動量が前記第4の閾値を超えたときに、前記他の1つの受信電界強度測定値の変動量が前記第5の閾値に満たない場合に、カウント値をインクリメントする第2の故障カウンタを有し、
前記第2の故障カウンタが第6の閾値に達した時点で、前記他の1つの受信アンテナの故障を確定して記憶することを特徴とする請求項7に記載の無線通信システム。
【請求項9】
前記故障検出手段は、
前記複数の受信アンテナのうちの少なくとも2つの受信アンテナの受信電界強度測定値の変動量が、無変動判定用の第5の閾値に満たないときに、前記複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値の変動量が、前記第5の閾値よりも大きい第4の閾値を超えた場合に、前記他の1つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項10】
前記故障検出手段は、
前記少なくとも2つの受信アンテナの受信電界強度測定値の変動量が前記第5の閾値に満たないときに、前記他の1つの受信電界強度測定値の変動量が前記第4の閾値を超えた場合に、カウント値をインクリメントする第2の故障カウンタを有し、
前記第2の故障カウンタが第6の閾値に達した時点で、前記他の1つの受信アンテナの故障を確定して記憶することを特徴とする請求項9に記載の無線通信システム。
【請求項11】
前記故障検出手段は、
前記複数の受信アンテナのうちの2つの受信アンテナの受信電界強度測定値の変動量の少なくとも一方が、大変動判定用の第7の閾値を超えたときに、前記2つの受信アンテナの受信電界強度測定値の各変動量の差分が、前記第7の閾値よりも小さい第8の閾値に満たない場合に、前記2つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項12】
前記故障検出手段は、
前記2つの受信アンテナの受信電界強度測定値の変動量の少なくとも一方が第7の閾値を超えたときに、前記2つの受信アンテナの受信電界強度測定値の各変動量の差分が、前記第8の閾値に満たない場合に、カウント値をインクリメントする第3の故障カウンタを有し、
前記第3の故障カウンタが第9の閾値に達した時点で、前記2つの受信アンテナの故障を確定して記憶することを特徴とする請求項11に記載の無線通信システム。
【請求項13】
前記複数の受信アンテナの各コイルは、互いに直交する方向となるように、単一のコイルボビンに巻回されたことを特徴とする請求項1から請求項12までのいずれか1項に記載の無線通信システム。
【請求項14】
前記複数の受信アンテナのうちの1つは、前記携帯機の電池が切れた場合に前記車載機と前記携帯機との間で通信するためのトランスポンダ通信用の送受信アンテナの機能を兼ねることを特徴とする請求項1から請求項13までのいずれか1項に記載の無線通信システム。
【請求項15】
前記故障検出手段は、
前記複数の受信アンテナごとの各受信電界強度測定値を複数回にわたって繰り返し取得することを特徴とする請求項1から請求項14までのいずれか1項に記載の無線通信システム。
【請求項16】
前記故障検出手段は、
前記複数の受信アンテナごとの各受信電界強度測定値のいずれかが故障の兆候を示す場合に、前記車両のドア開閉時のタイミングで前記受信電界強度測定値を複数回にわたって繰り返し取得することを特徴とする請求項15に記載の無線通信システム。
【請求項17】
前記車両に設けられた操作入力手段を備え、
前記故障検出手段は、前記操作入力手段からの所定の操作入力に応答して有効化され、強制的に診断モードに移行することを特徴とする請求項1から請求項16までのいずれか1項に記載の無線通信システム。
【請求項18】
前記車両に搭載されて表示器または報知器を有する制御装置を備え、
前記制御装置は、前記故障検出手段からの故障検出結果を、前記表示器または前記報知器を介して前記車両のユーザに知らせることを特徴とする請求項1から請求項17までのいずれか1項に記載の無線通信システム。
【請求項1】
車両に搭載された無線通信機能を有する車載機と、
前記車両のユーザによって携帯され、前記車載機との間で無線通信機能を有する携帯機とにより構成される無線通信システムであって、
前記車載機は、
車載機CPUと、
認証コードを記憶する車載機メモリと、
電界強度測定用信号および認証要求信号を前記携帯機に送信するLF送信回路と、
前記携帯機からの認証応答信号を受信する受信回路と、を備え、
前記車載機CPUは、前記携帯機から受信した認証応答信号に含まれる認証コードと、前記車載機メモリ内の認証コードとの照合を行い、
前記携帯機は、
携帯機CPUと、
前記認証コードを記憶する携帯機メモリと、
前記電界強度測定用信号および前記認証要求信号を受信する複数の受信アンテナおよびLF受信回路と、
前記携帯機メモリ内の認証コードおよび前記認証応答信号を前記車載機に送信する送信回路と、
前記複数の受信アンテナごとに前記電界強度測定用信号の受信電界強度を測定する電界強度測定部と、を備え、
前記携帯機の複数の受信アンテナは、互いに磁束検出方向の異なるコイルアンテナからなり、
前記携帯機CPUは、
前記複数の受信アンテナごとの各受信電界強度測定値の相互比較結果に基づいて、前記複数の受信アンテナのいずれかの故障状態を検出する故障検出手段を含むことを特徴とする無線通信システム。
【請求項2】
車両に搭載された無線通信機能を有する車載機と、
前記車両のユーザによって携帯され、前記車載機との間で無線通信機能を有する携帯機とにより構成される無線通信システムであって、
前記車載機は、
車載機CPUと、
認証コードを記憶する車載機メモリと、
電界強度測定用信号および認証要求信号を前記携帯機に送信するLF送信回路と、
前記携帯機からの認証応答信号を受信する受信回路と、を備え、
前記車載機CPUは、前記携帯機から受信した認証応答信号に含まれる認証コードと、前記車載機メモリ内の認証コードとの照合を行い、
前記携帯機は、
携帯機CPUと、
前記認証コードを記憶する携帯機メモリと、
前記電界強度測定用信号および前記認証要求信号を受信する複数の受信アンテナおよびLF受信回路と、
前記携帯機メモリ内の認証コードおよび前記認証応答信号を前記車載機に送信する送信回路と、
前記複数の受信アンテナごとに前記電界強度測定用信号の受信電界強度を測定する電界強度測定部と、を備え、
前記携帯機の複数の受信アンテナは、互いに磁束検出方向の異なるコイルアンテナからなり、
前記携帯機CPUは、前記複数の受信アンテナごとの各受信電界強度測定値を、前記送信回路を介して前記車載機に送信し、
前記車載機CPUは、
前記複数の受信アンテナごとの各受信電界強度測定値の相互比較結果に基づいて、前記複数の受信アンテナのいずれかの故障状態を検出する故障検出手段を含むことを特徴とする無線通信システム。
【請求項3】
前記故障検出手段は、
前記複数の受信アンテナのうちの少なくとも1つの受信アンテナの受信電界強度測定値が、強磁界判定用の第1の閾値を超えたときに、前記複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値が、前記第1の閾値よりも小さい第2の閾値に満たない場合に、前記他の1つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項4】
前記故障検出手段は、
前記少なくとも1つの受信アンテナの受信電界強度測定値が前記第1の閾値を超えたときに、前記他の1つの受信電界強度測定値が前記第2の閾値に満たない場合に、カウント値をインクリメントする第1の故障カウンタを有し、
前記第1の故障カウンタが第3の閾値に達した時点で、前記他の1つの受信アンテナの故障を確定して記憶することを特徴とする請求項3に記載の無線通信システム。
【請求項5】
前記故障検出手段は、
前記複数の受信アンテナのうちの少なくとも2つの受信アンテナの受信電界強度測定値が、弱磁界判定用の第2の閾値に満たないときに、前記複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値が、前記第2の閾値よりも大きい第1の閾値を超える場合に、前記他の1つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項6】
前記故障検出手段は、
前記少なくとも2つの受信アンテナの受信電界強度測定値が前記第2の閾値に満たないときに、前記他の1つの受信電界強度測定値が前記第1の閾値を超えた場合に、カウント値をインクリメントする第1の故障カウンタを有し、
前記第1の故障カウンタが第3の閾値に達した時点で、前記他の1つの受信アンテナの故障を確定して記憶することを特徴とする請求項5に記載の無線通信システム。
【請求項7】
前記故障検出手段は、
前記複数の受信アンテナのうちの少なくとも1つの受信アンテナの受信電界強度測定値の変動量が、大変動判定用の第4の閾値を超えたときに、前記複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値の変動量が、前記第4の閾値よりも小さい第5の閾値に満たない場合に、前記他の1つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項8】
前記故障検出手段は、
前記少なくとも1つの受信アンテナの受信電界強度測定値の変動量が前記第4の閾値を超えたときに、前記他の1つの受信電界強度測定値の変動量が前記第5の閾値に満たない場合に、カウント値をインクリメントする第2の故障カウンタを有し、
前記第2の故障カウンタが第6の閾値に達した時点で、前記他の1つの受信アンテナの故障を確定して記憶することを特徴とする請求項7に記載の無線通信システム。
【請求項9】
前記故障検出手段は、
前記複数の受信アンテナのうちの少なくとも2つの受信アンテナの受信電界強度測定値の変動量が、無変動判定用の第5の閾値に満たないときに、前記複数の受信アンテナのうちの他の1つの受信アンテナの受信電界強度測定値の変動量が、前記第5の閾値よりも大きい第4の閾値を超えた場合に、前記他の1つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項10】
前記故障検出手段は、
前記少なくとも2つの受信アンテナの受信電界強度測定値の変動量が前記第5の閾値に満たないときに、前記他の1つの受信電界強度測定値の変動量が前記第4の閾値を超えた場合に、カウント値をインクリメントする第2の故障カウンタを有し、
前記第2の故障カウンタが第6の閾値に達した時点で、前記他の1つの受信アンテナの故障を確定して記憶することを特徴とする請求項9に記載の無線通信システム。
【請求項11】
前記故障検出手段は、
前記複数の受信アンテナのうちの2つの受信アンテナの受信電界強度測定値の変動量の少なくとも一方が、大変動判定用の第7の閾値を超えたときに、前記2つの受信アンテナの受信電界強度測定値の各変動量の差分が、前記第7の閾値よりも小さい第8の閾値に満たない場合に、前記2つの受信アンテナの故障を検出することを特徴とする請求項1または請求項2に記載の無線通信システム。
【請求項12】
前記故障検出手段は、
前記2つの受信アンテナの受信電界強度測定値の変動量の少なくとも一方が第7の閾値を超えたときに、前記2つの受信アンテナの受信電界強度測定値の各変動量の差分が、前記第8の閾値に満たない場合に、カウント値をインクリメントする第3の故障カウンタを有し、
前記第3の故障カウンタが第9の閾値に達した時点で、前記2つの受信アンテナの故障を確定して記憶することを特徴とする請求項11に記載の無線通信システム。
【請求項13】
前記複数の受信アンテナの各コイルは、互いに直交する方向となるように、単一のコイルボビンに巻回されたことを特徴とする請求項1から請求項12までのいずれか1項に記載の無線通信システム。
【請求項14】
前記複数の受信アンテナのうちの1つは、前記携帯機の電池が切れた場合に前記車載機と前記携帯機との間で通信するためのトランスポンダ通信用の送受信アンテナの機能を兼ねることを特徴とする請求項1から請求項13までのいずれか1項に記載の無線通信システム。
【請求項15】
前記故障検出手段は、
前記複数の受信アンテナごとの各受信電界強度測定値を複数回にわたって繰り返し取得することを特徴とする請求項1から請求項14までのいずれか1項に記載の無線通信システム。
【請求項16】
前記故障検出手段は、
前記複数の受信アンテナごとの各受信電界強度測定値のいずれかが故障の兆候を示す場合に、前記車両のドア開閉時のタイミングで前記受信電界強度測定値を複数回にわたって繰り返し取得することを特徴とする請求項15に記載の無線通信システム。
【請求項17】
前記車両に設けられた操作入力手段を備え、
前記故障検出手段は、前記操作入力手段からの所定の操作入力に応答して有効化され、強制的に診断モードに移行することを特徴とする請求項1から請求項16までのいずれか1項に記載の無線通信システム。
【請求項18】
前記車両に搭載されて表示器または報知器を有する制御装置を備え、
前記制御装置は、前記故障検出手段からの故障検出結果を、前記表示器または前記報知器を介して前記車両のユーザに知らせることを特徴とする請求項1から請求項17までのいずれか1項に記載の無線通信システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2013−110501(P2013−110501A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252492(P2011−252492)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000006013)三菱電機株式会社 (33,312)
【Fターム(参考)】
[ Back to top ]