
無線通信方法及び車両通信システム
【課題】路車間通信と車車間通信を共用する無線通信方式において、危険度の高い車載端末に優先的に通信資源を割り当てることで、車載端末の数が増えた場合であっても安全を保つことを目的とする。
【解決手段】車載端末と路側機が1つの無線伝送路を利用して多重化通信を行う車両通信システムにおける無線通信方法であって、車載端末が自車両に関する情報を取得する工程と、車載端末が、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する工程と、車載端末が、算出された危険度を前記路側機に通知する工程と、路側機が、危険度の高い車両の車載端末から優先的に通信資源を割り当てる工程と、を含む。危険度の算出は、通知された周辺車両に関する情報にも基づいて算出することが好適である。車両に関する情報としては、車両の挙動、車両の操作、運転者の状態を含むことが好適である。
【解決手段】車載端末と路側機が1つの無線伝送路を利用して多重化通信を行う車両通信システムにおける無線通信方法であって、車載端末が自車両に関する情報を取得する工程と、車載端末が、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する工程と、車載端末が、算出された危険度を前記路側機に通知する工程と、路側機が、危険度の高い車両の車載端末から優先的に通信資源を割り当てる工程と、を含む。危険度の算出は、通知された周辺車両に関する情報にも基づいて算出することが好適である。車両に関する情報としては、車両の挙動、車両の操作、運転者の状態を含むことが好適である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両通信システムにおける無線通信技術に関する。
【背景技術】
【0002】
安全性の向上、輸送効率の向上、快適性の向上などを目的として、情報通信技術を用いて道路と車両とを一体のシステムとした高度道路交通システム(ITS:Intelligent Transport System)の開発が進められている。ITSでは、路上に設置された路側機と車両に搭載された車載機との間の路車間通信、車載機同士の間の車車間通信によって、上記の目的を実現しようとしている。
【0003】
このように、車両に搭載される車載機は、路車間通信と車車間通信の両方を行う必要がある。ここで、路車間通信と車車間通信とで異なる無線通信方式を用いると、周波数資源利用効率が低下すると共に、車載機の複雑化やコストの上昇を招いてしまう。したがって、無線回路などの共用が可能なように、変調方式、周波数などを路車間通信と車車間通信とで同一とすることが好ましい。
【0004】
路車間通信と車車間通信を両立させるための通信方式として、路車間通信と車車間通信を時間的に分割する方式が提案されている(例えば、特許文献1)。このような方式では、路車間通信と車車間通信に割り当てる時間の割合を固定にしたり、リクエストがあったノードに割り振ったりしているが、ノード数が増えるとオーバーフローしてしまう。路車間通信や車車間通信では安全に関わる情報が交換されているため、緊急度の高い通信が送信できない場合には、事故等を引き起こしてしまう可能性がある。
【0005】
また、車車間通信における周波数チャネルの割当て方法として、交差点に進入する車両の画像を撮影し、画像に基づいて衝突の危険度を予測し、危険度の高い車両に優先的に周波数チャネルを割り当てる方法が提案されている(特許文献2)。この方法によれば、危険度の高い車両に優先して周波数チャネルが割り当てられるため、車両の数が増えた場合であっても、安全性を向上することができる。
【特許文献1】特開2000−165313号公報
【特許文献2】特開2005−32010号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は、路車間通信と車車間通信を共用する無線通信方式において、危険度の高い車載端末に優先的に通信資源を割当てることで、車載端末の数が増えた場合であっても安全を保つことを目的とする。
【課題を解決するための手段】
【0007】
本発明は、複数の車載端末と少なくとも1つの路側機とから構成され、これらのノードが1つの無線伝送路を利用して多重化通信を行う車両通信システムにおける無線通信方法である。1つの無線伝送路を利用した多重化通信としては、時分割多元接続、周波数分割多元接続、符号分割多元接続などの方式を採用可能である。
【0008】
本発明に係る無線通信方法は、上記目的を達成するために、車載端末が自車両に関する情報を取得する工程と、車載端末が、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する工程と、車載端末が、算出された危険度を前記路側機に通知する工程と、路側機が、危険度の高い車両の車載端末から優先的に通信資源を割り
当てる工程と、を含む。
【0009】
このように、危険度の高い車両に対して優先的に通信資源を割り当てることで、車両の数が増えてしまい、通信を行えない車両が生じてしまった場合であっても、緊急度の高い通信を行う車両に対しては確実に通信資源の割当てを行える。したがって、車両の数が増えた場合であっても、安全を保つことができる。
【0010】
本発明では、危険度の算出処理を各車両で行っており、算出処理が分散される。したがって、路側機などの1つの装置で集中して危険度の算出を行う場合に比較して、処理の効率化がなされるという利点もある。
【0011】
ここで、本発明は、車載端末が、取得した自車両に関する情報を他の車載端末に通知する工程をさらに含み、危険度を算出する工程では、自車両に関する情報に加えて、通知された他車両に関する情報にも基づいて危険度が算出されることが好適である。
【0012】
このように、自車両に関する情報だけでなく、他車両に関する情報も用いて、自車両の危険の程度をより正確に算出することができる。
【0013】
なお、車両に関する情報には、車両の挙動に関する情報や、車両の操作に関する情報や、車両の運転者の状態に関する情報が含まれる。
【0014】
車両の挙動に関する情報は、運転者による操作やその他の外部要因(路面状態や風など)の結果として、車両がどのような挙動を示すかを表す情報である。この情報は、車両の挙動をセンサによって測定することによって得ることができる。車両の挙動に関する情報の典型的な例として、車両の速度や加速度を挙げることができる。
【0015】
車両の操作に関する情報は、運転者が車両に対してどのような操作を行ったかを表す情報である。この情報は、ハンドルやペダル等のユーザとのインタフェースの動作状況を取得することによって得ることができる。車両の操作に関する情報の例としては、ハンドル、アクセル、ブレーキ、ウィンカー、クラクションなどの操作状況に関する情報を挙げることができる。
【0016】
車両の運転者の状態に関する情報は、運転者の生理・生体情報を含む。この情報は、運転者の生理情報を測定したり、運転者の画像を撮影し解析したり、運転者の発する声を音声認識したりすることにより得ることができる。車両の運転者の状態に関する情報の例としては、運転者の心拍数、血圧、発汗の状態、脳波や、運転者の表情や発声を挙げることができる。
【0017】
本発明において、危険度は以下のようにして算出することが好適である。すなわち、車両に関する情報が複数の情報から構成されており、その各々について情報の内容に基づいて危険を表すスコアを算出し、算出した複数のスコアの合計として危険度を求めることが好適である。なお、車両に関する情報の各々について、その情報の内容と危険を表すスコアの関係をテーブルとしてあらかじめ保持しておき、このテーブルを参照してスコアを求める構成を採用することができる。また、危険度を複数のスコアの合計として求めているが、複数のスコアの平均も実質的に複数のスコアの合計を求めていることと同等である。また、複数のスコアの合計は単純な合計(単純和)であっても良く、重み付けをした合計(重み付け和)であっても構わない。
【0018】
このように、車両に関する情報を複数利用する場合であっても、それぞれについてスコアを算出しその和を求めるだけであれば、処理の負荷はそれほどかからない。したがって
、車両側で危険度を算出する場合にも、高速に危険度の算出を行える。
【0019】
本発明において、車両あるいは路側機に割り当てる通信資源には、以下のものが含まれる。多重化通信の方式が時分割多元接続方式である場合には、通信資源はタイムスロットとなる。多重化通信の方式が周波数分割多元接続方式である場合には、通信資源は周波数チャネル(周波数スロット)である。多重化通信の方式が符号分割多元接続方式である場合には、通信資源は拡散符号である。なお、通信資源(タイムスロット、周波数チャネル、拡散符号等)は、1つの車両に対して複数割り当てられても良い。複数のタイムスロット等が割り当てられた車両は、より高速に通信することが可能となる。したがって、危険度が高い車両に対しては複数のタイムスロット等を割り当てることも好適である。
【0020】
なお、本発明は、上記処理の少なくとも一部を含む無線通信方法として捉えることができる。また、本発明は、上記処理の少なくとも一部を実行する車両通信システムとして捉えることもできる。上記処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【0021】
例えば、本発明の一態様としての車両通信システムは、複数の車載端末と少なくとも1つの路側機とから構成され、これらのノードが1つの無線伝送路を利用して多重化通信を行う車両通信システムであって、車載端末は、自車両に関する情報を取得する情報取得手段と、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する危険度算出手段と、算出された危険度を路側機に通知する危険度通知手段と、を有し、路側機は、危険度の高い車載端末から優先的に通信資源を割り当てる通信資源割り当て手段を有する、ことを特徴とする。
【0022】
ここで、車載端末は、前記情報取得手段によって取得された自車両に関する情報を、他の車載端末に通知する情報通知手段をさらに有し、前記危険度算出手段は、自車両に関する情報に加えて、通知された他車両に関する情報にも基づいて、危険度を算出する、ことが好適である。
【発明の効果】
【0023】
本発明によれば、危険度の高い車載端末に優先的に通信資源を割り当てることができるので、車載端末の数が増えた場合であっても安全を保つことが可能となる。
【発明を実施するための最良の形態】
【0024】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0025】
(第1の実施形態)
[概要]
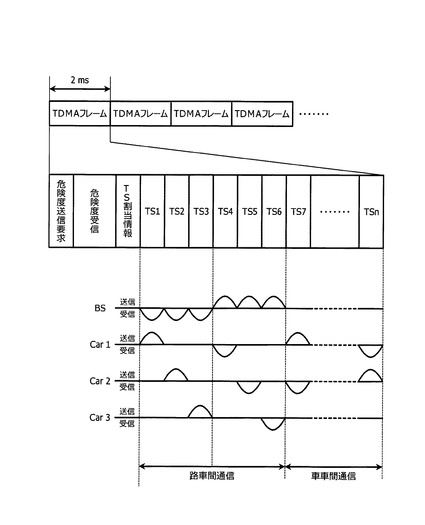
本実施形態における通信方式の概要について説明する。本実施形態は、無線アクセス方式としてTDMA−TDD(Time Division Multiple Access - Time Division Duplex)を採用している。そして、路側機がアクセス制御を集中制御する。図1に、本実施形態で利用するフレーム構成を示す。TDMAフレームは複数のタイムスロットに分割され、それぞれが各ノードに割り当てられる。図1に示すフレーム構成では、2ms間隔のTDMAフレームの中に、路車間通信の上り通信期間、下り通信期間、及び車車間通信期間を設け、それぞれのタイムスロットを各ノードに割り当てている。タイムスロットの割当ては、路側機がTDMAフレーム毎に動的に行う。
【0026】
なお、路車間通信の上り期間、下り期間、及び車車間通信期間の長さのそれぞれは固定ではなく、路車間通信に必要なタイムスロットの割当てが行われた後、残りのタイムスロットを車車間通信に割り当てる。したがって、各期間の長さはTDMAフレーム毎に動的
に変わりうる。ここで、車両の数が多いと車車間通信用のタイムスロットが足りなくなる場合があるが、危険度(後述)の高い車両から優先的にタイムスロットを割り当てることで、緊急に通信する必要のある車両に優先的にタイムスロットが割り当てられるようにしている。
【0027】
[構成]
〈システム全体〉
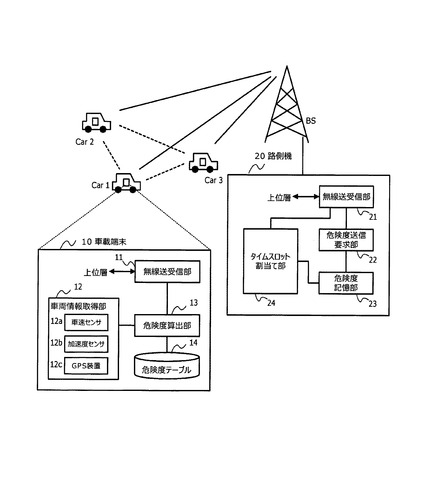
図2は、本実施形態に係る車両通信システムのシステム構成を示す図である。図に示すように本車両通信システムは、複数の車両に搭載された車載端末と路側機とから構成される。
【0028】
各車両は、路側機との間で通信を行って、渋滞や事故等の交通情報の提供を受けたり、他車や障害物と衝突する危険があるなどの危険情報の提供を受けたり、音楽や動画などのコンテンツ提供を受けたり、インターネットへの接続の提供を受けたりする。この路車間通信は、路車間で双方向に情報のやりとりを行う形態であっても良く、路側機から車両方向のみに情報が送られる形態(情報シャワー)であっても良い。
【0029】
また、各車両は車両間で車車間通信を行う。車車間通信では、例えば、車両間隔が近づきすぎたときに相手車両に警告を発したり、これから車線変更を行う場合に周囲の車両に注意を促したりする。また、前方に障害物があることを後続車両に対して通知したり、自車が急ブレーキを行った場合に後続車両に警告を行ったりする。それ以外にも、車両間で音声通信や、音楽や動画の交換といった通信を行う場合もある。音楽等の交換に関する通信はできなくても安全上の問題は起きないが、衝突の警告などが通信できないと安全上の問題が生じてしまう。
【0030】
〈車載端末〉
次に、車両に搭載される車載端末10の機能構成について説明する。
【0031】
車載端末10は、無線送受信部11、車両情報取得部12、危険度算出部13及び危険度テーブル14を有する。無線送受信部11は、路側機からのタイムスロットの割当てにしたがって、無線通信(送受信)を行う。
【0032】
無線送受信部11は、車両情報取得部12が取得する自車に関する情報や自車の危険度を、路側機や他の車両に対して送信する。また、無線送受信部11は、周辺の車両が送信している、その車両に関する情報を受信する。
【0033】
車両情報取得部12は、自車に関する情報を取得する。ここでは、自車の挙動に関する情報を主に取得している。すなわち、車速センサ12aによって自車の車速を取得し、加速度センサ12bによって自車の加速度を取得している。GPS装置12cは自車両の現在位置を取得する。
【0034】
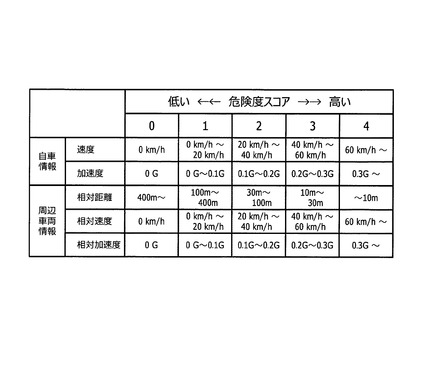
危険度算出部13は、自車両に関する情報及び周囲の車両に関する情報と、危険度テーブル14に基づいて、自車の危険の程度を表す危険度を算出する。本実施形態では、自車両の速度及び加速度、周辺車両との距離、周辺車両との相対速度及び相対加速度に基づいて、危険度を算出する。具体的には、危険度テーブル14が、上記の各情報に対応する危険度スコアを記憶している。危険度テーブル14の例を図3に示す。図3の例では、例えば、自車の速度が10km/hであれば、それに対応する危険度スコアは「1」である。なお、図3の危険度テーブルでは、速度及び加速度は絶対値が利用される。危険度算出部13は、自車の速度、自車の加速度、周辺車両との距離、周辺車両との相対速度及び周辺車両との相対加速度の5つの項目それぞれについて、危険度テーブル14を参照して危険
度スコアを抽出する。そして、危険度取得部13は、抽出した5つの危険度スコアを合計することで、自車両の危険度とする。この算出方法によると、危険度の最大値(最も危険)は「20」となり、最小値(最も安全)は「0」となる。
【0035】
なお、上記では危険度を、個々の情報から得られる危険度スコアの和(単純和)として求めているが、各危険度スコアに重み付けをした和(重み付け和)として求めても良い。ここで、重み付け係数は固定値であっても構わないし、状況に応じて重み付け係数を変えても良い。例えば、ある情報の内容に基づいて、他の情報に関する危険度スコアの重み付け係数を変えることが考えられる。具体的には、自車の速度が大きいときには他車両との相対距離についての危険度スコアに対する重み付けを大きくする一方、自車の速度が小さいときには他車両との相対距離についての危険度スコアに対する重み付けを小さくすることなどが考えられる。
【0036】
なお、本実施形態では、危険度の算出は、定期的に行う。そして、路側機20から危険度送信要求があった場合に、算出された危険度を無線送受信部11が路側機20に送信する。また、路側機20から危険度送信要求がない場合であっても、算出された危険度が閾値以上であれば、無線送受信部11を介して路側機20に送信する。
【0037】
〈路側機〉
次に、路側機20の機能構成について説明する。
【0038】
路側機20は、無線送受信部21、危険度送信要求部22、危険度記憶部23及びタイムスロット割当て部24を有する。無線送受信部21は、車両と無線通信を行う。
【0039】
危険度送信要求部22は、定期的に周囲の車両に対して危険度を送信するように要求する。車両から応答として送信された危険度は、危険度記憶部23に記憶される。タイムスロット割当て部24は、TDMAフレーム毎に動的にタイムスロットの割当てを行う。本実施形態では、路車間通信を最優先に扱い、路車間通信を行ってもタイムスロットに余裕があれば危険度の高い車両から優先的に、車車間通信用にタイムスロットを割り当てる。タイムスロット割当て部24の詳しい処理内容については、以下で説明する。
【0040】
[処理フロー]
〈車載端末〉
次に、車載端末10が行う処理について、図4のフローチャートを参照して説明する。
【0041】
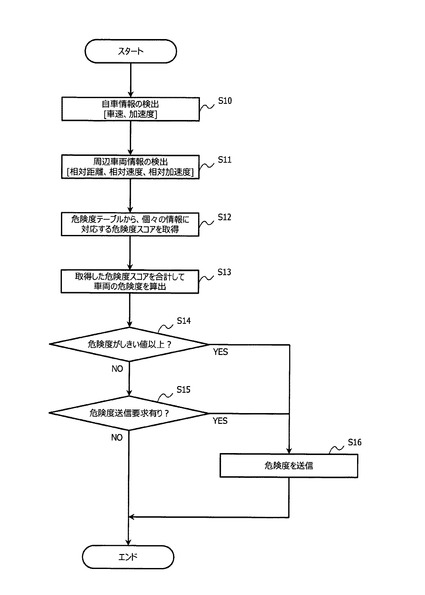
車載端末10は、車両情報取得部12を介して、自車両に関する情報を検出する(S10)。ここでは、速度センサ12aから自車の速度、加速度センサ12bから自車の加速度、及びGPS装置12cから自車両の位置情報を取得する。また、周辺の車両に関する情報を検出する(S11)。ここで周辺車両に関する情報は、自車両がミリ波レーダーやカメラなどによって取得しても良く、他車両から無線通信により通知されても良い。通知の場合は、例えば、車両から他の全車両宛てに自車両情報を送信しても良いし、路側機にデータを送信する際に自車両情報を一緒に格納し周囲の車両はこのデータを受信することで通知を行っても良い。そして、周辺車両の速度、加速度及び位置と、自車両の速度、加速度及び位置とから、周辺車両との相対速度、相対加速度及び相対距離を取得する。
【0042】
次に、危険度算出部13は、自車両の速度及び加速度、並びに周辺車両との相対距離、相対速度及び相対加速度のそれぞれの情報について、危険度テーブル14を参照して危険度スコアを抽出する(S12)。そして、取得した個々の危険度スコアを合計して、車両の危険度として算出する(S13)。例えば、図3に示す危険度テーブルを用いる場合、自車速度:80km/h,自車加速度:0.15G,相対距離:20m,相対速度10k
m/h,相対加速度:0.12Gであれば、それぞれに対応する危険度スコアが4,2,3,1,1となり、自車の危険度はその合計の11となる。
【0043】
次に、算出された危険度が所定のしきい値以上であるか否か判定する(S14)。しきい値の値は適宜設定可能であるが、例えば、上記のように危険度の最大値が20である場合には、しきい値を15程度としてもよい。ここで、危険度が所定のしきい値以上である場合(S14−YES)は、ステップS16へ進み危険度を路側機20に対して送信する。
【0044】
危険度がしきい値未満である場合(S14−NO)は、路側機20から危険度送信の要求を受信しているか否か判定する(S15)。危険度の送信が要求されている場合(S15−YES)には、ステップS16へ進み路側機20に対して危険度を送信する。一方、危険度の送信が要求されていない場合(S15−NO)には、処理を終了する。
【0045】
車載端末によるこのような処理によって、路側機20は各車両の危険度を定期的に取得し把握することができる。そして、車両の危険度が所定のしきい値以上である場合には、新たな危険度が迅速に路側機20に通知されることになる。
【0046】
〈路側機〉
まず、路側機20が行う処理について、図5のフローチャートを参照して説明する。
【0047】
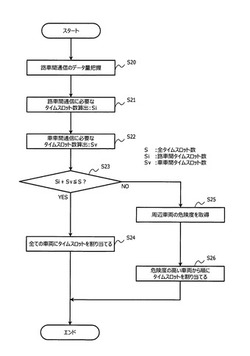
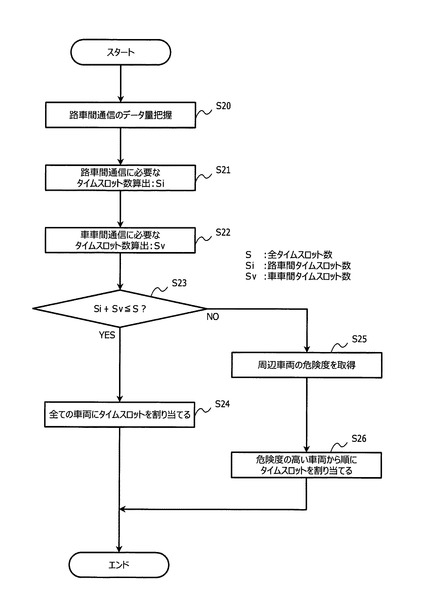
路側機20は、まず、路車間通信で使用されるデータ量を把握する(S20)。路側機20は、通信エリア内に何台の車両がいるか把握することができ、1台あたりのデータ量に通信車両台数をかけることで全体のデータ量を把握することができる。ここでは、図1に示すように、路側機20が3台の車両と、それぞれ1対1の通信を行う例を考える。
【0048】
次に、路側機20は、路車間通信に必要なタイムスロット数Siを算出する(S21)。路側機20が3台の車両とそれぞれ1対1の双方向通信を行う場合、車両3台の上りと下りのタイムスロットを割り当てるので、合計6つのタイムスロットが必要となる。
【0049】
次に、路側機20は、車車間通信に必要なタイムスロットSvを算出する(S22)。これは、通信要求(割当て要求)のあった車両の数から算出しても良いし、全ての車両が周囲の車両にブロードキャストを行うのみの方式であれば周囲の車両の数から算出しても良い。
【0050】
なお、タイムスロットの割当ては、一つのノードに対して一つのタイムスロットのみを割り当てる必要はなく、必要に応じて複数のタイムスロットを割り当てても良い。複数のタイムスロットが割り当てられることで、そのノードは高速に通信を行うことができる。
【0051】
次に、路側機20は、路車間通信に必要なタイムスロット数と車車間通信に必要なタイムスロット数の合計が、全タイムスロット数以内であるかを判定する(S23)。必要なタイムスロット数が全タイムスロット数以内であれば(S23−YES)、路車間通信用にタイムスロットを割り当てた後でも、タイムスロット割当て部24は、全ての車両に対して車車間通信用にタイムスロットを割り当てることができる(S24)。一方、必要なタイムスロット数が全タイムスロット数よりも多ければ(S23−NO)、一部の車両に対してはタイムスロットの割当てが行えない。そこで、路側機20は、周辺の車両の危険度を取得する(S25)。これは、路側機20が危険度情報送信要求を送信し、その応答として取得しても良い。あるいは、すでに取得した危険度を危険度記憶部23から取得しても良い。そして、タイムスロット割当て部24は、まず路車間通信用にタイムスロットを割り当てた後、危険度の高い車両から優先的に車車間通信用のタイムスロットを割り当
てる(S26)。
【0052】
[実施形態の作用/効果]
このようにすれば、路車間通信と車車間通信で1つの無線伝送路を利用して多重化通信を行い、TDMAフレームにおけるタイムスロットをダイナミックに割り当てることで、効率的な通信を行うことができる。
【0053】
また、車両の数が増えると、タイムスロットの割り当てられない車両が生じてしまうが、危険度に応じて優先的にタイムスロットを割り当てているので、衝突警告など安全に関わる通信を行おうとする車両に対しては優先的にタイムスロットが割り当てられ、安全上の問題が生じにくい。
【0054】
また、危険度の算出は個々の車両が行う分散処理となっているので、路側機に処理が集中してしまうことがない。また、各車両における危険度の算出は、車両に関する情報のそれぞれに対応する危険度スコアを危険度テーブルから抽出し、それらを合計するという単純な処理であるため、高速に実行することが可能である。
【0055】
本実施形態では、危険度の算出を自車両の速度・加速度及び周辺車両との相対距離・相対速度・相対加速度に基づいて算出しているが、危険度の算出はその他の情報に基づいて行われても良い。
【0056】
速度や加速度などの情報は、車両の挙動に関する情報、すなわち、運転者による運転操作の結果として車両がどのような振る舞いを示すかという情報をセンサによって取得したものということができる。なお、車両の挙動に関する情報としては、速度や加速度以外にも、ヨーレート、エアバックの作動状況に関する情報、ABS(Antilock Brake System
)の作動状況に関する情報などを挙げることができる。
【0057】
(第2の実施形態)
第2の実施形態では、車両の挙動に関する情報以外に基づいて、危険度の算出を行う。
【0058】
図6は、本実施形態における車載端末の機能構成の一例を示す図である。図6に示す車載端末によれば、車両情報取得部12は、運転者による車両の操作に関する情報を自車に関する情報として取得する。具体的には、操舵センサ12dによってハンドルがどの程度切られているか、アクセル開度センサ12eやブレーキ踏力センサ12fによってアクセルやブレーキがどの程度踏み込まれているかを検知する。ハンドルが切られている場合はハンドルが切られていない場合よりも危険であるし、アクセルやブレーキの踏み込みが大きいほど危険である。また、現在の値だけに着目せず、作動の履歴に基づいてハンドルやアクセルやブレーキの操作の振れ幅が大きいときはより危険と判断しても良い。また、図示した以外の、車両の操作に関する情報として、ウィンカー(方向指示器)の作動状況や、クラクションの作動状況などを挙げることができる。ウィンカーの作動は、進路変更(右左折)や車線変更を意味し危険度が大きくなるし、クラクションは運転者が危険を認識した場合に用いられるので作動時には危険が大きいと判断できる。
【0059】
図7は、本実施形態における車載端末の機能構成の別の例を示す図である。図7に示す車載端末によれば、車両情報取得部12は、運転者の状態に関する情報を自車に関する情報として取得する。具体的には、心拍数計測装置12gによって運転者の心拍数を取得したり、発汗測定装置12hによって運転者の発汗量を測定したり、居眠り検知装置12iによって運転者の眠気の状態を取得したりする。心拍数計測装置12gは、例えば、ハンドルの握り部分に設置しておく。運転者の心拍数が急に大きくなったときは危険な状態であると判断できる。発汗測定装置12hも、ハンドルの握り部分に設置しておく。運転者
の発汗量が大きくなった場合は危険な状態であると判断できる。居眠り検知装置12iは、ハンドルやダッシュボードなどに設けられたカメラで運転者の表情を撮影し、その表情(瞼の開き具合、視線の挙動、瞬きの回数等)を画像解析することで、運転者の眠気の度合いを判定する。運転者が眠い状態にあるときは危険な状態であると判断できる。また、図示した以外の、運転者の状態に関する情報として、血圧や脳波や運転者の発声や視線などを挙げることができる。血圧や脳波は運転者の生体情報であり、危険を察知したか否かをその波形から判断することができる。また、音声情報は、発声の内容を音声認識で判断したり、音声の波形を解析して運転者の心理状態(イライラしているなど)を判断することができる。また、運転者の視線を検知することで、脇見運転を検知できる。
【0060】
このように、車両に関する情報は大別して、車両の挙動に関する情報、車両の操作に関する情報、運転者の状態に関する情報の3つが挙げられる。上記の説明では、これら3種類の情報を個別に利用する例のみを用いているが、これらを複合して用いても良いことは容易に理解できる。
【0061】
このように種々の情報を用いて車両の危険度を算出することで、より精度良く危険度を判定することができる。
【0062】
(第3の実施形態)
第1の実施形態では、路車間通信には常にタイムスロットを割当て、路車間通信にタイムスロットを割り当てた後に余裕のある場合に、車車間通信にもタイムスロットを割り当てている。しかしながら、路車間通信と車車間通信の両方について、危険度の高い車両から優先的に割当てを行っても良い。
【0063】
すなわち、図5に示すフローチャートのステップS16において、路側機20のタイムスロット割当て部24が、危険度の高い車両から順番に、タイムスロットを路車間通信と車車間通信用に割り当てていく。このようにすれば、危険度の高い車両からの緊急の通信を優先的に行うことができ、安全性を向上することができる。
【0064】
(第4の実施形態)
第1の実施形態では、通信の方法として、図1に示すように路側機20と各車載端末10が1対1で通信を行い、車載端末10同士は直接通信を行う例を挙げて説明をしている。しかしながら、通信の方法は、上記に限られず、種々の方法を採用することができる。
【0065】
例えば、路車間通信では路側機20から車載端末10へ一方向の通信が行われても良い。これは、路側機20が、交通情報などを車載端末10へ配信する形態を例として挙げることができる。また、車載端末10同士の通信を、路側機20を中継して行う方式(車路車間通信)とすることもできる。このように通信の形態は種々の方式が考えられるが、どのような方式を採用しても良い。
【0066】
(第5の実施形態)
第1の実施形態では、多重化通信の方法として、時分割多元接続方式(TDMA)を例に挙げて説明している。しかしながら、多重化通信の方法は、TDMAに限られない。
【0067】
時間方向に分割するTDMA(図8参照)以外にも、1つの無線チャネルを複数の周波数チャネル(周波数スロット)に周波数分割多元接続(FDMA、図9参照)を採用しても良い。FDMA方式を採用する場合は、路側機20は通信資源として、タイムスロットではなく周波数スロットを車載端末10に対して割り当てる。
【0068】
また、拡散符号を用いて多重化を行う符号分割多元接続(CDMA、図10参照)を採
用しても良い。CDMA方式を採用する場合は、路側機20は通信資源として、タイムスロットではなく拡散符号を車載端末10に対して割り当てる。
【0069】
また、TDMA,FDMA,CDMAはそれぞれ組み合わせて用いても構わない。例えば、図11に示すようにFDMA方式によって周波数帯域を分割して複数の周波数スロットを用い、各周波数スロットに対してTDMA方式によってタイムスロットに分割する。図11の例では、1つのフレームが、5つの周波数スロット及び7つのタイムスロットに分割されて、全体として35個のチャネルに分割される。この個々のチャネルを路側機20が車載端末10に対して割り当てる。
【図面の簡単な説明】
【0070】
【図1】第1の実施形態で使用されるTDMAフレームの構成例を示す図である。
【図2】第1の実施形態における車両通信システムのシステム構成及び、車載端末・路側機の機能構成を示す図である。
【図3】第1の実施形態における危険度テーブルの例を示す図である。
【図4】第1の実施形態において車載端末が行う処理の流れを示すフローチャートである。
【図5】第1の実施形態において路側機が行う処理の流れを示すフローチャートである。
【図6】第2の実施形態における車載端末の機能構成の例を示す図である。
【図7】第2の実施形態における車載端末の機能構成の例を示す図である。
【図8】時分割多元接続方式(TDMA)を説明する図である。
【図9】周波数分割多元接続方式(FDMA)を説明する図である。
【図10】符号分割多元接続方式(CDMA)を説明する図である。
【図11】FDMA+TDMA方式を説明する図である。
【符号の説明】
【0071】
10 車載端末
11 無線送受信部
12 車両情報取得部
13 危険度算出部
14 危険度テーブル
20 路側機
21 無線送受信部
22 危険度送信要求部
23 危険度記憶部
24 タイムスロット割当て部
【技術分野】
【0001】
本発明は、車両通信システムにおける無線通信技術に関する。
【背景技術】
【0002】
安全性の向上、輸送効率の向上、快適性の向上などを目的として、情報通信技術を用いて道路と車両とを一体のシステムとした高度道路交通システム(ITS:Intelligent Transport System)の開発が進められている。ITSでは、路上に設置された路側機と車両に搭載された車載機との間の路車間通信、車載機同士の間の車車間通信によって、上記の目的を実現しようとしている。
【0003】
このように、車両に搭載される車載機は、路車間通信と車車間通信の両方を行う必要がある。ここで、路車間通信と車車間通信とで異なる無線通信方式を用いると、周波数資源利用効率が低下すると共に、車載機の複雑化やコストの上昇を招いてしまう。したがって、無線回路などの共用が可能なように、変調方式、周波数などを路車間通信と車車間通信とで同一とすることが好ましい。
【0004】
路車間通信と車車間通信を両立させるための通信方式として、路車間通信と車車間通信を時間的に分割する方式が提案されている(例えば、特許文献1)。このような方式では、路車間通信と車車間通信に割り当てる時間の割合を固定にしたり、リクエストがあったノードに割り振ったりしているが、ノード数が増えるとオーバーフローしてしまう。路車間通信や車車間通信では安全に関わる情報が交換されているため、緊急度の高い通信が送信できない場合には、事故等を引き起こしてしまう可能性がある。
【0005】
また、車車間通信における周波数チャネルの割当て方法として、交差点に進入する車両の画像を撮影し、画像に基づいて衝突の危険度を予測し、危険度の高い車両に優先的に周波数チャネルを割り当てる方法が提案されている(特許文献2)。この方法によれば、危険度の高い車両に優先して周波数チャネルが割り当てられるため、車両の数が増えた場合であっても、安全性を向上することができる。
【特許文献1】特開2000−165313号公報
【特許文献2】特開2005−32010号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
本発明は、路車間通信と車車間通信を共用する無線通信方式において、危険度の高い車載端末に優先的に通信資源を割当てることで、車載端末の数が増えた場合であっても安全を保つことを目的とする。
【課題を解決するための手段】
【0007】
本発明は、複数の車載端末と少なくとも1つの路側機とから構成され、これらのノードが1つの無線伝送路を利用して多重化通信を行う車両通信システムにおける無線通信方法である。1つの無線伝送路を利用した多重化通信としては、時分割多元接続、周波数分割多元接続、符号分割多元接続などの方式を採用可能である。
【0008】
本発明に係る無線通信方法は、上記目的を達成するために、車載端末が自車両に関する情報を取得する工程と、車載端末が、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する工程と、車載端末が、算出された危険度を前記路側機に通知する工程と、路側機が、危険度の高い車両の車載端末から優先的に通信資源を割り
当てる工程と、を含む。
【0009】
このように、危険度の高い車両に対して優先的に通信資源を割り当てることで、車両の数が増えてしまい、通信を行えない車両が生じてしまった場合であっても、緊急度の高い通信を行う車両に対しては確実に通信資源の割当てを行える。したがって、車両の数が増えた場合であっても、安全を保つことができる。
【0010】
本発明では、危険度の算出処理を各車両で行っており、算出処理が分散される。したがって、路側機などの1つの装置で集中して危険度の算出を行う場合に比較して、処理の効率化がなされるという利点もある。
【0011】
ここで、本発明は、車載端末が、取得した自車両に関する情報を他の車載端末に通知する工程をさらに含み、危険度を算出する工程では、自車両に関する情報に加えて、通知された他車両に関する情報にも基づいて危険度が算出されることが好適である。
【0012】
このように、自車両に関する情報だけでなく、他車両に関する情報も用いて、自車両の危険の程度をより正確に算出することができる。
【0013】
なお、車両に関する情報には、車両の挙動に関する情報や、車両の操作に関する情報や、車両の運転者の状態に関する情報が含まれる。
【0014】
車両の挙動に関する情報は、運転者による操作やその他の外部要因(路面状態や風など)の結果として、車両がどのような挙動を示すかを表す情報である。この情報は、車両の挙動をセンサによって測定することによって得ることができる。車両の挙動に関する情報の典型的な例として、車両の速度や加速度を挙げることができる。
【0015】
車両の操作に関する情報は、運転者が車両に対してどのような操作を行ったかを表す情報である。この情報は、ハンドルやペダル等のユーザとのインタフェースの動作状況を取得することによって得ることができる。車両の操作に関する情報の例としては、ハンドル、アクセル、ブレーキ、ウィンカー、クラクションなどの操作状況に関する情報を挙げることができる。
【0016】
車両の運転者の状態に関する情報は、運転者の生理・生体情報を含む。この情報は、運転者の生理情報を測定したり、運転者の画像を撮影し解析したり、運転者の発する声を音声認識したりすることにより得ることができる。車両の運転者の状態に関する情報の例としては、運転者の心拍数、血圧、発汗の状態、脳波や、運転者の表情や発声を挙げることができる。
【0017】
本発明において、危険度は以下のようにして算出することが好適である。すなわち、車両に関する情報が複数の情報から構成されており、その各々について情報の内容に基づいて危険を表すスコアを算出し、算出した複数のスコアの合計として危険度を求めることが好適である。なお、車両に関する情報の各々について、その情報の内容と危険を表すスコアの関係をテーブルとしてあらかじめ保持しておき、このテーブルを参照してスコアを求める構成を採用することができる。また、危険度を複数のスコアの合計として求めているが、複数のスコアの平均も実質的に複数のスコアの合計を求めていることと同等である。また、複数のスコアの合計は単純な合計(単純和)であっても良く、重み付けをした合計(重み付け和)であっても構わない。
【0018】
このように、車両に関する情報を複数利用する場合であっても、それぞれについてスコアを算出しその和を求めるだけであれば、処理の負荷はそれほどかからない。したがって
、車両側で危険度を算出する場合にも、高速に危険度の算出を行える。
【0019】
本発明において、車両あるいは路側機に割り当てる通信資源には、以下のものが含まれる。多重化通信の方式が時分割多元接続方式である場合には、通信資源はタイムスロットとなる。多重化通信の方式が周波数分割多元接続方式である場合には、通信資源は周波数チャネル(周波数スロット)である。多重化通信の方式が符号分割多元接続方式である場合には、通信資源は拡散符号である。なお、通信資源(タイムスロット、周波数チャネル、拡散符号等)は、1つの車両に対して複数割り当てられても良い。複数のタイムスロット等が割り当てられた車両は、より高速に通信することが可能となる。したがって、危険度が高い車両に対しては複数のタイムスロット等を割り当てることも好適である。
【0020】
なお、本発明は、上記処理の少なくとも一部を含む無線通信方法として捉えることができる。また、本発明は、上記処理の少なくとも一部を実行する車両通信システムとして捉えることもできる。上記処理の各々は可能な限り互いに組み合わせて本発明を構成することができる。
【0021】
例えば、本発明の一態様としての車両通信システムは、複数の車載端末と少なくとも1つの路側機とから構成され、これらのノードが1つの無線伝送路を利用して多重化通信を行う車両通信システムであって、車載端末は、自車両に関する情報を取得する情報取得手段と、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する危険度算出手段と、算出された危険度を路側機に通知する危険度通知手段と、を有し、路側機は、危険度の高い車載端末から優先的に通信資源を割り当てる通信資源割り当て手段を有する、ことを特徴とする。
【0022】
ここで、車載端末は、前記情報取得手段によって取得された自車両に関する情報を、他の車載端末に通知する情報通知手段をさらに有し、前記危険度算出手段は、自車両に関する情報に加えて、通知された他車両に関する情報にも基づいて、危険度を算出する、ことが好適である。
【発明の効果】
【0023】
本発明によれば、危険度の高い車載端末に優先的に通信資源を割り当てることができるので、車載端末の数が増えた場合であっても安全を保つことが可能となる。
【発明を実施するための最良の形態】
【0024】
以下に図面を参照して、この発明の好適な実施の形態を例示的に詳しく説明する。
【0025】
(第1の実施形態)
[概要]
本実施形態における通信方式の概要について説明する。本実施形態は、無線アクセス方式としてTDMA−TDD(Time Division Multiple Access - Time Division Duplex)を採用している。そして、路側機がアクセス制御を集中制御する。図1に、本実施形態で利用するフレーム構成を示す。TDMAフレームは複数のタイムスロットに分割され、それぞれが各ノードに割り当てられる。図1に示すフレーム構成では、2ms間隔のTDMAフレームの中に、路車間通信の上り通信期間、下り通信期間、及び車車間通信期間を設け、それぞれのタイムスロットを各ノードに割り当てている。タイムスロットの割当ては、路側機がTDMAフレーム毎に動的に行う。
【0026】
なお、路車間通信の上り期間、下り期間、及び車車間通信期間の長さのそれぞれは固定ではなく、路車間通信に必要なタイムスロットの割当てが行われた後、残りのタイムスロットを車車間通信に割り当てる。したがって、各期間の長さはTDMAフレーム毎に動的
に変わりうる。ここで、車両の数が多いと車車間通信用のタイムスロットが足りなくなる場合があるが、危険度(後述)の高い車両から優先的にタイムスロットを割り当てることで、緊急に通信する必要のある車両に優先的にタイムスロットが割り当てられるようにしている。
【0027】
[構成]
〈システム全体〉
図2は、本実施形態に係る車両通信システムのシステム構成を示す図である。図に示すように本車両通信システムは、複数の車両に搭載された車載端末と路側機とから構成される。
【0028】
各車両は、路側機との間で通信を行って、渋滞や事故等の交通情報の提供を受けたり、他車や障害物と衝突する危険があるなどの危険情報の提供を受けたり、音楽や動画などのコンテンツ提供を受けたり、インターネットへの接続の提供を受けたりする。この路車間通信は、路車間で双方向に情報のやりとりを行う形態であっても良く、路側機から車両方向のみに情報が送られる形態(情報シャワー)であっても良い。
【0029】
また、各車両は車両間で車車間通信を行う。車車間通信では、例えば、車両間隔が近づきすぎたときに相手車両に警告を発したり、これから車線変更を行う場合に周囲の車両に注意を促したりする。また、前方に障害物があることを後続車両に対して通知したり、自車が急ブレーキを行った場合に後続車両に警告を行ったりする。それ以外にも、車両間で音声通信や、音楽や動画の交換といった通信を行う場合もある。音楽等の交換に関する通信はできなくても安全上の問題は起きないが、衝突の警告などが通信できないと安全上の問題が生じてしまう。
【0030】
〈車載端末〉
次に、車両に搭載される車載端末10の機能構成について説明する。
【0031】
車載端末10は、無線送受信部11、車両情報取得部12、危険度算出部13及び危険度テーブル14を有する。無線送受信部11は、路側機からのタイムスロットの割当てにしたがって、無線通信(送受信)を行う。
【0032】
無線送受信部11は、車両情報取得部12が取得する自車に関する情報や自車の危険度を、路側機や他の車両に対して送信する。また、無線送受信部11は、周辺の車両が送信している、その車両に関する情報を受信する。
【0033】
車両情報取得部12は、自車に関する情報を取得する。ここでは、自車の挙動に関する情報を主に取得している。すなわち、車速センサ12aによって自車の車速を取得し、加速度センサ12bによって自車の加速度を取得している。GPS装置12cは自車両の現在位置を取得する。
【0034】
危険度算出部13は、自車両に関する情報及び周囲の車両に関する情報と、危険度テーブル14に基づいて、自車の危険の程度を表す危険度を算出する。本実施形態では、自車両の速度及び加速度、周辺車両との距離、周辺車両との相対速度及び相対加速度に基づいて、危険度を算出する。具体的には、危険度テーブル14が、上記の各情報に対応する危険度スコアを記憶している。危険度テーブル14の例を図3に示す。図3の例では、例えば、自車の速度が10km/hであれば、それに対応する危険度スコアは「1」である。なお、図3の危険度テーブルでは、速度及び加速度は絶対値が利用される。危険度算出部13は、自車の速度、自車の加速度、周辺車両との距離、周辺車両との相対速度及び周辺車両との相対加速度の5つの項目それぞれについて、危険度テーブル14を参照して危険
度スコアを抽出する。そして、危険度取得部13は、抽出した5つの危険度スコアを合計することで、自車両の危険度とする。この算出方法によると、危険度の最大値(最も危険)は「20」となり、最小値(最も安全)は「0」となる。
【0035】
なお、上記では危険度を、個々の情報から得られる危険度スコアの和(単純和)として求めているが、各危険度スコアに重み付けをした和(重み付け和)として求めても良い。ここで、重み付け係数は固定値であっても構わないし、状況に応じて重み付け係数を変えても良い。例えば、ある情報の内容に基づいて、他の情報に関する危険度スコアの重み付け係数を変えることが考えられる。具体的には、自車の速度が大きいときには他車両との相対距離についての危険度スコアに対する重み付けを大きくする一方、自車の速度が小さいときには他車両との相対距離についての危険度スコアに対する重み付けを小さくすることなどが考えられる。
【0036】
なお、本実施形態では、危険度の算出は、定期的に行う。そして、路側機20から危険度送信要求があった場合に、算出された危険度を無線送受信部11が路側機20に送信する。また、路側機20から危険度送信要求がない場合であっても、算出された危険度が閾値以上であれば、無線送受信部11を介して路側機20に送信する。
【0037】
〈路側機〉
次に、路側機20の機能構成について説明する。
【0038】
路側機20は、無線送受信部21、危険度送信要求部22、危険度記憶部23及びタイムスロット割当て部24を有する。無線送受信部21は、車両と無線通信を行う。
【0039】
危険度送信要求部22は、定期的に周囲の車両に対して危険度を送信するように要求する。車両から応答として送信された危険度は、危険度記憶部23に記憶される。タイムスロット割当て部24は、TDMAフレーム毎に動的にタイムスロットの割当てを行う。本実施形態では、路車間通信を最優先に扱い、路車間通信を行ってもタイムスロットに余裕があれば危険度の高い車両から優先的に、車車間通信用にタイムスロットを割り当てる。タイムスロット割当て部24の詳しい処理内容については、以下で説明する。
【0040】
[処理フロー]
〈車載端末〉
次に、車載端末10が行う処理について、図4のフローチャートを参照して説明する。
【0041】
車載端末10は、車両情報取得部12を介して、自車両に関する情報を検出する(S10)。ここでは、速度センサ12aから自車の速度、加速度センサ12bから自車の加速度、及びGPS装置12cから自車両の位置情報を取得する。また、周辺の車両に関する情報を検出する(S11)。ここで周辺車両に関する情報は、自車両がミリ波レーダーやカメラなどによって取得しても良く、他車両から無線通信により通知されても良い。通知の場合は、例えば、車両から他の全車両宛てに自車両情報を送信しても良いし、路側機にデータを送信する際に自車両情報を一緒に格納し周囲の車両はこのデータを受信することで通知を行っても良い。そして、周辺車両の速度、加速度及び位置と、自車両の速度、加速度及び位置とから、周辺車両との相対速度、相対加速度及び相対距離を取得する。
【0042】
次に、危険度算出部13は、自車両の速度及び加速度、並びに周辺車両との相対距離、相対速度及び相対加速度のそれぞれの情報について、危険度テーブル14を参照して危険度スコアを抽出する(S12)。そして、取得した個々の危険度スコアを合計して、車両の危険度として算出する(S13)。例えば、図3に示す危険度テーブルを用いる場合、自車速度:80km/h,自車加速度:0.15G,相対距離:20m,相対速度10k
m/h,相対加速度:0.12Gであれば、それぞれに対応する危険度スコアが4,2,3,1,1となり、自車の危険度はその合計の11となる。
【0043】
次に、算出された危険度が所定のしきい値以上であるか否か判定する(S14)。しきい値の値は適宜設定可能であるが、例えば、上記のように危険度の最大値が20である場合には、しきい値を15程度としてもよい。ここで、危険度が所定のしきい値以上である場合(S14−YES)は、ステップS16へ進み危険度を路側機20に対して送信する。
【0044】
危険度がしきい値未満である場合(S14−NO)は、路側機20から危険度送信の要求を受信しているか否か判定する(S15)。危険度の送信が要求されている場合(S15−YES)には、ステップS16へ進み路側機20に対して危険度を送信する。一方、危険度の送信が要求されていない場合(S15−NO)には、処理を終了する。
【0045】
車載端末によるこのような処理によって、路側機20は各車両の危険度を定期的に取得し把握することができる。そして、車両の危険度が所定のしきい値以上である場合には、新たな危険度が迅速に路側機20に通知されることになる。
【0046】
〈路側機〉
まず、路側機20が行う処理について、図5のフローチャートを参照して説明する。
【0047】
路側機20は、まず、路車間通信で使用されるデータ量を把握する(S20)。路側機20は、通信エリア内に何台の車両がいるか把握することができ、1台あたりのデータ量に通信車両台数をかけることで全体のデータ量を把握することができる。ここでは、図1に示すように、路側機20が3台の車両と、それぞれ1対1の通信を行う例を考える。
【0048】
次に、路側機20は、路車間通信に必要なタイムスロット数Siを算出する(S21)。路側機20が3台の車両とそれぞれ1対1の双方向通信を行う場合、車両3台の上りと下りのタイムスロットを割り当てるので、合計6つのタイムスロットが必要となる。
【0049】
次に、路側機20は、車車間通信に必要なタイムスロットSvを算出する(S22)。これは、通信要求(割当て要求)のあった車両の数から算出しても良いし、全ての車両が周囲の車両にブロードキャストを行うのみの方式であれば周囲の車両の数から算出しても良い。
【0050】
なお、タイムスロットの割当ては、一つのノードに対して一つのタイムスロットのみを割り当てる必要はなく、必要に応じて複数のタイムスロットを割り当てても良い。複数のタイムスロットが割り当てられることで、そのノードは高速に通信を行うことができる。
【0051】
次に、路側機20は、路車間通信に必要なタイムスロット数と車車間通信に必要なタイムスロット数の合計が、全タイムスロット数以内であるかを判定する(S23)。必要なタイムスロット数が全タイムスロット数以内であれば(S23−YES)、路車間通信用にタイムスロットを割り当てた後でも、タイムスロット割当て部24は、全ての車両に対して車車間通信用にタイムスロットを割り当てることができる(S24)。一方、必要なタイムスロット数が全タイムスロット数よりも多ければ(S23−NO)、一部の車両に対してはタイムスロットの割当てが行えない。そこで、路側機20は、周辺の車両の危険度を取得する(S25)。これは、路側機20が危険度情報送信要求を送信し、その応答として取得しても良い。あるいは、すでに取得した危険度を危険度記憶部23から取得しても良い。そして、タイムスロット割当て部24は、まず路車間通信用にタイムスロットを割り当てた後、危険度の高い車両から優先的に車車間通信用のタイムスロットを割り当
てる(S26)。
【0052】
[実施形態の作用/効果]
このようにすれば、路車間通信と車車間通信で1つの無線伝送路を利用して多重化通信を行い、TDMAフレームにおけるタイムスロットをダイナミックに割り当てることで、効率的な通信を行うことができる。
【0053】
また、車両の数が増えると、タイムスロットの割り当てられない車両が生じてしまうが、危険度に応じて優先的にタイムスロットを割り当てているので、衝突警告など安全に関わる通信を行おうとする車両に対しては優先的にタイムスロットが割り当てられ、安全上の問題が生じにくい。
【0054】
また、危険度の算出は個々の車両が行う分散処理となっているので、路側機に処理が集中してしまうことがない。また、各車両における危険度の算出は、車両に関する情報のそれぞれに対応する危険度スコアを危険度テーブルから抽出し、それらを合計するという単純な処理であるため、高速に実行することが可能である。
【0055】
本実施形態では、危険度の算出を自車両の速度・加速度及び周辺車両との相対距離・相対速度・相対加速度に基づいて算出しているが、危険度の算出はその他の情報に基づいて行われても良い。
【0056】
速度や加速度などの情報は、車両の挙動に関する情報、すなわち、運転者による運転操作の結果として車両がどのような振る舞いを示すかという情報をセンサによって取得したものということができる。なお、車両の挙動に関する情報としては、速度や加速度以外にも、ヨーレート、エアバックの作動状況に関する情報、ABS(Antilock Brake System
)の作動状況に関する情報などを挙げることができる。
【0057】
(第2の実施形態)
第2の実施形態では、車両の挙動に関する情報以外に基づいて、危険度の算出を行う。
【0058】
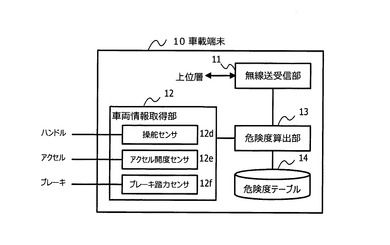
図6は、本実施形態における車載端末の機能構成の一例を示す図である。図6に示す車載端末によれば、車両情報取得部12は、運転者による車両の操作に関する情報を自車に関する情報として取得する。具体的には、操舵センサ12dによってハンドルがどの程度切られているか、アクセル開度センサ12eやブレーキ踏力センサ12fによってアクセルやブレーキがどの程度踏み込まれているかを検知する。ハンドルが切られている場合はハンドルが切られていない場合よりも危険であるし、アクセルやブレーキの踏み込みが大きいほど危険である。また、現在の値だけに着目せず、作動の履歴に基づいてハンドルやアクセルやブレーキの操作の振れ幅が大きいときはより危険と判断しても良い。また、図示した以外の、車両の操作に関する情報として、ウィンカー(方向指示器)の作動状況や、クラクションの作動状況などを挙げることができる。ウィンカーの作動は、進路変更(右左折)や車線変更を意味し危険度が大きくなるし、クラクションは運転者が危険を認識した場合に用いられるので作動時には危険が大きいと判断できる。
【0059】
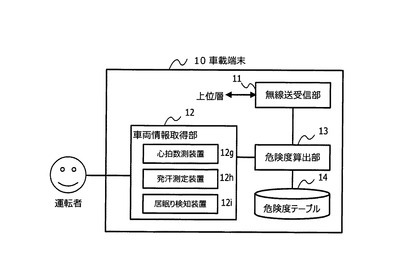
図7は、本実施形態における車載端末の機能構成の別の例を示す図である。図7に示す車載端末によれば、車両情報取得部12は、運転者の状態に関する情報を自車に関する情報として取得する。具体的には、心拍数計測装置12gによって運転者の心拍数を取得したり、発汗測定装置12hによって運転者の発汗量を測定したり、居眠り検知装置12iによって運転者の眠気の状態を取得したりする。心拍数計測装置12gは、例えば、ハンドルの握り部分に設置しておく。運転者の心拍数が急に大きくなったときは危険な状態であると判断できる。発汗測定装置12hも、ハンドルの握り部分に設置しておく。運転者
の発汗量が大きくなった場合は危険な状態であると判断できる。居眠り検知装置12iは、ハンドルやダッシュボードなどに設けられたカメラで運転者の表情を撮影し、その表情(瞼の開き具合、視線の挙動、瞬きの回数等)を画像解析することで、運転者の眠気の度合いを判定する。運転者が眠い状態にあるときは危険な状態であると判断できる。また、図示した以外の、運転者の状態に関する情報として、血圧や脳波や運転者の発声や視線などを挙げることができる。血圧や脳波は運転者の生体情報であり、危険を察知したか否かをその波形から判断することができる。また、音声情報は、発声の内容を音声認識で判断したり、音声の波形を解析して運転者の心理状態(イライラしているなど)を判断することができる。また、運転者の視線を検知することで、脇見運転を検知できる。
【0060】
このように、車両に関する情報は大別して、車両の挙動に関する情報、車両の操作に関する情報、運転者の状態に関する情報の3つが挙げられる。上記の説明では、これら3種類の情報を個別に利用する例のみを用いているが、これらを複合して用いても良いことは容易に理解できる。
【0061】
このように種々の情報を用いて車両の危険度を算出することで、より精度良く危険度を判定することができる。
【0062】
(第3の実施形態)
第1の実施形態では、路車間通信には常にタイムスロットを割当て、路車間通信にタイムスロットを割り当てた後に余裕のある場合に、車車間通信にもタイムスロットを割り当てている。しかしながら、路車間通信と車車間通信の両方について、危険度の高い車両から優先的に割当てを行っても良い。
【0063】
すなわち、図5に示すフローチャートのステップS16において、路側機20のタイムスロット割当て部24が、危険度の高い車両から順番に、タイムスロットを路車間通信と車車間通信用に割り当てていく。このようにすれば、危険度の高い車両からの緊急の通信を優先的に行うことができ、安全性を向上することができる。
【0064】
(第4の実施形態)
第1の実施形態では、通信の方法として、図1に示すように路側機20と各車載端末10が1対1で通信を行い、車載端末10同士は直接通信を行う例を挙げて説明をしている。しかしながら、通信の方法は、上記に限られず、種々の方法を採用することができる。
【0065】
例えば、路車間通信では路側機20から車載端末10へ一方向の通信が行われても良い。これは、路側機20が、交通情報などを車載端末10へ配信する形態を例として挙げることができる。また、車載端末10同士の通信を、路側機20を中継して行う方式(車路車間通信)とすることもできる。このように通信の形態は種々の方式が考えられるが、どのような方式を採用しても良い。
【0066】
(第5の実施形態)
第1の実施形態では、多重化通信の方法として、時分割多元接続方式(TDMA)を例に挙げて説明している。しかしながら、多重化通信の方法は、TDMAに限られない。
【0067】
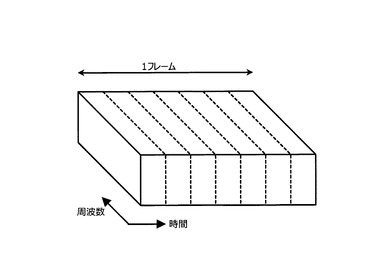
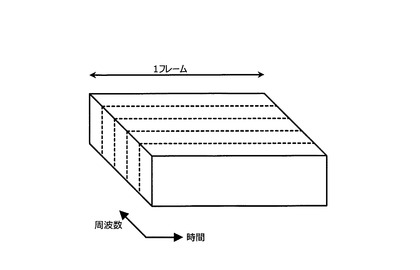
時間方向に分割するTDMA(図8参照)以外にも、1つの無線チャネルを複数の周波数チャネル(周波数スロット)に周波数分割多元接続(FDMA、図9参照)を採用しても良い。FDMA方式を採用する場合は、路側機20は通信資源として、タイムスロットではなく周波数スロットを車載端末10に対して割り当てる。
【0068】
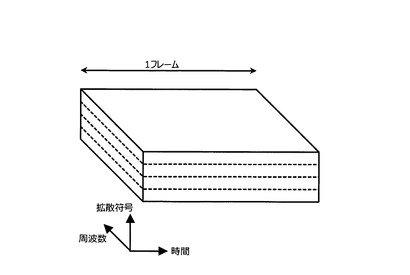
また、拡散符号を用いて多重化を行う符号分割多元接続(CDMA、図10参照)を採
用しても良い。CDMA方式を採用する場合は、路側機20は通信資源として、タイムスロットではなく拡散符号を車載端末10に対して割り当てる。
【0069】
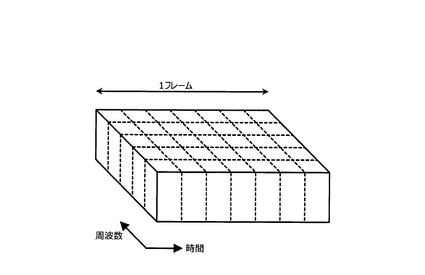
また、TDMA,FDMA,CDMAはそれぞれ組み合わせて用いても構わない。例えば、図11に示すようにFDMA方式によって周波数帯域を分割して複数の周波数スロットを用い、各周波数スロットに対してTDMA方式によってタイムスロットに分割する。図11の例では、1つのフレームが、5つの周波数スロット及び7つのタイムスロットに分割されて、全体として35個のチャネルに分割される。この個々のチャネルを路側機20が車載端末10に対して割り当てる。
【図面の簡単な説明】
【0070】
【図1】第1の実施形態で使用されるTDMAフレームの構成例を示す図である。
【図2】第1の実施形態における車両通信システムのシステム構成及び、車載端末・路側機の機能構成を示す図である。
【図3】第1の実施形態における危険度テーブルの例を示す図である。
【図4】第1の実施形態において車載端末が行う処理の流れを示すフローチャートである。
【図5】第1の実施形態において路側機が行う処理の流れを示すフローチャートである。
【図6】第2の実施形態における車載端末の機能構成の例を示す図である。
【図7】第2の実施形態における車載端末の機能構成の例を示す図である。
【図8】時分割多元接続方式(TDMA)を説明する図である。
【図9】周波数分割多元接続方式(FDMA)を説明する図である。
【図10】符号分割多元接続方式(CDMA)を説明する図である。
【図11】FDMA+TDMA方式を説明する図である。
【符号の説明】
【0071】
10 車載端末
11 無線送受信部
12 車両情報取得部
13 危険度算出部
14 危険度テーブル
20 路側機
21 無線送受信部
22 危険度送信要求部
23 危険度記憶部
24 タイムスロット割当て部
【特許請求の範囲】
【請求項1】
複数の車載端末と少なくとも1つの路側機とから構成され、これらのノードが1つの無線伝送路を利用して多重化通信を行う車両通信システムにおける無線通信方法であって、
車載端末が自車両に関する情報を取得する工程と、
車載端末が、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する工程と、
車載端末が、算出された危険度を前記路側機に通知する工程と、
路側機が、危険度の高い車両の車載端末から優先的に通信資源を割り当てる工程と、
を含むことを特徴とする無線通信方法。
【請求項2】
車載端末が、取得した自車両に関する情報を他の車載端末に通知する工程、をさらに含み、
前記危険度を算出する工程では、自車両に関する情報に加えて、通知された他車両に関する情報にも基づいて危険度が算出される、
ことを特徴とする請求項1に記載の無線通信方法。
【請求項3】
前記車両に関する情報は、当該車両の挙動に関する情報を含む、
ことを特徴とする請求項1又は2に記載の無線通信方法。
【請求項4】
前記車両に関する情報は、当該車両の操作に関する情報を含む、
ことを特徴とする請求項1〜3のいずれか1項に記載の無線通信方法。
【請求項5】
前記車両に関する情報は、当該車両の運転者の状態に関する情報を含む、
ことを特徴とする請求項1〜4のいずれか1項に記載の無線通信方法。
【請求項6】
前記車両に関する情報は、複数の情報から構成され、
前記危険度を算出する工程では、車両に関する情報の各々から危険を表すスコアを算出し、算出された複数のスコアの合計として、危険度が算出される
ことを特徴とする請求項1〜5のいずれか1項に記載の無線通信方法。
【請求項7】
前記多重化通信の方式は、時分割多元接続方式であり、
前記車載端末に割り当てられる通信資源は、タイムスロットである、
ことを特徴とする請求項1〜6のいずれか1項に記載の無線通信方法。
【請求項8】
前記多重化通信の方式は、周波数分割多元接続方式であり、
前記車載端末に割り当てられる通信資源は、周波数チャネルである、
ことを特徴とする請求項1〜6のいずれか1項に記載の無線通信方法。
【請求項9】
前記多重化通信の方法は、符号分割多元接続方式であり、
前記車載端末に割り当てられる通信資源は、拡散符号である、
ことを特徴とする請求項1〜6のいずれか1項に記載の無線通信方法。
【請求項10】
複数の車載端末と少なくとも1つの路側機とから構成され、これらのノードが1つの無線伝送路を利用して多重化通信を行う車両通信システムであって、
車載端末は、自車両に関する情報を取得する情報取得手段と、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する危険度算出手段と、算出された危険度を路側機に通知する危険度通知手段と、を有し、
路側機は、危険度の高い車載端末から優先的に通信資源を割り当てる通信資源割り当て手段を有する
ことを特徴とする車両通信システム。
【請求項11】
車載端末は、前記情報取得手段によって取得された自車両に関する情報を、他の車載端末に通知する情報通知手段をさらに有し、
前記危険度算出手段は、自車両に関する情報に加えて、通知された他車両に関する情報にも基づいて、危険度を算出する
ことを特徴とする請求項10に記載に車両通信システム。
【請求項1】
複数の車載端末と少なくとも1つの路側機とから構成され、これらのノードが1つの無線伝送路を利用して多重化通信を行う車両通信システムにおける無線通信方法であって、
車載端末が自車両に関する情報を取得する工程と、
車載端末が、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する工程と、
車載端末が、算出された危険度を前記路側機に通知する工程と、
路側機が、危険度の高い車両の車載端末から優先的に通信資源を割り当てる工程と、
を含むことを特徴とする無線通信方法。
【請求項2】
車載端末が、取得した自車両に関する情報を他の車載端末に通知する工程、をさらに含み、
前記危険度を算出する工程では、自車両に関する情報に加えて、通知された他車両に関する情報にも基づいて危険度が算出される、
ことを特徴とする請求項1に記載の無線通信方法。
【請求項3】
前記車両に関する情報は、当該車両の挙動に関する情報を含む、
ことを特徴とする請求項1又は2に記載の無線通信方法。
【請求項4】
前記車両に関する情報は、当該車両の操作に関する情報を含む、
ことを特徴とする請求項1〜3のいずれか1項に記載の無線通信方法。
【請求項5】
前記車両に関する情報は、当該車両の運転者の状態に関する情報を含む、
ことを特徴とする請求項1〜4のいずれか1項に記載の無線通信方法。
【請求項6】
前記車両に関する情報は、複数の情報から構成され、
前記危険度を算出する工程では、車両に関する情報の各々から危険を表すスコアを算出し、算出された複数のスコアの合計として、危険度が算出される
ことを特徴とする請求項1〜5のいずれか1項に記載の無線通信方法。
【請求項7】
前記多重化通信の方式は、時分割多元接続方式であり、
前記車載端末に割り当てられる通信資源は、タイムスロットである、
ことを特徴とする請求項1〜6のいずれか1項に記載の無線通信方法。
【請求項8】
前記多重化通信の方式は、周波数分割多元接続方式であり、
前記車載端末に割り当てられる通信資源は、周波数チャネルである、
ことを特徴とする請求項1〜6のいずれか1項に記載の無線通信方法。
【請求項9】
前記多重化通信の方法は、符号分割多元接続方式であり、
前記車載端末に割り当てられる通信資源は、拡散符号である、
ことを特徴とする請求項1〜6のいずれか1項に記載の無線通信方法。
【請求項10】
複数の車載端末と少なくとも1つの路側機とから構成され、これらのノードが1つの無線伝送路を利用して多重化通信を行う車両通信システムであって、
車載端末は、自車両に関する情報を取得する情報取得手段と、取得した自車両に関する情報に基づいて、自車両の危険の程度を表す危険度を算出する危険度算出手段と、算出された危険度を路側機に通知する危険度通知手段と、を有し、
路側機は、危険度の高い車載端末から優先的に通信資源を割り当てる通信資源割り当て手段を有する
ことを特徴とする車両通信システム。
【請求項11】
車載端末は、前記情報取得手段によって取得された自車両に関する情報を、他の車載端末に通知する情報通知手段をさらに有し、
前記危険度算出手段は、自車両に関する情報に加えて、通知された他車両に関する情報にも基づいて、危険度を算出する
ことを特徴とする請求項10に記載に車両通信システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2009−211397(P2009−211397A)
【公開日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願番号】特願2008−53665(P2008−53665)
【出願日】平成20年3月4日(2008.3.4)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年9月17日(2009.9.17)
【国際特許分類】
【出願日】平成20年3月4日(2008.3.4)
【出願人】(502087460)株式会社トヨタIT開発センター (232)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]