
無線通信装置、無線通信装置制御方法、無線通信装置制御プログラム、無線通信システム、無線通信システム制御方法、制御装置、制御装置制御方法、及び、制御装置制御プログラム
【課題】消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行可能な無線通信装置を提供すること。
【解決手段】無線通信装置81は、RODモード及び非RODモードのいずれかの作動モードにて作動する。非RODモードは、通信先装置82と第1の通信方式に従った無線通信を実行可能な起動状態に自装置の状態を設定する。RODモードは、起動状態と、信号を受信するために必要とされる電力が第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ通信先装置と第1の通信方式に従った無線通信を実行不能なスリープ状態と、のいずれかに自装置の状態を設定するように構成され、且つ、予め定められたスリープ条件が成立したとき自装置の状態をスリープ状態に設定するように構成され、且つ、起動指示信号を受信したとき自装置の状態を起動状態に設定する。
【解決手段】無線通信装置81は、RODモード及び非RODモードのいずれかの作動モードにて作動する。非RODモードは、通信先装置82と第1の通信方式に従った無線通信を実行可能な起動状態に自装置の状態を設定する。RODモードは、起動状態と、信号を受信するために必要とされる電力が第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ通信先装置と第1の通信方式に従った無線通信を実行不能なスリープ状態と、のいずれかに自装置の状態を設定するように構成され、且つ、予め定められたスリープ条件が成立したとき自装置の状態をスリープ状態に設定するように構成され、且つ、起動指示信号を受信したとき自装置の状態を起動状態に設定する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置に関する。
【背景技術】
【0002】
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置が知られている。この種の無線通信装置の一つとして、特許文献1に記載の無線通信装置は、通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に状態が設定される。通信先装置は、第1の通信方式に従った無線通信を無線通信装置と行う。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−124461号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記無線通信装置は、通信先装置が無線通信可能な領域内に存在しない場合であっても、状態が起動状態に設定され続ける。従って、無線通信装置が消費する電力の量が無駄に過大となるという問題があった。
【0005】
そこで、予め定められたスリープ条件が成立したとき、上記無線通信装置の状態をスリープ状態に設定するように無線通信装置を構成することが好適であると考えられる。ここで、スリープ状態は、信号を受信するために必要とされる電力が第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり、且つ、通信先装置と第1の通信方式に従った無線通信を実行不能な状態である。
【0006】
ところで、一般に、伝送レートが小さい通信方式ほど、その通信方式に従った信号を受信するために必要とされる電力も小さい。ここで、伝送レートは、単位時間あたりに伝送されるデータの量である。従って、第2の通信方式は、第1の通信方式よりも伝送レートが小さい通信方式である。
【0007】
この場合、通信先装置は、起動指示信号を無線通信装置へ送信する。無線通信装置は、起動指示信号を受信すると、無線通信装置の状態を起動状態に設定する。その後、通信先装置は、無線通信装置と通信する。これによれば、無線通信装置が消費する電力の量を低減することができる。
【0008】
しかしながら、通信先装置が、起動指示信号を送信不能な装置である場合、この通信先装置は、無線通信装置と通信を行うことができない虞がある。即ち、上記のように構成された無線通信装置によれば、無線通信装置が消費する電力の量を低減し、且つ、通信先装置と無線通信を確実に実行できない虞があった。
【0009】
このため、本発明の目的は、上述した課題である「無線通信装置が消費する電力の量を低減した場合に、通信先装置と無線通信を確実に実行できない場合が生じること」を解決することが可能な無線通信装置を提供することにある。
【課題を解決するための手段】
【0010】
かかる目的を達成するため本発明の一形態である無線通信装置は、少なくとも1つの通信先装置と無線通信を実行可能に構成された装置である。
【0011】
更に、この無線通信装置は、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0012】
また、本発明の他の形態である無線通信装置制御方法は、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置に適用され、
上記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させ、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0013】
また、本発明の他の形態である無線通信装置制御プログラムは、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置が実行するプログラムである。
【0014】
更に、この無線通信装置制御プログラムは、
上記無線通信装置に、
上記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させる処理を実行させるとともに、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0015】
また、本発明の他の形態である無線通信システムは、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備えるシステムである。
【0016】
更に、上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
上記非ROD装置は、非RODモードにて作動するように構成され、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0017】
また、本発明の他の形態である無線通信システム制御方法は、
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備える無線通信システムに適用される。
上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記無線通信システム制御方法は、
上記ROD装置を、RODモード、及び、非RODモードのいずれかの作動モードにて作動させ、
上記非ROD装置を、非RODモードにて作動させ、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0018】
また、本発明の他の形態である制御装置は、少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された装置である。
【0019】
更に、上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
上記非ROD装置は、非RODモードにて作動するように構成される。
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
上記制御装置は、
上記複数の無線通信装置のうちの上記ROD装置のそれぞれの上記作動モードを設定する作動モード設定手段を備える。
【0020】
また、本発明の他の形態である制御装置制御方法は、少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置に適用される。
上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
上記非ROD装置は、非RODモードにて作動するように構成される。
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
上記制御装置制御方法は、
上記制御装置が、上記複数の無線通信装置のうちの上記ROD装置のそれぞれの上記作動モードを設定する方法である。
【0021】
また、本発明の他の形態である制御装置制御プログラムは、少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置が実行するプログラムである。
【0022】
更に、上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
上記非ROD装置は、非RODモードにて作動するように構成される。
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
上記制御装置制御プログラムは、
上記制御装置に、
上記複数の無線通信装置のうちの上記ROD装置のそれぞれの上記作動モードを設定する処理を実行させるためのプログラムである。
【0023】
また、本発明の他の形態である無線通信システムは、無線通信可能に構成された無線通信装置を複数備えるシステムである。
【0024】
更に、上記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成する。
上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
上記非ROD装置は、非RODモードにて作動するように構成される。
上記非RODモードは、
自ノードと上記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【0025】
また、本発明の他の形態である無線通信システム制御方法は、無線通信可能に構成された無線通信装置を複数備える無線通信システムに適用される。
上記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成する。
上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記無線通信システム制御方法は、
上記ROD装置を、RODモード、及び、非RODモードのいずれかの作動モードにて作動させ、
上記非ROD装置を、非RODモードにて作動させ、
上記非RODモードは、
自ノードと上記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【0026】
また、本発明の他の形態である無線通信装置は、メッシュ型の通信網におけるノードを構成し、自ノードと上記通信網において隣接するノードである隣接ノードと無線通信可能に構成された装置である。
【0027】
更に、この無線通信装置は、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
上記非RODモードは、
上記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【0028】
また、本発明の他の形態である無線通信装置制御方法は、
メッシュ型の通信網におけるノードを構成し、自ノードと上記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置に適用され、
上記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させ、
上記非RODモードは、
上記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【0029】
また、本発明の他の形態である無線通信装置制御プログラムは、メッシュ型の通信網におけるノードを構成し、自ノードと上記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置が実行するプログラムである。
【0030】
更に、この無線通信装置制御プログラムは、
上記無線通信装置に、
上記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させる処理を実行させるとともに、
上記非RODモードは、
上記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【発明の効果】
【0031】
本発明は、以上のように構成されることにより、消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行することができる。
【図面の簡単な説明】
【0032】
【図1】本発明の第1実施形態に係る無線通信システムの概略構成を表す図である。
【図2】本発明の第1実施形態に係る無線基地局の構成を表すブロック図である。
【図3】本発明の第1実施形態に係る無線基地局が記憶するRODサポート表を表すテーブルである。
【図4】本発明の第1実施形態に係る無線基地局が実行する接続処理を表すフローチャートである。
【図5】本発明の第1実施形態に係る無線通信システムの作動を表すシーケンス図である。
【図6】本発明の第1実施形態に係る無線通信システムの作動を表すシーケンス図である。
【図7】本発明の第1実施形態に係る無線基地局が実行する設定処理を表すフローチャートである。
【図8】無線端末数と平均通信網収束時間との関係を示したグラフである。
【図9】本発明の第1実施形態の第1変形例に係る無線通信システムの概略構成を表す図である。
【図10】本発明の第2実施形態に係る無線通信システムの概略構成を表す図である。
【図11】本発明の第2実施形態に係る制御装置の構成を表すブロック図である。
【図12】本発明の第2実施形態の第2変形例に係る無線通信システムの概略構成を表す図である。
【図13】本発明の第2実施形態の第3変形例に係る無線通信システムの概略構成を表す図である。
【図14】本発明の第3実施形態に係る無線通信システムの概略構成を表す図である。
【図15】本発明の第4実施形態に係る無線通信装置の概略構成を表す図である。
【発明を実施するための形態】
【0033】
以下、本発明に係る、無線通信装置、無線通信装置制御方法、無線通信装置制御プログラム、無線通信システム、無線通信システム制御方法、制御装置、制御装置制御方法、及び、制御装置制御プログラム、の各実施形態について図1〜図15を参照しながら説明する。
【0034】
<第1実施形態>
(構成)
図1に示したように、第1実施形態に係る無線通信システム1は、無線基地局10と、ROD(Radio on Demand)無線端末20と、非ROD無線端末30と、通信端末40と、を備える。
【0035】
本例では、無線基地局10、ROD無線端末20、及び、非ROD無線端末30は、無線LAN(Local Area Network)(例えば、IEEE802.11a、IEEE802.11b、IEEE802.11g、IEEE802.11j、又は、IEEE802.11n等)を構成する。
【0036】
なお、無線基地局10、ROD無線端末20、及び、非ROD無線端末30は、移動体通信網、近距離無線通信網(例えば、Bluetooth(登録商標)、及び、ZigBee(登録商標)等)、WiMAX、IEEE802.11ahにより定められる通信網、IEEE1900.6により定められる通信網等を構成していてもよい。
【0037】
また、無線基地局10は、基地局、Access Point、Base Station、又は、Node Bとも呼ばれる。また、ROD無線端末20、及び、非ROD無線端末30のそれぞれは、無線端末、又は、Stationとも呼ばれる。
【0038】
例えば、無線端末20,30は、パーソナル・コンピュータ、携帯電話端末、PHS(Personal Handyphone System)、PDA(Personal Data Assistance、Personal Digital Assistant)、スマートフォン、カーナビゲーション端末、又は、ゲーム端末等である。
【0039】
無線基地局10と通信端末40とは、通信網(本例では、基幹通信網)NWを介して互いに通信可能に接続されている。
ROD無線端末20、及び、非ROD無線端末30のそれぞれは、無線基地局10と無線通信を行うことにより、無線基地局10を介して通信端末40と通信を行う(例えば、通信パケットを送受信する)。
【0040】
本例では、ROD無線端末20は、第1のユーザにより携帯されている。従って、ROD無線端末20は、第1のユーザの移動に伴って移動する。同様に、非ROD無線端末30は、第2のユーザにより携帯されている。従って、非ROD無線端末30は、第2のユーザの移動に伴って移動する。
【0041】
なお、無線通信システム1は、複数のROD無線端末20を備えていてもよい。また、無線通信システム1は、複数の非ROD無線端末30を備えていてもよい。
【0042】
無線基地局10は、ROD無線端末20、及び、非ROD無線端末30のそれぞれと無線通信を実行可能に構成される。具体的には、無線基地局10は、無線基地局10との間の距離が所定の閾値距離よりも短い無線端末20,30と無線通信を実行可能に構成される。
【0043】
ROD無線端末20は、予め定められた起動指示(ウェイクアップ)信号を送信可能に構成される。非ROD無線端末30は、起動指示信号を送信不能に構成される。
なお、無線基地局10は、無線通信装置を構成している。また、ROD無線端末20、及び、非ROD無線端末30のそれぞれは、通信先装置を構成している。
【0044】
より具体的に述べると、図2に示したように、無線基地局10は、第1の通信制御部11と、第2の通信制御部12と、起動指示信号受信部13と、パケット転送部14と、状態制御部(対応情報取得手段)15と、電力供給部16と、を備える。
【0045】
第1の通信制御部11は、第1の通信方式に従った無線通信を実行するように構成される。本例では、第1の通信方式は、DSSS(Direct Sequence Spread Spectrum)、CCK(Complementary Code Keying)、又は、OFDM(Orthogonal Frequency Division Multiplexing)等である。
【0046】
本例では、第1の通信方式は、周波数帯域として、2.4GHz帯、又は、5GHz帯を用いる。
第1の通信制御部11は、無線端末20,30のそれぞれと無線通信を実行する。
【0047】
更に、第1の通信制御部11は、予め設定された送信周期が経過する毎に、無線基地局10と無線通信可能であることを通知するためのビーコン信号(Beaconフレーム)を送信する。本例では、ビーコン信号は、無線基地局10を識別するための識別子(例えば、ESSID(Extended Service Set Identifier)、又は、BSSID(Basic Service Set Identifier)等)を含む。
【0048】
第2の通信制御部12は、有線通信(通信ケーブルを介した通信)を実行するように構成される。第2の通信制御部12は、通信網NWを介して通信端末40と通信を実行する。
【0049】
なお、無線基地局10は、2つの通信制御部(第1の通信制御部11、及び、第2の通信制御部12)を備えるが、3つ以上の通信制御部を備えていてもよい。
【0050】
起動指示信号受信部13は、第2の通信方式に従った起動指示信号を受信するように構成される。第2の通信方式は、信号を受信するために必要とされる電力が第1の通信方式よりも小さい通信方式である。
【0051】
本例では、第2の通信方式は、OOK(On Off Keying)、ASK(Amplitude Shift Keying)、又は、FSK(Frequency Shift Keying)等である。本例では、第2の通信方式は、周波数帯域として、第1の通信方式と同じ周波数帯域を用いる。
【0052】
パケット転送部14は、第1の通信制御部11を介して受信されたパケットを第2の通信制御部12を介して送信するように構成される。更に、パケット転送部14は、第2の通信制御部12を介して受信されたパケットを第1の通信制御部11を介して送信するように構成される。
【0053】
また、パケット転送部14は、第1の通信制御部11を介して、後述する対応可能通知が受信された場合、受信された対応可能通知を状態制御部15へ出力する。
【0054】
状態制御部15は、RODサポート表記憶部151を有する。RODサポート表記憶部151は、図3に示したように、対応情報を含むRODサポート表を記憶する。1つの対応情報は、無線端末を識別するための無線端末識別情報と、ROD情報と、を含む。
【0055】
ROD情報は、起動指示信号を送信可能であるか否かを表す情報である。本例では、ROD情報としての「ROD可」は、起動指示信号を送信可能である旨を表す。更に、ROD情報としての「ROD不可」は、起動指示信号を送信不能である旨を表す。
【0056】
状態制御部15は、第1の通信制御部11を介して、無線端末20,30のそれぞれへ通知送信要求を送信する。通知送信要求は、対応可能通知の送信を要求する情報である。対応可能通知は、起動指示信号を送信可能であることを表す情報である。
【0057】
ROD無線端末20は、無線基地局10から通知送信要求を受信した場合、対応可能通知を無線基地局10へ送信する。一方、非ROD無線端末30は、対応可能通知を送信しない。
【0058】
状態制御部15は、送信した通知送信要求に応じて、予め設定された待機時間内に、無線端末20,30から対応可能通知をパケット転送部14を介して受信した場合、当該無線端末20,30に対して当該無線端末20,30が起動指示信号を送信可能である(ROD対応装置である)ことを表す対応情報を取得する。
【0059】
一方、状態制御部15は、送信した通知送信要求に応じて、上記待機時間内に、無線端末20,30から対応可能通知を受信しなかった場合、当該無線端末20,30に対して当該無線端末20,30が起動指示信号を送信不能である(ROD非対応装置である)ことを表す対応情報を取得する。
【0060】
このようにして、状態制御部15は、無線端末20,30のそれぞれに対して対応情報を取得する。そして、状態制御部15は、取得された対応情報をRODサポート表記憶部151に記憶させる。
【0061】
電力供給部16は、第1の通信制御部11、第2の通信制御部12、起動指示信号受信部13、パケット転送部14、及び、状態制御部15のそれぞれへ、電力供給線を介して電力を供給可能に構成される。電力供給部16は、第1の通信制御部11へ電力を供給する電力供給状態と、第1の通信制御部11への電力の供給を中止する電力遮断状態と、に状態が切り替わるように構成されている。
【0062】
なお、電力供給部16の状態が電力供給状態に設定されることは、無線基地局10の状態が起動状態に設定されることに対応している。更に、電力供給部16の状態が電力遮断状態に設定されることは、無線基地局10の状態がスリープ状態に設定されることに対応している。
【0063】
更に、無線基地局10は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
【0064】
無線基地局10が非RODモードにて作動する場合、無線基地局10は、常時、無線基地局10の状態を起動状態に設定する。更に、無線基地局10が非RODモードにて作動する場合、無線基地局10は、予め定められた第1の省電力条件が成立しない場合、送信周期を第1の送信周期に設定し、一方、第1の省電力条件が成立する場合、送信周期を第1の送信周期よりも長い第2の送信周期に設定する。
【0065】
例えば、第1の省電力条件は、現時点よりも、予め設定された第1の閾値時間だけ前の時点から、現時点までの間に、無線通信が行われていない、という条件である。
【0066】
無線基地局10が非RODモードにて作動する場合、無線基地局10は、予め定められた第2の省電力条件が成立する場合、作動停止通知を送信するとともに、無線基地局10への電力の供給を遮断する。
【0067】
ここで、作動停止通知は、無線基地局10が作動を停止する予定であることを通知するための情報である。また、第2の省電力条件は、現時点よりも、予め設定された第2の閾値時間だけ前の時点から、現時点までの間に、無線通信が行われていない、という条件である。例えば、第2の閾値時間は、第1の閾値時間よりも長いことが好適である。
例えば、無線基地局10は、IEEE802.11v(BSS Transition Management)により定められた方法を用いてもよい。
【0068】
また、無線基地局10がRODモードにて作動する場合、無線基地局10は、起動状態とスリープ状態とのいずれかに無線基地局10の状態を設定する。
【0069】
更に、無線基地局10がRODモードにて作動する場合、無線基地局10は、無線基地局10の状態が起動状態であり、且つ、予め定められたスリープ条件が成立したとき、無線基地局10の状態をスリープ状態に設定する。例えば、スリープ条件は、現時点よりも、予め設定された第3の閾値時間だけ前の時点から、現時点までの間に、無線通信が行われていない、という条件である。
【0070】
加えて、無線基地局10がRODモードにて作動する場合、無線基地局10は、無線基地局10の状態がスリープ状態であり、且つ、起動指示信号が受信されたとき、無線基地局10の状態を起動状態に設定する。
【0071】
状態制御部15は、予め定められた設定タイミングにて(例えば、予め設定された周期が経過する毎に、又は、RODサポート表記憶部151に記憶されているRODサポート表が変更される毎に)、作動モードを、RODモード又は非RODモードに設定する。
【0072】
具体的には、状態制御部15は、RODサポート表記憶部151に記憶されている、すべての対応情報のそれぞれが、ROD情報として「ROD可」を含む場合(即ち、取得された対応情報が、無線端末20,30のすべてがROD対応装置であることを表す場合)、作動モードをRODモードに設定する。これにより、無線基地局10は、設定された作動モード(RODモード)にて作動する。
【0073】
一方、状態制御部15は、RODサポート表記憶部151に記憶されている対応情報の少なくとも1つが、ROD情報として「ROD不可」を含む場合(即ち、取得された対応情報が、無線端末20,30の少なくとも1つがROD非対応装置であることを表す場合)、作動モードを非RODモードに設定する。これにより、無線基地局10は、設定された作動モード(非RODモード)にて作動する。
【0074】
(作動)
次に、上述した無線通信システム1の作動について説明する。
無線基地局10は、無線基地局10の状態が起動状態に設定されている場合、図4にフローチャートにより示した接続処理を、送信周期が経過する毎に実行するようになっている。
【0075】
具体的には、無線基地局10は、接続処理の実行を開始すると、ビーコン信号を送信する(ステップS101)。このビーコン信号は、RODサポート情報を含む。RODサポート情報は、ROD機能をサポートする旨を表す情報である。ROD機能は、RODモードにて無線基地局10を作動可能な機能である。
【0076】
なお、無線基地局10は、無線端末20,30から探査要求(Probe Requestフレーム)を受信した場合、当該無線端末20,30へ探査応答(Probe Responseフレーム)を送信し、その後、ステップS102〜ステップS111の処理を実行する接続処理も実行するようになっている。探査応答も、RODサポート情報を含む。
【0077】
一方、ROD無線端末20は、無線基地局10からビーコン信号を受信する。ROD無線端末20は、受信したビーコン信号がRODサポート情報を含む場合、対応可能通知を含む接続要求(Association Requestフレーム)を無線基地局10へ送信する。
【0078】
なお、ROD無線端末20は、受信したビーコン信号がRODサポート情報を含まない場合、対応可能通知を含まない接続要求を送信する。また、ROD無線端末20は、受信したビーコン信号がRODサポート情報を含む場合であっても、対応可能通知を含まない接続要求を送信するように構成されていてもよい。
【0079】
また、非ROD無線端末30は、無線基地局10からビーコン信号を受信する。非ROD無線端末30は、受信したビーコン信号がRODサポート情報を含むか否かにかかわらず、対応可能通知を含まない接続要求を無線基地局10へ送信する。
【0080】
先ず、無線基地局10がROD無線端末20から対応可能通知を含む接続要求を受信した場合について説明する。
【0081】
この場合、無線基地局10は、ステップS102にて接続要求を受信したか否かを判定すると、「Yes」と判定してステップS103へ進む。そして、無線基地局10は、接続要求を送信してきた無線端末(ROD無線端末20)と、無線基地局10と、の間で接続が既に確立されている(接続が確立済みである)か否かを判定する。
【0082】
この時点では、無線基地局10とROD無線端末20との間で接続が確立されていないので、無線基地局10は、「No」と判定してステップS104へ進む。そして、無線基地局10は、接続要求を送信してきた無線端末(ROD無線端末20)がROD対応装置である(接続要求に対応可能通知が含まれている)か否かを判定する。
【0083】
従って、無線基地局10は、「Yes」と判定してステップS105へ進み、接続要求を送信してきた無線端末(ROD無線端末20)を識別するための無線端末識別情報と、「ROD可」であるROD情報と、を含む対応情報を新たに記憶する(即ち、RODサポート表に追加する)。
【0084】
その後、無線基地局10は、接続応答(Association Responseフレーム)を、接続要求を送信してきた無線端末(ROD無線端末20)へ送信する(ステップS106)。その後、無線基地局10は、図4に示した接続処理の実行を終了する。
【0085】
次に、無線基地局10がROD無線端末20から対応可能通知を含まない接続要求を受信した場合について説明する。図5は、この場合における、無線基地局10及びROD無線端末20の作動の概要を示したシーケンス図である。
【0086】
この場合、上述した場合と同様に、無線基地局10は、ビーコン信号を送信する(図4のステップS101、及び、図5のステップS201)。
【0087】
そして、ROD無線端末20は、対応可能通知を含まない接続要求を無線基地局10へ送信する(図5のステップS202)。従って、無線基地局10は、ステップS104に進んだとき、「No」と判定してステップS107へ進む。
【0088】
そして、無線基地局10は、接続要求を送信してきた無線端末(ROD無線端末20)へ、通知送信要求を送信する(図5のステップS203)。
【0089】
一方、ROD無線端末20は、無線基地局10から通知送信要求を受信する。ROD無線端末20は、通知送信要求を受信した場合、対応可否通知としての対応可能通知を無線基地局10へ送信する(図5のステップS204)。
【0090】
ここで、対応可否通知は、対応可能通知、又は、対応不能通知である。対応不能通知は、起動指示信号を送信不能であることを表す情報である。これにより、無線基地局10は、ROD無線端末20から対応可否通知を受信する。
【0091】
従って、無線基地局10は、ステップS108にて、通知送信要求を送信してから待機時間が経過するまでの間に対応可否通知を受信したか否かを判定すると、「Yes」と判定してステップS109へ進む。そして、無線基地局10は、接続要求を送信してきた無線端末(ROD無線端末20)がROD対応装置である(通知送信要求に応じて対応可能通知が受信された)か否かを判定する。
【0092】
従って、無線基地局10は、「Yes」と判定してステップS110へ進み、接続要求を送信してきた無線端末(ROD無線端末20)を識別するための無線端末識別情報と、「ROD可」であるROD情報と、を含む対応情報を新たに記憶する(図5のステップS205)。
【0093】
その後、無線基地局10は、接続応答を、接続要求を送信してきた無線端末(ROD無線端末20)へ送信する(ステップS106)。その後、無線基地局10は、図4に示した接続処理の実行を終了する。
【0094】
次に、無線基地局10が非ROD無線端末30から対応可能通知を含まない接続要求を受信した場合について説明する。図6は、この場合における、無線基地局10及び非ROD無線端末30の作動の概要を示したシーケンス図である。
【0095】
この場合、上述した場合と同様に、無線基地局10は、ビーコン信号を送信する(図4のステップS101、及び、図6のステップS301)。
【0096】
そして、非ROD無線端末30は、対応可能通知を含まない接続要求を無線基地局10へ送信する(図6のステップS302)。従って、無線基地局10は、ステップS104に進んだとき、「No」と判定してステップS107へ進む。
【0097】
そして、無線基地局10は、接続要求を送信してきた無線端末(非ROD無線端末30)へ、通知送信要求を送信する(図6のステップS303)。
【0098】
一方、非ROD無線端末30は、無線基地局10から通知送信要求を受信する。非ROD無線端末30は、通知送信要求を受信した場合であっても、対応可否通知を送信しない。なお、非ROD無線端末30は、通知送信要求を受信した場合、対応可否通知としての対応不能通知を無線基地局10へ送信するように構成されていてもよい。
【0099】
従って、無線基地局10は、ステップS108にて、通知送信要求を送信してから待機時間が経過するまでの間に対応可否通知を受信したか否かを判定すると、「No」と判定してステップS111へ進む。
【0100】
そして、無線基地局10は、接続要求を送信してきた無線端末(非ROD無線端末30)を識別するための無線端末識別情報と、「ROD不可」であるROD情報と、を含む対応情報を新たに記憶する(図6のステップS304)。
【0101】
その後、無線基地局10は、接続応答を、接続要求を送信してきた無線端末(非ROD無線端末30)へ送信する(ステップS106)。その後、無線基地局10は、図4に示した接続処理の実行を終了する。
【0102】
なお、無線基地局10は、非ROD無線端末30から対応可否通知としての対応不能通知を受信した場合、ステップS108にて「Yes」と判定し、ステップS109にて「No」と判定してステップS111へ進む。この場合も、無線基地局10は、接続要求を送信してきた無線端末(非ROD無線端末30)を識別するための無線端末識別情報と、「ROD不可」であるROD情報と、を含む対応情報を新たに記憶する。
【0103】
また、接続要求を送信してきた無線端末と無線基地局10との間で既に接続が確立されている場合、無線基地局10は、ステップS103にて「Yes」と判定して、図4に示した接続処理の実行を終了する。
【0104】
また、ビーコン信号を送信してから、予め設定されたタイムアウト時間が経過するまでに、接続要求が受信されなかった場合、無線基地局10は、ステップS102にて「No」と判定して、図4に示した接続処理の実行を終了する。
【0105】
更に、無線基地局10の状態が起動状態に設定されている場合において、図7にフローチャートにより示した設定処理を、設定タイミングにて(本例では、RODサポート表記憶部151に記憶されているRODサポート表が変更される毎に)、実行するようになっている。
【0106】
具体的には、無線基地局10は、設定処理の実行を開始すると、RODサポート表記憶部151に記憶されているRODサポート表を走査する(即ち、RODサポート表記憶部151に記憶されている対応情報を取得する)(ステップS401)。
【0107】
そして、無線基地局10は、無線基地局10と無線通信を実行可能な(即ち、接続要求を送信してきた)無線端末のすべてが、起動指示信号を送信可能であるか否かを判定する。即ち、無線基地局10は、RODサポート表に含まれる対応情報のすべてが、ROD情報として「ROD可」を含むか否かを判定する。
【0108】
いま、ROD無線端末20及び非ROD無線端末30の両方が、無線基地局10へ接続要求を送信した場合を想定する。この場合、RODサポート表に含まれる対応情報は、ROD情報として「ROD可」を含む第1の対応情報と、ROD情報として「ROD不可」を含む第2の対応情報と、を含む。
【0109】
従って、無線基地局10は、「No」と判定してステップS404へ進み、無線基地局10の作動モードを非RODモードに設定する。そして、無線基地局10は、図7に示した設定処理の実行を終了する。
【0110】
また、ROD無線端末20のみが、無線基地局10へ接続要求を送信した場合を想定する。この場合、RODサポート表に含まれる対応情報は、ROD情報として「ROD可」を含む第1の対応情報のみを含む。
【0111】
従って、無線基地局10は、ステップS403にて「Yes」と判定してステップS403へ進み、無線基地局10の作動モードをRODモードに設定する。そして、無線基地局10は、図7に示した設定処理の実行を終了する。
【0112】
また、非ROD無線端末30のみが、無線基地局10へ接続要求を送信した場合を想定する。この場合、RODサポート表に含まれる対応情報は、ROD情報として「ROD不可」を含む第2の対応情報のみを含む。
【0113】
従って、無線基地局10は、ステップS403にて「No」と判定してステップS404へ進み、無線基地局10の作動モードを非RODモードに設定する。そして、無線基地局10は、図7に示した設定処理の実行を終了する。
【0114】
以上、説明したように、本発明の第1実施形態に係る無線基地局10は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
【0115】
これによれば、起動指示信号を送信可能な通信先装置(本例では、ROD無線端末20)と、起動指示信号を送信不能な通信先装置(本例では、非ROD無線端末30)と、が混在している場合においても、無線基地局10が消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行することができる。
【0116】
更に、本発明の第1実施形態に係る無線基地局10は、通知送信要求を通信先装置のそれぞれへ送信するように構成される。加えて、無線基地局10は、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信した場合、当該通信先装置に対して当該通信先装置がROD対応装置であることを表す対応情報を取得するように構成される。更に、無線基地局10は、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信しなかった場合、当該通信先装置に対して当該通信先装置がROD非対応装置であることを表す対応情報を取得するように構成される。
【0117】
これによれば、すべての通信先装置に対する対応情報を確実に取得することができる。
【0118】
加えて、本発明の第1実施形態に係る無線基地局10において、非RODモードは、第1の省電力条件が成立しない場合、送信周期を第1の送信周期に設定し、一方、当該第1の省電力条件が成立する場合、当該送信周期を当該第1の送信周期よりも長い第2の送信周期に設定するように構成される。
【0119】
これによれば、無線基地局10が非RODモードにて作動している場合においても、無線基地局10が消費する電力の量を低減することができる。
【0120】
更に、本発明の第1実施形態に係る無線基地局10において、非RODモードは、第2の省電力条件が成立する場合、無線基地局10が作動を停止する予定であることを通知するための作動停止通知を送信するとともに、無線基地局10への電力の供給を遮断するように構成される。
【0121】
これによれば、無線基地局10が非RODモードにて作動している場合においても、無線基地局10が消費する電力の量を低減することができる。
【0122】
更に、本発明の第1実施形態に係る無線基地局10が奏する効果について図8を参照しながら説明する。図8は、無線基地局10と無線通信可能な無線端末の数(無線端末数)と、平均通信網収束時間と、の関係を示したグラフである。
【0123】
平均通信網収束時間は、無線端末と無線基地局10との間で接続が確立された後、無線端末と無線基地局10との間で無線通信が行われなくなってから、通信網NWが安定するまでに要する平均時間を表す。
【0124】
無線端末のうちの起動指示信号を送信可能な無線端末は、ROD対応装置と呼ばれる。また、無線端末のうちの起動指示信号を送信不能な無線端末は、ROD非対応装置と呼ばれる。
【0125】
ところで、無線端末数が比較的大きくなると、通信網NWは収束しなくなる。従って、図8においても、無線端末数が大きくなるにつれて、平均通信網収束時間は、大きくなる。
また、平均通信網収束時間が大きくなるほど、無線基地局10の状態がスリープ状態に設定される時間が短くなる。従って、平均通信網収束時間が大きくなるほど、無線基地局10が消費する電力の量は、大きくなる。
【0126】
図8において、実線C1は、第1実施形態に係る無線基地局10と、ROD対応装置及びROD非対応装置の両方を含む無線端末と、を備える比較例に係る無線通信システムに対するグラフである。
【0127】
また、一点鎖線C2は、ユーザにより入力された指示に従って作動モードを設定するように構成された無線基地局と、ROD対応装置及びROD非対応装置の両方を含む無線端末と、を備える第1の比較例に係る無線通信システムに対するグラフである。
【0128】
また、点線C3は、常時、RODモードにて作動する無線基地局と、ROD対応装置のみを含む無線端末と、を備える第2の比較例に係る無線通信システムに対するグラフである。
【0129】
第2の比較例においては、無線基地局が、常時、RODモードにて作動する。従って、ROD非対応装置が無線基地局と無線通信を実行できない場合が生じる。
【0130】
また、第1の比較例においては、ユーザが指示を入力することにより作動モードを変更する遅延時間が余分に発生する。従って、第1の比較例においては、同一の無線端末数に対する平均通信網収束時間は、第1実施形態よりも大きくなる。
【0131】
このように、第1実施形態に係る無線基地局10によれば、平均通信網収束時間をより短くすることができるので、無線基地局10が消費する電力の量を小さくすることができる。更に、第1実施形態に係る無線基地局10によれば、ROD非対応装置とも確実に無線通信を行うことができる。
【0132】
なお、第1実施形態に係る無線基地局10において、電力供給部16は、第1の通信制御部11への電力の供給を中止している場合にのみ、起動指示信号受信部13へ電力を供給するように構成されていてもよい。
【0133】
また、第1実施形態の第1変形例に係る無線通信システム1Aは、図9に示したように、ホームゲートウェイ51と、テレビ52と、携帯ゲーム機53と、ルータ54と、火災報知器55と、ガス漏れ検知器56と、を備える。
【0134】
本例では、ホームゲートウェイ51、テレビ52、携帯ゲーム機53、及び、ルータ54は、第1の通信網NW1(本例では、無線LAN)を構成する。なお、第1の通信網NW1は、移動体通信網、近距離無線通信網、又は、WiMAX等であってもよい。
ホームゲートウェイ51は、インターネット網NWWに接続されている。
【0135】
また、ルータ54、火災報知器55、及び、ガス漏れ検知器56は、第2の通信網NW2(本例では、有線LAN)を構成する。なお、第2の通信網NW2は、無線LAN、移動体通信網、近距離無線通信網、又は、WiMAX等であってもよい。
【0136】
即ち、ルータ54は、ホームゲートウェイ51と、テレビ52、携帯ゲーム機53、及び、ルータ54と、により構成される第1の通信網NW1に加えて、第1の通信網NW1と異なる第2の通信網NW2を構成する装置である、と言うことができる。
【0137】
ホームゲートウェイ51は、第1実施形態に係る無線基地局10と同様の構成を有する。また、テレビ52、携帯ゲーム機53、及び、ルータ54のそれぞれは、第1実施形態に係るROD無線端末20又は非ROD無線端末30と同様の構成を有する。
【0138】
この第1変形例に係る無線通信システム1Aによっても、第1実施形態に係る無線通信システム1と同様の作用及び効果を奏することができる。
【0139】
<第2実施形態>
次に、本発明の第2実施形態に係る無線通信システムについて説明する。第2実施形態に係る無線通信システムは、上記第1実施形態に係る無線通信システムに対して、複数の無線通信装置と、各無線通信装置の作動モードを設定する制御装置と、を備える点において相違している。従って、以下、かかる相違点を中心として説明する。
【0140】
第2実施形態に係る無線通信システム2は、図10に示したように、制御装置(ネットワーク・コントローラ)61と、複数(本例では、3つ)の無線基地局62a,62b,62cと、複数(本例では、3つ)の無線端末63a,63b,63cと、を備える。
【0141】
なお、無線通信システム2は、1つ、2つ、又は、4つ以上の無線基地局を備えていてもよい。また、無線通信システム2は、1つ、2つ、又は、4つ以上の無線端末を備えていてもよい。また、無線基地局62a,62b,62cは、ルータ、又は、LANスイッチであってもよい。
【0142】
制御装置61と、複数の無線基地局62a,62b,62cのそれぞれと、は通信網NW3を介して互いに通信可能に接続されている。なお、制御装置61は、複数の無線基地局62a,62b,62cのそれぞれと直接に接続されていてもよい。
【0143】
複数の無線基地局62a,62b,62cのそれぞれは、複数の無線端末63a,63b,63cのそれぞれと無線通信を実行可能に構成される。具体的には、複数の無線基地局62a,62b,62cのそれぞれは、当該無線基地局との間の距離が所定の閾値距離よりも短い無線端末63a,63b,63cと無線通信を実行可能に構成される。
【0144】
複数の無線端末63a,63b,63cのそれぞれは、起動指示信号を送信可能なROD対応装置、又は、起動指示信号を送信不能なROD非対応装置である。
なお、複数の無線基地局62a,62b,62cのそれぞれは、無線通信装置を構成している。また、複数の無線端末63a,63b,63cのそれぞれは、通信先装置を構成している。
【0145】
本例では、複数の無線端末63a,63b,63cのそれぞれは、異なるユーザにより携帯されている。従って、各無線端末63a,63b,63cは、当該無線端末を携帯するユーザの移動に伴って移動する。
【0146】
複数の無線基地局62a,62b,62cのそれぞれは、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。即ち、複数の無線基地局62a,62b,62cのそれぞれは、ROD装置である。
【0147】
複数の無線基地局62a,62b,62cのそれぞれのRODモードにおける作動は、第1実施形態に係る無線基地局10のRODモードにおける作動と同様である。また、複数の無線基地局62a,62b,62cのそれぞれの非RODモードにおける作動は、第1実施形態に係る無線基地局10の非RODモードにおける作動と同様である。
【0148】
複数の無線基地局62a,62b,62cのそれぞれは、第1実施形態に係る無線基地局10と同様に、図4に示した接続処理を実行する。従って、複数の無線基地局62a,62b,62cのそれぞれは、自局と無線通信可能な無線端末のそれぞれに対して対応情報を取得し、取得された対応情報をRODサポート表に追加する。
【0149】
複数の無線基地局62a,62b,62cのそれぞれは、予め定められた設定タイミングにて(例えば、予め設定された周期が経過する毎に、又は、RODサポート表記憶部151に記憶されているRODサポート表が変更される毎に)、図7に示した設定処理を実行することに代えて、RODサポート表を制御装置61へ送信する。
【0150】
また、複数の無線基地局62a,62b,62cのそれぞれは、制御装置61から作動モード設定情報を受信する。作動モード設定情報は、RODモードを表す情報、又は、非RODモードを表す情報である。複数の無線基地局62a,62b,62cのそれぞれは、作動モード設定情報を受信した場合、作動モードを、作動モード設定情報が表す作動モードに設定する。
【0151】
一方、制御装置61は、図11に示したように、RODサポート表受信部61aと、作動モード決定部61bと、作動モード設定情報送信部61cと、を備える。RODサポート表受信部61aは、対応情報取得手段を構成している。また、作動モード決定部61b及び作動モード設定情報送信部61cは、作動モード設定手段を構成している。
【0152】
RODサポート表受信部61aは、複数の無線端末63a,63b,63cのそれぞれからRODサポート表を受信する。RODサポート表受信部61aは、受信されたRODサポート表を、当該RODサポート表を送信してきた無線端末を識別するための情報と対応付けて記憶する。
【0153】
作動モード決定部61bは、複数の無線端末63a,63b,63cのそれぞれに対して、RODサポート表受信部61aに記憶されているRODサポート表に基づいて作動モードを決定する。具体的には、作動モード決定部61bは、作動モードを決定する対象となる無線端末(対象無線端末)を識別するための情報と対応付けて記憶されているRODサポート表に基づいて、対象無線端末の作動モードを決定する。
【0154】
作動モード決定部61bは、第1実施形態に係る無線基地局10と同様に、RODサポート表に含まれる、すべての対応情報のそれぞれが、ROD情報として「ROD可」を含む場合、作動モードとしてRODモードを決定する。一方、作動モード決定部61bは、第1実施形態に係る無線基地局10と同様に、RODサポート表に含まれる対応情報の少なくとも1つが、ROD情報として「ROD不可」を含む場合、作動モードとして非RODモードを決定する。
【0155】
作動モード設定情報送信部61cは、作動モード決定部61bにより決定された作動モードを表す作動モード設定情報を、当該作動モードを決定する対象となった無線端末へ送信する。
【0156】
即ち、制御装置61は、複数の無線基地局62a,62b,62cのそれぞれに対して、独立に、図7に示した設定処理を実行する。なお、第2実施形態においては、当該設定処理にて、制御装置61は、作動モード設定情報を無線基地局へ送信することにより、当該無線基地局の作動モードを設定する。
【0157】
従って、例えば、複数の無線端末63a,63b,63cのすべてがROD対応装置である場合、制御装置61は、複数の無線基地局62a,62b,62cのすべての作動モードをRODモードに設定する。
【0158】
また、例えば、無線端末63a、及び、無線端末63bのそれぞれがROD対応装置であり、且つ、無線端末63cがROD非対応装置である場合を想定する。更に、無線端末63a、及び、無線端末63bのそれぞれが無線基地局62aと無線通信可能であり、且つ、無線端末63cが無線基地局62cと無線通信可能である場合を想定する。この場合、制御装置61は、無線基地局62a、及び、無線基地局62bのそれぞれの作動モードをRODモードに設定し、且つ、無線基地局62cの作動モードを非RODモードに設定する。
【0159】
このように、第2実施形態に係る無線通信システム2によっても、第1実施形態に係る無線通信システム1と同様の作用及び効果を奏することができる。
【0160】
なお、無線通信システム2は、非RODモードのみにて作動するように構成された非ROD装置としての無線基地局を更に備えていてもよい。
【0161】
次に、第2実施形態の第1変形例に係る無線通信システム2について説明する。この第1変形例に係る制御装置61は、複数の無線基地局62a,62b,62cのすべての作動モードを同一の作動モードに設定する。
【0162】
具体的には、制御装置61は、記憶しているRODサポート表のすべてに含まれるすべての対応情報のそれぞれが、ROD情報として「ROD可」を含む場合、作動モードとしてRODモードを決定する。一方、制御装置61は、記憶しているRODサポート表のすべてに含まれる対応情報の少なくとも1つが、ROD情報として「ROD不可」を含む場合、作動モードとして非RODモードを決定する。
【0163】
そして、制御装置61は、決定された作動モードを表す作動モード設定情報を、複数の無線端末63a,63b,63cのそれぞれへ送信する。
【0164】
従って、例えば、複数の無線端末63a,63b,63cのすべてがROD対応装置である場合、制御装置61は、複数の無線基地局62a,62b,62cのすべての作動モードをRODモードに設定する。
【0165】
また、例えば、無線端末63a、及び、無線端末63bのそれぞれがROD対応装置であり、且つ、無線端末63cがROD非対応装置である場合、制御装置61は、複数の無線基地局62a,62b,62cのすべての作動モードを非RODモードに設定する。
【0166】
これによれば、ROD非対応装置が、いずれの無線基地局(ROD装置)と無線通信可能となった場合においても、当該無線基地局と確実に無線通信を行うことができる。
【0167】
次に、図12に示したように、第2実施形態の第2変形例に係る無線通信システム2Aについて説明する。本例では、無線端末63a、及び、無線端末63bのそれぞれがROD対応装置であり、且つ、無線端末63cがROD非対応装置である場合を想定する。
【0168】
第2変形例に係る無線通信システム2Aにおいては、ROD非対応装置である無線端末63cは、自端末の位置を表す位置情報を取得し、取得された位置情報を無線基地局62cを介して制御装置61へ送信する。なお、無線通信システム2Aは、ROD非対応装置と無線通信可能な無線基地局が、ROD非対応装置の位置を表す位置情報を取得し、取得された位置情報を制御装置61へ送信するように構成されていてもよい。
【0169】
制御装置61は、受信した位置情報に基づいて、無線端末63cが接続を確立すべき無線基地局を決定する。制御装置61は、決定された無線基地局(第2の無線基地局)が、現時点にて無線端末63cとの間で接続が確立されている(無線端末63cと無線通信可能な)無線基地局(第1の無線基地局)と異なる場合、移行処理を実行する。
【0170】
移行処理は、第2の無線基地局の作動モードを非RODモードに設定する処理と、第1の無線基地局の作動モードをRODモードに設定する処理と、を含む。具体的には、移行処理は、第2の無線基地局の状態が、スリープ状態である場合、起動指示信号を第2の無線基地局へ送信し、その後、作動モード設定情報を第2の無線基地局へ送信する処理を含む。
【0171】
いま、無線端末63a、及び、無線端末63bのそれぞれが無線基地局62aと無線通信可能であり、且つ、無線端末63cが無線基地局62cと無線通信可能である場合を想定する。この場合、制御装置61は、無線基地局62a、及び、無線基地局62bのそれぞれの作動モードをRODモードに設定し、且つ、無線基地局62cの作動モードを非RODモードに設定する。
【0172】
その後、無線端末63cが、無線基地局62bとの間で接続を確立すべき位置へ移動した(図12の矢印A1)場合を想定する。この場合、無線端末63cが制御装置61へ送信した位置情報(図12の矢印A2)に基づいて、制御装置61は、無線端末63cが接続を確立すべき無線基地局を決定する。
【0173】
そして、制御装置61は、無線基地局62bの状態がスリープ状態である場合、無線基地局62bへ起動指示信号を送信する(図12の矢印A3)。更に、制御装置61は、非RODモードを表す作動モード設定情報を無線基地局62bへ送信し、且つ、RODモードを表す作動モード設定情報を無線基地局62cへ送信する。
【0174】
このように、第2変形例に係る制御装置61は、ROD非対応装置である無線端末63cと無線通信可能な無線基地局が、無線基地局62c(第1の無線通信装置)から無線基地局62b(第2の無線通信装置)へ変化する場合において、無線基地局62bの作動モードを非RODモードに設定し、且つ、無線基地局62cの作動モードをRODモードに設定する。
【0175】
これによれば、ROD非対応装置である無線端末63cが移動することにより、無線基地局62bと無線通信可能となった場合において、無線端末63cが無線基地局62bと確実に無線通信を行うことができる。更に、無線基地局62cが消費する電力の量を低減することもできる。
【0176】
次に、図13に示したように、第2実施形態の第3変形例に係る無線通信システム2Cについて説明する。この第3変形例に係る無線通信システム2Cは、3つの無線基地局62a,62b,62cに加えて、2つの無線基地局62d,62eを備える。
【0177】
2つの無線基地局62d,62eのそれぞれも、無線基地局62a,62b,62cと同様に構成される。即ち、複数の無線基地局62a〜62eのそれぞれは、ROD装置である。なお、無線通信システム2Cは、非ROD装置である無線基地局を更に備えていてもよい。
【0178】
第3変形例に係る制御装置61は、複数の無線基地局62a〜62eのそれぞれの位置を表す位置情報を取得する位置情報取得部(位置情報取得手段)を備える。
【0179】
更に、制御装置61は、複数の無線基地局62a〜62eの任意の1つ(第1のROD装置)の作動モードを非RODモードに設定する際、第1のROD装置の近傍に位置する無線基地局(第2のROD装置)を、取得された位置情報に基づいて特定する。
【0180】
本例では、制御装置61は、第1のROD装置との間の距離が、予め設定された閾値距離以下であるROD装置を、第1のROD装置の近傍に位置するROD装置として特定する。なお、制御装置61は、第1のROD装置の最も近くに位置するROD装置を、第1のROD装置の近傍に位置するROD装置として特定するように構成されていてもよい。
【0181】
加えて、制御装置61は、特定された第2のROD装置の作動モードも非RODモードに設定する。
【0182】
本例において、RODモードにて作動するROD装置である無線基地局は、RODモードクラスタを構成する。また、非RODモードにて作動するROD装置である無線基地局、及び、非ROD装置である無線基地局は、非RODモードクラスタを構成する。
【0183】
いま、無線端末63a、及び、無線端末63bのそれぞれがROD対応装置であり、且つ、無線端末63cがROD非対応装置である場合を想定する。更に、無線端末63a、及び、無線端末63bのそれぞれが無線基地局62aと無線通信可能であり、且つ、無線端末63cが無線基地局62dと無線通信可能である場合を想定する。加えて、無線基地局62dと、無線基地局62c及び無線基地局62eのそれぞれと、の間の距離が閾値距離以下である場合を想定する。
【0184】
この場合、制御装置61は、無線基地局62a、及び、無線基地局62bのそれぞれの作動モードをRODモードに設定し、且つ、無線基地局62dの作動モードを非RODモードに設定する。更に、制御装置61は、無線基地局62dの作動モードを非RODモードに設定する際、無線基地局62c、及び、無線基地局62eの作動モードも非RODモードに設定する。
【0185】
これによれば、無線基地局62d(第1のROD装置)と無線通信を行っていた無線端末63c(ROD非対応装置)が、移動することにより、無線基地局62c、又は、無線基地局62e(第2のROD装置)と無線通信可能となった場合において、無線端末63cが第2のROD装置と確実に無線通信を行うことができる。
【0186】
<第3実施形態>
次に、本発明の第3実施形態に係るシステムについて説明する。第3実施形態に係るシステムは、上記第1実施形態に係る無線通信システムに対して、複数の無線通信装置を備えるとともに、複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成する点において相違している。従って、以下、かかる相違点を中心として説明する。
【0187】
図14に示したように、第3実施形態に係る無線通信システム3は、複数(本例では、6つ)の無線通信装置71〜76を備える。なお、無線通信システム3は、5つ以下、又は、7つ以上の無線通信装置を備えていてもよい。
【0188】
複数の無線通信装置71〜76は、無線通信可能に構成される。複数の無線通信装置71〜76のそれぞれは、メッシュ型の通信網におけるノードを構成する。無線通信装置71〜76は、それぞれ、ノード#1〜#6とも呼ばれる。
【0189】
本例では、無線通信装置71は、無線通信装置72、及び、無線通信装置73のそれぞれと無線通信可能に接続される。また、無線通信装置74は、無線通信装置72、無線通信装置73、無線通信装置75、及び、無線通信装置76のそれぞれと無線通信可能に接続される。
【0190】
複数の無線通信装置71〜76のそれぞれは、ROD装置、又は、非ROD装置である。本例では、無線通信装置71、無線通信装置72、無線通信装置74、及び、無線通信装置76のそれぞれは、ROD装置である。また、無線通信装置73、及び、無線通信装置75のそれぞれは、非ROD装置である。
【0191】
第3実施形態に係る各ROD装置71,72,74,76は、第1実施形態に係る無線基地局10と同様に、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。また、第3実施形態に係る各非ROD装置73,75は、非RODモードにて作動するように構成される。
【0192】
各ROD装置71,72,74,76は、対応情報を含むRODサポート表を記憶する。1つの対応情報は、無線通信装置71〜76を識別するための無線通信装置識別情報(ノードID)と、ROD情報と、を含む。
【0193】
各ROD装置71,72,74,76は、自ノードと通信網において隣接する(即ち、自ノードと無線通信可能に接続された)ノードである隣接ノードのそれぞれへ通知送信要求を送信する。通知送信要求は、対応可能通知の送信を要求する情報である。対応可能通知は、起動指示信号を送信可能であることを表す情報である。
【0194】
各ROD装置71,72,74,76は、隣接ノードから通知送信要求を受信した場合、対応可能通知を当該隣接ノードへ送信する(対応可能通知送信手段)。一方、非ROD装置73,75は、対応可能通知を送信しない。
【0195】
各ROD装置71,72,74,76は、送信した通知送信要求に応じて、予め設定された待機時間内に、隣接ノードから対応可能通知を受信した場合、当該隣接ノードに対して当該隣接ノードが起動指示信号を送信可能である(ROD装置である)ことを表す対応情報を取得する。
【0196】
一方、各ROD装置71,72,74,76は、送信した通知送信要求に応じて、上記待機時間内に、隣接ノードから対応可能通知を受信しなかった場合、当該隣接ノードに対して当該隣接ノードが起動指示信号を送信不能である(非ROD装置である)ことを表す対応情報を取得する。
【0197】
このようにして、各ROD装置71,72,74,76は、隣接ノードのそれぞれに対して対応情報を取得する(対応情報取得手段)。そして、各ROD装置71,72,74,76は、取得された対応情報を記憶する(RODサポート表を更新する)。
【0198】
なお、各ROD装置71,72,74,76は、対応可能通知を含むHELLOメッセージを送信するように構成されていてもよい。この場合、各ROD装置71,72,74,76は、隣接ノードから受信したHELLOメッセージが対応可能通知を含む場合、当該隣接ノードに対して当該隣接ノードが起動指示信号を送信可能である(ROD装置である)ことを表す対応情報を取得する。
【0199】
各ROD装置71,72,74,76が非RODモードにて作動する場合、当該ROD装置71,72,74,76は、常時、自ノードの状態を起動状態に設定する。
【0200】
また、各ROD装置71,72,74,76がRODモードにて作動する場合、当該ROD装置71,72,74,76は、起動状態とスリープ状態とのいずれかに自ノードの状態を設定する。
【0201】
更に、各ROD装置71,72,74,76がRODモードにて作動する場合、当該ROD装置71,72,74,76は、自ノードの状態が起動状態であり、且つ、予め定められたスリープ条件が成立したとき、自ノードの状態をスリープ状態に設定する。例えば、スリープ条件は、現時点よりも、予め設定された第3の閾値時間だけ前の時点から、現時点までの間に、無線通信が行われていない、という条件である。
【0202】
加えて、各ROD装置71,72,74,76がRODモードにて作動する場合、当該ROD装置71,72,74,76は、自ノードの状態がスリープ状態であり、且つ、隣接ノードから起動指示信号が受信されたとき、自ノードの状態を起動状態に設定する。
【0203】
更に、各ROD装置71,72,74,76は、予め定められた設定タイミングにて(例えば、予め設定された周期が経過する毎に、又は、記憶しているRODサポート表が変更される毎に)、自ノードの作動モードを、RODモード又は非RODモードに設定する。
【0204】
具体的には、各ROD装置71,72,74,76は、自ノードが記憶している、すべての対応情報のそれぞれが、ROD情報として「ROD可」を含む場合(即ち、取得された対応情報が、隣接ノードのすべてがROD装置であることを表す場合)、作動モードをRODモードに設定する。これにより、各ROD装置71,72,74,76は、設定された作動モード(RODモード)にて作動する。
【0205】
一方、各ROD装置71,72,74,76は、自ノードが記憶している対応情報の少なくとも1つが、ROD情報として「ROD不可」を含む場合(即ち、取得された対応情報が、隣接ノードの少なくとも1つが非ROD装置であることを表す場合)、作動モードを非RODモードに設定する。これにより、各ROD装置71,72,74,76は、設定された作動モード(非RODモード)にて作動する。
【0206】
また、各ROD装置71,72,74,76は、起動指示信号を隣接ノードへ送信可能に構成される。一方、非ROD装置73,75のそれぞれは、起動指示信号を送信不能に構成される。
【0207】
従って、第3実施形態に係る無線通信システム3においては、ROD装置71、及び、ROD装置74のそれぞれは、自ノードの作動モードを非RODモードに設定する。また、ROD装置72、及び、ROD装置76のそれぞれは、自ノードの作動モードをRODモードに設定する。
【0208】
このように、第3実施形態に係る無線通信システム3によっても、第1実施形態に係る無線通信システム1と同様の作用及び効果を奏することができる。
【0209】
次に、第3実施形態の第1変形例に係る無線通信システム3について説明する。この第1変形例に係る無線通信システム3は、非ROD装置をROD装置よりも優先して通るように、データを伝送するための経路を決定する。具体的には、無線通信システム3は、ルーティングアルゴリズムを使用する際に、ルーティングメトリクスを決める要素の1つとしてRODサポート表を用いる。
【0210】
従って、例えば、ノード#1とノード#6とを結ぶ経路を決定する場合、無線通信システム3は、ノード#1、ノード#2、ノード#4、及び、ノード#6を通る第1の経路よりも、ノード#1、ノード#3、ノード#4、及び、ノード#6を通る第2の経路を優先して選択する(即ち、データを伝送するための経路として決定する)。
【0211】
ところで、非ROD装置は、常時、状態が起動状態に設定される。一方、ROD装置は、状態がスリープ状態に設定され得る。従って、上記構成によれば、状態がスリープ状態に設定されているROD装置の数を増加させることができる。この結果、無線通信システム3が消費する電力の量が無駄に増加することを回避することができる。
【0212】
また、第3実施形態の第2変形例に係る無線通信システム3について説明する。この第2変形例に係る無線通信システム3は、隣接ノードとして非ROD装置を有するノードを、隣接ノードとして非ROD装置を有しないノードよりも優先して通るように、データを伝送するための経路を決定する。
【0213】
ところで、隣接ノードとして非ROD装置を有するノードは、常時、状態が起動状態に設定される。一方、隣接ノードとして非ROD装置を有しないノードは、状態がスリープ状態に設定され得る。従って、上記構成によれば、状態がスリープ状態に設定されているROD装置の数を増加させることができる。この結果、無線通信システム3が消費する電力の量が無駄に増加することを回避することができる。
【0214】
<第4実施形態>
次に、本発明の第4実施形態に係る通信システムについて図15を参照しながら説明する。
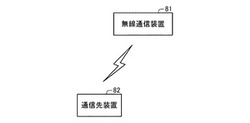
第4実施形態に係る無線通信装置81は、少なくとも1つの通信先装置82と無線通信を実行可能に構成された装置である。
【0215】
更に、この無線通信装置81は、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
【0216】
上記非RODモードは、
上記通信先装置82と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置81の状態を設定するように構成される。
【0217】
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置82と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置81の状態を設定するように構成され、且つ、当該無線通信装置81の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置81の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置81の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置81の状態を当該起動状態に設定するように構成される。
【0218】
これによれば、起動指示信号を送信可能な通信先装置と、起動指示信号を送信不能な通信先装置と、が混在している場合においても、無線通信装置81が消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行することができる。
【0219】
以上、上記実施形態を参照して本願発明を説明したが、本願発明は、上述した実施形態に限定されるものではない。本願発明の構成及び詳細に、本願発明の範囲内において当業者が理解し得る様々な変更をすることができる。
【0220】
なお、上記各実施形態において無線通信システムの各機能は、回路等のハードウェアにより実現されていた。ところで、無線通信装置は、処理装置と、プログラム(ソフトウェア)を記憶する記憶装置と、を備えるとともに、処理装置がそのプログラムを実行することにより、各機能を実現するように構成されていてもよい。この場合、プログラムは、コンピュータが読み取り可能な記録媒体に記憶されていてもよい。例えば、記録媒体は、フレキシブルディスク、光ディスク、光磁気ディスク、及び、半導体メモリ等の可搬性を有する媒体である。
【0221】
また、上記実施形態の他の変形例として、上述した実施形態及び変形例の任意の組み合わせが採用されてもよい。
【0222】
<付記>
上記実施形態の一部又は全部は、以下の付記のように記載され得るが、以下には限られない。
【0223】
(付記1)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置であって、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信装置。
【0224】
これによれば、起動指示信号を送信可能な通信先装置と、起動指示信号を送信不能な通信先装置と、が混在している場合においても、無線通信装置が消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行することができる。
【0225】
(付記2)
付記1に記載の無線通信装置であって、
前記通信先装置のそれぞれに対して、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記取得された対応情報が、前記通信先装置のすべてが前記ROD対応装置であることを表す場合、前記RODモードにて作動するように構成され、一方、当該取得された対応情報が、前記通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記非RODモードにて作動するように構成された無線通信装置。
【0226】
(付記3)
付記1又は付記2に記載の無線通信装置であって、
前記対応情報取得手段は、
前記起動指示信号を送信可能であることを表す対応可能通知の送信を要求する通知送信要求を前記通信先装置のそれぞれへ送信するとともに、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信した場合、当該通信先装置に対して当該通信先装置が前記ROD対応装置であることを表す対応情報を取得し、一方、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信しなかった場合、当該通信先装置に対して当該通信先装置が前記ROD非対応装置であることを表す対応情報を取得するように構成された無線通信装置。
【0227】
これによれば、すべての通信先装置に対する対応情報を確実に取得することができる。
【0228】
(付記4)
付記1乃至付記3のいずれかに記載の無線通信装置であって、
当該無線通信装置の状態が前記起動状態に設定されている場合、予め設定された送信周期が経過する毎に、当該無線通信装置と無線通信可能であることを通知するためのビーコン信号を送信するように構成された無線通信装置。
【0229】
(付記5)
付記4に記載の無線通信装置であって、
前記非RODモードは、
予め定められた第1の省電力条件が成立しない場合、前記送信周期を第1の送信周期に設定し、一方、当該第1の省電力条件が成立する場合、当該送信周期を当該第1の送信周期よりも長い第2の送信周期に設定するように構成された無線通信装置。
【0230】
これによれば、非RODモードにて作動している場合においても、無線通信装置が消費する電力の量を低減することができる。
【0231】
(付記6)
付記1乃至付記5のいずれかに記載の無線通信装置であって、
前記非RODモードは、
予め定められた第2の省電力条件が成立する場合、当該無線通信装置が作動を停止する予定であることを通知するための作動停止通知を送信するとともに、当該無線通信装置への電力の供給を遮断するように構成された無線通信装置。
【0232】
これによれば、非RODモードにて作動している場合においても、無線通信装置が消費する電力の量を低減することができる。
【0233】
(付記7)
付記1乃至付記6のいずれかに記載の無線通信装置であって、
無線基地局である無線通信装置。
【0234】
(付記8)
付記7に記載の無線通信装置であって、
前記通信先装置の少なくとも1つは、無線端末である無線通信装置。
【0235】
(付記9)
付記7又は付記8に記載の無線通信装置であって、
前記通信先装置の少なくとも1つは、前記無線通信装置と前記通信先装置とにより構成される第1の通信網に加えて、当該第1の通信網と異なる第2の通信網を構成する装置である無線通信装置。
【0236】
(付記10)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置に適用され、
前記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させ、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信装置制御方法。
【0237】
(付記11)
付記10に記載の無線通信装置制御方法であって、
前記通信先装置のそれぞれに対して、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記取得された対応情報が、前記通信先装置のすべてが前記ROD対応装置であることを表す場合、前記無線通信装置を前記RODモードにて作動させ、一方、当該取得された対応情報が、前記通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記無線通信装置を前記非RODモードにて作動させるように構成された無線通信装置制御方法。
【0238】
(付記12)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置が実行する無線通信装置制御プログラムであって、
前記無線通信装置に、
前記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させる処理を実行させるとともに、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信装置制御プログラム。
【0239】
(付記13)
付記12に記載の無線通信装置制御プログラムであって、
前記無線通信装置に、
前記通信先装置のそれぞれに対して、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記取得された対応情報が、前記通信先装置のすべてが前記ROD対応装置であることを表す場合、前記無線通信装置を前記RODモードにて作動させ、一方、当該取得された対応情報が、前記通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記無線通信装置を前記非RODモードにて作動させる、処理を実行させるように構成された無線通信装置制御プログラム。
【0240】
(付記14)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備える無線通信システムであって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信システム。
【0241】
(付記15)
付記14に記載の無線通信システムであって、
前記複数の無線通信装置のそれぞれと通信可能に構成された制御装置を備え、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する作動モード設定手段を備える無線通信システム。
【0242】
(付記16)
付記15に記載の無線通信システムであって、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記作動モード設定手段は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定するように構成された無線通信システム。
【0243】
(付記17)
付記16に記載の無線通信システムであって、
前記作動モード設定手段は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、当該ROD装置に対して前記取得された対応情報が、当該ROD装置と無線通信可能な通信先装置のすべてが前記ROD対応装置であることを表す場合、前記RODモードに設定し、一方、当該対応情報が、当該ROD装置と無線通信可能な通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記非RODモードに設定するように構成された無線通信システム。
【0244】
(付記18)
付記17に記載の無線通信システムであって、
前記作動モード設定手段は、
前記ROD非対応装置と無線通信可能な無線通信装置が、第1の無線通信装置から第2の無線通信装置へ変化する場合において、当該第2の無線通信装置が前記ROD装置であるとき、当該ROD装置の前記作動モードを前記非RODモードに設定し、且つ、当該第1の無線通信装置が前記ROD装置であるとき、当該ROD装置の前記作動モードを前記RODモードに設定するように構成された無線通信システム。
【0245】
これによれば、例えば、ROD非対応装置が移動することにより、第2の無線通信装置と無線通信可能となった場合において、当該ROD非対応装置が当該第2の無線通信装置と確実に無線通信を行うことができる。更に、第1の無線通信装置が消費する電力の量を低減することもできる。
【0246】
(付記19)
付記17又は付記18に記載の無線通信システムであって、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの位置を表す位置情報を取得する位置情報取得手段を備え、
前記作動モード設定手段は、
第1のROD装置としての前記ROD装置の前記作動モードを前記非RODモードに設定する際、当該第1のROD装置の近傍に位置する前記ROD装置である第2のROD装置を、前記取得された位置情報に基づいて特定し、当該特定された第2のROD装置の前記作動モードも前記非RODモードに設定するように構成された無線通信システム。
【0247】
これによれば、例えば、第1のROD装置と無線通信を行っていたROD非対応装置が、移動することにより、第2のROD装置と無線通信可能となった場合において、当該ROD非対応装置が当該第2のROD装置と確実に無線通信を行うことができる。
【0248】
(付記20)
付記16に記載の無線通信システムであって、
前記作動モード設定手段は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報が、前記ROD装置のいずれかと無線通信可能な通信先装置のすべてが前記ROD対応装置であることを表す場合、前記RODモードに設定し、一方、当該対応情報が、前記ROD装置のいずれかと無線通信可能な通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記非RODモードに設定するように構成された無線通信システム。
【0249】
これによれば、ROD非対応装置が、いずれのROD装置と無線通信可能となった場合においても、当該ROD装置と確実に無線通信を行うことができる。
【0250】
(付記21)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備える無線通信システムに適用され、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置を、RODモード、及び、非RODモードのいずれかの作動モードにて作動させ、
前記非ROD装置を、非RODモードにて作動させ、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信システム制御方法。
【0251】
(付記22)
付記21に記載の無線通信システム制御方法であって、
前記無線通信システムは、前記複数の無線通信装置のそれぞれと通信可能に構成された制御装置を備え、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定するように構成された無線通信システム制御方法。
【0252】
(付記23)
付記22に記載の無線通信システム制御方法であって、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定するように構成された無線通信システム制御方法。
【0253】
(付記24)
少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置であって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する作動モード設定手段を備える制御装置。
【0254】
(付記25)
付記24に記載の制御装置であって、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記作動モード設定手段は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定するように構成された制御装置。
【0255】
(付記26)
少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置に適用され、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する、制御装置制御方法。
【0256】
(付記27)
付記26に記載の制御装置制御方法であって、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定するように構成された制御装置制御方法。
【0257】
(付記28)
少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置が実行する制御装置制御プログラムであって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
前記制御装置に、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する処理を実行させるための制御装置制御プログラム。
【0258】
(付記29)
付記28に記載の制御装置制御プログラムであって、
前記制御装置に、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定する、処理を実行させるための制御装置制御プログラム。
【0259】
(付記30)
無線通信可能に構成された無線通信装置を複数備える無線通信システムであって、
前記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成し、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
自ノードと前記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信システム。
【0260】
(付記31)
付記30に記載の無線通信システムであって、
前記ROD装置のそれぞれは、前記起動指示信号を送信可能に構成され、
前記非ROD装置のそれぞれは、前記起動指示信号を送信不能に構成され、
前記ROD装置のそれぞれは、
自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記ROD装置、及び、前記非ROD装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記RODモードにて作動するように構成され、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記非RODモードにて作動するように構成された無線通信システム。
【0261】
(付記32)
付記30又は付記31に記載の無線通信システムであって、
前記対応情報取得手段は、
前記起動指示信号を送信可能であることを表す対応可能通知の送信を要求する通知送信要求を前記隣接ノードのそれぞれへ送信するとともに、当該送信された通知送信要求に応じて当該隣接ノードから当該対応可能通知を受信した場合、当該隣接ノードに対して当該隣接ノードが前記ROD装置であることを表す対応情報を取得し、一方、当該送信された通知送信要求に応じて当該隣接ノードから当該対応可能通知を受信しなかった場合、当該隣接ノードに対して当該隣接ノードが前記非ROD装置であることを表す対応情報を取得するように構成され、
前記ROD装置のそれぞれは、
前記隣接ノードから前記通知送信要求を受信した場合、前記対応可能通知を当該隣接ノードへ送信する対応可能通知送信手段を備える無線通信システム。
【0262】
(付記33)
付記30乃至付記32のいずれかに記載の無線通信システムであって、
前記非ROD装置を前記ROD装置よりも優先して通るように、データを伝送するための経路を決定する無線通信システム。
【0263】
非ROD装置は、常時、状態が起動状態に設定される。一方、ROD装置は、状態がスリープ状態に設定され得る。従って、上記構成によれば、状態がスリープ状態に設定されているROD装置の数を増加させることができる。この結果、無線通信システムが消費する電力の量が無駄に増加することを回避することができる。
【0264】
(付記34)
付記30乃至付記33のいずれかに記載の無線通信システムであって、
前記隣接ノードとして前記非ROD装置を有するノードを、前記隣接ノードとして前記非ROD装置を有しないノードよりも優先して通るように、前記データを伝送するための経路を決定する無線通信システム。
【0265】
隣接ノードとして非ROD装置を有するノードは、常時、状態が起動状態に設定される。一方、隣接ノードとして非ROD装置を有しないノードは、状態がスリープ状態に設定され得る。従って、上記構成によれば、状態がスリープ状態に設定されているROD装置の数を増加させることができる。この結果、無線通信システムが消費する電力の量が無駄に増加することを回避することができる。
【0266】
(付記35)
無線通信可能に構成された無線通信装置を複数備える無線通信システムに適用され、
前記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成し、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置を、RODモード、及び、非RODモードのいずれかの作動モードにて作動させ、
前記非ROD装置を、非RODモードにて作動させ、
前記非RODモードは、
自ノードと前記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信システム制御方法。
【0267】
(付記36)
付記35に記載の無線通信システム制御方法であって、
前記ROD装置のそれぞれは、前記起動指示信号を送信可能に構成され、
前記非ROD装置のそれぞれは、前記起動指示信号を送信不能に構成され、
前記ROD装置のそれぞれが、自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記ROD装置、及び、前記非ROD装置、のいずれであるかを表す対応情報を取得し、
前記ROD装置のそれぞれが、前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記RODモードにて作動し、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記非RODモードにて作動する、無線通信システム制御方法。
【0268】
(付記37)
メッシュ型の通信網におけるノードを構成し、自ノードと前記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置であって、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非RODモードは、
前記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信装置。
【0269】
(付記38)
付記37に記載の無線通信装置であって、
前記起動指示信号を送信可能に構成され、
自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記起動指示信号を送信可能なROD装置、及び、前記起動指示信号を送信不能な非ROD装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記RODモードにて作動するように構成され、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記非RODモードにて作動するように構成された無線通信装置。
【0270】
(付記39)
メッシュ型の通信網におけるノードを構成し、自ノードと前記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置に適用され、
前記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させ、
前記非RODモードは、
前記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信装置制御方法。
【0271】
(付記40)
付記39に記載の無線通信装置制御方法であって、
前記無線通信装置が、前記起動指示信号を送信し、
自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記起動指示信号を送信可能なROD装置、及び、前記起動指示信号を送信不能な非ROD装置、のいずれであるかを表す対応情報を取得し、
前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記無線通信装置を前記RODモードにて作動させ、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記無線通信装置を前記非RODモードにて作動させるように構成された無線通信装置制御方法。
【0272】
(付記41)
メッシュ型の通信網におけるノードを構成し、自ノードと前記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置が実行する無線通信装置制御プログラムであって、
前記無線通信装置に、
前記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させる処理を実行させるとともに、
前記非RODモードは、
前記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信装置制御プログラム。
【0273】
(付記42)
付記41に記載の無線通信装置制御プログラムであって、
前記無線通信装置に、
前記起動指示信号を送信し、
自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記起動指示信号を送信可能なROD装置、及び、前記起動指示信号を送信不能な非ROD装置、のいずれであるかを表す対応情報を取得し、
前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記無線通信装置を前記RODモードにて作動させ、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記無線通信装置を前記非RODモードにて作動させる、処理を実行させるように構成された無線通信装置制御プログラム。
【産業上の利用可能性】
【0274】
本発明は、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置等に適用可能である。
【符号の説明】
【0275】
1 無線通信システム
10 無線基地局
11 第1の通信制御部
12 第2の通信制御部
13 起動指示信号受信部
14 パケット転送部
15 状態制御部
151 RODサポート表記憶部
16 電力供給部
1A 無線通信システム
2 無線通信システム
20,30 無線端末
2A 無線通信システム
2C 無線通信システム
3 無線通信システム
40 通信端末
51 ホームゲートウェイ
52 テレビ
53 携帯ゲーム機
54 ルータ
55 火災報知器
56 ガス漏れ検知器
61 制御装置
61a RODサポート表受信部
61b 作動モード決定部
61c 作動モード設定情報送信部
62a〜62e 無線基地局
63a,63b,63c 無線端末
71〜76 無線通信装置
81 無線通信装置
82 通信先装置
NW 通信網
NW1 第1の通信網
NW2 第2の通信網
NW3 通信網
NWW インターネット網
【技術分野】
【0001】
本発明は、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置に関する。
【背景技術】
【0002】
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置が知られている。この種の無線通信装置の一つとして、特許文献1に記載の無線通信装置は、通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に状態が設定される。通信先装置は、第1の通信方式に従った無線通信を無線通信装置と行う。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2009−124461号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上記無線通信装置は、通信先装置が無線通信可能な領域内に存在しない場合であっても、状態が起動状態に設定され続ける。従って、無線通信装置が消費する電力の量が無駄に過大となるという問題があった。
【0005】
そこで、予め定められたスリープ条件が成立したとき、上記無線通信装置の状態をスリープ状態に設定するように無線通信装置を構成することが好適であると考えられる。ここで、スリープ状態は、信号を受信するために必要とされる電力が第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり、且つ、通信先装置と第1の通信方式に従った無線通信を実行不能な状態である。
【0006】
ところで、一般に、伝送レートが小さい通信方式ほど、その通信方式に従った信号を受信するために必要とされる電力も小さい。ここで、伝送レートは、単位時間あたりに伝送されるデータの量である。従って、第2の通信方式は、第1の通信方式よりも伝送レートが小さい通信方式である。
【0007】
この場合、通信先装置は、起動指示信号を無線通信装置へ送信する。無線通信装置は、起動指示信号を受信すると、無線通信装置の状態を起動状態に設定する。その後、通信先装置は、無線通信装置と通信する。これによれば、無線通信装置が消費する電力の量を低減することができる。
【0008】
しかしながら、通信先装置が、起動指示信号を送信不能な装置である場合、この通信先装置は、無線通信装置と通信を行うことができない虞がある。即ち、上記のように構成された無線通信装置によれば、無線通信装置が消費する電力の量を低減し、且つ、通信先装置と無線通信を確実に実行できない虞があった。
【0009】
このため、本発明の目的は、上述した課題である「無線通信装置が消費する電力の量を低減した場合に、通信先装置と無線通信を確実に実行できない場合が生じること」を解決することが可能な無線通信装置を提供することにある。
【課題を解決するための手段】
【0010】
かかる目的を達成するため本発明の一形態である無線通信装置は、少なくとも1つの通信先装置と無線通信を実行可能に構成された装置である。
【0011】
更に、この無線通信装置は、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0012】
また、本発明の他の形態である無線通信装置制御方法は、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置に適用され、
上記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させ、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0013】
また、本発明の他の形態である無線通信装置制御プログラムは、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置が実行するプログラムである。
【0014】
更に、この無線通信装置制御プログラムは、
上記無線通信装置に、
上記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させる処理を実行させるとともに、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0015】
また、本発明の他の形態である無線通信システムは、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備えるシステムである。
【0016】
更に、上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
上記非ROD装置は、非RODモードにて作動するように構成され、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0017】
また、本発明の他の形態である無線通信システム制御方法は、
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備える無線通信システムに適用される。
上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記無線通信システム制御方法は、
上記ROD装置を、RODモード、及び、非RODモードのいずれかの作動モードにて作動させ、
上記非ROD装置を、非RODモードにて作動させ、
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
【0018】
また、本発明の他の形態である制御装置は、少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された装置である。
【0019】
更に、上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
上記非ROD装置は、非RODモードにて作動するように構成される。
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
上記制御装置は、
上記複数の無線通信装置のうちの上記ROD装置のそれぞれの上記作動モードを設定する作動モード設定手段を備える。
【0020】
また、本発明の他の形態である制御装置制御方法は、少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置に適用される。
上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
上記非ROD装置は、非RODモードにて作動するように構成される。
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
上記制御装置制御方法は、
上記制御装置が、上記複数の無線通信装置のうちの上記ROD装置のそれぞれの上記作動モードを設定する方法である。
【0021】
また、本発明の他の形態である制御装置制御プログラムは、少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置が実行するプログラムである。
【0022】
更に、上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
上記非ROD装置は、非RODモードにて作動するように構成される。
上記非RODモードは、
上記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成される。
上記制御装置制御プログラムは、
上記制御装置に、
上記複数の無線通信装置のうちの上記ROD装置のそれぞれの上記作動モードを設定する処理を実行させるためのプログラムである。
【0023】
また、本発明の他の形態である無線通信システムは、無線通信可能に構成された無線通信装置を複数備えるシステムである。
【0024】
更に、上記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成する。
上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
上記非ROD装置は、非RODモードにて作動するように構成される。
上記非RODモードは、
自ノードと上記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【0025】
また、本発明の他の形態である無線通信システム制御方法は、無線通信可能に構成された無線通信装置を複数備える無線通信システムに適用される。
上記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成する。
上記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置である。
上記無線通信システム制御方法は、
上記ROD装置を、RODモード、及び、非RODモードのいずれかの作動モードにて作動させ、
上記非ROD装置を、非RODモードにて作動させ、
上記非RODモードは、
自ノードと上記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【0026】
また、本発明の他の形態である無線通信装置は、メッシュ型の通信網におけるノードを構成し、自ノードと上記通信網において隣接するノードである隣接ノードと無線通信可能に構成された装置である。
【0027】
更に、この無線通信装置は、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
上記非RODモードは、
上記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【0028】
また、本発明の他の形態である無線通信装置制御方法は、
メッシュ型の通信網におけるノードを構成し、自ノードと上記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置に適用され、
上記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させ、
上記非RODモードは、
上記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【0029】
また、本発明の他の形態である無線通信装置制御プログラムは、メッシュ型の通信網におけるノードを構成し、自ノードと上記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置が実行するプログラムである。
【0030】
更に、この無線通信装置制御プログラムは、
上記無線通信装置に、
上記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させる処理を実行させるとともに、
上記非RODモードは、
上記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに上記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成される。
【発明の効果】
【0031】
本発明は、以上のように構成されることにより、消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行することができる。
【図面の簡単な説明】
【0032】
【図1】本発明の第1実施形態に係る無線通信システムの概略構成を表す図である。
【図2】本発明の第1実施形態に係る無線基地局の構成を表すブロック図である。
【図3】本発明の第1実施形態に係る無線基地局が記憶するRODサポート表を表すテーブルである。
【図4】本発明の第1実施形態に係る無線基地局が実行する接続処理を表すフローチャートである。
【図5】本発明の第1実施形態に係る無線通信システムの作動を表すシーケンス図である。
【図6】本発明の第1実施形態に係る無線通信システムの作動を表すシーケンス図である。
【図7】本発明の第1実施形態に係る無線基地局が実行する設定処理を表すフローチャートである。
【図8】無線端末数と平均通信網収束時間との関係を示したグラフである。
【図9】本発明の第1実施形態の第1変形例に係る無線通信システムの概略構成を表す図である。
【図10】本発明の第2実施形態に係る無線通信システムの概略構成を表す図である。
【図11】本発明の第2実施形態に係る制御装置の構成を表すブロック図である。
【図12】本発明の第2実施形態の第2変形例に係る無線通信システムの概略構成を表す図である。
【図13】本発明の第2実施形態の第3変形例に係る無線通信システムの概略構成を表す図である。
【図14】本発明の第3実施形態に係る無線通信システムの概略構成を表す図である。
【図15】本発明の第4実施形態に係る無線通信装置の概略構成を表す図である。
【発明を実施するための形態】
【0033】
以下、本発明に係る、無線通信装置、無線通信装置制御方法、無線通信装置制御プログラム、無線通信システム、無線通信システム制御方法、制御装置、制御装置制御方法、及び、制御装置制御プログラム、の各実施形態について図1〜図15を参照しながら説明する。
【0034】
<第1実施形態>
(構成)
図1に示したように、第1実施形態に係る無線通信システム1は、無線基地局10と、ROD(Radio on Demand)無線端末20と、非ROD無線端末30と、通信端末40と、を備える。
【0035】
本例では、無線基地局10、ROD無線端末20、及び、非ROD無線端末30は、無線LAN(Local Area Network)(例えば、IEEE802.11a、IEEE802.11b、IEEE802.11g、IEEE802.11j、又は、IEEE802.11n等)を構成する。
【0036】
なお、無線基地局10、ROD無線端末20、及び、非ROD無線端末30は、移動体通信網、近距離無線通信網(例えば、Bluetooth(登録商標)、及び、ZigBee(登録商標)等)、WiMAX、IEEE802.11ahにより定められる通信網、IEEE1900.6により定められる通信網等を構成していてもよい。
【0037】
また、無線基地局10は、基地局、Access Point、Base Station、又は、Node Bとも呼ばれる。また、ROD無線端末20、及び、非ROD無線端末30のそれぞれは、無線端末、又は、Stationとも呼ばれる。
【0038】
例えば、無線端末20,30は、パーソナル・コンピュータ、携帯電話端末、PHS(Personal Handyphone System)、PDA(Personal Data Assistance、Personal Digital Assistant)、スマートフォン、カーナビゲーション端末、又は、ゲーム端末等である。
【0039】
無線基地局10と通信端末40とは、通信網(本例では、基幹通信網)NWを介して互いに通信可能に接続されている。
ROD無線端末20、及び、非ROD無線端末30のそれぞれは、無線基地局10と無線通信を行うことにより、無線基地局10を介して通信端末40と通信を行う(例えば、通信パケットを送受信する)。
【0040】
本例では、ROD無線端末20は、第1のユーザにより携帯されている。従って、ROD無線端末20は、第1のユーザの移動に伴って移動する。同様に、非ROD無線端末30は、第2のユーザにより携帯されている。従って、非ROD無線端末30は、第2のユーザの移動に伴って移動する。
【0041】
なお、無線通信システム1は、複数のROD無線端末20を備えていてもよい。また、無線通信システム1は、複数の非ROD無線端末30を備えていてもよい。
【0042】
無線基地局10は、ROD無線端末20、及び、非ROD無線端末30のそれぞれと無線通信を実行可能に構成される。具体的には、無線基地局10は、無線基地局10との間の距離が所定の閾値距離よりも短い無線端末20,30と無線通信を実行可能に構成される。
【0043】
ROD無線端末20は、予め定められた起動指示(ウェイクアップ)信号を送信可能に構成される。非ROD無線端末30は、起動指示信号を送信不能に構成される。
なお、無線基地局10は、無線通信装置を構成している。また、ROD無線端末20、及び、非ROD無線端末30のそれぞれは、通信先装置を構成している。
【0044】
より具体的に述べると、図2に示したように、無線基地局10は、第1の通信制御部11と、第2の通信制御部12と、起動指示信号受信部13と、パケット転送部14と、状態制御部(対応情報取得手段)15と、電力供給部16と、を備える。
【0045】
第1の通信制御部11は、第1の通信方式に従った無線通信を実行するように構成される。本例では、第1の通信方式は、DSSS(Direct Sequence Spread Spectrum)、CCK(Complementary Code Keying)、又は、OFDM(Orthogonal Frequency Division Multiplexing)等である。
【0046】
本例では、第1の通信方式は、周波数帯域として、2.4GHz帯、又は、5GHz帯を用いる。
第1の通信制御部11は、無線端末20,30のそれぞれと無線通信を実行する。
【0047】
更に、第1の通信制御部11は、予め設定された送信周期が経過する毎に、無線基地局10と無線通信可能であることを通知するためのビーコン信号(Beaconフレーム)を送信する。本例では、ビーコン信号は、無線基地局10を識別するための識別子(例えば、ESSID(Extended Service Set Identifier)、又は、BSSID(Basic Service Set Identifier)等)を含む。
【0048】
第2の通信制御部12は、有線通信(通信ケーブルを介した通信)を実行するように構成される。第2の通信制御部12は、通信網NWを介して通信端末40と通信を実行する。
【0049】
なお、無線基地局10は、2つの通信制御部(第1の通信制御部11、及び、第2の通信制御部12)を備えるが、3つ以上の通信制御部を備えていてもよい。
【0050】
起動指示信号受信部13は、第2の通信方式に従った起動指示信号を受信するように構成される。第2の通信方式は、信号を受信するために必要とされる電力が第1の通信方式よりも小さい通信方式である。
【0051】
本例では、第2の通信方式は、OOK(On Off Keying)、ASK(Amplitude Shift Keying)、又は、FSK(Frequency Shift Keying)等である。本例では、第2の通信方式は、周波数帯域として、第1の通信方式と同じ周波数帯域を用いる。
【0052】
パケット転送部14は、第1の通信制御部11を介して受信されたパケットを第2の通信制御部12を介して送信するように構成される。更に、パケット転送部14は、第2の通信制御部12を介して受信されたパケットを第1の通信制御部11を介して送信するように構成される。
【0053】
また、パケット転送部14は、第1の通信制御部11を介して、後述する対応可能通知が受信された場合、受信された対応可能通知を状態制御部15へ出力する。
【0054】
状態制御部15は、RODサポート表記憶部151を有する。RODサポート表記憶部151は、図3に示したように、対応情報を含むRODサポート表を記憶する。1つの対応情報は、無線端末を識別するための無線端末識別情報と、ROD情報と、を含む。
【0055】
ROD情報は、起動指示信号を送信可能であるか否かを表す情報である。本例では、ROD情報としての「ROD可」は、起動指示信号を送信可能である旨を表す。更に、ROD情報としての「ROD不可」は、起動指示信号を送信不能である旨を表す。
【0056】
状態制御部15は、第1の通信制御部11を介して、無線端末20,30のそれぞれへ通知送信要求を送信する。通知送信要求は、対応可能通知の送信を要求する情報である。対応可能通知は、起動指示信号を送信可能であることを表す情報である。
【0057】
ROD無線端末20は、無線基地局10から通知送信要求を受信した場合、対応可能通知を無線基地局10へ送信する。一方、非ROD無線端末30は、対応可能通知を送信しない。
【0058】
状態制御部15は、送信した通知送信要求に応じて、予め設定された待機時間内に、無線端末20,30から対応可能通知をパケット転送部14を介して受信した場合、当該無線端末20,30に対して当該無線端末20,30が起動指示信号を送信可能である(ROD対応装置である)ことを表す対応情報を取得する。
【0059】
一方、状態制御部15は、送信した通知送信要求に応じて、上記待機時間内に、無線端末20,30から対応可能通知を受信しなかった場合、当該無線端末20,30に対して当該無線端末20,30が起動指示信号を送信不能である(ROD非対応装置である)ことを表す対応情報を取得する。
【0060】
このようにして、状態制御部15は、無線端末20,30のそれぞれに対して対応情報を取得する。そして、状態制御部15は、取得された対応情報をRODサポート表記憶部151に記憶させる。
【0061】
電力供給部16は、第1の通信制御部11、第2の通信制御部12、起動指示信号受信部13、パケット転送部14、及び、状態制御部15のそれぞれへ、電力供給線を介して電力を供給可能に構成される。電力供給部16は、第1の通信制御部11へ電力を供給する電力供給状態と、第1の通信制御部11への電力の供給を中止する電力遮断状態と、に状態が切り替わるように構成されている。
【0062】
なお、電力供給部16の状態が電力供給状態に設定されることは、無線基地局10の状態が起動状態に設定されることに対応している。更に、電力供給部16の状態が電力遮断状態に設定されることは、無線基地局10の状態がスリープ状態に設定されることに対応している。
【0063】
更に、無線基地局10は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
【0064】
無線基地局10が非RODモードにて作動する場合、無線基地局10は、常時、無線基地局10の状態を起動状態に設定する。更に、無線基地局10が非RODモードにて作動する場合、無線基地局10は、予め定められた第1の省電力条件が成立しない場合、送信周期を第1の送信周期に設定し、一方、第1の省電力条件が成立する場合、送信周期を第1の送信周期よりも長い第2の送信周期に設定する。
【0065】
例えば、第1の省電力条件は、現時点よりも、予め設定された第1の閾値時間だけ前の時点から、現時点までの間に、無線通信が行われていない、という条件である。
【0066】
無線基地局10が非RODモードにて作動する場合、無線基地局10は、予め定められた第2の省電力条件が成立する場合、作動停止通知を送信するとともに、無線基地局10への電力の供給を遮断する。
【0067】
ここで、作動停止通知は、無線基地局10が作動を停止する予定であることを通知するための情報である。また、第2の省電力条件は、現時点よりも、予め設定された第2の閾値時間だけ前の時点から、現時点までの間に、無線通信が行われていない、という条件である。例えば、第2の閾値時間は、第1の閾値時間よりも長いことが好適である。
例えば、無線基地局10は、IEEE802.11v(BSS Transition Management)により定められた方法を用いてもよい。
【0068】
また、無線基地局10がRODモードにて作動する場合、無線基地局10は、起動状態とスリープ状態とのいずれかに無線基地局10の状態を設定する。
【0069】
更に、無線基地局10がRODモードにて作動する場合、無線基地局10は、無線基地局10の状態が起動状態であり、且つ、予め定められたスリープ条件が成立したとき、無線基地局10の状態をスリープ状態に設定する。例えば、スリープ条件は、現時点よりも、予め設定された第3の閾値時間だけ前の時点から、現時点までの間に、無線通信が行われていない、という条件である。
【0070】
加えて、無線基地局10がRODモードにて作動する場合、無線基地局10は、無線基地局10の状態がスリープ状態であり、且つ、起動指示信号が受信されたとき、無線基地局10の状態を起動状態に設定する。
【0071】
状態制御部15は、予め定められた設定タイミングにて(例えば、予め設定された周期が経過する毎に、又は、RODサポート表記憶部151に記憶されているRODサポート表が変更される毎に)、作動モードを、RODモード又は非RODモードに設定する。
【0072】
具体的には、状態制御部15は、RODサポート表記憶部151に記憶されている、すべての対応情報のそれぞれが、ROD情報として「ROD可」を含む場合(即ち、取得された対応情報が、無線端末20,30のすべてがROD対応装置であることを表す場合)、作動モードをRODモードに設定する。これにより、無線基地局10は、設定された作動モード(RODモード)にて作動する。
【0073】
一方、状態制御部15は、RODサポート表記憶部151に記憶されている対応情報の少なくとも1つが、ROD情報として「ROD不可」を含む場合(即ち、取得された対応情報が、無線端末20,30の少なくとも1つがROD非対応装置であることを表す場合)、作動モードを非RODモードに設定する。これにより、無線基地局10は、設定された作動モード(非RODモード)にて作動する。
【0074】
(作動)
次に、上述した無線通信システム1の作動について説明する。
無線基地局10は、無線基地局10の状態が起動状態に設定されている場合、図4にフローチャートにより示した接続処理を、送信周期が経過する毎に実行するようになっている。
【0075】
具体的には、無線基地局10は、接続処理の実行を開始すると、ビーコン信号を送信する(ステップS101)。このビーコン信号は、RODサポート情報を含む。RODサポート情報は、ROD機能をサポートする旨を表す情報である。ROD機能は、RODモードにて無線基地局10を作動可能な機能である。
【0076】
なお、無線基地局10は、無線端末20,30から探査要求(Probe Requestフレーム)を受信した場合、当該無線端末20,30へ探査応答(Probe Responseフレーム)を送信し、その後、ステップS102〜ステップS111の処理を実行する接続処理も実行するようになっている。探査応答も、RODサポート情報を含む。
【0077】
一方、ROD無線端末20は、無線基地局10からビーコン信号を受信する。ROD無線端末20は、受信したビーコン信号がRODサポート情報を含む場合、対応可能通知を含む接続要求(Association Requestフレーム)を無線基地局10へ送信する。
【0078】
なお、ROD無線端末20は、受信したビーコン信号がRODサポート情報を含まない場合、対応可能通知を含まない接続要求を送信する。また、ROD無線端末20は、受信したビーコン信号がRODサポート情報を含む場合であっても、対応可能通知を含まない接続要求を送信するように構成されていてもよい。
【0079】
また、非ROD無線端末30は、無線基地局10からビーコン信号を受信する。非ROD無線端末30は、受信したビーコン信号がRODサポート情報を含むか否かにかかわらず、対応可能通知を含まない接続要求を無線基地局10へ送信する。
【0080】
先ず、無線基地局10がROD無線端末20から対応可能通知を含む接続要求を受信した場合について説明する。
【0081】
この場合、無線基地局10は、ステップS102にて接続要求を受信したか否かを判定すると、「Yes」と判定してステップS103へ進む。そして、無線基地局10は、接続要求を送信してきた無線端末(ROD無線端末20)と、無線基地局10と、の間で接続が既に確立されている(接続が確立済みである)か否かを判定する。
【0082】
この時点では、無線基地局10とROD無線端末20との間で接続が確立されていないので、無線基地局10は、「No」と判定してステップS104へ進む。そして、無線基地局10は、接続要求を送信してきた無線端末(ROD無線端末20)がROD対応装置である(接続要求に対応可能通知が含まれている)か否かを判定する。
【0083】
従って、無線基地局10は、「Yes」と判定してステップS105へ進み、接続要求を送信してきた無線端末(ROD無線端末20)を識別するための無線端末識別情報と、「ROD可」であるROD情報と、を含む対応情報を新たに記憶する(即ち、RODサポート表に追加する)。
【0084】
その後、無線基地局10は、接続応答(Association Responseフレーム)を、接続要求を送信してきた無線端末(ROD無線端末20)へ送信する(ステップS106)。その後、無線基地局10は、図4に示した接続処理の実行を終了する。
【0085】
次に、無線基地局10がROD無線端末20から対応可能通知を含まない接続要求を受信した場合について説明する。図5は、この場合における、無線基地局10及びROD無線端末20の作動の概要を示したシーケンス図である。
【0086】
この場合、上述した場合と同様に、無線基地局10は、ビーコン信号を送信する(図4のステップS101、及び、図5のステップS201)。
【0087】
そして、ROD無線端末20は、対応可能通知を含まない接続要求を無線基地局10へ送信する(図5のステップS202)。従って、無線基地局10は、ステップS104に進んだとき、「No」と判定してステップS107へ進む。
【0088】
そして、無線基地局10は、接続要求を送信してきた無線端末(ROD無線端末20)へ、通知送信要求を送信する(図5のステップS203)。
【0089】
一方、ROD無線端末20は、無線基地局10から通知送信要求を受信する。ROD無線端末20は、通知送信要求を受信した場合、対応可否通知としての対応可能通知を無線基地局10へ送信する(図5のステップS204)。
【0090】
ここで、対応可否通知は、対応可能通知、又は、対応不能通知である。対応不能通知は、起動指示信号を送信不能であることを表す情報である。これにより、無線基地局10は、ROD無線端末20から対応可否通知を受信する。
【0091】
従って、無線基地局10は、ステップS108にて、通知送信要求を送信してから待機時間が経過するまでの間に対応可否通知を受信したか否かを判定すると、「Yes」と判定してステップS109へ進む。そして、無線基地局10は、接続要求を送信してきた無線端末(ROD無線端末20)がROD対応装置である(通知送信要求に応じて対応可能通知が受信された)か否かを判定する。
【0092】
従って、無線基地局10は、「Yes」と判定してステップS110へ進み、接続要求を送信してきた無線端末(ROD無線端末20)を識別するための無線端末識別情報と、「ROD可」であるROD情報と、を含む対応情報を新たに記憶する(図5のステップS205)。
【0093】
その後、無線基地局10は、接続応答を、接続要求を送信してきた無線端末(ROD無線端末20)へ送信する(ステップS106)。その後、無線基地局10は、図4に示した接続処理の実行を終了する。
【0094】
次に、無線基地局10が非ROD無線端末30から対応可能通知を含まない接続要求を受信した場合について説明する。図6は、この場合における、無線基地局10及び非ROD無線端末30の作動の概要を示したシーケンス図である。
【0095】
この場合、上述した場合と同様に、無線基地局10は、ビーコン信号を送信する(図4のステップS101、及び、図6のステップS301)。
【0096】
そして、非ROD無線端末30は、対応可能通知を含まない接続要求を無線基地局10へ送信する(図6のステップS302)。従って、無線基地局10は、ステップS104に進んだとき、「No」と判定してステップS107へ進む。
【0097】
そして、無線基地局10は、接続要求を送信してきた無線端末(非ROD無線端末30)へ、通知送信要求を送信する(図6のステップS303)。
【0098】
一方、非ROD無線端末30は、無線基地局10から通知送信要求を受信する。非ROD無線端末30は、通知送信要求を受信した場合であっても、対応可否通知を送信しない。なお、非ROD無線端末30は、通知送信要求を受信した場合、対応可否通知としての対応不能通知を無線基地局10へ送信するように構成されていてもよい。
【0099】
従って、無線基地局10は、ステップS108にて、通知送信要求を送信してから待機時間が経過するまでの間に対応可否通知を受信したか否かを判定すると、「No」と判定してステップS111へ進む。
【0100】
そして、無線基地局10は、接続要求を送信してきた無線端末(非ROD無線端末30)を識別するための無線端末識別情報と、「ROD不可」であるROD情報と、を含む対応情報を新たに記憶する(図6のステップS304)。
【0101】
その後、無線基地局10は、接続応答を、接続要求を送信してきた無線端末(非ROD無線端末30)へ送信する(ステップS106)。その後、無線基地局10は、図4に示した接続処理の実行を終了する。
【0102】
なお、無線基地局10は、非ROD無線端末30から対応可否通知としての対応不能通知を受信した場合、ステップS108にて「Yes」と判定し、ステップS109にて「No」と判定してステップS111へ進む。この場合も、無線基地局10は、接続要求を送信してきた無線端末(非ROD無線端末30)を識別するための無線端末識別情報と、「ROD不可」であるROD情報と、を含む対応情報を新たに記憶する。
【0103】
また、接続要求を送信してきた無線端末と無線基地局10との間で既に接続が確立されている場合、無線基地局10は、ステップS103にて「Yes」と判定して、図4に示した接続処理の実行を終了する。
【0104】
また、ビーコン信号を送信してから、予め設定されたタイムアウト時間が経過するまでに、接続要求が受信されなかった場合、無線基地局10は、ステップS102にて「No」と判定して、図4に示した接続処理の実行を終了する。
【0105】
更に、無線基地局10の状態が起動状態に設定されている場合において、図7にフローチャートにより示した設定処理を、設定タイミングにて(本例では、RODサポート表記憶部151に記憶されているRODサポート表が変更される毎に)、実行するようになっている。
【0106】
具体的には、無線基地局10は、設定処理の実行を開始すると、RODサポート表記憶部151に記憶されているRODサポート表を走査する(即ち、RODサポート表記憶部151に記憶されている対応情報を取得する)(ステップS401)。
【0107】
そして、無線基地局10は、無線基地局10と無線通信を実行可能な(即ち、接続要求を送信してきた)無線端末のすべてが、起動指示信号を送信可能であるか否かを判定する。即ち、無線基地局10は、RODサポート表に含まれる対応情報のすべてが、ROD情報として「ROD可」を含むか否かを判定する。
【0108】
いま、ROD無線端末20及び非ROD無線端末30の両方が、無線基地局10へ接続要求を送信した場合を想定する。この場合、RODサポート表に含まれる対応情報は、ROD情報として「ROD可」を含む第1の対応情報と、ROD情報として「ROD不可」を含む第2の対応情報と、を含む。
【0109】
従って、無線基地局10は、「No」と判定してステップS404へ進み、無線基地局10の作動モードを非RODモードに設定する。そして、無線基地局10は、図7に示した設定処理の実行を終了する。
【0110】
また、ROD無線端末20のみが、無線基地局10へ接続要求を送信した場合を想定する。この場合、RODサポート表に含まれる対応情報は、ROD情報として「ROD可」を含む第1の対応情報のみを含む。
【0111】
従って、無線基地局10は、ステップS403にて「Yes」と判定してステップS403へ進み、無線基地局10の作動モードをRODモードに設定する。そして、無線基地局10は、図7に示した設定処理の実行を終了する。
【0112】
また、非ROD無線端末30のみが、無線基地局10へ接続要求を送信した場合を想定する。この場合、RODサポート表に含まれる対応情報は、ROD情報として「ROD不可」を含む第2の対応情報のみを含む。
【0113】
従って、無線基地局10は、ステップS403にて「No」と判定してステップS404へ進み、無線基地局10の作動モードを非RODモードに設定する。そして、無線基地局10は、図7に示した設定処理の実行を終了する。
【0114】
以上、説明したように、本発明の第1実施形態に係る無線基地局10は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
【0115】
これによれば、起動指示信号を送信可能な通信先装置(本例では、ROD無線端末20)と、起動指示信号を送信不能な通信先装置(本例では、非ROD無線端末30)と、が混在している場合においても、無線基地局10が消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行することができる。
【0116】
更に、本発明の第1実施形態に係る無線基地局10は、通知送信要求を通信先装置のそれぞれへ送信するように構成される。加えて、無線基地局10は、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信した場合、当該通信先装置に対して当該通信先装置がROD対応装置であることを表す対応情報を取得するように構成される。更に、無線基地局10は、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信しなかった場合、当該通信先装置に対して当該通信先装置がROD非対応装置であることを表す対応情報を取得するように構成される。
【0117】
これによれば、すべての通信先装置に対する対応情報を確実に取得することができる。
【0118】
加えて、本発明の第1実施形態に係る無線基地局10において、非RODモードは、第1の省電力条件が成立しない場合、送信周期を第1の送信周期に設定し、一方、当該第1の省電力条件が成立する場合、当該送信周期を当該第1の送信周期よりも長い第2の送信周期に設定するように構成される。
【0119】
これによれば、無線基地局10が非RODモードにて作動している場合においても、無線基地局10が消費する電力の量を低減することができる。
【0120】
更に、本発明の第1実施形態に係る無線基地局10において、非RODモードは、第2の省電力条件が成立する場合、無線基地局10が作動を停止する予定であることを通知するための作動停止通知を送信するとともに、無線基地局10への電力の供給を遮断するように構成される。
【0121】
これによれば、無線基地局10が非RODモードにて作動している場合においても、無線基地局10が消費する電力の量を低減することができる。
【0122】
更に、本発明の第1実施形態に係る無線基地局10が奏する効果について図8を参照しながら説明する。図8は、無線基地局10と無線通信可能な無線端末の数(無線端末数)と、平均通信網収束時間と、の関係を示したグラフである。
【0123】
平均通信網収束時間は、無線端末と無線基地局10との間で接続が確立された後、無線端末と無線基地局10との間で無線通信が行われなくなってから、通信網NWが安定するまでに要する平均時間を表す。
【0124】
無線端末のうちの起動指示信号を送信可能な無線端末は、ROD対応装置と呼ばれる。また、無線端末のうちの起動指示信号を送信不能な無線端末は、ROD非対応装置と呼ばれる。
【0125】
ところで、無線端末数が比較的大きくなると、通信網NWは収束しなくなる。従って、図8においても、無線端末数が大きくなるにつれて、平均通信網収束時間は、大きくなる。
また、平均通信網収束時間が大きくなるほど、無線基地局10の状態がスリープ状態に設定される時間が短くなる。従って、平均通信網収束時間が大きくなるほど、無線基地局10が消費する電力の量は、大きくなる。
【0126】
図8において、実線C1は、第1実施形態に係る無線基地局10と、ROD対応装置及びROD非対応装置の両方を含む無線端末と、を備える比較例に係る無線通信システムに対するグラフである。
【0127】
また、一点鎖線C2は、ユーザにより入力された指示に従って作動モードを設定するように構成された無線基地局と、ROD対応装置及びROD非対応装置の両方を含む無線端末と、を備える第1の比較例に係る無線通信システムに対するグラフである。
【0128】
また、点線C3は、常時、RODモードにて作動する無線基地局と、ROD対応装置のみを含む無線端末と、を備える第2の比較例に係る無線通信システムに対するグラフである。
【0129】
第2の比較例においては、無線基地局が、常時、RODモードにて作動する。従って、ROD非対応装置が無線基地局と無線通信を実行できない場合が生じる。
【0130】
また、第1の比較例においては、ユーザが指示を入力することにより作動モードを変更する遅延時間が余分に発生する。従って、第1の比較例においては、同一の無線端末数に対する平均通信網収束時間は、第1実施形態よりも大きくなる。
【0131】
このように、第1実施形態に係る無線基地局10によれば、平均通信網収束時間をより短くすることができるので、無線基地局10が消費する電力の量を小さくすることができる。更に、第1実施形態に係る無線基地局10によれば、ROD非対応装置とも確実に無線通信を行うことができる。
【0132】
なお、第1実施形態に係る無線基地局10において、電力供給部16は、第1の通信制御部11への電力の供給を中止している場合にのみ、起動指示信号受信部13へ電力を供給するように構成されていてもよい。
【0133】
また、第1実施形態の第1変形例に係る無線通信システム1Aは、図9に示したように、ホームゲートウェイ51と、テレビ52と、携帯ゲーム機53と、ルータ54と、火災報知器55と、ガス漏れ検知器56と、を備える。
【0134】
本例では、ホームゲートウェイ51、テレビ52、携帯ゲーム機53、及び、ルータ54は、第1の通信網NW1(本例では、無線LAN)を構成する。なお、第1の通信網NW1は、移動体通信網、近距離無線通信網、又は、WiMAX等であってもよい。
ホームゲートウェイ51は、インターネット網NWWに接続されている。
【0135】
また、ルータ54、火災報知器55、及び、ガス漏れ検知器56は、第2の通信網NW2(本例では、有線LAN)を構成する。なお、第2の通信網NW2は、無線LAN、移動体通信網、近距離無線通信網、又は、WiMAX等であってもよい。
【0136】
即ち、ルータ54は、ホームゲートウェイ51と、テレビ52、携帯ゲーム機53、及び、ルータ54と、により構成される第1の通信網NW1に加えて、第1の通信網NW1と異なる第2の通信網NW2を構成する装置である、と言うことができる。
【0137】
ホームゲートウェイ51は、第1実施形態に係る無線基地局10と同様の構成を有する。また、テレビ52、携帯ゲーム機53、及び、ルータ54のそれぞれは、第1実施形態に係るROD無線端末20又は非ROD無線端末30と同様の構成を有する。
【0138】
この第1変形例に係る無線通信システム1Aによっても、第1実施形態に係る無線通信システム1と同様の作用及び効果を奏することができる。
【0139】
<第2実施形態>
次に、本発明の第2実施形態に係る無線通信システムについて説明する。第2実施形態に係る無線通信システムは、上記第1実施形態に係る無線通信システムに対して、複数の無線通信装置と、各無線通信装置の作動モードを設定する制御装置と、を備える点において相違している。従って、以下、かかる相違点を中心として説明する。
【0140】
第2実施形態に係る無線通信システム2は、図10に示したように、制御装置(ネットワーク・コントローラ)61と、複数(本例では、3つ)の無線基地局62a,62b,62cと、複数(本例では、3つ)の無線端末63a,63b,63cと、を備える。
【0141】
なお、無線通信システム2は、1つ、2つ、又は、4つ以上の無線基地局を備えていてもよい。また、無線通信システム2は、1つ、2つ、又は、4つ以上の無線端末を備えていてもよい。また、無線基地局62a,62b,62cは、ルータ、又は、LANスイッチであってもよい。
【0142】
制御装置61と、複数の無線基地局62a,62b,62cのそれぞれと、は通信網NW3を介して互いに通信可能に接続されている。なお、制御装置61は、複数の無線基地局62a,62b,62cのそれぞれと直接に接続されていてもよい。
【0143】
複数の無線基地局62a,62b,62cのそれぞれは、複数の無線端末63a,63b,63cのそれぞれと無線通信を実行可能に構成される。具体的には、複数の無線基地局62a,62b,62cのそれぞれは、当該無線基地局との間の距離が所定の閾値距離よりも短い無線端末63a,63b,63cと無線通信を実行可能に構成される。
【0144】
複数の無線端末63a,63b,63cのそれぞれは、起動指示信号を送信可能なROD対応装置、又は、起動指示信号を送信不能なROD非対応装置である。
なお、複数の無線基地局62a,62b,62cのそれぞれは、無線通信装置を構成している。また、複数の無線端末63a,63b,63cのそれぞれは、通信先装置を構成している。
【0145】
本例では、複数の無線端末63a,63b,63cのそれぞれは、異なるユーザにより携帯されている。従って、各無線端末63a,63b,63cは、当該無線端末を携帯するユーザの移動に伴って移動する。
【0146】
複数の無線基地局62a,62b,62cのそれぞれは、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。即ち、複数の無線基地局62a,62b,62cのそれぞれは、ROD装置である。
【0147】
複数の無線基地局62a,62b,62cのそれぞれのRODモードにおける作動は、第1実施形態に係る無線基地局10のRODモードにおける作動と同様である。また、複数の無線基地局62a,62b,62cのそれぞれの非RODモードにおける作動は、第1実施形態に係る無線基地局10の非RODモードにおける作動と同様である。
【0148】
複数の無線基地局62a,62b,62cのそれぞれは、第1実施形態に係る無線基地局10と同様に、図4に示した接続処理を実行する。従って、複数の無線基地局62a,62b,62cのそれぞれは、自局と無線通信可能な無線端末のそれぞれに対して対応情報を取得し、取得された対応情報をRODサポート表に追加する。
【0149】
複数の無線基地局62a,62b,62cのそれぞれは、予め定められた設定タイミングにて(例えば、予め設定された周期が経過する毎に、又は、RODサポート表記憶部151に記憶されているRODサポート表が変更される毎に)、図7に示した設定処理を実行することに代えて、RODサポート表を制御装置61へ送信する。
【0150】
また、複数の無線基地局62a,62b,62cのそれぞれは、制御装置61から作動モード設定情報を受信する。作動モード設定情報は、RODモードを表す情報、又は、非RODモードを表す情報である。複数の無線基地局62a,62b,62cのそれぞれは、作動モード設定情報を受信した場合、作動モードを、作動モード設定情報が表す作動モードに設定する。
【0151】
一方、制御装置61は、図11に示したように、RODサポート表受信部61aと、作動モード決定部61bと、作動モード設定情報送信部61cと、を備える。RODサポート表受信部61aは、対応情報取得手段を構成している。また、作動モード決定部61b及び作動モード設定情報送信部61cは、作動モード設定手段を構成している。
【0152】
RODサポート表受信部61aは、複数の無線端末63a,63b,63cのそれぞれからRODサポート表を受信する。RODサポート表受信部61aは、受信されたRODサポート表を、当該RODサポート表を送信してきた無線端末を識別するための情報と対応付けて記憶する。
【0153】
作動モード決定部61bは、複数の無線端末63a,63b,63cのそれぞれに対して、RODサポート表受信部61aに記憶されているRODサポート表に基づいて作動モードを決定する。具体的には、作動モード決定部61bは、作動モードを決定する対象となる無線端末(対象無線端末)を識別するための情報と対応付けて記憶されているRODサポート表に基づいて、対象無線端末の作動モードを決定する。
【0154】
作動モード決定部61bは、第1実施形態に係る無線基地局10と同様に、RODサポート表に含まれる、すべての対応情報のそれぞれが、ROD情報として「ROD可」を含む場合、作動モードとしてRODモードを決定する。一方、作動モード決定部61bは、第1実施形態に係る無線基地局10と同様に、RODサポート表に含まれる対応情報の少なくとも1つが、ROD情報として「ROD不可」を含む場合、作動モードとして非RODモードを決定する。
【0155】
作動モード設定情報送信部61cは、作動モード決定部61bにより決定された作動モードを表す作動モード設定情報を、当該作動モードを決定する対象となった無線端末へ送信する。
【0156】
即ち、制御装置61は、複数の無線基地局62a,62b,62cのそれぞれに対して、独立に、図7に示した設定処理を実行する。なお、第2実施形態においては、当該設定処理にて、制御装置61は、作動モード設定情報を無線基地局へ送信することにより、当該無線基地局の作動モードを設定する。
【0157】
従って、例えば、複数の無線端末63a,63b,63cのすべてがROD対応装置である場合、制御装置61は、複数の無線基地局62a,62b,62cのすべての作動モードをRODモードに設定する。
【0158】
また、例えば、無線端末63a、及び、無線端末63bのそれぞれがROD対応装置であり、且つ、無線端末63cがROD非対応装置である場合を想定する。更に、無線端末63a、及び、無線端末63bのそれぞれが無線基地局62aと無線通信可能であり、且つ、無線端末63cが無線基地局62cと無線通信可能である場合を想定する。この場合、制御装置61は、無線基地局62a、及び、無線基地局62bのそれぞれの作動モードをRODモードに設定し、且つ、無線基地局62cの作動モードを非RODモードに設定する。
【0159】
このように、第2実施形態に係る無線通信システム2によっても、第1実施形態に係る無線通信システム1と同様の作用及び効果を奏することができる。
【0160】
なお、無線通信システム2は、非RODモードのみにて作動するように構成された非ROD装置としての無線基地局を更に備えていてもよい。
【0161】
次に、第2実施形態の第1変形例に係る無線通信システム2について説明する。この第1変形例に係る制御装置61は、複数の無線基地局62a,62b,62cのすべての作動モードを同一の作動モードに設定する。
【0162】
具体的には、制御装置61は、記憶しているRODサポート表のすべてに含まれるすべての対応情報のそれぞれが、ROD情報として「ROD可」を含む場合、作動モードとしてRODモードを決定する。一方、制御装置61は、記憶しているRODサポート表のすべてに含まれる対応情報の少なくとも1つが、ROD情報として「ROD不可」を含む場合、作動モードとして非RODモードを決定する。
【0163】
そして、制御装置61は、決定された作動モードを表す作動モード設定情報を、複数の無線端末63a,63b,63cのそれぞれへ送信する。
【0164】
従って、例えば、複数の無線端末63a,63b,63cのすべてがROD対応装置である場合、制御装置61は、複数の無線基地局62a,62b,62cのすべての作動モードをRODモードに設定する。
【0165】
また、例えば、無線端末63a、及び、無線端末63bのそれぞれがROD対応装置であり、且つ、無線端末63cがROD非対応装置である場合、制御装置61は、複数の無線基地局62a,62b,62cのすべての作動モードを非RODモードに設定する。
【0166】
これによれば、ROD非対応装置が、いずれの無線基地局(ROD装置)と無線通信可能となった場合においても、当該無線基地局と確実に無線通信を行うことができる。
【0167】
次に、図12に示したように、第2実施形態の第2変形例に係る無線通信システム2Aについて説明する。本例では、無線端末63a、及び、無線端末63bのそれぞれがROD対応装置であり、且つ、無線端末63cがROD非対応装置である場合を想定する。
【0168】
第2変形例に係る無線通信システム2Aにおいては、ROD非対応装置である無線端末63cは、自端末の位置を表す位置情報を取得し、取得された位置情報を無線基地局62cを介して制御装置61へ送信する。なお、無線通信システム2Aは、ROD非対応装置と無線通信可能な無線基地局が、ROD非対応装置の位置を表す位置情報を取得し、取得された位置情報を制御装置61へ送信するように構成されていてもよい。
【0169】
制御装置61は、受信した位置情報に基づいて、無線端末63cが接続を確立すべき無線基地局を決定する。制御装置61は、決定された無線基地局(第2の無線基地局)が、現時点にて無線端末63cとの間で接続が確立されている(無線端末63cと無線通信可能な)無線基地局(第1の無線基地局)と異なる場合、移行処理を実行する。
【0170】
移行処理は、第2の無線基地局の作動モードを非RODモードに設定する処理と、第1の無線基地局の作動モードをRODモードに設定する処理と、を含む。具体的には、移行処理は、第2の無線基地局の状態が、スリープ状態である場合、起動指示信号を第2の無線基地局へ送信し、その後、作動モード設定情報を第2の無線基地局へ送信する処理を含む。
【0171】
いま、無線端末63a、及び、無線端末63bのそれぞれが無線基地局62aと無線通信可能であり、且つ、無線端末63cが無線基地局62cと無線通信可能である場合を想定する。この場合、制御装置61は、無線基地局62a、及び、無線基地局62bのそれぞれの作動モードをRODモードに設定し、且つ、無線基地局62cの作動モードを非RODモードに設定する。
【0172】
その後、無線端末63cが、無線基地局62bとの間で接続を確立すべき位置へ移動した(図12の矢印A1)場合を想定する。この場合、無線端末63cが制御装置61へ送信した位置情報(図12の矢印A2)に基づいて、制御装置61は、無線端末63cが接続を確立すべき無線基地局を決定する。
【0173】
そして、制御装置61は、無線基地局62bの状態がスリープ状態である場合、無線基地局62bへ起動指示信号を送信する(図12の矢印A3)。更に、制御装置61は、非RODモードを表す作動モード設定情報を無線基地局62bへ送信し、且つ、RODモードを表す作動モード設定情報を無線基地局62cへ送信する。
【0174】
このように、第2変形例に係る制御装置61は、ROD非対応装置である無線端末63cと無線通信可能な無線基地局が、無線基地局62c(第1の無線通信装置)から無線基地局62b(第2の無線通信装置)へ変化する場合において、無線基地局62bの作動モードを非RODモードに設定し、且つ、無線基地局62cの作動モードをRODモードに設定する。
【0175】
これによれば、ROD非対応装置である無線端末63cが移動することにより、無線基地局62bと無線通信可能となった場合において、無線端末63cが無線基地局62bと確実に無線通信を行うことができる。更に、無線基地局62cが消費する電力の量を低減することもできる。
【0176】
次に、図13に示したように、第2実施形態の第3変形例に係る無線通信システム2Cについて説明する。この第3変形例に係る無線通信システム2Cは、3つの無線基地局62a,62b,62cに加えて、2つの無線基地局62d,62eを備える。
【0177】
2つの無線基地局62d,62eのそれぞれも、無線基地局62a,62b,62cと同様に構成される。即ち、複数の無線基地局62a〜62eのそれぞれは、ROD装置である。なお、無線通信システム2Cは、非ROD装置である無線基地局を更に備えていてもよい。
【0178】
第3変形例に係る制御装置61は、複数の無線基地局62a〜62eのそれぞれの位置を表す位置情報を取得する位置情報取得部(位置情報取得手段)を備える。
【0179】
更に、制御装置61は、複数の無線基地局62a〜62eの任意の1つ(第1のROD装置)の作動モードを非RODモードに設定する際、第1のROD装置の近傍に位置する無線基地局(第2のROD装置)を、取得された位置情報に基づいて特定する。
【0180】
本例では、制御装置61は、第1のROD装置との間の距離が、予め設定された閾値距離以下であるROD装置を、第1のROD装置の近傍に位置するROD装置として特定する。なお、制御装置61は、第1のROD装置の最も近くに位置するROD装置を、第1のROD装置の近傍に位置するROD装置として特定するように構成されていてもよい。
【0181】
加えて、制御装置61は、特定された第2のROD装置の作動モードも非RODモードに設定する。
【0182】
本例において、RODモードにて作動するROD装置である無線基地局は、RODモードクラスタを構成する。また、非RODモードにて作動するROD装置である無線基地局、及び、非ROD装置である無線基地局は、非RODモードクラスタを構成する。
【0183】
いま、無線端末63a、及び、無線端末63bのそれぞれがROD対応装置であり、且つ、無線端末63cがROD非対応装置である場合を想定する。更に、無線端末63a、及び、無線端末63bのそれぞれが無線基地局62aと無線通信可能であり、且つ、無線端末63cが無線基地局62dと無線通信可能である場合を想定する。加えて、無線基地局62dと、無線基地局62c及び無線基地局62eのそれぞれと、の間の距離が閾値距離以下である場合を想定する。
【0184】
この場合、制御装置61は、無線基地局62a、及び、無線基地局62bのそれぞれの作動モードをRODモードに設定し、且つ、無線基地局62dの作動モードを非RODモードに設定する。更に、制御装置61は、無線基地局62dの作動モードを非RODモードに設定する際、無線基地局62c、及び、無線基地局62eの作動モードも非RODモードに設定する。
【0185】
これによれば、無線基地局62d(第1のROD装置)と無線通信を行っていた無線端末63c(ROD非対応装置)が、移動することにより、無線基地局62c、又は、無線基地局62e(第2のROD装置)と無線通信可能となった場合において、無線端末63cが第2のROD装置と確実に無線通信を行うことができる。
【0186】
<第3実施形態>
次に、本発明の第3実施形態に係るシステムについて説明する。第3実施形態に係るシステムは、上記第1実施形態に係る無線通信システムに対して、複数の無線通信装置を備えるとともに、複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成する点において相違している。従って、以下、かかる相違点を中心として説明する。
【0187】
図14に示したように、第3実施形態に係る無線通信システム3は、複数(本例では、6つ)の無線通信装置71〜76を備える。なお、無線通信システム3は、5つ以下、又は、7つ以上の無線通信装置を備えていてもよい。
【0188】
複数の無線通信装置71〜76は、無線通信可能に構成される。複数の無線通信装置71〜76のそれぞれは、メッシュ型の通信網におけるノードを構成する。無線通信装置71〜76は、それぞれ、ノード#1〜#6とも呼ばれる。
【0189】
本例では、無線通信装置71は、無線通信装置72、及び、無線通信装置73のそれぞれと無線通信可能に接続される。また、無線通信装置74は、無線通信装置72、無線通信装置73、無線通信装置75、及び、無線通信装置76のそれぞれと無線通信可能に接続される。
【0190】
複数の無線通信装置71〜76のそれぞれは、ROD装置、又は、非ROD装置である。本例では、無線通信装置71、無線通信装置72、無線通信装置74、及び、無線通信装置76のそれぞれは、ROD装置である。また、無線通信装置73、及び、無線通信装置75のそれぞれは、非ROD装置である。
【0191】
第3実施形態に係る各ROD装置71,72,74,76は、第1実施形態に係る無線基地局10と同様に、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。また、第3実施形態に係る各非ROD装置73,75は、非RODモードにて作動するように構成される。
【0192】
各ROD装置71,72,74,76は、対応情報を含むRODサポート表を記憶する。1つの対応情報は、無線通信装置71〜76を識別するための無線通信装置識別情報(ノードID)と、ROD情報と、を含む。
【0193】
各ROD装置71,72,74,76は、自ノードと通信網において隣接する(即ち、自ノードと無線通信可能に接続された)ノードである隣接ノードのそれぞれへ通知送信要求を送信する。通知送信要求は、対応可能通知の送信を要求する情報である。対応可能通知は、起動指示信号を送信可能であることを表す情報である。
【0194】
各ROD装置71,72,74,76は、隣接ノードから通知送信要求を受信した場合、対応可能通知を当該隣接ノードへ送信する(対応可能通知送信手段)。一方、非ROD装置73,75は、対応可能通知を送信しない。
【0195】
各ROD装置71,72,74,76は、送信した通知送信要求に応じて、予め設定された待機時間内に、隣接ノードから対応可能通知を受信した場合、当該隣接ノードに対して当該隣接ノードが起動指示信号を送信可能である(ROD装置である)ことを表す対応情報を取得する。
【0196】
一方、各ROD装置71,72,74,76は、送信した通知送信要求に応じて、上記待機時間内に、隣接ノードから対応可能通知を受信しなかった場合、当該隣接ノードに対して当該隣接ノードが起動指示信号を送信不能である(非ROD装置である)ことを表す対応情報を取得する。
【0197】
このようにして、各ROD装置71,72,74,76は、隣接ノードのそれぞれに対して対応情報を取得する(対応情報取得手段)。そして、各ROD装置71,72,74,76は、取得された対応情報を記憶する(RODサポート表を更新する)。
【0198】
なお、各ROD装置71,72,74,76は、対応可能通知を含むHELLOメッセージを送信するように構成されていてもよい。この場合、各ROD装置71,72,74,76は、隣接ノードから受信したHELLOメッセージが対応可能通知を含む場合、当該隣接ノードに対して当該隣接ノードが起動指示信号を送信可能である(ROD装置である)ことを表す対応情報を取得する。
【0199】
各ROD装置71,72,74,76が非RODモードにて作動する場合、当該ROD装置71,72,74,76は、常時、自ノードの状態を起動状態に設定する。
【0200】
また、各ROD装置71,72,74,76がRODモードにて作動する場合、当該ROD装置71,72,74,76は、起動状態とスリープ状態とのいずれかに自ノードの状態を設定する。
【0201】
更に、各ROD装置71,72,74,76がRODモードにて作動する場合、当該ROD装置71,72,74,76は、自ノードの状態が起動状態であり、且つ、予め定められたスリープ条件が成立したとき、自ノードの状態をスリープ状態に設定する。例えば、スリープ条件は、現時点よりも、予め設定された第3の閾値時間だけ前の時点から、現時点までの間に、無線通信が行われていない、という条件である。
【0202】
加えて、各ROD装置71,72,74,76がRODモードにて作動する場合、当該ROD装置71,72,74,76は、自ノードの状態がスリープ状態であり、且つ、隣接ノードから起動指示信号が受信されたとき、自ノードの状態を起動状態に設定する。
【0203】
更に、各ROD装置71,72,74,76は、予め定められた設定タイミングにて(例えば、予め設定された周期が経過する毎に、又は、記憶しているRODサポート表が変更される毎に)、自ノードの作動モードを、RODモード又は非RODモードに設定する。
【0204】
具体的には、各ROD装置71,72,74,76は、自ノードが記憶している、すべての対応情報のそれぞれが、ROD情報として「ROD可」を含む場合(即ち、取得された対応情報が、隣接ノードのすべてがROD装置であることを表す場合)、作動モードをRODモードに設定する。これにより、各ROD装置71,72,74,76は、設定された作動モード(RODモード)にて作動する。
【0205】
一方、各ROD装置71,72,74,76は、自ノードが記憶している対応情報の少なくとも1つが、ROD情報として「ROD不可」を含む場合(即ち、取得された対応情報が、隣接ノードの少なくとも1つが非ROD装置であることを表す場合)、作動モードを非RODモードに設定する。これにより、各ROD装置71,72,74,76は、設定された作動モード(非RODモード)にて作動する。
【0206】
また、各ROD装置71,72,74,76は、起動指示信号を隣接ノードへ送信可能に構成される。一方、非ROD装置73,75のそれぞれは、起動指示信号を送信不能に構成される。
【0207】
従って、第3実施形態に係る無線通信システム3においては、ROD装置71、及び、ROD装置74のそれぞれは、自ノードの作動モードを非RODモードに設定する。また、ROD装置72、及び、ROD装置76のそれぞれは、自ノードの作動モードをRODモードに設定する。
【0208】
このように、第3実施形態に係る無線通信システム3によっても、第1実施形態に係る無線通信システム1と同様の作用及び効果を奏することができる。
【0209】
次に、第3実施形態の第1変形例に係る無線通信システム3について説明する。この第1変形例に係る無線通信システム3は、非ROD装置をROD装置よりも優先して通るように、データを伝送するための経路を決定する。具体的には、無線通信システム3は、ルーティングアルゴリズムを使用する際に、ルーティングメトリクスを決める要素の1つとしてRODサポート表を用いる。
【0210】
従って、例えば、ノード#1とノード#6とを結ぶ経路を決定する場合、無線通信システム3は、ノード#1、ノード#2、ノード#4、及び、ノード#6を通る第1の経路よりも、ノード#1、ノード#3、ノード#4、及び、ノード#6を通る第2の経路を優先して選択する(即ち、データを伝送するための経路として決定する)。
【0211】
ところで、非ROD装置は、常時、状態が起動状態に設定される。一方、ROD装置は、状態がスリープ状態に設定され得る。従って、上記構成によれば、状態がスリープ状態に設定されているROD装置の数を増加させることができる。この結果、無線通信システム3が消費する電力の量が無駄に増加することを回避することができる。
【0212】
また、第3実施形態の第2変形例に係る無線通信システム3について説明する。この第2変形例に係る無線通信システム3は、隣接ノードとして非ROD装置を有するノードを、隣接ノードとして非ROD装置を有しないノードよりも優先して通るように、データを伝送するための経路を決定する。
【0213】
ところで、隣接ノードとして非ROD装置を有するノードは、常時、状態が起動状態に設定される。一方、隣接ノードとして非ROD装置を有しないノードは、状態がスリープ状態に設定され得る。従って、上記構成によれば、状態がスリープ状態に設定されているROD装置の数を増加させることができる。この結果、無線通信システム3が消費する電力の量が無駄に増加することを回避することができる。
【0214】
<第4実施形態>
次に、本発明の第4実施形態に係る通信システムについて図15を参照しながら説明する。
第4実施形態に係る無線通信装置81は、少なくとも1つの通信先装置82と無線通信を実行可能に構成された装置である。
【0215】
更に、この無線通信装置81は、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成される。
【0216】
上記非RODモードは、
上記通信先装置82と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置81の状態を設定するように構成される。
【0217】
上記RODモードは、
上記起動状態と、信号を受信するために必要とされる電力が上記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ上記通信先装置82と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置81の状態を設定するように構成され、且つ、当該無線通信装置81の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置81の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置81の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置81の状態を当該起動状態に設定するように構成される。
【0218】
これによれば、起動指示信号を送信可能な通信先装置と、起動指示信号を送信不能な通信先装置と、が混在している場合においても、無線通信装置81が消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行することができる。
【0219】
以上、上記実施形態を参照して本願発明を説明したが、本願発明は、上述した実施形態に限定されるものではない。本願発明の構成及び詳細に、本願発明の範囲内において当業者が理解し得る様々な変更をすることができる。
【0220】
なお、上記各実施形態において無線通信システムの各機能は、回路等のハードウェアにより実現されていた。ところで、無線通信装置は、処理装置と、プログラム(ソフトウェア)を記憶する記憶装置と、を備えるとともに、処理装置がそのプログラムを実行することにより、各機能を実現するように構成されていてもよい。この場合、プログラムは、コンピュータが読み取り可能な記録媒体に記憶されていてもよい。例えば、記録媒体は、フレキシブルディスク、光ディスク、光磁気ディスク、及び、半導体メモリ等の可搬性を有する媒体である。
【0221】
また、上記実施形態の他の変形例として、上述した実施形態及び変形例の任意の組み合わせが採用されてもよい。
【0222】
<付記>
上記実施形態の一部又は全部は、以下の付記のように記載され得るが、以下には限られない。
【0223】
(付記1)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置であって、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信装置。
【0224】
これによれば、起動指示信号を送信可能な通信先装置と、起動指示信号を送信不能な通信先装置と、が混在している場合においても、無線通信装置が消費する電力の量を低減しながら、通信先装置と確実に無線通信を実行することができる。
【0225】
(付記2)
付記1に記載の無線通信装置であって、
前記通信先装置のそれぞれに対して、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記取得された対応情報が、前記通信先装置のすべてが前記ROD対応装置であることを表す場合、前記RODモードにて作動するように構成され、一方、当該取得された対応情報が、前記通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記非RODモードにて作動するように構成された無線通信装置。
【0226】
(付記3)
付記1又は付記2に記載の無線通信装置であって、
前記対応情報取得手段は、
前記起動指示信号を送信可能であることを表す対応可能通知の送信を要求する通知送信要求を前記通信先装置のそれぞれへ送信するとともに、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信した場合、当該通信先装置に対して当該通信先装置が前記ROD対応装置であることを表す対応情報を取得し、一方、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信しなかった場合、当該通信先装置に対して当該通信先装置が前記ROD非対応装置であることを表す対応情報を取得するように構成された無線通信装置。
【0227】
これによれば、すべての通信先装置に対する対応情報を確実に取得することができる。
【0228】
(付記4)
付記1乃至付記3のいずれかに記載の無線通信装置であって、
当該無線通信装置の状態が前記起動状態に設定されている場合、予め設定された送信周期が経過する毎に、当該無線通信装置と無線通信可能であることを通知するためのビーコン信号を送信するように構成された無線通信装置。
【0229】
(付記5)
付記4に記載の無線通信装置であって、
前記非RODモードは、
予め定められた第1の省電力条件が成立しない場合、前記送信周期を第1の送信周期に設定し、一方、当該第1の省電力条件が成立する場合、当該送信周期を当該第1の送信周期よりも長い第2の送信周期に設定するように構成された無線通信装置。
【0230】
これによれば、非RODモードにて作動している場合においても、無線通信装置が消費する電力の量を低減することができる。
【0231】
(付記6)
付記1乃至付記5のいずれかに記載の無線通信装置であって、
前記非RODモードは、
予め定められた第2の省電力条件が成立する場合、当該無線通信装置が作動を停止する予定であることを通知するための作動停止通知を送信するとともに、当該無線通信装置への電力の供給を遮断するように構成された無線通信装置。
【0232】
これによれば、非RODモードにて作動している場合においても、無線通信装置が消費する電力の量を低減することができる。
【0233】
(付記7)
付記1乃至付記6のいずれかに記載の無線通信装置であって、
無線基地局である無線通信装置。
【0234】
(付記8)
付記7に記載の無線通信装置であって、
前記通信先装置の少なくとも1つは、無線端末である無線通信装置。
【0235】
(付記9)
付記7又は付記8に記載の無線通信装置であって、
前記通信先装置の少なくとも1つは、前記無線通信装置と前記通信先装置とにより構成される第1の通信網に加えて、当該第1の通信網と異なる第2の通信網を構成する装置である無線通信装置。
【0236】
(付記10)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置に適用され、
前記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させ、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信装置制御方法。
【0237】
(付記11)
付記10に記載の無線通信装置制御方法であって、
前記通信先装置のそれぞれに対して、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記取得された対応情報が、前記通信先装置のすべてが前記ROD対応装置であることを表す場合、前記無線通信装置を前記RODモードにて作動させ、一方、当該取得された対応情報が、前記通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記無線通信装置を前記非RODモードにて作動させるように構成された無線通信装置制御方法。
【0238】
(付記12)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置が実行する無線通信装置制御プログラムであって、
前記無線通信装置に、
前記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させる処理を実行させるとともに、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信装置制御プログラム。
【0239】
(付記13)
付記12に記載の無線通信装置制御プログラムであって、
前記無線通信装置に、
前記通信先装置のそれぞれに対して、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記取得された対応情報が、前記通信先装置のすべてが前記ROD対応装置であることを表す場合、前記無線通信装置を前記RODモードにて作動させ、一方、当該取得された対応情報が、前記通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記無線通信装置を前記非RODモードにて作動させる、処理を実行させるように構成された無線通信装置制御プログラム。
【0240】
(付記14)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備える無線通信システムであって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信システム。
【0241】
(付記15)
付記14に記載の無線通信システムであって、
前記複数の無線通信装置のそれぞれと通信可能に構成された制御装置を備え、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する作動モード設定手段を備える無線通信システム。
【0242】
(付記16)
付記15に記載の無線通信システムであって、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記作動モード設定手段は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定するように構成された無線通信システム。
【0243】
(付記17)
付記16に記載の無線通信システムであって、
前記作動モード設定手段は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、当該ROD装置に対して前記取得された対応情報が、当該ROD装置と無線通信可能な通信先装置のすべてが前記ROD対応装置であることを表す場合、前記RODモードに設定し、一方、当該対応情報が、当該ROD装置と無線通信可能な通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記非RODモードに設定するように構成された無線通信システム。
【0244】
(付記18)
付記17に記載の無線通信システムであって、
前記作動モード設定手段は、
前記ROD非対応装置と無線通信可能な無線通信装置が、第1の無線通信装置から第2の無線通信装置へ変化する場合において、当該第2の無線通信装置が前記ROD装置であるとき、当該ROD装置の前記作動モードを前記非RODモードに設定し、且つ、当該第1の無線通信装置が前記ROD装置であるとき、当該ROD装置の前記作動モードを前記RODモードに設定するように構成された無線通信システム。
【0245】
これによれば、例えば、ROD非対応装置が移動することにより、第2の無線通信装置と無線通信可能となった場合において、当該ROD非対応装置が当該第2の無線通信装置と確実に無線通信を行うことができる。更に、第1の無線通信装置が消費する電力の量を低減することもできる。
【0246】
(付記19)
付記17又は付記18に記載の無線通信システムであって、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの位置を表す位置情報を取得する位置情報取得手段を備え、
前記作動モード設定手段は、
第1のROD装置としての前記ROD装置の前記作動モードを前記非RODモードに設定する際、当該第1のROD装置の近傍に位置する前記ROD装置である第2のROD装置を、前記取得された位置情報に基づいて特定し、当該特定された第2のROD装置の前記作動モードも前記非RODモードに設定するように構成された無線通信システム。
【0247】
これによれば、例えば、第1のROD装置と無線通信を行っていたROD非対応装置が、移動することにより、第2のROD装置と無線通信可能となった場合において、当該ROD非対応装置が当該第2のROD装置と確実に無線通信を行うことができる。
【0248】
(付記20)
付記16に記載の無線通信システムであって、
前記作動モード設定手段は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報が、前記ROD装置のいずれかと無線通信可能な通信先装置のすべてが前記ROD対応装置であることを表す場合、前記RODモードに設定し、一方、当該対応情報が、前記ROD装置のいずれかと無線通信可能な通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記非RODモードに設定するように構成された無線通信システム。
【0249】
これによれば、ROD非対応装置が、いずれのROD装置と無線通信可能となった場合においても、当該ROD装置と確実に無線通信を行うことができる。
【0250】
(付記21)
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備える無線通信システムに適用され、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置を、RODモード、及び、非RODモードのいずれかの作動モードにて作動させ、
前記非ROD装置を、非RODモードにて作動させ、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信システム制御方法。
【0251】
(付記22)
付記21に記載の無線通信システム制御方法であって、
前記無線通信システムは、前記複数の無線通信装置のそれぞれと通信可能に構成された制御装置を備え、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定するように構成された無線通信システム制御方法。
【0252】
(付記23)
付記22に記載の無線通信システム制御方法であって、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定するように構成された無線通信システム制御方法。
【0253】
(付記24)
少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置であって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する作動モード設定手段を備える制御装置。
【0254】
(付記25)
付記24に記載の制御装置であって、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記作動モード設定手段は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定するように構成された制御装置。
【0255】
(付記26)
少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置に適用され、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する、制御装置制御方法。
【0256】
(付記27)
付記26に記載の制御装置制御方法であって、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記制御装置が、前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定するように構成された制御装置制御方法。
【0257】
(付記28)
少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置が実行する制御装置制御プログラムであって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
前記制御装置に、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する処理を実行させるための制御装置制御プログラム。
【0258】
(付記29)
付記28に記載の制御装置制御プログラムであって、
前記制御装置に、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれに対して、当該ROD装置と無線通信可能な通信先装置毎に、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得し、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを、前記取得された対応情報に基づいて設定する、処理を実行させるための制御装置制御プログラム。
【0259】
(付記30)
無線通信可能に構成された無線通信装置を複数備える無線通信システムであって、
前記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成し、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
自ノードと前記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信システム。
【0260】
(付記31)
付記30に記載の無線通信システムであって、
前記ROD装置のそれぞれは、前記起動指示信号を送信可能に構成され、
前記非ROD装置のそれぞれは、前記起動指示信号を送信不能に構成され、
前記ROD装置のそれぞれは、
自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記ROD装置、及び、前記非ROD装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記RODモードにて作動するように構成され、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記非RODモードにて作動するように構成された無線通信システム。
【0261】
(付記32)
付記30又は付記31に記載の無線通信システムであって、
前記対応情報取得手段は、
前記起動指示信号を送信可能であることを表す対応可能通知の送信を要求する通知送信要求を前記隣接ノードのそれぞれへ送信するとともに、当該送信された通知送信要求に応じて当該隣接ノードから当該対応可能通知を受信した場合、当該隣接ノードに対して当該隣接ノードが前記ROD装置であることを表す対応情報を取得し、一方、当該送信された通知送信要求に応じて当該隣接ノードから当該対応可能通知を受信しなかった場合、当該隣接ノードに対して当該隣接ノードが前記非ROD装置であることを表す対応情報を取得するように構成され、
前記ROD装置のそれぞれは、
前記隣接ノードから前記通知送信要求を受信した場合、前記対応可能通知を当該隣接ノードへ送信する対応可能通知送信手段を備える無線通信システム。
【0262】
(付記33)
付記30乃至付記32のいずれかに記載の無線通信システムであって、
前記非ROD装置を前記ROD装置よりも優先して通るように、データを伝送するための経路を決定する無線通信システム。
【0263】
非ROD装置は、常時、状態が起動状態に設定される。一方、ROD装置は、状態がスリープ状態に設定され得る。従って、上記構成によれば、状態がスリープ状態に設定されているROD装置の数を増加させることができる。この結果、無線通信システムが消費する電力の量が無駄に増加することを回避することができる。
【0264】
(付記34)
付記30乃至付記33のいずれかに記載の無線通信システムであって、
前記隣接ノードとして前記非ROD装置を有するノードを、前記隣接ノードとして前記非ROD装置を有しないノードよりも優先して通るように、前記データを伝送するための経路を決定する無線通信システム。
【0265】
隣接ノードとして非ROD装置を有するノードは、常時、状態が起動状態に設定される。一方、隣接ノードとして非ROD装置を有しないノードは、状態がスリープ状態に設定され得る。従って、上記構成によれば、状態がスリープ状態に設定されているROD装置の数を増加させることができる。この結果、無線通信システムが消費する電力の量が無駄に増加することを回避することができる。
【0266】
(付記35)
無線通信可能に構成された無線通信装置を複数備える無線通信システムに適用され、
前記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成し、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置を、RODモード、及び、非RODモードのいずれかの作動モードにて作動させ、
前記非ROD装置を、非RODモードにて作動させ、
前記非RODモードは、
自ノードと前記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信システム制御方法。
【0267】
(付記36)
付記35に記載の無線通信システム制御方法であって、
前記ROD装置のそれぞれは、前記起動指示信号を送信可能に構成され、
前記非ROD装置のそれぞれは、前記起動指示信号を送信不能に構成され、
前記ROD装置のそれぞれが、自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記ROD装置、及び、前記非ROD装置、のいずれであるかを表す対応情報を取得し、
前記ROD装置のそれぞれが、前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記RODモードにて作動し、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記非RODモードにて作動する、無線通信システム制御方法。
【0268】
(付記37)
メッシュ型の通信網におけるノードを構成し、自ノードと前記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置であって、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非RODモードは、
前記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信装置。
【0269】
(付記38)
付記37に記載の無線通信装置であって、
前記起動指示信号を送信可能に構成され、
自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記起動指示信号を送信可能なROD装置、及び、前記起動指示信号を送信不能な非ROD装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記RODモードにて作動するように構成され、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記非RODモードにて作動するように構成された無線通信装置。
【0270】
(付記39)
メッシュ型の通信網におけるノードを構成し、自ノードと前記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置に適用され、
前記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させ、
前記非RODモードは、
前記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信装置制御方法。
【0271】
(付記40)
付記39に記載の無線通信装置制御方法であって、
前記無線通信装置が、前記起動指示信号を送信し、
自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記起動指示信号を送信可能なROD装置、及び、前記起動指示信号を送信不能な非ROD装置、のいずれであるかを表す対応情報を取得し、
前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記無線通信装置を前記RODモードにて作動させ、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記無線通信装置を前記非RODモードにて作動させるように構成された無線通信装置制御方法。
【0272】
(付記41)
メッシュ型の通信網におけるノードを構成し、自ノードと前記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置が実行する無線通信装置制御プログラムであって、
前記無線通信装置に、
前記無線通信装置を、ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動させる処理を実行させるとともに、
前記非RODモードは、
前記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信装置制御プログラム。
【0273】
(付記42)
付記41に記載の無線通信装置制御プログラムであって、
前記無線通信装置に、
前記起動指示信号を送信し、
自ノードと前記通信網において隣接するノードである隣接ノードのそれぞれに対して、当該隣接ノードが、前記起動指示信号を送信可能なROD装置、及び、前記起動指示信号を送信不能な非ROD装置、のいずれであるかを表す対応情報を取得し、
前記取得された対応情報が、前記隣接ノードのすべてが前記ROD装置であることを表す場合、前記無線通信装置を前記RODモードにて作動させ、一方、当該取得された対応情報が、前記隣接ノードの少なくとも1つが前記非ROD装置であることを表す場合、前記無線通信装置を前記非RODモードにて作動させる、処理を実行させるように構成された無線通信装置制御プログラム。
【産業上の利用可能性】
【0274】
本発明は、少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置等に適用可能である。
【符号の説明】
【0275】
1 無線通信システム
10 無線基地局
11 第1の通信制御部
12 第2の通信制御部
13 起動指示信号受信部
14 パケット転送部
15 状態制御部
151 RODサポート表記憶部
16 電力供給部
1A 無線通信システム
2 無線通信システム
20,30 無線端末
2A 無線通信システム
2C 無線通信システム
3 無線通信システム
40 通信端末
51 ホームゲートウェイ
52 テレビ
53 携帯ゲーム機
54 ルータ
55 火災報知器
56 ガス漏れ検知器
61 制御装置
61a RODサポート表受信部
61b 作動モード決定部
61c 作動モード設定情報送信部
62a〜62e 無線基地局
63a,63b,63c 無線端末
71〜76 無線通信装置
81 無線通信装置
82 通信先装置
NW 通信網
NW1 第1の通信網
NW2 第2の通信網
NW3 通信網
NWW インターネット網
【特許請求の範囲】
【請求項1】
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置であって、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信装置。
【請求項2】
請求項1に記載の無線通信装置であって、
前記通信先装置のそれぞれに対して、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記取得された対応情報が、前記通信先装置のすべてが前記ROD対応装置であることを表す場合、前記RODモードにて作動するように構成され、一方、当該取得された対応情報が、前記通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記非RODモードにて作動するように構成された無線通信装置。
【請求項3】
請求項1又は請求項2に記載の無線通信装置であって、
前記対応情報取得手段は、
前記起動指示信号を送信可能であることを表す対応可能通知の送信を要求する通知送信要求を前記通信先装置のそれぞれへ送信するとともに、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信した場合、当該通信先装置に対して当該通信先装置が前記ROD対応装置であることを表す対応情報を取得し、一方、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信しなかった場合、当該通信先装置に対して当該通信先装置が前記ROD非対応装置であることを表す対応情報を取得するように構成された無線通信装置。
【請求項4】
請求項1乃至請求項3のいずれかに記載の無線通信装置であって、
当該無線通信装置の状態が前記起動状態に設定されている場合、予め設定された送信周期が経過する毎に、当該無線通信装置と無線通信可能であることを通知するためのビーコン信号を送信するように構成された無線通信装置。
【請求項5】
請求項4に記載の無線通信装置であって、
前記非RODモードは、
予め定められた第1の省電力条件が成立しない場合、前記送信周期を第1の送信周期に設定し、一方、当該第1の省電力条件が成立する場合、当該送信周期を当該第1の送信周期よりも長い第2の送信周期に設定するように構成された無線通信装置。
【請求項6】
請求項1乃至請求項5のいずれかに記載の無線通信装置であって、
前記非RODモードは、
予め定められた第2の省電力条件が成立する場合、当該無線通信装置が作動を停止する予定であることを通知するための作動停止通知を送信するとともに、当該無線通信装置への電力の供給を遮断するように構成された無線通信装置。
【請求項7】
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備える無線通信システムであって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信システム。
【請求項8】
少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置であって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する作動モード設定手段を備える制御装置。
【請求項9】
無線通信可能に構成された無線通信装置を複数備える無線通信システムであって、
前記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成し、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
自ノードと前記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信システム。
【請求項10】
メッシュ型の通信網におけるノードを構成し、自ノードと前記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置であって、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非RODモードは、
前記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信装置。
【請求項1】
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置であって、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信装置。
【請求項2】
請求項1に記載の無線通信装置であって、
前記通信先装置のそれぞれに対して、当該通信先装置が、前記起動指示信号を送信可能なROD対応装置、及び、当該起動指示信号を送信不能なROD非対応装置、のいずれであるかを表す対応情報を取得する対応情報取得手段を備え、
前記取得された対応情報が、前記通信先装置のすべてが前記ROD対応装置であることを表す場合、前記RODモードにて作動するように構成され、一方、当該取得された対応情報が、前記通信先装置の少なくとも1つが前記ROD非対応装置であることを表す場合、前記非RODモードにて作動するように構成された無線通信装置。
【請求項3】
請求項1又は請求項2に記載の無線通信装置であって、
前記対応情報取得手段は、
前記起動指示信号を送信可能であることを表す対応可能通知の送信を要求する通知送信要求を前記通信先装置のそれぞれへ送信するとともに、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信した場合、当該通信先装置に対して当該通信先装置が前記ROD対応装置であることを表す対応情報を取得し、一方、当該送信された通知送信要求に応じて当該通信先装置から当該対応可能通知を受信しなかった場合、当該通信先装置に対して当該通信先装置が前記ROD非対応装置であることを表す対応情報を取得するように構成された無線通信装置。
【請求項4】
請求項1乃至請求項3のいずれかに記載の無線通信装置であって、
当該無線通信装置の状態が前記起動状態に設定されている場合、予め設定された送信周期が経過する毎に、当該無線通信装置と無線通信可能であることを通知するためのビーコン信号を送信するように構成された無線通信装置。
【請求項5】
請求項4に記載の無線通信装置であって、
前記非RODモードは、
予め定められた第1の省電力条件が成立しない場合、前記送信周期を第1の送信周期に設定し、一方、当該第1の省電力条件が成立する場合、当該送信周期を当該第1の送信周期よりも長い第2の送信周期に設定するように構成された無線通信装置。
【請求項6】
請求項1乃至請求項5のいずれかに記載の無線通信装置であって、
前記非RODモードは、
予め定められた第2の省電力条件が成立する場合、当該無線通信装置が作動を停止する予定であることを通知するための作動停止通知を送信するとともに、当該無線通信装置への電力の供給を遮断するように構成された無線通信装置。
【請求項7】
少なくとも1つの通信先装置と無線通信を実行可能に構成された無線通信装置を複数備える無線通信システムであって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成された無線通信システム。
【請求項8】
少なくとも1つの通信先装置と無線通信を実行可能に構成された複数の無線通信装置のそれぞれと通信可能に構成された制御装置であって、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
前記通信先装置と、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該無線通信装置の状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記通信先装置と当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに当該無線通信装置の状態を設定するように構成され、且つ、当該無線通信装置の状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該無線通信装置の状態を当該スリープ状態に設定するように構成され、且つ、当該無線通信装置の状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該無線通信装置の状態を当該起動状態に設定するように構成され、
前記制御装置は、
前記複数の無線通信装置のうちの前記ROD装置のそれぞれの前記作動モードを設定する作動モード設定手段を備える制御装置。
【請求項9】
無線通信可能に構成された無線通信装置を複数備える無線通信システムであって、
前記複数の無線通信装置のそれぞれは、メッシュ型の通信網におけるノードを構成し、
前記複数の無線通信装置のそれぞれは、ROD(Radio on Demand)装置、又は、非ROD装置であり、
前記ROD装置は、RODモード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非ROD装置は、非RODモードにて作動するように構成され、
前記非RODモードは、
自ノードと前記通信網において隣接するノードである隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信システム。
【請求項10】
メッシュ型の通信網におけるノードを構成し、自ノードと前記通信網において隣接するノードである隣接ノードと無線通信可能に構成された無線通信装置であって、
ROD(Radio on Demand)モード、及び、非RODモードのいずれかの作動モードにて作動するように構成され、
前記非RODモードは、
前記隣接ノードと、予め定められた第1の通信方式に従った無線通信を実行可能な状態である起動状態に当該自ノードの状態を設定するように構成され、
前記RODモードは、
前記起動状態と、信号を受信するために必要とされる電力が前記第1の通信方式よりも小さい第2の通信方式に従った起動指示信号を受信可能であり且つ前記隣接ノードと当該第1の通信方式に従った無線通信を実行不能な状態であるスリープ状態と、のいずれかに前記自ノードの状態を設定するように構成され、且つ、当該自ノードの状態が当該起動状態である場合において、予め定められたスリープ条件が成立したとき、当該自ノードの状態を当該スリープ状態に設定するように構成され、且つ、当該自ノードの状態が当該スリープ状態である場合において、当該起動指示信号を受信したとき、当該自ノードの状態を当該起動状態に設定するように構成された無線通信装置。
【図1】


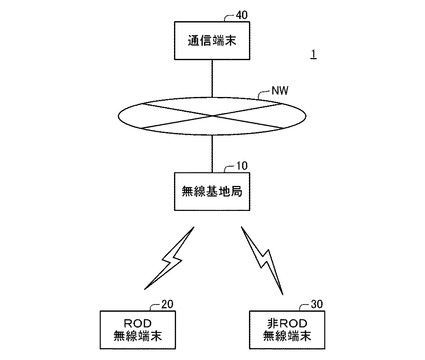
【図2】
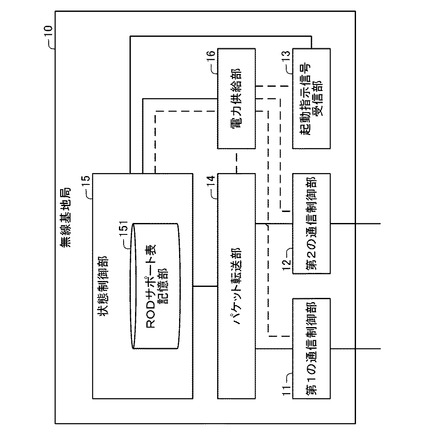
【図3】
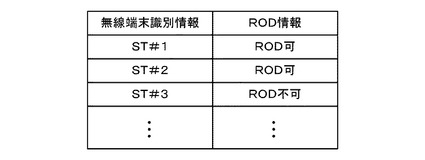
【図4】
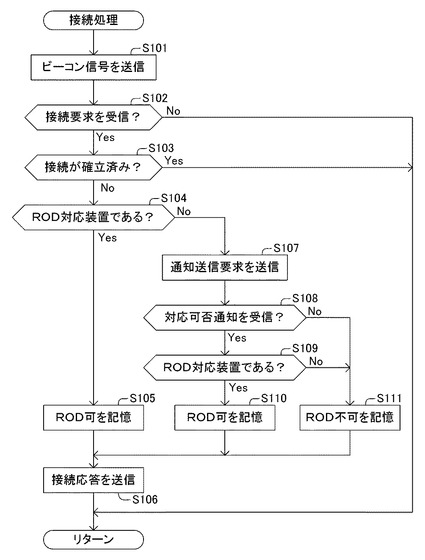
【図5】
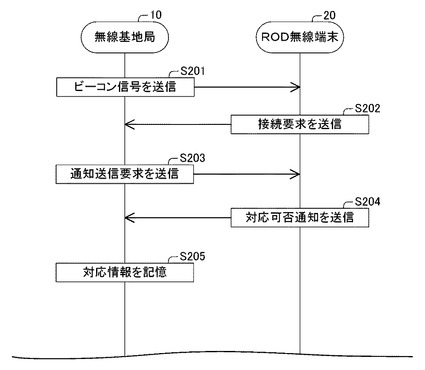
【図6】
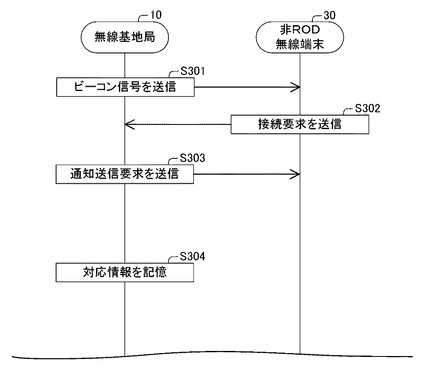
【図7】
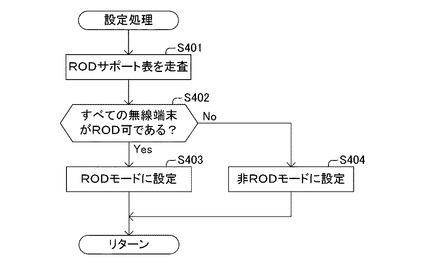
【図8】
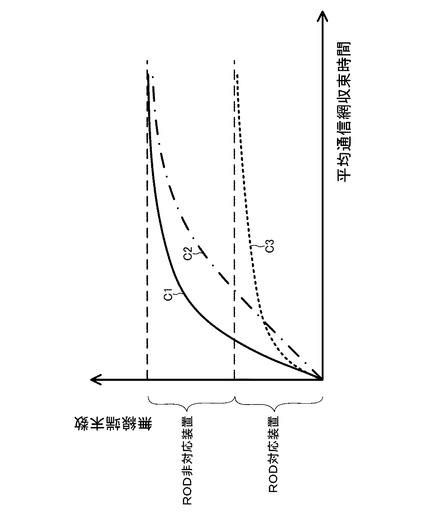
【図9】
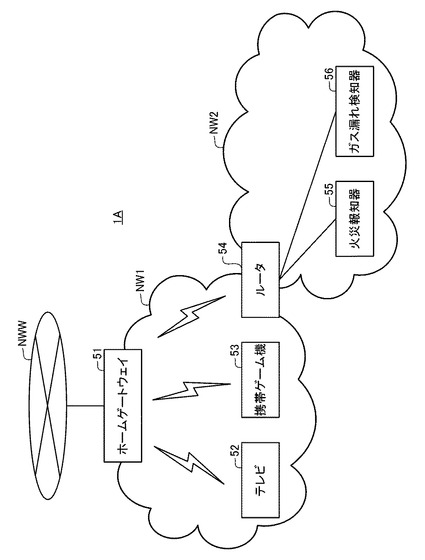
【図10】
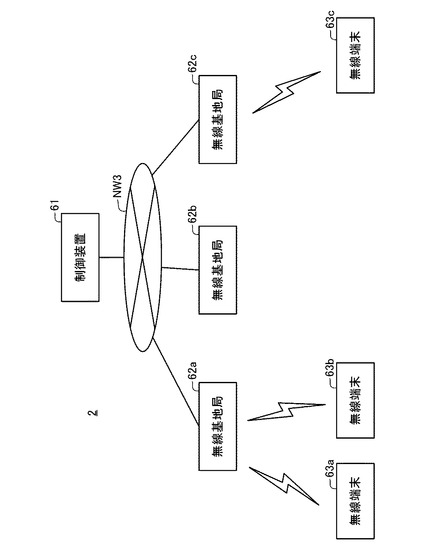
【図11】
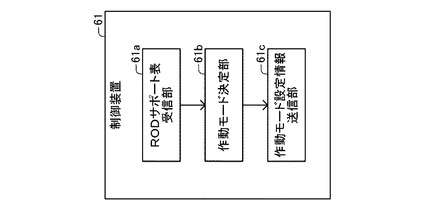
【図12】
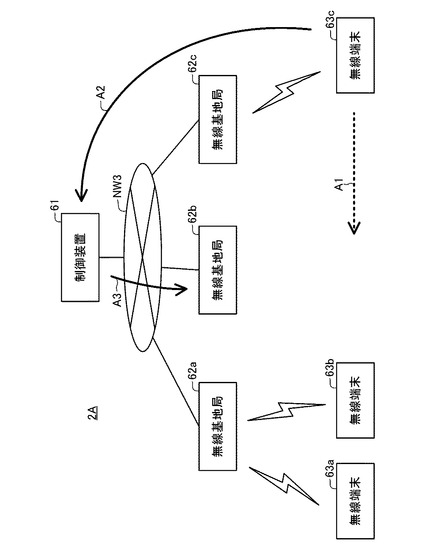
【図13】
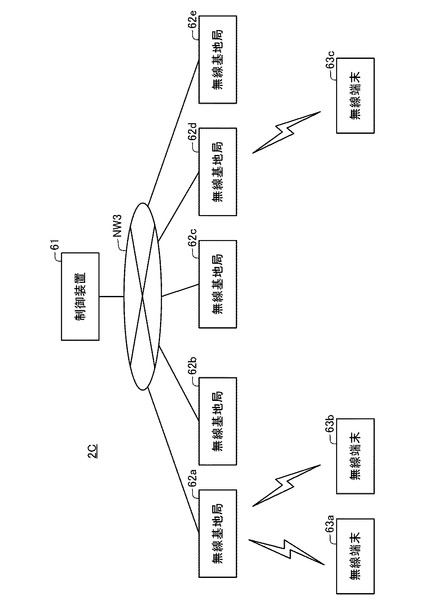
【図14】
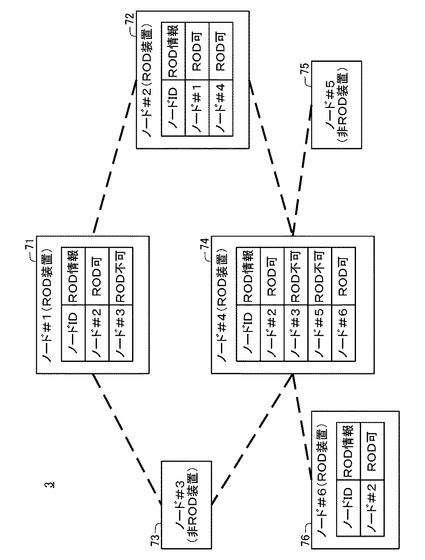
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−115466(P2013−115466A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−257263(P2011−257263)
【出願日】平成23年11月25日(2011.11.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成23年度 総務省 地球温暖化対策ICTイノベーション推進事業「無駄な消費電力量を削減するRadio On Demand Networksの研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(000232254)日本電気通信システム株式会社 (586)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月25日(2011.11.25)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成23年度 総務省 地球温暖化対策ICTイノベーション推進事業「無駄な消費電力量を削減するRadio On Demand Networksの研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(000232254)日本電気通信システム株式会社 (586)
【Fターム(参考)】
[ Back to top ]