
無線通信装置、車両配置関係情報の取得方法
【課題】従来、一の車両に対応する他車両の位置を適切に取得できなかった。
【解決手段】車車間通信装置において利用される無線通信装置であって、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得部と、一の車両とは異なる他車両に設置された他の無線通信装置から、他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信部と、第一車両配置情報と第二車両配置情報とを用いて、他車両の一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得部と、車両配置関係情報を出力する車両配置関係情報出力部とを具備する無線通信装置により、一の車両に対応する他車両の位置を、適切に取得できる。
【解決手段】車車間通信装置において利用される無線通信装置であって、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得部と、一の車両とは異なる他車両に設置された他の無線通信装置から、他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信部と、第一車両配置情報と第二車両配置情報とを用いて、他車両の一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得部と、車両配置関係情報を出力する車両配置関係情報出力部とを具備する無線通信装置により、一の車両に対応する他車両の位置を、適切に取得できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、主として、自車両に対する他車両の相対的な位置情報を含む配置関係情報を取得する無線通信装置等に関するものである。
【背景技術】
【0002】
国土交通省が推進しているASV(先進安全自動車)では、車車間通信を予防安全向上に資する運転支援システムの実用化に取り組まれている。
【0003】
ASVで行われている検討では、事故数の多い事故4類型に、社会的要求として低減が期待される事故3類型を加えて合計7つの事故類型をピックアップしている。7つの事故類型とは、右折事故、出会い頭事故、歩行者事故、正面衝突事故、追突事故、左折事故、車線変更に伴う衝突事故である。ASVでは、かかる7つの事故類型で分類される事故の回避を中心として、安全な交通社会の実現を目指す取り組みが行われている。
【0004】
また、従来、マルチキャリアおよびマルチコードからなるチャネルを用いて、無線通信を行う無線通信装置があった(例えば、非特許文献1参照)。本無線通信装置は、レスポンス性劣化要因を大幅に削減するMM−SA(Multi−Carrier&Multi−Code Spread ALOHA)方式を採用する。MM−SA方式は、4個の周波数チャネルおよび15個の拡散コードによって掲載されるチャネルから、チャネル制御によって、干渉量の少ないチャネルを確立し、その確定したチャネルを用いて情報を送受信する方式である。
【非特許文献1】酒井敏宏、大山卓、鈴木龍太郎、門脇直人、小花貞夫、"高レスポンスアドホック無線通信方式:MM-SA方式の試作と性能評価"、信学技報, vol. 107, no. 113, RCS2007-13, pp. 13-18, 2007年6月
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の無線通信装置においては、一の車両に対応する他車両の位置を、適切に取得できなかった。
【0006】
特に、従来の無線通信装置においては、周辺車両から集められた情報である周辺車両情報を用いて、自律的に車両の方向位置を特定することがきでなかった。そのため、例えば、左折時に、横方向から接近してくる二輪車を巻き込むことを防止する支援を適切にできなかった。また、例えば、複数車線道路で、車線変更する際には、両側の車線で走行している後続車両にも注意を促すことが、適切にできなかった。
【課題を解決するための手段】
【0007】
本第一の発明の無線通信装置は、車車間通信装置において利用される無線通信装置であって、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得部と、前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信部と、前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得部と、前記車両配置関係情報を出力する車両配置関係情報出力部とを具備する無線通信装置である。
【0008】
かかる構成により、一の車両に対応する他車両の相対的な位置の情報を、適切に取得できる。
【0009】
また、本第二の発明の無線通信装置は、第一の発明に対して、前記車両配置関係情報取得部は、前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定手段を具備する無線通信装置である。
【0010】
かかる構成により、一の車両に対応する他車両の存在エリアを、適切に取得できる。
【0011】
また、本第三の発明の無線通信装置は、第二の発明に対して、前記車両配置関係情報取得部は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定手段をさらに具備する無線通信装置である。
【0012】
かかる構成により、一の車両に対応する他車両の存在エリア、および他車両の方向を、適切に取得できる。
【0013】
また、本第四の発明の無線通信装置は、第三の発明に対して、前記他車両存在方向特定手段は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して前方の先行する車両である前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して後方の後続する車両である後方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して右方向のエリアである右方向エリアである場合に、当該他車両が前記一の車両に対して右側を並走する車両である右側並走車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して左方向のエリアである左方向エリアである場合に、当該他車両が前記一の車両に対して左側を並走する車両である左側並走車両であることを示す車両配置関係情報を取得する無線通信装置である。
【0014】
かかる構成により、他車両の存在エリア、および他車両の進行方向を用いて、一の車両に対応する他車両の配置関係を、適切に取得できる。
【0015】
また、本第五の発明の無線通信装置は、第四の発明に対して、前記他車両存在方向特定手段は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか、逆方向であるか、いずれでもないかを判断し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して接近している対向車両である接近対向車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して通過した対向車両である通過対向車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無い場合に、当該他車両が前記一の車両に対して隣接対応車両であることを示す車両配置関係情報を取得する無線通信装置である。
【0016】
かかる構成により、他車両の存在エリア、および他車両の進行方向を用いて、一の車両に対応する他車両の配置関係を、適切に取得できる。
【0017】
また、本第六の発明の無線通信装置は、第四、第五いずれかの発明に対して、前記他車両存在方向特定手段は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアである右斜め前方エリアである場合に、当該他車両が前記一の車両に対して右斜め前方の先行する車両である右斜め前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め後方のエリアである右斜め後方エリアである場合に、当該他車両が前記一の車両に対して右斜め後方の後続する車両である右斜め後方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め前方のエリアである左斜め前方エリアであるに、当該他車両が前記一の車両に対して左斜め前方の先行する車両である左斜め前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアである左斜め後方エリアである場合に、当該他車両が前記一の車両に対して左斜め後方の後続する車両である左斜め後方車両であることを示す車両配置関係情報を取得する無線通信装置である。
【0018】
かかる構成により、他車両の存在エリア、および他車両の進行方向を用いて、一の車両に対応する他車両の配置関係を、より適切に取得できる。
【0019】
また、本第七の発明の無線通信装置は、第一から第六いずれかの発明に対して、前記車両配置関係情報出力部が出力した前記車両配置関係情報を受け付け、当該車両配置関係情報を用いて、マルチキャリアおよびマルチコードからなるチャネルにより、前記第一車両配置情報を送信する第一車両配置情報送信部をさらに具備する無線通信装置である。
【0020】
かかる構成により、マルチキャリアおよびマルチコードからなるチャネルを用いて、一の車両の車両配置情報を、他の車両に送信できる。
【発明の効果】
【0021】
本発明による無線通信装置によれば、一の車両に対応する他車両の位置を、適切に取得できる。
【発明を実施するための最良の形態】
【0022】
以下、無線通信装置等の実施形態について図面を参照して説明する。なお、実施の形態において同じ符号を付した構成要素は同様の動作を行うので、再度の説明を省略する場合がある。
【0023】
(実施の形態1)
【0024】
本実施の形態において、車車間通信において、他車両の相対的な位置情報を含む車両配置関係情報を取得し、当該車両配置関係情報を利用する無線通信装置等について説明する。本無線通信装置において、一の車両に対応する他車両の存在エリアを適切に特定したり、一の車両に対応する他車両の配置関係(先行車、後続車、対向車、並走車など)を特定したりできる。なお、車両とは、自動車、飛行機、電車、バス、自転車、二輪車などの移動体である。また、本実施の形態において、無線通信装置は、移動体(車両、人、生物など)が保持している(設置されている)状態であれば良い。
【0025】
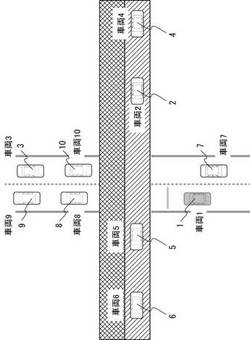
図1は、本実施の形態における無線ネットワークの概略図である。無線ネットワークは、無線通信装置1〜10を備える。無線通信装置1〜10は、それぞれ、車両1〜車両10に搭載されている。
【0026】
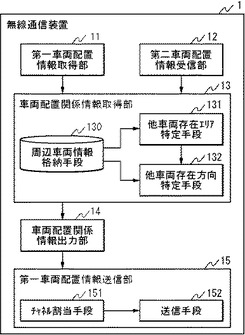
図2は、本実施の形態における無線通信装置1のブロック図である。無線通信装置1は、第一車両配置情報取得部11、第二車両配置情報受信部12、車両配置関係情報取得部13、車両配置関係情報出力部14、第一車両配置情報送信部15を具備する。
【0027】
車両配置関係情報取得部13は、周辺車両情報格納手段130、他車両存在エリア特定手段131、他車両存在方向特定手段132を具備する。
【0028】
第一車両配置情報送信部15は、チャネル割当手段151、送信手段152を具備する。
【0029】
第一車両配置情報取得部11は、第一車両配置情報を取得する。第一車両配置情報とは、一の車両の車両配置情報である。車両配置情報は、車両の走行に関する情報である。車両配置情報は、車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む。つまり、第一車両配置情報は、一の車両の位置情報と、一の車両の進行方向情報とを含む。また、第一車両配置情報は、通常、一の車両を識別する情報である車両IDを含む。第一車両配置情報取得部11は、例えば、GPS(Global Positioning System)受信装置で実現され得る。また、第一車両配置情報取得部11は、例えば、ビーコンや、その他の手段を用いて、第一車両配置情報を取得しても良い。また、ここでの取得とは、他の図示しない装置(例えば、種々の車両の車両配置情報を収集するサーバ装置など)からの受信でも良い。
【0030】
第二車両配置情報受信部12は、一の車両とは異なる他車両に設置された他の無線通信装置(適宜、「他車両」とも言う。)から、他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する。なお、第二車両配置情報は、通常、他車両を識別する情報である車両IDを含む。第二車両配置情報受信部12は、通常、定期的に第二車両配置情報を受信する。ただし、定期的とは、正確に、同時間間隔でなければならない趣旨ではない。また、第二車両配置情報受信部12が第二車両配置情報を受信するタイミングは、定期的で無くても良い。他の無線通信装置からの受信は、直接的な受信でも、他の装置を経由した間接的な受信でも良い。また、第二車両配置情報受信部12は、通常、パケット化され、変調された第二車両配置情報を受信する。また、第二車両配置情報は、通常、受信後に復調される。また、第二車両配置情報受信部12は、通常、すべての周波数チャネルの情報(パケット)を受信する。第二車両配置情報受信部12は、通常、無線通信手段で実現されるが、放送を受信する手段で実現されても良い。第二車両配置情報受信部12は、例えば、MM−SA方式により、第二車両配置情報を受信する。
【0031】
車両配置関係情報取得部13は、第一車両配置情報と第二車両配置情報とを用いて、車両配置関係情報を取得する。また、車両配置関係情報取得部13は、第一車両配置情報と第二車両配置情報とを、通常、周辺車両情報格納手段130に、少なくとも一時蓄積する。車両配置関係情報は、他車両の一の車両に対する相対的な位置関係を含む情報である。また、車両配置関係情報は、他車両の一の車両に対する相対的な走行に関する情報である。車両配置関係情報とは、例えば、一の車両に対して、他車両が先行車であることを示す情報(例えば、「a」)、他車両が後続車であることを示す情報(例えば、「b」)、他車両が対向車であることを示す情報(例えば、「c」)、他車両が並走車であることを示す情報(例えば、「d」)などである。また、車両配置関係情報は、例えば、一の車両に対して、右側を並走する車両である右側並走車両であることを示す情報、一の車両に対して左側を並走する車両である左側並走車両であることを示す情報、一の車両に対して接近している対向車両である接近対向車両であることを示す情報、または、一の車両に対して通過した対向車両である通過対向車両であることを示す情報などでも良い。また、車両配置関係情報とは、例えば、一の車両に対する他車両の存在エリアを識別するエリア識別子を有する。存在エリアを識別するエリア識別子は、例えば、他車両が一の車両に対して前方に存在することを示す前方識別子(例えば、「1」)、他車両が一の車両に対して後方に存在することを示す後方識別子(例えば、「2」)、他車両が一の車両に対して右方向に存在することを示す右方向識別子(例えば、「3」)、他車両が一の車両に対して左方向に存在することを示す左方向識別子(例えば、「4」)である。また、存在エリアを識別するエリア識別子は、以下の8つ、存在することは好適である。8つのエリア識別子は、他車両が一の車両に対して前方に存在することを示す前方識別子(例えば、「1」)、他車両が一の車両に対して後方に存在することを示す後方識別子(例えば、「2」)、他車両が一の車両に対して右方向に存在することを示す右方向識別子(例えば、「3」)、他車両が一の車両に対して右斜め前方に存在することを示す右斜め前方識別子(例えば、「4」)、他車両が一の車両に対して右斜め後方に存在することを示す右斜め後方識別子(例えば、「5」)、他車両が一の車両に対して左方向に存在することを示す左方向識別子(例えば、「6」)他車両が一の車両に対して左斜め前方に存在することを示す左斜め前方識別子(例えば、「7」)、他車両が一の車両に対して左斜め後方に存在することを示す左斜め後方識別子(例えば、「8」)である。
【0032】
車両配置関係情報取得部13は、通常、MPUやメモリ等から実現され得る。車両配置関係情報取得部13の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0033】
周辺車両情報格納手段130は、一の車両に関する情報である自車両情報、および他車両(1以上、存在しても良い)に関する情報である他車両情報(適宜、「周辺車両情報」とも言う。)を格納し得る。自車両情報は、第一車両配置情報取得部11が取得した第一車両配置情報を含む。また、他車両情報は、第二車両配置情報受信部12が受信した第二車両配置情報を含む。周辺車両情報格納手段130は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。
【0034】
他車両存在エリア特定手段131は、第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、第一車両配置情報が有する位置情報と第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する。なお、他車両存在エリア特定手段131が分割するエリアは、4であることが好適である。また、他車両存在エリア特定手段131が分割するエリアは、8であることがさらに好適である。また、エリアは、一の車両の位置情報が示す位置(原点)を中心とした、扇形に外に広がる領域である。また、分割するエリアが2の場合は、通常、「前方」「後方」のエリアである。分割するエリアが4の場合は、通常、「前方」「後方」「右方向」「左方向」である。分割するエリアが8の場合は、通常、「前方」「後方」「右方向」「右斜め前方」「右斜め後方」「左方向」「左斜め前方」「左斜め後方」である。他車両存在エリア特定手段131は、通常、MPUやメモリ等から実現され得る。他車両存在エリア特定手段131の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0035】
他車両存在方向特定手段132は、第一車両配置情報が有する進行方向情報、第二車両配置情報が有する進行方向情報、および他車両存在エリア特定手段131が取得したエリア識別子を用いて、一の車両と他車両との車両配置関係を示す車両配置関係情報を取得する。車両配置関係情報とは、例えば、他車両が先行車(例えば、「1」)であることを示す情報、他車両が後続車(例えば、「2」)であることを示す情報、他車両が対向車(例えば、「3」)であることを示す情報、他車両が並走車(例えば、「4」)であることを示す情報などを示す情報である。
【0036】
また、他車両存在方向特定手段132は、第一車両配置情報が有する進行方向情報、第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断する。また、他車両存在方向特定手段132は、第一車両配置情報が有する進行方向情報、第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか、逆方向であるか、いずれでもないかを判断することは、さらに好適である。なお、同一方向とは、例えば、一の車両の進行方向情報が示すベクトルの向きに対して、他車両の進行方向情報が示すベクトルの向きが「+−15度」の範囲であることを言う。また、逆方向とは、例えば、一の車両の進行方向情報が示すベクトルと180度異なるベクトルの向きに対して、他車両の進行方向情報が示すベクトルの向きが「+−15度」の範囲であることを言う。
【0037】
そして、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが前方エリアである場合に、当該他車両が一の車両に対して前方の先行する車両であることを示す前方車両であることを示す車両配置関係情報を取得する。前方エリアとは、例えば、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが後方エリアである場合に、当該他車両が前記一の車両に対して後方の後続する車両であることを示す後方車両であることを示す車両配置関係情報を取得する。なお、後方エリアとは、例えば、前方エリアに対して180度分ずらしたエリア群である。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、前方エリアでも無く、後方エリアでも無く、右方向エリアである場合に、当該他車両が一の車両に対して右側を並走する車両であることを示す右側並走車両であることを示す車両配置関係情報を取得する。右方向エリアは、他車両の位置が第一車両配置情報の有する位置情報が示す位置に対して右方向のエリアである。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131によって特定された存在エリアが左方向エリアである場合に、当該他車両が前記一の車両に対して左側を並走する車両であることを示す左側並走車両であることを示す車両配置関係情報を取得する。左方向エリアとは、前方エリアでも無く、前記後方エリアでも無く、第一車両配置情報が有する位置情報が示す位置に対して左方向のエリアである。
【0038】
また、他車両存在方向特定手段132は、逆方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して接近している対向車両である接近対向車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、逆方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して通過した対向車両である通過対向車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、逆方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、前方エリアでも無く、後方エリアでも無い場合に、当該他車両が一の車両に対して隣接対応車両であることを示す車両配置関係情報を取得する。
【0039】
また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアである右斜め前方エリアである場合に、当該他車両が前記一の車両に対して右斜め前方の先行する車両である右斜め前方車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、第一車両配置情報が有する位置情報が示す位置の右斜め後方のエリアである右斜め後方エリアである場合に、当該他車両が前記一の車両に対して右斜め後方の後続する車両である右斜め後方車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、第一車両配置情報が有する位置情報が示す位置の左斜め前方のエリアである左斜め前方エリアであるに、当該他車両が前記一の車両に対して左斜め前方の先行する車両である左斜め前方車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアである左斜め後方エリアである場合に、当該他車両が前記一の車両に対して左斜め後方の後続する車両である左斜め後方車両であることを示す車両配置関係情報を取得する。
【0040】
他車両存在方向特定手段132は、通常、MPUやメモリ等から実現され得る。他車両存在方向特定手段132の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0041】
車両配置関係情報出力部14は、車両配置関係情報を出力する。ここで、出力とは、ディスプレイへの表示、プロジェクターを用いた投影、プリンタへの印字、音出力、外部の装置への送信、記録媒体への蓄積、他の処理装置や他のプログラム等への処理結果の引渡し等を含む概念である。さらに具体的には、出力とは、一の車両のディスプレイへの表示(例えば、先行車、後続車、対向車、並走車などの図的な表示)、後続車、対向車、並走車等の存在について、注意喚起するための音出力なども含む概念である。また、出力とは、車両の制御プログラムへの車両配置関係情報の引き渡しでも良い。車両配置関係情報出力部14は、第一車両配置情報送信部15に車両配置関係情報を引き渡すだけの動作の場合もあり得る。車両配置関係情報出力部14は、ディスプレイやスピーカー等の出力デバイスを含むと考えても含まないと考えても良い。車両配置関係情報出力部14は、例えば、出力デバイスのドライバーソフトまたは、出力デバイスのドライバーソフトと出力デバイス等で実現され得る。
【0042】
第一車両配置情報送信部15は、車両配置関係情報出力部14が出力した車両配置関係情報を受け付け、当該車両配置関係情報を用いて、第一車両配置情報を送信する。第一車両配置情報送信部15は、通常、第一車両配置情報をパケット化し、かつ、変調して送信する。第一車両配置情報送信部15は、第一車両配置情報を、他車両に送信する。第一車両配置情報送信部15は、例えば、マルチキャリアおよびマルチコードからなるチャネルを用いて、第一車両配置情報を有するパケットの送信を行う。第一車両配置情報送信部15は、通常、無線通信手段で実現されるが、放送手段で実現されても良い。
【0043】
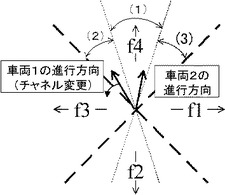
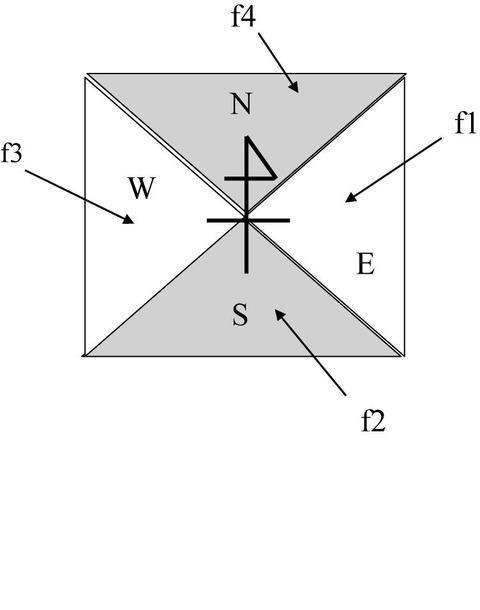
チャネル割当手段151は、車両配置関係情報取得部13が取得した車両配置関係情報を用いて、チャネル割り当てを行う。チャネル割当手段151は、例えば、以下のようにチャネル割り当てを行う。図3は、周波数チャネルの基本割当について示した図である。基本割当状態(図3)では、真北を基準に±45度範囲の割り当て周波数は「f4」、真東を基準に±45度範囲の割り当て周波数は「f1」、真南を基準に±45度範囲の割り当て周波数は「f2」、真南を基準に±45度範囲の割り当て周波数は「f3」と決められている、とする。そして、基本割当ルールとして、f2はf4の対向車線用、f3はf1の対向車線用とする。
【0044】
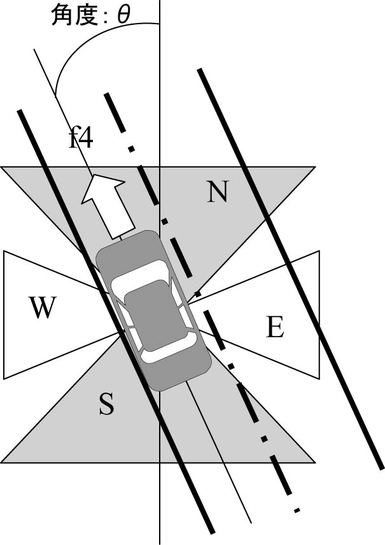
そして、以下に、東西南北に整備されていない道路において、チャネル割当手段151が周波数チャネルを割り当てるアルゴリズムについて説明する。図4に示す様に、道路が真北を基準に角度θの傾きがあった場合、チャネル割当手段151は、例えば、4つの周波数に分けて、周波数チャネルを選択する。しかしながら、交差道路は必ずしも、90度で交差している分けではなく、鋭角で交差する道路も存在する。その場合、基本割当状態では、走行している道路は異なるが、同一の周波数を割当てしまうことになる。これを避ける方法を、図5および図6を用いて説明する。ここで、真北を中心に±45度範囲に2つの車両が同一の周波数f4を使用している場合を例に示す。チャネル割当手段151は、自律的に制御する際の優先順位を「(1)>(2)>(3)」とする、とする。ここで、(1)、(2)、(3)は、図5に示す様に、真北を0度とすると、(1)(0度〜15度)範囲と(345度〜360度(0度))範囲、(2)(315度〜345度)範囲、(3)(15度〜45度)範囲である。
【0045】
図5は、車両1の進行方向は(2)の範囲、車両2の進行方向は(1)の場合の例を示したものである。この場合、(1)に存在する車両2の優先順位が高いので、チャネル割当手段151は、車両1の使用チャネルをf4から、f3へ変更する。
【0046】
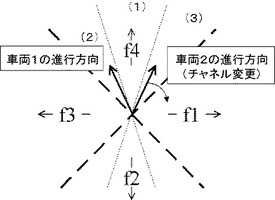
図6は、車両1の進行方向は(2)、車両2の進行方向は(3)の場合の例を示している。この場合、優先順位条件から、車両2の方の優先順位が低いことから、チャネル割当手段151は、車両2の使用チャネルをf4からf1へ変更する。なお、かかるチャネル割当手段151の周波数の決定方法、および周波数は、一例であり、これらに制限されるものではないことは言うまでもない。
【0047】
送信手段152は、チャネル割当手段151が決定した周波数で、第一車両配置情報(パケット)を他車両に送信する。送信手段152は、例えば、MM−SA方式により、第一車両配置情報を受信する。送信手段152は、通常、無線通信手段で実現されるが、放送手段で実現されても良い。
【0048】
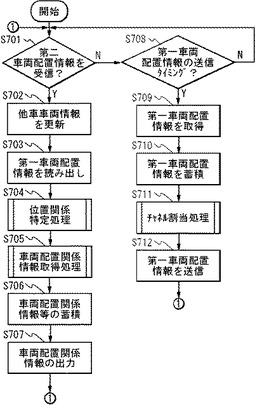
次に、無線通信装置1の動作について図7のフローチャートを用いて説明する。
【0049】
(ステップS701)第二車両配置情報受信部12は、他車両から、第二車両配置情報を受信したか否かを判断する。第二車両配置情報を受信すればステップS702に行き、第二車両配置情報を受信しなければステップS708に行く。
【0050】
(ステップS702)車両配置関係情報取得部13は、ステップS701で受信された第二車両配置情報を用いて、周辺車両情報格納手段130に格納されている第二車両配置情報であり、受信された第二車両配置情報に対応する第二車両配置情報を更新する。
【0051】
(ステップS703)車両配置関係情報取得部13は、周辺車両情報格納手段130に格納されている第一車両配置情報を読み出す。
【0052】
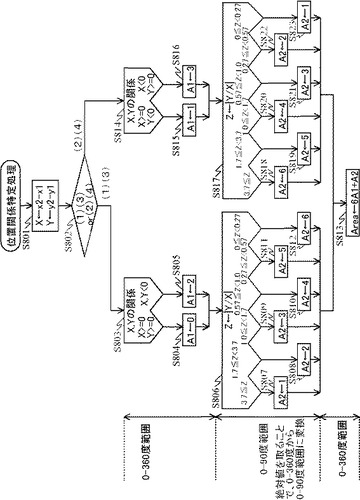
(ステップS704)車両配置関係情報取得部13は、ステップS703で読み出した第一車両配置情報、およびステップS701で受信された第二車両配置情報を用いて、位置関係特定処理を行う。位置関係特定処理とは、一の車両と他車両との位置関係を特定する処理である。位置関係特定処理について、図8のフローチャートを用いて説明する。
【0053】
(ステップS705)車両配置関係情報取得部13は、車両配置関係情報取得処理を行う。車両配置関係情報取得処理について、図12のフローチャートを用いて説明する。
【0054】
(ステップS706)車両配置関係情報取得部13は、ステップS705で取得した車両配置関係情報等を、周辺車両情報格納手段130に蓄積する。
【0055】
(ステップS707)車両配置関係情報出力部14は、ステップS705で取得した車両配置関係情報を出力する。
【0056】
(ステップS708)第一車両配置情報送信部15は、第一車両配置情報を送信するタイミングであるか否かを判断する。第一車両配置情報を送信するタイミングであればステップS709に行き、第一車両配置情報を送信するタイミングでなければステップS701に戻る。第一車両配置情報送信部15は、定期的に第一車両配置情報を送信しても良いし、何らかのイベントをトリガーにして、第一車両配置情報を送信しても良い。何らかのイベントとは、例えば、ユーザがウィンカー(右または左)の上げた(指示した)こと、ブレーキを踏んだこと等の自動車の操作(特に、他車両に影響する可能性のある特定の操作)であることは好適である。
【0057】
(ステップS709)第一車両配置情報送信部15は、周辺車両情報格納手段130から、第一車両配置情報を取得する。
【0058】
(ステップS710)第一車両配置情報送信部15は、第一車両配置情報を含む自車両情報を構成し、蓄積する。
【0059】
(ステップS711)車両配置関係情報出力部14は、車両配置関係情報、第一車両配置情報等を、チャネル割当手段151に渡す。そして、チャネル割当手段151は、車両配置関係情報等を用いて、チャネル割当処理を行う。チャネル割当処理の例については、既に説明したので、その詳細な説明は省略する。
【0060】
(ステップS712)送信手段152は、ステップS714で割り当てられた周波数チャネルを用いて、第一車両配置情報を他車両に送信する。ステップS701に戻る。
【0061】
なお、図7のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
【0062】
次に、ステップS704の位置関係特定処理について、図8のフローチャートを用いて説明する。
【0063】
まず、他車両存在エリア特定手段131は、第一車両配置情報から、一の車両(ここでは、自車両とも言う)の位置を示す位置情報(x1,y1)を取得する。また、他車両存在エリア特定手段131は、第二車両配置情報から、他車両の位置を示す位置情報(x2,y2)を取得する。そして、他車両存在エリア特定手段131は、自車両と他車両の位置の差を算出する。自車両と他車両の位置の差は、「X=x2−x1」および「Y=y2−y1」により、算出できる(ステップS801)。なお、他車両存在エリア特定手段131は、上記算出式に関する情報をあらかじめ保持している、とする。
【0064】
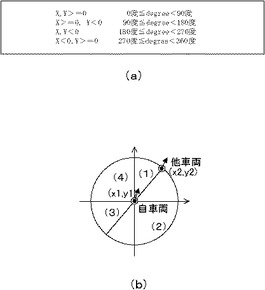
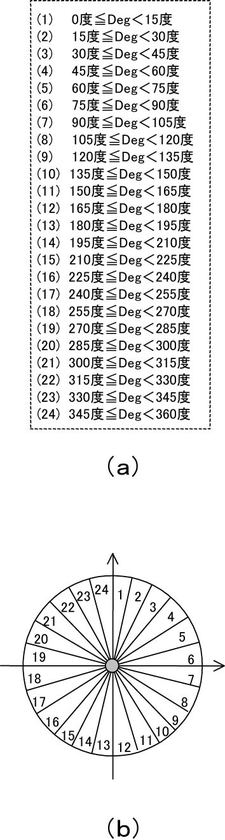
次に、他車両存在エリア特定手段131は、ステップS801で算出したX,およびYの符号から、図9(a)に従って、他車両の存在エリアの領域の角度(degree)を判断する。そして、角度に応じて、他車両の存在エリアが、図9(b)の(1)から(4)のいずれの領域であるかを判断する。つまり、例えば、まず、他車両存在エリア特定手段131は、「X・Y(XとYの積)」が正であるか、負であるかを判断する(ステップS802)。そして、正であれば(他車両の領域が(1)または(3)であれば)、ステップS803に行き、負であれば(他車両の領域が(2)または(4)であれば)、ステップS814に行く。なお、角度について、原点(自車両の位置)から北方向(上方向)が0度である、とする。
【0065】
そして、次に、他車両存在エリア特定手段131は、「X>=0かつY>=0」であれば他車両の領域が(1)、「X<0かつY<0」であれば他車両の領域が(3)であると判断する(ステップS803,S804,S805)。また、他車両存在エリア特定手段131は、「X>=0かつY<0」であれば他車両の領域が(2)、「X<0かつY>=0」であれば他車両の領域が(4)であると判断する(ステップS814,S815,S816)。なお、領域(1)は数値「0」、領域(2)は数値「1」、領域(3)は数値「2」、領域(4)は数値「3」に対応する。そして、他車両存在エリア特定手段131は、図8のステップS804、S805、S815、S816において、変数A1に、領域を識別する数値を代入している。ここまでで、他車両存在エリア特定手段131は、他車両が、90度単位のどのエリアに存在するかを絞り込んだことになる。なお、他車両存在エリア特定手段131が、ここまでで処理を終了した場合、他車両の存在エリアを4つのうちのいずれかであるかを決定できることとなる。
【0066】
以下、さらに、他車両存在エリア特定手段131が、他車両の存在エリアを24通りのうちのいずれであるかを決定するための処理の例について説明する。
【0067】
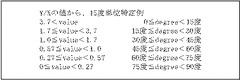
他車両存在エリア特定手段131は、90度(上記の(1)から(4)のいずれかのエリア)を15度単位で区切り、さらに6エリアに分割して、他車両の存在エリアを特定する。今、他車両が0度から90度の範囲に存在する場合について、述べる(図8参照)。図10に、そのアルゴリズム(考え方)を記載している。他車両存在エリア特定手段131は、「Z=Y/X」を算出し(XとYとの比(Z)を算出し)、当該Zの値(図10のValue)に応じて、図10に従って、他車両の存在エリアを取得する。つまり、図8のフローチャートのS806,S817の分岐により、変数A2にエリアを識別するエリア識別子「1」から「6」のいずれかが代入される。そして、他車両存在エリア特定手段131は、変数A1およびA2を用いて、24の領域のいずれかを示すエリア識別子を取得する。ここでは、他車両存在エリア特定手段131は、式「Area=6A1+A2」に、A1,A2を代入することにより、エリア識別子(Area)を取得する。なお、かかる処理により、他車両存在エリア特定手段131は、図11に示すように、他車両の存在エリアを、24エリアのいずれかのエリアに決定する。
【0068】
なお、図8のフローチャートにおいて、存在エリアを15度単位に分割しているが、10度単位でエリア分割しても良い。また、図8のフローチャートにおいて、まず、90度単位にエリア分割し、その90度の中で、15度単位に分割し、最終的に24エリア(360度)中のどのエリアかを判別している。よって、上記の例では、90度分割、15度分割の2段階で判別しているが、エリア数をもっと多くして、1つのエリア角度を小さくしたい場合には、3段階で判別しても良い。よって、この例で示している数値は例示であることは言うまでもない。本例において、例えば、ハードウェア上での演算を考え、第一のステップで90度単位に分割し、第二のステップで15度単位に絞り込んでいるが、ハードウェア実装設計で、ステップ数を増やしても良いし、減らしても良いことは言うまでもない。
【0069】
次に、ステップS705の車両配置関係情報取得処理について、図12のフローチャートを用いて説明する。
【0070】
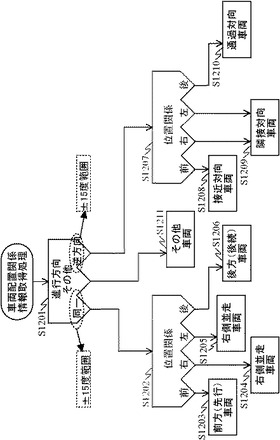
図8の位置関係特定処理によって、他車両が存在するエリアを特定した後、他車両存在方向特定手段132は、自車両と他車両との進行方向が同一方向か、あるいは逆方向か、あるいはその他かを判別する(ステップS1201)。ここで、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する進行方向情報が示す進行方向と他車両から受信した第二車両配置情報(パケット)中に含まれている進行方向情報が示す進行方向を比較して、±15度範囲であれば、同一方向とする。また、両進行方向が180度±15度範囲であれば、他車両存在方向特定手段132は、逆方向と判別する。他車両存在方向特定手段132は、「同一方向」、「逆方向」以外は、「その他」と判断する。そして、「同一方向」である場合はステップS1202に行き、「逆方向」である場合はステップS1207に行き、「その他」である場合はステップS1211に行く。
【0071】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する位置情報と、他車両から受信した第二車両配置情報中に含まれている位置情報とを比較し、他車両が「前」に存在するか、「右」に存在するか、「左」に存在するか、「後」に存在するかを判断する(ステップS1202)。
【0072】
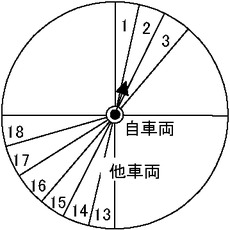
そして、例えば、他車両存在方向特定手段132は、同一方向を走行している他車両に対しては、自車両の進行方向(15度角度エリア)に左右1エリアずつを含めたエリア(図13の1、2、3のエリア)に他車両が存在していれば、位置関係が「前」であり、当該他車両を前方車両と判定する(ステップS1203)。また、他車両存在方向特定手段132は、自車両の進行方向に180度を加えたエリアに更に左右1エリアずつを含めたエリア(図13の13、14、15)に存在し、進行方向が1、2、3のエリアであれば、位置関係が「後」であり、当該他車両を後方車両と判定する(ステップS1206)。また、他車両存在方向特定手段132は、前方、後方にも属さないエリアは、右方向エリアと左方向エリアに分割し、他車両が同一進行方向かつ右方向であれば右側並走車両(ステップS1204)、他車両が同一進行方向かつ左方向に存在するのであれば左側並走車両と判定する(ステップS1205)。
【0073】
次に、他車両存在方向特定手段132は、逆方向を走行している他車両(対向車両)に対しては、同様に位置関係を取得し、位置関係が「前」であれば、当該他車両を接近対向車両と判定する(ステップS1208)。また、位置関係が「後」であれば、他車両存在方向特定手段132は、当該他車両を通過対向車両と判定する(ステップS1210)。
【0074】
さらに、他車両存在方向特定手段132は、他車両が対向車両であり、位置関係が「前」でも「後」ででも無い場合は、左右判定は行わずに、他車両を隣接対向車両(ステップS1209)と判定する。
【0075】
なお、かかる他車両存在方向特定手段132の判断方法は一例であることは言うまでもない。従って、他車両存在方向特定手段132は、図13において、15度ずつ、エリアを分割したが、例えば、20度ずつでも良い。なお、他車両存在方向特定手段132は、他車両存在エリア特定手段131が取得したエリア識別子を用いて、他車両が「前」に存在するか、「右」に存在するか、「左」に存在するか、「後」に存在するかを判断することは好適である。
【0076】
次に、ステップS715のチャネル割当処理について説明する。チャネル割当手段151は、例えば、以下のように、一の車両に割り当てる周波数チャネルを決定する。一の車両に割り当てる周波数チャネルとは、送信手段152が第一車両配置情報(パケット)を他車両に送信する周波数チャネルである。
【0077】
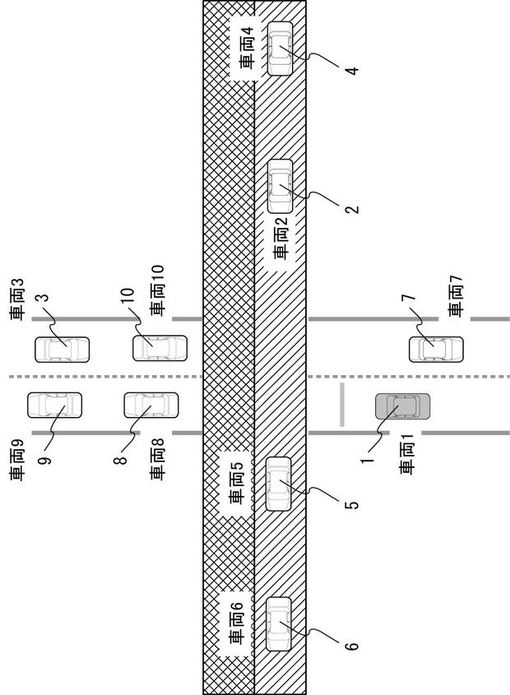
通常、チャネル割当手段151は、一の車両が走行している車線に対して、割り当てられている周波数チャネルを取得する。そして、チャネル割当手段151は、取得した周波数チャネルが、他と重複しないか否かを判断し、重複しなければ、そのまま、取得した周波数チャネルを、利用する周波数チャネルとして決定する。例えば、今、図14に車車間通信アプリケーションの1つである出会い頭衝突防止の車両配置例を示す。車両1が受信車両(一の車両)であり、車両2が所望の送信車両(他車両)である。図14に示す様に、周波数チャネル制御を行なうと、出会い頭事故防止で対象とすべき車線は車線2で周波数チャネルf2となる。そこで、チャネル割当手段151は、受信車両(一の車両)に割当てられた周波数チャネルf4を、利用する周波数チャネルとして決定する。そして、送信手段152は、周波数チャネルf4で、第一車両配置情報を、MM−SA方式で他車両に送信する。なお、図14において、受信車両(一の車両)は、受信側サービスエリアに存在する場合に、送信側サービスエリアに存在する送信車両(他車両)からの第二車両配置情報を受信する。かかることは、他の図面を用いた説明でも同様である。
【0078】
次に、図15に車車間通信アプリケーションの別のアプリケーションである右折事故の車両配置例を示す。車両1が受信車両(一の車両)であり、車両2が所望の送信車両(他車両)である。図15の右折事故防止例の場合、受信車両に割当てられた周波数チャネルはf1に対し、右折事故防止アプリケーションの送信車両対象車線に割当てられたチャネルはf2である。そして、チャネル割当手段151は、受信車両(一の車両)に割当てられた周波数チャネルf1を取得する。そして、送信手段152は、周波数チャネルf1で、第一車両配置情報を、MM−SA方式で他車両に送信する。
【0079】
また、チャネル割当手段151は、上述したように、割り当てられた周波数チャネルが、他車両が利用する周波数チャネルと重複する場合、例えば、以下のようにチャネル割り当てを行う。図3は、周波数チャネルの基本割当について示した図である。基本割当状態(図3)では、真北を基準に±45度範囲の割り当て周波数は「f4」、真東を基準に±45度範囲の割り当て周波数は「f1」、真南を中心に±45度範囲の割り当て周波数は「f2」、真南を中心に±45度範囲の割り当て周波数は「f3」と決められている、とする。そして、基本割当ルールとして、f2はf4の対向車線用、f3はf1の対向車線用とする。
【0080】
そして、以下に、東西南北に整備されていない道路において、チャネル割当手段151が周波数チャネルを割り当てるアルゴリズムについて説明する。図4に示す様に、道路が真北を基準に角度θの傾きがあった場合、チャネル割当手段151は、例えば、4つの周波数に分けて、周波数チャネルを選択する。しかしながら、交差道路は必ずしも、90度で交差している分けではなく、鋭角で交差する道路も存在する。その場合、基本割当状態では、走行している道路は異なるが、同一の周波数を割当てしまうことになる。これを避ける方法を、図5および図6を用いて説明する。真北を基準に±45度範囲に2つの車両が同一の周波数f4を使用している場合を例に示す。チャネル割当手段151は、自律的に制御する際の優先順位を「(1)>(2)>(3)」とする、とする。
【0081】
図5は、車両1の進行方向は(2)の範囲、車両2の進行方向は(1)の場合の例を示したものである。この場合、(1)に存在する車両2の優先順位が高いので、チャネル割当手段151は、車両1の使用チャネルをf4から、f3へ変更する。図6は、車両1の進行方向は(2)、車両2の進行方向は(3)の場合の例を示している。この場合、優先順位条件から、車両2の方の優先順位が低いことから、チャネル割当手段151は、車両2の使用チャネルをf4からf1へ変更する。
【0082】
以下、本実施の形態における無線通信装置1の具体的な2つの動作について説明する。
(具体例1)
【0083】
図16を用いて、一の車両(車両4)が車線変更を行う場合の例について説明する。このとき、右方向であっても、最も視認の困難な右斜め後方への対応が重要となり、その対応支援のためにより細かい車両位置関係の特定が必要である。
【0084】
まず、第二車両配置情報受信部12は、他車両(車両2)から、他車両の位置情報(x2,y2)と進行方向情報(X2)とを含む第二車両配置情報を受信する。ここで、第二車両配置情報は、車両識別子(車両ID)、位置情報、シーケンス番号、進行方向情報を有する。また、車両2(車両ID=ID2)の位置情報は、位置(x2,y2)、方位(D2)、速度(V2)を含む。方位とは、車両2が向いている方角を示す情報である。速度とは、車両2の走行速度を示す情報である。また、シーケンス番号とは、第二車両配置情報を有するパケットが生成される場合に割り当てられる生成順を示す続き番号である。なお、通常、シーケンス番号が大きい値であるほど、パケットが新しいものである。また、進行方向情報は、例えば、真北を基準(0度)として、何度方向に向いているかを示す情報であり、通常、単位は度(分などの、さらに細かい単位を含んでも良い)である。
【0085】
そして、車両配置関係情報取得部13は、第二車両配置情報受信部12が受信した第二車両配置情報を用いて、他車両情報を構成する。つまり、車両配置関係情報取得部13は、車両配置関係情報取得部13は、第二車両配置情報に、当該第二車両配置情報が受信された時刻(T2)、自車両と他車両の相対距離(R2)、周波数チャネル(f1)、拡散符号(C2)を加え、他車両情報を構成する。そして、車両配置関係情報取得部13は、車両ID「ID2」に対応する他車両情報を更新する。更新対象の車両配置関係情報は、周辺車両情報格納手段130に格納されている。なお、時刻(T2)は、例えば、車両配置関係情報取得部13が保持している図示しない時計から取得された情報である。相対距離(R2)は、自車両の位置情報(経度,緯度)および他車両の位置情報(経度,緯度)を用いて算出された情報である。相対距離の算出方法は公知技術である。周波数チャネル(f1)は、第二車両配置情報を受信した周波数CHである。拡散符号(C2)は、物理層において受信したパケットを逆拡散するために用いた拡散符号を、物理層より上の層に通知することにより取得され得る。
【0086】
つまり、周辺車両情報格納手段130は、図17の周辺車両情報管理表を保持している。周辺車両情報管理表は、自車両情報(「車両ID=ID4」の情報)、および他車両情報(「車両ID=ID1,ID2,ID3」の情報)を管理している。自車両情報、および他車両情報は、「車両ID」「時刻」「位置情報」「シーケンス番号」「方向」「相対距離」「周波数CH」「拡散符号CH」を有する。なお、図17において、車両ID「ID2」のレコードは、上述した処理により更新されたレコードである。
【0087】
次に、第一車両配置情報取得部11は、図17の周辺車両情報管理表から、自車両(ID4)に対応する第一車両配置情報を読み出す。
【0088】
次に、車両配置関係情報取得部13は、「車両ID=ID2」に対応する第二車両配置情報を、図17の周辺車両情報管理表から、読み出す。
【0089】
そして、車両配置関係情報取得部13は、第一車両配置情報、および第二車両配置情報を用いて、以下のように、位置関係特定処理を行う。
【0090】
まず、他車両存在エリア特定手段131は、第一車両配置情報から、一の車両(ここでは、自車両とも言う)の位置を示す位置情報(x4,y4)を取得する。また、他車両存在エリア特定手段131は、第二車両配置情報から、他車両の位置を示す位置情報(x2,y2)を取得する。
【0091】
そして、他車両存在エリア特定手段131は、自車両と他車両の位置の差「X=x2−x4」「Y=y2−y4」を算出する。
【0092】
次に、他車両存在エリア特定手段131は、算出したX,およびYの符号から、図9(a)に従って、他車両の存在エリアの領域の角度(degree)を判断する。ここで、他車両存在エリア特定手段131は、他車両(車両4)の領域を(2)「90〜180度」であると判断した、とする。
【0093】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する進行方向情報(X4)が示す進行方向と他車両から受信した第二車両配置情報(パケット)中に含まれている進行方向情報(X2)が示す進行方向を比較して、±15度範囲であるので、自車両と他車両の進行方向は同一方向と、判断する。
【0094】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する位置情報(x4,y4)と、他車両から受信した第二車両配置情報中に含まれている位置情報(x2,y2)とを比較する。そして、右斜め前方、右方向、右斜め後方のいずれかのうち、他車両存在方向特定手段132は、他車両(車両4)の領域を「右斜め後方」と判断した、とする。この判断方法は、上述した判断方法の数値(角度)を変更すれば可能であるので、詳細な説明を省略する(図16参照)。そして、他車両存在方向特定手段132は、両車両の進行方向が同一方向であり、かつ、他車両の存在エリアが、第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアであるので、当該他車両が前記一の車両に対して右斜め前方の先行する車両であることを示す右斜め前方車両であることを示す車両配置関係情報を取得する。なお、他車両の存在エリアが右斜め前方エリアであることを取得する処理は、他車両存在エリア特定手段131が行っても良い。
【0095】
次に、車両配置関係情報出力部14は、取得された車両配置関係情報「右斜め前方車両」を出力する。ここでの出力は、例えば、自車両の運転者への注意喚起(右斜め後方に他車両が存在する旨の表示、右斜め後方に他車両が存在することを知らせる音(ブザー音など)の出力など)を行っても良い。
【0096】
次に、チャネル割当手段151は、例えば、車線2に割り当てられた周波数f3を取得する。そして、周波数f3は、他車両の送信周波数f1とは異なるので、送信手段152は、周波数チャネルf3を用いて、第一車両配置情報を他車両に送信する。
【0097】
次に、自車両の運転者は、右にウィンカーを出して、車線変更しようとする、とする。すると、「右斜め後方」の存在する車両ID「ID2」の車両を検知されているので、車両配置関係情報出力部14は、自車両の運転者への注意喚起(右斜め後方に他車両が存在する旨の表示、右斜め後方に他車両が存在することを知らせる音(ブザー音など)の出力など)を行う。
【0098】
以上の処理により、車線変更時の事故防止を図ることができる。また、本具体例において、右方向エリアを3エリア「右斜め前方エリア」、「右方向エリア」、「右斜め後方エリア」にさらに詳細に分割し、左方向エリアを3エリア「左斜め前方エリア」、「左方向エリア」、「左斜め後方エリア」に分割した。かかる処理により、より細かい制御が可能となった。
(具体例2)
【0099】
図18を用いて、二輪車の左折巻き込み防止のアプリケーションの例を示したものである。かかる場合には、後続車両という情報だけでなく、横方向走行(並走)という情報も必要になってくる。
【0100】
まず、第二車両配置情報受信部12は、他車両(二輪車[車両ID=ID3])から、他車両の位置情報(x3,y3)と進行方向情報(X3)とを含む第二車両配置情報を受信する、とする。ここで、第二車両配置情報は、車両識別子(車両ID)、位置情報、シーケンス番号、進行方向情報を有する。また、車両3(車両ID=ID3)の位置情報は、位置(x3,y3)、方位(D3)、速度(V3)を含む。
【0101】
そして、車両配置関係情報取得部13は、第二車両配置情報受信部12が受信した第二車両配置情報を用いて、他車両情報を構成する。つまり、車両配置関係情報取得部13は、第二車両配置情報に、当該第二車両配置情報が受信された時刻(T3)、自車両と他車両の相対距離(R3)、周波数チャネル(f3)、拡散符号(C3)を加え、他車両情報を構成する。そして、車両配置関係情報取得部13は、図17の周辺車両情報管理表の他車両情報であり、車両ID「ID3」に対応する他車両情報を更新する。更新対象の車両配置関係情報は、周辺車両情報格納手段130に格納されている。なお、時刻(T3)は、例えば、車両配置関係情報取得部13が保持している図示しない時計から取得された情報である。
【0102】
次に、第一車両配置情報取得部11は、図17の周辺車両情報管理表から、自車両(ID4)に対応する第一車両配置情報を読み出す。
【0103】
次に、車両配置関係情報取得部13は、「車両ID=ID3」に対応する第二車両配置情報を、図17の周辺車両情報管理表から、読み出す。
【0104】
そして、車両配置関係情報取得部13は、第一車両配置情報、および第二車両配置情報を用いて、以下のように、位置関係特定処理を行う。
【0105】
まず、他車両存在エリア特定手段131は、第一車両配置情報から、一の車両(ここでは、自車両とも言う)の位置を示す位置情報(x3,y3)を取得する。また、他車両存在エリア特定手段131は、第二車両配置情報から、他車両の位置を示す位置情報(x2,y2)を取得する。
【0106】
そして、他車両存在エリア特定手段131は、自車両と他車両の位置の差「X=x4−x3」「Y=y4−y3」を算出する。
【0107】
次に、他車両存在エリア特定手段131は、算出したX,およびYの符号から、図9(a)に従って、他車両の存在エリアの領域の角度(degree)を判断する。ここで、他車両存在エリア特定手段131は、他車両(車両3)の領域を(4)「270〜360度」であると判断した、とする。
【0108】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する進行方向情報(X4)が示す進行方向と他車両から受信した第二車両配置情報(パケット)中に含まれている進行方向情報(X3)が示す進行方向を比較して、±15度範囲であるので、同一方向と、判断する。
【0109】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する位置情報(x4,y4)と、他車両から受信した第二車両配置情報中に含まれている位置情報(x3,y3)とを比較する。そして、左斜め前方、左方向、左斜め後方のいずれかのうち、他車両存在方向特定手段132は、他車両(車両4)の領域を「左斜め後方」と判断した、とする。この判断方法は、上述した判断方法の数値(角度)を変更すれば可能であるので、詳細な説明を省略する(図18参照)。そして、他車両存在方向特定手段132は、両車両の進行方向が同一方向であり、かつ、他車両の存在エリアが、第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアであるので、当該他車両が前記一の車両に対して左斜め後方の車両であることを示す左側並走車両(特に、後方)であることを示す車両配置関係情報を取得する。なお、他車両の存在エリアが左斜め後方エリアであることを取得する処理は、他車両存在エリア特定手段131が行っても良い。
【0110】
次に、車両配置関係情報出力部14は、取得した車両配置関係情報「左側並走車両(特に、後方)」を出力する。ここでの出力は、例えば、自車両の運転者への注意喚起(左側の後方に並走する他車両が存在する旨の表示、左側の後方に並走する他車両が存在することを知らせる音(ブザー音など)の出力など)を行っても良い。
【0111】
次に、チャネル割当手段151は、例えば、車線2に割り当てられた周波数f3を取得する。そして、周波数f3は、他車両の送信周波数f1とは異なるので、送信手段152は、周波数チャネルf3を用いて、第一車両配置情報を他車両に送信する。
【0112】
次に、自車両の運転者は、左にウィンカーを出して、左折しようとする、とする。すると、「左斜め後方」の存在する車両ID「ID3」の車両を検知されているので、車両配置関係情報出力部14は、自車両の運転者への注意喚起(左斜め後方に他車両が存在する旨の表示、左斜め後方に他車両が存在することを知らせる音(ブザー音など)の出力など)を行う。
【0113】
以上の処理により、二輪車等の左折巻き込みの防止を図ることができる。また、本具体例において、右方向エリアを3エリア「右斜め前方エリア」、「右方向エリア」、「右斜め後方エリア」にさらに詳細に分割し、左方向エリアを3エリア「左斜め前方エリア」、「左方向エリア」、「左斜め後方エリア」に分割した。かかる処理により、より細かい制御が可能となった。
【0114】
以上、本実施の形態によれば、一の車両に対応する他車両の位置を、適切に取得できる。その結果、右折事故、出会い頭事故、歩行者事故、正面衝突事故、追突事故、左折事故、車線変更に伴う衝突事故などの防止を適切に図ることができる。
【0115】
なお、本実施の形態によれば、無線通信装置は、通常、一の車両に設置されているが、いわゆるサーバ装置に設置されていても良い。かかる場合、1以上の車両から送信された車両配置情報を収集し、各車両に送信するサーバ装置が存在する。
【0116】
また、本実施の形態において説明した他車両の位置を取得した結果の情報である車両配置関係情報の利用方法は問わない。つまり、他車両の位置を単に、一の車両のディスプレイに出力するだけでも良いし、注意喚起のために音(ブザー音など)を出力しても良いし、各種の事故防止のために自動車を自動制御するなどしても良い。かかる場合の車両配置関係情報の取得方法は以下のような方法である。つまり、第一車両配置情報取得部、第二車両配置情報受信部、および車両配置関係情報取得部により実現される車両配置関係情報の取得方法であって、前記第一車両配置情報取得部により、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得ステップと、前記第二車両配置情報受信部により、前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信ステップと、前記車両配置関係情報取得部により、前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得ステップとを具備する車両配置関係情報の取得方法である。
【0117】
上記方法において、車両配置関係情報取得ステップは、前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定サブステップを具備することは好適である。
【0118】
上記方法において、車両配置関係情報取得ステップは、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定サブステップをさらに具備することは好適である。
【0119】
上記方法において、前記他車両存在方向特定サブステップは、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して前方の先行する車両である前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して後方の後続する車両である後方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して右方向のエリアである右方向エリアである場合に、当該他車両が前記一の車両に対して右側を並走する車両である右側並走車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して左方向のエリアである左方向エリアである場合に、当該他車両が前記一の車両に対して左側を並走する車両である左側並走車両であることを示す車両配置関係情報を取得することは好適である。
【0120】
上記方法において、他車両存在方向特定サブステップは、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか、逆方向であるか、いずれでもないかを判断し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して接近している対向車両である接近対向車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して通過した対向車両である通過対向車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無い場合に、当該他車両が前記一の車両に対して隣接対応車両であることを示す車両配置関係情報を取得することは好適である。
【0121】
上記方法において、他車両存在方向特定サブステップは、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアである右斜め前方エリアである場合に、当該他車両が前記一の車両に対して右斜め前方の先行する車両である右斜め前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め後方のエリアである右斜め後方エリアである場合に、当該他車両が前記一の車両に対して右斜め後方の後続する車両である右斜め後方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め前方のエリアである左斜め前方エリアであるに、当該他車両が前記一の車両に対して左斜め前方の先行する車両である左斜め前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアである左斜め後方エリアである場合に、当該他車両が前記一の車両に対して左斜め後方の後続する車両である左斜め後方車両であることを示す車両配置関係情報を取得することは好適である。
【0122】
さらに、本実施の形態における処理は、ソフトウェアで実現しても良い。そして、このソフトウェアをソフトウェアダウンロード等により配布しても良い。また、このソフトウェアを光学ディスクなどの記録媒体に記録して流布しても良い。なお、このことは、本明細書における他の実施の形態においても該当する。なお、本実施の形態における情報処理装置を実現するソフトウェアは、以下のようなプログラムである。つまり、このプログラムは、コンピュータを、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得部と、前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信部と、前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得部と、前記車両配置関係情報を出力する車両配置関係情報出力部として機能させるためのプログラム、である。
【0123】
上記プログラムにおいて、前記車両配置関係情報取得部は、前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定手段を具備するものとして、コンピュータを機能させるためのプログラム、であることは好適である。
【0124】
また、上記プログラムにおいて、前記車両配置関係情報取得部は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定手段をさらに具備するものとして、コンピュータを機能させるためのプログラム、であることは好適である。
【0125】
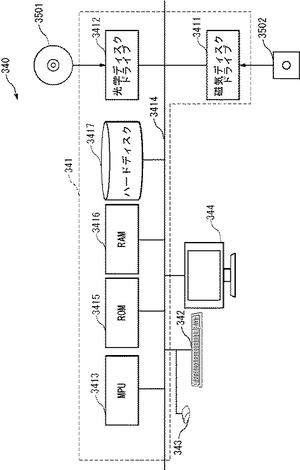
また、図19は、本明細書で述べたプログラムを実行して、上述した実施の形態の無線通信装置等を実現するコンピュータの外観を示す。上述の実施の形態は、コンピュータハードウェア及びその上で実行されるコンピュータプログラムで実現され得る。図19は、このコンピュータシステム340の概観図であり、図20は、コンピュータシステム340のブロック図である。
【0126】
図19において、コンピュータシステム340は、磁気ディスクドライブ、光学ディスクドライブを含むコンピュータ341と、キーボード342と、マウス343と、モニタ344とを含む。
【0127】
図20において、コンピュータ341は、磁気ディスクドライブ3411、光学ディスクドライブ3412に加えて、MPU3413と、光学ディスクドライブ3412及び磁気ディスクドライブ3411に接続されたバス3414と、ブートアッププログラム等のプログラムを記憶するためのROM3415とに接続され、アプリケーションプログラムの命令を一時的に記憶するとともに一時記憶空間を提供するためのRAM3416と、アプリケーションプログラム、システムプログラム、及びデータを記憶するためのハードディスク3417とを含む。ここでは、図示しないが、コンピュータ341は、さらに、LANへの接続を提供するネットワークカードを含んでも良い。
【0128】
コンピュータシステム340に、上述した実施の形態の無線通信装置等の機能を実行させるプログラムは、光学ディスク3501、または磁気ディスク3502に記憶されて、光学ディスクドライブ3412または磁気ディスクドライブ3411に挿入され、さらにハードディスク3417に転送されても良い。これに代えて、プログラムは、図示しないネットワークを介してコンピュータ341に送信され、ハードディスク3417に記憶されても良い。プログラムは実行の際にRAM3416にロードされる。プログラムは、光学ディスク3501、磁気ディスク3502またはネットワークから直接、ロードされても良い。
【0129】
プログラムは、コンピュータ341に、上述した実施の形態の無線通信装置等の機能を実行させるオペレーティングシステム(OS)、またはサードパーティープログラム等は、必ずしも含まなくても良い。プログラムは、制御された態様で適切な機能(モジュール)を呼び出し、所望の結果が得られるようにする命令の部分のみを含んでいれば良い。コンピュータシステム340がどのように動作するかは周知であり、詳細な説明は省略する。
【0130】
なお、上記プログラムにおいて、情報を送信する送信ステップや、情報を受信する受信ステップなどでは、ハードウェアによって行われる処理、例えば、送信ステップにおけるモデムやインターフェースカードなどで行われる処理(ハードウェアでしか行われない処理)は含まれない。
【0131】
また、上記プログラムを実行するコンピュータは、単数であってもよく、複数であってもよい。すなわち、集中処理を行ってもよく、あるいは分散処理を行ってもよい。
【0132】
また、上記各実施の形態において、一の装置に存在する2以上の通信手段(第二車両配置情報受信部、第一車両配置情報送信部など)は、物理的に一の媒体で実現されても良いことは言うまでもない。
【0133】
また、上記各実施の形態において、各処理(各機能)は、単一の装置(システム)によって集中処理されることによって実現されてもよく、あるいは、複数の装置によって分散処理されることによって実現されてもよい。
【0134】
本発明は、以上の実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
【産業上の利用可能性】
【0135】
以上のように、本発明にかかる無線通信装置は、一の車両に対応する他車両の位置を、適切に取得できる、という効果を有し、無線通信装置等として有用である。
【図面の簡単な説明】
【0136】
【図1】実施の形態1における無線ネットワークの概略図
【図2】同無線通信装置のブロック図
【図3】同周波数チャネルの基本割当について示した図
【図4】同周波数チャネルの割当処理について説明する図
【図5】同周波数チャネルの割当処理について説明する図
【図6】同周波数チャネルの割当処理について説明する図
【図7】同無線通信装置の動作について説明するフローチャート
【図8】同位置関係特定処理の動作について説明するフローチャート
【図9】同他車両の存在エリアを特定する処理について説明する図
【図10】同他車両の存在エリアを特定する処理について説明する図
【図11】同他車両の存在エリアを特定する処理について説明する図
【図12】同車両配置関係情報取得処理の動作について説明するフローチャート
【図13】同他車両の存在方向を特定する処理について説明する図
【図14】同出会い頭衝突防止の車両配置例を示す図
【図15】同右折事故の車両配置例を示す図
【図16】同車線変更を行う場合の例について説明する図
【図17】同周辺車両情報管理表を示す図
【図18】同二輪車の左折巻き込み防止のアプリケーションの例を示す図
【図19】同コンピュータシステムの概観図
【図20】同コンピュータシステムのブロック図
【符号の説明】
【0137】
1 無線通信装置
11 第一車両配置情報取得部
12 第二車両配置情報受信部
13 車両配置関係情報取得部
14 車両配置関係情報出力部
15 第一車両配置情報送信部
130 周辺車両情報格納手段
131 他車両存在エリア特定手段
132 他車両存在方向特定手段
151 チャネル割当手段
152 送信手段
【技術分野】
【0001】
本発明は、主として、自車両に対する他車両の相対的な位置情報を含む配置関係情報を取得する無線通信装置等に関するものである。
【背景技術】
【0002】
国土交通省が推進しているASV(先進安全自動車)では、車車間通信を予防安全向上に資する運転支援システムの実用化に取り組まれている。
【0003】
ASVで行われている検討では、事故数の多い事故4類型に、社会的要求として低減が期待される事故3類型を加えて合計7つの事故類型をピックアップしている。7つの事故類型とは、右折事故、出会い頭事故、歩行者事故、正面衝突事故、追突事故、左折事故、車線変更に伴う衝突事故である。ASVでは、かかる7つの事故類型で分類される事故の回避を中心として、安全な交通社会の実現を目指す取り組みが行われている。
【0004】
また、従来、マルチキャリアおよびマルチコードからなるチャネルを用いて、無線通信を行う無線通信装置があった(例えば、非特許文献1参照)。本無線通信装置は、レスポンス性劣化要因を大幅に削減するMM−SA(Multi−Carrier&Multi−Code Spread ALOHA)方式を採用する。MM−SA方式は、4個の周波数チャネルおよび15個の拡散コードによって掲載されるチャネルから、チャネル制御によって、干渉量の少ないチャネルを確立し、その確定したチャネルを用いて情報を送受信する方式である。
【非特許文献1】酒井敏宏、大山卓、鈴木龍太郎、門脇直人、小花貞夫、"高レスポンスアドホック無線通信方式:MM-SA方式の試作と性能評価"、信学技報, vol. 107, no. 113, RCS2007-13, pp. 13-18, 2007年6月
【発明の開示】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の無線通信装置においては、一の車両に対応する他車両の位置を、適切に取得できなかった。
【0006】
特に、従来の無線通信装置においては、周辺車両から集められた情報である周辺車両情報を用いて、自律的に車両の方向位置を特定することがきでなかった。そのため、例えば、左折時に、横方向から接近してくる二輪車を巻き込むことを防止する支援を適切にできなかった。また、例えば、複数車線道路で、車線変更する際には、両側の車線で走行している後続車両にも注意を促すことが、適切にできなかった。
【課題を解決するための手段】
【0007】
本第一の発明の無線通信装置は、車車間通信装置において利用される無線通信装置であって、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得部と、前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信部と、前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得部と、前記車両配置関係情報を出力する車両配置関係情報出力部とを具備する無線通信装置である。
【0008】
かかる構成により、一の車両に対応する他車両の相対的な位置の情報を、適切に取得できる。
【0009】
また、本第二の発明の無線通信装置は、第一の発明に対して、前記車両配置関係情報取得部は、前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定手段を具備する無線通信装置である。
【0010】
かかる構成により、一の車両に対応する他車両の存在エリアを、適切に取得できる。
【0011】
また、本第三の発明の無線通信装置は、第二の発明に対して、前記車両配置関係情報取得部は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定手段をさらに具備する無線通信装置である。
【0012】
かかる構成により、一の車両に対応する他車両の存在エリア、および他車両の方向を、適切に取得できる。
【0013】
また、本第四の発明の無線通信装置は、第三の発明に対して、前記他車両存在方向特定手段は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して前方の先行する車両である前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して後方の後続する車両である後方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して右方向のエリアである右方向エリアである場合に、当該他車両が前記一の車両に対して右側を並走する車両である右側並走車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して左方向のエリアである左方向エリアである場合に、当該他車両が前記一の車両に対して左側を並走する車両である左側並走車両であることを示す車両配置関係情報を取得する無線通信装置である。
【0014】
かかる構成により、他車両の存在エリア、および他車両の進行方向を用いて、一の車両に対応する他車両の配置関係を、適切に取得できる。
【0015】
また、本第五の発明の無線通信装置は、第四の発明に対して、前記他車両存在方向特定手段は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか、逆方向であるか、いずれでもないかを判断し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して接近している対向車両である接近対向車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して通過した対向車両である通過対向車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無い場合に、当該他車両が前記一の車両に対して隣接対応車両であることを示す車両配置関係情報を取得する無線通信装置である。
【0016】
かかる構成により、他車両の存在エリア、および他車両の進行方向を用いて、一の車両に対応する他車両の配置関係を、適切に取得できる。
【0017】
また、本第六の発明の無線通信装置は、第四、第五いずれかの発明に対して、前記他車両存在方向特定手段は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアである右斜め前方エリアである場合に、当該他車両が前記一の車両に対して右斜め前方の先行する車両である右斜め前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め後方のエリアである右斜め後方エリアである場合に、当該他車両が前記一の車両に対して右斜め後方の後続する車両である右斜め後方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め前方のエリアである左斜め前方エリアであるに、当該他車両が前記一の車両に対して左斜め前方の先行する車両である左斜め前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアである左斜め後方エリアである場合に、当該他車両が前記一の車両に対して左斜め後方の後続する車両である左斜め後方車両であることを示す車両配置関係情報を取得する無線通信装置である。
【0018】
かかる構成により、他車両の存在エリア、および他車両の進行方向を用いて、一の車両に対応する他車両の配置関係を、より適切に取得できる。
【0019】
また、本第七の発明の無線通信装置は、第一から第六いずれかの発明に対して、前記車両配置関係情報出力部が出力した前記車両配置関係情報を受け付け、当該車両配置関係情報を用いて、マルチキャリアおよびマルチコードからなるチャネルにより、前記第一車両配置情報を送信する第一車両配置情報送信部をさらに具備する無線通信装置である。
【0020】
かかる構成により、マルチキャリアおよびマルチコードからなるチャネルを用いて、一の車両の車両配置情報を、他の車両に送信できる。
【発明の効果】
【0021】
本発明による無線通信装置によれば、一の車両に対応する他車両の位置を、適切に取得できる。
【発明を実施するための最良の形態】
【0022】
以下、無線通信装置等の実施形態について図面を参照して説明する。なお、実施の形態において同じ符号を付した構成要素は同様の動作を行うので、再度の説明を省略する場合がある。
【0023】
(実施の形態1)
【0024】
本実施の形態において、車車間通信において、他車両の相対的な位置情報を含む車両配置関係情報を取得し、当該車両配置関係情報を利用する無線通信装置等について説明する。本無線通信装置において、一の車両に対応する他車両の存在エリアを適切に特定したり、一の車両に対応する他車両の配置関係(先行車、後続車、対向車、並走車など)を特定したりできる。なお、車両とは、自動車、飛行機、電車、バス、自転車、二輪車などの移動体である。また、本実施の形態において、無線通信装置は、移動体(車両、人、生物など)が保持している(設置されている)状態であれば良い。
【0025】
図1は、本実施の形態における無線ネットワークの概略図である。無線ネットワークは、無線通信装置1〜10を備える。無線通信装置1〜10は、それぞれ、車両1〜車両10に搭載されている。
【0026】
図2は、本実施の形態における無線通信装置1のブロック図である。無線通信装置1は、第一車両配置情報取得部11、第二車両配置情報受信部12、車両配置関係情報取得部13、車両配置関係情報出力部14、第一車両配置情報送信部15を具備する。
【0027】
車両配置関係情報取得部13は、周辺車両情報格納手段130、他車両存在エリア特定手段131、他車両存在方向特定手段132を具備する。
【0028】
第一車両配置情報送信部15は、チャネル割当手段151、送信手段152を具備する。
【0029】
第一車両配置情報取得部11は、第一車両配置情報を取得する。第一車両配置情報とは、一の車両の車両配置情報である。車両配置情報は、車両の走行に関する情報である。車両配置情報は、車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む。つまり、第一車両配置情報は、一の車両の位置情報と、一の車両の進行方向情報とを含む。また、第一車両配置情報は、通常、一の車両を識別する情報である車両IDを含む。第一車両配置情報取得部11は、例えば、GPS(Global Positioning System)受信装置で実現され得る。また、第一車両配置情報取得部11は、例えば、ビーコンや、その他の手段を用いて、第一車両配置情報を取得しても良い。また、ここでの取得とは、他の図示しない装置(例えば、種々の車両の車両配置情報を収集するサーバ装置など)からの受信でも良い。
【0030】
第二車両配置情報受信部12は、一の車両とは異なる他車両に設置された他の無線通信装置(適宜、「他車両」とも言う。)から、他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する。なお、第二車両配置情報は、通常、他車両を識別する情報である車両IDを含む。第二車両配置情報受信部12は、通常、定期的に第二車両配置情報を受信する。ただし、定期的とは、正確に、同時間間隔でなければならない趣旨ではない。また、第二車両配置情報受信部12が第二車両配置情報を受信するタイミングは、定期的で無くても良い。他の無線通信装置からの受信は、直接的な受信でも、他の装置を経由した間接的な受信でも良い。また、第二車両配置情報受信部12は、通常、パケット化され、変調された第二車両配置情報を受信する。また、第二車両配置情報は、通常、受信後に復調される。また、第二車両配置情報受信部12は、通常、すべての周波数チャネルの情報(パケット)を受信する。第二車両配置情報受信部12は、通常、無線通信手段で実現されるが、放送を受信する手段で実現されても良い。第二車両配置情報受信部12は、例えば、MM−SA方式により、第二車両配置情報を受信する。
【0031】
車両配置関係情報取得部13は、第一車両配置情報と第二車両配置情報とを用いて、車両配置関係情報を取得する。また、車両配置関係情報取得部13は、第一車両配置情報と第二車両配置情報とを、通常、周辺車両情報格納手段130に、少なくとも一時蓄積する。車両配置関係情報は、他車両の一の車両に対する相対的な位置関係を含む情報である。また、車両配置関係情報は、他車両の一の車両に対する相対的な走行に関する情報である。車両配置関係情報とは、例えば、一の車両に対して、他車両が先行車であることを示す情報(例えば、「a」)、他車両が後続車であることを示す情報(例えば、「b」)、他車両が対向車であることを示す情報(例えば、「c」)、他車両が並走車であることを示す情報(例えば、「d」)などである。また、車両配置関係情報は、例えば、一の車両に対して、右側を並走する車両である右側並走車両であることを示す情報、一の車両に対して左側を並走する車両である左側並走車両であることを示す情報、一の車両に対して接近している対向車両である接近対向車両であることを示す情報、または、一の車両に対して通過した対向車両である通過対向車両であることを示す情報などでも良い。また、車両配置関係情報とは、例えば、一の車両に対する他車両の存在エリアを識別するエリア識別子を有する。存在エリアを識別するエリア識別子は、例えば、他車両が一の車両に対して前方に存在することを示す前方識別子(例えば、「1」)、他車両が一の車両に対して後方に存在することを示す後方識別子(例えば、「2」)、他車両が一の車両に対して右方向に存在することを示す右方向識別子(例えば、「3」)、他車両が一の車両に対して左方向に存在することを示す左方向識別子(例えば、「4」)である。また、存在エリアを識別するエリア識別子は、以下の8つ、存在することは好適である。8つのエリア識別子は、他車両が一の車両に対して前方に存在することを示す前方識別子(例えば、「1」)、他車両が一の車両に対して後方に存在することを示す後方識別子(例えば、「2」)、他車両が一の車両に対して右方向に存在することを示す右方向識別子(例えば、「3」)、他車両が一の車両に対して右斜め前方に存在することを示す右斜め前方識別子(例えば、「4」)、他車両が一の車両に対して右斜め後方に存在することを示す右斜め後方識別子(例えば、「5」)、他車両が一の車両に対して左方向に存在することを示す左方向識別子(例えば、「6」)他車両が一の車両に対して左斜め前方に存在することを示す左斜め前方識別子(例えば、「7」)、他車両が一の車両に対して左斜め後方に存在することを示す左斜め後方識別子(例えば、「8」)である。
【0032】
車両配置関係情報取得部13は、通常、MPUやメモリ等から実現され得る。車両配置関係情報取得部13の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0033】
周辺車両情報格納手段130は、一の車両に関する情報である自車両情報、および他車両(1以上、存在しても良い)に関する情報である他車両情報(適宜、「周辺車両情報」とも言う。)を格納し得る。自車両情報は、第一車両配置情報取得部11が取得した第一車両配置情報を含む。また、他車両情報は、第二車両配置情報受信部12が受信した第二車両配置情報を含む。周辺車両情報格納手段130は、不揮発性の記録媒体が好適であるが、揮発性の記録媒体でも実現可能である。
【0034】
他車両存在エリア特定手段131は、第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、第一車両配置情報が有する位置情報と第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する。なお、他車両存在エリア特定手段131が分割するエリアは、4であることが好適である。また、他車両存在エリア特定手段131が分割するエリアは、8であることがさらに好適である。また、エリアは、一の車両の位置情報が示す位置(原点)を中心とした、扇形に外に広がる領域である。また、分割するエリアが2の場合は、通常、「前方」「後方」のエリアである。分割するエリアが4の場合は、通常、「前方」「後方」「右方向」「左方向」である。分割するエリアが8の場合は、通常、「前方」「後方」「右方向」「右斜め前方」「右斜め後方」「左方向」「左斜め前方」「左斜め後方」である。他車両存在エリア特定手段131は、通常、MPUやメモリ等から実現され得る。他車両存在エリア特定手段131の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0035】
他車両存在方向特定手段132は、第一車両配置情報が有する進行方向情報、第二車両配置情報が有する進行方向情報、および他車両存在エリア特定手段131が取得したエリア識別子を用いて、一の車両と他車両との車両配置関係を示す車両配置関係情報を取得する。車両配置関係情報とは、例えば、他車両が先行車(例えば、「1」)であることを示す情報、他車両が後続車(例えば、「2」)であることを示す情報、他車両が対向車(例えば、「3」)であることを示す情報、他車両が並走車(例えば、「4」)であることを示す情報などを示す情報である。
【0036】
また、他車両存在方向特定手段132は、第一車両配置情報が有する進行方向情報、第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断する。また、他車両存在方向特定手段132は、第一車両配置情報が有する進行方向情報、第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか、逆方向であるか、いずれでもないかを判断することは、さらに好適である。なお、同一方向とは、例えば、一の車両の進行方向情報が示すベクトルの向きに対して、他車両の進行方向情報が示すベクトルの向きが「+−15度」の範囲であることを言う。また、逆方向とは、例えば、一の車両の進行方向情報が示すベクトルと180度異なるベクトルの向きに対して、他車両の進行方向情報が示すベクトルの向きが「+−15度」の範囲であることを言う。
【0037】
そして、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが前方エリアである場合に、当該他車両が一の車両に対して前方の先行する車両であることを示す前方車両であることを示す車両配置関係情報を取得する。前方エリアとは、例えば、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが後方エリアである場合に、当該他車両が前記一の車両に対して後方の後続する車両であることを示す後方車両であることを示す車両配置関係情報を取得する。なお、後方エリアとは、例えば、前方エリアに対して180度分ずらしたエリア群である。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、前方エリアでも無く、後方エリアでも無く、右方向エリアである場合に、当該他車両が一の車両に対して右側を並走する車両であることを示す右側並走車両であることを示す車両配置関係情報を取得する。右方向エリアは、他車両の位置が第一車両配置情報の有する位置情報が示す位置に対して右方向のエリアである。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131によって特定された存在エリアが左方向エリアである場合に、当該他車両が前記一の車両に対して左側を並走する車両であることを示す左側並走車両であることを示す車両配置関係情報を取得する。左方向エリアとは、前方エリアでも無く、前記後方エリアでも無く、第一車両配置情報が有する位置情報が示す位置に対して左方向のエリアである。
【0038】
また、他車両存在方向特定手段132は、逆方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して接近している対向車両である接近対向車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、逆方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して通過した対向車両である通過対向車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、逆方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、前方エリアでも無く、後方エリアでも無い場合に、当該他車両が一の車両に対して隣接対応車両であることを示す車両配置関係情報を取得する。
【0039】
また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアである右斜め前方エリアである場合に、当該他車両が前記一の車両に対して右斜め前方の先行する車両である右斜め前方車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、第一車両配置情報が有する位置情報が示す位置の右斜め後方のエリアである右斜め後方エリアである場合に、当該他車両が前記一の車両に対して右斜め後方の後続する車両である右斜め後方車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、第一車両配置情報が有する位置情報が示す位置の左斜め前方のエリアである左斜め前方エリアであるに、当該他車両が前記一の車両に対して左斜め前方の先行する車両である左斜め前方車両であることを示す車両配置関係情報を取得する。また、他車両存在方向特定手段132は、同一方向であり、かつ、他車両存在エリア特定手段131、または自身(他車両存在方向特定手段132)によって特定された存在エリアが、第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアである左斜め後方エリアである場合に、当該他車両が前記一の車両に対して左斜め後方の後続する車両である左斜め後方車両であることを示す車両配置関係情報を取得する。
【0040】
他車両存在方向特定手段132は、通常、MPUやメモリ等から実現され得る。他車両存在方向特定手段132の処理手順は、通常、ソフトウェアで実現され、当該ソフトウェアはROM等の記録媒体に記録されている。但し、ハードウェア(専用回路)で実現しても良い。
【0041】
車両配置関係情報出力部14は、車両配置関係情報を出力する。ここで、出力とは、ディスプレイへの表示、プロジェクターを用いた投影、プリンタへの印字、音出力、外部の装置への送信、記録媒体への蓄積、他の処理装置や他のプログラム等への処理結果の引渡し等を含む概念である。さらに具体的には、出力とは、一の車両のディスプレイへの表示(例えば、先行車、後続車、対向車、並走車などの図的な表示)、後続車、対向車、並走車等の存在について、注意喚起するための音出力なども含む概念である。また、出力とは、車両の制御プログラムへの車両配置関係情報の引き渡しでも良い。車両配置関係情報出力部14は、第一車両配置情報送信部15に車両配置関係情報を引き渡すだけの動作の場合もあり得る。車両配置関係情報出力部14は、ディスプレイやスピーカー等の出力デバイスを含むと考えても含まないと考えても良い。車両配置関係情報出力部14は、例えば、出力デバイスのドライバーソフトまたは、出力デバイスのドライバーソフトと出力デバイス等で実現され得る。
【0042】
第一車両配置情報送信部15は、車両配置関係情報出力部14が出力した車両配置関係情報を受け付け、当該車両配置関係情報を用いて、第一車両配置情報を送信する。第一車両配置情報送信部15は、通常、第一車両配置情報をパケット化し、かつ、変調して送信する。第一車両配置情報送信部15は、第一車両配置情報を、他車両に送信する。第一車両配置情報送信部15は、例えば、マルチキャリアおよびマルチコードからなるチャネルを用いて、第一車両配置情報を有するパケットの送信を行う。第一車両配置情報送信部15は、通常、無線通信手段で実現されるが、放送手段で実現されても良い。
【0043】
チャネル割当手段151は、車両配置関係情報取得部13が取得した車両配置関係情報を用いて、チャネル割り当てを行う。チャネル割当手段151は、例えば、以下のようにチャネル割り当てを行う。図3は、周波数チャネルの基本割当について示した図である。基本割当状態(図3)では、真北を基準に±45度範囲の割り当て周波数は「f4」、真東を基準に±45度範囲の割り当て周波数は「f1」、真南を基準に±45度範囲の割り当て周波数は「f2」、真南を基準に±45度範囲の割り当て周波数は「f3」と決められている、とする。そして、基本割当ルールとして、f2はf4の対向車線用、f3はf1の対向車線用とする。
【0044】
そして、以下に、東西南北に整備されていない道路において、チャネル割当手段151が周波数チャネルを割り当てるアルゴリズムについて説明する。図4に示す様に、道路が真北を基準に角度θの傾きがあった場合、チャネル割当手段151は、例えば、4つの周波数に分けて、周波数チャネルを選択する。しかしながら、交差道路は必ずしも、90度で交差している分けではなく、鋭角で交差する道路も存在する。その場合、基本割当状態では、走行している道路は異なるが、同一の周波数を割当てしまうことになる。これを避ける方法を、図5および図6を用いて説明する。ここで、真北を中心に±45度範囲に2つの車両が同一の周波数f4を使用している場合を例に示す。チャネル割当手段151は、自律的に制御する際の優先順位を「(1)>(2)>(3)」とする、とする。ここで、(1)、(2)、(3)は、図5に示す様に、真北を0度とすると、(1)(0度〜15度)範囲と(345度〜360度(0度))範囲、(2)(315度〜345度)範囲、(3)(15度〜45度)範囲である。
【0045】
図5は、車両1の進行方向は(2)の範囲、車両2の進行方向は(1)の場合の例を示したものである。この場合、(1)に存在する車両2の優先順位が高いので、チャネル割当手段151は、車両1の使用チャネルをf4から、f3へ変更する。
【0046】
図6は、車両1の進行方向は(2)、車両2の進行方向は(3)の場合の例を示している。この場合、優先順位条件から、車両2の方の優先順位が低いことから、チャネル割当手段151は、車両2の使用チャネルをf4からf1へ変更する。なお、かかるチャネル割当手段151の周波数の決定方法、および周波数は、一例であり、これらに制限されるものではないことは言うまでもない。
【0047】
送信手段152は、チャネル割当手段151が決定した周波数で、第一車両配置情報(パケット)を他車両に送信する。送信手段152は、例えば、MM−SA方式により、第一車両配置情報を受信する。送信手段152は、通常、無線通信手段で実現されるが、放送手段で実現されても良い。
【0048】
次に、無線通信装置1の動作について図7のフローチャートを用いて説明する。
【0049】
(ステップS701)第二車両配置情報受信部12は、他車両から、第二車両配置情報を受信したか否かを判断する。第二車両配置情報を受信すればステップS702に行き、第二車両配置情報を受信しなければステップS708に行く。
【0050】
(ステップS702)車両配置関係情報取得部13は、ステップS701で受信された第二車両配置情報を用いて、周辺車両情報格納手段130に格納されている第二車両配置情報であり、受信された第二車両配置情報に対応する第二車両配置情報を更新する。
【0051】
(ステップS703)車両配置関係情報取得部13は、周辺車両情報格納手段130に格納されている第一車両配置情報を読み出す。
【0052】
(ステップS704)車両配置関係情報取得部13は、ステップS703で読み出した第一車両配置情報、およびステップS701で受信された第二車両配置情報を用いて、位置関係特定処理を行う。位置関係特定処理とは、一の車両と他車両との位置関係を特定する処理である。位置関係特定処理について、図8のフローチャートを用いて説明する。
【0053】
(ステップS705)車両配置関係情報取得部13は、車両配置関係情報取得処理を行う。車両配置関係情報取得処理について、図12のフローチャートを用いて説明する。
【0054】
(ステップS706)車両配置関係情報取得部13は、ステップS705で取得した車両配置関係情報等を、周辺車両情報格納手段130に蓄積する。
【0055】
(ステップS707)車両配置関係情報出力部14は、ステップS705で取得した車両配置関係情報を出力する。
【0056】
(ステップS708)第一車両配置情報送信部15は、第一車両配置情報を送信するタイミングであるか否かを判断する。第一車両配置情報を送信するタイミングであればステップS709に行き、第一車両配置情報を送信するタイミングでなければステップS701に戻る。第一車両配置情報送信部15は、定期的に第一車両配置情報を送信しても良いし、何らかのイベントをトリガーにして、第一車両配置情報を送信しても良い。何らかのイベントとは、例えば、ユーザがウィンカー(右または左)の上げた(指示した)こと、ブレーキを踏んだこと等の自動車の操作(特に、他車両に影響する可能性のある特定の操作)であることは好適である。
【0057】
(ステップS709)第一車両配置情報送信部15は、周辺車両情報格納手段130から、第一車両配置情報を取得する。
【0058】
(ステップS710)第一車両配置情報送信部15は、第一車両配置情報を含む自車両情報を構成し、蓄積する。
【0059】
(ステップS711)車両配置関係情報出力部14は、車両配置関係情報、第一車両配置情報等を、チャネル割当手段151に渡す。そして、チャネル割当手段151は、車両配置関係情報等を用いて、チャネル割当処理を行う。チャネル割当処理の例については、既に説明したので、その詳細な説明は省略する。
【0060】
(ステップS712)送信手段152は、ステップS714で割り当てられた周波数チャネルを用いて、第一車両配置情報を他車両に送信する。ステップS701に戻る。
【0061】
なお、図7のフローチャートにおいて、電源オフや処理終了の割り込みにより処理は終了する。
【0062】
次に、ステップS704の位置関係特定処理について、図8のフローチャートを用いて説明する。
【0063】
まず、他車両存在エリア特定手段131は、第一車両配置情報から、一の車両(ここでは、自車両とも言う)の位置を示す位置情報(x1,y1)を取得する。また、他車両存在エリア特定手段131は、第二車両配置情報から、他車両の位置を示す位置情報(x2,y2)を取得する。そして、他車両存在エリア特定手段131は、自車両と他車両の位置の差を算出する。自車両と他車両の位置の差は、「X=x2−x1」および「Y=y2−y1」により、算出できる(ステップS801)。なお、他車両存在エリア特定手段131は、上記算出式に関する情報をあらかじめ保持している、とする。
【0064】
次に、他車両存在エリア特定手段131は、ステップS801で算出したX,およびYの符号から、図9(a)に従って、他車両の存在エリアの領域の角度(degree)を判断する。そして、角度に応じて、他車両の存在エリアが、図9(b)の(1)から(4)のいずれの領域であるかを判断する。つまり、例えば、まず、他車両存在エリア特定手段131は、「X・Y(XとYの積)」が正であるか、負であるかを判断する(ステップS802)。そして、正であれば(他車両の領域が(1)または(3)であれば)、ステップS803に行き、負であれば(他車両の領域が(2)または(4)であれば)、ステップS814に行く。なお、角度について、原点(自車両の位置)から北方向(上方向)が0度である、とする。
【0065】
そして、次に、他車両存在エリア特定手段131は、「X>=0かつY>=0」であれば他車両の領域が(1)、「X<0かつY<0」であれば他車両の領域が(3)であると判断する(ステップS803,S804,S805)。また、他車両存在エリア特定手段131は、「X>=0かつY<0」であれば他車両の領域が(2)、「X<0かつY>=0」であれば他車両の領域が(4)であると判断する(ステップS814,S815,S816)。なお、領域(1)は数値「0」、領域(2)は数値「1」、領域(3)は数値「2」、領域(4)は数値「3」に対応する。そして、他車両存在エリア特定手段131は、図8のステップS804、S805、S815、S816において、変数A1に、領域を識別する数値を代入している。ここまでで、他車両存在エリア特定手段131は、他車両が、90度単位のどのエリアに存在するかを絞り込んだことになる。なお、他車両存在エリア特定手段131が、ここまでで処理を終了した場合、他車両の存在エリアを4つのうちのいずれかであるかを決定できることとなる。
【0066】
以下、さらに、他車両存在エリア特定手段131が、他車両の存在エリアを24通りのうちのいずれであるかを決定するための処理の例について説明する。
【0067】
他車両存在エリア特定手段131は、90度(上記の(1)から(4)のいずれかのエリア)を15度単位で区切り、さらに6エリアに分割して、他車両の存在エリアを特定する。今、他車両が0度から90度の範囲に存在する場合について、述べる(図8参照)。図10に、そのアルゴリズム(考え方)を記載している。他車両存在エリア特定手段131は、「Z=Y/X」を算出し(XとYとの比(Z)を算出し)、当該Zの値(図10のValue)に応じて、図10に従って、他車両の存在エリアを取得する。つまり、図8のフローチャートのS806,S817の分岐により、変数A2にエリアを識別するエリア識別子「1」から「6」のいずれかが代入される。そして、他車両存在エリア特定手段131は、変数A1およびA2を用いて、24の領域のいずれかを示すエリア識別子を取得する。ここでは、他車両存在エリア特定手段131は、式「Area=6A1+A2」に、A1,A2を代入することにより、エリア識別子(Area)を取得する。なお、かかる処理により、他車両存在エリア特定手段131は、図11に示すように、他車両の存在エリアを、24エリアのいずれかのエリアに決定する。
【0068】
なお、図8のフローチャートにおいて、存在エリアを15度単位に分割しているが、10度単位でエリア分割しても良い。また、図8のフローチャートにおいて、まず、90度単位にエリア分割し、その90度の中で、15度単位に分割し、最終的に24エリア(360度)中のどのエリアかを判別している。よって、上記の例では、90度分割、15度分割の2段階で判別しているが、エリア数をもっと多くして、1つのエリア角度を小さくしたい場合には、3段階で判別しても良い。よって、この例で示している数値は例示であることは言うまでもない。本例において、例えば、ハードウェア上での演算を考え、第一のステップで90度単位に分割し、第二のステップで15度単位に絞り込んでいるが、ハードウェア実装設計で、ステップ数を増やしても良いし、減らしても良いことは言うまでもない。
【0069】
次に、ステップS705の車両配置関係情報取得処理について、図12のフローチャートを用いて説明する。
【0070】
図8の位置関係特定処理によって、他車両が存在するエリアを特定した後、他車両存在方向特定手段132は、自車両と他車両との進行方向が同一方向か、あるいは逆方向か、あるいはその他かを判別する(ステップS1201)。ここで、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する進行方向情報が示す進行方向と他車両から受信した第二車両配置情報(パケット)中に含まれている進行方向情報が示す進行方向を比較して、±15度範囲であれば、同一方向とする。また、両進行方向が180度±15度範囲であれば、他車両存在方向特定手段132は、逆方向と判別する。他車両存在方向特定手段132は、「同一方向」、「逆方向」以外は、「その他」と判断する。そして、「同一方向」である場合はステップS1202に行き、「逆方向」である場合はステップS1207に行き、「その他」である場合はステップS1211に行く。
【0071】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する位置情報と、他車両から受信した第二車両配置情報中に含まれている位置情報とを比較し、他車両が「前」に存在するか、「右」に存在するか、「左」に存在するか、「後」に存在するかを判断する(ステップS1202)。
【0072】
そして、例えば、他車両存在方向特定手段132は、同一方向を走行している他車両に対しては、自車両の進行方向(15度角度エリア)に左右1エリアずつを含めたエリア(図13の1、2、3のエリア)に他車両が存在していれば、位置関係が「前」であり、当該他車両を前方車両と判定する(ステップS1203)。また、他車両存在方向特定手段132は、自車両の進行方向に180度を加えたエリアに更に左右1エリアずつを含めたエリア(図13の13、14、15)に存在し、進行方向が1、2、3のエリアであれば、位置関係が「後」であり、当該他車両を後方車両と判定する(ステップS1206)。また、他車両存在方向特定手段132は、前方、後方にも属さないエリアは、右方向エリアと左方向エリアに分割し、他車両が同一進行方向かつ右方向であれば右側並走車両(ステップS1204)、他車両が同一進行方向かつ左方向に存在するのであれば左側並走車両と判定する(ステップS1205)。
【0073】
次に、他車両存在方向特定手段132は、逆方向を走行している他車両(対向車両)に対しては、同様に位置関係を取得し、位置関係が「前」であれば、当該他車両を接近対向車両と判定する(ステップS1208)。また、位置関係が「後」であれば、他車両存在方向特定手段132は、当該他車両を通過対向車両と判定する(ステップS1210)。
【0074】
さらに、他車両存在方向特定手段132は、他車両が対向車両であり、位置関係が「前」でも「後」ででも無い場合は、左右判定は行わずに、他車両を隣接対向車両(ステップS1209)と判定する。
【0075】
なお、かかる他車両存在方向特定手段132の判断方法は一例であることは言うまでもない。従って、他車両存在方向特定手段132は、図13において、15度ずつ、エリアを分割したが、例えば、20度ずつでも良い。なお、他車両存在方向特定手段132は、他車両存在エリア特定手段131が取得したエリア識別子を用いて、他車両が「前」に存在するか、「右」に存在するか、「左」に存在するか、「後」に存在するかを判断することは好適である。
【0076】
次に、ステップS715のチャネル割当処理について説明する。チャネル割当手段151は、例えば、以下のように、一の車両に割り当てる周波数チャネルを決定する。一の車両に割り当てる周波数チャネルとは、送信手段152が第一車両配置情報(パケット)を他車両に送信する周波数チャネルである。
【0077】
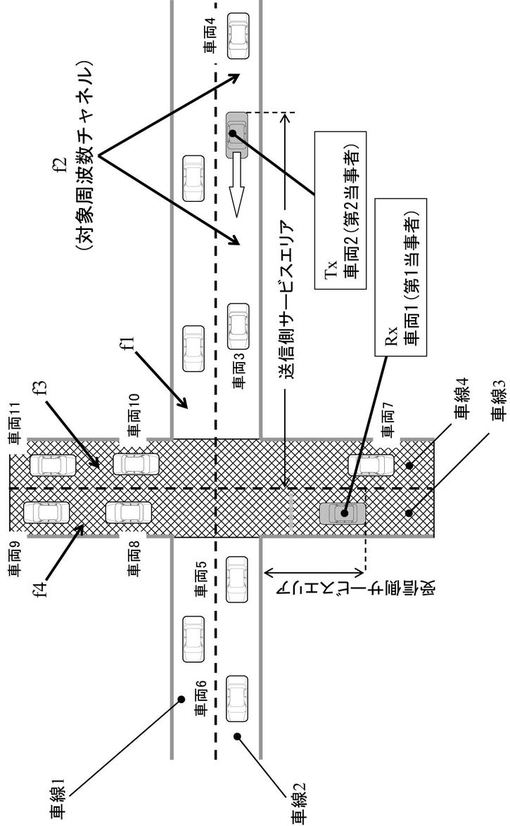
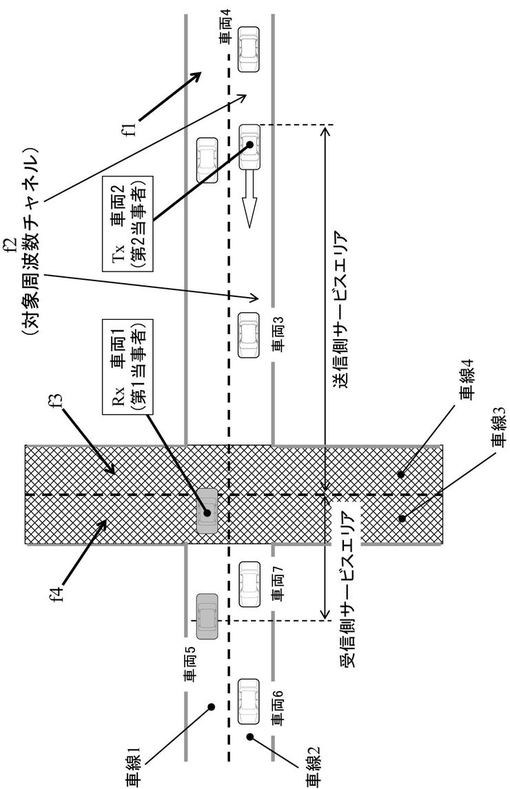
通常、チャネル割当手段151は、一の車両が走行している車線に対して、割り当てられている周波数チャネルを取得する。そして、チャネル割当手段151は、取得した周波数チャネルが、他と重複しないか否かを判断し、重複しなければ、そのまま、取得した周波数チャネルを、利用する周波数チャネルとして決定する。例えば、今、図14に車車間通信アプリケーションの1つである出会い頭衝突防止の車両配置例を示す。車両1が受信車両(一の車両)であり、車両2が所望の送信車両(他車両)である。図14に示す様に、周波数チャネル制御を行なうと、出会い頭事故防止で対象とすべき車線は車線2で周波数チャネルf2となる。そこで、チャネル割当手段151は、受信車両(一の車両)に割当てられた周波数チャネルf4を、利用する周波数チャネルとして決定する。そして、送信手段152は、周波数チャネルf4で、第一車両配置情報を、MM−SA方式で他車両に送信する。なお、図14において、受信車両(一の車両)は、受信側サービスエリアに存在する場合に、送信側サービスエリアに存在する送信車両(他車両)からの第二車両配置情報を受信する。かかることは、他の図面を用いた説明でも同様である。
【0078】
次に、図15に車車間通信アプリケーションの別のアプリケーションである右折事故の車両配置例を示す。車両1が受信車両(一の車両)であり、車両2が所望の送信車両(他車両)である。図15の右折事故防止例の場合、受信車両に割当てられた周波数チャネルはf1に対し、右折事故防止アプリケーションの送信車両対象車線に割当てられたチャネルはf2である。そして、チャネル割当手段151は、受信車両(一の車両)に割当てられた周波数チャネルf1を取得する。そして、送信手段152は、周波数チャネルf1で、第一車両配置情報を、MM−SA方式で他車両に送信する。
【0079】
また、チャネル割当手段151は、上述したように、割り当てられた周波数チャネルが、他車両が利用する周波数チャネルと重複する場合、例えば、以下のようにチャネル割り当てを行う。図3は、周波数チャネルの基本割当について示した図である。基本割当状態(図3)では、真北を基準に±45度範囲の割り当て周波数は「f4」、真東を基準に±45度範囲の割り当て周波数は「f1」、真南を中心に±45度範囲の割り当て周波数は「f2」、真南を中心に±45度範囲の割り当て周波数は「f3」と決められている、とする。そして、基本割当ルールとして、f2はf4の対向車線用、f3はf1の対向車線用とする。
【0080】
そして、以下に、東西南北に整備されていない道路において、チャネル割当手段151が周波数チャネルを割り当てるアルゴリズムについて説明する。図4に示す様に、道路が真北を基準に角度θの傾きがあった場合、チャネル割当手段151は、例えば、4つの周波数に分けて、周波数チャネルを選択する。しかしながら、交差道路は必ずしも、90度で交差している分けではなく、鋭角で交差する道路も存在する。その場合、基本割当状態では、走行している道路は異なるが、同一の周波数を割当てしまうことになる。これを避ける方法を、図5および図6を用いて説明する。真北を基準に±45度範囲に2つの車両が同一の周波数f4を使用している場合を例に示す。チャネル割当手段151は、自律的に制御する際の優先順位を「(1)>(2)>(3)」とする、とする。
【0081】
図5は、車両1の進行方向は(2)の範囲、車両2の進行方向は(1)の場合の例を示したものである。この場合、(1)に存在する車両2の優先順位が高いので、チャネル割当手段151は、車両1の使用チャネルをf4から、f3へ変更する。図6は、車両1の進行方向は(2)、車両2の進行方向は(3)の場合の例を示している。この場合、優先順位条件から、車両2の方の優先順位が低いことから、チャネル割当手段151は、車両2の使用チャネルをf4からf1へ変更する。
【0082】
以下、本実施の形態における無線通信装置1の具体的な2つの動作について説明する。
(具体例1)
【0083】
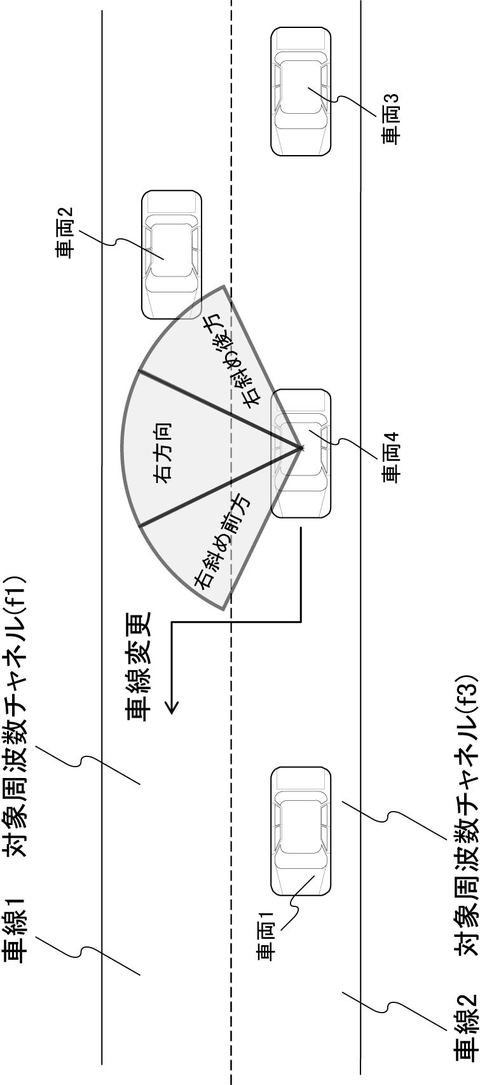
図16を用いて、一の車両(車両4)が車線変更を行う場合の例について説明する。このとき、右方向であっても、最も視認の困難な右斜め後方への対応が重要となり、その対応支援のためにより細かい車両位置関係の特定が必要である。
【0084】
まず、第二車両配置情報受信部12は、他車両(車両2)から、他車両の位置情報(x2,y2)と進行方向情報(X2)とを含む第二車両配置情報を受信する。ここで、第二車両配置情報は、車両識別子(車両ID)、位置情報、シーケンス番号、進行方向情報を有する。また、車両2(車両ID=ID2)の位置情報は、位置(x2,y2)、方位(D2)、速度(V2)を含む。方位とは、車両2が向いている方角を示す情報である。速度とは、車両2の走行速度を示す情報である。また、シーケンス番号とは、第二車両配置情報を有するパケットが生成される場合に割り当てられる生成順を示す続き番号である。なお、通常、シーケンス番号が大きい値であるほど、パケットが新しいものである。また、進行方向情報は、例えば、真北を基準(0度)として、何度方向に向いているかを示す情報であり、通常、単位は度(分などの、さらに細かい単位を含んでも良い)である。
【0085】
そして、車両配置関係情報取得部13は、第二車両配置情報受信部12が受信した第二車両配置情報を用いて、他車両情報を構成する。つまり、車両配置関係情報取得部13は、車両配置関係情報取得部13は、第二車両配置情報に、当該第二車両配置情報が受信された時刻(T2)、自車両と他車両の相対距離(R2)、周波数チャネル(f1)、拡散符号(C2)を加え、他車両情報を構成する。そして、車両配置関係情報取得部13は、車両ID「ID2」に対応する他車両情報を更新する。更新対象の車両配置関係情報は、周辺車両情報格納手段130に格納されている。なお、時刻(T2)は、例えば、車両配置関係情報取得部13が保持している図示しない時計から取得された情報である。相対距離(R2)は、自車両の位置情報(経度,緯度)および他車両の位置情報(経度,緯度)を用いて算出された情報である。相対距離の算出方法は公知技術である。周波数チャネル(f1)は、第二車両配置情報を受信した周波数CHである。拡散符号(C2)は、物理層において受信したパケットを逆拡散するために用いた拡散符号を、物理層より上の層に通知することにより取得され得る。
【0086】
つまり、周辺車両情報格納手段130は、図17の周辺車両情報管理表を保持している。周辺車両情報管理表は、自車両情報(「車両ID=ID4」の情報)、および他車両情報(「車両ID=ID1,ID2,ID3」の情報)を管理している。自車両情報、および他車両情報は、「車両ID」「時刻」「位置情報」「シーケンス番号」「方向」「相対距離」「周波数CH」「拡散符号CH」を有する。なお、図17において、車両ID「ID2」のレコードは、上述した処理により更新されたレコードである。
【0087】
次に、第一車両配置情報取得部11は、図17の周辺車両情報管理表から、自車両(ID4)に対応する第一車両配置情報を読み出す。
【0088】
次に、車両配置関係情報取得部13は、「車両ID=ID2」に対応する第二車両配置情報を、図17の周辺車両情報管理表から、読み出す。
【0089】
そして、車両配置関係情報取得部13は、第一車両配置情報、および第二車両配置情報を用いて、以下のように、位置関係特定処理を行う。
【0090】
まず、他車両存在エリア特定手段131は、第一車両配置情報から、一の車両(ここでは、自車両とも言う)の位置を示す位置情報(x4,y4)を取得する。また、他車両存在エリア特定手段131は、第二車両配置情報から、他車両の位置を示す位置情報(x2,y2)を取得する。
【0091】
そして、他車両存在エリア特定手段131は、自車両と他車両の位置の差「X=x2−x4」「Y=y2−y4」を算出する。
【0092】
次に、他車両存在エリア特定手段131は、算出したX,およびYの符号から、図9(a)に従って、他車両の存在エリアの領域の角度(degree)を判断する。ここで、他車両存在エリア特定手段131は、他車両(車両4)の領域を(2)「90〜180度」であると判断した、とする。
【0093】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する進行方向情報(X4)が示す進行方向と他車両から受信した第二車両配置情報(パケット)中に含まれている進行方向情報(X2)が示す進行方向を比較して、±15度範囲であるので、自車両と他車両の進行方向は同一方向と、判断する。
【0094】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する位置情報(x4,y4)と、他車両から受信した第二車両配置情報中に含まれている位置情報(x2,y2)とを比較する。そして、右斜め前方、右方向、右斜め後方のいずれかのうち、他車両存在方向特定手段132は、他車両(車両4)の領域を「右斜め後方」と判断した、とする。この判断方法は、上述した判断方法の数値(角度)を変更すれば可能であるので、詳細な説明を省略する(図16参照)。そして、他車両存在方向特定手段132は、両車両の進行方向が同一方向であり、かつ、他車両の存在エリアが、第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアであるので、当該他車両が前記一の車両に対して右斜め前方の先行する車両であることを示す右斜め前方車両であることを示す車両配置関係情報を取得する。なお、他車両の存在エリアが右斜め前方エリアであることを取得する処理は、他車両存在エリア特定手段131が行っても良い。
【0095】
次に、車両配置関係情報出力部14は、取得された車両配置関係情報「右斜め前方車両」を出力する。ここでの出力は、例えば、自車両の運転者への注意喚起(右斜め後方に他車両が存在する旨の表示、右斜め後方に他車両が存在することを知らせる音(ブザー音など)の出力など)を行っても良い。
【0096】
次に、チャネル割当手段151は、例えば、車線2に割り当てられた周波数f3を取得する。そして、周波数f3は、他車両の送信周波数f1とは異なるので、送信手段152は、周波数チャネルf3を用いて、第一車両配置情報を他車両に送信する。
【0097】
次に、自車両の運転者は、右にウィンカーを出して、車線変更しようとする、とする。すると、「右斜め後方」の存在する車両ID「ID2」の車両を検知されているので、車両配置関係情報出力部14は、自車両の運転者への注意喚起(右斜め後方に他車両が存在する旨の表示、右斜め後方に他車両が存在することを知らせる音(ブザー音など)の出力など)を行う。
【0098】
以上の処理により、車線変更時の事故防止を図ることができる。また、本具体例において、右方向エリアを3エリア「右斜め前方エリア」、「右方向エリア」、「右斜め後方エリア」にさらに詳細に分割し、左方向エリアを3エリア「左斜め前方エリア」、「左方向エリア」、「左斜め後方エリア」に分割した。かかる処理により、より細かい制御が可能となった。
(具体例2)
【0099】
図18を用いて、二輪車の左折巻き込み防止のアプリケーションの例を示したものである。かかる場合には、後続車両という情報だけでなく、横方向走行(並走)という情報も必要になってくる。
【0100】
まず、第二車両配置情報受信部12は、他車両(二輪車[車両ID=ID3])から、他車両の位置情報(x3,y3)と進行方向情報(X3)とを含む第二車両配置情報を受信する、とする。ここで、第二車両配置情報は、車両識別子(車両ID)、位置情報、シーケンス番号、進行方向情報を有する。また、車両3(車両ID=ID3)の位置情報は、位置(x3,y3)、方位(D3)、速度(V3)を含む。
【0101】
そして、車両配置関係情報取得部13は、第二車両配置情報受信部12が受信した第二車両配置情報を用いて、他車両情報を構成する。つまり、車両配置関係情報取得部13は、第二車両配置情報に、当該第二車両配置情報が受信された時刻(T3)、自車両と他車両の相対距離(R3)、周波数チャネル(f3)、拡散符号(C3)を加え、他車両情報を構成する。そして、車両配置関係情報取得部13は、図17の周辺車両情報管理表の他車両情報であり、車両ID「ID3」に対応する他車両情報を更新する。更新対象の車両配置関係情報は、周辺車両情報格納手段130に格納されている。なお、時刻(T3)は、例えば、車両配置関係情報取得部13が保持している図示しない時計から取得された情報である。
【0102】
次に、第一車両配置情報取得部11は、図17の周辺車両情報管理表から、自車両(ID4)に対応する第一車両配置情報を読み出す。
【0103】
次に、車両配置関係情報取得部13は、「車両ID=ID3」に対応する第二車両配置情報を、図17の周辺車両情報管理表から、読み出す。
【0104】
そして、車両配置関係情報取得部13は、第一車両配置情報、および第二車両配置情報を用いて、以下のように、位置関係特定処理を行う。
【0105】
まず、他車両存在エリア特定手段131は、第一車両配置情報から、一の車両(ここでは、自車両とも言う)の位置を示す位置情報(x3,y3)を取得する。また、他車両存在エリア特定手段131は、第二車両配置情報から、他車両の位置を示す位置情報(x2,y2)を取得する。
【0106】
そして、他車両存在エリア特定手段131は、自車両と他車両の位置の差「X=x4−x3」「Y=y4−y3」を算出する。
【0107】
次に、他車両存在エリア特定手段131は、算出したX,およびYの符号から、図9(a)に従って、他車両の存在エリアの領域の角度(degree)を判断する。ここで、他車両存在エリア特定手段131は、他車両(車両3)の領域を(4)「270〜360度」であると判断した、とする。
【0108】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する進行方向情報(X4)が示す進行方向と他車両から受信した第二車両配置情報(パケット)中に含まれている進行方向情報(X3)が示す進行方向を比較して、±15度範囲であるので、同一方向と、判断する。
【0109】
次に、他車両存在方向特定手段132は、自車両の第一車両配置情報が有する位置情報(x4,y4)と、他車両から受信した第二車両配置情報中に含まれている位置情報(x3,y3)とを比較する。そして、左斜め前方、左方向、左斜め後方のいずれかのうち、他車両存在方向特定手段132は、他車両(車両4)の領域を「左斜め後方」と判断した、とする。この判断方法は、上述した判断方法の数値(角度)を変更すれば可能であるので、詳細な説明を省略する(図18参照)。そして、他車両存在方向特定手段132は、両車両の進行方向が同一方向であり、かつ、他車両の存在エリアが、第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアであるので、当該他車両が前記一の車両に対して左斜め後方の車両であることを示す左側並走車両(特に、後方)であることを示す車両配置関係情報を取得する。なお、他車両の存在エリアが左斜め後方エリアであることを取得する処理は、他車両存在エリア特定手段131が行っても良い。
【0110】
次に、車両配置関係情報出力部14は、取得した車両配置関係情報「左側並走車両(特に、後方)」を出力する。ここでの出力は、例えば、自車両の運転者への注意喚起(左側の後方に並走する他車両が存在する旨の表示、左側の後方に並走する他車両が存在することを知らせる音(ブザー音など)の出力など)を行っても良い。
【0111】
次に、チャネル割当手段151は、例えば、車線2に割り当てられた周波数f3を取得する。そして、周波数f3は、他車両の送信周波数f1とは異なるので、送信手段152は、周波数チャネルf3を用いて、第一車両配置情報を他車両に送信する。
【0112】
次に、自車両の運転者は、左にウィンカーを出して、左折しようとする、とする。すると、「左斜め後方」の存在する車両ID「ID3」の車両を検知されているので、車両配置関係情報出力部14は、自車両の運転者への注意喚起(左斜め後方に他車両が存在する旨の表示、左斜め後方に他車両が存在することを知らせる音(ブザー音など)の出力など)を行う。
【0113】
以上の処理により、二輪車等の左折巻き込みの防止を図ることができる。また、本具体例において、右方向エリアを3エリア「右斜め前方エリア」、「右方向エリア」、「右斜め後方エリア」にさらに詳細に分割し、左方向エリアを3エリア「左斜め前方エリア」、「左方向エリア」、「左斜め後方エリア」に分割した。かかる処理により、より細かい制御が可能となった。
【0114】
以上、本実施の形態によれば、一の車両に対応する他車両の位置を、適切に取得できる。その結果、右折事故、出会い頭事故、歩行者事故、正面衝突事故、追突事故、左折事故、車線変更に伴う衝突事故などの防止を適切に図ることができる。
【0115】
なお、本実施の形態によれば、無線通信装置は、通常、一の車両に設置されているが、いわゆるサーバ装置に設置されていても良い。かかる場合、1以上の車両から送信された車両配置情報を収集し、各車両に送信するサーバ装置が存在する。
【0116】
また、本実施の形態において説明した他車両の位置を取得した結果の情報である車両配置関係情報の利用方法は問わない。つまり、他車両の位置を単に、一の車両のディスプレイに出力するだけでも良いし、注意喚起のために音(ブザー音など)を出力しても良いし、各種の事故防止のために自動車を自動制御するなどしても良い。かかる場合の車両配置関係情報の取得方法は以下のような方法である。つまり、第一車両配置情報取得部、第二車両配置情報受信部、および車両配置関係情報取得部により実現される車両配置関係情報の取得方法であって、前記第一車両配置情報取得部により、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得ステップと、前記第二車両配置情報受信部により、前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信ステップと、前記車両配置関係情報取得部により、前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得ステップとを具備する車両配置関係情報の取得方法である。
【0117】
上記方法において、車両配置関係情報取得ステップは、前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定サブステップを具備することは好適である。
【0118】
上記方法において、車両配置関係情報取得ステップは、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定サブステップをさらに具備することは好適である。
【0119】
上記方法において、前記他車両存在方向特定サブステップは、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して前方の先行する車両である前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して後方の後続する車両である後方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して右方向のエリアである右方向エリアである場合に、当該他車両が前記一の車両に対して右側を並走する車両である右側並走車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して左方向のエリアである左方向エリアである場合に、当該他車両が前記一の車両に対して左側を並走する車両である左側並走車両であることを示す車両配置関係情報を取得することは好適である。
【0120】
上記方法において、他車両存在方向特定サブステップは、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか、逆方向であるか、いずれでもないかを判断し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して接近している対向車両である接近対向車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して通過した対向車両である通過対向車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無い場合に、当該他車両が前記一の車両に対して隣接対応車両であることを示す車両配置関係情報を取得することは好適である。
【0121】
上記方法において、他車両存在方向特定サブステップは、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアである右斜め前方エリアである場合に、当該他車両が前記一の車両に対して右斜め前方の先行する車両である右斜め前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め後方のエリアである右斜め後方エリアである場合に、当該他車両が前記一の車両に対して右斜め後方の後続する車両である右斜め後方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め前方のエリアである左斜め前方エリアであるに、当該他車両が前記一の車両に対して左斜め前方の先行する車両である左斜め前方車両であることを示す車両配置関係情報を取得し、前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアである左斜め後方エリアである場合に、当該他車両が前記一の車両に対して左斜め後方の後続する車両である左斜め後方車両であることを示す車両配置関係情報を取得することは好適である。
【0122】
さらに、本実施の形態における処理は、ソフトウェアで実現しても良い。そして、このソフトウェアをソフトウェアダウンロード等により配布しても良い。また、このソフトウェアを光学ディスクなどの記録媒体に記録して流布しても良い。なお、このことは、本明細書における他の実施の形態においても該当する。なお、本実施の形態における情報処理装置を実現するソフトウェアは、以下のようなプログラムである。つまり、このプログラムは、コンピュータを、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得部と、前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信部と、前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得部と、前記車両配置関係情報を出力する車両配置関係情報出力部として機能させるためのプログラム、である。
【0123】
上記プログラムにおいて、前記車両配置関係情報取得部は、前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定手段を具備するものとして、コンピュータを機能させるためのプログラム、であることは好適である。
【0124】
また、上記プログラムにおいて、前記車両配置関係情報取得部は、前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定手段をさらに具備するものとして、コンピュータを機能させるためのプログラム、であることは好適である。
【0125】
また、図19は、本明細書で述べたプログラムを実行して、上述した実施の形態の無線通信装置等を実現するコンピュータの外観を示す。上述の実施の形態は、コンピュータハードウェア及びその上で実行されるコンピュータプログラムで実現され得る。図19は、このコンピュータシステム340の概観図であり、図20は、コンピュータシステム340のブロック図である。
【0126】
図19において、コンピュータシステム340は、磁気ディスクドライブ、光学ディスクドライブを含むコンピュータ341と、キーボード342と、マウス343と、モニタ344とを含む。
【0127】
図20において、コンピュータ341は、磁気ディスクドライブ3411、光学ディスクドライブ3412に加えて、MPU3413と、光学ディスクドライブ3412及び磁気ディスクドライブ3411に接続されたバス3414と、ブートアッププログラム等のプログラムを記憶するためのROM3415とに接続され、アプリケーションプログラムの命令を一時的に記憶するとともに一時記憶空間を提供するためのRAM3416と、アプリケーションプログラム、システムプログラム、及びデータを記憶するためのハードディスク3417とを含む。ここでは、図示しないが、コンピュータ341は、さらに、LANへの接続を提供するネットワークカードを含んでも良い。
【0128】
コンピュータシステム340に、上述した実施の形態の無線通信装置等の機能を実行させるプログラムは、光学ディスク3501、または磁気ディスク3502に記憶されて、光学ディスクドライブ3412または磁気ディスクドライブ3411に挿入され、さらにハードディスク3417に転送されても良い。これに代えて、プログラムは、図示しないネットワークを介してコンピュータ341に送信され、ハードディスク3417に記憶されても良い。プログラムは実行の際にRAM3416にロードされる。プログラムは、光学ディスク3501、磁気ディスク3502またはネットワークから直接、ロードされても良い。
【0129】
プログラムは、コンピュータ341に、上述した実施の形態の無線通信装置等の機能を実行させるオペレーティングシステム(OS)、またはサードパーティープログラム等は、必ずしも含まなくても良い。プログラムは、制御された態様で適切な機能(モジュール)を呼び出し、所望の結果が得られるようにする命令の部分のみを含んでいれば良い。コンピュータシステム340がどのように動作するかは周知であり、詳細な説明は省略する。
【0130】
なお、上記プログラムにおいて、情報を送信する送信ステップや、情報を受信する受信ステップなどでは、ハードウェアによって行われる処理、例えば、送信ステップにおけるモデムやインターフェースカードなどで行われる処理(ハードウェアでしか行われない処理)は含まれない。
【0131】
また、上記プログラムを実行するコンピュータは、単数であってもよく、複数であってもよい。すなわち、集中処理を行ってもよく、あるいは分散処理を行ってもよい。
【0132】
また、上記各実施の形態において、一の装置に存在する2以上の通信手段(第二車両配置情報受信部、第一車両配置情報送信部など)は、物理的に一の媒体で実現されても良いことは言うまでもない。
【0133】
また、上記各実施の形態において、各処理(各機能)は、単一の装置(システム)によって集中処理されることによって実現されてもよく、あるいは、複数の装置によって分散処理されることによって実現されてもよい。
【0134】
本発明は、以上の実施の形態に限定されることなく、種々の変更が可能であり、それらも本発明の範囲内に包含されるものであることは言うまでもない。
【産業上の利用可能性】
【0135】
以上のように、本発明にかかる無線通信装置は、一の車両に対応する他車両の位置を、適切に取得できる、という効果を有し、無線通信装置等として有用である。
【図面の簡単な説明】
【0136】
【図1】実施の形態1における無線ネットワークの概略図
【図2】同無線通信装置のブロック図
【図3】同周波数チャネルの基本割当について示した図
【図4】同周波数チャネルの割当処理について説明する図
【図5】同周波数チャネルの割当処理について説明する図
【図6】同周波数チャネルの割当処理について説明する図
【図7】同無線通信装置の動作について説明するフローチャート
【図8】同位置関係特定処理の動作について説明するフローチャート
【図9】同他車両の存在エリアを特定する処理について説明する図
【図10】同他車両の存在エリアを特定する処理について説明する図
【図11】同他車両の存在エリアを特定する処理について説明する図
【図12】同車両配置関係情報取得処理の動作について説明するフローチャート
【図13】同他車両の存在方向を特定する処理について説明する図
【図14】同出会い頭衝突防止の車両配置例を示す図
【図15】同右折事故の車両配置例を示す図
【図16】同車線変更を行う場合の例について説明する図
【図17】同周辺車両情報管理表を示す図
【図18】同二輪車の左折巻き込み防止のアプリケーションの例を示す図
【図19】同コンピュータシステムの概観図
【図20】同コンピュータシステムのブロック図
【符号の説明】
【0137】
1 無線通信装置
11 第一車両配置情報取得部
12 第二車両配置情報受信部
13 車両配置関係情報取得部
14 車両配置関係情報出力部
15 第一車両配置情報送信部
130 周辺車両情報格納手段
131 他車両存在エリア特定手段
132 他車両存在方向特定手段
151 チャネル割当手段
152 送信手段
【特許請求の範囲】
【請求項1】
車車間通信装置において利用される無線通信装置であって、
一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得部と、
前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信部と、
前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得部と、
前記車両配置関係情報を出力する車両配置関係情報出力部とを具備する無線通信装置。
【請求項2】
前記車両配置関係情報取得部は、
前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定手段を具備する請求項1記載の無線通信装置。
【請求項3】
前記車両配置関係情報取得部は、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定手段をさらに具備する請求項2記載の無線通信装置。
【請求項4】
前記他車両存在方向特定手段は、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して前方の先行する車両である前方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して後方の後続する車両である後方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して右方向のエリアである右方向エリアである場合に、当該他車両が前記一の車両に対して右側を並走する車両である右側並走車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して左方向のエリアである左方向エリアである場合に、当該他車両が前記一の車両に対して左側を並走する車両である左側並走車両であることを示す車両配置関係情報を取得する請求項3記載の無線通信装置。
【請求項5】
前記他車両存在方向特定手段は、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか、逆方向であるか、いずれでもないかを判断し、
前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して接近している対向車両である接近対向車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して通過した対向車両である通過対向車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無い場合に、当該他車両が前記一の車両に対して隣接対応車両であることを示す車両配置関係情報を取得する請求項4記載の無線通信装置。
【請求項6】
前記他車両存在方向特定手段は、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアである右斜め前方エリアである場合に、当該他車両が前記一の車両に対して右斜め前方の先行する車両である右斜め前方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め後方のエリアである右斜め後方エリアである場合に、当該他車両が前記一の車両に対して右斜め後方の後続する車両である右斜め後方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め前方のエリアである左斜め前方エリアであるに、当該他車両が前記一の車両に対して左斜め前方の先行する車両である左斜め前方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアである左斜め後方エリアである場合に、当該他車両が前記一の車両に対して左斜め後方の後続する車両である左斜め後方車両であることを示す車両配置関係情報を取得する請求項4または請求項5記載の無線通信装置。
【請求項7】
前記車両配置関係情報出力部が出力した前記車両配置関係情報を受け付け、当該車両配置関係情報を用いて、マルチキャリアおよびマルチコードからなるチャネルにより、前記第一車両配置情報を送信する第一車両配置情報送信部をさらに具備する請求項1から請求項6いずれか記載の無線通信装置。
【請求項8】
第一車両配置情報取得部、第二車両配置情報受信部、および車両配置関係情報取得部により実現される車両配置関係情報の取得方法であって、
前記第一車両配置情報取得部により、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得ステップと、
前記第二車両配置情報受信部により、前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信ステップと、
前記車両配置関係情報取得部により、前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得ステップとを具備する車両配置関係情報の取得方法。
【請求項9】
前記車両配置関係情報取得ステップにおいて、
前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定サブステップを具備する請求項8記載の車両配置関係情報の取得方法。
【請求項10】
前記車両配置関係情報取得ステップにおいて、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定サブステップをさらに具備する請求項9記載の車両配置関係情報の取得方法。
【請求項1】
車車間通信装置において利用される無線通信装置であって、
一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得部と、
前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信部と、
前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得部と、
前記車両配置関係情報を出力する車両配置関係情報出力部とを具備する無線通信装置。
【請求項2】
前記車両配置関係情報取得部は、
前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定手段を具備する請求項1記載の無線通信装置。
【請求項3】
前記車両配置関係情報取得部は、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定手段をさらに具備する請求項2記載の無線通信装置。
【請求項4】
前記他車両存在方向特定手段は、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して前方の先行する車両である前方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して後方の後続する車両である後方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して右方向のエリアである右方向エリアである場合に、当該他車両が前記一の車両に対して右側を並走する車両である右側並走車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無く、前記第一車両配置情報が有する位置情報が示す位置に対して左方向のエリアである左方向エリアである場合に、当該他車両が前記一の車両に対して左側を並走する車両である左側並走車両であることを示す車両配置関係情報を取得する請求項3記載の無線通信装置。
【請求項5】
前記他車両存在方向特定手段は、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか、逆方向であるか、いずれでもないかを判断し、
前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、一の車両の進行方向に一致するエリアまたは、当該エリアに対して所定の角度の範囲にある1以上のエリアである周辺規定エリア群である前方エリアである場合に、当該他車両が前記一の車両に対して接近している対向車両である接近対向車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアに対して180度分ずらしたエリア群である後方エリアである場合に、当該他車両が前記一の車両に対して通過した対向車両である通過対向車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が逆方向であり、かつ、前記他車両の存在エリアが、前記前方エリアでも無く、前記後方エリアでも無い場合に、当該他車両が前記一の車両に対して隣接対応車両であることを示す車両配置関係情報を取得する請求項4記載の無線通信装置。
【請求項6】
前記他車両存在方向特定手段は、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報から、両車両の進行方向が同一方向であるか否かを判断し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め前方のエリアである右斜め前方エリアである場合に、当該他車両が前記一の車両に対して右斜め前方の先行する車両である右斜め前方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の右斜め後方のエリアである右斜め後方エリアである場合に、当該他車両が前記一の車両に対して右斜め後方の後続する車両である右斜め後方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め前方のエリアである左斜め前方エリアであるに、当該他車両が前記一の車両に対して左斜め前方の先行する車両である左斜め前方車両であることを示す車両配置関係情報を取得し、
前記両車両の進行方向が同一方向であり、かつ、前記他車両の存在エリアが、前記第一車両配置情報が有する位置情報が示す位置の左斜め後方のエリアである左斜め後方エリアである場合に、当該他車両が前記一の車両に対して左斜め後方の後続する車両である左斜め後方車両であることを示す車両配置関係情報を取得する請求項4または請求項5記載の無線通信装置。
【請求項7】
前記車両配置関係情報出力部が出力した前記車両配置関係情報を受け付け、当該車両配置関係情報を用いて、マルチキャリアおよびマルチコードからなるチャネルにより、前記第一車両配置情報を送信する第一車両配置情報送信部をさらに具備する請求項1から請求項6いずれか記載の無線通信装置。
【請求項8】
第一車両配置情報取得部、第二車両配置情報受信部、および車両配置関係情報取得部により実現される車両配置関係情報の取得方法であって、
前記第一車両配置情報取得部により、一の車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第一車両配置情報を取得する第一車両配置情報取得ステップと、
前記第二車両配置情報受信部により、前記一の車両とは異なる他車両に設置された他の無線通信装置から、前記他車両の位置を示す位置情報と進行方向を示す進行方向情報とを含む第二車両配置情報を受信する第二車両配置情報受信ステップと、
前記車両配置関係情報取得部により、前記第一車両配置情報と前記第二車両配置情報とを用いて、前記他車両の前記一の車両に対する相対的な位置関係を含む情報である車両配置関係情報を取得する車両配置関係情報取得ステップとを具備する車両配置関係情報の取得方法。
【請求項9】
前記車両配置関係情報取得ステップにおいて、
前記第一車両配置情報が有する一の車両の位置情報が示す位置を原点とし、全方位を、予め決められた角度を有する2以上のエリアに分割し、前記第一車両配置情報が有する位置情報と前記第二車両配置情報が有する位置情報に基づいて、他車両が存在するエリアである存在エリアを特定し、当該存在エリアを識別するエリア識別子を有する車両配置関係情報を取得する他車両存在エリア特定サブステップを具備する請求項8記載の車両配置関係情報の取得方法。
【請求項10】
前記車両配置関係情報取得ステップにおいて、
前記第一車両配置情報が有する進行方向情報、前記第二車両配置情報が有する進行方向情報、および前記エリア識別子を用いて、前記一の車両と前記他車両との車両配置関係を示す車両配置関係情報を取得する他車両存在方向特定サブステップをさらに具備する請求項9記載の車両配置関係情報の取得方法。
【図2】


【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図13】
【図17】

【図19】
【図20】
【図1】
【図3】
【図4】
【図11】
【図14】
【図15】
【図16】
【図18】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図12】
【図13】
【図17】
【図19】
【図20】
【図1】
【図3】
【図4】
【図11】
【図14】
【図15】
【図16】
【図18】
【公開番号】特開2010−108457(P2010−108457A)
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願番号】特願2008−282630(P2008−282630)
【出願日】平成20年11月1日(2008.11.1)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20年度独立行政法人情報通信研究機構、研究テーマ「高レスポンスマルチホップ自律無線通信システムの研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
【公開日】平成22年5月13日(2010.5.13)
【国際特許分類】
【出願日】平成20年11月1日(2008.11.1)
【国等の委託研究の成果に係る記載事項】(出願人による申告)平成20年度独立行政法人情報通信研究機構、研究テーマ「高レスポンスマルチホップ自律無線通信システムの研究開発」に関する委託研究、産業技術力強化法第19条の適用を受ける特許出願
【出願人】(393031586)株式会社国際電気通信基礎技術研究所 (905)
【Fターム(参考)】
[ Back to top ]