
無線通信装置及び無線通信方法、並びに無線通信システム
【課題】heterogeneous環境下で、MTCで使用されるバーチャル・キャリヤを好適に運用する。
【解決手段】Pico eNodeBは、バーチャル・キャリヤをドナー帯域の中心72サブキャリヤの位置を避けて配置したり、バーチャル・キャリヤの運用を特定のサブフレームで停止したり、バーチャル・キャリヤの制御領域PDCCH_MTCを特定のサブフレームを避けて停止することによって、Macro eNodeBから送信されるサブフレームのデータ領域PDSCHに挿入された制御信号BCHや同期信号PSS、SSSからの干渉を回避する。
【解決手段】Pico eNodeBは、バーチャル・キャリヤをドナー帯域の中心72サブキャリヤの位置を避けて配置したり、バーチャル・キャリヤの運用を特定のサブフレームで停止したり、バーチャル・キャリヤの制御領域PDCCH_MTCを特定のサブフレームを避けて停止することによって、Macro eNodeBから送信されるサブフレームのデータ領域PDSCHに挿入された制御信号BCHや同期信号PSS、SSSからの干渉を回避する。
【発明の詳細な説明】
【技術分野】
【0001】
本明細書で開示する技術は、サイズの異なるセルが階層化された無線通信環境下において基地局として動作する無線通信装置及び無線通信方法、並びに無線通信システムに係り、特に、サイズの異なるセルが階層化された無線通信環境下におけるセル間の干渉を抑制する無線通信装置及び無線通信方法、並びに無線通信システムに関する。
【背景技術】
【0002】
現在、3GPP(Third Generatoin Partnership Project)では、第4世代移動通信システムの標準化作業が行なわれている。3GPPが策定したデータ通信仕様の1つである「LTE(Long Term Evolution)」は、第4世代(4G)のIMT−Advancedを目指した長期的高度化システムであり、「3.9G(スーパー3G)」とも呼ばれる。
【0003】
LTEでは、FDD(Frequency Division Duplex)とTDD(Time Division Duplex)の2通りの複信方式を選択することができる。FDDでは、アップリンク専用の帯域とダウンリンク専用の帯域を用いる。アップリンク及びダウンリンクでは、それぞれ連続する10個のサブフレームで構成される無線フレームのフォーマットを使用する。ここで言うアップリンクとは、端末局(UE端末:User Equipment)からLTEの基地局(eNodeB:evolved Node B)への通信のことであり、ダウンリンクとは、eNodeBからUE端末への通信のことである。TDDでも、連続する10個のサブフレームで構成される無線フレームのフォーマットを使用する。但し、TDDでは、アップリンク及びダウンリンクで同一の帯域を用いて通信を行なう。無線フレームを構成する各サブフレームは、eNodeBからの制御信号PDCCH(Phy Downlink Control Channel)と、ユーザー・データとして使うPDSCH(Phy Downlink Shared Channel)からなる。
【0004】
また、LTEでは、1セル繰り返しで、1つの周波数をすべてのセルで共通に使用する運用が行なわれる。これは、従来のセルラーのように、隣接する基地局間で異なる周波数を使ってしまうと、周波数資源が足りなくなるためである。その場合には、セルの周辺にいるUE端末)の送受信する電波が干渉を起こすことが問題となる。そこで、3GPPのRel8であるLTEでは、Rel8のインターセル・インターフェアレンス・コーディネーション(ICIC:Inter Cell Interference Coordination)という技術が用いられる。
【0005】
ICICは、例えば、1セル周波数繰り返しと複数セル周波数繰り返しを組み合わせたフラクショナル周波数繰り返しにより実現することができる。図14には、フラクショナル周波数繰り返しを行なう3つのセル1〜3が隣接している様子を示している。同図において、6角形は1つのセル範囲を示している。フラクショナル周波数繰り返しでは、各セルは、eNodeBから近いセル内部の中央領域(セル内部の白抜きされた領域)と、eNodeBから離間したセル端の周辺領域(セル端の網掛けを施した領域)に分けられる。eNodeBと中央領域のUE端末との通信に割り当てられる「中央周波数」は、隣接セルと競合するが(すなわち、1セル周波数繰り返し)、eNodeBは中央領域内でしか信号が届かないような小さな送信電力に抑えることで、セル間の干渉を回避する。一方、eNodeBは、周辺領域に信号が届くには大きな電力で送信しなければならないが、隣接セルの周辺領域同士は互いに異なる「周辺周波数」を使用することによって(すなわち、複数セル周波数繰り返し)、セル間の干渉を回避する。図示の例では、例えば20MHzの帯域を3つの帯域に分割し、隣接セル間で周辺周波数が重ならないようにして繰り返し使用される。図14中では周波数帯の相違を網掛けの種類(斜線、縦縞線、横縞線)で表している。
【0006】
また、3GPPのRel8のICICでは、上記の周波数繰り返し技術の技術以外に、基地局すなわちeNodeB間でX2インターフェースを介して干渉を抑制するための信号をやり取りしている。X2インターフェースは、eNodeB間を接続しているインターフェースであり、光ファイバーなどの伝送媒体が代表的である。このX2インターフェース経由でやり取りするメッセージとして、具体的には、High Interference Indicator(HII)とOverload Indicator(OI)が定義されている。
【0007】
HIIは、セル・エッジのUE端末に対して割り当てたリソース・ブロックの場所を隣接するeNodeBに知らせるための情報である。HIIで指定されたリソース・ブロックからは、干渉を受ける可能性が高いと判断できる。したがって、隣接セルではそのことを考慮して、当該リソース・ブロックに対してスケジューリングを行なう。一方、OIは、アップリンクのリソース・ブロックの干渉の度合いを知らせるための情報であり、Low/Medium/Highの3つのレベルを持っている。隣接するeNodeBは、あるリソース・ブロックへの干渉の度合いがHighであるとX2インターフェース経由のOIで通知されると、当該リソース・ブロックへのスケジューリングやアップリンクの電力制御を調整する。
【0008】
このように3GPPのRel8のICICは、マクロセル間の干渉除去を目的として、X2インターフェース経由で調整する方法をとっている。しかしながら、この方法により調整できる箇所はサブフレームのうちPDSCHだけであり、PDCCHの部分に関しては調整できない。PDCCHは、隣接セル同士で同じ帯域を使い、干渉に強く作られているフォーマットだからである。
【0009】
続いて、3GPPのRel10のICICについて説明する。Rel10のICICは、マクロセルとピコセルの間の干渉の抑制を目的としている。
【0010】
3GPPでは、HetNetと呼ばれるMacro/Micro/Pico/Femtoなどさまざまなサイズのセルを階層化してシステム全体の容量を向上する方式が検討されている。例えばピコセルの基地局であるPico eNodeBは、マクロセルの基地局であるMacro eNodeBよりも送信出力が数十dBのオーダーで小さいという特徴を持つ。Macro eNodeBとPico eNodeBの間は、X2インターフェースが存在していると仮定できる(言い換えれば、サブフレームのうちPDSCHの部分についての干渉は、Rel8のICICにより解決済みである)。但し、Pico eNodeBとMacro eNodeB間のX2インターフェースは、Macro eNodeB間のX2インターフェースよりも速度や容量や遅延の特性が脆弱なイン-ターフェースを仮定する必要がある場合もある。
【0011】
Pico eNodeBからの送信電力は小電力であるので、Macro eNodeBからの信号が強く受信できるエリアが多くなる。Pico cellからの伝搬ロスがMacro eNodeBからの伝搬ロスよりも小さい領域(若しくは、Macro eNodeBよりもPico cellからの距離が近い領域)であっても、Macro eNodeBからの受信電力の方が大きいと、UE端末は、近隣のPico eNodeBではなく遠くのMacro eNodeBにRRC(Radio Resource)_Connectedを試みることが多くなる。しかしながら、UE端末の電池の消費から考えるとアップリンクは伝搬ロスの小さい基地局に接続した方が有利であることと、HetNetなど異種のセルの組み合わせからなるheterogeneous環境ではピコセルにUE端末を振り分けてセル分割ゲインを得ることが重要であることから、Macro eNodeBにばかりUE端末が接続されてしまうという問題を解決する必要がある。
【0012】
そこで、Rel10では、Range Expansionという技術が規定されている。図15を参照しながら、Range Expansionについて説明する。UE端末は、セル・セレクションすなわち参入する基地局を決定するときに、eNodeBからのリファレンス信号(Cell−speciffic reference signal)から得られる受信電力(RSRP:Reference Signal ReceivedPower)に基づいて、電力が大きいeNodeBに参入することを選択する。eNodeB毎のRSRPを評価するときに、Pico eNodeBのRSRPには例えば10dBのオフセットを追加して評価することにより、Pico eNodeBへ参入するUE端末が存在するエリアを拡大する。これがRange Expansionであり、拡大されたエリアのことをRange Expansion Areaと呼ぶ。Range Expansion Areaは、Pico eNodeBからのRSRPが低いため、本来ならばUE端末はMacro eNodeBに参入するところ、RSRPのオフセットすなわちRange Expanshionの技術により、Pico eNodeBに参入できるようになった領域である。
【0013】
Range Expanshion Areaに存在するUE端末にとって、参入したPico eNodeBからよりもMacro eNodeBからの受信電力の方が大きいことがある。すなわち、Range Expanshion Areaでは、UE端末のPico eNodeBからの受信はMacro eNodeBからの干渉に対して弱くなっているという欠点がある。Range Expanshion Areaでは、Pico eNodeBとMacro eNodeB間でダウンリンクの干渉が問題になる訳である。
【0014】
例えば、移動局装置とマクロセルを管理する基地局装置と、フェムトセルやピコセル、ナノセルホームセルを管理するホーム基地局装置を含む通信システムにおいて、ホーム基地局装置に対する干渉を調整する通信システムについて提案がなされている(例えば、特許文献1を参照のこと)。しかしながら、この通信システムは、Range Expansion AreaのUE端末へのダウンリンク時の干渉を調整するものではない。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開2011−77964号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
本明細書で開示する技術の目的は、サイズの異なるセルが階層化された無線通信環境下において、セル間での干渉を好適に抑制することができる、優れた無線通信装置及び無線通信方法、並びに無線通信システムを提供することにある。
【0017】
本明細書で開示する技術のさらなる目的は、サイズの異なるセルが階層化された無線通信環境下において基地局として動作して、端末へのダウンリンク時のセル間干渉を好適に抑制することができる、優れた無線通信装置及び無線通信方法、並びに無線通信システムを提供することにある。
【課題を解決するための手段】
【0018】
本願は、上記課題を参酌してなされたものであり、請求項1に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される周波数位置の情報を取得する情報取得部と、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信するバーチャル・キャリヤ送信制御部と、
を具備する無線通信装置である。
【0019】
本願の請求項2に記載の技術によれば、請求項1に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれている。
【0020】
本願の請求項3に記載の技術によれば、請求項1に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれていない。
【0021】
また、本願の請求項4に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得する情報取得部と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止するバーチャル・キャリヤ運用部と、
を具備する無線通信装置である。
【0022】
本願の請求項5に記載の技術によれば、請求項4に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれている。
【0023】
本願の請求項6に記載の技術によれば、請求項4に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれていない。
【0024】
また、本願の請求項7に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得する情報取得部と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうち制御情報の送信を停止するバーチャル・キャリヤ運用部と、
を具備する無線通信装置である。
【0025】
本願の請求項8に記載の技術によれば、請求項7に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれている。
【0026】
また、本願の請求項9に記載の技術は、
隣接基地局がダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域が配置されている周波数帯の情報を取得する情報取得部と、
前記隣接基地局がバーチャル・キャリヤの制御領域を配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するサブフレーム送信制御部と、
を具備する無線通信装置である。
【0027】
本願の請求項10に記載の技術によれば、請求項9に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれている。
【0028】
また、本願の請求項11に記載の技術は、
隣接基地局Mが送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報が記載された帯域の情報を取得する情報取得部と、
自セルのダウンリンクのサブフレームのデータ領域で、前記隣接基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信するバーチャル・キャリヤ送信制御部と、
を具備する無線通信装置である。
【0029】
本願の請求項12に記載の技術によれば、請求項11に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれていない。
【0030】
また、本願の請求項13に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される周波数位置の情報を取得するステップと、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信するステップと、
を有する無線通信方法である。
【0031】
また、本願の請求項14に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得するステップと、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止するバーチャル・キャリヤ運用ステップと、
を有する無線通信方法である。
【0032】
また、本願の請求項15に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得するステップと、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちの送信を停止するバーチャル・キャリヤ運用ステップと、
を有する無線通信方法である。
【0033】
また、本願の請求項16に記載の技術は、
隣接基地局がダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域が配置されている周波数帯の情報を取得するステップと、
前記隣接基地局がバーチャル・キャリヤの制御領域Cを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するステップと、
を有する無線通信方法である。
【0034】
また、本願の請求項17に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報が記載された帯域の情報を取得するステップと、
自セルのダウンリンクのサブフレームのデータ領域で、前記隣接基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信するステップと、
を有する無線通信方法である。
【0035】
また、本願の請求項18に記載の技術は、
自セルのダウンリンクの所定の位置のサブフレームのデータ領域の所定の周波数位置に所定の必須情報を配置する第1の基地局と、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信する第2の基地局と、
を具備する無線通信システムである。
【0036】
但し、ここで言う「システム」とは、複数の装置(又は特定の機能を実現する機能モジュール)が論理的に集合した物のことを言い、各装置や機能モジュールが単一の筐体内にあるか否かは特に問わない(以下、同様)。
【0037】
また、本願の請求項19に記載の技術は、
自セルのダウンリンクの所定の位置のサブフレームのデータ領域に所定の必須情報を配置する第1の基地局と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止する第2の基地局と、
を具備する無線通信システムである。
【0038】
また、本願の請求項20に記載の技術は、
自セルのダウンリンクの所定の位置のサブフレームのデータ領域に所定の必須情報を配置する第1の基地局と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちの送信を停止する第2の基地局と、
を具備する無線通信システムである。
【0039】
また、本願の請求項21に記載の技術は、
自セルのダウンリンクのサブフレームのデータ領域の所定の周波数帯で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを送信する第1の基地局と、
前記第1の基地局がバーチャル・キャリヤの制御領域を配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信する第2の基地局と、
を具備する無線通信システムである。
【0040】
また、本願の請求項22に記載の技術は、
自セル内の全端末宛ての制御情報を含んだサブフレームを送信する第1の基地局と、
自セルのダウンリンクのサブフレームのデータ領域で、前記第1の基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信する第2の基地局と、
を具備する無線通信システムである。
【発明の効果】
【0041】
本明細書で開示する技術によれば、サイズの異なるセルが階層化された無線通信環境下において基地局として動作して、Range Expansion Areaの端末へのダウンリンク時のセル間干渉を好適に抑制することができる、優れた無線通信装置及び無線通信方法、並びに無線通信システムを提供することができる。
【0042】
本明細書で開示する技術によれば、Macro eNodeBとPico eNodeBの間で干渉問題を効率よく解決することができるので、各セルのスループットを向上させることができる。
【0043】
本明細書で開示する技術によれば、MTCで使用されるバーチャル・キャリヤを、HetNetなど異種のセルの組み合わせからなるheterogeneous環境下で好適に運用することができる。
【0044】
本明細書で開示する技術のさらに他の目的、特徴や利点は、後述する実施形態や添付する図面に基づくより詳細な説明によって明らかになるであろう。
【図面の簡単な説明】
【0045】
【図1】図1は、狭帯域運用の制御領域PDCCH_MTCとデータ領域PDSCH_MTCがドナー帯域のデータ領域PDSCHに配置される様子を示した図である。
【図2】図2は、Pico eNodeBのPDCCH_MTCがMacro eNodeBのPSS、SSSと重なるケースを例示した図である。
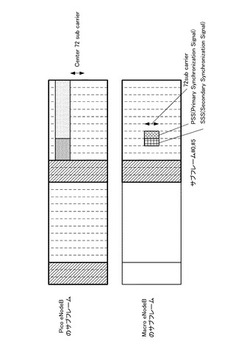
【図3】図3は、バーチャル・キャリヤが使用する狭帯域を、ドナー帯域の中心72サブキャリヤを避けて配置した様子を示している。
【図4】図4は、BCH、PSS、SSSが存在するサブフレームにおいてバーチャル・キャリヤの制御領域PDCCH_MTCを停止する様子を示した図である。
【図5】図5は、Macro eNodeBのPDCCHと、Pico eNodeBのPDCCH_MTCの位置が重なっている様子を示した図である。
【図6】図6は、Macro eNodeB側の制御領域PDCCHのUE Specific Search Spaceを、Pico eNodeB側の制御領域PDCCH_MTCで使用する中心の72サブキャリヤを除いて指定した様子を示した図である。
【図7】図7は、バーチャル・キャリヤの制御領域PDCCH_MTCを、PDCCHのCommon Search Spaceを避けて配置する様子を示した図である。
【図8】図8は、バーチャル・キャリヤの制御領域PDCCH_MTCを、PDCCHのCommon Search Spaceを避けて配置する様子を示した図である。
【図9】図9は、Pico eNodeBとして動作する無線通信装置900の構成例を模式的に示した図である。
【図10】図10は、図9に示したPico eNodeBに属するUE端末として動作する無線通信装置1000の構成例を模式的に示した図である。
【図11】図11は、ピコセル内でバーチャル・キャリヤを運用するための処理手順を示したフローチャートである。
【図12】図12は、Macro eNodeBとして動作する無線通信装置1200の構成例を模式的に示した図である。
【図13】図13は、図12に示したMacro eNodeBに属するUE端末として動作する無線通信装置1300の構成例を模式的に示した図である。
【図14】図14は、フラクショナル周波数繰り返しを行なう3つのセル1〜3が隣接している様子を示した図である。
【図15】図15は、3GPPのRel10で規定されるRange Expansionを説明するための図である。
【図16】図16は、LTEのダウンリンクの無線フレーム構成を示した図である。
【図17】図17は、FDDのダウンリンクのサブフレームに同期信号PSS、SSSが挿入される場所を示した図である。
【図18】図18は、TDDのダウンリンクのサブフレームに同期信号PSS、SSSが挿入される場所を示した図である。
【図19】図19は、ダウンリンクのサブフレームにシステム・インフォメーションBCHが挿入される場所を示した図である。
【図20】図20は、通常のサブフレームの構造を例示した図である。
【図21】図21は、通常のABSが設定されたサブフレームの構造を例示した図である。
【図22】図22は、MBSFN型のABSが設定されたサブフレームの構造を例示した図である。
【図23】図23は、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつけた例を示した図である。
【図24】図24は、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつけない例を示した図である。
【発明を実施するための形態】
【0046】
以下、図面を参照しながら本明細書で開示する技術の実施形態について詳細に説明する。
【0047】
LTEでは、OFDM変調方式を基本とした通信方式であり、また、ダウンリンクの無線アクセス方式にはOFDMAが採用されている。図16には、LTEのダウンリンクの無線フレーム構成を示している。図示のように、無線フレームは、時間単位の短い順に、タイムスロット(Slot)、サブフレーム(Subframe)、無線フレーム(Radio Frame)の3層に階層化されている。
【0048】
0.5ミリ秒長のタイムスロットは、7個のOFDMシンボルで構成され(但し、通常のユニキャスト伝送の場合)、ユーザー(移動局)側で受信する際の復調処理の単位となる。1ミリ秒長のサブフレームは、連続する2個のタイムスロット(14OFDMシンボル)で構成され、訂正符号化された1データ・パケットの送信時間単位となる。10ミリ秒長の無線フレームは、連続する10個のサブフレーム(すなわち、20個のタイムスロット)で構成され、すべての物理チャネルの多重に対する基本単位となる。サブフレームは、eNodeBからの制御信号として使う制御領域PDCCHと、ユーザー・データとして使うデータ領域PDSCHの部分に分けられる。
【0049】
各ユーザーは、異なるサブキャリヤ、又は、異なるタイムスロットを使用すれば、互いに干渉することなく通信することができる。LTEでは、連続するサブキャリヤをブロック化して、「リソース・ブロック(RB)」と呼ばれる、無線リソース割り当ての最小単位が定義される。基地局に搭載されているスケジューラーは、各ユーザーに対して、リソース・ブロック単位で無線リソースが割り当てる。リソース・ブロックは、12サブキャリヤ×1タイムスロット(7OFDMシンボル=0.5ミリ秒)からなる。また、サブフレームの先頭から最大3OFDMシンボルが、コントロール・チャネルすなわちPDCCHに使用される。基地局のスケジューラーは、サブフレーム毎すなわち1ミリ秒間隔で、リソース・ブロックの割り当てを行なうことができる。リソース・ブロックの位置情報をスケジューリングと呼ぶ。アップリンクのスケジューリング情報及びダウンリンクのスケジューリング情報は、ともにダウンリンクのコントロール・チャネル内に記載される。各ユーザーは、コントロール・チャネルを見て、自分に割り当てられたリソース・ブロックを認識することができる。
【0050】
0.5ミリ長のタイムスロットは、各ユーザーが使用できる割り当ての最小単位である。基地局(eNodeB)に搭載されているスケジューラーは、ユーザー毎にタイムスロット単位で使用してもよいタイムスロットを割り当てる。LTEでは、FDDとTDDの2通りの通信方式を選択することができる。TDDの場合には、1サブフレーム毎にアップリンク又はダウンリンクのいずれに使用するかを選択することができる。
【0051】
図16に示したように、ダウンリンクの無線フレームは10個の連続するサブフレームからなるが、所定位置に同期信号とシステム・インフォメーションがそれぞれ挿入される。
【0052】
同期信号は、PSS(Primary Synchronization Signal)とSSS(Secondary Synchronization Signal)の2種類がある。同期信号が挿入されるサブフレーム及びOFDMシンボルの位置は、Duplex modeがFDDの場合とTDDの場合で異なる。FDDの場合、図17に示すように、PSSとSSSはともにサブフレーム#0と#5に挿入される。1スロット目の最後のOFDMシンボルにPSS、その手前のOFDMシンボルにSSSがそれぞれ挿入される。また、TDDの場合には、図18に示すように、PSSはサブフレーム#1と#6の1スロット目の先頭から6OFDMシンボルの位置に挿入され、SSSはサブフレーム#0と#5の2スロット目の最後のOFDMに挿入される。どちらの場合も、使用する帯域の中心の72サブキャリヤが用いられる。これら同期信号PSS、SSSは、UE端末が最初に受信する信号なので、すべてのダウンリンクの信号の中で最も重要な信号ということができる。この信号を受信できない場合は、UE端末は、セルに参入するための後のステップを実行することができない。
【0053】
また、システム・インフォメーションには、MIB(Master Information Block)とSIB(System Information Block)が存在する。MIBには、使用するバンド幅、System Frame Number、Hybrid ACKのコンフィギュレーションといった、最初の段階でデータを受信するために必須の情報が格納される。SIBは、その他のシステム情報であって重要な情報であるが、MIBの方がより重要な情報である。MIBは、BCH(Broadcast CHannel)というチャネルで送信される。また、SIBは、PDSCHで送られると規定されている。Duplex modeがFDDの場合とTDDの場合ともに、図19に示すように、BCHはサブフレーム#0の2スロット目の先頭から4OFDMシンボルに挿入され、周波数帯域の中で中心の72サブキャリヤが用いられる。このBCHの領域は非常に重要なので、BCHへの干渉を抑制することが非常に重要である。
【0054】
ここで、3GPPのRel10で規定されているRange Expansion AreaにおけるPico eNodeBとMacro eNodeB間でダウンリンクの干渉問題について、[背景技術]の欄に引き続いて考察する。
【0055】
上述したように、Range Expanshion AreaにいるUE端末にとって、参入したPico eNodeBからよりもMacro eNodeBからの受信電力の方が大きいことがある。すなわち、Range Expanshion Areaでは、UE端末の受信はMacro eNodeBからの干渉に弱くなっているという欠点がある。
【0056】
また、上述したように、Macro eNodeBとPico eNodeBの間は、X2インターフェースが存在していると仮定できることから、サブフレームのうちPDSCHの部分についての干渉は、Rel8のICICにより解決済みである。ところが、Range Expanshion Areaでは、PDSCHの部分についてはRel8のICIC技術を用いて調整を行なったとしても、PDCCHの部分の干渉が問題になってくる。
【0057】
Rel8では、PDCCHは、同程度の送信出力を持つMacro eNodeB同士の干渉に耐えられるように設計されている。ところが、Rel10では、Range ExpanshionによりRSRPが評価されるために、Macro eNodeBからはPico eNodeBよりも数10dBの大電力で送信されることになり、Pico eNodeBから送信されるPDCCHは、Macro eNodeBから送信されるPDCCHにより干渉受け易くなるという問題がある。特にRange Expansion Areaに存在するUE端末は、Pico eNodeBからのPDCCHを受信することができなくなってしまう。
【0058】
このため、Rel10のICICは、マクロセルとピコセルの間の干渉の抑制を目的としている。Rel10のICICでは、Macro eNodeBが送信する無線フレーム中の10個のサブフレームのうち、出力を停止するサブフレームをいくつか設けるという解決方法をとっている。このように出力を停止するサブフレームは、ABS(Almost BlankSubframe)と呼ばれる。
【0059】
図20には、通常のサブフレームの構造を例示している。同図において、横軸は時間、縦軸は周波数とする。サブフレームは、eNodeBからの制御信号PDCCHと、ユーザー・データとして使うPDSCHからなる(前述)。図示の例では、先頭から3つ目までのOFDMシンボルがPDCCHであり、4つ目以降のOFDMシンボルがPDSCHである。また、PDCCH並びにPDSCHの双方にそれぞれ、CRS(Cell−Specific Reference Signal)と呼ばれる信号が挿入されている。図20中、黒で塗り潰したリソース・ブロック部分がCRSの信号に相当する。通常のダウンロードのサブフレームの信号を停止しようとしても、PDSCHの部分のデータ部分のみ停止可能である。PDSCH部分の停止は、基地局(eNodeBのスケジューラーがPDSCHへの割り当てを停止することにより実現できる。しかしながら、基地局(eNodeBは、PDSCHのCRSを停止することはできない。同様に、基地局(eNodeBは、PDCCHのCell Specific Reference Signalも停止することはできない。すなわち、ABSが設定されても、通常のサブフレームであれば、CRSを挿入しなければならない。図21には、通常のABSが設定されたサブフレームの構造を例示しているが、CRSの信号が挿入されていないリソース・ブロック部分しか停止することはできない。
【0060】
3GPPのRel10では、PDSCHのCRSまで停止するために、ABSのサブフレームをMBSFN(Multimedia Broadband Single Frequency Network)のサブフレームに設定することが行なわれている。MBSFNのサブフレームは、SFNを用いて放送用に用いられるサブフレームであり、通常のCRSを送信しない。UE端末はMBSFNサブフレームであると認識すると、PDSCHのCRSを受信しなくてもよいという特徴がある。UE端末に対して通常のABSのサブフレームをMBSFNのように装うことで、PDSCHのCRSを停止することができる。但し、MBSFNのサブフレームにおいても、PDCCHのCRSまで停止することはできない。図22には、MBSFN型のABSが設定されたサブフレームの構造を例示しているが、PDCCHのCRSは停止されない。
【0061】
要するに、Rel10では、ABSとして、通常のABSとMBSFN型のABSの2種類が存在する。通常のABSのサブフレームは、図21に示すように、PDCCHとPDSCHのCRSだけは残り、その他のリソース・ブロック部分は無送信となる。また、MBSFN型のABSのサブフレームは、図22に示すように、PDCCHのCRSだけは残り、その他の部分は無送信となる。図21及び図22中、黒で塗り潰したリソース・ブロック部分がCRSの信号に相当し、白抜きのリソース・ブロック部分は無送信に相当する。
【0062】
上述したように、Range Expanshion Areaでは、UE端末のPico eNodeBからの受信はMacro eNodeBからの干渉に対して弱くなっている。一方、図21、図22に示すように、ABSが設定されたサブフレームは大部分が無送信となるから、Macro eNodeBでABSが設定されたサブフレームに対応するPico eNodeBのサブフレームは干渉に強い。したがって、Pico eNodeBは、Macro eNodeBでABSが設定されたサブフレームに、Range Expansion AreaのUE端末に対するリソースを多く割り当てると、干渉を回避して効率よくダウンリンクの通信を行なうことができる。
【0063】
Macro eNodeBとPico eNodeBのサブフレームには、オフセットをつける運用とオフセットをつけない運用が考えられる。図23には、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつけた場合の一例を示している。図示の例では、時間方向に7サブフレームプンだけオフセットが付けられている。また、図24には、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつけない場合の一例を示している。
【0064】
図18〜図20を参照しながら既に説明したように、無線フレーム中の特定のサブフレーム位置に、干渉を抑制することが非常に重要な同期信号PSS、SSSとシステム・インフォメーションBCHが挿入されている。eNodeBは、これらの信号の送信を停止する訳にはいかない。図24に示したようにサブフレームにオフセットをつけないと、同期信号PSS、SSSやシステム・インフォメーションBCHが挿入されたサブフレームの位置がMacro eNodeBとPico eNodeBで揃ってしまい、Macro eNodeBがABSを設定して衝突を回避することはできない。
【0065】
一方、図23に示したようにサブフレームにオフセットをつける運用では、同期信号PSS、SSSやシステム・インフォメーションBCHが挿入されたサブフレームの位置がMacro eNodeBとPico eNodeBで揃わない。例えばPico eNodeBは、Macro eNodeBがABSを設定したサブフレームで同期信号PSS、SSSやシステム・インフォメーションBCHを送れるよう、オフセットをつければよい。したがって、eNodeB間での同期信号PSS、SSSやシステム・インフォメーションBCHの信号の干渉を考慮すると、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつける運用が一般的になってくると思料される。
【0066】
付言すると、ABSを設定したサブフレームでは、PDCCHとPDSCHの両方の送信をほとんど停止してしまう。サブフレームのうちPDSCHの部分についての干渉は、上述したようにRel8のICICにより解決済みである。それにも拘らず、ABSでPDSCHまで送信を停止してしまうのは、PDCCHの中には各UE端末がどこのリソース・ブロックで受信を行なうかというスケジューリング情報が含まれているためであり、PDCCHだけを停止してPDSCHは送信するということはできないからである。
【0067】
ここで、PDCCHのデコーディング方法について説明しておく。
【0068】
PDCCHの送信は、CCE(Control Channel Element)と呼ばれる36シンボルからなるResource Elementを単位として行なわれる。PDCCHはQPSK(Quadrature Phase Shift Keying)で変調されるので、CCEの1単位で72ビットの情報を送信することができる。CCEにはAggregationすなわち同じ情報の繰り返し送信が適用される。繰り返し回数すなわちCCE Aggregation Levelとして、1、2、4、8の値をとることができる。CCE Aggregation Levelが上がるとSNが向上することは自明である。セル半径が大きくなるとSNの低下を防ぐために、CCE Aggregation Levelが上がる。
【0069】
UE端末は、自分宛てのCCEの場所を認識できないときには、Blind Decoding、すなわち取り敢えずデコードしてみる。そして、CRC(Cyclic Redundancy Check)エラーが発生しなかったら、UE端末は自分宛てのCCEと認識する。eNodeBでは、UE端末固有の番号(UE identity=C−RNTI(Cell Radio Network Temporary Identity)を用いて各CCEにCRCを付与しているので、対応するUE端末以外はCCEをCRCチェックするとエラーになるはずである。
【0070】
上記のBlind Decodingは、サブフレームの制御領域PDCCHに挿入されているすべてのCCEをデコードすることになり、UE端末にとって負荷が大きくなる。そこで、Rel8ではSearch Spaceというものが導入されている。Search Spaceは、Common Search SpaceとUE Specific Search Spaceに分かれている。前者のCommon Search Spaceは、CCEの候補の先頭から連続的に配置される。Common Search Spaceは、CCE Aggregation Level=4、8のときにしか存在しない(言い換えれば、セル半径が大きいときしかCommon Search Spaceは存在しない)。また、Common Search Spaceの領域は、16CCEを必要としている。1CCEは36シンボルなので、1OFDMシンボル目の周波数が低い方から576サブキャリヤがCommon Search Spaceになる。
【0071】
UE Specific Search Spaceの中にあるCCEは、UE identityでCRCをマスクしてエンコードされている。したがって、UE端末は、UE Specific Search Spaceの中をBlind Decoding、すなわち自分のUE identiyを用いてCRCチェックを行ない、CRCにエラーがなければ自分宛てのCCEであることを知ることができる。また、Common Search Spaceは、すべてのUE端末がUE identityとCommon identityという2つのidentityでBlind decodingを試みるしくみになっている。
【0072】
eNodeBとUE端末で、UE Specific Search Spaceの場所を決めるための共通の関数(ハッシュ関数)を持っている。この関数にUE identityとサブフレーム番号を入力すると、関数の出力として、当該サブフレームのUE Specific Search Space内でのSearch Space、すなわちUE端末がCCEをデコードすべき場所を得ることができる。ハッシュ関数は、入力に対してランダムに見える出力値を出す関数である(周知)。ハッシュ関数にUE identityとサブフレーム番号を入力すると一定の範囲内でランダムに見える領域が出力される。したがって、UE identity又はサブフレームが異なれば、ほとんどの場合はハッシュ関数から異なるSearch Spaceが出力される。この関数の計算で2以上のUE端末のSearch Spaceが偶然ぶつかってしまった場合でも、次のサブフレームではぶつからない可能性が高くなっている。
【0073】
LTEでは、1.4MHzから20MHzまで6種類のバンド幅を選択することができる。各バンド幅におけるサブキャリヤ数を以下の表1に示す。
【0074】
【表1】

【0075】
各バンド幅において、1OFDMシンボルに入るCCEの数は、サブキャリヤ数を36で割った値に相当する。したがって、バンド幅が20MHzの場合、1OFDMシンボルに入るCCEは、上記の表1から、1201/36≒約33個であることが分かる。
【0076】
ところで、通信ネットワークの利用は、従来の携帯電話やPC(Personal Computer)のような人が直接利用する通常の端末以外にも、広がりを見せている。以降では、このような人が直接利用しない、機械と機械の間の通信のことをMTC(Machine Type Communication)と呼び、人が直接通信に利用しない端末のことをMTC端末と呼ぶことにする。MTCは、一般的に、M2M(machine to Machine)と呼ばれる技術と同義である。この反対語として、H2H(Human to Human)がある。
【0077】
MTC端末は、主として、サーバーとの間で、人間を介在しないで通信を行なう。例えば、医療系のアプリケーションとして、医療情報のサーバーへの送信が挙げられる。すなわち、人間の心電図を収集して、あるトリガー条件になったときに、収集した情報をサーバー側へアップリンクを使用して送信する。別のアプリケーションとして、自動販売機が挙げられる。サーバー側から管理している自動販売機に対して、一定周期(例えば30日)毎に売上を報告させることができる。
【0078】
MTCの特徴として、例えば以下のものが挙げられる。
【0079】
(1)移動がほとんどない。
(2)小容量のデータ転送。
(3)超低消費電力。
(4)各MTC端末をグルーピングしてハンドリング。
【0080】
上記の特徴は一般的なものであるが、MTCが上記の特徴をすべて持っている必要はない。どのような組み合わせで上記の特徴を有しているかは、アプリケーションに依存する。また、さまざまな特徴のMTCが存在することにも留意する必要がある。
【0081】
MTCは、通常の音声端末と異なり、人間が介在しない機器に取り付けられることが想定されている。したがって、将来的には、携帯電話端末よりも多い台数のMTC端末が市場に出回ることが予想されている。
【0082】
MTC端末の台数が多くなると、一斉に基地局に対して送受信要求を行なうことにより、基地局やコア・ネットワークが輻輳を起こすことが懸念されている。また、MTC端末の普及を促進するためには、コストを低減することが求められている。さらに、MTC端末が従来の携帯電話端末と共存できる必要がある。MTC端末のみのセルラー・ネットワークを新たに構築することは、コスト上考えられない。
【0083】
MTC端末のコストを削減する方法の1つとして、MTC端末が扱う周波数帯域を狭帯域にすることが挙げられる。これを、「バーチャル・キャリヤ」若しくは「狭帯域オペレーション」と呼ぶ。LTEでは、最大で20MHzのバンド幅を持つことが可能である(最大のバンド幅を、「ドナー帯域」と呼ぶ)。狭帯域オペレーションは、MTC端末の扱う帯域を例えば1.4MHzに制限する方法である。従来のLTE端末では、中心の1.4MHzを扱うCategory1のLTE端末が規定されているが、これは、中心周波数の1.4MHzだけを扱うものである。これに対し、狭帯域オペレーションでは、20MHzのバンド幅の中で、任意の1.4MHzを扱うような運用である。
【0084】
狭帯域オペレーションの場合には、制御信号であるPDCCHは、従来のPDSCHの領域の中に含まれると考えるのが一般的である。これは、MTCの狭帯域オペレーションと従来のLTEの規格との共存を考えると、従来のPDCCHの領域の中に、MTCの狭帯域運用時のPDCCHを入れ難いことが挙げられる。また、MTCは、端末の数が多くなることから、従来のPDCCHのリソースが枯渇するという問題もある。したがって、MTCのPDCCHは、PDSCHの領域の中に入れられると考えるのが自然である。以下では、このMTCの制御領域PDCCHのことをPDCCH_MTCと呼ぶことにする。また、MTCのデータ領域PDSCHのことをPDSCH_MTCと呼ぶことにする。
【0085】
Macro eNodeBとPico eNodeBの間の干渉問題は、eNodeB間で同期が完全な場合と完全でない場合、バーチャル・キャリヤが干渉を与える場合と干渉を受ける場合、に場合分けすることができる。
【0086】
課題1:BCH、PSS、SSSからPDCCH_MTCへの干渉
まず、Macro eNodeBとPico eNodeBの間で同期が完全な場合(サブフレーム単位でのオフセットは持っているが(図23を参照のこと)、OFDMシンボル単位では時間差がない場合)における、バーチャル・キャリヤの干渉問題について考察する。
【0087】
上述したように、MTCは、端末のコストを削減するために、狭帯域の運用(バーチャル・キャリヤ・オペレーション)が予想される。この狭帯域の運用では、eNodeBのドナー帯域20MHzの中で任意の狭帯域が選ばれると考える。図1に示すように、狭帯域運用すなわちバーチャル・キャリヤの制御領域PDCCH_MTCとデータ領域PDSCH_MTCは、ともにドナー帯域のデータ領域PDSCHに配置される。何故ならば、MTCは、狭帯域の幅しか受信できないため、ドナー帯域のPDCCHをすべて受信しデコードすることはできないからである。
【0088】
ここでは、PDCCH_MTCとPDSCH_MTCで構成されるバーチャル・キャリヤは、Pico eNodeB(小電力送信のノード)から送信されているキャリヤ(すなわち、バーチャル・キャリヤが被干渉の立場となること)を想定する。
【0089】
Macro eNodeBが送信する所定のサブフレームのPDSCHには、ドナー帯域の中心の72サブキャリヤに位置に、システム・インフォメーションBCHや同期信号PSS、SSSが挿入されている(図17〜図19を参照のこと)。これらの信号とPico eNodeBから送信されるPDCCH_MTCとの干渉を回避することが、MTCの狭帯域オペレーションを実現する上で1つの技術的課題となる。通常は、サブフレームのうちPDSCHについては、Rel8のICICで用意されているX2インターフェース経由で、干渉している箇所を調整することができる(前述)。しかしながら、BCH、PSS、SSSは重要な情報であるので、Macro eNodeBはこれらの送信を停止することはできない。一方、干渉を受けるPDCCH_MTCは、MTCにとっての制御情報が挿入されているので、この部分が干渉を受けると、PDSCH_MTCの送受信ができなくなってしまうという問題がある。
【0090】
この問題は、Macro eNodeBのBCH、PSS、SSSがPico eNodeBのバーチャル・キャリヤに与える影響を問題にしていることを再確認したい。Macro eNodeBの中のバーチャル・キャリヤの場合は、当然、Macro eNodeBのBCH及びPSS、SSSと同じ場所を避けてバーチャル・キャリヤを送信するので問題ない。
【0091】
また、Macro eNodeBとPico eNodeBの間であっても、Macro eNodeBのBCH、PSS、SSSの位置は、Pico eNodeBのBCH、PSS、SSSの位置と同じ場合は、Pico eNodeBのPDCCH_MTCは、Pico eNodeBのBCH、PSS、SSSの位置を避けて配置されるので、結果として、Macro eNodeBのBCH、PSS、SSSと重ならないのでは、という疑問が起きるかもしれない。
【0092】
しかしながら、この疑問は間違いである。Rel10のICICでは、図23に示したように、Macro eNodeBのサブフレームとPico eNodeBのサブフレームにオフセットをつけて運用することが考えられている。この場合、サブフレームの境界は同じで(OFDMシンボル単位で)同期していると言えるが、オフセットを持っているために、Macro eNodeBのBCH、PSS、SSSとPico eNodeBのBCH、PSS、SSSの位置は異なることになる。したがって、Pico eNodeBのPDCCH_MTCがMacro eNodeBのBCH、PSS、SSSと重なるケースは存在する。図2には、Pico eNodeBのPDCCH_MTCがMacro eNodeBのサブフレーム#0、#5のPDSCHに挿入されているPSS、SSSと重なる様子を示している。このような場合には、Macro eNodeBのBCH、PSS、SSSは、Rel8のICICを利用して送信を停止する(X2インターフェース経由で干渉を調整する)ということは不可能であるので、Pico eNodeBのPDCCH_MTCに大きな干渉を与える。PDSCH_MTCへの干渉はRel8のICICで回避可能であるが、PDCCH_MTCへの干渉が深刻である。
【0093】
手段1−1:バーチャル・キャリヤをドナー帯域の中心72サブキャリヤの位置を避けて配置する干渉回避方法を提案する。
【0094】
図3には、バーチャル・キャリヤが使用する狭帯域を、ドナー帯域の中心72サブキャリヤを避けて配置した様子を示している。この手段を用いれば、PDCCH_MTCは、BCH、PSS、SSSと周波数的に同じ場所になることはないので、BCH、PSS、SSSからPDCCH_MTCへの干渉を好適に回避することができる。図3は、Macro eNodeBとPico eNodeBの間で同期が完全な場合(サブフレーム単位でのオフセットは持っているが、隣接するサブフレーム同士でOFDMシンボル単位では時間差がない場合)にこの手段を適用した例を示しているが、勿論、同期が完全でない場合にも同様にこの手段を適用することができる。また、図3には、Pico eNodeB側でバーチャル・キャリヤが運用されている例を示したが、バーチャル・キャリヤがMacro eNodeBで運用されている場合であっても、この手段を適用することができる。
【0095】
Pico eNodeBは、X2インターフェース、S−GW(Serving Gateway)、並びにMME(Mobility Management Entity)経由で、Macro eNodeBと通信して、Macro eNodeB側で、制御信号BCHや同期信号PSS、SSSを挿入するサブフレームの位置を把握する。そして、Pico eNodeBは、Macro eNodeB側で制御信号BCHや同期信号PSS、SSSを挿入したサブフレームと重なる自セルのサブフレームでは、BCH、PSS、SSSが配置されるドナー領域の中心72サブキャリヤを避けて、バーチャル・キャリヤを送信するようにする。
【0096】
手段1−2:バーチャル・キャリヤの運用を特定のサブフレームで停止することによる干渉回避方法を提案する。
【0097】
バーチャル・キャリヤによる狭帯域の運用をドナー帯域中心の72サブキャリヤ内に配置した場合、BCH、PSS、SSSが存在するサブフレームでは、運用を停止する。BCH、PSS、SSSが存在するサブフレームは、FDDのダウンリンクとTDDのダウンリンクとで相違する(図17〜図19を参照のこと)。以下では、FDDとTDDに分けて説明する。
【0098】
FDDの場合には、Macro eNodeBの#0、#5のサブフレームに対応するPico eNodeBの中心の72サブキャリヤに配置されているバーチャル・キャリヤの運用を停止する。また、TDDの場合には、Macro eNodeBの#0、#1、#5、#6のサブフレームに対応するPico eNodeBの中心の72サブキャリヤに配置されているバーチャル・キャリヤの運用を停止する。
【0099】
この手段は、Macro eNodeBとPico eNodeBの間で同期が完全である場合にも、完全でない場合にも適用することができる。また、バーチャル・キャリヤがMacro eNodeBで運用されている場合、及び、Pico eNodeBで運用されている場合の両方で、この手段を適用することができる。
【0100】
Pico eNodeBは、X2インターフェース、S−GW、並びにMME経由で、Macro eNodeBと通信して、Macro eNodeB側で、制御信号BCHや同期信号PSS、SSSを挿入するサブフレームの位置を把握する。そして、Pico eNodeBは、Macro eNodeB側で制御信号BCHや同期信号PSS、SSSを挿入したサブフレームと重なる自セルのサブフレームでは、バーチャル・キャリヤの運用を停止する。
【0101】
手段1−3:バーチャル・キャリヤの制御領域PDCCH_MTCを特定のサブフレームを避けて停止することによる干渉回避方法を提案する。
【0102】
BCH、PSS、SSSが存在するサブフレームと重なるサブフレームでは、PDCCH_MTCを送信しない。但し、手段1−2では、BCH、PSS、SSSが存在するサブフレームでバーチャル・キャリヤ全体の運用を停止するのに対し、手段1−3では、制御領域PDCCH_MTCの送信を停止するがデータ領域PDSCH_MTCの運用は行なう点で相違する。図4には、Macro eNodeBとPico eNodeBの間で同期が完全な場合(サブフレーム単位でのオフセットは持っているが、隣接するサブフレーム同士でOFDMシンボル単位では時間差がない場合)にこの手段を適用した例を示している。また、図4に示した例では、Pico eNodeB側でバーチャル・キャリヤが運用されており、Macro eNodeB側のBCH、PSS、SSSが存在するサブフレームにおいて、Pico eNodeBは、バーチャル・キャリヤの制御領域PDCCH_MTCを停止している。勿論、バーチャル・キャリヤがMacro eNodeBで運用されている場合であっても、この手段を適用することができる。ここで、PDSCH_MTCとBCH、PSS、SSSとの干渉は、Rel8のICICにより回避する(X2インターフェース経由で干渉を調整する)。通常は、Pico eNodeBからのPDSCH_MTCの送信を抑制する方法で、BCH、PSS、SSSとの干渉の抑制を行なう。
【0103】
Pico eNodeBは、X2インターフェース、S−GW、並びにMME経由で、Macro eNodeBと通信して、Macro eNodeB側で、制御信号BCHや同期信号PSS、SSSを挿入するサブフレームの位置を把握する。そして、Pico eNodeBは、Macro eNodeB側で制御信号BCHや同期信号PSS、SSSを挿入したサブフレームと重なる自セルのサブフレームでは、バーチャル・キャリヤのうち制御領域PDCCH_MTCの送信を停止する。
【0104】
図9には、上記の各手段1−1、1−2、1−3を実現するPico eNodeBとして動作する無線通信装置900の構成例を模式的に示している。
【0105】
無線通信装置900は、アンテナで送受信する無線信号のアナログ処理を行なうRF通信処理部901と、ディジタル送信信号の変調並びにディジタル受信信号の復調処理を行なうディジタル通信処理部902を備えている。ディジタル通信処理部902は、自装置900の通信レイヤーの上位層プロトコルとの間で送受信データをやり取りする。また、ディジタル通信処理部902は、X2インターフェース、S−GW、並びにMME経由で他のeNodeBと通信する。
【0106】
Macro eNodeBサブフレーム番号特定部905は、自分のピコセル(Range Expansion Area)を包含するマクロセルのMacro eNodeB側のサブフレーム番号を特定する。また、Pico eNodeBサブフレーム番号特定部906は、自分のピコセルのサブフレーム番号を特定する。
【0107】
バーチャル・キャリヤ・サブフレーム位置決定部904は、Macro eNodeB側のサブフレーム番号と自分のピコセルのサブフレーム番号に基づいて、バーチャル・キャリヤを送信するサブフレームの位置を決定する。ここで決定したサブフレームの位置は、例えばBCH信号を用いてピコセル内のUE端末(MTC端末)に通知される。
【0108】
バーチャル・キャリヤ制御部903は、バーチャル・キャリヤ・サブフレーム位置決定部904による決定結果に基づいて、バーチャル・キャリヤの運用を制御する。なお、手段1−1においては、バーチャル・キャリヤ・サブフレーム位置決定部904は、Macro eNodeB側の現在のサブフレーム番号がBCH、PSS、SSSなどの信号を含むサブフレームであることを示す場合には、ドナー帯域の中心72サブキャリヤを避けた周波数位置を決定する。また、手段1−2においては、バーチャル・キャリヤ・サブフレーム位置決定部904は、Macro eNodeB側の現在のサブフレーム番号がBCH、PSS、SSSなどの信号を含むサブフレームであることを示す場合には、バーチャル・キャリヤの運用停止を決定する。また、手段1−3においては、バーチャル・キャリヤ・サブフレーム位置決定部904は、Macro eNodeB側の現在のサブフレーム番号がBCH、PSS、SSSなどの信号を含むサブフレームであることを示す場合には、バーチャル・キャリヤの制御領域PDCCH_MTCの送信停止を決定するとともに、X2インターフェース経由での調整によりPDSCH_MTCの送信を抑制することを決定する。
【0109】
また、図10には、図9に示したPico eNodeBに属するUE端末(MTC端末)として動作する無線通信装置1000の構成例を模式的に示している。
【0110】
無線通信装置1000は、アンテナで送受信する無線信号のアナログ処理を行なうRF通信処理部1001と、ディジタル送信信号の変調並びにディジタル受信信号の復調処理を行なうディジタル通信処理部1002を備えている。ディジタル通信処理部1002は、自装置1000の通信レイヤーの上位層プロトコルとの間で送受信データをやり取りする。
【0111】
無線通信装置1000は、例えばBCH信号によって、Pico eNodeBからバーチャル・キャリヤを送信するサブフレーム位置が通知されている。バーチャル・キャリヤ・サブフレーム位置保持部1003は、自分が収容されたピコセル内でバーチャル・キャリヤが挿入されるサブフレームの位置を記憶している。そして、ディジタル通信処理部1002は、バーチャル・キャリヤが挿入されるサブフレームの位置において、バーチャル・キャリヤの受信処理を行なう。
【0112】
図11には、ピコセル内でバーチャル・キャリヤを運用するための処理手順をフローチャートの形式で示している。
【0113】
Pico eNodeBは、自分のピコセル内でバーチャル・キャリヤを送信するサブフレームの位置を決定する(ステップS1101)。
【0114】
次いで、Pico eNodeBは、ステップS1101で決定した上記情報を、BCH信号を用いて自セル内のUE端末(MTC端末)に通知する(ステップS1102)。
【0115】
そして、UE端末(MTC端末)は、バーチャル・キャリヤが挿入されたサブフレームの位置を認識して、その受信処理を行なう(ステップS1103)。
【0116】
課題2:PDCCHからPDCCH_MTCへの干渉
ここでは、PDCCH_MTCとPDSCH_MTCで構成されるバーチャル・キャリヤは、Pico eNodeB(小電力送信のノード)から送信されているキャリヤ(すなわち、バーチャル・キャリヤが被干渉の立場となること)を想定する。但し、バーチャル・キャリヤが与干渉の場合にも、同様の課題が存在するとともに、後述する手段で解決することができる。
【0117】
この課題は、Macro eNodeBとPico eNodeBの間の同期が完全でない場合に発生する。例えばPico eNodeBの同期精度を確保できなくて、Macro eNodeBとPico eNodeBの間にOFDMシンボル単位でのズレが生じている場合である。
【0118】
同期が完全でない場合も、課題1、すなわち、Macro eNodeBから送信されるBCH、PSS、SSSによるPico eNodeBのPDCCH_MTCへの干渉も依然として起きる可能性がある。しかし、課題2では、Macro eNodeBから送信されるPDCCHがPico eNodeBのPDCCH_MTCに与える影響に限定して考察する。
【0119】
Macro eNodeBとPico eNodeBの間の同期がずれる方向によっては、Macro eNodeBのPDCCHと、Pico eNodeBのPDCCH_MTCの位置が重なり、この結果、Pico eNodeBのRange Expansion AreaのUE端末がPDCCH_MTCを受信することが困難になることが予想される。図5には、Macro eNodeBのPDCCHと、Pico eNodeBのPDCCH_MTCの位置が重なっている様子を示している。
【0120】
Pico eNodeBの同期精度を確保できない場合だけでなく、Macro eNodeBとPico eNodeBのPDCCH間の干渉を低減するために、敢えて(意図して)OFDMシンボル単位でずらす場合もある。図5を再び参照すると、PDCCHとPDCCH_MTCの位置は重なっていないので、一方のPDCCHを優先して、他方のPDCCHを停止する必要がないことが分かる。したがって、このような状況下でバーチャル・キャリヤの制御領域PDCCH_MTCへの干渉を低減することは重要である。
【0121】
手段2−1:干渉源のeNodeBのPDCCHのUE Specific Search Spaceの範囲に制限をつける方法を提案する。
【0122】
すなわち、図6に示すように、Macro eNodeB側の制御領域PDCCHのUE Specific Search Spaceを、Pico eNodeB側の制御領域PDCCH_MTCで使用する中心の72サブキャリヤを除いて自セルのダウンリンクのサブフレームの制御情報PDCCHを配置して、Pico eNodeBのPDCCH_MTCを干渉しないようにする。
【0123】
図6に示す例では、制御信号自体が中心の72サブキャリヤを除いて配置される。したがって、UE端末側のSearch Spaceからこの中心の72サブキャリヤを除かなくても、UE端末で中心の72サブキャリヤの部分のCCEをBlind Decodingしても、CRCがエラーになるので、問題ない。あるいは、この部分はUE端末がUE Specific Search SpaceとしてSearchしないと認識してデコードしないという動作を行なうようにしてもよい。後者は、UE端末への負担が軽減されるというメリットがある。
【0124】
Macro eNodeBは、X2インターフェース、S−GW、並びにMME経由で、Pico eNodeBと通信して、バーチャル・キャリヤを配置している周波数帯を把握する。そして、Macro eNodeBは、Pico eNodeBがバーチャル・キャリヤの制御領域PDCCH_MTCを配置している周波数帯を外して、制御情報PDCCHを送信するようにする。
【0125】
なお、UE端末が中心の72サブキャリヤの部分をSearch若しくはデコードしないようにする方法として、UE Specific Search Spaceの場所を決定するハッシュ関数が、中心の72サブキャリヤの部分を避けて指定するようにすればよい。その1つの方法として、ハッシュ関数の指定するアドレスから中心の72サブキャリヤの部分を最初から除いて指定するようにすればよい。
【0126】
また、ハッシュ関数の指定を72サブキャリヤの左部分の領域から指定する方法、及び、右側の領域を左側と同一にするという方法がある。
【0127】
手段2−2:バーチャル・キャリヤの制御領域PDCCH_MTCを、PDCCHのCommon Search Spaceを避けて配置する方法を提案する。
【0128】
手段2−1のSearch Spaceの範囲に制限をつける方法は、Search SpaceとしてUE Specific Search Spaceを想定したものである。しかし、Macro eNodeBは、セル半径次第ではCommon Search Spaceが必要となる場合があり、これをCCEの先頭から連続して配置しなければならない。Common Search Spaceは、すべてのUE端末がSearchしてBlind Decodingを試行する領域であるので、送信を停止することは望ましくない。図6に示したように中心の72サブキャリヤを除いてCommon Search Spaceを配置する場合、このCommon Search Spaceが中心の72サブキャリヤの領域に到達してしまうと問題である。
【0129】
Common Search Spaceの領域は、1OFDMシンボル目の周波数が低い方から576サブキャリヤを必要とする(前述)。Macro eNodeBが20MHzのバンド幅を選択したときのサブキャリヤ数は1201であるから(表1を参照のこと)、CCEの先頭からCommon Search Spaceを連続的に配置すると、図7に示すように中心の72サブキャリヤには達しないので、手段2−1によりCommon Search Spaceを使用することが可能である。しかしながら、15MHz以下のバンド幅を選択したときには中心の72サブキャリヤを避けてCommon Search SpaceをCCEの先頭から連続的に配置することはできない。
【0130】
そこで、手段2−2として、図8に示すように、Pico eNodeBは、使用するバンド幅に合わせて、バーチャル・キャリヤを、Common Search Spaceの範囲を外して配置するようにする。また、Macro eNodeBは、手段2−1により、制御領域PDCCH(UE Specific Search Space)を、Pico eNodeB側の制御領域PDCCH_MTCで使用するサブキャリヤを除いて指定して、Pico eNodeBのPDCCH_MTCを干渉しないようにする。
【0131】
Pico eNodeBは、X2インターフェース、S−GW、並びにMME経由で、Macro eNodeBと通信して、Macro eNodeB側で、Common Search Spaceを記載している帯域の情報を取得する。 そして、Pico eNodeBは、このCommon Search Spaceの帯域を避けて、バーチャル・キャリヤの制御領域PDCCH_MTCを送信するようにする。
【0132】
図12には、上記の各手段2−1、2−2を実現するMacro eNodeBとして動作する無線通信装置1200の構成例を模式的に示している。
【0133】
無線通信装置1200は、アンテナで送受信する無線信号のアナログ処理を行なうRF通信処理部1201と、ディジタル送信信号の変調並びにディジタル受信信号の復調処理を行なうディジタル通信処理部1202を備えている。ディジタル通信処理部1202は、自装置1200の通信レイヤーの上位層プロトコルとの間で送受信データをやり取りする。また、ディジタル通信処理部1202は、X2インターフェース、S−GW、並びにMME経由で他のeNodeBと通信する。
【0134】
Macro eNodeBサブフレーム番号特定部1207は、Macro eNodeBのサブフレーム番号を特定する。Pico eNodeBサブフレーム番号特定部1208は、Pico eNodeBのサブフレーム番号を特定する。オフセット情報取得部1209は、Macro eNodeBとPico eNodeBのサブフレーム間のずれ量をOFDMシンボル単位で特定する。そして、干渉制御部1206は、Pico eNodeBが送信するバーチャル・キャリヤの制御領域PDCCH_MTCが存在する周波数帯を特定する。
【0135】
ハッシュ関数管理部1205は、干渉制御部1206でPDCCH_MTCを干渉すると同定された位置に応じて、各サブフレームで使用するハッシュ関数を決定する。Search Space決定部1204は、干渉制御部1206で干渉すると同定されたサブフレームかどうかを考慮しつつ、ハッシュ関数管理部1205で格納するハッシュ関数を用いて、自セルに参入している各UE端末のUE Specific Search Spaceの場所を決定する。具体的には、Macro eNodeB側の制御領域PDCCHのUE Specific Search Spaceを、Pico eNodeB側の制御領域PDCCH_MTCで使用する帯域を除いて指定Macro eNodeB側の制御領域PDCCHのUE Specific Search Spaceを、Pico eNodeB側の制御領域PDCCH_MTCで使用する中心の72サブキャリヤを除いて指定する。そして、CCE挿入制御部1203は、決定したSpecific Search Spaceに基づいて、各CCEのPDCCHへの挿入を制御する。
【0136】
また、図13には、図12に示したMacro eNodeBに属するUE端末として動作する無線通信装置1300の構成例を模式的に示している。
【0137】
無線通信装置1300は、アンテナで送受信する無線信号のアナログ処理を行なうRF通信処理部1301と、ディジタル送信信号の変調並びにディジタル受信信号の復調処理を行なうディジタル通信処理部1302を備えている。ディジタル通信処理部1302は、自装置1300の通信レイヤーの上位層プロトコルとの間で送受信データをやり取りする。
【0138】
ハッシュ関数管理部1305は、各サブフレームで使用するハッシュ関数を決定する。Search Space決定部1304は、Search Spaceの場所を決定する。また、Search Space決定部1304は、ハッシュ関数管理部1305で格納するハッシュ関数を用いて、自端末のUE Specific Search Spaceの場所を決定する。そして、Blind decoding部2003は、決定したUE Specific Search Spaceに基づいて、Macro eNodeBのPDCCHをBlind decodingする。
【0139】
なお、ドナー帯域20MHzの一部の帯域に制限したバーチャル・キャリヤを運用するには、バーチャル・キャリヤを送信するeNodeBに参入するUE端末(MTC端末)は、バーチャル・キャリヤの位置を認識する仕組みが必要である。以下では、MTC端末が、eNodeBからバーチャル・キャリヤを受信できるようになるための処理手順について説明する。
【0140】
ステップ1:MTC端末が、対応するeNodeBを選択する。
MTC端末は、ターゲットであるeNodeBに対して同期処理を行なう。同期処理は、特定のサブフレームに挿入されているPSSやSSS(前述)を用いて行なう。MTC端末は、同期したeNodeBからのCell Specific Reference signalなどのリファレンス信号を受信して、受信電力強度RSRPに相当する値を取得する。基本的にはRSRPが一番強いeNodeBに対して接続することを選択するが、MTC端末は、Pico eNodeBのRSRPに対しては10dB〜15dB程度のオフセットをつけて比較を行ない、Pico eNodeBに接続し易くする。MTC端末は、狭帯域の信号しか受信できないように製作されている。eNodeBのPSSやSSSは、ドナー帯域20MHzのうち中心の72サブキャリヤに配置されているので、RSRPの取得もこの中心の72サブキャリヤの信号を使って行うのが適当だと考ええられる。
【0141】
ステップ2:MTC端末が、選択したeNodeBのバーチャル・キャリヤの位置を把握する。
MTCは、接続するeNodeBを上記のステップ1により決定した後は、そのeNodeBにおいて、どの周波数位置(サブキャリヤ)を用いてバーチャル・キャリヤが運用されているかを把握する必要がある。
【0142】
その1つの方法として、eNodeBが送信するシステム情報を用いることが挙げられる。eNodeBからシステム情報BCHとしてブロードキャストされている情報の中に、バーチャル・キャリヤの周波数位置が記載されており、MTC端末は、ステップ1においてドナー帯域の中心72サブキャリヤを受信しているときに、このシステム情報を取得することにより、バーチャル・キャリヤの周波数位置を認識することができる。
【0143】
また、他の方法として、MTC端末がスキャンしてバーチャル・キャリヤを発見することが挙げられる。但し、スキャン動作はMTC端末への負荷が大きく、超低消費電力というMTCの特徴(前述)と相反することになる。
【0144】
ステップ3:MTC端末が、バーチャル・キャリヤの制御領域PDCCH_MTCの時間方向の位置情報を取得する。
【0145】
その1つの方法として、eNodeBが送信するシステム情報を用いることが挙げられる。eNodeBからシステム情報BCHとしてブロードキャストされている情報の中に、バーチャル・キャリヤの周波数位置が記載されており、MTC端末は、ステップ1においてドナー帯域の中心72サブキャリヤを受信しているときに、このシステム情報を取得することにより、バーチャル・キャリヤの時間方向の位置を認識することができる。
【0146】
また、他の方法として、MTC端末が、バーチャル・キャリヤの中をBlind Decodingして、所望の制御情報を取得することにより、その場所を取得することが挙げられる。Blind Decodingは、通常のPDCCHの中の自分宛てのCCEを取得する方法として、一般のLTEで用いられている方法である。ここでは、PDCCH_MTCの最初を示すCCEは、すべての端末が受信できるようにしておく。各MTC端末は、バーチャル・キャリヤ内をBlind Decodingし、CRCがOKとなる場所を探し、それをPDCCH_MTCの最初であると認識することができる。
【0147】
MTC端末は、以上のステップ1〜ステップ3の処理手順に従って、接続するeNodeBを決定し、バーチャル・キャリヤの位置を取得し、バーチャル・キャリヤ内のPDCCH_MTCの位置を取得することができ、この結果、本明細書で開示する技術を実施することが可能になる。
【0148】
なお、本明細書の開示の技術は、以下のような構成をとることも可能である。
(1)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される周波数位置(ドナー領域の中心72サブキャリヤ)の情報を取得する情報取得部と、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)を、前記所定の必須情報BCH、PSS、SSSが配置される周波数位置を避けて送信するバーチャル・キャリヤ送信制御部を具備する無線通信装置(Pico eNodeB又はMacro eNodeB)。
(2)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれている、上記(1)に記載の無線通信装置。
(3)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれていない、上記(1)に記載の無線通信装置。
(4)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される場所の情報を取得する情報取得部と、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)の運用を停止するバーチャル・キャリヤ運用部を具備する無線通信装置(Pico eNodeB又はMacro eNodeB)。
(5)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれている、上記(4)に記載の無線通信装置。
(6)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれていない、上記(4)に記載の無線通信装置。
(7)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される場所の情報を取得する情報取得部と、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうち制御情報PDCCH_MTCの送信を停止するバーチャル・キャリヤ運用部を具備する無線通信装置(Pico eNodeB又はMacro eNodeB)。
(8)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれている、上記(7)に記載の無線通信装置。
(9)隣接基地局Pico eNodeBがダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCが配置されている周波数帯の情報を取得する情報取得部と、前記隣接基地局Pico eNodeBがバーチャル・キャリヤの制御領域PDCCH_MTCを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するサブフレーム送信制御部を具備する無線通信装置。
(10)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれていない、上記(9)に記載の無線通信装置。
(11)隣接基地局Macro eNodeBが送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報Common Search Spaceが記載された帯域の情報を取得する情報取得部と、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、前記隣接基地局Macro eNodeBが前記制御情報Common Search Spaceを送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCを送信するバーチャル・キャリヤ送信制御部を具備する無線通信装置(Pico eNodeB)。
(12)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれていない、上記(11)に記載の無線通信装置。
(13)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される周波数位置(ドナー領域の中心72サブキャリヤ)の情報を取得するステップと、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)を、前記所定の必須情報BCH、PSS、SSSが配置される周波数位置を避けて送信するステップを有する無線通信方法。
(14)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される場所の情報を取得するステップと、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)の運用を停止するバーチャル・キャリヤ運用ステップを有する無線通信方法。
(15)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される場所の情報を取得するステップと、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちPDCCH_MTCの送信を停止するバーチャル・キャリヤ運用ステップを有する無線通信方法。
(16)隣接基地局Pico eNodeBがダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCが配置されている周波数帯の情報を取得するステップと、前記隣接基地局Pico eNodeBがバーチャル・キャリヤの制御領域PDCCH_MTCを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するステップを有する無線通信方法。
(17)隣接基地局Macro eNodeBが送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報Common Search Spaceが記載された帯域の情報を取得するステップと、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、前記隣接基地局Macro eNodeBが前記制御情報Common Search Spaceを送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCを送信するステップを有する無線通信方法。
(18)自セルのダウンリンクの所定の位置のサブフレームのデータ領域PDSCHの所定の周波数位置(ドナー領域の中心72サブキャリヤ)に所定の必須情報BCH、PSS、SSSを配置する第1の基地局Macro eNodeBと、
自セルのダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)を、前記所定の必須情報BCH、PSS、SSSが配置される周波数位置を避けて送信する第2の基地局Pico eNodeBと、
を具備する無線通信システム。
(19)自セルのダウンリンクの所定の位置のサブフレームのデータ領域PDSCHに所定の必須情報BCH、PSS、SSSを配置する第1の基地局Macro eNodeBと、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)の運用を停止する第2の基地局を具備する無線通信システム。
(20)自セルのダウンリンクの所定の位置のサブフレームのデータ領域PDSCHに所定の必須情報BCH、PSS、SSSを配置する第1の基地局Macro eNodeBと、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)のうちPDCCH_MTCの送信を停止する第2の基地局を具備する無線通信システム。
(21)自セルのダウンリンクのサブフレームのデータ領域PDSCHの所定の周波数帯で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを送信する第1の基地局Pico eNodeBと、前記第1の基地局がバーチャル・キャリヤの制御領域PDCCH_MTCを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信する第2の基地局Macro eNodeBを具備する無線通信システム。
(22)自セル内の全端末宛ての制御情報Common Search Spaceを含んだサブフレームを送信する第1の基地局Macro eNodeBと、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、前記第1の基地局Macro eNodeBが前記制御情報Common Search Spaceを送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCを送信する第2の基地局Pico eNodeBを具備する無線通信システム。
【産業上の利用可能性】
【0149】
以上、特定の実施形態を参照しながら、本明細書で開示する技術について詳細に説明してきた。しかしながら、本明細書で開示する技術の要旨を逸脱しない範囲で当業者が該実施形態の修正や代用を成し得ることは自明である。
【0150】
本明細書では、3GPPが策定したLTEに従うセルラー通信システムに適用した実施形態を中心に説明してきたが、本明細書で開示する技術の要旨はこれに限定されるものではない。サイズの異なるセルが階層化されたさまざまなセルラー通信システムに、本明細書で開示する技術を同様に適用することができる。
【0151】
要するに、例示という形態により本明細書で開示する技術について説明してきたのであり、本明細書の記載内容を限定的に解釈するべきではない。本明細書で開示する技術の要旨を判断するためには、特許請求の範囲を参酌すべきである。
【符号の説明】
【0152】
900…無線通信装置
901…RF通信処理部
902…ディジタル通信処理部
903…バーチャル・キャリヤ制御部
904…バーチャル・キャリヤ・サブフレーム位置決定部
905…Macro eNodeBサブフレーム番号特定部
906…Pico eNodeBサブフレーム番号特定部
1000…無線通信装置
1001…RF通信処理部
1002…ディジタル通信処理部
1003…バーチャル・キャリヤ・サブフレーム位置保持部
1200…無線通信装置
1201…RF通信処理部
1202…ディジタル通信処理部
1203…CCE挿入制御部
1204…Search Space決定部
1205…ハッシュ関数管理部
1206…干渉制御部
1207…Macro eNodeBサブフレーム番号特定部
1208…Pico eNodeBサブフレーム番号特定部
1209…オフセット情報取得部
1300…無線通信装置
1301…RF通信処理部
1302…ディジタル通信処理部
1303…Blind decoding部
1304…Search Space決定部
1305…ハッシュ関数管理部
【技術分野】
【0001】
本明細書で開示する技術は、サイズの異なるセルが階層化された無線通信環境下において基地局として動作する無線通信装置及び無線通信方法、並びに無線通信システムに係り、特に、サイズの異なるセルが階層化された無線通信環境下におけるセル間の干渉を抑制する無線通信装置及び無線通信方法、並びに無線通信システムに関する。
【背景技術】
【0002】
現在、3GPP(Third Generatoin Partnership Project)では、第4世代移動通信システムの標準化作業が行なわれている。3GPPが策定したデータ通信仕様の1つである「LTE(Long Term Evolution)」は、第4世代(4G)のIMT−Advancedを目指した長期的高度化システムであり、「3.9G(スーパー3G)」とも呼ばれる。
【0003】
LTEでは、FDD(Frequency Division Duplex)とTDD(Time Division Duplex)の2通りの複信方式を選択することができる。FDDでは、アップリンク専用の帯域とダウンリンク専用の帯域を用いる。アップリンク及びダウンリンクでは、それぞれ連続する10個のサブフレームで構成される無線フレームのフォーマットを使用する。ここで言うアップリンクとは、端末局(UE端末:User Equipment)からLTEの基地局(eNodeB:evolved Node B)への通信のことであり、ダウンリンクとは、eNodeBからUE端末への通信のことである。TDDでも、連続する10個のサブフレームで構成される無線フレームのフォーマットを使用する。但し、TDDでは、アップリンク及びダウンリンクで同一の帯域を用いて通信を行なう。無線フレームを構成する各サブフレームは、eNodeBからの制御信号PDCCH(Phy Downlink Control Channel)と、ユーザー・データとして使うPDSCH(Phy Downlink Shared Channel)からなる。
【0004】
また、LTEでは、1セル繰り返しで、1つの周波数をすべてのセルで共通に使用する運用が行なわれる。これは、従来のセルラーのように、隣接する基地局間で異なる周波数を使ってしまうと、周波数資源が足りなくなるためである。その場合には、セルの周辺にいるUE端末)の送受信する電波が干渉を起こすことが問題となる。そこで、3GPPのRel8であるLTEでは、Rel8のインターセル・インターフェアレンス・コーディネーション(ICIC:Inter Cell Interference Coordination)という技術が用いられる。
【0005】
ICICは、例えば、1セル周波数繰り返しと複数セル周波数繰り返しを組み合わせたフラクショナル周波数繰り返しにより実現することができる。図14には、フラクショナル周波数繰り返しを行なう3つのセル1〜3が隣接している様子を示している。同図において、6角形は1つのセル範囲を示している。フラクショナル周波数繰り返しでは、各セルは、eNodeBから近いセル内部の中央領域(セル内部の白抜きされた領域)と、eNodeBから離間したセル端の周辺領域(セル端の網掛けを施した領域)に分けられる。eNodeBと中央領域のUE端末との通信に割り当てられる「中央周波数」は、隣接セルと競合するが(すなわち、1セル周波数繰り返し)、eNodeBは中央領域内でしか信号が届かないような小さな送信電力に抑えることで、セル間の干渉を回避する。一方、eNodeBは、周辺領域に信号が届くには大きな電力で送信しなければならないが、隣接セルの周辺領域同士は互いに異なる「周辺周波数」を使用することによって(すなわち、複数セル周波数繰り返し)、セル間の干渉を回避する。図示の例では、例えば20MHzの帯域を3つの帯域に分割し、隣接セル間で周辺周波数が重ならないようにして繰り返し使用される。図14中では周波数帯の相違を網掛けの種類(斜線、縦縞線、横縞線)で表している。
【0006】
また、3GPPのRel8のICICでは、上記の周波数繰り返し技術の技術以外に、基地局すなわちeNodeB間でX2インターフェースを介して干渉を抑制するための信号をやり取りしている。X2インターフェースは、eNodeB間を接続しているインターフェースであり、光ファイバーなどの伝送媒体が代表的である。このX2インターフェース経由でやり取りするメッセージとして、具体的には、High Interference Indicator(HII)とOverload Indicator(OI)が定義されている。
【0007】
HIIは、セル・エッジのUE端末に対して割り当てたリソース・ブロックの場所を隣接するeNodeBに知らせるための情報である。HIIで指定されたリソース・ブロックからは、干渉を受ける可能性が高いと判断できる。したがって、隣接セルではそのことを考慮して、当該リソース・ブロックに対してスケジューリングを行なう。一方、OIは、アップリンクのリソース・ブロックの干渉の度合いを知らせるための情報であり、Low/Medium/Highの3つのレベルを持っている。隣接するeNodeBは、あるリソース・ブロックへの干渉の度合いがHighであるとX2インターフェース経由のOIで通知されると、当該リソース・ブロックへのスケジューリングやアップリンクの電力制御を調整する。
【0008】
このように3GPPのRel8のICICは、マクロセル間の干渉除去を目的として、X2インターフェース経由で調整する方法をとっている。しかしながら、この方法により調整できる箇所はサブフレームのうちPDSCHだけであり、PDCCHの部分に関しては調整できない。PDCCHは、隣接セル同士で同じ帯域を使い、干渉に強く作られているフォーマットだからである。
【0009】
続いて、3GPPのRel10のICICについて説明する。Rel10のICICは、マクロセルとピコセルの間の干渉の抑制を目的としている。
【0010】
3GPPでは、HetNetと呼ばれるMacro/Micro/Pico/Femtoなどさまざまなサイズのセルを階層化してシステム全体の容量を向上する方式が検討されている。例えばピコセルの基地局であるPico eNodeBは、マクロセルの基地局であるMacro eNodeBよりも送信出力が数十dBのオーダーで小さいという特徴を持つ。Macro eNodeBとPico eNodeBの間は、X2インターフェースが存在していると仮定できる(言い換えれば、サブフレームのうちPDSCHの部分についての干渉は、Rel8のICICにより解決済みである)。但し、Pico eNodeBとMacro eNodeB間のX2インターフェースは、Macro eNodeB間のX2インターフェースよりも速度や容量や遅延の特性が脆弱なイン-ターフェースを仮定する必要がある場合もある。
【0011】
Pico eNodeBからの送信電力は小電力であるので、Macro eNodeBからの信号が強く受信できるエリアが多くなる。Pico cellからの伝搬ロスがMacro eNodeBからの伝搬ロスよりも小さい領域(若しくは、Macro eNodeBよりもPico cellからの距離が近い領域)であっても、Macro eNodeBからの受信電力の方が大きいと、UE端末は、近隣のPico eNodeBではなく遠くのMacro eNodeBにRRC(Radio Resource)_Connectedを試みることが多くなる。しかしながら、UE端末の電池の消費から考えるとアップリンクは伝搬ロスの小さい基地局に接続した方が有利であることと、HetNetなど異種のセルの組み合わせからなるheterogeneous環境ではピコセルにUE端末を振り分けてセル分割ゲインを得ることが重要であることから、Macro eNodeBにばかりUE端末が接続されてしまうという問題を解決する必要がある。
【0012】
そこで、Rel10では、Range Expansionという技術が規定されている。図15を参照しながら、Range Expansionについて説明する。UE端末は、セル・セレクションすなわち参入する基地局を決定するときに、eNodeBからのリファレンス信号(Cell−speciffic reference signal)から得られる受信電力(RSRP:Reference Signal ReceivedPower)に基づいて、電力が大きいeNodeBに参入することを選択する。eNodeB毎のRSRPを評価するときに、Pico eNodeBのRSRPには例えば10dBのオフセットを追加して評価することにより、Pico eNodeBへ参入するUE端末が存在するエリアを拡大する。これがRange Expansionであり、拡大されたエリアのことをRange Expansion Areaと呼ぶ。Range Expansion Areaは、Pico eNodeBからのRSRPが低いため、本来ならばUE端末はMacro eNodeBに参入するところ、RSRPのオフセットすなわちRange Expanshionの技術により、Pico eNodeBに参入できるようになった領域である。
【0013】
Range Expanshion Areaに存在するUE端末にとって、参入したPico eNodeBからよりもMacro eNodeBからの受信電力の方が大きいことがある。すなわち、Range Expanshion Areaでは、UE端末のPico eNodeBからの受信はMacro eNodeBからの干渉に対して弱くなっているという欠点がある。Range Expanshion Areaでは、Pico eNodeBとMacro eNodeB間でダウンリンクの干渉が問題になる訳である。
【0014】
例えば、移動局装置とマクロセルを管理する基地局装置と、フェムトセルやピコセル、ナノセルホームセルを管理するホーム基地局装置を含む通信システムにおいて、ホーム基地局装置に対する干渉を調整する通信システムについて提案がなされている(例えば、特許文献1を参照のこと)。しかしながら、この通信システムは、Range Expansion AreaのUE端末へのダウンリンク時の干渉を調整するものではない。
【先行技術文献】
【特許文献】
【0015】
【特許文献1】特開2011−77964号公報
【発明の概要】
【発明が解決しようとする課題】
【0016】
本明細書で開示する技術の目的は、サイズの異なるセルが階層化された無線通信環境下において、セル間での干渉を好適に抑制することができる、優れた無線通信装置及び無線通信方法、並びに無線通信システムを提供することにある。
【0017】
本明細書で開示する技術のさらなる目的は、サイズの異なるセルが階層化された無線通信環境下において基地局として動作して、端末へのダウンリンク時のセル間干渉を好適に抑制することができる、優れた無線通信装置及び無線通信方法、並びに無線通信システムを提供することにある。
【課題を解決するための手段】
【0018】
本願は、上記課題を参酌してなされたものであり、請求項1に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される周波数位置の情報を取得する情報取得部と、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信するバーチャル・キャリヤ送信制御部と、
を具備する無線通信装置である。
【0019】
本願の請求項2に記載の技術によれば、請求項1に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれている。
【0020】
本願の請求項3に記載の技術によれば、請求項1に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれていない。
【0021】
また、本願の請求項4に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得する情報取得部と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止するバーチャル・キャリヤ運用部と、
を具備する無線通信装置である。
【0022】
本願の請求項5に記載の技術によれば、請求項4に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれている。
【0023】
本願の請求項6に記載の技術によれば、請求項4に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれていない。
【0024】
また、本願の請求項7に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得する情報取得部と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうち制御情報の送信を停止するバーチャル・キャリヤ運用部と、
を具備する無線通信装置である。
【0025】
本願の請求項8に記載の技術によれば、請求項7に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれている。
【0026】
また、本願の請求項9に記載の技術は、
隣接基地局がダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域が配置されている周波数帯の情報を取得する情報取得部と、
前記隣接基地局がバーチャル・キャリヤの制御領域を配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するサブフレーム送信制御部と、
を具備する無線通信装置である。
【0027】
本願の請求項10に記載の技術によれば、請求項9に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれている。
【0028】
また、本願の請求項11に記載の技術は、
隣接基地局Mが送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報が記載された帯域の情報を取得する情報取得部と、
自セルのダウンリンクのサブフレームのデータ領域で、前記隣接基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信するバーチャル・キャリヤ送信制御部と、
を具備する無線通信装置である。
【0029】
本願の請求項12に記載の技術によれば、請求項11に記載の無線通信装置は、隣接基地局との間でサブフレームの同期がとれていない。
【0030】
また、本願の請求項13に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される周波数位置の情報を取得するステップと、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信するステップと、
を有する無線通信方法である。
【0031】
また、本願の請求項14に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得するステップと、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止するバーチャル・キャリヤ運用ステップと、
を有する無線通信方法である。
【0032】
また、本願の請求項15に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得するステップと、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちの送信を停止するバーチャル・キャリヤ運用ステップと、
を有する無線通信方法である。
【0033】
また、本願の請求項16に記載の技術は、
隣接基地局がダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域が配置されている周波数帯の情報を取得するステップと、
前記隣接基地局がバーチャル・キャリヤの制御領域Cを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するステップと、
を有する無線通信方法である。
【0034】
また、本願の請求項17に記載の技術は、
隣接基地局が送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報が記載された帯域の情報を取得するステップと、
自セルのダウンリンクのサブフレームのデータ領域で、前記隣接基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信するステップと、
を有する無線通信方法である。
【0035】
また、本願の請求項18に記載の技術は、
自セルのダウンリンクの所定の位置のサブフレームのデータ領域の所定の周波数位置に所定の必須情報を配置する第1の基地局と、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信する第2の基地局と、
を具備する無線通信システムである。
【0036】
但し、ここで言う「システム」とは、複数の装置(又は特定の機能を実現する機能モジュール)が論理的に集合した物のことを言い、各装置や機能モジュールが単一の筐体内にあるか否かは特に問わない(以下、同様)。
【0037】
また、本願の請求項19に記載の技術は、
自セルのダウンリンクの所定の位置のサブフレームのデータ領域に所定の必須情報を配置する第1の基地局と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止する第2の基地局と、
を具備する無線通信システムである。
【0038】
また、本願の請求項20に記載の技術は、
自セルのダウンリンクの所定の位置のサブフレームのデータ領域に所定の必須情報を配置する第1の基地局と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちの送信を停止する第2の基地局と、
を具備する無線通信システムである。
【0039】
また、本願の請求項21に記載の技術は、
自セルのダウンリンクのサブフレームのデータ領域の所定の周波数帯で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを送信する第1の基地局と、
前記第1の基地局がバーチャル・キャリヤの制御領域を配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信する第2の基地局と、
を具備する無線通信システムである。
【0040】
また、本願の請求項22に記載の技術は、
自セル内の全端末宛ての制御情報を含んだサブフレームを送信する第1の基地局と、
自セルのダウンリンクのサブフレームのデータ領域で、前記第1の基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信する第2の基地局と、
を具備する無線通信システムである。
【発明の効果】
【0041】
本明細書で開示する技術によれば、サイズの異なるセルが階層化された無線通信環境下において基地局として動作して、Range Expansion Areaの端末へのダウンリンク時のセル間干渉を好適に抑制することができる、優れた無線通信装置及び無線通信方法、並びに無線通信システムを提供することができる。
【0042】
本明細書で開示する技術によれば、Macro eNodeBとPico eNodeBの間で干渉問題を効率よく解決することができるので、各セルのスループットを向上させることができる。
【0043】
本明細書で開示する技術によれば、MTCで使用されるバーチャル・キャリヤを、HetNetなど異種のセルの組み合わせからなるheterogeneous環境下で好適に運用することができる。
【0044】
本明細書で開示する技術のさらに他の目的、特徴や利点は、後述する実施形態や添付する図面に基づくより詳細な説明によって明らかになるであろう。
【図面の簡単な説明】
【0045】
【図1】図1は、狭帯域運用の制御領域PDCCH_MTCとデータ領域PDSCH_MTCがドナー帯域のデータ領域PDSCHに配置される様子を示した図である。
【図2】図2は、Pico eNodeBのPDCCH_MTCがMacro eNodeBのPSS、SSSと重なるケースを例示した図である。
【図3】図3は、バーチャル・キャリヤが使用する狭帯域を、ドナー帯域の中心72サブキャリヤを避けて配置した様子を示している。
【図4】図4は、BCH、PSS、SSSが存在するサブフレームにおいてバーチャル・キャリヤの制御領域PDCCH_MTCを停止する様子を示した図である。
【図5】図5は、Macro eNodeBのPDCCHと、Pico eNodeBのPDCCH_MTCの位置が重なっている様子を示した図である。
【図6】図6は、Macro eNodeB側の制御領域PDCCHのUE Specific Search Spaceを、Pico eNodeB側の制御領域PDCCH_MTCで使用する中心の72サブキャリヤを除いて指定した様子を示した図である。
【図7】図7は、バーチャル・キャリヤの制御領域PDCCH_MTCを、PDCCHのCommon Search Spaceを避けて配置する様子を示した図である。
【図8】図8は、バーチャル・キャリヤの制御領域PDCCH_MTCを、PDCCHのCommon Search Spaceを避けて配置する様子を示した図である。
【図9】図9は、Pico eNodeBとして動作する無線通信装置900の構成例を模式的に示した図である。
【図10】図10は、図9に示したPico eNodeBに属するUE端末として動作する無線通信装置1000の構成例を模式的に示した図である。
【図11】図11は、ピコセル内でバーチャル・キャリヤを運用するための処理手順を示したフローチャートである。
【図12】図12は、Macro eNodeBとして動作する無線通信装置1200の構成例を模式的に示した図である。
【図13】図13は、図12に示したMacro eNodeBに属するUE端末として動作する無線通信装置1300の構成例を模式的に示した図である。
【図14】図14は、フラクショナル周波数繰り返しを行なう3つのセル1〜3が隣接している様子を示した図である。
【図15】図15は、3GPPのRel10で規定されるRange Expansionを説明するための図である。
【図16】図16は、LTEのダウンリンクの無線フレーム構成を示した図である。
【図17】図17は、FDDのダウンリンクのサブフレームに同期信号PSS、SSSが挿入される場所を示した図である。
【図18】図18は、TDDのダウンリンクのサブフレームに同期信号PSS、SSSが挿入される場所を示した図である。
【図19】図19は、ダウンリンクのサブフレームにシステム・インフォメーションBCHが挿入される場所を示した図である。
【図20】図20は、通常のサブフレームの構造を例示した図である。
【図21】図21は、通常のABSが設定されたサブフレームの構造を例示した図である。
【図22】図22は、MBSFN型のABSが設定されたサブフレームの構造を例示した図である。
【図23】図23は、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつけた例を示した図である。
【図24】図24は、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつけない例を示した図である。
【発明を実施するための形態】
【0046】
以下、図面を参照しながら本明細書で開示する技術の実施形態について詳細に説明する。
【0047】
LTEでは、OFDM変調方式を基本とした通信方式であり、また、ダウンリンクの無線アクセス方式にはOFDMAが採用されている。図16には、LTEのダウンリンクの無線フレーム構成を示している。図示のように、無線フレームは、時間単位の短い順に、タイムスロット(Slot)、サブフレーム(Subframe)、無線フレーム(Radio Frame)の3層に階層化されている。
【0048】
0.5ミリ秒長のタイムスロットは、7個のOFDMシンボルで構成され(但し、通常のユニキャスト伝送の場合)、ユーザー(移動局)側で受信する際の復調処理の単位となる。1ミリ秒長のサブフレームは、連続する2個のタイムスロット(14OFDMシンボル)で構成され、訂正符号化された1データ・パケットの送信時間単位となる。10ミリ秒長の無線フレームは、連続する10個のサブフレーム(すなわち、20個のタイムスロット)で構成され、すべての物理チャネルの多重に対する基本単位となる。サブフレームは、eNodeBからの制御信号として使う制御領域PDCCHと、ユーザー・データとして使うデータ領域PDSCHの部分に分けられる。
【0049】
各ユーザーは、異なるサブキャリヤ、又は、異なるタイムスロットを使用すれば、互いに干渉することなく通信することができる。LTEでは、連続するサブキャリヤをブロック化して、「リソース・ブロック(RB)」と呼ばれる、無線リソース割り当ての最小単位が定義される。基地局に搭載されているスケジューラーは、各ユーザーに対して、リソース・ブロック単位で無線リソースが割り当てる。リソース・ブロックは、12サブキャリヤ×1タイムスロット(7OFDMシンボル=0.5ミリ秒)からなる。また、サブフレームの先頭から最大3OFDMシンボルが、コントロール・チャネルすなわちPDCCHに使用される。基地局のスケジューラーは、サブフレーム毎すなわち1ミリ秒間隔で、リソース・ブロックの割り当てを行なうことができる。リソース・ブロックの位置情報をスケジューリングと呼ぶ。アップリンクのスケジューリング情報及びダウンリンクのスケジューリング情報は、ともにダウンリンクのコントロール・チャネル内に記載される。各ユーザーは、コントロール・チャネルを見て、自分に割り当てられたリソース・ブロックを認識することができる。
【0050】
0.5ミリ長のタイムスロットは、各ユーザーが使用できる割り当ての最小単位である。基地局(eNodeB)に搭載されているスケジューラーは、ユーザー毎にタイムスロット単位で使用してもよいタイムスロットを割り当てる。LTEでは、FDDとTDDの2通りの通信方式を選択することができる。TDDの場合には、1サブフレーム毎にアップリンク又はダウンリンクのいずれに使用するかを選択することができる。
【0051】
図16に示したように、ダウンリンクの無線フレームは10個の連続するサブフレームからなるが、所定位置に同期信号とシステム・インフォメーションがそれぞれ挿入される。
【0052】
同期信号は、PSS(Primary Synchronization Signal)とSSS(Secondary Synchronization Signal)の2種類がある。同期信号が挿入されるサブフレーム及びOFDMシンボルの位置は、Duplex modeがFDDの場合とTDDの場合で異なる。FDDの場合、図17に示すように、PSSとSSSはともにサブフレーム#0と#5に挿入される。1スロット目の最後のOFDMシンボルにPSS、その手前のOFDMシンボルにSSSがそれぞれ挿入される。また、TDDの場合には、図18に示すように、PSSはサブフレーム#1と#6の1スロット目の先頭から6OFDMシンボルの位置に挿入され、SSSはサブフレーム#0と#5の2スロット目の最後のOFDMに挿入される。どちらの場合も、使用する帯域の中心の72サブキャリヤが用いられる。これら同期信号PSS、SSSは、UE端末が最初に受信する信号なので、すべてのダウンリンクの信号の中で最も重要な信号ということができる。この信号を受信できない場合は、UE端末は、セルに参入するための後のステップを実行することができない。
【0053】
また、システム・インフォメーションには、MIB(Master Information Block)とSIB(System Information Block)が存在する。MIBには、使用するバンド幅、System Frame Number、Hybrid ACKのコンフィギュレーションといった、最初の段階でデータを受信するために必須の情報が格納される。SIBは、その他のシステム情報であって重要な情報であるが、MIBの方がより重要な情報である。MIBは、BCH(Broadcast CHannel)というチャネルで送信される。また、SIBは、PDSCHで送られると規定されている。Duplex modeがFDDの場合とTDDの場合ともに、図19に示すように、BCHはサブフレーム#0の2スロット目の先頭から4OFDMシンボルに挿入され、周波数帯域の中で中心の72サブキャリヤが用いられる。このBCHの領域は非常に重要なので、BCHへの干渉を抑制することが非常に重要である。
【0054】
ここで、3GPPのRel10で規定されているRange Expansion AreaにおけるPico eNodeBとMacro eNodeB間でダウンリンクの干渉問題について、[背景技術]の欄に引き続いて考察する。
【0055】
上述したように、Range Expanshion AreaにいるUE端末にとって、参入したPico eNodeBからよりもMacro eNodeBからの受信電力の方が大きいことがある。すなわち、Range Expanshion Areaでは、UE端末の受信はMacro eNodeBからの干渉に弱くなっているという欠点がある。
【0056】
また、上述したように、Macro eNodeBとPico eNodeBの間は、X2インターフェースが存在していると仮定できることから、サブフレームのうちPDSCHの部分についての干渉は、Rel8のICICにより解決済みである。ところが、Range Expanshion Areaでは、PDSCHの部分についてはRel8のICIC技術を用いて調整を行なったとしても、PDCCHの部分の干渉が問題になってくる。
【0057】
Rel8では、PDCCHは、同程度の送信出力を持つMacro eNodeB同士の干渉に耐えられるように設計されている。ところが、Rel10では、Range ExpanshionによりRSRPが評価されるために、Macro eNodeBからはPico eNodeBよりも数10dBの大電力で送信されることになり、Pico eNodeBから送信されるPDCCHは、Macro eNodeBから送信されるPDCCHにより干渉受け易くなるという問題がある。特にRange Expansion Areaに存在するUE端末は、Pico eNodeBからのPDCCHを受信することができなくなってしまう。
【0058】
このため、Rel10のICICは、マクロセルとピコセルの間の干渉の抑制を目的としている。Rel10のICICでは、Macro eNodeBが送信する無線フレーム中の10個のサブフレームのうち、出力を停止するサブフレームをいくつか設けるという解決方法をとっている。このように出力を停止するサブフレームは、ABS(Almost BlankSubframe)と呼ばれる。
【0059】
図20には、通常のサブフレームの構造を例示している。同図において、横軸は時間、縦軸は周波数とする。サブフレームは、eNodeBからの制御信号PDCCHと、ユーザー・データとして使うPDSCHからなる(前述)。図示の例では、先頭から3つ目までのOFDMシンボルがPDCCHであり、4つ目以降のOFDMシンボルがPDSCHである。また、PDCCH並びにPDSCHの双方にそれぞれ、CRS(Cell−Specific Reference Signal)と呼ばれる信号が挿入されている。図20中、黒で塗り潰したリソース・ブロック部分がCRSの信号に相当する。通常のダウンロードのサブフレームの信号を停止しようとしても、PDSCHの部分のデータ部分のみ停止可能である。PDSCH部分の停止は、基地局(eNodeBのスケジューラーがPDSCHへの割り当てを停止することにより実現できる。しかしながら、基地局(eNodeBは、PDSCHのCRSを停止することはできない。同様に、基地局(eNodeBは、PDCCHのCell Specific Reference Signalも停止することはできない。すなわち、ABSが設定されても、通常のサブフレームであれば、CRSを挿入しなければならない。図21には、通常のABSが設定されたサブフレームの構造を例示しているが、CRSの信号が挿入されていないリソース・ブロック部分しか停止することはできない。
【0060】
3GPPのRel10では、PDSCHのCRSまで停止するために、ABSのサブフレームをMBSFN(Multimedia Broadband Single Frequency Network)のサブフレームに設定することが行なわれている。MBSFNのサブフレームは、SFNを用いて放送用に用いられるサブフレームであり、通常のCRSを送信しない。UE端末はMBSFNサブフレームであると認識すると、PDSCHのCRSを受信しなくてもよいという特徴がある。UE端末に対して通常のABSのサブフレームをMBSFNのように装うことで、PDSCHのCRSを停止することができる。但し、MBSFNのサブフレームにおいても、PDCCHのCRSまで停止することはできない。図22には、MBSFN型のABSが設定されたサブフレームの構造を例示しているが、PDCCHのCRSは停止されない。
【0061】
要するに、Rel10では、ABSとして、通常のABSとMBSFN型のABSの2種類が存在する。通常のABSのサブフレームは、図21に示すように、PDCCHとPDSCHのCRSだけは残り、その他のリソース・ブロック部分は無送信となる。また、MBSFN型のABSのサブフレームは、図22に示すように、PDCCHのCRSだけは残り、その他の部分は無送信となる。図21及び図22中、黒で塗り潰したリソース・ブロック部分がCRSの信号に相当し、白抜きのリソース・ブロック部分は無送信に相当する。
【0062】
上述したように、Range Expanshion Areaでは、UE端末のPico eNodeBからの受信はMacro eNodeBからの干渉に対して弱くなっている。一方、図21、図22に示すように、ABSが設定されたサブフレームは大部分が無送信となるから、Macro eNodeBでABSが設定されたサブフレームに対応するPico eNodeBのサブフレームは干渉に強い。したがって、Pico eNodeBは、Macro eNodeBでABSが設定されたサブフレームに、Range Expansion AreaのUE端末に対するリソースを多く割り当てると、干渉を回避して効率よくダウンリンクの通信を行なうことができる。
【0063】
Macro eNodeBとPico eNodeBのサブフレームには、オフセットをつける運用とオフセットをつけない運用が考えられる。図23には、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつけた場合の一例を示している。図示の例では、時間方向に7サブフレームプンだけオフセットが付けられている。また、図24には、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつけない場合の一例を示している。
【0064】
図18〜図20を参照しながら既に説明したように、無線フレーム中の特定のサブフレーム位置に、干渉を抑制することが非常に重要な同期信号PSS、SSSとシステム・インフォメーションBCHが挿入されている。eNodeBは、これらの信号の送信を停止する訳にはいかない。図24に示したようにサブフレームにオフセットをつけないと、同期信号PSS、SSSやシステム・インフォメーションBCHが挿入されたサブフレームの位置がMacro eNodeBとPico eNodeBで揃ってしまい、Macro eNodeBがABSを設定して衝突を回避することはできない。
【0065】
一方、図23に示したようにサブフレームにオフセットをつける運用では、同期信号PSS、SSSやシステム・インフォメーションBCHが挿入されたサブフレームの位置がMacro eNodeBとPico eNodeBで揃わない。例えばPico eNodeBは、Macro eNodeBがABSを設定したサブフレームで同期信号PSS、SSSやシステム・インフォメーションBCHを送れるよう、オフセットをつければよい。したがって、eNodeB間での同期信号PSS、SSSやシステム・インフォメーションBCHの信号の干渉を考慮すると、Macro eNodeBとPico eNodeBのサブフレームにオフセットをつける運用が一般的になってくると思料される。
【0066】
付言すると、ABSを設定したサブフレームでは、PDCCHとPDSCHの両方の送信をほとんど停止してしまう。サブフレームのうちPDSCHの部分についての干渉は、上述したようにRel8のICICにより解決済みである。それにも拘らず、ABSでPDSCHまで送信を停止してしまうのは、PDCCHの中には各UE端末がどこのリソース・ブロックで受信を行なうかというスケジューリング情報が含まれているためであり、PDCCHだけを停止してPDSCHは送信するということはできないからである。
【0067】
ここで、PDCCHのデコーディング方法について説明しておく。
【0068】
PDCCHの送信は、CCE(Control Channel Element)と呼ばれる36シンボルからなるResource Elementを単位として行なわれる。PDCCHはQPSK(Quadrature Phase Shift Keying)で変調されるので、CCEの1単位で72ビットの情報を送信することができる。CCEにはAggregationすなわち同じ情報の繰り返し送信が適用される。繰り返し回数すなわちCCE Aggregation Levelとして、1、2、4、8の値をとることができる。CCE Aggregation Levelが上がるとSNが向上することは自明である。セル半径が大きくなるとSNの低下を防ぐために、CCE Aggregation Levelが上がる。
【0069】
UE端末は、自分宛てのCCEの場所を認識できないときには、Blind Decoding、すなわち取り敢えずデコードしてみる。そして、CRC(Cyclic Redundancy Check)エラーが発生しなかったら、UE端末は自分宛てのCCEと認識する。eNodeBでは、UE端末固有の番号(UE identity=C−RNTI(Cell Radio Network Temporary Identity)を用いて各CCEにCRCを付与しているので、対応するUE端末以外はCCEをCRCチェックするとエラーになるはずである。
【0070】
上記のBlind Decodingは、サブフレームの制御領域PDCCHに挿入されているすべてのCCEをデコードすることになり、UE端末にとって負荷が大きくなる。そこで、Rel8ではSearch Spaceというものが導入されている。Search Spaceは、Common Search SpaceとUE Specific Search Spaceに分かれている。前者のCommon Search Spaceは、CCEの候補の先頭から連続的に配置される。Common Search Spaceは、CCE Aggregation Level=4、8のときにしか存在しない(言い換えれば、セル半径が大きいときしかCommon Search Spaceは存在しない)。また、Common Search Spaceの領域は、16CCEを必要としている。1CCEは36シンボルなので、1OFDMシンボル目の周波数が低い方から576サブキャリヤがCommon Search Spaceになる。
【0071】
UE Specific Search Spaceの中にあるCCEは、UE identityでCRCをマスクしてエンコードされている。したがって、UE端末は、UE Specific Search Spaceの中をBlind Decoding、すなわち自分のUE identiyを用いてCRCチェックを行ない、CRCにエラーがなければ自分宛てのCCEであることを知ることができる。また、Common Search Spaceは、すべてのUE端末がUE identityとCommon identityという2つのidentityでBlind decodingを試みるしくみになっている。
【0072】
eNodeBとUE端末で、UE Specific Search Spaceの場所を決めるための共通の関数(ハッシュ関数)を持っている。この関数にUE identityとサブフレーム番号を入力すると、関数の出力として、当該サブフレームのUE Specific Search Space内でのSearch Space、すなわちUE端末がCCEをデコードすべき場所を得ることができる。ハッシュ関数は、入力に対してランダムに見える出力値を出す関数である(周知)。ハッシュ関数にUE identityとサブフレーム番号を入力すると一定の範囲内でランダムに見える領域が出力される。したがって、UE identity又はサブフレームが異なれば、ほとんどの場合はハッシュ関数から異なるSearch Spaceが出力される。この関数の計算で2以上のUE端末のSearch Spaceが偶然ぶつかってしまった場合でも、次のサブフレームではぶつからない可能性が高くなっている。
【0073】
LTEでは、1.4MHzから20MHzまで6種類のバンド幅を選択することができる。各バンド幅におけるサブキャリヤ数を以下の表1に示す。
【0074】
【表1】
【0075】
各バンド幅において、1OFDMシンボルに入るCCEの数は、サブキャリヤ数を36で割った値に相当する。したがって、バンド幅が20MHzの場合、1OFDMシンボルに入るCCEは、上記の表1から、1201/36≒約33個であることが分かる。
【0076】
ところで、通信ネットワークの利用は、従来の携帯電話やPC(Personal Computer)のような人が直接利用する通常の端末以外にも、広がりを見せている。以降では、このような人が直接利用しない、機械と機械の間の通信のことをMTC(Machine Type Communication)と呼び、人が直接通信に利用しない端末のことをMTC端末と呼ぶことにする。MTCは、一般的に、M2M(machine to Machine)と呼ばれる技術と同義である。この反対語として、H2H(Human to Human)がある。
【0077】
MTC端末は、主として、サーバーとの間で、人間を介在しないで通信を行なう。例えば、医療系のアプリケーションとして、医療情報のサーバーへの送信が挙げられる。すなわち、人間の心電図を収集して、あるトリガー条件になったときに、収集した情報をサーバー側へアップリンクを使用して送信する。別のアプリケーションとして、自動販売機が挙げられる。サーバー側から管理している自動販売機に対して、一定周期(例えば30日)毎に売上を報告させることができる。
【0078】
MTCの特徴として、例えば以下のものが挙げられる。
【0079】
(1)移動がほとんどない。
(2)小容量のデータ転送。
(3)超低消費電力。
(4)各MTC端末をグルーピングしてハンドリング。
【0080】
上記の特徴は一般的なものであるが、MTCが上記の特徴をすべて持っている必要はない。どのような組み合わせで上記の特徴を有しているかは、アプリケーションに依存する。また、さまざまな特徴のMTCが存在することにも留意する必要がある。
【0081】
MTCは、通常の音声端末と異なり、人間が介在しない機器に取り付けられることが想定されている。したがって、将来的には、携帯電話端末よりも多い台数のMTC端末が市場に出回ることが予想されている。
【0082】
MTC端末の台数が多くなると、一斉に基地局に対して送受信要求を行なうことにより、基地局やコア・ネットワークが輻輳を起こすことが懸念されている。また、MTC端末の普及を促進するためには、コストを低減することが求められている。さらに、MTC端末が従来の携帯電話端末と共存できる必要がある。MTC端末のみのセルラー・ネットワークを新たに構築することは、コスト上考えられない。
【0083】
MTC端末のコストを削減する方法の1つとして、MTC端末が扱う周波数帯域を狭帯域にすることが挙げられる。これを、「バーチャル・キャリヤ」若しくは「狭帯域オペレーション」と呼ぶ。LTEでは、最大で20MHzのバンド幅を持つことが可能である(最大のバンド幅を、「ドナー帯域」と呼ぶ)。狭帯域オペレーションは、MTC端末の扱う帯域を例えば1.4MHzに制限する方法である。従来のLTE端末では、中心の1.4MHzを扱うCategory1のLTE端末が規定されているが、これは、中心周波数の1.4MHzだけを扱うものである。これに対し、狭帯域オペレーションでは、20MHzのバンド幅の中で、任意の1.4MHzを扱うような運用である。
【0084】
狭帯域オペレーションの場合には、制御信号であるPDCCHは、従来のPDSCHの領域の中に含まれると考えるのが一般的である。これは、MTCの狭帯域オペレーションと従来のLTEの規格との共存を考えると、従来のPDCCHの領域の中に、MTCの狭帯域運用時のPDCCHを入れ難いことが挙げられる。また、MTCは、端末の数が多くなることから、従来のPDCCHのリソースが枯渇するという問題もある。したがって、MTCのPDCCHは、PDSCHの領域の中に入れられると考えるのが自然である。以下では、このMTCの制御領域PDCCHのことをPDCCH_MTCと呼ぶことにする。また、MTCのデータ領域PDSCHのことをPDSCH_MTCと呼ぶことにする。
【0085】
Macro eNodeBとPico eNodeBの間の干渉問題は、eNodeB間で同期が完全な場合と完全でない場合、バーチャル・キャリヤが干渉を与える場合と干渉を受ける場合、に場合分けすることができる。
【0086】
課題1:BCH、PSS、SSSからPDCCH_MTCへの干渉
まず、Macro eNodeBとPico eNodeBの間で同期が完全な場合(サブフレーム単位でのオフセットは持っているが(図23を参照のこと)、OFDMシンボル単位では時間差がない場合)における、バーチャル・キャリヤの干渉問題について考察する。
【0087】
上述したように、MTCは、端末のコストを削減するために、狭帯域の運用(バーチャル・キャリヤ・オペレーション)が予想される。この狭帯域の運用では、eNodeBのドナー帯域20MHzの中で任意の狭帯域が選ばれると考える。図1に示すように、狭帯域運用すなわちバーチャル・キャリヤの制御領域PDCCH_MTCとデータ領域PDSCH_MTCは、ともにドナー帯域のデータ領域PDSCHに配置される。何故ならば、MTCは、狭帯域の幅しか受信できないため、ドナー帯域のPDCCHをすべて受信しデコードすることはできないからである。
【0088】
ここでは、PDCCH_MTCとPDSCH_MTCで構成されるバーチャル・キャリヤは、Pico eNodeB(小電力送信のノード)から送信されているキャリヤ(すなわち、バーチャル・キャリヤが被干渉の立場となること)を想定する。
【0089】
Macro eNodeBが送信する所定のサブフレームのPDSCHには、ドナー帯域の中心の72サブキャリヤに位置に、システム・インフォメーションBCHや同期信号PSS、SSSが挿入されている(図17〜図19を参照のこと)。これらの信号とPico eNodeBから送信されるPDCCH_MTCとの干渉を回避することが、MTCの狭帯域オペレーションを実現する上で1つの技術的課題となる。通常は、サブフレームのうちPDSCHについては、Rel8のICICで用意されているX2インターフェース経由で、干渉している箇所を調整することができる(前述)。しかしながら、BCH、PSS、SSSは重要な情報であるので、Macro eNodeBはこれらの送信を停止することはできない。一方、干渉を受けるPDCCH_MTCは、MTCにとっての制御情報が挿入されているので、この部分が干渉を受けると、PDSCH_MTCの送受信ができなくなってしまうという問題がある。
【0090】
この問題は、Macro eNodeBのBCH、PSS、SSSがPico eNodeBのバーチャル・キャリヤに与える影響を問題にしていることを再確認したい。Macro eNodeBの中のバーチャル・キャリヤの場合は、当然、Macro eNodeBのBCH及びPSS、SSSと同じ場所を避けてバーチャル・キャリヤを送信するので問題ない。
【0091】
また、Macro eNodeBとPico eNodeBの間であっても、Macro eNodeBのBCH、PSS、SSSの位置は、Pico eNodeBのBCH、PSS、SSSの位置と同じ場合は、Pico eNodeBのPDCCH_MTCは、Pico eNodeBのBCH、PSS、SSSの位置を避けて配置されるので、結果として、Macro eNodeBのBCH、PSS、SSSと重ならないのでは、という疑問が起きるかもしれない。
【0092】
しかしながら、この疑問は間違いである。Rel10のICICでは、図23に示したように、Macro eNodeBのサブフレームとPico eNodeBのサブフレームにオフセットをつけて運用することが考えられている。この場合、サブフレームの境界は同じで(OFDMシンボル単位で)同期していると言えるが、オフセットを持っているために、Macro eNodeBのBCH、PSS、SSSとPico eNodeBのBCH、PSS、SSSの位置は異なることになる。したがって、Pico eNodeBのPDCCH_MTCがMacro eNodeBのBCH、PSS、SSSと重なるケースは存在する。図2には、Pico eNodeBのPDCCH_MTCがMacro eNodeBのサブフレーム#0、#5のPDSCHに挿入されているPSS、SSSと重なる様子を示している。このような場合には、Macro eNodeBのBCH、PSS、SSSは、Rel8のICICを利用して送信を停止する(X2インターフェース経由で干渉を調整する)ということは不可能であるので、Pico eNodeBのPDCCH_MTCに大きな干渉を与える。PDSCH_MTCへの干渉はRel8のICICで回避可能であるが、PDCCH_MTCへの干渉が深刻である。
【0093】
手段1−1:バーチャル・キャリヤをドナー帯域の中心72サブキャリヤの位置を避けて配置する干渉回避方法を提案する。
【0094】
図3には、バーチャル・キャリヤが使用する狭帯域を、ドナー帯域の中心72サブキャリヤを避けて配置した様子を示している。この手段を用いれば、PDCCH_MTCは、BCH、PSS、SSSと周波数的に同じ場所になることはないので、BCH、PSS、SSSからPDCCH_MTCへの干渉を好適に回避することができる。図3は、Macro eNodeBとPico eNodeBの間で同期が完全な場合(サブフレーム単位でのオフセットは持っているが、隣接するサブフレーム同士でOFDMシンボル単位では時間差がない場合)にこの手段を適用した例を示しているが、勿論、同期が完全でない場合にも同様にこの手段を適用することができる。また、図3には、Pico eNodeB側でバーチャル・キャリヤが運用されている例を示したが、バーチャル・キャリヤがMacro eNodeBで運用されている場合であっても、この手段を適用することができる。
【0095】
Pico eNodeBは、X2インターフェース、S−GW(Serving Gateway)、並びにMME(Mobility Management Entity)経由で、Macro eNodeBと通信して、Macro eNodeB側で、制御信号BCHや同期信号PSS、SSSを挿入するサブフレームの位置を把握する。そして、Pico eNodeBは、Macro eNodeB側で制御信号BCHや同期信号PSS、SSSを挿入したサブフレームと重なる自セルのサブフレームでは、BCH、PSS、SSSが配置されるドナー領域の中心72サブキャリヤを避けて、バーチャル・キャリヤを送信するようにする。
【0096】
手段1−2:バーチャル・キャリヤの運用を特定のサブフレームで停止することによる干渉回避方法を提案する。
【0097】
バーチャル・キャリヤによる狭帯域の運用をドナー帯域中心の72サブキャリヤ内に配置した場合、BCH、PSS、SSSが存在するサブフレームでは、運用を停止する。BCH、PSS、SSSが存在するサブフレームは、FDDのダウンリンクとTDDのダウンリンクとで相違する(図17〜図19を参照のこと)。以下では、FDDとTDDに分けて説明する。
【0098】
FDDの場合には、Macro eNodeBの#0、#5のサブフレームに対応するPico eNodeBの中心の72サブキャリヤに配置されているバーチャル・キャリヤの運用を停止する。また、TDDの場合には、Macro eNodeBの#0、#1、#5、#6のサブフレームに対応するPico eNodeBの中心の72サブキャリヤに配置されているバーチャル・キャリヤの運用を停止する。
【0099】
この手段は、Macro eNodeBとPico eNodeBの間で同期が完全である場合にも、完全でない場合にも適用することができる。また、バーチャル・キャリヤがMacro eNodeBで運用されている場合、及び、Pico eNodeBで運用されている場合の両方で、この手段を適用することができる。
【0100】
Pico eNodeBは、X2インターフェース、S−GW、並びにMME経由で、Macro eNodeBと通信して、Macro eNodeB側で、制御信号BCHや同期信号PSS、SSSを挿入するサブフレームの位置を把握する。そして、Pico eNodeBは、Macro eNodeB側で制御信号BCHや同期信号PSS、SSSを挿入したサブフレームと重なる自セルのサブフレームでは、バーチャル・キャリヤの運用を停止する。
【0101】
手段1−3:バーチャル・キャリヤの制御領域PDCCH_MTCを特定のサブフレームを避けて停止することによる干渉回避方法を提案する。
【0102】
BCH、PSS、SSSが存在するサブフレームと重なるサブフレームでは、PDCCH_MTCを送信しない。但し、手段1−2では、BCH、PSS、SSSが存在するサブフレームでバーチャル・キャリヤ全体の運用を停止するのに対し、手段1−3では、制御領域PDCCH_MTCの送信を停止するがデータ領域PDSCH_MTCの運用は行なう点で相違する。図4には、Macro eNodeBとPico eNodeBの間で同期が完全な場合(サブフレーム単位でのオフセットは持っているが、隣接するサブフレーム同士でOFDMシンボル単位では時間差がない場合)にこの手段を適用した例を示している。また、図4に示した例では、Pico eNodeB側でバーチャル・キャリヤが運用されており、Macro eNodeB側のBCH、PSS、SSSが存在するサブフレームにおいて、Pico eNodeBは、バーチャル・キャリヤの制御領域PDCCH_MTCを停止している。勿論、バーチャル・キャリヤがMacro eNodeBで運用されている場合であっても、この手段を適用することができる。ここで、PDSCH_MTCとBCH、PSS、SSSとの干渉は、Rel8のICICにより回避する(X2インターフェース経由で干渉を調整する)。通常は、Pico eNodeBからのPDSCH_MTCの送信を抑制する方法で、BCH、PSS、SSSとの干渉の抑制を行なう。
【0103】
Pico eNodeBは、X2インターフェース、S−GW、並びにMME経由で、Macro eNodeBと通信して、Macro eNodeB側で、制御信号BCHや同期信号PSS、SSSを挿入するサブフレームの位置を把握する。そして、Pico eNodeBは、Macro eNodeB側で制御信号BCHや同期信号PSS、SSSを挿入したサブフレームと重なる自セルのサブフレームでは、バーチャル・キャリヤのうち制御領域PDCCH_MTCの送信を停止する。
【0104】
図9には、上記の各手段1−1、1−2、1−3を実現するPico eNodeBとして動作する無線通信装置900の構成例を模式的に示している。
【0105】
無線通信装置900は、アンテナで送受信する無線信号のアナログ処理を行なうRF通信処理部901と、ディジタル送信信号の変調並びにディジタル受信信号の復調処理を行なうディジタル通信処理部902を備えている。ディジタル通信処理部902は、自装置900の通信レイヤーの上位層プロトコルとの間で送受信データをやり取りする。また、ディジタル通信処理部902は、X2インターフェース、S−GW、並びにMME経由で他のeNodeBと通信する。
【0106】
Macro eNodeBサブフレーム番号特定部905は、自分のピコセル(Range Expansion Area)を包含するマクロセルのMacro eNodeB側のサブフレーム番号を特定する。また、Pico eNodeBサブフレーム番号特定部906は、自分のピコセルのサブフレーム番号を特定する。
【0107】
バーチャル・キャリヤ・サブフレーム位置決定部904は、Macro eNodeB側のサブフレーム番号と自分のピコセルのサブフレーム番号に基づいて、バーチャル・キャリヤを送信するサブフレームの位置を決定する。ここで決定したサブフレームの位置は、例えばBCH信号を用いてピコセル内のUE端末(MTC端末)に通知される。
【0108】
バーチャル・キャリヤ制御部903は、バーチャル・キャリヤ・サブフレーム位置決定部904による決定結果に基づいて、バーチャル・キャリヤの運用を制御する。なお、手段1−1においては、バーチャル・キャリヤ・サブフレーム位置決定部904は、Macro eNodeB側の現在のサブフレーム番号がBCH、PSS、SSSなどの信号を含むサブフレームであることを示す場合には、ドナー帯域の中心72サブキャリヤを避けた周波数位置を決定する。また、手段1−2においては、バーチャル・キャリヤ・サブフレーム位置決定部904は、Macro eNodeB側の現在のサブフレーム番号がBCH、PSS、SSSなどの信号を含むサブフレームであることを示す場合には、バーチャル・キャリヤの運用停止を決定する。また、手段1−3においては、バーチャル・キャリヤ・サブフレーム位置決定部904は、Macro eNodeB側の現在のサブフレーム番号がBCH、PSS、SSSなどの信号を含むサブフレームであることを示す場合には、バーチャル・キャリヤの制御領域PDCCH_MTCの送信停止を決定するとともに、X2インターフェース経由での調整によりPDSCH_MTCの送信を抑制することを決定する。
【0109】
また、図10には、図9に示したPico eNodeBに属するUE端末(MTC端末)として動作する無線通信装置1000の構成例を模式的に示している。
【0110】
無線通信装置1000は、アンテナで送受信する無線信号のアナログ処理を行なうRF通信処理部1001と、ディジタル送信信号の変調並びにディジタル受信信号の復調処理を行なうディジタル通信処理部1002を備えている。ディジタル通信処理部1002は、自装置1000の通信レイヤーの上位層プロトコルとの間で送受信データをやり取りする。
【0111】
無線通信装置1000は、例えばBCH信号によって、Pico eNodeBからバーチャル・キャリヤを送信するサブフレーム位置が通知されている。バーチャル・キャリヤ・サブフレーム位置保持部1003は、自分が収容されたピコセル内でバーチャル・キャリヤが挿入されるサブフレームの位置を記憶している。そして、ディジタル通信処理部1002は、バーチャル・キャリヤが挿入されるサブフレームの位置において、バーチャル・キャリヤの受信処理を行なう。
【0112】
図11には、ピコセル内でバーチャル・キャリヤを運用するための処理手順をフローチャートの形式で示している。
【0113】
Pico eNodeBは、自分のピコセル内でバーチャル・キャリヤを送信するサブフレームの位置を決定する(ステップS1101)。
【0114】
次いで、Pico eNodeBは、ステップS1101で決定した上記情報を、BCH信号を用いて自セル内のUE端末(MTC端末)に通知する(ステップS1102)。
【0115】
そして、UE端末(MTC端末)は、バーチャル・キャリヤが挿入されたサブフレームの位置を認識して、その受信処理を行なう(ステップS1103)。
【0116】
課題2:PDCCHからPDCCH_MTCへの干渉
ここでは、PDCCH_MTCとPDSCH_MTCで構成されるバーチャル・キャリヤは、Pico eNodeB(小電力送信のノード)から送信されているキャリヤ(すなわち、バーチャル・キャリヤが被干渉の立場となること)を想定する。但し、バーチャル・キャリヤが与干渉の場合にも、同様の課題が存在するとともに、後述する手段で解決することができる。
【0117】
この課題は、Macro eNodeBとPico eNodeBの間の同期が完全でない場合に発生する。例えばPico eNodeBの同期精度を確保できなくて、Macro eNodeBとPico eNodeBの間にOFDMシンボル単位でのズレが生じている場合である。
【0118】
同期が完全でない場合も、課題1、すなわち、Macro eNodeBから送信されるBCH、PSS、SSSによるPico eNodeBのPDCCH_MTCへの干渉も依然として起きる可能性がある。しかし、課題2では、Macro eNodeBから送信されるPDCCHがPico eNodeBのPDCCH_MTCに与える影響に限定して考察する。
【0119】
Macro eNodeBとPico eNodeBの間の同期がずれる方向によっては、Macro eNodeBのPDCCHと、Pico eNodeBのPDCCH_MTCの位置が重なり、この結果、Pico eNodeBのRange Expansion AreaのUE端末がPDCCH_MTCを受信することが困難になることが予想される。図5には、Macro eNodeBのPDCCHと、Pico eNodeBのPDCCH_MTCの位置が重なっている様子を示している。
【0120】
Pico eNodeBの同期精度を確保できない場合だけでなく、Macro eNodeBとPico eNodeBのPDCCH間の干渉を低減するために、敢えて(意図して)OFDMシンボル単位でずらす場合もある。図5を再び参照すると、PDCCHとPDCCH_MTCの位置は重なっていないので、一方のPDCCHを優先して、他方のPDCCHを停止する必要がないことが分かる。したがって、このような状況下でバーチャル・キャリヤの制御領域PDCCH_MTCへの干渉を低減することは重要である。
【0121】
手段2−1:干渉源のeNodeBのPDCCHのUE Specific Search Spaceの範囲に制限をつける方法を提案する。
【0122】
すなわち、図6に示すように、Macro eNodeB側の制御領域PDCCHのUE Specific Search Spaceを、Pico eNodeB側の制御領域PDCCH_MTCで使用する中心の72サブキャリヤを除いて自セルのダウンリンクのサブフレームの制御情報PDCCHを配置して、Pico eNodeBのPDCCH_MTCを干渉しないようにする。
【0123】
図6に示す例では、制御信号自体が中心の72サブキャリヤを除いて配置される。したがって、UE端末側のSearch Spaceからこの中心の72サブキャリヤを除かなくても、UE端末で中心の72サブキャリヤの部分のCCEをBlind Decodingしても、CRCがエラーになるので、問題ない。あるいは、この部分はUE端末がUE Specific Search SpaceとしてSearchしないと認識してデコードしないという動作を行なうようにしてもよい。後者は、UE端末への負担が軽減されるというメリットがある。
【0124】
Macro eNodeBは、X2インターフェース、S−GW、並びにMME経由で、Pico eNodeBと通信して、バーチャル・キャリヤを配置している周波数帯を把握する。そして、Macro eNodeBは、Pico eNodeBがバーチャル・キャリヤの制御領域PDCCH_MTCを配置している周波数帯を外して、制御情報PDCCHを送信するようにする。
【0125】
なお、UE端末が中心の72サブキャリヤの部分をSearch若しくはデコードしないようにする方法として、UE Specific Search Spaceの場所を決定するハッシュ関数が、中心の72サブキャリヤの部分を避けて指定するようにすればよい。その1つの方法として、ハッシュ関数の指定するアドレスから中心の72サブキャリヤの部分を最初から除いて指定するようにすればよい。
【0126】
また、ハッシュ関数の指定を72サブキャリヤの左部分の領域から指定する方法、及び、右側の領域を左側と同一にするという方法がある。
【0127】
手段2−2:バーチャル・キャリヤの制御領域PDCCH_MTCを、PDCCHのCommon Search Spaceを避けて配置する方法を提案する。
【0128】
手段2−1のSearch Spaceの範囲に制限をつける方法は、Search SpaceとしてUE Specific Search Spaceを想定したものである。しかし、Macro eNodeBは、セル半径次第ではCommon Search Spaceが必要となる場合があり、これをCCEの先頭から連続して配置しなければならない。Common Search Spaceは、すべてのUE端末がSearchしてBlind Decodingを試行する領域であるので、送信を停止することは望ましくない。図6に示したように中心の72サブキャリヤを除いてCommon Search Spaceを配置する場合、このCommon Search Spaceが中心の72サブキャリヤの領域に到達してしまうと問題である。
【0129】
Common Search Spaceの領域は、1OFDMシンボル目の周波数が低い方から576サブキャリヤを必要とする(前述)。Macro eNodeBが20MHzのバンド幅を選択したときのサブキャリヤ数は1201であるから(表1を参照のこと)、CCEの先頭からCommon Search Spaceを連続的に配置すると、図7に示すように中心の72サブキャリヤには達しないので、手段2−1によりCommon Search Spaceを使用することが可能である。しかしながら、15MHz以下のバンド幅を選択したときには中心の72サブキャリヤを避けてCommon Search SpaceをCCEの先頭から連続的に配置することはできない。
【0130】
そこで、手段2−2として、図8に示すように、Pico eNodeBは、使用するバンド幅に合わせて、バーチャル・キャリヤを、Common Search Spaceの範囲を外して配置するようにする。また、Macro eNodeBは、手段2−1により、制御領域PDCCH(UE Specific Search Space)を、Pico eNodeB側の制御領域PDCCH_MTCで使用するサブキャリヤを除いて指定して、Pico eNodeBのPDCCH_MTCを干渉しないようにする。
【0131】
Pico eNodeBは、X2インターフェース、S−GW、並びにMME経由で、Macro eNodeBと通信して、Macro eNodeB側で、Common Search Spaceを記載している帯域の情報を取得する。 そして、Pico eNodeBは、このCommon Search Spaceの帯域を避けて、バーチャル・キャリヤの制御領域PDCCH_MTCを送信するようにする。
【0132】
図12には、上記の各手段2−1、2−2を実現するMacro eNodeBとして動作する無線通信装置1200の構成例を模式的に示している。
【0133】
無線通信装置1200は、アンテナで送受信する無線信号のアナログ処理を行なうRF通信処理部1201と、ディジタル送信信号の変調並びにディジタル受信信号の復調処理を行なうディジタル通信処理部1202を備えている。ディジタル通信処理部1202は、自装置1200の通信レイヤーの上位層プロトコルとの間で送受信データをやり取りする。また、ディジタル通信処理部1202は、X2インターフェース、S−GW、並びにMME経由で他のeNodeBと通信する。
【0134】
Macro eNodeBサブフレーム番号特定部1207は、Macro eNodeBのサブフレーム番号を特定する。Pico eNodeBサブフレーム番号特定部1208は、Pico eNodeBのサブフレーム番号を特定する。オフセット情報取得部1209は、Macro eNodeBとPico eNodeBのサブフレーム間のずれ量をOFDMシンボル単位で特定する。そして、干渉制御部1206は、Pico eNodeBが送信するバーチャル・キャリヤの制御領域PDCCH_MTCが存在する周波数帯を特定する。
【0135】
ハッシュ関数管理部1205は、干渉制御部1206でPDCCH_MTCを干渉すると同定された位置に応じて、各サブフレームで使用するハッシュ関数を決定する。Search Space決定部1204は、干渉制御部1206で干渉すると同定されたサブフレームかどうかを考慮しつつ、ハッシュ関数管理部1205で格納するハッシュ関数を用いて、自セルに参入している各UE端末のUE Specific Search Spaceの場所を決定する。具体的には、Macro eNodeB側の制御領域PDCCHのUE Specific Search Spaceを、Pico eNodeB側の制御領域PDCCH_MTCで使用する帯域を除いて指定Macro eNodeB側の制御領域PDCCHのUE Specific Search Spaceを、Pico eNodeB側の制御領域PDCCH_MTCで使用する中心の72サブキャリヤを除いて指定する。そして、CCE挿入制御部1203は、決定したSpecific Search Spaceに基づいて、各CCEのPDCCHへの挿入を制御する。
【0136】
また、図13には、図12に示したMacro eNodeBに属するUE端末として動作する無線通信装置1300の構成例を模式的に示している。
【0137】
無線通信装置1300は、アンテナで送受信する無線信号のアナログ処理を行なうRF通信処理部1301と、ディジタル送信信号の変調並びにディジタル受信信号の復調処理を行なうディジタル通信処理部1302を備えている。ディジタル通信処理部1302は、自装置1300の通信レイヤーの上位層プロトコルとの間で送受信データをやり取りする。
【0138】
ハッシュ関数管理部1305は、各サブフレームで使用するハッシュ関数を決定する。Search Space決定部1304は、Search Spaceの場所を決定する。また、Search Space決定部1304は、ハッシュ関数管理部1305で格納するハッシュ関数を用いて、自端末のUE Specific Search Spaceの場所を決定する。そして、Blind decoding部2003は、決定したUE Specific Search Spaceに基づいて、Macro eNodeBのPDCCHをBlind decodingする。
【0139】
なお、ドナー帯域20MHzの一部の帯域に制限したバーチャル・キャリヤを運用するには、バーチャル・キャリヤを送信するeNodeBに参入するUE端末(MTC端末)は、バーチャル・キャリヤの位置を認識する仕組みが必要である。以下では、MTC端末が、eNodeBからバーチャル・キャリヤを受信できるようになるための処理手順について説明する。
【0140】
ステップ1:MTC端末が、対応するeNodeBを選択する。
MTC端末は、ターゲットであるeNodeBに対して同期処理を行なう。同期処理は、特定のサブフレームに挿入されているPSSやSSS(前述)を用いて行なう。MTC端末は、同期したeNodeBからのCell Specific Reference signalなどのリファレンス信号を受信して、受信電力強度RSRPに相当する値を取得する。基本的にはRSRPが一番強いeNodeBに対して接続することを選択するが、MTC端末は、Pico eNodeBのRSRPに対しては10dB〜15dB程度のオフセットをつけて比較を行ない、Pico eNodeBに接続し易くする。MTC端末は、狭帯域の信号しか受信できないように製作されている。eNodeBのPSSやSSSは、ドナー帯域20MHzのうち中心の72サブキャリヤに配置されているので、RSRPの取得もこの中心の72サブキャリヤの信号を使って行うのが適当だと考ええられる。
【0141】
ステップ2:MTC端末が、選択したeNodeBのバーチャル・キャリヤの位置を把握する。
MTCは、接続するeNodeBを上記のステップ1により決定した後は、そのeNodeBにおいて、どの周波数位置(サブキャリヤ)を用いてバーチャル・キャリヤが運用されているかを把握する必要がある。
【0142】
その1つの方法として、eNodeBが送信するシステム情報を用いることが挙げられる。eNodeBからシステム情報BCHとしてブロードキャストされている情報の中に、バーチャル・キャリヤの周波数位置が記載されており、MTC端末は、ステップ1においてドナー帯域の中心72サブキャリヤを受信しているときに、このシステム情報を取得することにより、バーチャル・キャリヤの周波数位置を認識することができる。
【0143】
また、他の方法として、MTC端末がスキャンしてバーチャル・キャリヤを発見することが挙げられる。但し、スキャン動作はMTC端末への負荷が大きく、超低消費電力というMTCの特徴(前述)と相反することになる。
【0144】
ステップ3:MTC端末が、バーチャル・キャリヤの制御領域PDCCH_MTCの時間方向の位置情報を取得する。
【0145】
その1つの方法として、eNodeBが送信するシステム情報を用いることが挙げられる。eNodeBからシステム情報BCHとしてブロードキャストされている情報の中に、バーチャル・キャリヤの周波数位置が記載されており、MTC端末は、ステップ1においてドナー帯域の中心72サブキャリヤを受信しているときに、このシステム情報を取得することにより、バーチャル・キャリヤの時間方向の位置を認識することができる。
【0146】
また、他の方法として、MTC端末が、バーチャル・キャリヤの中をBlind Decodingして、所望の制御情報を取得することにより、その場所を取得することが挙げられる。Blind Decodingは、通常のPDCCHの中の自分宛てのCCEを取得する方法として、一般のLTEで用いられている方法である。ここでは、PDCCH_MTCの最初を示すCCEは、すべての端末が受信できるようにしておく。各MTC端末は、バーチャル・キャリヤ内をBlind Decodingし、CRCがOKとなる場所を探し、それをPDCCH_MTCの最初であると認識することができる。
【0147】
MTC端末は、以上のステップ1〜ステップ3の処理手順に従って、接続するeNodeBを決定し、バーチャル・キャリヤの位置を取得し、バーチャル・キャリヤ内のPDCCH_MTCの位置を取得することができ、この結果、本明細書で開示する技術を実施することが可能になる。
【0148】
なお、本明細書の開示の技術は、以下のような構成をとることも可能である。
(1)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される周波数位置(ドナー領域の中心72サブキャリヤ)の情報を取得する情報取得部と、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)を、前記所定の必須情報BCH、PSS、SSSが配置される周波数位置を避けて送信するバーチャル・キャリヤ送信制御部を具備する無線通信装置(Pico eNodeB又はMacro eNodeB)。
(2)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれている、上記(1)に記載の無線通信装置。
(3)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれていない、上記(1)に記載の無線通信装置。
(4)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される場所の情報を取得する情報取得部と、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)の運用を停止するバーチャル・キャリヤ運用部を具備する無線通信装置(Pico eNodeB又はMacro eNodeB)。
(5)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれている、上記(4)に記載の無線通信装置。
(6)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれていない、上記(4)に記載の無線通信装置。
(7)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される場所の情報を取得する情報取得部と、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうち制御情報PDCCH_MTCの送信を停止するバーチャル・キャリヤ運用部を具備する無線通信装置(Pico eNodeB又はMacro eNodeB)。
(8)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれている、上記(7)に記載の無線通信装置。
(9)隣接基地局Pico eNodeBがダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCが配置されている周波数帯の情報を取得する情報取得部と、前記隣接基地局Pico eNodeBがバーチャル・キャリヤの制御領域PDCCH_MTCを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するサブフレーム送信制御部を具備する無線通信装置。
(10)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれていない、上記(9)に記載の無線通信装置。
(11)隣接基地局Macro eNodeBが送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報Common Search Spaceが記載された帯域の情報を取得する情報取得部と、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、前記隣接基地局Macro eNodeBが前記制御情報Common Search Spaceを送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCを送信するバーチャル・キャリヤ送信制御部を具備する無線通信装置(Pico eNodeB)。
(12)前記隣接基地局Macro eNodeB又はPico eNodeBとの間でサブフレームの同期がとれていない、上記(11)に記載の無線通信装置。
(13)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される周波数位置(ドナー領域の中心72サブキャリヤ)の情報を取得するステップと、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)を、前記所定の必須情報BCH、PSS、SSSが配置される周波数位置を避けて送信するステップを有する無線通信方法。
(14)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される場所の情報を取得するステップと、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)の運用を停止するバーチャル・キャリヤ運用ステップを有する無線通信方法。
(15)隣接基地局Macro eNodeB又はPico eNodeBが送信するダウンリンクのサブフレームのデータ領域PDSCHで所定の必須情報BCH、PSS、SSSが配置される場所の情報を取得するステップと、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちPDCCH_MTCの送信を停止するバーチャル・キャリヤ運用ステップを有する無線通信方法。
(16)隣接基地局Pico eNodeBがダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCが配置されている周波数帯の情報を取得するステップと、前記隣接基地局Pico eNodeBがバーチャル・キャリヤの制御領域PDCCH_MTCを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するステップを有する無線通信方法。
(17)隣接基地局Macro eNodeBが送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報Common Search Spaceが記載された帯域の情報を取得するステップと、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、前記隣接基地局Macro eNodeBが前記制御情報Common Search Spaceを送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCを送信するステップを有する無線通信方法。
(18)自セルのダウンリンクの所定の位置のサブフレームのデータ領域PDSCHの所定の周波数位置(ドナー領域の中心72サブキャリヤ)に所定の必須情報BCH、PSS、SSSを配置する第1の基地局Macro eNodeBと、
自セルのダウンリンクのサブフレームのデータ領域PDSCHで、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)を、前記所定の必須情報BCH、PSS、SSSが配置される周波数位置を避けて送信する第2の基地局Pico eNodeBと、
を具備する無線通信システム。
(19)自セルのダウンリンクの所定の位置のサブフレームのデータ領域PDSCHに所定の必須情報BCH、PSS、SSSを配置する第1の基地局Macro eNodeBと、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)の運用を停止する第2の基地局を具備する無線通信システム。
(20)自セルのダウンリンクの所定の位置のサブフレームのデータ領域PDSCHに所定の必須情報BCH、PSS、SSSを配置する第1の基地局Macro eNodeBと、前記所定の必須情報BCH、PSS、SSSが配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域PDSCHでは、ドナー帯域よりも狭帯域となるバーチャル・キャリヤ(PDCCH_MTC、PDSCH_MTC)のうちPDCCH_MTCの送信を停止する第2の基地局を具備する無線通信システム。
(21)自セルのダウンリンクのサブフレームのデータ領域PDSCHの所定の周波数帯で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを送信する第1の基地局Pico eNodeBと、前記第1の基地局がバーチャル・キャリヤの制御領域PDCCH_MTCを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信する第2の基地局Macro eNodeBを具備する無線通信システム。
(22)自セル内の全端末宛ての制御情報Common Search Spaceを含んだサブフレームを送信する第1の基地局Macro eNodeBと、自セルのダウンリンクのサブフレームのデータ領域PDSCHで、前記第1の基地局Macro eNodeBが前記制御情報Common Search Spaceを送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域PDCCH_MTCを送信する第2の基地局Pico eNodeBを具備する無線通信システム。
【産業上の利用可能性】
【0149】
以上、特定の実施形態を参照しながら、本明細書で開示する技術について詳細に説明してきた。しかしながら、本明細書で開示する技術の要旨を逸脱しない範囲で当業者が該実施形態の修正や代用を成し得ることは自明である。
【0150】
本明細書では、3GPPが策定したLTEに従うセルラー通信システムに適用した実施形態を中心に説明してきたが、本明細書で開示する技術の要旨はこれに限定されるものではない。サイズの異なるセルが階層化されたさまざまなセルラー通信システムに、本明細書で開示する技術を同様に適用することができる。
【0151】
要するに、例示という形態により本明細書で開示する技術について説明してきたのであり、本明細書の記載内容を限定的に解釈するべきではない。本明細書で開示する技術の要旨を判断するためには、特許請求の範囲を参酌すべきである。
【符号の説明】
【0152】
900…無線通信装置
901…RF通信処理部
902…ディジタル通信処理部
903…バーチャル・キャリヤ制御部
904…バーチャル・キャリヤ・サブフレーム位置決定部
905…Macro eNodeBサブフレーム番号特定部
906…Pico eNodeBサブフレーム番号特定部
1000…無線通信装置
1001…RF通信処理部
1002…ディジタル通信処理部
1003…バーチャル・キャリヤ・サブフレーム位置保持部
1200…無線通信装置
1201…RF通信処理部
1202…ディジタル通信処理部
1203…CCE挿入制御部
1204…Search Space決定部
1205…ハッシュ関数管理部
1206…干渉制御部
1207…Macro eNodeBサブフレーム番号特定部
1208…Pico eNodeBサブフレーム番号特定部
1209…オフセット情報取得部
1300…無線通信装置
1301…RF通信処理部
1302…ディジタル通信処理部
1303…Blind decoding部
1304…Search Space決定部
1305…ハッシュ関数管理部
【特許請求の範囲】
【請求項1】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される周波数位置の情報を取得する情報取得部と、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信するバーチャル・キャリヤ送信制御部と、
を具備する無線通信装置。
【請求項2】
前記隣接基地局との間でサブフレームの同期がとれている、
請求項1に記載の無線通信装置。
【請求項3】
前記隣接基地局との間でサブフレームの同期がとれていない、
請求項1に記載の無線通信装置。
【請求項4】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得する情報取得部と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止するバーチャル・キャリヤ運用部と、
を具備する無線通信装置。
【請求項5】
前記隣接基地局との間でサブフレームの同期がとれている、
請求項4に記載の無線通信装置。
【請求項6】
前記隣接基地局との間でサブフレームの同期がとれていない、
請求項4に記載の無線通信装置。
【請求項7】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得する情報取得部と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうち制御情報の送信を停止するバーチャル・キャリヤ運用部と、
を具備する無線通信装置。
【請求項8】
前記隣接基地局との間でサブフレームの同期がとれている、
請求項7に記載の無線通信装置。
【請求項9】
隣接基地局がダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域が配置されている周波数帯の情報を取得する情報取得部と、
前記隣接基地局がバーチャル・キャリヤの制御領域を配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するサブフレーム送信制御部と、
を具備する無線通信装置。
【請求項10】
前記隣接基地局との間でサブフレームの同期がとれていない、
請求項9に記載の無線通信装置。
【請求項11】
隣接基地局Mが送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報が記載された帯域の情報を取得する情報取得部と、
自セルのダウンリンクのサブフレームのデータ領域で、前記隣接基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信するバーチャル・キャリヤ送信制御部と、
を具備する無線通信装置。
【請求項12】
前記隣接基地局との間でサブフレームの同期がとれていない、
請求項11に記載の無線通信装置。
【請求項13】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される周波数位置の情報を取得するステップと、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信するステップと、
を有する無線通信方法。
【請求項14】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得するステップと、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止するバーチャル・キャリヤ運用ステップと、
を有する無線通信方法。
【請求項15】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得するステップと、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちの送信を停止するバーチャル・キャリヤ運用ステップと、
を有する無線通信方法。
【請求項16】
隣接基地局がダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域が配置されている周波数帯の情報を取得するステップと、
前記隣接基地局がバーチャル・キャリヤの制御領域Cを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するステップと、
を有する無線通信方法。
【請求項17】
隣接基地局が送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報が記載された帯域の情報を取得するステップと、
自セルのダウンリンクのサブフレームのデータ領域で、前記隣接基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信するステップと、
を有する無線通信方法。
【請求項18】
自セルのダウンリンクの所定の位置のサブフレームのデータ領域の所定の周波数位置に所定の必須情報を配置する第1の基地局と、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信する第2の基地局と、
を具備する無線通信システム。
【請求項19】
自セルのダウンリンクの所定の位置のサブフレームのデータ領域に所定の必須情報を配置する第1の基地局と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止する第2の基地局と、
を具備する無線通信システム。
【請求項20】
自セルのダウンリンクの所定の位置のサブフレームのデータ領域に所定の必須情報を配置する第1の基地局と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちの送信を停止する第2の基地局と、
を具備する無線通信システム。
【請求項21】
自セルのダウンリンクのサブフレームのデータ領域の所定の周波数帯で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを送信する第1の基地局と、
前記第1の基地局がバーチャル・キャリヤの制御領域を配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信する第2の基地局と、
を具備する無線通信システム。
【請求項22】
自セル内の全端末宛ての制御情報を含んだサブフレームを送信する第1の基地局と、
自セルのダウンリンクのサブフレームのデータ領域で、前記第1の基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信する第2の基地局と、
を具備する無線通信システム。
【請求項1】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される周波数位置の情報を取得する情報取得部と、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信するバーチャル・キャリヤ送信制御部と、
を具備する無線通信装置。
【請求項2】
前記隣接基地局との間でサブフレームの同期がとれている、
請求項1に記載の無線通信装置。
【請求項3】
前記隣接基地局との間でサブフレームの同期がとれていない、
請求項1に記載の無線通信装置。
【請求項4】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得する情報取得部と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止するバーチャル・キャリヤ運用部と、
を具備する無線通信装置。
【請求項5】
前記隣接基地局との間でサブフレームの同期がとれている、
請求項4に記載の無線通信装置。
【請求項6】
前記隣接基地局との間でサブフレームの同期がとれていない、
請求項4に記載の無線通信装置。
【請求項7】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得する情報取得部と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうち制御情報の送信を停止するバーチャル・キャリヤ運用部と、
を具備する無線通信装置。
【請求項8】
前記隣接基地局との間でサブフレームの同期がとれている、
請求項7に記載の無線通信装置。
【請求項9】
隣接基地局がダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域が配置されている周波数帯の情報を取得する情報取得部と、
前記隣接基地局がバーチャル・キャリヤの制御領域を配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するサブフレーム送信制御部と、
を具備する無線通信装置。
【請求項10】
前記隣接基地局との間でサブフレームの同期がとれていない、
請求項9に記載の無線通信装置。
【請求項11】
隣接基地局Mが送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報が記載された帯域の情報を取得する情報取得部と、
自セルのダウンリンクのサブフレームのデータ領域で、前記隣接基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信するバーチャル・キャリヤ送信制御部と、
を具備する無線通信装置。
【請求項12】
前記隣接基地局との間でサブフレームの同期がとれていない、
請求項11に記載の無線通信装置。
【請求項13】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される周波数位置の情報を取得するステップと、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信するステップと、
を有する無線通信方法。
【請求項14】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得するステップと、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止するバーチャル・キャリヤ運用ステップと、
を有する無線通信方法。
【請求項15】
隣接基地局が送信するダウンリンクのサブフレームのデータ領域で所定の必須情報が配置される場所の情報を取得するステップと、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちの送信を停止するバーチャル・キャリヤ運用ステップと、
を有する無線通信方法。
【請求項16】
隣接基地局がダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域が配置されている周波数帯の情報を取得するステップと、
前記隣接基地局がバーチャル・キャリヤの制御領域Cを配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信するステップと、
を有する無線通信方法。
【請求項17】
隣接基地局が送信するダウンリンクのサブフレームに含まれる当該隣接セル内の全端末宛ての制御情報が記載された帯域の情報を取得するステップと、
自セルのダウンリンクのサブフレームのデータ領域で、前記隣接基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信するステップと、
を有する無線通信方法。
【請求項18】
自セルのダウンリンクの所定の位置のサブフレームのデータ領域の所定の周波数位置に所定の必須情報を配置する第1の基地局と、
自セルのダウンリンクのサブフレームのデータ領域で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを、前記所定の必須情報が配置される周波数位置を避けて送信する第2の基地局と、
を具備する無線通信システム。
【請求項19】
自セルのダウンリンクの所定の位置のサブフレームのデータ領域に所定の必須情報を配置する第1の基地局と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの運用を停止する第2の基地局と、
を具備する無線通信システム。
【請求項20】
自セルのダウンリンクの所定の位置のサブフレームのデータ領域に所定の必須情報を配置する第1の基地局と、
前記所定の必須情報が配置されたサブフレームと重なる自セルのダウンリンクのサブフレームのデータ領域では、ドナー帯域よりも狭帯域となるバーチャル・キャリヤのうちの送信を停止する第2の基地局と、
を具備する無線通信システム。
【請求項21】
自セルのダウンリンクのサブフレームのデータ領域の所定の周波数帯で、ドナー帯域よりも狭帯域となるバーチャル・キャリヤを送信する第1の基地局と、
前記第1の基地局がバーチャル・キャリヤの制御領域を配置している前記周波数帯を外して、自セルのダウンリンクのサブフレームの制御情報を送信する第2の基地局と、
を具備する無線通信システム。
【請求項22】
自セル内の全端末宛ての制御情報を含んだサブフレームを送信する第1の基地局と、
自セルのダウンリンクのサブフレームのデータ領域で、前記第1の基地局が前記制御情報を送信する帯域を避けて、ドナー帯域よりも狭帯域となるバーチャル・キャリヤの制御領域を送信する第2の基地局と、
を具備する無線通信システム。
【図1】

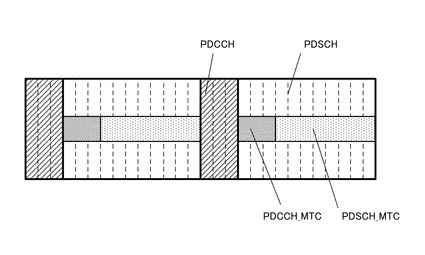
【図2】
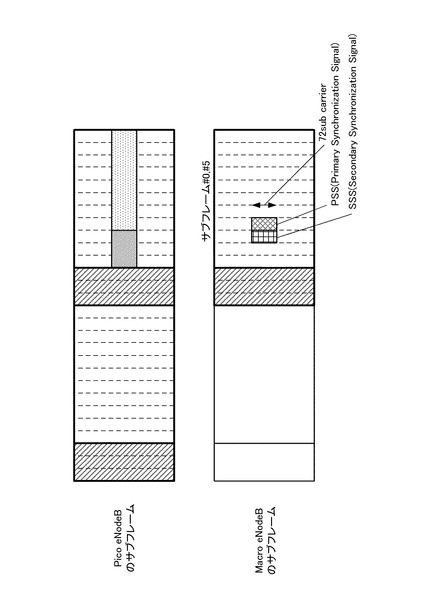
【図3】
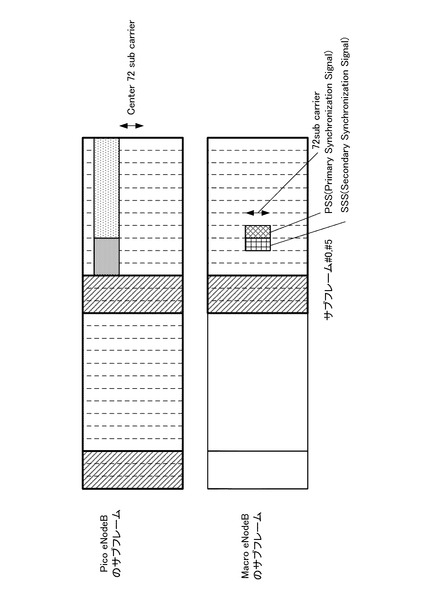
【図4】
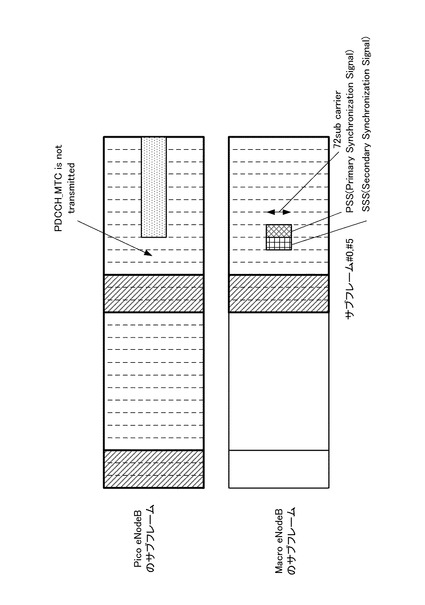
【図5】
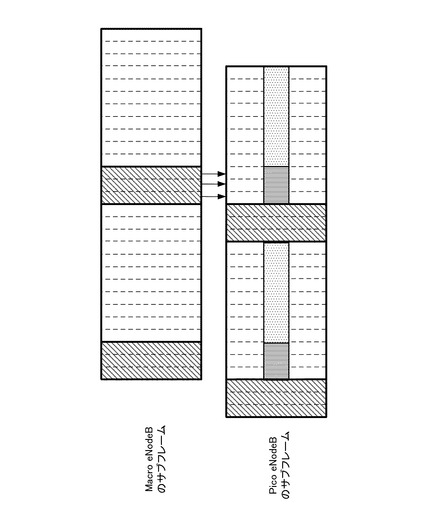
【図6】
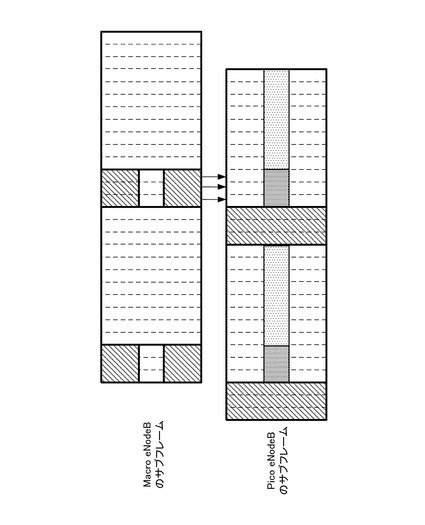
【図7】
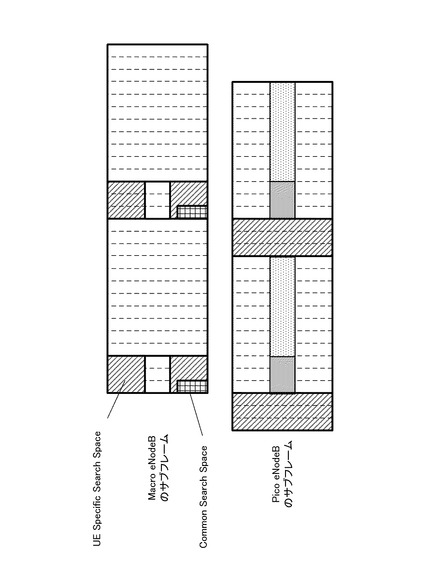
【図8】
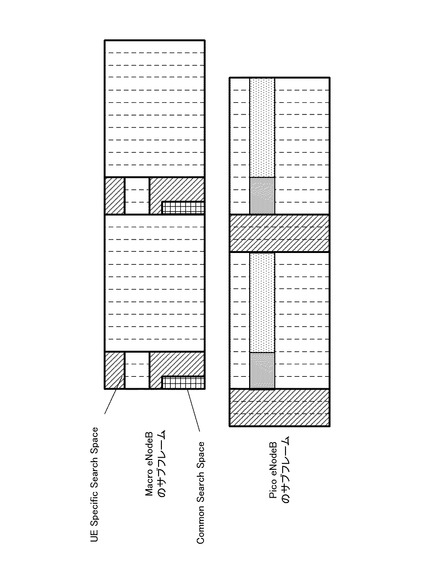
【図9】
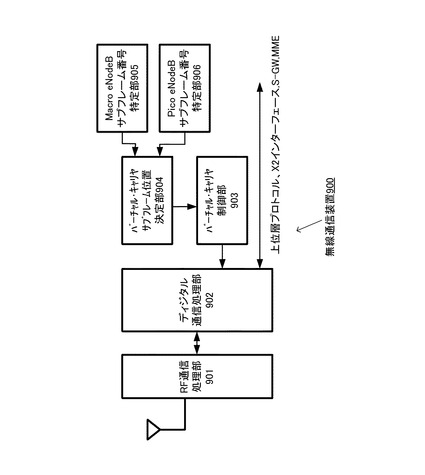
【図10】
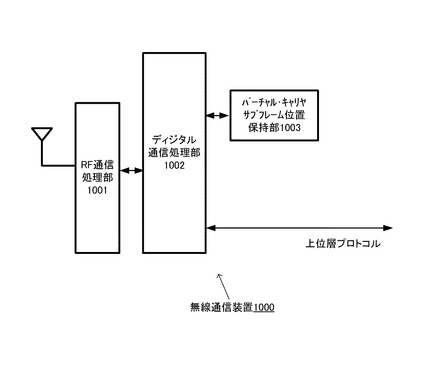
【図11】
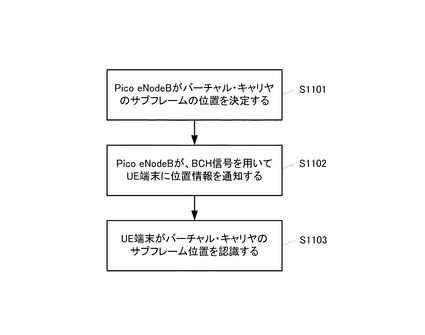
【図12】
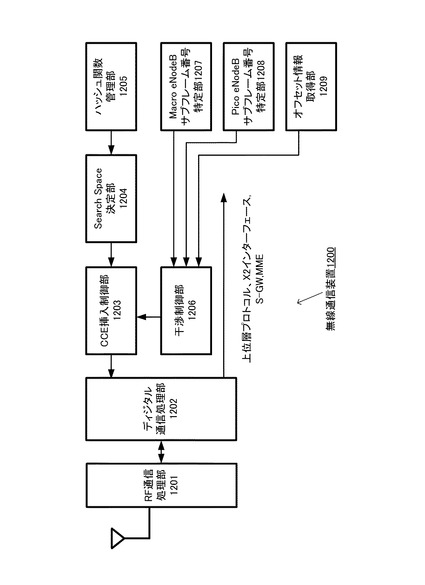
【図13】
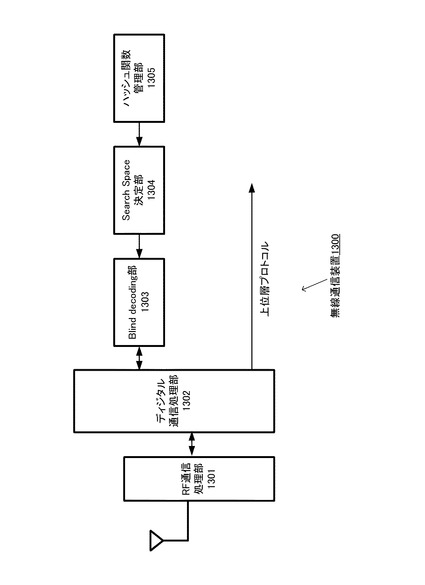
【図16】
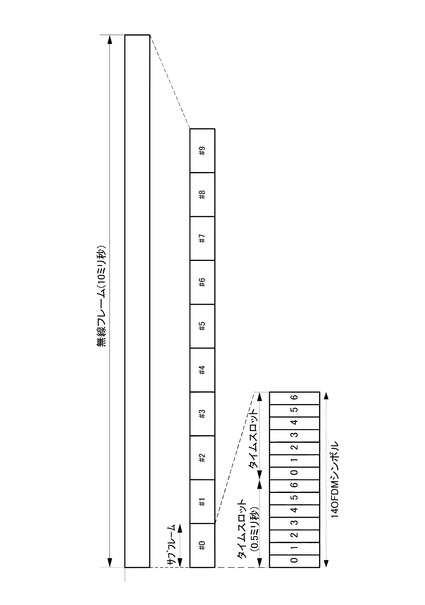
【図17】
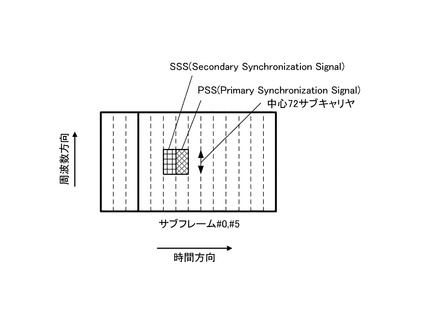
【図18】
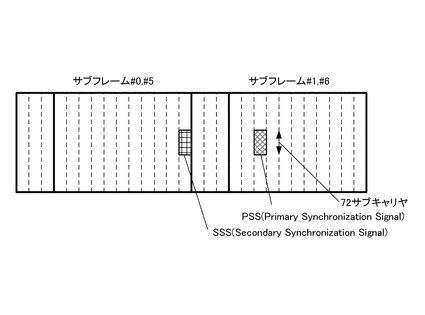
【図19】
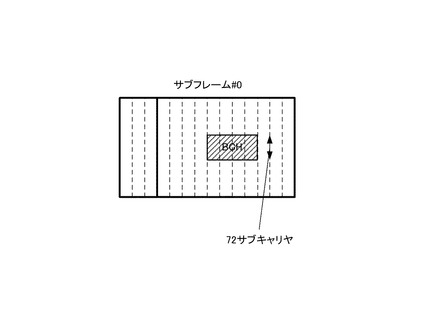
【図21】
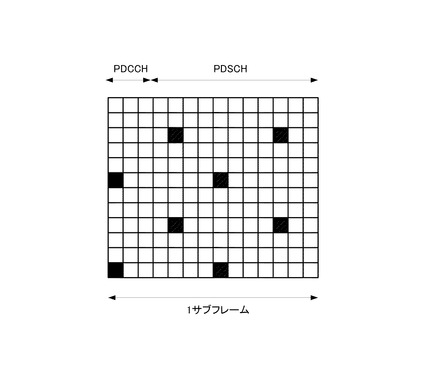
【図22】
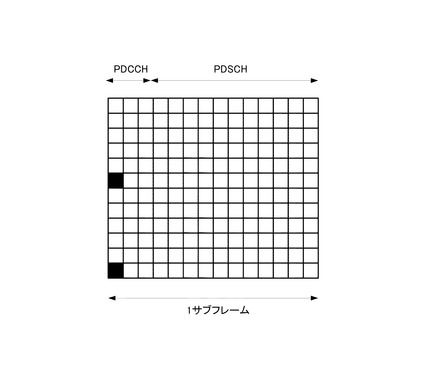
【図23】
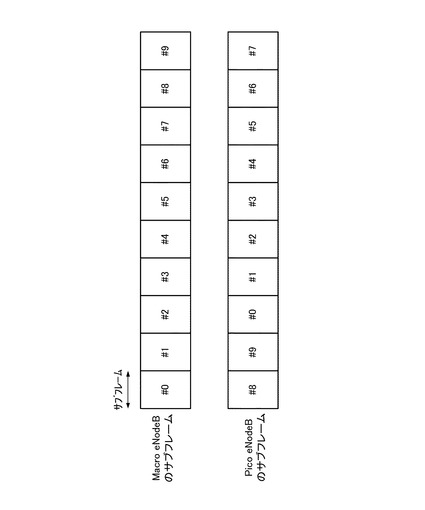
【図24】
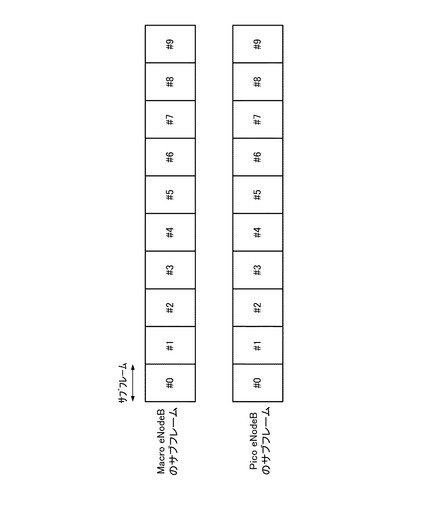
【図14】
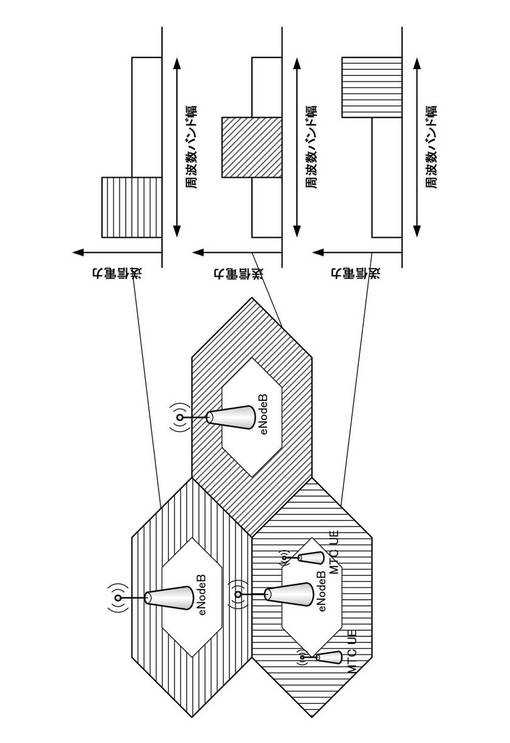
【図15】
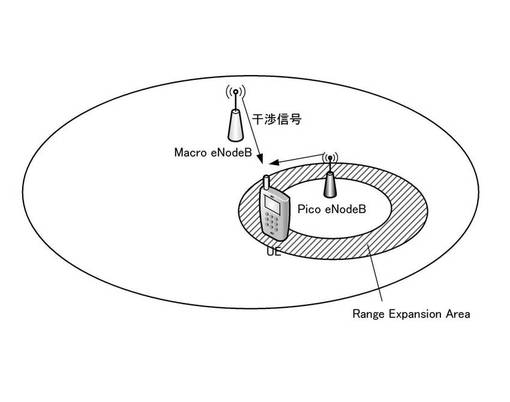
【図20】
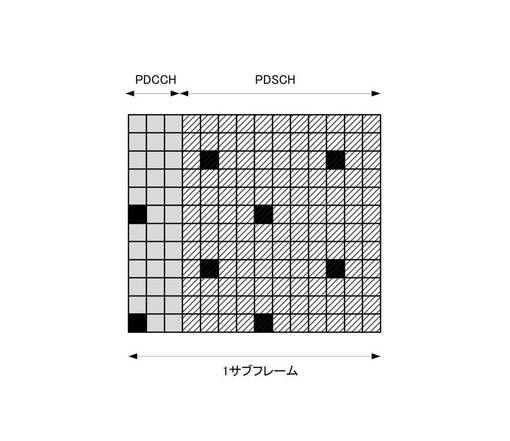
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図16】
【図17】
【図18】
【図19】
【図21】
【図22】
【図23】
【図24】
【図14】
【図15】
【図20】
【公開番号】特開2013−85086(P2013−85086A)
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願番号】特願2011−223052(P2011−223052)
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
【公開日】平成25年5月9日(2013.5.9)
【国際特許分類】
【出願日】平成23年10月7日(2011.10.7)
【出願人】(000002185)ソニー株式会社 (34,172)
【Fターム(参考)】
[ Back to top ]