
無線通信装置
【課題】ユーザの利便性の向上を図る。
【解決手段】周囲装置数計測部11は、周囲に存在する無線装置の数を計測する。移動量計測部12は、自装置が移動しているときの加速度を検出し、自装置の移動量を計測する。周囲音分析部13は、周囲音を収録し、収録した周囲音を分析して周囲音分析情報を生成する。通信制御部14は、計測された装置数と、計測された移動量と、周囲音分析情報との少なくとも1つにもとづいて、自装置の周囲状況を推定し、推定した周囲状況に応じて、自装置の通信制御を自律的に行う。
【解決手段】周囲装置数計測部11は、周囲に存在する無線装置の数を計測する。移動量計測部12は、自装置が移動しているときの加速度を検出し、自装置の移動量を計測する。周囲音分析部13は、周囲音を収録し、収録した周囲音を分析して周囲音分析情報を生成する。通信制御部14は、計測された装置数と、計測された移動量と、周囲音分析情報との少なくとも1つにもとづいて、自装置の周囲状況を推定し、推定した周囲状況に応じて、自装置の通信制御を自律的に行う。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、無線通信を行う無線通信装置に関する。無線通信装置として、例えば、携帯電話機が含まれる。
【背景技術】
【0002】
無線通信ネットワークは、情報通信ネットワークの基盤形成の核となるもので、一層のサービスの高度化、広域化が望まれており、情報化社会に向けて急速に開発が進んでいる。
【0003】
特に携帯電話機の普及率は急激に増加しており、ユーザにとって、聞きやすさ/見やすさ/使いやすさを高めた機種の開発が望まれている。また、近年では、周囲の無線環境を測定し、測定結果にもとづいて無線制御を行うシステムが開発されている。
【0004】
例えば、移動アドホック通信において、無線回線を監視して、クライアント側ブルーツース(Bluetooth:登録商標)装置と、サーバ側ブルーツース装置とでリンクを確立し、他ブルーツース装置によりオファーされるサービスを発見する技術がある(特許文献1)。
【0005】
また、優先通信に対応するパケットを検出して優先通信の通信数を計測し、アソシエーションしている端末の接続数を計測して、これら計測結果に応じてパケットのトラフィック量を制御する技術が提案されている(特許文献2)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特表2006−510124号公報
【特許文献2】特開2007−134812号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記の従来技術のように、周囲の状況を認識して無線制御を行う場合、周囲端末の機能や台数を把握してトラフィック制御を行うといったことを目的としたものが多く、携帯電話機を使用しているユーザが、現在どのような状況下に置かれ、どのようなサービスを提供すれば使いやすさを高めることができるかといったことまで踏み込んだ技術は少ない。このため、推定したユーザの周囲状況に応じて自律的な制御を行って、ユーザにとって使いやすさを高めた携帯電話機の開発が期待されている。
【0008】
本発明はこのような点に鑑みてなされたものであり、ユーザの周囲状況を推定し、周囲状況に応じて自律的に通信制御を行うことで、ユーザの利便性の向上を図った無線通信装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、無線通信装置が提供される。この無線通信装置は、周囲に存在する装置の数である周囲装置数を計測する周囲装置数計測部と、自装置の移動量を計測する移動量計測部と、周囲音を分析して周囲音分析情報を生成する周囲音分析部と、前記周囲装置数、前記移動量及び前記周囲音分析情報の少なくとも1つにもとづいて、自装置の周囲状況を推定し、周囲状況に応じた通信制御を自律的に行う通信制御部とを有する。
【0010】
ここで、周囲装置数計測部は、周囲に存在する装置の数を計測する。移動量計測部は、自装置の移動量を計測する。周囲音分析部は、周囲音を分析して周囲音分析情報を生成する。通信制御部は、周囲装置数、移動量及び周囲音分析情報の少なくとも1つにもとづいて、自装置の周囲状況を推定し、周囲状況に応じた通信制御を自律的に行う。
【発明の効果】
【0011】
ユーザの利便性の向上を図る。
【図面の簡単な説明】
【0012】
【図1】無線通信装置の構成例を示す図である。
【図2】周囲装置数を計測する際の動作例を示す図である。
【図3】周囲状況の推定動作を示す全体フローチャートである。
【図4】周囲状況推定テーブルを示す図である。
【発明を実施するための形態】
【0013】
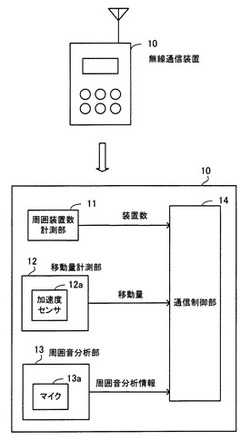
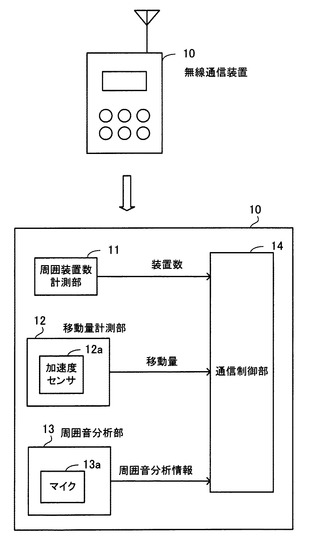
以下、本発明の実施の形態を図面を参照して説明する。図1は無線通信装置の構成例を示す図である。無線通信装置10は、周囲装置数計測部11、移動量計測部12、周囲音分析部13及び通信制御部14を備えて、無線通信を行う装置である。無線通信装置10は、例えば、携帯電話機に該当する。
【0014】
周囲装置数計測部11は、無線通信インタフェース機能を有し、無線通信インタフェース機能を通じて、周囲に存在する装置(無線装置)の数を計測する。周囲に存在する装置とは、例えば、他の携帯電話機などが該当する。
【0015】
移動量計測部12は、加速度センサ12aを含む。加速度センサ12aによって、自装置(無線通信装置10)が移動しているときの移動量(加速度もしくは速度)を計測する。なお、加速度センサ12aは、MEMS(Micro Electro Mechanical System)技術によって、小型で高精度なセンサが実用化されており、装置内部に搭載された加速度センサ12aによって、自装置が移動しているか、静止しているかの検出が可能である。
【0016】
周囲音分析部13は、音響センサに該当するマイク13aを含み、マイク13aによって収録された周囲音を分析して周囲音分析情報を生成する。通信制御部14は、計測された装置数と、計測された移動量と、周囲音分析情報との少なくとも1つにもとづいて、自装置の周囲状況を推定する。そして、推定した周囲状況に応じた通信制御を自律的に行う。
【0017】
ここで、推定した周囲状況に応じて通信制御を行うとは、例えば、通話が不可能な周囲状況が推定される場合には、通信制御として、呼出音の鳴動を停止したり、または通話が可能な周囲状況が推定される場合には、通信制御として、呼出音を鳴動しての着信を行ったりすることである。このように、無線通信装置10では、推定した周囲状況に合った通信形態を選択するように、適応的な制御を実行する(詳細は後述する)。
【0018】
次に周囲装置数計測部11について説明する。端末(無線装置)同士が直接接続してネットワークを構築するアドホックネットワーク(Ad Hoc Network)においては、端末自身がルーティング機能を有しており、無線通信のための経路の保持や経路の発見を行う経路制御が行われる。
【0019】
経路制御方式としては、リアクティブ(Reactive)型と呼ばれる方式があり、これは、データ転送が行われるときに経路発見を行うもので、通信要求時、周囲の端末の存在を、電波を出して確かめて経路表を作成するものである。周囲装置数計測部11では、このようなアドホックネットワークで用いられる経路制御(例えば、リアクティブ型経路制御)を利用して、周囲に存在する装置数の計測を行う。
【0020】
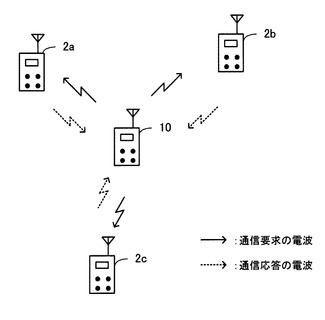
図2は周囲装置数を計測する際の動作例を示す図である。無線通信装置10の周囲に、無線機器2a〜2cが存在している。無線通信装置10内の周囲装置数計測部11及び無線機器2a〜2cは、経路表を作成する際に、近距離間で互いに電波を放出して周囲の装置の存在を認識する近距離無線通信機能を有している。
【0021】
ここで、無線通信装置10が周囲装置の数を計測する場合、周囲装置数計測部11は、電波(通信要求の電波)を周囲に放出する。無線機器2a〜2cに電波が到達すると、無線機器2a〜2cは、電波を受けたことを示す返信用の電波(通信応答の電波)をそれぞれ放出する。周囲装置数計測部11では、周囲の無線装置2a〜2cから返信された電波を受信することで、自装置の周囲に存在する他無線機器の台数を計測する。
【0022】
上記のように、周囲装置数計測部11は、アドホックネットワークで用いられる経路制御を利用して、周囲に存在する装置数の計測を行うことができる。また、他の方法として、自己が無線接続するネットワークに対して、周囲に存在する無線装置の数の問い合わせを行って周囲装置数を取得してもよい。
【0023】
すなわち、無線通信装置10が無線通信を行っている無線エリア内に位置する基地局やサーバに対して、該当無線エリア内に存在する他無線装置の数を問い合わせて、周囲装置数を取得してもよい。
【0024】
このように、周囲装置数計測部11において、アドホックネットワークで適用される経路制御、またはネットワーク問い合わせを行うことで、近接の無線機器の台数を的確に把握することが可能になる。
【0025】
なお、その他の方法としては、Bluetoothや赤外線通信機能(IrDA:Infrared Data Association)などの無線通信機能を備えて、周囲に存在する無線装置を検出して周囲装置数を計測することもできる。または、ブロードキャスティングにより自情報を互いに通知することで、周囲に存在する無線装置を検出して周囲装置数を計測するといったことも可能である。
【0026】
次に周囲音分析部13について説明する。周囲音分析部13では、マイク13aから収録した周囲音を分析して周囲音分析情報を生成するが、周囲音分析情報として具体的には、周囲音レベルとバブル性分析値とを生成する。
【0027】
周囲音レベルは、例えば、ユーザが通話状態にない場合に(このような状態は、通信呼が確立していないことを検出することで把握できる)、周囲音の振幅を測定したレベル値であって、一定時間長の平均レベルを使用する。この周囲音レベルの大小によって、無線通信装置10を使用しているユーザの周囲が、喧騒か静寂かを判断することが可能となる。
【0028】
また、バブル性分析値は、周囲音の中に人の声の特徴量が含まれる度合い(混合度合い)を示すものであって、周囲音のスペクトル分析等を行うことにより、無線通信装置10を利用しているユーザ以外の人声(バブル騒音)成分を検出できる。バブル性分析値が高いか低いかによって、無線通信装置10を使用しているユーザが雑踏の中にいるか否かを判断することが可能となる。
【0029】
ここで、周囲音レベルの算出方法について説明する。周囲音レベルは、ディジタル音声信号の振幅値の自乗平均として求めることができ、以下の式(1)で算出される。
【0030】
【数1】

【0031】
x(i)は入力音声、Nは電力レベルを算出するフレームのサンプル数で、例えば、a秒の平均値を求める場合には、8kHzサンプリング条件でN=8000×aとなる。式(1)で求めた周囲音レベルpowを、あらかじめ設定したしきい値と比較することで、無線通信装置10が騒がしい状況にあるか否かを推定することができる。
【0032】
例えば、−40dBovを騒がしさの境界とすると、約−40dBovに相当する107374(自乗値)をしきい値とし、このしきい値を超えていれば喧騒が存在する環境と判定し、超えていなければ静かな環境であると判定する。
【0033】
次にバブル性分析値の算出方法について説明する。音声の特徴量分析の一例としては、音声の生成過程の伝達関数を線形フィルタとして同定する線形予測分析が利用できる。これは音源信号が声道を通って、音色に色づけされる調音特性を複数の極点を持つ線形フィルタで同定する手法であって、音声符号化などで活用されている。
【0034】
この線形予測分析は、以下の式(2)に示す通り、過去のp個の信号を用いた線形結合、つまり線形フィルタ表現で現在の信号を予測する手法である。
【0035】
【数2】
【0036】
xa(n)は現在の予測サンプル、αiが予測係数、pが予測次数、x(n−i)は過去のサンプルを示す。予測係数は、予測サンプルと実際のサンプルの間の誤差(式(3)に示すe(n))を最小化する係数として求めることができる(例えば、自己相関法の方程式からDurbinの再帰的解法などで求めることができる)。
【0037】
e(n)=x(n)−xa(n)・・・(3)
線形予測フィルタの入力である音声信号x(n)と、出力である予測残差信号e(n)との電力比(予測利得)は、線形予測性能と対応づけることができ、この予測利得値から音声の度合いを推測することができる。
【0038】
具体的な予測利得Gpの算出は式(4)で求まる。
【0039】
【数3】
【0040】
γiは自己相関係数、kiは偏自己相関係数である。予測利得は音声の場合10〜14dBとなることが知られているため、しきい値0.3と比較して0.3以下であれば音声の混入度が高いと判定できる。
【0041】
一方、音声の特徴を把握する他の方法としては、ピッチ性を利用することもできる。ピッチ性とは、声帯の振動周期に相当する周期性のことで、周期が短いと声のトーンが高く、周期が長いと声のトーンが低くなる。これは周期長に対応するサンプル間での相関が高くなることに相当するものである。相関の最大値を与える周期Lにおける相関値(ピッチ相関値)は、式(5)で求めることができる。
【0042】
【数4】
【0043】
ピッチ相関値は0〜1.0の値をとり、1.0に近いほどピッチ性が高い。このため、例えばしきい値0.7と比較して、予測利得が高く、かつピッチ相関が0.7以上であれば音声の混入度が高いと判定できる。したがって、上記のような予測利得やピッチ相関値を、バブル性を表す数値表現とすることが可能である。
【0044】
次に推定した周囲状況に応じて通信制御を行う場合の具体例について説明する。まず、通信制御部14が有する4つのしきい値について説明する。通信制御部14は、周囲装置の数が多いか少ないかを判別するための第1のしきい値(以下、装置数しきい値と呼ぶ)を設定する。また、周囲音の音量レベルが高いか低いかを判別するための第2のしきい値(以下、音量しきい値と呼ぶ)を設定する。
【0045】
さらに、周囲音の中に人声の特徴量が多く含まれるか否かを判別するための第3のしきい値(以下、バブル性しきい値と呼ぶ)を設定する。さらにまた、自装置の移動速度が大きいか小さいか、すなわち静止しているか移動しているを判別するための第4のしきい値(以下、移動量しきい値と呼ぶ)を設定する。
【0046】
通信制御部14では、装置数と装置数しきい値との比較、周囲音レベルと音量しきい値との比較、バブル性分析値とバブル性しきい値との比較、移動量と移動量しきい値との比較の少なくとも1つの比較処理を行うことで、周囲状況を適切に推定し、周囲状況に応じた通信制御を行うものである。
【0047】
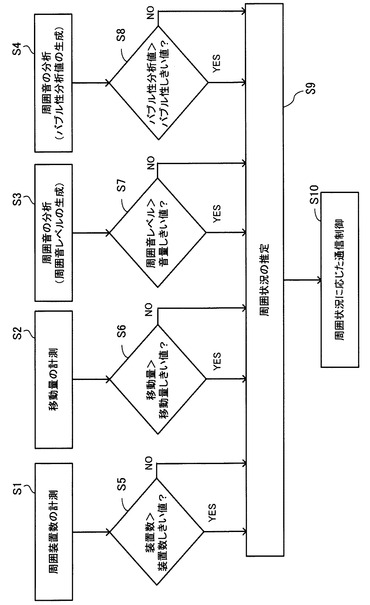
図3は周囲状況の推定動作を示す全体フローチャートである。
〔S1〕周囲装置数計測部11は、周囲装置数を計測する。
〔S2〕移動量計測部12は、自装置の移動量を計測する。
【0048】
〔S3〕周囲音分析部13は、周囲音を分析して周囲音レベルを生成する。
〔S4〕周囲音分析部13は、周囲音を分析してバブル性分析値を生成する。
〔S5〕通信制御部14は、周囲装置数計測部11で計測された装置数と、あらかじめ設定された装置数しきい値との比較を行い、比較結果を出力する。
【0049】
〔S6〕通信制御部14は、移動量計測部12で計測された移動量と、あらかじめ設定された移動量しきい値との比較を行い、比較結果を出力する。
〔S7〕通信制御部14は、周囲音分析部13で生成された周囲音レベルと、あらかじめ設定された音量しきい値との比較を行い、比較結果を出力する。
【0050】
〔S8〕通信制御部14は、周囲音分析部13で生成されたバブル性分析値と、あらかじめ設定されたバブル性しきい値との比較を行い、比較結果を出力する。
〔S9〕通信制御部14は、ステップS5〜S8で出力された比較結果から周囲状況を推定する。
【0051】
〔S10〕通信制御部14は、周囲状況の推定結果にもとづいて、現状の周囲状況に応じた通信制御を自律的に行う。
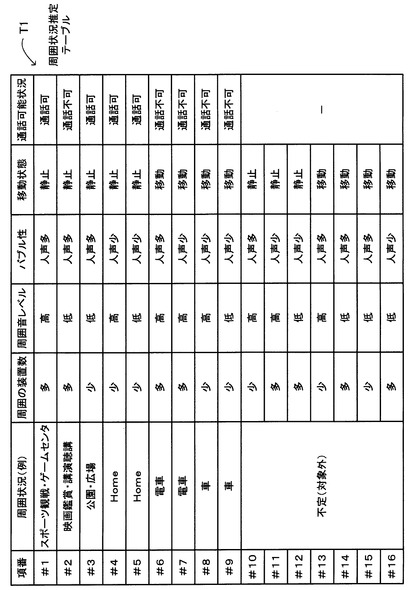
図4は周囲状況推定テーブルを示す図である。周囲状況推定テーブルT1は、図3のステップS5〜S8に示したYES、NOの判断にもとづいた状態(24通りある)を示している。また、周囲状況推定テーブルT1は、項番、周囲状況、周囲の装置数、周囲音レベル、バブル性、移動状態及び通話可能状況の属性項目から構成されている。なお、周囲状況推定テーブルT1の情報は、通信制御部14のメモリ内に登録される。
【0052】
(1)周囲状況推定テーブルT1の項番#1について。
装置数が装置数しきい値を超えて周囲装置数が多いと判別し(判別結果a1とする)、周囲音レベルが音量しきい値を超えて周囲音レベルが高いと判別したとする(判別結果a2とする)。
【0053】
さらに、バブル性分析値がバブル性しきい値を超えて人声が多いと判別し(判別結果a3とする)、移動量が移動量しきい値を超えずに自装置の移動速度が小さいと判別したとする(判別結果a4とする)。
【0054】
この場合、判別結果a1から周囲には人が多く、判別結果a2から周囲には喧騒があり、判別結果a3から人声が多く、判別結果a4から静止していると推定される。このような周囲状況は、通話が可能な周囲状況であると推定でき、例えば、スポーツ競技場やゲームセンタなどにユーザがいると推定される。
【0055】
したがって、通信制御の一例として、通話の受信時には、呼出音を鳴動する通信制御を行う。または、呼出音の鳴動を徐々に大きくしての受信を行うとした通信制御を行ってもよい。
【0056】
(2)周囲状況推定テーブルT1の項番#2について。
装置数が装置数しきい値を超えて周囲装置数が多いと判別し(判別結果b1とする)、周囲音レベルが音量しきい値を超えずに周囲音レベルが低いと判別したとする(判別結果b2とする)。
【0057】
さらに、バブル性分析値がバブル性しきい値を超えて人声が多いと判別し(判別結果b3とする)、移動量が移動量しきい値を超えずに自装置の移動速度が小さいと判別したとする(判別結果b4とする)。
【0058】
この場合、判別結果b1から周囲には人が多く、判別結果b2から周囲は静かであり、判別結果b3から人声が多く、判別結果b4から静止していると推定される。このような周囲状況は、通話が不可能な周囲状況であると推定でき、例えば、映画館や講演聴講の会場などにユーザがいると推定される。
【0059】
したがって、通信制御の一例として、通話の受信時には、呼出音による鳴動を停止するような通信制御を行う。または、呼出音を鳴動しての受信を不可として、マナーモード着信に切り替えたり、自動音声応答に切り替えるとした通信制御を行ってもよい。
【0060】
(3)周囲状況推定テーブルT1の項番#3について。
装置数が装置数しきい値を超えずに周囲装置数が少ないと判別し(判別結果c1とする)、周囲音レベルが音量しきい値を超えずに周囲音レベルが低いと判別したとする(判別結果c2とする)。
【0061】
さらに、バブル性分析値がバブル性しきい値を超えて人声が多いと判別し(判別結果c3とする)、移動量が移動量しきい値を超えずに自装置の移動速度が小さいと判別したとする(判別結果c4とする)。
【0062】
この場合、判別結果c1から周囲には人が少なく、判別結果c2から周囲は静かであり、判別結果c3から人声が多く、判別結果c4から静止していると推定される。このような周囲状況は、通話が可能な周囲状況であると推定でき、例えば、公園、広場などにユーザがいると推定される。したがって、通信制御の一例として、通話の受信時には、呼出音を鳴動する通信制御を行う。
【0063】
(4)周囲状況推定テーブルT1の項番#4、#5について。
装置数が装置数しきい値を超えずに周囲装置数が少ないと判別し(判別結果d1とする)、バブル性分析値がバブル性しきい値を超えずに人声が少ないと判別したとする(判別結果d2とする)。
【0064】
さらに、移動量が移動量しきい値を超えずに自装置の移動速度が小さいと判別したとする(判別結果d3とする)。なお、周囲音レベルに関しては、音量しきい値を超えても超えなくてもどちらでもよいとする。
【0065】
この場合、判別結果d1から周囲には人が少なく、判別結果d2から人声が少なく、判別結果d3から静止していると推定される。このような周囲状況は、通話が可能な周囲状況であると推定でき、例えば、家の中などにユーザがいると推定される。したがって、通信制御の一例として、通話の受信時には、呼出音を鳴動する通信制御を行う。
【0066】
(5)周囲状況推定テーブルT1の項番#6、#7について。
装置数が装置数しきい値を超えて装置数が多いと判別し(判別結果e1とする)、周囲音レベルが音量しきい値を超えて周囲音レベルが高いと判別したとする(判別結果e2とする)。
【0067】
さらに、移動量が移動量しきい値を超えて自装置の移動速度が大きいと判別したとする(判別結果e3とする)。なお、バブル性分析値に関しては、バブル性しきい値を超えても超えなくてもどちらでもよいとする。
【0068】
この場合、判別結果e1から周囲には人が多く、判別結果e2から周囲は静かではなく、判別結果e3から移動していると推定される。このような周囲状況は、通話が不可能な周囲状況であると推定でき、例えば、電車内などにユーザがいると推定される。
【0069】
したがって、通信制御の一例として、通話の受信時には、呼出音による鳴動を停止するような通信制御を行う。または、呼出音を鳴動しての受信を不可として、マナーモード着信や自動音声応答に切り替えるとした通信制御を行ってもよい。
【0070】
(6)周囲状況推定テーブルT1の項番#8、#9について。
装置数が装置数しきい値を超えずに周囲装置数が少ないと判別し(判別結果f1とする)、バブル性分析値がバブル性しきい値を超えずに人声が少ないと判別したとする(判別結果f2とする)。
【0071】
さらに、移動量が移動量しきい値を超えて自装置の移動速度が大きいと判別したとする(判別結果f3とする)。なお、周囲音レベルに関しては、音量しきい値を超えても超えなくてもどちらでもよいとする。
【0072】
この場合、判別結果f1から周囲には人が少なく、判別結果f2から人声が少なく、判別結果f3から移動していると推定される。このような周囲状況は、通話が不可能な周囲状況であると推定でき、例えば、車中でユーザが運転中であることが推定される。したがって、通信制御の一例として、呼出音の鳴動による受信を不可とする通信制御を行う(マナーモード着信や自動音声応答としてもよい)。
【0073】
なお、周囲状況推定テーブルT1の項番#10〜#16については制御対象外とする。また、上記では、通話可能な状況では呼出音鳴動による制御を行うとしたが、通話可能な状況でもマナーモード着信に切り替えるような制御を行ってもよい。
【0074】
さらに、上記で示した、推定した周囲状況下における通信制御の内容は一例であって、周囲状況に応じて、どのような通信制御を行うかについては、無線通信装置10に備えられているユーザインタフェース機能を通じて、ユーザが自由に通信制御部14に対して設定可能である。さらにまた、上記で示した4つのしきい値についても、ユーザにより設定値を任意に変更することが可能である。
【0075】
なお、上記では、周囲状況の推定として、周囲装置数、周囲音レベル、バブル性、移動量について考慮しているが、さらにGPS(Global Positioning System)などから測定された位置情報を、周囲状況を推定するための情報として利用してもよく、上記の4つ情報と組み合わせることで、さらに精度を上げることができる。
【0076】
GPS等から取得した位置情報の利用については、無線通信装置10を使用しているユーザが、どのような地理的環境にいるかを認識することができ、その場所が通話可能であるのか否かの判断に使用することが可能である。
【0077】
上記のように、無線通信装置10では、推定した周囲状況に応じて、適切な通信形態をとる制御を行う構成とした。従来では、例えば、利用マナーの観点から、ユーザ自身が携帯電話機の設定を適宜変えることが求められていたが、逐次変化する周囲環境に合わせてその都度変更することは大きな負担となっていった。
【0078】
これに対し、無線通信装置10では、携帯電話機自身がユーザの周囲状況を推定し、通話が可能な状況か不可能な状況かを判断し、推定した周囲状況に応じて、適応的に通信形態の切替制御を行うので、ユーザの利便性の著しい向上を図ることが可能になる。
【0079】
以上説明したように、無線通信装置10は、装置数、移動量及び周囲音分析情報にもとづいて、自装置の周囲状況を推定し、周囲状況に応じて、自装置の通信形式を自律的に制御する構成とした。これにより、ユーザの周囲状況まで考慮した通信制御を行うことができるので、ユーザの使い勝手を格段に向上させることが可能になる。
【0080】
また、通常の携帯電話機に標準搭載されている無線通信インタフェース、加速度センサ、マイクを利用して、これらの機能から周囲状況を推定するための情報を取得して、適応的な通信制御を行うものなので、組み込みソフトウェアのみの変更によって制御が可能となる。したがって、新たなハードウェアを追加する必要がないため、低コストでサービス性の向上を図ることが可能になる。
【符号の説明】
【0081】
10 無線通信装置
11 周囲装置数計測部
12 移動量計測部
12a 加速度センサ
13 周囲音分析部
13a マイク
14 通信制御部
【技術分野】
【0001】
本発明は、無線通信を行う無線通信装置に関する。無線通信装置として、例えば、携帯電話機が含まれる。
【背景技術】
【0002】
無線通信ネットワークは、情報通信ネットワークの基盤形成の核となるもので、一層のサービスの高度化、広域化が望まれており、情報化社会に向けて急速に開発が進んでいる。
【0003】
特に携帯電話機の普及率は急激に増加しており、ユーザにとって、聞きやすさ/見やすさ/使いやすさを高めた機種の開発が望まれている。また、近年では、周囲の無線環境を測定し、測定結果にもとづいて無線制御を行うシステムが開発されている。
【0004】
例えば、移動アドホック通信において、無線回線を監視して、クライアント側ブルーツース(Bluetooth:登録商標)装置と、サーバ側ブルーツース装置とでリンクを確立し、他ブルーツース装置によりオファーされるサービスを発見する技術がある(特許文献1)。
【0005】
また、優先通信に対応するパケットを検出して優先通信の通信数を計測し、アソシエーションしている端末の接続数を計測して、これら計測結果に応じてパケットのトラフィック量を制御する技術が提案されている(特許文献2)。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特表2006−510124号公報
【特許文献2】特開2007−134812号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記の従来技術のように、周囲の状況を認識して無線制御を行う場合、周囲端末の機能や台数を把握してトラフィック制御を行うといったことを目的としたものが多く、携帯電話機を使用しているユーザが、現在どのような状況下に置かれ、どのようなサービスを提供すれば使いやすさを高めることができるかといったことまで踏み込んだ技術は少ない。このため、推定したユーザの周囲状況に応じて自律的な制御を行って、ユーザにとって使いやすさを高めた携帯電話機の開発が期待されている。
【0008】
本発明はこのような点に鑑みてなされたものであり、ユーザの周囲状況を推定し、周囲状況に応じて自律的に通信制御を行うことで、ユーザの利便性の向上を図った無線通信装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するために、無線通信装置が提供される。この無線通信装置は、周囲に存在する装置の数である周囲装置数を計測する周囲装置数計測部と、自装置の移動量を計測する移動量計測部と、周囲音を分析して周囲音分析情報を生成する周囲音分析部と、前記周囲装置数、前記移動量及び前記周囲音分析情報の少なくとも1つにもとづいて、自装置の周囲状況を推定し、周囲状況に応じた通信制御を自律的に行う通信制御部とを有する。
【0010】
ここで、周囲装置数計測部は、周囲に存在する装置の数を計測する。移動量計測部は、自装置の移動量を計測する。周囲音分析部は、周囲音を分析して周囲音分析情報を生成する。通信制御部は、周囲装置数、移動量及び周囲音分析情報の少なくとも1つにもとづいて、自装置の周囲状況を推定し、周囲状況に応じた通信制御を自律的に行う。
【発明の効果】
【0011】
ユーザの利便性の向上を図る。
【図面の簡単な説明】
【0012】
【図1】無線通信装置の構成例を示す図である。
【図2】周囲装置数を計測する際の動作例を示す図である。
【図3】周囲状況の推定動作を示す全体フローチャートである。
【図4】周囲状況推定テーブルを示す図である。
【発明を実施するための形態】
【0013】
以下、本発明の実施の形態を図面を参照して説明する。図1は無線通信装置の構成例を示す図である。無線通信装置10は、周囲装置数計測部11、移動量計測部12、周囲音分析部13及び通信制御部14を備えて、無線通信を行う装置である。無線通信装置10は、例えば、携帯電話機に該当する。
【0014】
周囲装置数計測部11は、無線通信インタフェース機能を有し、無線通信インタフェース機能を通じて、周囲に存在する装置(無線装置)の数を計測する。周囲に存在する装置とは、例えば、他の携帯電話機などが該当する。
【0015】
移動量計測部12は、加速度センサ12aを含む。加速度センサ12aによって、自装置(無線通信装置10)が移動しているときの移動量(加速度もしくは速度)を計測する。なお、加速度センサ12aは、MEMS(Micro Electro Mechanical System)技術によって、小型で高精度なセンサが実用化されており、装置内部に搭載された加速度センサ12aによって、自装置が移動しているか、静止しているかの検出が可能である。
【0016】
周囲音分析部13は、音響センサに該当するマイク13aを含み、マイク13aによって収録された周囲音を分析して周囲音分析情報を生成する。通信制御部14は、計測された装置数と、計測された移動量と、周囲音分析情報との少なくとも1つにもとづいて、自装置の周囲状況を推定する。そして、推定した周囲状況に応じた通信制御を自律的に行う。
【0017】
ここで、推定した周囲状況に応じて通信制御を行うとは、例えば、通話が不可能な周囲状況が推定される場合には、通信制御として、呼出音の鳴動を停止したり、または通話が可能な周囲状況が推定される場合には、通信制御として、呼出音を鳴動しての着信を行ったりすることである。このように、無線通信装置10では、推定した周囲状況に合った通信形態を選択するように、適応的な制御を実行する(詳細は後述する)。
【0018】
次に周囲装置数計測部11について説明する。端末(無線装置)同士が直接接続してネットワークを構築するアドホックネットワーク(Ad Hoc Network)においては、端末自身がルーティング機能を有しており、無線通信のための経路の保持や経路の発見を行う経路制御が行われる。
【0019】
経路制御方式としては、リアクティブ(Reactive)型と呼ばれる方式があり、これは、データ転送が行われるときに経路発見を行うもので、通信要求時、周囲の端末の存在を、電波を出して確かめて経路表を作成するものである。周囲装置数計測部11では、このようなアドホックネットワークで用いられる経路制御(例えば、リアクティブ型経路制御)を利用して、周囲に存在する装置数の計測を行う。
【0020】
図2は周囲装置数を計測する際の動作例を示す図である。無線通信装置10の周囲に、無線機器2a〜2cが存在している。無線通信装置10内の周囲装置数計測部11及び無線機器2a〜2cは、経路表を作成する際に、近距離間で互いに電波を放出して周囲の装置の存在を認識する近距離無線通信機能を有している。
【0021】
ここで、無線通信装置10が周囲装置の数を計測する場合、周囲装置数計測部11は、電波(通信要求の電波)を周囲に放出する。無線機器2a〜2cに電波が到達すると、無線機器2a〜2cは、電波を受けたことを示す返信用の電波(通信応答の電波)をそれぞれ放出する。周囲装置数計測部11では、周囲の無線装置2a〜2cから返信された電波を受信することで、自装置の周囲に存在する他無線機器の台数を計測する。
【0022】
上記のように、周囲装置数計測部11は、アドホックネットワークで用いられる経路制御を利用して、周囲に存在する装置数の計測を行うことができる。また、他の方法として、自己が無線接続するネットワークに対して、周囲に存在する無線装置の数の問い合わせを行って周囲装置数を取得してもよい。
【0023】
すなわち、無線通信装置10が無線通信を行っている無線エリア内に位置する基地局やサーバに対して、該当無線エリア内に存在する他無線装置の数を問い合わせて、周囲装置数を取得してもよい。
【0024】
このように、周囲装置数計測部11において、アドホックネットワークで適用される経路制御、またはネットワーク問い合わせを行うことで、近接の無線機器の台数を的確に把握することが可能になる。
【0025】
なお、その他の方法としては、Bluetoothや赤外線通信機能(IrDA:Infrared Data Association)などの無線通信機能を備えて、周囲に存在する無線装置を検出して周囲装置数を計測することもできる。または、ブロードキャスティングにより自情報を互いに通知することで、周囲に存在する無線装置を検出して周囲装置数を計測するといったことも可能である。
【0026】
次に周囲音分析部13について説明する。周囲音分析部13では、マイク13aから収録した周囲音を分析して周囲音分析情報を生成するが、周囲音分析情報として具体的には、周囲音レベルとバブル性分析値とを生成する。
【0027】
周囲音レベルは、例えば、ユーザが通話状態にない場合に(このような状態は、通信呼が確立していないことを検出することで把握できる)、周囲音の振幅を測定したレベル値であって、一定時間長の平均レベルを使用する。この周囲音レベルの大小によって、無線通信装置10を使用しているユーザの周囲が、喧騒か静寂かを判断することが可能となる。
【0028】
また、バブル性分析値は、周囲音の中に人の声の特徴量が含まれる度合い(混合度合い)を示すものであって、周囲音のスペクトル分析等を行うことにより、無線通信装置10を利用しているユーザ以外の人声(バブル騒音)成分を検出できる。バブル性分析値が高いか低いかによって、無線通信装置10を使用しているユーザが雑踏の中にいるか否かを判断することが可能となる。
【0029】
ここで、周囲音レベルの算出方法について説明する。周囲音レベルは、ディジタル音声信号の振幅値の自乗平均として求めることができ、以下の式(1)で算出される。
【0030】
【数1】
【0031】
x(i)は入力音声、Nは電力レベルを算出するフレームのサンプル数で、例えば、a秒の平均値を求める場合には、8kHzサンプリング条件でN=8000×aとなる。式(1)で求めた周囲音レベルpowを、あらかじめ設定したしきい値と比較することで、無線通信装置10が騒がしい状況にあるか否かを推定することができる。
【0032】
例えば、−40dBovを騒がしさの境界とすると、約−40dBovに相当する107374(自乗値)をしきい値とし、このしきい値を超えていれば喧騒が存在する環境と判定し、超えていなければ静かな環境であると判定する。
【0033】
次にバブル性分析値の算出方法について説明する。音声の特徴量分析の一例としては、音声の生成過程の伝達関数を線形フィルタとして同定する線形予測分析が利用できる。これは音源信号が声道を通って、音色に色づけされる調音特性を複数の極点を持つ線形フィルタで同定する手法であって、音声符号化などで活用されている。
【0034】
この線形予測分析は、以下の式(2)に示す通り、過去のp個の信号を用いた線形結合、つまり線形フィルタ表現で現在の信号を予測する手法である。
【0035】
【数2】
【0036】
xa(n)は現在の予測サンプル、αiが予測係数、pが予測次数、x(n−i)は過去のサンプルを示す。予測係数は、予測サンプルと実際のサンプルの間の誤差(式(3)に示すe(n))を最小化する係数として求めることができる(例えば、自己相関法の方程式からDurbinの再帰的解法などで求めることができる)。
【0037】
e(n)=x(n)−xa(n)・・・(3)
線形予測フィルタの入力である音声信号x(n)と、出力である予測残差信号e(n)との電力比(予測利得)は、線形予測性能と対応づけることができ、この予測利得値から音声の度合いを推測することができる。
【0038】
具体的な予測利得Gpの算出は式(4)で求まる。
【0039】
【数3】
【0040】
γiは自己相関係数、kiは偏自己相関係数である。予測利得は音声の場合10〜14dBとなることが知られているため、しきい値0.3と比較して0.3以下であれば音声の混入度が高いと判定できる。
【0041】
一方、音声の特徴を把握する他の方法としては、ピッチ性を利用することもできる。ピッチ性とは、声帯の振動周期に相当する周期性のことで、周期が短いと声のトーンが高く、周期が長いと声のトーンが低くなる。これは周期長に対応するサンプル間での相関が高くなることに相当するものである。相関の最大値を与える周期Lにおける相関値(ピッチ相関値)は、式(5)で求めることができる。
【0042】
【数4】
【0043】
ピッチ相関値は0〜1.0の値をとり、1.0に近いほどピッチ性が高い。このため、例えばしきい値0.7と比較して、予測利得が高く、かつピッチ相関が0.7以上であれば音声の混入度が高いと判定できる。したがって、上記のような予測利得やピッチ相関値を、バブル性を表す数値表現とすることが可能である。
【0044】
次に推定した周囲状況に応じて通信制御を行う場合の具体例について説明する。まず、通信制御部14が有する4つのしきい値について説明する。通信制御部14は、周囲装置の数が多いか少ないかを判別するための第1のしきい値(以下、装置数しきい値と呼ぶ)を設定する。また、周囲音の音量レベルが高いか低いかを判別するための第2のしきい値(以下、音量しきい値と呼ぶ)を設定する。
【0045】
さらに、周囲音の中に人声の特徴量が多く含まれるか否かを判別するための第3のしきい値(以下、バブル性しきい値と呼ぶ)を設定する。さらにまた、自装置の移動速度が大きいか小さいか、すなわち静止しているか移動しているを判別するための第4のしきい値(以下、移動量しきい値と呼ぶ)を設定する。
【0046】
通信制御部14では、装置数と装置数しきい値との比較、周囲音レベルと音量しきい値との比較、バブル性分析値とバブル性しきい値との比較、移動量と移動量しきい値との比較の少なくとも1つの比較処理を行うことで、周囲状況を適切に推定し、周囲状況に応じた通信制御を行うものである。
【0047】
図3は周囲状況の推定動作を示す全体フローチャートである。
〔S1〕周囲装置数計測部11は、周囲装置数を計測する。
〔S2〕移動量計測部12は、自装置の移動量を計測する。
【0048】
〔S3〕周囲音分析部13は、周囲音を分析して周囲音レベルを生成する。
〔S4〕周囲音分析部13は、周囲音を分析してバブル性分析値を生成する。
〔S5〕通信制御部14は、周囲装置数計測部11で計測された装置数と、あらかじめ設定された装置数しきい値との比較を行い、比較結果を出力する。
【0049】
〔S6〕通信制御部14は、移動量計測部12で計測された移動量と、あらかじめ設定された移動量しきい値との比較を行い、比較結果を出力する。
〔S7〕通信制御部14は、周囲音分析部13で生成された周囲音レベルと、あらかじめ設定された音量しきい値との比較を行い、比較結果を出力する。
【0050】
〔S8〕通信制御部14は、周囲音分析部13で生成されたバブル性分析値と、あらかじめ設定されたバブル性しきい値との比較を行い、比較結果を出力する。
〔S9〕通信制御部14は、ステップS5〜S8で出力された比較結果から周囲状況を推定する。
【0051】
〔S10〕通信制御部14は、周囲状況の推定結果にもとづいて、現状の周囲状況に応じた通信制御を自律的に行う。
図4は周囲状況推定テーブルを示す図である。周囲状況推定テーブルT1は、図3のステップS5〜S8に示したYES、NOの判断にもとづいた状態(24通りある)を示している。また、周囲状況推定テーブルT1は、項番、周囲状況、周囲の装置数、周囲音レベル、バブル性、移動状態及び通話可能状況の属性項目から構成されている。なお、周囲状況推定テーブルT1の情報は、通信制御部14のメモリ内に登録される。
【0052】
(1)周囲状況推定テーブルT1の項番#1について。
装置数が装置数しきい値を超えて周囲装置数が多いと判別し(判別結果a1とする)、周囲音レベルが音量しきい値を超えて周囲音レベルが高いと判別したとする(判別結果a2とする)。
【0053】
さらに、バブル性分析値がバブル性しきい値を超えて人声が多いと判別し(判別結果a3とする)、移動量が移動量しきい値を超えずに自装置の移動速度が小さいと判別したとする(判別結果a4とする)。
【0054】
この場合、判別結果a1から周囲には人が多く、判別結果a2から周囲には喧騒があり、判別結果a3から人声が多く、判別結果a4から静止していると推定される。このような周囲状況は、通話が可能な周囲状況であると推定でき、例えば、スポーツ競技場やゲームセンタなどにユーザがいると推定される。
【0055】
したがって、通信制御の一例として、通話の受信時には、呼出音を鳴動する通信制御を行う。または、呼出音の鳴動を徐々に大きくしての受信を行うとした通信制御を行ってもよい。
【0056】
(2)周囲状況推定テーブルT1の項番#2について。
装置数が装置数しきい値を超えて周囲装置数が多いと判別し(判別結果b1とする)、周囲音レベルが音量しきい値を超えずに周囲音レベルが低いと判別したとする(判別結果b2とする)。
【0057】
さらに、バブル性分析値がバブル性しきい値を超えて人声が多いと判別し(判別結果b3とする)、移動量が移動量しきい値を超えずに自装置の移動速度が小さいと判別したとする(判別結果b4とする)。
【0058】
この場合、判別結果b1から周囲には人が多く、判別結果b2から周囲は静かであり、判別結果b3から人声が多く、判別結果b4から静止していると推定される。このような周囲状況は、通話が不可能な周囲状況であると推定でき、例えば、映画館や講演聴講の会場などにユーザがいると推定される。
【0059】
したがって、通信制御の一例として、通話の受信時には、呼出音による鳴動を停止するような通信制御を行う。または、呼出音を鳴動しての受信を不可として、マナーモード着信に切り替えたり、自動音声応答に切り替えるとした通信制御を行ってもよい。
【0060】
(3)周囲状況推定テーブルT1の項番#3について。
装置数が装置数しきい値を超えずに周囲装置数が少ないと判別し(判別結果c1とする)、周囲音レベルが音量しきい値を超えずに周囲音レベルが低いと判別したとする(判別結果c2とする)。
【0061】
さらに、バブル性分析値がバブル性しきい値を超えて人声が多いと判別し(判別結果c3とする)、移動量が移動量しきい値を超えずに自装置の移動速度が小さいと判別したとする(判別結果c4とする)。
【0062】
この場合、判別結果c1から周囲には人が少なく、判別結果c2から周囲は静かであり、判別結果c3から人声が多く、判別結果c4から静止していると推定される。このような周囲状況は、通話が可能な周囲状況であると推定でき、例えば、公園、広場などにユーザがいると推定される。したがって、通信制御の一例として、通話の受信時には、呼出音を鳴動する通信制御を行う。
【0063】
(4)周囲状況推定テーブルT1の項番#4、#5について。
装置数が装置数しきい値を超えずに周囲装置数が少ないと判別し(判別結果d1とする)、バブル性分析値がバブル性しきい値を超えずに人声が少ないと判別したとする(判別結果d2とする)。
【0064】
さらに、移動量が移動量しきい値を超えずに自装置の移動速度が小さいと判別したとする(判別結果d3とする)。なお、周囲音レベルに関しては、音量しきい値を超えても超えなくてもどちらでもよいとする。
【0065】
この場合、判別結果d1から周囲には人が少なく、判別結果d2から人声が少なく、判別結果d3から静止していると推定される。このような周囲状況は、通話が可能な周囲状況であると推定でき、例えば、家の中などにユーザがいると推定される。したがって、通信制御の一例として、通話の受信時には、呼出音を鳴動する通信制御を行う。
【0066】
(5)周囲状況推定テーブルT1の項番#6、#7について。
装置数が装置数しきい値を超えて装置数が多いと判別し(判別結果e1とする)、周囲音レベルが音量しきい値を超えて周囲音レベルが高いと判別したとする(判別結果e2とする)。
【0067】
さらに、移動量が移動量しきい値を超えて自装置の移動速度が大きいと判別したとする(判別結果e3とする)。なお、バブル性分析値に関しては、バブル性しきい値を超えても超えなくてもどちらでもよいとする。
【0068】
この場合、判別結果e1から周囲には人が多く、判別結果e2から周囲は静かではなく、判別結果e3から移動していると推定される。このような周囲状況は、通話が不可能な周囲状況であると推定でき、例えば、電車内などにユーザがいると推定される。
【0069】
したがって、通信制御の一例として、通話の受信時には、呼出音による鳴動を停止するような通信制御を行う。または、呼出音を鳴動しての受信を不可として、マナーモード着信や自動音声応答に切り替えるとした通信制御を行ってもよい。
【0070】
(6)周囲状況推定テーブルT1の項番#8、#9について。
装置数が装置数しきい値を超えずに周囲装置数が少ないと判別し(判別結果f1とする)、バブル性分析値がバブル性しきい値を超えずに人声が少ないと判別したとする(判別結果f2とする)。
【0071】
さらに、移動量が移動量しきい値を超えて自装置の移動速度が大きいと判別したとする(判別結果f3とする)。なお、周囲音レベルに関しては、音量しきい値を超えても超えなくてもどちらでもよいとする。
【0072】
この場合、判別結果f1から周囲には人が少なく、判別結果f2から人声が少なく、判別結果f3から移動していると推定される。このような周囲状況は、通話が不可能な周囲状況であると推定でき、例えば、車中でユーザが運転中であることが推定される。したがって、通信制御の一例として、呼出音の鳴動による受信を不可とする通信制御を行う(マナーモード着信や自動音声応答としてもよい)。
【0073】
なお、周囲状況推定テーブルT1の項番#10〜#16については制御対象外とする。また、上記では、通話可能な状況では呼出音鳴動による制御を行うとしたが、通話可能な状況でもマナーモード着信に切り替えるような制御を行ってもよい。
【0074】
さらに、上記で示した、推定した周囲状況下における通信制御の内容は一例であって、周囲状況に応じて、どのような通信制御を行うかについては、無線通信装置10に備えられているユーザインタフェース機能を通じて、ユーザが自由に通信制御部14に対して設定可能である。さらにまた、上記で示した4つのしきい値についても、ユーザにより設定値を任意に変更することが可能である。
【0075】
なお、上記では、周囲状況の推定として、周囲装置数、周囲音レベル、バブル性、移動量について考慮しているが、さらにGPS(Global Positioning System)などから測定された位置情報を、周囲状況を推定するための情報として利用してもよく、上記の4つ情報と組み合わせることで、さらに精度を上げることができる。
【0076】
GPS等から取得した位置情報の利用については、無線通信装置10を使用しているユーザが、どのような地理的環境にいるかを認識することができ、その場所が通話可能であるのか否かの判断に使用することが可能である。
【0077】
上記のように、無線通信装置10では、推定した周囲状況に応じて、適切な通信形態をとる制御を行う構成とした。従来では、例えば、利用マナーの観点から、ユーザ自身が携帯電話機の設定を適宜変えることが求められていたが、逐次変化する周囲環境に合わせてその都度変更することは大きな負担となっていった。
【0078】
これに対し、無線通信装置10では、携帯電話機自身がユーザの周囲状況を推定し、通話が可能な状況か不可能な状況かを判断し、推定した周囲状況に応じて、適応的に通信形態の切替制御を行うので、ユーザの利便性の著しい向上を図ることが可能になる。
【0079】
以上説明したように、無線通信装置10は、装置数、移動量及び周囲音分析情報にもとづいて、自装置の周囲状況を推定し、周囲状況に応じて、自装置の通信形式を自律的に制御する構成とした。これにより、ユーザの周囲状況まで考慮した通信制御を行うことができるので、ユーザの使い勝手を格段に向上させることが可能になる。
【0080】
また、通常の携帯電話機に標準搭載されている無線通信インタフェース、加速度センサ、マイクを利用して、これらの機能から周囲状況を推定するための情報を取得して、適応的な通信制御を行うものなので、組み込みソフトウェアのみの変更によって制御が可能となる。したがって、新たなハードウェアを追加する必要がないため、低コストでサービス性の向上を図ることが可能になる。
【符号の説明】
【0081】
10 無線通信装置
11 周囲装置数計測部
12 移動量計測部
12a 加速度センサ
13 周囲音分析部
13a マイク
14 通信制御部
【特許請求の範囲】
【請求項1】
周囲に存在する装置の数である周囲装置数を計測する周囲装置数計測部と、
自装置の移動量を計測する移動量計測部と、
周囲音を分析して周囲音分析情報を生成する周囲音分析部と、
前記周囲装置数、前記移動量及び前記周囲音分析情報の少なくとも1つにもとづいて、自装置の周囲状況を推定し、周囲状況に応じた通信制御を自律的に行う通信制御部と、
を有することを特徴とする無線通信装置。
【請求項2】
前記周囲装置数計測部は、近距離間で互いに電波を放出して周囲装置の存在を認識する近距離無線通信機能を備え、前記近距離無線通信機能を有する周囲装置と近距離無線通信を行って、前記周囲装置数の計測を行うことを特徴とする請求項1記載の無線通信装置。
【請求項3】
前記周囲装置数計測部は、自装置が無線接続するネットワークに対して、周囲に存在する周囲装置の数の問い合わせを行って、前記周囲装置数を取得することを特徴とする請求項1記載の無線通信装置。
【請求項4】
前記周囲音分析部は、前記周囲音分析情報として、周囲音の電力振幅レベルである周囲音レベルと、周囲音の中に人の声の特徴量が含まれる度合いを示すバブル性分析値と、の少なくとも1つを生成することを特徴とする請求項1記載の無線通信装置。
【請求項5】
前記通信制御部は、
前記周囲装置数が多いか少ないかを判別するための第1のしきい値と、
前記周囲音レベルが高いか低いかを判別するための第2のしきい値と、
前記バブル性分析値が示す人声の度合いが多いか少ないかを判別するための第3のしきい値と、
自装置の移動速度が大きいか小さいかを判別するための第4のしきい値と、
を設定し、
前記周囲装置数と前記第1のしきい値との比較、前記周囲音レベルと前記第2のしきい値との比較、前記バブル性分析値と前記第3のしきい値との比較、前記移動量と前記第4のしきい値との比較の少なくとも1つを行うことで、周囲状況を推定し、周囲状況に応じた通信制御を行うことを特徴とする請求項4記載の無線通信装置。
【請求項6】
前記通信制御部は、
前記周囲装置数が前記第1のしきい値を超えて前記周囲装置数が多いと判別し、前記周囲音レベルが前記第2のしきい値を超えて前記周囲音レベルが高いと判別し、前記バブル性分析値が前記第3のしきい値を超えて人声が多く含まれると判別し、前記移動量が前記第4のしきい値を超えず自装置の移動速度が小さいと判別した場合は、通話が可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えて前記周囲装置数が多いと判別し、前記周囲音レベルが前記第2のしきい値を超えず前記周囲音レベルが低いと判別し、前記バブル性分析値が前記第3のしきい値を超えて人声が多く含まれると判別し、前記移動量が前記第4のしきい値を超えず自装置の移動速度が小さいと判別した場合は、通話が不可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えず前記周囲装置数が少ないと判別し、前記周囲音レベルが前記第2のしきい値を超えず前記周囲音レベルが低いと判別し、前記バブル性分析値が前記第3のしきい値を超えて人声が多く含まれると判別し、前記移動量が前記第4のしきい値を超えず自装置の移動速度が小さいと判別した場合は、通話が可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えず前記周囲装置数が少ないと判別し、前記バブル性分析値が前記第3のしきい値を超えず人声が少ないと判別し、前記移動量が前記第4のしきい値を超えず自装置の移動速度が小さいと判別した場合は、通話が可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えて前記周囲装置数が多いと判別し、前記周囲音レベルが前記第2のしきい値を超えて前記周囲音レベルが高いと判別し、前記移動量が前記第4のしきい値を超えて自装置の移動速度が大きいと判別した場合は、通話が不可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えず前記周囲装置数が少ないと判別し、前記バブル性分析値が前記第3のしきい値を超えず人声が少ないと判別し、前記移動量が前記第4のしきい値を超えて自装置の移動速度が大きいと判別した場合は、通話が不可能な周囲状況であると推定する、
ことを特徴とする請求項5記載の無線通信装置。
【請求項7】
前記通信制御部は、通話が可能な周囲状況であると推定した場合は、通信制御として、受信時には呼出音による鳴動を行い、通話が不可能な周囲状況であると推定した場合は、通信制御として、受信時には呼出音による鳴動を停止することを特徴とする請求項1記載の無線通信装置。
【請求項1】
周囲に存在する装置の数である周囲装置数を計測する周囲装置数計測部と、
自装置の移動量を計測する移動量計測部と、
周囲音を分析して周囲音分析情報を生成する周囲音分析部と、
前記周囲装置数、前記移動量及び前記周囲音分析情報の少なくとも1つにもとづいて、自装置の周囲状況を推定し、周囲状況に応じた通信制御を自律的に行う通信制御部と、
を有することを特徴とする無線通信装置。
【請求項2】
前記周囲装置数計測部は、近距離間で互いに電波を放出して周囲装置の存在を認識する近距離無線通信機能を備え、前記近距離無線通信機能を有する周囲装置と近距離無線通信を行って、前記周囲装置数の計測を行うことを特徴とする請求項1記載の無線通信装置。
【請求項3】
前記周囲装置数計測部は、自装置が無線接続するネットワークに対して、周囲に存在する周囲装置の数の問い合わせを行って、前記周囲装置数を取得することを特徴とする請求項1記載の無線通信装置。
【請求項4】
前記周囲音分析部は、前記周囲音分析情報として、周囲音の電力振幅レベルである周囲音レベルと、周囲音の中に人の声の特徴量が含まれる度合いを示すバブル性分析値と、の少なくとも1つを生成することを特徴とする請求項1記載の無線通信装置。
【請求項5】
前記通信制御部は、
前記周囲装置数が多いか少ないかを判別するための第1のしきい値と、
前記周囲音レベルが高いか低いかを判別するための第2のしきい値と、
前記バブル性分析値が示す人声の度合いが多いか少ないかを判別するための第3のしきい値と、
自装置の移動速度が大きいか小さいかを判別するための第4のしきい値と、
を設定し、
前記周囲装置数と前記第1のしきい値との比較、前記周囲音レベルと前記第2のしきい値との比較、前記バブル性分析値と前記第3のしきい値との比較、前記移動量と前記第4のしきい値との比較の少なくとも1つを行うことで、周囲状況を推定し、周囲状況に応じた通信制御を行うことを特徴とする請求項4記載の無線通信装置。
【請求項6】
前記通信制御部は、
前記周囲装置数が前記第1のしきい値を超えて前記周囲装置数が多いと判別し、前記周囲音レベルが前記第2のしきい値を超えて前記周囲音レベルが高いと判別し、前記バブル性分析値が前記第3のしきい値を超えて人声が多く含まれると判別し、前記移動量が前記第4のしきい値を超えず自装置の移動速度が小さいと判別した場合は、通話が可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えて前記周囲装置数が多いと判別し、前記周囲音レベルが前記第2のしきい値を超えず前記周囲音レベルが低いと判別し、前記バブル性分析値が前記第3のしきい値を超えて人声が多く含まれると判別し、前記移動量が前記第4のしきい値を超えず自装置の移動速度が小さいと判別した場合は、通話が不可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えず前記周囲装置数が少ないと判別し、前記周囲音レベルが前記第2のしきい値を超えず前記周囲音レベルが低いと判別し、前記バブル性分析値が前記第3のしきい値を超えて人声が多く含まれると判別し、前記移動量が前記第4のしきい値を超えず自装置の移動速度が小さいと判別した場合は、通話が可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えず前記周囲装置数が少ないと判別し、前記バブル性分析値が前記第3のしきい値を超えず人声が少ないと判別し、前記移動量が前記第4のしきい値を超えず自装置の移動速度が小さいと判別した場合は、通話が可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えて前記周囲装置数が多いと判別し、前記周囲音レベルが前記第2のしきい値を超えて前記周囲音レベルが高いと判別し、前記移動量が前記第4のしきい値を超えて自装置の移動速度が大きいと判別した場合は、通話が不可能な周囲状況であると推定し、
前記周囲装置数が前記第1のしきい値を超えず前記周囲装置数が少ないと判別し、前記バブル性分析値が前記第3のしきい値を超えず人声が少ないと判別し、前記移動量が前記第4のしきい値を超えて自装置の移動速度が大きいと判別した場合は、通話が不可能な周囲状況であると推定する、
ことを特徴とする請求項5記載の無線通信装置。
【請求項7】
前記通信制御部は、通話が可能な周囲状況であると推定した場合は、通信制御として、受信時には呼出音による鳴動を行い、通話が不可能な周囲状況であると推定した場合は、通信制御として、受信時には呼出音による鳴動を停止することを特徴とする請求項1記載の無線通信装置。
【図1】

【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−258687(P2010−258687A)
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願番号】特願2009−105314(P2009−105314)
【出願日】平成21年4月23日(2009.4.23)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
【公開日】平成22年11月11日(2010.11.11)
【国際特許分類】
【出願日】平成21年4月23日(2009.4.23)
【出願人】(000005223)富士通株式会社 (25,993)
【Fターム(参考)】
[ Back to top ]